


خلاصه
با توسعه سریع حمل و نقل شهری، مردم نیاز فوری به نقشه های راه با دقت بالا و به روز دارند. در عین حال، مردم خود منبع مهمی از اطلاعات جادهها برای ساخت نقشه دقیق هستند، زیرا میتوانند سطوح واقعی جادهها را با دستگاههای GPS در طول زندگی روزمره خود تشخیص دهند. داده های ردیابی بزرگ این امکان را فراهم می کند و فرصتی عالی برای استخراج و اصلاح نقشه های راه با هزینه نسبتا کم فراهم می کند. در این مقاله، یک روش اصلاح جدید برای ساخت نقشه راه افزایشی با استفاده از دادههای ردیابی بزرگ، با استفاده از مثلثسازی Delaunay برای دقت بالاتر در طول فرآیند همجوشی جریان ردیابی GPS، پیشنهاد شدهاست. یک آزمایش و ارزیابی بر روی ردپای GPS جمع آوری شده توسط تاکسی ها در ووهان چین انجام شد.
کلید واژه ها:
داده های ردیابی بزرگ ؛ اصلاح نقشه راه ; ادغام داده های ردیابی ; مثلث سازی دلون
1. معرفی
با توسعه سریع زیرساخت های حمل و نقل شهری، مردم نیاز فوری به نقشه های راه با دقت بالا و زمان واقعی دارند. در همان زمان، مقادیر عظیمی از دادههای ردیابی مکانی-زمانی زمانی که مردم هر روز از طریق شبکه جادهای شهری سفر میکنند، تولید میشوند و به عنوان حسگرهای انسانی برای جمعآوری اطلاعات جادهای در زمان واقعی عمل میکنند. نحوه ساخت نقشه راه از این ردپای وسایل نقلیه در همه جا در سال های اخیر توجه بیشتری را به خود جلب کرده است.
مجموعه گسترده ای از ادبیات مربوط به مشکل ساخت نقشه راه از داده های ردیابی خودرو در حال حاضر وجود دارد [ 1 ، 2 ، 3 ، 4 ، 5 ، 6 ، 7 ، 8 ، 9 ، 10 ، 11 ، 12 ، 13 ، 14 ، 15 ، 16. ، 17 ، 18 ، 19 ، 20] که از نظر شکل ورودی داده ها به دو دسته الگوریتم های آفلاین و آنلاین تقسیم می شوند. این روش ها به ترتیب یک مجموعه کامل یا یک جریان پیوسته از داده ها را به عنوان ورودی می گیرند که در بخش بعدی به تفصیل توضیح داده خواهد شد.
همانطور که مقایسه و ارزیابی در مقاله بررسی اخیر روشهای ساخت نقشه نشان میدهد [ 21 ]، نقشههای تولید شده با روشهای آفلاین عموما برتر هستند، روشهای مبتنی بر تراکم دقیقتر و کمتر پیچیدهتر هستند، و روش شناسایی تقاطع و پیوند ایجاد شده توسط Karagiorgou. و همکاران [ 5] رضایتبخشترین نتایج را برای متعادل کردن دقت و پوشش، در میان هفت روش ارزیابیشده، بهدست آورد. با این حال، روشهای افزایشی تنها از نظر پوشش برای خیابانهایی که کمتر از آن عبور میکنند، برتر هستند. علاوه بر این، روشهای افزایشی در زمینه دادههای ردیابی بزرگ ترجیح داده میشوند. با توجه به توسعه محاسبات همه جا حاضر و سیستم های حمل و نقل هوشمند، مقادیر زیادی از آثار معمولاً به طور مداوم به عنوان یک جریان بلادرنگ جمع آوری می شوند. از این رو، روشهای افزایشی باید بیشتر توسعه داده شوند تا دقت آنها افزایش یابد.
روشهای موجود به جز روشهای مبتنی بر چگالی، عمدتاً برای نقاط مسیر فرکانس بالا یا بر اساس این فرض طراحی شدهاند. قرار است هر لبه بین نقاط مسیر مجاور نمونه معتبری از خیابان باشد. با این حال، این اغلب برای منابع داده مانند برنامههای کاربردی ردیابی وسیله نقلیه به چالش کشیده میشود یا درست نیست، زیرا استراتژیهای جمعآوری، انتقال و ذخیرهسازی دادهها وضوح زمانی نسبتاً کمی را برای مکانهای نمونهبرداری شده به دست میدهند [18 ] . یک الگوریتم ساخت نقشه برای داده های ردیابی بزرگ نیز باید این عامل را هنگام تولید استنتاج قوی از هندسه جاده در نظر بگیرد.
با انگیزه استفاده از داده های ردیابی خودروهای عظیم اما با فرکانس پایین در قالب یک جریان به جای مجموعه ای از داده ها، تلاش هایی برای بهبود دقت رویکرد افزایشی برای ساخت نقشه راه صورت گرفته است. جریانهای با فرکانس پایین با استفاده از مثلثسازی محدود Delaunay به صورت تدریجی ادغام میشوند. توپولوژی و هندسه در تقاطع بخشهای جاده نیز برای ورودی دادههای فرکانس پایین با دقت بررسی میشوند. با این حال، سهم این مقاله، ارائه یک روش ساخت نقشه آنلاین برای پخش مداوم دادههای ردیابی بزرگ در فرکانس نمونهبرداری کمتر از ایدهآل است.
ادامه مقاله به شرح زیر است، روش پیشنهادی در بخش 3 پس از بررسی روش های ساخت نقشه موجود در بخش 2 معرفی شده است . در بخش 4 ، ردیابیهای GPS با نرخ نمونهبرداری نسبتاً پایین تقریباً هر 40 ثانیه، که توسط تاکسیهای ووهان، چین جمعآوری میشود، به عنوان منبع داده جریانی برای تأیید روش پیشنهادی و استحکام آن در نظر گرفته میشود. دقت روش پیشنهادی با سایر روشهای افزایشی با معیارهای ارزیابی کیفیت مبتنی بر نمودار مقایسه میشود. صحت توپولوژی تقاطع ها با استفاده از F -score [ 22 ] ارزیابی می شود. در نهایت، نتیجه گیری در بخش 5 آورده شده است .
2. کارهای مرتبط
روش های ساخت نقشه راه موجود را می توان از نظر شکل داده های ورودی به الگوریتم های آفلاین و الگوریتم های آنلاین طبقه بندی کرد.
الگوریتم های آفلاین مجموعه ای از ردیابی های بایگانی شده را به عنوان ورودی می گیرند و همزمان این مجموعه را پردازش می کنند. Edelkamp و Schrodl [ 1 ] نقاط مسیر را با استفاده از یک الگوریتم k -means خوشه بندی کردند. شوردل و همکاران [ 2 ] رویکردی برای خوشهبندی نقاط مسیر از دانههای تصادفی پیشنهاد کرد، و سپس یک نمایش خط مرکزی از جادهها را با تطبیق نقاط مسیر از همان بخش جاده استخراج کرد. آثار مورد استفاده توسط وسایل نقلیه مجهز به گیرنده GPS دیفرانسیل جمع آوری شد. به طور مشابه، Worrall و Nebot [ 3] نقاط مسیر خام را با استفاده از موقعیتهای مشابه با سرفصلهای مشابه خوشهبندی کرد و مراکز خوشهای همسایه را برای تشکیل یک زنجیره منسجم به هم مرتبط کرد. خطوط نهایی مرکز جاده با استفاده از برازش حداقل مربعات غیرخطی به دست آمدند. جدای از این کار اولیه روی روشهای خوشهبندی نقطهای، خوشهبندی یا بستهبندی بخش نیز پیشنهاد شدهاست. لیو و همکاران [ 4 ] یک روش خوشهبندی مشابه ارائه کردند، اگرچه آنها بخشهای کوچکی را که توسط دو نقطه مسیر متوالی در یک آستانه بازه زمانی تشکیل شده بودند، خوشهبندی کردند. علاوه بر این، Karagiorgou و Pfoser [ 5] ردیابی های خوشه ای که بر اساس شناسایی تقاطع های احتمالی، جفت تقاطع های مشابه را به عنوان یک منحنی چند ضلعی به جای بخش مستقیم به هم پیوند می دهند. یک روش Sweep-line برای ادغام هندسه آثار همراه استفاده شده است، در حالی که روش مشابهی با تمرکز بیشتر بر تشخیص مرز تقاطع نیز توسعه داده شده است [ 6 ]. اطلاعات سطح خط نیز می تواند به طور موثر با خوشه بندی استخراج شود [ 7 ، 8 ].
متفاوت از این رویکردهای خوشهبندی، روشهای مبتنی بر چگالی [ 9 ، 10 ، 11 ، 12 ] راه دیگری را برای استخراج نقشههای راه از ردیابی وسایل نقلیه ارائه میکنند، همچنین تمام نقاط مسیر را به عنوان ورودی در نظر میگیرند. در این روش ها ابتدا مجموعه نقاط مسیر در یک منطقه مورد مطالعه به یک تصویر شطرنجی تبدیل می شود. مقدار سلول این تصویر شطرنجی با شمارش ساده نقاط مسیر در یک سلول یا با محاسبه تخمین چگالی هسته نقاط مسیر ورودی تعیین می شود. در نهایت، تکنیک های پردازش تصویر، مانند استخراج اسکلت، برای استخراج هندسه جاده ها از تصویر استفاده می شود.
الگوریتمهای آنلاین جریانی از نقاط مسیر را از یک وسیله نقلیه خاص به عنوان ورودی میگیرند و این جریان ورودی را پردازش میکنند تا به تدریج نقشه راه را بسازند و اصلاح کنند. این نوع رویکرد در کارهای اولیه بر روی بهروزرسانی تدریجی نقشههای راه بر اساس ردیابیهای GPS [ 13 ، 14 ] پدیدار شد، که هر اثری را بهطور متوالی در یک نقشه راه موجود ادغام کرد. اکپنیونگ و همکاران [ 15 ] یک شبکه خنثی مصنوعی برای طبقه بندی نقاط مسیر ورودی بر اساس نوع جاده ایجاد کرد که می تواند جریان های داده ورودی پیوسته را بپذیرد. با توجه به عدم قطعیت ناشی از داده های ردیابی ورودی، Cao و Krumm [ 16] یک مدل فیزیکی جدید برای پیش پردازش آثار ارائه کرد که با تعریف و محاسبه توازن نیروهای جاذبه و دافع در یک مدل به اصطلاح گرانشی، ردیابی ها را روشن می کرد. نقاط مسیر مشخص شده به صورت تدریجی به نقشه راه خالی اضافه میشوند یا بر اساس فاصله و مسیرشان ادغام میشوند. این روش تدریجی ساخت نقشه راه از ابتدا به طور مداوم بهبود یافته است. با استفاده از اندازهگیری فاصله تطبیق نمودار منحنی و یال نماینده حداقل پیوند، احمد و همکاران. [ 17 ] یک روش ساخت نقشه با تخمین خطای نظری پیشنهاد کرد.
برخی از روش های بررسی شده [ 17 ] قادر به مدیریت ردیابی های ورودی سه بعدی هستند، در حالی که روش های اختصاصی برای استخراج نقشه های راه سه بعدی نیز وجود دارد [ 18 ]. ساخت تدریجی نقشه راه دو بعدی از داده های فرکانس پایین خارج از محدوده این مقاله است و بنابراین مورد بحث قرار نمی گیرد.
اخیراً، هر دو روش آنلاین و آفلاین شروع به تمرکز بر روی مسائل عملی منابع داده کمتر از ایدهآل کردهاند، عمدتاً سیستمهای ردیابی خودرو با نقاط مسیر ثبت شده در فرکانس پایینتر. لی و همکاران [ 19 ] موفق شد دادههای ردیابی افزایشی خودرو را در شبکه بزرگراه ملی در مقیاس جغرافیایی بزرگ مدیریت کند، روشی که برای ساخت نقشه در مقیاس کوچک مناسبتر است. کیو و وانگ [ 20] یک راهحل آفلاین به نام چارچوب تقسیمبندی و گروهبندی را پیشنهاد کرد که نقاط ردیابی را خوشهبندی میکند و سپس خطوط مرکزی را با روش هموار پراکندگی با وزن محلی استخراج میکند. روش پیشنهادی در این مقاله در امتداد این مسیر ادامه مییابد، و یک روش ساخت نقشه آنلاین در مقیاس شهر با استفاده از منبع داده ردیابی خودرو کمتر از ایدهآل ارائه میدهد.
3. روش شناسی
این بخش روش ساخت و اصلاح نقشه راه پیشنهادی را با هدف استخراج هندسه و توپولوژی یک شبکه جادهای شهری در سطح بزرگراه توضیح میدهد. همانند روشهای افزایشی رایج، روش پیشنهادی ما دادههای ردیابی ورودی را پیش پردازش میکند تا عدم قطعیت در دادههای جمعآوریشده در شرایط پیچیده را مدیریت کند ( بخش 3.1 ). نقاط مسیر جریان با توجه به جهت و شباهت آنها به نقشه نیمه ساخته شده تقسیم می شوند ( بخش 3.2 ). سپس میتوان یک نقشه راه را از یک نقشه خالی ساخت و با الحاق بخشهای جدید و ادغام بخشهای مشابه در یک نقشه موجود، توسط مثلثسازی محدود Delaunay (CDT) و یک اسکلت اصلاحشده از شبکه مثلثی، مکرراً پالایش کرد (بخش 3.3) .). اطلاعات توپولوژی در این فرآیند زمانی استخراج می شود که مسیر ورودی از قسمتی که قبلاً در نقشه وجود دارد خارج شود یا وارد آن شود ( بخش 3.4 ). این مراحل در شکل 1 نشان داده شده است و به ترتیب در بخش های فرعی زیر توضیح داده شده است. روشهای ارزیابی اعمال شده برای این نتایج نیز در بخش فرعی آخر ارائه شده است.
3.1. پیش پردازش داده ها
سوابق نقطه مسیر GPS شامل فیلدهای زیر است: شناسه تاکسی، مهر زمانی نمونه برداری، سرعت، عنوان و مختصات. سرعتها و سرفصلها از دستگاههای جیپیاس به دست آمدهاند، نه تخمینهای موقتی از مکانها و مهرهای زمانی نقاط همسایه. ردیابی هر تاکسی با پیوند دادن نقاط مسیر از همان خودرو توسط یک خط مستقیم به ترتیب زمانی به دست آمد. با این حال، دو مشکل اجتناب ناپذیر در عمل مشاهده GPS وجود دارد که باید برطرف شود، موقعیت نادرست نقطه مسیر و قطع سیگنال GPS.
نتایج موقعیتیابی نادرست ناشی از بلوکهای بلند، درختان و سایر اشیاء در کنار جادههای شهری (یعنی درههای شهری) به عنوان رانش نقطه مسیر شناخته میشوند. سرعت (سرعت و حرکت) و موقعیت نقاط مسیر قبلی و بعدی را می توان برای پیش بینی موقعیت احتمالی نقطه رانش استفاده کرد [ 23 ]. یک نقطه مسیر باید از نقطه قبلی با در نظر گرفتن سرعت و خطای احتمالی قابل دسترسی باشد و همچنین باید به نقطه بعدی برسد. اگر موقعیت ثبت شده خارج از ناحیه پیش بینی شده باشد، یک نقطه پرت در نظر گرفته می شود و موقعیت آن با یک درونیابی خطی ساده بین نقاط مسیر قبلی و بعدی تصحیح می شود تا از مضرات موقعیت یابی نادرست نقطه مسیر کاسته شود.
مورد دوم قطع سیگنال GPS ممکن است باعث از بین رفتن نقاط مسیر شود، زمانی که وسایل نقلیه در تونل ها یا زیر جاده های مرتفع حرکت می کنند. هنگامی که فاصله بین نقاط مسیر متوالی به طور قابل توجهی بزرگتر از مقدار مورد انتظار باشد، درون یابی ممکن است غیر قابل اعمال باشد. درون یابی بر اساس پیوند مستقیم دو نقطه دور، خطای فاحش را معرفی می کند. با وجود هیچ نقشه مرجع قابل اعتمادی که در طول مرحله ساخت نقشه این مطالعه وجود ندارد، تکنیک های بازیابی ردیابی را نمی توان استفاده کرد. این نوع ردیابی ها معمولاً باید بر اساس فواصل زمانی یا مکانی به دو سفر تقسیم شوند [ 24 ].
پس از پیش پردازش، ردیابی ورودی اکنون شامل نقاط ردیابی GPS تمیز با مهر زمانی و سرعت است. سپس نقاط ردیابی GPS از یک وسیله نقلیه و همان سفر با لبه های مستقیم بر اساس ترتیب زمانی به هم متصل می شوند.
3.2. تقسیم بندی
پس از پیش پردازش، برای هر سفر برای ساخت نقشه و اصلاح بعدی، آثاری به دست آوردیم. قبل از ساختن یا اصلاح نقشه راه، آثار سفرها باید قطعه بندی شوند تا از بخش هایی که با موقعیت واقعی جاده هم تراز نیستند اجتناب شود. بخشهای مشابه از یک سفر طولانی نیز باید برای ادغام بخشبندی شوند تا اینکه بهعنوان تکراری اضافه شوند. بخشهای فرعی برای ادغام باید در یک قسمت منطبق در نقشه نیمه ساخته شده قرار گیرند. بخش های فرعی که هیچ قسمت مشابهی ندارند به نقشه اضافه می شوند.
چندین چارچوب ایجاد شده با استفاده از معیارهای مکانی-زمانی یکنواخت [ 23 ] یا معیارهای غیر یکنواخت [ 25 ] وجود دارد که به مشکل تقسیمبندی ردیابی میپردازد. ما از یک معیار سرفصل نسبتاً ساده مانند چارچوب اول استفاده می کنیم. اگر نقطه آهنگ ورودی دارای عنوان مشابه با نقاط ردیابی موجود در زیربخش فعلی باشد، به زیربخش فعلی اضافه می شود. در غیر این صورت، بخش فرعی فعلی به پایان می رسد و نقطه مسیر ورودی یک زیربخش جدید را شروع می کند ( شکل 2 a). این هنگام حذف بخشهای چرخشی که با خیابانهای واقعی تراز نیستند، مفید است.
پس از این تقسیمبندی مبتنی بر عنوان، برای جلوگیری از تراز نادرست بخشها و بخشهای مشابه در همان سفر، یک بخشبندی بیشتر آنها را برای یک فرآیند همجوشی بعدی آماده میکند. ما طولانی ترین بخش ممکن را که شبیه به بخش های جاده است در نقشه نیمه ساخته شده پیدا می کنیم و بخش فرعی را با توجه به نتایج تطبیق تقسیم می کنیم. شباهت به سادگی با تفاوت جهت گیری و فاصله اقلیدسی به بخش های جاده موجود در نقشه نیمه ساخته شده تعریف می شود.
اگر بخشهایی از ردیابی جدید وجود داشته باشد که دارای یک بخش جاده مشابه باشد، مانند یک نقشه نیمه ساخته شده، در مرحله بعدی که به تفصیل در بخش 3.3 توضیح داده شده است، ادغام میشوند . در غیر این صورت، اگر هیچ قسمتی از ردیابی جدید متقاطع یا مشابه هر بخش در نقشه نیمه ساخته شده وجود نداشته باشد، مستقیماً در نقشه نیمه ساخته شده به عنوان یک بخش منفرد گنجانده می شود. این در شکل 2 به عنوان مثال نشان داده شده استب دو نقطه اول در ردیابی جدید هیچ بخش مشابهی در نقشه نیمه ساخته شده (خطوط جامد) ندارند، در حالی که چهار نقطه آخر در ردیابی جدید همتای مشابهی را در ردیابی موجود پیدا میکنند. به این ترتیب، ردیابی تقسیم می شود و قسمت اول اضافه می شود و قسمت دوم در مرحله بعد ادغام می شود. اگر هر بخش فرعی از ردیابی جدید با بخش های جاده در نقشه ساخته شده تلاقی کند، قبل از ادغام با بخش های جاده مشابه، در تقاطع ها تقسیم می شود. تقاطع ها به نقطه مجموعه برای پردازش مثلث سازی آینده اضافه می شوند.
3.3. ادغام
برای بخشهای منطبق از ردیابی جدید و بخش خیابان موجود در نقشه نیمه ساختهشده، ما یک اسکلت اصلاحشده برای مثلثسازی Delaunay را محاسبه میکنیم که توسط دو بخش جاده با در نظر گرفتن وزنهایشان محدود شده است تا هندسه نقشه راه ساختهشده را به تدریج اصلاح کنیم.
3.3.1. مثلث سازی محدود دلونی دو اثر مشابه
مثلث سازی Delaunay یک مدل پشتیبانی مناسب برای مجاورت فضایی و تجزیه و تحلیل ژئومورفولوژی است. همچنین نتایج رضایتبخشی در کاربردهای تعمیم نقشهکشی، مانند ادغام چند ضلعیهای متعدد، فروپاشی ویژگیهای منطقهای، و تشخیص و جابهجایی تضاد نقشه [ 26 ] ارائه میدهد. در روش مبتنی بر تراکم برای ساخت نقشه از آثار [ 6 ]، نقشههای راه دقیقتری با استفاده از نمودارهای ورونوی خطوط تراکم تولید میشوند. برای ادغام ردیابی های ورودی به تدریج در بخش های مشابه در یک نقشه نیمه ساخته شده، از یک اسکلت وزن مشابه برای ساختن نمایش هندسی متوسط یک شبکه جاده استفاده می شود.
با توجه به همجوشی ردیابی، ما مثلث سازی دلونی را بر اساس محدودیت خطی یک جفت زیربخش ردیابی و بخش های جاده در یک نقشه نیمه ساخته شده اتخاذ می کنیم ( شکل 3 را ببینید ، جایی که خط ضخیم نقشه نیمه ساخته شده قبل از همجوشی و خط نازک است. اثر جدیدی است که باید ادغام شود).
اول از همه، تقاطع آثار شناسایی می شود. در صورت وجود، آثار در تقاطع ها تقسیم می شوند (نقطه خاکستری در شکل 3 ) و تقاطع ها به مجموعه نقاط مثلثی اضافه می شوند. سپس مثلث بندی محدود شده دلونی نقاط مسیر بر اساس معیار مثلث سازی دلونی ساخته می شود (یعنی هیچ نقطه ای در داخل دایره محدود هیچ مثلثی قرار ندارد) [ 27 ].
3.3.2. اسکلت وزنی اصلاح شده
برای ادغام ردیابی جدید در بخش نقشه، اسکلت شبکه مثلثی را استخراج می کنیم. بخش در نقشه نیمه ساخته شده قبلاً برخی از آثار عبوری از نزدیکی را در نظر گرفته است، در حالی که ردی که باید ادغام شود تنها یک مشاهده منفرد از هندسه جاده است. از این رو، آنها باید با وزن های متفاوتی که به رئوس مثلث ها اختصاص داده شده اند، ادغام شوند. نقطه مسیر جدید برابر با 1 وزن می شود و وزن یک نقطه در یک بخش نقشه ساخته شده تعداد ردیابی هایی است که با هم ادغام شده است. سپس، وزن نقاط در بخش جاده ادغام شده را می توان با اضافه کردن وزن ردیابی جدید و بخش جاده در نقشه نیمه ساخته شده بدست آورد. بنابراین، وزن متناسب با تعداد مشاهداتی است که از آن استخراج شده است.
تجزیه و تحلیل رابطه مجاورت مثلث ها برای تعریف اسکلت ضروری است [ 28 ]. در مورد دو چند خط، دو نوع مثلث از نظر تعداد لبه های مجاور وجود دارد (پانل سمت راست در شکل 3 ). یک مثلث نوع I دارای دو یال مجاور با مثلث های دیگر است و اسکلت وزنی آن به عنوان قطعه ای تعریف می شود که دو نقطه تقسیم وزنی لبه های مجاور را به هم متصل می کند. یک مثلث نوع دوم فقط یک یال مجاور با مثلث های دیگر دارد و اسکلت وزنی آن به صورت پاره خط از راس مخالف لبه های مجاور تا نقطه تقسیم وزنی لبه مجاور تعریف می شود. نقطه تقسیم وزنی P ( X P ، Y P) از پاره خط AB با رابطه (1) محاسبه می شود و وزن آن T P به عنوان معادله (2) تعریف می شود، که در آن T A و T B وزن نقاط پایانی پاره A ( X A , Y A ) و B ( X B) را نشان می دهد. ، Y B ).
{ ایکسپ= (ایکسآ×تیآ+ایکسب×تیب) / (تیآ+تیب)Yپ= (Yآ×تیآ+Yب×تیب) / (تیآ+تیب){ ایکسپ=(ایکسآ×تیآ+ایکسب×تیب)/(تیآ+تیب)�پ=(�آ×تیآ+�ب×تیب)/(تیآ+تیب)
تیپ=تیآ+تیبتیپ=تیآ+تیب
در این تعریف اصلی از یک اسکلت، نقاط شروع و پایان نسبت منطبق به طور میانگین محاسبه نمی شود، که با هدف ما برای میانگین گیری تدریجی نمایش خیابان ها موافق نیست. به این ترتیب، اولین و آخرین مثلث های نوع I به گونه ای اداره می شوند که گویی از نوع II هستند، با نقطه پایانی اسکلت آنها به عنوان نقطه تقسیم وزنی نقطه شروع یا پایان نسبت های منطبق تعریف شده است.
بنابراین، اسکلت ها در هر مثلث دلونی یک بخش ذوب شده در نقشه به روز شده را تشکیل می دهند. می توان آن را به عنوان خط قبل از همجوشی، در طول همجوشی ردیابی تکراری بیشتر در نظر گرفت، و با ردیابی های جدید اضافه شده ترکیب شد، بنابراین یک نقشه نیمه ساخته شده را با افزودن همه آثار مشابه در طول فرآیند همجوشی تکراری، اصلاح می کند.
این روش همجوشی ردیابی میانگین یک ردیابی جدید را با قسمتهای مشابه یک نقشه که بر اساس مثلثسازی Delaunay ساخته شده است، میکند. از آنجایی که ردیابی های ورودی برای کاهش عدم قطعیت در حین مشاهده پیش پردازش شده اند، این فرآیند ادغام می تواند نقشه نیمه ساخته شده را به تدریج اصلاح کند تا دقیق و دقیق شود. اگرچه فرآیند همجوشی به پیچیدگی هندسی نمایش شبکه جادهای و متعاقباً به مصرف زمان در فرآیند همجوشی اضافه میکند، این تأثیر برای اصلاح نمایش هندسی ضروری است و در نهایت از نظر هزینه محاسباتی محدود است. در مورد ردیابی با فرکانس پایین، نمایش هندسی یک خیابان سینوسی با ادغام ردهای متعدد اصلاح می شود. با پیچیدگی زمانی O ( nlog n ) برای الگوریتم مثلث بندی محدود دلونی [ 27 ]، پیچیدگی فزاینده هندسه راه تنها باعث افزایش اندکی در مصرف زمان می شود.
3.4. استخراج توپولوژی
در مرحله تقسیمبندی، برخی از بخشهای ردیابی جدید با بخشهای جادهای خاص در یک نقشه نیمه ساخته شده مطابقت داده میشوند، در حالی که بخشهای دیگر ممکن است وارد این قسمتهای همسان شوند یا از آن خارج شوند. تطابق نقطه با شباهت تعیین می شود، با در نظر گرفتن فاصله هندسی و جهت حرکت، همانطور که قبلاً در روش کائو و کروم [ 16 ] استفاده می شد. در این مورد، بخش های درگیر را می توان برای استخراج اطلاعات توپولوژی به سه قسمت تقسیم کرد، یعنی یک قسمت همپوشانی و دو بخش انشعاب، همانطور که در شکل 4 نشان داده شده است . A 1 و A 2 اولین نقاط بی همتا در هر قسمت هستند و به عنوان نقاط انشعاب تعریف می شوند. نقطه انشعاب توپولوژیکیA به عنوان نقطه تقسیم بخش A 1 A 2 به نسبت وزن آنها تعریف می شود. سپس به طور خود به خود، نقطه A به عنوان نقطه توپولوژی به نقشه ساخته شده اضافه می شود. با تأیید اعتبار اتصال در نقطه A ، سپس به نقاط B و C ، نقاط هندسی مجاور در هر یک از جاده های درگیر متصل می شود . این استخراج اطلاعات توپولوژیکی را در این نقطه نهایی می کند.
3.5. ارزیابی
نتایج ساخت نقشه از سه جنبه در این مقاله، بازرسی بصری، دقت موقعیت و صحت توپولوژی مورد ارزیابی قرار گرفت. بازرسی بصری یک مرحله ارزیابی کیفی رایج است، این یک بازرسی از نقشه های ساخته شده و مقایسه با نقشه های برداری ارجاعی زمین-حقیقت یا یک تصویر ارتومی است.
3.5.1. دقت موقعیت
برای ارزیابی کمی دقت موقعیتی، یک معیار عمومی برای ویژگی های خط که توسط گودچایلد و هانتر [ 29 ] پیشنهاد شده بود برای ارزیابی نتایج ساخت نقشه راه استفاده شد. با در نظر گرفتن نقشه برداری استاندارد به عنوان مرجع، این روش نقشه های ساخته شده را روی یک منطقه حائل از شبکه جاده ارجاعی پوشش می دهد و سپس نسبت نقشه های ساخته شده را که در بافر قرار می گیرند استخراج می کند. این روش برای ارزیابی دقت موقعیتی از منظر اطلاعات جغرافیایی بسیار ساده است، اما ممکن است در مورد ارزیابی ساخت نقشه با مشکلاتی مواجه شود که در آن مجموعه دادههای ارزیابی شده ممکن است شامل بخشهایی باشد که نمایش درستی از حقیقت زمین نیستند.
به این ترتیب، روشهای ارزیابی از منظر محاسباتی که مسئله را بهعنوان مقایسه نمودارها رسمیت میدهند، به عنوان معیارهای تکمیلی نیز در نظر گرفته میشوند، از جمله فاصله هاسدورف جهتدار [30]، فاصله مبتنی بر مسیر [ 31 ] و فاصله مبتنی بر کوتاهترین مسیر [ 5 ]. بر اساس بررسی احمد و همکاران. [ 21 ]، ما فاصله هدایت شده هاسدورف را برای تمرکز بر دقت هندسی به جای توپولوژی شبکه انتخاب کردیم که به طور جداگانه ارزیابی خواهد شد.
فاصله هاسدورف جهت دار بین دو مجموعه از نقاط A و B به صورت زیر تعریف می شود:
د→( الف ، ب ) =حداکثرa ∈ Aدقیقهب ∈ بد( الف ، ب )د→(آ،ب)=حداکثرآ∈آدقیقهب∈بد(آ،ب)
جایی که d ( a , b ) فاصله اقلیدسی بین دو نقطه a و b است. به طور شهودی، فاصله هدایت شده هاسدورف به هر نقطه در A نزدیکترین همسایه خود را اختصاص می دهدب ∈ بب∈بو حداکثر فاصله بین نقاط تعیین شده را می گیرد. با این اندازه گیری، فاصله بین هر یال در نقشه ساخته شده و نقشه معیار را کمی می کنیم. آمار توصیفی فاصله نمودار لبه نشان دهنده کیفیت نقشه ها است.
3.5.2. صحت توپولوژیکی
روش پیشنهادی ما همچنین نقاط توپولوژیکی را در طول فرآیند همجوشی ردیابی تشخیص میدهد. از این رو، لازم است صحت توپولوژیکی را جداگانه ارزیابی کنیم. ارزیابی کاملاً ساده است و نقاط توپولوژیکی نقشههای استخراجشده و معیار حقیقت زمین را مقایسه میکند. اگرچه روش های مقایسه شده به طور صریح توپولوژی را بیان نمی کنند، اما می توان از ساختار نمودار استنباط کرد که گره هایی با درجه سه یا بیشتر در واقع یک نقطه توپولوژیکی در نقشه ساخته شده هستند. با این روش می توان دقت و یادآوری این روش ها را ارزیابی کرد.
4. آزمایش و ارزیابی
4.1. آزمایش کنید
آثار GPS مورد استفاده در این آزمایش توسط تاکسیهای شهر ووهان در مارس 2014 جمعآوری شد. ردیابیها در مناطق Qingshan و Zhuankou برای ساخت نقشه استخراج شدند. 139860 و 26334 نقطه GPS در 9089 و 3765 سفر برای هر منطقه جمع آوری شد و میانگین فواصل نمونه برداری به ترتیب 40.8 و 38.2 ثانیه بود. این سفرها شامل رکوردهای 2 تا 386 امتیازی بود. با توجه به ظرفیتها و وضعیتهای ترافیکی مختلف، فواصل بین نقاط متوالی به طور گستردهای متغیر است، با اکثریت از 2.87 متر (صدک 10) تا 552.38 متر (صدک 90) برای منطقه آزمایشی Qingshan، و 1.68 متر تا 509.21 متر برای ژوانکو.
این آزمایش بر روی یک کامپیوتر شخصی، مجهز به پردازنده Intel Core i3 با فرکانس 3.07 گیگاهرتز و 8 گیگابایت حافظه، با روش خودمان در سی شارپ انجام شد. پارامترهای تحمل مورد استفاده در جستجوی بخشهای جادهای مشابه روی 30 درجه در اختلاف سمت و 20 متر در فاصله اقلیدسی تنظیم شدند. به عنوان مقایسه، شبکههای جادهای همان مناطق نیز با روشهای افزایشی دیگر، از جمله شبکههای Cao و Krumm [ 16 ] و احمد و Wenk [ 17] ساخته شدند.]. از پیادهسازی متن باز روشهای مقایسه شده در جاوا و پایتون استفاده شد و پارامترهای سایر روشهای مقایسه شده روی پیشفرض تنظیم شدند. برای همه روشهای آزمایششده، حداقل فاصله زمانی قطع سیگنال در مرحله پیش پردازش روی ۱۸۰ ثانیه تنظیم شد. با توجه به سناریوی رایج شهری که در آن یک خودروی کاوشگر در یک صف در مکانی با سیگنال GPS ضعیف منتظر میماند، منطقی است که خودروی کاوشگر قبل از ترک منطقه چندین دقیقه منتظر بماند. نقاط مسیر متوالی با فواصل بیشتر از این آستانه همانطور که در مرحله پیش پردازش توضیح داده شد تقسیم شدند.
4.2. ارزیابی
یک نقشه برداری استاندارد از شهر به عنوان یک شبکه جاده معیار برای ارزیابی، پس از انتخاب دستی بخشهای جادهای که توسط ردیابی ورودی طی میشوند، در نظر گرفته شد. دقت موقعیتی نقشه برداری 10 متر به عنوان یک نقشه دیجیتال تجاری برای اهداف ناوبری ادعا شده است. از آنجایی که معیار، جادهها را بهعنوان خطوط مرکزی آنها نشان میدهد، در نتایجی که با استفاده از روش ما و روش کائو تولید میشوند، مسیرهای دوگانهای به هم ریخته شد تا آنها را با روشهای ارزیابی، خارج از بازرسی بصری، سازگار کند.
4.2.1. بازرسی بصری
به عنوان یک ارزیابی کیفی از نتایج، نقشه راه تولید شده بر روی تصویری از ناحیه مربوطه، همانطور که در شکل 5 نشان داده شده است، قرار گرفت . با بازرسی بصری مشخص میشود که نقشه راه ساختهشده با روش پیشنهادی، جادههای منطقه آزمایشی را به طور کامل پوشش میدهد و با تصویر ارتو همتراز میشود. با این حال، روشهای مقایسه شده، خروجیهای نامرتب ایجاد کردند، با جادههای غیر موجود در نتایج احمد و نمونههای تکراری از همان بخشهای جاده در نتایج کائو.
پوشش نقشه به دلیل پوشش ردیابی محدود بود. مناطق مسکونی چینی معمولاً به دلایل امنیتی کمتر به روی عموم مردم باز هستند و دارای کنترل دسترسی هستند. به این ترتیب، خیابانهای داخل مناطق مسکونی دارای موتور کمتری هستند و متعاقباً از دادههای ردیابی خودرو غایب هستند.
4.2.2. دقت موقعیت
اندازه گیری های دقت موقعیتی روش های مقایسه شده، از جمله نسبت دقیق برای شعاع های مختلف بافر و آمار برای فواصل هاسدورف، در جدول 1 و جدول 2 فهرست شده است . این جداول نشان میدهد که روش پیشنهادی نتایج بهتری نسبت به سایر روشهای افزایشی ارزیابیشده، از نظر دقت موقعیتی از ردپای وسایل نقلیه با فرکانس پایین، به همراه داشت. روش احمد با توجه به نسبت داخل بافرها بدتر از روش کائو عمل کرد، اما با توجه به فاصله هاسدورف و بازرسی بصری بهتر عمل کرد. این ممکن است به دلیل نمایش های تکراری از خیابان هایی باشد که در نتایج روش کائو ادغام نشده اند.
4.2.3. صحت توپولوژیکی
جدول 3 نتایج ارزیابی نقاط توپولوژیکی را فهرست می کند. روش پیشنهادی در شبکه جادهای معمولی بهتر عمل کرد، اما به شاخههای کوچک با پوشش ردیابی محدود حساس نبود. روش پیشنهادی دقت بالایی با نقاط توپولوژی شناسایی شده داشت، اما به دلیل عدم حساسیت آن نسبت به خیابانهای کمتر پیمودهشده، تمام نقاط توپولوژی زمین-حقیقت را شناسایی نکرد. روش احمد نیز اکثر نقاط توپولوژی را تشخیص داد، اما نقاط توپولوژی بیش از حد در تقاطع ها ادغام نشدند. روش Cao هنگام استخراج توپولوژی در تقاطع ها ضعیف عمل کرد.
4.3. بحث
همانطور که نتایج ارزیابی ما نشان میدهد، روش پیشنهادی به عنوان یک رویکرد افزایشی با گرفتن نقاط مسیر فرکانس پایین به عنوان ورودی و ساخت نقشههای خیابانی با رابطه توپولوژیکی تأیید شد. با این حال، شبکه جادهای برای مناطق انتخابشده در آزمایش حاوی هیچ گونه اتصال پیچیده مانند دوربرگردان یا روگذر با رمپ نیست، که نمیتواند توسط جریان نقطهای با فرکانس پایین ضبط شود. هنگامی که نرخ نمونه به اندازه کافی بالا نیست، این یک چالش بزرگ برای روش های ساخت نقشه افزایشی است.
این آزمایش همچنین کیفیت نقشه ساختهشده را از منظر اطلاعات جغرافیایی، با معیاری مبتنی بر مجموعه نقطهای که از چشمانداز محاسباتی بهعنوان مرجع مشتق شده بود، ارزیابی کرد. به عنوان یک معیار اساسی برای ارزیابی کیفیت رقومی کردن نقشه، به نظر می رسد نسبت نقشه ساخته شده در بافر معیار زمانی که مستقیماً برای ارزیابی نقشه های ساخته شده از ردیابی اعمال می شود، مشکلاتی دارد. بخش های کاملاً نادرست ممکن است به طور غیرمنتظره ای بر اندازه گیری تأثیر بگذارند. از سوی دیگر، ارزیابی توپولوژی با تطبیق تقاطعهای استخراجشده با حقیقت زمین در انتقال جنبه مهمی از کیفیت نقشههای ساختهشده به خوبی عمل کرد. در مقایسه با روشهایی که در منظر محاسباتی استفاده میشوند، مانند روشهای نمونهبرداری مسیر و نمونهبرداری نقطهای در یک تنظیم گراف، ساده و مستقیم است.
5. نتیجه گیری ها
در این مقاله، رویکردی برای همجوشی ردیابی با دقت بالا و ساخت نقشه راه با استفاده از دادههای ردیابی وسیله نقلیه با فرکانس پایین بر اساس مثلثسازی Delaunay و اسکلت وزنی پیشنهاد شدهاست. این روش با استفاده از دادههای GPS تاکسی با فاصله نمونهگیری تقریباً 40 ثانیه در دو منطقه ووهان تأیید و ارزیابی شد. نتایج نشان می دهد که روش پیشنهادی دقت موقعیتی روش های افزایشی موجود را بهبود می بخشد [ 16 ، 17 ] و اطلاعات توپولوژیکی رضایت بخشی را ارائه می دهد. نشان داده شد که برای بهبود کیفیت در موقعیتهای فرکانس پایین هنگام ادغام چندین مشاهدات یک بخش جاده مفید است و ردیابی نزدیک تقاطعها را به روشی امکانپذیر مدیریت میکند.
هنوز مشکلاتی وجود دارد که باید برای بهبود قابلیت استفاده روش پیشنهادی برطرف شود. اول، هندسه اتصالات پیچیده را نمی توان با تقسیم بندی بر اساس معیار عنوان و استخراج توپولوژی، به دلیل محدودیت فرکانس نمونه برداری کم، به دست آورد. الگوریتمهای آنلاین آینده ممکن است راههایی را برای شناسایی و حفظ نقاط مسیر در ناحیه اتصال به جای رها کردن آنها، برای استنتاج هندسه اتصال در نظر بگیرند. دوم، روش پیشنهادی مانند چندین روش موجود، ضمانت صحت ارائه نمی دهد [ 17]. رویههای اسکلتسازی در فرآیند همجوشی را میتوان برای ارائه تضمینهای کیفیت با مفروضاتی در مورد دقت دادههای خام بیشتر تحلیل کرد. سوم، استخراج اسکلت های شبکه مثلثی به طور مداوم پیچیدگی هندسی نقشه ساخته شده را افزایش می دهد. الگوریتمهای سادهسازی برای ویژگیهای خطی، مانند الگوریتم داگلاس-پیکر، ممکن است قبل از کاربرد واقعی آن، با روش پیشنهادی ادغام شوند، جایی که نقشه ساختهشده باید بهاندازه کافی سریع اصلاح شود تا از پیچیده شدن بیش از حد جلوگیری شود.
منابع
- ادلکمپ، اس. Schrödl, S. برنامه ریزی مسیر و استنتاج نقشه با ردیابی موقعیت یابی جهانی. در علوم کامپیوتر از دیدگاه ; Klein, R., Six, H., Wegner, L., Eds. Springer: برلین/هایدلبرگ، آلمان، 2003; صص 128-151. [ Google Scholar ]
- شرودل، اس. واگستاف، ک. راجرز، اس. لنگلی، پی. Wilson, C. استخراج ردیابی GPS برای اصلاح نقشه. حداقل داده بدانید. کشف کنید. 2004 ، 9 ، 59-87. [ Google Scholar ] [ CrossRef ]
- ورال، اس. Nebot، E. فرآیند خودکار برای تولید نقشه های دیجیتالی از طریق فشرده سازی داده های GPS. در مجموعه مقالات کنفرانس استرالیایی در مورد رباتیک و اتوماسیون، بریزبن، استرالیا، 10-12 دسامبر 2007.
- لیو، ایکس. زو، ی. وانگ، ی. فورمن، جی. Ni، LM; نیش، ی. Li, M. شناسایی جاده با استفاده از ردپای خودروهای درشت دانه . گزارش فنی HPL-2012-26; HP Labs: Palo Alto، CA، USA، 2012. [ Google Scholar ]
- کاراگیورگو، اس. Pfoser، D. در مورد ردیابی وسایل نقلیه مبتنی بر داده تولید شبکه جاده ای. در مجموعه مقالات بیستمین کنفرانس بین المللی پیشرفت در سیستم های اطلاعات جغرافیایی، ردوندو بیچ، کالیفرنیا، ایالات متحده آمریکا، 6-9 نوامبر 2012. صص 89-98.
- وانگ، جی. روئی، ایکس. آهنگ، X. تان، ایکس. وانگ، سی. Raghavan, V. رویکردی جدید برای تولید نقشههای جاده قابل مسیریابی از ردیابی GPS خودرو. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 69-91. [ Google Scholar ] [ CrossRef ]
- تانگ، ال. یانگ، ایکس. دونگ، ز. Li, Q. CLRIC: جمع آوری اطلاعات جاده مبتنی بر خط از طریق جمع سپاری. IEEE Trans. هوشمند ترانسپ سیستم 2016 ، 17 ، 2552-2562. [ Google Scholar ] [ CrossRef ]
- تانگ، ال. یانگ، ایکس. کان، ز. لی، کیو. استخراج اطلاعات جاده در سطح خط از مسیرهای GPS وسیله نقلیه بر اساس طبقه بندی بیزی ساده. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 2660-2680. [ Google Scholar ] [ CrossRef ]
- دیویس، جی جی. برسفورد، آر. Hopper، A. مقیاس پذیر، توزیع شده، تولید نقشه بلادرنگ. محاسبات فراگیر IEEE 2006 ، 5 ، 47-54. [ Google Scholar ] [ CrossRef ]
- وو، سی. آیرز، PD; اندرسون، AB تأیید یک روش چند معیاره مبتنی بر GIS برای شناسایی جاده بالقوه. J. Terramech. 2007 ، 44 ، 255-263. [ Google Scholar ] [ CrossRef ]
- ژائو، ی. لیو، جی. چن، آر. لی، جی. زی، سی. نیو، دبلیو. گنگ، دی. Qin, Q. روشی جدید برای به روز رسانی شبکه جاده ها بر اساس داده های شناور خودرو. در مجموعه مقالات سمپوزیوم بین المللی علوم زمین و سنجش از دور IEEE (IGARSS)، ونکوور، BC، کانادا، 24-29 ژوئیه 2011. صفحات 1878-1881.
- بیاجیونی، جی. اریکسون، جی. استنتاج نقشه در مواجهه با نویز و نابرابری. در مجموعه مقالات بیستمین کنفرانس بین المللی پیشرفت در سیستم های اطلاعات جغرافیایی، ردوندو بیچ، کالیفرنیا، ایالات متحده آمریکا، 6-9 نوامبر 2012. صص 79-88.
- راجرز، اس. لنگلی، پی. ویلسون، سی. استخراج داده های GPS برای تقویت مدل های جاده. در مجموعه مقالات پنجمین کنفرانس بین المللی ACM SIGKDD در مورد کشف دانش و داده کاوی، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 15 تا 18 اوت 1999. صص 104-113.
- برونتروپ، آر. ادلکمپ، اس. جبار، اس. تولید نقشه افزایشی با ردیابی GPS. در مجموعه مقالات سیستم های حمل و نقل هوشمند IEEE 2005، وین، اتریش، 16 سپتامبر 2005. [ CrossRef ]
- اکپنیونگ، اف. پالمر-براون، دی. Brimicombe، A. استخراج اطلاعات جاده از داده های GPS ضبط شده با استفاده از شبکه عصبی Snap-drift. محاسبات عصبی 2009 ، 73 ، 24-36. [ Google Scholar ] [ CrossRef ]
- کائو، ال. Krumm, J. از ردیابی GPS تا نقشه راه قابل مسیریابی. در مجموعه مقالات هفدهمین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، سیاتل، WA، ایالات متحده آمریکا، 4-9 نوامبر 2009. صص 3-12.
- احمد، م. Wenk, C. ساخت شبکه های خیابانی از مسیرهای GPS. In Algorithms–ESA 2012 ; Epstein, L., Ferragina, P., Eds. Springer: برلین/هایدلبرگ، آلمان، 2012; صص 60-71. [ Google Scholar ]
- رینوسو، جی اف. آریزا-لوپز، FJ; باررا، دی. گومز-بلانکو، آ. Romero-Zaliz، R. یک روش B-spline برازش برای استخراج یک محور سه بعدی نماینده از مجموعه ای از ردیابی های متعدد جاده. Geocarto Int. 2016 ، 31 ، 832-844. [ Google Scholar ] [ CrossRef ]
- لی، جی. Qin، Q. زی، سی. ژائو، ی. استفاده یکپارچه از روابط مکانی و معنایی برای استخراج شبکههای جادهای از دادههای شناور خودرو. بین المللی J. Appl. زمین Obs. Geoinf. 2012 ، 19 ، 238-247. [ Google Scholar ] [ CrossRef ]
- کیو، جی. وانگ، آر. استنتاج نقشه راه: چارچوب تقسیم بندی و گروه بندی. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 130. [ Google Scholar ] [ CrossRef ]
- احمد، م. کاراگیورگو، اس. Pfoser، D.; Wenk, C. مقایسه و ارزیابی الگوریتمهای ساخت نقشه با استفاده از دادههای ردیابی خودرو. Geoinformatica 2015 ، 19 ، 601-632. [ Google Scholar ] [ CrossRef ]
- قدرت ها، ارزیابی DMW: از دقت، یادآوری و اندازه گیری F تا ROC، آگاهی و همبستگی. جی. ماخ. فرا گرفتن. تکنولوژی 2011 ، 2 ، 37-63. [ Google Scholar ]
- بوچین، م. دریمل، ا. ون کرولد، ام. Sacristán، V. بخشبندی مسیرها: چارچوب و الگوریتمهایی با استفاده از معیارهای مکانی-زمانی. جی. اسپات. Inf. علمی 2011 ، 3 ، 33-63. [ Google Scholar ]
- شوسلر، ن. Axhausen، KW پردازش داده های خام از سیستم های موقعیت یابی جهانی بدون اطلاعات اضافی. ترانسپ Res. ضبط 2009 . [ Google Scholar ] [ CrossRef ]
- آرونوف، بی. دریمل، ا. کرولد، ام وی؛ لوفلر، ام. Staals، F. بخش بندی مسیرها در معیارهای غیر یکنواخت. ACM Trans. الگوریتمها 2015 ، 12 ، 21-26. [ Google Scholar ] [ CrossRef ]
- جونز، CB; باندی، جی ال. تعمیم ور، MJ Map با ساختار داده مثلثی. کارتوگر. Geogr. Inf. سیستم 1995 ، 22 ، 317-331. [ Google Scholar ]
- جویدن، LP مثلث delaunay محدود. الگوریتمیکا 1989 ، 4 ، 97-108. [ Google Scholar ] [ CrossRef ]
- Prasad, L. تجزیه و تحلیل مورفولوژیکی اشکال. CNLS Newsl. 1997 ، 139 ، 1-18. [ Google Scholar ]
- Goodchild، MF; Hunter، GJ یک اندازه گیری دقت موقعیتی ساده برای ویژگی های خطی. بین المللی جی. جئوگر. Inf. علمی 1997 ، 11 ، 299-306. [ Google Scholar ] [ CrossRef ]
- Alt، H.; Guibas، LJ اشکال هندسی گسسته: تطبیق، درونیابی و تقریب. هندب محاسبه کنید. Geom. 1999 ، 1 ، 121-153. [ Google Scholar ]
- احمد، م. Fasy، BT; Hickmann، KS; Wenk, C. فاصله مبتنی بر مسیر برای مقایسه نقشه خیابان. ACM Trans. تف کردن سیستم الگوریتم 2015 ، 1 ، 1-3. [ Google Scholar ] [ CrossRef ]
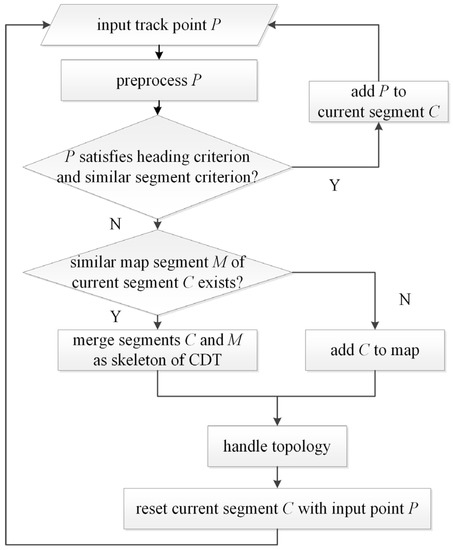
شکل 1. نمودار جریان روش ساخت نقشه راه پیشنهادی. CDT، مثلث سازی دلونی محدود شده است.
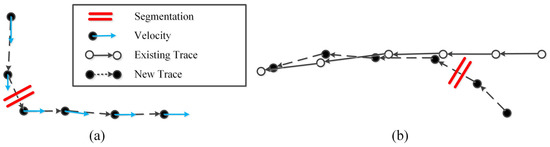
شکل 2. تقسیم بندی ردیابی جدید بر اساس ( الف ) عنوان و ( ب ) شباهت به نقشه موجود.
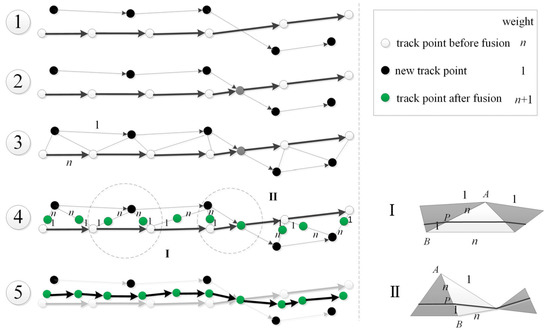
شکل 3. مثلث سازی محدود دلون و ادغام دو اثر مشابه.
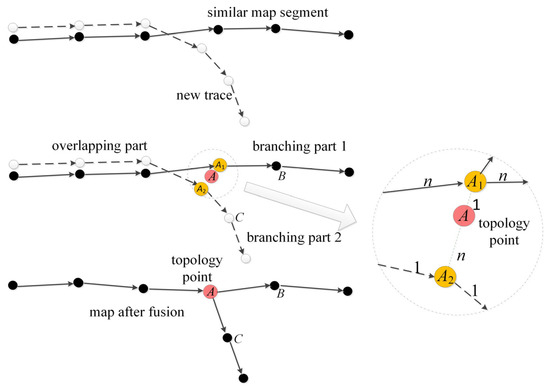
شکل 4. استخراج نقطه توپولوژی از داده های ردیابی.
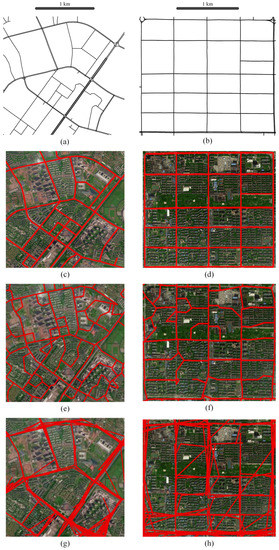
شکل 5. مقایسه نتایج ساخت نقشه راه با معیار و تصوير ارتو. ( الف ) معیار Zhuankou; ( ب ) معیار Qingshan; ( ج ) ژوانکو – پیشنهادی؛ ( د ) Qingshan – پیشنهادی؛ ( ه ) ژوانکو–احمد; ( و ) چینگشان–احمد. ( g ) Zhuankou-Cao; ( ح ) چینگشان-کائو.

جدول 1. نسبت نقشه های ساخته شده در بافرهای مختلف.
جدول 2. ارزیابی اندازه گیری فاصله هاسدورف.
جدول 3. صحت نقطه توپولوژی.
© 2017 توسط نویسندگان. دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC BY) ( http://creativecommons.org/licenses/by/4.0/ ) توزیع شده است.
بدون نظر