


خلاصه
مدلسازی محیط یکپارچه (IEM) ; روش رسمی ؛ معناشناسی عملیاتی ; دیدگاه یکپارچه ؛ ماشین حالت محدود (FSM)
1. معرفی
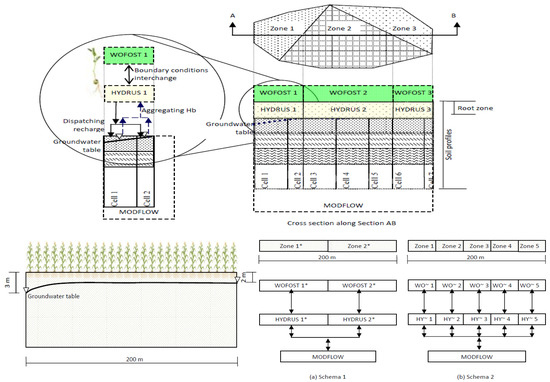
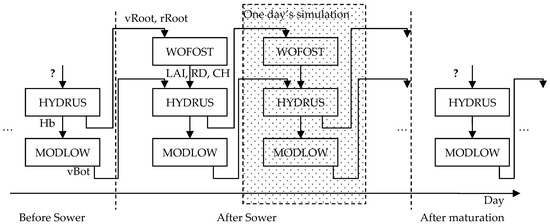
2. مورد استفاده به عنوان نمونه ای از IEM
3. نمای یکپارچه مدل
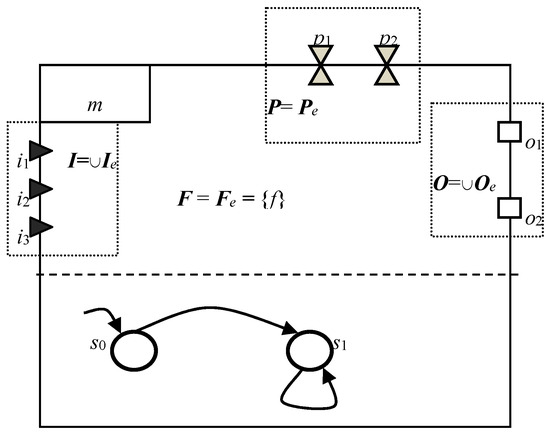
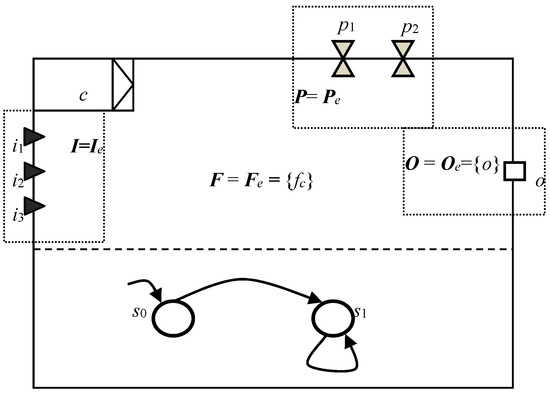
3.1. تعریف رسمی مدل
و
که در آن f e ∈ F ، و
یا
که در آن P e ∈ P , I e ∈ I , O e ∈ O , en `, el `, em `∈ N و el` , em` ≥ 0. P e , I e , O e و f e هستند مجموعه پارامترهای مؤثر، مجموعه متغیرهای ورودی مؤثر، مجموعه متغیرهای خروجی مؤثر و تابع مؤثر در حالت خاص به ترتیب.
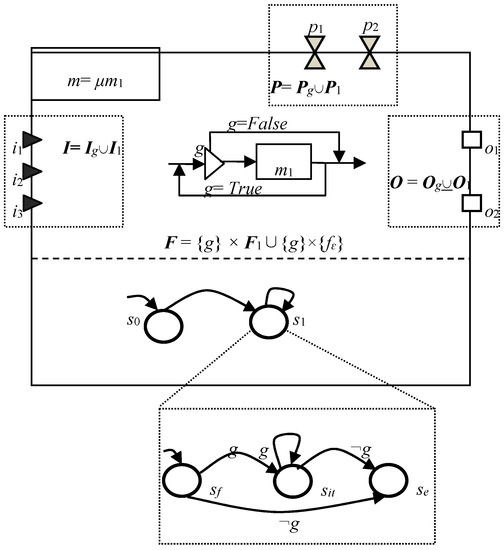
که در آن S مجموعه متناهی از حالات مدل است. T: S → S تابع انتقال حالت است، به این معنی که، در حالی که پارامتر P e و متغیر ورودی I e ارزش گذاری می شوند، مدل به حالت جدیدی منتقل می شود، منطبق با P e و I e ، و f e خواهد بود . شلیک می شود در حالی که O e بدست می آید. در چارچوب، حالت اولیه s 0 = < Ø, Ø, Ø, f Ø > به این معنی است که مدل فعال شده است، جایی که s 0 ∈ Sو f Ø بیانگر این است که هیچ کاری جز انتظار ورودی جدید وجود ندارد.
3.2. جبر برای یکپارچه سازی مدل ها
4. معناشناسی عملیاتی رسمی مدلسازی یکپارچه
4.1. رابط
4.2. معناشناسی برای عملگر جبری
4.2.1. مدل خالی
که در آن P = Ø، I = Ø، O = Ø، F = Ø، A = < S ، s 0 ، T >، S = { s 0 }، و T = Ø.
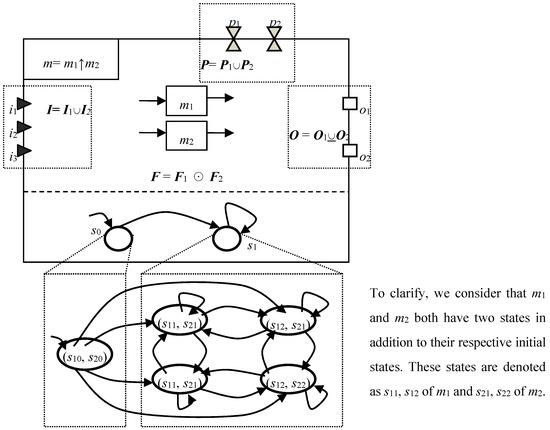
4.2.2. موازی
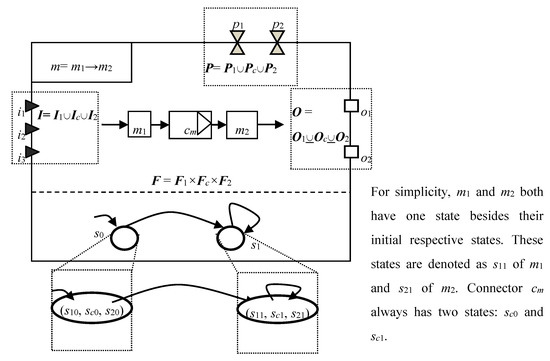
4.2.3. توالی
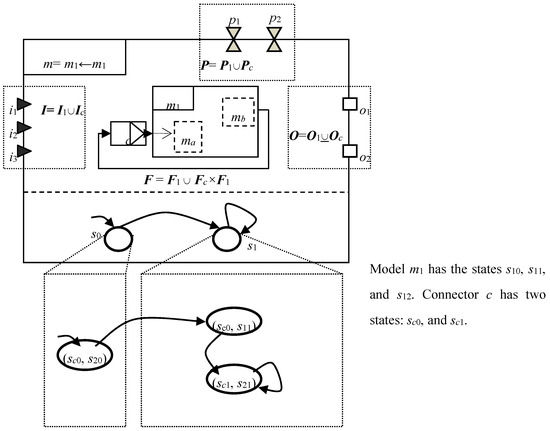
4.2.4. بازخورد
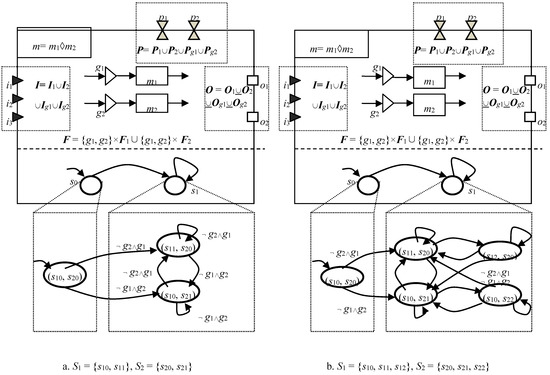
4.2.5. انتخاب کنید
4.2.6. تکرار کنید
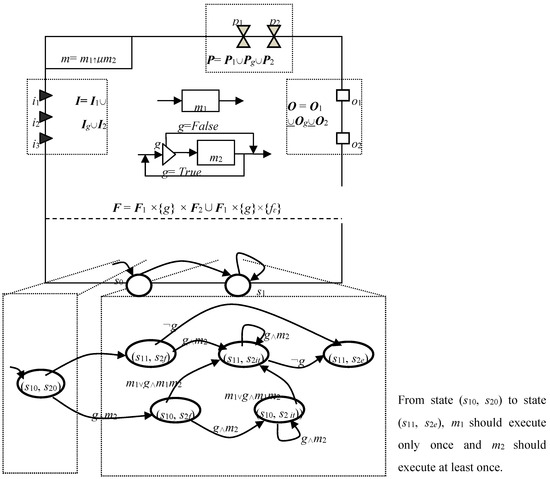
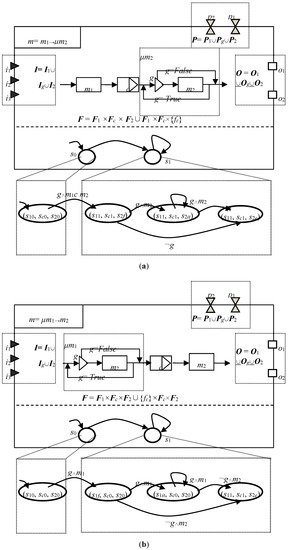
4.2.7. Iterate را با سایر اپراتورها ترکیب کنید
5. مدل مجتمع پیچیده
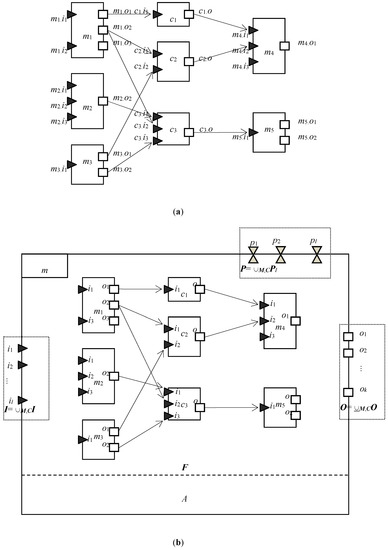
5.1. نمودار مدل
5.2. معناشناسی رسمی نمودار مدل
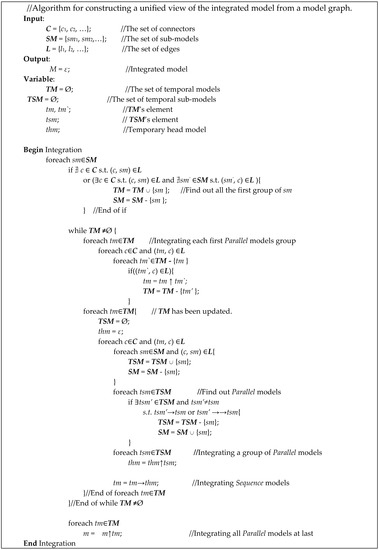
5.3. ساخت مدل مجتمع پیچیده
6. نتایج
7. نتیجه گیری و کار آینده
ضمیمه A. چند قطعه کد با irDSL برای مدل مجتمع در شکل 1 .
منابع
- بیلی، GW; مولکی، لس آنجلس؛ Swank، RR پیامدهای زیست محیطی خاکورزی حفاظتی: یک رویکرد سیستمی. در یک رویکرد سیستمی به خاکورزی حفاظتی ; D’Itri، FM، Ed. Lewis Publishers Inc.: Chelsea, MI, USA, 1985; صص 239-265. [ Google Scholar ]
- کوهن، ی. آلاینده ها در محیط چند رسانه ای . Plenum Press: نیویورک، نیویورک، ایالات متحده آمریکا، 1986. [ Google Scholar ]
- Mackay, D. مدل های محیطی چند رسانه ای: رویکرد فوگاسیتی ; ناشران لوئیس: میشیگان، MI، ایالات متحده آمریکا، 1991. [ Google Scholar ]
- Walters, CJ مدیریت تطبیقی منابع تجدیدپذیر ; شرکت انتشارات مک میلان: نیویورک، نیویورک، ایالات متحده آمریکا، 1986. [ Google Scholar ]
- وینوف، آ. شوگارت، اچ. «اینتگرونسترز»، مدلسازی انتگرال و یکپارچه. محیط زیست مدل. نرم افزار 2013 ، 39 ، 149-158. [ Google Scholar ] [ CrossRef ]
- Laniak، GF; اولچین، جی. گودال، جی. وینوف، آ. هیل، م. گلین، پی. ویلان، جی. گلر، جی. کوین، ن. کور، م. و همکاران مدل سازی محیطی یکپارچه: چشم انداز و نقشه راه برای آینده محیط زیست مدل. نرم افزار 2013 ، 39 ، 3-23. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیوزلی، جی اچ. مارکستروم، اس ال. بروور، ام اس؛ Viger، RJ سیستم مدلسازی مدولار (MMS) – جزء مدلسازی فرآیند فیزیکی یک سیستم پشتیبانی تصمیم مبتنی بر پایگاه داده برای مدیریت آب و برق. آلودگی خاک هوای آب 1996 ، 90 ، 303-311. [ Google Scholar ] [ CrossRef ]
- OpenMI. پروژه OpenMI Open Midel Interface. 2016. در دسترس آنلاین: https://publicwiki.deltares.nl/display /OPENMI/Version+2.0 (در 24 دسامبر 2016 قابل دسترسی است).
- دیوید، او. مارکستروم، اس ال. روجاس، KW; Ahuja، LR; اشنایدر، دبلیو. سیستم مدلسازی شی. در مدل های سیستم کشاورزی در تحقیقات میدانی و انتقال فناوری ; Ahuja, LR, Ma, L., Howell, TA, Eds. ناشران لوئیس: بوکا راتون، فلوریدا، ایالات متحده آمریکا، 2002; صص 317-344. [ Google Scholar ]
- دیوید، او. Ascough, JC, II; لوید، دبلیو. سبز، TR; روجاس، KW; لیوزلی، جی اچ. Ahuja، LR دیدگاه مهندسی نرم افزار در مورد طراحی چارچوب مدل سازی محیطی: سیستم مدل سازی شی. محیط زیست مدل. نرم افزار 2013 ، 39 ، 201-213. [ Google Scholar ] [ CrossRef ]
- هیل، سی. دلوکا، سی. بالاجی، وی. سوارز، ام. دا سیلوا، A. معماری چارچوب مدلسازی سیستم زمین. محاسبه کنید. علمی مهندس 2004 ، 6 ، 18-28. [ Google Scholar ] [ CrossRef ]
- تورمن، دی. کاول، ای جی؛ تایرا، RY; Frodge, J. طراحی یک محیط حل مشکل مشارکتی برای مدلسازی یکپارچه منابع آب. در Brownfields: Multimedia Modeling and Assessment ; ویلان، جی.، اد. WIT Press: ساوتهمپتون، انگلستان، 2004. [ Google Scholar ]
- Aquaveo. راه حل های مدل سازی آب ; Aquaveo: Provo، UT، ایالات متحده آمریکا، 2012; در دسترس آنلاین: http://www.aquaveo.com/ (در 8 دسامبر 2013 قابل دسترسی است).
- Peckham، SD ارزیابی چارچوبهای جفت مدل برای استفاده توسط سیستم مدلسازی دینامیک سطح جامعه (CSDMS). در مجموعه مقالات MODFLOW و بیشتر، گلدن، CO، ایالات متحده آمریکا، 18 مه 2008.
- ون ایترسوم، MK; اورت، اف. هکلی، تی. ویری، جی. اولسون، جی. اندرسن، ای. بزلپکینا، آی. بروور، اف. دوناتلی، م. فلیچمن، جی. و همکاران ارزیابی یکپارچه سیستم های کشاورزی چارچوب مبتنی بر مولفه برای اتحادیه اروپا (SEAMLESS). کشاورزی سیستم 2008 ، 96 ، 150-165. [ Google Scholar ] [ CrossRef ]
- پارکر، دی. منسون، اس. یانسن، ام. هافمن، ام. Deadman، P. سیستم های چند عاملی برای شبیه سازی تغییر کاربری و پوشش زمین: بررسی. ان دانشیار صبح. Geogr. 2003 ، 93 ، 314-337. [ Google Scholar ] [ CrossRef ]
- ژائو، جی. کای، ایکس. Wang, Z. مقایسه سیستمهای تخصیص آب مدیریت شده و مبتنی بر بازار از طریق یک چارچوب مدلسازی مبتنی بر عامل سازگار. جی. محیط زیست. مدیریت 2013 ، 123 ، 120-130. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ژائو، جی. برایان، کارشناسی; کینگ، دی. لو، ز. وانگ، ای. Bende-Michlc، U.; آهنگ، X. Yu, Q. مدلسازی سیستمهای کشاورزی با وضوح بالا و مقیاس بزرگ با استفاده از رویکرد ترکیبی ترکیبی از محاسبات شبکه و پردازش موازی. محیط زیست مدل. نرم افزار 2013 ، 41 ، 231-238. [ Google Scholar ] [ CrossRef ]
- یالو، س. ون گرینزون، ا. ری، ن. کوکوشکیویچ، ال. Betrie, GD محاسبات توزیع شده مدل های SWAT در مقیاس بزرگ در شبکه. محیط زیست مدل. نرم افزار 2013 ، 41 ، 223-230. [ Google Scholar ] [ CrossRef ]
- گرانل، سی. دیاز، ال. Gould، M. برنامه های کاربردی سرویس گرا برای مدل های محیطی: خدمات مکانی قابل استفاده مجدد. محیط زیست مدل. نرم افزار 2010 ، 25 ، 182-198. [ Google Scholar ] [ CrossRef ]
- گودال، جی ال. رابینسون، BF; Castronova، AM مدلسازی سیستمهای منابع آب با استفاده از یک الگوی محاسباتی سرویسگرا. محیط زیست مدل. نرم افزار 2011 ، 26 ، 573-582. [ Google Scholar ] [ CrossRef ]
- باستین، ال. کورنفورد، دی. جونز، آر. Heuvelink، GBM؛ پبسما، ای. استاش، سی. ناتیوی، س. مازتی، پی. ویلیامز، ام. مدیریت عدم قطعیت در مدلسازی محیطی یکپارچه: چارچوب UncertWeb. محیط زیست مدل. نرم افزار 2013 ، 39 ، 116-134. [ Google Scholar ] [ CrossRef ]
- Wing, JM مقدمه ای تعیین کننده به روش های رسمی. کامپیوتر 1990 ، 23 ، 8-24. [ Google Scholar ] [ CrossRef ]
- Argent، RM مروری بر یکپارچه سازی مدل برای برنامه های کاربردی محیطی – مؤلفه ها، چارچوب ها و معناشناسی. محیط زیست مدل. نرم افزار 2004 ، 19 ، 219-234. [ Google Scholar ] [ CrossRef ]
- Argent، RM; وینوف، آ. ماکسول، تی. کادی، اس ام. رحمان، ج.م. سیتون، اس. Vertessy، RA; برادوک، RD مقایسه چارچوبهای مدلسازی: یک رویکرد کارگاهی. محیط زیست مدل. نرم افزار 2006 ، 21 ، 895-910. [ Google Scholar ] [ CrossRef ]
- وینوف، آ. Cerco، C. یکپارچه سازی مدل و نقش داده ها. محیط زیست مدل. نرم افزار 2006 ، 25 ، 965-969. [ Google Scholar ] [ CrossRef ]
- Rizzoli، AE; دوناتلی، م. آتاناسیادیس، IN; ویلا، اف. هوبر، دی. پیوندهای معنایی در چارچوب های مدل سازی یکپارچه. ریاضی. محاسبه کنید. شبیه سازی 2007 ، 78 ، 412-423. [ Google Scholar ] [ CrossRef ]
- اشمیتز، او. کارسبنرگ، دی. دی یونگ، ک. دی کوک، جی.-ال. ساخت مدلهای یکپارچه: زمانبندی برای اجرای اجزای جفت شده. در مجموعه مقالات AGILE 2011، چهاردهمین کنفرانس بین المللی AGILE در علم اطلاعات جغرافیایی، پیشرفت علم اطلاعات جغرافیایی برای جهانی در حال تغییر، اوترخت، هلند، 18 آوریل 2011.
- کرگت، من؛ رابسون، بی جی؛ نقش های Macleod، CJA Modellers در ساختار پروژه های تحقیقاتی یکپارچه. محیط زیست مدل. نرم افزار 2013 ، 39 ، 322-330. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لوید، دبلیو. دیوید، او. Ascough, JC, II; روجاس، KW; کارلسون، جی آر. لیوزلی، جی اچ. کراوس، پی. سبز، TR; آهوجا، تهاجمی چارچوب مدلسازی محیطی LR: تجزیه و تحلیل و پیامدها. محیط زیست مدل. نرم افزار 2011 ، 26 ، 1240-1250. [ Google Scholar ] [ CrossRef ]
- پنیا-هارو، اس. ژو، جی. ژانگ، جی. چن، سی. استافر، اف. Kinzelbach, W. چارچوب چند رویکردی برای جفت کردن مدلهای مستقل برای شبیهسازی تعامل بین رشد محصول و فرآیندهای جریان غیراشباع-اشباع. در مجموعه مقالات انجمن بینالمللی مدلسازی محیطی و نرمافزار (iEMSs) 2012 کنگره بینالمللی مدلسازی و نرمافزار محیطی: مدیریت منابع یک سیاره محدود: مسیرها و چشماندازهای تحت عدم قطعیت، ششمین نشست دوسالانه (iEMSs 2012، 2012، Leipzig)، آلمان ; ص 1224-1231.
- ژانگ، جی. ژو، جی. ژو، Q. چنگ، جی. Li, X. مدلسازی یکپارچه اکو هیدرولوژیکی با ترکیبی از مدل جفت شده و الگوریتم با استفاده از OMS3. در مجموعه مقالات انجمن بینالمللی مدلسازی محیطی و نرمافزار (iEMSs) 2012 کنگره بینالمللی مدلسازی و نرمافزار محیطی: مدیریت منابع یک سیاره محدود: مسیرها و چشماندازهای تحت عدم قطعیت، ششمین نشست دوسالانه (iEMSs 2012، 2012، Leipzig)، آلمان ; ص 1201-1207.
- حمادی، ر. Benatallah, B. یک مدل مبتنی بر شبکه پتری برای ترکیب سرویس وب. در مجموعه مقالات ADC ’03 چهاردهمین کنفرانس پایگاه داده استرالیا از CRPIT، آدلاید، استرالیا، 1 فوریه 2003. جلد 17.
- دومز، سی. باخویا، م. گابر، ج. واک، ام. Lorenz, P. رویکرد مدل محور که از تأیید رسمی برای پروتکل های ترکیب سرویس وب پشتیبانی می کند. J. Netw. محاسبه کنید. Appl. 2013 ، 36 ، 1102-1115. [ Google Scholar ] [ CrossRef ]
- Lomazova، I. شبکه های پتری تودرتو – فرمالیسمی برای تعیین مشخصات و تأیید سیستم های توزیع شده چند عاملی. فاندم Inf. 2000 ، 43 ، 195-214. [ Google Scholar ]
- الور، ر. Yannakakis، M. مدل بررسی ماشین های حالت سلسله مراتبی. در مجموعه مقالات ششم ACM FSE، اورلاندو، FL، ایالات متحده آمریکا، 1 نوامبر 1998.
- Girault، A. لی، بی. لی، EA ماشین های حالت محدود سلسله مراتبی با مدل های همزمان چندگانه. IEEE Trans. Comput.-Aided Design Comput. سیستم مدار. 1999 ، 18 ، 742-760. [ Google Scholar ] [ CrossRef ]
- لی، EA; تریپاکیس، مدلهای S. Modal در بطلمیوس. در مجموعه مقالات سومین کارگاه بین المللی زبان ها و ابزارهای مدل سازی شی گرا مبتنی بر معادله (EOOLT)، اسلو، نروژ، 3 اکتبر 2010; جلد 47، ص 11-21.
- OMS3. وب سایت OMS3 Doc. 2011. در دسترس آنلاین: http://nrrc.ars.usda.gov/ModelFrameworks/ObjectModeling System/Documentation.aspx (در 20 سپتامبر 2016 قابل دسترسی است). [ Google Scholar ]
- ESMF. ESMF کاربر Doc. 2014. در دسترس آنلاین: http://www.earthsystemmodeling.org/esmf_releases/ public/last/ESMF_usrdoc/ESMF_usrdoc.html (دسترسی در 20 ژانویه 2017).
- دوستدار، س. Zdun، U. ادغام مدلهای مبتنی بر الگو و مدلهای SOA مبتنی بر فرآیند. بین المللی اتوبوس جی. یکپارچه سازی فرآیند مدیریت 2006 ، 2 ، 109-119. [ Google Scholar ]


© 2017 توسط نویسندگان. دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC BY) ( http://creativecommons.org/licenses/by/4.0/ ) توزیع شده است.
بدون نظر