

چکیده
در این مقاله، ما خوشههای مکانی-زمانی را با استفاده از دادههای عظیم ماشین شناور از دیدگاه شبکه پیچیده بررسی میکنیم. ما بیش از 85 میلیون نقطه GPS تاکسی (دادههای خودروی شناور) جمعآوریشده در ووهان، هوبی، چین را تجزیه و تحلیل کردیم. نقاط توقف و سرعت کم برای تولید خوشههای مکانی-زمانی انتخاب شدند که نشاندهنده الگوی حرکت معمولی توقف و حرکت در ازدحام ترافیک دنیای واقعی است. ما دریافتیم که اندازههای خوشههای مکانی-زمانی توزیع قانون توان را نشان میدهند. این به معنای وجود یک ویژگی مقیاس پذیر است. یعنی، آنها را می توان به طور طبیعی به یک ساختار سلسله مراتبی قوی تقسیم کرد: موارد با مدت زمان طولانی (درصد پایین) که مقادیر آنها بالاتر از مقدار متوسط است و موارد کوتاه (درصد بالا) که مقادیر آنها در زیر قرار دارد. خوشه های مکانی-زمانی در سطوح مختلف نشان دهنده میزان تراکم ترافیک هستند، برای مثال هر چه سطح بالاتر باشد، تراکم ترافیک بدتر است. علاوه بر این، توزیع تراکم ترافیک از نظر مکانی-زمانی متفاوت بود و یک ساختار چند هستهای را در شبکههای جادهای شهری نشان داد، که نشان میدهد با نظمهای متحرک داخلی متناظر یک سیستم شهری همبستگی وجود دارد.
کلید واژه ها:
خوشه مکانی – زمانی ; داده های شناور خودرو ; مقیاس بندی و الگوهای تحرک شهری
1. مقدمه
داده های جریان ترافیک دنیای واقعی نقش کلیدی در تجزیه و تحلیل سیستم ترافیک دارند و توجه محققان حوزه های مختلف را به خود جلب کرده اند. برای مثال، برخی از مطالعات بر مدلسازی مدلها و تئوریهای ترافیکی از منظر میکروسکوپی و کلان متمرکز بودند (به عنوان مثال، [ 1 ، 2 ، 3 ، 4 ، 5 ، 6 ، 7 ، 8 ])، در حالی که مطالعات دیگر بر روی شهری نظری متمرکز شدند. تجزیه و تحلیل تحرک (به عنوان مثال، [ 9]). با این حال، به دلیل نگرانی های داده ها، بسیاری از مطالعات اولیه به مقیاس های کوچک (مناطق کوچک در یک شهر یا تعداد کمی از اشیاء متحرک) یا سطوح نظری محدود شدند. یعنی چنین مطالعاتی نمی تواند به کل مقیاس شهری برسد و برای تحلیل کلی یک شهر مناسب نیست. با توجه به پیشرفتهای اخیر در فناوری اطلاعات، بهویژه با توسعه و پذیرش گسترده دستگاههای آگاه از موقعیت مکانی مانند GPS و تلفنهای همراه، جمعآوری دادههای شی متحرک به شیوهای انعطافپذیر و مقرونبهصرفه امکانپذیر و آسانتر شده است. در نتیجه، مطالعات زیادی برای به تصویر کشیدن ویژگیهای الگوهای تحرک با استفاده از چنین مجموعههای داده تحرک انجام شده است (به عنوان مثال، [ 10 ، 11 ، 12 ]).
روش مسیر شاید متداول ترین روش مورد استفاده در چارچوب جغرافیای زمانی هاگرستراند [ 4 ] باشد. به عنوان مثال، Spaccapietra و همکاران. [ 11 ] یک مدل مفهومی برای ساختار کل مسیر یک شیء متحرک به واحدهای معنایی قابل شمارش، مانند حرکتها و توقفها، که در آنها میتوان حاشیهنویسی معنایی بیشتری را پیوست کرد، پیشنهاد کرد. بر اساس این مدل مفهومی، بوگورنی و همکاران. [ 10] نقاط GPS را در مکان های مهم جغرافیایی به عنوان توقف جمع آوری کرد و سپس نقاط GPS را بین دو توقف متوالی به عنوان حرکت جمع کرد. در انجام این کار، مسیرهای خام به بخش های معنایی تجزیه می شوند، که بر اساس آن نویسندگان یک زبان پرس و جو داده کاوی را برای استخراج الگوهای معنادار، قابل درک و مفید پیشنهاد کردند. یان و همکاران [ 12] یک مدل ترکیبی و پلت فرم محاسباتی برای استخراج و درک الگوهای فضایی- معنایی کل مسیرها ارائه کرد. اگرچه روش مسیر در برخی جنبه ها موفقیت آمیز است، اما زمانی که نقاط GPS به یکدیگر متصل می شوند تا یک شی مسیر را تشکیل دهند، در اکثر مطالعات موجود، تنها بر زمان شروع و پایان و ویژگی های مکانی مسیر تاکید شده است، در حالی که بعد زمانی در سایر GPS ها مورد تاکید قرار گرفته است. نکات به خوبی در نظر گرفته نشد بنابراین، بعد زمانی تا حدودی نادیده گرفته می شود. بنابراین، این روش برای تحلیلهای خوشهبندی مکانی-زمانی، که به صورت پویا بعد زمانی هر نقطه GPS را در نظر میگیرد نامناسب است [ 6 ].
تحقیقات زیادی به تولید خوشه های مکانی-زمانی اختصاص یافته است. به عنوان مثال، Kalnis و همکاران . [ 6 ] رسماً یک خوشه مکانی-زمانی را به عنوان دنباله ای از خوشه های فضایی که در طول زمان پیوسته و در فضا متوالی هستند (برخی از اجسام متحرک را به اشتراک می گذارد) تعریف کرد. بر اساس این تعریف، نویسندگان سه روش و الگوریتم برای شناسایی خوشههای مکانی-زمانی در مجموعه دادههای تحرک ارائه کردند. هوانگ و همکاران [ 13] ادعا کرد که معنای فیزیکی چنین خوشه های مکانی-زمانی می تواند در مواردی که خوشه های فضایی واقع در نزدیکی شروع و انتهای این خوشه های مکانی-زمانی شامل مجموعه های کاملاً متفاوتی از اشیاء هستند نامشخص باشد. بنابراین، نویسندگان یک تعریف واضح از لحاظ معنایی از خوشههای مکانی-زمانی و همچنین رویکردهای مربوطه برای شناسایی آنها پیشنهاد کردند. به جای ایجاد خوشهها بر اساس فاصله سنتی، نویسندگان [ 14 ] روش بهبود یافتهای را برای تولید خوشههای مکانی-زمانی با گسترش اندازهگیری فاصله تا تابعی از تاریخچه موقعیت اجسام متحرک پیشنهاد کردند. با این حال، این مطالعات در کاربردهای خاص روششناسیشان محدود هستند و سعی در تحلیل تحرک شهری ندارند.
مطالعاتی که سعی در تجزیه و تحلیل خوشههای مکانی-زمانی و الگوهای تحرک شهری با استفاده از مجموعه دادههای تحرک دارند، برجستهتر میشوند. به عنوان مثال، کائو و همکاران. [ 15 ] مشکل استخراج الگوهای تناوبی را تعریف کرد و الگوریتم های مربوطه را برای بازیابی الگوهای تناوبی در مجموعه داده های تحرک پیشنهاد کرد. بذانی و همکاران [ 16 ] موضوع تحرک شهری را با آزمایش توزیع احتمال طول مسیر، زمان توقف فعالیت و درجه تحرک مجموعه داده در منطقه شهری فلورانس تحلیل کرد. مطالعه آنها به ظهور قوانین آماری قوی پی برد. هوک و همکاران [ 17] الگوهای تحرک تاکسی را با تجزیه و تحلیل برخی از ویژگیهای دادههای جیپیاس تاکسی زرد در منطقه سانفرانسیسکو، مانند مشخصات سرعت آنی، توزیع مکانی-زمانی، خوشهبندی و نقاط داغ بررسی کرد. با این حال، تجزیه و تحلیل سرعت آنی بر اساس یک تاکسی منفرد است و نمی تواند روند کلی ترافیک را منعکس کند. علاوه بر این، خوشهها زمانی-مکانی نبودند، زیرا نقاط اتصال بیسیم بین تاکسیهای سیار، مکانهای وانت و تحویل بودند.
اگرچه برخی از مطالعات ذکر شده قبلی در تجزیه و تحلیل الگوهای تحرک ترافیک دخیل بودند، روش خوشه بندی مکانی-زمانی به ندرت به کار گرفته شد، به ویژه از دیدگاه تراکم ترافیک و قانون مقیاس بندی. علاوه بر این، اندازه مجموعه دادههای تحرک جمعآوریشده محدود است و تاکسیها همیشه در مکانهای ترجیحی منتظر تماسهای تلفنی مشتریان میمانند. در این مقاله، ما از مجموعه داده های تحرک فشرده استفاده می کنیم که شامل بیش از 85 میلیون نقطه GPS تاکسی است. این داده ها از بیش از 11 هزار تاکسی طی شش روز در شهر ووهان، هوبی، چین جمع آوری شده است. تاکسی ها به طور مداوم 24 ساعت در روز (با تغییر شیفت رانندگان) در جاده ها رانندگی می کنند تا سود را برای شرکت به حداکثر برسانند. بدین ترتیب، مجموعه داده های تحرک مورد استفاده در این مطالعه حسگرهای بسیار قابل اعتمادی برای رفتار ترافیکی هستند و از نظر تحلیل تحرک نسبت به داده های استفاده شده قبلی منحصر به فردتر هستند. ما الگوی سرعت کلی همه تاکسیها را تجزیه و تحلیل کردیم و نقاط GPS تاکسی با سرعت پایین و توقف را برای ایجاد خوشههای مکانی-زمانی انتخاب کردیم. این نشان دهنده الگوی حرکت توقف و حرکت در ازدحام ترافیک در دنیای واقعی بود. این خوشههای مکانی-زمانی برای نشان دادن خاصیت مقیاسپذیری پیدا شد. این بدان معناست که رفتار ترافیک یک سیستم پیچیده خود سازمان یافته است ([ این خوشههای مکانی-زمانی برای نشان دادن خاصیت مقیاسپذیری پیدا شد. این بدان معناست که رفتار ترافیک یک سیستم پیچیده خود سازمان یافته است ([ این خوشههای مکانی-زمانی برای نشان دادن خاصیت مقیاسپذیری پیدا شد. این بدان معناست که رفتار ترافیک یک سیستم پیچیده خود سازمان یافته است ([18 ، 19 ، 20 ])، که در آن الگوهای تحرک پیچیده جهانی از پایین در سطح وسایل نقلیه مشتق شده است. خوشه های مکانی-زمانی در سلسله مراتب مقیاس بندی میزان تراکم ترافیک را نشان می دهد. با ترکیب قانون مقیاسبندی و خوشههای مکانی-زمانی، الگوهای تحرک ترافیک را به صورت کمی تحلیل کردیم.
بقیه مقاله به شرح زیر سازماندهی شده است: در بخش 2 ، داده های شناور خودرو توصیف شده و مدل داده های مفهومی ارائه شده است. سپس تجزیه و تحلیل و حذف خطای GPS را انجام می دهیم. در بخش 3 ، الگوهای زمانی دادههای خودروی شناور تحلیل میشوند و سپس نقاط GPS تاکسی کمسرعت برای تولید خوشههای مکانی-زمانی از هم جدا میشوند. بخش 4 روش شناسی نحوه اندازه گیری میزان تراکم ترافیک را از خوشه های مکانی-زمانی ارائه می دهد. در بخش 5 ، مدل بر روی داده های واقعی اعمال می شود و پس از آن بحثی در مورد نتایج ارائه می شود. در نهایت، بخش 6 نتیجه گیری مقاله را ارائه می دهد و به کارهای آینده اشاره می کند.
2. اطلاعات خودرو شناور
مجموعه داده های تحرک دنیای واقعی نقش کلیدی در این تحقیق ایفا می کنند. دادههای اولیه خودروهای شناور از بیش از 11 هزار تاکسی در ووهان، هوبی، چین، در فواصل منظم (متوسط 20 تا 60 ثانیه) در طول دورههای شش روزه جمعآوری شد ( ر.ک ، [ 21 ).] برای جزئیات بیشتر). در مجموع بیش از 85 میلیون رکورد (بیش از 14 میلیون در روز) با ویژگی های مهر زمانی، شناسه خودرو، x، y، سرعت و زاویه وجود دارد. با توجه به توضیحات مجموعه داده تحرک اصلی، سرعت، سرعت لحظه ای تاکسی است که توسط دستگاه مجهز به تاکسی ثبت شده است. زاویه زاویه آزیموت تاکسی است و در این مقاله از آن استفاده نشده است. از آنجایی که حرکت انسان در سطح شهر توسط شبکههای جادهای محدود میشود، فضای آزاد شهری در سطح شهر به فضایی اطلاق میشود که توسط شبکههای جادهای متصل شده و خودروها به آن میرسند. از آنجایی که تمام تاکسی ها به طور مداوم در حال حرکت هستند، از هر بخش جاده ای در شبکه جاده عبور می شود. بدین ترتیب کل فضای آزاد شهری در نهایت تحت پوشش تردد تاکسی ها قرار می گیرد.
2.1. مدل های داده
دادههای اصلی خودروی شناور در فایلهای متنی خود تعریف شده ذخیره میشوند. بر اساس شناسه خودرو و مهر زمانی، فیلتر کردن ترتیب رکوردها برای هر تاکسی ساده است. نقاط GPS به طور دقیق بر اساس مهر زمانی مرتب شده و از اولین رکورد یک به یک به هم متصل می شوند. توالی سوابق مرتب شده و متصل (نقاط GPS) برای یک تاکسی موقعیت های در حال تحول را در زمان و مکان نشان می دهد و به عنوان مسیر یا مسیر مکانی-زمانی نامیده می شود. یک مسیر مکانی-زمانی بر اساس یک برش از مسیر تاکسی واقعی در شکل 1 نشان داده شده است.. نقاط سبز و قرمز نقاط GPS تاکسی هستند که سرعت آنی آنها به ترتیب بزرگتر و مساوی صفر است. بر این اساس، سه خط سبز و سه خط قرمز به ترتیب حرکت ها و توقف های انباشته/ معنایی را نشان می دهند. به خاطر جلوه های بصری بصری، آنها به عنوان خطوط قطعه ساده شده اند.
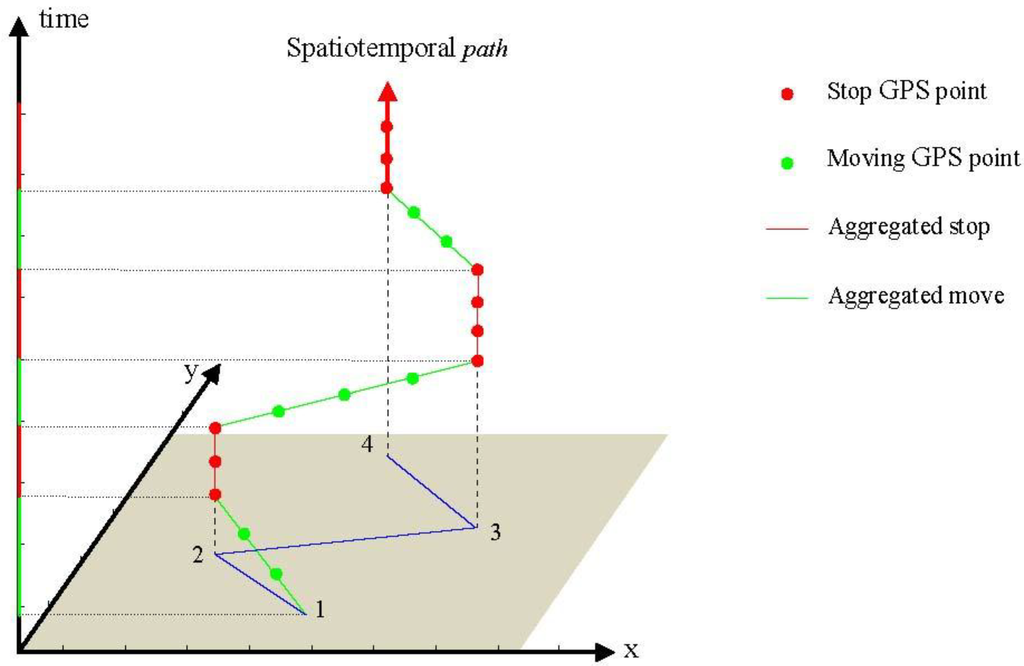
شکل 1. مدل داده نمایش یک مسیر مکانی- زمانی تاکسی.
بدیهی است که هر توقف یا حرکت انباشته دارای طول عمر با دو برچسب زمانی (زمان شروع و زمان پایان) است که از نظر زمانی در طول کل مسیر مکانی-زمانی پیوسته هستند ( شکل 1 ). برای نقاط توقف تک یا متحرک GPS، نقاط زیادی از داده های شناور خودرو در هر برش زمانی از روز وجود دارد که می تواند در عکس های فوری ارائه شود. شکل 2 پنج عکس فوری را نشان می دهد، که در آن نقاط سیاه نشان دهنده نقاط GPS هستند.
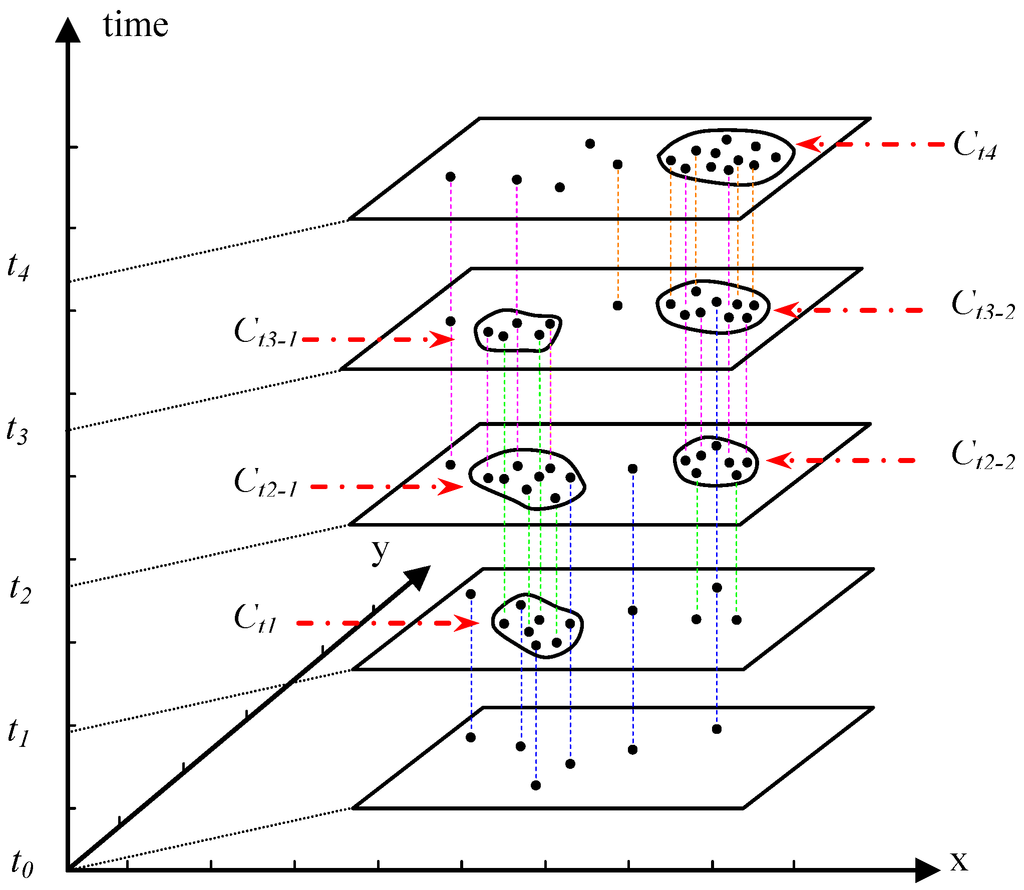
شکل 2. فرآیند نمادی خوشه بندی مکانی-زمانی (توجه: آبی، سبز، صورتی و نارنجی نشان دهنده طول عمر متفاوت توقف ها هستند که به ترتیب از t 0 ، t 1 ، t 2 و t 3 شروع می شوند).
درک خوشه های فضایی نقاط هندسی ایستا [ 22 ] آسان است: با توجه به فاصله/شعاع تعیین شده، فرد از هر نقطه هندسی شروع می کند و به جستجوی همسایگان در دوردست ادامه می دهد تا زمانی که هیچ همسایه ای باقی نماند. به این ترتیب، یک سری از نقاط گروه بندی شده، یعنی یک خوشه فضایی به دست می آوریم . با اعمال این الگوریتم خوشه بر روی نقاط GPS در هر عکس فوری، میتوانیم شش خوشه فضایی را در خطوط زمانی t 1 ، t 2 ، t 3 و t 4 ( شکل 2 ) در سمت چپ و راست بدست آوریم. این خوشه های فضایی Ct1 ، C هستندt2-1 ، C t2-2 ، C t3-1 ، C t3-2 و C t4 ، که در آن C نشان دهنده خوشه و زیرنویس l و r به ترتیب نشان دهنده خوشه ها در سمت چپ و راست است. بدیهی است که خوشه های [ Ct1 ، Ct2-1 ، Ct2-2 ] و [ Ct3-1 ، Ct3-2 ، Ct4] نه تنها در طول زمان پیوسته هستند بلکه در فضا همپوشانی دارند. مرزهای خوشه های فضایی را می توان با استفاده از روش بدنه محدب تعریف کرد. به این دسته از خوشه ها، خوشه های مکانی-زمانی می گویند. اگر مرزهای خوشه های مکانی-زمانی را به هم وصل کنیم، شبیه اعوجاج سیلندرهای سه بعدی است. تکامل خوشه مکانی-زمانی را می توان بر اساس یک مدل داده درخت مانند ساده ردیابی کرد، که در آن ریشه خوشه مکانی-زمانی و برگ ها خوشه های مکانی مرتب شده هستند.
2.2. تجزیه و تحلیل و حذف خطای GPS
دادههای ایدهآل خودرو شناور باید از نظر فواصل زمانی بین هر جفت نقطه GPS ممتد پیوسته باشد و مختصات هر نقطه GPS باید در مقایسه با موقعیت واقعی تاکسی دقیق باشد. با این حال، خطاهای GPS ناشی از مسدود شدن سیگنال GPS یا اشکالات سخت افزاری/نرم افزاری در طول فرآیند جمع آوری داده ها وجود دارد. برای رفع این گونه خطاها اقدامات زیر انجام شد.
نقاط GPS برای اولین بار فیلتر شدند که بسیار دور از جعبه مرزی منطقه مورد مطالعه (ووهان، چین) منحرف می شوند. چنین نقاط خطای پرت هستند و در مجموع 66658 مورد (0.078 درصد از کل) وجود دارد. چنین خطاهایی می تواند هم به دلیل انسداد سیگنال GPS و هم اشکالات سخت افزاری/نرم افزاری باشد. سپس نقاط GPS با سرعت بیشتر از حد تعیین شده (مانند 150 کیلومتر در ساعت) حذف شدند که مشخصاً خطا هستند. تنها 4174 رکورد (0.005٪ از کل) در شش روز به سرعت بالا نسبت داده شد. اگرچه درصد چنین خطاهای مرتبط با نقاط GPS با انتخاب یک محدودیت سرعت متفاوت متفاوت است، این تغییر آنقدر کوچک است که انتظار می رود به طور قابل توجهی بر تجزیه و تحلیل کلی تأثیر بگذارد.
فاصله زمانی نمونه برداری برای داده های خودروی شناور به طور متوسط 20 تا 60 ثانیه است. اگر فاصله زمانی بین دو نقطه متوالی GPS بیشتر از 60 ثانیه باشد، ممکن است به دلیل از بین رفتن یا تأخیر سیگنال GPS یا خاموش کردن دستگاه GPS یا تاکسی توسط راننده باشد. اگر فاصله زمانی بین دو نقطه متوالی GPS خیلی طولانی باشد (به عنوان مثال، بیشتر از آستانه زمانی است)، پس نمی توان حرکت تاکسی را در این بازه زمانی مشخص کرد. بنابراین، مسیر باید به قسمت های مختلف در چنین نقاط GPS تقسیم شود. برای اینکه تصمیم بگیریم چه مقادیری را برای چنین آستانههایی انتخاب کنیم، تمام فواصل زمانی و فواصل هندسی بین تمام جفتهای دو نقطه GPS متوالی در مسیر تاکسیها را محاسبه کردیم. مقدار میانگین تمام بازه های زمانی 65 ثانیه است. مشخص شد که درصد بازه های زمانی کمتر از 60، 120، 180 و 240 ثانیه ( یعنی1، 2، 3 و 4 دقیقه) به ترتیب 82.2، 95.8، 97.8 و 98.4 درصد بود. به طور مشابه، مقدار میانگین تمام فواصل هندسی 308 متر و درصد فواصل هندسی کمتر از 300، 500، 800 و 1000 متر به ترتیب 50.0، 85.0، 98.6 درصد و 99.6 درصد بوده است. بدیهی است که درصدهای اطراف آستانه 4 دقیقه و 1 کیلومتر بسیار پایدار و اکثریت مطلق هستند ( شکل 3 ).
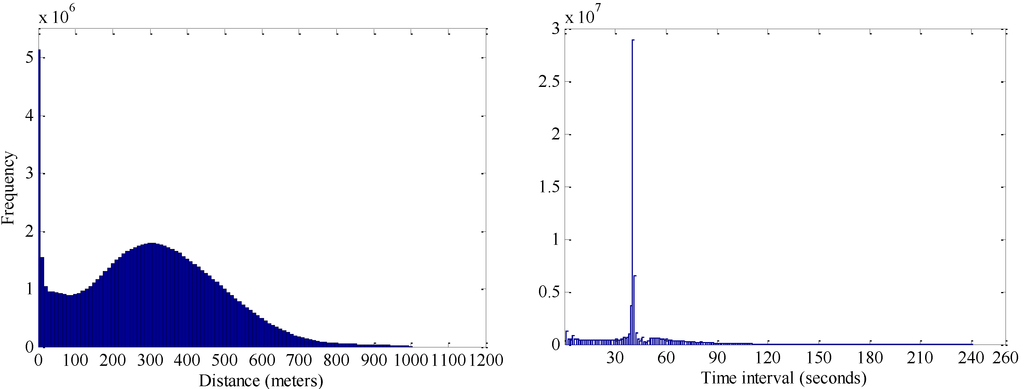
شکل 3. هیستوگرام فواصل ( پانل سمت چپ ) و فواصل زمانی ( پانل سمت راست ) همه جفت نقاط متوالی GPS کمتر از آستانه.
با توجه به تجزیه و تحلیل فوق، ما یک استاندارد تنظیم کردیم و یک برنامه ساده برای حذف چنین خطاهایی ایجاد کردیم. به عنوان مثال، اگر فاصله زمانی و فاصله هندسی بین دو نقطه GPS متوالی به ترتیب بیشتر از 4 متر و 1 کیلومتر باشد، به این معنی است که سیگنال GPS در این بازه زمانی ناپیوسته بوده است. اگر چنین بود، پس مسیر به قسمت های مختلف تقسیم می شد، زیرا حرکت تاکسی در این دوره زمانی ناشناخته بود. بالعکس ، اگر هر دو فاصله زمانی و فاصله هندسی کمتر از آستانه خود باشند، آنگاه نقاط پیوسته در طول زمان و مکان در نظر گرفته می شوند. با انجام این کار، خطاهای موجود در داده های مراقبت شناور را می توان به طور موثر و موثر کاهش داد.
3. الگوهای زمانی داده های شناور خودرو
بر اساس مدلهای داده در بخش قبل، توسعه روشی برای تولید خوشههای مکانی-زمانی ساده بود. همانطور که قبلاً ذکر شد، نقاط GPS تاکسی با سرعت کم و توقف برای تولید خوشههای مکانی-زمانی انتخاب شدند که الگوی حرکت توقف و حرکت را نشان میدهند و برای شناسایی ناهنجاریهای ترافیکی مناسب هستند. در این مقاله، ناهنجاری های ترافیکی به طور خاص به تراکم های ترافیکی شناسایی شده بر اساس ویژگی مقیاس پذیری خوشه های مکانی-زمانی در یک سیستم ترافیکی در محیط شهری اشاره دارد. اولین سوال این است که چگونه می توان نقاط کم سرعت و توقف GPS را انتخاب کرد. برای نقاط توقف GPS، نقاط GPS که سرعت آنها برابر با صفر بود انتخاب شدند. برای تفکیک نقاط سرعت پایین برای سایر نقاط متحرک GPS، میانگین سرعت تاکسی ها بر اساس زمان روز رسم شد.شکل 4 ). الگویی با دو دره کشف شد: در طول روزهای هفته (در پانل سمت چپ شکل 4 )، نمودارها دو ساعت شلوغی را نشان میدهند: 7:00-9:00 صبح و 5:00-7:00 بعد از ظهر. در حالی که در تعطیلات آخر هفته (در پانل سمت راست شکل 4 )، ساعات شلوغی 10:00-12:00 صبح و 2:00-4:00 بعد از ظهر بود. میانگین سرعت در ساعات شلوغی حدود 20 کیلومتر در ساعت بود که بسیار کمتر از ساعات غیر شلوغی است. بنابراین نقاط کم سرعت GPS کمتر از 20 کیلومتر بر ساعت تعیین شد.
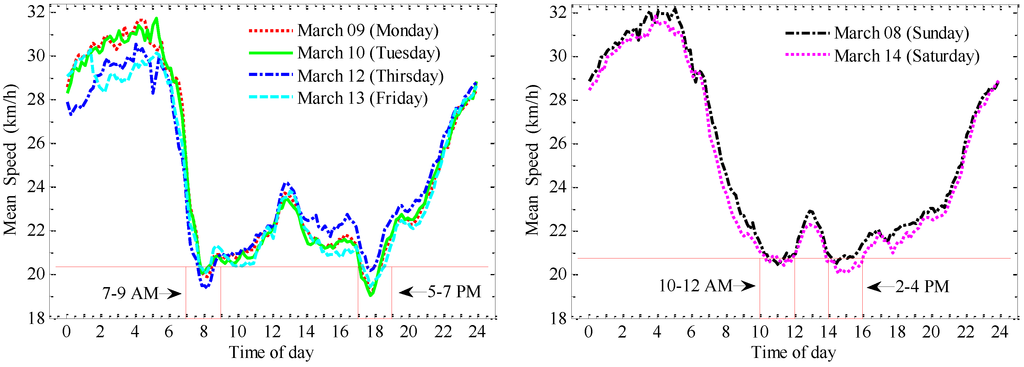
شکل 4. میانگین سرعت تاکسی ها در روزهای کاری ( پانل سمت چپ ) و آخر هفته ها ( پانل سمت راست ).
از شکل 4 می بینیم که روزهای هفته و آخر هفته دو الگوی نماینده معمولی را ارائه می دهند. علاوه بر این، تاکسی ها در منطقه مورد مطالعه (ووهان، چین) به طور مداوم برای پیکاپ های بیشتر به حداکثر سود هدایت می شوند. بنابراین، تعداد خالص تاکسی های ایست، در حال حرکت و کل تاکسی ها با سرعت های مختلف به سختی از ساعت 7 صبح تا 7 بعد از ظهر در طول روز متغیر است و حرکت تاکسی ها کل فضای شهری را پوشش می دهد. برعکس در بسیاری از مناطق دیگر (مثلاً برخی از کشورهای اروپایی)، تاکسیها همیشه در مکانهای ترجیحی منتظر تماسهای تلفنی مشتریان میمانند.
4. ساختارهای سلسله مراتبی جغرافیایی و پیامدهای آنها
در این بخش، به طور خلاصه مفاهیم و روابط بین توزیعهای دم سنگین، ویژگیهای مقیاسبندی و ساختارهای سلسله مراتبی جغرافیایی را با تمرکز ویژه بر نحوه استفاده از آنها در این تحقیق معرفی میکنیم. در این مقاله، توزیعهای دم سنگین به برخی روابط غیرخطی ویژه بین یک کمیت و احتمال آن محدود میشوند که میتوان آن را به عنوان قانون توان، لگ نرمال، نمایی، قانون توان با قطع نمایی و نمایی کشیده توصیف کرد [ 23 ]. در اصل، معنای فیزیکی پشت توزیع دم سنگین این است که اشیاء با اندازه کوچک بسیار رایج هستند، در حالی که چیزهایی با اندازه های بزرگ بسیار نادر هستند [ 24 ]]. اندازه ها به معنای ویژگی های کمی اشیاء در یک پدیده مقیاس بندی هستند. مثلاً بزرگی زمین لرزه ها. اجسام بزرگ و کوچک به ترتیب نشان دهنده گروه های مختلف در سر و دم هستند. همانطور که آدامیک [ 25 ] اشاره کرد، ویژگی مشترک توزیع های دم سنگین، تقسیم اشیاء به گروه ها را توصیف می کند، که ساختار سلسله مراتبی را از دیدگاه آماری نشان می دهد.
به طور خاص، جیانگ و لیو [ 26 ] پیشنهاد کردند که در محیط شهری، اگر تمام مقادیر اشیاء جغرافیایی اندازهگیریشده از یک توزیع سنگین پیروی کنند، «میانگین (m) مقادیر میتواند همه مقادیر را به دو بخش تقسیم کند: درصد بالایی در دم و درصد پایینی در سر». نظم به عنوان قانون تقسیم سر / دم نامیده می شود. بر اساس این قاعده، ساختار سلسله مراتبی دو لایه (سر و دم) اشیاء (یا بازنمایی) جغرافیایی را می توان به طور عینی و طبیعی به صورت تکراری به دست آورد ( شکل 5 ). ساختارهای سلسله مراتبی دو لایه به دست آمده ( شکل 5 ) می تواند مفاهیم جغرافیایی را در زمینه های مختلف محیطی شهری نشان دهد. به عنوان مثال، لیو و جیانگ [ 27]، دریافتند که مساحت و خطوط آویزان بلوک ها (ساختار سلولی) شبکه های جاده ای در یک شهر از توزیع دم سنگین پیروی می کنند و بنابراین می توان آنها را به ساختارهای سلسله مراتبی دو لایه در سطوح مختلف گروه بندی کرد. هرچه مساحت و خطوط آویزان بلوک بیشتر باشد، تراکم کمتر و حمل و نقل نامناسب تر خواهد بود، که به معنای گسترش شهری در حال وقوع است. با انجام این کار، محل لکه های پراکنده شهری (بلوک ها) و سطح درجه پراکندگی شناسایی شد.
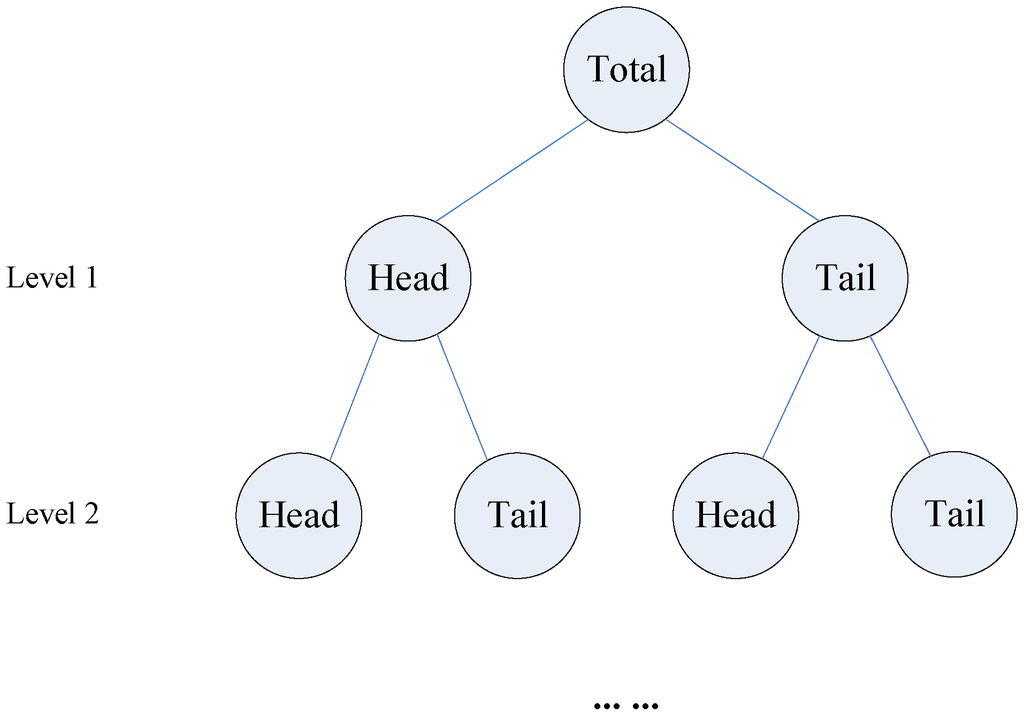
شکل 5. ساختار سلسله مراتبی دو لایه در توزیع های دم سنگین.
در این مقاله، خوشههای مکانی-زمانی به عنوان نمایشهای جغرافیایی برای نمایش تراکم ترافیک در دنیای واقعی تولید شدند. مشخص شد که ویژگیهای خوشههای مکانی-زمانی از توزیع قانون توان پیروی میکنند (برای جزئیات بیشتر، لطفاً به وسط بخش بعدی مراجعه کنید)، که نشاندهنده وجود مقیاسگذاری از دیدگاه فیزیک آماری است [ 23 ]. بنابراین، ما میتوانیم سلسله مراتب خوشههای مکانی-زمانی را به دست آوریم و آنها را به زیرساختهای شهری مانند شبکههای جادهای مرتبط کنیم تا پیامدهای اساسی را برای تجزیه و تحلیل بیشتر در بخش بعدی بررسی کنیم.
5. نتایج و بحث
میانگین سرعت تمامی نقاط GPS و همچنین درصد تاکسی ها با سرعت های مختلف برای شش روز، در روز محاسبه شد. میانگین سرعت (در پانل سمت چپ شکل 6 ) نشاندهنده مقدار میانگین تمام نقاط سرعت GPS در هر روز است، جایی که نقاط آخر هفته بالاتر از روزهای کاری هستند. این می تواند بازتابی از نحوه شلوغی ترافیک باشد. همچنین بین دوشنبه و جمعه روند نزولی وجود دارد. ما حدس می زنیم که ریتم زندگی شهری را منعکس می کند: ازدحام ترافیک در جمعه ها معمولاً بیشتر از دوشنبه ها است. با این حال، درصد تاکسی ها با سرعت های مختلف در طول روزهای هفته (در پانل سمت راست شکل 6)) و آخر هفته ها بسیار شبیه و پایدار هستند و روند مشخصی ندارند. نقاط GPS کم سرعت (سرعت کمتر از 20 کیلومتر در ساعت) حدود 16 درصد از کل داده ها را اشغال کردند.

شکل 6. میانگین سرعت و میانگین درصد تاکسی ها در سرعت های مختلف.
همانطور که در بخش 2 تجزیه و تحلیل شد ، سرعت 20 کیلومتر در ساعت به عنوان سرعت آستانه برای جدا کردن نقاط GPS با سرعت پایین از نقاط با سرعت معمولی استفاده شد. قابل توجه است، از نظر قابلیت انتقال، انتظار نمی رود سرعت آستانه جهانی باشد. در عوض، این بستگی به نتیجه به دست آمده از طریق رویکرد بالا اعمال شده به مجموعه داده های تحرک مربوطه در محیط های مختلف شهری دارد. این نقاط GPS کم سرعت به سادگی از نقاط GPS که سرعت آنها کمتر از 20 کیلومتر در ساعت است انتخاب نمی شوند. همانطور که در شکل 1 نشان داده شده است، نقاط تک GPS را می توان در حرکت ها و توقف ها جمع کرد که به طور متناوب در مسیر قرار دارند. اگر تمام سرعت نقاط GPS در یک حرکت جمعی کمتر از 20 کیلومتر در ساعت باشد، آنگاه این نقاط GPS به عنوان نقاط کم سرعت انتخاب می شوند. چنین نقاط GPS با نقاط توقف همراه بود و بنابراین الگوی ترافیک توقف و حرکت را منعکس می کرد. در پانل سمت چپ شکل 7 نقاط هندسی نقاط کم سرعت و توقف GPS در طول روز دوشنبه 9 مارس در ووهان چین است. اگرچه نقاط کم سرعت و توقف فضای شهری را پوشش می دهند، اما به دلیل تعداد زیاد نقاط (بیش از 4.6 میلیون)، تشخیص بصری نقاط کم سرعت (جلو به زرد) از نقاط توقف (پشت به رنگ قرمز) دشوار است. . در پنل سمت راست شکل 7نقطه های سرعت کم و توقف در ساعت شلوغی ساعت 8 صبح در منطقه مرکز شهر هستند، که در آن به وضوح می توانیم نقاط توقف و سرعت کم را مشاهده کنیم که از نزدیک با یکدیگر همراه هستند و الگوی توقف و حرکت را نشان می دهد.
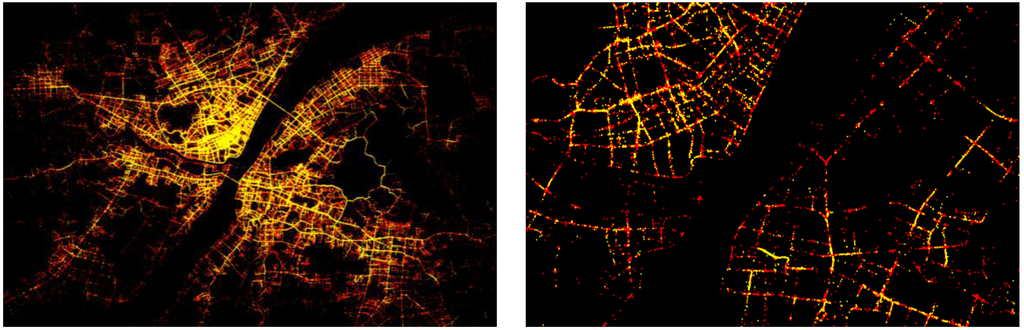
شکل 7. نقاط GPS کم سرعت (جلو به رنگ زرد) و توقف (پشت به رنگ قرمز) در طول روز در روز دوشنبه (9 مارس) ( پانل سمت چپ ) و در ساعت 8:00 صبح ( پانل سمت راست ).
بر اساس این نقاط توقف و سرعت پایین GPS، خوشههای مکانی-زمانی را میتوان در دو مرحله تولید کرد: ابتدا خوشههای فضایی را بر اساس نقاط GPS همزمان در برشهای زمانی مختلف تولید کنید (عکسهای فوری، ر.ک. ، شکل 2 )، دوم، خوشههای فضایی را که در طول زمان و مکان پیوسته هستند تا خوشه های مکانی-زمانی را تشکیل دهند. تاکسی ها به طور مداوم 24 ساعت رانندگی می کنند و توقف می کنند ( یعنی24 × 3600 = 86400 ثانیه در روز. از آنجایی که میانگین فاصله زمانی نمونه برداری برای داده های خودروی شناور 20 تا 60 ثانیه است، بنابراین، 20 ثانیه به عنوان حداقل تفکیک زمانی برای تقسیم زمان هر روز به 86400/20 = 4320 برش زمانی اتخاذ می شود. به این معنا که تمام نقاط GPS در هر روز را می توان با توجه به طول عمر آنها به 4320 عکس فوری نگاشت کرد که هر کدام شامل گروهی از نقاط GPS همزیستی بود. قبل از اعمال الگوریتم های بالا برای تولید خوشه های فضایی در هر گروه از نقاط GPS همزیستی (عکس فوری)، فاصله/شعاع خوشه بندی باید تعریف شود. بیست متر به صورت تجربی به عنوان شعاع انتخاب شد. زیرا در ازدحام ترافیک در دنیای واقعی، وسایل نقلیه بسیار نزدیک به یکدیگر هستند و علاوه بر تاکسی، وسایل نقلیه دیگری مانند اتوبوس های عمومی و خودروهای شخصی نیز در جاده ها وجود دارد. به این معنا که،
همه خوشه های فضایی برای دوشنبه 9 مارس 2009 تولید شدند. حداکثر اندازه خوشه های فضایی (به عنوان مثال، تعداد نقاط GPS تاکسی خوشه ای) به 215 رسید که به معنی توقف 215 تاکسی در همان زمان و مکان بود. بر اساس این خوشههای فضایی بهدستآمده، ما بیشتر خوشههای مکانی-زمانی متناظر را با اتصال خوشههای فضایی که در طول زمان پیوسته بودند و در فضا همپوشانی داشتند، تولید کردیم. دو معیار را می توان برای توصیف یک خوشه مکانی-زمانی استفاده کرد: (1) مدت زمان (طول عمر)، که از جدول زمانی اولین خوشه مکانی شروع می شود و در خط زمانی آخرین خوشه مکانی به پایان می رسد، و (2) تعداد از تمام نقاط GPS تاکسی، که مجموع تعداد نقاط GPS خوشه های فضایی متوالی در داخل خوشه مکانی-زمانی است. به طور کلی، یک مقدار کم تراکم وسایل نقلیه در یک بازه زمانی کوتاه حاکی از وضعیت عادی سیستم ترافیک است. با توجه به اینکه میانگین مدت چراغ راهنمایی 2 دقیقه است، خوشه های مکانی-زمانی که طول عمر آنها کمتر از 2 دقیقه است و در یک بازه زمانی کوتاه تراکم کمی دارند، بنابراین به عنوان یک حالت ترافیکی عادی در نظر گرفته می شوند. بنابراین، خوشه های مکانی-زمانی که طول عمر آنها بیشتر از 2 دقیقه است برای تجزیه و تحلیل الگوهای تحرک پذیرفته شد.
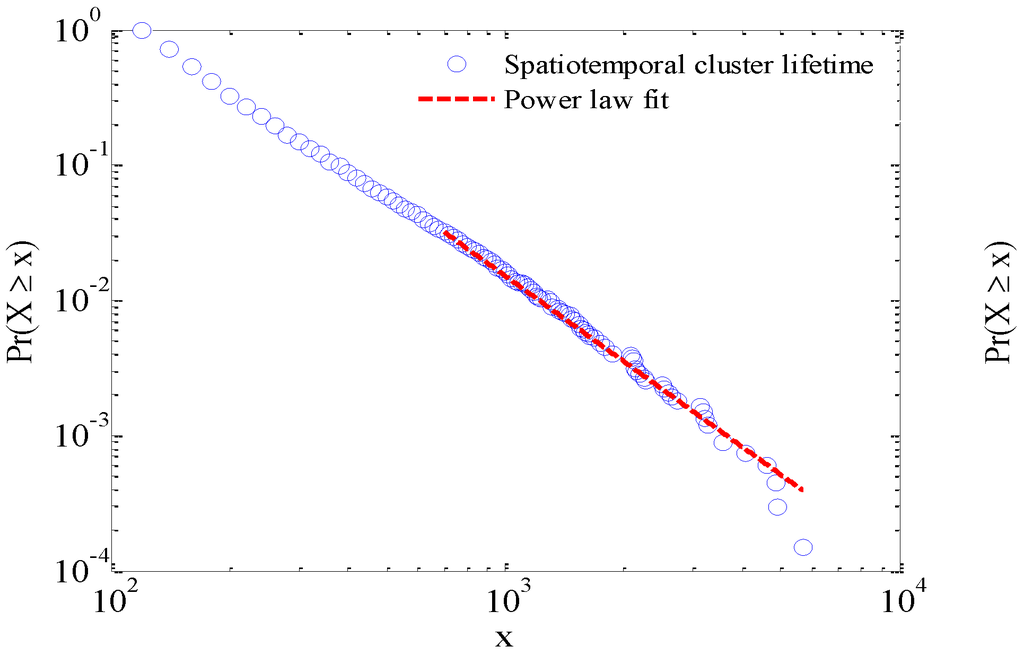
شکل 8. توزیع قانون توان طول عمر و اندازه خوشه های مکانی-زمانی.
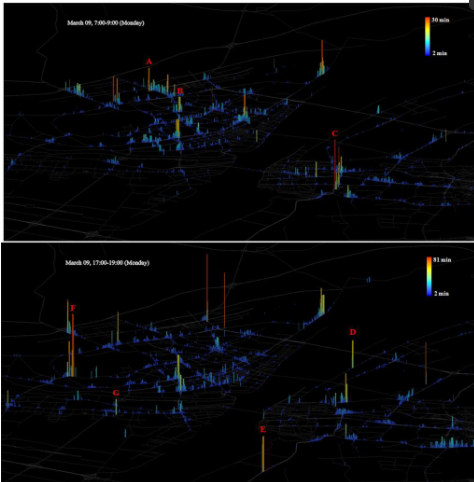
به طور جالبی، مشخص شد که طول عمر و اندازه تراکمهای ترافیکی هر دو توزیع قانون قدرت را نشان میدهند ( شکل 8 )، که نشاندهنده وجود مقیاسبندی و همچنین ساختار سلسله مراتبی قوی همانطور که در بخش 4 ذکر شد ، است. این به این معنی است که ازدحام ترافیک به طور مساوی توزیع نشده است. در عوض، یک سلسله مراتب مقیاس بندی را نشان می دهد که یکی از ویژگی های کلیدی سیستم های پیچیده شهری و سیستم های ترافیکی است. ازدحام ترافیک بر اساس طول عمر آنها در ساعات شلوغی روز دوشنبه در شکل 9 نشان داده شده است، جایی که قرمز نشان دهنده طولانی ترین دوره ازدحام ترافیک و آبی به معنای کوتاه ترین دوره است. این دورههای ازدحام ترافیک بر اساس نقاط GPS کم سرعت و توقف ایجاد شدهاندشکل 7 . برخلاف شکل 7 ، ساختارهای سلسله مراتبی و توزیع های مکانی- زمانی تراکم ترافیک در محیط های شهری را می توان به صورت بصری و کمی در شکل 9 ارزیابی کرد .

شکل 9. خوشه های مکانی-زمانی که بر اساس طول عمرشان در ساعات شلوغی تجسم شده اند: هر چه قرمزتر باشد، مدت تراکم ترافیک طولانی تر است.
در شکل 9 ، سلسله مراتب خوشه های مکانی-زمانی به طور ناموزون در یک ساختار چند هسته ای توزیع شده اند که الگوهای فضایی آن به سمت مرکز شهر در طول دوره شلوغی صبح از ساعت 7:00 تا 9:00 متمرکز شده است (پانل بالایی در شکل 9). ، اما در طول دوره شلوغی از ساعت 17:00 تا 19:00 غیرمتمرکز (پانل پایین در شکل 9)). تراکم ترافیک شناسایی شده بر اساس نقاط GPS ترافیکی به طور عینی الگوهای تحرک ترافیک در شهر ووهان را منعکس می کند. نواحی خوشههای طولانی فضایی-زمانی نشاندهنده ازدحام ترافیکی سنگین است، به این معنی که وضعیت ترافیک اطراف آنجا بدتر از سایر مناطق است. مشخص شد که مناطقی از خوشههای زمانی-فضایی طولانی عمدتاً در جادههای اصلی مانند ErHuanXian، جاده Zhongshan، جاده Jinghan و جاده Huangpu بر اساس سطح جادهها و محبوبیت محلی اتفاق میافتند. به این معنا که اکثر مناطق پر ازدحام با ساختارهای شبکه جادهای منطبق هستند. با وجود آن، تفاوت هایی بین ساعات شلوغی صبح و بعد از ظهر وجود دارد. به عنوان مثال، برخی از مناطق شلوغ مانند A و B (پانل بالایی در شکل 9در مرکز شهر در ساعات شلوغی صبحگاهی در ساعات شلوغی بعد از ظهر ناپدید می شوند (پانل پایینی در شکل 9 )، در حالی که سایر مناطق شلوغ مانند E و F (پانل پایین در شکل 9 ) در جهت بیرونی شهر در ساعات شلوغی بعد از ظهر ظاهر می شوند. تغییر الگوی تحرک ممکن است به دلیل جابجایی افراد از خانه به محل کار در صبح، از محل کار به خانه در بعد از ظهر و تفاوت فیزیکی واقعی مکان از خانه و محل کار باشد. به طور مشابه، منطقه خوشه زمانی طولانی C (پایین سمت راست در پانل بالایی در شکل 9 ) در ساعات شلوغی بعد از ظهر ناپدید می شود (پانل پایینی در شکل 9 )، در حالی که منطقه خوشه زمانی طولانی D (وسط سمت چپ در پانل پایینی در شکل 9)) در ساعات شلوغی بعد از ظهر ظاهر می شود. در واقع، منطقه C ایستگاه اصلی قطار در ووهان است و منطقه D ایستگاه قطار فرعی است. این نوع تغییر احتمالاً منعکس کننده نظم زمانی حرکت مردم بین ووهان و سایر شهرها است. با این حال، همه ازدحام ها در جاده های اصلی، مانند منطقه G (پانل پایین در شکل 9 ) در جاده باغ وحش رخ نداده است. چنین مناطقی میتوانند مناطق در حال توسعه بالقوه با شبکههای جادهای ضعیف اما جریانهای ترافیکی سنگین باشند، که در آن وضعیت ترافیک اطراف باید بهبود یابد. این می تواند ارزش توجه برنامه ریزان شهری و سیاست گذاران را داشته باشد.
بر اساس ویژگی مقیاس بندی ( ر.ک ، شکل 8 ) و قانون تقسیم سر/دم ذکر شده در بخش 4 ، مناطق ازدحام ترافیک در روز دوشنبه 9 مارس به یک سری ساختارهای سلسله مراتبی دو لاستیک در سطوح مختلف در بعد زمانی تقسیم شدند. به طول عمر آنها ( جدول 1 ). مفهوم اساسی در پشت سلسله مراتب، الگوهای تحرک ترافیک را از دیدگاه زمانی نشان می دهد. هر چه سطوح خوشه های مکانی-زمانی بالاتر باشد، مناطق تراکم ترافیک جدی تر هستند. میانگین طول عمر هر سطح (به عنوان مثال، 4، 8، 16 و 28 دقیقه) می تواند به عنوان شاخصی برای اندازه گیری میزان تراکم ترافیک تنظیم شود که می تواند مرجع مفیدی برای سیستم های ترافیکی شهری باشد. به عنوان مثال، 32 منطقه ازدحام ترافیکی وجود دارد که طول عمر آنها بیش از 28 دقیقه است، که مناطق پر ازدحام جدی را تشکیل می دهد. این در حالی است که درصدهای جدول 1 از نظر خاصیت مقیاس بندی با اصل 20/80 درصد مطابقت خوبی دارد که به این معنی است که 20 درصد ازدحام های ترافیکی جدی و 80 درصد آنها خفیف است. بنابراین، منابع انسانی و مالی محدود شهری باید بر روی این مناطق به شدت شلوغ متمرکز شود تا وضعیت ترافیک اطراف آن به روشی کارآمد و موثر بهبود یابد.

جدول 1. تعداد و درصد خوشه های مکانی- زمانی در سر و دم در روز دوشنبه.
6. نتیجه گیری
دادههای جریان ترافیک دنیای واقعی برای درک قوانین داخلی سیار یک سیستم شهری ضروری است. در این مقاله، ما بیش از 85 میلیون رکورد از دادههای خودروهای شناور را در ووهان، چین بررسی کردیم، جایی که تاکسیها به طور مداوم حرکت میکنند و توقف میکنند و کل فضای شهری را در طول روز و شب پوشش میدهند. میانگین سرعت تاکسیهای بلند دو الگوی تکرارپذیر متفاوت را در طول روزهای کاری و آخر هفته نشان داد. سرعت 20 کیلومتر در ساعت به عنوان آستانه برای تفکیک نقاط GPS به نقاط کم سرعت و معمولی انتخاب شد. ترکیب نقاط سرعت کم و توقف، الگوی حرکت توقف و حرکت را نشان میدهد که از آن خوشههای مکانی-زمانی تولید میشوند. خوشههای مکانی-زمانی ایجاد شده برای نشان دادن خاصیت مقیاسپذیری در طول زمان و مکان یافت شدند. که ازدحام بالقوه ترافیک و همچنین الگوهای تحرک ترافیک پویا و چند هسته ای را به صورت کمی پیشنهاد می کند. یک ساختار سلسله مراتبی دو لایه به طور مکرر در سطوح مختلف از طریق قانون تقسیم سر/دم به دست آمد. سطوح تولید شده به طور خودکار میزان تراکم ترافیک را نشان می دهد و می تواند به عنوان استانداردی برای اندازه گیری میزان تراکم ترافیک استفاده شود. از دیدگاه مکانی-زمانی، خوشه های مکانی-زمانی الگوهای پویا و چند هسته ای را به نمایش گذاشتند که به طور عینی و کمی ارزیابی شدند. سطوح تولید شده به طور خودکار میزان تراکم ترافیک را نشان می دهد و می تواند به عنوان استانداردی برای اندازه گیری میزان تراکم ترافیک استفاده شود. از دیدگاه مکانی-زمانی، خوشه های مکانی-زمانی الگوهای پویا و چند هسته ای را به نمایش گذاشتند که به طور عینی و کمی ارزیابی شدند. سطوح تولید شده به طور خودکار میزان تراکم ترافیک را نشان می دهد و می تواند به عنوان استانداردی برای اندازه گیری میزان تراکم ترافیک استفاده شود. از دیدگاه مکانی-زمانی، خوشه های مکانی-زمانی الگوهای پویا و چند هسته ای را به نمایش گذاشتند که به طور عینی و کمی ارزیابی شدند.
این مطالعه بینشی در مورد رفتار ترافیک از دیدگاه یک سیستم پیچیده ارائه می دهد. برای کار آینده، ابتدا بر روی ردیابی تکامل خوشههای مکانی-زمانی تمرکز میکنیم، یعنی نحوه شکلگیری و حرکت آنها در جادهها، که میتواند مکانیسمهای تراکم ترافیک را آشکار کند. دوم، ما سعی خواهیم کرد مناطق کانونی را از مناطق تراکم ترافیک متمایز کنیم تا بتوانیم الگوهای تحرک شهری را با دقت بیشتری ارزیابی کنیم. برای تمایز دقیق بین این دو نوع پدیده، به اطلاعات بیشتری مانند نام مکان های معنایی و تجزیه و تحلیل هندسی نیاز است.
منابع
- Dhingra، SL; گول، اول. نظریه جریان ترافیک دیدگاه های پژوهشی تاریخی. در مجموعه مقالات تئوری جریان ترافیک و کمیته خصوصیات (AHB45)، وودز هول، MA، ایالات متحده آمریکا، 8-10 ژوئیه 2008.
- Greenshields، BD; Weids، آمار FM با برنامه های کاربردی برای تجزیه و تحلیل ترافیک بزرگراه . بنیاد Eno برای کنترل ترافیک بزرگراه: Saugatuck، CT، ایالات متحده آمریکا، 1952. [ Google Scholar ]
- گرینبرگ، اچ . تجزیه و تحلیل ریاضی جریان ترافیک . بخش تونل ها و پل ها، بخش پروژه و برنامه ریزی، اداره بندر نیویورک: نیویورک، نیویورک، ایالات متحده آمریکا، 1958. [ Google Scholar ]
- Hägerstrand، T. در مورد افراد در علم منطقه چطور؟ پاپ Reg. علمی دانشیار 1970 ، 24 ، 6-21. [ Google Scholar ]
- Haight، FA به سوی یک نظریه یکپارچه ترافیک جاده ای. اپراتور Res. 1958 ، 6 ، 813-826. [ Google Scholar ] [ CrossRef ]
- کالنیس، پ. مامولیس، ن. Bakiras، S. در مورد کشف خوشه های متحرک در داده های مکانی-زمانی. در مجموعه مقالات نهمین کنفرانس بین المللی پیشرفت در پایگاه های داده مکانی و زمانی SSTD، Angra dos Reis، RJ، برزیل، 22-24 اوت 2005. صص 364-381.
- کرنر، کارشناسی فیزیک ترافیک. فیزیک جهان 1999 ، 12 ، 25-30. [ Google Scholar ]
- ناگاتانی، تی. فیزیک راهبندان. Rep. Prog. فیزیک 2002 ، 65 ، 1331-1386. [ Google Scholar ]
- Doulet، JF تحرک شهری: یک چارچوب مفهومی جدید. طرح شهری. انجمن 2004 ، 2 ، 90-92. [ Google Scholar ]
- بوگورنی، وی. کویجپرز، بی. Alvares، LO ST-DMQL: یک زبان جستجوی داده کاوی مسیر معنایی. بین المللی جی. جئوگر. Inf. علمی 2009 ، 23 ، 1245-1276. [ Google Scholar ]
- اسپاکاپیترا، اس. پدر و مادر، سی. دامیانی، ام.ال. Macedo، JA; پورتو، اف. Vangenot، CA دیدگاه مفهومی در مورد مسیرها. دانستن داده ها مهندس 2008 ، 65 ، 126-146. [ Google Scholar ] [ CrossRef ]
- یان، ز. پدر و مادر، سی. اسپاکاپیترا، اس. چاکرابورتی، دی. یک مدل ترکیبی و بستر محاسباتی برای مسیرهای فضایی- معنایی. در مجموعه مقالات هفتمین کنفرانس وب معنایی گسترده (ESWC)، هراکلیون، یونان، 30 مه تا 3 ژوئن 2010.
- هوانگ، سی. لی، سی ام؛ لی، CH در حال کشف خوشههای متحرک از پایگاههای داده مکانی-زمانی. در مجموعه مقالات هشتمین کنفرانس بین المللی طراحی و کاربردهای سیستم های هوشمند (ISDA ’08)، Kaohsiung، تایوان، 26-28 نوامبر 2008. صص 111-114.
- راسوگ، جی. Ghose، K. شناسایی و ردیابی خوشههای فضایی-زمانی با فیلتر کردن تاریخچه تطبیقی. در مجموعه مقالات کنفرانس بین المللی IEEE در کارگاه های داده کاوی کارگاه های آموزشی ICDM، Binghamton، NY، ایالات متحده، 15-19 دسامبر 2008. صص 448-457.
- کائو، اچ. مامولیس، ن. Cheung، DW کشف الگوهای تناوبی در توالی های مکانی-زمانی. IEEE Trans. بدانید. مهندسی داده 2007 ، 19 ، 453-467. [ Google Scholar ] [ CrossRef ]
- بذانی، ع. جورجینی، بی. رامبالدی، س. گالوتی، آر. Giovannini, L. قوانین آماری در تحرک شهری از داده های میکروسکوپی GPS در منطقه فلورانس. J. Stat. مکانیک. تئوری Exp. 2010 . [ Google Scholar ] [ CrossRef ]
- Hoque، MA; هنگ، ایکس. دیکسون، بی. تجزیه و تحلیل الگوهای تحرک برای تاکسی های شهری. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد محاسبات، شبکه و ارتباطات (IEEE ICNC)، مائوئی، HI، ایالات متحده آمریکا، 30 ژانویه تا 2 فوریه 2012.
- هلبینگ، دی. مولنار، پ. Farkas, IJ; Bolay، K. خود سازماندهی حرکت عابر پیاده. محیط زیست طرح. B طرح. طراحی 2001 ، 28 ، 361-383. [ Google Scholar ]
- هلبینگ، دی. ناگل، ک. فیزیک ترافیک و توسعه منطقه ای. تحقیر کردن فیزیک 2004 ، 45 ، 405-426. [ Google Scholar ]
- کرنر، BS ویژگی های تجربی خود سازماندهی در جریان ترافیک. فیزیک کشیش لِت 1998 ، 81 ، 3797-3800. [ Google Scholar ]
- لی، کیو. ژانگ، تی. Yu, Y. استفاده از محاسبات ابری برای پردازش دادههای شناور ماشین برای نظارت بر ترافیک شهری. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 1303-1322. [ Google Scholar ] [ CrossRef ]
- Rozenfeld، HD; ریبسکی، دی. Gabaix، X. Makse، HA مساحت و جمعیت شهرها: بینش های جدید از دیدگاهی متفاوت در مورد شهرها. صبح. اقتصاد Rev. 2009 , 101 , 2205-2225. [ Google Scholar ]
- کلاوزت، ا. شالیزی، CR; نیومن، توزیعهای قانون قدرت MEJ در دادههای تجربی. SIAM Rev. 2009 , 51 , 661-703. [ Google Scholar ] [ CrossRef ]
- Adamic، LA Zipf، Power-Laws و Pareto—A Ranking Tutorial. در دسترس آنلاین: http://www.hpl.hp.com/research/idl/papers/ranking/ranking.html (در 1 ژانویه 2013 قابل دسترسی است).
- Adamic، L. Unzipping قانون Zipf. طبیعت 2011 ، 474 ، 164-165. [ Google Scholar ] [ CrossRef ]
- جیانگ، بی. لیو، ایکس. مقیاسبندی فضای جغرافیایی از دیدگاه بلوکهای شهری و میدانی و استفاده از اطلاعات جغرافیایی داوطلبانه. بین المللی جی. جئوگر. Inf. علمی 2011 ، 26 ، 215-229. [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. جیانگ، بی. یک رویکرد جدید برای شناسایی نقاط پراکنده شهری بر اساس مقیاس بندی فضای جغرافیایی. بین المللی جی. ژئومات. Geosci. 2012 ، 2 ، 415-429. [ Google Scholar ]
© 2013 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution ( http://creativecommons.org/licenses/by/3.0/ ) توزیع شده است.
بدون نظر