1. معرفی
منطقه ساحلی به دلیل خدمات بومشناختی غنی و فراوان [ 1 ، 2 ] همراه با آسیبپذیری بالای آن در برابر تغییرات آبوهوایی اقیانوسی و آشفتگیهای محلی، یک چشمانداز فانوس دریایی را تشکیل میدهد [ 3 ]. منطقه ساحلی با میزبانی 40 درصد از جمعیت جهان در 100 کیلومتری خط ساحلی [ 4 ]، در معرض تغییرات عمیق و مداومی است، مانند افزایش سطح دریا [ 5 ]، از دست دادن عملکردهای حیاتی اکوسیستم (مانند فیلتر کردن آب، مواد غذایی). تولید، ترسیب کربن و تولید گردشگری؛ نگاه کنید به [ 1 ]) و اختلال در بافت پیچیده اجتماعی-اکولوژیکی [ 6 ]]. پیشبینی مکان و میزان تأثیرات ساحلی مستلزم درک پویایی فرآیندهای چشمانداز است که به طور پیچیده با الگوهای فضایی آنها مرتبط است [ 7 ].
مشاهدات زمین پتانسیل زیادی برای بررسی ویژگیهای ساحلی دارند زیرا ظرفیت آنها برای نمایش قابل اطمینان و تکراری منطقه ساحلی به روشی صریح فضایی با هزینههای نسبتاً کم است [ 8 ]. بزرگترین مجموعه ادبیات با استفاده از حسگرهای تفکیک فضایی درشت و متوسط مانند Landsat، MODIS، ASTER، RaDARSAT، SeaWiFS یا ابزارهای TOPEX/Poseidon بر روی مسائل مقیاس بزرگ تمرکز کرده است. در نتیجه، متغیرهای جهانی و منطقهای معنیدار مرتبط با مسائل ساحلی مانند پوشش زمین [ 9 ]، ارتفاع زمین [ 10 ]، خط ساحلی [ 11 ]، دمای سطح دریا [ 12 ]، غلظت کلروفیل دریا [ 12 ] یا ارتفاع دریا [ 13 ]] از تصاویر ماهواره ای به طور رایگان در دسترس گرفته شده اند. اگرچه این محرکهای فضایی به طور قابلتوجهی به علوم ساحلی کمک کردهاند، اما به دلیل وضوح فضایی نسبتاً پایین آنها قادر به توضیح فرآیندهای فردی که چشمانداز پیچیده را شکل میدهند، نیستند [ 14 ]. این محدودیت به شدت مدیریت منسجم چند مقیاسی مبتنی بر مجموعههای مقیاس بزرگ عناصر در مقیاس خوب را تضعیف میکند.
با پرتاب ماهواره IKONOS در سال 1999، نظارت ساحلی اطلاعات مکانی زیرمتری را که قادر به بررسی واحدهای چشم انداز (مانند خانه ها، درختان، مستعمرات مرجانی و غیره ) در مقیاس متر است، به کار گرفته است [ 8 ]. از آن زمان، سه حسگر چند طیفی دیگر با وضوح بسیار بالا (VHR)، QuickBird، GeoEye-1 و WorldView-2، به IKONOS به عنوان ابزارهای فضایی که قادر به اصلاح بافت ویژگیها و افزایش نسبت سیگنال به نویز هستند، پیوستند. بنابراین پیشرفت تکنولوژیک گونههای حرا [ 15 ]، گونههای مهاجم نمکزار [ 16 ]، دینامیک هیدرولوژیکی توربزارها [ 17 ] و تکههای ساحلی بدون درز [ 14 ] را فعال کرده است.] به طور دقیق نقشه برداری شود. با این حال، یک مبادله بین پوشش فضایی (≤20 کیلومتر نوار) و وضوح (≥0.5 متر و ≤2 متر) همراه با هزینه خرید بالا (≥12.5 $ ∙km -2 ) به شدت به این مطالعه بزرگ آسیب رسانده است. مناطق مقیاس
در سال 2005، Google Inc. Google Earth (GE) را منتشر کرد، یک نسخه رایگان در دسترس از Earth Viewer 3D که همه کاربران رایانه شخصی را قادر میسازد مناظر روی هم قرار گرفته را که از تصاویر ماهوارهای و هواپیما بر اساس یک محیط سیستم اطلاعات جغرافیایی (GIS) به دست میآید، تجسم کنند. GE تصاویری را بر اساس دادههای ماهوارهای VHR به عنوان یک پلتفرم منبع باز ارائه میدهد، که ثابت کرده است برای اعتبارسنجی کیفی جنگلهای مانگرو جهانی [ 18 ] و ارجاع به تغییرات تالاب در چین [ 19 ]، برای مثال، دارایی است. به استثنای تعداد محدودی از مطالعات ارزیابی دقت افقی GE [ 20 ]، حذف سایه ها از GE [ 21 ] و نقشه برداری از کاربری خاص زمین/پوشش زمین [ 22 ]]، تصاویر GE به ندرت به عنوان ماده اولیه برای نقشه برداری ساحلی VHR استفاده شده است. در واقع، یک روش قابل انتقال و آسان برای بهره برداری از تصاویر جنرال الکتریک، چارچوبی مشترک و قوی را فراهم می کند که بر اساس آن، گروه بزرگی از دانشمندان و سهامداران ممکن است به مسائل ساحلی رسیدگی کنند.
یک تیم پیشگام تلاش کرد تا از تصاویر VHR GE به عنوان منبع مستقیم برای نقشه برداری استفاده کند [ 22 ]. با این حال، روششناسی آنها از محدودیتهای متعددی رنج میبرد (به عنوان مثال ، نرمافزار غیر انگلیسی که برای دانلود تصاویر جنرال الکتریک استفاده میشود، رابطه ارتفاع-رزولوشن جنرال الکتریک، تاریخ مقایسه تصاویر جنرال الکتریک در مقابل تصاویر بومی و غیره ).) که به طور قابل توجهی مانع تکرارپذیری نتایج آنها و در نتیجه انتقال پذیری روش آنها به جامعه شد. با هدف خدمت رسانی تا حد امکان به افراد درگیر در مدیریت جغرافیایی، باید روشی آسان و شفاف ایجاد شود تا هر فردی که مجهز به کامپیوتر، دسترسی به اینترنت، مجوز حرفه ای جنرال الکتریک و نرم افزار GIS باشد، بتواند سواحل را مطالعه کند. مناظر بدون درز در VHR. ما تلاش کردهایم چنین روشی را توسعه دهیم و آن را در یک ساحل پیچیده با صخرههای مرجانی، علفهای دریایی و حرا و همچنین مزارع و روستاها به کار ببریم (شیراهو، جزیره ایشیگاکی، ژاپن، شکل 1).). سه موضوع متداول مطرح میشود: تصاویر GE برای (1) عمق آب، (2) پوشش بستر دریا و (3) نقشهبرداری پوشش زمین چقدر قابل اعتماد هستند؟ قابلیت اطمینان بر اساس مقایسه بین دقت نقشه برداری حاصل از تصاویر جنرال الکتریک و تصاویر فضایی تجاری مربوطه آنها ایجاد خواهد شد.
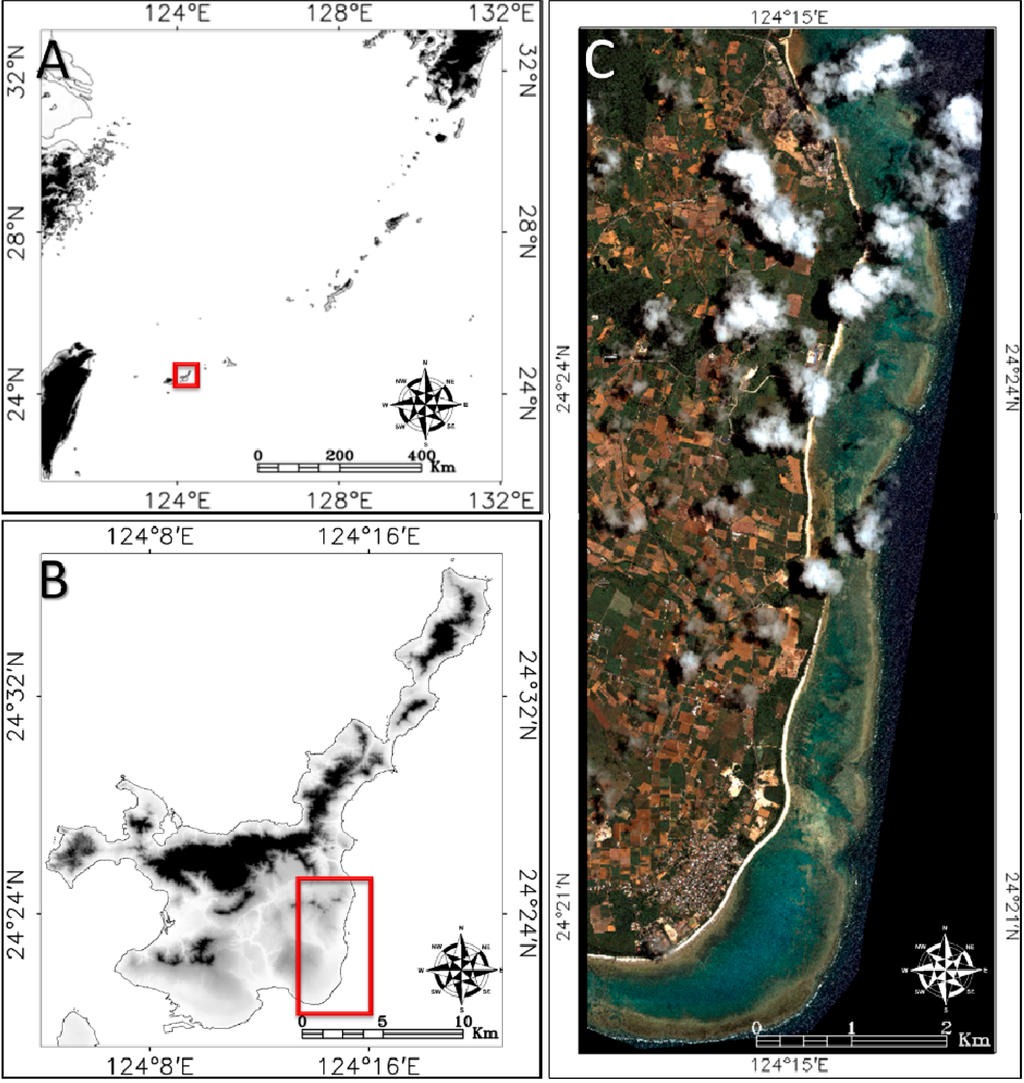
شکل 1. منطقه مورد مطالعه در ( A ) مجمع الجزایر Yaeyama (ژاپن)، ( B ) در امتداد ساحل جنوب شرقی جزیره Ishigaki قرار دارد که Shiraho نامیده می شود. منطقه مورد مطالعه با ( C ) تصویری با رنگ طبیعی (R، باند 3؛ G، باند 2؛ B، باند 1) تصویر برگرفته از تصاویر QuickBird جمعآوریشده در 2 ژوئیه 2007 نشان داده شده است. این تصویر خاص به دلیل استفاده صریح از آن خریداری شده است. در پایگاه داده های Google Earth و DigitalGlobe.
2. مواد و روشها
2.1. سایت مطالعه
جزیره ایشیگاکی که در منتهی الیه جنوب غربی مجمع الجزایر ژاپن قرار دارد، در 1200 کیلومتری طاق ریوکیو قرار دارد که دارای سواحلی با صخره های مرجانی و تراس هایی از صخره های مرجانی نوظهور است. آب های ساحلی ایشیگاکی از مرز قوی غربی کوروشیو جریان سود می برند که آب های استوایی دریای فیلیپین را به آب های نیمه گرمسیری دریای چین شرقی متصل می کند [ 23 ]. به طور خاص، منطقه Shiraho میزبان یک تنوع زیستی دریایی غنی است که شامل سه اکوسیستم کربن آبی محوری ( به عنوان مثال ، حرا، علفهای دریایی و صخرههای مرجانی)، گونههای ماهی، و بزرگترین مستعمره مرجانهای نادر پشته آبی جهان ( Heliopora coerulea ) است. از زمانی که یک سفید شدن شدید در سال 1998 رخ داد، این منطقه در مرحله بازیابی بوده است [ 24] که باعث از بین رفتن قابل توجه مرجان های سالم در صخره های ژاپن شد، به عنوان مثال، [ 25 ]; این کانون اکولوژیکی در حال حاضر با رواناب خاک و رسوب ناشی از افزایش تعداد زمین های کشاورزی در حوضه مجاور (حوضه آبخیز تودوروکی) مقابله می کند. علاوه بر صخره با یک صخره به خوبی توسعه یافته (صخره خارجی، تاج صخره، کانال ها و خندق) که شامل تکه های پیچیده انشعاب ( Acropora spp.) و عظیم ( Porites spp.، Heliopora coerulea است.) مرجان و علف دریایی، حوضه آبخیز شیراهو یک چشم انداز روستایی متشکل از زیرساخت های انسانی (ساختمان ها و جاده ها) خوشه ها، مزارع زراعی (نیشکر، خاک لخت) و ماتریس های علفزار و همچنین مناطق فشرده جنگلی را نشان می دهد. درجه بالایی از تنوع چشمانداز و ناهمگونی که در سراسر ساحل بدون درز Shiraho مشاهده میشود، آن را به عنوان منطقه هدف نقشهبرداری ما مناسب میسازد.
2.2. مجموعه داده های سنجش از راه دور
برخلاف مجوز رایگان در دسترس، مجوز حرفه ای جنرال الکتریک (399 دلار آمریکا در سال) اجازه می دهد تا تصاویر RGB نمایش داده شده (با وضوح رادیومتریک 8 بیتی) در قالب یک فایل JPEG فشرده نشده Premium (4800 × 4153 پیکسل) بدون واترمارک حق چاپ ذخیره شوند. جلوگیری از هرگونه نقشه برداری اطلاعاتی ساخت مجموعه داده فضایی GE متکی بر مراحل متوالی است که می توانند در یک فلوچارت خلاصه شوند ( شکل 2 ).
شکل 2. فلوچارت مفهومی که مراحل متوالی را توصیف می کند که یک موزاییک با وضوح بسیار بالا مشتق شده از Google Earth را قادر می سازد ایجاد شود.
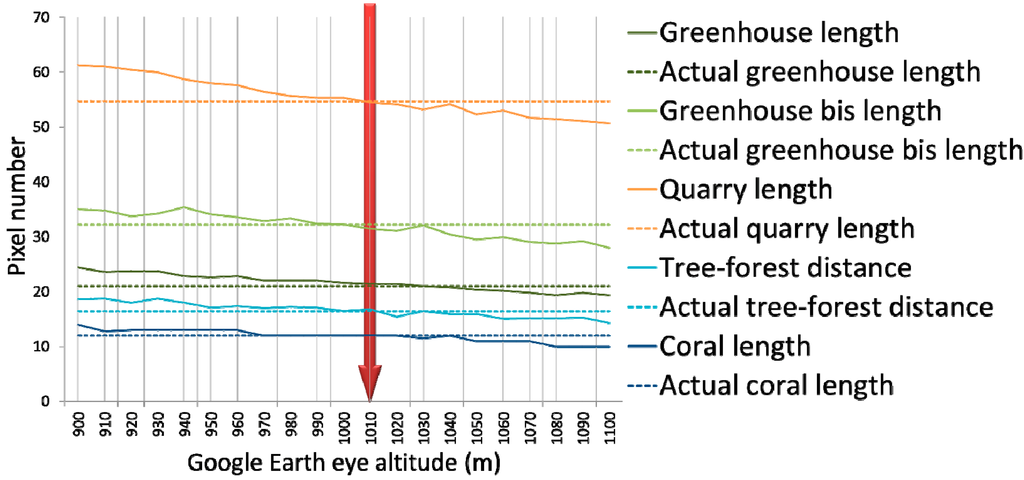
(1) هنگامی که منطقه مورد علاقه (از مقیاس محلی تا منطقه ای) در GE انتخاب شد (اینجا، 44 کیلومتر مربعمنطقه Shiraho)، با استفاده از دکمه تصاویر تاریخی موجود در نوار ابزار جنرال الکتریک، باید تاریخ کسب را مشخص کنید (اینجا، 2 ژوئیه 2007). (2) در پایین تصویر، نام شرکت حسگر منبع (در اینجا، DigitalGlobe) به دنبال «تصویر © سال» تعبیه شده است. DigitalGlobe تصاویر ماهواره ای چندطیفی با وضوح بالا (IKONOS، QuickBird، GeoEye-1 و WorldView-2، به ترتیب در سال های 1999، 2001، 2008 و 2009) ارائه می دهد. اگرچه این حسگر اعلام نشده است (اینجا، QuickBird، QB) بر اساس تاریخ خرید و راه اندازی حسگر و همچنین مرورگرهای آرشیو DigitalGlobe و GeoEye (به ترتیب browse.digitalglobe.com و geofuse.geoeye.com) آشکار می شود. . با استفاده از تاریخ دریافت در ناحیه مورد نظر، یک سری از پارامترهای تصویر مانند وسیله نقلیه حسگر، بیشینه و میانگین زوایای نادر ناحیه، میانگین آزیموت هدف، و منطقه حداقل ارتفاع خورشید، می تواند آزادانه بازیابی شود. از آنجایی که ارتفاع خورشید با زمان در یک تاریخ خاص در یک مکان خاص مرتبط است، میتوان زمان اکتساب (در اینجا، ساعت 02:45 به وقت گرینویچ، GMT) با استفاده از یک ماشینحساب خورشیدی آنلاین رایگان محاسبه کرد (به عنوان مثال،http://www.esrl.noaa.gov/gmd/grad/solcalc/ )، که برای استنتاج سطح جزر و مد بسیار مهم است. (3) قرار دادن چشم مجازی جنرال الکتریک در ارتفاع و هندسه مناسب نکات مهم بعدی است. یک تجزیه و تحلیل اولیه مبتنی بر اندازهگیری پیکسلهای پنج ویژگی ساحلی است که بر روی تصویر QB با اندازه پیکسل 0.6 متری (خطوط نقطهدار در شکل 3 ) و تصاویر GE به تدریج در امتداد شیب ارتفاع چشمی بین 900 تا 1100 متر ذخیره میشوند (خطوط ثابت در شکل 3 ). تا جایی که تلاقی بین خطوط نقطه چین و یکپارچه ( شکل 3 را ببینید) ارتفاع چشمی را نشان می دهد که در آن اندازه پیکسل GE با QB برای هر ویژگی مطابقت دارد، ارتفاع چشم 1010 متر برای پنج ویژگی به اتفاق نظر می رسد. (4) سپس می توان یک طرح اکتساب در منطقه مورد علاقه ایجاد کرد که ارتفاع چشم مناسب و همپوشانی حداقل 30٪ بین تصاویر به هم پیوسته را شامل می شود. (5) در امتداد طرح پرواز، تنظیم دقیق ارتفاع چشم با لغزنده کشیدن، از اهمیت ویژه ای برخوردار است، روی “N” روی قطب نما کلیک کنید تا انحراف را روی شمال تنظیم کنید و با استفاده از کنترل زمین روی صفحه، میدان دید را در نادر قرار دهید. همان قطب نما (6) پس از جمع آوری تمام تصاویر VHR (در اینجا، n= 39)، یک روش موزاییک انجام می شود که با همپوشانی قابل توجه بین تصاویر تسهیل می شود. نسخه آزمایشی رایگان نرمافزار Bioimage Mayachitra Imago (Mayachitra Inc., Santa Barbara, CA, USA) تصاویر RGB را قادر میسازد بر اساس الگوریتم چرخش-مقیاس-ترجمه (RST) موزاییک شوند [ 26 ]، که تصاویر را با هم تراز میکند. تبدیل تصاویر ورودی (نه کشش و نه انحراف) برای مطابقت بهینه با داده های سه بعدی همپوشانی. (7) موزاییک VHR RGB به دست آمده با استفاده از نرمافزار QGIS رایگان موجود (qgis.org) بر اساس نقاط کنترل زمینی (GCP) ثبت میشود (RST تاب برداشتن و نمونهبرداری مجدد نزدیکترین همسایه، RMSE <0.6) (اینجا، n = 45، نگاه کنید پرچم های قرمز در شکل 4ج) مختصات جغرافیایی که مستقیماً بر اساس موقعیتهای جغرافیایی GE (پیشبینی طول/طول جغرافیایی و مبدأ سیستم ژئودتیک جهانی 1984 (WGS84) در پایینترین ارتفاع چشمی است که بیشترین دقت ممکن ( یعنی 7 متر) را ارائه میدهد ( شکل 4 A) . نکته مهم این است که روش موزاییک کردن ممکن است در طول 30 روز از نسخه آزمایشی Mayachitra Imago به صورت رایگان انجام شود و پس از آن به ترتیب از 200 تا 1500 دلار آمریکا برای یک دانشجو و مجوز تحصیلی هزینه خواهد داشت. همچنین، مرحله 6 ممکن است نادیده گرفته شود و مرحله 7 ممکن است برای هر تصویر اعمال شود تا یک موزاییک نهایی از تصاویر ثبت شده بدست آید.
شکل 3. نمودار منحنی که ارتفاع چشم Google Earth و تعداد پیکسل را مشخص می کند که اهداف ساحلی مرجع خاص را مشخص می کند. خطوط نقطهدار مربوط به تعداد پیکسل واقعی هر هدف مرجع است که در تصویر QuickBird اندازهگیری میشود، و خطوط ثابت مربوط به تعداد پیکسل اهداف است که از تصاویر Google Earth ذخیره شده در محدوده ارتفاع چشم 900-1100 متر به دست میآید.
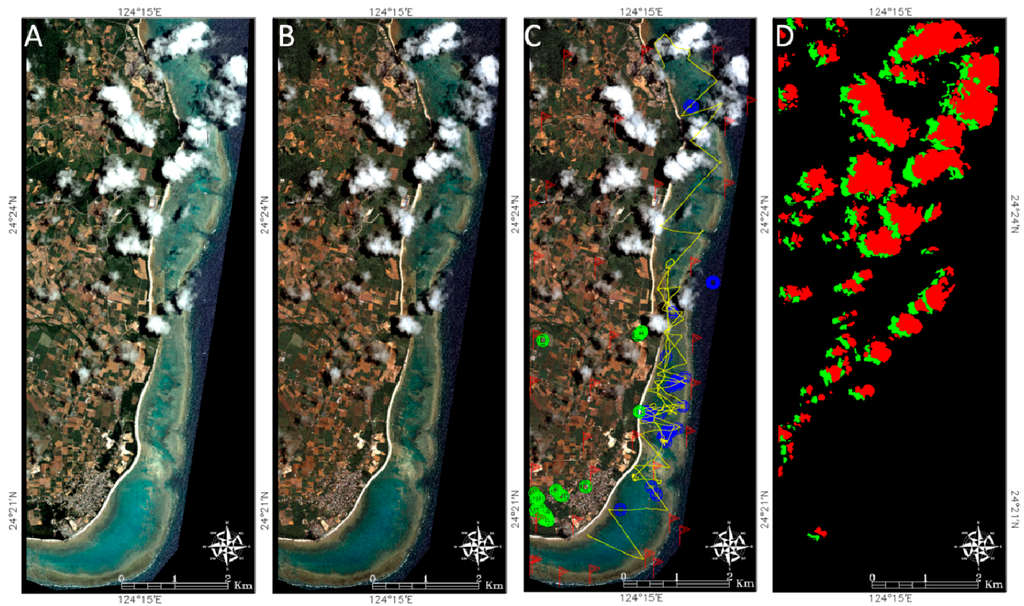
برای ارزیابی پتانسیل GE برای مطالعه نقشهبرداری ساحلی VHR، تصاویر QB دقیقاً مربوطه جمعآوریشده در 2 ژوئیه 2007 در ساعت 2:45 GMT در منطقه Shiraho خریداری شد. تصویر 8 بیتی از چهار تصویر چند طیفی (آبی، سبز، قرمز و مادون قرمز) با وضوح فضایی 2.4 متر و یک تصویر پانکروماتیک با وضوح فضایی 0.6 متر تشکیل شده است. وضوح فضایی تصاویر چند طیفی را می توان با استفاده از تکنیک همجوشی در سطح پیکسل، شفاف سازی، تا وضوح پانکروماتیک افزایش داد [ 27 ]. بر اساس نتایج قبلی [ 14]، این روش با استفاده از شبیهسازی تصویر پانکروماتیک 2.4 متری استفاده شد که انتقال نوری سنسور QB، تبدیل شارپسازی گرم-اشمیت، و نمونهبرداری مجدد کانولوشن مکعبی را به حساب میآورد. در نتیجه، مجموعه داده منبع دارای تصاویر RGB (حذف مادون قرمز) با وضوح فضایی 0.6 متر است، بنابراین با تصاویر GE مشابهت دارد. در ابتدا با ارجاع به پیشبینی UTM 52 N، مجموعه داده منبع بیشتر ثبت شد (تحریف RST و نمونهبرداری مجدد نزدیکترین همسایه) بر اساس 45 GCP قبلی (RMSE <0.6) تحت پیشبینی طول و عرض جغرافیایی ( شکل 4 B).
به دلیل نگرانیهای مربوط به قابلیت انتقال، ما مجموعه دادههای GE و منبع را مستقیماً از اعداد دیجیتال (DN) بدون اصلاحات رادیومتری (تابش و بازتاب) یا نور خورشید پردازش کردیم. ابرها و سایههای حاصل از آنها با استفاده از یک طبقهبندی قبلی که از یک ترسیم بصری مبتنی بر تجزیه و تحلیل است، پوشانده شدند ( شکل 4 C).
شکل 4. تصاویر با رنگ طبیعی (RGB) از سایت مورد مطالعه که از ( A ) موزاییک با وضوح بسیار بالا مشتق شده از Google Earth و ( B ) تصاویر pansharpened QuickBird ناشی می شود. ( ج ) تصویر طبیعی از محل مطالعه که با مکانهای حقیقت زمین پوشانده شده است: پرچمهای قرمز نماد مکانهای 45 نقطه کنترل زمینی هستند. مربع های آبی ( 1005 = n ) و دایره ها (495 = n ) به ترتیب نشان دهنده نقاط آموزش دریایی و اعتبار سنجی و مربع های سبز ( n = 737) و دایره ها ( n = 363) به ترتیب نشان دهنده نقاط آموزش و اعتبار سنجی زمین هستند. نقاط زرد نشان دهنده محل 22481 اندازه گیری صوتی است. ( دی) تصویر ابرها (به رنگ قرمز) و سایه های مربوطه (به رنگ سبز) را ماسک کنید.
2.3. عمق آب ساحلی و انواع پوشش
داده های کار میدانی ( شکل 4 C) برای بازیابی عمق آب و نقشه برداری دریایی و زمینی از 25 تا 31 ژانویه 2013 جمع آوری شد و به عنوان داده های اعتبارسنجی برای تصاویر سنجش از راه دور استفاده شد. از آنجایی که این کمپین پنج سال و نیم پس از دریافت ماهواره انجام شد، اصلاح دقیق سطح جزر و مد هم برای بررسی سونار و هم برای تصویر ماهواره ای امکان مقایسه عمق آب بررسی شده و حاصل از تصویر را بر اساس یکسان فراهم کرد. . از آنجایی که هیچ رویداد مهم پرانرژی، مانند سونامی یا طوفان قوی، برای آسیب رساندن به منطقه شیراهو و هیچ دوره سفید شدنی که تسلط صخرههای مرجانی را تهدید کند، وجود نداشت، ممکن است منطقاً یک ثبات فضایی اجتماعی-اکولوژیکی را فرض کنیم ( یعنیبدون تغییر حیاتی در زیستگاه های انسانی و طبیعی) در طول دوره ماهواره به میدان. اثر فصلی بیشتر مورد بحث قرار خواهد گرفت.
2.3.1. حمام سنجی و توپوگرافی
یک بررسی صوتی برای اندازه گیری عمق آب منطقه تالاب شیراهو انجام شد. صداگذاری از یک قایق ماهیگیری کوچک مجهز به مبدل دو فرکانس (50/200 کیلوهرتز) (تک پرتو) و آنتن GPS 12 کاناله (Lowrance LCX-15MT) انجام شد. دادهها در فرکانس 1 هرتز در یک کارت چند رسانهای (MMC) ثبت شد و قایق ترانسکتها را در سراسر تالاب با سرعت متوسط 1 m∙s -1 دنبال کرد و تنوع زیادی از عمق آب و پوشش بستر دریا را در بر گرفت. دقت فضایی افقی و عمودی ارائه شده توسط سیستم صوتی به ترتیب به 1 متر و 0.03 متر می رسد [ 28 ]. در مجموع 22481 اندازه گیری فردی با جفت کردن ارتفاع پیش بینی جزر و مد GMT و Ishigaki برای سطح جزر و مد ثبت و تصحیح شد. (http://www1.kaiho.mlit.go.jp/KANKYO/TIDE/tide_pred/index_e.htm ). مجموعه داده تصحیح شده به تعیین کمیت دقت مدلهای عمق نسبی دیجیتال (DRDM) کمک میکند.
برای محاسبه یک DRDM با استفاده از یک روش ساده اما ماهر که فقط بر اساس تصاویر RGB است، ما تبدیل نسبت کالیبره شده [ 29 ، 30 ] را انتخاب کردیم، و عمق آب را به صورت زیر حل کردیم:
که در آن DN i و DN j به ترتیب به اعداد دیجیتال باند موج i و j اشاره دارند. m 1 و m 0 شیب و برش مدل خطی نصب شده هستند. nیک ثابت ثابت برای اطمینان از مثبت بودن لگاریتم طبیعی است. با توجه به افزایش جذب نور توسط آب از نوارهای آبی به قرمز، ما سه ترکیب طیفی ممکن را برای هر مجموعه داده سنجش از دور آزمایش کردیم. شش DRDM حاصل با اندازهگیریهای عمق آب مقایسه شد و به طور خاص برای سطح جزر و مد محدود به زمان اکتساب ماهواره اصلاح شد. دقت DRDM با محاسبه ضریب همبستگی محصول – لحظه پیرسون ( r ) و ضریب تعیین مربوط به مدل خطی برازش شده ( R2 ) تعیین شد. مقایسه دقت DRDM برای نشان دادن اهمیت تفاوت ها با استفاده از معادله زیر انجام شد:
که در آن Ri2 و Rj2 به ضرایب خطی (تعیین روابط بین عمق آب مدل شده و واقعی) مربوط به DRDM i و DRDM j اشاره دارد . و N i و Nj به ترتیب با مقدار کل صداها در DRDM i و DRDM j مطابقت دارند. به دلیل حجم نمونه بزرگ و قضیه حد مرکزی، از مقدار Z می توان با اطمینان برای آزمایش سطح معناداری بین دو DRDM استفاده کرد زیرا Zتوزیع را می توان با یک توزیع نرمال تحت فرضیه صفر تقریب زد.
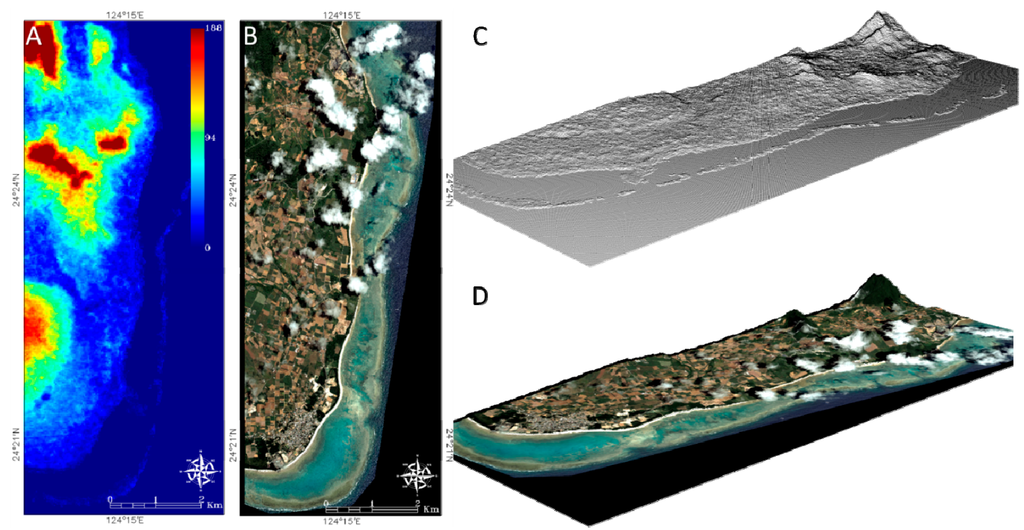
دادههای توپوگرافی، که از مجموعه دادههای سنجش از راه دور مشتق نشدهاند، برای بررسی اینکه آیا نتایج نقشهبرداری مرتبط با انواع پوشش زمینی را بهبود میبخشد، مورد استفاده قرار گرفتند. برای مقرون به صرفه بودن، دادههای ارتفاعی آزادانه در دسترس از رادیومتر گسیل و بازتاب حرارتی پیشرفته فضایی (ASTER) مدل ارتفاع دیجیتال جهانی (GDEM) نسخه 2، که در یک ثانیه قوسی (تقریباً 30 متر در استوا) و 8 متر ارائه شد، تهیه شد. وضوح افقی و عمودی ( http://www.jspacesystems.or.jp/ersdac/GDEM/E/4.html ). یک مدل ارتفاع رقومی با تفکیک فضایی 0.6 متر با درون یابی به نقاط داده GDEM مثلثی شده با شبکه Delaunay ایجاد شد ( شکل 5 A). ترکیبی از GDEM و GE با رنگ طبیعی (شکل 5 B) داده ها شامل محاسبه یک ابر نقطه سه بعدی مبتنی بر ارتفاع ( شکل 5 C) است که تصویر GE را می توان روی آن قرار داد ( شکل 5 D).
شکل 5. نقشه های داده های ارتفاع ( A ) و ( B ) رنگ طبیعی (RGB) بر روی سایت مورد مطالعه که به ترتیب از مدل جهانی ارتفاع دیجیتال نسخه 2 و موزاییک با وضوح بسیار بالا مشتق شده از Google Earth ناشی می شوند. بر اساس دادههای xyz، ( C ) یک ابر نقطه سهبعدی ساخته شد، که تصویر RGB روی آن پوشانده شد ( D ).
2.3.2. انواع پوشش ساحلی
به دلیل دقت لازم، جمعآوری تصاویر دریایی همزمان با بررسی سونار و تعیین انواع پوشش زمینی با استفاده از دانش محلی منطقه و بازرسی تصویر انجام شد.
تصاویر زیر آب از یک دوربین فیلمبرداری کمهزینه با وضوح بالا (GoPro Hero 3، 1440 رزولوشن، 30 فریم در ثانیه با میدان دید وسیع) که درست در زیر سطح آب قرار داده شده است، بهگونهای که بسترهای بسیار کمعمق دریا قابل نظارت باشد، به دست آمدهاند. مجموعه ای از فیلم های ضبط شده 7 ساعت و 54 دقیقه که با دقت افقی 1 متر مکان یابی شدند (به بررسی سونار مراجعه کنید) امکان استخراج و تجزیه و تحلیل بیشتر 166 تصویر با کیفیت بالا را فراهم کرد. شبکه ای از 100 مورد توزیع شده به طور مساوی بر روی هر تصویر قرار داده شد تا سطح اشغال شده توسط انواع مختلف بستر دریا را کمی کند ( n = 15، جدول 1)). با تکیه بر درصد نوع غالب بستر دریا (بیش از 90%)، 10 تصویر به اصطلاح خالص بر اساس نوع بستر انتخاب و به عنوان نماینده نوع ذاتی آنها در نظر گرفته شد. با تطبیق مکان تصاویر خالص و پیکسل های مربوطه، یک ناحیه بافر طیفی یکنواخت در اطراف هر پیکسل رشد داده شد به طوری که یک سری از 100 پیکسل به هر نوع بستر دریا اختصاص داده شد.
داده های مرجع زمین از ترکیبی از ارجاع جغرافیایی درجا و تفسیر تصویر تشکیل شده است. پانلی متشکل از 11 نوع زمین ( جدول 1 ) به عنوان نماینده انواع پوشش در شیراهو انتخاب شد. برای انواع پراکنده اما قابل توجه، مانند مزارع نیشکر و جنگل های حرا، مختصات جغرافیایی محیط هدف با استفاده از GPS دستی Garmin eTrex 20 به دست آمد. برای اطلاعات فضایی و طیفی به اندازه کافی متضاد، پیکسل های گره خورده به انواع زمین های باقی مانده ( n = 9، جدول 1 ) از طریق یک بازرسی بصری توسط یک تحلیلگر اختصاص داده شدند. برای هر نوع زمین، 100 پیکسل بین یا اطراف پیکسلهای هسته انتخاب شد ( یعنی، تطبیق مکان های داده های بررسی و نقشه برداری) برای تعیین مجموعه داده ای که در یک چشم انداز ساحلی یکپارچه متعادل است.
جدول 1. شرح 26 نوع پوشش ساحلی بدون درز در شیراهو که شامل 15 کلاس دریایی و 11 کلاس زمینی است.
2.3.3. طبقه بندی پوشش های ساحلی و ارزیابی دقت
طبقه بندی منطقه مورد مطالعه برای هر یک از مجموعه داده های سنجش از دور انجام شد تا قابلیت اطمینان GE برای نقشه برداری ساحلی آزمایش شود. پیکسلهای حقیقت زمینی که ۲۶ کلاس را مشخص میکنند به دو خوشه مستقل تقسیم شدند: خوشه آموزشی، که به تعریف امضاهای طیفی خاص کلاس مورد نیاز برای طبقهبندی کمک کرد، و خوشه اعتبارسنجی، که برای ارزیابی دقت فرآیند طبقهبندی استفاده شد. از 100 پیکسل نماینده هر کلاس، 67 و 33 پیکسل بهترتیب بهطور تصادفی به خوشههای آموزشی و اعتبارسنجی نسبت داده شدند. الگوریتم حداکثر احتمال گسترده (ML) (QGIS) یک رویه مبتنی بر پیکسل و نظارت است که توسط 67 پیکسل از 26 کلاس تغذیه می شود. قبل از راه اندازی طبقه بندی کننده ML، یک مرز منحنی که زمین را از آب جدا می کند به صورت دستی بر روی خط مرزبندی شن و ماسه مرطوب / خشک ترسیم شد. روش ML بر روی یک منطقه دریایی خالی از خشکی بر اساس مجموعه داده های RGB و RGB + عمق سنجی انجام شد و همچنین بر روی یک منطقه خشکی خالی از دریا بر اساس مجموعه داده های توپوگرافی RGB و RGB + اعمال شد.
خوشه اعتبارسنجی برای ایجاد یک ماتریس سردرگمی مورد نیاز بود تا دقت هر طبقهبندی ( n =8) را بتوان کمیسازی کرد. این تکنیک بر نسبت پیکسل هایی است که به درستی در تصویر حاصل بر اساس تطابق بین هویت کلاس اعتبارسنجی و پیکسل های طبقه بندی شده طبقه بندی شده اند. چهار شاخص نتایج ماتریس سردرگمی را ترکیب می کنند: دقت کلی (OA)، ضریب کاپا (κ)، دقت تولید کننده (PA) و دقت کاربر (UA). OA با تقسیم تعداد کل پیکسلهای طبقهبندی شده صحیح بر تعداد کل پیکسلهای اعتبارسنجی ( به عنوان مثال ، مورب ماتریس سردرگمی) تعیین میشود، در حالی که κ نسبت واحدی از توافق دقت بالاتر از تخصیص تصادفی کلاسها را فراهم میکند.به عنوان مثال ، خارج از قطر ماتریس سردرگمی). PA (خطای حذف) و UA (خطای کمیسیون) درصد پیش بینی های صحیح را برای هر کلاس ساحلی تعیین می کنند [ 31 ]. مقایسه بین دقت طبقه بندی برای تأکید بر اهمیت تفاوت ها با استفاده از معادله زیر انجام شد:
که در آن C i و C j به ترتیب به پیکسل های طبقه بندی شده مربوط به طبقه بندی i و طبقه بندی j اشاره دارد. و N i و N j به ترتیب با تعداد کل پیکسل های اعتبارسنجی در سراسر طبقه بندی i و طبقه بندی j مطابقت دارند. به دلیل حجم نمونه بزرگ و قضیه حد مرکزی، مقدار Z میتواند با اطمینان برای آزمایش سطح معنیداری بین دو طبقهبندی استفاده شود، زیرا Zتوزیع را می توان با یک توزیع نرمال تحت فرضیه صفر تقریب زد. برای محاسبه معناداری آماری از آزمون دو طرفه استفاده شد.
3. نتایج
3.1. مقایسه بازیابی عمق آب
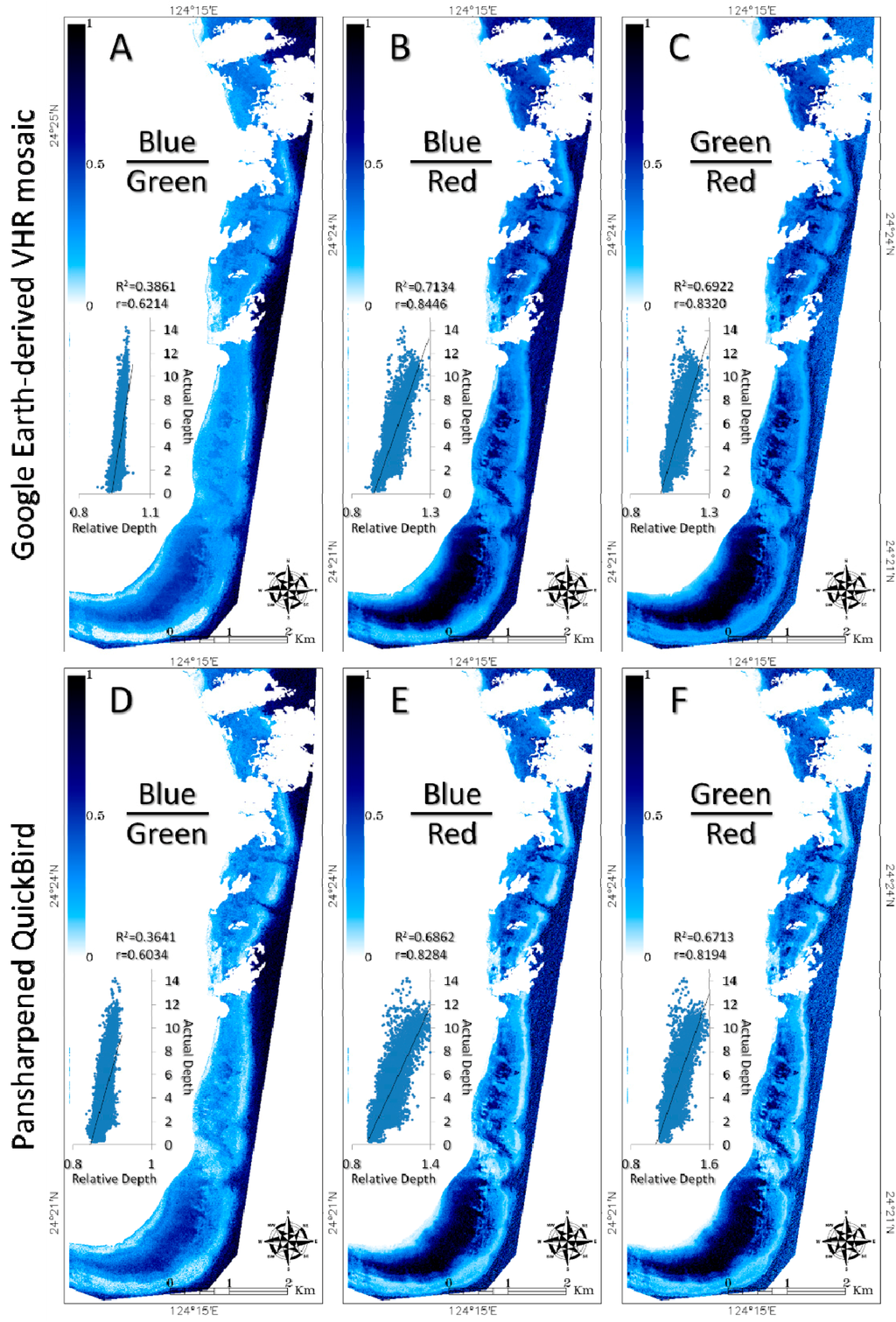
با استفاده از تبدیل نسبت کالیبره نشده، سه مدل عمق نسبی دیجیتال (DRDM) برای هر دو موزاییک با وضوح بسیار بالا (VHR) مشتق از Google Earth (GE) و تصاویر پانشارپن QuickBird (QB) تولید شد ( شکل 6 ). برای هر دو مجموعه داده، تبدیلهای نسبت شامل باندهای طیفی آبی و قرمز (نگاه کنید به شکل 6 B,E) دقیقاً توسط ترکیب سبز-قرمز دنبال شد ( شکل 6 C,F را ببینید) و معیارهای رضایتبخشی از توافق بین مدلسازی شده و واقعی را ارائه کرد. عمق آب ( R2 ≈ 0.69). جالب توجه است که ترکیب آبی-قرمز (دقیق ترین) به معیارهای توافق بالاتری برای GE در مقایسه با QB ( R2 GE = 0.7134 در مقابل R رسیده است.2 QB = 0.6862، Z = 6.29، α دو دم < 0.002). این تفاوت عملکرد بین GE و QB به طور سیستماتیک به نفع GE در سه تبدیل نسبت رخ داد ( جدول 2 ). برای هر دو مجموعه داده، DRDM آبی-قرمز به یک مدل عمق دیجیتال (DDM) با استفاده از مدل برازش خطی (مرتبط با مقدار R2 نشاندادهشده در شکل 6 B ,E) کالیبره شد تا آزمایش کند که آیا نقشهبرداری بستر دریا تا چه اندازه است. ممکن است با ادغام باندهای DDM به RGB بهبود یابد.
شکل 6. مدلهای عمق نسبی دیجیتال (DRDM) حاصل از تبدیل نسبت بر اساس باندهای طیفی آبی-سبز، آبی-قرمز و سبز-قرمز مشتق شده از ( به ترتیب A ، B و C ) تصاویر موزاییکی با وضوح بسیار بالا مشتق شده از Google Earth و ( به ترتیب D ، E و F ) تصاویر QuickBird را تیز کردند. نمودارهای پراکندگی اعماق نسبی و واقعی و همچنین ضریب تعیین خطی ( R2 ) و ضریب همبستگی محصول-لمان پیرسون ( r ) برای هر DRDM تعبیه شده است.
جدول 2. گردآوری مقادیر Z بین سه مدل عمق نسبی دیجیتال با توجه به موزاییک با وضوح بسیار بالا و تصاویر شفاف QuickBird که از Google Earth مشتق شده است.
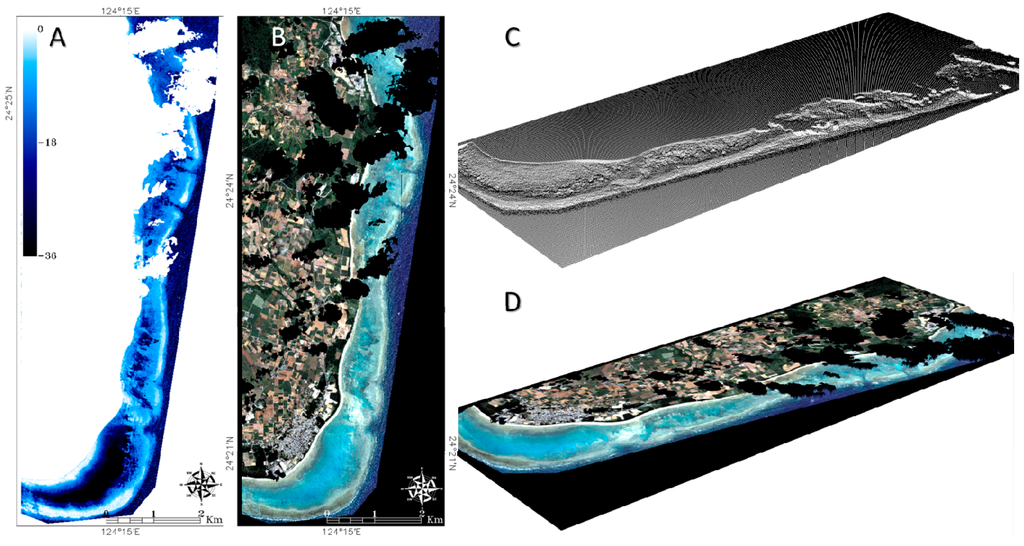
با تقلید از شکل 5 مربوط به ارتفاع ، DDM کالیبره شده ( شکل 7 الف) ممکن است برای ایجاد یک ابر نقطه سه بعدی ( شکل 7 C) مورد سوء استفاده قرار گیرد که تصویر رنگ طبیعی GE ( شکل 7 B) روی آن قرار گیرد ( شکل 7 D) ).
شکل 7. نقشههای ( A ) عمق آب و ( B ) دادههای رنگ طبیعی (RGB) بر روی سایت مورد مطالعه که به ترتیب از تبدیل نسبت آبی قرمز Google Earth (GE) و موزاییک با وضوح بسیار بالا مشتق شده از GE ناشی میشوند. بر اساس دادههای xyz، ( C ) یک ابر نقطه سهبعدی ساخته شد که میتوان تصویر RGB را روی آن قرار داد ( D ).
3.2. مقایسه نقشه پوشش بستر دریا
بخش دریایی منطقه مورد مطالعه به 15 کلاس برای هر دو موزاییک VHR مشتق شده از GE و تصاویر QB pansharpened طبقه بندی شد که فاقد و ارائه DDM مرتبط بودند ( شکل 8 ). دقتهای کلی رضایتبخش تا بسیار رضایتبخش (OA) از 80٪ تا 90٪ برای همه مجموعه دادهها یافت شد، و نقشههای بستر دریا به دست آمده از GE بهتر از آنهایی که از QB ناشی میشوند (OA GE = 89.70٪ در مقابل ) با دادههای اعتبارسنجی مطابقت داشتند. OA QB = 80.40٪، Z = 4.10، α دو دم < 0.002). اگرچه نگاشت مشتق شده از جنرال الکتریک هیچ UA و یک PA منفرد زیر 60% را نشان نداد ( یعنی PA Seagrass= 57.58٪، دقت های مرتبط با QB زیر 60٪ شامل دو UA (UA Seagrass = 58.33٪ و UA Blue coral = 55.56٪) و دو PA، که از این میان علف دریایی عملکرد بسیار پایینی داشت (PA Hard coral bommie = 54.55٪ و PA Seagrass = 21.21٪ ( جدول 3 ). از جمله دادههای عمق آب با مجموعه دادههای RGB، OA مشتق از GE (OA GE = 89.70٪) را تغییر نداد و OA مشتقشده از QB را اندکی، اما به طور ناچیز بهبود داد (از OA QB = 80.40٪ به OA QB_DDM = 81.21٪، Z. = 0.32، α دو دم= 0.749). علیرغم OA بدون تغییر، اطلاعات عمق آب در بین UA و PA مشتق از GE جایگشت هایی ایجاد کرد که برای علف دریایی (PA = +15.15٪) و هر سه کلاس مرجانی (PA Hard coral bommie = +18.18٪، UA Hard ) مفید بود. بیشه مرجانی = +15.25٪، UA مرجان آبی = +10.88٪ و مضر برای گل (PA = -15.15٪) و مرجان آبی (UA = -10.22٪). به نظر میرسد که بهبود متوسط نقشهبرداری QB با گنجاندن دادههای عمق آب تا حدی با افزایش تبعیض علفدریایی (UA = +11.67٪) و همچنین تمایز سنگریزه (PA = +9.09٪ و UA = +9.02٪) منعکس شده است.
شکل 8. نقشههای پوشش بستر دریا (15 کلاس) که از موزاییک با وضوح بسیار بالا ( A ) مشتق شده از Google Earth بدون و ( B ) با یک مدل عمق دیجیتال ذاتی (DDM) و از تصاویر تیز شده QuickBird ( C ) بدون و ( D ) با DDM ذاتی. برای هر نقشه، دقت کلی (OA) و ضریب کاپا (κ) اضافه شده است.
جدول 3. دقت تولیدکننده (PA) و دقت کاربر (UA) 15 نوع پوشش بستر دریا با توجه به موزاییک با وضوح بسیار بالا برگرفته از RGB Google Earth، مجموعه دادههای شفاف شده QuickBird و مدل عمق دیجیتال (DDM).
3.3. مقایسه نقشه برداری پوشش زمین
بخش زمین از منطقه ساحلی به 11 کلاس برای هر دو موزاییک VHR مشتق شده از GE و تصاویر QB شفاف شده که فاقد و ارائه شده با DEM مرتبط بودند طبقه بندی شد ( شکل 9 ). در سراسر روشهای باند، 11 ویژگی هدفمند از طبقهبندی موفقی بهرهمند شدند که بالاترین دهکهای هر دو معیار توافق را در بر میگرفت. یک بار دیگر، نقشههای زمین مبتنی بر GE نتایج بهتری نسبت به نقشههای مبتنی بر QB تولید کردند (OA GE = 95.32٪ در مقابل OA QB = 88.71٪، Z = 3.28، α دو دنباله <0.002). بر خلاف مجموعه داده GE RGB، مجموعه داده QB نشان داد که شش UA و PA کمتر از 84٪ عملکرد داشتند که یکی از آنها به 48.48٪ رسید ( جنگل حرا PA) ( جدول 4 ). ترکیب اطلاعات ارتفاع و مجموعه دادههای RGB به طور قابلتوجهی دقت طبقهبندی GE و QB را به میزان 3.85% افزایش داد (OA GE_DEM = 99.17٪، Z = 3.17، α دو دنباله <0.002) و 9.09٪ (OA QB_DEM = 97.80٪، Z = 8.8). ، α دو دم < 0.002)، به ترتیب. گنجاندن ارتفاع برای زیرساخت های انسانی نقشه برداری شده توسط GE مفید بود ( سقف PA = +12.12٪ و جاده UA= +11.35٪ و به طور قابل توجهی تمایز جنگل حرا مربوط به QB (PA = +51.52٪ و UA = +30.29٪)، جنگل تاریک (PA = +21.21٪ و UA = +23.53٪)، جاده (UA) را بهبود بخشید. = +17.2٪ و رودخانه (UA = +13.89٪).
شکل 9. نقشههای پوشش زمین (11 کلاس) حاصل از موزاییک با وضوح بسیار بالا ( A ) بدون و ( B ) به دست آمده از Google Earth با یک مدل ارتفاع دیجیتال ذاتی (DEM) و از تصاویر تیز شده QuickBird ( C ) بدون و ( د ) با یک DEM ذاتی. برای هر نقشه، دقت کلی (OA) و ضریب کاپا (κ) اضافه شده است.
جدول 4. دقت تولیدکننده (PA) و دقت کاربر (UA) از 11 نوع پوشش زمین با توجه به موزاییک با وضوح بسیار بالا برگرفته از RGB Google Earth، مجموعه دادههای شفاف شده QuickBird و مدل ارتفاعی دیجیتال (DEM).
4. بحث
4.1. عمق کم آب ساحلی
هر دو بازیابی عمق آب مبتنی بر GE و QB در مناطق دریایی Shiraho در محدوده 0-15 متر به اندازهگیری رضایتبخشی از توافق با بررسی صوتی ( R2 ≈ 0.7) رسیدند. قابل توجه است که بررسی صداگذاری در امتداد تالاب و نه در امتداد صخره بیرونی عمیق تر رخ داده است (خطوط زرد را در شکل 4 C ببینید). علاوه بر این، پوشش بررسی شامل برخی از خطوط کنار ساحلی بود که ممکن است دقت عمق آب را در اضافه وزن برخی محدودههای عمق آب اغراق کند. با این حال، اندازهگیری توافق، کارهای تحقیقاتی را با استفاده از دادههای فضایی چندطیفی VHR و حسگر هشت باند WorldView-2 تأیید میکند [ 30 ، 32]. صرف نظر از منبع داده، بهترین استخراج عمق آب از ترکیب نوارهای آبی و قرمز و به میزان کمتری توسط نوارهای سبز و قرمز به دست آمد. این نتیجه ممکن است با تفاوت در جذب نور توسط آب توضیح داده شود [ 33 ]. اگرچه تفاوت در ضرایب جذب آبی و سبز تقریباً 0.045 (= 0.065-0.02) است، تفاوت های مربوط به هر دو ضرایب آبی-قرمز و سبز-قرمز به 0.35 (= 0.37-0.02) و 0.305 (= 0.37-0.37) می رسد. ، به ترتیب [ 33]؛ تفاوتهای بیشتر باعث ایجاد تمایز ظریفتری در محدوده کامل اعماق آب میشود. کمبود قابل توجهی در نمودارهای جهانی عمق آب در مناطق ساحلی وجود دارد، زیرا کم عمق بودن آنها مانع استفاده از بررسی های سنتی در آب می شود. بازیابی عمق آب رضایتبخش بهدستآمده از ترکیبی از یک بررسی صوتی و یک مجوز حرفهای جنرال الکتریک، نوید بزرگی برای ارائه اعماق آب ایمن در مقیاس زیرمتر در گسترههای محلی و منطقهای دارد. به عنوان بازتابی از همکاری هم افزایی بین محققان جنگل و دانشمندان GE [ 34 ]، استفاده از روش توصیف شده در این مقاله در مناطق ساحلی با اعمال نفوذ داده های GE VHR برای کمک به محققان و سهامداران در پرداختن به مسائل فوری ساحلی بسیار مرتبط است.
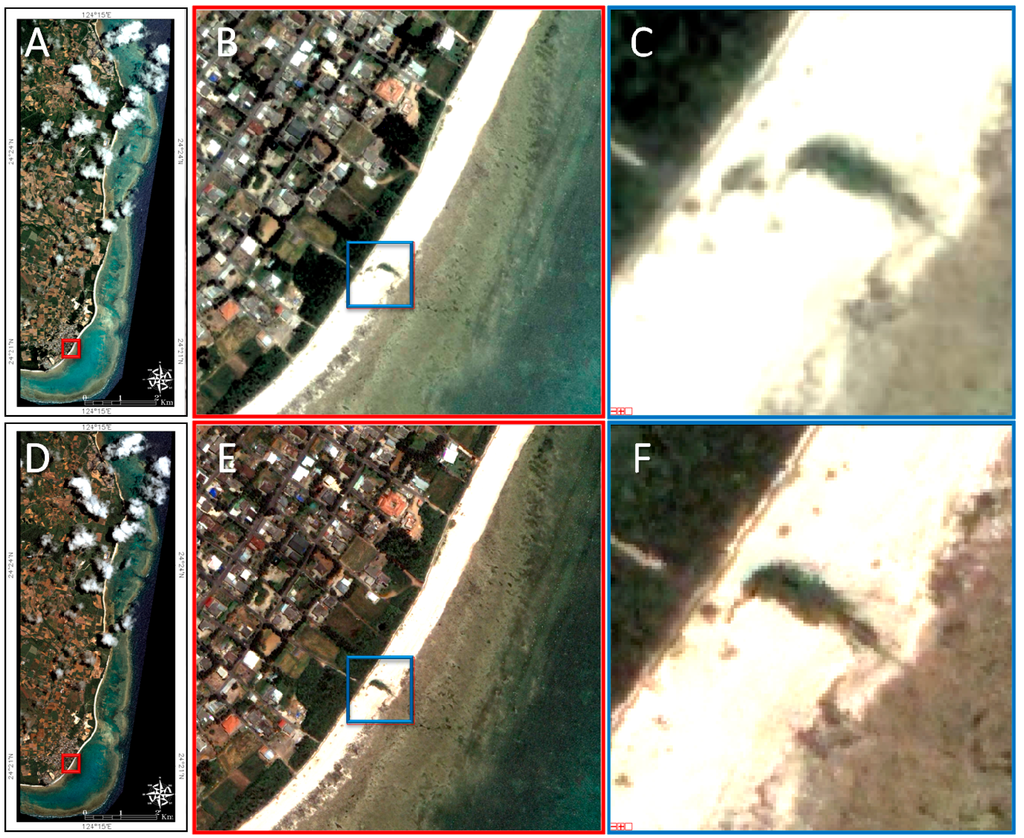
بر اساس یک نمونه برداری قابل توجه (N GE = 22,478 و N QB = 22,481)، همه معیارهای دقت به طور قابل توجهی متمایز بودند (α دو دنباله < 0.002)، و سه DRDM مبتنی بر GE به طور قابل ملاحظه ای بهتر از QB بودند ( شکل را ببینید). 6 و جدول 2). این یافتههای اصلی شگفتانگیز هستند، زیرا موزاییک VHR مشتقشده از GE از دادههای QB که دقیقاً در همان زمان و مکان ارائه شدهاند، منشأ میگیرد. ما قبلاً نشان دادیم که تفاوتهای قابلتوجه بین دو مجموعه داده ناشی از یک واگرایی در تکنیک پردازش تصویر، مانند روش pansharpening، تکنیک شبیهسازی تصویر، مانند تبدیل فرمت JPEG، یا ترکیبی از هر دو عامل است. بررسی بصری هر دو مجموعه داده در بالاترین وضوح، جدایی در بافت تصویر را نشان می دهد ( شکل 10 ). اگرچه ما روش نمونهگیری مجدد را برای ایجاد صافترین نتایج به کار بردیم (پیچیدگی مکعبی، نگاه کنید به [ 14]) در روش پانشارپنینگ QB، تغییر مقادیر پیکسل جنرال الکتریک با فاصله آشکارا فاقد فرکانس فضایی بالا در مقایسه با QB است. بنابراین، منطقی است که فرض کنیم دانشمندان جنرال الکتریک یک الگوریتم pansharpening سفارشی را برای تصاویر QB اعمال کرده اند و تصاویر را در قالب فایل های JPEG جذب کرده اند تا تصاویر VHR خروجی نرم تری به دست آورند و این تصویر صاف تر با دقت فضایی بررسی صوتی مطابقت بیشتری دارد. به عنوان مثال، دقت افقی GPS). سایر روشهای تیز کردن طیفی، مانند الگوریتمهای Color Normalized یا Principal Component، باید برای روشن شدن محصولات GE آزمایش شوند.
شکل 10. تصاویر با رنگ طبیعی (RGB) از کل منطقه مورد مطالعه، بزرگنمایی مربع قرمز و بزرگنمایی مربع آبی که از موزاییک با وضوح بسیار بالا ( به ترتیب A ، B و C ) مشتق شده از Google Earth ( به ترتیب A، B و C) و از QuickBird تیز شده ناشی می شود. تصاویر ( به ترتیب D ، E و F ).
4.2. نقشه برداری بدون درز بستر دریا و پوشش زمین
منطقه ساحلی با موفقیت به روشی یکپارچه در VHR توسط هر دو مجموعه داده GE و QB ترسیم شد، با تقریباً 26 نوع پوشش که با کمترین OA برابر با 80.40٪ ( به عنوان مثال ، OA QB_Seabed ) حل و فصل شده و مشخص شد.). دقت طبقهبندی بسیار بالا باید بر اساس نزدیکی پیکسلهای حقیقت زمینی در نظر گرفته شود. اگرچه به صورت تصادفی نمونهبرداری شده است، پیکسلهای آموزشی و اعتبارسنجی ممکن است از یک همبستگی خودکار فضایی رنج ببرند، که احتمالاً دقت را بیش از حد برآورد میکند. هر دو مجموعه داده از سه نوار آبی، سبز و قرمز (باند مادون قرمز حذف شد) تشکیل شدهاند و اطلاعات طیفی به اندازه کافی غنی را در بر میگرفتند تا ویژگیهای پوشش اولیه را در یک محیط پیچیده فضایی متمایز کنند. مطابق با نتایج عمق آب، یافتههای مربوط به دقت طبقهبندی نشان داد که مجموعه دادههای جنرال الکتریک نقشههای پوشش ساحلی قابل اعتمادتری را برای قلمروهای دریایی و زمینی نسبت به مجموعه دادههای QB تولید میکند. به طور خاص، bommie مرجانی سخت، مرجان آبی، جنگلهای تاریک و حرا بر اساس دادههای GE بسیار بهتر از دادههای QB طبقهبندی شدند. با پیشفرض تصویر بافت نرمتر مبتنی بر جنرال الکتریک، میتوانیم فرض کنیم که تصاویر QB تیز شده دارای بافتی به اندازه کافی واضح است که درخشش خورشید بر روی کلنیهای مرجانی بسیار کمعمق و لکههای ناشی از برگ روی سایبانهای متراکم درختان مانع از طبقهبندی قوی میشود.
ادغام دادههای ارتفاع آزادانه در دسترس در مجموعه دادههای RGB GE و QB بهطور قابلتوجهی دقت طبقهبندی پوشش زمین را بهترتیب برای (1) زیرساختهای انسانی، (2) جنگلهای تاریک و حرا و تا حدی جادهها و رودخانهها افزایش داد. GDEM از حسگر استریوسکوپی ASTER مشتق شده است که مناظر سه بعدی را که شامل ویژگی های پوششی هستند، ثبت و ارائه می کند [ 35 ]]. در نتیجه، GDEM بالای زیرساخت های انسانی و سایبان درختان را ترسیم می کند، که سازگاری بیشتر طبقه بندی برای انواع پوشش زمین نشان داده شده در مطالعه ما را توضیح می دهد. علیرغم وضوح فضایی اولیه یک ثانیه قوسی، توصیه میکنیم دادههای ارتفاعی تودرتوی GDEM را که در VHR مناسب با موزاییک مشتقشده از RGB GE شطرنجی شدهاند، ترکیب کنید تا نقشهبرداری پوشش زمین بهینه شود. با این حال، شامل اطلاعات عمق آب بازیابی شده از مجموعه داده های RGB به هر یک از مجموعه داده ها، نقشه برداری پوشش دریایی را به طور قابل توجهی بهبود نمی بخشد. این نتیجه ممکن است با عدم وجود اصلاح ستون آب برای محاسبه نور RGB توسط آب توضیح داده شود، که به طور پیچیده با عمق آب مرتبط است.
4.3. محدودیت ها
روش توسعه و بحث شده در این مطالعه دارای محدودیتهای محاسباتی، نوری و دادهای است.
محدوده مورد مطالعه 44 کیلومتر مربع بود و به 39 فایل جداگانه JPEG Premium نیاز داشت که کمی کمتر از یک تصویر در هر کیلومتر مربع بود . پس از طراحی یک طرح اکتساب موقت که ممکن است با تجسم دائمی روی GE ساخته شود (به عنوان مثال، خطوط شبکه 1 کیلومتر)، مجموعه استاندارد شده (به بخش 2.2 مراجعه کنید ) از 39 تصویر ممکن است نسبتا آسان و سریع باشد. چالش اصلی در تکمیل موزاییک است که به طور پیچیده ای با قابلیت های مشترک نرم افزار و پردازنده ذاتی مرتبط است. مدیریت یک منطقه ساحلی بیشتر از 50 تا 100 کیلومتر مربعبنابراین در VHR بیشتر به تلاشهای محاسباتی برای دستیابی به یک موزاییک (بسیار) بزرگ متکی است تا مجموعهای از تصاویر. یک راه حل برای این معضل این است که تعداد تصاویری را که باید موزاییک شوند حفظ کنید، اما تصاویر را در ارتفاعات چشمی بالاتر از جنرال الکتریک جمع آوری کنید تا میدان دید افزایش یابد، که به موزاییک اجازه می دهد مناطقی در حدود صدها کیلومتر را پوشش دهد. 2 . پل زدن مقادیر ارتفاع چشم GE با اندازه پیکسل های چند طیفی و پانکروماتیک ابزارهای VHR و HR هدفی است که در حال حاضر به آن پرداخته شده است.
این مطالعه به طور مستقیم و غیرمستقیم نتایج نگاشت به دست آمده از QB را از طریق فیلتر GE مقایسه می کند. باند مادون قرمز به خاطر مقایسه از QB خریداری شده حذف شد. به دلیل انعکاس و جذب قابل توجه نور مادون قرمز توسط پوشش گیاهی و آب، به ترتیب، قدرت تمایز QB در پوشش خشکی مستعد افزایش است، اما در پوشش بستر دریا بسیار کم است. وضوح رادیومتری QB خریداری شده در 8 بیت برای موازی کردن تصاویر GE تبدیل شده به JPEG نمونه برداری شد. این فرآیند تفسیر نتایج را تسهیل کرد. با این وجود، سنسورهای QB و VHR جدید (به بخش 2.2 مراجعه کنید) داده های مکانی را با وضوح رادیومتری 11 بیتی ارائه می دهد. به دلیل افزایش نمایی در محدوده دینامیکی (از 256 تا 2048 عدد دیجیتال در هر باند طیفی)، عملکرد نقشه برداری تصاویر خریداری شده احتمالا افزایش می یابد. برتری مستند GE بر تصاویر 8 بیتی منبع، که در این مقاله نشان داده شد، باید در برابر تصاویر 11 بیتی بررسی شود. برخلاف QB، تصاویر جنرال الکتریک مبتنی بر اعداد دیجیتال از ابردادهها بهره نمیبرند که به تصاویر امکان کالیبرهسازی رادیومتری و تصحیح جوی را میدهد. این کمبود ممکن است به طور جدی مانع یا به خطر انداختن عمق آب و نقشه برداری پوششی بر روی مناطقی که به عنوان مثال با سطح بالایی از تبخیر مشخص می شوند. مقابله با این کمبود اطلاعات با استفاده از فراداده های آنلاین آزادانه در دسترس، یک تحقیق حیاتی در حال انجام است، همانطور که در بخش 4.2 برانگیخته شد..
منطقه ساحلی Shiraho واقع در امتداد منطقه جنوب شرقی جزیره Ishigaki یک منطقه ساحلی به خوبی مطالعه شده (عمدتا به دلیل صخره های مرجانی آن) در ژاپن را در خود جای داده است و میزبان تعداد زیادی از محققان است که می توانند تصاویر VHR تجاری را تهیه کنند. در نتیجه، DigitalGlobe جمع آوری تصاویر را در منطقه Shiraho برنامه ریزی کرده است که اکنون از پنج تصویر VHR از سال 2007 تا 2012 استفاده می کند که در GE در دسترس هستند. در دسترس بودن تصاویر VHR ارتباط نزدیکی با تلاش ارائه دهنده در به دست آوردن داده دارد که به نوبه خود به توانایی مشتری در پرداخت هزینه برای چنین تصاویری بستگی دارد. این ادعا با مطالعه دقت موقعیت افقی در 109 شهر در سراسر جهان مطابقت دارد، که تفاوت معنی داری را بین کشورهای توسعه یافته و در حال توسعه به هزینه دومی نشان داد [ 21 ].]. قبل از انتخاب یک منطقه مورد مطالعه برای تجزیه و تحلیل با روش ما، اکیداً توصیه می شود که با تصاویر تاریخی GE مشورت کنید تا به تعیین امکان سنجی مطالعات در مورد پویایی چشم انداز ساحلی کمک کنید. PA بسیار پایین مربوط به طبقه بندی علف های دریایی ممکن است برخی از بازجویی ها را در مورد اثر زمستان و تابستان برانگیزد. بنابراین ما میخواهیم توجه را به فصلی بودن بالقوه جلب کنیم که احتمالاً دقت طبقهبندی برخی از زیستگاهها، بهویژه آنهایی که با کلروفیل ارائه میشوند، سوگیری میکند.
5. نتیجه گیری ها
با تمرکز بر منطقه ساحلی بدون درز Shiraho (Ishigaki، ژاپن)، متوجه شدیم که هم تصاویر موزاییکی مشتق شده از RGB GE و هم تصاویر QB شفاف شده RGB نتایج رضایتبخش تا بسیار رضایتبخشی را برای عمق آب به دست آوردند ( R2 GE = 0.71 و R2 QB = 0.69)، پوشش بستر دریا (OA GE = 89.70٪ و OA QB = 80.40٪، n = 15 کلاس) و پوشش زمین (OA GE = 95.32٪ و OA QB = 88.71٪، n = 11 کلاس) نقشه برداری. علاوه بر این، ما برای اولین بار نشان دادیم که مجموعه داده GE به طور قابل توجهی از مجموعه داده های QB برای هر سه نقشه برداری ( Z عمق آب ) بهتر عمل کرد.= 6.29، Z بستر دریا = 4.10، Z Land = 3.28، α دو دم < 0.002). ادغام داده های ارتفاع آزاد (GDEM) در هر دو مجموعه داده RGB به طور قابل توجهی دقت طبقه بندی پوشش زمین (OA GE = 99.17٪ و OA QB = 97.80٪) را در مقایسه با عمق آب بهبود داد. به دلیل روششناسی انتقال آسان مرتبط که در این مقاله توضیح داده شده است، دادههای GE ممکن است یک جایگزین ارزان برای محققان و سهامدارانی باشد که وظیفه مدیریت ساحلی در مناطق ساحلی در سراسر جهان را دارند که با پوشش VHR ارائه میشوند.








بدون نظر