

خلاصه
استفاده از فن آوری های حسگر یک روش استاندارد در حوزه کشاورزی دقیق است. تنوع سیستمهای حسگر، واحدهای کنترل و نرمافزارهای پردازشی خاص فروشنده، منجر به افزایش تلاشها در ایجاد شبکههای حسگر متقابل و زیرساختهای استاندارد داده حسگر شده است. این مطالعه از نرمافزار منبع باز استفاده میکند و استانداردهای کنسرسیوم فضایی باز را برای معرفی روشی برای تحقق زیرساخت دادههای حسگر برای کاربردهای کشاورزی دقیق تطبیق میدهد. این زیرساخت کنترل سیستمهای حسگر، دسترسی به دادههای حسگر، انتقال دادههای حسگر به سرویسهای وب و ذخیره استاندارد دادههای حسگر در یک سرور مبتنی بر وب حسگر را پوشش میدهد. این به کاربران نهایی و سیستمهای رایانهای اجازه میدهد تا به دادههای حسگر به روشی کاملاً تعریف شده دسترسی داشته باشند و برنامههایی را در بالای خدمات وب حسگر بسازند. زیرساخت برای سناریوهای بزرگ مقیاس پذیر است، که در آن تعداد زیادی از سیستم های حسگر و خدمات وب حسگر درگیر هستند. یک آزمایش میدانی در دنیای واقعی برای اثبات کاربردی بودن زیرساخت راه اندازی شد.
فعال سازی وب سنسور ; کنسرسیوم فضایی باز کشاورزی دقیق ; قابلیت همکاری منبع باز ؛ 52 درجه شمالی _ سنسور ؛ UAS ; سرویس وب
1. معرفی
امروزه استفاده از فناوری های حسگر در کشاورزی بیشتر و بیشتر کاربرد دارد. در حوزه کشاورزی دقیق (PF)، این یک کمک اجتناب ناپذیر برای تولید اطلاعات مکانی و زمانی خاص مکان برای حمایت از استراتژی های مدیریت محصول است [ 1-3 ] . در دهه گذشته، چندین شرکت ساخت و ساز ماشینآلات کشاورزی و حسگر، سیستمهای حسگر زیادی را برای سنجش پارامترهای مربوط به خاک و گیاه، و همچنین برای سنجش عوامل تأثیرگذار بر محیطزیست ایجاد کردهاند که بر توسعه گیاهان زراعی تأثیر میگذارند [ 3 ]. اکثر این سیستم های حسگر برای موارد زیر طراحی شده اند: (1) استفاده ثابت، به عنوان مثال، شبکه های سنجش رطوبت خاک [ 4 ، 5 ]]؛ (ب) استفاده دستی، به عنوان مثال، سنسورهای انعکاس فلورسانس و فوق طیفی [ 6 ]. یا (iii) استفاده از موبایل در سکوهای حسگر زمینی، به عنوان مثال، سنسورهای فلورسانس، بازتاب فراطیفی و سنسورهای اولتراسونیک، که بر روی تراکتورها نصب میشوند [ 7-10 ] . توسعه اخیر امکان (IV) استفاده از تلفن همراه را بر روی سکوهای حسگر هوایی، به عنوان مثال، سیستم های دوربین، که بر روی وسایل نقلیه هوایی بدون سرنشین (UAVs) یا سیستم های هواپیمای بدون سرنشین (UASs) نصب شده اند، اضافه کرده است [ 11-13 ] .
اکثر این سیستمهای حسگر با واحدهای کنترل خاص فروشنده، رابطهای کاربر و پروتکلهای ارتباطی کار میکنند. از آنجایی که این از سیستم حسگر به سیستم حسگر دیگر متفاوت است، استفاده از حسگرهای فروشندگان مختلف ممکن است به سرعت به رویههای پیچیده، ناسازگار و زمانبر برای ذخیره، پردازش و توزیع دادههای حسگر منجر شود. علاوه بر این، بسیاری از سیستمهای حسگر در سیستمهای پشتیبانی تصمیم برای برنامههای آنلاین و آفلاین مخصوص سایت یکپارچه شدهاند و در پایانههای تراکتور پیادهسازی میشوند، به عنوان مثال، Yara N-Sensor (Yara International ASA، آلمان) و GreenSeeker (NTech Industries Inc., Ukiah). ، کالیفرنیا، ایالات متحده آمریکا). دسترسی به دادههای خام در همه شرایط تضمین نمیشود و کاربران معمولاً برای بازیابی و تجزیه و تحلیل اندازهگیریهای حسگر جمعآوریشده به روالهای پردازش خاص فروشنده ملزم هستند.
برای غلبه بر این فقدان رویه های استاندارد شده برای کنترل و دسترسی حسگر، و همچنین برای رمزگذاری و توزیع داده های حسگر، نش و همکاران. [ 14 ] پیشنهاد می کند از استانداردهای ابتکارات کنسرسیوم فضایی باز (OGC) برای خودکارسازی پردازش داده های حسگر کشاورزی استفاده شود. ابتکار OGC Sensor Web Enablement (SWE) شکاف بین حسگرها و برنامه های کاربردی پردازش را پر می کند و مجموعه ای از استانداردها را فراهم می کند «[…] برای فعال کردن همه انواع حسگرها، ابزارها و دستگاه های تصویربرداری قابل دسترسی به وب و/یا اینترنت در دسترس و قابل دسترسی باشند. ، در صورت لزوم، قابل کنترل از طریق وب» [ 15 ]. این شامل چندین تعاریف از “داده های مرتبط با حسگر به روشی خود توصیفی و فعال معنایی” است [ 16 ]]. بنابراین، SWE می تواند به عنوان پایه ای برای وب حسگر، زیرساختی که معماری زیربنایی، مکانیسم های ارتباطی شبکه و سخت افزار حسگر ناهمگن را از برنامه های ساخته شده در بالا پنهان می کند، استفاده شود [ 17 ]. اگرچه بیشتر تحققهای یک وب حسگر در زمینههای تحقیقاتی دیگر و برای سناریوهای در مقیاس بزرگ، به عنوان مثال، بلایای نشت نفت [ 18 ]، مدیریت سیل [ 19 ] یا مدیریت ریسک عمومی [ 20 ] سرچشمه میگیرد، مطالعات اخیر سازگاری برای کشاورزی را ثابت کرده است. دامنه، که در زمینههای حتی کوچکتر عمل میکند [ 21 ].
اولین پیاده سازی برای شبکه های حسگر بی سیم ثابت (WSN) پتانسیل این ایده را برای کشاورزی دقیق ثابت کرد. برخی از محققین مفاهیم بهبود یافته ای را برای فرآیندهای تصمیم گیری در کشاورزی با اتصال WSN ها با سرویس های وب به عنوان بخشی از زیرساخت داده های مکانی (SDI)، بر اساس مشخصات SWE توصیف می کنند [ 22-24 ] . سایر محققان برنامه هایی را بر اساس این خدمات وب توسعه دادند، به عنوان مثال، برای عملیات پاشش آنلاین، با استفاده از یک سرویس ویژگی وب (WFS) در حال پرواز [ 25 ]]. شبکههای حسگر فعلی با داشتن امکانات فراوان برای ترکیب سیستمهای حسگر ثابت و متحرک، زمینی و هوایی و همچنین سیستمهای حسگر موقت و دائمی، پیچیدهتر و پیچیدهتر شدهاند. در نتیجه، اتصال سیستمهای حسگر و کل شبکههای حسگر با یک وب حسگر باید تا حد امکان انعطافپذیر باشد تا ادغام دادههای حسگر در سرویسها و برنامههای کاربردی وب تسهیل شود.
این مطالعه یک روش ساده اما مؤثر برای جاسازی سیستمهای حسگر مختلف در رویکرد وب حسگر ارائه میکند، و دادههای آنها را برای برنامههای کاربردی با استفاده از استانداردهای تعریفشده و قابل تعامل چارچوب ابتکاری OGC SWE در دسترس قرار میدهد. ایده ایجاد این روش از آزمایشهای میدانی مختلف سرچشمه میگیرد که در ایستگاههای تحقیقات کشاورزی دانشگاه هوهنهایم، اشتوتگارت، آلمان انجام شد. بسیاری از این آزمایشها شامل اندازهگیری حسگر هستند، اما فاقد یک جریان کار کلی با مکانیسمهای استاندارد شده برای کنترل و دسترسی حسگرها، و همچنین ذخیره و پردازش دادههای آنها هستند. نویسندگان نحوه استفاده از نرم افزار منبع باز ارائه شده توسط 52 ° North Initiative for Geospatial Open Source Software GmbH (52 ° ) را نشان می دهند.N)، و آن را با نیازهای PF تطبیق دهید. یک محیط آزمایشی میدانی برای تأیید روش در یک سناریوی مورد استفاده واقعی برای پذیرش SWE برای سنجش PF تنظیم شد.
2. مواد و روشها
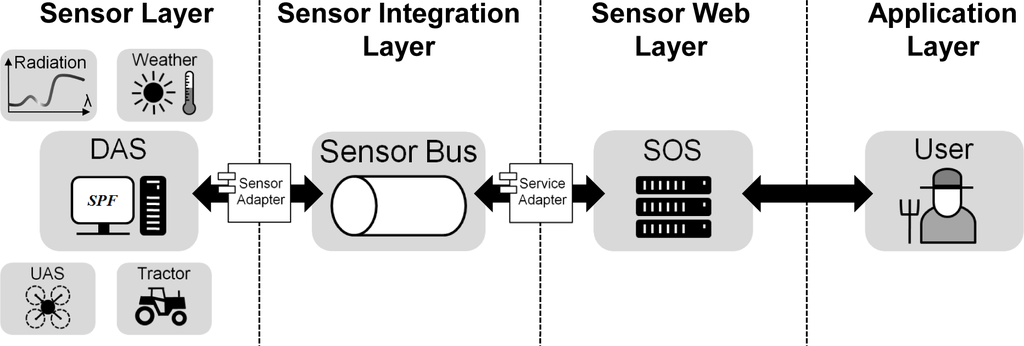
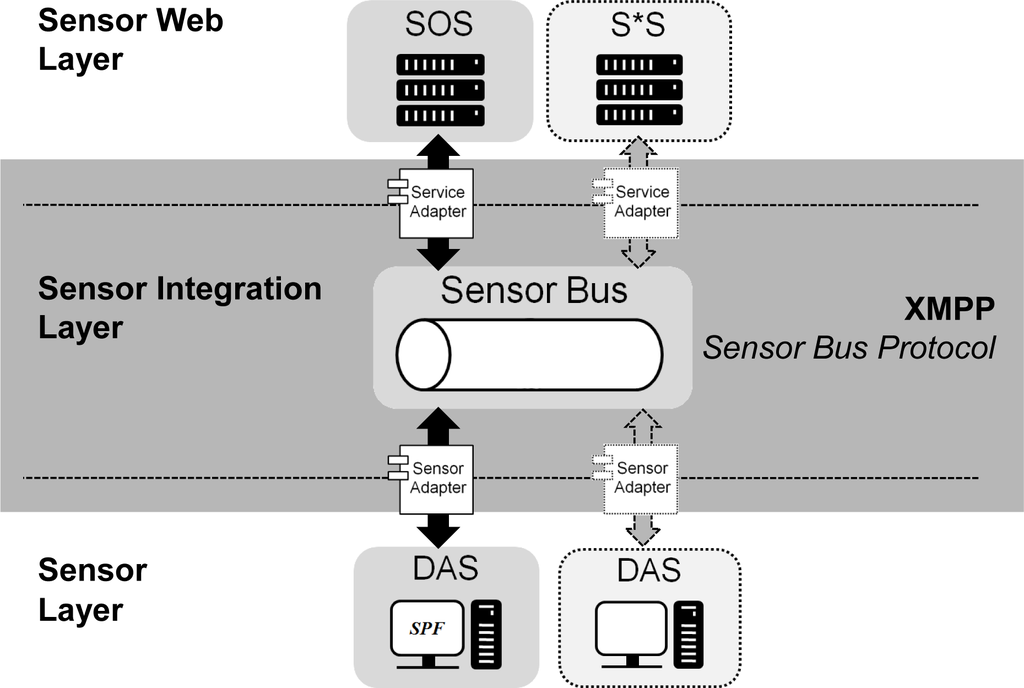
این بخش اطلاعات پس زمینه ای در مورد اصول و اجرای یک زیرساخت واقعی حسگر کشاورزی ارائه می دهد. تمرکز بر انتشار دادههای حسگر بر روی یک زیرساخت SWE توزیعشده از راه دور و قابل دسترس کردن آن برای محققان و برنامههای کاربردی کاربر به روشی کاملاً تعریف شده بود. زیرساخت حسگر این مطالعه بر اساس توصیه های Bröring و همکاران بود. [ 18 ]، که اجرای یک پشته زیرساخت حسگر توسعه یافته را توصیف کرد. پشته زیرساخت در شکل 1 نشان داده شده است و در ادامه توضیح داده خواهد شد.
پشته زیرساخت حسگر توسعه یافته مبتنی بر سه لایه اصلی و یک لایه یکپارچه است که همه سطوح از اندازهگیری حسگر تا کاربردهای کاربر نهایی را پوشش میدهد. لایه حسگر پایین ترین لایه است که ارتباطات درون شبکه های حسگر را مدیریت می کند. این شامل دستگاه های حسگر مختلف و یک یا چند سیستم جمع آوری داده (DAS) برای کنترل و دسترسی به تمام سیستم های حسگر در حال پرواز است. لایه ادغام حسگر یک لایه میانی بین سنسورها و خدمات SWE است. ایده آن ایجاد زیرساختی است که سرویسهای وب حسگر را به هم متصل میکند، دادههای حسگر خاص را درخواست میکند، با حسگرها، دقیقاً دادههای درخواستی را در لحظه تحویل میدهد [ 26 ]]. لایه وب حسگر از یک یا تعداد زیادی سرویس SWE تشکیل شده است. هر سرویس برای اهداف خاصی تعریف شده است، به عنوان مثال، سرویس رویداد حسگر (SES)، که یک رابط وب را برای انتشار و اشتراک در اعلانهای حسگرها ارائه میکند [ 27 ]، یا سرویس مشاهده حسگر (SOS)، که کشف و بازیابی را ارائه میکند. دادههای بیدرنگ یا آرشیو شده، تولید شده توسط هر نوع سیستم حسگر [ 28 ]. لایه برنامه بالاترین لایه است که در آن کاربران یا سیستم های کامپیوتری با سرویس های SWE تعامل دارند.
این مطالعه زیرساختی را پیشنهاد میکند که از یک لایه حسگر، یک لایه ادغام حسگر و یک لایه وب حسگر تشکیل شده است. یک لایه کاربردی بخشی از این مطالعه نبود. پاراگراف های زیر بینشی در مورد اجرای این لایه ها ارائه می دهند.
2.1. لایه سنسور
لایه حسگر پایین ترین لایه زیرساخت پیشنهادی را نشان می دهد. این توسط چهار سیستم حسگر مختلف و یک DAS برای کنترل و دسترسی به سیستم های حسگر راه اندازی شد. ارتباط با یک شبکه محلی بی سیم 2.4 گیگاهرتز (WLAN) و یک اتصال اینترنت تلفن همراه 3G فعال شد.
2.1.1. سیستم های حسگر
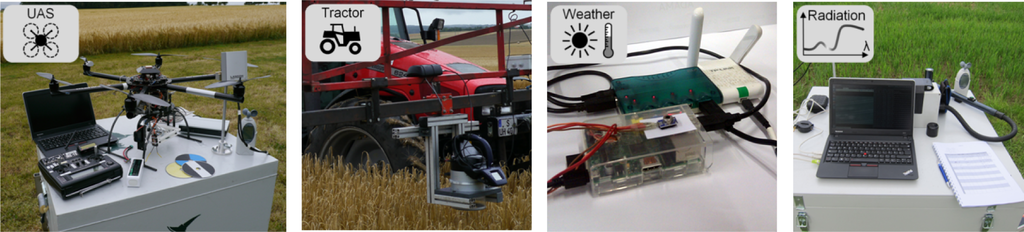
لایه حسگر شامل: (i) یک سنسور آب و هوای ثابت HYT221 (HYT221، IST AG، Wattwil، سوئیس) برای اندازهگیری دما و رطوبت نسبی. (ب) یک طیفسنج ثابت MMS1 NIR افزایشیافته (HandySpec Field، tec5 AG، Oberursel، آلمان) برای ثبت تابش خورشیدی برخوردی. (iii) یک تراکتور مجهز به حسگر فلورسانس Multiplex (Multiplex، FORCE-A، Orsay، فرانسه) برای تشخیص سلامت گیاه در مزرعه. و (IV) Hexe، نمونه اولیه UAS، مجهز به دوربین PiCam RGB (دوربین Raspberry Pi، Raspberry Pi Foundation، Caldecote، Cambridgeshire، UK)، یک دوربین چند طیفی خود مونتاژ شده (D3، VRmagic Holding AG، Mannheim، آلمان). ) و یک طیف سنج افزایش یافته NIR MMS1، برای تشخیص پارامترهای طیفی گیاهان [ 29]. سیستم حسگر HandySpec توسط یک نوت بوک مصرف کننده کار می کرد که به عنوان واحد پردازش DAS نیز عمل می کرد. تمام سیستمهای حسگر دیگر توسط کامپیوترهای Raspberry Pi Model B منفرد (Raspberry Pi Foundation، Caldecote، Cambridgeshire، UK)، که مجهز به آداپتورهای بیسیم برای فعال کردن ارتباط با DAS بودند، کار میکردند ( شکل 2 را ببینید ).
تمام سیستم های حسگر دارای ارجاع جغرافیایی بودند. سیستمهای حسگر ثابت در مکانهای شناخته شده قرار گرفتند، در حالی که سکوهای متحرک به یک سیستم ماهوارهای ناوبری جهانی (GNSS) برای ردیابی مکانهای خود در حین پرواز مجهز شدند. حسگرها توسط روالهای نرمافزاری خود توسعهیافته کنترل میشوند و رابطهای برنامهنویسی برنامهنویسی خاص فروشنده (API) را پیادهسازی میکنند. روال های نرم افزار بر روی واحدهای کنترلی Raspberry Pi و نوت بوک اجرا شد.
2.1.2. سیستم اکتساب داده ها
به عنوان نرم افزار DAS، نویسندگان چارچوب نرم افزاری مبتنی بر جاوا و منبع باز «Sensor Platform Framework» (SPF، https://wiki.52north.org/bin/view/SensorWeb/SensorPlatformFramework ) را انتخاب کردند. هدف اصلی آن جمع آوری و در صورت نیاز، درون یابی داده های حسگر بر اساس بازه زمانی دوره ای یا در دسترس بودن مشاهدات خاص است. معماری عمومی آن از طراحی وارونگی کنترل (IoC) پشتیبانی میکند و نقاط توسعه را ارائه میدهد که به عنوان رابط برای پلاگینهای ورودی و خروجی عمل میکنند [ 30 ].
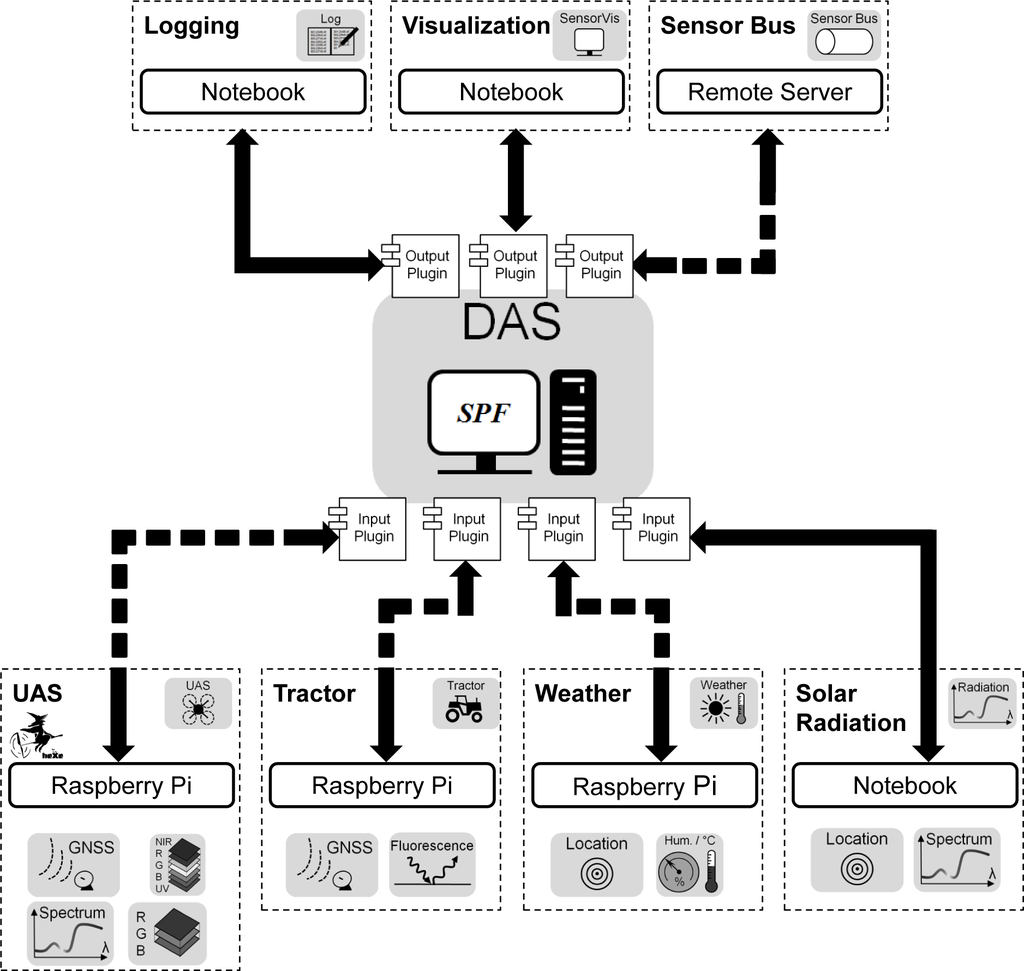
هر اتصال یک سیستم حسگر با DAS با پیادهسازی یک پلاگین ورودی و یک سند توصیف پلاگین محقق شد. از آنجایی که تمام واحدهای کنترل حسگر و DAS از یک شبکه مشترک استفاده می کنند، پلاگین های ورودی پیکربندی شدند: (i) برای ایجاد یک اتصال شبکه به واحد کنترل سنسور مناسب. (ب) برای ارسال پارامترهای پیکربندی. و (iii) درخواست مشاهدات حسگر ( شکل 3 را ببینید ).
سند توضیحات پلاگین رفتار درون یابی پلاگین، مشاهدات حسگر و متا داده های آن را توصیف می کند. داده های متا در SensorML، یک زبان توصیف حسگر، که توسط SWE مشخص شده و برای توصیف حسگرها و فرآیندها استفاده می شود، کدگذاری شدند [ 31 ]. جدول 1 مهمترین پارامترهای هر افزونه ورودی را فهرست می کند.
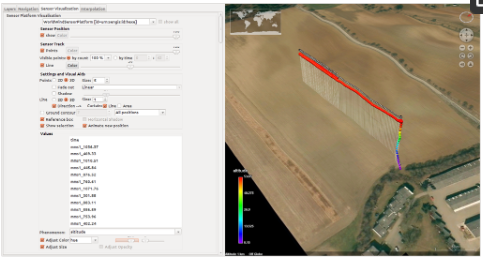
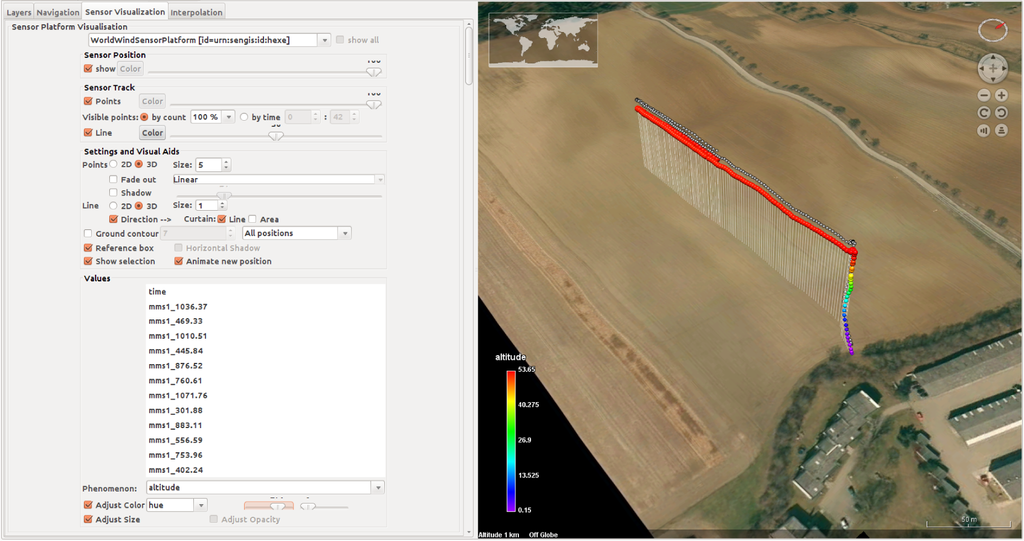
در سمت پلاگین های خروجی، سه مکانیسم خروجی مورد توجه بودند: یک کنترل بصری مشاهدات حسگر ارجاع شده جغرافیایی، مکانیزمی برای ارسال مشاهدات حسگر به شبکه حسگر و یک ثبت کننده داده ساده در صورتی که DAS از سنسور جدا شود. وب همه این مکانیسم ها قبلاً در سه پلاگین خروجی مختلف ایجاد شده اند که می توانند از وب سایت 52 ° N دانلود شوند و در شکل 3 نمایش داده شده اند . تجسم توسط پلاگین “SensorVis—Real Time Sensor Visualization” ( https://wiki.52north.org/bin/view/SensorWeb/SensorVis ) انجام شد که امکان تجسم زنده داده های حسگر را بر اساس یک محیط کره مجازی سه بعدی فراهم می کند [ 32]. ثبت با استفاده از یک نسخه کمی تطبیقشده از «افزونهنویس فایل»، که بخشی از بستههای استاندارد SPF است، محقق شد. به عنوان مکانیزم حمل و نقل، از “پلاگین خروجی اتوبوس حسگر” که در بسته های استاندارد SPF نیز توزیع شده است، استفاده شد. یک آداپتور حسگر را برای یک گذرگاه منطقی برای اتصال استاندارد دادههای حسگر و خدمات SWE پیادهسازی میکند که در پاراگرافهای زیر توضیح داده خواهد شد [ 18 ، 26 ].
2.2. لایه ادغام حسگر
نویسندگان گذرگاه حسگر را انتخاب کردند تا به عنوان لایه ادغام حسگر بین سیستم های حسگر و خدمات وب حسگر متصل از راه دور عمل کند ( شکل 4 را ببینید ). اگرچه این پلاگین برای فعال کردن یک زیرساخت اتصال و پخش حسگر برای وب حسگر با ترکیب عملکرد مطابقت معنایی، مکانیسم انتشار/اشتراک و مکانیزم درایور عمومی [ 18 ] طراحی شده است، پلاگین خروجی گذرگاه حسگر موجود محدود به پیام رسانی است، بر اساس پروتکل اتوبوس حسگر [ 26 ]. بنابراین، مسائل مربوط به خواستگاری، انتشار/اشتراک و درایور به صورت دستی رسیدگی می شد.
مکانیزم درایور برای کنترل و دسترسی به حسگرهای متصل برای هر پلاگین ورودی SPF، به صورت جداگانه اجرا شد. پلاگین گذرگاه حسگر طوری پیکربندی شده بود که تمام دادههای حسگر جمعآوریشده توسط SPF را در یک کانال گفتگوی پیامرسانی و حضوری (XMPP) که بهعنوان نرمافزار ejabberd ( https://www.ejabberd.im ) در اینترنت اجرا میشد، منتشر کند. سرور متصل در دانشگاه هوهنهایم (به فهرست 1 مراجعه کنید). قالب پیام چت از مشخصات پروتکل اتوبوس حسگر پیروی می کند و یک راه حل ساده برای توزیع داده های حسگر به یک سرویس SWE راه دور ارائه می دهد.
یک آداپتور سرویس اتوبوس حسگر برای ارسال مشاهدات از اتوبوس حسگر به یک SOS اجرا شد. این به عنوان یک برنامه پایتون تحقق یافت. این کانال مشترک شد و به کانال چت XMPP که حاوی دادههای حسگر منتشر شده بود گوش داد (به فهرست 1 مراجعه کنید). آداپتور سرویس برای تجزیه داده های حسگر از فرمت پروتکل گذرگاه حسگر به فرمت زبان نشانه گذاری توسعه پذیر درخواست SOS (XML) طراحی شده است. مشاهدات حسگر مرتبط به دنبال پروفایل های SensorML از پیش تعریف شده جمع آوری و گروه بندی شدند. پس از آن، یک درخواست InsertObservation برای اضافه کردن مشاهدات به SOS [ 28 ] تشکیل شد. درخواست InsertObservation بخشی از مشخصات عملیات تراکنش SOS است. این نمایه تراکنشی اختیاری به مشتریان امکان می دهد حسگرهای جدید را ثبت کنند (InsertSensor ) و مشاهدات را اضافه کنید. مشاهدات در درخواست مطابق با طرح مشاهدات و اندازهگیری (O&M) کدگذاری میشوند، استانداردی برای توصیف تمام مشاهدات یک سیستم حسگر [ 33 ].

2.3. لایه وب سنسور
لایه وب حسگر از یک SOS تشکیل شده است. این رایج ترین سرویس SWE است و در این مطالعه در اجرای 52 درجه N SOS 4.1 ( https://wiki.52north.org/bin/view/SensorWeb/SensorObservationServiceIV ) به طور انحصاری استفاده شد. این بر روی یک سرور راه اندازی شده بود که در دانشگاه هوهنهایم اجرا می شد. این یک رابط وب برای انتشار عملیات، به عنوان مثال، GetCapabilities ، GetObservation و DescribeSensor ، از یک طرف، و برای عملیات تراکنش، به عنوان مثال، InsertSensor و InsertObservation ، از سوی دیگر ارائه می دهد. این بر اساس چارچوب های فنی یک آپاچی تامکت 7 ( http://tomcat.apache.org/tomcat-7.0-doc) ظرف سرولت، یک PostgreSQL 9.3 ( http://www.postgresql.org/docs/9.3 ) سیستم مدیریت پایگاه داده (DBMS) و یک PostGIS 2.1 ( http://postgis.net/2013/08/17/postgis-2 ) -1-0 ) پشتیبانی از اشیاء جغرافیایی.
بر اساس توضیحات SensorML هر افزونه ورودی، هر سیستم حسگر یک بار با استفاده از عملیات InsertSensor ثبت شد. پس از ثبت تک تک سنسورها، آداپتور سرویس گذرگاه حسگر قادر به انجام عملیات InsertObservation در حین پرواز، با استفاده از پروتکل معماری سرویس گرا (SOAP) بود.
2.4. آزمایش میدانی
یک آزمایش میدانی معمولی PF به عنوان بستر آزمایشی برای زیرساخت پیشنهادی خدمت کرد. آزمایش مزرعه ای در 27 ژوئن 2014 و در آسمان صاف در مزرعه گندم زمستانه ( Triticum aestivum L.)، واقع در Ihinger Hof (48.74 درجه شمالی، 8.92 درجه شرقی)، ایستگاه تحقیقاتی دانشگاه هوهنهایم انجام شد. هدف کارآزمایی بدست آوردن و ذخیره مشاهدات حسگر بود: (1) به صورت محلی، روی یک نوت بوک، اجرای DAS. و (ii) از راه دور، در یک SOS متصل به اینترنت.
سیستم های حسگر بر روی زمین، روی یک تراکتور و روی یک UAS نصب شده بودند. تراکتور و پهپاد به گونهای پیکربندی شدهاند که مسیری از پیش تعریفشده در میدان را دنبال کنند، در حالی که ایستگاه هواشناسی و حسگر تابش خورشیدی در مکانهای ثابت در مرز میدان راهاندازی شده بودند. نوت بوک مصرف کننده، که DAS را اجرا می کند، در محل حسگر تابش خورشیدی، همراه با یک نقطه دسترسی WLAN 2.4 گیگاهرتز و یک اتصال اینترنت تلفن همراه 3G، که با اتصال تلفن همراه محقق شد، راه اندازی شد. همه سیستم های حسگر به طور همزمان با فاصله نمونه برداری 1 هرتز در طول یک دوره اندازه گیری تقریباً 6 دقیقه کار کردند. درخواستهای کشش مشاهده با همان سرعت از طریق اتصال WLAN 2.4 گیگاهرتز انجام شد. حداکثر فاصله 180 متری بین سیستم حسگر و نوت بوک توسط UAS بدست آمد. UAS مساحت کل 180 × را پوشش می دهد36 متر
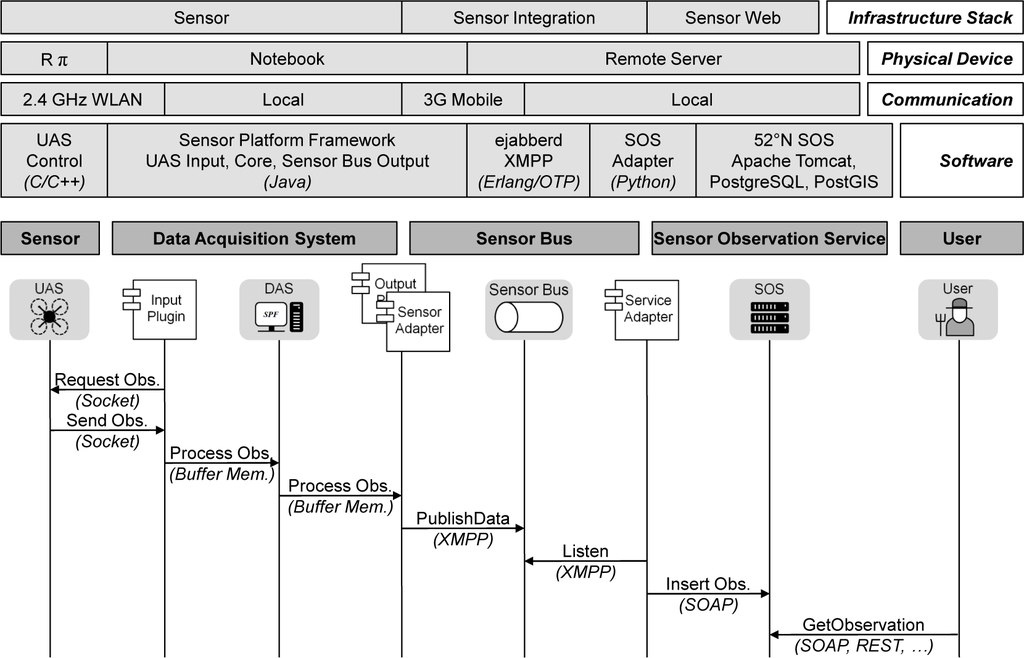
تجسم و ثبت مشاهدات دریافتی در دفترچه یادداشت صورت گرفت. علاوه بر این، پخش توسط پلاگین اتوبوس حسگر از طریق اتصال اینترنت تلفن همراه انجام شد. زیرساخت پیام رسان اتوبوس حسگر به عنوان یک سرویس XMPP ejabberd بر روی یک سرور متصل به اینترنت در دانشگاه هوهنهایم پیاده سازی شد. علاوه بر این، این سرور میزبان SOS و همچنین آداپتور سرویس اتوبوس حسگر بود که به پیام های دریافتی کانال چت XMPP گوش می داد. شکل 5 یک نمای کلی از زیرساخت کامل را با یک مثال مشاهده UAS نشان می دهد.
3. نتایج و بحث
این زیرساخت توانایی خود را در کنترل همه حسگرها، دسترسی و ارسال داده های آنها و ذخیره آنها در یک SOS استاندارد و تعریف شده ثابت کرد. آزمایش میدانی نشان داد که این زیرساخت حسگر برای سناریوهای PF قابل استفاده است، اگرچه برخی موانع هنوز وجود دارد.
3.1. لایه سنسور
علیرغم داشتن دو قطع اتصال تقریباً 10 ثانیه به دلیل ناپایداری WLAN، لایه حسگر همانطور که انتظار می رفت رفتار کرد. تحت شرایط شبکه پایدار، تمام سیستم های حسگر را می توان بدون نقص کنترل کرد. داده های آنها توسط DAS قابل دسترسی بوده و به لایه ادغام حسگر ارسال می شود. اتصال اینترنت تلفن همراه در تمام طول آزمایش پایدار بود.
کار فشرده ای باید روی برنامه نویسی نرم افزار واحد کنترل همه دستگاه های حسگر سرمایه گذاری می شد. این نرم افزار به گونه ای طراحی شده است که حسگرها را از راه دور کنترل کرده و از طریق ارتباط سوکت شبکه قابل دسترسی باشد. هر پیادهسازی نرمافزاری باید با درایورها و پروتکلهای خاص حسگر کنار بیاید. اگرچه اکثر فروشندگان حسگر API را برای توسعه دهندگان نرم افزار ارائه می دهند، برخی از پروتکل های حسگر هنوز باید توسط خود شخص پیاده سازی شوند، به عنوان مثال، پروتکل کنترل و انتقال دستگاه طیفی (SDCTP) برای کنترل شبکه طیف سنج پیشرفته MMS1 NIR. یک مکانیسم محرک عمومی، به عنوان مثال، مدل توصیفگر رابط حسگر (SID)، می تواند بر این کار فشرده غلبه کند [ 34 ].
SPF که به عنوان DAS استفاده می شد، هدف خود را برای یکپارچه سازی تمام سیستم های حسگر انجام داد. با این وجود، پیاده سازی افزونه های ورودی صحیح و توضیحات افزونه باید با دقت انجام می شد. هر پلاگین ورودی برای اتصال به یک سوکت شبکه خاص برای برقراری ارتباط با واحد کنترل سنسور مربوطه برنامه ریزی شده بود. دسترسی به دادههای حسگر با درخواستهای کشش 1 هرتز پیادهسازی شد، که جدا از دو بار بیثباتی شبکه، قابل اعتماد عمل کرد. برای سنسورهای قابل تنظیم، کنترل حسگر از طریق یک رابط کاربری گرافیکی (GUI) محقق شد. توضیحات حسگر به روشی استاندارد شده با SensorML انجام شد و ویژگیهای حسگرها را به عنوان بخشی از سند توضیحات پلاگین تعریف کرد. علاوه بر این، از سند توضیحات برای تعیین رفتار درون یابی پلاگین های ورودی، و همچنین ورودی و خروجی مشاهدات استفاده شد. پلاگین های خروجی همانطور که انتظار می رفت کار کردند. پس از ثبت نام برای استفاده، افزونه تجسم قادر بود تمام مشاهدات را از هر حسگر در حال پرواز نمایش دهد (نگاه کنید بهشکل 6 ). افزونه ورود به سیستم همه مشاهدات دریافتی را در یک فایل csv. ثبت کرد. حجم فایل csv. در طول 6 دقیقه اندازه گیری به 1.3 مگابایت رسید. پلاگین خروجی اتوبوس حسگر بی عیب و نقص کار می کرد. مشاهدات دریافتی را به فرمت پروتکل اتوبوس حسگر تجزیه کرد و داده ها را به کانال چت XMPP ارسال کرد.
اجرای لایه حسگر عملی بودن خود را ثابت کرد. یک شبکه پایدار و اتصال به اینترنت برای این معماری ضروری است. علیرغم از دست دادن بالقوه برخی از دادههای حسشده به دلیل مکانیسمهای کشش نشده، ناپایداریها ممکن است برای برنامههای تقریباً همزمان در سناریوهایی که جمعآوری داده، پردازش داده و کاربرد آنلاین انجام میشود، حیاتی باشد.
3.2. لایه ادغام حسگر
به دلیل عملکرد محدود پلاگین خروجی اتوبوس حسگر، لایه ادغام حسگر به مکانیزم پیام رسانی اتوبوس حسگر محدود شد. قادر به اتصال به کانال چت و پخش تمام داده های حسگر جمع آوری شده توسط DAS بود. به جای پخش مجموعه داده های شطرنجی کامل، به عنوان مثال، تصاویر، شرح داده های شطرنجی گرفته شده به شناسه های تصویر کوتاه محدود شد. در نتیجه، تمام مجموعه داده های حسگر می توانند از طریق اتصال اینترنت بی سیم منتقل شوند. انتقال داده به سرویس XMPP رمزگذاری نشده است. به طور کلی، رمزگذاری انتقال مطلوب و در دسترس است (امنیت لایه حمل و نقل، TLS). اگر ارتباط کانال باید خصوصی نگه داشته شود، می توان آن را به کاربران خاص و احراز هویت رمز عبور محدود کرد.
از آنجایی که این مطالعه تنها از یک آداپتور سنسور و یک آداپتور سرویس استفاده میکند، از معماری گذرگاه حسگر در همه امکاناتش استفاده نمیشود. با این وجود، زیرساخت معرفی شده مقیاس پذیری مفهوم اتوبوس حسگر را ارائه می دهد. می توان آن را با بسیاری از آداپتورهای حسگر و آداپتورهای خدمات، به عنوان مثال، برای چندین SOS و SES، که در مؤسسات مختلف قرار دارند، تطبیق داد. علاوه بر این، از آنجایی که این یک مفهوم منطقی است، پیامرسانی به XMPP محدود نمیشود و میتوان آن را با پروتکلهای ارتباطی دیگر جایگزین یا گسترش داد، به عنوان مثال، توییتر و گفتگوی رله اینترنتی (IRC) [ 18 ]. برای فعال کردن وصل و پخش حسگر، مکانیسمهای میانجیگری، انتشار/اشتراک و درایور هنوز باید اجرا شوند.
3.3. لایه وب سنسور
لایه وب حسگر عملکرد خوبی داشت. سرور آپاچی تامکت و همچنین PostgreSQL/PostGIS DBMS به آرامی و طبق روالهای نصب استاندارد مستند نصب شدند. بسته SOS به عنوان یک فایل خود استخراج کننده برای ظرف servlet تحویل داده شد. نصب همانطور که انتظار می رفت کار کرد. تمام پایگاه های داده مورد نیاز پس از پیکربندی SOS به طور خودکار ایجاد شدند. SOS تمام عملیات آداپتور سرویس SOS پیاده سازی شده را پشتیبانی می کند. در اینجا از InsertSensor و InsertObservation استفاده شده است.
4. نتیجه گیری
این کار کاربرد تعاریف چارچوب ابتکاری OGC SWE را برای راهاندازی زیرساخت داده حسگر برای برنامههای PF ثابت کرد. زیرساخت پیشنهادی مجموعه استاندارد و ذخیرهسازی دادههای حسگر کشاورزی مکانی-زمانی را تضمین میکند که توسط سرویسهای SWE و برنامههای کاربردی کاربر قابل دسترسی است. این مبتنی بر نرم افزار منبع باز است و امکان استقرار سیستم های حسگر و خدمات SWE متعدد را ارائه می دهد. DAS یک روش ثابت برای کنترل، دسترسی و ارسال مشاهدات حسگر ارائه می دهد. مفهوم اتوبوس حسگر برای سناریوهای پیچیدهتر که شامل سیستمهای حسگر، خدمات DAS و SWE میشود، مقیاسپذیر است. SOS پیادهسازی شده اولین گام به سوی معماری سرویسمحور است که بر اساس سرویسهای وب بیشتر و استانداردهای OGC است که عملکردهای یک SDI جامع را برای PF ارائه میکند. در SDI، کلاینت های وب به عنوان رابط بین داده های حسگر ذخیره شده و کاربر عمل می کنند و لایه کاربردی پشته زیرساخت را درک می کنند. این می تواند برای ماشین آلات و سیستم های حسگر در مقیاس مزرعه اعمال شود یا با خدمات داده ارائه شده توسط طرف های خارجی گسترش یابد. علاوه بر این، از آنجایی که مشاهدات به دست آمده توسط سیستمهای متحرک یا ثابت زیرساخت یکسانی دارند، برنامهها و جریانهای کاری ساخته شده در بالای آن میتوانند خود برای دستگاههای موبایل یا ثابت ساخته شوند. تحقیقات آینده بر ایجاد چنین SDI برای توزیع، پردازش و تجزیه و تحلیل دادههای حسگر استاندارد در حوزه PF متمرکز خواهد شد. این می تواند برای ماشین آلات و سیستم های حسگر در مقیاس مزرعه اعمال شود یا با خدمات داده ارائه شده توسط طرف های خارجی گسترش یابد. علاوه بر این، از آنجایی که مشاهدات به دست آمده توسط سیستمهای متحرک یا ثابت زیرساخت یکسانی دارند، برنامهها و جریانهای کاری ساخته شده در بالای آن میتوانند خود برای دستگاههای موبایل یا ثابت ساخته شوند. تحقیقات آینده بر ایجاد چنین SDI برای توزیع، پردازش و تجزیه و تحلیل دادههای حسگر استاندارد در حوزه PF متمرکز خواهد شد. این می تواند برای ماشین آلات و سیستم های حسگر در مقیاس مزرعه اعمال شود یا با خدمات داده ارائه شده توسط طرف های خارجی گسترش یابد. علاوه بر این، از آنجایی که مشاهدات به دست آمده توسط سیستمهای متحرک یا ثابت زیرساخت یکسانی دارند، برنامهها و جریانهای کاری ساخته شده در بالای آن میتوانند خود برای دستگاههای موبایل یا ثابت ساخته شوند. تحقیقات آینده بر ایجاد چنین SDI برای توزیع، پردازش و تجزیه و تحلیل دادههای حسگر استاندارد در حوزه PF متمرکز خواهد شد.
منابع
- Oerke, EC, Gerhards, R., Menz, G., Sikora, RA, Eds. حفاظت از محصولات دقیق – چالش و استفاده از ناهمگونی ، چاپ اول. Springer Verlag: Dordrecht، هلند، 2010.
- Heege، HJ، Ed. دقت در کشاورزی محصول: مفاهیم خاص سایت و روشهای سنجش: کاربردها و نتایج ، ویرایش اول. Springer Science & Business Media: Dordrecht، هلند، 2013.
- Peteinatos، GG; ویس، م. آندوجار، دی. روئدا آیالا، وی. Gerhards, R. استفاده بالقوه از فن آوری های حسگر زمینی برای تشخیص علف های هرز. آفت مناگ. علمی 2014 ، 70 ، 190-199. [ Google Scholar ]
- فیلیپس، ای جی؛ نیولندز، NK; لیانگ، SH. Ellert، BH سنجش یکپارچه رطوبت خاک در مقیاس مزرعه: اندازهگیری، مدلسازی و اشتراکگذاری برای بهبود پشتیبانی تصمیمگیری کشاورزی. محاسبه کنید. الکترون. کشاورزی 2014 ، 107 ، 73-88. [ Google Scholar ]
- لی، ز. وانگ، ن. فرانزن، آ. طاهر، پ. گودزی، سی. ژانگ، اچ. لی، ایکس. استقرار عملی یک شبکه حسگر بی سیم دارای خاک در میدان. محاسبه کنید. ایستادن. رابط ها 2014 ، 36 ، 278-287. [ Google Scholar ]
- Peteinatos، GG; گیزر، م. کونز، سی. گرهاردز، آر. رویکرد چند حسگر برای شناسایی علائم استرس ترکیبی در گندم بهاره، مجموعه مقالات دومین کنفرانس بین المللی رباتیک و فناوری های پیشرفته و تجهیزات کشاورزی و جنگلداری، مادرید، اسپانیا، 21-23 مه 2014. Gonzalez-de-Santos, P., Ribeiro, A., Eds.; صص 131-140.
- مارتینون، وی. فدائیلی، EM; اوین، س. زچا، سی. استافورد، ج.، اد. مرکز علم و جامعه چک: پراگ، جمهوری چک، 2011; صص 547-561.
- ترمبلی، ن. وانگ، ز. Ma، BL; بلک، سی. Vigneault، P. مقایسه داده های محصول اندازه گیری شده توسط دو حسگر تجاری برای کاربرد نیتروژن با نرخ متغیر. دقیق کشاورزی 2009 ، 10 ، 145-161. [ Google Scholar ]
- آندوجار، دی. ویس، م. Gerhards, R. یک سیستم اولتراسونیک برای تشخیص علف های هرز در محصولات غلات. سنسورها 2012 ، 12 ، 17343-17357. [ Google Scholar ]
- اسکولا، آ. آندوجار، دی. دورادو، جی. فرناندز-کوئینتانیلا، سی. Rosell-Polo، JR تشخیص و تبعیض علف های هرز در مزارع ذرت با استفاده از حسگرهای اولتراسونیک و لیدار، مجموعه مقالات کنفرانس بین المللی مهندسی کشاورزی CIGR، والنسیا، اسپانیا، 8 تا 12 ژوئیه 2012.
- سپسکبیل، ص. لیون، جی جی. Huete, A. پیشرفت در سنجش از دور فراطیفی پوشش گیاهی و مزارع کشاورزی. In Hyperspectral Remote Sensing of Vegetation , 1st ed.; Thenkabail, PS, Lyon, JG, Huete, A., Eds. CRC Press Inc.: Boca Raton، FL، USA، 2012; ص 4-35. [ Google Scholar ]
- برنی، جی. زارکو-تجادا، پ. سوارز، ال. Fereres، E. سنجش از دور چند طیفی حرارتی و باریک برای نظارت بر پوشش گیاهی از یک وسیله نقلیه هوایی بدون سرنشین. IEEE Trans. Geosci. Remote Sens 2009 , 47 , 722-738. [ Google Scholar ]
- گایپل، جی. لینک، جی. Claupein, W. مدل سازی ترکیبی طیفی و فضایی عملکرد ذرت بر اساس تصاویر هوایی و مدل های سطح محصول به دست آمده با یک سیستم هواپیمای بدون سرنشین. Remote Sens 2014 , 6 , 10335–10355. [ Google Scholar ]
- نش، ای. کردوان، پ. بیل، آر. کاربردهای وب سرویسهای فضایی باز در کشاورزی دقیق: بررسی. دقیق کشاورزی 2009 ، 10 ، 546-560. [ Google Scholar ]
- بوتس، ام. پرسیوال، جی. رید، سی. فعال سازی وب حسگر دیویدسون، J. OGC: نمای کلی و معماری سطح بالا. در شبکه های ژئوسنسور ؛ Nittel, S., Labrinidis, A., Stefanidis, A., Eds. Springer: برلین/هایدلبرگ، آلمان، 2008; جلد 4540، صص 175–190. [ Google Scholar ]
- بوتس، ام. پرسیوال، جی. رید، سی. Davidson, J. OGC Sensor Web Enablement: Overview and High Level Architecture (White Paper) (OGC 06-050r2) ; مشخصات پیادهسازی OGC: Wayland، MA، ایالات متحده آمریکا، 2013. [ Google Scholar ]
- برورینگ، آ. اکترهوف، جی. جیرکا، س. سیمونیس، آی. اوردینگ، تی. استاش، سی. لیانگ، اس. Lemmens, R. فعال سازی وب سنسور نسل جدید. Sensors 2011 , 11 , 2652-2699. [ Google Scholar ]
- برورینگ، آ. مائوئه، پی. یانوویچ، ک. نوست، دی. Malewski، C. اتصال و پخش حسگر با قابلیت معنایی برای وب حسگر. Sensors 2011 , 11 , 7568-7605. [ Google Scholar ]
- برورینگ، آ. بلترامی، پ. لمنز، آر. Jirka، S. ادغام خودکار ژئوسنسورها با شبکه حسگر برای تسهیل مدیریت سیل. در رویکردهای مدیریت بلایا – ارزیابی خطرات، شرایط اضطراری و اثرات بلایا ؛ Tiefenbacher, J., Ed. InTech: Rijeka، کرواسی، 2012; صص 65-86. [ Google Scholar ]
- Klopfer, M., Ioannis, K., Eds. ارکستر—معماری خدمات باز برای مدیریت ریسک ؛ کنسرسیوم ORCHESTRA، 2008. در دسترس آنلاین: http://www.eu-orchestra.org/docs/ORCHESTRA-Book.pdf در 13 نوامبر 2014 قابل دسترسی است.
- ویبنسون، جی. Jackenkroll، M. ارزیابی و مدلسازی زیرساخت دادههای مکانی مبتنی بر استاندارد برای کشاورزی دقیق، مجموعه مقالات کنفرانس EFITA-WCCA-CIGR، تورینو، ایتالیا، 24-27 ژوئن 2013. پ. C0107.
- پولوجاروی، ک. کویستینن، ام. لویمولا، ام. ورونن، پی. پهکاسالو، م. Tervonen, J. معماری های سیستم توزیع شده، استانداردسازی و راه حل های وب سرویس در کشاورزی دقیق، مجموعه مقالات چهارمین کنفرانس بین المللی سیستم های اطلاعات جغرافیایی پیشرفته، برنامه ها و خدمات، والنسیا، اسپانیا، 30 ژانویه تا 4 فوریه 2012. صص 171-176.
- ساوانت، س. آدینارایانا، جی. دوربه، اس. Tripathy، A.; Sudharsan، D. معماری سرویس گرا برای شبکه های حسگر بی سیم در کشاورزی. در آرشیو بین المللی فتوگرامتری، سنجش از دور و علوم اطلاعات فضایی، مجموعه مقالات کنگره ISPRS، ملبورن، استرالیا، 25 اوت تا 1 سپتامبر 2012. صص 467-472.
- کوبیچک، پی. کوزل، جی. استامپچ، ر. لوکاس، وی. نمونه سازی تجسم داده های جغرافیایی و حسگر برای کشاورزی. محاسبه کنید. الکترون. کشاورزی 2013 ، 97 ، 83-91. [ Google Scholar ]
- کایوسجا، ج. جکنکرول، ام. لینکولهتو، ر. ویس، م. Gerhards, R. کنترل خودکار عملیات کشاورزی بر اساس خدمات وب فضایی. محاسبه کنید. الکترون. کشاورزی 2014 ، 100 ، 110-115. [ Google Scholar ]
- برورینگ، آ. فورستر، تی. جیرکا، س. Priess, C. Sensor bus: یک لایه واسطه برای پیوند ژئوسنسورها و وب حسگر، COM.Geo ’10، مجموعه مقالات اولین کنفرانس بین المللی و نمایشگاه محاسبات برای تحقیقات و کاربردهای جغرافیایی، Bethesda، MD، ایالات متحده، 21-23 ژوئن 2010; ACM: نیویورک، نیویورک، ایالات متحده آمریکا؛ ص 12:1-12:8.
- اکترهوف، جی. Everding, T. OpenGIS Sensor Event Service Interface Specification (مقاله بحث) (OGC 08-133) ; مشخصات پیاده سازی OGC. Wayland، MA، ایالات متحده، 2008. [ Google Scholar ]
- Na، A. کشیش، خدمات مشاهده سنسور M. (OGC 06-009r6) ; مشخصات پیاده سازی OGC. Wayland، MA، ایالات متحده، 2007. [ Google Scholar ]
- گایپل، جی. Peteinatos، GG; کلوپین، دبلیو. گرهاردز، R. ارتقای وسایل نقلیه هوایی بدون سرنشین میکرو به سیستم های حسگر هوایی کشاورزی، کشاورزی دقیق ’13، مجموعه مقالات ECPA، لیدا، اسپانیا، 7-11 ژوئیه 2013. استافورد، ج.، اد. Wageningen Academic Publishers: Wageningen, The Neatherlands, 2013; صص 161-167.
- ریکه، ام. فورستر، تی. Bröring، A. وسایل نقلیه هوایی بدون سرنشین به عنوان سکوهای متحرک چند سنسوری، مجموعه مقالات چهاردهمین کنفرانس بین المللی AGILE در علوم اطلاعات جغرافیایی، اوترخت، هلند، 18-21 آوریل 2011.
- بوتس، ام. رابین، A. زبان مدل سنسور OpenGIS (SensorML) (OGC 07-000) ; مشخصات پیاده سازی OGC. Wayland، MA، ایالات متحده، 2007. [ Google Scholar ]
- Nüst, D. تجسم درونیابی مشاهدات حسگر تلفن همراه. مجموعه مقالات GeoViz، هامبورگ، آلمان، 5 تا 8 مارس 2013.
- کاکس، اس. مشاهده و اندازهگیری – پیادهسازی XML (OGC 10-025rl) ; مشخصات پیاده سازی OGC. Wayland، MA، ایالات متحده آمریکا، 2011. [ Google Scholar ]
- برورینگ، آ. در زیر، S. Foerster، T. توصیفگرهای رابط حسگر اعلامی برای وب حسگر، مجموعه مقالات WebMGS 2010: اولین کارگاه بین المللی در مورد نقشه برداری وب فراگیر، پردازش جغرافیایی و خدمات، کومو، ایتالیا، 26-27 اوت 2010.

© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است
بدون نظر