

خلاصه
چندین پیکربندی سخت افزاری اسکنر لیزری را می توان برای سیستم های نقشه برداری موبایل اعمال کرد. به عنوان بهترین عمل، اسکنرهای لیزری به صورت افقی یا مایل به صورت عمودی چرخانده می شوند تا احتمال تماس بین صفحه اسکن لیزری و هر سطحی که عمود بر جهت حرکت است افزایش یابد. تمایلات عمودی همچنین تعداد نمایههای اسکن را که ویژگیهای عمودی باریک را نشان میدهند، به حداکثر میرساند، چیزی که میتواند هنگام تلاش برای تشخیص ویژگیها مفید باشد. افزودن اسکنر دوم به MMS اجازه می دهد تا داده های بیشتری را ضبط کند و با پر کردن سایه های لیزر، پوشش لیزری یک منطقه را بهبود بخشد. با این حال، در هر MMS، جهت گیری هر اسکنر بر روی پلت فرم باید تعیین شود. تغییرات در جهت افقی یا عمودی اسکنر می تواند برد تا اهداف عمودی و سطح جاده را افزایش دهد. با زوایای بیش از حد اسکنر، چگالی نقطه را به طور قابل توجهی کاهش می دهد. اطلاعات محدودی برای کمک به سازندگان یا اپراتورها در شناسایی جهت گیری بهینه اسکنر برای بررسی های کنار جاده در دسترس است. روش پیشنهادی در این مقاله از نرمال های سطح سه بعدی و فرمول های هندسی برای ارزیابی تأثیر جهت گیری اسکنر بر توزیع نقطه استفاده می کند. نشان داده شد که با تغییر جهت اسکنر، تعداد پالسهایی که به هدف برخورد میکنند میتواند تا حد زیادی افزایش یابد، و همچنین میتوان تعداد پروفایلهای متقاطع با هدف را افزایش داد – چیزی که به ویژه برای ویژگیهای عمودی باریک مهم است. اهمیت شناسایی مبادله صحیح بین تعداد پروفیل های متقاطع با هدف و فاصله نقطه نیز مطرح شد. اطلاعات محدودی برای کمک به سازندگان یا اپراتورها در شناسایی جهت گیری بهینه اسکنر برای بررسی های کنار جاده در دسترس است. روش پیشنهادی در این مقاله از نرمال های سطح سه بعدی و فرمول های هندسی برای ارزیابی تأثیر جهت گیری اسکنر بر توزیع نقطه استفاده می کند. نشان داده شد که با تغییر جهت اسکنر، تعداد پالسهایی که به هدف برخورد میکنند میتواند تا حد زیادی افزایش یابد، و همچنین میتوان تعداد پروفایلهای متقاطع با هدف را افزایش داد – چیزی که به ویژه برای ویژگیهای عمودی باریک مهم است. اهمیت شناسایی مبادله صحیح بین تعداد پروفیل های متقاطع با هدف و فاصله نقطه نیز مطرح شد. اطلاعات محدودی برای کمک به سازندگان یا اپراتورها در شناسایی جهت گیری بهینه اسکنر برای بررسی های کنار جاده در دسترس است. روش پیشنهادی در این مقاله از نرمال های سطح سه بعدی و فرمول های هندسی برای ارزیابی تأثیر جهت گیری اسکنر بر توزیع نقطه استفاده می کند. نشان داده شد که با تغییر جهت اسکنر، تعداد پالسهایی که به هدف برخورد میکنند میتواند تا حد زیادی افزایش یابد، و همچنین میتوان تعداد پروفایلهای متقاطع با هدف را افزایش داد – چیزی که به ویژه برای ویژگیهای عمودی باریک مهم است. اهمیت شناسایی مبادله صحیح بین تعداد پروفیل های متقاطع با هدف و فاصله نقطه نیز مطرح شد. روش پیشنهادی در این مقاله از نرمال های سطح سه بعدی و فرمول های هندسی برای ارزیابی تأثیر جهت گیری اسکنر بر توزیع نقطه استفاده می کند. نشان داده شد که با تغییر جهت اسکنر، تعداد پالسهایی که به هدف برخورد میکنند میتواند تا حد زیادی افزایش یابد، و همچنین میتوان تعداد پروفایلهای متقاطع با هدف را افزایش داد – چیزی که به ویژه برای ویژگیهای عمودی باریک مهم است. اهمیت شناسایی مبادله صحیح بین تعداد پروفیل های متقاطع با هدف و فاصله نقطه نیز مطرح شد. روش پیشنهادی در این مقاله از نرمال های سطح سه بعدی و فرمول های هندسی برای ارزیابی تأثیر جهت گیری اسکنر بر توزیع نقطه استفاده می کند. نشان داده شد که با تغییر جهت اسکنر، تعداد پالسهایی که به هدف برخورد میکنند میتواند تا حد زیادی افزایش یابد، و همچنین میتوان تعداد پروفایلهای متقاطع با هدف را افزایش داد – چیزی که به ویژه برای ویژگیهای عمودی باریک مهم است. اهمیت شناسایی مبادله صحیح بین تعداد پروفیل های متقاطع با هدف و فاصله نقطه نیز مطرح شد. همچنین میتوان تعداد پروفایلهایی را که با هدف تلاقی میکنند افزایش داد – چیزی که به ویژه برای ویژگیهای عمودی باریک مهم است. اهمیت شناسایی مبادله صحیح بین تعداد پروفیل های متقاطع با هدف و فاصله نقطه نیز مطرح شد. همچنین میتوان تعداد پروفایلهایی را که با هدف تلاقی میکنند افزایش داد – چیزی که به ویژه برای ویژگیهای عمودی باریک مهم است. اهمیت شناسایی مبادله صحیح بین تعداد پروفیل های متقاطع با هدف و فاصله نقطه نیز مطرح شد.
چگالی نقطه ; اسکنر لیزری ؛ جهت اسکنر ; سیستم های نقشه برداری سیار
1. معرفی
سیستم های نقشه برداری سیار (MMS) می توانند جمع آوری سریع، کارآمد و دقیق داده ها را در محیط های زمینی و دریایی فعال کنند. ترکیب انواع حسگرهای اندازه گیری مانند دوربین [ 1 ]، اسکنر لیزری [ 2 ]، دوربین حرارتی [ 3 ] یا رادار نفوذی زمین [ 4 ]] در یک پلت فرم متحرک امکان جمع آوری داده ها را با سرعتی قابل مقایسه با وسایل نقلیه اطراف فراهم می کند. این توانایی نیاز به بستن جاده ها را نفی می کند و با جدا نگه داشتن نقشه بردار از ترافیک در حال حرکت، ایمنی خدمه نقشه برداری را افزایش می دهد. ترکیبی از گیرندههای GNSS، ابزارهای اندازهگیری فاصله (DMI) و واحدهای اندازهگیری اینرسی (IMU) امکان ارجاع جغرافیایی مستقیم دادههای مکانی را بدون نیاز به کنترل زمینی فراهم میکنند. ابرهای نقطهای از محیطهای شهری، شهری یا روستایی میتوانند در پروژههای بالقوه متعدد، از پروژههای حملونقل [ 5 ] تا بررسی رودخانه [ 6 ]، مطالعات پوشش گیاهی [ 7 ] یا مدلهای شهر برای تجزیه و تحلیل رفتار عابران پیاده [ 8 ] استفاده شوند.]. رایجترین نوع اسکنر در MMSهای تجاری که برای ایجاد این ابرهای نقطهای استفاده میشود، اسکنر دوبعدی دایره کامل است ([ 2 ، 9-11 ] ) . این نوع اسکنر برای ارائه بعد سوم به حرکت رو به جلو MMS متکی است و منجر به یک الگوی اسکن چوب پنبه می شود.
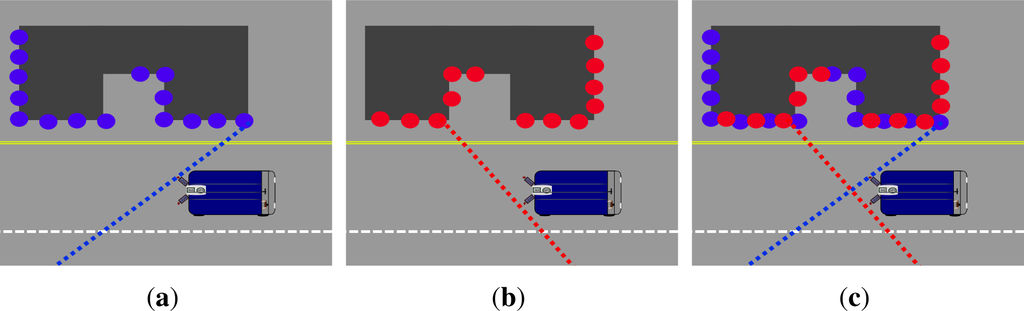
بهترین روش بررسی در هنگام استفاده از اسکنرهای لیزری دوبعدی در MMS برای جهت دهی اسکنر لیزری (ها) بر روی پلت فرم نظرسنجی برای به حداکثر رساندن پوشش محیط است. بهبود درک ما از چگونگی تأثیر تغییرات جهت اسکنر بر الگوی اسکن می تواند مزایای بالقوه زیادی را ارائه دهد. چرخش های افقی اسکنر تماس بین صفحه اسکن دوبعدی و هر ساختار عمود بر جهت حرکت وسیله نقلیه را تضمین می کند، چیزی که در صورت عدم استفاده از چرخش رخ نمی دهد، همانطور که در شکل 1a،b نشان داده شده است. یکی از عوارض جانبی ترکیب چرخش افقی یک اسکنر دوبعدی این است که برد تا هدف افزایش مییابد ( شکل 1c )، که منجر به فاصله بیشتر نقاط و در نتیجه کاهش تراکم نقطه میشود.
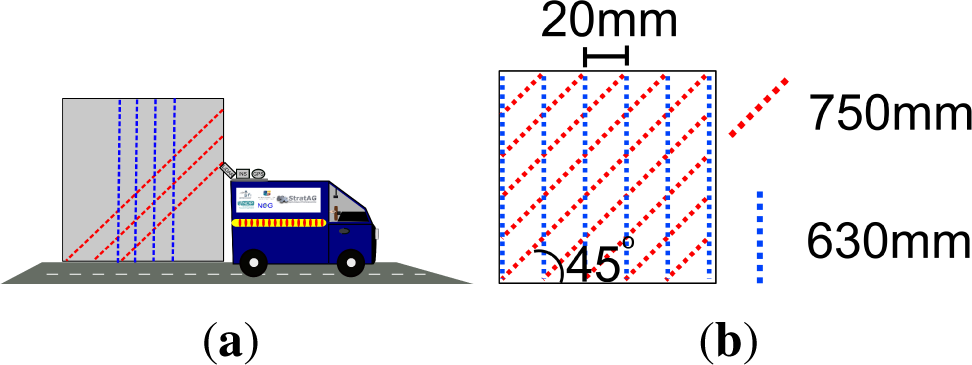
همچنین معرفی یک شیب عمودی اسکنر لیزری بهترین روش بررسی است. همانطور که در شکل 2a,b نشان داده شده است، این امکان را فراهم می کند که سازه های سقفی که عمود بر جهت حرکت هستند توسط صفحه اسکن گرفته شوند . یک مزیت اضافی از ترکیب شیب عمودی اسکنر این است که می توان تعداد صفحات اسکن را که با یک ساختار عمودی در تماس هستند افزایش داد. فاصله پروفیل تا حد زیادی توسط سرعت خودرو و فرکانس آینه اسکنر کنترل می شود، اما اجسام باریک را می توان به طور کامل توسط پروفایل های اسکن بعدی از دست داد. شیب عمودی اسکنر می تواند این خطر را کاهش دهد، همانطور که در شکل 2c نشان داده شده است.، به موجب آن چرخش 45 درجه منجر به تلاقی پروفیل های اسکن متعدد با هدف عمودی باریک می شود. ترکیبی از هر دو چرخش افقی و شیب عمودی، که مزایای هر دو را فراهم می کند و در این مقاله به عنوان چرخش اسکنر دو محوره از آن یاد می شود، در بسیاری از سیستم های تجاری که قبلاً به آنها اشاره شده است استفاده می شود [ 2 ، 9-11 ] .
گنجاندن اسکنر دوم نیز از پوشش MMS بهره می برد. این به این دلیل است که صفحه اسکن از یک اسکنر میتواند دادههایی را که ممکن است در اسکنر دوم پنهان شده باشد، ضبط کند. این مزیت اصلی یک سیستم اسکنر دوگانه است و نه تنها حجم داده ها را در تمام سطوح افزایش می دهد، بلکه خطر نیاز به بررسی مجدد یک منطقه برای پر کردن سایه های داده را کاهش می دهد. شکل 3a تعامل بین یک اسکنر نزدیک و یک سازه کنار جاده را نشان می دهد. صفحه اسکن با قسمت های خاصی از ساختار تماس پیدا نمی کند و بنابراین سایه های داده ظاهر می شوند. شکل 3b این اصل را برای اسکنر در سمت دیگر وسیله نقلیه نشان می دهد، اگرچه ناحیه سایه پس از آن معکوس می شود. در شکل 3cسیستم اسکنر دوگانه هر طرف سازه را که از جاده قابل مشاهده است بررسی کرده و تمامی سایه های داده حذف شده است.
مشخصات بررسی مانند [ 12-14 ] دستورالعمل های دقیقی را برای اینکه چه تراکم نقطه ای برای مناطق خاص در یک بررسی مورد نیاز است، مشخص می کند. گرفتن اطلاعات با تراکم نقطه مورد نیاز به ویژه زمانی مهم است که الگوریتم های خودکار برای استخراج ویژگی ها از ابر نقطه استفاده شوند. الگوریتمهای خودکار یک موضوع تحقیقاتی محبوب در جامعه نقشهبرداری موبایل هستند، زیرا صرفهجویی بالقوه در زمان پردازش که از خودکارسازی این گردشهای کاری ناشی میشود، برای صنعت بسیار جذاب است. تعدادی از کارها [ 15-21 ] نشان میدهند که ایجاد این الگوریتمها تا چه حد بیاهمیت است، بهویژه زمانی که چگالی نقطه کم است [ 22 ، 23 ] . برای مثال، نویسندگان در [ 24 –27 ] نشان میدهد که در اجسام استوانهای، در صورت تلاش برای خودکارسازی فرآیند شناسایی این ویژگیها در یک ابر نقطه، حداقل فاصله نمایه یا فاصله نقطه یا هر دو مورد نیاز است. بنابراین، توجیه قوی برای تحقیقات بیشتر با هدف بهبود فاصله نقطه، فاصله نیم رخ یا تراکم نقطه کلی اشیاء در ابر نقطه برای تسهیل تشخیص خودکار وجود دارد.
2. پیشینه و کارهای مرتبط
تغییرات در جهت اسکنر می تواند به حداکثر رساندن اطلاعاتی که نقشه بردار روی اشیاء در ابر نقطه می گیرد کمک کند. اثرات تغییرات در پیکربندی و سخت افزار MMS برای مدتی طولانی مورد توجه جامعه تحقیقاتی و صنعت بوده است. تا به امروز، این آزمایشها با استفاده از سیستمهای متعدد در تستهای معیار، شبیهسازی LiDAR یا روشهای دیگر، مانند MIMIC، طراحی شده توسط مرکز ملی ژئومحاسبات در دانشگاه Maynooth انجام شدهاند. اهمیت این موضوع زمانی آشکار می شود که گروه های تحقیقاتی و صنعت شروع به ارائه انعطاف پذیری بیشتری در نصب اسکنر خود می کنند.
2.1. محک زدن سیستم
[ 28 ] در کار خود بر روی محک زدن MMS، تعدادی از سیستم های نقشه برداری موبایل را محک زدند و نتایجی را برای مجموعه ای از پلتفرم های تجاری و تحقیقاتی ارائه کردند. شبیهسازیهای LiDAR مانند آنهایی که در [ 29 ] برای پلتفرمهای هوایی توسعه یافتهاند نیز ابزارهای محبوب و مفیدی برای ارزیابی عملکرد سیستم LiDAR هستند. اینها برای پلتفرمهای زمینی تطبیق داده شدهاند، همانطور که [ 30 ] هنگامی که جهتگیریهای اسکنر و موقعیتهای اسکنر متعدد را شبیهسازی کردند تا سایههای دادهها را به حداقل برسانند و معیارهایی برای تجسم تراکم نقطه در صحنههای شهری سهبعدی ایجاد کردند، نشان دادند. در [ 31 ]، یک شبیه ساز LiDAR برای انجام محک زدن MMS استفاده شد. ابزارهایی مانند Rigel’s RiACQUIRE [ 32] همچنین قابلیت آزمایش عملکرد سیستم را فراهم می کند. توانایی تعیین پارامترهای هدف و اسکنر اضافی به افزایش دقت کمک می کند.
2.2. MIMIC: ماشین حساب تراکم نقطه سیستم نقشه برداری موبایل
گرچه جهت گیری افقی و عمودی اسکنر بر روی هر سیستم در تست های محک ذکر شده در بالا متفاوت بود، این مطالعات بر بررسی تاثیر انحصاری جهت گیری اسکنر متمرکز نبودند، و بنابراین مطالعات بیشتری برای جداسازی تاثیر آن مورد نیاز است. یک سیستم نمونه اولیه که هنوز منتشر نشده است، “ماشین حساب تراکم نقطه نقشه برداری موبایل” یا “MIMIC” در مرکز ملی محاسبات جغرافیایی در دانشگاه مینوت طراحی و توسعه یافته است. MIMIC یک سیستم نوآورانه برای محاسبه توزیع نقطه و چگالی نقطه است. MIMIC و متغیرهای متعددی که باید در هنگام طراحی یک سیستم برای محاسبه چگالی نقطه در نظر گرفته شوند، برای اولین بار در [ 33 ] معرفی شدند، و فرمول ها و فرآیندهای مورد استفاده برای طراحی و اعتبار سنجی تجربی آن در [ 34 ] به تفصیل آمده است.– 37 ]. MIMIC موقعیت تئوری بهینه را محاسبه می کند که هر پالس لیزر به یک سطح برخورد می کند، و بنابراین رویدادهای تصادفی مانند انسداد، بازگشت های متعدد و انواع سطوح مختلف مدل سازی نمی شوند. هدف MIMIC ارائه ابزاری برای ارزیابی تنظیمات سختافزار MMS در مرحله برنامهریزی ماموریت یا در حین محک زدن MMS است و بنابراین یک سناریوی استاندارد (موقعیت بهینه هر پالس از لحاظ نظری) مناسب در نظر گرفته میشود. MIMIC با سخت افزارهای مختلف اسکنر، تنظیمات اسکنر، متغیرهای وسیله نقلیه و متغیرهای هدف سازگار است و اطلاعات دقیق را در قالب جدولی یا گرافیکی (با استفاده از تکنیک های درونیابی طراحی شده در [ 38 ]) برای کمک به تجسم توزیع نقطه و نمایه ارائه می دهد.
2.3. پایه های قابل تنظیم
در اکثر برگههای سختافزاری، اطلاعات بسیار کمی در مورد اهمیت جهتگیری اسکنر برای اپراتورها در دسترس است، که عمدتاً به دلیل ماهیت ثابت محفظههای سختافزار اسکن و ناوبری، مانند ([ 2 ، 9-11 ) است .]). این سیستمها برای محافظت از سختافزار MMS طراحی شدهاند، آنها را در محفظهای ضد آب و گرد و غبار نگه میدارند، از یک جابجایی ثابت بازوی اهرمی در پیکربندی اطمینان میدهند و خطر ناهماهنگی بینایی را به حداقل میرسانند. آنها همچنین حمل و نقل و نصب سخت افزار را بر روی پلتفرم های مختلف امکان پذیر می کنند و به گونه ای طراحی شده اند که کار اپراتور MMS را آسان تر کرده و فرآیند کالیبراسیون سیستم را ساده تر کند. با این حال، تعدادی از اپراتورهای MMS و سازندگان اسکنر نیاز به گنجاندن انعطافپذیری در پیکربندی سیستم خود را تشخیص دادهاند. این پایههای «تطبیقپذیر» را میتوان به مواردی تقسیم کرد که امکان تغییر جهت اسکنر را در افقی یا عمودی فراهم میکند. تا جایی که نویسندگان می دانند، هیچ پایه قابل انطباق اجازه نمی دهد جهت اسکنر در هر دو محور تغییر کند.
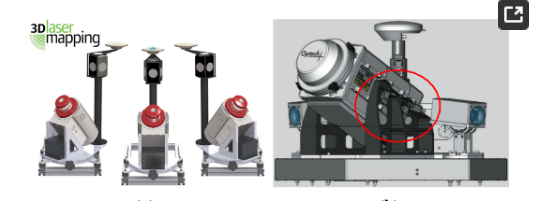
در شکل 4a یک پایه قابل انطباق طراحی شده توسط 3D Laser Mapping به کاربر اجازه می دهد تا چرخش افقی اسکنر را تنظیم کند. گیرنده GNSS و IMU نیز با اسکنر می چرخند، که به اپراتور اجازه می دهد جهت اسکنر را بدون نیاز به کالیبره مجدد سیستم تغییر دهد. آخرین MMS لایکا، Pegasus 2 [ 39 ]، همچنین دارای یک پایه قابل تطبیق است که به طور خاص برای Leica ScanStation P20 طراحی شده است و فقط چرخش های افقی را امکان پذیر می کند. اسکنر Optech نشان داده شده در شکل 4b ، M1 [ 10 ]، دارای پایه های جهت گیری قابل تنظیم برای دو حسگر LiDAR است. در [ 40 ]، نویسندگان تمایلات عمودی را با FARO LS880HE80 ترکیب کردند [ 41 ]] در یک سری آزمایش بر روی عملکرد MMS روی سیستم خود، FGI ROAMER.
3. کمی کردن تغییرات در جهت اسکنر
چرخش افقی اسکنر برد تا هدف را افزایش می دهد. چرخش عمودی اسکنر زاویه پروفایل را افزایش می دهد. چرخش اسکنر دو محوره هر دو را انجام می دهد. ما MIMIC را در یک سری آزمایش برای محاسبه فاصله پروفیل، فاصله نقطه و تعداد کل پالسهایی که به هدف برخورد میکنند و هر گونه تغییر در جهت اسکنر ممکن است منجر شود، اعمال کردیم. در این آزمایشها، زوایای چرخش محوری α، γ و β برای هدف و سطح برای اسکنر، اسکن α مربوط به زاویه افقی اسکنر است در حالی که اسکن γ به شیب عمودی اشاره دارد. برای هدف، α تارگ به چرخش افقی اشاره دارد در حالی که تارگ β به یک شیب عمودی هدف اشاره دارد. خوانندگان به [ 34] برای اطلاعات بیشتر در مورد این اصل و ماتریس های چرخش اعمال شده.
3.1. چرخش افقی
چرخش افقی اسکنر بازگشت لیزر را از سطوح عمود بر جهت حرکت تضمین می کند. یکی از نتایج این است که چرخش افقی اسکنر برد تا هدف را افزایش می دهد، همانطور که شکل 1c با افزایش 15 درجه نشان می دهد. برای تعیین کمیت آن با استفاده از MIMIC، PRR در 300 کیلوهرتز و فرکانس آینه در 100 هرتز در این آزمایشها ثابت نگه داشته شد. اینها پارامترهای یکی از بالاترین مشخصات اسکنر موجود در بازار، Riegl VQ-250 [ 42 ] بود.]، در زمان طراحی این تست ها. آزمایشهای اولیه از سرعت ثابت وسیله نقلیه 50 کیلومتر بر ساعت استفاده میکردند و هدف شبیهسازیشده 2 متر عرض و 1 متر ارتفاع بود که در فاصله 5 متری افقی ثابت از وسیله نقلیه تعریف شد. سپس چرخش افقی اسکنر با افزایش 15 درجه افزایش یافت و تعداد کل پالسهای لیزری که به هدف برخورد میکردند پس از هر تغییر چرخش اسکنر محاسبه شد. نتایج این آزمایشات در جدول 1 نمایش داده شده است. تستهای 1-4 نشان میدهند که چگونه افزایش دامنه اندازهگیری ناشی از چرخش افقی اسکنر بر تعداد نقاطی که به هدف عمودی موازی برخورد میکنند، تأثیر میگذارد. هر چه چرخش افقی اسکنر بیشتر باشد، فاصله نقاط بیشتر و در نتیجه چگالی نقطه کمتر می شود. به عنوان مثال، 60 درجهچرخش افقی اسکنر در تست 4 در مقایسه با چرخش اسکنر افقی 0 درجه در تست 1، تنها 60 درصد از تعداد نقاطی را که به هدف برخورد میکنند، نشان میدهد. این نشان میدهد که حرکت از چرخش 45 درجه به چرخش 60 درجه باعث کاهش بیشتر از حرکت از چرخش 15 درجه به چرخش 45 درجه، علیرغم اینکه چرخش دومی دارای دو برابر تغییر زاویه است. این اثر را می توان با جهت گیری سطح توضیح داد که در این آزمایش ها موازی است. همانطور که شکل 1c نشان می دهد، چرخش های بالاتر اسکنر برد را تا هدف موازی افزایش داده است و بنابراین فاصله نقاط را افزایش داده است.
3.2. شیب عمودی
چگالی نقطه نیز تحت تأثیر چرخش اسکنر عمودی است. همانطور که قبلاً نشان داده شد، چرخش اسکنر عمودی زاویه پروفایل را در سطوح عمودی تغییر می دهد و برای افزایش تعداد پروفیل هایی که یک هدف باریک را قطع می کنند مهم است. الگوریتمهای خودکاری که برای تشخیص اجسام استوانهای به حداقل فاصله پروفایل یا فاصله نقطه نیاز دارند، میتوانند از چرخشهای عمودی اسکنر برای رسیدن به این هدف استفاده کنند. چهار چرخش عمودی اسکنر برای ارزیابی اثرات آنها بر تعداد پالس هایی که به هدف برخورد می کنند، اجرا شد. یک هدف عمودی موازی با ابعاد 2 متر × 1 متر و در برد 5 متر از اسکنر تعریف شد. در این آزمایشها، اسکنر با افزایش 15 درجه شیب داشت و پس از هر چرخش تعداد کل نقاط روی هدف اندازهگیری شد. نتایج به تفصیل درجدول 2 . هر یک از چرخش های عمودی منجر به تعداد پالس های مساوی یا بیشتر از چرخش اسکنر افقی مربوطه در آزمایش های قبلی می شود. این در درجه اول به این دلیل است که شیب عمودی اسکنر منجر به تقاطع نمایه بلندتر با هدف می شود، همانطور که در شکل 5 نشان داده شده است. با هدف تقریباً 100 میلی متر مربع ، و سرعت وسیله نقلیه که منجر به فاصله پروفیل 20 میلی متری می شود، چرخش 45 درجه اسکنر منجر به تقاطع 120 میلی متری پروفیل اضافی با سطح می شود که 20 درصد افزایش می یابد.
3.3. چرخش اسکنر دو محوره
چرخش اسکنر دو محوره یکی از ویژگی های مهم نسل فعلی MMS ها است. این جهت اسکنر مزایای چرخش اسکنر افقی و عمودی را فراهم می کند. ویژگی های عمود بر جهت حرکت را می توان بررسی کرد. علاوه بر این، فاصله پروفایل در اهداف باریک کاهش می یابد. با این حال، اگر چرخش افقی اسکنر فاصله نقطه را افزایش دهد اما شیب عمودی فاصله پروفیل را کاهش دهد، بنابراین این احتمال وجود دارد که اثر از نظر چگالی نقطه نفی شود. تست های این بخش یک سری چرخش اسکنر افقی و عمودی را برای بررسی این امکان اعمال کردند.
پارامترهای وسیله نقلیه و هدف یکسان در این آزمایش ها اعمال شد. چرخش اسکنر به طور همزمان 15 درجه برای هر دو جهت اسکنر افقی و عمودی پس از هر آزمایش افزایش یافت. چهار پیکربندی اسکنر دو محوره تعریف شد و چگالی نقطه برای هدف محاسبه شد. جدول 3 نتایج این آزمایشات را برای جهت گیری های مختلف اسکنر نشان می دهد. به ازای هر افزایش در چرخش افقی و عمودی، تعداد نقاطی که به هدف برخورد می کنند، افزایش می یابد. چرخش اسکنر دو محوره 60 درجه/60 درجه افقی/عمودی قادر بود به بالاترین چگالی نقطه برسد و 4196 نقطه را برگرداند. این با نتایج قبلی در جدول 1 در تضاد است، که در آن چرخش اسکنر افقی 60 درجه منجر به محدوده اندازه گیری بالاتر و بنابراین فاصله نقاط بزرگتر و تراکم نقطه کاهش می یابد.
برای بررسی بیشتر این موضوع، یک آزمایش اضافی که در آن چرخش اسکنر افقی ثابت می ماند اما چرخش اسکنر عمودی متفاوت است، طراحی شد. در این آزمایش، چرخش اسکنر افقی روی 60 درجه تنظیم شد، اما چرخش اسکنر عمودی پس از هر آزمایش 15 درجه افزایش یافت. جدول 4جزئیات نتایج این آزمایشات از نقطه شروع کم 670 نقطه، تعداد پالس هایی که به هدف برخورد می کنند، با افزایش چرخش اسکنر عمودی به طور قابل توجهی افزایش می یابد. این به این دلیل است که چرخش عمودی اسکنر طول پروفیل را که با سطح تلاقی می کند افزایش می دهد و در نتیجه فاصله پروفیل را کاهش می دهد و تراکم نقطه را افزایش می دهد. علاوه بر این، به دلیل ترکیب چرخش افقی و شیب عمودی اسکنر، زاویه پروفیل حتی بالاتر از آن چیزی است که شیب عمودی ممکن است نشان دهد، همانطور که کار ما در [ 37 ]] نشان داده شده. این آزمایشها نشان میدهند که یک چرخش عمودی بالا میتواند افزایش فاصله نقطهای ناشی از چرخش افقی اسکنر روی این نوع هدف را خنثی کند. با این حال، با وجود چگالی نقطه بالا ناشی از این پیکربندی، ذکر این نکته مهم است که جهت افقی/عمودی 60 درجه/60 درجه برای همه اهداف مناسب نیست. به عنوان مثال، هدفی که به صورت افقی 30- درجه یا بالاتر نسبت به هدف موازی می چرخد ، هرگز با صفحه اسکن 60/60 درجه تقاطع نمی یابد، مشابه وضعیت نشان داده شده در شکل 1a.. این سناریو منجر به عدم بازگشت لیزر از هدف می شود و این یک خطر غیرقابل قبول برای یک MMS اسکنر واحد است که به صورت تجاری کار می کند زیرا می تواند منجر به بررسی مجدد یک منطقه شود. این به اپراتور MMS بستگی دارد که جهت گیری را انتخاب کند که به بهترین وجه با الگوریتم های خودکار یا مشخصات نظرسنجی آنها مطابقت دارد. در بخشهای بعدی، به برخی از مسائلی که اپراتور باید در نظر بگیرد، خواهیم پرداخت.
4. پارامترهای هدف و توزیع نقطه
از MIMIC می توان برای ارزیابی تأثیر جهت گیری اسکنر هنگامی که پارامترهای ماموریت متعدد برای یک هدف پیچیده تر تغییر می کند، استفاده کرد. در این حالت یک هدف باریک انتخاب می شود در حالی که برد هدف و سرعت وسیله نقلیه متفاوت است. تغییرات حاصل در فاصله پروفیل و فاصله نقطه بر الگوریتمهای خودکار تأثیر میگذارد که به موجب آن حداقل فاصله نقطه و فاصله پروفیل برای شناسایی یک هدف استوانهای لازم است. هنگام انتخاب جهت اسکنر لیزری MMS برای یک هدف خاص، اپراتور می تواند تصمیم بگیرد که آیا فاصله پروفایل یا فاصله نقطه را اولویت بندی کند.
4.1. به حداقل رساندن فاصله نقاط یا فاصله پروفایل؟
اهداف عمودی باریک نوع رایج زیرساخت های کنار جاده ای هستند. به حداقل رساندن فاصله نقاط عمودی و فاصله پروفیل در این ویژگی های باریک و عمودی مهم است زیرا آنها یک عامل محدود کننده بالقوه برای الگوریتم های خودکار خاص هستند. پارامترهای هدف برای این آزمایش ها تغییر داده شد و هدف 0.1 متر × 2 متر تعریف شد. یک اسکنر با فرکانس 300 کیلوهرتز PRR و فرکانس آینه 100 هرتز در MIMIC شبیه سازی شد. آزمایش ها با سرعت ثابت وسیله نقلیه 50 کیلومتر در ساعت طراحی شدند. تعداد پالس های لیزری که به هدف برخورد می کنند پس از هر 15 درجه افزایش در چرخش اسکنر عمودی اندازه گیری شد. جدول 5نتایج آزمایش های چگالی نقطه را نمایش می دهد. این تستها نشان میدهند که چگونه چگالی نقطه روی یک جسم عمودی باریک با کاهش فاصله پروفیل عمودی افزایش مییابد، زیرا پس از چرخش اسکنر عمودی 45 درجه، ضریب 33% بین تست 1 و تست 4 افزایش یافته است.
پایینترین چرخش عمودی اسکنر (15 درجه) باعث میشود که فقط بیش از 12 درصد از تعداد پروفیلهای اسکن با هدفی که چرخش 60 درجه تلاقی میکنند، انجام شود. علیرغم این عملکرد ضعیف، توجه به این نکته مهم است که تعداد زیاد پروفایلهای اسکن، تعداد بالای نقاطی را که به هدف برخورد میکنند، تضمین نمیکند. به عنوان مثال، آزمون 1 در مقایسه با آزمون 4، تنها 8.33 درصد از تعداد نمایه هایی را که با هدف تلاقی می کنند، به دست می آورد، با این حال، آزمون 1 تقریباً 74 درصد از تعداد کل نقاط آزمون 4 را دارد. با فرض توزیع مساوی نقاط در هر خط نمایه برای اهداف در بردهای کوتاه، تقریباً 41 امتیاز در هر نمایه ( P pp ) در آزمون 1 وجود دارد، اما تنها 7 P pp وجود دارد.در تست 4. این مبادله بین تعداد نمایه های اسکن که با یک هدف تلاقی می کنند و تعداد نقاط در هر نمایه را نشان می دهد. پروفیلهای اسکن کوتاهی که از هدف عبور میکنند، اگر با فاصله نقطهای بزرگ ترکیب شوند، میتوانند به ابر نقطهای منجر شوند که بهاندازه کافی هدف را نشان نمیدهد. هنگامی که اجسام بسیار باریک هستند یا در بردهای طولانی قرار دارند، این احتمال بیشتر است.
4.2. تأثیر برد بر فاصله نقاط
برای نشان دادن تأثیر دامنه بر فاصله نقاط و شناسایی تأثیر افزایش فاصله نقاط بر تعداد نقاط در هر نمایه، محدوده هدف در این آزمایشها متفاوت بود. چرخش اسکنر افقی در 60 درجه ثابت شد تا تغییر در محدوده ناشی از چرخش افقی به حداکثر برسد، در حالی که جهت اسکنر عمودی پس از هر آزمایش 15 درجه افزایش مییابد. هدف در MIMIC در سه محدوده مختلف شبیه سازی شد که در فواصل 5 متری افزایش یافت. با بررسی جدول 6 ، تأثیر افزایش فاصله نقاط بر تراکم نقاط در محدوده هدف طولانی تر قابل مشاهده است. به عنوان مثال، در برد 15 متری، 8 خط نمایه حاصل از چرخش اسکنر عمودی 15 درجه، تقریباً تنها 3 Ppp را ایجاد می کند.(تعداد امتیاز/تعداد پروفایل). این ایدهآل نیست، اما ممکن است سه نقطه ایدهای از ابعاد جسم ارائه دهد و (بسته به دقت اسکنر و راهحل ناوبری) ممکن است نشان دهد که سطح آن منحنی است یا خیر. برای چرخش عمودی 60 درجه این مورد نیست، زیرا برای 50 خط پروفیل این مقدار بیش از 1 P pp را به همراه خواهد داشت. یک نقطه در هر نمایه برای تعریف دقیق یک شی کافی نیست.
4.3. تأثیر سرعت وسیله نقلیه بر فاصله پروفیل
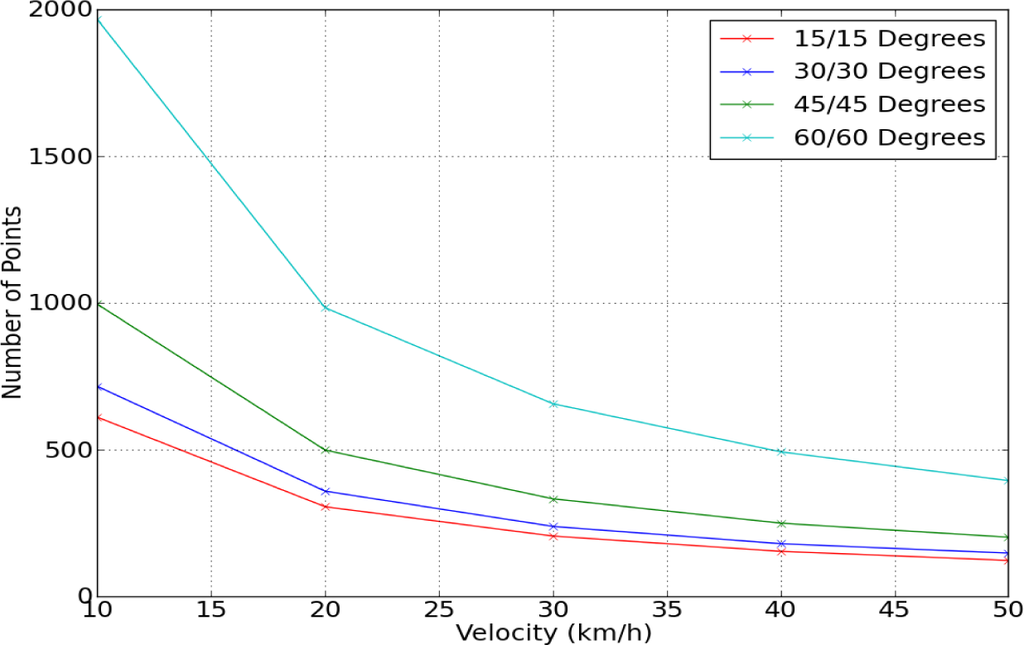
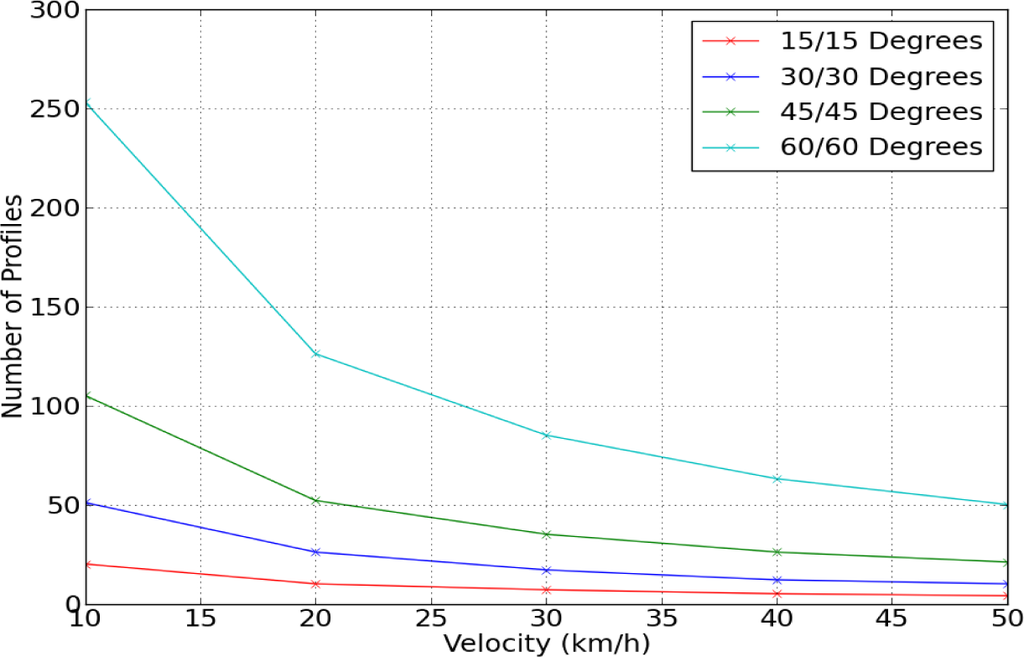
اگر یک اپراتور MMS سعی دارد نقاط را در هر نمایه و همچنین فاصله پروفایل را متعادل کند، باید سرعت خودرو را نیز در نظر بگیرد. آزمایشهای بعدی تأثیر چرخشهای اسکنر دو محوره و سرعت وسیله نقلیه را بر تراکم نقطه برای اهداف باریک بررسی کردند. سرعت وسیله نقلیه با افزایش 10 کیلومتر در ساعت افزایش می یابد و تعداد پالس هایی که به هدف برخورد می کنند پس از هر افزایش سرعت روی هدف اندازه گیری می شود. برد تا هدف برای این آزمایشها روی 5 متر ثابت تعیین شد. شکل 6نتایج محاسبه چگالی نقطه و سرعت وسیله نقلیه را روی یک هدف باریک برای انتخاب چرخشهای اسکنر دو محوره نشان میدهد. افزایش تعداد پالسهایی که از جهت اسکنر 60/60 درجه به هدف میرسند تقریباً دو برابر جهت اسکنر 45/45 درجه بود. همانطور که قبلا توضیح داده شد، این به دلیل فاصله کوچکتر پروفیل عمودی ناشی از یک زاویه با مشخصات بالا بود. برای تأیید این موضوع، دو چرخش اسکنر دو محوره مختلف و تقاطع آنها با یک سطح عمودی موازی توسط MIMIC محاسبه میشود. فاصله پروفیل و زاویه پروفیل اندازه گیری شد. تفاوت زاویه پروفیل بین این دو 19.10 درجه بود و این معادل تفاوت در فاصله پروفیل 0.058 متر در یک هدف عمودی است، اما 0.058 متر می تواند برای اهداف باریک قابل توجه باشد.
توجه به این نکته مهم است که در محدوده های کوتاه تر، کاهش Ppp ممکن است مشکلی نباشد . برای نشان دادن این، آزمایشی برای اندازه گیری Ppp برای یک هدف باریک با استفاده از چهار چرخش اسکنر دو محوره مختلف طراحی شد. برد هدف 5 متر و سرعت وسیله نقلیه 50 کیلومتر بر ساعت اعمال شد. جدول 7 تعداد P pp را برای این تست ها فهرست می کند. شش کمترین تعداد Ppp است که در این تست ها اتفاق می افتد. این در تست 4 رخ می دهد، که چرخش دو محور 60 درجه/60 درجه است و بنابراین بیشترین تعداد پروفیل ها را دارد. اگرچه تعداد P ppاز 15 درجه / 15 درجه چرخش دو محور پنج برابر این مقدار است، شش نقطه برای تعریف یک جسم باریک تنها 0.1 متر عرض کافی است. برعکس، چرخش 15 درجه/15 درجه بیشترین تعداد Ppp را فراهم می کند ، اما این باید با تعداد پروفایل های اسکنی که ممکن است توسط یک الگوریتم خودکار مورد نیاز باشد، جبران شود. شکل 7 تعداد پروفایل های اسکن روی یک هدف را با سرعت های مختلف برای هر جهت اسکنر در جدول 7 نشان می دهد. با افزایش سرعت، تعداد پروفایل های اسکن برای هر چرخش اسکنر دو محوره به طور قابل توجهی کاهش می یابد و پیوند بین سرعت و فاصله پروفیل را تقویت می کند.
همانطور که نشان داده شد، هنگام طراحی یک سیستم برای به حداکثر رساندن تراکم نقطه، یک مبادله بین تعداد پروفایل های اسکن که یک هدف باریک را قطع می کنند و همچنین تعداد Ppp وجود دارد. تراکم نقطه بالا ممکن است به طور دقیق هدف را تعریف نکند اگر تعداد P pp باشدخیلی کم است، یا اگر فاصله پروفایل خیلی زیاد باشد. تعدادی از عوامل بر تراکم نقطه تأثیر می گذارد: پارامترهای سیستم، پارامترهای هدف و پارامترهای خودرو. همچنین باید به آن دسته از جهت گیری های هدف توجه شود که هیچ امتیازی برای جهت گیری های اسکنر خاص به دست نمی آورند. بنابراین، هنگام طراحی یک سیستم اسکنر ثابت، پیکربندی جهت اسکنر یک تصمیم بسیار مهم است. این تصمیمی است که میتواند باعث شود تولیدکنندگان برای اطمینان از اینکه MMS در اکثر سناریوها به طور کارآمد عمل میکند، احتیاط کنند. از طرف دیگر، شامل یک اسکنر دوم تا حد زیادی این خطرات را نفی می کند. اسکنر دوم تعداد بازگشت از یک هدف را افزایش میدهد و سایههای دادهها را به حداقل میرساند، اما همچنین منجر به طولانیتر شدن زمان پردازش دادهها، افزایش هزینههای سختافزاری و نیازهای بالاتر ذخیرهسازی دادهها میشود.
5. شناسایی جهت گیری بهینه
تعیین کمیت توزیع نقطه مورد نیاز برای تشخیص یک شی در یک ابر نقطه دشوار است، و بنابراین این بخش اثر ترکیب تمایلات اسکنر عمودی بالا با چرخش های اسکنر افقی کم را خلاصه می کند. یک اپراتور انسانی نسبت به یک الگوریتم خودکار به نقاط کمتری برای تشخیص یک شی نیاز دارد. تحقیق ارائه شده در [ 15-18 ، 20 ، 21 ، 24-27 ] پیچیدگی این مشکل را نشان می دهد . هر الگوریتم عملکرد متفاوتی دارد. دقت هر کدام متفاوت است و الگوریتم های زیادی برای یک ویژگی خاص (درختان، ساختمان ها، خط کشی جاده ها، لبه های جاده و غیره ) طراحی شده اند.). توسعه الگوریتم به مرحلهای نرسیده است که بتوانیم الزامات توزیع نقطه را به طور قطع بیان کنیم، و بنابراین ما لزوماً بر ارائه اطلاعات در مورد پیامدهای پشت تغییرات در جهتگیری اسکنر تمرکز کردهایم، به طوری که نتایج ما بتواند به بهینهسازی جهت اسکنر کمک کند.
این آزمایش ها بررسی کردند که آیا این پیکربندی عملی تری برای یک محیط دنیای واقعی پویا است یا خیر. تعدادی از روندها هنگام بررسی نتایج آشکار بود.
- با افزایش چرخش عمودی و افقی اسکنر دوگانه به میزان 15 درجه (مثلاً 15 درجه/15 درجه تا 30 درجه/30 درجه)، چگالی نقطه تقریباً دو برابر می شود.
- با افزایش چرخش عمودی و افقی اسکنر دوگانه به میزان 15 درجه، تعداد پروفیل ها تقریباً دو برابر می شود.
- با دو برابر شدن سرعت، چگالی نقطه تقریباً نصف می شود.
- با دو برابر شدن دامنه، چگالی نقطه حاصل تقریباً نصف می شود.
هنگام انتخاب چرخش اسکنر افقی برای تست های این بخش، دو عامل مهم باید در نظر گرفته می شد. اولاً، چرخشهای افقی بالاتر ( ≥ 60 درجه) اسکنر به طور بالقوه میتواند سطحی را که از MMS زاویه دارد (≥-30 درجه) از دست بدهد . علاوه بر این، یک چرخش افقی کم (15 درجه) باعث می شود نقاط بسیار کمی به سطح عمود بر جهت حرکت برخورد کنند، که دلیل اصلی برای معرفی چرخش افقی اسکنر است. به این دلایل، چرخش اسکنر افقی 30 درجه و 45 درجه انتخاب شد در حالی که شیب اسکنر عمودی 30 درجه، 45 درجه و 60 درجه انتخاب شد. یک × 2 مترهدف عمودی موازی 1 متر برای این آزمایش ها تعریف شد. برد هدف 5 متر و سرعت وسیله نقلیه 50 کیلومتر بر ساعت تعیین شد. یک اسکنر که در 300 کیلوهرتز PRR و فرکانس آینه 100 هرتز کار می کند نیز در MIMIC تعریف شده است.
سپس چگالی نقطه برای هر جهت اسکنر محاسبه شد. این نتایج چگالی نقطهای ارزیابی شد تا مشخص شود آیا پیکربندیهای مشخصشده بهتر از پیکربندیهای 30/30 درجه و 45 درجه/45 درجه استفاده شده در بخشهای قبلی عمل میکنند. برای هر ترکیب چرخش اسکنر، افزایش چرخش عمودی اسکنر منجر به افزایش تراکم نقطه شد. با ترکیب یک چرخش افقی 45 درجه با یک چرخش عمودی 60 درجه، تعداد نقاطی که به هدف برخورد می کنند از 10188 به 14343 نقطه روی هدف در مقایسه با جهت گیری 45 درجه / 45 درجه افزایش یافت. این معادل 40 درصد افزایش است و همچنین خطر از دست دادن یک هدف با چرخش منفی را که با چرخش اسکنر افقی 60 درجه ایجاد می شود، کاهش می دهد. علاوه بر این،شکل 8 نتایج این آزمایش ها را نشان می دهد.
این نتایج وابسته به هدف و سیستم خاص هستند. برای اهداف موازی استاندارد مانند دیوارها یا نمای ساختمان، اسکن α / γ اسکن 45 درجه/60 درجه جهت گیری توصیه شده برای زیرساخت های نزدیک است. این جهت گیری به ویژه برای به حداکثر رساندن تراکم نقطه با MMS های تک اسکنر مرتبط است. اسکن α 45 درجه ، تعداد پروفیل هایی را که با اجسام عمود بر جهت حرکت متقاطع می شوند، افزایش می دهد، اما اسکن α بیش از حد را ایجاد نمی کند که به طور بالقوه می تواند منجر به بازده صفر در اهداف منفی شود. اسکن 60 درجه γفاصله پروفیل عمودی را کاهش می دهد و در نتیجه چگالی نقطه را افزایش می دهد. با این حال، برای چندین هدف زاویه دار ممکن، جهت گیری توصیه شده ممکن است تغییر کند. MIMIC امکان بررسی جهت گیری ها و ابعاد چندگانه هدف را فراهم می کند. بنابراین MIMIC می تواند اطلاعات پیکربندی توصیه شده برای هر هدف معتبر تعریف شده توسط کاربر را در اختیار نقشه بردار قرار دهد.
6. نتیجه گیری
آزمایشات ما نشان داد که جهت گیری اسکنر به طور قابل توجهی بر توزیع نقطه و نمایه تأثیر می گذارد. تغییر شیب عمودی اسکنر روشی را برای افزایش تعداد پالس هایی که به هدف برخورد می کنند با به حداکثر رساندن طول پروفیل اسکن که با سطح تلاقی می کند، فراهم می کند. تغییر چرخش افقی اسکنر باعث افزایش برد تا هدف و در عین حال افزایش فاصله نقاط می شود. اهمیت شناسایی مبادله صحیح بین تعداد پروفیل های متقاطع با هدف و فاصله نقطه نیز هنگام اعمال چرخش اسکنر دو محوره نشان داده شد. انتخاب یک جهت اسکنر دو محوره که چگالی نقطه، فاصله نقطه یا فاصله پروفیل را برای یک هدف بهینه می کند، به طور اجتناب ناپذیری منجر به کاهش این مقادیر برای سایر انواع هدف می شود. “Catch-all” برای تعیین جهت های اسکنر افقی و عمودی متوسط است که به حداقل کردن سایه کمک می کند و توزیع نقطه ای قابل قبولی را ارائه می دهد. با این حال، در سناریویی که یک الگوریتم برای استخراج خودکار ویژگی ها از ابر نقطه طراحی شده است، برای اپراتور منطقی است که سیستم را پیکربندی کند تا بهترین شانس برای دستیابی به توزیع نقطه مورد نیاز را که به آن الگوریتم اجازه عملکرد می دهد، تضمین کند. اپراتور MMS همچنین می تواند اطمینان حاصل کند که سیستم آنها می تواند کوچکترین ویژگی را در یک سند مشخصات نظرسنجی یا سند مناقصه ثبت کند. اگر ورودی دستی اپراتور برای سایر اهداف مورد نیاز باشد، می توان به توزیع نقطه اجازه داد در این مناطق کاهش یابد اما در مناطق دیگر افزایش یابد تا از عنصر خودکار استفاده شود. در این مقاله نشان دادهایم که اگر سختافزار اسکن سرعت آینهای بالایی داشته باشد، اپراتور میتواند از این مزیت استفاده کند و فاصله نقاط را در اولویت قرار دهد. همچنین نشان داده شده است که اگر اسکنر دارای نرخ تکرار پالس بالایی باشد، به موجب آن اپراتور با استفاده از دانش خود از سیستم و الگوریتمها، میتواند مورد نیاز را در نقاط هر نمایه در برابر تعداد پروفایلهایی که هدف را قطع میکنند، متعادل کند. MIMIC یک ابزار حیاتی است که می تواند برای تعیین کمیت تغییرات در پیکربندی سیستم در عملکرد MMS استفاده شود.
منابع
- الشیمی، ن. مروری بر سیستم های نقشه برداری سیار، مجموعه مقالات هفته کاری FIG 2005 و GSDI-8—از فراعنه تا ژئوانفورماتیک، FIG/GSDI، قاهره، مصر، 16-21 آوریل 2005.
- نقشه برداری لیزری سه بعدی، گزارش فنی StreetMapper ، در دسترس آنلاین: http://www.3dlasermapping.com/downloads/brochures قابل دسترسی در 5 اکتبر 2012.
- کاهلان، سی. مک کارتی، تی. McElhinney، CP عملکرد سیستم نقشه برداری موبایل: بررسی اولیه در مورد تأثیر سرعت خودرو بر خطوط اسکن لیزری، مجموعه مقالات کنفرانس سالانه انجمن سنجش از دور و فتوگرامتری – “از بستر دریا تا ابرها”، کورک، ایرلند، 1- 3 سپتامبر 2010.
- GISPro. برگه داده MMS با قابلیت GPR ، در دسترس آنلاین: http://www.riegl.com/fileadmin/user_upload/Press/Mobile_Mapping_System.pdf در 9 اکتبر 2014 قابل دسترسی است.
- ویلیامز، ک. اولسن، ام جی; Roe، GV; Glennie, C. سنتز برنامه های کاربردی حمل و نقل موبایل LIDAR. Remote Sens. 2013 , 5 , 4652–4692. [ Google Scholar ]
- فلنر، سی. واجا، م. جااکولا، ا. کروکس، آ. کارتینن، اچ. کوکو، ا. کسوی، ای. هایپا، اچ. Hyyppä، J.; Alho, P. نقشه برداری بدون درز از کانال های رودخانه با وضوح بالا با استفاده از LiDAR موبایل و UAV-Photography. Remote Sens. 2013 , 5 , 6382–6407. [ Google Scholar ]
- سارینن، ن. واستارانتا، م. واجا، م. لوثاری، ا. جااکولا، ا. کوکو، ا. کارتینن، اچ. هولوپاینن، م. هایپا، اچ. Alho، P. رویکرد مبتنی بر منطقه برای نقشه برداری و نظارت بر پوشش گیاهی رودخانه با استفاده از اسکن لیزری سیار. Remote Sens. 2013 , 5 , 5285–5303. [ Google Scholar ]
- مک آردل، جی. دمشار، یو. ون در اسپک، اس. مکلون، اس. طبقهبندی رفتار حرکتی عابر پیاده از مسیرهای GPS با استفاده از تجسم و خوشهبندی. ان GIS. 2014 ، 20 ، 85-98. [ Google Scholar ]
- ریگل. برگه داده اسکنر دوگانه Riegl VMX-450 ، موجود آنلاین: http://www.riegl.com/nc/products/mobile-scanning/produktdetail/product/scannersystem/10/ در 9 اکتبر 2012 قابل دسترسی است.
- Optech. مشخصات سیستم Optech Lynx M1 و V200 ، در دسترس آنلاین: http://www.optech.ca/lynx.htm در 9 اکتبر 2012 قابل دسترسی است.
- تریمبل. سیستم نقشهبرداری موبایل Trimble MX8 ، در دسترس آنلاین: http://www.trimble.com/geospatial/Trimble-MX8.aspx?dtID=overview در 9 اکتبر 201 مشاهده شد.
- ین، دبلیو. روانی، ب. Lasky، T. LiDAR برای بهره وری داده ، در دسترس آنلاین: http://www.wsdot.wa.gov/Research/Reports/700/778.1.htm در 5 اکتبر 2011 قابل دسترسی است.
- وزارت حمل و نقل فلوریدا رهنمودهای نقشه برداری و نقشه برداری LiDAR موبایل زمینی ; وزارت حمل و نقل فلوریدا: تالاهاسی، فلوریدا، ایالات متحده آمریکا، 2012. در دسترس آنلاین: http://www.dot.state.fl.us/surveyingandmapping/regulations.shtm در 5 اکتبر 2012 قابل دسترسی است.
- اولسن، ام جی; رو، جی. گلنی، سی. پرسی، اف. ریدی، م. هورویتز، دی. ویلیامز، ک. توس، اچ. Squellati، A. Knodler, M. NCHRP 15-44 Guidelines for Use of Mobile LiDAR in Transportation Applications ; NCHRP: واشنگتن، دی سی، ایالات متحده آمریکا، 2013. در دسترس آنلاین: http://apps.trb.org/cmsfeed/TRBNetProjectDisplay.asp?ProjectID=2972 در 3 آوریل 2013 قابل دسترسی است.
- بکر، اس. Haala, N. Grammar از بازسازی نما از نقشه برداری LiDAR موبایل پشتیبانی می کند. بین المللی قوس فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2009 ، 38 ، 229-234. [ Google Scholar ]
- حمودی، ک. دورنایکا، اف. پاپرودیتیس، N. استخراج ردپای ساختمان از ابرهای نقطه سه بعدی با استفاده از اسکن لیزری زمینی در سطح خیابان. بین المللی قوس فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2009 ، 38 ، 65-70. [ Google Scholar ]
- McElhinney، CP; کومار، پی. کاهلان، سی. McCarthy, T. نتایج اولیه از پروژه نقشه برداری سیار بازرسی ایمنی جاده اروپا (EURSI)، مجموعه مقالات سمپوزیوم فنی کمیسیون پنجم ISPRS، نیوکاسل، بریتانیا، 22-24 ژوئن 2010.
- کومار، پی. McElhinney، CP; لوئیس، پی. مک کارتی، تی. استخراج خودکار علائم جاده از داده های اسکن لیزری موبایل. بین المللی J. Appl. زمین Obs. Geoinf. 2014 ، 32 ، 125-137. [ Google Scholar ]
- کومار، پی. McElhinney، CP; لوئیس، پی. McCarthy, T. یک الگوریتم خودکار برای استخراج لبه های جاده از داده های LiDAR موبایل زمینی. ISPRS J. Photogramm. Remote Sens. 2013 ، 85 ، 44-55. [ Google Scholar ]
- پو، اس. Vosselman, G. استخراج پنجره ها از اسکن لیزری زمینی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2007 ، 36 ، 320-325. [ Google Scholar ]
- پو، اس. روتزینگر، ام. ووسلمن، جی. Elberink، S. شناخت ساختارهای اساسی از دادههای اسکن لیزری سیار برای مطالعات موجودی جاده. ISPRS J. Photogramm. Remote Sens. 2011 ، 66 ، 28-39. [ Google Scholar ]
- کارتینن، اچ. Hyyppä، J.; گلچ، ای. ووسلمن، جی. هایپا، اچ. ماتیکاینن، ال. هافمن، AD; مادر، U. Perssion،، Å; سودرمن، یو. و همکاران دقت مدل های شهر سه بعدی: مقایسه EuroSDR. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2005 ، 36 ، 227-232. [ Google Scholar ]
- لاری، ز. حبیب، الف. روشهای جایگزین برای تخمین شاخص چگالی نقطه محلی: حرکت به سمت پردازش دادههای LiDAR تطبیقی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2012 ، 39 ، 127-132. [ Google Scholar ]
- برنر، سی. بومی سازی جهانی وسایل نقلیه با استفاده از الگوهای قطب محلی. Pattern Recognit 2009 ، 5748 ، 61-70. [ Google Scholar ]
- کوکو، ا. جااکولا، ا. لهتوماکی، ام. کارتینن، اچ. Chen, Y. سیستم نقشه برداری موبایل و روش های محاسباتی برای مدل سازی محیط جاده، مجموعه مقالات رویداد سنجش از دور شهری مشترک، شانگهای، چین، 20-22 مه 2009.
- لهتوماکی، ام. جااکولا، ا. Hyyppä، J.; کوکو، ا. کارتینن، اچ. تشخیص اشیاء قطب مانند عمودی در محیط جاده با استفاده از دادههای اسکن لیزری مبتنی بر وسیله نقلیه. Remote Sens. 2010 , 2 , 331-336. [ Google Scholar ]
- وو، بی. یو، بی. یو، دبلیو. شو، اس. تان، دبلیو. هو، سی. هوانگ، ی. وو، جی. لیو، اچ. یک روش مبتنی بر وکسل برای شناسایی خودکار و تخمین پارامترهای مورفولوژیکی تک تک درختان خیابان از دادههای اسکن لیزری متحرک. Remote Sens. 2013 ، 5 ، 584-611. [ Google Scholar ]
- لین، ی. Hyyppä، J.; کارتینن، اچ. Kukko، A. تجزیه و تحلیل عملکرد سیستم های اسکن لیزری سیار در نمایش هدف. Remote Sens. 2013 , 5 , 3140–3155. [ Google Scholar ]
- لوهانی، ب. Mishra, R. تولید داده های LiDAR در آزمایشگاه: شبیه ساز LiDAR. بین المللی قوس. فتوگرام Remote Sens. 2007 ، 52 ، 12-14. [ Google Scholar ]
- یو، اچ. گولت، اف. سنپاوروکا، جی. Lepere, G. تجزیه و تحلیل مقایسه ای مبتنی بر شبیه سازی برای طراحی نقشه برداری لیزری زمینی سیار، مجموعه مقالات ششمین سمپوزیوم بین المللی فناوری نقشه برداری موبایل، سائو پائولو، برزیل، 21-24 ژوئیه 2009. صص 839-854.
- کوکو، ا. Hyyppä, J. شبیهساز اسکن لیزری با ردپای کوچک برای اعتبارسنجی سیستم، ارزیابی خطا و توسعه الگوریتم. فتوگرام مهندس Remote Sens. 2009 ، 75 ، 1177-1189. [ Google Scholar ]
- ریگل. برگه داده نرم افزار RiACQUIRE ، موجود به صورت آنلاین: http://products.rieglusa.com/item/software-packages/riacquire-data-acquisition-software/item-1011 در 11 اکتبر 2012 قابل دسترسی است.
- کاهلان، سی. McElhinney، CP; لوئیس، پی. McCarthy، T. MIMIC: ماشین حساب تراکم نقطه نگاشت موبایل، مجموعه مقالات سومین کنفرانس بین المللی محاسبات برای تحقیقات و کاربردهای جغرافیایی (COM.Geo ’12).
- کاهلان، سی. McElhinney، CP; لوئیس، پی. مک کارتی، تی. محاسبه توزیع نقطه هدف خاص برای اسکنرهای لیزری متحرک دو بعدی. Sensors 2014 , 14 , 9471-9488. [ Google Scholar ]
- کاهلان، سی. McElhinney، CP; لوئیس، پی. McCarthy، T. MIMIC: یک روش ابتکاری برای تعیین چگالی نقطه سیستم اسکن لیزری سیار. Remote Sens. 2014 , 6 , 7857–7877. [ Google Scholar ]
- کاهلان، سی. McElhinney، CP; McCarthy، T. عملکرد سیستم نقشه برداری موبایل: تجزیه و تحلیل اثر پیکربندی اسکنر لیزری و سرعت وسیله نقلیه بر پروفایل های اسکن، مجموعه مقالات انجمن نقشه برداری لیزری اروپا (ELMF 2010)، لاهه، هلند، 30 نوامبر تا 1 دسامبر 2010.
- کاهلان، سی. McElhinney، CP; مک کارتی، تی. محاسبه تأثیر چرخشهای اسکنر دو محوره و جهتگیری سطح روی پروفایلهای اسکن، مجموعه مقالات هفتمین سمپوزیوم بینالمللی فناوری نقشهبرداری موبایل (MMT11)، کراکاو، لهستان، 13-16 ژوئن 2011.
- Shepard, D. تابع درونیابی دو بعدی برای داده های با فاصله نامنظم، مجموعه مقالات بیست و سومین کنفرانس ملی ACM، نیویورک، نیویورک، ایالات متحده آمریکا، 27-29 اوت 1968. صص 517-524.
- لایکا برگه داده لایکا پگاسوس ، در دسترس آنلاین: http://www.leica-geosystems.com/en/Leica-PegasusTwo_105371.htm در 9 اکتبر 2014 قابل دسترسی است.
- کوکو، ا. آندری، CO; Salminen، VM; کارتینن، اچ. چن، ی. رونهولم، پی. هایپا، اچ. Hyyppä، J.; چن، آر. هاگرن، اچ. و همکاران سیستم نقشه برداری محیط راه موسسه ژئودتیک فنلاند-FGI Roamer. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2007 ، 36 ، 241-247. [ Google Scholar ]
- فارو. Faro LS880 DataSheet ، در دسترس آنلاین: http://www.faro.com/FAROIP/Files/File/TechSheets/SEALaserScanner880.htm در 9 اکتبر 2014 قابل دسترسی است.
- ریگل. برگه داده اسکنر دوگانه Riegl VQ-250 ، موجود آنلاین: http://www.riegl.com/nc/products/mobile-scanning/produktdetail/product/scannersystem/22/ در 9 اکتبر 2012 قابل دسترسی است.





© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر