

خلاصه
تولید اطلاعات قابل اعتماد برای بهبود درک دینامیک مخازن برق آبی برای هدایت تصمیم گیرندگان برای اجرای بهترین شیوه های مدیریتی اساسی است. به این ترتیب، ما عملکرد الگوریتمهای درونیابی مختلف را برای نقشهبرداری عمق سنجی مخزن برق آبی Tucuruí، واقع در آمازون برزیل، به عنوان کمکی برای مدیریت و بهرهبرداری از مخازن آمازون ارزیابی کردیم. ما سه الگوریتم قطعی و یک الگوریتم زمین آماری مختلف را ارزیابی کردیم. عملکرد الگوریتم ها از طریق اعتبارسنجی متقابل و شبیه سازی مونت کارلو ارزیابی شد. در نهایت، اطلاعات عملیاتی از شبکه عمق سنجی با بهترین عملکرد استخراج شد. نتایج نشان داد که تمامی روشهای درونیابی قادر به ترسیم ویژگیهای مهم عمق سنجی بودند. بهترین عملکرد با روش زمین آماری (RMSE = 0.92 متر) به دست آمد. اطلاعات به دست آمده از نقشه عمق سنجی (به عنوان مثال، نمودار سطح سطح و حجم حجم و شبکه سه بعدی) امکان بهینه سازی نظارت عملیاتی مخزن برق آبی Tucuruí و همچنین توسعه مطالعات مدل سازی سه بعدی را فراهم می کند.
کلید واژه ها:
نقشه برداری ؛ مخزن ; ارزیابی محیط زیست ; مدیریت محیط زیستی
1. معرفی
ویژگی های عمق سنجی و مورفومتریک مخازن بر بسیاری از فرآیندها (به عنوان مثال، اختلاط، جریان) تأثیر می گذارد، که در سطح آب و در ستون آب رخ می دهد [ 1 ]. به این ترتیب، نقشه برداری دقیق عمق سنجی برای هیدرودینامیک [ 2 ] و کیفیت آب [ 3 ] اهمیت اساسی دارد.] مطالعات مدل سازی در محیط های آبی. علاوه بر این، نقشه عمق سنجی منبع داده مهمی است که امکان استخراج اطلاعات ارزشمند (به عنوان مثال، نمودارهای سطح و حجم سطح، ظرفیت تولید) مورد استفاده برای نظارت عملیاتی مخازن را فراهم می کند. با این وجود، این نوع اطلاعات برای اکثر مخازن آمازون وجود ندارد، که از مطالعات دقیق گردش آب و کیفیت و در نتیجه بهینه سازی عملیاتی جلوگیری می کند. در این زمینه، ارزیابی روش های موجود برای تولید اطلاعات عمق سنجی قابل اعتماد هنوز برای مخازن آمازون مورد نیاز است.
در حال حاضر، روشهای مختلفی در ادبیات شرح داده شده است که برای تولید نقشههای عمق سنجی استفاده میشود، مانند روشهای درونیابی فضایی بر اساس نمونههای عمقی جمعآوریشده [ 4 ]، روشهای مبتنی بر دادههای توپوگرافی [ 5 ] و روشهای مبتنی بر سنجش از دور [ 6 ، 7 ]. ]. در بین روش های ذکر شده در بالا، روش های درون یابی فضایی بیشترین استفاده را برای به دست آوردن نقشه های عمق سنجی دارند [ 4 ، 8 ، 9 ]]. روشهای مبتنی بر دادههای توپوگرافی، نقشهبرداری از عمق سنجی مخازن را به راحتی در مقایسه با روشهای دیگر امکانپذیر میسازد. با این حال داده های توپوگرافی باید قبل از پر کردن مخزن جمع آوری شود و این نوع داده ها همیشه در دسترس نیستند. روشهای مبتنی بر سنجش از دور از نظر پوشش مناطق بزرگ و جمعآوری دادهها در مناطق با دسترسی محدود مانند منطقه آمازون مزیت دارند. با این حال، روش های مبتنی بر سنجش از دور توسط شفافیت آب، عمق مخزن و شرایط هواشناسی ( به عنوان مثال ، وجود پوشش ابر)، که مانع استفاده از آن در بیشتر مخازن آمازون می شود، محدود می شود.
در حال حاضر بیش از 40 روش درونیابی فضایی در ادبیات شرح داده شده است که به انواع قطعی، زمین آماری و ترکیبی طبقه بندی می شوند [ 10 ]. تعدادی از این روش ها عمدتاً در علوم محیطی مورد استفاده قرار گرفته اند. با این حال، عوامل زیادی (به عنوان مثال، حجم نمونه و ماهیت داده ها) بر تخمین یک درون یابی فضایی تأثیر می گذارد و تاکنون هیچ یافته ثابتی در مورد اینکه بهترین روش درونیابی چیست، وجود ندارد. به عنوان مثال، آزپوروا و دوس راموس [ 11 ] نشان دادند که وزن دهی معکوس فاصله (IDW)، یک روش قطعی، به احتمال زیاد بهترین تخمین یک سطح پیوسته را از قدر متوسط شدت میدان الکتریکی ایجاد می کند. از سوی دیگر، منگ و همکاران. [ 12] نشان داد که در برخی موارد، روشهای قطعی مانند IDW و تابع پایه شعاعی (RBF)، نتایج بهتری نسبت به روشهای زمینآماری مانند کریجینگ معمولی (OK) نشان میدهند و در شرایط دیگر، روشهای زمینآماری بهترین نتایج را نشان میدهند. این واقعیت نشان دهنده اهمیت ارزیابی روش درونیابی برای هر مجموعه داده و مورد خاص است.
برای درونیابی داده های عمق سنجی، اتفاق نظری در مورد اینکه کدام روش بهترین نتایج را ارائه می دهد وجود ندارد. Bello-Pineda و Hernández-Stefanoni [ 8 ] نشان دادند که روش کریجینگ مناسب ترین روش برای نقشه برداری عمق سنجی سکوی غوطه ور یوکاتان است. برعکس، مرواد و همکاران. [ 9] دریافت که روش های قطعی، مانند IDW بیضوی، در مقایسه با روش های زمین آماری، مانند OK، می توانند نتایج بهتری ارائه دهند. با توجه به موارد فوق، این کار با هدف ارزیابی روشهای مختلف درونیابی فضایی (هم زمین آماری و هم قطعی) برای تولید نقشههای عمق سنجی قابل اعتماد از مخازن هیدروالکتریک آمازون است. در مرحله دوم، هدف ما استخراج اطلاعاتی است که به مطالعات مدلسازی سه بعدی و بهینهسازی مدیریت و بهرهبرداری از مخازن برق آبی آمازون کمک میکند.
2. مواد و روشها
2.1. منطقه مطالعه
منطقه انتخاب شده برای این مطالعه شامل مخزن هیدروالکتریک Tucuruí (THR) است که بین مختصات 3.755 درجه جنوبی قرار دارد. 49.528 درجه غربی و 5.007 درجه جنوبی؛ 49.587 درجه غربی، ایالت پارا، آمازون برزیل ( شکل 1 ). این منطقه بخشهایی از هفت شهرستان در جنوب شرقی پارا را در بر میگیرد: نوو جاکوندا، نوو پارتیمنتو، نوو برو برانکو، نوا ایپیکسونا، ایتوپیرانگا، گویانزیا دو پارا و توکوروئی.
THR بین سالهای 1960 و 1980 با سد کردن رودخانه توکانتینز برنامهریزی و ساخته شد و منطقه وسیعی از جنگلهای بارانی استوایی را زیر آب گرفت [ 8 ]. توپوگرافی و مورفولوژی منطقه منجر به شکل درازی از مخزن، از شمال به جنوب، حدود 150 کیلومتر طول و 20 کیلومتر در عرض شد. THR دارای مساحت 2918 کیلومتر مربع ( سطح آب 74 متر بالاتر از سطح دریا)، حجم کل 50.3 میلیارد متر مکعب [ 13 ] و زمان اقامت در حدود 51 روز است [ 14 ].
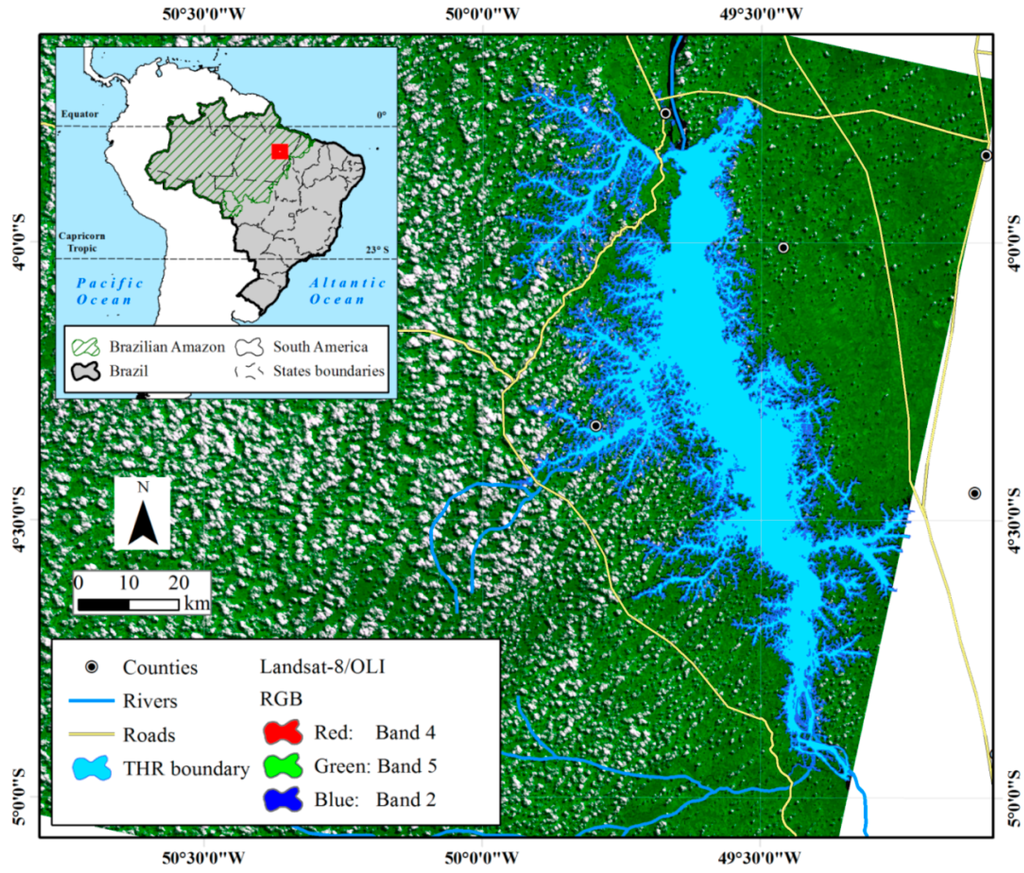
شکل 1. منطقه مطالعه: محل THR در آمازون برزیل.
2.2. مجموعه داده نمونه های عمقی
نمونههای عمق طی یک بررسی میدانی که در THR از 3 تا 16 ژوئیه 2013 انجام شد، جمعآوری شد. انتخاب دوره برای اجرای بررسی میدانی، از جمله عوامل دیگر، بر اساس سطح مخزن بود که نزدیک به حداکثر سطح عملیاتی بود. بررسی میدانی
بررسی عمق سنجی دو مرحله داشت: (1) برنامه ریزی و (2) جمع آوری داده ها. بررسی عمق سنجی از پروتکل های توصیف شده توسط [ 15 ، 16 ] پیروی می کند. برنامه ریزی بررسی میدانی با استفاده از تصویر Landsat-8 انجام شد که توسط حسگر عملیاتی زمین تصویرگر (OLI) [ 17 ]، Google Earth® [ 18 ] به دست آمد.] و یک سیستم اطلاعات جغرافیایی (GIS). هدف این روشها بهینهسازی زمان و هزینههای بررسی میدانی، حصول اطمینان از نمونهبرداری از تمام مناطق مورد علاقه و جمعآوری دادههای اضافی بود. مسیرها با در نظر گرفتن تعداد زیاد جزایر و درختان خشکیده در مخزن تعریف شده است، واقعیتی که ایمنی دریانوردی را به ویژه در شرایط بادهای متوسط و شدید پیچیده و به خطر می اندازد. کل مسیر برنامه ریزی شده برای یک روز کاری با در نظر گرفتن میانگین سرعت سفر 20 کیلومتر بر ساعت -1 و حداکثر 11 ساعت کار در همان روز (06:00 تا 17:00 ساعت) تعریف شده است. در طول بررسی، نمونههای عمق با استفاده از یک اکوباتیمتر مدل GPSmap 520s Garmin جمعآوری شد .(Olathe، KS، ایالات متحده آمریکا). این اکوباتیمتر در دو فرکانس (50 هرتز و 200 هرتز) کار می کند و دارای دقت عمودی ± 0.1 متر می باشد. این تجهیزات برای جمع آوری و ذخیره نمونه های عمقی هر 2 ثانیه با استفاده از سیستم مختصات جغرافیایی و سیستم جهانی ژئودتیک 1984 (WGS-84) به عنوان مبدأ برنامه ریزی شده بود. مسیرهای عمق سنجی در حافظه اکوباتیمتر ذخیره شده و به عنوان مرجع ناوبری در طول جمع آوری داده ها مورد استفاده قرار گرفتند.
2.3. روش درون یابی
روش درونیابی به روش زیر انجام شد. ابتدا، نمونههای عمق، شامل طول و عرض جغرافیایی، طول و عمق، از حافظه داخلی اکوباتیمتر بهعنوان یک فایل متنی (txt.) با استفاده از نرمافزار MapSource® صادر شد. مرحله پیش پردازش با استفاده از صفحه گسترده مایکروسافت اکسل انجام شد و با هدف تصحیح نمونه های عمق قبل از درونیابی فضایی انجام شد. ما مقادیر عمق را به حداکثر سطح عملیاتی (74 متر بالاتر از سطح دریا) بر اساس سطح مخزن در روزهای بررسی میدانی اصلاح کردیم. سطح مخزن به صورت آنلاین با فرکانس روزانه توسط شرکتی که مخزن را اداره می کند در دسترس است [ 19 ]. پس از مرحله پیش پردازش، تجزیه و تحلیل داده های فضایی اکتشافی (ESDA) [ 20] با مجموعه داده های نمونه عمق انجام شد. ESDA با استفاده از نوار ابزار ArcGIS ® Geostatistical Analyst [ 21 ] انجام شد و هدف آن بررسی دقت مجموعه داده، تشخیص رفتار غیرعادی در مجموعه داده، برای آزمایش اینکه آیا فرضیه های فرض شده (به عنوان مثال، نرمال بودن) معتبر هستند و قبل از درونیابی فضایی، نقاط پرت را در مجموعه داده شناسایی کنید.
درونیابی فضایی با استفاده از چهار روش درونیابی مختلف (3 قطعی و 1 زمین آماری) انجام شد که در نوار ابزار ArcGIS ® Geostatistical Analyst موجود است. درونیابیهای فضایی ارزیابیشده در این کار عبارت بودند از: IDW، درونیابی چندجملهای محلی (LPI)، RBF و OK. در این میان، OK تنها روش زمین آماری است. این روش ها به این دلیل انتخاب شدند که به طور گسترده در ادبیات استفاده می شوند [ 10 ، 11 ، 12 ] و اغلب برای درونیابی داده های عمق سنجی در سیستم های مختلف آبی استفاده می شوند [ 4 ، 8 ، 9 ].
IDW یک روش درونیابی دقیق است که مقادیر عمق را در نقاط نمونه برداری نشده با استفاده از ترکیب خطی مقادیر در نقاط نمونه برداری شده با وزن تابع معکوس فاصله از نقطه مورد نظر تا نقاط نمونه برداری شده تخمین می زند [ 10 ]. فرض این روش این است که نقاط نمونه برداری شده نزدیکتر به نقطه نمونه برداری نشده از نظر مقادیر به آن شباهت بیشتری نسبت به نقاط دورتر دارند. LPI یک روش درونیابی غیردقیق است که مقادیر عمق را در نقاط نمونه برداری نشده با برازش یک سطح چند جمله ای مرتبه مشخص با استفاده از تمام نقاط فقط در یک همسایگی تعریف شده تخمین می زند [ 10 ]]. RBF یک روش درون یابی دقیق است که از نظر مفهومی شبیه به تطبیق یک سطح از طریق مقادیر عمق اندازه گیری شده در حالی که انحنای کل سطح را به حداقل می رساند. این روش برای محاسبه سطوح صاف از تعداد زیادی از نقاط داده نشان داده شده است. در نهایت، OK یک روش زمینآماری است که معمولاً در علوم محیطی برای توصیف الگوهای فضایی و درونیابی مقادیر متغیر اولیه در مکانهای نمونهبرداری نشده و همچنین مدلسازی عدم قطعیت یا خطای سطح برآورد شده استفاده میشود [ 10 ]. در طول درونیابی OK، تنظیم نیم متغیری به صورت تعاملی با تغییر مقادیر آستانه، محدوده، تاخیر و ناگت انجام شد. قبل از اعمال روش OK، نیمواریوگرام برای مدلسازی خودهمبستگی فضایی بین نمونههای عمقی تنظیم شد.
برای تمام روشهای درونیابی ارزیابیشده در این مطالعه، ما پارامترها و تنظیمات مختلفی را آزمایش کردیم. برای روش IDW، تعداد همسایهها، طول نیم محور و پارامتر توان را آزمایش کردیم. برای روش LPI، دستورات چند جمله ای مختلف و توابع هسته را آزمایش کردیم. برای روش RBF، تعداد همسایهها، طول نیمه محور و توابع هسته را آزمایش کردیم. برای روش OK، تنظیمات مختلف نیمواریوگرام را آزمایش کردیم. بهترین پارامترسازی هر روش درون یابی بر اساس نتایج اعتبارسنجی متقابل تعریف شد. برای نمونه های عمقی که در طول جمع آوری داده ها دو بار در طول و عرض جغرافیایی یکسان اندازه گیری شدند، ArcGIS®نوار ابزار تحلیل زمین آماری گزینه زیر را ارائه می دهد: استفاده از حداکثر مقدار، استفاده از حداقل مقدار و استفاده از مقدار متوسط. ما از مقدار میانگین در برنامه خود استفاده کردیم.
اعتبار سنجی هر روش درون یابی فضایی با استفاده از تکنیک اعتبار سنجی متقاطع انجام شد، یک تکنیک آماری محبوب که برای ارزیابی روش های درونیابی استفاده می شود [ 22 ]. در این مورد، ما از اعتبار سنجی متقاطع ترک یک خروجی (LOOCV) پیاده سازی شده در نوار ابزار ArcGIS ® Geostatistical Analyst استفاده کردیم که یک مورد خاص از اعتبار سنجی متقاطع k-fold است. در هر تکرار LOOCV، یک مقدار نمونه واحد از کل مجموعه داده حذف شد، الگوریتم درون یابی بر روی مجموعه داده باقی مانده و پس از درون یابی اعمال شد و نتیجه با مقدار نمونه حذف شده از کل مجموعه داده مقایسه شد. این روش n بار تکرار شد (که nتعداد نمونههای موجود در مجموعه داده است)، که در آن ما پارامترهای روش درونیابی را در طول روش LOOCV دوباره ارزیابی نمیکنیم. در پایان این روش، بایاس، میانگین خطای مطلق (MAE)، ریشه میانگین مربع خطا (RMSE) و ضریب تعیین (R2 ) برای هر روش درونیابی تولید شد، همانطور که توسط [ 10 ] توضیح داده شد. در نهایت، این چهار روش درونیابی فضایی بر اساس RMSE با استفاده از شبیه سازی مونت کارلو (MCS) [ 23 ] مقایسه شدند. MCS با استفاده از محیط آماری R [ 24 ] انجام شد]. در طول هر تکرار MCS، مقادیر خطای تصادفی از هر یک از مجموعه دادهها گرفته شد و مقادیر RMSE محاسبه و ذخیره شدند. با رعایت قضیه حد مرکزی، ما از 10 درصد کل داده ها برای هر مجموعه داده استفاده کردیم. MCS برای 10000 تکرار انجام شد. پس از MCS، آزمونهای آماری ANOVA و Tukey را برای بررسی اینکه آیا RMSE شبیهسازیشده از نظر آماری با یکدیگر متفاوت هستند، انجام دادیم.
2.4. استخراج اطلاعات
شبکه عمق سنجی به دست آمده با روش درون یابی فضایی با بهترین عملکرد برای به دست آوردن اطلاعات بیشتر در مورد THR، مانند نمودارهای سطح سطح و سطح حجم، استفاده شد. این اطلاعات با استفاده از نوار ابزار ArcGIS ® 3D Analyst [ 25 ] و یک صفحه گسترده Microsoft Excel® تولید شده است. ابتدا مساحت و حجم مخزن با استفاده از ابزار Surface Volume در ArcGIS محاسبه شد .نوار ابزار تحلیلگر سه بعدی. این ابزار مساحت و حجم یک شطرنجی، یک شبکه نامنظم مثلثی (TIN)، یا یک سطح مجموعه داده زمین را در بالا یا زیر یک صفحه مرجع معین محاسبه میکند. در برنامه ما از حداکثر سطح آب مخزن (74 متر بالاتر از سطح متوسط دریا) به عنوان صفحه مرجع استفاده کردیم و سطح و حجم را در هر عمق 2 متری زیر این صفحه محاسبه کردیم. سپس از صفحه گسترده Excel® برای ارتباط سطح و حجم با سطح آب و ایجاد نمودارهای سطح-مساحت و سطح-حجم استفاده کردیم. در طول تحلیل رگرسیون، بهترین خطوط با استفاده از روش حداقل مربعات تنظیم شدند.
3. نتایج و بحث
3.1. مجموعه داده های نمونه های عمقی و تجزیه و تحلیل اکتشافی
در طول بررسی میدانی، در مجموع 2017 کیلومتر با سرعت متوسط 25 کیلومتر بر ساعت در 1 ، که مربوط به حدود 90 ساعت کار است، طی شد. مساحت مخزن تحت پوشش در بررسی میدانی حدود 2600 کیلومتر مربع ( 90 درصد از کل مساحت مخزن) است. به دلیل وجود درختان مرده، برخی از مناطق کم عمق در پهنه ساحلی در طول بررسی نمونه برداری نشد. در پایان بررسی، در مجموع 179898 نمونه عمقی جمع آوری شد. جدول 1 یک خلاصه آماری از مجموعه داده های نمونه عمق را نشان می دهد در حالی که شکل 2 مسیرهای عمق سنجی ساخته شده در طول بررسی میدانی را نشان می دهد.

جدول 1. خلاصه آماری مجموعه داده نمونه عمق.

شکل 2. مسیرهای عمق سنجی انجام شده در طی بررسی میدانی. دایره های قرمز نشان دهنده مکان هایی است که به دلیل مشکل دسترسی و وجود درختان مرده زیاد نمونه برداری نشده است. کد رنگ تاریخ خرید را نشان می دهد.
3.2. مقایسه رویکردهای درونیابی فضایی
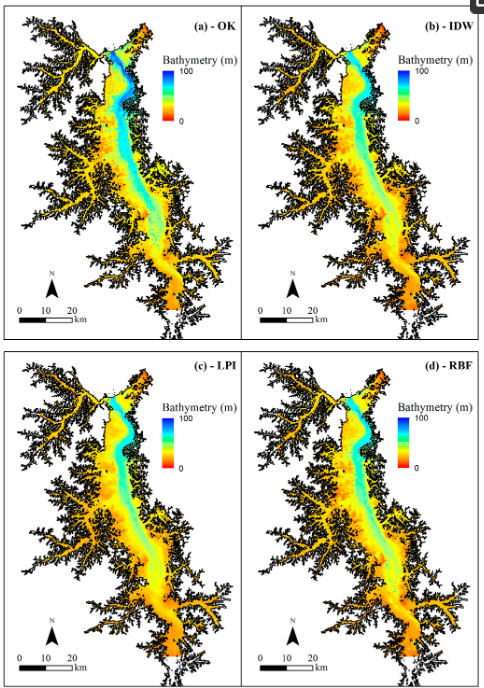
شکل 3 نتایج به کارگیری چهار روش درون یابی فضایی را در مجموعه داده نمونه های عمقی نشان می دهد، با پارامترسازی که بهترین نتایج را برای هر روش نشان می دهد ( جدول 2 ). برای هر چهار روش، شبکه درون یابی دارای وضوح فضایی 250 × 250 متر است.
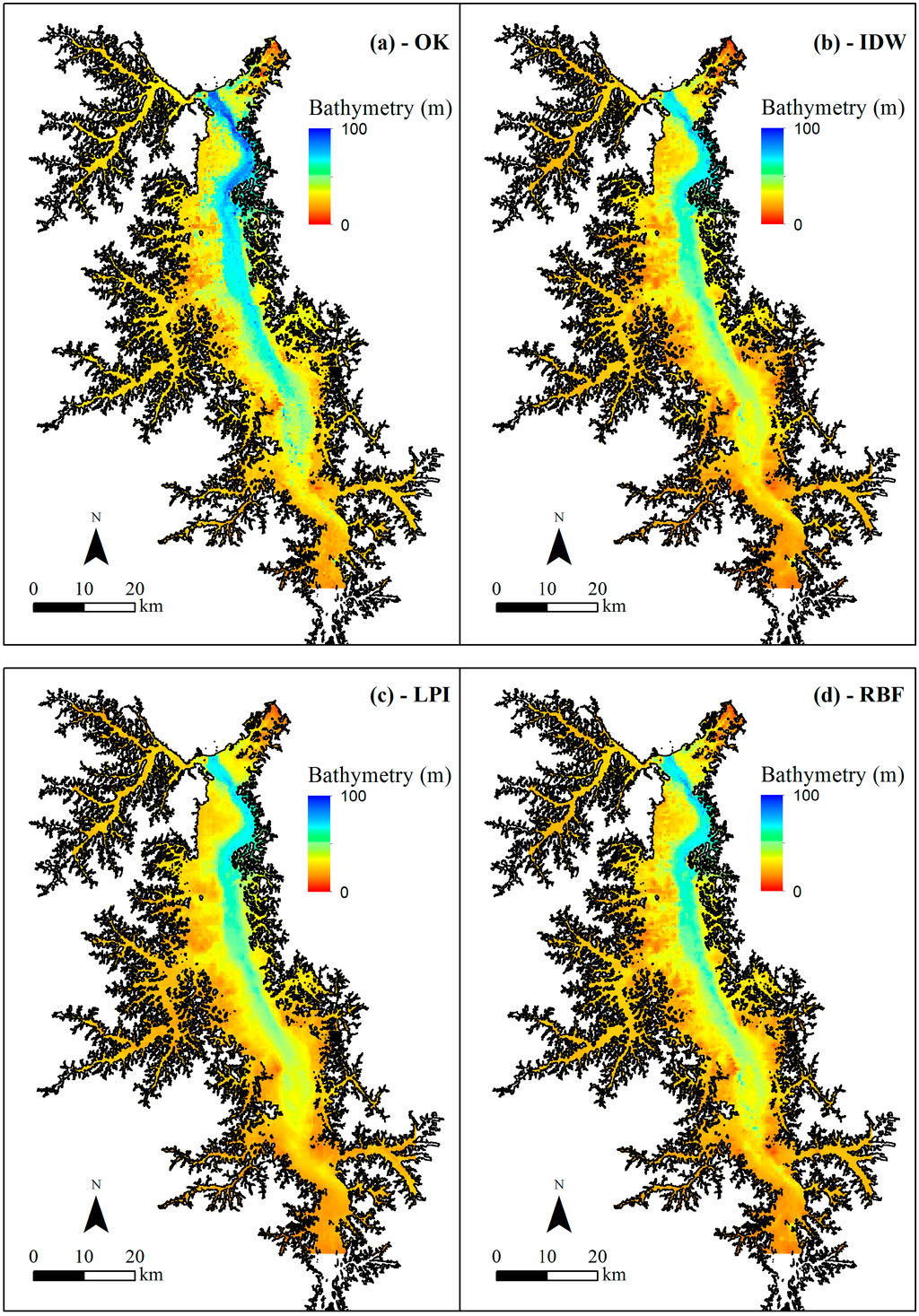
شکل 3. شبکه های عمق سنجی به دست آمده از روش های مختلف درونیابی فضایی: ( الف ) کریجینگ معمولی-OK. ( ب ) وزن دهی معکوس فاصله-IDW; ( ج ) درون یابی چند جمله ای محلی-LPI; ( د ) تابع پایه شعاعی-RBF.
جدول 2. خلاصه پارامترهای مورد استفاده در روش های درونیابی فضایی.
همه شبکههای عمقسنجی درونیابی شده دارای محدوده عمقی مشابهی بودند که از عمق تقریباً 0.5 متر تا 100 متر با مقدار متوسط حدود 28 متر میرفت. کانال رودخانه Tocantins و منطقه نزدیک سد عمق بیشتری را در مقایسه با مناطق ساحلی و انتقال نشان داد. ما همچنین مشاهده کردیم که بیشتر جزایر غوطه ور در کرانه چپ THR وجود دارند، جایی که دشت سیلابی بزرگتر از سمت راست ساحل است. از نظر کیفی، هر چهار روش مورد استفاده برای درونیابی نمونههای عمقی نتایج قابل اعتمادی به دست آوردند و توانستند ویژگیهای مهم عمق سنجی مانند کانال اصلی رودخانه توکانتینز و برخی جزایر زیر آب را ترسیم کنند. این برای مطالعات مدلسازی هیدرودینامیکی سه بعدی مهم است، هنگامی که جریانها و گردش آب توسط عمقسنجی مخزن القا میشوند [ 1 ]].
3.3. LOOCV
شکل 4 و جدول 3 نتایج روش اعتبار سنجی متقاطع را نشان می دهد.

شکل 4. نمودار پراکندگی رنگ دوبعدی بین مقادیر عمق اندازه گیری شده و تخمینی: ( الف ) کریجینگ معمولی-OK. ( ب ) وزن دهی معکوس فاصله-IDW; ( ج ) درون یابی چند جمله ای محلی-LPI; ( د ) تابع پایه شعاعی-RBF. کد رنگ محدوده خطای مطلق را نشان می دهد.
در بین چهار روش درونیابی آزمایش شده، الگوریتم OK با کمترین MAE (0.45 متر یا 0.42٪) RMSE (0.92 متر یا 0.86٪) و همبستگی بالاتر با اندازه گیری های درجا (R2) بود .= 0.997) اگر با سه روش دیگر مورد استفاده مقایسه شود. از سوی دیگر، الگوریتم LPI بدترین نتایج را داشت که منجر به RMSE بالاتر از 6 متر (~6٪) و ضریب همبستگی 0.85 شد. روشهای IDW و RBF نتایجی مشابه الگوریتم OK با RMSE کمتر از 1.5 متر (1.4٪) و ضریب همبستگی بالاتر از 0.99 نشان دادند. LPI تنها الگوریتمی بود که تمایل کلی به تخمین بیش از حد عمق را نشان داد (بایاس = 0.17 متر). هر سه روش دیگر (OK، IDW و RBF) تمایل جزئی به دست کم گرفتن اعماق در THR (بایاس کمتر از 0.005 متر) را نشان دادند.
جدول 3. خلاصه تجزیه و تحلیل LOOCV.
به جز روش LPI، هر سه روش دیگر ارزیابی شده در این مطالعه مقادیر RMSE پایینی را برای اهداف مدلسازی هیدرودینامیکی سه بعدی نشان دادند. با در نظر گرفتن مقدار RMSE روش OK به عنوان مرجع، روش های IDW، LPI و RBF مقادیر RMSE را به ترتیب حدود 55، 596 و 17 درصد بیشتر نشان دادند. عملکرد خوب OK، IDW و RBF (RMSE < 5٪) را می توان به تراکم بالای نمونه های استفاده شده نسبت داد. با توجه به Li و Heap [ 10 ] روشهای زمینآماری، مانند OK، نسبت به روشهای قطعی، مانند IDW و RBF، برای نمونههای با چگالی بالا، بهبود قابلتوجهی در پیشبینی نشان نمیدهند.
برای مقایسه با مطالعه ما، نتایج مشابهی توسط Merwade و همکاران یافت شد. [ 8 ] و Bello-Pineda و Hernández-Stefanoni [ 9 ] هنگام مقایسه روش های مختلف درون یابی برای ایجاد کانال رودخانه و شبکه های عمق سنجی سکوی غوطه ور. در دو مطالعه فوق الذکر، روشهای زمین آماری نیز در مقایسه با سایر روشهای درونیابی قطعی، عملکرد بهتری ارائه کردند. برای عمق سنجی کانال رودخانه [ 8 ] روش OK میانگین مقدار RMSE 0.27 متر را نشان داد در حالی که روش IDW میانگین مقدار RMSE 0.54 متر را نشان داد ( یعنی 100٪ بیشتر از RMSE روش OK). برای حمامسنجی سکوی غوطهور [ 9]، روش IDW RMSE را حدود 20 تا 30 درصد بیشتر از RMSE تولید شده با روش OK نشان داد.
به منظور تجزیه و تحلیل توزیع فضایی خطاها ( یعنی مقادیر پیشبینیشده-مشاهدهشده) تولید شده در طول فرآیند درونیابی، شبکههای خطا را برای هر یک از روشهای ارزیابی شده ایجاد کردیم ( شکل 5 ). شبکه های خطا با استفاده از مقادیر خطای تولید شده در طول LOOCV به دنبال همان روش درونیابی فضایی شرح داده شده در بخش 2.3 ایجاد شدند.. برای مقایسه چهار شبکه خطا، ما آنها را به چهار کلاس دوباره طبقه بندی کردیم: (1) خطا < -1 m; (2) -1 m ≤ خطا ≤ 0 m; (3) 0 متر < خطا ≤ 1 متر; و (4) خطا > 1 متر. مقادیر خطای منفی (کلاسهای 1 و 2) نشاندهنده دست کمگرفتن مقادیر عمق با روش درونیابی است در حالی که مقادیر خطای مثبت (کلاسهای 3 و 4) نشاندهنده برآورد بیش از حد عمق با روش درونیابی است.
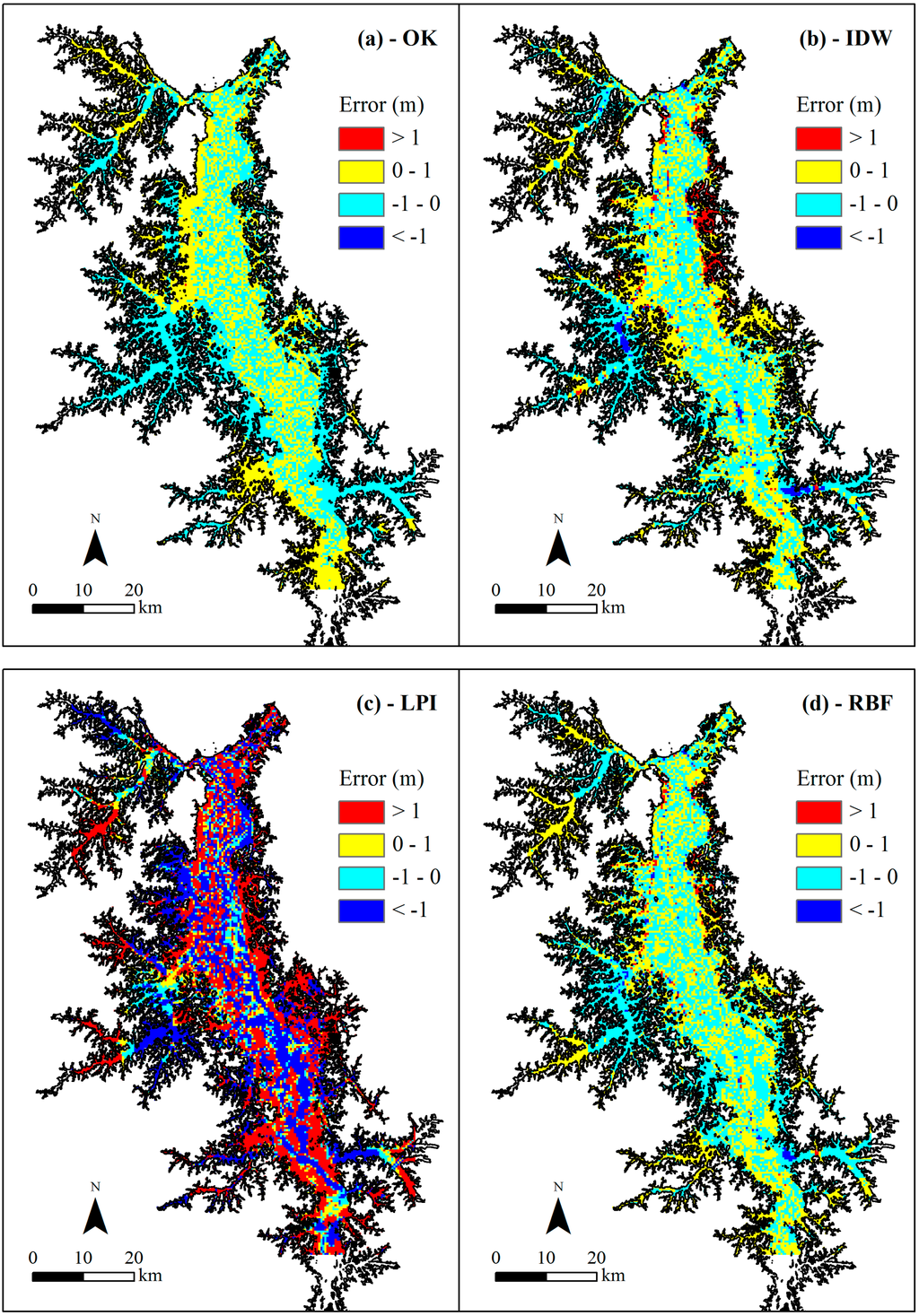
شکل 5. توزیع فضایی کلاس های خطا (m) برای روش های مختلف درونیابی: ( الف ) کریجینگ معمولی-OK. ( ب ) وزن دهی معکوس فاصله-IDW; ( ج ) درون یابی چند جمله ای محلی-LPI; ( د ) تابع پایه شعاعی-RBF.
از دیدگاه مکانی، روشهای OK و RBF ( شکل 5 a,d) تمایل به دست کم گرفتن مقادیر عمق در بیشتر سلولهای شبکه داشتند در حالی که روشهای IDW و LPI ( شکل 5 b,c) تمایل به تخمین بیش از حد عمق را نشان دادند. مقادیر در اکثر سلول های شبکه روش OK ( شکل 5 الف) مقادیر عمق (کلاس های 1 و 2) را در 56 درصد از سلول های شبکه دست کم برآورد و مقادیر عمق (کلاس های 3 و 4) را در 44 درصد سلول های شبکه بیش از حد تخمین زد. روش IDW ( شکل 5 ب) مقادیر عمق را در 48 درصد سلول های شبکه دست کم گرفته و مقادیر عمق را در 52 درصد سلول های شبکه بیش از حد تخمین زده است. روش LPI ( شکل 5ج) مقادیر عمق را در 47 درصد از سلول های شبکه دست کم گرفته و مقادیر عمق را در 53 درصد از سلول های شبکه بیش از حد تخمین زده است. روش RBF ( شکل 5 د) مقادیر عمق را در 51 درصد از سلول های شبکه دست کم گرفت و مقادیر عمق را در 49 درصد از سلول های شبکه بیش از حد تخمین زد. LPI تنها روشی بود که بیشتر سلولهای شبکه را در کلاسهای 1 و 4 (خطای مطلق > 1 متر)، حدود 79 درصد سلولها طبقهبندی کرد. از سوی دیگر، روشهای OK، IDW و RBF بیش از 95 درصد از سلولهای شبکه را در کلاسهای 2 و 3 طبقهبندی کردند (خطای مطلق <1 متر).
برای روش های درون یابی OK، IDW و RBF، هیچ الگوی واضحی در توزیع فضایی خطا مشاهده نشد، اگرچه این خطا بیشتر (در مقادیر مطلق) و ناهمگن تر در ناحیه ساحلی و در برخی از فروافتادگی مخزن بود. بدنه اصلی مخزن این واقعیت را می توان در نتیجه چگالی نمونه در عمق کم جمع آوری شده در مناطق کم عمق مخزن توضیح داد. برعکس، در مناطق با تراکم نمونه با عمق بالا (به عنوان مثال، بدنه اصلی مخزن)، روش های OK، IDW و RBF نتایج مشابه و مقادیر خطای پایین (در مقادیر مطلق) را نشان دادند. روش LPI یک الگوی متمایز را در توزیع فضایی خطا در مقایسه با سه روش دیگر تجزیه و تحلیل نشان داد. در این مورد، خطاهای تولید شده توسط روش LPI ناهمگن و زیاد (در مقادیر مطلق) در تمام مناطق مخزن مجزا بود. علاوه بر این، روش LPI تنها روشی بود که تمایل به دست کم گرفتن مقادیر عمق در امتداد کانال رودخانه داشت.
3.4. شبیه سازی مونت کارلو
به منظور تجزیه و تحلیل اینکه آیا RMSE به دست آمده برای هر روش درونیابی از نظر آماری متفاوت است، ما یک MCS انجام دادیم. شکل 6هیستوگرام مقادیر RMSE شبیه سازی شده برای هر روش درون یابی را نشان می دهد. RMSE شبیهسازیشده برای روش OK از 0.87 تا 0.97 متر با مقدار میانگین 0.92 متر متغیر بود در حالی که روش IDW از 1.34 تا 1.54 متر با مقدار میانگین 1.44 متر متغیر بود. RMSE شبیه سازی شده برای روش LPI از 6.31 تا 6.51 متر با مقدار میانگین 6.41 متر متغیر بود در حالی که روش RBF از RMSE از 1.02 تا 1.14 متر با مقدار میانگین 1.08 متر متغیر بود. همانطور که می توان اشاره کرد، میانگین RMSE شبیه سازی شده برای روش LPI بیش از 500 درصد بیشتر از RMSE شبیه سازی شده برای سه روش دیگر بود. RMSE شبیهسازیشده برای روشهای OK و RBF مشابه با اختلاف کمتر از 18 درصد بود.

شکل 6. هیستوگرام هایی که نتایج شبیه سازی مونت کارلو را نشان می دهد.
برای آزمایش اینکه آیا میانگین RMSE شبیهسازی شده تفاوت معنیداری دارد یا خیر، یک آزمون ANOVA انجام دادیم ( p -value <0.001). نتایج این آزمون نشان داد که حداقل یک میانگین RMSE شبیه سازی شده از نظر آماری با بقیه تفاوت دارد ( p -value <0.01). یک آزمون Tukey اضافی نشان داد که در بین چهار روش درون یابی فضایی مورد استفاده در این کار، الگوریتم OK در مقایسه با سه روش دیگر RMSE آماری کمتری ( p -value <0.001) نشان داد.
بهترین نتیجه به دست آمده توسط الگوریتم OK، در مقایسه با سه روش دیگر آزمایش شده، را می توان به ماهیت زمین آماری این الگوریتم نسبت داد، که خود همبستگی فضایی بین نمونه ها را در طول روش درونیابی [ 10 ] در نظر می گیرد. همچنین، روش OK برای داده هایی که به طور نامنظم نمونه برداری شده اند، مانند مجموعه داده های مورد استفاده در این مطالعه، توصیه می شود.
3.5. نمونه هایی از اطلاعات استخراج شده از شبکه Bathymetric
با استفاده از سطح عمق سنجی تولید شده توسط الگوریتم درون یابی با بهترین عملکرد و GIS، امکان استخراج اطلاعات بیشتر در مورد ویژگی های مخزن فراهم شد. این اطلاعات می تواند برای پایش عملیاتی مخزن و همچنین برای مطالعات مدلسازی هیدرودینامیکی و کیفیت آب مورد استفاده قرار گیرد. شکل 7 نمودار سطح سطح ( شکل 7 الف) و سطح حجم ( شکل 7 ب) را نشان می دهد در حالی که شکل 8 نمای عمق سنجی سه بعدی مخزن را نشان می دهد.
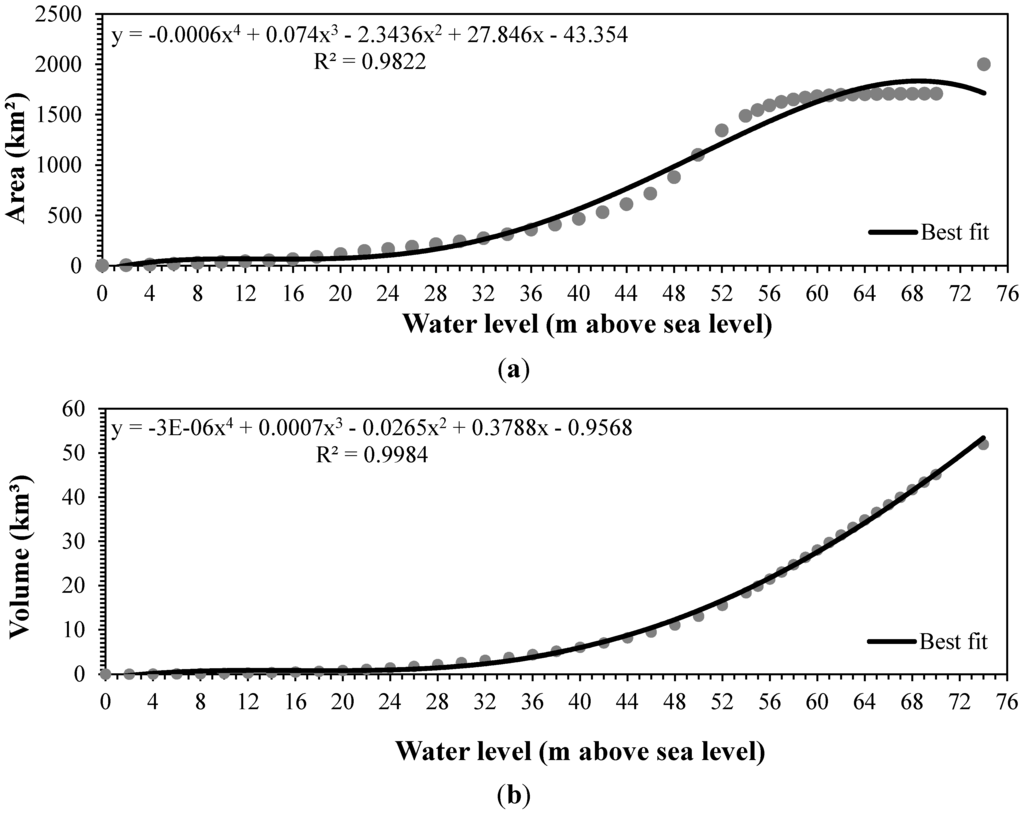
شکل 7. اطلاعات استخراج شده از شبکه عمق سنجی به دست آمده از روش OK: ( الف ) نمودار سطح-مساحت. ( ب ) نمودار سطح-حجم.
برای THR بهترین تناسب برای دو نمودار با استفاده از یک تابع چند جمله ای مرتبه چهارم (R2 > 0.96) به دست آمد. با استفاده از این نمودارها می توان نظارت عملیاتی THR را با تخمین مساحت و حجم مخزن به عنوان تابعی از سطح آب، که متغیری است که اندازه گیری آن آسان است، بهینه کرد. از این نمودارها می توان برای نظارت بر ظرفیت تولید مخزن نیز استفاده کرد. ما مساحت سطح و حجم کل THR را به ترتیب حدود 2100 کیلومتر مربع و 52 کیلومتر مکعب (سطح آب در 74 متر بالاتر از سطح دریا) تخمین زدیم.
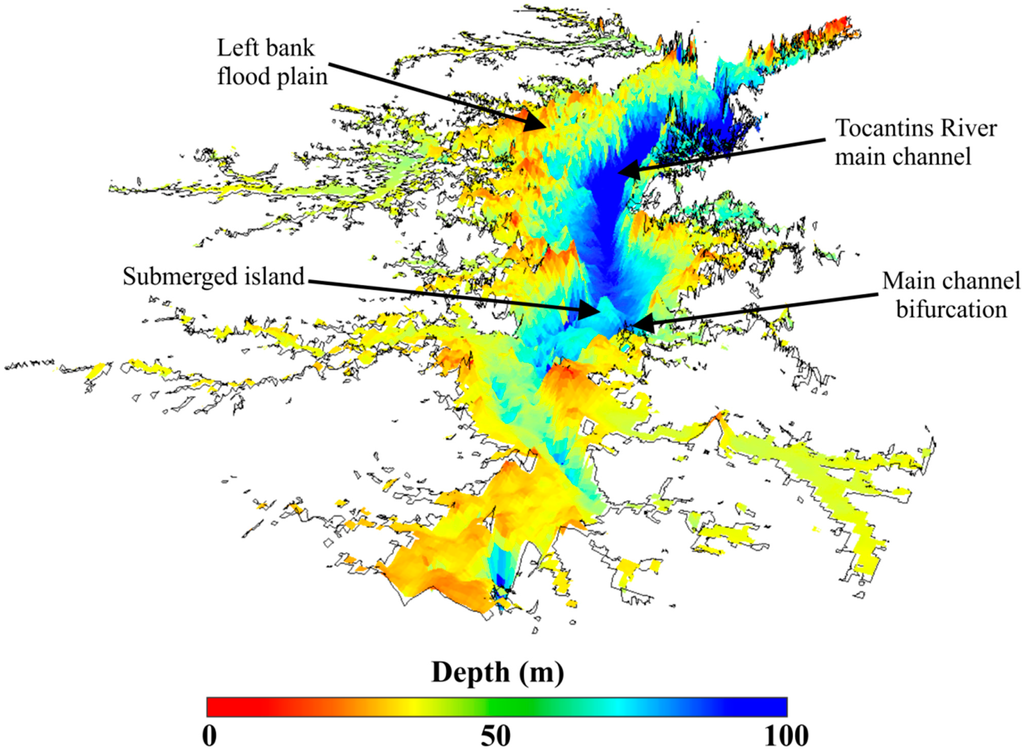
شکل 8. نمای سه بعدی آب سنجی مخزن.
4. نتیجه گیری
در این مطالعه ما چهار روش درونیابی فضایی را برای نقشه برداری عمق سنجی یک مخزن آمازون ارزیابی کردیم. نتایج اصلی عبارتند از:
-
از نظر کیفی، هر چهار روش درونیابی مورد استفاده در این کار قادر به ترسیم ویژگیهای مهم عمق سنجی در THR، مانند کانال رودخانه Tucuruí و جزیره غوطهور بودند. از نظر بصری، تمام روش های آزمایش شده نتایج مشابهی را به همراه داشت.
-
از نظر کمی، و برای این مورد مخزن آمازونی، روش زمین آماری بهترین نتایج را ارائه کرد، با الگوریتم OK که RMSE کمتر (0.92 متر یا 0.86٪ محدوده) و ضریب همبستگی بالاتر (0.997) را در مقایسه با الگوریتم IDW، LPI و RBF نشان داد. این ممکن است به دلیل این واقعیت باشد که نمونههای عمقی با فاصله نامنظم قرار گرفتند، جایی که روش OK مناسبتر است. بنابراین، انتخاب روش مورد استفاده می تواند با طراحی نمونه هدایت شود.
-
الگوریتم LPI اغلب در این زمینه مورد استفاده قرار نگرفته است و تمایل کلی به تخمین بیش از حد اعماق THR را نشان می دهد. سه روش دیگر تمایل جزئی به دست کم گرفتن مقادیر عمق را نشان دادند.
-
از نقطه نظر مکانی، روشهای OK، IDW و RBF هیچ الگوی واضحی در توزیع خطا نشان ندادند، اگرچه مقادیر خطای بالایی (به صورت مطلق) در مناطق مخزن با تراکم نمونه عمق کم (به عنوان مثال، مناطق ساحلی و انتقالی) رخ داد. ). در مناطق مخزن با تراکم نمونه با عمق بالا، روشهای OK، IDW و RBF عملکرد مشابهی با مقادیر خطای کم (به صورت مطلق) نشان دادند.
-
شبکه عمق سنجی به دست آمده با روش OK مناسب ترین برای استخراج اطلاعات اضافی در مورد THR بود. این اطلاعات برای مطالعات مدلسازی سه بعدی هیدرودینامیکی و کیفیت آب و برای نظارت عملیاتی مخزن آمازون بسیار مهم است.
-
مطالعات آتی مورد نیاز است تا مشخص شود آیا این الگوها در دیگر مخازن آمازون مشابه هستند یا خیر، به عنوان مثال ، آیا یک رویکرد زمین آماری بهترین راه حل را برای این حوزه مشکل ارائه می دهد یا خیر.
-
مطالعات آتی باید روشهایی را که ماهیت ناهمسانگرد بستر رودخانه و نقش برجسته غوطهور را در نظر میگیرند، به عنوان مثال ، جهت ترجیحی تغییرپذیری دادههای عمق سنجی، در طول روش درونیابی مقایسه کنند.
مراجع و یادداشت ها
- ایمبرگر، جی. هامبلین، دینامیک PF دریاچه ها، مخازن، و حوضچه های خنک کننده. ان Rev. Fluid Mech. 1982 ، 14 ، 153-187. [ Google Scholar ] [ CrossRef ]
- کورتارلی، نماینده مجلس؛ Alcantara، EH; رنو، سی دی; Assireu، AT; Bonnet, M.-P.; Stech، JL مدلسازی گردش سطحی و ساختار حرارتی یک مخزن استوایی با استفاده از مدل دریاچه هیدرودینامیکی سهبعدی و دادههای سنجش از دور. محیط زیست آب J. 2013 , 28 , 516-525. [ Google Scholar ] [ CrossRef ]
- بی، اچ. Si, H. شبیهسازی عددی نشت نفت برای مخزن Three Gorges در چین. محیط زیست آب J. 2012 , 28 , 183-191. [ Google Scholar ] [ CrossRef ]
- Merwade, V. تأثیر روندهای فضایی بر درونیابی عمق سنجی رودخانه. جی هیدرول. 2009 ، 371 ، 169-181. [ Google Scholar ] [ CrossRef ]
- آلکانتارا، ای. نوو، ای. استچ، جی. آسیرو، ا. ناسیمنتو، آر. لورنتستی، جی. Souza، A. یکپارچه سازی نقشه های توپوگرافی تاریخی و داده های SRTM برای استخراج عمق سنجی یک مخزن استوایی. جی هیدرول. 2010 ، 389 ، 311-316. [ Google Scholar ] [ CrossRef ]
- غلامعلی فرد، م. کوتسر، تی. اسماعیلی ساری، ع. آبکار، ع.ا. نعیمی، ب. مدلسازی تجربی آبسنجی با سنجش از دور در جنوب شرقی دریای خزر. Remote Sens. 2013 , 5 , 2746–2762. [ Google Scholar ] [ CrossRef ]
- ابیله، ر. Vignudelli، S. یک رویکرد کاملاً سنجش از دور برای نظارت بر حجم آب مخازن. بین المللی فناوری آب J. 2011 ، 1 ، 63-77. [ Google Scholar ]
- مرواد، VM; Maidment، DR; گاف، JA ملاحظات ناهمسانگرد در حین درونیابی عمق سنجی کانال رودخانه. جی هیدرول. 2006 ، 331 ، 731-741. [ Google Scholar ] [ CrossRef ]
- بلو-پیندا، جی. Stefanoni-Hernández، JL مقایسه عملکرد دو روش درونیابی فضایی برای ایجاد یک مدل عمق سنجی دیجیتال از سکوی غوطه ور یوکاتان. Pan-Am. جی. آکوات. علمی 2007 ، 2 ، 247-254. [ Google Scholar ]
- لی، جی. Heap، AD مروری بر روشهای درونیابی فضایی برای دانشمندان محیطزیست . Geoscience Australia: کانبرا، استرالیا، 2008. [ Google Scholar ]
- آزپوروا، م. دوس راموس، ک. مقایسه روشهای درونیابی فضایی برای تخمین میانگین بزرگی میدان الکترومغناطیسی. Prog. الکترومغناطیس. Res. M 2010 ، 14 ، 135-145. [ Google Scholar ] [ CrossRef ]
- منگ، کیو. لیو، ز. مرزها، BE ارزیابی کریجینگ رگرسیون برای درونیابی فضایی – مقایسه هفت روش درونیابی GIS. کارتوگر. Geogr. Inf. علمی 2013 ، 40 ، 28-39. [ Google Scholar ] [ CrossRef ]
- Maciel، ER O Lago ; Ética: Imperatriz، برزیل، 2012. (به پرتغالی) [ Google Scholar ]
- Fearnside، PM اثرات اجتماعی سد توکوروی برزیل. محیط زیست مدیریت 1999 ، 24 ، 485-495. [ Google Scholar ] [ CrossRef ]
- ویلسون، جی ال. ریچاردز، JM مستندات رویه ای و ارزیابی دقت نقشه های عمق سنجی و جداول مساحت/ظرفیت برای مخازن کوچک . سازمان زمین شناسی ایالات متحده: Reston، VA، ایالات متحده آمریکا، 2006. [ Google Scholar ]
- لوک، اف. Skinner, A. Manual of Instructions: Bathymetric Surveys ; وزارت منابع طبیعی: Cochrane, ON, Canada, 2004. [ Google Scholar ]
- آیرونز، جی آر. دوایر، جی ال. برسی، JA ماهواره بعدی لندست: ماموریت تداوم داده لندست. سنسور از راه دور محیط. 2012 ، 122 ، 11-21. [ Google Scholar ] [ CrossRef ]
- گوگل ارث. در دسترس آنلاین: http://www.google.com/earth/ (دسترسی در 15 ژانویه 2014).
- بولتن عملیاتی Eletronorte—Tucuruí. در دسترس آنلاین: http://www.eln.gov.br/opencms/opencms/pilares/geracao/estados/tucurui/ (در 20 ژانویه 2014 قابل دسترسی است).
- Fotheringham، AS; چارلتون، M. GIS و تجزیه و تحلیل داده های فضایی اکتشافی: مروری بر برخی مسائل تحقیقاتی. Geogr. سیستم 1994 ، 1 ، 315-327. [ Google Scholar ]
- تحلیلگر زمین آماری ArcGIS. در دسترس آنلاین: http://www.esri.com/software/arcgis/extensions/geostatistical (در 10 ژانویه 2014 قابل دسترسی است).
- Cressie، NAC Statistics for Spatial Data ; جان ویلی و پسران: نیویورک، نیویورک، ایالات متحده آمریکا، 1993. [ Google Scholar ]
- لیو، ایکس. لیو، ی. لیو، اچ. نظریه و کاربرد روش مونت کارلو . Springer: Heidelberg، آلمان، 2012. [ Google Scholar ]
- R: زبان و محیطی برای محاسبات آماری. در دسترس آنلاین: http://www.r-project.org/ (دسترسی در 5 ژانویه 2014).
- تحلیلگر ArcGIS 3D. در دسترس آنلاین: http://www.esri.com/software/arcgis/extensions/3danalyst (در 10 ژانویه 2014 قابل دسترسی است).
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است
بدون نظر