

خلاصه
سیستمهای اسکن لیزری سیار (MLS) به طور گسترده برای جمعآوری دادههای مکانی و پشتیبانی از برنامههای کاربردی در بسیاری از جنبهها استفاده میشوند. در سالهای اخیر، فناوری MLS به کاربردهای راهآهن معرفی شده است و جزئیات و کارایی فضایی را در مقایسه با رویکردهای سنتی بسیار افزایش داده است. با این حال، پیشرفت فناوری MLS به طور کامل در محیط راه آهن اعمال نمی شود. سیستمهای MLS معمولی به ناوبری یکپارچه از طریق استفاده از سیستمهای ناوبری اینرسی (INS) و سیستمهای ماهوارهای ناوبری جهانی (GNSS) برای ارجاع جغرافیایی متکی هستند، در حالی که در شرایط قطعی طولانیمدت GNSS یا حتی محیطهای بدون GNSS، مانند راهآهن زیرزمینی یا تونل های طولانی، به دلیل عملکرد ضعیف ناوبری اینرسی مستقل، یک مسئله چالش برانگیز باقی مانده است. سیستمهای MLS تجاری معمولاً از واحدهای اندازهگیری اینرسی با کارایی بالا (IMU) و استراتژیهای مختلف برای مدیریت قطعی GNSS استفاده میکنند، اما اجزای GNSS هنوز قبل و بعد از تجربه از دست دادن سیگنالهای GNSS ضروری هستند. برای مقابله با مشکل قطعی دائمی GNSS، روشهای جایگزین برای جایگزینی GNSS معرفی شدهاند و بنابراین امکان استفاده از سیستمهای MLS در محیطهای راهآهن زیرزمینی بدون GNSS را فراهم میکنند. چنین رویکردهایی سیستمهای MLS را تشویق میکنند تا در سیستمهای اسکن لیزری راهآهن زیرزمینی (URLS) توسعه یابند، که ممکن است چندین عملکرد عملیاتی جایگزین را برای مدیریت عملیات راهآهن زیرزمینی فراهم کند. برای مقابله با مشکل قطعی دائمی GNSS، روشهای جایگزین برای جایگزینی GNSS معرفی شدهاند و بنابراین امکان استفاده از سیستمهای MLS در محیطهای راهآهن زیرزمینی بدون GNSS را فراهم میکنند. چنین رویکردهایی سیستمهای MLS را تشویق میکنند تا به سیستمهای اسکن لیزری راهآهن زیرزمینی (URLS) توسعه یابند، که ممکن است چندین عملکرد عملیاتی جایگزین برای مدیریت عملیات راهآهن زیرزمینی فراهم کند. برای مقابله با مشکل قطعی دائمی GNSS، روشهای جایگزین برای جایگزینی GNSS معرفی شدهاند و بنابراین امکان استفاده از سیستمهای MLS در محیطهای راهآهن زیرزمینی بدون GNSS را فراهم میکنند. چنین رویکردهایی سیستمهای MLS را تشویق میکنند تا در سیستمهای اسکن لیزری راهآهن زیرزمینی (URLS) توسعه یابند، که ممکن است چندین عملکرد عملیاتی جایگزین را برای مدیریت عملیات راهآهن زیرزمینی فراهم کند.
کلید واژه ها:
اسکن لیزری موبایل ; راه آهن زیرزمینی ; قطعی GNSS
1. معرفی
سیستمهای اسکن لیزری سیار (MLS) به عنوان راهحلهای دقیق برای جمعآوری دادههای مکانی پویا توسعه داده شدهاند. به طور کلی، سیستمهای MLS از پروفیلهای لیزری، دوربینهای قاب دیجیتال و سایر دستگاهها برای اندازهگیری استفاده میکنند. اندازهگیریها توسط خط سیر زمانبندی شده که توسط یک سیستم موقعیت و جهتیابی (POS) حفظ میشود، ارجاع داده میشوند. امروزه، سیستمهای تجاری MLS را میتوان به طور گسترده برای بررسیهای توپوگرافی مهندسی، بررسیهای ساخته شده، بررسیهای ساختاری و ترخیص، بررسی تغییر شکل، بررسیهای محیطی یا مدلسازی شهری مورد استفاده قرار داد. مبانی فناوری MLS به تفصیل بررسی شده است [ 1 ، 2 ، 3]. سیستمهای MLS همچنین به طور گسترده در راهآهنها برای بررسی مسیر ریلی، اندازهگیریهای ترخیص، بازسازی زیرساخت و نقشهبرداری تونل استفاده میشوند [ 4 ، 5 ، 6 ، 7 ]. با این حال، چنین برنامه هایی عمدتاً به یک POS برای ناوبری متکی هستند و بنابراین عملکرد مرجع جغرافیایی با قطع سیستم جهانی ناوبری ماهواره ای (GNSS) کاهش می یابد. از آنجایی که سیستم ها به شرایط GNSS بستگی دارند، بررسی های کنترلی اضافی و تنظیمات پس از فرآیند معمولاً برای دستیابی به دقت مورد نیاز ضروری هستند. قابلیت استفاده و عملی بودن برنامه ها محدود است. برخی از پیکربندیهای سیستم ساده شده و به زیرسیستمها تجزیه شدهاند و قادر به کاربردهای آنلاین غیر دقیق در راهآهن بدون ناوبری اینرسی هستند [ 8 ]، 9]، اما توابع توسط طراحی سیستم محدود شده است. برای افزایش عملکرد سیستم در راهآهنهای زیرزمینی، اطلاعات و زیرساختهای موجود در سیستمهای راهآهن جایگزینهایی برای جایگزینی اجزای GNSS هستند. به عنوان مثال، خطوط برق هوایی و دروازهها، پیکربندی مسیر و دادههای تراز، اطلاعات تعیین مسیر، سیستمهای کنترل و سیگنالینگ، سازههای تونل و سکوها را میتوان استفاده کرد. علاوه بر این، توسعه عملیات مستمر دامنه کاربردهای سیستم را گسترش خواهد داد. این مطالعه ابتدا راه حل های فعلی را برای مدیریت قطعی GNSS بررسی می کند و سپس راه حل های جایگزین را برای استفاده در یک سیستم اسکن لیزری راه آهن زیرزمینی (URLS) یکپارچه برای استفاده در محیط های بدون GNSS ارائه می کند. ثانیاً
2. راه حل برای پل زدن قطعی GNSS
در سالهای اخیر، برخی از سیستمهای تجاری MLS مانند Optech’s Lynx Mobile Mapper، IGI’s RailMapper و Riegl’s VMX-450-Rail با استفاده از معماریهای پیشرفته POS و تکنیکهای پردازش داده پیچیده برای به حداقل رساندن موارد منفی، برای کاربردهای راهآهن اقتباس شدهاند. تاثیر قطعی GNSS بر دقت داده ها این رویکردها در بخش زیر تشریح شده است. در حالی که چنین سیستمهایی برای راهآهنهای بالای زمینی که قطعی GNSS ممکن است برای دورههای زمانی معینی طول بکشد مناسب هستند، یک محیط کاملاً عاری از GNSS در سیستمهای راهآهن زیرزمینی وجود دارد. در نتیجه، راه حل های جایگزین برای جایگزینی مؤلفه GNSS مورد نیاز است و در بخش 2.2 توضیح داده شده است.
2.1. استراتژی های فعلی برای قطع GNSS
اکثر سیستمهای MLS زمینی از یک POS برای تخمین مسیر ناوبری استفاده میکنند. برخی از استراتژیهای موجود مانند معماریهای مختلف POS، الگوریتمهای هموارسازی، بهروزرسانیهای سرعت، بهروزرسانیهای شاخص، پلسازی فتوگرامتری و سادهسازی سیستم در حال حاضر برای حفظ عملکرد سیستم در هنگام قطع GNSS اتخاذ شدهاند که در اینجا خلاصه میشود.
2.1.1. معماری POS
روشهای مختلفی وجود دارد که سیستم ناوبری اینرسی (INS) و GNSS ممکن است در هنگام تشکیل یک POS جفت شوند، که سه مورد از آنها عبارتند از: جفت آزاد، جفت محکم و جفت عمیق. ادغام کاملاً همراه توسط اکثریت برای سیستمهای ناوبری تجاری استفاده میشود، به دلیل مزیت آن در استفاده از اندازهگیریهای کمتر از تعداد کافی ماهواره برای موقعیتیابی GNSS [ 1 ، 10 ]. با این وجود، پیکربندی کوپلینگ هیچ تاثیری بر عملکرد سیستم تحت قطع کامل GNSS ندارد. برای یک محیط کاملاً عاری از GNSS، معماری باید دوباره طراحی شود تا با جفت کردن INS با سایر منابع اطلاعات موقعیت یابی، جایگزین GNSS شود.
2.1.2. الگوریتم هموارسازی بهینه
یک الگوریتم هموارسازی بهینه، مانند هموارسازی رو به عقب، یا هموارسازی Rauch-Tung-Striebel [ 11 ]، یک تکنیک پس پردازشی است که توسط اکثر سیستمهای تجاری MLS برای پل زدن قطعهای GNSS و تنظیم مجدد INS با ترکیب و هموارسازی رو به جلو و هموارسازی استفاده میشود. انتشار به عقب [ 12 ، 13 ، 14 ]. با مقداردهی اولیه و نهایی سازی مناسب سیستم با موقعیت یابی GNSS، می توان با ترکیب روش های دیگر، به دقت سطح سانتی متر تا زیر دسی متر برای دوره های طولانی قطع GNSS دست یافت [ 15 ]. با این حال، خطاهای کشف نشده همچنان در طول قطع GNSS جمع می شوند و نمی توانند مشکل INS مستقل را به طور مستقل حل کنند، به خصوص برای یک سیستم MLS با IMU کم هزینه.
2.1.3. به روز رسانی سرعت
علاوه بر معماری POS، یک نشانگر اندازهگیری فاصله (DMI) روی چرخ معمولاً برای اندازهگیریهای سرعت مستقل [ 2 ] استفاده میشود که از بهروزرسانی دقیق سرعت یا بهروزرسانی سرعت صفر (ZUPT) از طریق پردازنده INS/GNSS پشتیبانی میکند. این می تواند در هر شرایط GNSS اعمال شود، اما برای کنترل رانش یکپارچه سازی INS در هنگام قطع GNSS مهم است. برای کاربردهای خاص MLS، ابزار یا تکنیک های جایگزین برای به روز رسانی سرعت استفاده می شود. در حالی که نوسانات موقعیت و سرعت را کنترل می کند، خطاهای موقعیت مطلق و خطاهای نگرش را نمی توان بازنشانی کرد. در محیط های راه آهن، به روز رسانی سرعت یکی از رویکردهای اساسی برای قرار دادن وسیله نقلیه در طول مسیر است.
2.1.4. بهروزرسانیهای شاخص
برای کنترل خطاهای موقعیت، بهروزرسانیهای لندمارک (LMU) معمولاً برای پشتیبانی از ناوبری MLS با تصحیح موقعیت خودرو با اندازهگیریها به نشانهها یا ویژگیهای کنترلی اعمال میشوند [ 14 ، 16 ، 17 ]. این رویکرد معمولاً با اندازهگیریهای فتوگرامتری یا اسکن لیزری اجرا میشود و بهعنوان بهروزرسانی مختصات متناوب (CUPT) برای حفظ دقت در هنگام قطع GNSS عمل میکند. راه حل معمولاً پس از پردازش است و دقت آن به بررسی های کنترلی، اندازه گیری های سیستم MLS و فواصل در دسترس ویژگی های کنترل بستگی دارد. نتایج نشان داده است که دقت کلی با استفاده از سیستمهای تجاری MLS به طور قابلتوجهی به دقت سطح سانتیمتری با فاصله کنترل 25 متر بهبود مییابد [ 15 , 16 ].].
2.1.5. پل فتوگرامتری
پل فتوگرامتری یک راه حل بدون نیاز به بررسی های کنترلی اضافی برای نشانه ها است که برای پل زدن قطعی GNSS از طریق جهت گیری نسبی جفت های تصویر [ 18 ، 19 ، 20 ] اعمال می شود. در شرایط عادی، INS/GNSS برای به روز رسانی مسیریابی و تعیین پارامترهای جهت گیری خارجی دوربین (EOP) از طریق فیلتر کالمن استفاده می شود. در طول قطع GNSS، تنظیم فتوگرامتری قادر است EOP ها را از طریق جهت گیری نسبی تصاویر استریو همپوشانی برای تخمین خطای INS به روز کند. یک رویکرد مشابه با استفاده از تصاویر ویدئویی نیز یک راه حل معمول برای برخی از سیستم های MLS است [ 21 ، 22]. به طور کلی، پل فتوگرامتری نمی تواند دقت طولانی مدت را حفظ کند، در حالی که عملکرد آن توسط شرایط محیطی، مانند روشنایی و سرعت عملیات محدود می شود. با این وجود، این معیارها به طور قابل توجهی در داخل تونل های راه آهن کمبود دارند.
2.1.6. اسکن ساده پروفایل موبایل
برای برخی کاربردها، سیستمهای MLS به زیرسیستمها تجزیه میشوند و برای اسکن پروفایل تونل در راهآهن استفاده میشوند [ 8 ، 9 ]. پیکربندی ساده شده به INS برای ارجاع جغرافیایی متکی نیست، بلکه تنها به سیستم محلی با توجه به مسیر راه آهن اشاره دارد. چنین سیستم ساده شده با محلی سازی راه آهن ترکیب شده و قادر به عملیات بلادرنگ است که برای نظارت بر وضعیت زیرساخت های راه آهن استفاده می شود.
اگرچه اسکن پروفایل به شرایط GNSS بستگی ندارد و می تواند به عنوان یک راه حل بلادرنگ کار کند، اما راه حل دقیقی نیست و به اهداف خاصی محدود می شود. جهت واحد اسکن در جهت عمودی محدود شده است تا خطاهای ناشی از عدم قطعیت مرجع را به حداقل برساند، اما تغییرات نگرش و حرکت بدن قطار نادیده گرفته می شود.
2.2. رویکردهای جایگزین برای سیستم های URL
اکثر استراتژی های فعلی با حضور قطعی متناوب GNSS اجرا می شوند. عملکرد آنها به مدت زمان قطع GNSS و کیفیت IMU و دستگاه های اندازه گیری کمکی بستگی دارد. هیچ یک از آنها قادر به جبران از دست دادن کل داده های GNSS نیستند. در عوض، روشهای جایگزین برای جایگزینی GNSS برای توسعه URLها معرفی شدهاند. برای دستیابی به عملکرد ثابت و قابل اعتماد، مولفه GNSS باید با مسیر ریلی و سایر جایگزین ها جایگزین شود. این بخش روش های مختلف ممکن برای توسعه سیستم های URL بدون GNSS را تشریح می کند.
2.2.1. طرح ریزی تونل محلی
برای ارجاع محلی، هندسه تونل به عنوان یک محدودیت اسمی برای تنظیم مسیر ناوبری و داده های نقشه برداری عمل می کند [ 23 ]. از آنجایی که INS معمولاً دقت کوتاهمدتی را حفظ میکند (بسته به کیفیت IMU)، دقت نسبی در یک بخش از دادههای ابر نقطهای برای توصیف شی نگاشتشده کافی است. تقسیم بندی ابر نقطه ای تنظیم مسیر مستقل را با توجه به هندسه تونل فراهم می کند و کل تونل به بخش هایی برای ذخیره سازی و تجزیه و تحلیل تقسیم می شود.
طرح تونل تنظیم و نمایش نتایج اندازه گیری را ساده می کند. برای بررسی تونلها طراحی شده است و در راهآهنهای بدون GNSS کار میکند، اما راهحلهای مرجع جغرافیایی ارائه نمیدهد و دقت مطلق اندازهگیری حفظ نمیشود.
2.2.2. ناوبری ریل
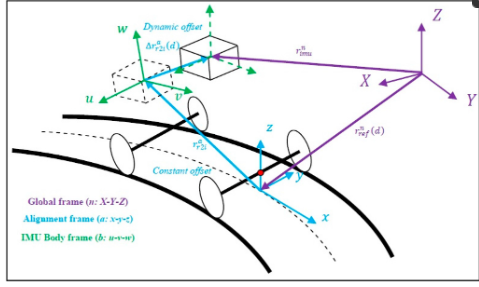
مکان یابی قطار در یک سیستم راه آهن به تراز ریل بستگی دارد که به عنوان یک ویژگی کنترل مداوم برای CUPT عمل می کند و جایگزین مولفه GNSS می شود. از آنجایی که حرکت قطار از پیش تعریف شده و توسط مسیر راه آهن محدود شده است، ردیابی موقعیت قطار با توجه به داده های تراز ریلی به فاصله یک بعدی کاهش می یابد. موقعیت و جهت یک قطار تقریباً از طریق یک محور مرجع تعریف می شود اگر زنجیره محور به طور دقیق مشخص شود، همانطور که در شکل 1 نشان داده شده است.

شکل 1. پیکربندی ناوبری محدود به راه آهن.
متأسفانه، یک واگن قطار یک بدنه سفت و سخت نیست و حرکت محور مرجع با بدنه بالای کابین که اجزای سیستم MLS معمولاً به آن متصل میشوند، متفاوت است، به این معنی که استفاده مستقیم از تراز مسیر باعث ایجاد خطاهای موقعیت اضافی میشود. حرکات نسبی بین محور و بدنه قطار به طور بالقوه ناشی از مسائل مختلفی مانند شتاب قطار، نیروی گریز از مرکز، حرکت مسافران، ارتعاش در اتصالات مسیر، و نقص ریل و غیره است. مشکل حرکت نسبی بین محور مرجع و پایه سیستم MLS با معادله (1) توضیح داده شده است. افست نامی سه بعدی بین مرکز بدنه MLS و محور مرجع rآr 2 i��2منآدر قاب تراز مدرج و ثابت است. اصلاح دینامیک Δrآr 2 i( د)���2منآ(د)بین موقعیت تخمینی MLS rnمن تو هستم�منمترتو�و موقعیت تخمینی هم ترازی را دنبال کنید rnr e f( د)��ه��(د)برای به روز رسانی و تنظیم در عملیات های مکرر ثبت می شود. با توجه به زنجیره تراز توسط یک چند جمله ای هموار یا مدل می شود یا در فواصل اسمی ثبت می شود.
rnمن تو هستم=rnr e f( د) +سیnآ( د) (rآr 2 i+ Δrآr 2 i( د) )�منمترتو�=��ه��(د)+سیآ�(د)(��2منآ+���2منآ(د))
جایی که rnمن تو هستم�منمترتو�موقعیت تخمینی مرکز IMU است، rnr e f( د)��ه��(د)موقعیت محور از تراز مرجع است، سیnآ( د)سیآ�(د)یک چرخش افقی از قاب تراز است ( آآ) به قاب ناوبری ( n�) rآr 2 i��2منآو Δrnr 2 i( د)���2من�(د)افست اسمی و آفست دینامیکی هستند که در قاب تراز اندازه گیری می شوند و ددفاصله مرجع است که به زنجیر مقطعی اشاره دارد.
2.2.3. معماری دوگانه IMU
علاوه بر ناوبری محدود به ریل، خطاهای ناشی از دادههای هندسی مسیر نادرست یا جابجاییهای ناسازگار بین اجراهای تکراری، عملکرد سیستم را محدود میکند. این مشکل با معماری دوگانه IMU با استفاده از یک IMU اضافی در محور مرجع حل می شود. استراتژی پردازش برای این معماری در شکل 2 خلاصه شده است . پردازنده مرجع IMU، داده های تراز و به روز رسانی سرعت را کنترل می کند، که به طور مستقل از پردازنده اصلی پشتیبانی می کند.

شکل 2. معماری دوگانه IMU.
اگرچه دادههای مسیر ریلی و تراز توسط IMU مرجع اضافی اصلاح میشوند، حرکات قطار ناشی از اثرات مختلف جبرانکنندههای محور قطار نامشخص است. ثبات دقت ناوبری محدود است. علاوه بر کنترل وضعیت و موقعیت جانبی از تراز مسیر، خطاهای موقعیت و سرعت در طول مسیر راه آهن هنوز نامشخص است.
2.2.4. به روز رسانی سرعت
همانطور که در بخش قبل ذکر شد، به روز رسانی های سرعت یا ZUPT برای کنترل خطاهای سرعت ناوبری اینرسی مهم هستند. اگر MLS در طول سرویس قطار معمولی اجرا شود، ZUPT می تواند در ایستگاه ها یا توقف موقت قبل از اتصالات اجرا شود. این به راحتی از طریق پردازنده های فیلتر کالمن بدون نیاز به تجهیزات اضافی برای به روز رسانی متناوب اجرا می شود.
برای قطارهای معمولی، سرعت سنجها معمولاً برای اندازهگیری سرعت نصب میشوند و از موقعیتیابی قطار (فاصله خطی) از طریق فاصله تجمعی یکپارچه از سرعت پشتیبانی میکنند. تکنیکهای دیگر، مانند ترانسپوندر/بالیز [ 24 ]، رادار داپلر [ 25 ]، سنجش جریان گردابی [ 26 ]، یا اندازهگیری اینرسی روشهای ممکنی هستند که دقت موقعیتیابی را برای عملیات قطار فعلی برآورده میکنند. تکنیکها و سنسورهای متعددی برای اندازهگیری سرعت با سطوح دقت مربوطه قابل استفاده هستند. میانگین گیری ساده / میانگین وزنی، سنجش اجماع، یا فیلتر کالمن رویکردهای ممکن برای همجوشی حسگر هستند [ 27 ].
علاوه بر همجوشی حسگر، الگوهای سرعت عملیات برای تخمین سرعت نیز قابل استفاده هستند. برای خدمات عادی قطار، شتاب و کاهش سرعت قطارها معمولاً تدریجی است تا آسایش مسافران و ایمنی عملیاتی حفظ شود. کنترل ناوبری توسط دانش رفتار سرعت قطار از طریق مدل سازی آن پشتیبانی می شود.
2.2.5. هماهنگی به روز رسانی
برای کنترل رشد خطاهای موقعیت، CUPT توسط اطلاعات موقعیت خارجی مستقل از برآورد INS پیاده سازی می شود. برای سیستمهای عمومی MLS، موقعیتیابی GNSS CUPT پیوسته را فراهم میکند، که باید با روشهای جایگزین برای عملکرد در یک محیط بدون GNSS جایگزین شود.
در راهآهنهای زیرزمینی، CUPT متناوب زمانی در دسترس است که قطار در حال نزدیک شدن به یک توقف در یک مکان خاص است تا امکان موقعیتیابی دقیق در جهت تراز ریلی فراهم شود. از آنجایی که سیستمهای راهآهن از یک الگوی عملیاتی منظم پیروی میکنند، موقعیتهای توقف موقت تقریباً شناخته شده هستند، مانند اتصالات و ایستگاههای ریلی. نوارهای بازتابنده را می توان در مناطق توقف نصب کرد و در هنگام کاهش سرعت قطار در ابرهای نقطه ای با چگالی بالا اسکن می شوند. اهداف اسکن شده برای CUPT خدمت می کنند و برای ثبت ابر نقطه تراز می شوند. از آنجایی که جزئیات اسکن شده با سرعت کمتر قطار افزایش مییابد، بهبود بالقوه در دقت موقعیتیابی انتظار میرود. علاوه بر این، سایر روش های موقعیت یابی استاتیک نیز برای بازنشانی خطاهای موقعیت در طول توقف قابل استفاده هستند. سطح دقت موقعیت بسته به دقت اطلاعات کنترل و انتخاب روش های جایگزین می تواند به سطح سانتی متر یا بهتر برسد. علاوه بر روش های تعیین موقعیت ایستا، الگوهای ارتعاشی منحصر به فرد از اندازه گیری های اینرسی ایجاد شده توسط اتصالات و اتصالات مسیر از مسیر پس از پردازش قابل شناسایی و با موقعیت ثبت می شوند.
برای حفظ عملکرد سیستم پیوسته، اجرای CUPT با اندازه گیری مداوم LiDAR یک جایگزین است. در محیط راهآهن، مسیر راهآهن یکی از ویژگیهای ضروری است که به طور مداوم برای URLها قابل اندازهگیری است. از دادههای اسکن، دو مسیر راهآهن استخراج شده و با پارامترهای تخمینی از تراز مرجع، مانند موقعیت خط مرکزی، جهتگیری تراز، شیب، ارتفاع فوقالعاده و جابجایی مسیر ریلی مقایسه میشوند. همانطور که در شکل 3 نشان داده شده است ، خطاهای ناهماهنگ موقعیت و نگرش عمود بر تراز مسیر قابل تشخیص هستند، اما خطاها در جهت تراز قابل تشخیص نیستند.
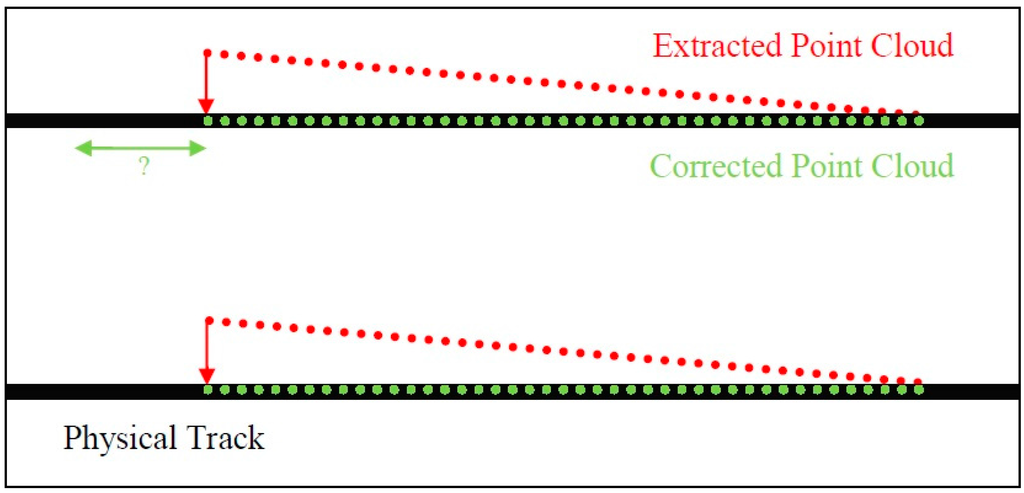
شکل 3. کنترل موقعیت از داده های LiDAR.
زیرساخت های راه آهن، مانند سکوی ایستگاه راه آهن، ابزار کنار مسیر یا سطح تونل، پایدار است تا نقطه عطف مرجع باشد. پیکربندی خاصی از پروفیلکنندههای لیزری نتایج را با تطبیق دادههای LiDAR در یک اجرای واحد، همانطور که در شکل 4 نشان داده شده است، بهبود میبخشد . پس از اولین پاس، ویژگی ها از داده های اسکن استخراج می شوند و به عنوان ویژگی های کنترل عمل می کنند. ویژگی ها شناسایی شده و با اندازه گیری های تکراری برای CUPT نیمه پیوسته مطابقت داده می شوند. با این حال، روش پردازش مرسوم ممکن است برای عملیات در حین پرواز مناسب نباشد.

شکل 4. تطابق بین داده های LiDAR.
مکان یابی و نقشه برداری همزمان (SLAM) تکنیکی است که به طور مرسوم برای سیستم های خودروهای روباتیک یا خودمختار برای کاربردهای بلادرنگ اعمال می شود، که هدف آن نقشه برداری از محیط و بومی سازی خود در داخل نقشه به طور همزمان است. جایگزین CUPT می شود و محلی سازی و جهت گیری را از طریق داده های نقشه برداری برای سیستم های MLS افزایش می دهد. پیاده سازی SLAM در حال حاضر در حال ظهور و به شدت مورد تحقیق است [ 28 ، 29 ، 30 ، 31 ] ، در حالی که کیفیت ابر نقطه از طریق الگوریتم های تکراری نزدیکترین نقطه (ICP) همانطور که در شکل 4 نشان داده شده است، بهینه شده است .
الگوریتم SLAM یک رویکرد ایدهآل بدون GNSS برای URLها است که میتواند تخمین ناوبری و اندازهگیری دادههای مکانی را بهتر ادغام کند. مشکل اصلی استفاده از SLAM در تونلهای راهآهن زیرزمینی عدم بسته شدن حلقه در یک سفر است، و بنابراین مسیر ناوبری به شدت به کیفیت ناوبری اینرسی یا نشانههای از پیش بررسیشده متکی است. همانطور که در پاراگراف های قبلی ذکر شد، مسیر ریلی می تواند به عنوان نشانه های ضروری مورد استفاده قرار گیرد. سایر زیرساخت های منحصر به فرد و قابل شناسایی نیز در فرآیند SLAM قابل اجرا هستند.
2.3. رویکرد یکپارچه برای URL
برای توسعه سیستم URLS، هندسه راه آهن و تخمین حرکت قطار مسائل اصلی برای کنترل ناوبری هستند. اگرچه کاستی های مختلفی برای رویکردهای فردی وجود دارد، عملکرد بالقوه سیستم از طریق یکپارچه سازی آنها بیشتر افزایش می یابد.
رویکرد یکپارچه ساده شده و در شکل 5 نشان داده شده است. همجوشی و تنظیم مستقل برای منابع مختلف اندازه گیری سرعت (1) برای تخمین زنجیره دقیق و به روز رسانی سرعت INS خدمت می کند. تصحیح از داده های تراز طراحی شده به تراز فیزیکی مسیر از طریق رویکرد ناوبری محدود به ریل برآورد می شود (2). تراز اصلاح شده جهت گیری و موقعیت مسیر راه آهن را توصیف می کند و برای CUPT پیوسته از طریق اندازه گیری های اسکن لیزری یا پیاده سازی از طریق SLAM (3) استفاده می شود. CUPT متناوب تکمیلی را می توان از طریق نشانه ها یا الگوهای ارتعاشی از اندازه گیری های اینرسی (4) پیاده سازی کرد، در حالی که هر روش موقعیت یابی ثابت (5) نیز برای افزایش دقت به پردازنده ادغام می شود. با این حال، معماری اساسی برای فرآیند URLS شامل سیستمهای فرعی مختلفی است که ممکن است برای عملیات بلادرنگ بسیار پیچیده باشند.
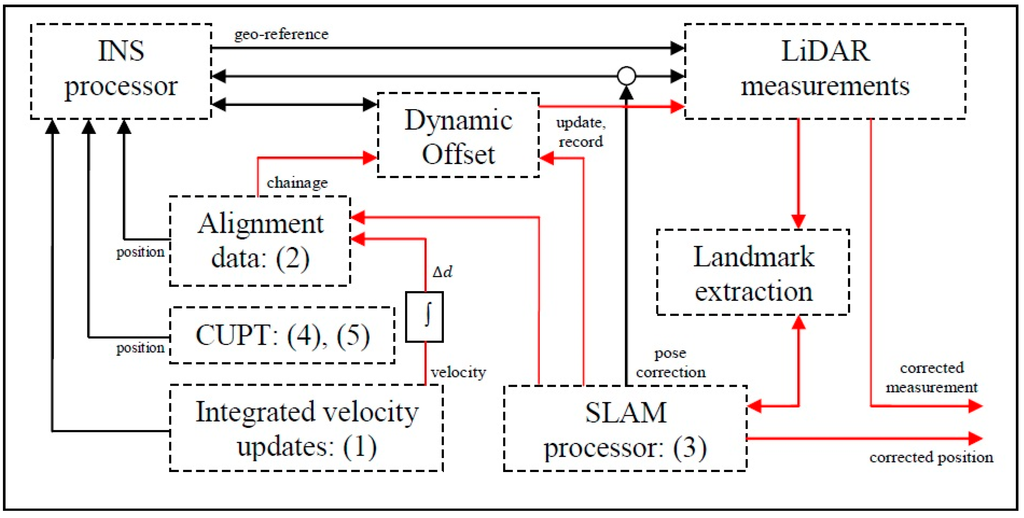
شکل 5. معماری ساده شده برای URL.
برای افزایش دسترسی به زمان واقعی، پیکربندی یک سیستم URLS را می توان با حذف و جایگزینی ناوبری اینرسی با اجزای جایگزین تجزیه و ساده کرد. راه حل کم هزینه موبایل Mapping کیفیت راه حل geo-reference مستقیم ساده شده را توسط گیرنده GNSS تک فرکانس، ژیروسکوپ تک محوری و کیلومتر شمار [ 32 ] نشان داده است. برای سادهسازی پیکربندی URLS، موقعیتیابی و ردیابی جهتیابی با ناوبری محدود به ریل با بهروزرسانیهای سرعت یکپارچه جایگزین میشود. روش ساده شده در شکل 5 با مسیرهای پردازشی که با رنگ قرمز نشان داده شده اند نشان داده شده است.
3. توسعه بالقوه و برنامه های کاربردی
بخش های قبلی روش های مختلفی را برای جایگزینی مولفه GNSS در یک سیستم اسکن لیزری راه آهن زیرزمینی نشان می دهد. جدا از استفاده ذاتی از یک سیستم URLS در ثبت سیستم ریلی به شکل ابر نقطه ای، چنین سیستمی پتانسیل افزایش عملیات راه آهن زیرزمینی را به روش های دیگر دارد. برخی از آنها در بخش های بعدی معرفی می شوند.
3.1. نظارت بر زمان واقعی یا نزدیک به زمان واقعی
پس از ایجاد پایگاه داده ابری نقطه راه آهن، URLS این پتانسیل را دارد که عملکردهای خود را بدون تکیه بر ناوبری اینرسی همانطور که ذکر شد حفظ کند. خطوط ریلی و/یا کابلهای برق بالای سر، ویژگیهای پیوستهای هستند که به بازیابی مسیر اولیه در قاب همترازی کمک میکنند و دقت نسبی دادههای ابر نقطه را حفظ میکنند. از این رو، شرایط تونل مانند ساختار اصلی و وجود اشیاء غیرمنتظره بلافاصله قبل از پردازش پس از پردازش بررسی می شود. رویکرد مبتنی بر SLAM صرفاً به دستگاههای اسکن لیزری و اطلاعات سرعت نیاز دارد، به گونهای که نظارت مستمر تونل و موقعیتیابی قطار در زمان واقعی انجام میشود و با ثبت نقطهای کلیدی مقطعی در پایگاه داده اصلاح میشود.
علاوه بر سیستمهای مانیتورینگ تونلهای موجود، URLS میتواند یک راهحل یکپارچه برای نقشهبرداری و نظارت بر بیشتر زیرساختهای زیرزمینی توسط یک سیستم اندازهگیری واحد مانند ساختار تونل، مسیر راهآهن، کابل هوایی، ماشین نقطهای، تجهیزات کنار راه و غیره باز کند. ممکن است جایگزین بخشی از سیستم های نظارتی موجود شود یا نتایج نظارتی مختلف را گسترش داده و تجسم کند . علاوه بر این، URLS یک راه حل پویا برای بهبود در دسترس بودن و انعطاف پذیری نظارت راه آهن ارائه می کند.
3.2. تشخیص خطر از طریق قطار
روش های مختلف برای تشخیص موانع قطار به طور گسترده در بینایی کامپیوتر یا جنبه های مرتبط مورد مطالعه قرار گرفته است [ 33 ، 34 ، 35 ، 36 ]. علاوه بر این، تحقیقات کارایی تشخیص برخورد قطار را با استفاده از تکنیک MLS نشان داده است [ 37 ]] که راه حل جامع تری و چند منظوره است. تشخیص برخورد تنها عملکرد URLS نیست، با این حال، شرایط بخش های مختلف تونل راه آهن به طور همزمان توسط هر قطار مجهز به سیستم URLS نظارت می شود. خطر برخورد با اشیاء کنار مسیر یا آسیب تجهیزات از طریق استفاده از آنها بهتر ارزیابی می شود. سیستم های URLS جایگزینی برای دستیابی به سطح بالاتری از قابلیت اطمینان و ایمنی خدمات از طریق مدیریت ریسک و تشخیص خطر در عملیات راه آهن ارائه می کنند.
3.3. بومی سازی قطار
روش محلی سازی قطار یک موضوع حیاتی برای ایمنی و مقررات قطار در سیستم های راه آهن است. روشهای سنتی معمولاً برای راهحلهای پشتیبان به تجهیزات کنار جاده تکیه میکنند که نصب و نگهداری آن پرهزینه است. سیستمهای سیگنالدهی مدرن به موقعیتیابی قطار دینامیکی نیاز دارند تا کارایی را با کنترل سیگنالدهی بلوک متحرک تسهیل کنند، که با روشهای محلیسازی قطار یا تشخیص قطار با حلقهها اجرا میشود.
یک راه حل بلادرنگ URLS جایگزینی برای روش های محلی سازی قطار فعلی است که از موقعیت یابی قطار با اندازه گیری های فضایی اطراف پشتیبانی می کند. چنین مشخصه ای به ویژه زمانی مفید است که سیستم سیگنالینگ راه آهن از کار افتاده باشد. می تواند به قطار کمک کند تا خود را برای مقداردهی اولیه سیستم بومی سازی کند. در عین حال، سیستمهای URLS وظیفه تشخیص قطار را برای جلوگیری از برخورد از عقب در حالت کاهش عملکرد قطار دارند.
3.4. اتوماسیون کنترل قطار
سیستم کنترل و سیگنالینگ قطار یک جزء حیاتی و کلیدی برای سیستمهای راهآهن مدرن است که سیگنالهای اساسی، کنترل و حفاظت قطارها و رابط نظارت بر شبکه قطار را برای ایمنی و کارایی فراهم میکند. سیستم کنترل قطار پیشرفته (ATCS)، سیستم کنترل قطار چین (CTCS) یا سیستم کنترل قطار اروپایی (ETCS) نمونههایی از استانداردهای ملی هستند که برای یکسان کردن سیستمهای ایمنی راهآهن طراحی شدهاند. استانداردها معمولاً در سطوح مختلف با توجه به یکپارچگی کنترل و نظارت قطار مشخص می شوند.
برای راهآهنهای زیرزمینی، درجه اتوماسیون یک مسئله حیاتی برای عملیات راهآهن است، زیرا ایمنی عملیات، ظرفیت خط و پایداری خدمات باید با کنترل و نظارت دقیق قطار به حداکثر برسد. سیستمهای URL از کنترل خودکار قطار با شناسایی و شناسایی موانع پشتیبانی میکنند که امکان پشتیبانی از عملیات قطار بدون راننده یا عملیات قطار بدون سرپرست را ممکن میسازد.
4. نتیجه گیری
در این مطالعه، مفهوم یک سیستم URL بدون GNSS که هدف آن جایگزینی اجزای GNSS و یکپارچه سازی MLS و سیستم های راه آهن زیرزمینی است، معرفی شد. استراتژی های فعلی برای قطع GNSS به طور خلاصه برای جایگزینی GNSS بررسی و اصلاح شد. به منظور به حداقل رساندن کمبودها، یک رویکرد یکپارچه برای پیکربندی URLS پیشنهاد میشود که میتوان آن را به روش بلادرنگ بدون اندازهگیری اینرسی ساده کرد. اعتقاد بر این است که راهحل URLS ایمنی و مدیریت سیستمهای راهآهن زیرزمینی را با کاربردهایی مانند بهبود سیستمهای نظارت، کمک به اتوماسیون قطار و افزایش ایمنی افزایش میدهد. علاوه بر این، URL ها می توانند به عنوان نمونه ای برای توسعه بیشتر سیستم های MLS بدون GNSS به طور کلی عمل کنند.
منابع
- ین، KS; آکین، ک. لوفتون، ا. روانی، ب. Lasky، TA با استفاده از اسکن لیزری سیار برای تولید مدلهای زمین دیجیتال سطوح روسازی . گزارش نهایی؛ دانشگاه کالیفرنیا در دیویس: دیویس، کالیفرنیا، ایالات متحده آمریکا، 2010. [ Google Scholar ]
- پوئنته، آی. گونزالس-خورخه، اچ. آریاس، پ. سیستمهای اسکن لیزری سیار مبتنی بر زمین Armesto، J. یک بررسی. در مجموعه مقالات کارگاه اسکن لیزری ISPRS 2011، کلگری، AL، کانادا، 29 تا 31 اوت 2011.
- پوئنته، آی. گونزالس-خورخه، اچ. مارتینز-سانچز، جی. آریاس، ص. بررسی فناوری های نقشه برداری و نقشه برداری موبایل. اندازه گیری 2013 ، 46 ، 2127-2145. [ Google Scholar ] [ CrossRef ]
- مورگان، دی. استفاده از LiDAR موبایل برای بررسی زیرساخت های راه آهن. نقشهبردار موبایل سیاهگوش. در مجموعه مقالات کمیسیون های FIG 5، 6 و کارگاه SSGA، دریاچه بایکال، روسیه، 23 تا 30 ژوئیه 2009. صص 32-40.
- لسلر، ام. پری، جی. McNease، K. استفاده از LiDAR تلفن همراه برای بررسی یک خط راه آهن برای موجودی دارایی. در مجموعه مقالات انجمن آمریکایی فتوگرامتری و سنجش از دور (ASPRS) 2010 کنفرانس سالانه، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 26-30 آوریل 2010.
- کرمر، جی. Grimm، A. The RailMapper – یک سیستم نقشه برداری LiDAR موبایل اختصاصی برای شبکه های راه آهن. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2012 ، 39-B5 ، 477-482. [ Google Scholar ]
- زو، ال. Hyypa, J. استفاده از اسکن لیزری هوابرد و سیار برای مدلسازی محیطهای راهآهن به صورت سه بعدی. Remote Sens. 2014 , 6 , 3075–3100. [ Google Scholar ] [ CrossRef ]
- یون، جی اس؛ ساگونگ، م. لی، جی اس. Lee, KS ویژگی استخراج یک لاینر تونل بتنی از داده های اسکن لیزری سه بعدی. NDT E Int. 2009 ، 42 ، 97-105. [ Google Scholar ] [ CrossRef ]
- Fraunhofer IPM—Clearance Profile Scanner CPS. در دسترس آنلاین: http://www.ipm.fraunhofer.de/content/dam/ipm/de/PDFs/produktblaetter/OF/LSC/CPS_web.pdf (در 18 ژوئیه 2014 قابل دسترسی است).
- ژو، جی. کندلیک، اس. Loffeld, O. INS/GPS یکپارچه سازی محکم با استفاده از فیلتر ذرات بدون عطر تطبیقی. جی. ناویگ. 2010 ، 63 ، 491-511. [ Google Scholar ] [ CrossRef ]
- نصار، س. شین، ای. نیو، ایکس. El-Sheimy، N. موقعیت یابی دقیق INS/GPS با سیستم های اینرسی مختلف با استفاده از الگوریتم های مختلف برای پل زدن خاموشی های GPS. در مجموعه مقالات هجدهمین نشست فنی بین المللی بخش ماهواره موسسه ناوبری، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 13 تا 16 سپتامبر 2005.
- مصطفی، م. هاتون، جی. Reid، B. محصولات GPS/IMU-رویکرد Applanix. در هفته فتوگرامتری 2001 ; Wichmann Verlag: هایدلبرگ، آلمان، 2001; صص 63-83. [ Google Scholar ]
- Thies, T. یک سیستم نقشه برداری موبایل مبتنی بر کشتی – از یکپارچه سازی حسگر تا محصولات چند منظوره. پایان نامه کارشناسی ارشد، دانشگاه هافن سیتی، هامبورگ، آلمان، 28 فوریه 2011. [ Google Scholar ]
- چو، CH; Chiang، KW عملکرد یک طرح ادغام فشرده INS/GNSS/فتوگرامتری برای برنامههای MMS مبتنی بر زمین در محیطهای محروم از GNSS. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2012 ، 39-B1 ، 479-484. [ Google Scholar ]
- بوویدا، جی. اولیویرا، ا. سانتوس، بی. بررسی دقیق تونل طولانی با استفاده از سیستم اسکن لیزری سیار Riegl VMX-250. در مجموعه مقالات کنفرانس بین المللی هوابرد و کاربران موبایل RIEGL 2012، اورلاندو، فلوریدا، ایالات متحده آمریکا، 27 فوریه تا 1 مارس 2012.
- ایمانیشی، ع. تاچیبانا، ک. Tsukahara، K. توسعه روش نگهداری دقت برای داده های سیستم نقشه برداری سیار (MMS) در منطقه نامرئی GPS. در مجموعه مقالات هفته کاری FIG 2011، مراکش، مراکش، 18 تا 22 مه 2011.
- کلاین، آی. فیلین، S. LiDAR و INS در دوره های قطع GPS برای سیستم های نقشه برداری اسکن لیزری سیار. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2011 ، 38-5/W12 ، 231-236. [ Google Scholar ]
- Bayud، FA; اسکالود، ج. Merminod، B. پارامترهای ناوبری مشتق شده از فتوگرامتری برای به روز رسانی فیلتر INS Kalman. در مجموعه مقالات کنگره 2004 انجمن بین المللی فتوگرامتری و سنجش از دور (ISPRS)، استانبول، ترکیه، 12 تا 23 ژوئیه 2004. صص 252-257.
- رونسلا، آر. رموندینو، اف. فورلانی، جی. پل فتوگرامتری قطعی GPS در نقشه برداری موبایل. Proc. Videometrics VIII SPIE-IS T Electron. تصویربرداری 2005 ، 5665 ، 308-319. [ Google Scholar ]
- حسن، ت. الوم، سی. El-Sheimy، N. پل زدن نقشه سیار زمینی با استفاده از تنظیمات فتوگرامتری. در مجموعه مقالات انجمن بین المللی فتوگرامتری و سنجش از دور (ISPRS) در سال 2006 سمپوزیوم اول، از حسگرها تا تصویرسازی، پاریس، فرانسه، 4-6 مه 2006. صص 128-139.
- چاپلین، BA تخمین حرکت از توالی تصویر استریو برای یک سیستم نقشه برداری موبایل. پایان نامه کارشناسی ارشد، دانشگاه کلگری، کلگری، AB، کانادا، جولای 1999. [ Google Scholar ]
- هانتر، جی. نقشه برداری موبایل-رویکرد StreetMapper. در هفته فتوگرامتری 2009 ; Wichmann: برلین، آلمان، 2009; صص 179-190. [ Google Scholar ]
- Gonçalves، JA; مندز، آر. آرائوجو، ای. اولیویرا، ا. Boavida، J. طرح ریزی مسطح داده های اسکن لیزری سیار در تونل ها. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2012 ، 39-B3 ، 109-113. [ Google Scholar ]
- هارتویگ، ک. گریم، ام. Meyer Zu Hörste، M. Lemmer, K. الزامات برای کاربردهای ایمنی مرتبط با موقعیت یابی در ترافیک ریلی – یک نمایشگر برای یک سکوی ناوبری قطار به نام “DemoOrt”. در مجموعه مقالات هفتمین کنگره جهانی تحقیقات راه آهن WCRR، مونترال، QC، کانادا، 4-8 ژوئن 2006.
- بکر، یو. هانسل، اف. می، جی. پولیاک، جی. اشنیدر ، E. موقعیت یابی خودکار خودرو به عنوان مبنایی برای سیستم حفاظت قطار کم هزینه در خطوط ثانویه . Technische Universität Braunschweig: Braunschweig، آلمان، 2006. [ Google Scholar ]
- Geistler, A. مکان قطار با سنسورهای جریان گردابی. در کامپیوتر در راه آهن هشتم ; Allan, J., Hill, RJ, Brebbia, CA, Sciutto, G., Sone, S., Eds.; WIT Press: ساوتهمپتون، انگلستان، 2002; صص 1053-1062. [ Google Scholar ]
- میرآبادی، ع. مورت، ن. اشمید، اف. کاربرد همجوشی حسگرها در سیستم های راه آهن. در مجموعه مقالات کنفرانس بین المللی IEEE/SICE/RSJ 1996 در مورد سیستم های هوشمند یکپارچه سازی چندحسگر، واشنگتن، دی سی، ایالات متحده آمریکا، 8 تا 11 دسامبر 1996. ص 185-192.
- السبرگ، جی. بورمان، دی. Nüchter, A. 6DOF نیمه سفت و سخت SLAM برای اسکن موبایل. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2012 در مورد ربات ها و سیستم های هوشمند، ویلامورا، پرتغال، 7 تا 12 اکتبر 2012. صفحات 1865-1870.
- سوزوکی، تی. کیتامورا، م. آمانو، ی. Hashizume، T. 6-DOF محلی سازی برای یک ربات متحرک با استفاده از نقشه های وکسل سه بعدی در فضای باز. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2010 در مورد ربات ها و سیستم های هوشمند، 18 تا 22 اکتبر 2010. صص 5737–5743.
- السبرگ، جی. بورمان، دی. Nüchter, A. راه حل های الگوریتمی برای محاسبه دقیق ابرهای نقطه سه بعدی حداکثر احتمال از سیستم عامل های اسکن لیزری سیار. Remote Sens. 2013 , 5 , 5871–5906. [ Google Scholar ] [ CrossRef ]
- استویانوف، تی. Lilienthal، AJ کسب ابر نقطه احتمال حداکثر از یک پلت فرم تلفن همراه. در مجموعه مقالات کنفرانس بین المللی IEEE 2009 در مورد رباتیک پیشرفته، مونیخ، آلمان، 9 تا 10 ژوئن 2009. صص 1-6.
- مادیرا، اس. گونسالوز، جی. Bastos، L. ادغام سنسور در یک سیستم نقشه برداری موبایل زمین کم هزینه. Sensors 2012 , 12 , 2935-2953. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- اوه، SC; کیم، جی دی؛ جئونگ، WT; پارک، تشخیص اشیاء مبتنی بر YT Vision برای ایمنی مسافران در سکوی راه آهن. در مجموعه مقالات کنفرانس بین المللی 2008 کنترل، اتوماسیون و سیستم ها، سئول، کره، 14 تا 17 اکتبر 2008. صص 2134–2137.
- Uribe، JA; فونسکا، ال. سیستم مبتنی بر ویدئو بارگاس، JF برای هشدار برخورد راه آهن. در مجموعه مقالات کنفرانس بین المللی کارناهان در سال 2012 در مورد فناوری امنیتی، بوستون، MA، ایالات متحده آمریکا، 15-18 اکتبر 2012. ص 280-285.
- Kruse، F. میلچ، اس. Rohling، H. سیستم چند سنسور برای تشخیص موانع در برنامه های کاربردی قطار. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE 2003، کلمبوس، OH، ایالات متحده آمریکا، 9 تا 11 ژوئن 2003. صص 42-46.
- پاسارلا، آر. توتوکو، بی. Prasetyo، مفهوم طراحی APP سیستم تشخیص موانع قطار در اندونزی. IJRRAS 2011 ، 9 ، 453-460. [ Google Scholar ]
- شوئر، جی. Nüchter، A. تشخیص و تجزیه و تحلیل برخورد ابر نقطه کارآمد در یک محیط تونل با استفاده از اسکن لیزری سینماتیک و جستجوی درخت KD. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2014 . [ Google Scholar ] [ CrossRef ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر