1. معرفی
پلهای با دهانه طولانی پیوندهای مهمی بین شهرها و کشورها هستند. به همین دلیل، بررسی عملکرد اجزای پل مهم است. سیستم های نظارت بر سلامت ساختاری (SHM) ابزار خوبی برای چنین تحقیقاتی هستند [ 1 ، 2 ]. سیستم های کوتاه مدت و بلند مدت SHM وجود دارد [ 1 ، 2 ، 3 ]. برای ارزیابی نوسانات یک پل با دهانه بلند، بهتر است از سیستم نظارت بلند مدت برای اعضای پل استفاده شود و رفتار پل برای ارزیابی سطح ایمنی در طول عمر آن بررسی شود. لیو و همکاران [ 4] اهداف سیستم های مانیتورینگ پل را به نتیجه رسانده اند. علاوه بر این، تغییر شکلهای سازههای بحرانی مانند پلها نیز باید از نظر اقتصادی ارزیابی شوند.
در دهه گذشته، SHM به یک فناوری پذیرفته شده فزاینده برای پیش آگهی وضعیت و ایمنی پل ها تبدیل شده است [ 2 ، 4 ، 5 ]. داده های موقعیت اندازه گیری مداوم از یک سیستم SHM آنلاین برای تخمین وضعیت تغییر شکل استفاده می شود که یکی از بحرانی ترین اشکال آسیب است که می تواند در یک پل با دهانه طولانی رخ دهد.
سیستم موقعیت یابی جهانی (GPS) به طور گسترده برای اندازه گیری برنامه های تغییر شکل، مانند سازه های هوشمند، استفاده می شود. گیرنده های GPS به عنوان استانداردهای جهانی زمان و فرکانس استفاده شده اند [ 6 ]. همراه با توسعه نرم افزار GPS، سخت افزار و بهبود سرعت نمونه برداری از گیرنده GPS، GPS برتری قابل توجهی در نظارت بر تغییر شکل های دینامیکی سازه های بزرگ با دقت بالا نشان داده است. پیشرفت های اندازه گیری GPS با یک سیستم سینماتیک بلادرنگ (RTK) توسط یو و همکاران مورد بحث قرار گرفته است. [ 7 ]. مشاهدات GPS اغلب توسط نویز و خطاها خراب می شوند، که ممکن است مفید بودن آنها را به شدت محدود کند [ 8 ، 9 ، 10]]. علاوه بر این، ویژگیهای نویز رکوردهایی که ارتعاشات دینامیکی را توصیف میکنند بر اندازهگیریهای GPS تأثیر میگذارند [ 6 ، 8 ]. انواع خطاهای GPS و نویز زدایی از اندازه گیری های GPS به وضوح در [ 9 ] توضیح داده شده است.
فیلتر یا صاف کردن اندازهگیریهای GPS مهم است و قبل از تجزیه و تحلیل دادههای مانیتورینگ GPS به منظور حذف خطاها و استخراج اطلاعات مورد نیاز برای محاسبه صحیح تغییر شکل یک سازه اعمال میشود. بسیاری از انواع فیلترها و صاف کننده ها برای استخراج اجزای حرکت ساختاری استفاده می شوند [ 6 ، 7 ، 8 ، 10 ]. امروزه تبدیل موجک (WT) یک ابزار قدرتمند در پردازش سیگنال است [ 9 ، 11 ، 12 ، 13]]. حذف نویز سیگنال موضوعی است که به طور مداوم توجه زیادی را به خود جلب می کند. بنابراین، در این مطالعه، از نویز زدایی تبدیل موجک برای بهبود اندازهگیریهای GPS استفاده میکنیم.
در واقع سیگنالهای اندازهگیری بلادرنگ غیر ثابت هستند و تغییرات فرکانس آنها به تغییرات آهسته و تغییر سریع تقسیم میشود. فیلترهای صاف کننده در GPS به دو گروه تقسیم می شوند: فیلترهای حوزه موقعیت و فیلترهای دامنه دامنه. فیلتر دامنه موقعیت همیشه عملکرد بهتری نسبت به فیلتر دامنه دامنه نشان می دهد [ 9 ]. علاوه بر این، موسوی و قلی پور [ 9 ] دریافتند که WT می تواند به طور موثری دقت موقعیت یابی GPS تک فرکانس را بهبود بخشد. علاوه بر این، Postalcoglu و همکاران. [ 14] مقایسه بین WT و فیلتر کالمن را برای داده های سیگنال نویز سری زمانی مطالعه کرده اند. آنها دریافتند که WT برای کاهش نویزها و خطاها در سیگنال سری زمانی مناسب است. بسیاری از مطالعات از WT برای حذف نویزها و خطاهای اندازه گیری GPS استفاده کرده اند [ 8 ، 9 ، 11 ، 13 ، 15 ].
بررسی حرکات و تغییر شکل پل ها از طریق بررسی عملکرد پل ها و پیش بینی ایمنی آنها در آینده، یک قانون اساسی در ارزیابی ایمنی پل ها ایفا می کند. پیش از این، روشهای زیادی برای پیشبینی اندازهگیریهای غیرخطی GPS استفاده میشد. یکی از این روش ها حل فیلتر کالمن است که به صورت یک فرآیند تصادفی نمایش داده می شود. فیلتر کالمن با استفاده از مدل های تصادفی [ 16 ] بیان می شود. چنین مدل هایی شامل مدل گاوس مارکوف مرتبه اول یا بالاتر [ 17 ] و مدل های خود رگرسیون [ 18 ] است. این مدل ها تنها توصیف تقریبی از رفتار حرکتی را ارائه می دهند.
از سوی دیگر، شبکه های عصبی مصنوعی (ANN) به طور گسترده ای برای پیش بینی رفتار سازه ها و کاهش خطاهای GPS استفاده شده اند [ 18 ، 19 ، 20 ، 21 ]. سیستم استنتاج عصبی فازی تطبیقی (ANFIS) به ANN بستگی دارد. علاوه بر این، از سیستم استنتاج فازی Takagi-Sugeno (TS) (FIS)، TS-FIS، برای تعریف مدل پارامترها استفاده می کند [ 22 ]. Iphar [ 23 ] مدلهای پیشبینی دینامیکی مختلف را برای ANN و ANFIS مقایسه کرده است و دریافت که ANFIS مدل دقیقتری در پیشبینی اندازهگیریهای دینامیکی است. مدل های پیش بینی سری های زمانی ANFIS در چند دهه اخیر مورد توجه گسترده محققان قرار گرفته است [ 22 , 24]]. مزیت نظریه ANFIS توانایی آن برای مقابله با داده های سری زمانی به جای داده های نقطه واضح است که برای توصیف خطاهای حرکت GPS استفاده می شود [ 16 ]. مدلهای کالمن و ANFIS با GPS استحکامی پیشبینی مدل کالمن (DGPS) در عبدالحمید و همکاران مقایسه شدند. [ 16 ]. مشخص شد که مدل ANFIS توانایی جبران عدم وجود اندازهگیریهای DGPS به روز و حفظ دقت موقعیتیابی ثابت را دارد.
هدف اصلی مطالعه حاضر طراحی یک مدل ANFIS برای ارزیابی حرکت پل GPS است. هدف این مطالعه نشان دادن استفاده از روش نویز زدایی تبدیل موجک در حذف نویزهای اندازهگیری GPS و مطالعه در دسترس بودن این روش برای دادههای نظارت بلندمدت GPS است. همچنین دقت مدل پیشبینی ANFIS را در اندازهگیری عملکرد پل بررسی میکند. برای انجام این کار، مطالعه بر ارزیابی رفتار پل Huangpu بر اساس SHM و مدل پیشبینی طراحی شده تمرکز دارد.
2. سیستم نظارت بر سلامت سازه پل
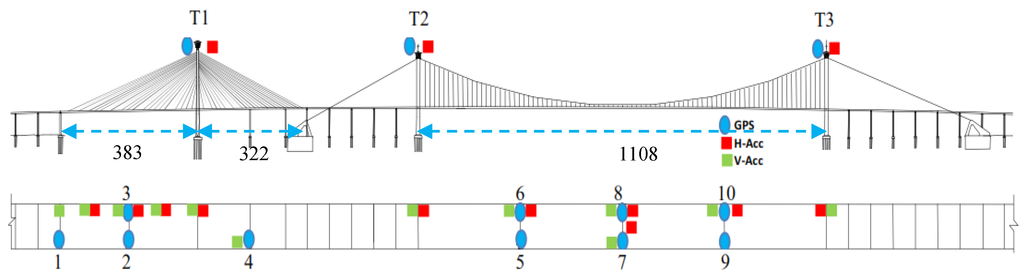
پل جاده Huangpu که در سال 2008 افتتاح شد، پروژه کلیدی در بزرگراه حلقه دوم در گوانگژو، چین بود. جزئیات در مورد طراحی پل و ویژگی های ساختاری آن را می توان در Wang et al. [ 25 ]. این پل، ناحیه تجاری مرکزی گوانگژو و منطقه پانیو را به هم متصل می کند ( شکل 1 ). از رودخانه مروارید بین کارخانه تعمیر و نگهداری کشتی در خارج از کشور گوانگژو و کشتی سازی بولومیائو می گذرد. این پل یک پل ترکیبی معلق و کابلی است. طول کل آن 7049 متر است. قسمت پل معلق دارای دهانه اصلی 1108 متر و قسمت کابلی 383 متر است ( شکل 2 ). عرض کل عرشه 41.00 متر و ارتفاع برج ها 226.14 متر است.
یک سیستم SHM طولانی مدت برای نظارت بر عملکرد پل طراحی و اجرا شده است ( شکل 2 ). این سیستم شامل بیست و دو شتاب سنج تک محوری است که برای اندازه گیری ارتعاشات عمودی و افقی به طور دائم بر روی عرشه نصب شده است. ده واحد GPS برای نظارت بر حرکات عرشه پل در سه جهت نصب شد ( شکل 2 ). سه واحد GPS اضافی و سه شتابسنج تک محوری اضافی برای نظارت بر حرکات و ارتعاشات برجها در دو جهت نصب شد ( شکل 2 ).
شکل 2. ارتفاع پل و سیستم نظارت بر سلامت.
داده های GPS جمع آوری شده از ایستگاه های مریخ نورد حل و فصل شد و ایستگاه پایه در نزدیکی پل ثابت شد. نقاط حرکت پل نسبت به نقطه ایستگاه پایه نشان داده شده است. یک سیستم مختصات پل محلی (BCS) برای تجزیه و تحلیل مشاهده و ارزیابی انتخاب شد. در این حالت، محورهای X، Y و Z به ترتیب ترافیک پل و جهت جانبی و عمودی را نشان می دهند. فرض بر این است که این سیستم مختصات برای مشاهده، ارزیابی و توصیف تغییر شکل پل مفید است. همچنین اجازه می دهد تا تفسیر بهتری از نتایج تجزیه و تحلیل به دلیل ارتباط آنها با جهت تغییر شکل انجام شود. گیرنده های جی پی اس دو فرکانس آنتن لایکا استفاده شد. زاویه قطع ارتفاع ماهواره 13 درجه استبا حداقل نه نمای ماهواره ای. ایستگاه مرجع، پیامهای تصحیح RTK را برای ایستگاههای مانیتورینگ GPS با یک فرکانس نمونهبرداری هرتز در هر جهت تازه میکند. به دلیل حجم بالای فایل های داده، جلسات به اندازه گیری های یک روزه برای اهداف پردازش تقسیم می شوند. داده های جمع آوری شده با داده های تولید شده توسط نوسانگرهای خود گیرنده مخلوط می شوند و سپس با استفاده از نرم افزار Spider 2.1 RTK پردازش می شوند. جزئیات بیشتر را می توان در Kaloop and Kim [ 26 ] یافت .
3. تبدیل موجک نویز زدایی از اندازه گیری های GPS
تبدیل موجک (WT) یک ابزار پردازش سیگنال است که در دهه گذشته توسعه یافته است. WT به دلیل در دسترس بودن برای ارزیابی حوزه های زمان و فرکانس برای سیگنال های غیر ثابت مانند جداسازی سیگنال و نویز بسیار مناسب است. همچنین دارای خواص محلی سازی خوب و تجزیه و تحلیل چند وضوحی در اندازه گیری های مشخصه سنسورها است. روش WT با جزئیات بیشتر توسط Xizheng و همکاران توضیح داده شده است. [ 13 ]. تبدیل موجک پیوسته باید در عمل گسسته باشد، به خصوص زمانی که بر روی کامپیوتر پیاده سازی می شود [ 13 ]. بنابراین در این مطالعه از نوع تبدیل موجک گسسته (DWT) استفاده شده است. WT برای سیگنال f(t) را می توان به صورت زیر در نظر گرفت، از Xizhengو همکاران [ 13 ]:
جایی که φالف ، بφآ،ب(t) موجک پیوسته در زمان (t) است که می تواند به صورت زیر ارائه شود:
جایی که a و b به ترتیب پارامتر مقیاس و پارامتر انتقال هستند. علاوه بر این، گسسته سازی به سمت پارامتر مقیاس پیوسته و پارامتر ترجمه پیوسته است، اما پارامتر زمان نیست. در این مورد b ∈ R، a ∈آر+، a ≠ 0ب∈ر، الف∈آر+،آ≠0و φ مجاز است، برای راحتی، a باید در گسسته سازی به مثبت محدود شود، و اکنون نیاز سازگاری را می توان به صورت زیر نشان داد:
جایی که φˆ(ω¯¯)φ^(ω¯)تبدیل فوریه را برای φ ( t )φ(تی).
به طور کلی، فرمول گسسته سازی پارامتر مقیاس WT پیوسته a و پارامتر ترجمه b را می توان به صورت زیر در نظر گرفت: a =آj0، b = کاj0ب0آ=آ0�، ب= کا0jب0، و j ∈ Jj∈جی. مرحله گسترش (آ0≠ 1 )(a0≠1)یک مقدار ثابت است؛ برای راحتی، همیشه فرض کنید آ0> 1a0>1. بنابراین، تابع موجک گسسته مربوطه φj ، k��,�در سطح j با ترجمه k را می توان به صورت زیر بازنویسی کرد:
ضریب گسسته سازی WT یک سیگنال f(t) را می توان به صورت زیر بیان کرد:
با این حال، فرمول سیگنال بازسازی مربوطه به صورت زیر است:
که در آن C ثابت مستقل از f(t) است .
یک مدل تک بعدی سیگنالها، مانند اندازهگیریهای حرکت GPS، با نویزهای افزایشی، مانند نویز ارتعاش و خطاهای GPS، میتواند به صورت f = s + e بیان شود . که در آن f و s به ترتیب نشان دهنده سیگنال های حاوی نویز و بدون نویز هستند. e یک سر و صدا است. پس از تجزیه سیگنال f توسط تبدیل موجک گسسته، می توان آن را به عنوان ضرایب موجک ( fn ) نشان داد. در ضریب موجک، سیگنال را می توان به صورت fn = sn+ en فرموله کرد . که در آن fn و sn یک ضریب موجک پر سر و صدا و یک ضریب واقعی را نشان می دهند. enیک ضریب نویز مستقل است. یک الگوریتم ساده زدایی نویز از طریق WT از سه مرحله تشکیل شده است [ 9 ، 13 ]: (1) محاسبه WT رو به جلو. (2) فیلتر کردن ضرایب موجک. و (3) محاسبه WT معکوس نتیجه به دست آمده. DWT سیگنال f(t) را به یک جزء تقریبی (A) و چندین جزء دقیق (D) تجزیه می کند:
معادله (4) خانواده ای از موجک ها را تعریف می کند φj ، k( تی )��،ک(تی)مربوط به کشش های دوگانه. با افزایش j، موجک با ضریب دو کشیده می شود. با افزایش k، موجک به راست جابه جا می شود [ 9 ، 13 ]. حتی با کشش های دوگانه، امکانات مختلفی برای موجک مادر وجود دارد که هر کدام طعم متفاوتی از DWT می دهد. با این حال، کشش دوگانه یک انتخاب راحت است. در این مطالعه به این انتخاب خواهیم پرداخت.
نویز زدایی موجک برای حذف نویز اندازه گیری سنسور و استخراج داده های تغییر شکل سازه مناسب است [ 9 ، 15 ]. در این مطالعه، تابع weden MATLAB [ 12 ] برای طراحی مدل نویز زدایی موجک برای مشاهدات GPS تک بعدی حرکت پل انتخاب شده است. در اینجا، انتخاب موجک مادر بهینه برای بهبود دادههای حذف نویز بسیار مهم است. انواع مختلفی از موجک های مادر وجود دارد که می توان از آنها استفاده کرد. برای DWT، موجکهای دوقلو ضلعی Daubechies، Symles (Sym) و B-spline معمولا استفاده میشوند [ 27 ]. اوگوندیپ و همکاران [ 28] مقایسه بین انواع مختلف موجک Daubechies و Symlest را با استفاده از آستانه نرم و سخت برای ارزیابی کاربرد فیلتر WT در داده های مانیتورینگ GPS مورد مطالعه قرار دادند و دریافتند که موجک Symlest برای حذف نویز داده های مانیتورینگ GPS با سختی مناسب است. آستانه ها علاوه بر این، موجک Sym قویتر از موجک Daubechies نشان داده شده است [ 27 ]. بنابراین، موجک Sym در این مطالعه انتخاب شده است. علاوه بر این، Kaloop و Kim [ 15 ] و Megahed و همکاران. [ 29 ] به این نتیجه رسیده اند که نظم تابع مقیاس بندی و موجک به وضوح با افزایش ترتیب موجک افزایش می یابد. با این حال، طول فیلتر قرار نیست کمتر از چهار ضریب باشد و خیلی بیشتر نباشد [ 29]]. در این مطالعه همبستگی بین اندازهگیریها و سیگنالهای نویز زدایی باید برای تعریف پاسخ دقیق تغییر شکلهای پل در نظر گرفته شود. اوگوندیپ و همکاران [ 28 ] و Kaloop و Kim [ 15 ] از 5 و 12 سطح تجزیه برای تخمین سیگنالهای GPS بینویز استفاده کردهاند. علاوه بر این، سطح تجزیه امپریالیستی برای سیگنال های سری زمانی را می توان با معادله زیر محاسبه کرد [ 30 ]:
که در آن L و N به ترتیب سطوح تجزیه و تعداد داده های مشاهدات هستند. برای تأیید انتخاب ترتیب موجک Sym و سطوح تجزیه، آمار نویز زدایی موجک و اندازهگیریهای اصلی GPS در جهت y برای عرشه پل در نقطه 1 در 10 سپتامبر 2009 در جدول 1 نشان داده شده است. بر اساس معادله ( 8 ) سطوح تجزیه را می توان بیشتر از پنج سطح انتخاب کرد. حداکثر (حداکثر)، حداقل (دقیقه)، و ریشه میانگین مربع (RMS) برای سیگنال های اصلی و نویز زدایی ارائه شده است. از جدول 1مشاهده می شود که نویز زدایی موجک باعث بهبود پارامترهای آماری اندازه گیری های GPS شده است. علاوه بر این، حداکثر و RMS به ترتیب 96٪ و 46٪ پس از اعمال WT به طور قابل توجهی کاهش می یابد. علاوه بر این، پارامترهای آماری Sym 8 و Sym 12 در سطوح هشت و 10 مقادیر نزدیک هستند.
جدول 1. نتیجه مقایسه ای کاربرد ترتیب مختلف موجک و سطح تجزیه (واحد: میلی متر).
ضرایب همبستگی محاسبهشده بین سیگنالهای اصلی و دمازدایی برای سطوح هشت و ۱۰ نشان میدهد که همبستگی به ترتیب برای سطح هشت و ۱۰ به ترتیب ۴۹/۰ و ۴۷/۰ است. در نهایت بر اساس نتایج پارامترهای آماری ترتیب مختلف موجک Sym، موجک با هشت سطح تجزیه دارای کمترین پارامترهای آماری Sym 8 و Sym 12 می باشد و بنابراین می توان از آن در این تحقیق استفاده کرد. بنابراین، موجک مادر Symlets 8 (“Sym8”) با تعدادی از تجزیه سطح j = 8 و آستانه سخت جهانی استفاده می شود. علاوه بر این، آستانه ضربی بدون تغییر مقیاس در این مطالعه انتخاب شده است.
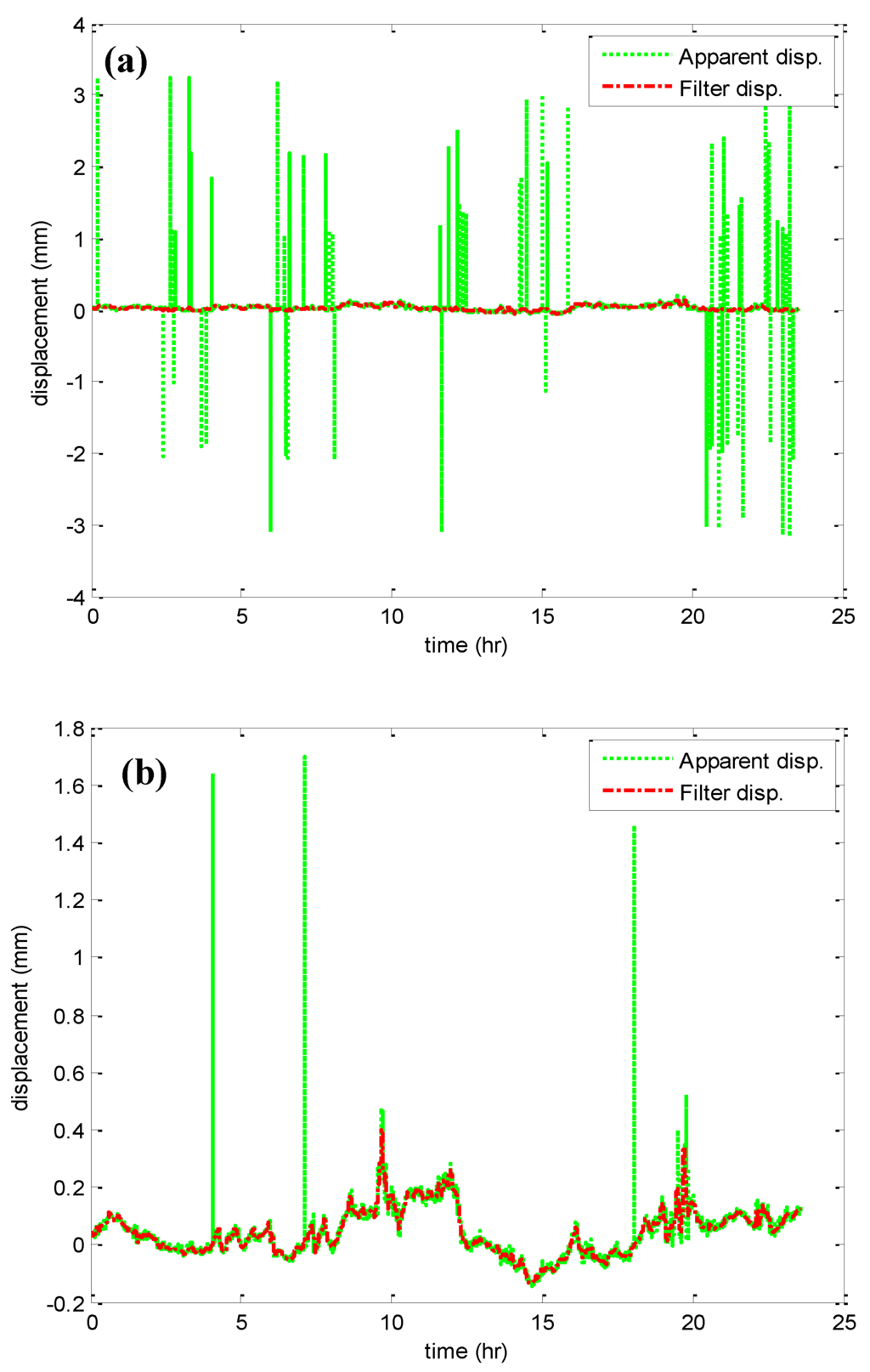
شکل 3. نویز زدایی WT از اندازه گیری های GPS ( الف ) نقاط 1 (نقطه عرشه) و ( ب ) T1 (نقطه برج) در جهت Y.
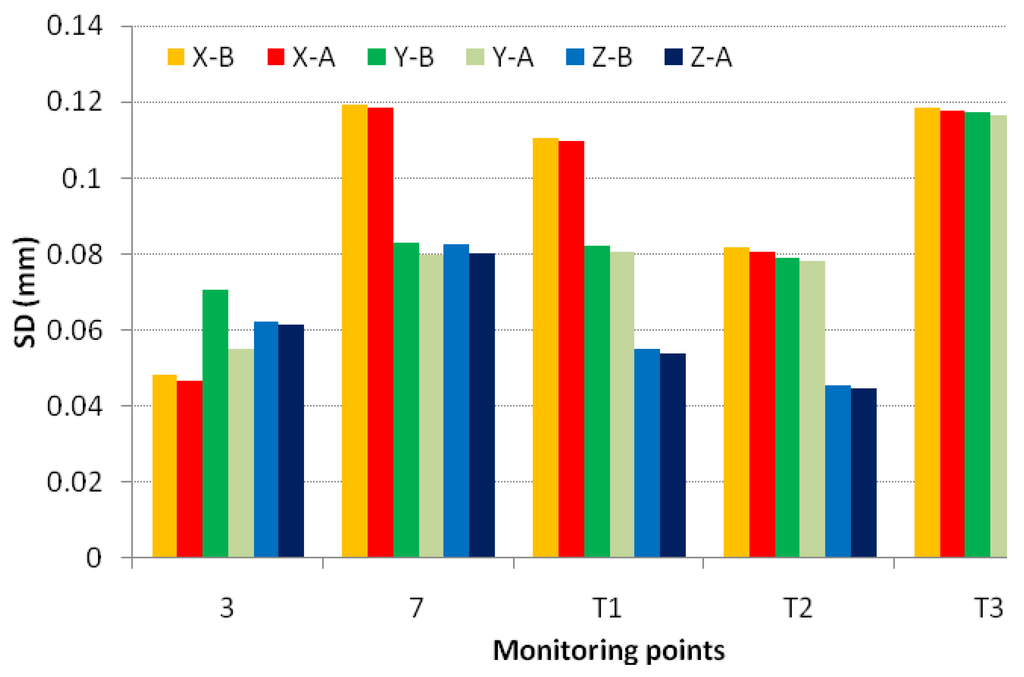
برای تأیید این روش، نویز زدایی موجک اندازه گیری های GPS برای عرشه پل و برج ها در نقاط 1 و T1 ( شکل 2 ) در 10 سپتامبر 2009 در شکل 3 نشان داده شده است . شکل 3 نشان می دهد که روش موجک اثرات نویز را حذف می کند. علاوه بر این، می تواند جزء حرکت نیمه استاتیک واقعی (تغییر کند) را استخراج کند. همچنین می تواند در محاسبه مولفه حرکت پویا (تغییر سریع) بر اساس روش چند فیلتری اعمال شده همانطور که در Moschas و Stiros [ 10 ] توضیح داده شده است، استفاده شود. شکل 4انحراف معیار (SD) اندازه گیری های انجام شده در عرشه پل و برج ها در 10 سپتامبر 2009 را نشان می دهد. سر و صدا میتوان متوجه شد که روش موجک نویزهای اندازهگیری را حذف کرده و همچنین دقت اندازهگیریهای نقطه عرشه را در جهت X و Z تا 3.0 درصد و در جهت Y 12.0 درصد افزایش داده است.
از سوی دیگر دقت اندازه گیری نقاط برج در سه جهت متعامد 1.5 درصد افزایش یافته است. این نتایج نشان میدهد که اندازهگیریهای GPS در نقاط عرشه، به دلیل خطاهای GPS، نویزتر بودند. علاوه بر این، شکل 4 نشان می دهد که اندازه گیری برج در جهت Z ناچیز است، در حالی که جابجایی نقاط عرشه در هر سه جهت قابل توجه است.
شکل 4. انحراف استاندارد GPS از سه جهت اندازه گیری قبل از (B) و پس از (A) نویز زدایی WT.
4. شناسایی مدل حرکت ANFIS
رویکرد سیستم استنتاج عصبی فازی تطبیقی (ANFIS) قوانین و توابع عضویت (MF) را از داده های آموزشی می آموزد [ 11 ، 22 ]. ANFIS یک شبکه تطبیقی از گره ها و پیوندهای جهتی است که از طریق آن گره ها به هم متصل می شوند. تطبیقی نامیده می شود زیرا برخی یا همه گره ها دارای پارامترهایی هستند که بر خروجی گره تأثیر می گذارد. این شبکه ها روابط بین ورودی ها و خروجی ها را شناسایی و یاد می گیرند. این کار با فازی شدن ورودی از طریق MF انجام می شود.
پارامترهای مرتبط با ورودی و خروجی MF با استفاده از یک الگوریتم، مانند انتشار به عقب و/یا حداقل مربعات [ 24 ] آموزش داده می شوند. بنابراین، بر خلاف پرسپترون چند لایه، که در آن وزن ها تنظیم می شوند، در ANFIS قوانین زبان فازی یا عبارات شرطی (اگر-آنگاه) به منظور آموزش سیستم تعیین می شوند. هنگامی که “اگر” است [مجموعه ای از شرایط پیشین ارضا می شود]، و “آنگاه” است [مجموعه ای از پیامدها را می توان استنباط کرد]، دو جزء اساسی از همه گزاره های منطقی وجود دارد [11]. برای اینکه یک سیستم ANFIS به درستی کار کند . در حالت پیشبینی، ساختار اولیه و پارامترهای آن (خطی و غیرخطی) باید با استفاده از یک الگوی ورودی-خروجی کافی از دادهها از طریق یک فرآیند یادگیری تنظیم یا تطبیق داده شوند [ 16] .]. مبانی نظریه سیستم استنتاج فازی (FIS) در مرجع عبدالحمید و همکاران تعریف شده است. [ 16 ].
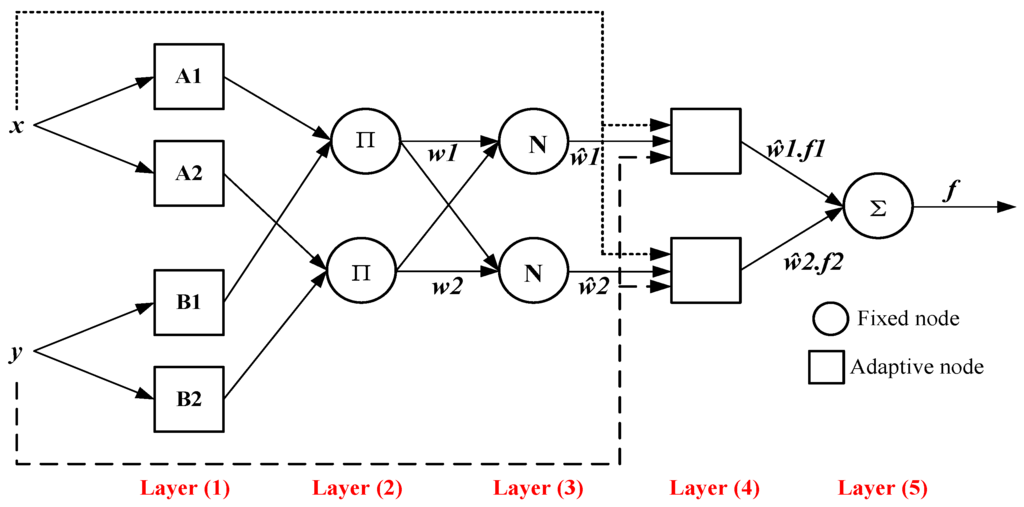
ساختار کلی ANFIS با دو ورودی (x و y) و یک خروجی (f) در شکل 5 ارائه شده است. لایه های تطبیقی بین شرایط مقدم و متعاقب توزیع شده اند. علاوه بر این، در دو شرایطی که تنظیمات پارامترهای آنها و در نتیجه عملکرد کل سیستم را مجاز میکند [ 22 ، 24 ]. در این مورد، برای سیستم فازی چند ورودی، تک خروجی (MISO)، قوانین فازی برای نگاشت توابع خطی ورودی ها در مورد TS-FIS شکل زیر را دارند:
R1: اگر ( x ) A 1 و ( y ) B 1 باشد ، پس
R2: اگر ( x ) A 2 و ( y ) B 2 باشد ، پس
که در آن A و B زیر مجموعههای فازی خاصی هستند که توسط یک ضریب غیرخطی، یعنی پارامترهای مقدماتی تعریف میشوند، در حالی که m ، n ، و r ضرایب خطی هستند که خروجی هر قانون فازی اعمالشده را تعیین میکنند و معمولاً به عنوان پارامترهای متعاقب شناخته میشوند. معماری یک ANFIS (نگاه کنید به شکل 5 ) معمولاً شامل پنج لایه است که در آن توابع گره (i) در هر لایه از یک خانواده تابع هستند.
لایه 1 : مقادیر ورودی با توجه به طبقهبندیکنندههای مختلف در متغیر ورودی فازی به عضویت منتقل میشوند. با این حال، گره خروجی ( ک1منکمن1) توسط:
جایی که μیک آی�آمنو μB i – 2�بمن–2به ترتیب MF برای ورودی های x و y هستند. MF میتواند هر تابع مناسبی باشد که پیوسته و قابل تمایز تکهای است، مانند اشکال گاوسی، ذوزنقهای، مثلثی یا زنگ تعمیمیافته [ 11 ، 12 ]. بررسی ویژگیهای آماری انواع مختلف MFs نشان میدهد که ریشه میانگین مربعات خطا (RMSE) برای اشکال زنگ تقریباً مقادیر نزدیک است، در حالی که RMSE برای تابع زنگ تعمیمیافته نسبتاً کوچک است. بنابراین، مشخص شد که MF مناسب تابع زنگ تعمیم یافته است که می تواند برای ورودی اول، x، به صورت زیر نوشته شود (و به طور مشابه برای ورودی دوم):
که در آن ( a i , b i , c i ) پارامترهای مقدماتی هستند که شکل MF را با مقادیر تغییر یافته تغییر میدهند [0, 1]. و آنها پارامترهای قابل تنظیم در شرایط پیش فرض هستند.
لایه 2 : عضویت های خروجی از لایه 1 در این لایه برای تعیین قدرت شلیک هر قانون استفاده می شود. آنها را می توان به صورت زیر محاسبه کرد:
لایه 3: قدرت شلیک نرمال شده در این لایه محاسبه می شود تا تخمین خروجی وزنی مربوط به هر قانون فازی اعمال شده محاسبه شود:
که در آن N تعداد ورودی سیستم را نشان می دهد.
لایه 4 : خروجی تخمین وزنی برای این لایه یک قدرت شلیک نرمال شده توسط یک چند جمله ای مرتبه اول برای روش TS مرتبه اول است و می توان آن را به صورت زیر بیان کرد:
که در آن پارامترهای بعدی ( mi , n i ,r i ) قابل تنظیم هستند و می توان از آنها برای تنظیم خروجی آن لایه استفاده کرد.
لایه 5: مجموع تخمین های وزنی حاصل از لایه خروجی قبلی را معمولاً فازی سازی می نامند. می توان آن را به صورت زیر نشان داد:
پارامترهای فرضی (غیرخطی) و متعاقب آن (خطی) FIS باید تنظیم شوند تا نمایشی بهینه از رابطه ریاضی واقعی بین فضاهای ورودی و خروجی ارائه شود [ 16 ، 24 ].
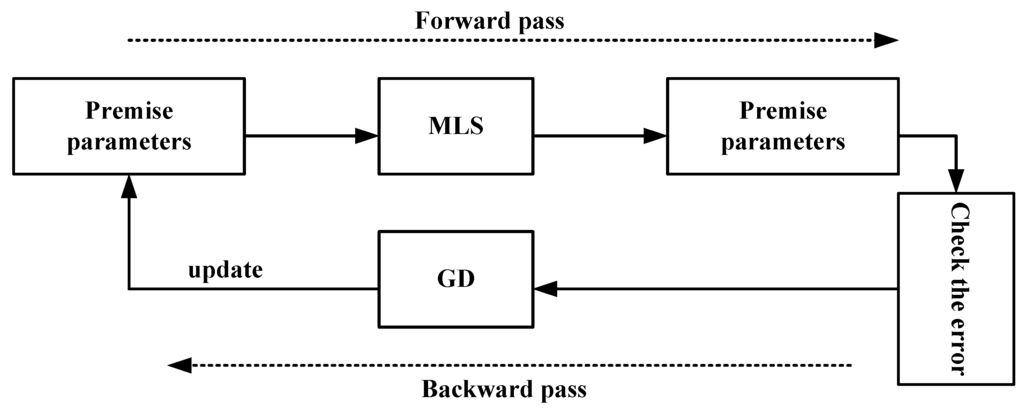
یک مدل فازی تقریبی توسط سیستم آغاز شده و سپس از طریق یک فرآیند یادگیری تطبیقی تکراری بهبود مییابد. الگوریتم آموزشی ANFIS مدل فازی اولیه را می گیرد و آن را با استفاده از یک تکنیک ترکیبی ترکیب می کند که شیب نزولی پس انتشار و میانگین حداقل مربعات الگوریتم های بهینه سازی [16، 22، 24 ] را تنظیم می کند . این الگوریتم خطاهای مدل را در هر دوره اندازه گیری می کند که معمولاً به عنوان مجموع مجذور اختلاف بین خروجی های واقعی و مطلوب تعریف می شود و خطاها را کاهش می دهد. روش گرادیان نزول (GD) برای تنظیم پارامترهای غیر خطی اعمال می شود، در حالی که روش میانگین حداقل مربع (MLS) برای بهینه سازی پارامترهای خطی [ 16 ] همانطور که در شکل 6 نشان داده شده است استفاده می شود..
شکل 6. الگوریتم تکنیک یادگیری ترکیبی ANFIS.
در این بخش، پیشبینی تغییر شکلهای پل مورد مطالعه و بررسی قرار میگیرد. اندازهگیریهای GPS که در یک روز (2 سپتامبر 2009) برای استفاده بهعنوان دادههای آموزشی گرفته شد، بهعنوان ورودی برای مدل ANFIS انتخاب شدند. به همین ترتیب، به منظور آزمایش و تأیید مدل، اندازهگیریهای GPS انجام شده در روز بعد (3 سپتامبر 2009) نیز در نظر گرفته شد. تمام داده ها با استفاده از روش نویز زدایی WT هموار شدند. اندازه گیری های استخراج شده در نقطه عرشه 7، در محور عمودی Z، در این بخش استفاده می شود. مختصات اندازهگیریها به یک سری زمانی از جابجاییهای عمودی ظاهری u حول یک صفر نسبی که سطح تعادل نقطه نظارت را نشان میدهد، تبدیل شد. این تبدیل تشابه به صورت زیر بیان می شود:
که در آن n تعداد مشاهدات را برای داده های نظارتی یک روزه نشان می دهد.
مدل تحقیق حاضر با اپراتور محصول بر اساس FIS اجرایی انتخاب شده است. داده های ورودی برای مدل ANFIS به زمان تاخیر برای توسعه مدل عملکرد بستگی دارد. سئو و همکاران [ 27 ] مجموعه ای از متغیرهای ورودی را برای آزمایش بهترین زمان تاخیر که می تواند برای بهبود مدل خروجی استفاده شود، اعمال کرده اند. Sudheer و همکاران [ 30 ] از ویژگی های آماری برای داده های ورودی برای انتخاب تاخیر زمانی ورودی استاندارد مدل استفاده کرده اند. علاوه بر این، مدل رگرسیون خطی چندگانه (MLR) برای ارزیابی میزان تأثیر هر متغیر و انتخاب مؤثرترین ورودی دادههای نظارت مداوم استفاده میشود [ 31 ، 32]. بنابراین، تأخیر انتخاب مدل MLR در این مطالعه برای انتخاب تأخیر زمانی مؤثر اعمال میشود. علاوه بر این، سه نوع شبکه عصبی فازی با MF های مختلف به کار گرفته می شوند. در شبکه اول، داده های ورودی به عنوان داده های مانیتورینگ GPS در زمان جاری (u(t)) در نظر گرفته می شوند. در شبکه دوم، دو مقدار وابسته که عبارتند از زمان فعلی و قبلی (u(t) و u(t- 1)) در نظر گرفته می شوند. در شبکه سوم، سه مقدار وابسته (u(t)، u(t-1) و u(t-2)) در نظر گرفته شده است. در هر شبکه، دو، چهار و شش MF در نظر گرفته شده است، با پنج دوره آموزشی. پایه قانون فازی اعمال شده دارای دو ورودی برای (x و y) همانطور که در شکل 5 نشان داده شده است ، و به همین ترتیب، برای یک و سه گره ورودی است.
برای انجام نتایج ارزیابی از سه نوع ضرایب آماری استاندارد استفاده می شود. اول، ضرایب همبستگی (R) که در رابطه (18) تعریف شده است و بین 0 و 1 متغیر است. که در آن هر چه مقدار R بیشتر باشد، کیفیت مدل بهتر است. دوم، ریشه میانگین مربعات خطا (RMSE) که در معادله (19) تعریف شده است، که در آن مقدار کوچکتر RMSE به معنای کیفیت بهتر مدل است. سوم، میانگین درصد مطلق خطا (MAPE) که در رابطه (20) تعریف شده و برای تأیید صحت مدل ها استفاده می شود. مقدار کامل MAPE صفر است که نشان دهنده بهترین تناسب خروجی مدل با مقادیر مشاهده شده است.
جایی که توoمنتومن�و توپمنتومنپبه ترتیب اندازه گیری حرکت مشاهده شده و پیش بینی شده در زمان i هستند . علاوه بر این، تابع همبستگی خودکار (ACF) باقیمانده ها (هتی=توoمن–توپمن)(هتی=تومن�–تومنپ)برای ارزیابی عملکرد مدل استفاده می شود. تأخیر (m) خود همبستگی (AC) در رابطه (21) تعریف شده است.
زمانی که مدل پارامتر (k) غیر صفر باشد، AC λ ( m ) صفر است. یک AC بزرگ زمانی که k غیر صفر است نشان می دهد که باقیمانده خطای میانگین صفر نیست و همچنین به این معنی است که ساختار مدل به سیستم بی ربط است، یا ممکن است نیاز به افزایش ترتیب مدل وجود داشته باشد. در کاربردهای دنیای واقعی، AC λ ( m ) زمانی که m غیرصفر باشد، به دلیل طول محدود نقاط مشاهده، نمی تواند صفر باشد. اگر مقدار AC در 95% فاصله اطمینان قرار گیرد، مقدار AC ناچیز است و این مقدار برابر با صفر در نظر گرفته می شود.
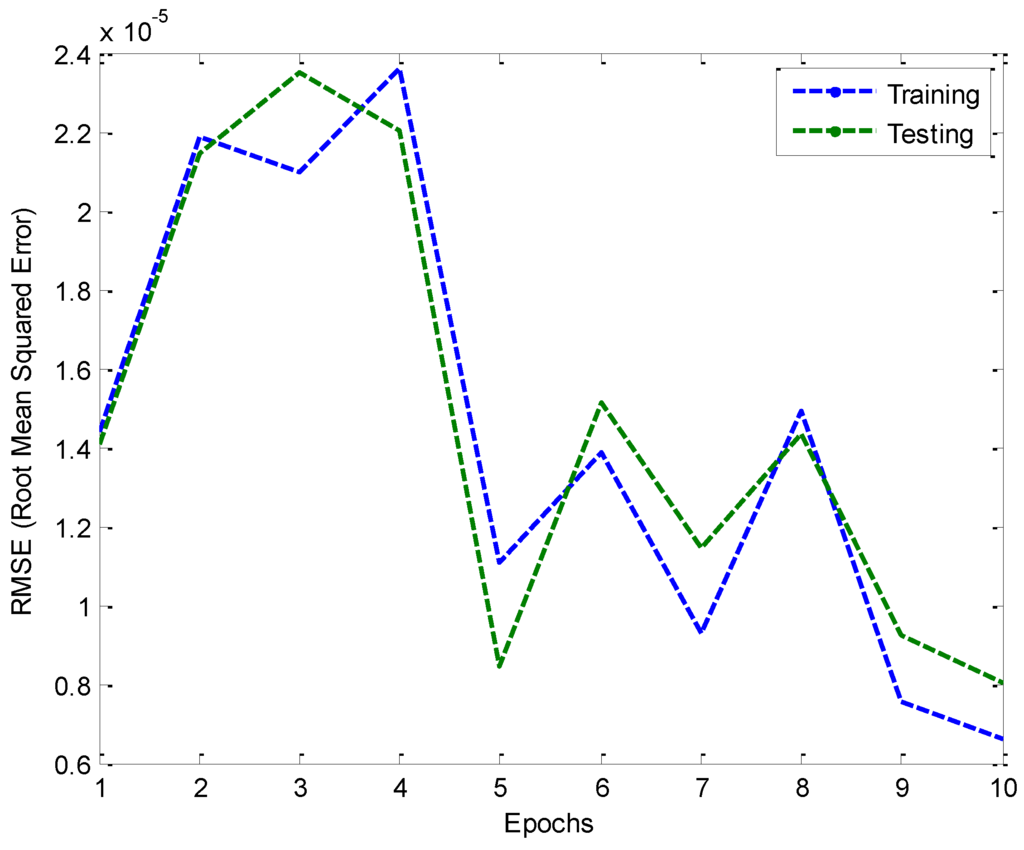
این مدل با استفاده از جعبه ابزار منطق فازی در بسته نرم افزاری متلب پیاده سازی شده است. توانایی مدل ANFIS برای دستیابی به اهداف عملکرد به پارامترهای از پیش تعریف شده ANFIS داخلی بستگی دارد. با این حال، ابتدا باید ویژگی های آماری مدل ANFIS مورد بحث قرار گیرد. مطالعه آماری اشکال زنگ نشان می دهد که RMSE برای داده های آموزشی با شکل زنگ تعمیم یافته 1.1 × 10-5 میلی متر است. شکل 7 RMSE داده های آموزش و آزمون را با عدد دوره نشان می دهد. از این رقم می توان دریافت که RMSE پس از دوره شماره چهار کاهش یافته است. بنابراین، در این تحقیق، عدد دوره ای که در نظر گرفته خواهد شد، پنج است.
با مجموعه داده آموزشی، ما دو MF به شکل زنگ تعمیم یافته را برای هر یک از ورودی ها برای ساخت مدل ANFIS انتخاب کردیم. جدول 2 خطاهای آماری داده های آموزشی را برای مدل پیش بینی نشان می دهد، در حالی که شکل 8 مدل ANFIS را برای حالت دو ورودی و MF نشان می دهد. از جدول 2مشاهده می شود که مقادیر MAPE با افزایش اعداد MF افزایش می یابد که به کاهش شدید غیرخطی بودن شبکه اشاره دارد. علاوه بر این، واضح است که انتخاب دو MF برای دو مورد MISO نسبت به کیس تک ورودی، تک خروجی (SISO) مناسب تر است. علاوه بر این، نشان می دهد که مدل SISO خطاهای بالایی را بین داده های اصلی و پیش بینی برآورد کرده است. همچنین مشاهده میشود که مدل دو ورودی مناسبتر از سه مدل ورودی است و با این مطالعه همخوانی دارد. نتایج جدول 2 نشان می دهد که دو MF رایج برای پیش بینی سری های زمانی با ساختار ورودی u(t) و u(t-1) مدل مناسبی است که می تواند در این مطالعه استفاده شود. بنابراین، مدل تک خروجی چند ورودی در این مطالعه مناسب است.
شکل 7. آموزش و آزمایش RMSE با شماره دوره.
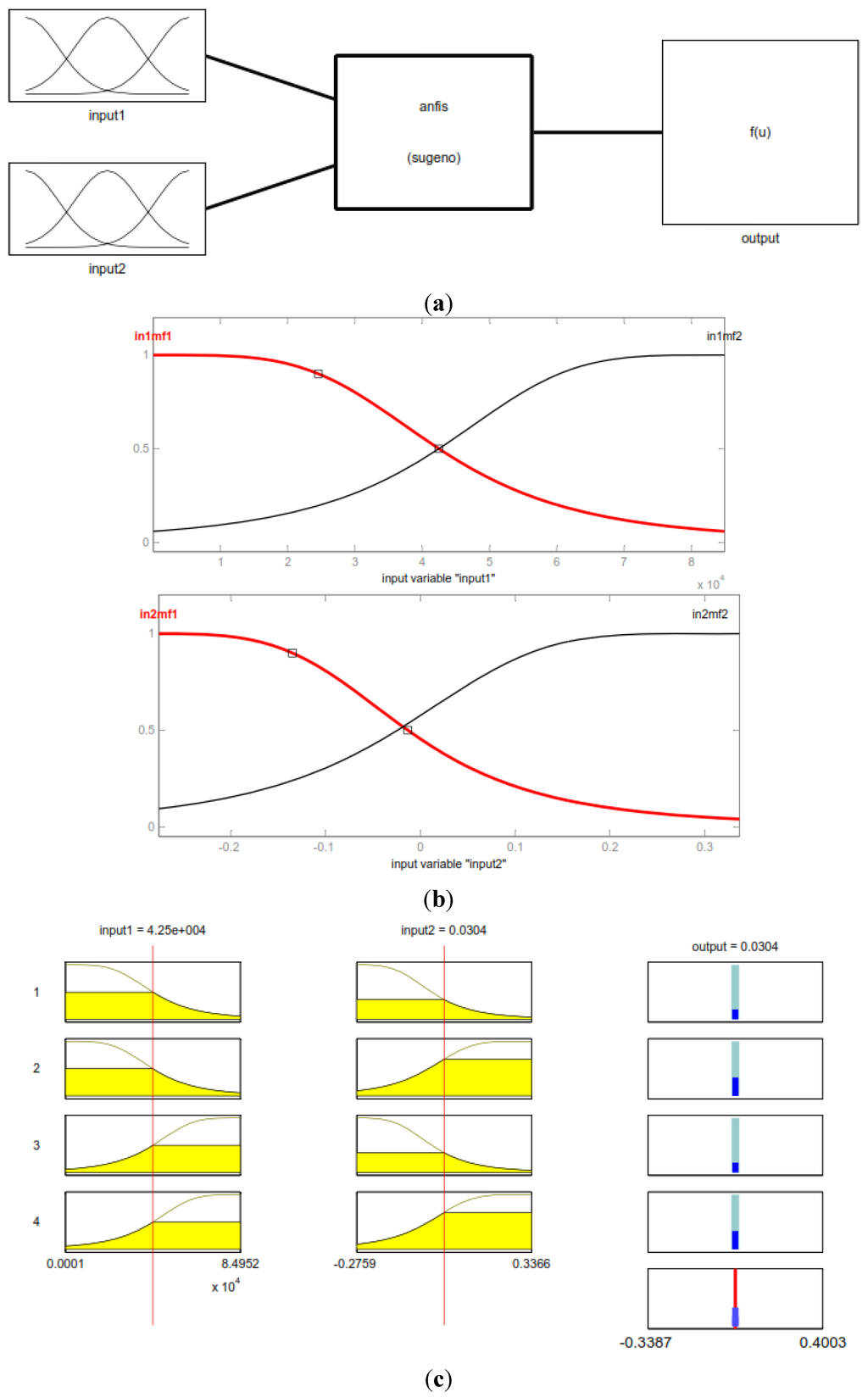
شکل 8 مدل استفاده شده را نشان می دهد. این مدل منجر به چهار قانون «اگر-آنگاه» می شود که شامل 24 پارامتر برای یادگیری است. شکل 8 الف مدل ANFIS را نشان می دهد که برای ارزیابی اندازه گیری نظارت بر زمان واقعی GPS در این مطالعه ساخته می شود. پارامترهای مقدماتی لایه ورودی محاسبه شده و MFهای تنظیم شده برای دو ورودی در شکل 8 ب نشان داده شده است. مشاهده می شود که تغییرات قابل توجهی در شکل MF اولیه از طریق فرآیند یادگیری ایجاد شده است. مدل Takagi-Sugeno (TS) اعمال شده و پارامترهای متعاقب آن ارزیابی میشوند.
جدول 2. تجزیه و تحلیل خطای نظارت بر داده های آموزشی GPS.
کاربرد سیستم ANFIS در شکل 8 ج ارائه شده است که شامل پنج مرحله اساسی محاسبه است. سیستم با فازی سازی ورودی ها شروع می شود، جایی که هر ورودی به طور موازی از طریق توابع عضویت پردازش می شود. دوم، قوانین با استفاده از عملگر فازی (AND) اعمال میشوند که منجر به قدرت شلیک وزنی به قسمت سوم مفهوم میشود و دادهها را از مقدمه به نتیجه منتقل میکند. مرحله چهارم تجمیع پیامدها در قوانین است و مرحله نهایی فازی سازی نتایج برای تولید خروجی نهایی است.
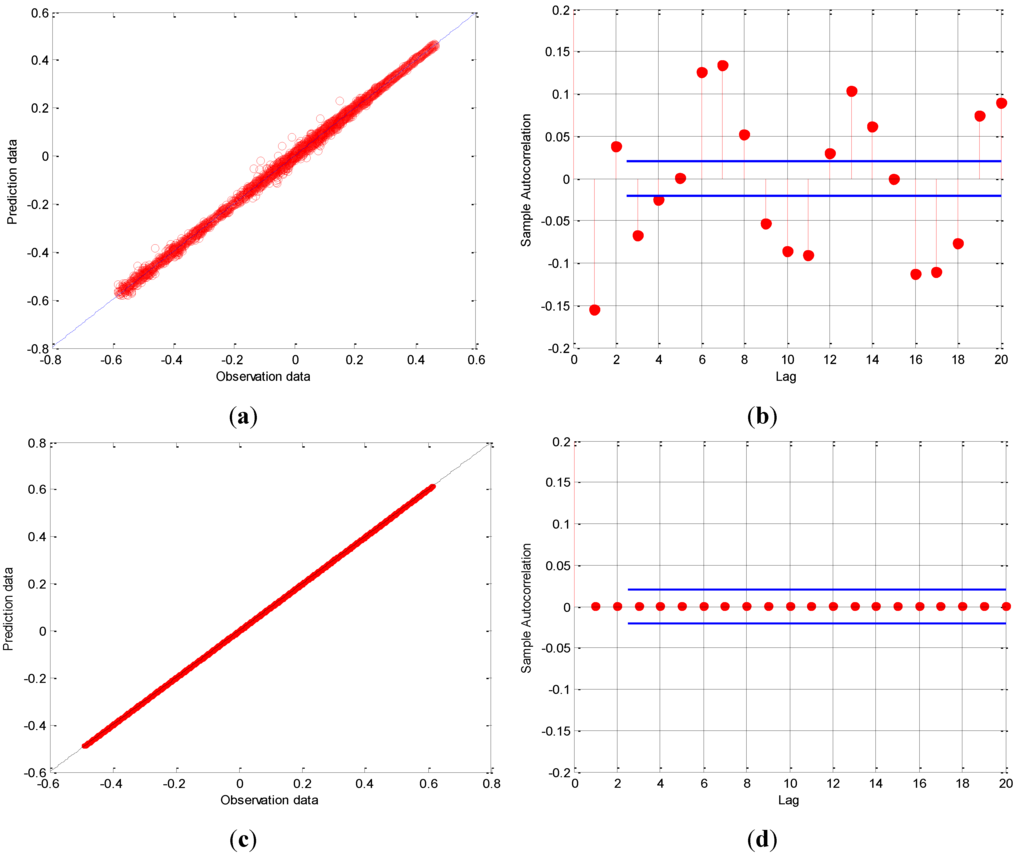
در اینجا، برای ارزیابی کاربرد روش موجک، عملکرد مدل ANFIS با استفاده از دادههای ورودی نویز زدایی با مدل ANFIS با استفاده از دادههای ورودی اصلی (بدون نویزسازی) مقایسه شده است، همانطور که در شکل 9 نشان داده شده است . شکل 9 a,c مقادیر پیشبینی را با استفاده از مدل ANFIS و اندازهگیری مانیتورینگ دادههای آزمایشی با تناسب دقیق برای سیگنالهای اصلی و بدون نویز نشان میدهد، در حالی که شکل 9 b,d تابع همبستگی خودکار نمونه (ACF) را برای خطاهای مدل تخمین زده شده از شکل 9 مشاهده می شود که مقادیر پیش بینی در دو مورد بسیار نزدیک به مقادیر داده های آزمون هستند .، قبل و بعد از اعمال روش موجک. علاوه بر این، همبستگی بین برازش دقیق و داده ها بسیار بالا است. باقیمانده پیشبینی مدل به ترتیب در داخل و خارج از فاصله اطمینان 95% ACF در مورد سیگنالهای نویز زدایی و اصلی است. علاوه بر این، می توان مشاهده کرد که MAPE 0.12 و INF٪، RMSE 1.33×10-3 و 4.46× 10-2 است.میلی متر، و R برای داده های آزمایش پیش بینی بعد و قبل از نویز زدایی به ترتیب 0.99 و 0.95 است. مقایسه بین مدل ANFIS در دو مورد برای سیگنالها نشان میدهد که روش موجک برای حذف اثرات نویز و بهبود دادههای پیشبینی ANFIS قابل توجه است. علاوه بر این، این نتایج نشان می دهد که هیچ تلفات اطلاعاتی برای مدل پیش بینی با استفاده از روش موجک شناسایی نشده است و همچنین ایمنی بالای عملکرد پل را تایید می کند. بنابراین پیشنهاد میشود که از این مدل در پیشبینی و ارزیابی کارآمد تغییر شکلهای پلها پس از حذف اثر نویز استفاده شود.
شکل 8. مدل طراحی ( الف )، ( ب ) تنظیم MF و ( ج ) کاربرد مدل مدل پیشبینی ANFIS دو سری زمانی MF و دو ورودی.
شکل 9. حرکت پیشبینی ANFIS برای اندازهگیریهای GPS ( a ) قبل و ( c ) بعد از اعمال فیلتر موجک و ACF برای دادههای نظارت آزمایشی ( b ) قبل و ( d ) پس از اعمال فیلتر.
5. تجزیه و تحلیل عملکرد پل
5.1. نظارت بر تجزیه و تحلیل داده ها
در این بخش، حرکات عرشه پل و برج ها بر اساس اندازه گیری های GPS و شتاب سنج ها تحلیل می شود. دو نقطه نظارت در وسط دهانه عرشه (نقاط 3 و 7) انتخاب شده است.
5.1.1. نقاط مانیتورینگ عرشه
شکل 10 a,b جابجایی تبدیل تشابه را نشان می دهد (به معادله (16) مراجعه کنید) اندازه گیری های هموار نقاط نظارت عرشه 3 و 7 در 10 سپتامبر 2009. محدوده جابجایی آماری برای همان نقاط نظارت در 5، 10، 15، 20 و 25 سپتامبر 2009 در شکل 10 نشان داده شده است . شکل 10 کارایی بالای نویز زدایی WT را در صاف کردن و حذف نویزهای اندازه گیری GPS در نقاط نظارت عرشه نشان می دهد. می توان نتیجه گرفت که حداکثر دامنه جابجایی در سه جهت در نقطه 7 اتفاق افتاده است. علاوه بر این، همبستگی بالایی (0.85) بین محدوده جابجایی برای نقطه 3 نشان داده شده است. این نشان دهنده پایداری بیشتر در نقطه 3 به دلیل اثر طول دهانه پل است. .
مشاهده می شود که حداکثر دامنه جابجایی برای نقطه 7 در جهات Y و Z در 15 سپتامبر 2009 رخ داده است، در حالی که در جهت X و Y در 25 سپتامبر 2009 رخ داده است. بنابراین جابجایی های نقطه 7 در هر سه اندازه گیری رخ داده است. جهت ها، در حالی که تفاوت اصلی بین اندازه گیری ها به بار ترافیکی متغیر با زمان مربوط می شود. با این حال، نقطه 7 در مقایسه با سایر نقاط مانیتورینگ پل، تحرکات قابل توجهی را متحمل شد. علاوه بر این، مقدار دامنه جابجایی نشان دهنده ایمنی پل در رفتارهای حرکتی استاتیک و نیمه استاتیک است.
فرکانس اساسی (فرکانس حالت اول) اندازه گیری شتاب نقطه 7 نشان می دهد که تفاوت فرکانس اساسی برای روزهای مختلف نظارت ناچیز است. فرکانس های اساسی نقطه 7 برای تمام روزهای نظارت به ترتیب 0.585 هرتز، 0.585 هرتز و 0.1953 هرتز برای جهت های X، Y و Z می باشد.
5.1.2. نقاط مانیتورینگ برج ها
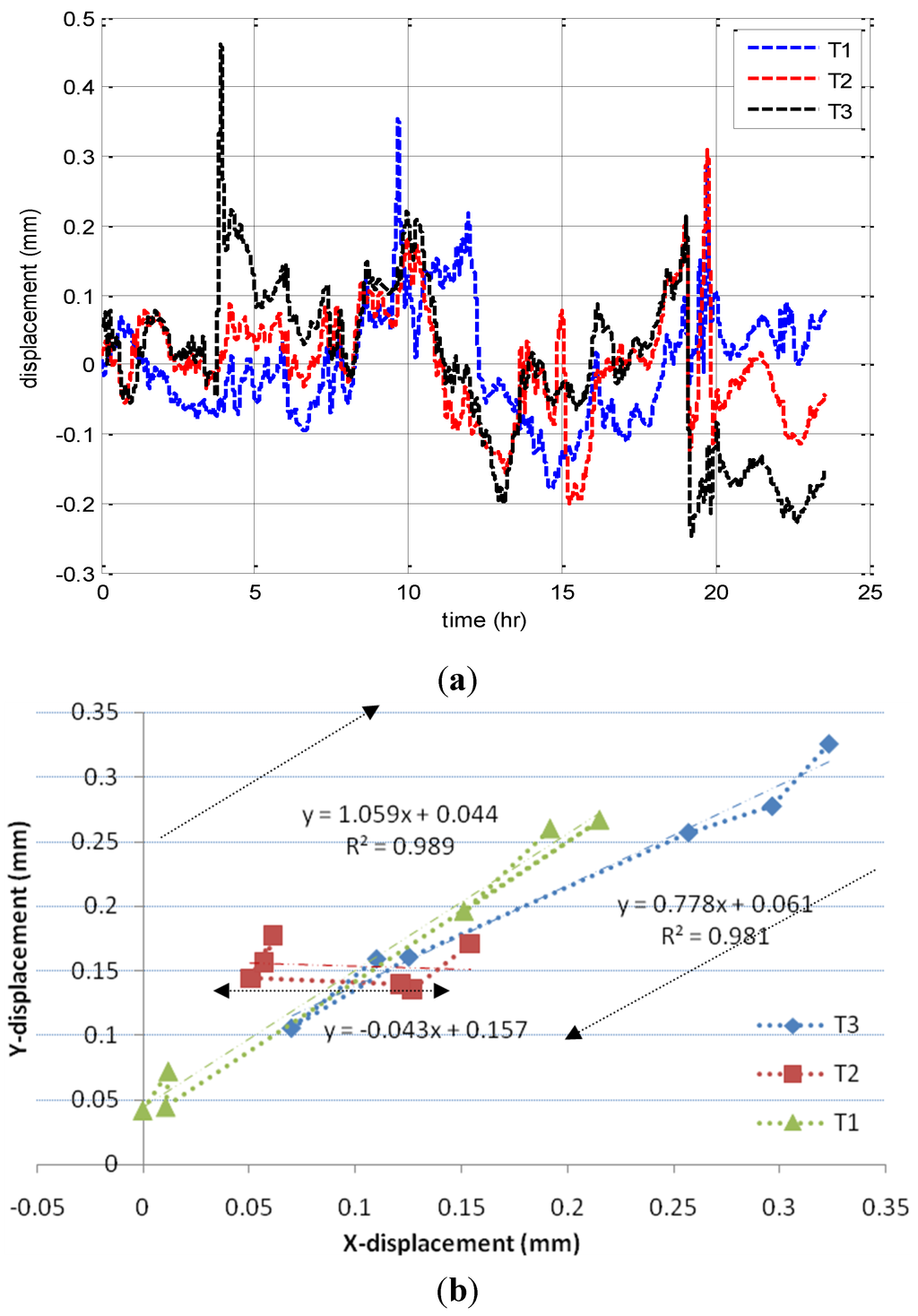
شکل 11، دمازدایی WT اندازهگیریهای GPS سه نقطه نظارت در برجهای پل در 10 سپتامبر 2009، و همچنین میانگین جابجاییها در 2، 5، 10، 15، 20 و 25 سپتامبر 2009 را نشان میدهد. سه امتیاز از شکل 11مشاهده می شود که ضرایب همبستگی بین T1 و T2، T1 و T3، و T2 و T3 به ترتیب 0.30، 0.04- و 0.63 است. این نشان دهنده همبستگی بالایی بین اندازه گیری های انجام شده در دو نقطه نظارت بر روی برج های پل معلق است. نتایج حاکی از همبستگی ضعیفی بین اندازهگیریهای انجامشده در برج بخش پل کابلی و برج مجاور بخش پل معلق است. هیچ ارتباطی بین اندازه گیری های انجام شده در برج بخش پل کابلی و برج دور قسمت پل معلق نشان داده نشده است. محدوده جابجایی (mm) برای اندازهگیریهای گرفته شده در T1، T2، و T3 به ترتیب (0.215، 0.225)، (0.104، 0.042)، و (0.253، 0.220)، برای جهتهای (X، Y) است.
شکل 11 a توضیح می دهد که حداکثر جابجایی سه نقطه نظارت بر برج ها سه بار رخ داده است، در حالی که حداکثر جابجایی محدوده برای نقطه T3 از T2 و T1 بیشتر است. این نتیجه نشان میدهد که دهانههای طولانی تعلیق و بخشهای پل کابلی بر حرکت برجها متفاوت تأثیر میگذارند. شکل 11b جابجایی سه برج را در هر دو جهت X و Y توصیف می کند. مشاهده می شود که جابجایی برج های خارجی (T1 و T3) در محدوده جابجایی برج T2 داخلی است، در حالی که حرکت T2 را می توان فقط در جهت X فرض کرد. علاوه بر این، برازش خطی جابجایی ها نشان می دهد که حرکات نقاط T1 و T3 تقریباً خطی هستند. مشاهده می شود که مقادیر بالای میانگین بسته جابجایی ها در روزهای پایش 15، 20 و 25 شهریور 1388 رخ داده است. بدین معنی که جابجایی کم و در نتیجه ایمنی دکل ها در دو جهت در زمان پایش رخ داده است. در اجزای حرکت ایستا و نیمه استاتیک.
نتایج فرکانس بنیادی اندازهگیریهای شتابسنج نقاط پایش سه برج نشان میدهد که فرکانس بنیادی این نقاط در جهات X و Y در روزهای مختلف نظارت تقریباً یکسان بوده و برابر با 0.5859 هرتز است.
شکل 10. سری زمانی جابجایی عرشه پل در 10 سپتامبر برای ( الف ) نقطه 3. ( ب ) نقطه 7 و ( ج ) محدوده جابجایی اندازهگیریهای GPS.
شکل 11. ( الف ) سری زمانی جابجایی در جهت Y و ( ب ) اندازه گیری های پراکنده GPS برای سه برج پل (فلش ها به جهت حرکت اشاره دارد).
5.2. تحلیل مدل عملکرد پیش بینی ANFIS
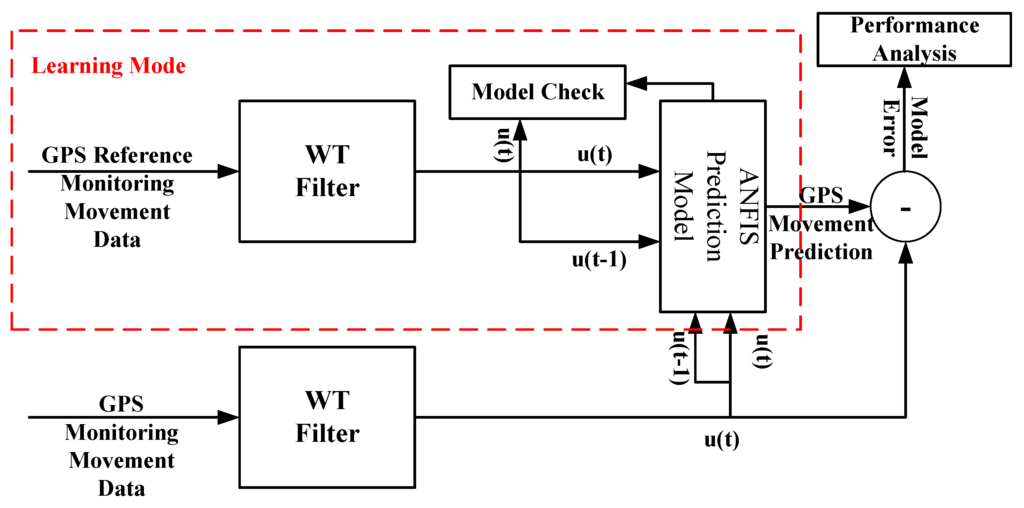
شکل 12 مدل عملکرد طراحی پل را بر اساس سیستم ANFIS با اندازه گیری های GPS حذف نویز WT نشان می دهد. در این بخش، برای عملکرد حرکتی پل GPS، از اندازهگیریهای GPS انجام شده در 2 سپتامبر 2009، به عنوان مرجع برای نظارت بر دادههای حرکت استفاده میشود، در حالی که اندازهگیریهای انجامشده در 15 و 25 سپتامبر 2009 به عنوان دادههای بررسی برای تجزیه و تحلیل استفاده میشوند. عملکرد پل در آن روزها. بر اساس تجزیه و تحلیل اندازه گیری ها در قسمت قبل، مشخص شد که بحرانی ترین نقطه، نقطه 7 است که بر روی عرشه پل قرار دارد. این نقطه مانیتورینگ دامنه حرکتی بالایی دارد.
شکل 12. تحلیل عملکرد مدل پیش بینی GPS.
شکل 13. عملکرد حرکت TheANFISPprediction در ( a ) 15 سپتامبر. ( ب ) 25 سپتامبر و ACF برای زمان بررسی در ( ج ) 15 سپتامبر. ( د ) 25 سپتامبر طراحی مدل ANFIS.
در این بخش، اندازه گیری های انجام شده در جهت Z برای بررسی عملکرد پل انتخاب می شوند. پیش بینی حرکت و خطای پیش بینی بررسی ACF در شکل 13 نشان داده شده است . جدول 3 عملکرد آماری پیش بینی شده برای خطاهای پیش بینی را نشان می دهد. از شکل 13 و جدول 3 ، مشاهده می شود که نتایج مدل پیش بینی با اندازه گیری های نظارتی پل ارتباط زیادی دارد. علاوه بر این، اهمیت همبستگی خودکار خطای پیشبینی در بازه اطمینان 95 درصد برای دو روز بررسی نظارت نشان داده شده است. این به این معنی است که اطلاعات پیشبینی جنبش هیچ ضرری نداشته است. علاوه بر این، تجزیه و تحلیل آماری منجر بهجدول 3 نشان می دهد که خطاهای بررسی دو روز پایش ناچیز است. می توان نتیجه گرفت که عملکرد عرشه پل طی یک ماه نظارت مستمر در تحلیل زمانی و فرکانسی بسیار ایمن است.
جدول 3. تاریخ بررسی نظارت بر عملکرد آماری.
عملکرد طراحی مدل ANFIS از همین نتیجه پشتیبانی می کند. علاوه بر این، مدل پیشبینی مناسب است و میتواند با دادههای نظارت آتی برای بررسی عملکرد پل به طور مستقیم تحت بارهای مختلف استفاده شود. مشخص شد که روش ANFIS یک انتخاب خوب و ابزار قدرتمندی برای مدلسازی عملکرد پلها است. این نتیجه با نتایج به دست آمده توسط پانتازیس و الویزاکو [ 20 ] مطابقت دارد.
6. نتیجه گیری
با بررسی دقیق نتایج ارائه شده در این تحقیق می توان نکات خاصی را بیان و نتیجه گیری کرد.
استفاده از روش نویز زدایی تبدیل موجک (WT) یک ابزار فیلتر قدرتمند برای نویز زدایی و در نتیجه صاف کردن اندازهگیریهای GPS، بدون از دست دادن اطلاعات در اجزای استاتیک و نیمه استاتیک حرکات را نشان میدهد. به عبارت دیگر، نتایج اندازهگیریهای انجامشده در نقاط مانیتورینگ واقع در برجها و عرشه پل Huangpu، توانایی روش حذف نویز WT را برای بازسازی اندازهگیریهای GPS نشان داد، در حالی که دقت اندازهگیریها را ثابت نگه داشت.
سیستم استنتاج عصبی فازی تطبیقی برای سیستم نظارت بلندمدت RTK-GPS خروجی برای پیشبینی حرکات GPS نقاط نظارت عرشه پل استفاده شد. سه نوع شبکه عصبی فازی با توجه به الگوهای متغیر ورودی در نظر گرفته شد، در حالی که هر شبکه با دو، چهار و شش تابع عضویت اجرا شد. برای دستیابی به این منظور، از اندازه گیری یک روزه GPS نقطه نظارت بر روی عرشه استفاده شد.
نتایج پیشنهادی روش سیستم استنتاج عصبی فازی تطبیقی یک تخمین حرکت قابل اعتماد ارائه میکند که میتواند برای ارزیابی عملکرد نقطه نظارت مورد استفاده قرار گیرد. علاوه بر این، مشخص شد که تابع دو عضویت برای اعمال با دو متغیر ورودی مناسب و سریع است. باقیمانده دادههای پیشبینی تست در بازه اطمینان 95% برای تابع همبستگی خودکار نشان داده شده است. روش پیشنهادی را میتوان به عنوان روشی نتیجهگیری کرد که قوانین «اگر-پس» را بین جابجاییهای پل ورودی گذشته میآموزد و آنها را برای تولید و پیشبینی جابجاییهای آینده به خاطر میسپارد. علاوه بر این، مشخص شد که مدل ANFIS ابزار مناسب و کافی برای استفاده در پیشبینی تغییر شکل سازه است.
تجزیه و تحلیل داده های نظارت بر سلامت سازه نشان می دهد که پل Huangpu برای قضاوت از اجزای حرکتی مختلف، که اجزای ثابت و نیمه استاتیک بر اساس اندازه گیری RTK-GPS، به علاوه جزء دینامیکی بر اساس اندازه گیری های شتاب سنج هستند، ایمن است. اجزای جابجایی استاتیک و نیمه استاتیک نسبتاً کوچک هستند و اجزای فرکانس دینامیکی تقریباً در زمانهای مختلف نظارت ثابت هستند.
در نهایت، تحلیل عملکرد مدل پیشبینی طراحی نشان میدهد که باقیماندههای تابع همبستگی خودکار برای دادههای زمان بررسی در فاصله اطمینان 95 درصد برای تابع همبستگی خودکار قرار دارند و خطاهای آماری برای زمانهای بررسی کوچک هستند. این نتایج نشان میدهد که پل Huangpu در طول زمانهای پایش مطالعه ایمن است.







بدون نظر