

خلاصه
این مطالعه یک روش تطبیق لبه محلی با تکنیک تراز توالی برای مجموعه دادههای فضایی مجاور پیشنهاد میکند. با فرض اینکه لبه های مرزی مشترک مجموعه داده ها رشته های نقطه ای هستند، روش پیشنهادی دنباله ای را برای عملیات ویرایش نقطه به دست می آورد تا لبه ها را با استفاده از الگوریتم تطبیق رشته با عملیات زیر تراز کند: (1) گیر دادن دو نقطه از هر رشته به آنها. موقعیت متوسط، (2) حذف یک نقطه از یک رشته و (3) حذف یک نقطه از رشته دیگر. هزینه های این عملیات از تغییر شکل بخش های خط درگیر از نظر تغییر زاویه و طول به دست می آید. سپس جفتهای نقطهای متناظر، جفتهای نقطهای در نظر گرفته میشوند که عملیات snapping برای آنها به ترتیب انتخاب میشود. بر اساس این جفت ها،
کلید واژه ها:
تطبیق لبه ; مجموعه داده فضایی مجاور ; جفت نقطه مربوطه ; هم ترازی توالی ; تطبیق رشته
1. معرفی
تطبیق لبه بین مجموعه داده های فضایی مجاور، تفاوت های هندسی لبه های مرزی مشترک بین مجموعه داده های فضایی مجاور را پیدا کرده و حذف می کند [ 1 ، 2 ، 3 ، 4 ]. در این کار دو جزء وجود دارد: تطبیق ویژگی برای شناسایی نقطه یا جفت لبه مربوطه و تراز نقشه برای حذف تفاوت در جفت های شناسایی شده.
از آنجایی که تراز نقشه با جفت نقاط مربوطه انجام می شود، تطبیق ویژگی نقطه به طور کلی در زمینه اطلاعات مکانی استفاده می شود. به همین دلیل، روش های تطبیق نقاط متنوعی پیشنهاد شده است. Beard و Chrisman الگوریتم Zipper را پیشنهاد کردند که نزدیکترین جفتهای نقطه را در آستانه فاصله پیدا میکند و تعیین میکند که این جفتها جفتهای نقطه متناظر هستند [ 1 ]. این الگوریتم ساده و کارآمد است. بنابراین، در بسیاری از مطالعات [ 2 ، 3 ، 4 ، 5] پذیرفته شده است]. با این حال، یکی از مشکلات این الگوریتم در تخمین آستانه مناسب نهفته است زیرا حتی اگر آستانه به دقت موقعیتی مجموعه دادههای فضایی درگیر مرتبط است، مشخص نیست که چگونه دقتها به مقدار آستانه ترجمه میشوند [6 ] . برای رسیدگی به این مشکل، تجزیه و تحلیل آماری از جفت نقطه متناظر نمونه در داده های آموزشی استفاده شد. لولونیس [ 4 ] تجزیه و تحلیل کای اسکوئر را بر روی تفاوت های موقعیتی جفت نقطه متناظر نامزد پیشنهاد کرد و سپس جفت های نامتناسب را با توجه به سطح اطمینان آماری متمایز کرد. ماسویاما [ 5 ] آستانه را با تجزیه و تحلیل مبتنی بر شبیه سازی مونت کارلو از جفت های نمونه گیری تعیین کرد. هوه و همکاران [ 7] از تجزیه و تحلیل باکس پلات روی جفتهای نمونهگیری شده استفاده کرد، زیرا آنالیز میتواند مقادیر مناسب و پرت را در جفتهای نمونهبرداری شده بدون هیچ فرضی در مورد توزیع آماری اساسی تشخیص دهد. در همین حال، روشهای تراز نقشه بدون تطابق ویژگی فوق اخیراً پیشنهاد شدهاند [ 6 ، 8 ]. آنها تفاوت های هندسی مجموعه داده های فضایی مجاور را به صورت شکاف ها و همپوشانی ها نشان می دهند. شکاف ها و همپوشانی ها به ترتیب نشان دهنده مناطق اشتباهی هستند که در آن هیچ پوشش داده مکانی وجود ندارد و در آن پوشش از مجموعه داده های مختلف به طور همزمان وجود دارد. این نواحی با استفاده از تکنیکهای هندسه محاسباتی مانند روش مثلثسازی دلونای محدود به مثلثها تجزیه میشوند. سپس، هر یک از مثلث ها [ 6 ] یا بخش هایی از هر یک از مثلث ها را تقسیم کرد [6]8 ] به یکی از مجموعه داده های فضایی اختصاص داده می شود و لبه های مرز مشترک بدون درز بدون شکاف و همپوشانی به دست می آید.
اگرچه مطالعات فوق نتایج موفقیتآمیزی ارائه کردهاند، بهبودهای بیشتری در تطبیق ویژگیها برای رسیدگی به تفاوتهای موقعیتی همبستگی خودکار محلی لازم است. در زمینه اختلاط نقشه، که جفتهای نقطه متناظر یا اشیاء متناظر را بین مجموعه دادههای فضایی فوق تحمیلی پیدا میکند، یک مدل تبدیل مانند یک مدل تبدیل وابسته یا صلب برای توضیح تفاوتهای موقعیتی همبسته خودکار اعمال میشود. این نوع تفاوت ها همچنین در تطبیق لبه ها به عنوان مناطق فرعی در شکل 1 به وجود می آیند . با در نظر گرفتن تفاوت جهت افقی جفت نقطه متناظر در ناحیه فرعی 1, (a (1) , b (1) , (a (2) , b (2) ), (a)(3) , b (3) ) و (a (4) , b (4) ) جفت نقطه متناظر مناسبی هستند. با این حال، (a (3) ، b (2) ) و (a (5) ، b (4) ) نزدیکترین جفتها هستند و بنابراین زمانی که یک روش تطبیق کلی اعمال میشود، برای جفتهای نقطه متناظر انتخاب میشوند. در همین حال، تفاوتهای جهت عمودی برای جفتهای نقطه متناظر در ناحیه زیر مرزی 3 وجود دارد. وقتی مناطق فرعی زیادی وجود دارد که جهتهای اختلاف موقعیت آنها متمایز است، این تفاوتها را نمیتوان با یک مدل تبدیل منفرد توضیح داد.
علاوه بر این، این مشکل زمانی میتواند شدیدتر باشد که بسیاری از اشیاء جاده یا رودخانه وجود داشته باشند که توسط مرزهای مجموعه دادههای فضایی مجاور تقسیم شدهاند و تا حدی در هر مجموعه داده نشان داده میشوند. هنگامی که دو مجموعه داده توسط یک آژانس نقشه برداری با قانون نگاشت یکسان ساخته می شوند، اشیاء فضایی تقسیم شده دارای ویژگی های یکسانی هستند، از جمله نام یا کد شناسایی. در این حالت ابتدا این اشیا پیدا می شوند و سپس جفت نقطه متناظر هر جفت شی متناظر به راحتی پیدا می شود. هنگامی که دو مجموعه داده توسط یک آژانس نقشه برداری با قانون نگاشت یکسان ساخته نمی شوند، فقط ویژگی های هندسی مانند فاصله یا شکل برای یافتن جفت نقطه متناظر در دسترس هستند. با این حال، تطبیق ویژگی با این ویژگیهای هندسی در برابر مشکل فوقالذکر آسیبپذیر استشکل 1 . علاوه بر این، این مشکل را نمی توان با یک مدل تبدیل پرداخت زیرا طول منطقه مرزی اغلب بیش از چندین کیلومتر است و یک مدل ساده نمی تواند تفاوت های متمایز محلی را توضیح دهد.
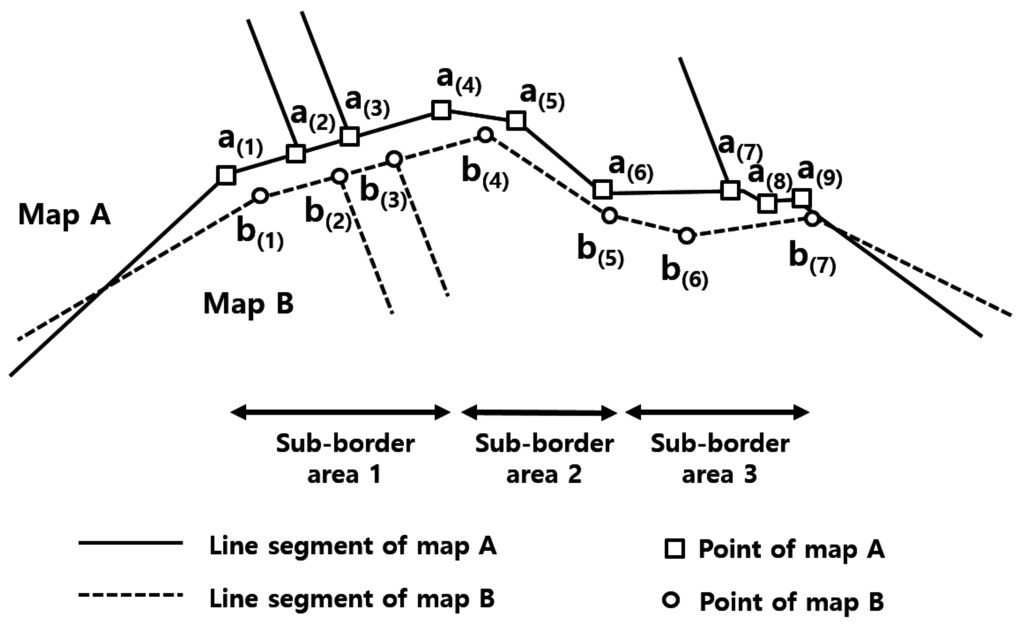
شکل 1. تفاوت های موقعیتی بین مجموعه داده های فضایی مجاور.
برای پرداختن به این مشکل، این مطالعه یک روش تطبیق لبه محلی با تراز توالی با استفاده از یک الگوریتم تطبیق رشته پیشنهاد میکند. با فرض اینکه لبههای مرزی دو نقشه مجاور رشتههای نقطهای هستند، روش پیشنهادی دنبالهای را برای عملیات ویرایش نقطهای بهدست میآورد تا لبهها را با استفاده از عملیات زیر تراز کند: (1) دو نقطه از هر رشته به موقعیت متوسط آنها، ( 2) حذف یک نقطه از یک رشته و (3) حذف یک نقطه از رشته دیگر. هزینه های این عملیات از تغییر شکل بخش های خط درگیر از نظر تغییر زاویه و طول به دست می آید. دنباله عملیات بهینه با حداقل هزینه کل با استفاده از تکنیک بهینه سازی برنامه نویسی پویا به دست می آید [ 9 ، 10]]. سپس جفتهای نقطهای متناظر، جفتهای نقطهای در نظر گرفته میشوند که عملیات snapping برای آنها به ترتیب انتخاب میشود. بر اساس این جفت ها، یک ناحیه مرزی از مجموعه داده های فضایی مجاور را می توان به مناطق فرعی تقسیم کرد که در آن فرآیندهای تطبیق و هم ترازی متمایز انجام می شود.
ساختار باقی مانده مقاله به شرح زیر است. در بخش بعدی جزئیات روش پیشنهادی ارائه شده است. در بخش 3 ، نتایج روش پیشنهادی ارزیابی و مورد بحث قرار می گیرد. روش پیشنهادی برای دو نقشه کاداستر مقامات محلی همسایه اعمال می شود. نتیجه روش پیشنهادی با جفت نقطه متناظر انتخابی دستی و با روش آستانه فاصله معمولی مقایسه میشود. در نهایت، نتیجه در بخش 4 آورده شده است .
2. روش پیشنهادی
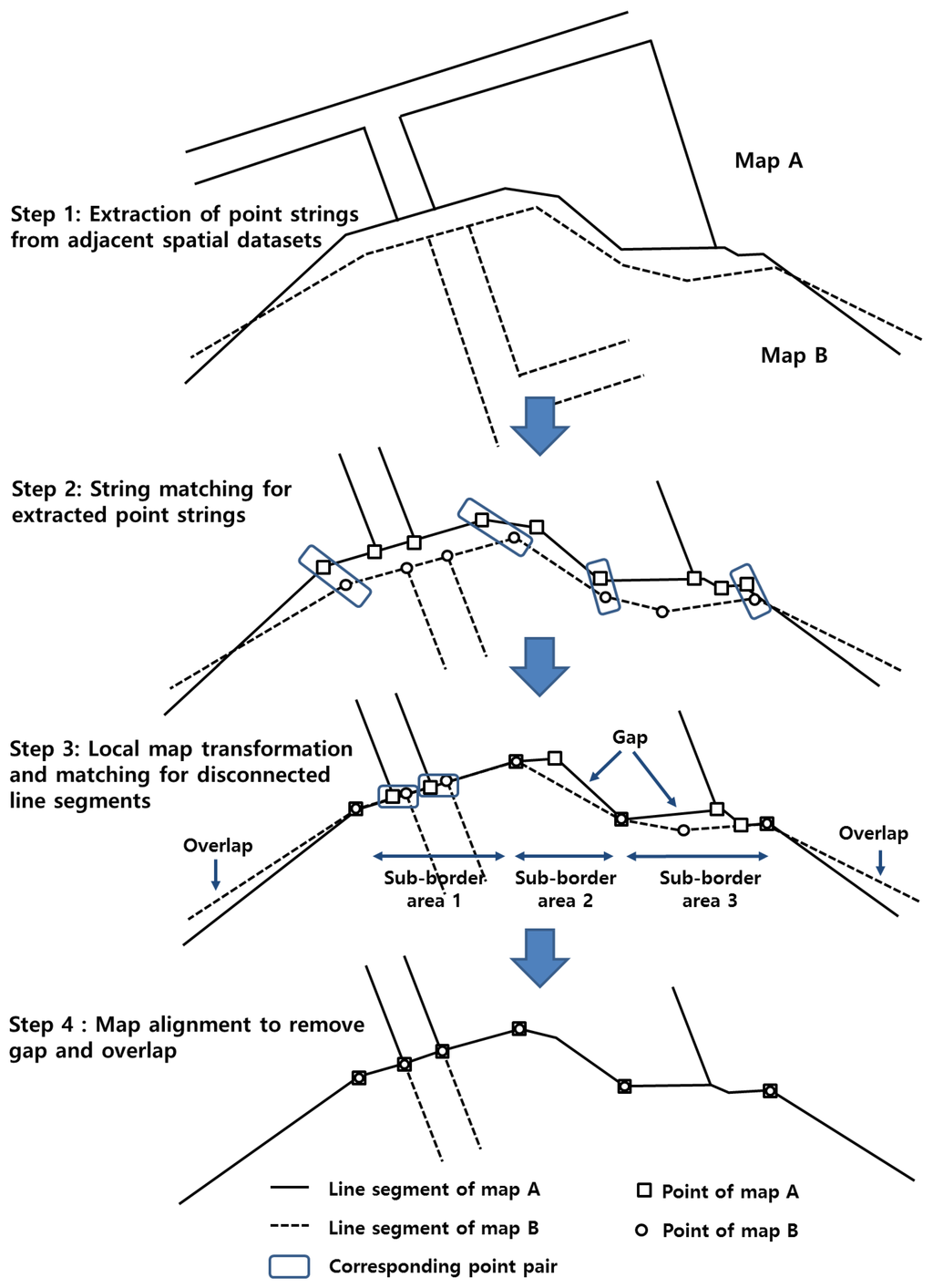
روش پیشنهادی شامل چهار مرحله است: مرحله 1. استخراج رشته های نقطه ای از مجموعه داده های فضایی مجاور، مرحله 2. تطبیق رشته برای رشته های نقطه استخراج شده، مرحله 3. تبدیل نقشه محلی و تطبیق برای بخش های خط جدا شده و مرحله 4. تراز کردن نقشه های محلی به همانطور که در شکل 2 نشان داده شده است، شکاف ها و همپوشانی ها را حذف کنید . جزئیات این روش به شرح زیر است.

شکل 2. گردش کار روش پیشنهادی.
2.1. استخراج رشته های نقطه ای از مجموعه داده های فضایی مجاور
این مرحله یک مرحله پیش پردازش برای استخراج رشته های نقطه مرزی از مجموعه داده های فضایی است. از نظر فنی، دستکاری داده های مختلف با توجه به نوع داده مجموعه داده های فضایی درگیر ضروری است. در این تحقیق دو فرض در مورد مجموعه داده های مکانی وجود دارد. فرض اول این است که این مجموعه داده ها توسط آژانس های نقشه برداری فقط برای مناطق حوضه آبریز خود ساخته و نگهداری می شوند، به طوری که مرزهای مجموعه داده ها پس از تطبیق لبه ها، یک مجموعه داده فضایی یکپارچه را ارائه می دهند. فرض دیگر این است که مجموعه داده ها از اشیاء چند ضلعی تشکیل شده اند که متقابلاً منحصر به فرد و در مجموع جامع هستند، مانند نقشه کاداستر.
در حال حاضر، لازم است یک ناحیه مرزی تعریف شود که رشتههای نقطهای که باید مطابق و تراز شوند استخراج میشوند. این ناحیه به عنوان یک ناحیه اتحادیه از مرزهای بافر برای دو مجموعه داده فضایی به دست می آید ( شکل 3 ج). با فاصله بافر تیساعت�ℎ، مرزهای هر مجموعه داده فضایی گسترش یافته است ( شکل 3 a,b) و تمام بخش های خط و نقاط برای این مجموعه داده ها در منطقه اتحادیه استخراج می شوند. سپس، بخش های خطی که برای لبه های مرزی هر مجموعه داده نیستند، به دلیل مفروضات فوق الذکر به عنوان جفت های تکراری به دست می آیند ( شکل 3 د). این بخشهای تکراری حذف میشوند و بخشهای خط باقیمانده به چند خطوط متصل میشوند که بهصورت رشتههای نقطهای نشان داده میشوند ( شکل 3 e). بعداً، این بخشهای خط حذف شده متصل به این رشتههای نقطهای برای تطبیق بخشهای خط جداشده در مرحله 3 استفاده میشوند.

شکل 3. استخراج رشته های نقطه ای از مجموعه داده های فضایی مجاور. a _ _ _ _ _ _ _ _ _ ) رشته هایی که باید تراز شوند.
مشخص کردن ترتیب رشته های نقطه قابل توجه است. به طور کلی، ترتیب نقطه یک چند ضلعی ساده خلاف جهت عقربه های ساعت است. به طور مشابه، نقاط پایانی برای هر رشته نقطه به طور موقت به هم متصل می شوند و سپس ترتیبات در خلاف جهت عقربه های ساعت تعیین می شوند.
2.2. تطبیق رشته برای رشته های نقطه استخراج شده
2.2.1. تابع هزینه
روش پیشنهادی از سه نوع عملیات ویرایش نقطه استفاده می کند. عملیات قفل کردن o (آ( من )،ب( j )→ v )�(�(�),�(�)→�)دو نقطه، یکی از هر رشته، را به موقعیت متوسط آنها منتقل می کند v�همانطور که در شکل 4 الف نشان داده شده است. عملیات حذف o (آ( من )← ϕ )�(�(�)→�)یا o (ب( j )← ϕ )�(�(�)→�)همانطور که در شکل 4 ب نشان داده شده است، یک نقطه از یک رشته را حذف می کند . از آنجایی که عملیات حذف نقاط مرزها را حذف می کند، فقط جفت نقطه برای عملیات snapping باقی می ماند و برای عملیات ویرایش بعدی استفاده می شود. بدین ترتیب، پ�نقطه میانگین موقعیت دو نقطه برای آخرین عملیات چفت شدن است.

شکل 4. توابع هزینه تطبیق رشته در این مطالعه. ( الف ) عملیات بستن، ( ب ) عملیات حذف.
این عملیات با جابجایی یا حذف نقاط درگیر، شکل لبه های مرزی را تغییر می دهد. مطالعاتی برای تراز کردن مرزها برای جفت اشیاء مربوطه با عملیات ویرایش نقطه انجام شده است [ 7 ، 11 ، 12 ، 13 ]. این مطالعات توابع هزینه های مختلفی را به صورت کمی برای اندازه گیری تغییر شکل با یافتن دنباله عملیات ویرایش نقطه بهینه با حداقل هزینه کل پیشنهاد کردند. از میان توابع هزینه، مدل انرژی تغییر شکل [ 7 ] را انتخاب می کنیم. این تغییر را بر حسب انرژی کشش و خمش، همانطور که در رابطه (1) بیان شده است، اندازه گیری می کند.
E = Es t r e t c h i n g + Eb e n dمن n g = λ ( Δ l )2 + ( 1 – λ ) ( Δ θ )2� = �������ℎ��� + �������� = �(Δ�)2 + (1−�)(Δ�)2
اینجا، Δ lΔ�و Δ θΔ�به ترتیب اختلاف طول و زاویه ناشی از یک عملیات هستند و λ ( 0 ≤ λ ≤ 1 )λ(0≤λ≤1)ضریبی برای خلاصه وزنی انرژی کشش و خمش است.
در شکل 4 الف، عملیات چفت شدن o (آ( من )،ب( j )→ v )�(�(�),�(�)→�)طول و زوایای چهار پاره خط مرزی را تغییر می دهد. بنابراین، طبق رابطه 1، هزینه عملیات بندکشی توسط رابطه (2) تعیین می شود.
ج (آ( من )،ب( j )→ v ) =λ { (لp , a ( i ) – لp ، v)2 + (لa ( i ) ، a ( i + 1 ) – لv , a ( i + 1 ))2 + (لp , b ( j ) – لp ، v)2 + (لb ( j ) ، b ( j + 1 ) – لv , b ( j + 1 ))2} + ( 1 − λ ) { θپ2 + θa ( i + 1 )2 + θp _ 2 + θb ( j + 1 )2}�(�(�),�(�)→�) = � { (��,�(�) − ��,�)2 + (��(�),�(�+1) − ��,�(�+1))2 + (��,�(�) − ��,�)2 + (��(�),�(�+1) − ��,�(�+1))2} + (1−�) { ��2 + ��(�+1)2 + �� ’2 + ��(�+1)2}
در این معادله، لx ، y��,�طول (متر) پاره خط مرزی بین نقاط است ایکس�و y�. θایکس��تغییر زاویه (درجه) در نقطه است ایکس�بعد از یک عمل
در شکل 4 ب، عملیات حذف o (آ( من )← ϕ )�(�(�)→�)طول و زوایای دو پاره خط از یک مرز را تغییر می دهد. بنابراین، هزینه عملیات حذف به صورت معادله (3) فرموله می شود.
ج (آ( من )→ ϕ ) =2λ { (لp , a ( i ) + لa ( i ) ، a ( i + 1 ) – لp , a ( i + 1 )2)2} + ( 1 − λ ) { θپ2 + θa ( i + 1 )2}�(�(�)→�) = 2 � { (��,�(�) + ��(�),�(�+1) − ��,�(�+1)2)2} + (1−�) {��2 + ��(�+1)2}
عملیات حذف دیگر o (ب( j )← ϕ )�(�(�)→�)به همین ترتیب فرموله شده است.
2.2.2. تطبیق رشته برای یافتن جفت نقاط مربوطه
با توجه به دو رشته نقطه A = [آ( 1 )،آ( 2 )، ⋯ ،آ( n )]�=[�(1),�(2),⋯,�(�)]و B = [ب( 1 )،ب( 2 )، ⋯ ،ب( متر )]�=[�(1),�(2),⋯,�(�)]که اندازه ها هستند n�و متر�به ترتیب، یک روش تطبیق رشته هزینه کل بین را محاسبه می کند آ�و ب�همانطور که در رابطه (4) توضیح داده شده است.
سی( A , B ) = حداقل { ∑Oج( من ) ∣∣ O = [ o( 1 )، o( 2 )، ⋯ ، o( ن)] }�(�,�) = min {∑��(�) | � = [�(1), �(2), ⋯ ,�(�)]}
اینجا، o( من )�(�)یکی از انواع عملیات ویرایش است و ج( من )�(�)هزینه است o( من )�(�). ن�تعداد کل عملیات ویرایش است. با توجه به دو رشته نقطه و توابع هزینه، دنباله بهینه O�با تکنیک برنامه نویسی پویا که در شکل 5 نشان داده شده است بر اساس ویژگی زیر معادله (5) [ 14 ] به دست می آید.
سی(آ< 1 ، i >، ب< 1 ، j >) = حداقل ⎧⎩⎨⎪⎪⎪⎪سی(آ< 1 , i − 1 >، ب< 1 , j − 1 >) +ج ( آ( من )،ب( j )→ v ∣∣ پ( i − 1 , j − 1 ) )سی(آ< 1 , i − 1 >، ب< 1 ، j > ) +ج ( آ( من )← ϕ ∣∣ پ( i − 1 , j ) )سی(آ< 1 ، i > ، ب< 1 , j − 1 >) +ج ( ب( j )← ϕ ∣∣ پ( i , j − 1 ) )⎫⎭⎬⎪⎪⎪⎪سی(آ<1،من>، ب<1،�>) = دقیقه {سی(آ<1،من–1>، ب<1،�–1>) + ج (آ(من)،ب(�)→� | پ(من–1،�–1))سی(آ<1،من–1>، ب<1،�> ) + ج (آ(من)→� | پ(من–1،�))سی(آ<1،من> ، ب<1،�–1>) + ج (ب(�)→� | پ(من،�–1))}
اینجا، آ⟨ 1 ، من ⟩= [آ( 1 )،آ( 2 )، ⋯ ،آ( من )]آ〈1،من〉=[آ(1)،آ(2)،⋯،آ(من)]و ب⟨ 1 ، j ⟩= [ب( 1 )،ب( 2 )، ⋯ ،ب( j )]ب〈1،�〉=[ب(1)،ب(2)،⋯،ب(�)]دو رشته نقطه جزئی از را نشان دهید آ( 1 )آ(1)به آ( من )آ(من)، و از ب( 1 )ب(1)به ب( j )ب(�)، به ترتیب. ج ( ∙ | p )ج(∙|پ)هزینه یک عملیات ویرایش نقطه را نشان می دهد که جفت نقطه آخرین عملیات snapping آن است پپ. همانطور که قبلا توضیح داده شد، توابع هزینه فوق به جفت نقطه برای آخرین عملیات snapping نیاز دارند. برای پشتیبانی از این اطلاعات هنگام محاسبه ج (آ⟨ 1 ، من ⟩،ب⟨ 1 ، j ⟩)سی(آ〈1،من〉،ب〈1،�〉)، ماتریس پپدر شکل 5 ساخته شده است . یک محدودیت فاصله برای عملیات snapping برای بهبود دقت تطبیق اضافه شده است. فاصله بین نقاط مربوطه کمتر از تیساعتتیساعت. این پارامتر همانند فاصله بافر در مرحله قبل است.
با این حال، جفت امتیاز برای عملیات ویرایش snapping را نمی توان مستقیماً از هزینه کل به دست آورد. آنها از یک ماتریس عملیات ویرایش به دست می آیند تیتی، جایی که تی( من ، ج )تی(من،�)آخرین عملیات ویرایش انتخاب شده را نشان می دهد ج (آ⟨ 1 ، من ⟩،ب⟨ 1 ، j ⟩)سی(آ〈1،من〉،ب〈1،�〉). از این ماتریس، دنباله ویرایش بهینه برای ج (آ⟨ 1 ، من ⟩،ب⟨ 1 ، j ⟩)سی(آ〈1،من〉،ب〈1،�〉)را می توان با استفاده از تجزیه و تحلیل پس زمینه از تی( من ، ج )تی(من،�). این عملیات ویرایش انتخاب شده قبلی را در میان می یابد (آ( من )← ϕ )(آ(من)→�)از جانب تی( i − 1 , j )تی(من–1،�)، o (ب( j )← ϕ )�(ب(�)→�)از جانب تی( i , j − 1 )تی(من،�–1)و o (آ( من )،ب( j )→ v )�(آ(من)،ب(�)→�)از جانب تی( i − 1 , j − 1 )تی(من–1،�–1)[ 7 ]. بنابراین، با شروع از تی( n , m )تی(�،متر)، دنباله عملیات ویرایش نقطه به تی( 0 , 0 )تی(0،0)ردیابی می شود و جفت نقطه متناظر به عنوان جفت هایی که عملیات چفت شدن برای آنها انتخاب شده اند به دست می آید.

شکل 5. کد شبه برای تطبیق رشته در این مطالعه.
2.3. تبدیل نقشه محلی و تطبیق برای بخش های خط جدا شده
رشتههای نقطهای استخراجشده در مرحله 1 به رشتههای نقطه فرعی تقسیم میشوند و به صورت محلی با یک تبدیل صلب مطابق با موقعیت میانگین نقاط متناظر همانطور که در شکل 6 نشان داده شده است، تراز میشوند . اگرچه تطبیق رشته در این مطالعه بیشتر جفتهای نقطه متناظر را بین مرزهای مشترک مجموعه دادههای فضایی مجاور پیدا میکند، اما همانطور که در شکل 6 نشان داده شده است، برای نقاط قطعات خطوط جداشده به خوبی کار نمیکند.آ. این به این دلیل است که تطبیق رشته در این مطالعه دنباله ویرایش را جستجو می کند تا دو رشته نقطه را با حداقل هزینه تراز کند. به طور کلی، نقاط روی قطعات خط جدا شده به بخشهای تقریباً مستقیم برخورد میکنند و عملیات حذف آنها اغلب باعث تغییر شکل کمتری در مقایسه با عملیات گیرکردن آنها میشود. بنابراین، اغلب جفتهای نقطهای مربوط به بخشهای خط قطع را از دست میدهد. برای حل این مشکل، نزدیکترین نقطه متقابل در یک فاصله تلورانس جفت می شود تی ول _تی�لهمانطور که در شکل 6 الف نشان داده شده است در پس پردازش نیز انتخاب می شوند . در همین حال، هیچ جفت نقطه ای در داخل وجود ندارد تی ول _تی�لدر شکل 6 b,c.

شکل 6. تبدیل نقشه محلی جفت رشته زیر نقطه مربوطه. ( الف ) دو جفت نقطه متناظر پس از تبدیل یافت میشوند، ( ب، ج ) هیچ جفت نقطه متناظری اضافی یافت نمیشود و پس از تبدیل ناسازگاریهای فضایی باقی میماند.
2.4. تراز نقشه برای حذف شکاف و همپوشانی
پس از تبدیل نقشه فوق، سه نوع تفاوت هندسی وجود دارد: اختلاف خطی ( شکل 7 الف)، اختلاف مثلث ( شکل 7 ب) و اختلاف چند ضلعی ( شکل 7 ج). تفاوت خطی موردی است که هر نقطه برای رشتههای نقطه فرعی دارای نقاط متناظر خاص خود است، به طوری که گیرکردن این جفتهای نقطه به موقعیتهای متوسطشان، تفاوتهای هندسی آنها را حذف میکند. تفاوت مثلث حالتی است که یک رشته زیر نقطه یک پاره خط و دیگری چند خط با دو پاره خط باشد. در این حالت، یک لبه مرزی تراز شده با اتصال نقاط متناظر منقطع از طریق مرکز مثلث به دست می آید.

شکل 7. روش تراز نقشه برای مورد اختلاف هندسی در این مطالعه. ( الف ) اختلاف خطی، ( ب ) اختلاف مثلث و ( ج ) اختلاف چند ضلعی.
تفاوت چند ضلعی در مقایسه با دو مورد فوق یک مشکل پیچیده است. در تجزیه و تحلیل شکل، این تفاوت به عنوان یک مسئله اسکلت مورد مطالعه قرار می گیرد که یک نسخه نازک از شکلی را پیدا می کند که فاصله یکسانی با مرزهای آن دارد. در میان روشهای اسکلت، یک روش مثلثسازی دلونی محدود (CDT) برای به دست آوردن یک لبه مرزی تراز استفاده میشود. CDT تعمیم مثلث Delaunay است که پاره های خط خاصی را به لبه های مثلث بندی مجبور می کند. در این مطالعه، محدودیت فوق بر روی قطعات خط لبه مرزی تبدیل شده اعمال می شود. سپس، یک لبه مرزی تراز شده با اتصال نقاط متناظر منقطع از طریق نقاط میانی دو لبه داخلی هر مثلث به دست میآید. جزئیات این CDT در [ 15 ] توضیح داده شده است.
گاهی اوقات، رشته های زیر نقطه متناظر تبدیل شده مطابق شکل 8 قطع می شوند . در این حالت، این رشته ها بر اساس نقاط تقاطع تقسیم می شوند و روش تراز نقشه فوق برای هر بخش با فرض اینکه این نقاط تقاطع نقاط متناظر با هم چفت می شوند، اعمال می شود.

شکل 8. اختلاف چند ضلعی با نقاط تقاطع یک جفت رشته فرعی تبدیل شده.
3. آزمایش و بحث
3.1. مجموعه داده و تعیین پارامتر
همانطور که در شکل 9 نشان داده شده است، روش پیشنهادی را برای دو نقشه کاداستر مجاور اعمال کردیم . نقشه A نقشه کاداستر ناحیه Geum-Cheon در شهر سئول است و نقشه B نقشه کاداستر شهر Gwang-Myeong در استان Gyeong-gi است. طول منطقه مرزی تقریباً 10 کیلومتر است. از آنجایی که این نقشهها با پیوستن به نقشههای بسته میراث مربوطه ایجاد میشوند و بهطور مستقل توسط مقامات محلی نگهداری میشوند، اختلافات موقعیتی نامنظم بین لبههای مرزی نقشهها ایجاد میشود.
روش پیشنهادی دارای سه پارامتر است: تیساعتتیساعت، λ�و تی ول _تی�ل. در میان آنها، تیساعتتیساعتبا تجزیه و تحلیل آماری 351 جفت نقطه متناظر در ناحیه تمرین شکل 9 تعیین می شود . برای تعیین از روش boxplot [ 16 ] استفاده می کنیمتیساعتتیساعتزیرا آستانه باید حد بالایی امکان پذیر از طول برای جفت نقطه مربوطه باشد. این روش با یافتن میانه داده های آموزشی و سپس انجام همین کار برای هر یک از نیمه ها آغاز می شود. این چارک های بالایی و پایینی جعبه مرکزی را مشخص می کنند و اغلب به عنوان لولای بالایی نامیده می شوند. Uاچ�اچ) و لولا پایینی ( L H�اچ)، به ترتیب. حصار داخلی بالایی ( Uمناف�مناف) به عنوان حصار بالایی جعبه تعریف می شود که 1.5 برابر طول جعبه به سمت حداکثر کشیده می شود و سبیل بالایی ( Uدبلیو�دبلیو) به عنوان دورترین مشاهده در داخل تعریف می شود Uمناف�مناف، همانطور که به ترتیب با معادلات (6) و (7) بیان می شود و همانطور که برای تیساعتتیساعت. Uدبلیو�دبلیواستفاده شده برای تیساعتتیساعتو دارای مقدار 8.89 متر است که از جفت های داده های آموزشی محاسبه شده است، همانطور که در شکل 10 نشان داده شده است .
Uمناف = U اچ + 1.5 ⋅ ( U اچ – L H )�مناف = �اچ + 1.5 ⋅ (�اچ – �اچ)
Uدبلیو = حداکثر ( x | x < U مناف)�دبلیو = حداکثر (ایکس | ایکس < �مناف)

شکل 9. دو نقشه کاداستر مجاور (نقشه A و نقشه B) برای آزمایشات.

شکل 10. تجزیه و تحلیل هیستوگرام و باکس پلات از جفت نقطه متناظر انتخاب شده به صورت دستی.
در همین حال، پارامترهای باقی مانده λ�و تی ول _تی�لنمی توان مستقیماً با این تحلیل آموزش داد. بدین ترتیب مقادیر مختلف پارامترها ارزیابی شده و سپس پارامترهای بهینه با بالاترین سطح دقت تطبیق به دست میآیند. ما از سه نوع اندازه گیری برای دقت استفاده کردیم: دقت، فراخوانی و اندازه گیری F. دقت به نسبت جفت های به درستی یافت شده به تعداد کل جفت های یافت شده اشاره دارد و یادآوری نشان دهنده نسبت جفت های به درستی یافت شده به تعداد کل جفت های صحیح است. اندازه گیری F با رابطه (8) تعریف می شود. در این معادله، پپو آرآربه ترتیب دقت و یادآوری را نشان می دهند.
اف– مe a s u r e = 2 ⋅ P⋅ آرپ+ آراف–مهآستو�ه = 2⋅پ⋅آرپ+آر
ما 21 نامزد را درخواست کردیم λ�s از 0 تا 1 با فواصل 0.05 و پنج نامزد تی ول _تی�لs از 1 متر تا 9 متر با فواصل 2 متر. بیشترین دقت (924/0) زمانی به دست آمد که λ�و تی ول _تی�لهمانطور که در شکل 11 الف نشان داده شده است، به ترتیب 0.95 و 5 متر بودند . همچنین بیشترین میزان یادآوری (887/0) زمانی به دست آمد λ�و تی ول _تی�لهمانطور که در شکل 11 ب نشان داده شده است، به ترتیب 0.25 و 7 متر بودند . مطابق با λ�، دقت و یادآوری یک رابطه مبادله ای را نشان داد. چه زمانی λ�افزایش یافت و به یک نزدیکتر شد، درجه دقت افزایش یافت. در ضمن وقتی λ�کاهش یافت و به صفر نزدیک شد، درجه یادآوری افزایش یافت. بدین ترتیب، λ�به عنوان آستانه تطبیقی برای روش پیشنهادی عمل می کند. به طور کلی، یک آستانه تنگ تر تعداد کمتری از جفت های تطبیق را با دقت بالاتر و یادآوری کمتر نشان می دهد، در حالی که آستانه آزادتر تعداد بیشتری از جفت های تطبیق را با دقت کمتر و یادآوری بالاتر نشان می دهد. در این مطالعه، روش پیشنهادی از عملیات snapping و removing استفاده میکند. علاوه بر این، یکی از عملیاتی که حداقل هزینه کل را ارائه می دهد برای یک نقطه مشخص انتخاب می شود. بر این اساس، یک نتیجه تطبیق با دقت بالا و یادآوری کم با توجه به بزرگ λ�نشان دهنده افزایش هزینه عملیات بندکشی است. در همین حال، یک نتیجه تطبیق با دقت کم و فراخوان بالا با توجه به کوچک λ�نشان دهنده کاهش هزینه عملیات قیچی است. در مقایسه با λ�، تی ول _تی�لتأثیر معناداری بر عملکرد تطبیق ندارد. در نتیجه بیشترین میزان F (902/0) زمانی به دست آمد λ�و تی ول _تی�لهمانطور که در شکل 11 ج نشان داده شده است به ترتیب 0.25 و 5 متر بودند .

شکل 11. ارزیابی دقت روش پیشنهادی با توجه به دو پارامتر λ�و t o_تی�ل: ( الف ) دقت، ( ب ) یادآوری و ( ج ) اندازه گیری F.
3.2. نتیجه و بحث
برای مقایسه عملکرد و یافتن جفتهای نقطه متناظر برای تطبیق لبه، ارزیابی آماری روش پیشنهادی و روش آستانه فاصله در منطقه آزمایش انجام میشود. همانطور که در جدول 1 نشان داده شده است ، مقادیر دقت، فراخوان و اندازه گیری F روش آستانه فاصله با Thاز 8.89 متر به ترتیب 0.761، 0.927 و 0.835 بود. در همین حال، روش پیشنهادی با پارامترهای تعیین شده در بخش قبل، دقت و مقادیر F-measure بالاتری را نشان داد. با این حال، آنها همچنین ارزش یادآوری کمتری را نشان دادند. این یافتهها نشان میدهد که روش پیشنهادی معیار تطبیق دقیقتری دارد و نتیجه تطبیق کلی روش پیشنهادی از روش آستانه فاصله معمولی از نظر اندازهگیریهای F بهتر بود.

جدول 1. ارزیابی آماری روش پیشنهادی و یک روش آستانه فاصله در منطقه آزمایش در شکل 9 .
دقت بالاتری برای روش پیشنهادی بهویژه از نقاط روی بخشهای خط جدا شده به دست آمد، همانطور که در شکل 12 b,c نشان داده شده است. هنگامی که فواصل بین این نقاط در مقایسه با اختلاف موقعیت بین نقشه های مجاور کافی باشد، همانطور که در شکل 12 الف نشان داده شده است، دو روش تقریباً نتایج یکسانی را ارائه کردند. با این حال، فواصل برای جفتهای نقطه اشتباه تصادفاً کوتاهتر از جفتهای نقطه واقعی است، همانطور که در شکل 12 ب نشان داده شده است، که نشان میدهد روش آستانه فاصله نسبت به این مشکل آسیبپذیر بوده و نتیجه نادرستی با دقت پایین ارائه میدهد. این مشکل برای نقاطی در بخش های خط موازی قطع شده که جاده ها را همانطور که در شکل 12 نشان داده شده است، شدیدتر کرد.ج. گهگاه عرض این جاده ها در مقایسه با اختلاف موقعیتی بین نقشه ها کافی نیست. بنابراین، بسیاری از جفتهای نقطه اشتباه را میتوان با روش آستانه فاصله بهدست آورد، زیرا نزدیکترین نقاط به سادگی برای جفتها بدون در نظر گرفتن اختلافهای موقعیتی همبسته خودکار همسایه انتخاب میشوند. در همین حال، روش پیشنهادی یک فرآیند تطبیق را با در نظر گرفتن این اختلافات انجام می دهد. از این رو، عملکرد تطبیقی بهبود یافته را از نظر دقت ارائه می دهد. شکل 13 نتیجه تراز نقشه با این جفت نقطه متناظر است.
در مقایسه با درجه دقت بالاتر، روش پیشنهادی یادآوری کمتری را ارائه کرد، همانطور که در جدول 1 نشان داده شده است . این به این دلیل رخ داد که تمایل دارد جفتهای نقطه متناظر را بین نقاط گوشه برجسته انتخاب کند تا آنهایی که در بخشهای تقریباً خط مستقیم، همانطور که در شکل 14 نشان داده شده است.آ. روش پیشنهادی جفتهای نقطهای متناظر را بهعنوان جفتهای نقطهای تعیین میکند که برای آنها عملیات snapping در دنبالهای بهینه انتخاب میشود که با آن دو رشته نقطه با حداقل هزینه کل تراز میشوند. به طور کلی، عملیات حذف یک نقطه گوشه برجسته باعث تغییر شکل قابل توجهی در بخشهای خط درگیر میشود که منجر به هزینه عملیات ویرایش بزرگتر از عملیات گیره میشود. این رابطه برای نقاطی که با قطعات تقریباً خط مستقیم به هم وصل شده اند مخالف است. بنابراین، همانطور که در شکل های قبلی نشان داده شده است، روش پیشنهادی به طور دقیق جفت نقطه متناظر را بین نواحی گوشه برجسته با درجه بالاتری از دقت یادآوری پیدا کرد. با این حال، به جز آن دسته از خطوط قطع شده، جفت نقطه متناظر بین نقاط متصل شده توسط بخش های تقریباً خط مستقیم به اندازه کافی یافت نشد زیرا انتخاب در حذف عملیات برای آنها هزینه کمتری دارد. این ویژگی از کشش یا کوچک شدن نامنظم مناطق مرزی همسایه، همانطور که در نشان داده شده است، جلوگیری می کندشکل 14 ب. روش پیشنهادی جفتهای نقطه متناظر را بین نواحی گوشه برجسته با اجازه دادن به ترازهای نقشه تدریجی در امتداد منطقه مرزی پیدا کرد. با این حال، هنگامی که همه نزدیکترین نقاط متقابل استفاده می شود، نتیجه هم ترازی نقشه به خودی خود می تواند ناگهانی باشد، که عملکرد کلی را کاهش می دهد. بر اساس مقایسههای فوق با جفتهای نقطه متناظر انتخابی دستی و ویژگی تطبیق، روش پیشنهادی نسبت به روشهای آستانه فاصله قبلی برتری دارد.

شکل 12. مقایسه جفت نقطه متناظر یافت شده با روش پیشنهادی و روش آستانه فاصله. ( الف ) هر دو روش جفتهای صحیح را پیدا میکنند، ( ب، ج ) روش پیشنهادی جفتهای صحیحی از بخشهای خط جدا شده را بین دو نقشه پیدا میکند در حالی که روشهای آستانه فاصله جفتهای اشتباه را پیدا میکنند.

شکل 13. تراز نقشه برای حذف شکاف و همپوشانی شکل 12 . ( الف ) نتیجه هم ترازی شکل 12 الف، ( ب ) نتیجه هم ترازی شکل 12 ب، ( ج ) نتیجه هم ترازی شکل 12 ج.
علاوه بر این، لازم است در مورد تأثیر ترتیب رشته نقطه بحث شود. در بخش 2.1 ، دستورات در خلاف جهت عقربه های ساعت تعیین شد. با این حال، با توجه به ترتیب مخالف یا جهت عقربه های ساعت، نتایج تطبیق برای جفت نقطه مربوطه می تواند متفاوت باشد. اگرچه هر دو نتایج تقریباً یکسان هستند، این موضوع در این مرحله قابل توضیح نیست و تحقیقات بیشتر ضروری است.

شکل 14. مقایسه جفت نقطه متناظر با روش پیشنهادی و روش آستانه فاصله برای پاره های خط مستقیم. ( الف ) روش پیشنهادی جفت نقطه متناظری را بین نقاط روی پارههای خط تقریباً مستقیم پیدا نمیکند، در حالی که روش آستانه فاصله جفتهای صحیح را پیدا میکند، (ب) روش آستانه فاصله جفتهای نقطه متناظر را پیدا میکند که منجر به کشش یا کوچک شدن نامنظم پس از تراز نقشه میشود. روش پیشنهادی چنین مشکلی ایجاد نمی کند.
4. نتیجه گیری
این مقاله روش جدیدی را برای یافتن جفتهای نقطه متناظر برای تطبیق لبه مرز مشترک بین مجموعه دادههای فضایی مجاور با استفاده از تکنیک تطبیق رشته با سه نوع عملیات ویرایش نقطه پیشنهاد میکند. این سه عملیات دو نقطه از رشتهها را به موقعیت متوسط خود بردند، یک نقطه از یک رشته را حذف کردند و یک نقطه از رشته دیگر را حذف کردند. برخلاف روشهای آستانه فاصله قبلی، روش پیشنهادی میتواند مغایرتهای موقعیتی همبستگی خودکار محلی را در نظر بگیرد زیرا انتخاب در عملیات ویرایش، هندسه بخشهای خط مرزی درگیر را تغییر میدهد، پس از آن هندسههای تغییر یافته بر هزینههای ویرایش نقاط باقیمانده تأثیر میگذارد. بنابراین، روش پیشنهادی عملکرد تطبیق بهبود یافتهای را در مقایسه با روش قبلی به ویژه برای اندازهگیری دقیق ارائه میکند. این نشان می دهد که روش پیشنهادی جفت نقطه متناظر قوی تری پیدا می کند. با این حال، جفتهای کمتری از جفتهای نقطه متناظر واقعی نسبت به روش قبلی پیدا کرد، زیرا با توجه به توابع هزینه پیشنهادی، هزینههای حذف نقاط متصل شده توسط بخشهای تقریباً خط مستقیم معمولاً کمتر از هزینههای شکستن نقاط است. به همین دلیل، روش پیشنهادی به دنبال یافتن جفتهای متناظر بین نقاط گوشه برجسته و نه بین نقاط متصل شده توسط بخشهای تقریباً خط مستقیم است. با این حال، این ویژگی با جلوگیری از کشش یا کوچک شدن نامنظم مرزهای همسایه منجر به هم ترازی تدریجی نقشه در امتداد منطقه مرزی می شود. در نتیجه، روش تطبیق لبه محلی پیشنهادی توانایی بهبود یافته ای را برای یافتن جفت نقطه متناظر برای مجموعه داده های فضایی مجاور بدون درز نشان داد. جفتهای کمتری از جفتهای نقطه متناظر واقعی نسبت به روش قبلی پیدا کرد، زیرا با توجه به توابع هزینه پیشنهادی، هزینههای حذف نقاط متصل شده توسط بخشهای تقریباً خط مستقیم به طور کلی کمتر از هزینههای شکستن نقاط است. به همین دلیل، روش پیشنهادی به دنبال یافتن جفتهای متناظر بین نقاط گوشه برجسته و نه بین نقاط متصل شده توسط بخشهای تقریباً خط مستقیم است. با این حال، این ویژگی با جلوگیری از کشش یا کوچک شدن نامنظم مرزهای همسایه منجر به هم ترازی تدریجی نقشه در امتداد منطقه مرزی می شود. در نتیجه، روش تطبیق لبه محلی پیشنهادی توانایی بهبود یافته ای را برای یافتن جفت نقطه متناظر برای مجموعه داده های فضایی مجاور بدون درز نشان داد. جفتهای کمتری از جفتهای نقطه متناظر واقعی نسبت به روش قبلی پیدا کرد، زیرا با توجه به توابع هزینه پیشنهادی، هزینههای حذف نقاط متصل شده توسط بخشهای تقریباً خط مستقیم به طور کلی کمتر از هزینههای شکستن نقاط است. به همین دلیل، روش پیشنهادی به دنبال یافتن جفتهای متناظر بین نقاط گوشه برجسته و نه بین نقاط متصل شده توسط بخشهای تقریباً خط مستقیم است. با این حال، این ویژگی با جلوگیری از کشش یا کوچک شدن نامنظم مرزهای همسایه منجر به هم ترازی تدریجی نقشه در امتداد منطقه مرزی می شود. در نتیجه، روش تطبیق لبه محلی پیشنهادی توانایی بهبود یافته ای را برای یافتن جفت نقطه متناظر برای مجموعه داده های فضایی مجاور بدون درز نشان داد. هزینههای حذف نقاط متصل به بخشهای تقریباً خط مستقیم معمولاً کمتر از هزینههای جدا کردن نقاط است. به همین دلیل، روش پیشنهادی به دنبال یافتن جفتهای متناظر بین نقاط گوشه برجسته و نه بین نقاط متصل شده توسط بخشهای تقریباً خط مستقیم است. با این حال، این ویژگی با جلوگیری از کشش یا کوچک شدن نامنظم مرزهای همسایه منجر به هم ترازی تدریجی نقشه در امتداد منطقه مرزی می شود. در نتیجه، روش تطبیق لبه محلی پیشنهادی توانایی بهبود یافته ای را برای یافتن جفت نقطه متناظر برای مجموعه داده های فضایی مجاور بدون درز نشان داد. هزینههای حذف نقاط متصل به بخشهای تقریباً خط مستقیم معمولاً کمتر از هزینههای جدا کردن نقاط است. به همین دلیل، روش پیشنهادی به دنبال یافتن جفتهای متناظر بین نقاط گوشه برجسته و نه بین نقاط متصل شده توسط بخشهای تقریباً خط مستقیم است. با این حال، این ویژگی با جلوگیری از کشش یا کوچک شدن نامنظم مرزهای همسایه منجر به هم ترازی تدریجی نقشه در امتداد منطقه مرزی می شود. در نتیجه، روش تطبیق لبه محلی پیشنهادی توانایی بهبود یافته ای را برای یافتن جفت نقطه متناظر برای مجموعه داده های فضایی مجاور بدون درز نشان داد. این ویژگی با جلوگیری از کشش یا کوچک شدن نامنظم مرزهای همسایه منجر به ترازهای تدریجی نقشه در امتداد منطقه مرزی می شود. در نتیجه، روش تطبیق لبه محلی پیشنهادی توانایی بهبود یافته ای را برای یافتن جفت نقطه متناظر برای مجموعه داده های فضایی مجاور بدون درز نشان داد. این ویژگی با جلوگیری از کشش یا کوچک شدن نامنظم مرزهای همسایه منجر به ترازهای تدریجی نقشه در امتداد منطقه مرزی می شود. در نتیجه، روش تطبیق لبه محلی پیشنهادی توانایی بهبود یافته ای را برای یافتن جفت نقطه متناظر برای مجموعه داده های فضایی مجاور بدون درز نشان داد.
منابع
- ریش، م. کریسمن، N. Zipper: یک رویکرد محلی برای تطبیق لبه. صبح. کارتوگر. 1988 ، 15 ، 163-172. [ Google Scholar ] [ CrossRef ]
- کورن، آی. Doytsher, Y. تطبیق لبه های کارتوگرافی: نگاشت مشکل به سمت یک راه حل مبتنی بر کامپیوتر. در مجموعه مقالات کنوانسیون سالانه ACSM 1998، بالتیمور، MD، ایالات متحده آمریکا، 28 فوریه تا 5 مارس 1998.
- گریگوری، آی. Ell, P. GIS تاریخی حساس به خطا: شناسایی خطاهای درونیابی منطقه ای در داده های سری زمانی. بین المللی جی. جئوگر. Inf. علمی 2006 ، 20 ، 135-152. [ Google Scholar ] [ CrossRef ]
- Lolonis، P. یک آمار مربع کای برای بررسی تطبیق لبه رضایت بخش نقشه ها و نمودارهایی که مناطق مجاور را به تصویر می کشند. در مجموعه مقالات کنگره بین المللی FIG XXII، واشنگتن، دی سی، ایالات متحده آمریکا، 19-26 آوریل 2002.
- ماسویاما، الف. روشهایی برای تشخیص تفاوتهای ظاهری بین مجموعههای فضایی در مقاطع زمانی مختلف. بین المللی جی. جئوگر. Inf. علمی 2006 ، 20 ، 633-648. [ Google Scholar ] [ CrossRef ]
- لدوکس، اچ. Ohori، K. چند ضلعی های تطبیق لبه با یک مثلث محدود. در مجموعه مقالات سمپوزیوم GIS Ostrava 2011، Ostrava، چک، 24-26 ژانویه 2011; صص 377-390.
- ها، ی. یو، ک. Heo, J. تشخیص جفت نقطه مزدوج برای تراز نقشه بین دو مجموعه داده چند ضلعی. محیط زیست سیستم شهری 2011 ، 35 ، 250-262. [ Google Scholar ] [ CrossRef ]
- چو، اس; پونیتان، ام. گیم، جی. هه، ی. الگوریتم برچسب گذاری مثلث برای پارتیشن بندی ویژگی ها با مرزهای ناسازگار. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 2533-2550. [ Google Scholar ]
- Kruskal, JB مروری بر مقایسه توالی: تابهای زمانی، ویرایش رشتهها و ماکرومولکولها. SIAM Rev. 1983 , 25 , 201-237. [ Google Scholar ] [ CrossRef ]
- کایگین، اس. Bulut، M. تشخیص شکل با استفاده از تطبیق رشته نسبت داده شده با رئوس چندضلعی به عنوان موارد اولیه. تشخیص الگو Lett. 2002 ، 23 ، 287-294. [ Google Scholar ] [ CrossRef ]
- مایتر، اچ. Wu, Y. بهبود برنامه نویسی پویا برای حل ثبت تصویر. تشخیص الگو 1987 ، 20 ، 443-462. [ Google Scholar ] [ CrossRef ]
- وانگ، سی. استفانیدیس، ا. کرویتورو، آ. آگوریس، ص. ثبت توالی تصویر با استفاده از ویژگی خطی نقشه. فتوگرام انجین. Remote Sens. 2008 ، 74 ، 25-38. [ Google Scholar ] [ CrossRef ]
- ها، ی. یانگ، اس. گا، سی. یو، ک. شی، W. روش تطبیق رشته مبتنی بر اطمینان بخش خط برای ترکیب نقشه. ISPRS J. Photogramm. Remote Sens. 2013 ، 78 ، 69-84. [ Google Scholar ] [ CrossRef ]
- بونک، اچ. Buhler, U. کاربردهای تطبیق تقریبی رشته با تشخیص شکل دوبعدی. تشخیص الگو 1993 ، 26 ، 1797-1812. [ Google Scholar ] [ CrossRef ]
- زو، جی جی. چانگ، اچ. یان، اچ. اسکلت سازی شکل با شناسایی تقارن های محلی گسسته. تشخیص الگو 2001 ، 34 ، 1895-1905. [ Google Scholar ] [ CrossRef ]
- ریمان، سی. فیلزموزر، پ. Garrett, RG زمینه و آستانه: مقایسه انتقادی روشهای تعیین. علمی کل محیط. 2005 ، 345 ، 1-16. [ Google Scholar ] [ CrossRef ] [ PubMed ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر