1. معرفی
کنده کاری های سنگی تجسم تاریخ مردم باستان و بخش مهمی از آثار فرهنگی، به ویژه مجسمه های سنگی بزرگ بودا و کتیبه های سنگی بر روی پرتگاه ها است [ 1 ]. در برخی از سنگتراشیها، طلا بر روی سطح پوشانده میشود تا جایگاه و تجمل آن را برجسته کند. به عنوان مثال، برخی از آثار سنگی بزرگ با روکش طلا در چین عبارتند از: بودای تونگنان و مجسمه هزار دستی بودیساتوا در چونگ کینگ. آنها با ورق طلا تزئین شده اند تا از پایه در برابر عوامل جوی (محو شدن، پوسته پوسته شدن، گچ شدن، آلودگی و غیره ) محافظت می کنند و حس اعتبار و رمز و راز را افزایش می دهند و در عین حال باعث تحسین مردم از طلا می شوند.
با این حال، سومین بررسی آثار فرهنگی در چین در پایان سال 2011 نشان داد که نزدیک به یک چهارم این آثار، به ویژه حجاریهای سنگی، در وضعیت نامناسبی قرار دارند. به عنوان مثال، یک بررسی در محل نشان داد که مجسمه هزار دست بودیساتوا در چونگ کینگ آسیب جدی دیده است و ورق طلا به دلیل شرایط جوی و عوامل دیگر از بین رفته است. این منجر به دو نوع آسیب شده است: (1) تغییرات یکپارچگی سطح (مانند افتادن، پیچ خوردگی و ترک خوردگی لایه لایه) و (2) تغییرات مورفولوژی سطح (مانند خم شدن و برآمدگی، همانطور که در شکل 1 نشان داده شده است) .). نگهداری ورق طلا دشوار، پیچیده است و به منابع زیادی نیاز دارد. به عنوان مثال، نگهداری مجسمه هزار دستی بودیساتوا در چونگ کینگ به 20 قدم، 6 سال و میلیون ها یوان رنمینبی چین (CNY) نیاز داشت. بنابراین، تشخیص و نگهداری به موقع آسیب ورق طلا در حکاکیهای سنگی با روکش طلا نه تنها هزینههای تعمیر را تا حد زیادی کاهش میدهد، بلکه از آسیب بیشتر توده سنگ داخلی نیز جلوگیری میکند.
حفاظت از کنده کاری های سنگی اواخر در چین آغاز شد. در ابتدا، تحقیقات در مورد بررسی خسارت عمدتاً در تلاش برای ثبت و خلاصه کردن انواع آسیب، توزیع، علل، شدت و غیره انجام شد . در برخی موارد، آسیب می تواند غیر سطحی باشد و آسیب بیشتر می تواند به راحتی با لمس سطح ایجاد شود. علاوه بر این، چنین روشهایی به تعهد کار زیادی نیز نیاز دارند [ 1 ]. از این رو، برخی از محققان اتخاذ روشی از فتوگرامتری فاصله نزدیک را برای تشخیص آسیب آثار سنگ پیشنهاد کرده اند [ 2 ، 3 ، 4]]. نمودارهای صفحه و ارتفاع تهیه شده با استفاده از فتوگرامتری فاصله نزدیک می توانند تا میلی متر دقیق باشند. با این حال، شرایط آب و هوایی، زاویه دید، و نور تاثیر قابل توجهی بر فتوگرامتری فاصله نزدیک دارند. علاوه بر این، تفسیر تصویر پیچیده است، و حتی اگر میتوان آسیبهایی را شناسایی کرد، دادههای تصویری چند زمانی برای انعکاس شرایط توسعه آسیب روی هم قرار نمیگیرند. در نتیجه این روش کاملاً مؤثر نیست.
ظهور فناوری اسکن لیزری سه بعدی راه جدیدی برای تشخیص آسیب در آثار سنگی ارائه کرده است. مهم ترین مزیت این فناوری، دستیابی مستقیم به داده های ابر نقطه سه بعدی متراکم است که می تواند جزئیات را بر روی سطح اشیاء شناسایی شده منعکس کند [ 5 ، 6 ]. در سالهای اخیر، چندین محقق با موفقیت از فناوری اسکن لیزری سه بعدی در نظارت و مطالعه سازهها، زمین لغزشها و نشستهای سطحی بهره بردهاند [ 7 ، 8 ، 9 ]. Girardeau-Montaut و همکاران. ابرهای نقطهای سهبعدی متضاد را در نقاط زمانی مختلف برای تشخیص تغییرات در کنده کاریهای سنگی پیشنهاد کرد و یک مشکل تغییر کاذب را در فرآیند تشخیص پیشنهاد کرد [ 10]. Wawrzyniec و همکاران به طور منظم شرایط صخره را با استفاده از فناوری اسکن لیزری سه بعدی مشاهده کرد و پیشنهاد کرد که تغییرات را می توان با دقت کمتر از سانتی متر از طریق کنتراست ابر نقطه ای تشخیص داد [ 11 ]. ژائو و همکاران دادههای ابر نقطهای را برای تشخیص تغییرات در دیوارهای ساختمان اتخاذ کرد. با مقایسه مستقیم فواصل نقطه به نقطه با استفاده از روش محاسبه فاصله Hausdorff، محدوده تغییر با توجه به یک آستانه تعیین شده تعیین شد و به روش تغییر کاذب موجود اضافه شد [12 ] .
آثار سنگی منابع ارزشمند تاریخی، هنری و علمی هستند. بنابراین، بررسی آثار و حفظ اطلاعات نه تنها یک کار اساسی بلکه یک وظیفه فنی برای حفاظت است. به دلیل شکل هندسی نامنظم و ساختار پیچیده حکاکیهای سنگی، معمولاً از فناوری اسکن لیزری سه بعدی استفاده میشود. این امکان ارزیابی غیر مخرب، دقت بالا، سرعت و سایر ویژگی های برجسته را برای به دست آوردن داده های دقیق و جامع فراهم می کند. تاکنون، محققان از فناوری اسکن لیزری سه بعدی برای نگهداری اطلاعات [ 13 ]، تخمین پایداری [ 14 ]، بازسازی مجازی [ 15 ] و حتی بررسی باستان شناسی [ 16] استفاده کرده اند.]. با این حال، تلاش کمی در استفاده از فناوری اسکن لیزری سه بعدی برای تشخیص تغییرات در ورق طلا انجام شده است.
این مطالعه بر روی ناحیه متغیر آسیب ورق طلا در آثار حکاکی سنگ تمرکز دارد و از فناوری اسکن لیزری سه بعدی برای شناسایی و اندازهگیری دقیق ناحیه آسیبدیده از طریق کنتراست ابرهای چند نقطهای جمعآوریشده بهره میبرد. چنین داده هایی می توانند برای بازسازی و حفاظت بعدی آثار فرهنگی پشتیبانی کنند. این مقاله به شرح زیر سازماندهی شده است. پس از مقدمه، که در اینجا مروری بر روش های موجود و مشکلات مربوطه ارائه شده است، بخش 2 روش پیشنهادی مورد استفاده برای تشخیص تغییرات در ورق طلا را ارائه می دهد. این با جزئیات تعیین پارامتر دنبال می شود. بخش 3 منطقه آزمایشی و مراحل پردازش داده را شرح می دهد. بخش 4در درجه اول بر تجزیه و تحلیل نتایج بهدستآمده با استفاده از روش پیشنهادی، از جمله راندمان بازیابی، تعیین ناحیه آسیبدیده، و محاسبه مساحت تمرکز دارد. در نهایت، بخش 5 مقاله را با دستورالعمل هایی برای مطالعه بیشتر به پایان می رساند.
2. روش مطالعه
2.1. روش پیشنهادی
از آنجایی که کار مرمت دشوار، پیچیده، وقت گیر و پرهزینه است، یافتن یک تکنیک ترمیم موثر برای حفاظت از آثار آتی بسیار مهم است. با این به عنوان نقطه شروع، روشی برای استفاده از یک هشت خطی برای سازماندهی ابرهای نقطه ای در این مقاله پیشنهاد شده است. بر اساس این هشت خطی، یک طرح رمزگذاری اصلاح شده است که امکان تبدیل عدد اکتالی اکتان های درخت را به یک عدد طبیعی فراهم می کند و در نتیجه کارایی بازیابی را بهبود می بخشد. روشی برای تقسیم با استفاده از حافظه بالاتر به طور همزمان ایجاد شده است که می تواند هزینه ها را به طور قابل توجهی کاهش دهد. در نهایت، الگوریتمی برای جستجوی ناحیه آسیب دیده با استفاده از مدل مش مثلثی توسعه داده شده است که در آن از فرمول هرون برای محاسبه مساحت سطح منطقه مورد نظر استفاده می شود.شکل 2 .
2.2. تشخیص آسیب ورق طلا بر اساس اکتری خطی بهبود یافته
2.2.1. تعیین آستانه خسارت
(1) تجزیه و تحلیل خطا
سه نوع خطا وجود دارد که می تواند در جمع آوری و پردازش داده های ابر نقطه رخ دهد. نوع اول خطای سیستم ابزار است که عمدتاً توسط خطاهای محدوده، خطاهای زاویه محدود می شود [ 17]]، وضوح داده های ابر نقطه، و حتی ویژگی های خود پرتو لیزر. خطای ابزار در یک اسکنر لیزری سه بعدی معمولاً توسط سازنده ارائه می شود، اما همچنان باید برای کاهش عدم دقت کالیبره شود. نوع دوم خطا در فرآیند جمع آوری داده های ابر نقطه ای، از جمله خطاهای ناشی از محیط خارجی (به عنوان مثال، فشار هوا، دما و رطوبت) ایجاد می شود. این شامل خطاهای ناشی از انعکاس سطح شی مورد نظر (به عنوان مثال، سطح شیب، بافت، رنگ، زبری، و اثرات حاشیه) و خطاهای ناشی از جهت گیری اسکنر است. در این میان، دقت جهت گیری اسکنر مستقیماً بر دقت نتایج تشخیص تأثیر می گذارد [ 12]]. خطای نوع سوم ناشی از ثبت مختصات است. در طول فرآیند جمعآوری دادهها، یک ایستگاه واحد ممکن است نتواند جمعآوری تمام دادههای شی را انجام دهد. بنابراین، چندین ایستگاه برای جمع آوری داده ها مورد نیاز است. اتصال بین هر دو ایستگاه به نقاط مشترک اسکن شده در هر دو مکان بستگی دارد تا ضرایب تبدیل بدست آید. دقت و توزیع نقاط مشترک می تواند به طور مستقیم بر دقت ثبت ابر نقطه تأثیر بگذارد [ 12 ].
(2) تعیین آستانه خسارت
از طریق تجزیه و تحلیل خطا، می توانیم آستانه مجموع خطاهای متعدد را تعیین کنیم که برای تعیین اینکه آیا آسیب رخ می دهد یا خیر، استفاده می شود. علاوه بر این، وضوح دادههای ابر نقطهای که میتوان آن را بازه اسکن نیز نامید، نیز باید در نظر گرفته شود. بنابراین، آستانه آسیب را می توان با استفاده از فرمول زیر تعیین کرد:
که در آن δ آستانه آسیب، α خطای سیستم ابزار، β خطای جمعآوری دادههای ابر نقطه، γ خطای ثبت مختصات، و η وضوح دادههای ابر نقطه است.
2.2.2. فاصله هاسدورف جزئی
در زمینه بینایی کامپیوتر، فاصله Hausdorff اغلب برای تطبیق تصویر الگو استفاده می شود [ 18 ]. ما آن را به فضای سه بعدی معرفی کردیم تا درجه شباهت بین ابرهای چند نقطه ای را در این مقاله تعیین کنیم و نواحی متغیر را بیشتر تعیین کنیم (به عنوان مثال، مناطق آسیب به ورق طلا).
فاصله هاسدورف جزئی به صورت زیر تعریف میشود: اگر مجموعه Q شامل n نقطه باشد، فاصله هاسدورف جزئی از نقطه K ام (1 ≤ K ≤ n ) مقدار K ام در مجموعه Q پس از مرتبسازی است. فرمول به شرح زیر است:
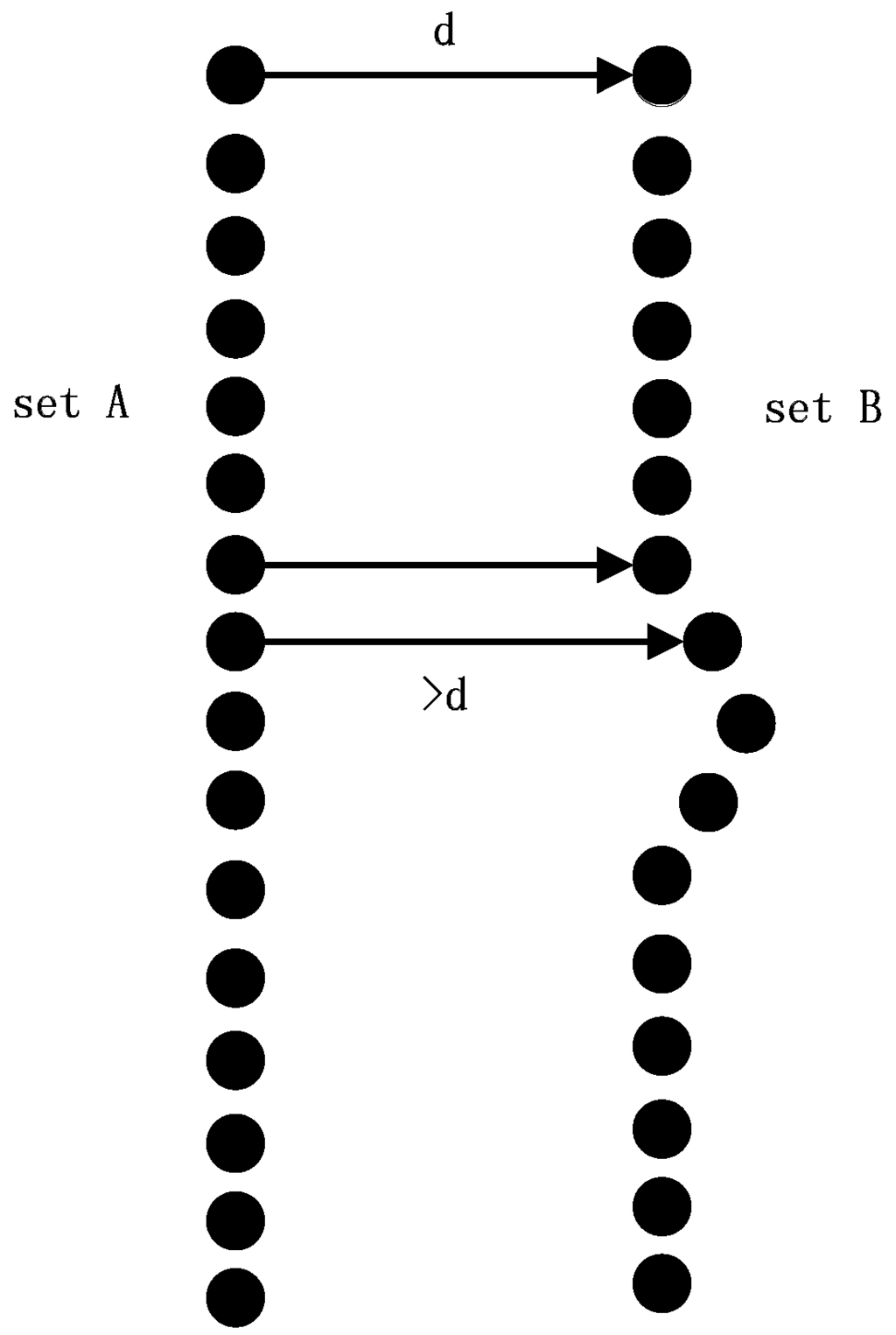
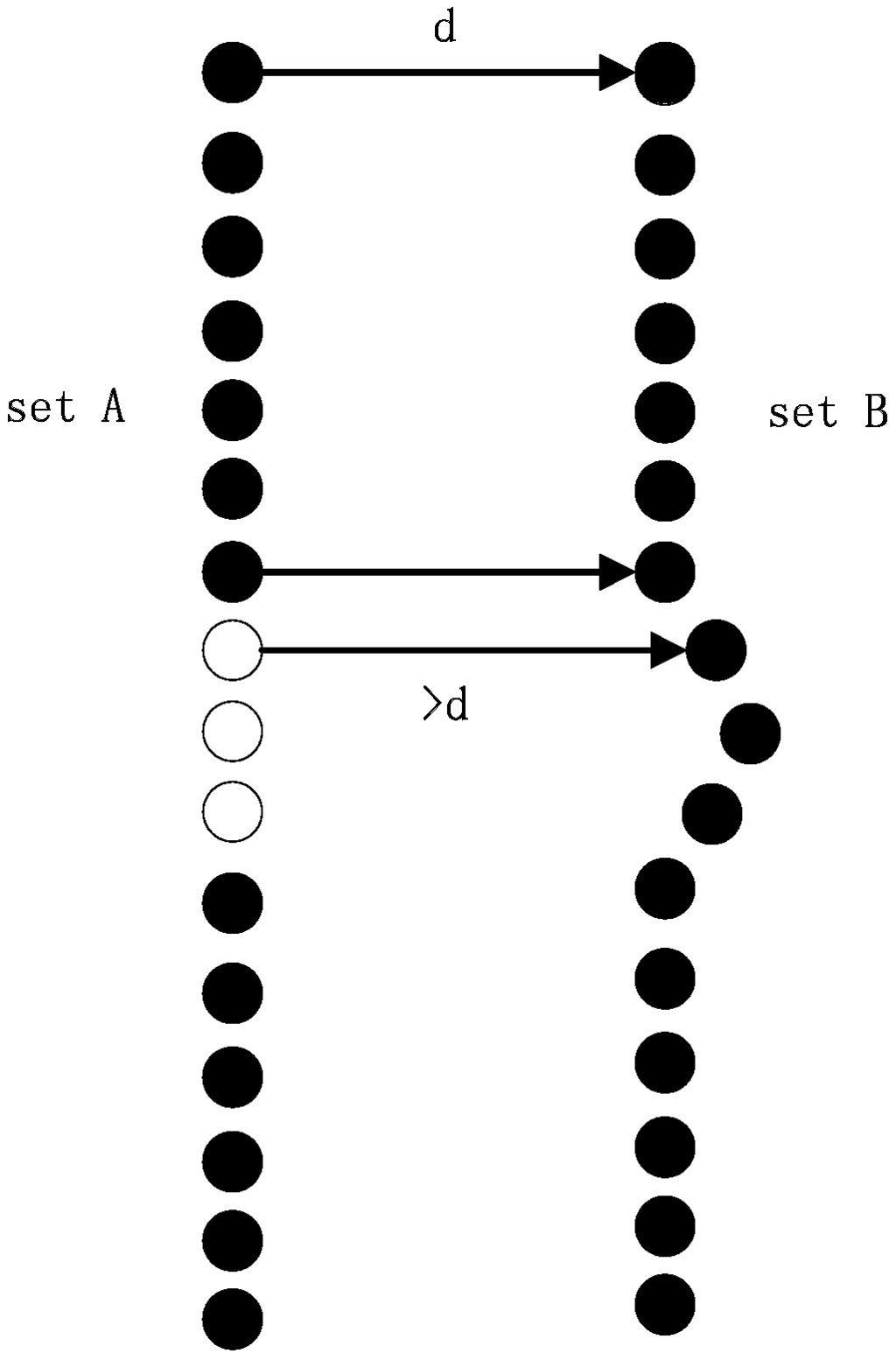
جایی که [ خطای پردازش ریاضی ]ک�∈ستیساعتپس از مرتب سازی از مجموعه Q به مجموعه P ، مقدار K th را در مجموعه مقادیر فاصله نشان می دهد . منطقه آسیب دیده را می توان با استفاده از تعریف فاصله جزئی هاسدورف و آستانه آسیب اکتسابی تعیین کرد. تفسیر هندسی آن در شکل 3 نشان داده شده است . اگر آستانه نقاط داده شده d باشد ، زمانی که فاصله جزئی هاسدورف محاسبه شده بزرگتر از d باشد ، نقطه را می توان به عنوان یک نقطه متغیر در نظر گرفت همانطور که در شکل 4 نشان داده شده است .
با این حال، به دلیل زاویه اسکن، انسداد، نشتی و سایر مشکلاتی که در طی فرآیند تشخیص رخ می دهد، داده های ابر نقطه ای که متعلق به یک مجموعه هستند و از اسکن های مختلف به دست می آیند ممکن است دقیقاً یکسان نباشند. در نتیجه، استفاده از الگوریتم فاصله Hausdorff برای تشخیص دادههای ابر نقطه جمعآوریشده در مراحل مختلف ممکن است منجر به دادههایی شود که تغییرات نادرست را نشان میدهند. بنابراین، با فرض اینکه ابر نقطه مرجع اطلاعاتی بدون آسیب باشد، داده های ابر نقطه در حال تغییر، داده هایی هستند که باید شناسایی شوند. یافتن و حذف نواحی تغییر نادرست با استفاده از روش تبادل داده های ابر نقطه مرجع و تغییر داده های ابر نقطه ضروری است. این کار به منظور مقایسه فواصل نقطه به نقطه با استفاده از روش محاسبه فاصله Hausdorff به طور مکرر انجام می شود.
2.2.3. سازماندهی دادههای ابر نقطهای بر اساس اکتری خطی بهبودیافته
(1) زیرفضای هشت خطی بر اساس عدد طبیعی
روش مرسوم سازماندهی داده های ابر نقطه ای، ساختار ترکیبی درخت KD و octree است. درخت KD که از درخت دودویی سرچشمه می گیرد، یک ساختار داده برای فضای k بعدی است. به این ترتیب، هر گره غیر برگ توسط یک ابر صفحه به دو فضای فرعی تقسیم می شود تا زمانی که همه زیرفضاها به دو قسمت تقسیم شوند (همانطور که در شکل 5 مشاهده می شود ).
علاوه بر این، در مقایسه با ساختار چهار درختی، درخت KD دارای مزیت آشکاری در تعادل و انعطاف پذیری به دست آمده در طول تقسیم بندی فضایی است. همانطور که در شکل 6 نشان داده شده است ، زیربخش درخت KD با کمترین لایه های فرعی انعطاف پذیرترین است.
با این حال، درخت KD هنوز هم معایبی دارد. اولا، ساختار به ترتیب درج نقاط داده بسیار حساس است. اگرچه درخت KD تطبیقی وضعیت نامتعادل درخت KD را تغییر می دهد، درخت کاملاً ایستا است. و هر عملیات به روز رسانی (به عنوان مثال، درج، حذف) تعادل را از بین می برد. بنابراین، برای به روز رسانی های مکرر مناسب نیست [ 19 ].
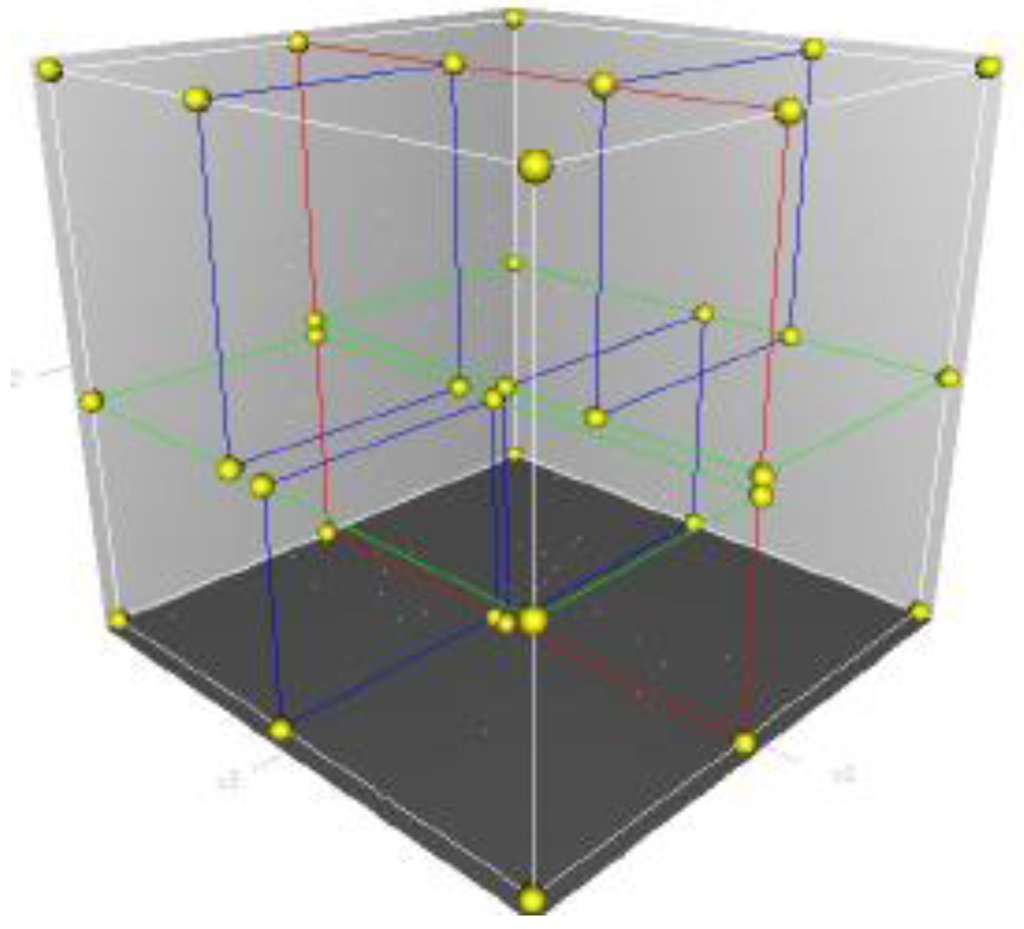
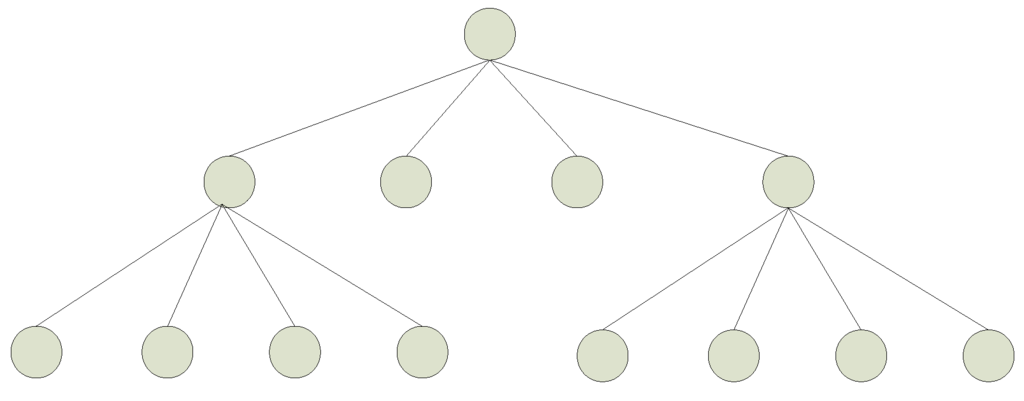
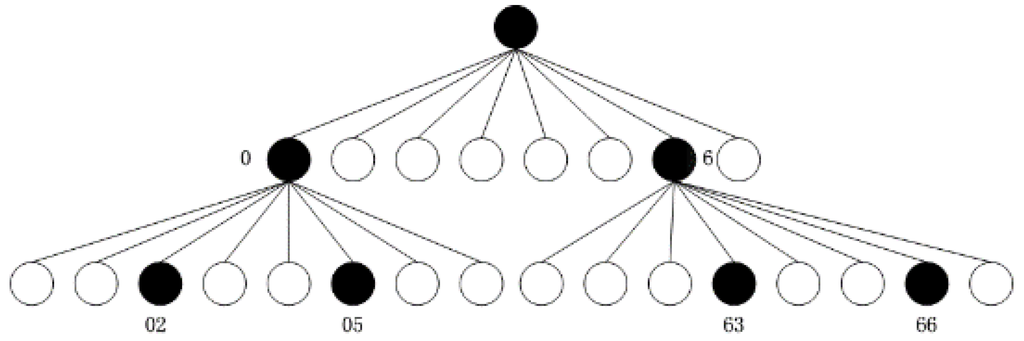
octree که توسعه ساختار چهار درختی است (در شکل 7 مشاهده می شود) و معمولاً برای توصیف فضای سه بعدی استفاده می شود، به طور گسترده در بسیاری از حوزه ها مانند مدل سازی سه بعدی، فشرده سازی داده های وکسل، انتقال پیش رونده و برنامه های کاربردی رندر استفاده می شود. . از آنجایی که هر گره شامل هشت گره فرعی است و هر گره نشان دهنده یک مکعب کوچک در فضای سه بعدی است، مجموع هشت حجم کوچک مکعبی برابر با حجم گره والد است (همانطور که در شکل 8 نشان داده شده است ) .
علاوه بر این، هشت خطی گره های برگ را با یک عدد اکتال کد می کند. با وجود اینکه اکثر زبان های برنامه نویسی از octal پشتیبانی می کنند، اما همچنان به واحدهای حافظه مناسب برای ذخیره گره ها در کد اکتال داده های ابر نقطه ای نیاز دارد. این یک رابطه متناظر بین گره اکتال و زیرمجموعه آرایه برقرار می کند که کارایی ساخت این شاخص را تا حد زیادی کاهش می دهد. با این حال، تبدیل عدد اکتال به عدد اعشاری و در نظر گرفتن عدد اعشاری به عنوان زیرنویس آرایه می تواند این ناراحتی را کاملاً دور بزند. در مقایسه با عدد اکتالی، عدد اعشاری از اهمیت زیادی برخوردار است. به عنوان مثال، اعداد اعشاری مطابق با عادات افراد است و می توان آن را به راحتی در زبان کامپیوتر پیاده سازی کرد که به طور کامل در الگوریتم بهینه سازی منعکس می شود [ 20] .]. علاوه بر این، داده های ابر نقطه ای بزرگ و به خوبی بیان شده اند و هیچ رابطه توپولوژیکی بین نقاط فضایی سه بعدی ندارند. به این دلایل، ما از یک octree خطی برای سازماندهی داده ها برای محاسبه فواصل Hausdorff بین دو مکان مختلف ابر نقطه زمانی استفاده می کنیم [ 21 ]. این نه تنها برای جستجوی نقاط مجاور راحت است، بلکه می تواند کارایی عملیاتی فاصله Hausdorff را تا حد زیادی بهبود بخشد.
(2) یک روش تقسیم خطی octree بهبود یافته
با توجه به مزایای ساختار ساده، کد مختصر و استفاده کمتر از حافظه، octree خطی به طور گسترده در سازماندهی ابر نقطه استفاده می شود [ 22 ، 23 ، 24 ، 25 ، 26 ]. با این حال، با توجه به اینکه دادههای ابر نقطهای بهدستآمده توسط اسکن لیزری سهبعدی ممکن است از سطوح شی نشأت بگیرند، این دادهها عمدتاً شکل یک پوسته نازک را منعکس میکنند که ممکن است منجر به گرههای خالی زیادی در ساختار هشتگانه شود (شکل 6 را ببینید) .). اگرچه این گرههای خالی هیچ دادهای ندارند، اما همچنان در زمان تخصیص اولیه حافظه به آنها فضای حافظه اختصاص داده میشود. این منجر به اتلاف قابل توجه حافظه می شود و در نهایت منجر به شرایط جدی تری می شود، مانند حافظه ناکافی پس از تقسیم شدن بخش به درجات معین و عدم امکان ادامه تقسیم.
بنابراین، یک روش تقسیم بهبود یافته برای octree خطی، که تنها حافظه را به گرههای غیر خالی اختصاص میدهد، پیشنهاد شده است. قبل از تخصیص حافظه، نیاز به تعیین خالی بودن گره دارد. اگر گره خالی باشد، هیچ حافظه ای تخصیص داده نمی شود که به میزان قابل توجهی نیاز به حافظه را کاهش می دهد.
روش عملیاتی خاص به شرح زیر است:
- (1)
-
کادر مرزی ابر نقطه را محاسبه کنید. این ریشه هشت خطی است. فرض کنید L طول جعبه مرزی است، L را می توان با فرمول زیر تعیین کرد:
سپس نقطه ای با کوچکترین مختصات را به عنوان نقطه شروع کادر محدود انتخاب کنید. سپس جعبه مرزی را می توان به صورت ( Xmin , Y min , Z min , L ) بیان کرد .
- (2)
-
محاسبه طول وکسل یک وکسل که طول آن با تقسیم مشخص می شود، کوچکترین مکعب پس از تقسیم بندی است. اگر عدد تقسیم برابر با n باشد، طول وکسل را می توان با فرمول زیر محاسبه کرد:
- (3)
-
رمزگذاری اعشاری را برای هر نقطه به عنوان کارت شناسایی آنها محاسبه کنید.
- (4)
-
با استفاده از الگوی نقشه برای STL (کتابخانه الگوی استاندارد) در C++، تعداد مقادیر رمزگذاری اعشاری را برای به دست آوردن گره هایی که خالی نیستند، بشمارید.
- (5)
-
برای هر گره بر اساس تعداد گره هایی که وجود دارد، حافظه اختصاص دهید.
- (6)
-
ابرهای نقطه ای را با توجه به شناسه های ابر نقطه در آرایه مربوطه ذخیره کنید.
2.2.4. جستجو و محاسبه مناطق آسیب دیده بر اساس مش مثلثی
(1) جستجوی مناطق آسیب دیده بر اساس یک مش مثلثی شکل
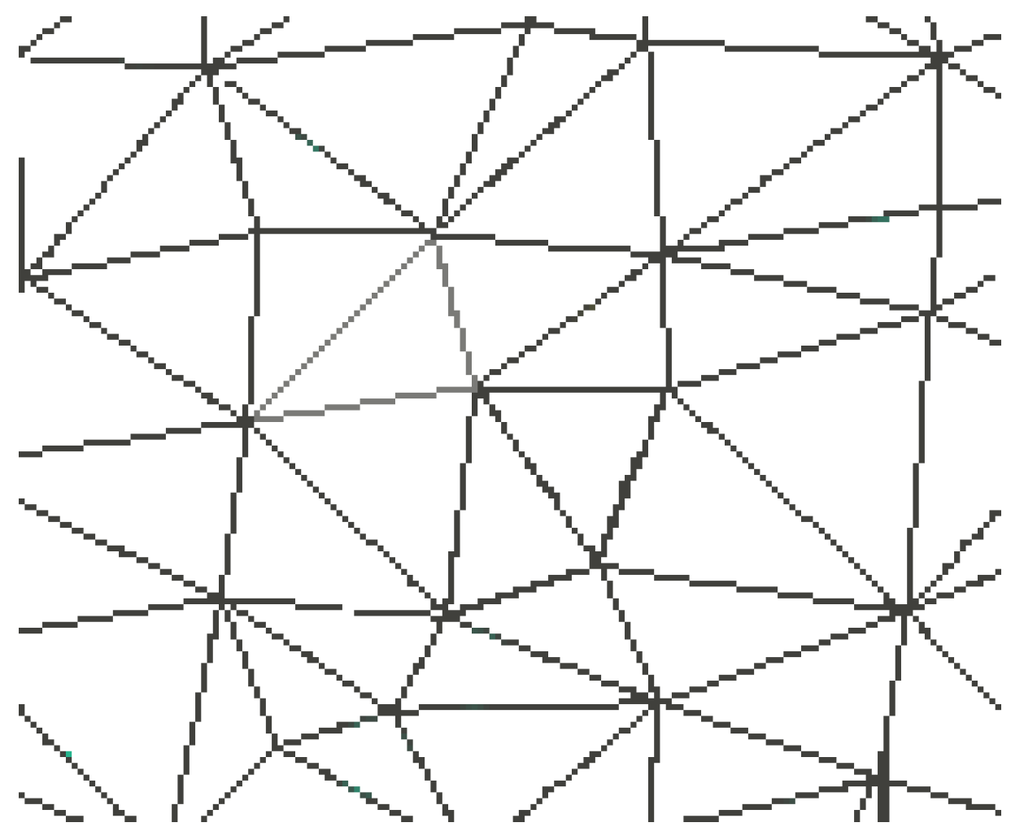
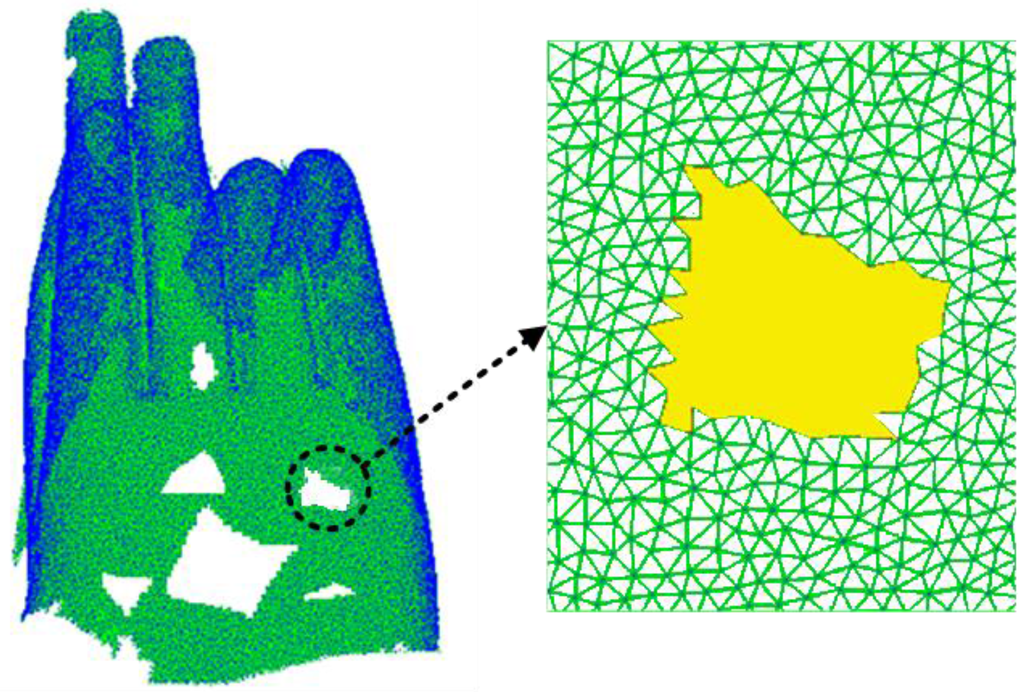
با استفاده از محاسبه فاصله Hausdorff، نقاط بیش از آستانه شناسایی شده به عنوان نقاطی در منطقه آسیب دیده در نظر گرفته می شوند. با این حال، داده های ابر نقطه ای برای محاسبه مساحت سطح آسیب دیده مناسب نیستند. بنابراین، این مقاله یک مدل مش مثلثی را بر اساس داده های ابر نقطه [ 27 ] ایجاد می کند. این مدل نمایشی تقریبی از سطح جسم و مجموعهای از تکههای مثلثی با نقاط شناسایی شده نشان دهنده راس است، همانطور که در شکل 9 نشان داده شده است .
تا حدودی، تغییر موقعیت ابر یک نقطه می تواند تغییر موقعیت سطح ناحیه همسایه کوچک جزئی را با یک نقطه خاص به عنوان راس منعکس کند. بنابراین، مجموعه ای از تکه های مثلثی با استفاده از این نقطه به عنوان راس می تواند برای نشان دادن ناحیه آسیب دیده همانطور که در شکل 10 نشان داده شده است ایجاد شود . با توجه به ابر نقطهای شناساییشده در ناحیه آسیبدیده، میتوانیم مجموعهای از تکههای مثلثی را با این نقاط بهعنوان رأس جستجو کنیم که نشاندهنده ناحیه آسیبدیده است.
(2) محاسبه ناحیه آسیب دیده بر اساس مش مثلثی شکل
یک شبکه مثلثی نامنظم مجموعه ای از مثلث های فضایی زیاد است. برای محاسبه مساحت شبکه مثلثی، مساحت کل این مثلث ها را محاسبه می کنیم. از آنجایی که کل مجموعه مختصات راس مشخص است، طول ضلع مثلث ها نیز مشخص است. بنابراین می توان مساحت سطح مش مثلثی نامنظم را طبق فرمول هرون محاسبه کرد که به صورت زیر بیان می شود.
اگر طول ضلع های مثلث i به ترتیب a i ، b i ، c i باشد ، محیط p i مثلث i به صورت زیر خواهد بود:
مساحت s i مثلث i به صورت زیر خواهد بود:
کل مساحت سطح S مدل به صورت زیر خواهد بود:
3. منطقه تحقیقاتی و تشخیص آسیب
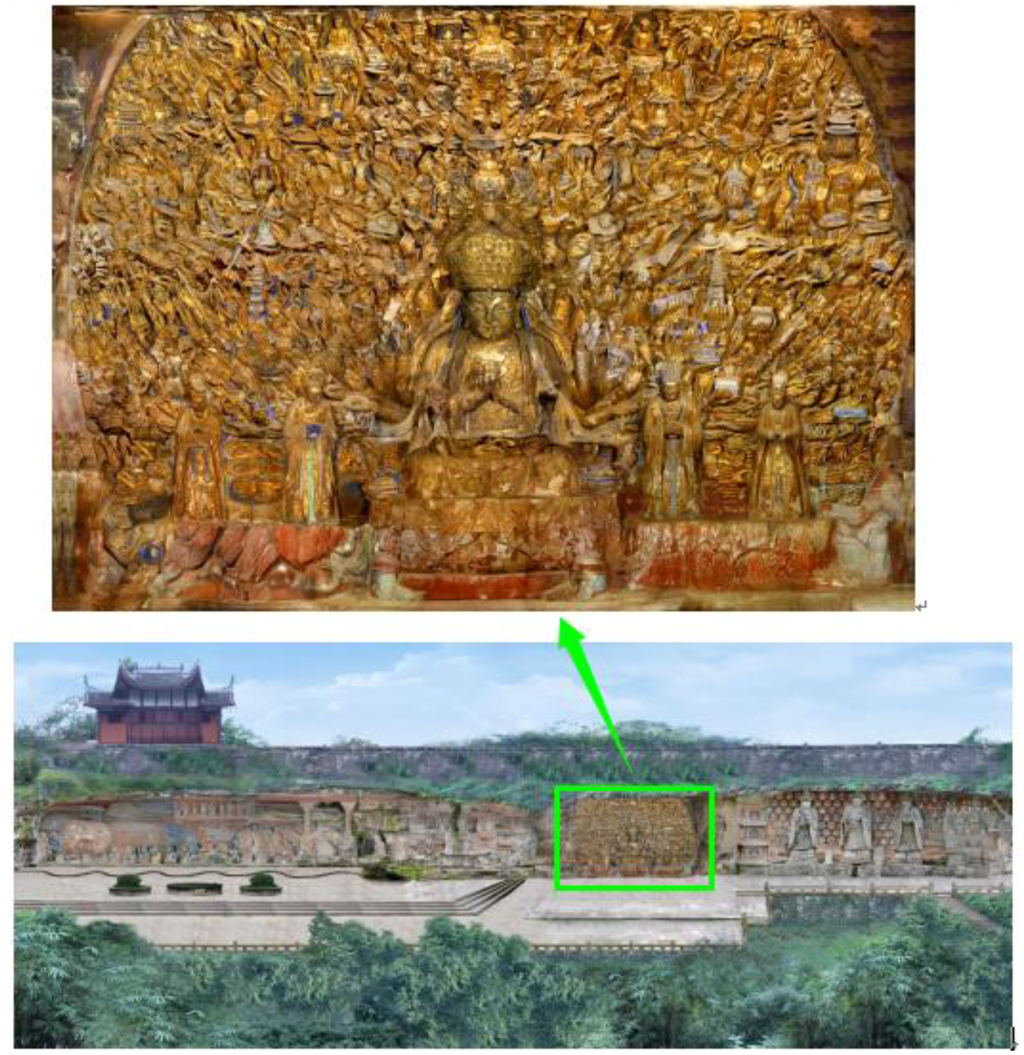
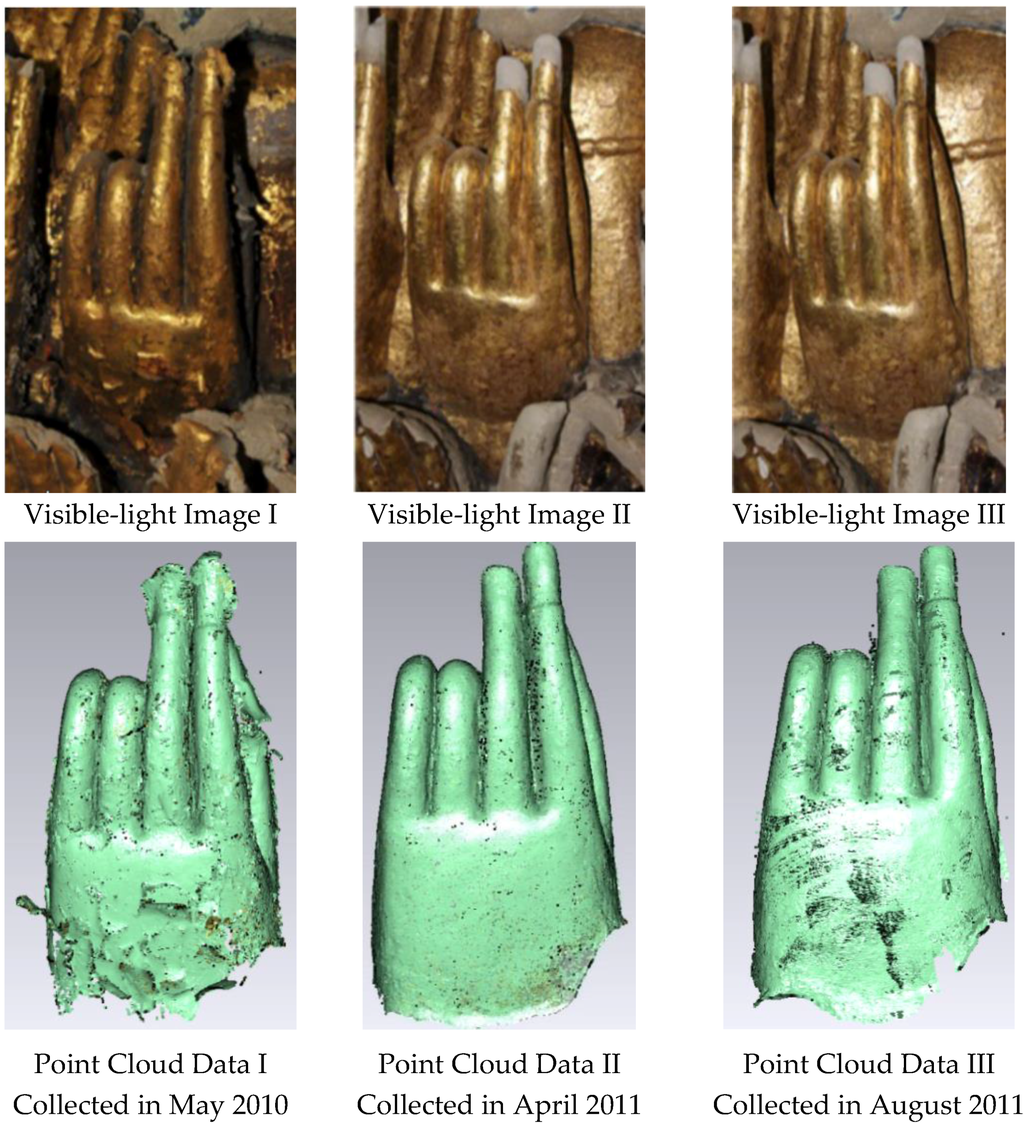
مجسمه هزار دست بودیساتوا که در دوران سلسله سانگ سانگ حک شده بود، در صخره جنوبی کوه دازو بائودینگ در چونگ کینگ، چین، بزرگترین مجسمه هزار دست بودیساتوا در چین است که در صخره حکاکی شده است (در شکل 11 مشاهده می شود ) . طلا در سراسر سطح مجسمه پوشانده شده است و باعث می شود که آن را باشکوه و باشکوه جلوه دهد. با این حال، پس از بیش از 800 سال، مجسمه آسیب های مختلفی را متحمل شده است. ورق طلا روی سطح آسیب جدی وارد کرده است. طبق آمار مطالعه [ 28]، 60 درصد از سطح طلا محو شده و 57.8 درصد ورق طلا در مرکز، قسمت پایین مجسمه افتاده و 43.9 درصد ورق طلای بالایی پیچ خورده است. چنین آسیبی نه تنها تصویر، زیبایی و ارزش هنری مجسمه را به طور جدی تضعیف می کند، بلکه حفظ و یکپارچگی ساختاری سنگ را نیز تهدید می کند. به منظور آزمایش روش پیشنهادی، ما از یک طرف ترمیم ورق طلا را انجام دادیم و آن را برای به دست آوردن دادههای ابر نقطهای چند زمانی تحت نظارت قرار دادیم.
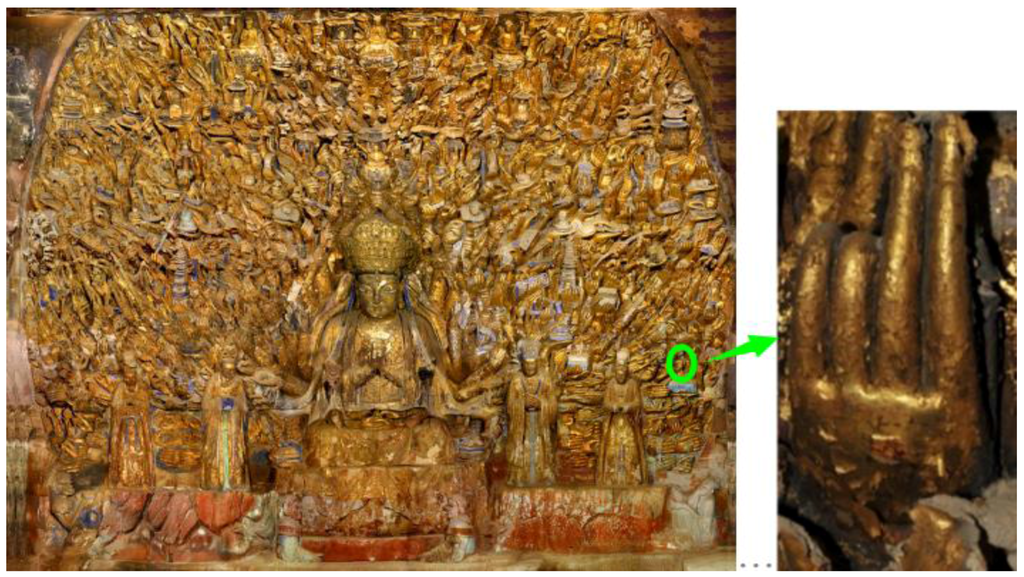
3.1. داده های تجربی
داده های ابر نقطه ای در این آزمایش توسط یک اسکنر بازوی مفصلی قابل حمل رومر جمع آوری شد. فاصله ابر نقطه ای 0.05 میلی متر و دقت تک نقطه ای 0.01 میلی متر بود. به منظور تسهیل جمع آوری داده ها و نظارت بر نقاط هدف، دست 9-10-S2 (نشان داده شده در شکل 12 ) را که در گوشه سمت راست پایین مجسمه قرار دارد، به عنوان شی آزمایشی انتخاب کردیم. ترمیم ورق طلا برای این دست در اکتبر 2010 انجام شد. به منظور نظارت بر تغییرات در ورق طلا، جمع آوری داده های چند زمانی با همان اسکنر انجام شد. همانطور که در شکل 13 نشان داده شده است، داده های ابر نقطه و بافت در سه زمان مختلف جمع آوری شدند(ابر نقطه سمت چپ قبل از بازسازی جمع آوری شد و بقیه بعد از بازسازی جمع آوری شد). به منظور یکسان سازی مختصات چند زمانی در حین جمع آوری داده ها، ما به طور همزمان مجموعه ای از داده های نقطه کنترل را نیز انجام دادیم، یعنی ثبت بین مجموعه داده های جمع آوری شده در زمان های مختلف و ایستگاه ها از طریق برخی نقاط مشترک در همه اسکن ها تضمین می شود.
3.2. تشخیص آسیب
ما دادههای ابر نقطهای را با نرمافزار Geomagic (یک سیستم اسکن و طراحی سه بعدی) ثبت کردیم و با انتخاب نقاط کنترل پایدار، مختصات را یکسان کردیم. دقت ثبت نهایی 0.5 میلی متر بود. بر اساس دقت جمع آوری و ثبت ابر نقطه، آستانه تشخیص آسیب 0.6 میلی متر تعیین شد.
ثانیا، دادههای ابر نقطهای را با یک اکتری خطی سازماندهی کردیم. با توجه به موارد فوق، می دانیم که آستانه تشخیص آسیب 0.6 میلی متر است. از آنجایی که دادههای ابر نقطه ممکن است در مرز وکسل ظاهر شوند، تنظیم مقدار آستانه بسیار بزرگتر از آستانه محاسبهشده، مانند 1.0 میلیمتر، ایمنتر است. همانطور که در شکل 14 نشان داده شده است، به نوبه خود، حداقل جعبه مرزی را می توان با توجه به داده های ابر نقطه کار کرد ، و سپس به تعداد لایه های تقسیم می رسد. L 376.54 میلی متر محاسبه شد و طبق فرمول های (3) و (4) می توان تعداد ردیف ها را در تقسیم κ بدست آورد:
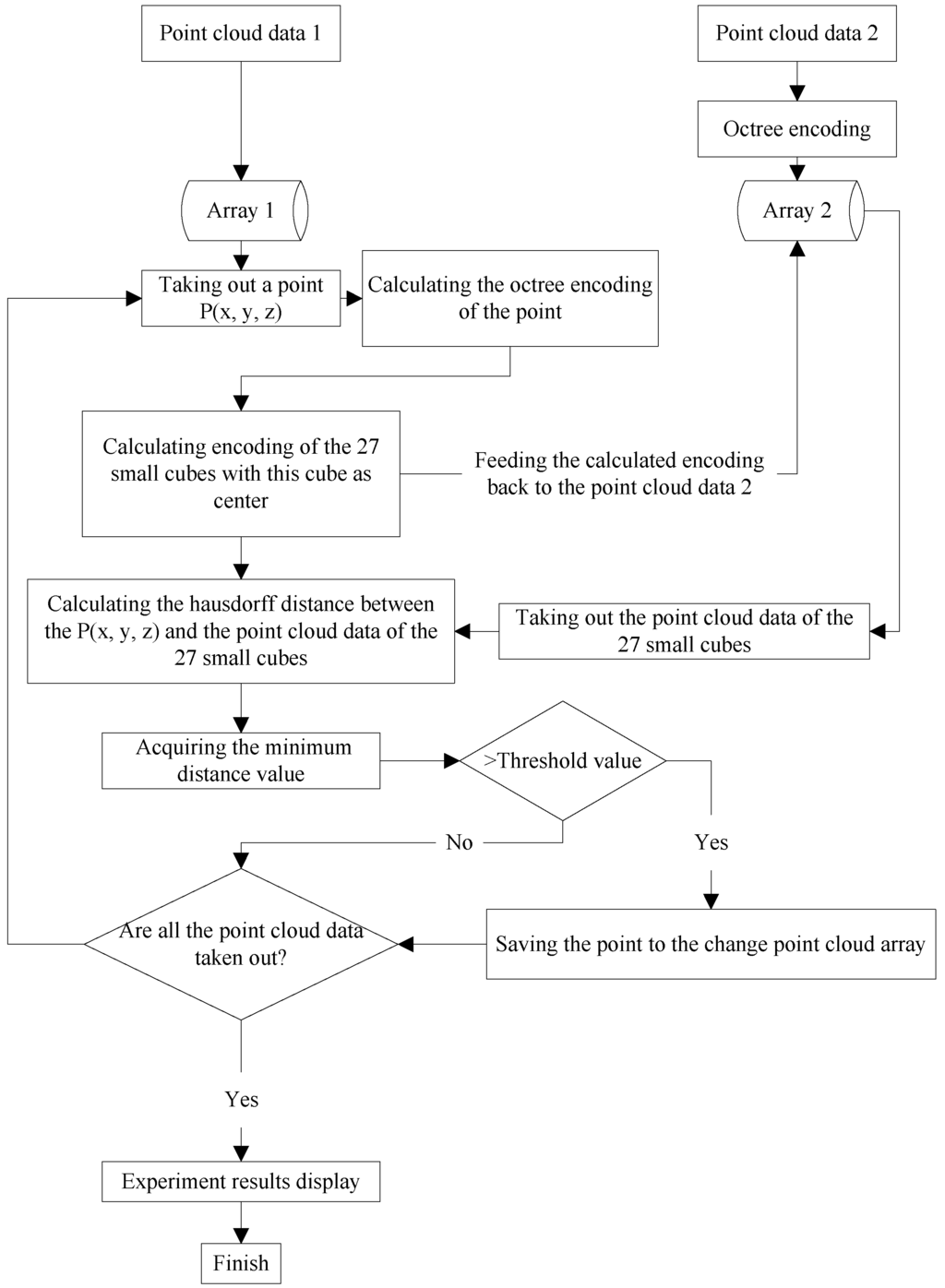
بنابراین، زمان تقسیم باید کمتر از 9 باشد و بزرگترین مقدار 8 باشد. شکل 15 فرآیند کلی را نشان می دهد که در طول آزمایش انجام شده برای تشخیص آسیب ورق طلا اجرا شده است.
4. نتایج
4.1. تعیین منطقه آسیب دیده
در این مقاله، روش جدیدی بر اساس شبکه مثلثی برای جستجوی مناطق آسیب دیده ارائه شده است. به منظور تأیید روش و الگوریتم های آن، آزمایشی برای مقایسه و تجزیه و تحلیل نتایج به دست آمده از یک ابر نقطه ای با استفاده از دو تکنیک مختلف انجام شد. این داده ها شامل آسیب بود و با شناسایی دستی و شناسایی خودکار با استفاده از تکنیک پیشنهادی به دست آمد. آنها به ترتیب در شکل 16 و 17 نشان داده شده اند . مقایسه نشان میدهد که نتایج بهدستآمده با استفاده از دو روش مشابه هستند و روش استفاده از مش مثلثی برای جستجوی مناطق آسیبدیده عملی است.
نتایج زیر از آزمایش تشخیص آسیب با استفاده از دادههای ابر نقطه فویل طلا در سه زمان مختلف بهدست آمد. شکل 18 نتایج تشخیص را از بار اول و دوم نشان می دهد. بدیهی است که داده های ابر نقطه به دست آمده در این دو زمان تقریباً در آستانه تشخیص بیماری یکسان هستند. هیچ آسیب آشکاری وجود ندارد، به جز آن نقاط مشکوک در مفاصل سوم انگشت حلقه و شست. در مقایسه با تصاویر نور مرئی، هیچ تغییر آشکار، ترک، سقوط، یا سایر پدیده های بیماری وجود نداشت. بنابراین، میتوان نتیجه گرفت که تنها حفرههای ورق طلا در این منطقه رخ داده است. تحقیقات در محل این پیش بینی را تایید کرد.
شکل 19 نتایج تشخیص داده های ابر نقطه ای را نشان می دهد که از بار اول و سوم به دست آمده اند. واضح است که آسیب آشکاری در انگشت شست و انگشت حلقه وجود دارد. در مقایسه با تصاویر نور مرئی، میتوانیم ببینیم که حفرههای ورقه طلا در این منطقه رخ داده است و تحقیقات در محل این حدس و گمان را تأیید کرد.
4.2. محاسبه مساحت
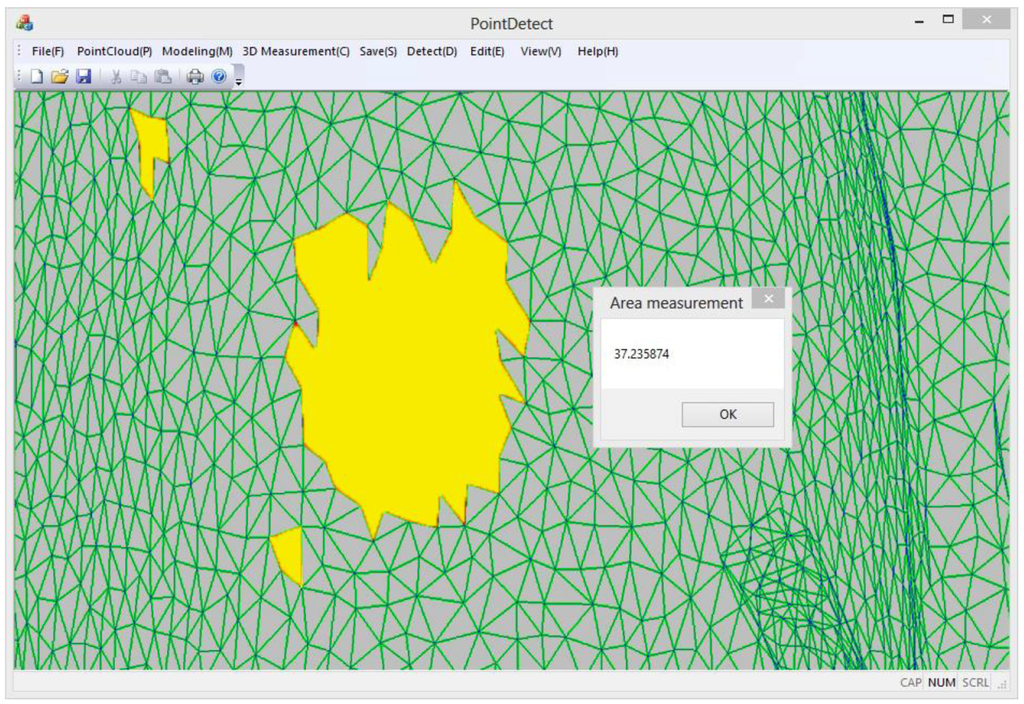
به منظور اعمال نتایج تشخیص ابر نقطه ای برای حفظ این اثر فرهنگی، باید سطح ورق طلای آسیب دیده را بدانیم تا بتوانیم میزان طلای مورد نیاز در فرآیند مرمت را محاسبه کنیم. با توجه به روش محاسبه منطقه آسیب دیده که در بخش 2 توضیح داده شده است، ما نتایج تشخیص را در ناحیه زرد ابر نقطه محاسبه کردیم و ناحیه آسیب دیده حدود 37.23 میلی متر مربع را به دست آوردیم ، همانطور که در شکل 20 نشان داده شده است .
4.3. کارایی بازیابی
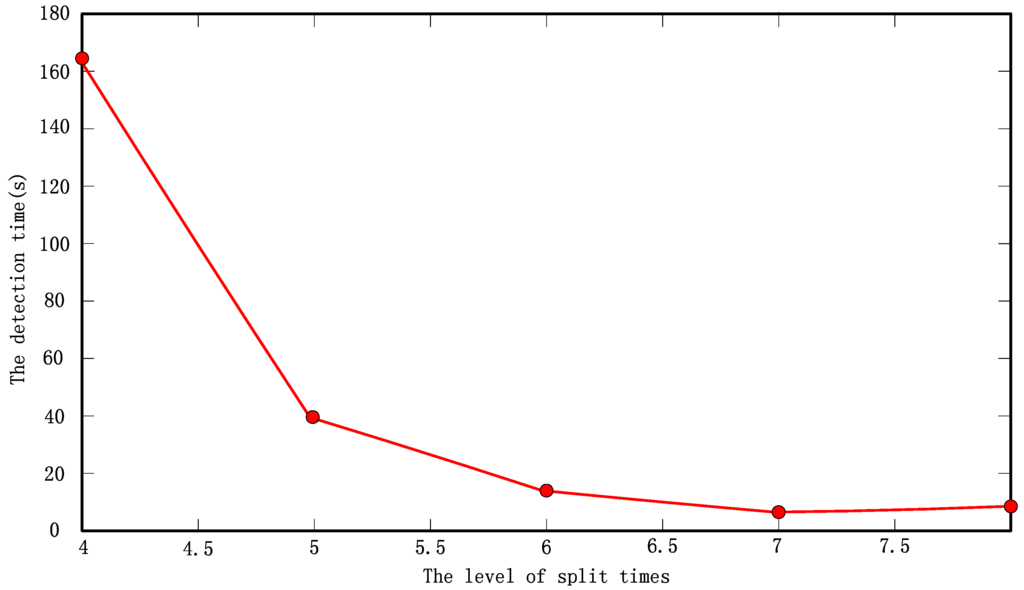
همانطور که قبلا مشخص شد، تعداد تقسیم لایه باید کمتر از 9 باشد و بزرگترین مقدار 8 باشد. بنابراین، در طول آزمایش، مقادیری از 4 تا 8 به طور متوالی به سطح تقسیم اختصاص داده شد و زمان اجرای سیستم ثبت شد (جدول 1) .). توجه داشته باشید که در جدول، سطح تقسیم 2 و 3 درج نشده است زیرا تشخیص آنها به زمان زیادی نیاز دارد. مشاهده می شود که همراه با افزایش مستمر تعداد لایه ها، تعداد گره ها 8 عدد افزایش یافت و زمان مورد نیاز برای ساخت شاخص نیز افزایش یافت. با این حال، زمان بازیابی به سرعت کاهش یافت. بنابراین، بین زمان رمزگذاری و زمان بازیابی، یک مصالحه برای دستیابی به حداقل زمان تشخیص مورد نیاز است. از این آزمایش مشاهده می کنیم که سطح هفتم که دارای حداقل زمان تشخیص کل است، انتخاب بهینه است. رابطه بین سطح تقسیم و زمان تشخیص کل در شکل 21 نشان داده شده است .
5. بحث و نتیجه گیری
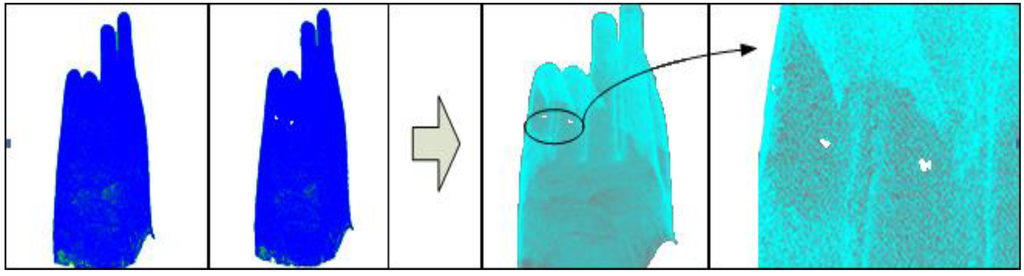
روشی برای استفاده از دادههای ابری نقاط اسکن لیزری سه بعدی چند زمانی برای تشخیص آسیب ورق طلا بر روی بقایای حکاکی سنگ پیشنهاد و با استفاده از یک دست مجسمه هزار دست بودیساتوا آزمایش شد. استحکام و امکان سنجی این روش زمانی که برای دست های دیگر اعمال شد نیز نشان داده شد. قبلاً به طور گسترده در تشخیص تغییرات ورق طلا در مجسمه هزار دستی بودیساتوا استفاده شده است. این روش امکان تعیین آستانه بیماری را با تجزیه و تحلیل خطاهای داده ابری نقطه ای فراهم می کند. سازماندهی و مدیریت کارآمد دادههای چند زمانی با استفاده از یک روش کدگذاری خطی بهبودیافته octree، که اعداد اکتالی را به اعداد عددی تبدیل میکرد، به دست آمد. شناسایی و کمی سازی ناحیه آسیب دیده با استفاده از مش مثلثی انجام شد. مساحت های محاسبه شده مرجع خوبی برای مرمت ورق طلا در آثار سنگی است. علاوه بر این، نرمافزار تشخیص توسعهیافته در طول این مطالعه امکان نمایش متضاد دادههای ابر نقطه را قبل و بعد از بازیابی مجازی فراهم میکند.شکل 22 یک مثال واضح را ارائه می دهد، که در آن نقاط زرد نشان دهنده یک بازیابی مجازی و نقاط آبی نشان دهنده داده های اصلی هستند.
اگرچه روش پیشنهادی میتواند مناطق بیمار را در ورق طلا بر اساس یک شبکه مثلثی مشخص شناسایی کند، تلاشهای بیشتری برای تشخیص انواع آسیبهای ورق طلا که قابل تشخیص هستند، مورد نیاز است. در حال حاضر این کار توسط نیروهای فنی متخصص انجام می شود که هزینه بر و ناکارآمد است. مطالعات بیشتری در مورد دسته ها و ویژگی های اشکال مختلف آسیب ورق طلا به منظور بهبود روش پیشنهادی باید انجام شود. اینها شامل ایجاد پایگاه داده آسیب ورق طلا و طراحی یک دستگاه الکترونیکی منطبق است که می تواند به طور خودکار دسته آسیب ورق طلا را شناسایی کند.
نتایج آسیب بهدستآمده با شناسایی دستی و خودکار برای نشان دادن استحکام و امکانسنجی روش پیشنهادی مقایسه و تجزیه و تحلیل شد. شناسایی دستی ناحیه آسیب دیده از طریق اندازه گیری مستقیم در ابر نقطه و ناحیه آسیب دیده واقعی روی دست انجام شد. ارزیابی دقیق، که به بسیاری از جنبه ها مربوط می شود و بسیار پیچیده است، فراتر از محدوده این مقاله بود. به طور مشابه، مطالعات آینده باید سعی کنند هر دو هندسه سه بعدی و اطلاعات رنگ RGB را به منظور افزایش دقت تشخیص ناحیه تغییر ترکیب کنند. توسعههای این نوع روش پیشنهادی را بیشتر بهبود میبخشد و آن را به گزینهای مناسب برای حفظ آثار در آینده تبدیل میکند.












بدون نظر