1. معرفی
خط کشی جاده ها، به عنوان زیرساخت های مهم حمل و نقل، اطلاعاتی در مورد مقررات ترافیکی، هشدارها و راهنمایی ها در اختیار رانندگان و عابران پیاده قرار می دهد [ 1 ]. شناسایی و استخراج خط کشی های جاده به عنوان کارکردهای مهم در بسیاری از زمینه ها، مانند مدیریت ایمنی ترافیک [ 2 ، 3 ]، کمک راننده [ 4 ، 5 ، 6 ] و حمل و نقل هوشمند [ 7 ، 8 ] دیده می شود . مطالعات سنتی بیشتر بر روی تصاویر و ویدئوهای دیجیتال متمرکز شده است [ 9 ، 10 ، 11 ، 12 ، 13 ، 14 ،15 ]. نتایج استخراج گاهی به دلیل شرایط بد آب و هوا، شرایط نوری و سایه های پیچیده درختان ناقص یا ناکافی است. علاوه بر این، نتایج در ارائه مختصات سه بعدی (3 بعدی) دقیق اجسام، که ورودی های حیاتی برای سیستم های حمل و نقل هوشمند و مدل سازی سه بعدی شهر هستند، ناکام می ماند.
سالهای اخیر شاهد ظهور اسکن لیزری سیار (MLS) به عنوان یک فناوری پیشرو برای استخراج اطلاعات در مورد سطوح اشیاء شهری بودهایم. سیستمهای MLS که اسکنرهای لیزری، سیستم موقعیتیابی جهانی (GPS)، سیستم ناوبری اینرسی (INS) و دوربینهای دستگاه همراه با شارژ (CCD) را ادغام میکنند [16]، اطلاعاتی مانند دادههای جغرافیایی سه بعدی، بافت و شدت لیزر را جمعآوری میکنند. از مناطق پیچیده شهری زمانی که وسیله نقلیه در حال حرکت است. چنین سیستم هایی به یک راه حل امیدوارکننده و مقرون به صرفه برای مدل سازی سریع محیط جاده تبدیل شده اند. اکثر روش های ارائه شده در مطالعات قبلی برای طبقه بندی ابر نقطه طراحی شده اند [ 17 ، 18 ، 19 ، 20]، استخراج ردپای ساختمان، بازسازی نما [ 21 ، 22 ، 23 ]، و تشخیص اشیاء عمودی قطب مانند [ 24 ، 25 ، 26 ] در یک محیط جاده. تنها چند مطالعه به شناسایی و استخراج خط کشی جاده ها پرداخته اند.
جااکولا و همکاران [ 27 ] ابتدا با استفاده از روش درونیابی و سپس بخشبندی خطکشیهای جادهها و حاشیهها با اعمال آستانهسازی و عملیات مورفولوژیکی بر روی تصاویر ارتفاع و شدت، تصاویر ویژگی جغرافیایی مرجع را بر اساس ارتفاع و شدت تولید کرد. یانگ و همکاران [ 28] وزن و مقادیر پیکسل تصاویر خاکستری را بر اساس توزیع های فضایی (مثلاً فاصله مسطح، اختلاف ارتفاع و تراکم نقطه) نقاط اسکن لیزری محاسبه کرد که الگوریتم آنها را برای تولید تصاویر ویژگی بهبود بخشید. سپس، آنها یک فیلتر شدت و یک فیلتر ارتفاعی اعمال کردند و به دنبال آن محدودیتهایی بر روی شکل و الگوهای توزیع اعمال کردند. روش های ذکر شده در بالا نقاط سه بعدی را به تصاویر دو بعدی تبدیل می کنند زیرا پرداختن به حجم زیادی از نقاط سازماندهی نشده زمان بر و پیچیده است. این تبدیل کارایی محاسباتی را بهبود می بخشد و فرد را قادر می سازد تا از روش های پردازش تصویر به خوبی تثبیت شده استفاده کند. با این حال، این دگرگونی همچنین باعث ایجاد ناهمواری در جزئیات می شود، به خصوص هنگام استخراج اشیاء کوچک، مانند خط کشی جاده.
کامل [ 29 ] و چن [ 30 ] تبدیل رادون و تبدیل هاف را به ترتیب برای استخراج نشانه های خط لبه جامد و خط چین از نقاط MLS اعمال کردند. این روش ها هنگام استخراج نشانه های مستقیم موثر هستند. با این حال، آنها در استخراج نشانه های منحنی ضعف نشان می دهند. از آنجایی که علامت های منحنی معمولاً نامنظم هستند، انتخاب یک مدل منحنی مناسب دشوار است.
آستانه شدت جهانی ساده اغلب برای استخراج خط کشی های جاده استفاده می شود [ 27 ، 28 ، 31 ]. با این حال، شدت غیر یکنواخت علامت گذاری باعث می شود این روش در برخی موارد کمتر موثر باشد زیرا مقادیر شدت تحت تأثیر مواد، زاویه تابش لیزر و محدوده قرار می گیرند. گوان و همکاران [ 32 ] روش جدیدی پیشنهاد کرد که تصاویر شدت را با آستانه های متعدد مربوط به چگالی نقطه تقسیم می کند. با استفاده از روش آنها، یک تصویر مطابق با ویژگی های توزیع چگالی نقطه ای به چندین بلوک تقسیم شد. در بلوک های مختلف، آستانه های بهینه محلی برای استخراج خط کشی های جاده برآورد شد. با این حال، نویز قابل توجهی در این روش معرفی شد.
علاوه بر استخراج خط کشی جاده ها، تشخیص انواع نیز یک کار ضروری و چالش برانگیز است، به ویژه برای تقاطع های گورخری که در تقاطع های جاده های شهری قرار دارند و کارکردهای مهمی در مدیریت ایمنی ترافیک دارند. مانچینی و همکاران [ 33 ] تقاطع های گورخر را با نسبت مساحت، محیط، و طول به عرض به دنبال برچسب گذاری اجزای متصل شناسایی کرد. ریویرو و همکاران [ 34 ] از آشکارساز لبه Canny و تبدیل استاندارد Hough برای شناسایی مجموعه ای از خطوط موازی که جهت های مشابه با خط مرکزی جاده دارند، استفاده کرد. یو و همکاران [ 35] گذرگاه های گورخر را با توجه به عمودهای هندسی جهت توزیع آنها و خطوط مرکزی جاده از سایر خط کشی های مستطیلی شکل متمایز می کند. این مطالعات بیشتر بر روی تشخیص نوارها متمرکز بود و اطلاعات خاصی در مورد مناطق ارائه نکرد. برای سیستم های راهنمای افراد نابینا، ناوبری ربات متحرک و غیره، تأیید اینکه آیا ناحیه جلویی یک گذرگاه گورخر است بدون چنین اطلاعاتی غیرممکن است. مشکل دیگر این است که این روش زمانی که جهت توزیع گذرگاه های گورخر و خطوط مرکزی جاده عمودی نباشد، نامعتبر است.
برای غلبه بر محدودیت های ذکر شده، ما یک روش گام به گام برای شناسایی و بازسازی گذرگاه های گورخر با استفاده از داده های اسکن لیزری سیار در این مقاله پیشنهاد می کنیم. مشارکت های این مقاله به شرح زیر است: (1) یک روش آستانه تطبیقی مبتنی بر پارتیشن بندی سطح جاده برای جبران عدم یکنواختی در داده های شدت و استخراج انواع خط کشی های جاده طراحی شده است. (2) یک روش فیلتر درجه پراکندگی برای کاهش نویز استفاده شد. و (3) گذرگاههای گورخر با توجه به ویژگیهای هندسی شناسایی و بازسازی میشوند، به طوری که ما اطلاعات دقیقتری در مورد منطقه، از جمله موقعیتهای شروع، موقعیتهای پایانی، جهتهای توزیع گذرگاههای گورخر، و جهتهای خط مرکزی جاده به دست میآوریم.
بقیه این مقاله به شرح زیر سازماندهی شده است: شرح گام به گام روش پیشنهادی در بخش 2 ارائه شده است . در بخش 3 ، روش پیشنهادی را روی دادههای MLS گرفتهشده در ووهان، چین آزمایش میکنیم. پس از آزمایشها، نتایج را مورد بحث قرار میدهیم. و در نهایت، نتیجه گیری در بخش 4 آورده شده است .
2. روش
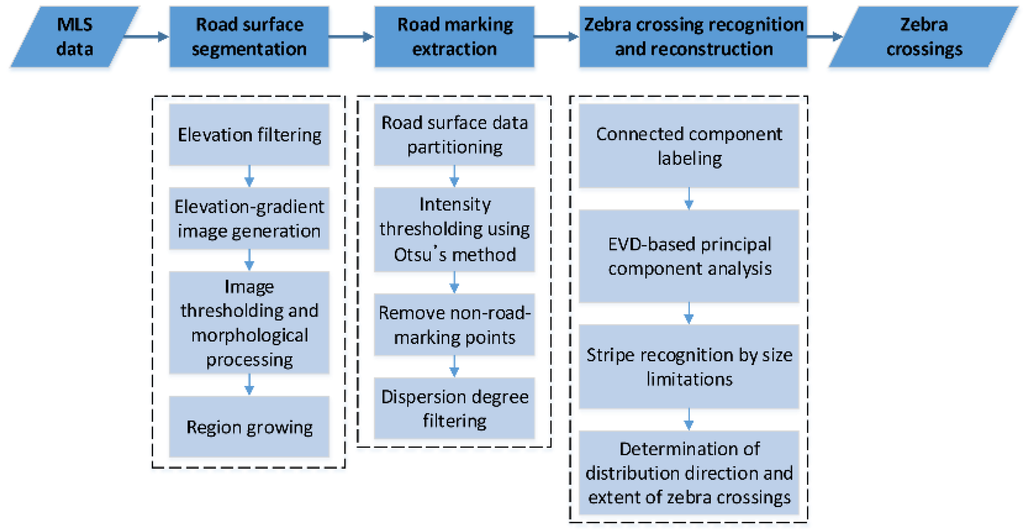
این روش شامل سه روش اصلی است: بخشبندی سطح جاده، استخراج علامتگذاری جاده، و شناسایی و بازسازی تقاطع گورخر. شکل 1 روش های آزمایشی کامل مورد استفاده در این مطالعه را نشان می دهد.
2.1. تقسیم بندی سطح جاده
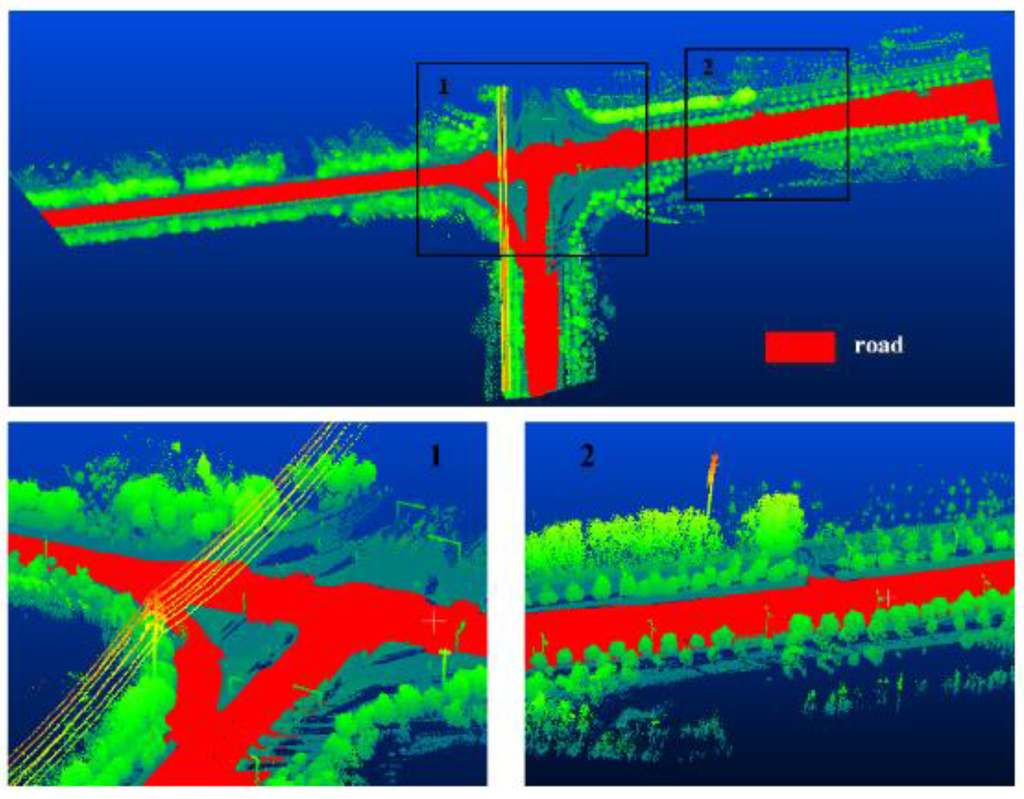
همانطور که در شکل 2 نشان داده شده است، در یک محیط شهری، سطوح جاده ها به طور کلی مسطح هستند، با جهش های ارتفاعی کوچک ناشی از حاشیه سنگ ها در مرزهای جاده ها . ارتفاع نقاط مرزی جاده به طور قابل توجهی سریعتر از نقاط سطح جاده تغییر می کند. گرادیان یک میدان اسکالر نرخ تغییر اسکالر را منعکس می کند. بنابراین، ما سعی میکنیم جادهها را از سایر نقاط از طریق شیب ارتفاعی جدا کنیم و یک الگوریتم رشد منطقه را به تصویر ویژگی شیب ارتفاعی برای تقسیمبندی دقیق سطح جاده اعمال کنیم.
2.1.1. پیش پردازش
به همین ترتیب حجم داده های بزرگ و پیچیدگی صحنه های خیابان شهری، دشواری ایجاد یک مدل جاده یکپارچه را افزایش می دهد. بنابراین، همانطور که در شکل 3 نشان داده شده است ، از داده های مسیر وسیله نقلیه ( L ) برای برش ابرهای نقطه به مجموعه ای از بلوک ها در یک بازه ( d ) استفاده می کنیم . برای اطمینان از اینکه جاده در هر بلوک تا حد امکان صاف و مستقیم است، مقدار d باید در شرایط جاده ای موج دار و پر پیچ و خم کوچکتر تنظیم شود.
2.1.2. فیلتر ارتفاع
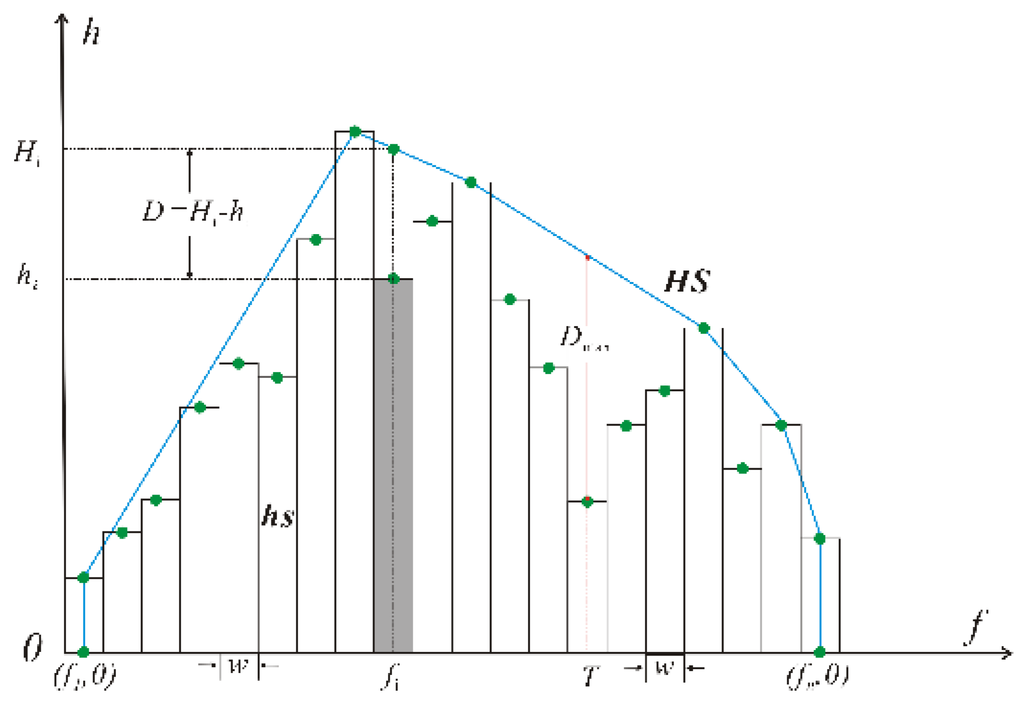
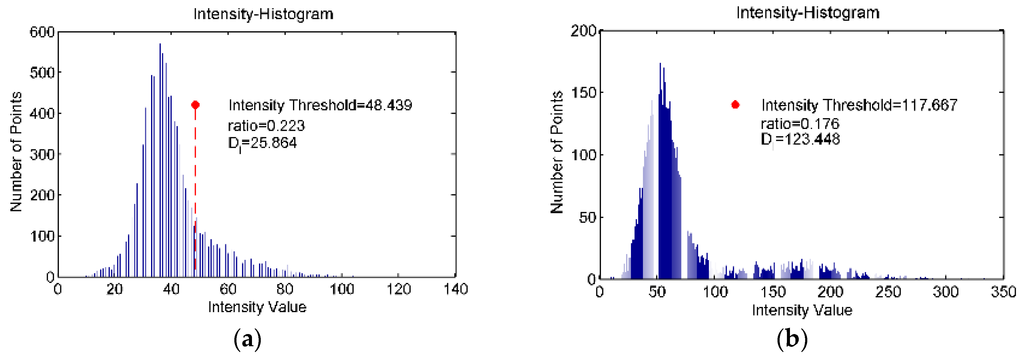
درختان کنار جاده ها، چراغ های خیابان و غیره ممکن است در استخراج نقاط دقیق سطح جاده با مشکل مواجه شوند. به عنوان مثال، زمانی که نقاط اسکن لیزری بر روی صفحه XY قرار می گیرند، تاج درختان می توانند مرزهای جاده را بپوشانند. بنابراین، ما الگوریتم تحلیل تقعر هیستوگرام پیشنهاد شده توسط روزنفلد [ 36 ] را گسترش می دهیم و از الگوریتم توسعه یافته برای انتخاب آستانه مناسب برای فیلتر ارتفاع استفاده می کنیم. این الگوریتم برای هیستوگرام های تک وجهی و دووجهی قابل اجرا است.
همانطور که در شکل 4 نشان داده شده است ، ابتدا یک هیستوگرام hs را بر اساس F ترسیم می کنیم که یکی از ویژگی های نقاط اسکن لیزری است. عرض کلاس w است و هر مستطیل i = 1 ,…, n شماره گذاری می شود . ما دو نقطه ( f 1 ، 0) و ( f n ، 0) اضافه کردیم تا منطقه hs را راحت تر و دقیق تر تعریف کنیم.
برای یک مستطیل i ، مقدار مشخصه f i مختصات X نقطه میانی ضلع بالایی باشد و h i ارتفاع باشد:
برای یافتن مقعرهای hs ابتدا بدنه محدب آن HS را می سازیم . این کوچکترین چند ضلعی محدب است که شامل ( f 1 , 0 , ( f n , 0) و ( f i , h i ) ( i = 1, 2, …, n ) وسط تمام اضلاع بالای مستطیل است. H i ارتفاع HS زمانی است که مقدار ویژگی f i باشد . عمق تقعر D i به صورت زیر تعیین می شود:
هر گونه تقعر در هیستوگرام ممکن است محل یک آستانه باشد. با این حال، همه نقاط تقعر کاندیدای خوبی نیستند. هر چه عمق تقعر عمیق تر باشد، تفاوت در مقادیر ویژگی اجسام بین هر دو طرف بزرگتر است. بنابراین، نقاطی را که D i حداکثر محلی است به عنوان کاندیدای موقعیت های آستانه T در نظر خواهیم گرفت :
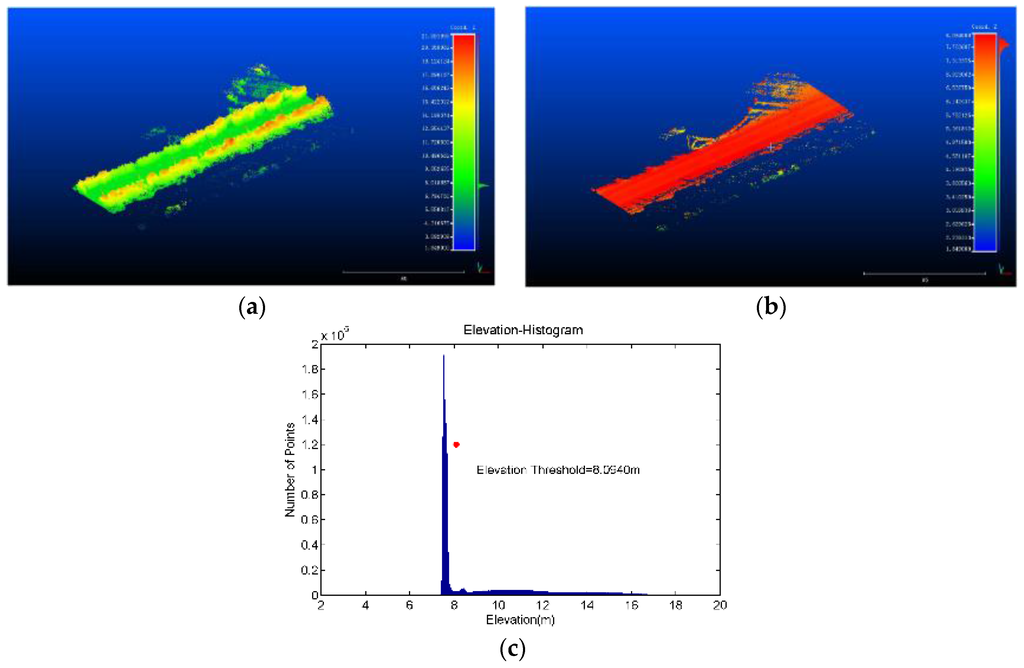
ما اطلاعات ارتفاعی ابرهای نقطه ای را به عنوان ویژگی های ویژگی برای تجزیه و تحلیل تقعر هیستوگرام در این مطالعه انتخاب می کنیم. در محیط های جاده های شهری معمولا تعداد زیادی نقاط سطح جاده وجود دارد و پراکندگی آنها متمرکز است. درختان، چراغ های خیابان و سایر اشیایی که باعث تداخل جدی در تقسیم بندی جاده ها می شوند، ارتفاع بیشتری دارند و نقاط پراکنده می شوند. بنابراین، بر اساس ویژگیهای توزیع ارتفاعی ابرهای نقطهای، نتیجه میگیریم که اوج هیستوگرام با سطح جاده مطابقت دارد و «شانهها» در سمت راست قله مربوط به اجسامی هستند که میتوانند در تقسیمبندی جادهها تداخل ایجاد کنند. همانطور که در شکل 5 ج نشان داده شده است، آستانه ممکن در “شانه” سمت راست قرار دارد. ابتدا h f را بگذاریدارتفاع مربوط به بزرگترین فرکانس باشد و h max بالاترین ارتفاع تمام نقاط باشد. سپس با تجزیه و تحلیل تقعر هیستوگرام، آستانه T را در محدوده [ h f , h max ] محاسبه کنید. در نهایت، نقاط با ارتفاع کمتر از T را فیلتر کرده و از نقاط باقیمانده برای مراحل بعدی استفاده می کنیم.
2.1.3. تقسیم بندی بر اساس منطقه در حال رشد
برای بهبود سرعت محاسبات روش پیشنهادی و اعمال الگوریتمهای پردازش تصویر، نقاط اسکن لیزری بر روی صفحه XY پیشبینی میشوند تا یک تصویر ویژگی جغرافیایی مرجع I تولید شود . مقدار خاکستری هر سلول برابر است با ارتفاع نقطه مرکزی محاسبه شده با استفاده از روش درونیابی با فاصله معکوس (IDW) [ 37 ] و نرمال سازی. سپس از روش درون یابی دو خطی برای صاف کردن تصویر استفاده می شود زیرا در برخی از سلول ها نقطه ای وجود ندارد که باعث ایجاد نویز تصویر می شود. در نهایت، تصویر ویژگی ارتفاع I به شکل زیر به یک تصویر ویژگی شیب ارتفاعی G تبدیل میشود :
از آنجایی که شیب های ارتفاع سطح جاده و مرز جاده به اندازه کافی متمایز هستند، ما از یک آستانه T G برای باینری سازی تصویر استفاده می کنیم. در تصویر دودویی شده B ، اگر مقدار پیکسل مربوطه در G بیشتر از T G باشد، مقدار پیکسل روی 1 تنظیم می شود . در غیر این صورت، روی 0 تنظیم می شود. نتیجه به صورت شکل 6 ب نشان داده شده است. برای پل زدن شکاف ها در مرزهای جاده، اتساع به تصاویر باینریزه شده اعمال می شود. شکل 6c نتایج اتساع تصویر B را با یک عنصر ساختاری 3×3 نشان می دهد و سطح جاده ناحیه سیاه رنگی است که توسط یک مرز سفید روشن احاطه شده است.
رشد منطقه ای روشی موثر برای استخراج سطح جاده در یک تصویر است. اولین قدم این است که یک نقطه از داده های مسیر را انتخاب کنید و تأیید کنید که مقدار پیکسلی که نقطه در آن قرار دارد 0 است. سپس، پیکسل را می توان به عنوان نقطه اولیه تعیین کرد. تمام پیکسل هایی که 8 به نقطه بذر متصل هستند و مقادیر آنها نیز 0 است به نقطه بذر اضافه می شوند تا یک ناحیه بزرگتر را تشکیل دهند. پیکسل های 8-متصل همسایه هر پیکسلی هستند که یکی از لبه ها یا گوشه های آنها را لمس می کند. سپس، نتیجه فرآیند رشد منطقه را با استفاده از یک عنصر ساختاری 3×3 برای جبران خطای ناشی از اتساع قبلی، گشاد می کنیم. در نهایت، ابرهای نقطه سطوح جاده بر اساس نتایج بهینه شده در حال رشد منطقه تبدیل می شوند.
2.2. استخراج علامت گذاری جاده ها
2.2.1. آستانه تطبیقی بر اساس پارتیشن بندی سطح جاده
معمولاً سطح جاده از آسفالت و بتن تشکیل شده است و هنگامی که در معرض لیزر تابشی قرار می گیرد، خواص بازتابش کم یا پراکنده از خود نشان می دهد. خط کشی های جاده، پوشش های سفید یا زرد بسیار بازتابنده ای هستند که روی سطح جاده نقاشی می شوند. اجسام با بازتاب بالاتر با سیگنال های لیزری قوی تر مطابقت دارند. بنابراین، مقدار شدت لیزر یک ویژگی کلیدی برای تشخیص علائم جاده از سطوح جاده است. با این حال، مقادیر شدت نیز تحتتاثیر زوایای فرود لیزر و فواصل بین هدف و مرکز اسکنر قرار میگیرند، که باعث میشود آستانه جهانی منفرد برای تقسیمبندی مؤثر نباشد. بنابراین، آستانه شدت تطبیقی بر اساس پارتیشن بندی سطح جاده برای حل مشکلات ناشی از شدت های غیر یکنواخت پیشنهاد شده است.
به طور کلی، هر چه از داده های مسیر دورتر باشد، شدت خط کشی های جاده کمتر می شود. موادی که بخش های مختلف جاده را تشکیل می دهند نیز به طور قابل توجهی متفاوت هستند. بنابراین، سطح جاده به مستطیل های غیر همپوشانی Rect i تقسیم می شود ، همانطور که در شکل 7 نشان داده شده است . محور X جهت مسیر وسیله نقلیه است و محور Y عمود بر محور X در صفحه افقی است. طول و عرض مستطیل به ترتیب R x و R y است . اندازه مستطیل به میزان یکنواختی شدت بستگی دارد. R x و R yبرای اطمینان از توزیع یکنواخت شدت در هر مستطیل، باید زمانی که شدت به طور نابرابرتر توزیع می شود، کوچکتر تنظیم شود.
دو احتمال در مورد تعداد انواع نقطه در یک مستطیل وجود دارد: (الف) فقط یک نوع، به عنوان مثال، نقاط سطح جاده، یا (ب) دو نوع، به عنوان مثال، نقاط سطح جاده و نقاط علامت گذاری جاده. الگوریتم Otsu [ 38 ] ابتدا برای یافتن آستانه شدت بهینه در هر مستطیل استفاده می شود. سپس این دو مورد بر اساس نتایج آستانه جداسازی می شوند.
مجموعه نقطه P A = { p 1 , p 2 , …, p m } نشان دهنده نقاطی است که شدت آنها بزرگتر از آستانه است و P B = { p 1 , p 2 , …, p m } نشان دهنده نقاط باقی مانده در مستطیل مختصات سه بعدی p i ( xi ، y i ، z i ) است و مقدار شدت آن I i است .
برای مورد (الف)، نقاط P A و P B هر دو نقاط سطح جاده هستند. برای مورد (b)، نقاط P A نقاط علامت گذاری جاده هستند و نقاط P B نقاط سطح جاده هستند. فاصله مراکز خوشه بین P A و P B در مورد (b) بسیار بزرگتر از مورد (a) است. این فاصله d I به صورت زیر محاسبه می شود:
نسبت تعداد نقاط بین P A و P B نیز یک عنصر مهم برای قضاوت پرونده ها است. در شکل 7 ، Rect 1 و Rect 2 نمونه هایی از حالت (الف) و مورد (ب) هستند. نتایج آستانه آنها در شکل 8 نشان داده شده است . در مورد (ب)، تعداد نقاط در P A به طور قابل ملاحظه ای بزرگتر از P B است ، که منجر به نسبت بالایی می شود. نسبت به صورت زیر تعریف می شود:
با توجه به تجزیه و تحلیل فوق، با استفاده از فرمول زیر می توان این دو مورد را تشخیص داد:
که در آن T d و Tr به ترتیب آستانه های فاصله خوشه-مرکز و نسبت تعداد نقاط هستند .
در نهایت، برای مورد (ب)، تمام نقاط در P A به عنوان نتایج درشت به دست آمده از استخراج خط کشی جاده محفوظ است.
2.2.2. فیلتر کردن درجه پراکندگی
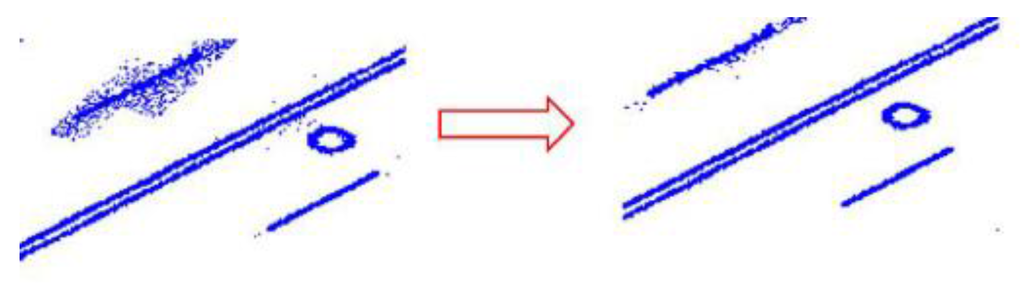
برخی از قسمتهای سطوح جادهها دارای خواص مواد مشابهی با خطکشی جاده هستند که باعث ایجاد نویز در نتایج استخراج درشت میشود، همانطور که در شکل 9 نشان داده شده است . نقاط علامت گذاری جاده بیشتر از سر و صدا متمرکز هستند. بنابراین، پیشنهاد می شود نویز با توجه به تفاوت در درجه پراکندگی حذف شود.
درجه پراکندگی D p یک نقطه p ( x , y , z ) به صورت زیر تعریف می شود:
که در آن N p تعداد نقاط محله محلی را نشان می دهد.
با حذف نقاطی که درجه پراکندگی آنها بزرگتر از آستانه T D است ، می توان خط کشی های جاده را به طور دقیق استخراج کرد.
2.3. تشخیص و ساخت گذرگاه گورخر
2.3.1. مدل گذرگاه گورخر
گذرگاه گورخر منطقه ای است که شامل گروهی از نوارهای سفید پهن است که روی جاده نقاشی شده است. همانطور که در شکل 10 نشان داده شده است ، مدل ما از تقاطع گورخر شامل چهار عنصر زیر است: L 1 و L 2 به ترتیب موقعیت شروع و پایان را تعریف می کنند. V r جهت خط مرکزی جاده است، که همچنین جهت حرکت وسایل نقلیه است. و V z جهت توزیع گذرگاه گورخر است که عابران پیاده را برای عبور ایمن از جاده راهنمایی می کند.
2.3.2. تشخیص راه راه گورخر
استانداردهای طراحی در اکثر کشورها مقرراتی را در مورد اندازه و شکل دقیق خط کشی جاده ها ارائه می کنند. تشخیص انواع خط کشی های جاده بر اساس اندازه ها و شکل های مختلف آنها سودمند است. نوار در واقع یک مستطیل با اندازه ثابت است. بنابراین، دو عامل وجود دارد که میتوانیم از آنها برای تشخیص نوارها استفاده کنیم: (الف) ویژگیهای مستطیلی و (ب) طول ثابت L z و عرض W z .
برای خوشهبندی نقاط علامتگذاری جاده همسایه، تصاویر ویژگی شدت تبدیل شده از ابرهای نقطهای باینریزه میشوند و به دنبال آن برچسبگذاری 8 جزء متصل میشود. برای هر ناحیه متصل، یک بیضی با ممان های دوم مشابه ناحیه 8 متصل محاسبه می شود. e خارج از مرکز بیضی است و مقدار آن از 0 تا 1 متغیر است. بر اساس تجربه، مناطقی که مقادیر e آنها بزرگتر از 0.99 است، نوارهای کاندید هستند و نقاط مربوطه به عنوان مجموعه نقطه P = { p 1 , p 2 , …, p k } نشان داده می شوند.
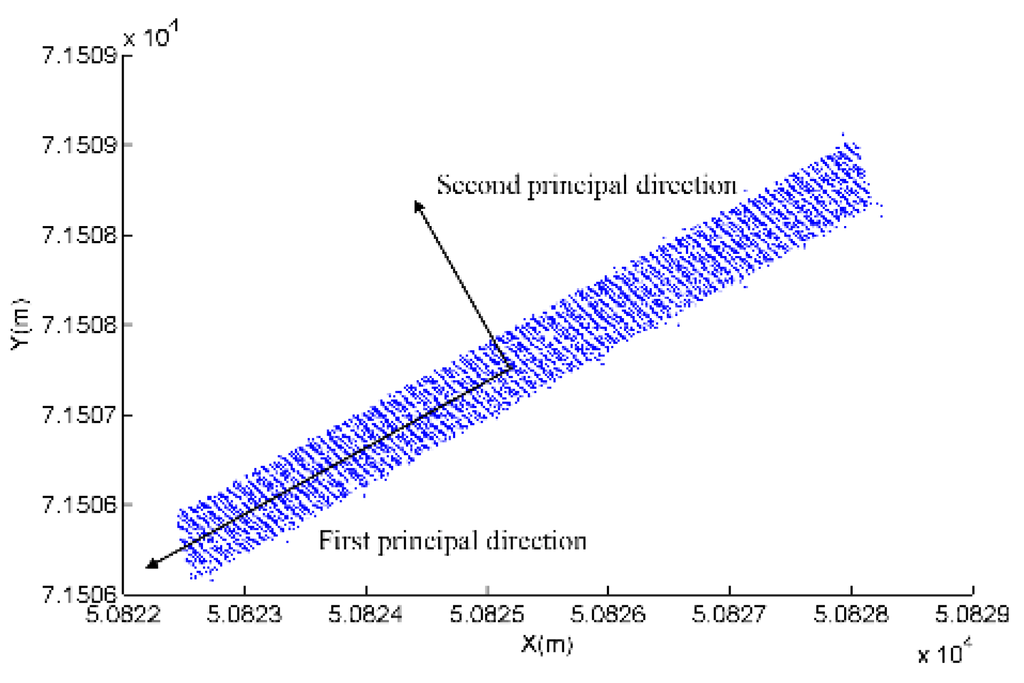
برای محاسبه طول و عرض نوارهای کاندید، روش تحلیل مؤلفه اصلی (PCA) برای قضاوت در جهت توزیع اصلی نقاط در P در صفحه XY انجام میشود.
برای تمام نقاط P ، همبستگی بین x i و y i را می توان از طریق واریانس آنها به صورت زیر تعیین کرد:
که در آن x و y مقادیر متوسط x i و y i هستند .
ماتریس کوواریانس C را می توان با استفاده از رابطه (10) ایجاد کرد:
همانطور که در شکل 11 نشان داده شده است ، از طریق تجزیه مقدار ویژه (EVD) C ، بردار ویژه مرتبط با مقدار ویژه بزرگتر V1 به عنوان اولین جهت اصلی، که موازی با ضلع بلند مستطیل است، تعریف می شود . بردار ویژه مرتبط با مقدار ویژه کوچکتر V 2 به عنوان جهت اصلی دوم تعریف می شود که موازی با ضلع کوتاه مستطیل است. ماتریس های یک بعدی M 1 و M 2 با طرح مختصات صفحه تمام نقاط به ترتیب به V 1 و V 2 ایجاد می شوند . سپس، طول Lz و عرض W z منطقه را می توان به صورت زیر محاسبه کرد:
مناطقی که طول و عرض آنها مطابق با استانداردهای طراحی است را می توان به عنوان نوارهای گورخری رزرو کرد. با در نظر گرفتن سایش در خط کشی جاده و خطاهای محاسباتی در موارد واقعی، محدوده مقادیر L z و W z به صورت زیر تنظیم می شود:
که در آن L s و W s طول و عرض استاندارد نوارهای گورخر است.
2.3.3. بازسازی گذرگاه های گورخر
مرکز تمام نوارها در یک تقاطع گورخر در امتداد یک خط مستقیم قرار دارند. این خط در محور مرکزی گذرگاه گورخر یافت می شود که برای بازسازی منطقه مهم است.
اجماع نمونه تصادفی (RANSAC) [ 39 ] یک الگوریتم تکراری موثر برای برازش مدل ریاضی، مانند برازش خطی است. با تنظیم تعداد تکرار n R و آستانه باقیمانده TR ، پارامترهای مدل بهینه را می توان از مجموعه ای از داده های مشاهده شده حاوی نویز تخمین زد . این برای حل مشکل اتصال محورهای مرکزی تقاطع گورخر در این مقاله اتخاذ شده است.
ابتدا مختصات تمام مرکزهای راه راه را در صفحه XY محاسبه می کنیم. سپس الگوریتم RANSAC بر روی این مرکزها اعمال می شود. برای اطمینان از صحت نتایج، باید حداقل از سه نقطه برای تطبیق با مدل خطی برآورد شده استفاده شود. در نهایت، ما مستقیماً برخی از اطلاعات مهم را به دست میآوریم: (الف) تعداد گذرگاههای گورخر: تعداد تکرارها. (ب) محور مرکزی گذرگاه های گورخر: خطوط نصب شده توسط RANSAC. و (ج) راه راه متعلق به همان تقاطع گورخر. جهت توزیع V z با جهت محور مرکزی یکسان است. جهت خط مرکزی جاده V r با میانگین گرفتن اولین جهت اصلی نوارها در یک تقاطع گورخر محاسبه می شود. L 1و L 2 با ترجمه محور مرکزی در امتداد Vr به دست می آیند ، جایی که فاصله انتقال ± Ls /2 است. این کار شناسایی و بازسازی گذرگاه های گورخر را تکمیل می کند.
3. نتایج و بحث
ابرهای نقطه ای مورد استفاده در این آزمایش توسط یک سیستم نقشه برداری موبایل Optech Lynx که از دو اسکنر لیزری، یک گیرنده GPS و یک واحد اندازه گیری اینرسی تشکیل شده است، گرفته شد. داده های اصلی در سیستم مختصات WGS-84 آورده شده است. سپس داده ها از مختصات طول و عرض جغرافیایی به مختصات مسطح X و Y ریاضی با استفاده از طرح ریزی گاوس تبدیل می شوند. منطقه بررسی در گوانگگو، بخشی از شهر ووهان، که یک شهر بزرگ در مرکز چین است، است.
شکل 12 سه مجموعه داده انتخاب شده برای ارزیابی عملکرد روش پیشنهادی را نشان می دهد. شکل شامل پوشش گیاهی (به عنوان مثال، درختان و بوته ها)، لامپ های خیابان، خطوط برق، و اتومبیل در این مناطق است. جادههای این مجموعه دادهها شامل بخشهای مستقیم، بخشهای منحنی و چهارراه است. اطلاعات دقیق، از جمله طول جاده و تعداد نقاط، در جدول 1 ارائه شده است .
3.1. تقسیم بندی سطوح جاده ها
برای تقسیم داده های تجربی به تعدادی بلوک، d = 50 m را در مجموعه داده 2 انتخاب کردیم. در دو مجموعه داده دیگر، ما از d = 30 m استفاده کردیم زیرا منحنی ها و رمپ های بیشتری وجود دارد. برای هر بلوک از آنالیز تقعر هیستوگرام برای به دست آوردن آستانه ارتفاع استفاده شد. سپس، به دنبال فیلتر ارتفاع، ابرهای نقطه ای به تصاویر ویژگی شیب ارتفاعی تبدیل شدند. اندازه شبکه یک پارامتر حیاتی در تولید تصویر است. وقتی اندازه خیلی کوچک است، فقط چند نقطه، یا احتمالاً هیچ نقطهای در داخل شبکهها قرار نمیگیرد، در حالی که اندازه بزرگ ممکن است منجر به کیفیت پایین تصویر شود. با در نظر گرفتن مجموعه داده 1 به عنوان مثال، بلوکی از داده ها برای تولید تصاویر شیب ارتفاعی با اندازه های شبکه متفاوت 0.05، 0.07، 0.09 و 0.11 متر انتخاب شد. شکل 13نتایج مقایسه را ارائه می دهد. بازرسی بصری نشان میدهد که نقاط نویز کمی روی سطح جاده وجود دارد و وقتی اندازه شبکه 0.09 متر است، جزئیات واضح هستند. بنابراین، این مقدار در آزمایش اعمال شد. اندازه شبکه مورد استفاده در مجموعه داده 2 و 3 به ترتیب به 0.12 متر و 0.10 متر تنظیم شد.
برای دوتایی کردن تصاویر ارتفاع- گرادیان، یک آستانه باید تعیین شود. مقادیر خاکستری سطوح جاده معمولاً از 0 تا 0.005 متغیر است و مقادیر خاکستری مرزهای جاده تقریباً 0.015 است. بنابراین، هر مقدار بین 0.005 و 0.015 را می توان به عنوان آستانه تعیین کرد و ما 0.005 را انتخاب کردیم.
در نهایت، ما سطوح جاده را با استفاده از روش رشد منطقه تقسیم بندی کردیم. سپس، نقاط سه بعدی مرتبط با سطوح جاده را می توان به راحتی استخراج کرد، همانطور که در شکل 14 نشان داده شده است . نمای نزدیک در مستطیل های مشکی نشان می دهد که سطوح جاده اساساً دقیق و کامل استخراج شده اند.
3.2. استخراج خط کشی جاده ها
چندین پارامتر و مقادیر مورد استفاده در استخراج خط کشی جاده ها در جدول 2 آورده شده است . آنها عمدتاً از طریق مجموعه ای از آزمون ها یا بر اساس دانش قبلی انتخاب شدند. سپس خط کشی های جاده به طور مستقیم با آستانه تطبیقی و فیلتر درجه پراکندگی از نقاط سطح جاده استخراج شد. همه انواع خط کشی های جاده را می توان به خوبی استخراج کرد. با این حال، چند خط کشی جاده توسط خودروها و عابران پیاده ساییده شد که منجر به ناقص بودن برخی از نتایج استخراج شد. شکل 15 بخشی از خط کشی های استخراج شده از راه را نشان می دهد که شامل خطوط توپر، خطوط نقطه چین، علامت های فلش و علامت های الماسی می شود.
3.3. شناسایی و بازسازی گذرگاه های گورخر
طول استاندارد L s و عرض W s نوارهای گورخر به ترتیب 6 متر و 0.4 متر در سه مجموعه داده است که استانداردهای طراحی گذرگاه های گورخر در چین را برآورده می کند. پس از شناسایی نوارها بر اساس استانداردهای فوق، الگوریتم RANSAC بر روی مرکز راه راه ها با n R 5000 و T R 0.25 برای به دست آوردن اطلاعات جامع در مورد مناطق عبور گورخر اعمال شد.
یک مطالعه تطبیقی برای مقایسه روش تشخیص تقاطع گورخر پیشنهادی ما با روش اخیرا منتشر شده انجام شد: روش ریویرو [ 34 ]. همانطور که در جدول 3 ذکر شده است، در مجموع یازده تقاطع گورخر با نرخ شناسایی 90.91٪ با روش ما شناسایی شد که از روش دیگر بهتر است. همانطور که در شکل 16 نشان داده شده است، یک گذرگاه گورخر به دلیل انعکاس کم خط کشی های جاده ناشی از ساییدگی جدی، که باعث کاهش کامل استخراج خط کشی جاده می شود، شناسایی نشد .
برای ارزیابی کمی بیشتر عملکرد روش ما، چهار معیار برای هر تقاطع گورخر بر اساس نتایج استخراج دستی محاسبه شد. θ z و θ r به ترتیب نشان دهنده انحراف زاویه جهت توزیع یک گذرگاه گورخر و جهت خط مرکزی جاده هستند. کامل بودن r برای توصیف کامل بودن مناطق عبور گورخر شناسایی شده و صحت p برای نشان دادن چند درصد از مناطق عبور گورخر شناسایی شده معتبر هستند استفاده می شود. r و p به صورت زیر تعریف می شوند:
که در آن TP ، AP و VP تعداد نقاط سطح جاده متعلق به (1) مناطق عبور گورخر به درستی شناسایی شده با استفاده از روش پیشنهادی هستند. (2) مناطق عبور گورخر با استفاده از تفسیر بصری دستی جمع آوری شده است. و (3) کل مناطق عبور گورخر شناسایی شده با استفاده از روش پیشنهادی، به ترتیب.
همانطور که توسط نتایج ارزیابی کیفیت در جدول 4 نشان داده شده است، کامل بودن و صحت تقاطع های گورخری شناسایی شده هر دو بیشتر از 90٪ است ، مقدار θz بیشتر از 2.5 درجه نیست، و حداکثر مقدار θr 1.2 درجه است. به طور خلاصه، روش پیشنهادی ما عملکرد خوبی را در شناسایی و بازسازی گذرگاههای گورخر نشان میدهد.
4. نتیجه گیری
در این مقاله، ما یک روش موثر برای شناسایی و بازسازی گذرگاههای گورخر با استفاده از دادههای اسکن لیزری سیار پیشنهاد کردهایم. روش پیشنهادی ابتدا ابرهای نقطهای را به تصاویر گرادیان ارتفاعی تبدیل میکند و متعاقباً بخشبندی سطح جادهای مبتنی بر رشد منطقه را اعمال میکند. دوم، نقاط علامتگذاری جاده با آستانه شدت تطبیقی بر اساس تقسیمبندی سطح جاده و فیلتر درجه پراکندگی استخراج میشوند. در نهایت، مناطق عبور گورخر با توجه به ویژگی های هندسی شناسایی و بازسازی می شوند.
سه مجموعه داده به دست آمده توسط یک سیستم نقشه برداری موبایل Optech Lynx برای تأیید روش تشخیص و بازسازی تقاطع گورخر ما استفاده شد. نتایج تجربی نشان می دهد که روش پیشنهادی به خوبی عمل می کند و مقادیر کاملی و صحت بالایی را به دست می آورد. این آزمایش سه مزیت اصلی روش را نشان داده است: (1) روش حتی زمانی که نقاط تقاطع گورخر ناقص هستند مؤثر است. (2) این روش زمانی می تواند مؤثر باشد که جهت توزیع گذرگاه های گورخر و خطوط مرکزی جاده در زوایای دلخواه باشد. و (3) اطلاعات جامع تر در مورد مناطق عبور گورخر، مانند وسعت منطقه، به دست آمده است.
این یافتههای تحقیقاتی میتواند به یک رویکرد سریعتر، مقرونبهصرفهتر و جامعتر برای مدیریت ترافیک کمک کند و حداکثر شرایط ایمنی را برای کاربران جاده تضمین کند. با این حال، روش ما در حال حاضر فقط می تواند برای پس پردازش به جای استفاده بلادرنگ استفاده شود، زیرا برخی از پارامترها باید بر اساس دانش قبلی یا مجموعه ای از تست ها انتخاب شوند. در آینده، مطالعه بیشتری در مورد الگوریتم انتخاب پارامترهای بهینه به صورت خودکار انجام خواهیم داد. علاوه بر این، افزایش کارایی محاسباتی روش ما نیز مهم است، زیرا اگر بخواهیم اطلاعات دقیق تری در مورد اشیاء شهری به دست آوریم، ابرهای نقطه ای با وضوح بهتر و چگالی بالاتر مورد نیاز هستند.












بدون نظر