1. معرفی
ساختن نقشه های شبکه جاده ای یک مشکل اساسی در حمل و نقل هوشمند و مدیریت شهری است زیرا نقشه های دقیق برای خدمات حمل و نقل سیستم های شهری مدرن حیاتی هستند. در سالهای اخیر، روشها و کاربردهای پیچیدهتر، مجموعه دادههای نقشه شبکه جادهای را تکمیل کردهاند که بهویژه از فناوریهای فضایی مانند سنجش از راه دور، نقشهبرداری مشارکتی (همچنین به عنوان اطلاعات جغرافیایی داوطلبانه شناخته میشود) و GPS یکپارچه شده در دستگاههای تلفن همراه سود میبرند. با استفاده از این تکنیکها، محققان و کارکنان میتوانند نقشههای اطلاعات دیجیتال شهری را از طریق جمعآوری نسبتاً کم هزینه استنباط کنند و محققان در تلاشند تا پوشش شبکههای جادهای را به مناطقی با علاقه تجاری کمتر گسترش دهند. با این حال،
در این مقاله، ما یک راهحل جدید برای بازرسی و بهروزرسانی یک شبکه جادهای موجود با استفاده از اطلاعات مسیر بالقوه از مسیرهای وسایل نقلیه غیر تخصصی را بررسی میکنیم. این روش از یک فرآیند مارپیچ “بازرسی >> تجزیه و تحلیل >> استخراج >> به روز رسانی پیروی می کند. این الگوریتم از یک الگوریتم مبتنی بر HMM (مدل مارکوف پنهان) شروع می شود که به طور خودکار بخش های جاده مشکل را تشخیص می دهد (به عنوان PRS نشان داده می شود).) و ویژگی های آنها را تجزیه و تحلیل می کند (به عنوان مثال، فقدان بخش های جاده یا خطاهای توپولوژیکی) و سپس به استخراج بخش های جاده از مسیرهای چندگانه در بافت محلی مکان هایی که فرآیند تشخیص شکست خورده اند، ادامه می دهد و در نهایت شبکه اصلی جاده را در منطقه محلی به روز می کند. با توجه به دانش نویسندگان، این مطالعه اولین تلاش برای کشف روشی است که مشکلات را در یک شبکه جادهای موجود شناسایی میکند و شبکه را با استفاده از مسیرهای وسیله نقلیه GPS در یک فرآیند پیشرونده مارپیچی به روز میکند.
1.1. اکتساب داده های مسیر
رویکردهای نوپا برای جمعآوری دادههای ردیابی، تقویت عمدهای برای در دسترس بودن مسیرها بود و به طور بالقوه میتوانست همه را به یک ارائهدهنده داده یا نقشهساز با استفاده از دستگاههای تلفن همراه با فناوریهای موقعیتیابی و با افزایش LBSN (شبکههای اجتماعی مبتنی بر مکان، [1، 2] ) تبدیل کند . اکثر وبسایتهای LBSN مجموعهای از ابزارها را در اختیار افراد دستگاههای تلفن همراه مجهز به GPS قرار میدهند که با آنها میتوانند ردیابیهای GPS از جایی که بودهاند را به روشی ساده جمعآوری کرده و به اشتراک بگذارند. به عنوان مثال، داده های ردیابی در OSM به طور پیوسته در اندازه در حال افزایش است و در حال حاضر به 2.6 تریلیون امتیاز می رسد به دلیل تعداد زیادی از داوطلبان در سراسر جهان که در حال کمک به داده های مسیر و ساختن نقشه ها هستند [3 ]]. بنابراین، تولید اطلاعات جغرافیایی از دادههای مسیر به تدریج به یک موضوع تحقیقاتی داغ تبدیل شده است، اگرچه هنوز بر سطح خاصی از مداخله انسانی متکی است.
1.2. تولید نقشه راه با مسیرها
با توجه به گران بودن نقشه برداری میدانی و کار فشرده پس از پردازش روش های سنتی، تلاش قابل توجهی برای توسعه ابزارهای جدید برای تولید نقشه های جدید و به روز رسانی نقشه های قدیمی صورت گرفته است. سنجش از دور و GPS دو گزینه اصلی در نظر گرفته می شوند. روشهای استخراج جاده مبتنی بر سنجش از دور را میتوان به سه دسته سازماندهی کرد: (1) روشهای استخراج جاده مبتنی بر پیکسل، که تفاوتهای بین «جادهها» و «پسزمینه» را در همسایگی یک پیکسل هدف تحلیل میکنند (به عنوان مثال، F. Porikli 2003 [ 4 ]، Li X 2010 [ 5 ] و C. Unsalan و همکاران 2012 [ 6 ]). (2) روشهای استخراج جاده مبتنی بر منطقه، که دادهها را بر اساس ویژگیهای یکسان به چندین منطقه تقسیم میکند و سپس اطلاعات جاده را استخراج میکند (به عنوان مثال، P. Doucette و همکاران 2001 [7 ]، W. Shi 2014 [ 8 ]؛ و (3) روشهای استخراج مبتنی بر دانش، که از ترکیبی از دادهها و مقررات چند منبعی برای استخراج اطلاعات جادهها استفاده میکنند (به عنوان مثال، SA Mumtaz و همکاران 2008 [9]، Fang Lina و همکاران 2013 [ 10 ]). نگرانی حتی بیشتر، تلاش برای استخراج اطلاعات جاده از دادههای مسیر GPS است که مجموعههای غنیتری از دادههای مکانی-زمانی را فراهم میکند که دستکاری دادهها را برای استخراج اطلاعات مفید، مانند مکانهای مورد علاقه و توالی سفر برای محققان آسانتر میکند [11] . ]، رفتار انسان [ 12 ]، ارزیابی و پیش بینی ترافیک [ 13 ]، زمان سفر [ 14 ]، و هندسه واقعی شبکه جاده [ 15 ]، 16 ].
تلاشها برای بازسازی شبکههای جادهای از دادههای مسیر را میتوان به دو دسته طبقهبندی کرد: تولید نقشههای راه جدید و اصلاح نقشههای راه موجود [ 17 ]. تولید نقشه های راه جدید شامل محاسبه یک نقشه راه است که تمام مسیرها را در یک مجموعه داده مسیر معین نشان می دهد [ 16 ]. ادلکمپ و همکاران [ 18 ] و شرودل و همکاران. [ 19 ] خطوط مرکزی جاده را با شناسایی بخش های مشترک چندین مسیر GPS تخمین زد. ورال و همکاران [ 20 ] یک مدل نقشه راه ساده پیشنهاد کرد و یک ساختار جاده را با خوشهبندی و پیوند دادههای مسیر ساخت. چن و چنگ [ 21 ] و شی و همکاران. [ 22] تکنیکهای پردازش تصویر را برای تولید شبکههای جادهای از مسیرها بررسی کرد. کائو و کروم [ 23 ] از شبیهسازیهای جاذبه فیزیکی برای تبدیل ردیابیهای خام GPS به یک شبکه جادهای قابل مسیریابی استفاده کردند و فتحی و کروم [ 24 ] رویکردی را بر اساس یافتن تقاطعهای جادهای به جای تعریف هندسه راه معرفی کردند. پیاوان کاسمسوپاکورن و همکاران. [ 25 ] یک تکنیک استخراج مسیر عابر پیاده را برای تولید بخشهای مسیر عابر پیاده توسعه داد، اما این روش نسبت به دادههای بهدستآمده از رانندگی در برابر مشکل چند مسیری حساستر بود. J. Biagioni و همکاران. [ 26 ] یک فرآیند ترکیبی برای استنتاج خودکار نقشههای راه از مجموعههای بزرگ مسیرها طراحی کرد، که در برابر نابرابری در پوشش و نویز قابل تحمل بود. S. Karagiorgou et al. [27 ] روشی را برای تبدیل مسیرها به لایه های شبکه جاده ای سلسله مراتبی و ترکیب آنها به یک شبکه جاده ای کامل پیشنهاد کرد.
اصلاح نقشه های راه موجود راهی برای تشخیص تغییرات جاده، به روز رسانی هندسه و در نهایت بهبود نقشه های اصلی با اطلاعات ویژگی های اضافی استخراج شده از داده های مسیر ایجاد می کند. راجرز و همکاران [ 28 ] یک روش میانگین وزنی را برای بهبود خطوط مرکزی خطوط هدف شبکههای جادهای موجود با استفاده از مسیرهای GPS با دقت بالا پیشنهاد کرد. گوو و همکاران [ 15 ] از رویکرد تقریب حداقل مربعات برای ایجاد نقاط مشخصه جاده و تشخیص تغییرات جاده استفاده کرد و سعی کرد بخشهای جاده موجود را با استفاده از برازش منحنی اسپلاین بهروزرسانی کند. لیجوان ژانگ و همکاران [ 29] نقشههای راه موجود با مسیرهای متعدد را بهطور تدریجی بهبود داد، که جادههای جدید را با استفاده از فاصله تا جاده، جهت، زاویه بین مسیرها و خطوط مرکزی جاده قبلی از مسیرهای GPS جدید شناسایی میکرد. جون لی و همکاران [ 30 ] یک روش استخراج افزایشی شبکه راه را پیشنهاد کرد که به تدریج نقاط مسیر را از طریق فرآیندهای اضافه و اصلاح در شبکه جاده ادغام می کند.
مزیت اصلی اولی مستقیم بودن است، زیرا استخراج مستقیم هندسه جاده ها از داده های مسیر برای محققان و نقشه نگاران نسبتاً ساده است. با این حال، فرآیند تولید نقشههای راه جدید از دادههای GPS جمعآوریشده در حال حاضر فاقد انعطافپذیری است—شما باید هندسه را برای هر بخش جاده بازسازی کنید، و اگر جادهها تغییر کردند، باید دادههای GPS را دوباره جمعآوری کنید و شبکه را دوباره محاسبه کنید. چنین رویکردهایی منابع محاسباتی را در مناطقی که هیچ تغییری وجود ندارد، هدر می دهد. دومی مزیت استفاده موثر از نقشه های راه موجود را دارد که به به روز رسانی شبکه در مراحل کوچک کمک می کند. مطالعات موجود در مورد پالایش نقشههای راه موجود، به شدت بر مداخله انسان تکیه دارد، به ویژه برای نشان دادن اینکه کدام مناطق شبکه باید به روز شوند.
1.3. مدل مارکوف پنهان
یک مدل مارکوف پنهان [ 31 ] یک فرآیند مارکوف را با حالتهای پنهان (مشاهده نشده) مدل میکند، که میتواند به عنوان سادهترین شبکه بیزی پویا ارائه شود. برخلاف یک زنجیره مارکوف معمولی، حالات در یک HMM مستقیماً قابل مشاهده نیستند، اما خروجیهایی که با حالتها تخصیص داده شدهاند، قابل مشاهده هستند. انتقال بین حالت ها در یک HMM با احتمالات خاصی اتفاق می افتد و هر حالت دارای توزیع احتمال انتشار بر روی خروجی های ممکن است. بنابراین، می توان آن را تعمیم یک مدل مخلوط در نظر گرفت، که در آن متغیرهای پنهان، که مؤلفه مخلوطی را که برای هر مشاهده انتخاب می شود کنترل می کنند، به جای اینکه مستقل از یکدیگر باشند، از طریق یک فرآیند مارکوف به هم مرتبط هستند [32] .]. مدلهای پنهان مارکوف به دلیل کاربردهایشان در تشخیص الگوی زمانی (مثلاً تشخیص گفتار و زبان طبیعی) و برنامهریزی پویا (مثلاً برنامهریزی مسیر) شناخته شدهاند. HMM اخیراً برای تطبیق نقشه برای بازیابی مسیر واقعی یک ردیابی GPS در یک شبکه جادهای، یعنی یافتن محتملترین توالی انتقال بین بخشهای جاده (حالتها) که یک مسیر GPS (توالی مشاهدات) ایجاد میکنند، معرفی شده است. به عنوان مثال، نیوزون و همکاران. [ 32 ] یک الگوریتم مبتنی بر HMM را برای شناسایی محتملترین مسیر جادهای که توسط یک مسیر معین نشان داده میشود، ایجاد کرد که هم از نظر هندسی پر سر و صدا و هم از نظر زمانی پراکنده است. Szwed و همکاران [ 33] یک الگوریتم تطبیق نقشه افزایشی را برای توسعه خدمات بلادرنگ، مانند ردیابی خودرو و تخمین ترافیک، که مدل HMM را برای هر مسیر ورودی بهروزرسانی میکند، پیشنهاد کرد. این برنامههای تطبیق نقشه مبتنی بر HMM ما را برانگیخت تا یک روش مبتنی بر HMM را برای شناسایی مکانهایی طراحی کنیم که بخشهای جاده باید در یک شبکه جادهای به روز شوند.
روش پیشنهادی ما از تحقیقات ذکر شده در بالا الهام گرفته شده است. ما به سه موضوع خاص پرداختیم که در کارهای مرتبط قبلی به آنها پرداخته نشده است: (1) نیاز به یک استراتژی انعطافپذیر که حملات جراحی را برای بهروزرسانی شبکههای جادهای مدیریت میکند. (ب) یک الگوریتم تشخیص جدید که مشکلات را در داخل شبکه جادهها بدون محاسبات هندسی مکانیابی میکند، در حالی که در کارهای قبلی مشکلات در داخل شبکه جادهها تنها با مقایسه جادههای موجود و بخشهای جاده تولید شده قابل شناسایی بودند. و (iii) روشی برای ترمیم بخش های جاده مشکل دار در مقیاس محلی. به طور خاص، ما یک استراتژی تجدید مارپیچی را برای اصلاح دادههای نقشه راه موجود با استفاده از دادههای مسیر پیشنهاد میکنیم، جایی که مشکلات بخش جاده شناسایی و قرار میگیرند و سپس با استفاده از هندسه استخراجشده از دادههای مسیر بهروزرسانی میشوند. تشخیص مشکلات در شبکه های جاده ای با مقدار کمی از داده های مسیر، چالش برانگیز است. از آنجا که محاسبات مبتنی بر ویژگیهای هندسی مسیرها و بخشهای جادهای نمیتوانند مشکلات موجود در شبکههای جادهای را به طور مؤثر هدفگیری کنند، لازم است زمان را به عنوان یک عامل اضافی که وضعیت واقعی را منعکس میکند، لحاظ کنیم، که نیازمند توسعه یک الگوریتم جدید برای شناسایی بخشهای مشکلدار جاده است. .
به طور خلاصه، سهم این مقاله سه جانبه است. ابتدا، یک فرآیند پیشرونده مارپیچ از “بازرسی >> تجزیه و تحلیل >> استخراج >> به روز رسانی” برای بررسی مشکلات در ناحیه محلی یک شبکه جاده ای در هر پیچ پیشنهاد شده است، که مانع از افتادن کار ما به محاسبات سنگین، در یک محدوده وسیع می شود. مقیاس، به روز رسانی هندسه شبکه راه. در مقابل، بیشتر تحقیقات مرتبط موجود از دادههای کامل GPS خام برای استخراج هندسه جادهها استفاده میکنند و سپس شبکه را بر اساس مقایسه بین جادههای موجود و جادههای تولید شده به روز میکنند. این منجر به هدر رفتن منابع محاسباتی و کاهش عملکرد می شود. دوم، یک PRS مبتنی بر HMMالگوریتم تشخیص برای شناسایی و مکان یابی بخش های جاده مشکل دار در طول مسیر یک مسیر معین طراحی شده است. سوم، ما محله مشکل را پیشنهاد کردیم، که ما را قادر ساخت بهروزرسانی بعدی را در محلههای PRS ( ها) توزیع کنیم، کار محاسباتی تولید هندسه بخشهای جاده را از دادههای مسیر جزئی و بهروزرسانی در مقیاس محلی کاهش داد. ما همچنین کار خود را بر اساس دادههای دقیق شبکه جاده و مسیر آزمایش کردیم، که نشان داد میتواند بخشهای جاده مشکلدار در یک شبکه جادهای را شناسایی کند و بخشهای جاده را در مقیاس محلی بهروزرسانی کند. علاوه بر این، با روشهای موجود در این مقاله، نقشهنگاران میتوانند به سرعت دادههای شبکه راه محلی را در طول یک مسیر خاص بازرسی و به روز کنند.
ساختار این مقاله بدین شرح است. بخش 2 بازرسی مارپیچی و استراتژی تجدید را مرور می کند. بخش 3 HMM برای تشخیص PRS و الگوریتم تشخیص مبتنی بر HMM را توضیح می دهد. بخش 4 محله PRS را معرفی می کند و روشی را برای تعیین هندسه بخش جاده بر اساس مسیرهای چندگانه ارائه می دهد. بخش 5 آزمایشی را بر اساس داده های واقعی همراه با معیارهای ارزیابی، نتایج و بحث ارائه می دهد. نتیجه گیری و مطالعات آتی در بخش 6 مورد بحث قرار می گیرد .
2. بازرسی مارپیچی و استراتژی تجدید
انگیزه کار ما ایده توسعه رویکردی بود که میتوان از آن برای صاف کردن استثناها در طول مسیرهای منفرد خودرو استفاده کرد. این استثنائات ما را بر روی مشکلات دادههای شبکه جادهای، مانند خطاهای توپولوژیکی و کمبودهای بخش جاده، متمرکز کرد. از آنجایی که مجموعه ای از داده های مسیر ذاتاً شامل اطلاعات بیشتری نسبت به توالی نقاط مکانی و زمانی است، می توانیم هندسه بخش های جاده را بازسازی کنیم. با در نظر گرفتن این موضوع، اولین گام در این مقاله طراحی یک استراتژی به روز رسانی مارپیچ رو به بالا است که به ما امکان می دهد داده های شبکه جاده را به دنبال فرآیند پیشرونده “بازرسی >> تجزیه و تحلیل >> استخراج >> به روز رسانی تجدید کنیم. چنین استراتژی باید به صورت بازگشتی افزایشی باشد، یعنی: به روز رسانی اطلاعات شبکه های جاده های محلی با ظهور مشکلات جدید، زیرا بازرسی شبکه های جاده ای جزئی با یک مسیر معین نسبتاً انعطاف پذیر است. چالش اصلی تلاش ما این است که همه داده ها را در یک شبکه جاده ای پردازش کنیم زیرا حجم عظیمی از داده های ردیابی را پوشش می دهد. استراتژی ما استخراج هندسه زیرمجموعههای شبکه جادهای است که در آن مشکلات شناسایی شده است. با این حال، بازسازی شبکه راه ها تا حدی به کمیت و کیفیت مسیرهای محلی بستگی دارد، همانطور که در ادامه خواهیم دید. استراتژی ما استخراج هندسه زیرمجموعههای شبکه جادهای است که در آن مشکلات شناسایی شده است. با این حال، بازسازی شبکه راه ها تا حدی به کمیت و کیفیت مسیرهای محلی بستگی دارد، همانطور که در ادامه خواهیم دید. استراتژی ما استخراج هندسه زیرمجموعههای شبکه جادهای است که در آن مشکلات شناسایی شده است. با این حال، بازسازی شبکه راه ها تا حدی به کمیت و کیفیت مسیرهای محلی بستگی دارد، همانطور که در ادامه خواهیم دید.بخش 5 ، به ویژه در مکان هایی با جریان ترافیک کمتر یا زمانی که مقدار افست مسیر بیش از حد است.
2.1. بیان مسأله
قبل از معرفی استراتژی، مقدمات را معرفی می کنیم و به طور رسمی مشکل داده های شبکه راه را تعریف می کنیم.
تعریف 1 (شبکه راه).
یک شبکه جادهای یک گراف جهتدار G = (V, E, C) است که در R2 تعبیه شده است ، که در آن V∈ R2 مجموعهای از گرههای نمودار است که با دو مختصات توصیف میشوند: طول و عرض جغرافیایی، E∈ V×V لبههای جهتدار هستند. که مربوط به بخش های جاده (یا به اختصار rs) است که دو گره را به هم متصل می کند و C⊂ E × E محدودیت های اضافی خاصی را مشخص می کند (یا ممکن است خالی باشد)، مانند هزینه های زمان عبور بین بخش های جاده مجاور.
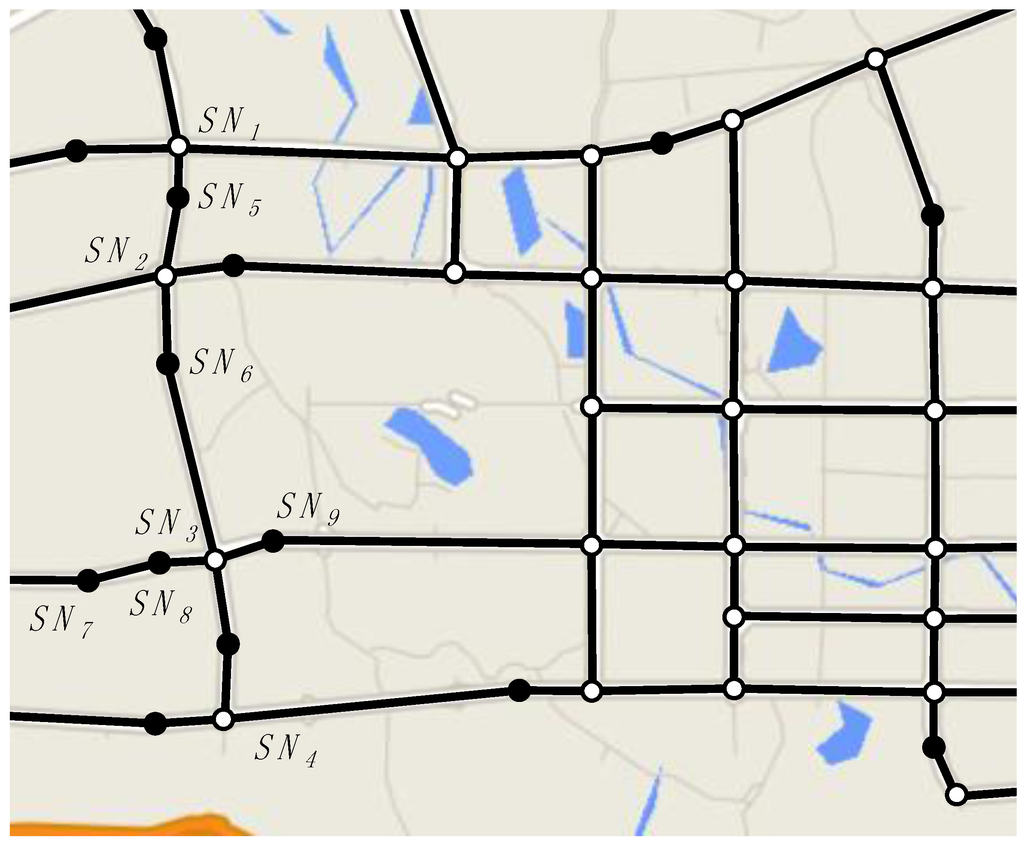
همانطور که در بسیاری از منابع نقشه معمولی، به عنوان مثال، پروژه OSM، هندسه جاده ها در این مقاله با بخش های جاده مستقیم نشان داده می شود، که در آن یک جاده منحنی را می توان به عنوان دنباله ای از بخش های جاده متصل تقریب زد، همانطور که در شکل 1 نشان داده شده است . برای سادگی، همه گره ها را گره های قطعه (SNs) می نامند، اگرچه برخی از آنها تقاطع چندین جاده نیستند. به عنوان مثال، نقاط سفید در شکل 1 (به عنوان مثال، SN 1 – SN 4 ) تقاطعات در اتصالات جاده هستند، در حالی که نقاط ضخیم (یعنی SN 5 – SN 9) در یک جاده قرار دارند. دقت هر عملیات در یک شبکه جاده نیز به دانه بندی بخش های جاده بستگی دارد.
تعریف 2 (مسیر).
یک مسیر مسیر یک جسم متحرک است که به عنوان یک سری نقاط مکان با مهر زمانی با یک بازه زمانی مشخص گرفته شده است، که به صورت T = (P i | i = 1, 2, …, n) نشان داده می شود، جایی که P i = (P) i عرض جغرافیایی، P i طول جغرافیایی، P i مهر زمانی).
تعریف 3 (خطای اتصال توپولوژی قطعات جاده).
خطای اتصال توپولوژی بخشهای جاده در صورتی شناسایی میشود که دنباله مسیر T از دو بخش جاده واقعی که در شبکه جادهای گسسته هستند، به ترتیب G بگذرد. در اینجا، خطای اتصال توپولوژی بخشهای جاده یک خطای توپولوژی معمولی بین بخشهای جاده است. ناشی از کیفیت پایین داده های متریک ابتدایی جاده است.
تعریف 4 (کمبود قطعه جاده).
اگر دنباله یک مسیر T از یک بخش جاده واقعی بدون یک قطعه جاده مربوطه rs در شبکه جاده G عبور کند، یک نقص بخش جاده شناسایی می شود، که اغلب به دلیل کسب اطلاعات جدید جاده ای است که از ساخت و ساز شهری عقب مانده است.
مشکل به روز رسانی شبکه راه در این مقاله به صورت زیر تعریف شده است:
با توجه به مجموعه ای از مسیرهای GPS و یک شبکه جاده G = (V، E، C)، PRS ( به عنوان مثال، خطا و نقص اتصال توپولوژی بخش های جاده) را پیدا کنید و آنها را در محدوده محلی برطرف کنید.
2.2. استراتژی به روز رسانی مارپیچی
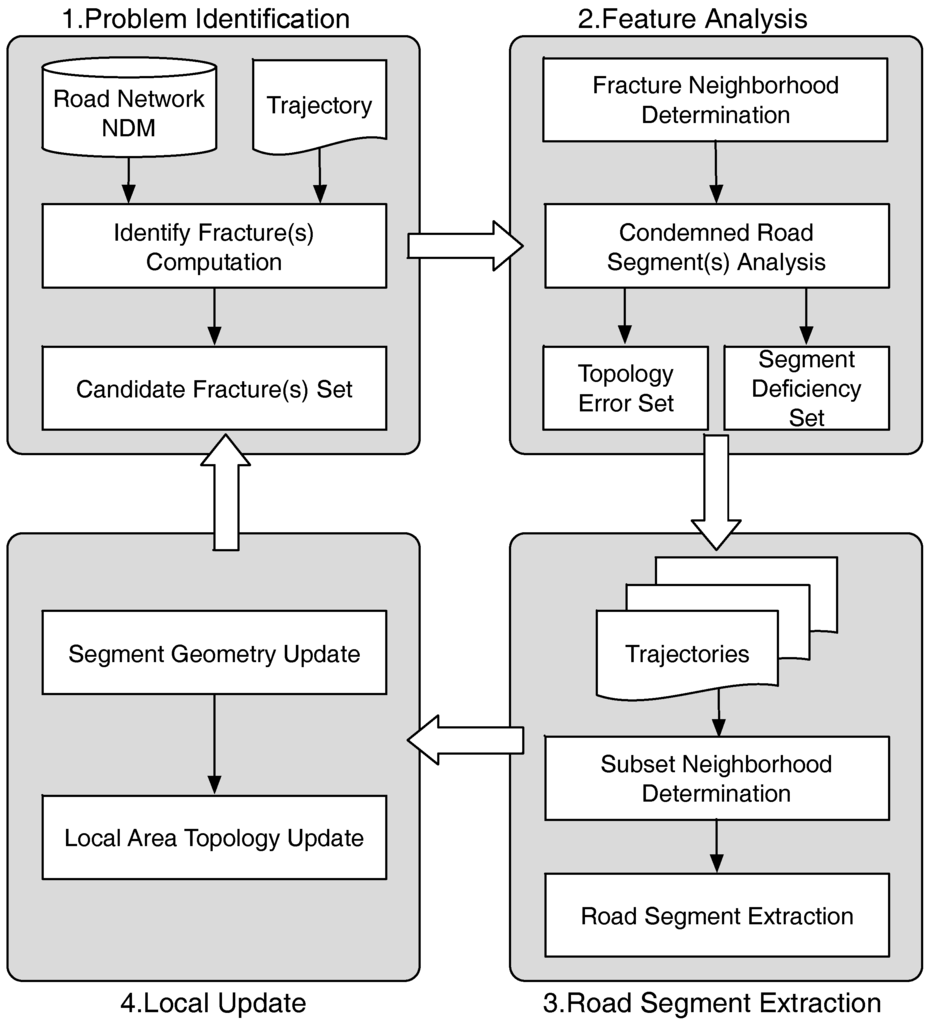
معماری استراتژی بهروزرسانی پیشنهادی ما، همانطور که در شکل 2 نشان داده شده است ، یک فرآیند پیشرونده مارپیچی است که از چهار مرحله اصلی تشکیل شده است: شناسایی مشکل ، تجزیه و تحلیل ویژگی ، استخراج بخش جاده ، و بهروزرسانی محلی . فرآیند مارپیچی به جای شناسایی همه PRS ها در همان ابتدا ، فرآیند به روز رسانی را به مناطق محلی که هر مسیر از آنجا عبور می کند، می شکند . این استراتژی کل شبکه جاده را با چندین دور به روز رسانی پردازش می کند و بخش های خاصی از شبکه جاده را در هر دور بازرسی و به روز می کند. تعداد دورها به مسیرهای ورودی شناسایی مشکل بستگی دارد. این به ما اجازه می دهد تا با محدود کردن حداکثر تعداد مجموعه داده های مسیر ورودی، تعداد دورها را کنترل کنیم یا با تعیین یک مسیر متفاوت، روی یک منطقه خاص تمرکز کنیم.
شناسایی مشکل این مرحله یک مجموعه داده شبکه جاده ای را در قالب یک NDM در نظر می گیرد (مدل داده شبکه، S. Rogers، و همکاران 1999 [ 28 ]). این یک مسیر منفرد از مجموعه داده مسیر داده شده را می پذیرد و تمام موقعیت های PRS های ممکن را در طول مسیر با استفاده از HMM بازیابی می کند. این را می توان با یک HMM مناسب که شبکه جاده و مسیر را ترکیب می کند، به طور موثر انجام داد. خروجی این مرحله دنباله ای از مجموعه نقاط کاندید GPS (به نام شکستگی) است که موقعیت PRS ها را نشان می دهد .
تجزیه و تحلیل ویژگی این مرحله محله (های) PRS (های) بازیابی شده را تعیین می کند و سپس تجزیه و تحلیل مشخصه و نوع مشکلات را انجام می دهد. مشکلات به دو مجموعه از بخش های مشکل به عنوان خروجی مطابق با خطای اتصال توپولوژی بخش های جاده و کمبود بخش جاده تقسیم می شوند. نتایج بعداً برای تعیین اکتساب داده های مسیر جزئی مورد نیاز برای استخراج و به روز رسانی شبکه محلی استفاده می شود.
-
تعیین محله(های) PRS (ها) نه تنها اطلاعات موقعیت نقاط نامزد مربوطه را در نظر می گیرد، بلکه فاصله نقاط کاندید اولین نقطه نمونه گیری تا نقاط کاندید نقطه نمونه گیری نهایی را نیز در نظر می گیرد. یک شکستگی برای جلوگیری از درگیر کردن مقادیر عظیمی از داده های مسیر در محاسبات بعدی، از فاصله اقلیدسی برای تعیین محدوده هر محله استفاده می کنیم.
-
تجزیه و تحلیل مشخصه و نوع، احتمالات انتقال در HMM، فواصل دایره بزرگ و میانگین سرعت واقعی بین نقاط همسایه را که در محله(های) ساخته شده در بالا قرار می گیرند، اندازه گیری می کند. سپس این مقادیر را با محدودیت های منظم در مسیر(های) نسبی مقایسه می کند.
استخراج بخش جاده این مرحله اطلاعات بخش جاده را از زیرمجموعه(های) مسیرهای متعدد در برابر همسایگی(های) PRS (های) بازیابی شده استخراج می کند. مسیرهای مربوط به محله(های) مشکل را وارد می کند و سپس بخش هایی از نقاط مسیر را در داخل این محله(ها) استخراج می کند تا هندسه PRS ( ها) را ایجاد کند. خروجی این مرحله دو مجموعه از بخش های جاده است.
به روز رسانی شبکه محلی این مرحله شبکه جاده را با استفاده از اطلاعات بخش جاده اختصاص داده شده در طول تجزیه و تحلیل ویژگی و استخراج بخش جاده به روز می کند. این معماری شبکه جاده های فعلی را در زمینه محلی هر PRS تطبیق می دهد . سپس نتایج در تکرار بعدی استفاده می شود یا در یک پایگاه داده برای مطالعات و برنامه های کاربردی خارجی ذخیره می شود.
3. الگوریتم تشخیص PRS مبتنی بر HMM
در این بخش، الگوریتم تشخیص PRS مبتنی بر HMM خود را به تفصیل شرح می دهیم. این الگوریتم شامل سه عملیات اساسی است که در یک مارپیچ رو به بالا سازماندهی شده اند ( شکل 2 را ببینید ). در ابتدا، مجموعه ای از موقعیت های نامزد با شعاع r ، همراه با پیش بینی های هر نقطه P i در امتداد یک مسیر از پیش پردازش شده T بازیابی می شود . سپس، مسیر T به گونهای تفسیر میشود که طبق یک فرآیند مارکوف پنهان در مجموعه موقعیتهای نامزد حرکت کند. در نهایت، فرآیند HMM توسط الگوریتم تشخیص، IdentifyFracture ، برای مشکلات احتمالی در ناحیه محلی که توسط T. در مرحله پردازش بعدی، PRSs به عنوان یک سری موقعیت های ناقص در شبکه جاده ها برای پیگیری کار مشخص شده اند. اگر هیچ مشکلی شناسایی نشد، مسیر بعدی برای شناسایی وارد می شود.
3.1. آماده سازی موقعیت کاندیدا
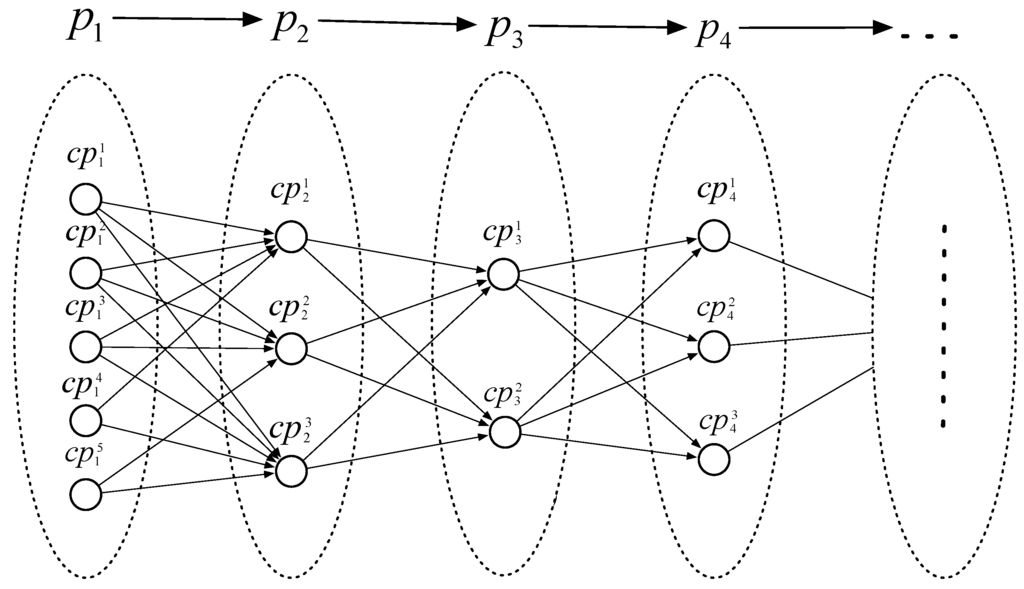
با توجه به مسیر T = p 1 → p 2 → … → p n ، ابتدا تمام موقعیت های نامزد در شبکه مربوط به هر نقطه p i , 1 ≤ i ≤ n را محاسبه می کنیم که نشان دهنده حداقل فاصله از نقطه p i تا یک همسایه است. قطعه جاده rs j . موقعیت نامزد ( cp ، به اختصار) نقطه p i در یک بخش جاده rs j ، پروژه طرح ریزی است ( p i ، rs j) از نقطه cp روی rs j :
جایی که gc ( p i , cp ) فاصله دایره بزرگ بین p i (نقطه مشاهده شده) و نقاط روی rs j است . طرح ریزی یک نقطه نمونه برداری می تواند یک گره قطعه یا یک نقطه طرح عمودی در داخل یک قطعه جاده باشد.
محاسبه موقعیت های نامزد از تمام بخش های جاده در یک شبکه واقع بینانه نیست. درعوض، آستانههایی مانند فاصله r و عدد k برای محدود کردن محاسبه موقعیتهای کاندید p i در بخشهای جاده نزدیک، که با CPs ( pi ، G ، r ، k ) مشخص میشوند، استفاده میشوند. همانطور که در شکل 3 نشان داده شده است ، پنج نزدیکترین موقعیت کاندید p i از cp 1 تا cp 5 ، شامل هر دو گره قطعه ( cp 1 و cp 2) است.، مربوط به rs 1 ، rs 5 و rs 6 ) و نقاط برآمدگی عمودی ( cp 3 ، cp 4 و cp 5 ، مربوط به rs 2 ، rs 3 و rs 4 ، به ترتیب).
3.2. HMM برای تشخیص مشکل
هنگامی که تمام موقعیت های نامزد در امتداد یک مسیر T بازیابی شدند، HMM مربوطه را برای شناسایی مشکلات اساسی در شبکه جاده می سازیم. در HMM مرتبه اول ایده آل برای تشخیص مشکل، مسیر حرکت یک جسم متحرک به گونه ای مدل سازی می شود که طبق یک فرآیند مارکوف بین موقعیت های نامزد گسسته از بخش های جاده مربوطه حرکت کند، که تا حدی شبیه به رویکردهای تطبیق نقشه است. پل نیوزون و همکاران [ 16 ]. علاوه بر متحمل شدن توالی مشاهدات (مسیر T، انتقال حالت های پنهان (موقعیت های نامزد) می تواند از دیدگاه HMM، ساختار شبکه راه محلی را که از کنار آن عبور می کند منعکس کند. به این معنا که مشکلات در دادههای شبکه جادهای زمانی مشخص میشوند که روی شکستگیهای احتمالی در طول فرآیند مارکوف حالت پنهان تمرکز کنیم. با این حال، احتمالات انتشار و احتمالات انتقال حالت قبل از معرفی الگوریتم تشخیص داده شده است زیرا آنها اجزای اصلی HMM هستند.
احتمالات انتشار این احتمالات احتمال به دست آوردن یک نقطه نمونه گیری p را با توجه به موقعیت نامزد cp در یک بخش جاده rs ، که به عنوان pr ( p | cp ) نشان داده می شود، می دهد. از آنجایی که می توان نویز GPS را بر اساس کار قبلی فرض کرد که از توزیع گاوسی تبعیت می کند (Paul Newson و همکاران، 2009 [ 16 ])، ما به طور رسمی احتمال انتشار pr ( p | cp ) را به صورت زیر تعریف می کنیم:
که در آن ‖ p − cp ‖ gc فاصله دایره بزرگ بین نقطه نمونه p و موقعیت نامزد cp است . پارامتر σ انحراف استاندارد اندازه گیری GPS است.
احتمالات انتقال حالت این احتمالات احتمال مسیر واقعی مسیر T را از یک موقعیت نامزد cp i به موقعیت نامزد دیگر cp j می دهد ، که مربوط به دو نقطه نمونه برداری متوالی در T است . با استفاده از فرمول زیر، احتمالات به گونه ای نرمال می شوند که متناسب با زمان عبور بین موقعیت های نامزد در شبکه جاده ای باشد:
که در آن t ∆ نشاندهنده هزینه واقعی زمان عبور از نقطه مشاهدهشده قبلی pk به نقطه بعدی pk +1 است ، و t arg نشاندهنده میانگین هزینه زمان گذر از cp i به cp j است که از آمار تاریخی استخراج شده است. β پارامتری برای کنترل اثر میانگین زمان عبور است. زمان عبور (یا زمان رانندگی) بین دو موقعیت نامزد به جای فاصله مسیر مورد استفاده در کار قبلی، به محاسبه احتمال انتقال در این مقاله معرفی شده است (Rudy Raymond et al., 2012 [34 ]]) زیرا زمان حمل و نقل واقعی وسایل نقلیه غیر اختصاصی با دقت بیشتری شرایط عادی حرکت را از طریق یک مسیر مشخص که انتقال از یک موقعیت نامزد به موقعیت دیگر در HMM ما است، توصیف می کند.
3.3. تشخیص مشکل
با احتمالات بالا، الگوریتم تشخیص خود را برای شناسایی بخش های مشکل در طول فرآیند مارکوف که توسط موقعیت های نامزد تشکیل شده است، طراحی می کنیم. فرآیند شناسایی با ورودی یک مسیر T آغاز می شود و پس از محاسبه همه موقعیت های نامزد در شبکه جاده G و محاسبه احتمالات، یک نمودار HMM G ‘ تولید می کند (همانطور که در شکل 4 نشان داده شده است). سپس، هنگام بررسی نمودار HMM در امتداد T ، مشکلات مربوط به بخش های جاده در داخل مسیر T مشخص می شود .
نمودار HMM برای T که با G = ( V , E ) نشان داده می شود، مجموعه موقعیت های نامزد همه نقاط نمونه برداری (که با V ‘ مشخص می شود) و مجموعه زیرمسیرهای احتمالی بین دو نقطه نمونه برداری متوالی (که با E نشان داده می شود ) را نشان می دهد. ). به این ترتیب، میتوانیم T را در G به عنوان مسیری در نظر بگیریم که به بهترین وجه با توالی نقاط نمونه آن مطابقت دارد، اگرچه مسیر بهینه برای ما در این مقاله نگران کننده نیست. PRS در داخل مسیر Tبنابراین به عنوان شکستگی در مسیرهای فرعی مرتبط که در آن احتمالات (اعم از احتمال انتشار یا احتمالات انتقال حالت) از نقاط کاندید یک نقطه نمونهبرداری به نقطه نمونهبرداری بعدی در G ‘ بی نهایت کوچک (تقریباً صفر) گرفته میشوند. به عنوان مثال، cp i و cp j معجون های کاندید دو نقطه نمونه برداری ( p i و p j ) در دو بخش جاده جدا شده در G هستند که در دنیای واقعی به هم متصل هستند. سپس، یک شکستگی را می توان با یک احتمال انتقال حالت بی نهایت کوچک در G ‘ شناسایی کرد، اگر p i و pjبا توجه به زمان نمونه برداری متوالی هستند.
| الگوریتم IdentifyFracture |
| ورودی: دنباله موقعیت نامزد CPs , Road network G . |
| خروجی: دنباله شکست F در G |
| 1: G ′ = GenerateHMMG( G , CPs ); // نمودار HMM G را تولید می کند |
| 2: F را به عنوان یک لیست خالی مقداردهی کنید . // دنباله ای از شکستگی ها |
| 3: f را به عنوان یک شکستگی خالی اولیه کنید . // ظرف شکستگی |
| 4: برای هر نقطه نمونه گیری p انجام می دهم |
| 5: اگر مجموعه cp از p i خالی است ، p i را به f اضافه کنید . |
| 6: ادامه ;// به نقطه نمونه برداری بعدی می رود |
| 7: اگر هیچ مسیر فرعی از مجموعه cp از p i به بعدی موجود نیست ، p i را به f اضافه کنید . |
| 8: ادامه ;// به نقطه نمونه برداری بعدی می رود |
| 9: اگر هیچ cp از p i وجود نداشته باشد ، هر دو مسیرهای فرعی را از دو طرف به هم وصل می کند |
| 10: اگر p i نقطه پایانی مسیر نیست ، p i را به f اضافه کنید . |
| 11: اگر شکستگی خالی نیست ، f را به F فشار دهید و f را پاک کنید . |
| 12: بازگشت F ; |
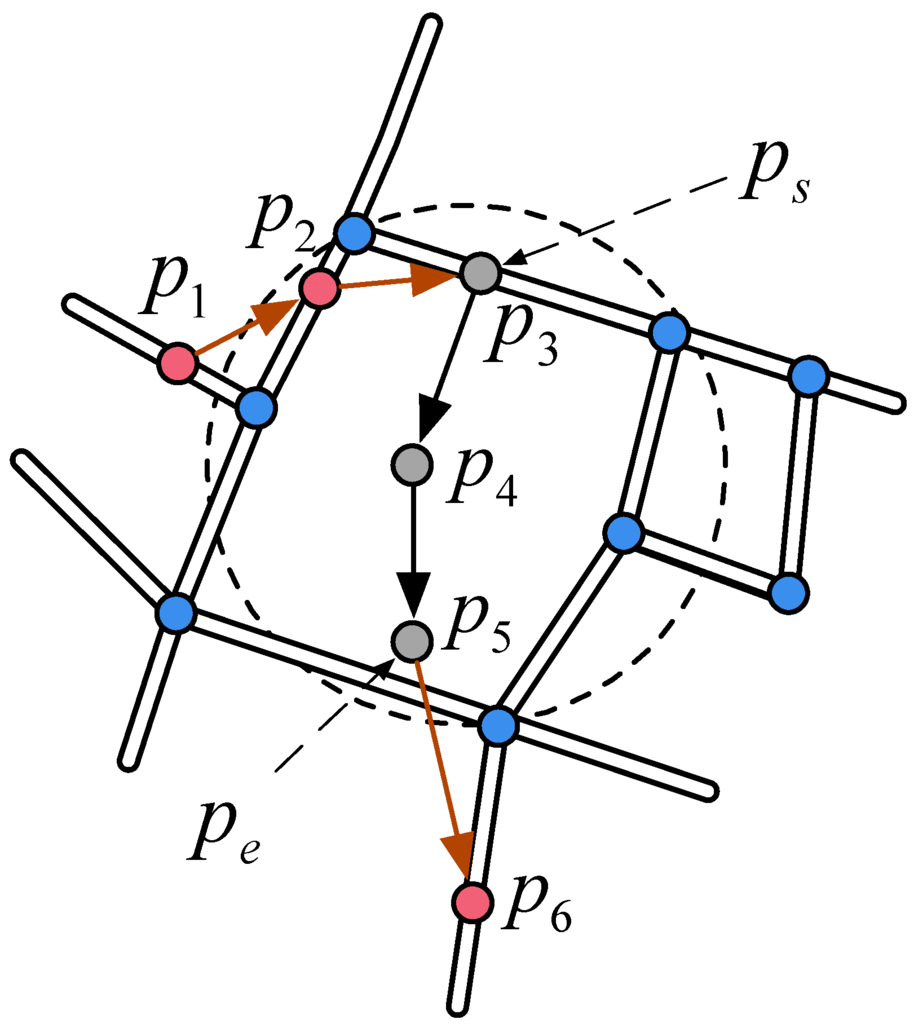
الگوریتم IdentifyFracture برای تشخیص تمام شکستگی ها در طول سفر T معرفی شده است . ابتدا با ساختن HMM بر روی توالی موقعیت نامزد CP s ، نمودار G ′ = ( V ′, E ′) را می سازیم . سپس، با جستجوی شکستگی بین موقعیتهای نامزد و مسیرهای فرعی در امتداد ترتیب توپولوژیکی نمودار، اتصال G را بررسی میکنیم. در نهایت، دنباله شکست F، متشکل از نقاط نمونهبرداری به شکل تاپل ( p s , p e ) که عناصر آن به ترتیب نقطه شروع و پایان شکستگی هستند، گزارش میشود.
الگوریتم ابتدا بررسی می کند که آیا مجموعه موقعیت نامزد نقطه نمونه p i خالی است یا خیر و سپس مسیرهای فرعی را از موقعیت های کاندید p i تا موقعیت های نامزد نقطه نمونه برداری بعدی p i+ 1 تعیین می کند . اگر نقطه نمونهبرداری p i نتواند چک را پاس کند، اگر ps خالی باشد به ps اختصاص داده میشود ، در غیر این صورت نقطه نمونهگیری بعدی p i +1 به p e اختصاص داده میشود (همانطور که در شکل 5 نشان داده شده است.آ). یک استثنا مهم وجود دارد: زمانی که هم موقعیتهای کاندید و هم زیرمسیرهای p i (که اولین یا آخرین نقطه یک مسیر نیست) در دسترس هستند، اما هیچ یک از موقعیتهای نامزد، مسیرهای فرعی را در دو طرف به هم متصل نمیکنند. در این حالت، نقطه به هر دو p s و p e اختصاص داده می شود (همانطور که در شکل 5 ب نشان داده شده است). هنگامی که یک نقطه نمونه برداری p i از چک عبور کرد و p s و p e خالی نشدند، شکستگی به شکل ( p s , p e ) به F اضافه می شود و p s و p eپاک می شوند. مقدار p s را نمی توان بعد از تخصیص تغییر داد تا زمانی که پاک شود، در حالی که مقدار p e ممکن است قبل از پاک شدن جایگزین شود. به عنوان مثال، شکل 5 چهار نوع شکستگی را نشان می دهد که توسط الگوریتم IdentifyFracture شناسایی شده اند . p e در شکل 5 c,d به p i اختصاص داده شد و سپس با p i+ 1 جایگزین شد .
4. استخراج و به روز رسانی بخش های جاده های محلی
با توجه به شکستگیهای بخش قبل، میتوانیم نقاط نمونهبرداری را برای تعیین محل مشکلات پیدا کنیم و روشی را برای بازسازی بخشهای جاده با استفاده از مسیرهای متعدد جمعآوریشده توسط وسایل نقلیه یا افراد غیرمتخصص بررسی کنیم. ما می توانیم PRS و اتصالات را در مقیاس محلی تعمیر کنیم. اولین گام، ساختن همسایگی هر مشکل است، که منطقه محلی را که درگیر است تعریف می کند و به تحلیل ویژگی های مشکل کمک می کند. گام بعدی مربوط به مسیرهای جدید مربوط به محله است و شامل دو وظیفه است: (1) ایجاد هندسه بخش های جاده جدید. و (2) به روز رسانی هندسه بخش های جاده. جزئیات این مراحل در ادامه توضیح داده شده است.
4.1. محله مشکل
همسایگی یک مشکل با شروع و پایان شکستگی ( ps و p e ) و همچنین موقعیتهای کاندید تعیین میشود که یک ناحیه دایرهای با بیشترین فاصله بین موقعیتهای کاندید ps و p e به عنوان قطر ایجاد میکند. به عنوان مثال، در شکل 6 ، مسیر T = p 1 → p 2 → … → p 6 با شکستگی مواجه می شود که نشان دهنده مشکل در G است.. نقاط قرمز نشان دهنده تشخیص عبور از نقطه نمونه برداری هستند و نقاط خاکستری نقاط نمونه گیری شکستگی را نشان می دهند (یعنی p 3 ، p 4 و p 5 ). همسایگی توسط نقاط کاندید شروع شکستگی ( p s = p 3 ) و پایان ( p e = p 5 ) تعیین می شود.
بعد از اینکه محله مشکل ساخته شد، میتوانیم به PRS های مرتبط بپردازیم. ابتدا اتصالات بین بخش های اصلی جاده در داخل محله بررسی می شود. قطر محله با آستانه فاصله مقایسه می شود تا مشخص شود که آیا خطای توپولوژی است یا نقص قطعه. خطاهای توپولوژی را می توان با عملیاتی مانند “کشش” و “ادغام” تصحیح کرد، در حالی که بخش های از دست رفته بعداً توسط هندسه های استخراج شده از مسیرهای متعدد بازیابی می شوند.
4.2. استخراج قطعه جاده
هدف از این مرحله تولید هندسه بخش های جاده از دست رفته برای بازسازی شبکه راه محلی است. برای اهداف عملی، بخش فرعی یک مسیر منفرد در منطقه محلی اغلب نسبتاً پراکنده است و اطلاعات مکانی کافی را ارائه نمی دهد. بنابراین ما تمایل داریم که هندسه را از چندین مسیر مرتبط در محله مشکل استخراج کنیم.
یک روش خوشهبندی برای گروهبندی تمام نقاط نمونهبرداری و یافتن نقاط اسکلتی که بخشهای جاده زیربنایی را با توجه به پیچیدگی کم بخشهای جاده در داخل یک محله مشکل نشان میدهند، معرفی میشود. مفروضات ما این است که تمام دنبالههای نقاط نمونهگیری ورودی، مسیر مشابهی را در داخل محله مشکل به عنوان مسیر برای تشخیص مشکل دنبال میکنند. این نیاز به یک پیش پردازش برای فیلتر کردن چندین مسیر در یک محله بر اساس سرعت و زاویه جهت به خاطر یک مسیر منحصر به فرد دارد. با این حال، به دلیل ظرفیت محدود، تمرکز ما بر شرح روش های استخراج قطعه جاده در این بخش است.
ما PAM (پارتیشن بندی حول medoids [ 33 ]) را از میان طیف گسترده ای از روش های خوشه بندی به دلیل استحکام آن در برابر نویز و نقاط پرت و اثربخشی و کارایی آن در یک مجموعه داده کوچک انتخاب کردیم. نقطه نمونهبرداری از مسیرها به خوشههایی به دنبال اسکلتهای بخش جاده با استفاده از روش PAM گروهبندی شدند که با به حداقل رساندن فاصله هندسی بین نقاط نمونهبرداری، ساختار خوشهبندی نسبتاً خوبی ایجاد کرد. هدف PAM تقسیم تمام نقاط نمونهبرداری به خوشهها با تعویض مکرر تفاوتها از همه نقاط به نزدیکترین مدوید است. PAM استخراج اسکلت برای بخش ها دارای سه مرحله است:
- (1)
-
تعیین تعداد مناسب خوشه ها (k) با استفاده از “Silhouettes” [ 32 ] پس از به دست آوردن زیربخش های داده های مسیر چندگانه در داخل محله مشکل.
- (2)
-
انتخاب تصادفی k نقطه نمونهبرداری بهعنوان مدویدهای اولیه و بررسی مکرر اینکه آیا هر یک از مدویدها نیاز به جایگزینی دارد یا خیر، با محاسبه تفاوتهای بین نقاط انتخاب نشده و مدویدها.
- (3)
-
کاهش تمام مدویدها با آستانه هایی مانند زاویه فرمان و فاصله، و اتصال مدویدهای باقی مانده به ترتیب.
4.3. به روز رسانی بخش های جاده های محلی
آخرین مرحله، به روز رسانی اطلاعات هندسه و توپولوژی در یک منطقه جزئی از شبکه اصلی جاده است. ابتدا بخشهای تولید شده را به قسمت اصلی اضافه میکنیم و سپس توپولوژی را با استفاده از دو عملیات بهروزرسانی میکنیم: (1) تجدید تقاطعها و (2) اتصال بخشهای جاده.
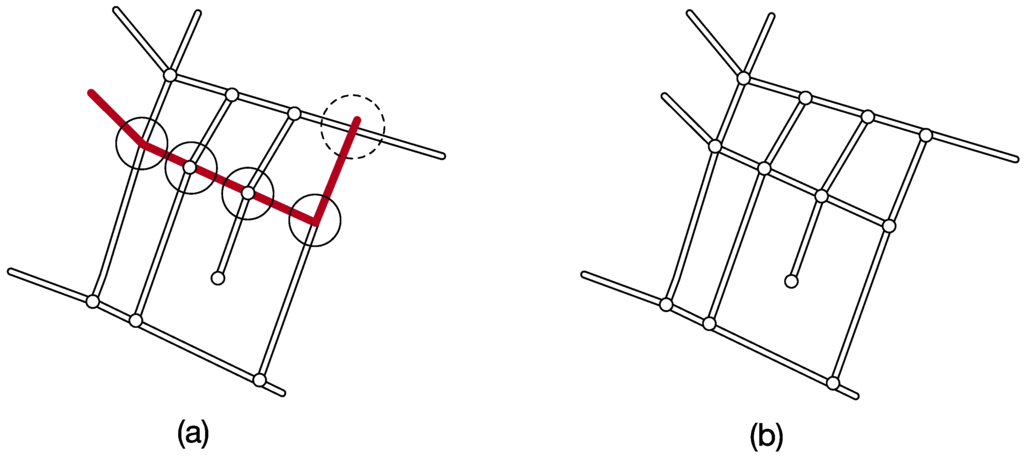
تجدید تقاطع ها این عملیات روابط تقاطع بین بخش های تولید شده و بخش های اصلی نزدیک را شناسایی می کند. اگر روابط تقاطع وجود داشته باشد، تقاطع های جدیدی برای تقسیم بیشتر بخش ها ایجاد می شود. اگر زاویه بین دو بخش بزرگتر از 30 درجه باشد و یکی از آنها از دیگری عبور کند (با دایره های جامد در شکل 7 الف مشخص شده است) یک رابطه تقاطع مشخص می شود.
اتصال بخش های جاده ای برای اطمینان از اتصال بین بخش های تولید شده و بخش های اصلی وارداتی است. اگر شکافی وجود داشته باشد (که در شکل 7 الف با دایره های نقطه چین مشخص شده است، بخش ها در کوتاه ترین فاصله به بخش های اصلی مجاور کشیده می شوند.
5. آزمایشات
برای اعتبارسنجی روش پیشنهادی، مجموعهای از آزمایشها را با استفاده از دادههای واقعی در این بخش انجام میدهیم. ما ابتدا تنظیمات آزمایشی، از جمله مجموعه داده مورد استفاده و پارامترهای خاص را ارائه میکنیم. سپس، نتایج آزمایشات اصلی را گزارش میکنیم و پس از آن بحثهایی انجام میشود. همه آزمایشها در ویژوال استودیو مبتنی بر ArcGIS 10.3 با یک دستگاه Intel Core Quad CPU i7 2.30GHz با 8 گیگابایت حافظه با مایکروسافت ویندوز 8.1 پیادهسازی شدهاند.
5.1. تنظیمات آزمایشی
توضیحات مجموعه دادهدادههای شبکه جادهای ووهان، که جادههای بین ۱۱۳ درجه و ۴۱ دقیقه و ۱۱۵ درجه و ۰۵ دقیقه طول جغرافیایی و ۲۹ درجه و ۵۸ دقیقه و ۳۱ درجه ۲۲ دقیقه را پوشش میدهد، مستقیماً از وبسایت OSM گرفته شده است. از مجموعه دادههای مسیر موجود جمعآوریشده از طریق دستگاههای GPS تاکسیها، در مجموع 36 مسیر فیلتر شده پیوسته از مجموعه داده اصلی در ووهان در 29 مه 2014 بهدست آمد و تأیید شد که در مجاورت فضا قرار دارند. ما مسیرهای GPS خام (در قالب GPX) را بر اساس شرایط زیر فیلتر کردیم: (1) تعداد ماهواره های موجود در طول جمع آوری داده ها بیش از 4 بود. (2) دوره نمونه برداری از 30 تا 60 ثانیه متغیر بود. (3) میانگین رقت افقی دقت (HDOP) کمتر از 1.25 بود. انگیزه پشت فیلتر حذف موارد پرت و افزونگی در مجموعه داده مسیر است.
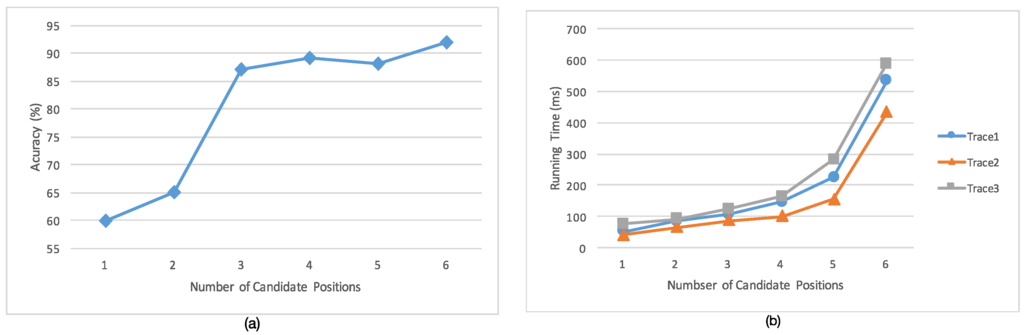
پارامترهای تشخیص مشکل پنج پارامتر در الگوریتم تشخیص ما مورد نیاز است، از جمله شعاع بازیابی کاندید r و حداکثر تعداد موقعیت های کاندید k . شعاع بازیابی کاندید r روی 200 متر تنظیم شده است، مانند بسیاری از رویکردهای تطبیق نقشه (به عنوان مثال، [ 33 ، 34 ، 35 ])، که به این معنی است که احتمال انتشار از یک نقطه GPS به هر بخش جاده، اگر 200 متر باشد، صفر است. (یا بیشتر) جدا. سپس، تأثیر حداکثر تعداد موقعیتهای کاندید را k برآورد کردیمبر روی میانگین دقت تشخیص و میانگین زمان اجرای الگوریتم تشخیص برای حداکثر تعداد موقعیتهای نامزد. دقت تشخیص به طور مداوم با در نظر گرفتن موقعیت های نامزد بیشتری افزایش می یابد (همانطور که در شکل 8 الف نشان داده شده است). با این حال، استفاده بیشتر از موقعیتهای نامزد برای هر نقطه نمونهبرداری GPS منجر به افزایش محاسبات در بخشهای جادهای بیشتر میشود که زمان اجرا را افزایش میدهد. همانطور که در شکل 8 ب نشان داده شده است، زمان اجرای نسبتا قابل قبول است که k = 4 باشد. بنابراین، ما از k = 4 برای نقاط نمونه استفاده می کنیم. برای تخمین احتمالات HMM، از توزیع نرمال با δ = 20.0 متر برای احتمال انتشار و β استفاده می کنیم.= 100.0 برای احتمال انتقال حالت.
خط پایه و رویکرد ارزیابی خط پایه شبکه جاده به صورت دستی با استفاده از داده های شبکه جاده ای با وضوح بالا و اصلی OSM و همچنین ابزارهای ویرایش در ArcGIS 10.3 ایجاد شد. تصاویر ماهواره ای با وضوح 0.6 متر پیکسل برای شهر ووهان که از Tianditu (یک سرویس نقشه عمومی منتشر شده در سال 2013 توسط مرکز ملی ژئوماتیک چین) به دست آمد، به عنوان پس زمینه استفاده شد. برای اندازه گیری دقت خط مبنا، نمونه موقعیت های حقیقت زمین (به عنوان مثال، اتصالات) در منطقه شهری اصلی ووهان با استفاده از نقشه برداری ووهان، 2013، از NGCC (مرکز ملی ژئوماتیک چین) جمع آوری شد. تفاوت بین نقاط مرجع و نقاط دیجیتالی به طور متوسط 1.76 متر با انحراف استاندارد 0.89 متر است.
ما عملکرد روش خود را از نظر کیفیت بخش جاده ارزیابی می کنیم. اندازه گیری کیفیت بخش جاده شامل تعیین کیفی و معیارهای کمی است که توسط Wiedemann [ 36 ] پیشنهاد شده است. معیارهای کمی به ترتیب هندسه و توپولوژی را پوشش می دهند که به صورت زیر تعریف می شوند:
یک قطعه جاده تولید شده با خط مبنا مطابقت دارد اگر طولانیترین فاصله پیشبینی از آن تا خط مبنا یک آستانه فاصله (به نام فاصله بافر) را برآورده کند. در این مقاله، آستانه 3.75 متر، حداقل عرض برای یک جاده طبق دفتر مدیریت ترافیک ووهان تعیین شده است.
5.2. نتایج تجربی
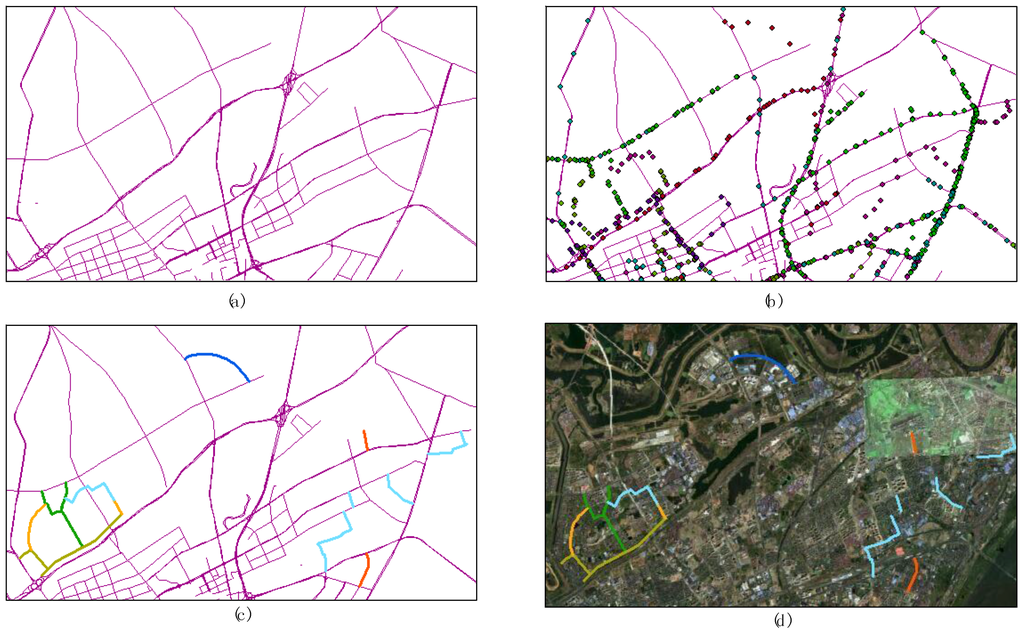
ووهان در سال های اخیر در حال ساخت و بازسازی شبکه جاده های منطقه شهری خود بوده است. چندین جاده جدید تکمیل و به روی ترافیک باز شده است. مناطق جغرافیایی عبور از این مسیرها شامل چندین جاده جدید یا جاده های بازسازی شده است که هدف اصلی ما در به روز رسانی شبکه راه ها بود. شکل 9 a,b بخش های جاده به روز شده را در آزمایش ما نشان می دهد. همانطور که در این شکل ها نشان داده شده است، شش مسیر به عنوان مسیرهای ورودی برای الگوریتم تشخیص انتخاب شدند و شش دور به روز رسانی انجام شد، در حالی که مسیرهای دیگر برای استخراج بخش جاده مورد استفاده قرار گرفتند. این تغییرات به یکباره شناسایی و به روز نشدند. در عوض، شبکه توسط IdentifyFracture بازرسی شدالگوریتم هر بار که یک مسیر وارد می شد، به دنبال استخراج و به روز رسانی با استفاده از کل مجموعه داده مسیر، به عنوان مثال، فرآیند پیشرونده “بازرسی >> تجزیه و تحلیل >> استخراج >> به روز رسانی” در شش دور اجرا شد.
در طول شش دور، در مجموع 12 شکستگی توسط HMM شناسایی شد و در محله های مشکل مربوطه به روز شد. با هر دور فرآیند مارپیچی، هنگامی که شکستگی ها در نمودار HMM پیدا شد، آنها به عنوان ورودی برای ساخت محله های مشکل استفاده شدند. سپس، نقاط نمونهبرداری که در محلههای مشکلدار جدید شکست خوردهاند، برای تولید بخشهای جدید یا تنظیم بخشهای موجود استفاده شد. شکل 9c,d نتایج شش دور به روز رسانی شبکه جاده را در مقایسه با شبکه اصلی و تصاویر RS نشان می دهد. خطوط با شش رنگ مختلف نشان دهنده بخش های تولید شده به دست آمده از مسیرهای مرتبط هستند. به طور شهودی قابل قبول است که ببینیم شبکه جاده ای به روز شده، تا حدی با جاده های موجود در دنیای واقعی در مقایسه با تصویر RS (همانطور که در شکل 9 d نشان داده شده است) مطابقت دارد.
ما هندسه M و توپولوژی M را پس از هر دور از فرآیند بهروزرسانی محاسبه کردیم. همانطور که در جدول 1 نشان داده شده است ، هندسه M شبکه جاده ای به روز شده، همانطور که انتظار می رود، به شدت به کیفیت مسیرهای GPS بستگی دارد، درست مانند تمام رویکردهای ساخت و ساز یا بازسازی شبکه راه. توپولوژی M شبکه به روز شده به شدت تحت تاثیر پیچیدگی ساختار شبکه محلی است. شبکه به روز شده در دور اول (که با خط آبی تیره در شکل 9 ج نشان داده شده است) هندسه M کمتری نسبت به سایر دورها دارد و M بالاتری دارد.توپولوژی نسبت به بقیه این به این دلیل است که جاده جدیدی ساخته شد و کمتر با وسایل نقلیه رفت و آمد می شد. ساختار شبکه محلی در محله مشکل با وجود داده های مسیر پراکنده نسبتا ساده است. با این حال، توپولوژی M دورهای 3 (که با خطوط سبز نشان داده می شوند) و 5 (با خطوط آبی روشن نشان داده می شوند) به دلیل ساختار شبکه محلی پیچیده تر آنها کمتر است.
علاوه بر این، مقادیر توپولوژی M معمولاً کافی نیستند، اگرچه قابل قبول هستند. این به این دلیل است که ما به طور مستقیم بخش ها را در کوتاه ترین فاصله گسترش دادیم تا شکاف بین بخش های جاده را از بین ببریم، که همیشه با واقعیت مطابقت ندارد. کیفیت داده های خط سیر خام نیز با توجه به این موضوع مهم است. برای مثال، دادههای مسیر جمعآوریشده در منطقه کم هستند یا توسط ساختمانهای مجاور قطع میشوند. ما قصد داریم این اثرات منفی را با استفاده از رویکردهای جدید برای بازسازی توپولوژی شبکه جاده در کارهای تحقیقاتی بعدی کم کنیم.
کیفیت نتایج به روز شده نیز با رویکرد [ 16 ] مقایسه شد. میانگین هندسه M رویکرد در [ 16 ] (که با AhmedM مشخص شده است) کمتر از گزارش شده بود زیرا ما مراحل پیش پردازش را اجرا نکردیم. شکل 10 نشان می دهد که میانگین هندسه M در نتایج ما نسبتاً پایدار است. به عبارت دیگر، نتیجه روش ما (که با SpiralM مشخص می شود) به شدت به داده های مسیر عظیم بستگی ندارد. این می تواند به این دلیل باشد که روش در این مقاله فقط PRS ها را روی پایه شبکه جاده های موجود پردازش می کند و فقط نقاط نمونه برداری در داخل همسایگی این PRS را محاسبه می کند.s، در حالی که در روش دیگر، تمام هندسه های جاده دوباره تولید شدند. هر دور از بهروزرسانی مارپیچی ما میتواند از خروجی دور قبلی استفاده کند. با داشتن مسیرهای کمتر برای محاسبات، میتوانیم با اصلاح شبکه جادهای موجود به نتیجه نسبتاً دقیقی دست یابیم. با این حال، شکاف بین دو روش کاهش یافت زیرا ما مسیرهای اضافی را به مجموعه داده مورد استفاده در آزمایش اضافه کردیم.
6. نتیجه گیری
در این مقاله، مشکل بهروزرسانی شبکههای جادهای را در مقیاس محلی با استفاده از دادههای مسیر بررسی کردیم. پیشنهاد ما بر اساس یک الگوریتم تشخیص PRS مبتنی بر HMM است که بر اساس آن یک استراتژی مارپیچی جدید برای بازرسی و بهروزرسانی شبکه جادهای موجود از طریق اطلاعات مسیر بالقوه از ردیابی وسایل نقلیه غیر تخصصی استخراج شده است. استراتژی مارپیچی به دنبال فرآیند پیشرونده “بازرسی >> تجزیه و تحلیل >> استخراج >> به روز رسانی طراحی شد. این از یک الگوریتم مبتنی بر HMM شروع میکند و بهطور خودکار بخشهای جادهای گمشده و خطاهای توپولوژیکی را شناسایی و تجزیه و تحلیل میکند و به استخراج بخشهای جاده از مسیرهای متعدد در بافت محلی مکانهایی که فرآیند شناسایی را شکست دادهاند، ادامه میدهد و در نهایت شبکه اصلی جاده را در منطقه بهروزرسانی میکند.
برای تسهیل چارچوب بهروزرسانی، گراف HMM متشکل از یک توالی نقطه نمونهبرداری و موقعیتهای نامزد مربوطه را به دنبال HMM ایدهآل دوباره طراحی کردیم. علاوه بر این، ما یک الگوریتم برای یافتن شکستگیها در نمودار HMM ایجاد کردیم که به ما کمک کرد تا بخشهای جاده مشکلدار را در شبکه جادهها پیدا کنیم. سپس، برای هر PRS یک همسایگی ساختیم و اطلاعات هندسی را از بخشهای فرعی مسیرهای متعدد استخراج کردیم تا شبکه جادهها را بهروزرسانی کنیم. این فرآیندها با آزمایش هایی با استفاده از داده های واقعی تایید شدند. با بهترین دانش نویسندگان، این مطالعه اولین تلاش برای بررسی ساختارهای شبکه راه های موجود و تجدید آنها از مقیاس محلی به کل با استفاده از تعداد زیادی از مسیرهای وسیله نقلیه GPS است.
در آینده نزدیک، علاوه بر ادامه کاوش الگوریتمهایی برای تشخیص مشکلات و بازسازی شبکههای جادهای محلی، سه موضوع تحقیقاتی مرتبط را که توسط این مدل بیانشده رشتهای مطرح شدهاند، بررسی خواهیم کرد. اولین مورد بهبود استراتژی به روز رسانی مارپیچی به روشی قوی تر است. دوم طراحی رویکردهای جدید برای استخراج اطلاعات بخش جاده از مجموعه کوچکی از داده های مسیر است. این به حفظ و به روز رسانی خودکار داده های شبکه جاده ای موجود با هزینه کمتر کمک می کند و بنابراین می توان از آن برای تولید شبکه های جاده ای جدید راحت تر و کارآمدتر استفاده کرد.







بدون نظر