1. معرفی
سیستم های ماهواره ای ناوبری مدرن می توانند سه سیگنال فرکانس یا بیشتر را ارسال کنند. GPS و QZSS سیگنال L 5 را علاوه بر سیگنال های L 1 و L 2 فعلی معرفی کردند . ماهوارههای چینی Beidou میتوانند سیگنالهای L 2 ، L 7 و L 6 را ارسال کنند و Galileo برای ارائه سیگنالهایی با مرکز L 1 طراحی شده است.، E6، E5B و E5A. فرکانس سوم نزدیک به فرکانس دوم است که شرایط مساعدی را برای رفع مستقیم ابهام خطوط عریض اضافی (EWL) و دستیابی بیشتر به وضوحهای ابهام خطوط عریض (WL) و باریک (NL) ایجاد میکند. بنابراین، استفاده از سیگنالهای فرکانس سهگانه برای بهبود کارایی و قابلیت اطمینان AR در خطوط پایه طولانی، به یک موضوع تحقیقاتی فعال تبدیل شده است.
ترکیب های فرکانس سه گانه را می توان با توجه به طول موج آنها به ترکیبات EWL، WL و NL تقسیم کرد که از طولانی ترین تا کوتاه ترین متغیر است. ترکیب EWL دارای طولانی ترین طول موج است و قدر آن چندین برابر بزرگتر از نویز ترکیبی و باقیمانده یونوسفر است. با استفاده از الگوریتم حداقل مربعات (LS)، ابهام EWL را می توان با استفاده از دوره تک دوره قابل مشاهده [ 1 ] تعیین کرد. با ترکیب ابهام حلشده EWL با مشاهدات فاز اصلی و مشاهدات شبه پرت برای رفع ابهام WL، میزان موفقیت چنین وضوحهای WL میتواند در پردازش دادههای عصرانه به 99 درصد برسد [2، 3 ] .]. در مقایسه با رزولوشن های EWL و WL، IAR با خط باریک به راحتی تحت تأثیر باقیمانده یونوسفر و نویز ترکیبی قرار می گیرد زیرا طول موج آن کوچک است [ 2 ]. به این ترتیب، تحقیقات گسترده ای در این زمینه انجام شده و برخی از روش های اصلاح شده توسعه یافته اند.
یکی از وضوحهای معمولی انتخاب مدلهای بدون هندسه و بدون یونوسفر (GIF) است که با اثرات یونوسفر کوچکتر و عدم جفتشدن هندسی مشخص میشود. یک استراتژی انتخاب ترکیبی جدید بر اساس اصطلاحات یونوسفر با سطوح نویز کل کمتر برای سیستمهای GPS، Galileo و BDS پیشنهاد شد [ 4 ]. به طور مشابه، مجموعههای ترکیبی از سه فرکانس گالیله نیز با نسبتهای کوچکتر بین تاخیر یونوسفر ترکیبی و طول موج، و همچنین نویز ترکیبی متناظر آنها که از سیکلهای 0.1 تا 0.2 متغیر بود، پیشنهاد شدند [5، 6 ] .]. با این حال، برای بسیاری از ترکیبهای پیشنهادی «مجازی» بدون یونوسفر (IF)، بیشتر پیشنهادها اثر یونوسفر را کاهش میدهند اما در واقع آن را حذف نمیکنند. بنابراین، زمانی که یونوسفر فعال است یا زمانی که این الگوریتمها برای خطوط پایه طولانی اعمال میشوند، این وضوحهای ابهام NL هنوز تحت تأثیر اثر یونوسفر هستند. در برخی از روش های ترکیبی خاص، ضرایب تخمینی به طور کامل شرایط GIF را برآورده می کند. با این حال، این ترکیبات منجر به یک مقدار ریشه میانگین مربع (RMS) پایدار ابهام NL تقریباً 3.5 سیکل می شود [ 2 ]. نزدیک به 200 مشاهده از تخمین NL شناور باید برای وضوح NL هموار شود تا به یک خطای تخمین کوچک 0.25 سیکل دست یابد، و اگر سطح نویز کاهش یابد، تعداد تخمین های NL هموارسازی شده لازم کاهش می یابد.
برای غلبه بر کاستیهای ذکر شده در مدلهای GIF، بسیاری از محققان مفاهیم و الگوریتمهای TCAR را گسترش دادهاند تا امکان استفاده از آنها را با مدل مبتنی بر هندسه فراهم کنند [ 4 ، 7 ، 8 ، 9 ، 10 ، 11 ، 12 ]. این مطالعات شامل استفاده از تعداد زیادی از پارامترهای ناشناخته در فرآیند تخمین است و همگرایی این مجهولات زمان بر است. برای پرداختن به موضوع تاخیرهای یونوسفر، برخی از تکنیک های بدون یونوسفر استفاده شده است. با این حال، این رویکردها ماهیت عدد صحیح ابهام را قربانی میکنند و یافتن نامزدهای ابهام عدد صحیح را دشوار میکنند [ 13]]. آزمایشهای اخیر تأیید کردهاند که تأخیرهای یونوسفر DD را میتوان به عنوان پارامترهای ناشناخته همراه با مختصات و ابهامات در نظر گرفت. به نوبه خود، مزیت مهم تر می شود، به ویژه زمانی که این نوع وضوح برای خطوط پایه طولانی اعمال شود [ 14 ]. برای کوتاه کردن بیشتر زمان مورد نیاز برای IAR موفق، برخی از محققان استفاده از محدودیتهای یونوسفر خارجی را برای تقویت تخمینهای یونوسفر پیشنهاد میکنند. یکی از راههای تخمین دقیق تأخیر یونوسفر DD، درونیابی تأخیر یونوسفر از شبکه GNSS دائمی است. بزرگی دقت تخمین یونوسفر را می توان با نزدیکترین سانتی متر تعریف کرد. چنین شبکه گسترده ای GNSS در بیشتر مکان ها، به ویژه در مناطق روستایی و دریایی در دسترس نیست [ 15]. نقشه جهانی TEC یونوسفر (GIM) همچنین میتواند تخمینی از تأخیر یونوسفر ارائه دهد، و دقت آن 2-8 TECu است، که به سختی نیاز به تلقی به عنوان یک محدودیت یونوسفر را برآورده میکند [16 ] . علاوه بر این، تاخیر یونوسفر DD را نیز می توان با ترکیب مشاهده پذیرهای خام و ابهامات حل شده تخمین زد. دقت تخمینهای یونوسفر تنها پس از هموارسازی تخمینهای دهها دوره میتواند به بزرگیهای تعریفشده با نزدیکترین سانتیمتر دست یابد [ 17 ]. در مقایسه با عملیات استخراج تخمین های یونوسفر از اطلاعات خارجی، استفاده از این روش راحت تر است. با این حال، مدت زمان هموارسازی برای برآوردن موقعیت یابی بلادرنگ بسیار طولانی است.
در کاربردهای موقعیت یابی بلادرنگ، تاخیر یونوسفر که به عنوان یک محدودیت یونوسفر در نظر گرفته می شود، باید با فرآیند فیلتر تخمین زده شود. برای TCAR با وزن یونوسفر، یک سوال حیاتی این است که چگونه زمان را برای به دست آوردن تخمین های دقیق تر یونوسفر کوتاه کنیم. با توجه به این نیاز، روش ذکر شده قبلی را اصلاح کردیم. بهبودهای اصلی در الگوریتم ما به شرح زیر است: (1) یک مدل یونوسفر جدید برای تخمین تاخیرهای یونوسفر DD برای به دست آوردن تخمین های یونوسفر دقیق تر در یک دوره زمانی کوتاهتر پیشنهاد شده است. (2) ما با استفاده از الگوریتم هچ، از اطلاعات یونوسفر با دوره متفاوت برای صاف کردن تخمینهای مدل یونوسفر استفاده میکنیم. برای بهینهسازی تخمینهای یونوسفر هموار، طول هموارسازی بهینه تعریف میشود. و راه حلی برای تشخیص ابهامات WL که به اشتباه تعیین شده اند نیز پیشنهاد شده است. (3) اطلاعات یونوسفری حلشده از مرحله دوم بهعنوان یک شبه برای افزایش قدرت مدل مشاهده فعلی در نظر گرفته میشود. بنابراین، مدل مبتنی بر هندسه به یک مدل وزندار یونوسفر گسترش مییابد. برای ارزیابی عملکرد الگوریتم TCAR پیشنهادی جدید، آزمایشهایی انجام میشود و نتیجهگیری ارائه میشود. در مقایسه با سایر سیستمهای ناوبری، سیستم GPS دارای بالاترین کیفیت رصد و دقیقترین تخمین مدار/ساعت است، به علاوه برخی از ماهوارههای Block IIF در مدار که میتوانند سیگنالهای فرکانس سهگانه را ارسال کنند. بر اساس این نتایج، ما از سیستم GPS به عنوان مثال برای نشان دادن روش خود در کنار سایر سیستم ها استفاده می کنیم. (3) اطلاعات یونوسفری حلشده از مرحله دوم بهعنوان یک شبه برای افزایش قدرت مدل مشاهده فعلی در نظر گرفته میشود. بنابراین، مدل مبتنی بر هندسه به یک مدل وزندار یونوسفر گسترش مییابد. برای ارزیابی عملکرد الگوریتم TCAR پیشنهادی جدید، آزمایشهایی انجام میشود و نتیجهگیری ارائه میشود. در مقایسه با سایر سیستمهای ناوبری، سیستم GPS دارای بالاترین کیفیت رصد و دقیقترین تخمین مدار/ساعت است، به علاوه برخی از ماهوارههای Block IIF در مدار که میتوانند سیگنالهای فرکانس سهگانه را ارسال کنند. بر اساس این نتایج، ما از سیستم GPS به عنوان مثال برای نشان دادن روش خود در کنار سایر سیستم ها استفاده می کنیم. (3) اطلاعات یونوسفری حلشده از مرحله دوم بهعنوان یک شبه برای افزایش قدرت مدل مشاهده فعلی در نظر گرفته میشود. بنابراین، مدل مبتنی بر هندسه به یک مدل وزندار یونوسفر گسترش مییابد. برای ارزیابی عملکرد الگوریتم TCAR پیشنهادی جدید، آزمایشهایی انجام میشود و نتیجهگیری ارائه میشود. در مقایسه با سایر سیستمهای ناوبری، سیستم GPS دارای بالاترین کیفیت رصد و دقیقترین تخمین مدار/ساعت است، به علاوه برخی از ماهوارههای Block IIF در مدار که میتوانند سیگنالهای فرکانس سهگانه را ارسال کنند. بر اساس این نتایج، ما از سیستم GPS به عنوان مثال برای نشان دادن روش خود در کنار سایر سیستم ها استفاده می کنیم. مدل مبتنی بر هندسه به یک مدل وزندار یونوسفر گسترش یافته است. برای ارزیابی عملکرد الگوریتم TCAR پیشنهادی جدید، آزمایشهایی انجام میشود و نتیجهگیری ارائه میشود. در مقایسه با سایر سیستمهای ناوبری، سیستم GPS دارای بالاترین کیفیت رصد و دقیقترین تخمین مدار/ساعت است، به علاوه برخی از ماهوارههای Block IIF در مدار که میتوانند سیگنالهای فرکانس سهگانه را ارسال کنند. بر اساس این نتایج، ما از سیستم GPS به عنوان مثال برای نشان دادن روش خود در کنار سایر سیستم ها استفاده می کنیم. مدل مبتنی بر هندسه به یک مدل وزندار یونوسفر گسترش یافته است. برای ارزیابی عملکرد الگوریتم TCAR پیشنهادی جدید، آزمایشهایی انجام میشود و نتیجهگیری ارائه میشود. در مقایسه با سایر سیستمهای ناوبری، سیستم GPS دارای بالاترین کیفیت رصد و دقیقترین تخمین مدار/ساعت است، به علاوه برخی از ماهوارههای Block IIF در مدار که میتوانند سیگنالهای فرکانس سهگانه را ارسال کنند. بر اساس این نتایج، ما از سیستم GPS به عنوان مثال برای نشان دادن روش خود در کنار سایر سیستم ها استفاده می کنیم. علاوه بر برخی از ماهواره های Block IIF در مدار که می توانند سیگنال های فرکانس سه گانه را ارسال کنند. بر اساس این نتایج، ما از سیستم GPS به عنوان مثال برای نشان دادن روش خود در کنار سایر سیستم ها استفاده می کنیم. علاوه بر برخی از ماهواره های Block IIF در مدار که می توانند سیگنال های فرکانس سه گانه را ارسال کنند. بر اساس این نتایج، ما از سیستم GPS به عنوان مثال برای نشان دادن روش خود در کنار سایر سیستم ها استفاده می کنیم.
این مطالعه به شرح زیر سازماندهی شده است: در بخش 2 ، ما به طور خلاصه به مدل ریاضی اساسی و چندین فرض و قرارداد در مورد روش TCAR، به ویژه در مورد ترکیبات، بازنگری می کنیم. در بخش 3 ، روش فعلی TCAR را بررسی و تحلیل میکنیم. در بخش 4 ، ما به صراحت مدل یونوسفر جدید و نحوه گسترش مدل مبتنی بر هندسه را به مدل وزندار یونوسفر با گنجاندن تاخیرهای یونوسفر واقعیتر به عنوان محدودیتها شرح میدهیم. در بخش 5 ، آزمایشهای مربوطه را برای ارزیابی عملکرد روش جدید TCAR انجام میدهیم. در نهایت، در بخش 6 ، نکاتی را در مورد روش ارائه می دهیم.
2. در مورد ترکیبات اساسی در مورد TCAR
در این بخش، به طور خلاصه برخی از اطلاعات اساسی در مورد ترکیب ها را مرور می کنیم. وضوح ابهام جدید بر ترکیبات DD تمرکز دارد. بنابراین برای سادگی، عملگر DD B در بخشهای زیر حذف میشود، مگر اینکه طور دیگری مشخص شده باشد.
بدون از دست دادن کلیت، فرض کنید f 1 , f 2 , f 3 فرکانس های سه حامل هستند و f 1 > f 2 > f 3 را برآورده می کنند . N (1,0,0) , N (0,1,0) و N (0,0,1) ابهامات DD در سه فرکانس هستند. اشتراک نشان دهنده فرکانس های مختلف برای مشاهده پذیرهای فاز DD مربوطه است. تأخیر غیر پراکنده DD عمدتاً از فواصل هندسی و تأخیر تروپوسفر تشکیل شده است. من 1نشان دهنده تاخیر یونوسفر DD نسبت به فرکانس اول است. پارامترهای انتهای معادلات به ترتیب نویز اندازه گیری شبه و فاز را نشان می دهند. در بخشهای بعدی، انحراف معیار مشاهدهپذیرهای شبه و فازی به ترتیب 0.2 متر و 0.003 متر در نظر گرفته شده است [ 2 ]. با فرض اینکه ضرایب ترکیبی i، j و k اعداد صحیح دلخواه هستند، مشاهده شبه DD ترکیبی خطی را می توان به صورت زیر مدل کرد:
که در آن عوامل ترکیبی ابهام، طول موج ترکیبی، یونوسفر و دامنه نویز برای ترکیبات EWL، WL و NL در جدول 1 خلاصه شده است .
3. روش فعلی TCAR
از آنجایی که بسیاری از روشهای TCAR اصلاحشده وجود دارد، برای ارزیابی عملکرد روش پیشنهادی، جدیدترین روش TCAR را با فرآیند محاسباتی مشابه و نرخ موفقیت IAR بالا برای مقایسه انتخاب کردیم. رویه های اصلی آن را می توان به شرح زیر خلاصه کرد.
3.1. قطعنامه های EWL و WL
در مرحله اول، ابهامات شناور EWL به صورت متوالی توسط دو معادله زیر برآورد میشوند:
که در آن نماد ” l ” نشان دهنده بردارهای منهای محاسبه شده (OMC) مشاهده شده مربوطه آنها است. و ماتریس B ماتریس طراحی پارامترهای پایه است. در مرحله دوم، مشتق ابهام شناور را به نزدیکترین عدد صحیح گرد می کنیم. پس از وضوح EWL، از معادله (4) زیر برای رفع ابهام WL عدد صحیح استفاده می کنیم:
3.2. وضوح NL
مرحله دوم تخمین ابهام NL عدد صحیح است و معادله مشاهده مربوطه به صورت زیر بیان می شود:
که در آن V EWL ، VWL و V1 به ترتیب بردار باقیمانده فازهای قابل مشاهده هستند . و I EWL , I WL و I 1 بردارهای OMC متناظر هستند. در فرآیند فیلتر کردن، از الگوریتم LAMBDA برای جستجو و رفع ابهام باریک استفاده می شود [ 18 ، 19 ، 20 ، 21 ]. از رابطه (6) می توان برای تخمین تاخیر یونوسفر استفاده کرد. با این حال، دقت برآورد آن تقریباً 0.3 متر است. بنابراین، تخمینهای یونوسفر فقط به میزان حداقلی به وضوح ابهام کمک میکنند، حتی اگر به عنوان یک محدودیت در نظر گرفته شود (معادله (5)) [ 8 ،17 ]. برای مقایسه با مدل جدید یونوسفر، معادله (6) به عنوان “روش ترکیبی یونوسفر” در بخش های زیر تعریف شده است.
4. مدل جدید وزندار یونوسفر
در مقایسه با روشهای فعلی TCAR، روش جدید TCAR از دو جنبه اصلاح شده است: اول، ابهامهای EWL و WL، و همچنین قابل مشاهدههای شبه و فاز، برای فرمولبندی یک مدل یونوسفر جدید برای تخمین تأخیرهای یونوسفر DD ترکیب شدهاند. به بخش 4.1 مراجعه کنید ). در مقایسه با روش ترکیبی یونوسفر، که تخمین های یونوسفر را در سطح دقت 0.3 متر انجام می دهد [ 22 ]، مدل جدید یونوسفر دارای درجات آزادی بیشتری است. بعلاوه، تخمینهای مدل فوراً توسط اطلاعات یونوسفری با اختلاف عصر با دقت بالا هموار شده است (به بخش 4.2 مراجعه کنید.). بنابراین، انتظار میرود که دقت تخمینهای یونوسفر در زمان واقعی بهتر از 0.1 متر باشد. دوم، تخمینهای یونوسفر با دقت بالا به مدل مبتنی بر هندسه اضافه میشوند و مدل مرتبط با هندسه را به یک مدل وزندار یونوسفر گسترش میدهند (به بخش 4.3 مراجعه کنید ). محدودیتهای یونوسفر میتوانند به افزایش قدرت مدل مشاهده و در نتیجه کاهش زمان همگرایی مجهولات، بهویژه ناشناختههای یونوسفر کمک کنند. این تغییرات به کوتاه کردن زمان TFFS در مقایسه با مدل مشاهده فعلی بدون هیچ محدودیتی کمک می کند.
مشخص است که ابهام EWL را می توان به طور قابل اعتماد در یک دوره مشخص کرد. حتی برای خطوط پایه طولانی با صدها کیلومتر، میزان موفقیت EWL AR فعلی می تواند به 99٪ برسد. وضوح EWL در روش جدید به معادلات (2) و (3) نیز اشاره دارد. سپس از معادله (4) برای رفع ابهامات WL استفاده کردیم.
4.1. مدل جدید برآورد تاخیر یونوسفر DD
قبل از اینکه مدل یونوسفری DD فرموله شود، متغیرهای مستقل زیر وجود دارد: سه مشاهدات شبه پران، مشاهدات سه فاز، دو ابهام EWL و دو ابهام WL. برای افزایش درجات آزادی در مدل و اجتناب از تکینگی ها، تنها هشت متغیر را می توان انتخاب کرد و از مدل کلی مربوطه می توان برای محاسبه تاخیر یونوسفر استفاده کرد که به صورت زیر بیان می شود:
برای بهینه سازی مدل، معادله (7) باید از قیود زیر تبعیت کند:
-
شرایط بدون هندسه:
ایکس1+ایکس2+ایکس3+ایکس4+ایکس5+ایکس6= 0ایکس1+ایکس2+ایکس3+ایکس4+ایکس5+ایکس6=0
-
تأخیر یونوسفر DD باقیمانده را حفظ کنید:
–ایکس1⋅η( 1 , 0 , 0 )–ایکس2⋅η( 0 , 1 , 0 )–ایکس3⋅η( 0 , 0 , 1 )+ایکس4⋅η( 1 , 0 , 0 )+ایکس5⋅η( 0 , 1 , 0 )+ایکس6⋅η( 0 , 0 , 1 )= 1–ایکس1⋅�(1،0،0)–ایکس2⋅�(0،1،0)–ایکس3⋅�(0،0،1)+ایکس4⋅�(1،0،0)+ایکس5⋅�(0،1،0)+ایکس6⋅�(0،0،1)=1
-
حذف N (1,0,0) :
–ایکس1⋅λ( 1 , 0 ,0 )+ایکس7+ایکس8= 0–ایکس1⋅�(1،0،0)+ایکس7+ایکس8=0
-
حذف N (0،1،0) :
–ایکس2⋅λ( 0 , 1 ,0 )–ایکس7= 0–ایکس2⋅�(0،1،0)–ایکس7=0
-
حذف N (0،0،1) :
–ایکس3⋅λ( 0 , 0 ,1 )–ایکس8= 0–ایکس3⋅�(0،0،1)–ایکس8=0
-
شرایط نویز را به حداقل برسانید:
(ایکس21+ایکس22+ایکس23) ⋅σ2پ+ (ایکس24+ایکس25+ایکس26) ⋅σ2ϕ= دقیقه(ایکس12+ایکس22+ایکس32)⋅�پ2+(ایکس42+ایکس52+ایکس62)⋅��2=دقیقه
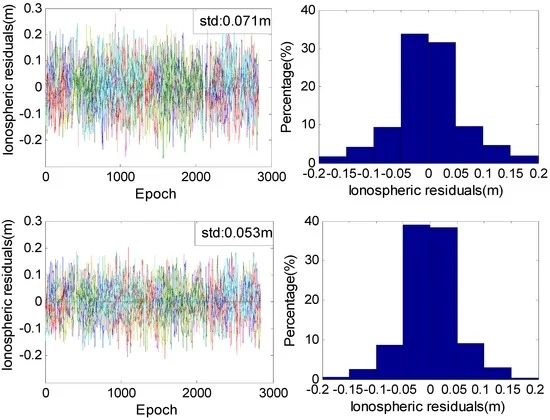
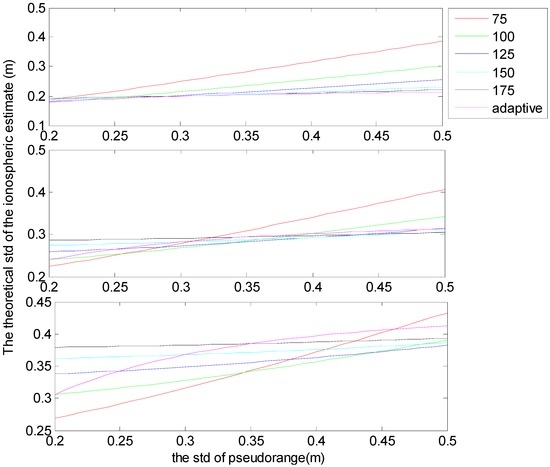
شبه و فاز قابل مشاهده با خطاهای مشترک با یکدیگر در ارتباط هستند. با این حال، همبستگی ها حذف می شوند و به دلیل محدودیت های بدون هندسه به حداقل شرایط نویز کمک نمی کنند. یک فرآیند کسر دقیق توسط ولات و ساور [ 23 ] تشریح شده است. بر این اساس، نسبت نویز کاذب و فاز در به حداقل رساندن وضعیت نویز مهم است و به طور مستقیم بر تخمین مجهولات تأثیر می گذارد. شکل 1همبستگی بین انحرافات استاندارد نظری برآوردهای یونوسفر DD بهینه و نویز فاز، و همچنین همبستگی بین انحراف استاندارد تخمینهای یونوسفر و نویز شبه پرت را نشان میدهد. اگرچه نسبت شبه و نویز فاز ممکن است گاهاً متفاوت باشد، تخمینهایی که از 125 به عنوان نسبت استفاده میکنند، نزدیکترین تخمینها به تخمینهای انطباقی است و انحرافها نسبت به زمانی که نسبت 75، 100، 125 و 150 است، کوچکتر است. بر اساس موارد فوق. کسرها و برای فعال کردن محاسبات ساده، نسبت را 125 تنظیم می کنیم. برآورد مجهولات از معادله (7) در جدول 2 خلاصه شده است .
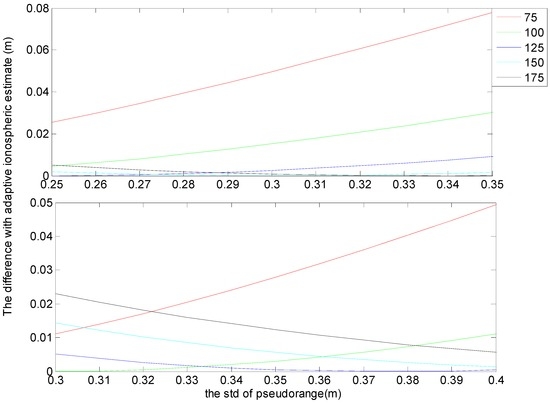
همانطور که همه می دانیم، انحراف استاندارد (std) فازهای قابل مشاهده عمدتاً بین 0.2 میلی متر تا 0.3 میلی متر است. هنگامی که نویز فاز حدود 0.3 میلی متر است، std مربوطه از شبه قابل مشاهده اغلب از 0.3 متر به 0.4 متر محدود می شود. برای شرایط فوق الذکر، شکل 2 تفاوت های متناظر بین تخمین های یونوسفر و تخمین های تطبیقی را نشان می دهد. از شکل 2 قابل مشاهده است، تخمین از نسبت 125 تقریباً نزدیکترین به برآوردهای تطبیقی است. اگرچه دو استثنا وجود دارد: در پانل بالا، زمانی که نویز شبه پرتغالی از 0.3 متر تا 0.35 متر متغیر است، تفاوت بین یونوسفر تخمین زده شده از نسبت 125 بزرگتر از نسبت 150 است. و در پانل پایینی، زمانی که نویز شبه رنگ از 0.3 متر تا 0.35 متر است، تفاوت بین یونوسفر تخمین زده شده از نسبت 125 بزرگتر از نسبت 100 است. با این حال، برای این دو شرایط استثنایی، حداکثر تفاوت فقط 0.7 میلی متر، که در پانل بالایی زمانی اتفاق می افتد که شبه پرتقالی 0.35 متر باشد. بنابراین، انحراف آشکار نیست، و تخمینهای یونوسفر از نسبت 125 هنوز هم میتوان باور داشت که عملکرد بهینه را دارد.
4.2. تخمین های تاخیر یونوسفر هموار
با استفاده از معادلات زیر میتوانیم اطلاعات مربوط به یونوسفر را با دقت بالا بدست آوریم:
که در آن نماد k نشان دهنده دوران فعلی است. پس از تعیین یونوسفر، از معادله (10) برای به دست آوردن تخمین های یونوسفر DD دقیق تر استفاده می کنیم.
در رابطه (10)، ضریب وزنی برابر با وارونگی طول هموارسازی است.
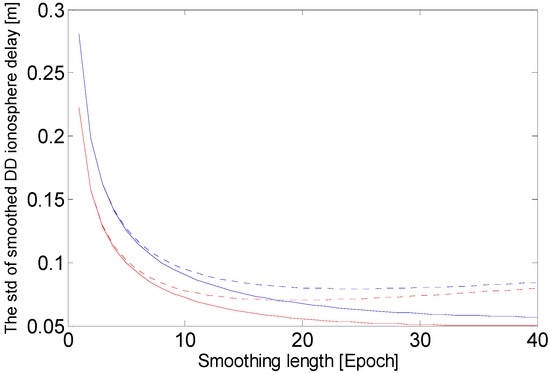
با در نظر گرفتن اثرات مرتبه بالاتر یونوسفر و نویز ترکیبی، انحراف استاندارد یونوسفر به طور کلی از 0.01 تا 0.02 متر متغیر است [ 24 ، 25 ]. در شکل 3با توجه به طول هموارسازی یکسان، دقت تخمین تاخیر یونوسفر از روش جدید همیشه بهتر از روش ترکیبی یونوسفر فعلی است. هنگامی که انحراف استاندارد یونوسفر 0.02 متر است، دقت یونوسفر از روش جدید در ابتدا با افزایش طول هموارسازی بهبود مییابد و به طول هموارسازی بهینه در 16 دوره میرسد و سپس با افزایش طول، انحراف استاندارد افزایش مییابد. اگر یونوسفر دارای انحراف معیار 0.01 متر باشد، روش جدید یونوسفر را با تقریباً همان انحراف استاندارد زمانی که طول هموارسازی برابر یا بیشتر از 16 دوره باشد به دست میآورد. با روش جدید، وقتی از معادله (10) برای تخمین یونوسفر استفاده می شود، پنجره هموارسازی باید فوراً به روز شود و حداکثر طول هموارسازی را می توان روی 16 دوره تنظیم کرد.
در رابطه (10)، اگر دو ابهام WL به درستی تعیین نشوند، تخمین های یونوسفر از رابطه (7) به طور جدی بدتر می شوند، که در نتیجه بر برآورد فعلی و 15 تخمین یونوسفر دوره بعدی از معادله (10) تأثیر می گذارد. اگرچه این پدیده نادر است، اما برای جلوگیری از آن از تست زیر استفاده می کنیم:
که در آن مقدار تطبیقی یک مقدار تجربی است که روی 1.0 تنظیم شده است. جدول 2 نشان می دهد که ابهامات WL به اشتباه تعیین شده باعث یک سوگیری سیستماتیک در یونوسفر حداقل 2 می شود . فقط 0.8 است. بر اساس این دو کسر، تنظیم مقدار تطبیقی بر روی 1.0 می تواند تشخیص دهد که آیا ابهامات WL اشتباه رفع شده اند یا خیر. اگر آزمون ناموفق باشد، می توان از نتایج حاصل از معادله (12) به عنوان تخمین یونوسفر بهینه برای دوره فعلی استفاده کرد.
4.3. وضوح ابهام NL
برای تبدیل تخمینهای یونوسفر DD از مرحله 2 به محدودیتهای یونوسفر، تخمینهای یونوسفر مشتقشده بهعنوان شبهدرنجها به کار گرفته میشوند و در مدل مشاهده فعلی جذب میشوند. پس از این مرحله، معادله (5) را می توان به صورت زیر گسترش داد:
که در آن پارامترهای سمت چپ معادله تفاوت بین تخمین تاخیر یونوسفر و تاخیر واقعی را نشان میدهند. در فرآیند فیلتر کردن، کوواریانس بین تخمین تاخیر یونوسفر و سایر قابل مشاهدهها (یا ترکیبات) را میتوان با قانون انتشار خطا محاسبه کرد. علاوه بر این، واریانس خود به صورت محافظه کارانه به صورت زیر تنظیم می شود:
که در آن سه مقدار تطبیقی به ترتیب بر روی 5، 10 و 16 تنظیم شده است. مقادیر موجود در معادله (14) مطابق شکل 3 تعیین میشوند و در آزمایشهای بعدی برای تأیید تنظیمات ارزش مناسب ارزیابی خواهند شد. ما از الگوریتم LAMBDA برای جستجو و رفع ابهامات استفاده کردیم، و زمانی که نسبت بزرگتر از 3 باشد، دوره ثابت می شود. نسبت با استفاده از رابطه (15) تخمین زده می شود:
که در آن معادله (15) به ترتیب برای هنجار مجذور باقیماندههای ابهام بهترین و بهترین راهحل عدد صحیح دوم استفاده میشود که با هنجار مجذور بردار باقیمانده ابهام اندازهگیری میشود. C مقدار متمایز است، یک مقدار ثابت در بسیاری از بسته های نرم افزاری استفاده می شود، به عنوان مثال، 3، که در آزمایش های ما نیز یکسان است.
این تخمین های یونوسفر ممکن است قدرت مدل فعلی را افزایش داده و در نتیجه زمان همگرایی مجهولات را کوتاه کند. این فرض همچنین در آزمونهای بعدی با استفاده از دادههای رصدی واقعی تأیید میشود.
5. آزمایش ها و تجزیه و تحلیل
برای نشان دادن TCAR جدید و ارزیابی عملکرد آن، ما سه خط پایه بلند مستقل (HOFN-MYVA، OBE4-WTZ3 و LLAG-MASL) را با فواصل بیش از 100 کیلومتر به عنوان شرایط آزمایش انتخاب کردیم. طول خط پایه مربوطه HOFN-MYVA، OBE4-WTZ3 و LLAG-MASL به ترتیب 173 کیلومتر، 166 کیلومتر و 104 کیلومتر است. شش ایستگاه GNSS (HOFN، MYVA، OBE4، WTZ3، LLAG و MASL) متعلق به شبکه MGEX به صورت دلخواه انتخاب شدند. مشاهدات آزمایشی GPS از 21 تا 30 ژانویه 2015 با فاصله نمونه برداری 30 ثانیه جمع آوری شد. هنگامی که تنها دو سیگنال فرکانس در فایل خام ثبت شده بود، از روش نیمه تولید شده برای شبیه سازی سیگنال فرکانس سوم استفاده شد. اینجا برای سادگی، ما فقط نتایج حاصل از خط پایه HOFN-MYVA را در 21 ژانویه 2015 نشان می دهیم تا عملکرد روش جدید خود را با روش فعلی مقایسه کنیم. نتایج در سایر خطوط پایه برای دو روش مشابه است.
5.1. دقت برآوردهای یونوسفر را ارزیابی کنید
شکل 4 تخمین های یونوسفر DD را با استفاده از روش پس پردازش نشان می دهد. می توان مشاهده کرد که یونوسفر تغییرات روزانه زیادی را نشان می دهد و اثر آن را نمی توان با عملیات تفاضل مضاعف از بین برد.
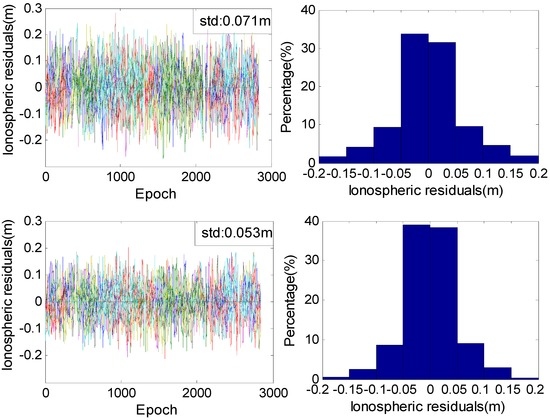
شکل 5 عملکرد دو مدل یونوسفر را نشان می دهد. انحراف استاندارد تأخیرهای یونوسفر برآورد شده از روش جدید 20 درصد کمتر از روش ترکیبی است.
شکل 6 انحراف استاندارد تأخیرهای یونوسفر را نشان می دهد که از طول هموارسازی دوره های 10 و 16 به دست آمده است. انحراف استاندارد تخمین های یونوسفر می تواند کمتر از 0.08 متر باشد که طول هموارسازی 10 دوره باشد. هنگامی که طول صاف کردن به 16 دوره افزایش می یابد، به 0.06 متر کاهش می یابد. این نتایج در مورد دقت در مقابل طول هموارسازی به خوبی با کسرهای نشان داده شده در شکل 3 و مقادیر محاسبه شده با معادله (14) مطابقت دارد. هنگامی که طول هموارسازی 16 دوره است، تخمینهای یونوسفر هموار میتوانند به بزرگیهای تعریفشده با نزدیکترین سانتیمتر دست یابند که شرایط مطلوبی برای کوتاه کردن زمان همگرایی برای پارامترهای ناشناخته ایجاد میکند.
5.2. ارزیابی عملکرد قطعنامه NL
برای تمایز آن از روش جدید، روش فعلی TCAR، که در بخش 2 معرفی شد ، از این پس به عنوان روش قدیمی نامیده می شود. ما دادههای GPS روزانه در روز 21 سال (Doy) را به 12 بخش غیر همپوشانی تقسیم میکنیم. هر بخش شامل دو ساعت داده است و به ترتیب با روش های جدید و قدیمی پردازش شده است. ما از آزمایش های TFFS و موقعیت یابی برای ارزیابی عملکرد AR استفاده می کنیم [ 26 , 27 , 28 , 29 , 30]. در آزمایش های موقعیت یابی، ما ایستگاه HOFN را به عنوان ایستگاه پایه در نظر می گیریم. مختصات دقیق آن از راه حل های هفتگی می آید. ما ایستگاه MYVA را به عنوان ایستگاه مریخ نورد در نظر می گیریم. خطاهای موقعیت یابی را می توان با کم کردن مختصات تخمین زده شده از مختصات زمین دقیقاً مشاهده شده محاسبه کرد.
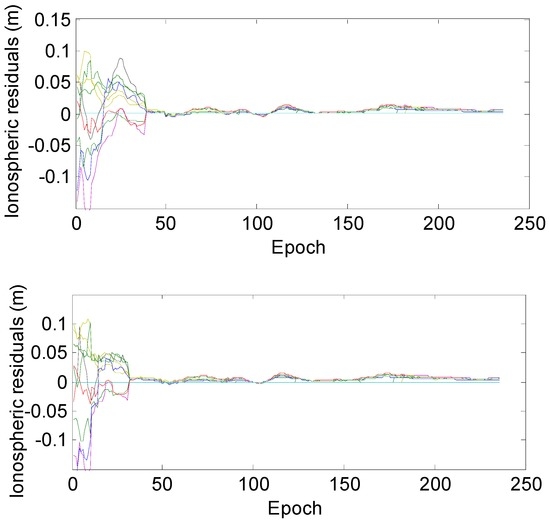
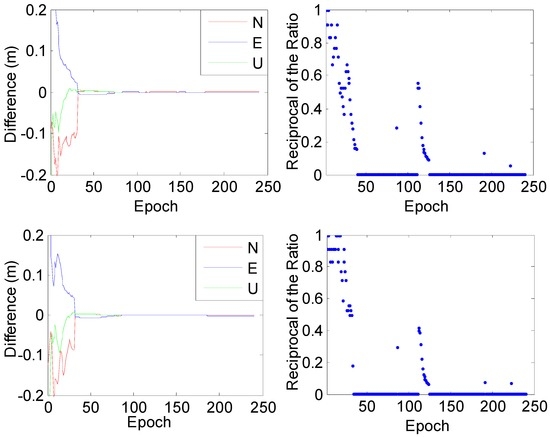
شکل 7 و شکل 8 نتایج بخش اول آزمایش ها را نشان می دهد. با رفع ابهام، باقیمانده های یونوسفر به طور چشمگیری کاهش می یابد. این دو شکل به طور پیوسته نشان می دهد که TFFS با روش قدیمی 39 دوره است و با روش جدید به 32 دوره کاهش می یابد. برای تخمینهای یونوسفر حاصل از روش جدید (پانل پایین)، تفاوتهای بین تخمینهای تأخیر یونوسفر DD و مقادیر واقعی معمولاً کمتر از ۰.۰۵ متر پس از دوره ۱۶ است و بزرگیهای آنها از روش قدیمی (پانل بالا) کوچکتر است. ).
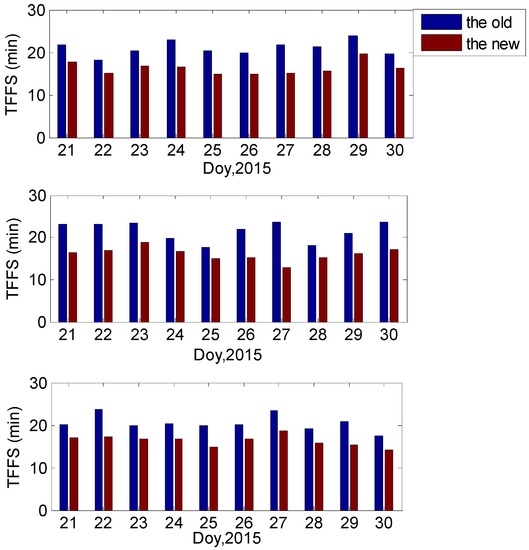
جدول 3 TFFS را برای هر 12 قسمت خلاصه می کند. با استفاده از روش قدیمی، محدوده TFFS بین 20 تا 25 دقیقه است. با روش جدید، TFFS به 15 تا 20 دقیقه کاهش می یابد. میانگین TFFS برای روش جدید 20 درصد کمتر از روش قدیمی است. TFFS سه خط مبنا در شکل 9 نشان داده شده است .
T 1 و T 2 به ترتیب نشان دهنده TFFS برای روش قدیمی و جدید هستند، I نشان دهنده بهبود است و فرآیند محاسبه به شرح زیر است:
همانطور که در جدول 3 نشان داده شده است ، با استفاده از روش جدید، IAR با موفقیت در 30 دقیقه برای تمام 12 مورد آزمایشی به پایان رسید. بنابراین، شکل 10به صراحت تخمین های یونوسفر را تنها در 60 دوره اول برای هر مورد توصیف می کند. می توان مشاهده کرد که باقیمانده های یونوسفر از دوره شانزدهم برای روش جدید تقریباً بین 0 تا 5 سانتی متر است و اندازه آن به وضوح کمتر از روش قدیمی است. همچنین لازم به ذکر است که پس از مشخص شدن موفقیت آمیز ابهامات، تغییرات یونوسفر برآورد شده از دو روش مشابه هستند. یک دلیل احتمالی برای این یافته میتواند این باشد که دقت تخمینهای تاخیر یونوسفر بهدستآمده از فیلتر کردن بسیار بهتر از تخمینهای مربوط به مدل یونوسفر است. بنابراین، محدودیت های یونوسفر کمک کمی می کند. علاوه بر این، تغییرات تخمینهای یونوسفر از هر دو روش الگوی خطای یکسانی را پس از IAR موفق نشان میدهد. شکل 7این نتیجه گیری را تایید می کند. خطاها سیستماتیک هستند و منبع آن خطاهای مدل اصلاح نشده است. حتی اگر این خطاها ممکن است حداکثر بایاس نزدیک به 3 سانتی متر را ایجاد کنند ( شکل 10 )، بزرگی خطا تنها 15٪ از بزرگی طول موج است. به این ترتیب، می توان آن را برای IAR ناچیز در نظر گرفت.
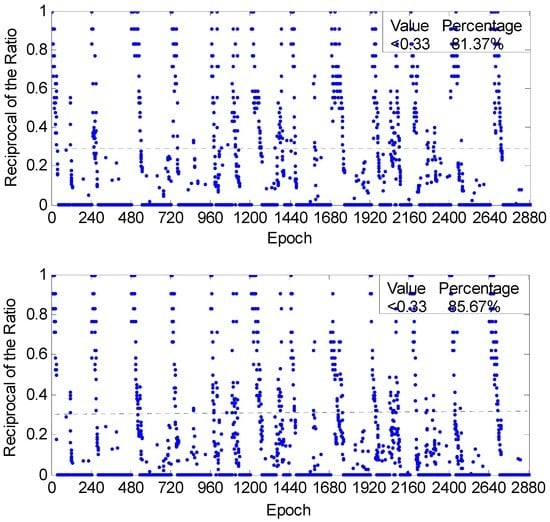
شکل 11 تخمین ابهام کلی را با متقابل نتایج نسبت منعکس می کند. نتایج متقابل که کمتر از 0.33 از روش جدید است، 4.3 درصد بیشتر از روش قدیمی است. این نتایج نشان میدهد که TFFS با محدودیتهای یونوسفر میتواند با مقایسه با نتایج بدون استفاده از محدودیتهای یونوسفر در هر مورد تجربی، 10 دوره را به طور مساوی نجات دهد، که بیشتر تأیید میکند که محدودیتهای یونوسفر برای IAR مفید هستند.
روش پیشنهادی جدید نیز در خطوط پایه BJF1-BJXT، SHA1-ZJKD، WUH1-HBF2 و CHA1-CHSW اعمال می شود. طول خط پایه و TFFS آنها در جدول 4 خلاصه شده است .
برگرفته از جدول 4، روش ما زمانی که طول خط پایه حدود 166 کیلومتر است عملکرد بهینه را دارد. هنگامی که طول خط پایه بیش از 166 کیلومتر باشد، با افزایش طول خط پایه، بهبود TFFS حاصل از روش جدید ما از 26٪ به 13٪ کاهش می یابد. هنگامی که طول خط پایه کمتر از 166 کیلومتر باشد، بهبود TFFS حاصل از روش ما از 10٪ به 26٪ افزایش می یابد. هنگامی که طول خط پایه کمتر از 100 کیلومتر است، عملیات دو دیفرانسیل به حذف برخی از خطاهای مشترک کمک می کند، بنابراین TFFS تنها در صورت استفاده از روش متداول مبتنی بر هندسه به حدود 20 دقیقه محدود می شود، روش ما به نظر نمی رسد کمک کند. تحت این شرایط خیلی زیاده هنگامی که طول خط پایه بیشتر از 200 کیلومتر باشد، وضوح ابهام به راحتی تحت تأثیر برخی از خطاهای مدل نشده (یا به درستی مدل نشده) قرار می گیرد. تحت این شرایط،
6. خلاصه
TCARهای فعلی که تحت تأثیر باقیماندههای یونوسفر DD هستند، برای موفقیت IAR نیاز به جمعآوری دورههای طولانی داده دارند. الگوریتمهای IAR فعلی معمولاً 20 تا 25 دقیقه طول میکشند که برای موقعیتیابی سریع کمی طولانی است. برای کوتاه کردن زمان IAR، ما یک الگوریتم TCAR جدید با اضافه کردن محدودیتهای اطلاعات یونوسفر واقعی پیشنهاد میکنیم. ما روش های فعلی TCAR را در سه جنبه اصلاح کردیم. ابتدا، یک مدل یونوسفر جدید برای تخمین تاخیر یونوسفر DD توسعه یافته است. در مقایسه با روشهای ترکیبی قبلی، مشاهدات فازی و شبه اصلی برای افزایش درجات آزادی و به حداقل رساندن محدودیتهای نویز معرفی شدهاند. با انجام این کار، برآورد تاخیر یونوسفر در سطح جهانی بهینه شده است. هم مشتقات نظری و هم نتایج تجربی نشان میدهند که دقت تأخیر یونوسفر برآورد شده از مدل جدید ما 20 درصد بیشتر از روش ترکیبی یونوسفر فعلی است. دوم، اطلاعات یونوسفری متفاوت با دوره برای هموارسازی تاخیر یونوسفر با استفاده از الگوریتم هچ استفاده میشود. با استفاده از مشتقات نظری و آزمونهای حساسیت، متوجه شدیم که مناسبترین طول هموارسازی 16 دوره است و تاخیر یونوسفری هموار میتواند به بزرگی دقت تعریفشده با نزدیکترین سانتیمتر برسد. برای مواردی که در آن ابهامات WL بهطور اشتباه تعیینشده، دقت تخمینهای تاخیر یونوسفری هموار را بدتر میکند، ما همچنین مجموعهای از تشخیص خطا و قطعنامهها را پیشنهاد کردیم. سوم، تأخیرهای یونوسفر هموار به دست آمده از مرحله 2 به عنوان مقادیر قابل مشاهده شبه پرتقالی در نظر گرفته می شوند و برای تقویت معادله مشاهده اصلی به مدل اصلی اضافه می شوند، بنابراین مدل مبتنی بر هندسه فعلی به یک مدل وزنی یونوسفر گسترش می یابد. نتایج نشان می دهد که این مدل می تواند کارایی همگرایی مجهولات، به ویژه مجهولات یونوسفری را بهبود بخشد. این مدل شرایط مطلوبی را برای IAR سریع و موفق ایجاد می کند. پس از سه اصلاح فوق، الگوریتم TCAR فرموله شده جدید، زمان همگرایی IAR را 20 درصد در مقایسه با روش TCAR فعلی کاهش می دهد. اگر از مدل جدید یونوسفر برای تخمین تاخیر یونوسفر قبل از فرآیند فیلتر کردن استفاده کنیم، انتظار میرود زمان همگرایی کوتاهتر باشد. بنابراین مدل مبتنی بر هندسه فعلی را به یک مدل وزندار یونوسفر گسترش میدهد. نتایج نشان می دهد که این مدل می تواند کارایی همگرایی مجهولات، به ویژه مجهولات یونوسفری را بهبود بخشد. این مدل شرایط مطلوبی را برای IAR سریع و موفق ایجاد می کند. پس از سه اصلاح فوق، الگوریتم TCAR فرموله شده جدید، زمان همگرایی IAR را 20 درصد در مقایسه با روش TCAR فعلی کاهش می دهد. اگر از مدل جدید یونوسفر برای تخمین تاخیر یونوسفر قبل از فرآیند فیلتر کردن استفاده کنیم، انتظار میرود زمان همگرایی کوتاهتر باشد. بنابراین مدل مبتنی بر هندسه فعلی را به یک مدل وزندار یونوسفر گسترش میدهد. نتایج نشان می دهد که این مدل می تواند کارایی همگرایی مجهولات، به ویژه مجهولات یونوسفری را بهبود بخشد. این مدل شرایط مطلوبی را برای IAR سریع و موفق ایجاد می کند. پس از سه اصلاح فوق، الگوریتم TCAR فرموله شده جدید، زمان همگرایی IAR را 20 درصد در مقایسه با روش TCAR فعلی کاهش می دهد. اگر از مدل جدید یونوسفر برای تخمین تاخیر یونوسفر قبل از فرآیند فیلتر کردن استفاده کنیم، انتظار میرود زمان همگرایی کوتاهتر باشد. پس از سه اصلاح فوق، الگوریتم TCAR فرموله شده جدید، زمان همگرایی IAR را 20 درصد در مقایسه با روش TCAR فعلی کاهش می دهد. اگر از مدل جدید یونوسفر برای تخمین تاخیر یونوسفر قبل از فرآیند فیلتر کردن استفاده کنیم، انتظار میرود زمان همگرایی کوتاهتر باشد. پس از سه اصلاح فوق، الگوریتم TCAR فرموله شده جدید، زمان همگرایی IAR را 20 درصد در مقایسه با روش TCAR فعلی کاهش می دهد. اگر از مدل جدید یونوسفر برای تخمین تاخیر یونوسفر قبل از فرآیند فیلتر کردن استفاده کنیم، انتظار میرود زمان همگرایی کوتاهتر باشد.
به طور خلاصه، ما از نظر تئوری و عملی، امکان استفاده از یک مدل یونوسفر جدید را به عنوان محدودیتهایی برای سرعت بخشیدن به IAR بررسی کردیم. مزیت مستقیم این است که مدل جدید زمان IAR را 20٪ در مقایسه با روش TCAR فعلی کاهش می دهد. علاوه بر این، اطلاعات دقیقی را برای بررسی بیشتر موقعیت نسبی خط پایه طولانی، به ویژه برای سیستم Beidou، که دارای داده های فرکانس سه گانه در همه ماهواره ها است، ارائه می دهد. تأخیر یونوسفری مورد استفاده در محدودیتها در زمان واقعی توسط روش ما ارائه میشود، که به عنوان یک روش اختیاری برای کمک به موقعیتیابی نسبی بلادرنگ عمل میکند. ما همچنین یک استراتژی جدید برای تخمین تاخیر یونوسفر DD با دقت نزدیکترین سانتی متر ارائه می دهیم که انتظار می رود برای مطالعه مستقیم یونوسفر مفید باشد.






بدون نظر