

خلاصه
نظارت مستمر ؛ برنامه های کاربردی مبتنی بر مکان ؛ پرس و جوی معکوس نزدیکترین همسایه الگوریتم خروج ایمن ; محاسبات تلفن همراه ; شبکه جاده ای
1. معرفی
-
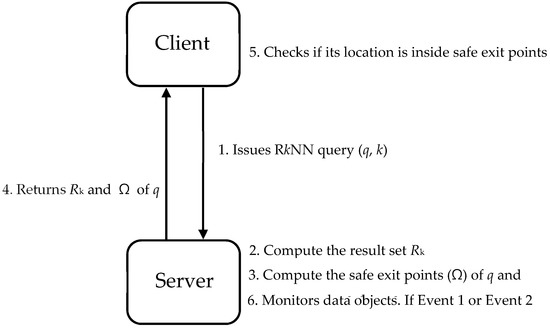
ما چارچوبی را برای نظارت مستمر پرس و جوهای Rk NN ارائه می کنیم که در آن اشیاء پرس و جو و داده در یک شبکه جاده حرکت می کنند.
-
الگوریتم ما پرس و جوهای MR k NN و BR k NN را برای مقادیر دلخواه k پردازش می کند.
-
ما قوانین هرس جدیدی را ارائه می کنیم که محاسبه نقاط خروج ایمن را با به حداقل رساندن اندازه شبکه هرس نشده و تعداد اشیاء بهینه می کند.
-
ما گسترش الگوریتم پیشنهادی را به یک شبکه جاده هدایتشده نشان میدهیم که در آن هر بخش جاده جهتگیری خاصی دارد و به یک شبکه جاده پویا که در آن وزن شبکه بسته به شرایط ترافیک تغییر میکند.
-
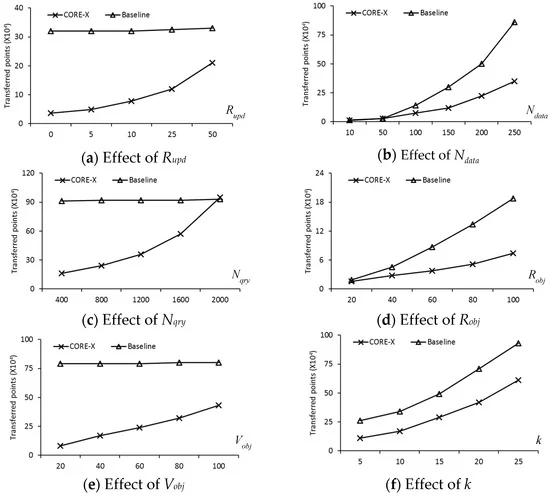
ما از طریق یک ارزیابی تجربی گسترده تأیید میکنیم که الگوریتم پیشنهادی از نظر هزینههای ارتباطی و محاسباتی برای اکثر تنظیمات، از الگوریتم پیشرفته برتری دارد.
2. کارهای مرتبط
2.1. الگوریتم هایی برای پردازش پرس و جوی معکوس پیوسته نزدیکترین همسایه در فضای اقلیدسی
2.2. الگوریتم هایی برای پردازش پرس و جوی معکوس پیوسته نزدیکترین همسایه در شبکه های جاده ای
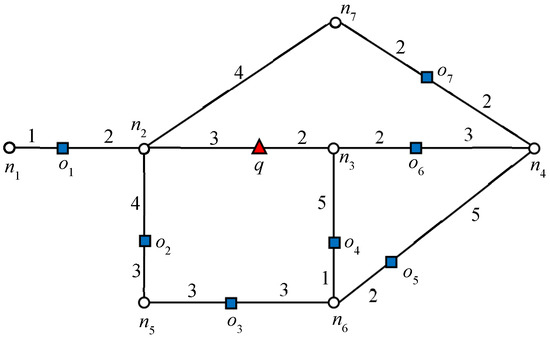
3. مقدمات
3.1. تعریف اصطلاحات و نمادها
3.2. شرح مشکل
4. الگوریتم خروج ایمن برای جابجایی پرس و جوهای R k NN و جابجایی اشیاء
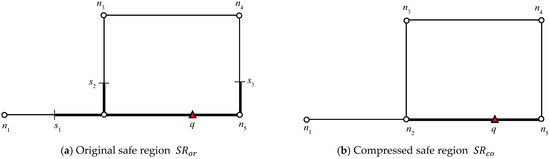
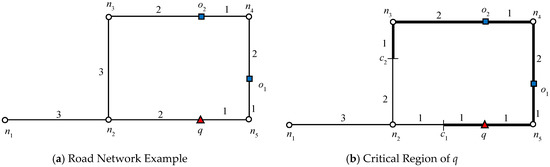
4.1. منطقه امن برای جابجایی q
| الگوریتم 1: محاسبه مناطق امن (اسکلت) | |||
| ورودی: O : اشیاء داده، q : شی پرس و جو، k : عدد صحیح | |||
| خروجی: SR : منطقه امن | |||
| 1: | مجموعه شی O“← r o a dn e t w o r k ( O , q، ک )�′←�����������(�,�,�) | ||
| 2: | مجموعه شی O+← {o+∈O“| دi s t ( o , q) < دمن نیستم ( o , _ok + 1) }�+←{�+∈�′|����(�,�)<����(�,��+1)} | ||
| 3: | مجموعه شی O–← {o–∈O“| دi s t ( o , q) > دمن نیستم ( o , _oک) }�−←{�−∈�′|����(�,�)>����(�,��)} | ||
| 4: | در حالی که O+�+یا O–�−انجام غیر خالی است | ||
| 5: | هدف – شی o = p i c k o b j e c t (O+، O–)�=����������(�+, �−) | ||
| 6: | اگر o ∈O+�∈�+سپس | ||
| 7: | منآر+← c o m p u t eIR (O+،O–، ک )��+←���������(�+,�−,�) | ||
| 8: | اسR ←SR∩ I _آر+��←��∩��+ | ||
| 9: | دیگر | ||
| 10: | منآر–← c o m p u t e IR (O+،O–، ک )��−←���������(�+,�−,�) | ||
| 11: | اسR ← SR – ∪ I آر–��←��− ∪��− | ||
| 12: | پایان در حالی که | ||
| 13: | SR را برگردانید | ||
4.1.1. تعیین اشیاء مفید
| الگوریتم 2: پاسخ دادن به شی ( q , k ) | |||||||
| ورودی: q: محل پرس و جو، k : عدد صحیح | |||||||
| خروجی: R k : نتیجه پرس و جو (اشیاء پاسخ) | |||||||
| 1: | qu e u e ← ∅�توهتوه←∅ | /* صف یک صف اولویت است با یال های مرتب شده بر اساس فاصله تا q */ | |||||
| 2: | آک← ∅آک←∅ | /* مجموعه ای از اشیاء پاسخ*/ | |||||
| 3: | v i s i t e d← ∅�منسمنتیهد←∅ | /*اطلاعات لبه های بازدید شده را ذخیره می کند */ | |||||
| 4: | صف فشار ( q ، لبه فعال ) | /* لبه فعال نشان دهنده لبه فعال است */ | |||||
| 5: | در حالی که صف خالی نیست انجام دهید | ||||||
| 6: | ⟨پآ، e dge ⟩ ← qتو ای تو ای _ p o p ( )〈پآ،هد�ه〉←�توهتوه.پ�پ() | ||||||
| 7: | اگر ⟨پآ، e dge ⟩ ∉ v i s i t e d〈پآ،هد�ه〉∉�منسمنتیهد سپس | ||||||
| 8: | v i s i t e d← v i s i t e d∪ { e dge }�منسمنتیهد←�منسمنتیهد∪{هد�ه} | ||||||
| 9: | اگر لبه حاوی یک شی داده o باشد | ||||||
| 10: | k NN( o ): تأیید ( o ، k ، q ) | ||||||
| 11: | اگر q با تأیید کشف شود | ||||||
| 12: | آرک←آرک∪ oآرک←آرک∪� | ||||||
| 13: | دیگر | ||||||
| 14: | qتو ای تو ای _ صمیمانه ⟨ _ _ _nβ، e dge⟩ _�توهتوه.پتوسساعت〈��،هد�ه〉 | ||||||
| 15: | پایان در حالی که | ||||||
| 16: | R k را برگردانید | ||||||
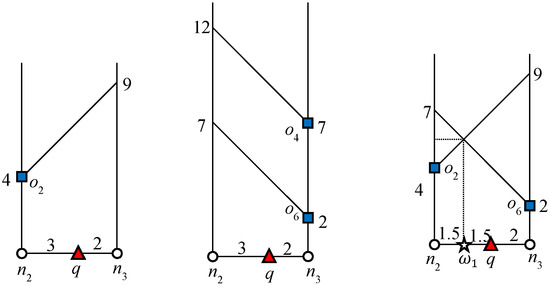
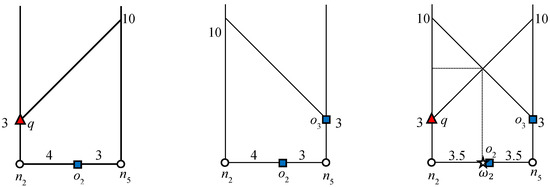
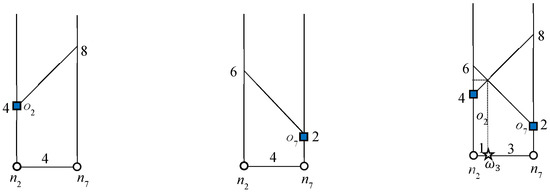
4.1.2. منطقه تأثیر محاسباتی برای اشیاء مفید
در اینجا، o k+1 نشان دهنده ( k +1)امین نزدیکترین همسایه o است . طبق تعریف، ناحیه تأثیر اشیاء پاسخ شامل تمام نقاطی است که برای آنها q= نن(o+)�=نن(�+). یعنی شامل تمام نقاطی است که شی o باقی می ماند o+�+.
| الگوریتم 3: محاسبه منطقه تأثیر ( O+�+، O–�–، ک ) | ||
| ورودی : O+�+: پاسخ مجموعه اشیاء، O–�–: مجموعه اشیاء بدون پاسخ، k: عدد صحیح | ||
| خروجی : منآر+منآر+ناحیه تأثیرگذاری اشیاء پاسخ، منآر–منآر–منطقه تحت تأثیر اشیاء بدون پاسخ | ||
| 1: | منآر+← ∅منآر+←∅، منآر–← ∅منآر–←∅ | |
| /* ناحیه نفوذ اشیاء پاسخ */ | ||
| 2: | برای هر کدام O+�+ انجام دادن | |
| 3: | شبکه جاده را تا o k +1 گسترش دهید . | |
| 4: | د← دمن نیستم ( o , _ok + 1) د←دمنستی(�،�ک+1) | |
| 5: | علامت گذاری محدوده (o, d)؛ | |
| 6: | منآر+← منآر+∪ منآر+منآر+←منآر+∪منآر+; | |
| 7: | پایان برای | |
| /* ناحیه نفوذ اشیاء بدون پاسخ */ | ||
| 8: | برای هر کدام O–�– انجام دادن | |
| 9: | شبکه راه را تا o k گسترش دهید . | |
| 10: | د← دمن نیستم ( o , _oک)د←دمنستی(�،�ک); | |
| 11: | علامت گذاری محدوده ( o , d ); | |
| 12: | منآر–← منآر–∪ منآر–منآر–←منآر–∪منآر–; | |
| 13: | پایان برای | |
| 14: | R بازگشت منآر+منآر+و منآر–منآر– | |
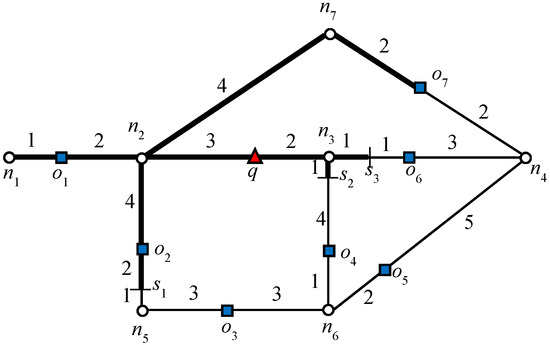
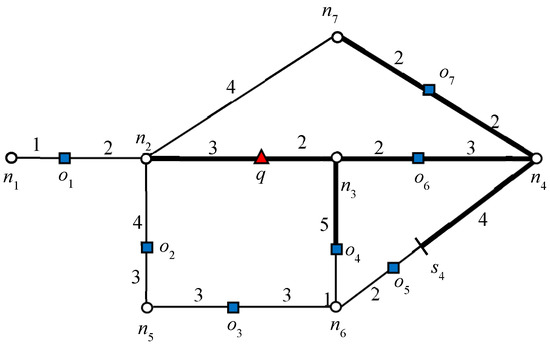
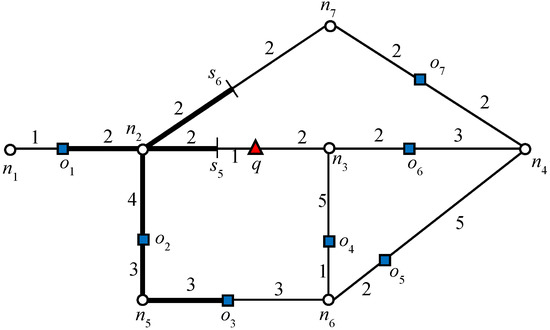
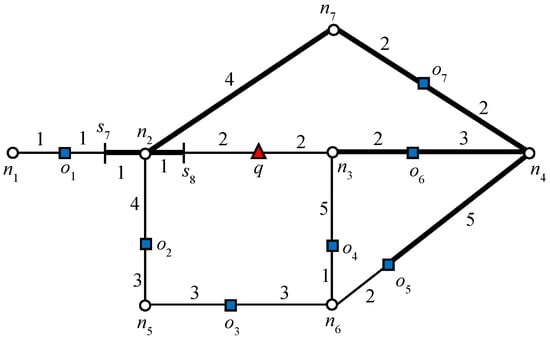
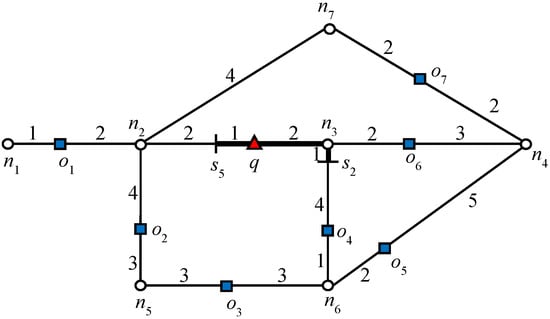
4.1.3. محاسبه نقاط خروج ایمن
جایی که منآر+منآر+نشان دهنده ناحیه تأثیر اشیاء پاسخ و منآر–منآر–منطقه تأثیر اشیاء بدون پاسخ را نشان می دهد. از تعریف، میتوان دریافت که هر نقطهای که در تقاطع ناحیه تأثیر شیء پاسخ قرار دارد O+�+به عنوان یک منطقه امن در نظر گرفته می شود و هر نقطه p که در ناحیه نفوذ شی غیر پاسخ قرار دارد O–�–باید مستثنی شوند.
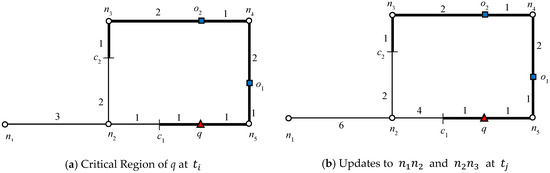
4.2. نظارت بر اشیاء داده
4.2.1. محاسبه نقاط خروج ایمن اشیاء مفید ( UO )
جایی که ممنن( )ممنن()و میک X( )مآایکس()حداقل و حداکثر مقدار آرایه ورودی را به ترتیب برمی گرداند. یعنی یک نقطه خروجی امن ω�نقطه مرکزی است، یعنی یک X( د( ω ,o+1) ، … ، د( ω ,o+ک) )=ممنن( د( ω ,o–k + 1) ، … ، د( ω ,o–| o |) )آایکس(د(�،�1+)،…،د(�،�ک+))=ممنن(د(�،�ک+1–)،…،د(�،�|�|–))، بین دورترین شی پاسخ و نزدیکترین شی بدون پاسخ.
4.2.2. نظارت بر اشیاء هرس شده
4.3. برنامه های افزودنی
4.3.1. پرس و جوهای R k NN در شبکه های جاده ای جهت دار
4.3.2. پرس و جوهای R k NN در شبکه های جاده ای پویا
4.3.3. پرس و جوهای دو رنگی R k NN
-
در تعیین فاز UO، فقط اشیاء از نوع S به عنوان اشیاء مسدود کننده برای هرس شبکه در نظر گرفته می شوند. بنابراین، یک گره بسته را می توان به عنوان یک گره n که یک شی برای آن وجود دارد، دوباره تعریف کردs ∈ Sس∈اسبه طوری که دi s t ( n , s ) < دi s t ( n , q)دمنستی(�،س)<دمنستی(�،�). باقی مانده لما 1 بدون تغییر باقی می ماند. اشیاء نوع O که در شبکه هرس نشده قرار دارند، به عنوان اشیاء UO در نظر گرفته می شوند، در حالی که اشیاء نوع S در شبکه هرس نشده، اشیاء فعال نامیده می شوند.
-
مشابه با MR k NN، اشیاء UO به اشیاء پاسخی و غیر پاسخی طبقه بندی می شوند. اشیاء پاسخ برای پرس و جوهای BRkNN را می توان به عنوان یک شی o برای آن تعریف کرددi s t ( o , q) < دمن نیستم ( o , _سk + 1)دمنستی(�،�)<دمنستی(�،سک+1)که در آن s k +1 ( k +1)امین شیء NN o در مجموعه داده S است . به طور مشابه، یک شیء بدون پاسخ به عنوان یک شیء o تعریف می شود که دi s t ( o , q) > دمن نیستم ( o , _سک)دمنستی(�،�)>دمنستی(�،سک)، که در آن s k k امین شی NN o در مجموعه داده S است .
-
منطقه تأثیر یک شی پاسخ به صورت تعریف می شود منآر+= { p | دمن نیستم ( _o+، ص ) ≤دمن نیستم ( _o+،سk + 1) }منآر+={پ|دمنستی(�+،پ)≤دمنستی(�+،سک+1)}، جایی که دمن نیستم ( _o+،سk + 1)دمنستی(�+،سک+1)فاصله بین شی پاسخ و ( k +1)امین NN در مجموعه S است . به طور مشابه، منطقه تأثیر یک شیء بدون پاسخ به این صورت تعریف می شود منآر–= { p | دمن نیستم ( _o–، ص ) ≤دمن نیستم ( _o–،سک) }،منآر–={پ|دمنستی(�–،پ)≤دمنستی(�–،سک)}،جایی که دمن نیستم ( _o–،سک)دمنستی(�–،سک)فاصله بین شی بی پاسخ و k نزدیکترین شی در مجموعه S است . فاز 3 برای BR k NN بدون تغییر باقی می ماند.
-
محاسبه نقاط خروج ایمن برای UO یکسان است. تنها تفاوت این است که برای BR k NN، دورترین شی پاسخ و نزدیکترین شی غیر پاسخ متعلق به مجموعه S است . بنابراین، نقطه خروج امن نقطه مرکزی بین است س+fس�+و س–nس�–.
-
ناحیه امن یک شی فعال را می توان به روشی مشابه q محاسبه کرد زیرا هر دو به یک نوع داده تعلق دارند.
4.4. تحلیل پیچیدگی های زمانی و مکانی
5. ارزیابی عملکرد
5.1. تنظیمات آزمایشی
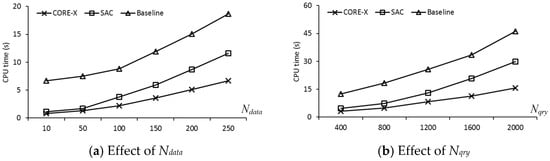
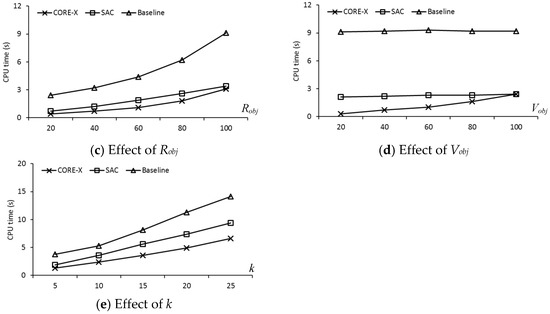
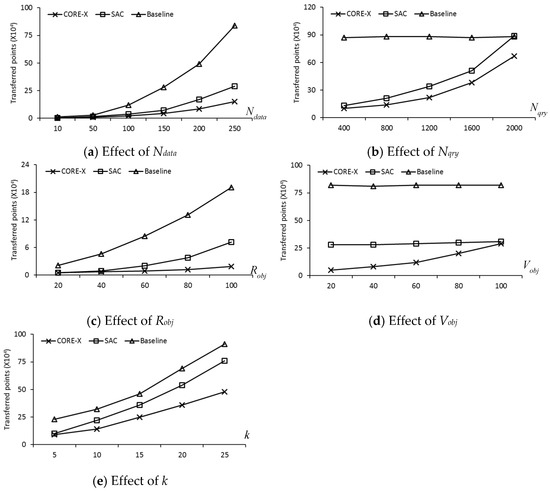
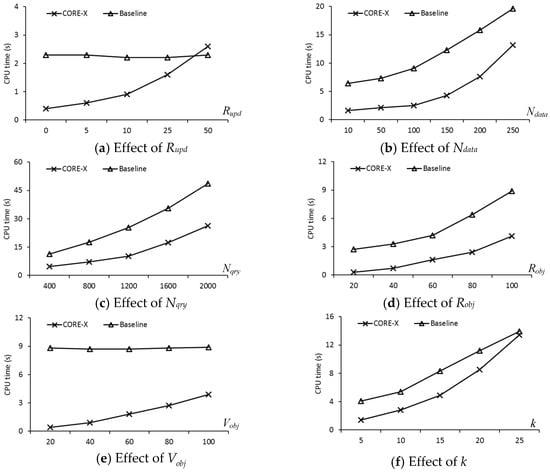
5.2. نتایج تجربی برای شبکه های جاده ایستا
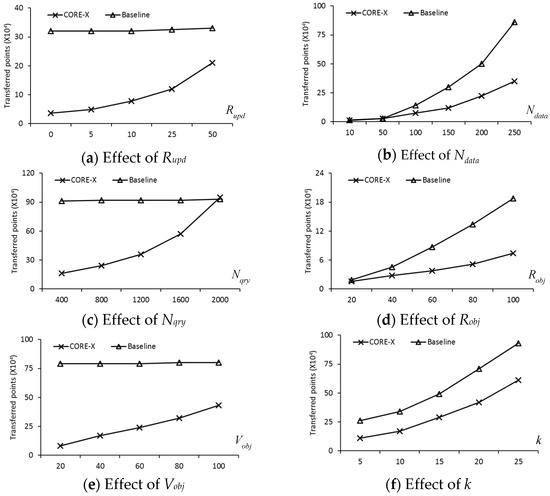
5.3. نتایج تجربی برای شبکه های جاده ای پویا
6. نتیجه گیری
منابع
- سیونزو، دی. بوونانو، آ. D’Urso، M. Palmieri, F. طبقه بندی توزیع شده اهداف متحرک چندگانه با شبکه حسگر بی سیم باینری. در مجموعه مقالات چهاردهمین کنفرانس بین المللی در همجوشی اطلاعات (FUSION)، شیکاگو، IL، ایالات متحده آمریکا، 5-8 ژوئیه 2011; صص 1-8.
- بوونانو، آ. D’Urso، M. پریسکو، جی. فلاکو، م. ملیادو، EF; ماتی، م. پالمیری، اف. Ciuonzo، D. شبکه های حسگر موبایل مبتنی بر سیستم عامل های مستقل برای امنیت داخلی. در مجموعه مقالات کارگاه Tyrrhenian در مورد پیشرفت در رادار و سنجش از دور (TyWRRS)، ناپل، ایتالیا، 12-14 سپتامبر 2012. صص 80-84.
- چو، اچ. کوون، اس. Chung, T. یک الگوریتم خروج ایمن برای نظارت مداوم نزدیکترین همسایه در شبکه های جاده ای. اوباش Inf. سیستم 2013 ، 9 ، 37-53. [ Google Scholar ] [ CrossRef ]
- چو، اچ. ریو، ک. Chung, T. یک الگوریتم کارآمد برای محاسبه نقاط خروج ایمن پرس و جوهای محدوده متحرک در شبکه های جاده هدایت شده. Inf. سیستم 2014 ، 41 ، 1-19. [ Google Scholar ] [ CrossRef ]
- وانگ، اچ. Zimmermann, R. پردازش پرس و جوهای محدوده مبتنی بر مکان پیوسته بر روی اجسام متحرک در شبکه های جاده ای. IEEE Trans. بدانید. مهندسی داده 2011 ، 23 ، 1065-1078. [ Google Scholar ] [ CrossRef ]
- یونگ، دی. ییو، م. Lo, E. یک رویکرد خروج ایمن برای جستجوهای محدوده متحرک مبتنی بر شبکه کارآمد. دانستن داده ها مهندس 2012 ، 72 ، 126-147. [ Google Scholar ] [ CrossRef ]
- ژانگ، جی. زو، ام. پاپادیاس، دی. تائو، ی. لی، دی. پرس و جوهای فضایی مبتنی بر مکان. در مجموعه مقالات کنفرانس بین المللی ACM SIGMOD 2003 در مدیریت داده ها، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 10-12 ژوئن 2003. صص 443-454.
- چیما، م. Lin، MX; ژانگ، ی. ژانگ، دبلیو. Li، X. جستارهای معکوس پیوسته k نزدیکترین همسایگان در فضای اقلیدسی و در شبکه های فضایی. VLDB J. 2012 ، 21 ، 69-95. [ Google Scholar ] [ CrossRef ]
- کورن، اف. Muthukrishnan، S. مجموعه های نفوذ بر اساس پرس و جوهای معکوس نزدیکترین همسایه. در مجموعه مقالات کنفرانس بین المللی ACM SIGMOD در سال 2000 در مورد مدیریت داده ها، دالاس، تگزاس، ایالات متحده آمریکا، 16-18 می 2000. ص 201-212.
- استانویی، آی. آگراوال، اس. Abbadi, A. معکوس کردن پرس و جوهای نزدیکترین همسایه برای پایگاه های داده پویا. در مجموعه مقالات کارگاه ACM SIGMOD در مورد مسائل تحقیقاتی در داده کاوی و کشف دانش، دالاس، تگزاس، ایالات متحده آمریکا، 14 مه 2000. صص 44-53.
- تائو، ی. پاپادیاس، دی. لیان، ایکس. جستجوی k NN در ابعاد دلخواه. در مجموعه مقالات سی امین کنفرانس بین المللی پایگاه های داده بسیار بزرگ، تورنتو، ژاپن، 31 اوت تا 3 سپتامبر 2004. صص 744-755.
- کلاهدوزان، م. شهابی، سی. ورونوی مبتنی بر k نزدیکترین همسایه جستجو برای پایگاه داده شبکه فضایی. در کارگاه ACM SIGMOD در مورد مسائل تحقیقاتی در داده کاوی و کشف دانش، مجموعه مقالات سی امین کنفرانس بین المللی پایگاه های داده بسیار بزرگ، تورنتو، ژاپن، 31 اوت تا 3 سپتامبر 2004 . ACM: نیویورک، نیویورک، ایالات متحده آمریکا؛ صص 840-851.
- گائو، ی. ژنگ، بی. چن، جی. لی، دبلیو. تره فرنگی.؛ لی، Q. جستارهای k معکوس قابل مشاهده – نزدیکترین همسایه. در مجموعه مقالات بیست و پنجمین کنفرانس بین المللی IEEE در زمینه مهندسی داده، شانگهای، چین، 29 مارس تا 2 آوریل 2009. ص 1314–1327.
- لی، جی. فن، پ. لی، ی. Du، J. یک تکنیک کارآمد برای پردازش پیوسته k-نزدیکترین همسایه بر روی اجسام متحرک در یک شبکه جاده ای. در مجموعه مقالات دهمین کنفرانس بین المللی IEEE در زمینه کامپیوتر و فناوری اطلاعات (CIT)، برادفورد، انگلستان، 29 ژوئن تا 1 ژوئیه 2010. صص 627-634.
- آهنگ، ز. Roussopoulos، N. K-نزدیکترین همسایه جستجو برای نقطه جستجوی متحرک. در مجموعه مقالات سمپوزیوم بین المللی در پایگاه های داده مکانی و زمانی (SSTD)، ردوندو بیچ، کالیفرنیا، ایالات متحده آمریکا، 12 تا 15 جولای 2001. ص 79-96.
- سان، اچ. جیانگ، سی. لیو، جی. Sun، L. پرس و جوهای معکوس پیوسته نزدیکترین همسایه در مورد اجسام متحرک در شبکه های جاده ای. در مجموعه مقالات نهمین کنفرانس بین المللی مدیریت اطلاعات عصر وب (WAIM)، Zhangjiajie، هونان، چین، 20-22 ژوئیه 2008.
- ییو، م. مامولیس، ن. پاپادیاس، دی. تائو، ی. نزدیکترین همسایه را در نمودارهای بزرگ معکوس کنید. IEEE Trans. بدانید. مهندسی داده 2006 ، 18 ، 540-553. [ Google Scholar ]
- بنتیس، آر. جنسن، سی. کارچیاوسکاس، جی. Saltenis، S. جستجوهای نزدیکترین همسایه و معکوس نزدیکترین همسایه برای اجسام متحرک. در مجموعه مقالات سمپوزیوم مهندسی و کاربردهای پایگاه داده بین المللی، ادمونتون، AB، کانادا، 17-19 ژوئیه 2002. صص 44-53.
- شیا، تی. Zhang، D. نظارت معکوس مداوم نزدیکترین همسایه. در مجموعه مقالات بیست و دومین کنفرانس بین المللی مهندسی داده (ICDE)، آتلانتا، GA، ایالات متحده آمریکا، 3-7 آوریل 2006. پ. 77.
- کانگ، جی. موکبل، م. شکر، س. شیا، تی. ژانگ، دی. ارزیابی مستمر نزدیکترین همسایگان معکوس تک رنگ و دو رنگ. در مجموعه مقالات بیست و سومین کنفرانس بین المللی مهندسی داده IEEE (ICDE)، استانبول، ترکیه، 16-20 آوریل 2007. ص 806-815.
- وو، دبلیو. یانگ، اف. چان، سی. قهوهای مایل به زرد، K. پیوسته معکوس k -نزدیکترین همسایه نظارت. در مجموعه مقالات نهمین کنفرانس بین المللی مدیریت داده های تلفن همراه (MDM)، پکن، چین، 27-30 آوریل 2008. صص 132-139.
- چیما، م. لین، ایکس. ژانگ، دبلیو. Zhang، Y. منطقه نفوذ: پردازش معکوس k پرس و جوهای نزدیکترین همسایگان. در مجموعه مقالات بیست و هفتمین کنفرانس بین المللی IEEE در مهندسی داده (ICDE)، هانوفر، آلمان، 11-16 آوریل 2011. صص 577-588.
- صفر، م. ابراهیمی، د. پردازش پرس و جوی معکوس نزدیکترین همسایه مبتنی بر Taniar، D. Voronoi در شبکه های فضایی. چندتایی. سیستم 2009 ، 15 ، 295-308. [ Google Scholar ] [ CrossRef ]
- لی، جی. لی، ی. لی، جی. شو، ال. یانگ، ف. نظارت معکوس پیوسته k نزدیکترین همسایه بر روی اجسام متحرک در شبکه های جاده ای. Inf. سیستم 2010 ، 35 ، 860-883. [ Google Scholar ]
- Gotoh, Y. یک روش مسیریابی ساده برای پرس و جوهای k- نزدیکترین همسایه معکوس در شبکه های فضایی. در مجموعه مقالات هفدهمین کنفرانس بین المللی IEEE در مورد سیستم های اطلاعاتی مبتنی بر شبکه، سالرنو، ایتالیا، 10-12 سپتامبر 2014. صص 615-620.
- وانگ، اس. چیما، م. Lin, X. نظارت کارآمد معکوس k- نزدیکترین همسایگان در شبکه های فضایی. محاسبه کنید. J. 2015 ، 58 ، 40-56. [ Google Scholar ] [ CrossRef ]
- آتیک، م. هایلو، ی. آیله، اس. چو، اچ. Chung, T. یک رویکرد خروج ایمن برای نظارت مداوم بر معکوس نزدیکترین همسایگان در شبکه های جاده ای. بین المللی عرب J. Inf. فنی 2015 ، 12 ، 540-549. [ Google Scholar ]
- آتیک، م. چو، اچ. Chung, T. CORE: نظارت مداوم بر معکوس k نزدیکترین همسایه بر روی اجسام متحرک در شبکه های جاده ای. گل میخ. محاسبه کنید. هوشمند 2016 ، 2015 ، 109-124. [ Google Scholar ]
- کورمن، تی. لیزرسون، سی. ریست، آر. Stein, C. Introduction to Algorithms , 3rd ed.; MIT Press and McGraw-Hill: Cambridge, MA, USA, 2009. [ Google Scholar ]
- مجموعه داده های واقعی برای پایگاه های داده فضایی. در دسترس آنلاین: https://www.cs.utah.edu/~lifeifei/SpatialDataset.htm (در تاریخ 2 آوریل 2016 قابل دسترسی است).
- Brinkhoff, T. چارچوبی برای تولید اشیاء متحرک مبتنی بر شبکه. GeoInformatica 2002 ، 6 ، 153-180. [ Google Scholar ] [ CrossRef]

© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر