1. معرفی
فناوری محلی سازی داخلی را می توان برای ارائه اطلاعات موقعیت برای عابران پیاده و حمل و نقل داخلی استفاده کرد. این فناوری چندین سال است که در کاربردهای مختلفی مانند پیمایش عابر پیاده در فرودگاه ها، خرید راهنماها در فروشگاه های بزرگ، تخلیه اضطراری و نجات در شرایط بلایای طبیعی مورد بررسی قرار گرفته است. با این حال، بهبود قابلیت اطمینان فناوری موقعیت یابی داخلی نیز کار دشواری است. از این رو، یک سیستم چند سنسور یکپارچه روشی موثر برای افزایش دقت موقعیت یابی داخل ساختمان است. فیلتر کالمن (فیلتر برای نشان دادن فیلتر کالمن در زیر استفاده می شود) پرکاربردترین روش ترکیب داده ها در سیستم های چند سنسوری یکپارچه است. به دلیل پیچیدگی محیط داخلی، ساخت مدل های دینامیکی و مشاهده ای با دقت بالا دشوار است.
یک سیستم موقعیت یابی داخلی دقیق و قابل اعتماد تک سنسوری هنوز یکی از بزرگترین چالش ها در زمینه ناوبری برای خدمات مبتنی بر مکان است. برای جبران معایب سیستم های تک سنسور، حسگرهای موقعیت یابی داخلی به طور فزاینده ای یکپارچه می شوند. یک سیستم محلی سازی یکپارچه سه بعدی داخلی پیشنهادی برای وسایل نقلیه چرخدار از IEEE 802.11 WLAN (WiFi) [ 1 ، 2 ] و سنسورهای اینرسی کاهش یافته مبتنی بر سیستم میکرو الکترومکانیکی کم هزینه (MEMS) استفاده می کند. واحد اندازه گیری اینرسی WiFi/MEMS (IMU) بر اساس یک نسخه تطبیقی بهینه از یک الگوریتم فیلتر ذرات مخلوط برای تخمین وضعیت است [ 3]]. اطلاعات موقعیت با ادغام یک برآوردگر موقعیت یک ربات استاندارد با یک برآوردگر بیزی با استفاده از نشانگر قدرت سیگنال دریافتی (RSSI) [ 4 ] محاسبه شد. یک روش تخمین موقعیت مبتنی بر IMU با استفاده از RSSI بهدستآمده از چندین برچسب شناسایی فرکانس رادیویی فعال (RFID) که در مکانهای شناخته شده در یک ساختمان قرار داده شدهاند، کمک گرفت. سیستم IMU/RFID متصل به هم، رانش معمولی راهحلهای IMU را که باعث خطاهای موقعیتیابی معمولی در طول مسیر راه رفتن تقریباً 1.5 متری میشد، حذف کرد [ 5 ]. یک سیستم یکپارچهسازی بصری-اینرسی جدید نیز برای ناوبری انسان در محیطهای آزاد ارائه شد که در آن اندازهگیریهای حسگرهای بصری اینرسی و تک چشمی پوشیدنی ادغام شدهاند [ 6]]. از آنجا که هر دو نوع سیستم دارای مزایا و معایب منحصربهفردی هستند، یک روش ترکیبی مبتنی بر احتمال حداکثری که یک روش معمولی موقعیتیابی WiFi داخلی را با روش محاسبه مرده عابر پیاده (PDR) ادغام میکند نیز ارائه شد. نقطه قوت روش PDR این است که می تواند ضعف روش موقعیت یابی WiFi را کاهش دهد [ 7 ]. یک الگوریتم فیلتر ذرات نیز برای دستیابی به عملکرد موقعیت یابی خوب در موقعیت های داخلی ارائه شده است. روش پیشنهادی مبتنی بر ادغام مشاهدات IMU، قدرت سیگنال رادیویی یک شبکه استاندارد بی سیم و اطلاعات نقشه است [ 8]]. علاوه بر این، یک روش موقعیتیابی داخلی هیبریدی بدون کالیبراسیون که از مشاهدات WLAN (شبکههای محلی بیسیم)، چراغهای بیسیم ارزان قیمت BLE (بلوتوث کمانرژی) و INS (سیستم ناوبری اینرسی) استفاده میکند، ارائه شد. این تحقیق از یک الگوریتم فیلتر غیرخطی بیزی مبتنی بر شبکه برای ترکیب اطلاعات حسگر استفاده می کند [ 9 ]. تطبیق نقشه به عنوان فرآیند همبستگی دو مجموعه از اطلاعات موقعیت جغرافیایی تعریف می شود. همراه با رویکرد تخمین محاسبه مرده، تطبیق نقشه به طور قابل توجهی دقت کلی موقعیت یابی را بهبود می بخشد [ 10]. کیفیت نقشه رادیویی موجود با استفاده از اثرانگشت وایفای جمعآوریشده که پس از پردازش آفلاین همراه با مسیر عابر پیاده ثبتشده بهبود مییابد. راه حل بر روشی متمرکز است که نیازی به مداخله انسانی ندارد و بنابراین کاربران نهایی مجبور نیستند مکان خود را گزارش کنند [ 11 ]. یک الگوریتم جدید محلیسازی داخلی با استفاده از تلفنهای هوشمند که در آن سیگنالهای WiFi، جهتگیری و بصری با هم ترکیب میشوند، برای بهبود عملکرد محلیسازی پیشنهاد شد. پایگاه داده مرجع به عنوان یک درخت سیگنال با هزینه محاسباتی کمتر ساخته شده است، زیرا WiFi و سیگنال های جهت گیری تصاویر مرجع را از قبل خوشه بندی می کنند [ 12]]. یک سیستم تطبیق مغناطیسی (MM) با کمک WiFi برای موقعیت یابی عابر پیاده در داخل ساختمان پیشنهاد شد. این روش هم نرخ عدم تطابق و هم بار محاسباتی MM را با استفاده از اطلاعات موقعیتیابی WiFi برای کاهش پوشش جستجوی MM کاهش میدهد [ 13 ]. یک الگوریتم موقعیتیابی داخلی قوی که حسگرهای کمهزینه را با تطبیق نقشه و یک روش موقعیتیابی بیسیم ادغام میکند، ارائه شد که در آن یک نقشه داخلی با اطلاعات موقعیتیابی WiFi ترکیب میشود تا طرح قابلاعتمادتری بر اساس وضعیت داخلی به دست آید [14 ] . علاوه بر این، یک سیستم یکپارچه سازی بهبود یافته برای اثر انگشت WiFi و حسگرهای MEMS برای موقعیت یابی داخلی ارائه شد. روش پیشنهادی فضای جستجو را برای اثر انگشت WiFi محدود می کند و سرعت الگوریتم و دقت موقعیت یابی را بهبود می بخشد [ 15، 16 ]. یک سیستم محلیسازی ترکیبی ارائه شد که اطلاعات موقعیت و کمک ناوبری را به عابرین پیاده در محیطهای داخلی پویا، مانند سایتهای ساختوساز، با ترکیب یک IMU و یک شبکه فضایی غیریکنواخت UWB ارائه میکند [17 ] . یک الگوریتم همجوشی چند حسگر مبتنی بر فیلترهای ذرات برای محلیسازی ربات متحرک در محیطهای شلوغ پیشنهاد شد. این پیشنهاد به طور تجربی با یک فاصله یاب لیزری، یک کارت WiFi، یک قطب نما مغناطیسی و یک شبکه چند دوربین خارجی تایید شد [ 18 ]. با سنسورهای بیشتر یکپارچه شده برای موقعیت یابی داخلی، یک مدل فیلتر بسیار قابل اعتماد و دقیق اهمیت فزاینده ای دارد.
دیوارهای ساختمان مانند آینه برای سیگنال های WiFi در یک محیط داخلی عمل می کنند. یک سیگنال منعکس شده ممکن است به عنوان یک سیگنال واقعی در نظر گرفته شود، که یک نقطه پرت بزرگ را در موقعیت یابی WiFi معرفی می کند [ 19]]. در عین حال، یک محیط داخلی پیچیده باعث کاهش دقت مدل پویا می شود. فیلترهای تطبیقی و قوی به ترتیب قادر به تضعیف تأثیر خطا در مدل های دینامیکی و مشاهده هستند. فیلترهای تطبیقی کالمن و فیلترهای قوی کالمن می توانند به ترتیب برای کاهش اثرات خطای بزرگ در مدل های دینامیکی و مشاهده ای استفاده شوند. اشکال بسیاری از فیلترهای تطبیقی و فیلترهای قوی کالمن در ادبیات ارائه شده است. به عنوان مثال، یک فیلتر قوی تطبیقی مبتنی بر یک تخمین ماکزیمم احتمال قوی پیشنهاد شد و برای موقعیتیابی و اندازهگیری ژئودتیک سینماتیکی اعمال شد. این روش نه تنها می تواند سهم بین پارامترهای به روز شده و اندازه گیری را متعادل کند، بلکه تأثیر مقادیر پرت اندازه گیری را نیز کاهش می دهد [ 20]]. یک برآوردگر پارامتر قوی جدید برای تنظیم مشاهدات مرتبط بر اساس یک مدل کاهش دو عاملی عناصر وزن ایجاد شد. ماتریس وزن معادل جدید، متشکل از عناصر وزن دو فاکتور، تقارن را حفظ می کند و ضرایب همبستگی اصلی را بدون تغییر نگه می دارد [ 21 ]. یک فیلتر قوی تطبیقی با عوامل تطبیقی چندگانه بر اساس اصول فیلتر کالمن تطبیقی و برآورد قوی دو عاملی برای مشاهدات همبسته نیز پیشنهاد شد. این فیلتر و فیلتر با یک عامل تطبیقی یکپارچه می توانند در کاربردهای عملی ادغام شوند [ 22 ]. فیلترهای قوی کالمن در دهههای گذشته برای کاربردهای مختلف مانند همترازی در حرکت INS مورد بررسی قرار گرفتهاند [ 23].]، SINS/SAR (سیستم ناوبری اینرسی به پایین/رادار دیافراگم مصنوعی) سیستمهای ناوبری یکپارچه [ 24 ]، تخمین بیدرنگ ساعتهای ماهوارهای [ 25 ]، موقعیتیابی نقطهای دقیق (PPP) [ 26 ] و نگرش ماهوارهای کوچک برآورد [ 27 ]. یک فیلتر کالمن قوی با استفاده از آزمون Chi-squared برای تشخیص نقاط پرت اندازه گیری پیشنهاد شد [ 28 ]. مربع فاصله ماهالانوبیس از مشاهده تا پیشبینی آن، که به عنوان آماره آزمایشی برای تشخیص نقاط پرت تعریف میشود، باید مجذور کای توزیع شده با ابعاد بردار مشاهده برابر با درجات آزادی باشد.
در مطالعه حاضر، یک فیلتر تطبیقی بر اساس سناریو و تشخیص حالت حرکت برای بهبود توانایی تطبیقی مدل پویا در یک سیستم یکپارچه WiFi/PDR پیشنهاد شدهاست. در همان زمان، فیلتر تطبیقی پیشنهاد شده در مطالعه و فیلتر قوی از [ 28 ] در سیستم یکپارچه WiFi/PDR ترکیب و پیادهسازی شدهاند تا دقت اطلاعات موقعیت را برای محلیسازی داخلی بهبود بخشد. استفاده از فیلتر تطبیقی و فیلتر قوی میتواند قابلیت اطمینان محلیسازی فضای داخلی را افزایش دهد، که این بهبود سیستم یکپارچه WiFi/PDR است. ادامه این مقاله به شش بخش تقسیم شده است. مدل های موقعیت یابی داخلی از جمله فناوری موقعیت یابی WiFi و PDR مبتنی بر اندازه گیری اینرسی در بخش 2 بررسی می شوند.. بخش 3 سیستم یکپارچه WiFi/PDR و همچنین مدل پویا، مدل مشاهده و الگوریتم فیلتر فیوژن سیستم یکپارچه را توضیح می دهد. بخش 4 فیلترهای تطبیقی و قوی پیشنهادی را بر اساس سناریو و تشخیص حالت حرکت ارائه میکند. سپس نتایج آزمایشات میدانی در بخش 5 ارائه و تجزیه و تحلیل می شود و پس از آن خلاصه ای از نتیجه گیری های اصلی در بخش 6 ارائه می شود .
2. مدل موقعیت یابی داخلی
2.1. فناوری موقعیت یابی وای فای
روش موقعیت یابی داخلی بر اساس اطلاعات اثر انگشت شامل دو مرحله است: مرحله آموزش داده آفلاین و مرحله موقعیت یابی بلادرنگ. در طول مرحله آموزش داده آفلاین، بسیاری از نقاط مرجع (RP) در ناحیه مورد نظر برای جمع آوری اطلاعات سیگنال WiFi مانند قدرت سیگنال و موقعیت نقاط دسترسی (APs) تنظیم می شوند. مختصات RP ها از قبل مشخص است. پس از محاسبه توزیع قدرت سیگنال همه AP ها از RP های مختلف، پایگاه داده اثر انگشت برای موقعیت یابی داخلی در منطقه مورد نظر ساخته می شود. در مرحله موقعیتیابی بلادرنگ، موقعیتهای دستگاه تلفن همراه کاربر هدف با تطبیق اطلاعات سیگنال وایفای بیدرنگ با پایگاه داده اثرانگشت بهدست میآید.
در اینجا از الگوریتم k نزدیکترین همسایه (KNN) استفاده شده است. یک شی با اکثریت آرای همسایههایش طبقهبندی میشود، که در آن شی به کلاسی نسبت داده میشود که در میان k نزدیکترین همسایههایش رایجترین است. منطقه هدف به یک شبکه منظم تقسیم می شود و نقاط زاویه ای به عنوان RPs تنظیم می شوند. اطلاعات اثر انگشت شامل اندازه گیری RSSI و مختصات RP است. اطلاعات سیگنال برای i RP را می توان به صورت [ 29 ] بیان کرد :
که در آن A اطلاعات AP، O اندازه گیری RSSI، و Pt نشان دهنده مختصات RP است.
مقدار متوسط قدرت سیگنال از هر AP در RP محاسبه می شود. این اطلاعات برای ساخت پایگاه داده اثر انگشت استفاده می شود. اثر انگشت i RP را می توان به صورت زیر بیان کرد:
اگر قدرت سیگنال WiFi بلادرنگ دریافت شده توسط دستگاه تلفن همراه کاربر مورد نظر S باشد ، فاصله بین اطلاعات سیگنال بیدرنگ وای فای و پایگاه داده اثر انگشت توسط الگوریتم تطبیق زیر محاسبه میشود:
با استفاده از الگوریتم k-نزدیکترین همسایه، از K کوچکترین مقادیر d i برای محاسبه مختصات نقطه هدف استفاده می شود:
که در آن C مجموعه ای است که با K کوچکترین مقادیر d ساخته می شود و L i نشان دهنده مختصات RP است.
2.2. PDR بر اساس اندازه گیری اینرسی
روش PDR از IMU برای ناوبری و موقعیت یابی استفاده می کند. با افزایش پیشنهادات حسگر در گوشی های هوشمند، شتاب سنج را می توان به عنوان گام شمار و مغناطیس سنج ها را می توان به عنوان ارائه دهنده عنوان قطب نما استفاده کرد. بر اساس موقعیت اولیه، اطلاعات موقعیت را می توان با استفاده از گام شمار و هدینگ به دست آورد.
در الگوریتم PDR، تعداد و طول هر مرحله با توجه به مشاهدات شتاب سنج اندازه گیری می شود و عنوان ناوبری با استفاده از مشاهدات ژیروسکوپ و مغناطیس سنج محاسبه می شود. سپس موقعیت فعلی را می توان با استفاده از معادله زیر محاسبه کرد [ 30 ]:
که در آن ( N , E ) مختصات موقعیت عابر پیاده را نشان می دهد، SL طول گام و α عنوان است.
راه رفتن منجر به تغییر در هسته می شود که توسط شتاب سنج نشان داده می شود. از این رو، الگوریتم حالت دسته ای پیاده سازی شده برای تشخیص گام را می توان با استفاده از اطلاعات شتاب سنج پیاده سازی کرد.
ارتباط واضحی بین طول گام و آمار اطلاعات شتابسنج مانند حداکثر مقدار، واریانس و دوره وجود دارد. رابطه بین طول گام و سرعت راه رفتن در [ 30 ، 31 ] مورد تحقیق قرار گرفته است. این مطالعات نشان می دهد که طول گام به طور ناخودآگاه بزرگتر می شود زمانی که سرعت راه رفتن سریعتر در نظر گرفته شده بود [ 31 ]. مدل خطی سه پارامتری زیر [ 30 ] برای محاسبه طول گام از طریق معادله زیر [ 32 ] استفاده میشود:
جایی که p دوره هر مرحله است، س¯m a xس¯حداکثرمقدار پیک شتاب پس از فیلتر صاف است و A ، B و C ضرایب رگرسیونی هستند که با تمرین به دست می آیند.
3. سیستم یکپارچه WiFi/PDR
3.1. مدل پویا
PDR یک الگوریتم مستقل با مشاهده فرکانس بالا است و اطلاعات موقعیت دقیق را در کوتاه مدت ارائه می دهد. بزرگترین مشکل برای PDR خطای تجمعی است. پایگاه داده اثر انگشت فناوری موقعیت یابی WiFi بر اساس نکات شناخته شده ساخته شده است. هیچ رابطه مستقیمی برای نتایج موقعیت در زمان های مختلف وجود ندارد. وضوح موقعیت توسط فناوری WiFi در حال حاضر تحت تأثیر وضوح موقعیت قبلی قرار نخواهد گرفت. بنابراین هیچ خطای تجمعی برای فناوری موقعیت یابی WiFi وجود ندارد. مدت زمان به روز رسانی برای موقعیت یابی WiFi حدود 1 یا 2 ثانیه است. واضح است که یکپارچه سازی فناوری موقعیت یابی WiFi و PDR می تواند عملکرد را در یک سیستم فردی افزایش دهد. فیلتر کالمن در سیستم یکپارچه WiFi/PDR استفاده شده است.33 ] در اینجا استفاده می شود. خطای موقعیت، خطای فاصله و خطای عنوان متغیرهای حالتی هستند که باید تخمین زده شوند. بردار حالت را می توان به صورت [ 33 ] بیان کرد:
علاوه بر این، مدل دینامیک خطای سیستم یک سیستم یکپارچه WiFi/PDR به شرح زیر است:
که در آن N و E به ترتیب مختصات موقعیت سیستم یکپارچه در شمال و شرق هستند، s طول گام محاسبه شده توسط الگوریتم PDR و θ زاویه سمت است. علاوه بر این، w N ، w E ، ws و w θ به ترتیب نویز فرآیند پارامترهای حالت dN ، dE ، ds و dθ هستند . آنها توزیع گاوسی دارند و واریانس آنها با نشان داده می شود δ2ن�ن2، δ2E��2، δ2س�س2و δ2θ��2، به ترتیب.
ماتریس انتقال حالت به صورت زیر مدلسازی میشود:
3.2. مدل مشاهده
مدل مشاهده در سیستم یکپارچه WiFi/PDR از تفاوت موقعیت بین فناوری موقعیت یابی WiFi و الگوریتم PDR تشکیل شده است، به شرح زیر [ 33 ]:
که در آن (Δ N , Δ E ) اختلاف موقعیت است، ( N w , k , E w , k ) نتیجه موقعیت محاسبه شده توسط سیستم موقعیت یابی WiFi است و ( N p , k , E p , k ) موقعیت است. توسط الگوریتم PDR محاسبه می شود.
3.3. الگوریتم فیوژن با فیلتر کالمن
هنگامی که سیگنال های WiFi در دسترس هستند، تخمین فیلتر کالمن برای به روز رسانی پارامترهای وضعیت از طریق به روز رسانی زمانی و یک به روز رسانی مشاهده در سیستم یکپارچه WiFi/PDR استفاده می شود. فرآیند به روز رسانی زمانی به صورت [ 34 ] بیان می شود:
علاوه بر این، معادله به روز رسانی مشاهده فیلتر کالمن به صورت زیر نوشته شده است:
جایی که ایکس¯¯¯کایکس¯کتخمین حالت پیشینی است، ایکس^کایکس^کتخمین حالت پسینی است، G k ماتریس بهره فیلتر کالمن است، پ¯¯¯کپ¯کماتریس کوواریانس پیشینی بردار حالت، Pk ماتریس کوواریانس پسینی بردار حالت، Rk ماتریس کوواریانس بردار نویز مشاهده است، و Qk – 1 ماتریس کوواریانس نویز فرآیند است . زیرنویس k نشاندهنده زمان است، و زیرنویس k ، k -1 نشاندهنده وضعیت یا تخمین کوواریانس به جلو از k -1 به k است .
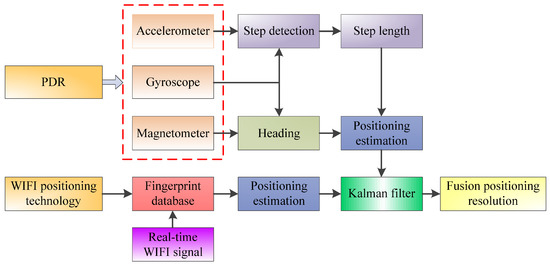
ما یک بلوک دیاگرام را در شکل 1 ارائه می کنیم که مکانیسم های اساسی سیستم یکپارچه WiFi/PDR را برای محلی سازی داخلی نشان می دهد. در فناوری موقعیت یابی PDR، مشاهدات از شتاب سنج و ژیروسکوپ برای تشخیص مراحل و محاسبه طول آنها استفاده می شود. در عین حال، مشاهدات مغناطیس سنج و ژیروسکوپ برای به دست آوردن اطلاعات عنوان استفاده می شود. با اطلاعات طول گام و عنوان، موقعیت را می توان تخمین زد. موقعیتی که توسط فناوری موقعیتیابی WiFi تخمین زده میشود، به فیلتر کالمن وارد میشود تا موقعیت همجوشی با اطلاعات موقعیت بهدستآمده توسط PDR مشخص شود.
4. یک فیلتر تطبیقی و قوی بر اساس سناریو و شناخت حالت حرکت
برای بهبود سازگاری مدل پویا و استحکام مدل مشاهده، از فیلترهای تطبیقی و قوی بر اساس سناریو و تشخیص حالت حرکت استفاده میشود.
4.1. فیلتر تطبیقی بر اساس سناریو و تشخیص حالت حرکت
قابلیت اطمینان موقعیت های محاسبه شده با استفاده از فناوری موقعیت یابی WiFi و PDR ضعیف است. محیط مسیر و حالت حرکت تأثیر زیادی بر وضوح موقعیت یابی دارند. از این رو، دقت مدل حالت به طور قابل توجهی در محیطهای مسیر مختلف و حالتهای حرکت تغییر میکند. برای تنظیم مدل حالت به گونهای که با محیطهای مسیر و حالتهای حرکتی مختلف سازگار شود، یک فیلتر تطبیقی مبتنی بر محیطهای مسیر و تشخیص حالت حرکت پیشنهاد شدهاست. فیلتر تطبیقی نوع مسیر عابر پیاده (مستقیم یا چرخشی) را تعیین می کند [ 33]. در یک سناریوی واقعی، نوع مسیری که یک عابر پیاده طی می کند یکی از عواملی است که بر دقت تأثیر می گذارد. برای بهبود توانایی تشخیص سیستم یکپارچه WiFi/PDR، عوامل اضافی از جمله محیط مسیر (مناطق باز یا راهرو) و سرعت (آهسته، معمولی یا سریع) در نظر گرفته شده است.
-
نوع مسیر عابر پیاده روی دقت پارامتر حالت θ تاثیر می گذارد . واریانس dθ وقتی عابر پیاده می چرخد زیاد است ( δ2θ= 2 درجه × 2 درجه��2=2درجه×2درجه) و وقتی مستقیم حرکت می کند کوچکتر می شود ( δ2θ= 10 درجه × 10 درجه��2=10درجه×10درجه). نوع مسیر عابر پیاده را می توان با مقادیر انباشته شده داده های ژیروسکوپ قضاوت کرد.
-
محیط مسیر بر دقت پارامترهای حالت N و E تأثیر می گذارد . در یک منطقه راهرو، تنها دو جهت حرکت در دسترس است. در یک منطقه باز، عدم قطعیت جهت حرکت بسیار زیاد است. بنابراین دقت پارامترهای حالت N و E در یک راهرو بیشتر از یک منطقه باز است. وقتی عابر پیاده در یک راهرو قرار دارد، δ2ن=δ2E= 2 . 5 متر × 2 . 5 متر �ن2=��2=2.5 متر×2.5 متر; وقتی عابر پیاده در یک منطقه باز قرار دارد، δ2ن=δ2E= 5 متر × 5 متر �ن2=��2=5 متر×5 متر. محیط مسیر را می توان با قدرت سیگنال WiFi تعیین کرد.
-
سرعت بر دقت محاسبه طول گام تأثیر می گذارد. از این رو، یک رابطه قوی بین پارامتر سرعت و حالت s وجود دارد. وقتی عابر پیاده با سرعت آهسته یا سریع حرکت می کند واریانس ds زیاد است (δ2س= 2 متر × 2 متر �س2=2 متر×2 متر) و هنگام حرکت با سرعت معمولی کوچک است ( δ2س= 1 متر × 1 متر �س2=1 متر×1 متر). سرعت را می توان با مقادیر انباشته شده از داده های شتاب سنج تعیین کرد.
4.2. فیلتر کالمن قوی بر اساس فاصله ماهالانوبیس
بر اساس فرض گاوسی، Z k باید گاوسی با میانگین باشد اچکایکس¯¯¯کاچکایکس¯کو کوواریانس پV¯¯¯کپ�¯ک. بنابراین، یک مترم از مجذور فاصله ماهالانوبیس Z k باید توزیع F باشد و m بعد بردار مشاهده Z k است . آزادی توزیع F m و ∞ است [ 28 ، 35 ]:
جایی که M k فاصله Mahalanobis است.
یک آزمون F برای تعیین اینکه آیا اندازه گیری واقعی تحقق Z k تحت فرض گاوسی است یا خیر ساخته می شود. سطح معناداری α آستانه احتمالی است که زیر آن فرضیه صفر رد می شود. در این مطالعه، 1٪ اتخاذ شده است و کمیک α بالایی مربوطه F α ( m , ∞) است :
که در آن Pr[·] احتمال یک رویداد تصادفی را نشان می دهد، به عنوان مثال، احتمال بزرگتر بودن λk از F α ( m ,∞) بسیار کوچک است، مثلا α . بنابراین، اگر λ k واقعی بزرگتر از این چندک – α باشد ، فرضیه صفر رد می شود و می توان نتیجه گرفت که نوعی نقض مفروضات اساسی وجود دارد. در این مورد، Z k به دلیل خطای فاحش مختل شده است.
اگر شاخص λk بزرگتر از Fα ( m ,∞) باشد، یک عامل قوی β برای باد کردن ماتریس کوواریانس بردار نویز اندازهگیری معرفی میشود :
ضریب قوی به صورت زیر محاسبه می شود:
با توجه به روش فوق، زمانی که λk بزرگتر از Fα ( m ,∞) باشد، مشاهده Z k به دلیل خطای فاحش مختل شده است . در عمل، ممکن است λk بزرگتر از F α ( m ,∞) باشد ، حتی زمانی که خطای فاحشی در مشاهده Zk وجود نداشته باشد .
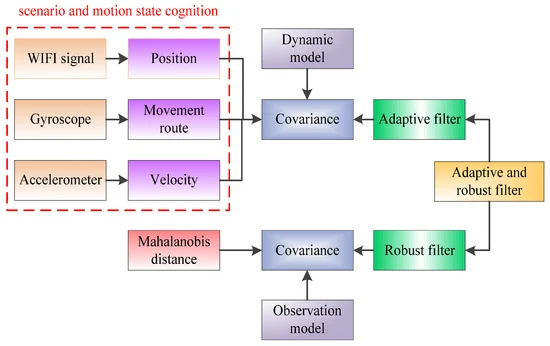
ما به صورت شماتیک یک بلوک دیاگرام را در شکل 2 ارائه می کنیم که مکانیسم اساسی فیلتر تطبیقی و قوی را بر اساس سناریو و تشخیص حالت حرکت نشان می دهد. در مقایسه با [ 35 ]، یک فیلتر تطبیقی مبتنی بر سناریو و تشخیص حالت حرکت با فاکتورهای شاخص بیشتری برای تنظیم کوواریانس مدل دینامیکی پیشنهاد شده است. در همان زمان، فیلتر قوی در [ 28 ] در سیستم یکپارچه WiFi/PDR برای تنظیم کوواریانس مدل مشاهده اعمال میشود.
5. آزمایش و تجزیه و تحلیل
سایت آزمایشی در طبقه چهارم دانشکده علوم محیطی و انفورماتیک فضایی، دانشگاه فناوری معدن چین [ 33 ] راه اندازی شد. یک سیستم شبکه WiFi ایجاد شد و Samsung Galaxy Note 3 (SM-N9002) به عنوان دستگاه تست تلفن همراه انتخاب شد. همانطور که در شکل 3 نشان داده شده استروترهای بی سیم D-LINK (DIR-600NB) در هر 9 متر در امتداد دو طرف راهرو نصب شدند و در مجموع 64 AP را ارائه کردند. در طول آزمایش، سیستم موقعیت یابی اطلاعات موقعیت را با توجه به قدرت سیگنال WiFi هر 2 ثانیه برای کاربران موبایل ارسال می کرد. فرکانس نمونه برداری از داده های سیستم ناوبری اینرسی 50 هرتز تعیین شد. در آزمایش، عابر پیاده از انتهای غربی منطقه C در دانشکده محیط زیست و انفورماتیک فضایی شروع شد و از طریق منطقه A در امتداد راهرو با سرعت ثابت به سمت غربی ترین انتهای منطقه B حرکت کرد. در طی این فرآیند، عابر پیاده اساساً تلفن همراه را در سطح نگه داشت و در مجموع 316 پله را طی کرد. مسیر مرجع با مسیر محاسبه شده توسط فناوری موقعیت یابی WiFi در مقایسه می شود شکل 4 مقایسه شده است. نتایج نشان می دهد که خطاهای فاحش زیادی در وضوح موقعیت یابی از فناوری WiFi، به خصوص در گوشه ها وجود دارد. چهار خطای فاحش واضح است و با دایره های قرمز مشخص شده است. وضوح موقعیت یابی WiFi تأیید می کند که سناریوی داخلی احتمالاً سیگنال WiFi را به طور جدی مختل می کند.
برای آزمایش کارایی فیلترهای تطبیقی و مقاوم بر اساس سناریو و تشخیص حالت حرکت، سه طرح محاسبه انجام شد:
-
طرح 1: فقط فیلتر استاندارد.
-
طرح 2: فیلتر تطبیقی بر اساس سناریو و تشخیص حالت حرکت.
-
طرح 3: فیلتر تطبیقی و قوی (روش پیشنهاد شده در بخش 4 ).
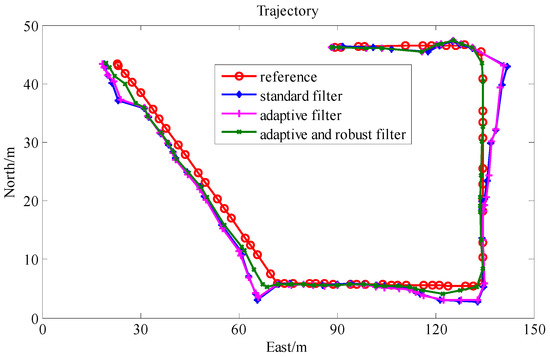
شکل 5 مسیر مرجع و سه طرح را نشان می دهد. به دلیل تأثیر خطای فاحش در موقعیت یابی WiFi، خطاهای موقعیت برای فیلتر استاندارد و فیلتر تطبیقی زیاد است. طرح 3 به عملکرد دقیق و قوی دست می یابد. خطای موقعیت طرح 1 کمی بزرگتر از دقت موقعیت طرح 2 است که نشان می دهد فیلتر تطبیقی پایدارتر است. شکل 6مسیرهای آزمایش میدانی را برای طرح های مختلف در یک پلان طبقه داخلی مقایسه می کند. نتایج نشان میدهد که طرحهای 1 و 2 دقت پایینی دارند. وقتی موقعیتیابی WiFi دارای خطاهای فاحشی است، موقعیتهای طرحهای 1 و 2 به طور جدی از مرجع منحرف میشوند. در مقابل، طرح 3 این خطاها را کاهش می دهد و نتیجه ناوبری را بهبود می بخشد. مسیر طرح 2 در طول کل آزمایش در یک منطقه راهرو قرار داشت.
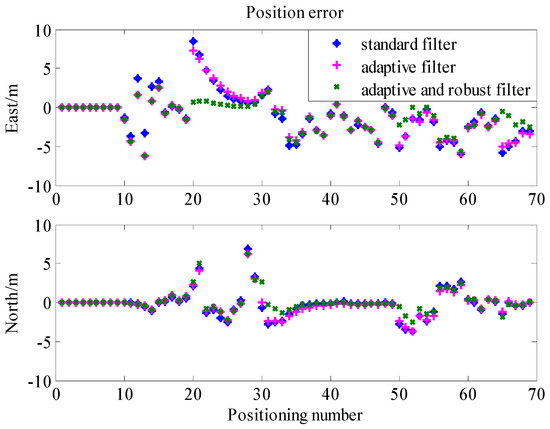
خطاهای موقعیت با توجه به موقعیت مرجع برای ارزیابی عملکرد محاسبه شد. شکل 7 سری زمانی خطاهای موقعیت را در جهت های شرقی و شمالی برای طرح های مختلف نشان می دهد. موقعیت سه طرح در جهت صفحه در شکل 8 مقایسه شده است . ریشه میانگین مربع (RMS) خطای موقعیت برای هر طرح در ارائه شده است جدول 1 ارائه شده است. خطای موقعیت طرح 1 بزرگتر از خطای موقعیت طرح 2 است که نشان می دهد فیلتر تطبیقی پیشنهادی قادر به تعیین سناریو و حالت حرکت و تنظیم کوواریانس نویز فرآیند است. فیلتر تطبیقی و قوی قادر است اثرات خطای فاحش را کاهش دهد. نتایج نشان می دهد که موقعیت طرح 3 می تواند به ترتیب به سطوح دقت 2.197 متر، 1.406 متر و 2.608 متر برای اجزای مختصات شرقی، شمالی و صفحه دست یابد. در مقایسه با طرح 1، طرح پیشنهادی 3 دقت موقعیت را در جهت های شرق، شمال و صفحه به ترتیب 27%، 14% و 24% بهبود می بخشد، که به وضوح نشان می دهد که فیلتر کالمن تطبیقی و قوی بسیار موثر است و همه خطاهای فاحش ناشی از موقعیت یابی WiFi با موفقیت شناسایی شدند.
جدول 2خطای RMS موقعیت عمودی را برای راه حل های طرح های مختلف و موقعیت مرجع برای نقاط 1، 2، 3 و 4، جایی که خطاهای فاحش رخ می دهد، مقایسه می کند. در مقایسه با طرح 1، فیلتر تطبیقی و قوی دقت موقعیت هواپیما را در نقاط 1، 2، 3 و 4 به ترتیب 68، 44، 61 و 68 درصد بهبود می بخشد. نتایج نشان میدهد که طرح 1 میتواند به ترتیب به دقت موقعیت صفحه 8.712 متر، 3.561 متر، 5.856 متر و 5.977 متر برای نقاط 1، 2، 3 و 4 دست یابد. در مقابل، خطاهای موقعیت مربوطه که هنگام اعمال فیلتر تطبیقی و مقاوم رخ می دهد به ترتیب 2.756 متر، 1.983 متر، 2.295 متر و 1.932 متر است. در مقایسه با طرح 2، طرح 3 خطاهای موقعیت هواپیما را در نقاط 1، 2، 3 و 4 به ترتیب 56، 33، 53 و 54 درصد کاهش می دهد.
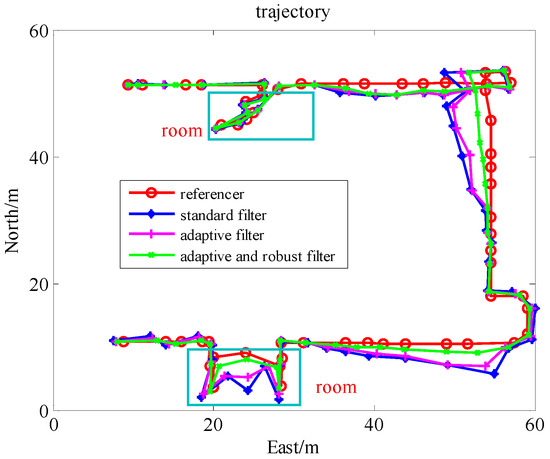
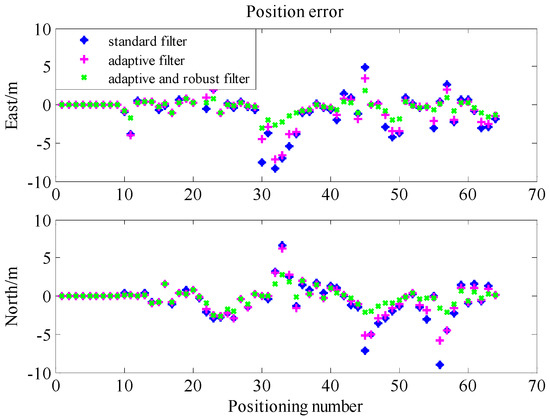
به منظور ایجاد قضاوت بهتر در مورد روشهای پیشنهادی، آزمایش دیگر روی سناریویی که داخل اتاقها میرود آزمایش شد. سایت آزمایشی مشابه محل آزمایش فوق بود. شکل 9 مسیر مرجع و سه طرح را نشان می دهد. به روشی مشابه نتایج تجربی فوق، بدیهی است که مسیرهای طرح 1 و طرح 2 به طور جدی از مرجع منحرف شده اند. شکل 10 سری زمانی خطاهای موقعیت را در جهت های شرقی و شمالی برای طرح های مختلف در سناریویی که داخل اتاق ها می رود نشان می دهد. ریشه میانگین مربع (RMS) خطای موقعیت برای هر طرح در ارائه شده است جدول 3 ارائه شده است. نتایج نشان میدهد که موقعیت طرح 3 میتواند به سطوح دقت 1.002 متر، 1.069 متر و 1.465 متر برای اجزای مختصات شرقی، شمالی و صفحه دست یابد. در مقایسه با طرح 1، طرح پیشنهادی 3 دقت موقعیت را در جهت های شرق، شمال و صفحه به ترتیب 59، 54 و 57 درصد بهبود می بخشد. این به وضوح نشان میدهد که فیلتر تطبیقی و قوی میتواند دقت سیستم یکپارچه WiFi/PDR را در سناریویی که داخل اتاق میرود، بهبود بخشد.
6. نتیجه گیری
این مقاله یک سیستم یکپارچه WiFi/PDR بهبود یافته را با استفاده از فیلترهای تطبیقی و قوی برای به دست آوردن اطلاعات موقعیت دقیق تر برای مکان یابی داخلی ارائه می دهد. به طور خاص، یک فیلتر کالمن تطبیقی بر اساس سناریو و تشخیص حالت حرکت و همچنین یک فیلتر کالمن قوی بر اساس فاصله Mahalanobis ساخته شد. فیلترهای تطبیقی و قوی برای بهبود دقت موقعیت سیستم های یکپارچه WiFi/PDR پیاده سازی شدند. اندازه گیری های واقعی برای نشان دادن عملکرد رویکرد پیشنهادی استفاده شد.
در آزمایشات میدانی، مقایسه خطای فیلتر کالمن استاندارد، فیلتر کالمن تطبیقی و فیلتر کالمن تطبیقی و مقاوم، فیلتر کالمن تطبیقی بر اساس سناریو و تشخیص حالت حرکت نشان داد که عملکرد کمی بهتر برای WiFi/ سیستم های یکپارچه PDR نسبت به فیلتر استاندارد کالمن. فیلتر قوی کالمن در شناسایی خطای اطلاعات موقعیت بزرگ ناشی از فناوری موقعیت یابی WiFi بسیار موثر است و همچنین استحکام خوبی را نشان می دهد.








بدون نظر