

خلاصه
برخلاف تجسمهای واقعی، کاربردهای منظر شهری و سیستم اطلاعات ساختمان (BIM)، ارائههای حجمی سهبعدی محاسبات و کاربردهای خاص عناصر ساختمانی سهبعدی را برای برنامهریزی شهری سهبعدی و کاداسترهای سهبعدی برجسته میکنند. دانستن مقادیر دقیق حجمی و مکانهای مرزی سه بعدی فضاهای ساختمانی سه بعدی یک شاخص حیاتی است که باید در طول پردازش دادهها ثابت بماند زیرا مقادیر مربوط به اشغال فضا، تصدی، مالیات و ارزشگذاری است. برای برآوردن این الزامات، این مقاله یک الگوریتم پنج مرحلهای را برای انجام یک تغییر فضای ساختمان سه بعدی ارائه میکند. این الگوریتم برای تبدیل چندین عنصر ساختمان به یک شی ساختمانی حجمی سه بعدی و در عین حال حفظ حجم دقیق فضای سه بعدی و بدون تغییر مکان های سه بعدی یا جابجایی مرزهای ساختمان استفاده می شود. به عنوان نمونه، این مطالعه از دادههای ورودی و عناصر ساختمان بر اساس مدلهای LoD3 زبان نشانهگذاری جغرافیای شهر (CityGML) استفاده کرد. این مقاله روشی را برای فضای شهری سه بعدی و مدیریت دارایی سه بعدی با هدف ساخت یک شی حجمی سه بعدی برای یک ساختمان انتگرال با استفاده از اشیاء CityGML، با ادغام هندسه عناصر مختلف ساختمان ارائه میکند. اشیاء به دست آمده دارای هندسه سه بعدی واقعی هستند که می تواند با هندسه جامد نشان داده شود و برای استفاده موثر در برنامه ریزی شهری سه بعدی و کاداسترهای سه بعدی در یک فایل CityGML ذخیره شود. این مطالعه از دادههای ورودی و عناصر ساختمان بر اساس مدلهای LoD3 زبان نشانهگذاری جغرافیای شهر (CityGML) استفاده کرد. این مقاله روشی را برای فضای شهری سه بعدی و مدیریت دارایی سه بعدی با هدف ساخت یک شی حجمی سه بعدی برای یک ساختمان انتگرال با استفاده از اشیاء CityGML، با ادغام هندسه عناصر مختلف ساختمان ارائه میکند. اشیاء به دست آمده دارای هندسه سه بعدی واقعی هستند که می تواند با هندسه جامد نشان داده شود و برای استفاده موثر در برنامه ریزی شهری سه بعدی و کاداسترهای سه بعدی در یک فایل CityGML ذخیره شود. این مطالعه از دادههای ورودی و عناصر ساختمان بر اساس مدلهای LoD3 زبان نشانهگذاری جغرافیای شهر (CityGML) استفاده کرد. این مقاله روشی را برای فضای شهری سه بعدی و مدیریت دارایی سه بعدی با هدف ساخت یک شی حجمی سه بعدی برای یک ساختمان انتگرال با استفاده از اشیاء CityGML، با ادغام هندسه عناصر مختلف ساختمان ارائه میکند. اشیاء به دست آمده دارای هندسه سه بعدی واقعی هستند که می تواند با هندسه جامد نشان داده شود و برای استفاده موثر در برنامه ریزی شهری سه بعدی و کاداسترهای سه بعدی در یک فایل CityGML ذخیره شود.
کلید واژه ها:
توپولوژی ; کاداستر سه بعدی ; شی حجمی سه بعدی ; CityGML ; ساختمان
1. مقدمه و انگیزه ها
مدلهای سهبعدی (سهبعدی) شهر را میتوان با استفاده از تکنیکهای متعدد ایجاد کرد و به طور گسترده در زمینههای متعددی مانند برنامهریزی شهری، طراحی معماری و ارتباطات بیسیم استفاده شده است [1 ] . نماهای منطقی مختلفی از ساختمان ها وجود دارد. سازه های معماری بر عناصر ساختمانی مانند سقف، دیوارها یا درها تمرکز می کنند، در حالی که طراحی معماری بر اشکال و چیدمان عناصر ساختمان متمرکز است. در مقایسه با تجسمهای واقعی فوتورئالیستی، ارائههای هندسه سه بعدی قابل محاسبه بر ویژگیهای خاص اجسام تأکید میکنند و از هندسه برای پشتیبانی از محاسبات و تحلیلها استفاده میکنند. برای ساختمانها، چنین ویژگیهایی شامل فضای سهبعدی، کمیت حجمی ساختمان و مکانهای مرزهای سهبعدی ساختمان است. در زمینه های برنامه ریزی و مدیریت شهری سه بعدی، کاداسترهای سه بعدی [2 ، 3 ، 4 ، 5 ] به کل فضای حجمی بسته سه بعدی یک ساختمان نیاز دارد تا فضای دقیق را بر اساس نقاط مرزی، خطوط و چهره ها با تمرکز ویژه بر مرزهای بیرونی ساختمان ها شناسایی کند. این حجم یک شاخص مهم است که برای تعیین فضای اشغال شده توسط یک ملک برای کمک به مدیریت فضای سه بعدی و ارزیابی مالیات بر دارایی استفاده می شود. در یک کاداستر سه بعدی، یک بسته سه بعدی به عنوان واحد فضایی تعریف می شود که در برابر آن حقوق منحصر به فرد و همگن با کل موجودیت مرتبط است [ 2] .]؛ با این حال، جنبه های قانونی کاداسترهای سه بعدی خارج از محدوده این مقاله است. هدف کاداسترهای سه بعدی مدیریت فضای سه بعدی بسته های سه بعدی با استفاده از هندسه سه بعدی برای نمایش واحد دارایی سه بعدی است. مهمتر از آن، این حجم از فضای سه بعدی اجازه ندارد در طول پردازش داده ها تغییر کند زیرا به اشغال فضای بسته، تصدی، مالیات و ارزش گذاری مربوط می شود. خطاهای هندسی کوچک در مدل های ساختمان ممکن است منجر به خطاهای بزرگ در حجم های محاسبه شده شود [ 6 ]. بنابراین، در طول ساخت حجمی سه بعدی از داده های سه بعدی به هندسه سه بعدی، مرزهای ساختمان ها را نمی توان تغییر داد.
با توجه به معیارهای منطقی درگیر در کاداسترهای سه بعدی و سایر کاربردها، این مقاله قصد دارد یک ساختمان را به عنوان یک شی واحد با وجوه بسته و یک حجم قابل محاسبه برای برآوردن الزامات کاداسترهای سه بعدی و سایر کاربردها در این مقاله نشان دهد. BIM ها (مدل های اطلاعات ساختمان) توجه گسترده ای را به خود جلب کرده اند. در نتیجه، مقدار زیادی از داده های BIM (IFC و زبان نشانه گذاری جغرافیای شهر (CityGML) LoD3) تولید شده است. BIMها دادههای دقیقی را ارائه میدهند که عناصر ساختمان را با استفاده از مختصات و هندسی توصیف میکنند، و اینها میتوانند برای استخراج مرزهای سه بعدی برای کاداستر استفاده شوند. عناصر ساختمانی نشان داده شده در CityGML LoD3 به عنوان داده های ورودی برای محاسبه فضای ساختمان سه بعدی استفاده می شوند. این فرآیند در خدمت انتقال ساختار هندسی است که توانایی تجزیه و تحلیل و محاسبه اشیاء سه بعدی را بهبود می بخشد. ما یک الگوریتم پنج مرحله ای را برای ساخت حجمی سه بعدی و ساده سازی یک شی CityGML ارائه می کنیم و سپس از آن برای تبدیل چندین شی CityGML LoD3 به یک فضای ساختمانی حجمی سه بعدی استفاده می کنیم. نتیجه سادهترین هندسه سهبعدی است – یک جامد حجمی سهبعدی که بهترین تناسب با شکل اصلی جسم دارد و حجم دقیق فضای ساختمان سهبعدی اصلی را حفظ میکند.
2. کارهای مرتبط
برای اهداف برنامه های مختلف، کاربران هنگام ساختن مدل هایی برای برنامه های کاربردی دنیای واقعی اهداف مختلفی دارند. در نتیجه، آنها همچنین دارای الزامات متناظر برای نمایش های هندسی و روش های ساده سازی مناسب هستند. مصرف انرژی شهری برای گرمایش با حجم پوششی ساختمان ها رابطه مستقیم دارد [ 7 ]. برای برآورد دقیق مصرف انرژی، کروگر و کولبه [ 8] شاخصهای کلیدی را برای تجزیه و تحلیل نیازهای انرژی حرارتی ساختمان از مدلهای سه بعدی برلین به دست آورد و آنها را با مدلهای ساختمان CityGML ادغام کرد تا CityGML Energy ADE (افزونههای دامنه کاربردی) را تحقق بخشد. چنین کاربردهایی یک موضوع مشترک دارند: فرض می شود ساختمان ها اجسام حجمی بسته سه بعدی هستند که می توان حجمی را برای آنها محاسبه کرد. برای برآوردن الزامات کاربردهای واقعی اشیاء حجمی سه بعدی، محققان الگوریتم های ساده سازی ساختمان را بر اساس داده های شهر سه بعدی پیشنهاد کرده اند. بسیاری از مطالعات بر ایجاد مدل های سه بعدی شهر (به عنوان مثال، [ 9 ]) و تبدیل عناصر ساختمان در سطوح مختلف جزئیات (LoDs) متمرکز شده اند (به عنوان مثال، [ 10 ، 11 ، 12]]). مطالعات دیگر روش هایی را برای ساده سازی و تعمیم مدل های ساختمان در یک محیط سه بعدی ایجاد کرده اند. این مطالعات بر روی کارهایی مانند ساخت اشکال سه بعدی با اکستروژن ردپای زمین ساختمان های سه بعدی [ 3 ، 13 ] یا ساده کردن روش های دو بعدی مانند حذف یا اصلاح لبه ها تمرکز کرده اند [ 12 ، 14 ، 15 ، 16 ]. با این حال، این روش ها کاربرد محدودی در ساختمان های سه بعدی با نمای عمودی (دیوار) واحد دارند و برای بسیاری از اشکال واقعی ساختمان مناسب نیستند. جنبه دیگر ساده سازی و تعمیم شکل سه بعدی ساختمان ها است [ 15 ، 17 ، 18 ، 19 ، 20 ،21 ]، از LoD های مختلف در کاربردهای تجسم استفاده می کند. با این حال، این روش ها مرزها و مکان های مختصات سه بعدی را تغییر می دهند که برای کاداسترهای سه بعدی مجاز نیست. Steuer از voxelization ساختمان برای تقریب حجم ساختمان استفاده کرد – رویکردی که بسیار متفاوت از روش نمایش مرزی است [ 22 ].
Thiemann [ 23 ] و Thiemann و Sester [ 24 ] مفهومی را بر اساس تقسیم بندی مجتمع سلولی و درخت هندسه جامد سازنده (CSG) پیشنهاد کردند که ساختمان ها را برای ساده سازی با حذف عناصر با حجم کمتر به سه بعدی اولیه تقسیم می کرد. Thiemann و Sester [ 25 ] با استفاده از تنظیم حداقل مربعات، الگوهای سه بعدی تطبیقی مناسب برای ساختمان های خاص مبتنی بر ردپای یا نمای ساده ارائه کردند. Kada [ 18 ] روش مشابهی را برای تقسیم یک مدل ساختمان به سلول ها و سپس تعمیم آنها با استفاده از تجزیه سلولی ارائه کرد. فوربرگ [ 26 ، 27] مورفولوژی و اپراتورهای فضای انحنا را با استفاده از روش فضای مقیاس برگرفته از روشهای پردازش تصویر برای سادهسازی ساختمانها با مدلهای ساختمانهای سه بعدی تطبیق داد. از طریق عملیات روشن و خاموش، می توان ویژگی های کوچک را حذف کرد و سوراخ های کوچک را پر کرد. یک روش مورفولوژی ریاضی مشابه توسط مایر [ 20 ] استفاده شد . با این حال، این روش ها بر اساس اشکال اکسترود شده و سازه های عمود بر ساختمان ها هستند.
مائو و همکاران [ 15 ] یک ساختار CityTree برای ساختمانهای گروهبندی شده پیشنهاد کرد تا تجمع پویا را برآورده کند که الزامات تجسم برای ساختمانهای خوشهای را برآورده میکند. با این حال، این سادهسازیهای خوشهای مدلهای ساختمان بر اساس نقشههای زمینی ساختمانها است و فقط با CityGML LoD1 مؤثر است. این الگوریتمهای سادهسازی اطلاعات معنایی ساختمان را نادیده میگیرند و بر اثر تجسم ساختمانها تمرکز میکنند. با استفاده از روش ریخته گری پرتو، فن و منگ [ 12] پوسته بیرونی ساختمان را به دست آورد و دیوارها و سقف های ساختمان را با استفاده از اطلاعات معنایی از CityGML ساده کرد. ساده سازی پس از طرح ریزی دیوارها بر روی یک صفحه دو بعدی انجام شد و نتایج پس از بازسازی ساختمان به دست آمد. با این حال، به دست آوردن یک پوسته بیرونی با روش ریختهگری پرتو برای ساختمانهای معمولی قابل اجرا نیست و نتایج یک حجم هندسی سهبعدی قابل محاسبه را ارائه نمیکنند. بیگ و رحمان [ 16]، با استفاده از حداقل مقادیر یال ها نشان داده شده در LoD های مختلف، مقادیر آستانه را برای حذف لبه ها تنظیم کرد و سپس ساده سازی را برای استخراج یک مدل LoD1 بر اساس مدل های LoD3 و LoD4 انجام داد. این روش با استفاده از ردپای افقی پوسته بیرونی ساختمان که بر روی زمین پیش بینی شده است، به تعمیم می رسد. با این حال، این روش همچنین مرزهای بیرونی ساختمان ها را تغییر می دهد. بنابراین، الزامات کاداستر سه بعدی و مدیریت دارایی سه بعدی را برآورده نمی کند.
اکثر روشها برای سادهسازی مدلهای ساختمان بیشتر بر نمایش بصری سطحی ساختمانها تمرکز دارند و برای ایجاد مدلهای سهبعدی ساختمانها طراحی شدهاند تا ساختوساز حجمی سهبعدی دقیق. علاوه بر این، این روشها معیارها و اندازههای شکلهای سهبعدی بیرونی را تغییر میدهند و حجمهای کوچک یا بخشهایی از ساختمانها را در طول سادهسازی حذف میکنند، که در محاسبه حجم سهبعدی برای اهدافی مانند کاداسترهای سهبعدی مجاز نیست [2 ، 28 ] . در این مقاله، ما تولید و سادهسازی مدلهای ساختمانی سه بعدی واقعی را با استفاده از دادههای CityGML LoD3 توصیف میکنیم و اطلاعات معنایی ساختمانها را در طول ساخت اشیاء حجمی سهبعدی در نظر میگیریم.
3. مدل های ساختمان در CityGML
زبان نشانه گذاری جغرافیای شهر (CityGML)، که توسط کنسرسیوم فضایی باز (OGC) توسعه یافته است، استاندارد کنونی برای مدل سازی سه بعدی (سه بعدی) شهر است. CityGML برای کاربردهای مختلف تجسم یا تجزیه و تحلیل استفاده و به اشتراک گذاشته شده است، زیرا مدل شهر را می توان به طور انعطاف پذیر با اطلاعات هندسی و معنایی مبادله کرد [ 29 ، 30 ، 31 ]. اشیاء CityGML (به عنوان مثال، دیوار ، سقف ، در ، پنجره ) به صورت هندسی با روش B-Rep [ 29 ، 30 ، 31 ] با استفاده از MultiSurface نشان داده می شوند.، که مجموعه ای از چهره ها در فضای سه بعدی است که بدون توجه به اینکه هندسه سه بعدی واقعی داشته باشد یا خیر، شبیه یک شی سه بعدی است [ 2 ، 22 ، 28 ]. علاوه بر این، CityGML از یک بدنه سه بعدی سفت و سخت به نام Solid استفاده می کند که توسط چهره های بسته محدود شده است. با این حال، مدلهای سهبعدی به ندرت با استفاده از Solid به دلیل دشواری ایجاد جامدات نشان داده میشوند، و تنها چند روش برای تبدیل مجموعهای از چهرههای سه بعدی به یک شی حجمی سه بعدی ارائه شده است [2 ] . CityGML دارای پنج LoD است که اهداف متفاوتی را برآورده می کنند. در مقایسه با CityGML با LoD2، LoD3 اشکال دقیق ساختمانهای سه بعدی را توصیف میکند، از جمله بازشوها ( در ، پنجره ، ونصب و راه اندازی ساختمان ) و سطوح مرزی (یعنی سطح سقف ، سطح دیوار ، سطح سقف / سطح بیرونی سقف ، سطح کف / سطح بیرونی ، سطح زمین و سطح بسته ). از این منظر، ساختمانها در LoD3 اشیاء یکپارچه نیستند. در عوض، آنها توسط بسیاری از عناصر یا اجزای ساختمانی منفرد توصیف می شوند، که هر یک به عنوان یک ویژگی چند سطحی با ضخامت معین یا یک مکعب [ 32 ] نشان داده می شود ( شکل 1) .). مدل CityGML LoD3 مدل منبع استفاده شده در این مقاله است. با این حال، فضای حجمی سه بعدی ساختمان را نمی توان مستقیماً از مجموع این عناصر ساختمانی استخراج کرد.
از دیدگاه کاداستر سه بعدی، ساختمان، واحدهای ساختمانی (آپارتمان ها) و سازه های سه بعدی را می توان به عنوان بسته های سه بعدی در نظر گرفت [ 2 ، 28 ]. این مقاله فرض می کند که ساختمان های فیزیکی دارای مرزهای ثابت در فضای قانونی در یک کاداستر سه بعدی هستند. بنابراین، برای به دست آوردن مدلهای حجمی سهبعدی دقیق، این مقاله از CityGML LoD3 به عنوان منبع داده استفاده میکند و روشی را برای ساخت هندسه سهبعدی از چندین شیء CityGML LoD3 برای تبدیل آنها به یک فضای سهبعدی پوششدار پیشنهاد میکند. این رویکرد اشیاء معنایی مختلف ساختمانها را در CityGML LoD3 تحت وضعیتهای ساختمان یکپارچه برای حفظ شکلهای مرزی تا حد امکان مورد بررسی قرار میدهد.
4. ساخت حجمی سه بعدی از CityGML LoD3 و ساده سازی آن
برای کاداسترهای سه بعدی، به فضای سه بعدی که ساختمان در آن قرار دارد توجه شده است. برخلاف تقریب حجم ساختمانهای سه بعدی با استفاده از وکسل [ 22 ]، ما یک الگوریتم پنج مرحلهای را پیشنهاد میکنیم که چندین عنصر ساختمان را به فضای حجمی سهبعدی برای ساخت ساختمان حجمی سهبعدی همراه با سادهسازی هندسی مدلهای ساختمانی سهبعدی تغییر میدهد. در ترکیب با ویژگی های مدل ساختمان CityGML LoD3، فرآیندهای پنج مرحله ای به شرح زیر انجام می شود ( شکل 2).): (1) فیلتر کردن و استخراج عناصر ساختمانی معنایی از CityGML LoD3، (2) استخراج پوسته بیرونی تمام وجوه سه بعدی عناصر مرزی در مدل های CityGML LoD3، از جمله دیوارها و سقف ها، (3) ترمیم وجه های هندسی درها و پنجرههایی که به دیوار و سطح زمین متصل میشوند و (4) وجههای دیوارها را گسترش میدهند تا آنها را با عناصر سقف به هم متصل کرده و آنها را بچسبانند تا هندسه حجمی سهبعدی را برای نمایش یک فضای ساختمانی سهبعدی بسازند [4 ]]. در این مراحل، بسیاری از فرآیندهای هندسی مانند تقاطع و حذف چهره های آویزان برای اصلاح چهره هایی که فضای ساختمان سه بعدی را در بر می گیرد، استفاده می شود. هندسی اشیاء سه بعدی در مرحله (5) فشرده و ساده شده است، و وجهه های سه بعدی همسطح بین دیوارها، درها و پنجره ها با هم ادغام شده و با هم ترکیب می شوند تا حجم داده های هندسه سه بعدی کاهش یابد. این مرحله فرآیندهای هندسی را برای تمام چهرههای سهبعدی یکپارچه، بدون در نظر گرفتن معنایی آنها (به عنوان مثال، دیوار، در یا سقف) انجام میدهد تا به یک سادهسازی سهبعدی خالص از اشکالی دست یابد که بهترین تناسب را با اشکال اصلی در حالی که از هندسهای متفاوت استفاده میکنند.
4.1. فیلتر و استخراج عناصر ساختمان سه بعدی از داده های CityGML
با استفاده از اطلاعات معنایی در دادههای CityGML، گام اول روش پیشنهادی عناصر ساختمانی سهبعدی را استخراج میکند و معنای آنها را در فرآیند ساخت حجمی سهبعدی حفظ میکند و در عین حال از معایب فشردهسازی هندسی خالص چهرههای اضافی اجتناب میکند.
اطلاعات معنایی و هندسی CityGML سازگار است. بنابراین، اطلاعات معنایی را می توان برای فیلتر کردن مدل های سه بعدی تجزیه و تحلیل کرد، که ساده سازی بعدی را تسهیل می کند. درها و پنجرهها در CityGML LoD3 ویژگیها و توصیفات هندسی خاص خود را دارند و اشیایی مانند دیوارها و سقفها حاوی اطلاعاتی در مورد ضخامت آنها هستند. همانطور که در شکل 1 نشان داده شده است، اکثر این اجسام حداقل توسط شش وجه تشکیل شده اند . به طور کلی هر ساختمان دارای پنجره ها، درها، دیوارها و غیره است. واضح است که دیوارها دارای در و پنجره هستند و یک ساختمان هندسه ثابتی دارد. بر اساس این مفاهیم، اطلاعات معنایی مدلهای سهبعدی برای انتخاب اشیایی که میتوانند به عنوان کاندیدای ساخت حجمی باشند، تجزیه و تحلیل میشوند. جزئیاتی مانند BuildingInstallationو دهانه ها ( در یا پنجره ) را می توان فیلتر کرد، در حالی که اشیایی مانند WallSurface ، RoofSurface و GroundSurface برای ساده سازی پردازش آینده حفظ می شوند.
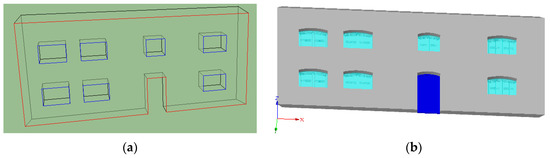
از آنجایی که یک فایل CityGML حاوی عناصر واضح (یعنی فضای داخلی و بازشوها) است که می تواند برای نشان دادن درها و پنجره ها در مدل دیوار استفاده شود و از آنجا که مرزهای درها و پنجره ها با هندسی مدل دیوار مطابقت دارد، اطلاعات معنایی و هندسی تنها با استفاده از مدل دیوار می توان دیوارها، درها و پنجره ها را ردیابی کرد. به عبارت دیگر، هممکانی بین دیوار داخلی/باز و درب/پنجره میتواند برای سادهسازی دادهها با حذف پنجرهها و درها استفاده شود. به عنوان مثال، همانطور که در شکل 3 الف نشان داده شده است، پس از فیلتر کردن معنایی در و پنجره، دیوارهای ساختمان ها مطابق شکل 3 ب تجسم می شوند. در شکل 3الف، درها و پنجرهها سوراخهایی در دیوار هستند و در طول فرآیند قبل از تعمیر با عناصر خاصی مشخص میشوند که در بخش 4.3 توضیح داده شده است .
4.2. استخراج پوسته بیرونی ساختمان سه بعدی
برای ساخت یک فضای ساختمان سه بعدی، این مقاله با هدف استخراج پوسته بیرونی یک ساختمان منفرد برای نشان دادن مرز سه بعدی آن در حالی که مکان ها و اشکال دقیق بدون جابجایی مختصات را حفظ می کند، است. اکثر روشهای سادهسازی مبتنی بر ردپای ساختمان هستند و ردپای مورد استفاده برای ایجاد مدلهای سهبعدی را بیرون میکشند. با این حال، این روش ها مرزهای ساختمان را تغییر می دهند. برای استخراج پوسته بیرونی ساختمان، رایج ترین رویکردها از ریخته گری پرتو استفاده می شود. با این حال، آرایش دیوار ساختمان ها منظم نیست، و صفحه متقاطع پرتو و دیوار ممکن است یک وجه بیرونی نباشد. همانطور که در شکل 4 الف نشان داده شده است، یک پرتو از مرکز ردپای ساختمان به دیوارها ریخته می شود (خط در شکل 4آ). این پرتو ممکن است از چندین دیوار عبور کند. در نتیجه، تعیین اینکه کدام خط (دیوار) دیوار بیرونی است دشوار است. علاوه بر این، در بسیاری از ساختمان های بزرگ، دیوارها به دلیل عدم یکنواختی دیوارها در جهت عمودی، بیش از یک وجه خارجی دارند، همانطور که در شکل 4 ب نشان داده شده است. دیوارهای مجاور پایین بیشتر از دیوارهای بالایی بیرون می زنند و در این محیط دیوارهای عمودی متعدد دیوارهای افقی را به هم متصل می کنند. تحت این شرایط، یک روش معمولی ریخته گری اشعه نمی تواند به استخراج دقیق مرزهای سه بعدی مدل های ساختمانی سه بعدی دست یابد. در این مقاله ابتدا یک چهره بیرونی را شناسایی کرده و از آن برای اتصال چهره های دیگر برای رسیدن به هدف استفاده می کنیم.
یک ساختمان از دیوارها و سقف ها تشکیل شده است. از این رو، استخراج پوسته خارجی ساختمان با تقسیم یک ساختمان به دو قسمت دیوار و سقف انجام می شود.
بر اساس عدم یکنواختی دیوارها در جهت عمودی، دیوارهای ساختمان را می توان به دو نوع تک وجهی عمودی و دیوارهای عمودی متعدد تقسیم کرد. از آنجا که هیچ توصیف یا تعاریف روشنی در CityGML برای روابط فضایی بین دیوارها یا چهرههای خارجی در فضای سه بعدی وجود ندارد، تعریف روابط متقابل بین دیوارها یا چهرههای خارجی برای شناسایی دیوارها یا چهرههای خارجی مهم میشود. فن و همکاران [ 32] روشی را برای استخراج پوسته بیرونی با تبدیل دیوارهای CityGML به ابرهای نقطه ای برای به دست آوردن مرکز ساختمان و بررسی هر وجه از دیوارها و پنجره ها با ریخته گری پرتو ارائه کرد. برخلاف استخراج دیواره بیرونی فن از طریق ابرهای نقطهای، این مقاله ابتدا از رد پا برای شناسایی نقطه مرکزی و پرتاب پرتوی بر روی دیوار برای پیدا کردن یک وجه بیرونی تصادفی دیوار استفاده میکند. سپس از این دیوار به عنوان وجه آغازین برای جستجوی دیگر چهره های بیرونی، حفظ شکل آنها و اتصال آنها استفاده می شود. این مقاله از روش های مختلف پردازش بر اساس ویژگی های دو نوع مدل دیوار استفاده می کند.
در CityGML، دیوارها به طور جداگانه سازماندهی می شوند. هر مدل دیوار (یعنی WallSurface) توسط چند چهره تشکیل شده است. مجاورت دیوارها را می توان بر اساس این که آیا یک صورت مشترک دارند (خواه از xlink در CityGML استفاده می شود) یا دارای هندسی یکسان چند مختصات بین دیوارها تعیین شود. سپس می توان از رابطه همسایه توپولوژیکی برای بررسی ارتباط بین مدل های مختلف دیوار استفاده کرد. این مقاله از یک روش جستجوی عمقی برای استخراج نمای بیرونی تمام دیوارها به شرح زیر استفاده می کند:
(1) یک پرتو از نقطه مرکزی برای تلاقی یک مدل دیوار هدایت می شود و چهره در WallSurface با طولانی ترین فاصله از نقطه مرکزی اولین وجه بیرونی دیوارهای ساختمان است. همانطور که در شکل 5 نشان داده شده است ، از این تقاطع، مدل دیوار A انتخاب شده و نمای دیوار a به عنوان اولین وجه خارجی برای پوسته بیرونی تعیین می شود.
(2) سایر مدلهای دیوار با استفاده از توپولوژی همسایه و مدل دیوار انتخابی تعیین میشوند، بنابراین چهره دیگری انتخاب میشود. همانطور که در شکل 5 نشان داده شده است ، مدل دیوار A و دیوار مدل B دارای یک رابطه همسایه توپولوژیکی هستند، زیرا آنها وجهی را که با رنگ قرمز مشخص شده به اشتراک می گذارند. از آنجایی که مدل دیوار A انتخاب شد، مدل دیوار B به عنوان کاندید راه اندازی شد و وجوه هندسی آن آزمایش شد. از آنجایی که وجه b در دیوار B از نظر توپولوژیکی با اولین وجه خارجی a در دیوار A مرتبط است ، وجه b به عنوان دومین وجه خارجی پوسته خارجی دیوارها انتخاب می شود.
(3) این انتشار اتصال توپولوژیکی و انتخاب چهره همسایه منجر به به دست آوردن تمام وجوه خارجی مدل های دیوار می شود. نمونه ای از یک مدل ساختمان سه بعدی در شکل 6 الف نشان داده شده است و تمام دیوارها در شکل 6 ب نشان داده شده اند. پس از استخراج، پوسته های بیرونی دیوارها به دست می آیند، همانطور که در شکل 6 ج نشان داده شده است.
این روش مخصوصاً برای دیوارهایی با چندین وجه عمودی مهم است. دیواری با چند وجه عمودی ممکن است در یک طرف دارای وجوه خارجی زیادی باشد. علاوه بر این، دو یا چند دیوار عمودی ممکن است توسط چهره های دیگر در جهات مختلف به هم متصل شوند. برای دیوارهای پیچیده نشان داده شده در شکل 7 الف، هشت مدل دیوار وجود دارد که هر کدام با یک سطح چند سطحی نشان داده شده است. این روش، چهرههای عمودی بیرونی دیوارها و وجوه اتصال بین آنها را در جهت افقی یا عمودی از طریق فرآیند اتصال به صورت شناسایی میکند [ 4]]، که برای اتصال توپولوژیکی و ساخت حجمی به دلیل نیاز به هندسه سه بعدی بسته و ضد آب حیاتی است. در مقایسه با مدل دیوار عمودی یکنواخت، هنگام استفاده از MultiSurface ، بیش از یک چهره به عنوان پوسته بیرونی از هر مدل دیوار انتخاب می شود . وجوه بیرونی تمام دیوارها در شکل 7 b,c نشان داده شده است.
مدل سقف شبیه مدل دیواری با چند روف سرفیس یا یک روف سرفیس است . مهمتر از آن، این روش همچنین با موفقیت چهره های سقف بیرونی را از مدل های سقف استخراج می کند، صرف نظر از اینکه یک ساختمان یک یا چند مدل سقف دارد. شکل 8 نمونه ای از چهره های خارجی مدل های سقف را نشان می دهد. یک مدل سقف پیچیده در شکل 8 a نشان داده شده است، در حالی که شکل 8 b شکل دقیق یک گوشه سقف را نشان می دهد. همانطور که در شکل 8 ج نشان داده شده است، می توان این اشکال را نیز به درستی مدیریت کرد .
4.3. تعمیر درب و پنجره
بر اساس نتایج تحلیل معنایی، تنها بخشی از ویژگیهای ساختمان در فایل CityGML در ساخت شی حجمی سهبعدی، همانطور که در فیلتر ویژگی در بخش 4.1 توضیح داده شده است، دخیل هستند . بر اساس سازمان داده CityGML، دیوارها شامل سوراخ هایی برای درها یا پنجره ها هستند. قابل توجه است که یک سوراخ سه بعدی توسط چهار یا چند وجه در مدلی که پنجره ها حذف شده بودند تشکیل شده است. بنابراین، باید سوراخهای تشکیلدهنده وجهها را کنترل کرد و دیوارهای حاوی سوراخها را باید پر کرد تا دیوارها به یک جسم یکپارچه تبدیل شوند.
در اینجا، ما جزئیات مربوط به پردازش پنجره را ارائه می دهیم. پنجره ها عمدتاً سوراخ های هندسی در دیوارها هستند. برای دیوارهایی که دارای پنجره هستند، نمای دیوار شامل دو عنصر است: <gml:exterior> برای علامت گذاری مرزهای بیرونی سطح دیوار و <gml:interior> برای علامت گذاری سوراخ های سطح. خطوط قرمز در شکل 1 ، مرزهای بیرونی دیوار و خطوط آبی، مرزهای داخلی (یعنی مرزهای بیرونی پنجره ها) هستند. همانطور که در بخش 4.2 توضیح داده شدنماهای خارجی مدل های دیوار قبلاً استخراج شده است و سوراخ 3 بعدی به یک سوراخ دو بعدی روی صفحه دیوار تبدیل می شود. برای ترمیم حفرههایی که در اثر حذف پنجرهها ایجاد میشود، حذف چهرههای بیش از حد به دلیل قرارگیری پنجرهها الزامی است. چهره های بیش از حد را می توان با استفاده از <gml:interior> به همراه روابط مجاور بین چهره ها که سوراخ ها را تشکیل می دهند حذف کرد. سپس، سطح دیوار حاوی سوراخها را میتوان با یک صفحه دوبعدی همسطح پر کرد تا سوراخهای دیوارها یا سقفها را که ناشی از گنجاندن پنجرهها است، ترمیم کند. در طول پردازش، تمام مختصات شکل برای نشان دادن مکان های دقیق اصلی دیوارها و درب حفظ می شود و معنای متناظر آنها ثبت می شود.
4.4. ساخت و ساز حجمی سه بعدی با اتصال دیوارها، سقف ها و کف ها
پس از استخراج نماهای دیوار خارجی و وجه های سقف، ساخت حجمی سه بعدی ساختمان های سه بعدی با طرح این سوال مورد توجه قرار می گیرد که چگونه می توان فضای حجمی سه بعدی را بست؟ برای پوشاندن ساختمان در یک حجم سه بعدی، نمای بیرونی دیوارها، سقف و زمین باید طراحی شود. سه مرحله زیر برای تکمیل این کار انجام می شود: (1) پر کردن زمین، (2) گسترش دیوارها به سقف، و (3) اعتبار سنجی جسم حجمی 3 بعدی حاصل.
برای پر کردن زمین، در صورت وجود طبقه همکف، وجه بالایی که به دیوار متصل می شود انتخاب می شود. در غیر این صورت، با استفاده از ردپای دیوارها، چهره جدیدی برای پرکردن کف ساختمان ها اضافه می شود.
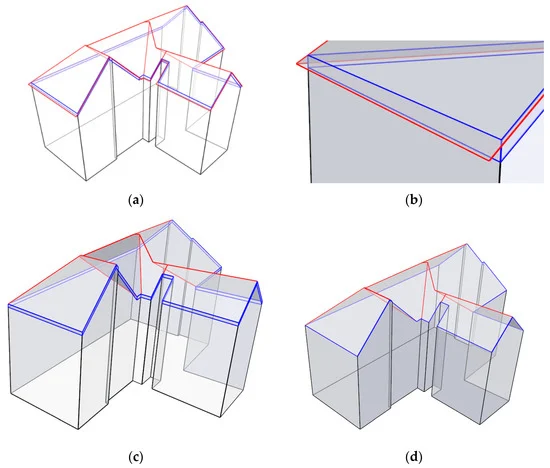
با استفاده از دیوارهای بیرونی و سقف های بیرونی ساختمان، می توان شکاف های بین سقف و دیوارها را شناسایی کرد. بنابراین، یک فرآیند اتصال و اتصال بین دیوارها و سقف مورد نیاز است. برخلاف بازسازی ساختمان و اکستروژن مستقیم ردپاهای ساختمان، برای حفظ شکل دقیق ساختمان، دیوارها و سقف ها با گسترش دیوارهای خارجی موجود با پنجره ها و درهای داخل به هم متصل می شوند. در مورد یک وجه عمودی واحد، تمام دیوارهای خارجی مستقیماً کشیده می شوند. همانطور که در شکل 9 الف نشان داده شده است، در مورد چند وجهی عمودی، دیوارهای خارجی مجاور بامها گسترش یافته است . همانطور که در شکل 9 نشان داده شده استب، وجههای سقف با خطوط قرمز نشان داده میشوند و وجهههای دیوار امتداد یافتهاند، که با یک سقف (که با خطوط آبی نشان داده میشود) تلاقی میکنند. با توجه به نتایج حاصل از گسترش و تقاطع، سطوح سقف به دو نوع تقسیم می شوند. یک نوع نمای سقف دقیقاً با دیوارها مطابقت دارد و مستقیماً در بالای ساختمان قرار می گیرد، در حالی که نوع دیگر سقف دارای لبه ای است که کمی فراتر از بدنه ساختمان امتداد دارد. از آنجایی که لبهها بر حجم ساختمان تأثیر نمیگذارند، همانطور که در شکل 9 نشان داده شده است، حذف میشوند . سپس، از آنجایی که دیوار و امتداد آن سازگار هستند، همانطور که در شکل 9 d نشان داده شده است، با هم متحد و ذوب می شوند.
در این نقطه تمام وجوه مرزی ساختمان ایجاد شده است. تمام اشکال هندسی مربوط به دیوارها، درها، سقفها و زمین برای ساختن یک ساختمان حجمی سهبعدی استفاده شدهاند، و همه وجوه با استفاده از اتصال همسایه [4، 33] به هم متصل و چسبانده شدهاند تا یک حجم سهبعدی را پوشش دهند . اکنون، میتوانیم هندسه سه بعدی ایجاد شده را با استفاده از قوانین شرح داده شده در [ 34 ، 35 ، 36 ، 37 ] تأیید کنیم.
در طول فرآیندهایی که در بالا توضیح داده شد، ما معنایی اشیاء CityGML را همراه با هندسی آنها حفظ کردیم. بنابراین، دیوارها، سقفها، زمینها، درها و پنجرهها مکان خود را در ساختمان حجمی سه بعدی حفظ میکنند، همانطور که در موارد مفصل ارائه شده در بخش 5 نشان داده شده است .
مدلهای حجمی سهبعدی با پنجرهها، درها و سقفهای معنایی یا برچسبدار میتوانند به کاربران در درک معنایی و مکان چنین عناصری کمک کنند، در حالی که مدلهای سادهشده که این عناصر را در بر نمیگیرند میتوانند مقدار دادههای مورد نیاز را با حفظ هندسه حجمی سهبعدی ساختمان به حداقل برسانند. .
4.5. فشرده سازی هندسی فضای حجمی سه بعدی
یک ساختمان حجمی سه بعدی را می توان با استفاده از روش های فوق برای به دست آوردن فضای حجمی سه بعدی ساختمان ساخت. عناصر ساختمانی (یعنی دیوارها، سقفها، درها و پنجرهها) در CityGML LoD3 با ضخامت بر اساس پوسته بیرونی استخراج شدند و در عین حال هندسی خود را حفظ کردند تا مکان خود را در ساختمان در چهار مرحله قبل نشان دهند. آخرین مرحله روش ما ساده سازی ساختمان حجمی سه بعدی و تبدیل آن به یک شیء سه بعدی خالص با توصیف معنایی خالص از “ساختمان” است که می تواند به عنوان یک بسته سه بعدی در یک کاداستر سه بعدی در نظر گرفته شود. این ساده سازی با ادغام وجه های همسطح اشیاء CityGML LoD3 بدون تغییر مرزها و شکل ساختمان انجام می شود. دو نوع موقعیت همسطح وجود دارد: (1) همان نوع شیء همسطح هستند (مثلاً چندین دیوار یک دیوار جانبی را تشکیل می دهند) و (2) انواع شیء مختلف همسطح هستند (مثلاً یک دیوار دارای در و پنجره است). تمام وجوه همسطح را می توان با بی توجهی به معنایی عناصر ساختمان ساده کرد. از آنجایی که “صورت های شکاف کوچک” با گسترش دیوار ایجاد می شوند، از نظر معنایی به دیوار تعلق دارند. بنابراین، این وجه ها با وجه های دیوار اصلی ادغام می شوند تا از یک طرف یک دیوار جامد تشکیل دهند، همانطور که در نشان داده شده است.شکل 10 g,h. پس از این مرحله، هیچ بخشی از ساختمان تمایز معنایی نخواهد داشت، اما ساختمان سه بعدی در یک فضای بسته سه بعدی که توسط یک جامد سه بعدی توصیف می شود، متحد می شود. علاوه بر این، این مدل را می توان در CityGML LoD2 با استفاده از هندسه جامد تبدیل و بازیابی کرد.
5. اجرا و نتایج تجربی
بر اساس روشی که در بالا برای ساخت و ساده سازی یک ساختمان حجمی سه بعدی توضیح داده شد، یک پیاده سازی با استفاده از پلتفرم Google SketchUp و زبان توسعه Ruby انجام شد. این پلتفرم یک رایانه شخصی با یک پردازنده Intel(R) Core i3 3.2 گیگاهرتز و 4.00 گیگابایت رم با سیستم عامل Microsoft Windows 7 Professional x64 بود. نویسندگان یک تغییر فضای سه بعدی را برای ساخت و ساز حجمی سه بعدی خودکار از عناصر ساختمان LoD3 اجرا کردند، مکان درها و پنجره ها را حفظ کردند و مدل ها را در قالب فایل های SketchUp و CityGML ذخیره کردند.
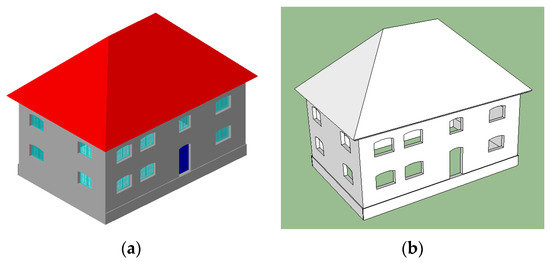
برای این مقاله، سه مورد از دادههای LoD3 (دانلود شده از وبسایت رسمی CityGML) برای تأیید امکانسنجی روش پیشنهادی استفاده شد. مورد اول یک ساختمان منفرد است که شامل یک در، 10 پنجره، پنج دیوار و سه سقف، در مجموع 910 وجه است، همانطور که در شکل 10 الف نشان داده شده است، که با استفاده از نرم افزار FZK به تصویر کشیده شده است. پس از وارد کردن کیس به SketchUp، مدل های در و پنجره بر اساس اطلاعات معنایی آنها فیلتر شدند ( شکل 10 ب). در مرحله بعد، نمای بیرونی مدل های دیوار و سقف استخراج شد ( شکل 10 ج)، و صورت های زمین، در و پنجره تعمیر شد ( شکل 10 د). صفحات دیوار به گونه ای گسترش یافتند که با وجه های سقف تلاقی کنند ( شکل 10ه) و لبه لبه ها حذف شد ( شکل 10 f). در نهایت، یک ساختمان حجمی سه بعدی تولید شد ( شکل 10 g). برای فشرده سازی بیشتر هندسه ساختمان سه بعدی، وجوه همسطح در یک وجه ادغام شدند ( شکل 10 h) تا شکل جامد خالص ساختمان به دست آید، همانطور که در شکل 10 نشان داده شده است . همانطور که توسط نتایج ساخت ساختمان حجمی سه بعدی نشان داده شد، ساختمان سه بعدی با مکان های هندسی تصفیه شده درها، پنجره ها، سقف ها و زمین شامل 26 وجه بود ( شکل 10 گرم). در طی این روش ها، مکان و شکل پنجره ها، درها و دیوارها به طور دقیق و بدون تغییر حفظ می شد. پس از ساده سازی وجوه همسطح، فضای ساختمان سه بعدی خالص حاصل می شود ( شکل 10ط) شامل شش چهره است. در طول تمام این مراحل، شکل بیرونی ساختمان – یا به طور دقیق تر، فضای سه بعدی ساختمان سه بعدی – پایدار است، که برای تحلیل محاسباتی مدیریت فضای سه بعدی در کاداسترهای سه بعدی و سایر کاربردها (به عنوان مثال، تخمین گرما) حیاتی است. ).
برای آزمایش بیشتر روش های شرح داده شده در این مقاله، دو مجموعه ساختمانی پیچیده تر انتخاب شدند، همانطور که در شکل 11 و شکل 12 نشان داده شده است . شش ساختمان مستقل از داده های CityGML LoD3 انتخاب شدند ( شکل 11 a)، که سه ساختمان دارای چندین دیوار عمودی هستند. مراحل میانی فیلتر شی و ساخت حجمی سه بعدی ساختمان در شکل 11 ب نشان داده شده است. ساخت ساختمان حجمی سه بعدی پس از چهار مرحله از مراحل درگیر در روش ما در شکل 11 ج نشان داده شده است، و مدل جامد نهایی در شکل 11 d نشان داده شده است.
شکل 12 مطالعه موردی ساختمان های مجاور را نشان می دهد که با ساختمان های مستقل در شکل 11 تفاوت دارند . در داده های واقعی، برخی از ساختمان ها دارای در و پنجره هستند. روشی که در اینجا توضیح داده شد می تواند با موفقیت پوسته بیرونی یک ساختمان را استخراج کند و رابطه همسایگی بین ساختمان ها را بدون تغییر مرزهای آن ساختمان ها حفظ کند. ساختمان های حجمی سه بعدی با مکان های دقیق در و پنجره در شکل 12 ب و ساختمان های حجمی سه بعدی ساده شده در شکل 12 ج نشان داده شده اند.
موارد مختلف در شکل 10 ، شکل 11 و شکل 12 نشان می دهد که چگونه ساخت فضای ساختمان سه بعدی دقیق از چندین عنصر ساختمانی در CityGML LoD3 با استفاده از روش پیشنهادی انجام می شود، که با موفقیت چندین عنصر ساختمان را به حجم های سه بعدی تبدیل می کند. برای در نظر گرفتن الزامات ذخیره سازی داده ها، نتایج را قبل و بعد از ساخت حجمی سه بعدی مقایسه می کنیم. جدول 1 و جدول 2آمار شی CityGML موارد 2 و 3 را به ترتیب فهرست کنید. مجموعا 19365 چهره برای مورد 2 و 3366 چهره در مورد 3 در داده های اصلی CityGML LoD3 استفاده شده است. با این حال، پس از اعمال روش پیشنهادی، ساختمانهای حجمی سهبعدی به ترتیب تنها به 188 و 167 وجه برای موارد 2 و 3 نیاز داشتند، و پس از سادهسازی، ساختمانهای حجمی سه بعدی یکپارچه نهایی تنها به 66 وجه برای مورد 2 و 132 وجه برای مورد 3 نیاز داشتند. در طول مراحل، مقدار داده ها به طور قابل توجهی در مقایسه با داده های ورودی اولیه کاهش یافت، در حالی که مکان درها و پنجره ها برای حفظ اثر تجسم عالی حفظ شد. این کاهش دادهها به این دلیل رخ داده است که دیوارهای عمودی معمولاً با هم وجود دارند، حاوی درها و پنجرهها هستند و عموماً با یک وجه برای هر ضلع نشان داده میشوند، به جز زمانی که چندین نما در یک طرف رخ میدهند.
برای برآورده کردن الزامات تجسم، ساختمانهای حجمی سهبعدی حاصل را میتوان بهعنوان مدلهای جامد که اشیاء را در CityGML LoD2 نشان میدهند ذخیره کرد یا میتوانند بهعنوان فایلهای X3D، VRML یا KML ذخیره شوند.
6. بحث و نتیجه گیری
از نقطه نظر به دست آوردن کل فضای ساختمان سه بعدی برای کاداسترهای سه بعدی، این مقاله روشی را برای اجرای ساختار حجمی سه بعدی مورد نیاز برای کاربرد کاداستر سه بعدی با تجسم نقشه برداری مربوط به فشرده سازی هندسی ادغام می کند. ابتدا، مقاله داده های هندسی عناصر ساختمان را دوباره سازماندهی می کند تا یک فضای حجمی سه بعدی از کل ساختمان ایجاد کند. از دیدگاه کاداستر، یک بسته سه بعدی باید دارای فضای حجمی سه بعدی دقیق با حقوق همگن باشد. هنگامی که در خانه ها و ساختمان ها اجرا می شود، یک بسته سه بعدی باید فضای حجمی سه بعدی ساختمان باشد. با این حال، داده های BIM یا CityGML فعلی، از دیدگاه موجودیت، اجزا و عنصر ساختمان را توصیف می کند، اما حجم آن را توصیف نمی کند. این تغییر منطقی فضا برای فضای کاداستر سه بعدی و مدیریت فضای سه بعدی تفاوت در مفهوم ارائه شده در این مقاله در مقایسه با کاربردهای تجسم سه بعدی قبلی است. دوم، ساختمان های سه بعدی به دست آمده ساده ترین شکل هندسی ممکن را بدون تغییر مکان ها و مختصات خطوط مرزی بیرونی و چهره ساختمان ها دارند. مرزهای فضای کاداستر سه بعدی نه تنها مکان های هندسی/جغرافیایی را توصیف می کند، بلکه دارای معانی حقوقی مربوط به حقوق قانونی (مانند مالکیت، تصدی) اشغال فضا نیز می باشد. در نتیجه، در طول ساخت و ساز و ساده سازی فضای ساختمان سه بعدی، روش پیشنهادی، مرزهای دقیق ساختمان را حفظ می کند و همزمان داده های هندسی ساختمان را فشرده می کند، همانطور که در آزمایش ها نشان داده شده است. ساختمان های سه بعدی حاصل ساده ترین شکل هندسی ممکن را بدون تغییر مکان ها و مختصات خطوط مرزی بیرونی و چهره ساختمان ها دارند. مرزهای فضای کاداستر سه بعدی نه تنها مکان های هندسی/جغرافیایی را توصیف می کند، بلکه دارای معانی حقوقی مربوط به حقوق قانونی (مانند مالکیت، تصدی) اشغال فضا نیز می باشد. در نتیجه، در طول ساخت و ساز و ساده سازی فضای ساختمان سه بعدی، روش پیشنهادی، مرزهای دقیق ساختمان را حفظ می کند و همزمان داده های هندسی ساختمان را فشرده می کند، همانطور که در آزمایش ها نشان داده شده است. ساختمان های سه بعدی حاصل ساده ترین شکل هندسی ممکن را بدون تغییر مکان ها و مختصات خطوط مرزی بیرونی و چهره ساختمان ها دارند. مرزهای فضای کاداستر سه بعدی نه تنها مکان های هندسی/جغرافیایی را توصیف می کند، بلکه دارای معانی حقوقی مربوط به حقوق قانونی (مانند مالکیت، تصدی) اشغال فضا نیز می باشد. در نتیجه، در طول ساخت و ساز و ساده سازی فضای ساختمان سه بعدی، روش پیشنهادی، مرزهای دقیق ساختمان را حفظ می کند و همزمان داده های هندسی ساختمان را فشرده می کند، همانطور که در آزمایش ها نشان داده شده است. ، مالکیت ، تصدی) اشغال فضا. در نتیجه، در طول ساخت و ساز و ساده سازی فضای ساختمان سه بعدی، روش پیشنهادی، مرزهای دقیق ساختمان را حفظ می کند و همزمان داده های هندسی ساختمان را فشرده می کند، همانطور که در آزمایش ها نشان داده شده است. ، مالکیت ، تصدی) اشغال فضا. در نتیجه، در طول ساخت و ساز و ساده سازی فضای ساختمان سه بعدی، روش پیشنهادی، مرزهای دقیق ساختمان را حفظ می کند و همزمان داده های هندسی ساختمان را فشرده می کند، همانطور که در آزمایش ها نشان داده شده است.
به طور فزاینده ای، مدل های سه بعدی شهر مانند CityGML و IFC به عنوان ورودی داده های استاندارد توسط تعداد فزاینده ای از دفاتر نقشه برداری پذیرفته می شوند. با این حال، نمایشهای حجمی سهبعدی ساختمانها نه تنها برای تحلیل و محاسبات فضایی، بلکه برای مدیریت کاداستر سهبعدی و فضای ملکی نیز ضروری است. این مقاله یک تغییر فضای سه بعدی دقیق را برای ساختن یک هندسه ساختمان سه بعدی واقعی ساده شده از عناصر ساختمانی چندگانه در داده های 3D CityGML LoD3 بدون ایجاد تغییر مکان یا جابجایی مرزهای فضای ساختمان سه بعدی پیشنهاد می کند. این رویکرد از استخراج مرزهای سه بعدی و اتصالات چهره برای نمایش ساختمان های حجمی سه بعدی استفاده می کند. الگوریتم پنج مرحله ای به دو دلیل کاملاً مؤثر است. از یک سو، فضای حجمی سه بعدی ساختمان های سه بعدی به دست می آید و دقیقاً حفظ می شود تا حجم هندسه سه بعدی که در ابتدا توسط عناصر ساختمانی متعدد بیان می شد حفظ شود. این مدل ساده شده پشتیبانی بهتری را برای زمینه هایی مانند مدیریت کاداستر سه بعدی ارائه می دهد و همچنین می تواند برای پردازش چندین ساختمان مجاور استفاده شود. از سوی دیگر، ساخت ساختمان های حجمی سه بعدی را نیز ساده می کند و در نتیجه به ضریب فشرده سازی بالایی از داده های هندسی دست می یابد که با معیارهای هندسه سه بعدی در ISO 19107 و GML مطابقت دارد. نتایج می تواند به طور موثر توسط شهرداری های شهری برای مدیریت فضاهای دارایی سه بعدی و پشتیبانی از برنامه ریزی فضای سه بعدی استفاده شود. این مدل ساده شده پشتیبانی بهتری را برای زمینه هایی مانند مدیریت کاداستر سه بعدی ارائه می دهد و همچنین می تواند برای پردازش چندین ساختمان مجاور استفاده شود. از سوی دیگر، ساخت ساختمان های حجمی سه بعدی را نیز ساده می کند و در نتیجه به ضریب فشرده سازی بالایی از داده های هندسی دست می یابد که با معیارهای هندسه سه بعدی در ISO 19107 و GML مطابقت دارد. نتایج می تواند به طور موثر توسط شهرداری های شهری برای مدیریت فضاهای دارایی سه بعدی و پشتیبانی از برنامه ریزی فضای سه بعدی استفاده شود. این مدل ساده شده پشتیبانی بهتری را برای زمینه هایی مانند مدیریت کاداستر سه بعدی ارائه می دهد و همچنین می تواند برای پردازش چندین ساختمان مجاور استفاده شود. از سوی دیگر، ساخت ساختمان های حجمی سه بعدی را نیز ساده می کند و در نتیجه به ضریب فشرده سازی بالایی از داده های هندسی دست می یابد که با معیارهای هندسه سه بعدی در ISO 19107 و GML مطابقت دارد. نتایج می تواند به طور موثر توسط شهرداری های شهری برای مدیریت فضاهای دارایی سه بعدی و پشتیبانی از برنامه ریزی فضای سه بعدی استفاده شود.
منابع
- کپل، سی. النجار، من; شارپیله، اف. پومورسکی، دی. مدل شهر سه بعدی مجازی برای ناوبری در مناطق شهری. جی. اینتل. سیستم رباتیک 2012 ، 66 ، 377-399. [ Google Scholar ] [ CrossRef ]
- ون اوستروم، پی. استوتر، جی. پلوگر، اچ. تامپسون، آر. Karki، S. فهرست جهانی وضعیت کاداسترهای سه بعدی در سال 2010 و انتظارات برای سال 2014. در مجموعه مقالات هفته کاری FIG 2011 “پل زدن شکاف بین فرهنگ ها” و ششمین کنگره ملی ONIGT، مراکش، مراکش، 18-22 می 2011; ONIGT: رباط، مراکش، 2011; صص 117-122. [ Google Scholar ]
- یینگ، اس. لی، ال. Guo, R. ساخت سیستم کاداستر سه بعدی بر اساس نقشه های نقشه برداری دو بعدی با SketchUp. ژئو اسپات. Inf. علمی 2011 ، 14 ، 129-136. [ Google Scholar ] [ CrossRef ]
- یینگ، اس. گوا، آر. لی، ال. ون اوستروم، پی. Stoter, J. ساخت اشیاء حجمی سه بعدی برای یک سیستم کاداستر سه بعدی. ترانس. GIS 2015 ، 19 ، 758-779. [ Google Scholar ] [ CrossRef ]
- D’Silva، MG; اسپکمن، بی. Westenberg، MA; van Hee, KM مطالعه امکان سنجی در CityGML برای اهداف کاداستر. پایان نامه کارشناسی ارشد، Technische Universiteit Eindhoven، آیندهوون، هلند، 2009. [ Google Scholar ]
- بیلجکی، اف. لدوکس، اچ. Stoter, J. انتشار خطا در محاسبه حجم در مدل های سه بعدی شهر با روش مونت کارلو. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2014 ، 2 ، 31-39. [ Google Scholar ] [ CrossRef ]
- کاریون، دی. لورنز، ا. Kolbe، TH برآورد وضعیت توانبخشی پر انرژی ساختمان ها برای شهر برلین با استفاده از یک مدل شهر سه بعدی ارائه شده در CityGML. ISPRS Int. قوس. فتوگرام اسپات سنجش از دور. Inf. علمی 2010 ، 38 ، 31-35. [ Google Scholar ]
- کروگر، آ. Kolbe، TH تجزیه و تحلیل ساختمان برای برنامه ریزی انرژی شهری با استفاده از شاخص های کلیدی در مدل های شهری سه بعدی مجازی – اطلس انرژی برلین. در مجموعه مقالات آرشیو بین المللی ISPRS فتوگرامتری، سنجش از دور و علوم اطلاعات فضایی، ملبورن، استرالیا، 25 اوت تا 1 سپتامبر 2012. جلد 39، ص 145–150.
- زلاتانوا، اس. رحمان، ع. Shi, W. مدلها و چارچوبهای توپولوژیکی برای اشیاء فضایی سه بعدی. محاسبه کنید. Geosci. 2004 ، 30 ، 419-428. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بیلجکی، اف. لدوکس، اچ. استوتر، جی. ژائو، جی. رسمی سازی سطح جزئیات در مدل سازی سه بعدی شهر. محاسبه کنید. محیط زیست سیستم شهری 2014 ، 48 ، 1-15. [ Google Scholar ] [ CrossRef ]
- گایگر، ا. بنر، جی. Haefele, K. تعمیم مدل های ساختمانی سه بعدی IFC. در علوم زمین اطلاعات سه بعدی، یادداشت های سخنرانی در اطلاعات جغرافیایی و نقشه برداری ؛ Breunig، M.، AI-Doori، M.، Butwilowski، E.، Kuper، P.، Benner، J.، Haefele، K.، Eds. انتشارات بین المللی Springer: چم، سوئیس، 2015; صص 19-35. [ Google Scholar ]
- فن، اچ. Meng, L. یک رویکرد سه مرحله ای برای ساده سازی ساختمان های سه بعدی مدل سازی شده توسط CityGML. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 1091-1107. [ Google Scholar ] [ CrossRef ]
- او هست.؛ مورو، جی. مارتین، تعمیم سه بعدی بر اساس JY Footprint گروه های ساختمانی برای تجسم شهر مجازی. در مجموعه مقالات پردازش GEO 2012: چهارمین کنفرانس بین المللی سیستم های اطلاعات جغرافیایی پیشرفته، برنامه ها و خدمات، والنسیا، اسپانیا، 30 ژانویه تا 4 فوریه 2012. صص 177-182.
- بوچین، ک. میلمنز، دبلیو. Speckmann, B. روشی جدید برای سادهسازی تقسیمبندی با کاربردهای تعمیم ناحیه شهری. در مجموعه مقالات نوزدهمین کنفرانس بینالمللی ACM SIGSPATIAL در مورد پیشرفتها در سیستمهای اطلاعات جغرافیایی، شیکاگو، IL، ایالات متحده آمریکا، 1–4 نوامبر 2011. ص 261-270.
- مائو، بی. بان، ی. هری، L. یک ساختار داده چندگانه برای تجسم پویا مدل های شهر سه بعدی تعمیم یافته. ISPRS J. Photogramm. Remote Sens. 2011 ، 66 ، 198-208. [ Google Scholar ] [ CrossRef ]
- بایگ، SU; Rahman, AA یک استراتژی سه مرحله ای برای تعمیم مدل های ساختمان سه بعدی بر اساس مشخصات CityGML. GeoJournal 2013 ، 78 ، 1013-1020. [ Google Scholar ] [ CrossRef ]
- Kada, M. تعمیم خودکار مدل های ساختمان سه بعدی. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2002 ، 34 ، 243-248. [ Google Scholar ]
- Kada، M. سادهسازی مدلهای ساختمان سهبعدی وابسته به مقیاس بر اساس تجزیه سلولی و نمونهسازی اولیه. در نظریه اطلاعات مکانی ; Winter, S., Duckham, M., Kulik, L., Kuipers, B., Eds. Springer Verlag: برلین، آلمان، 2007; ص 222-237. [ Google Scholar ]
- اندرس، ک.-اچ. سطح تولید جزئیات گروههای ساختمانی سه بعدی با تجمیع و تایپسازی. در مجموعه مقالات بیست و دوم کنفرانس بین المللی کارتوگرافی، لاکرونیا، اسپانیا، 9 تا 16 اوت 2005.
- Mayer, H. Scale-spaces for generalization of 3D buildings. بین المللی جی. جئوگر. Inf. علمی 2005 ، 19 ، 975-997. [ Google Scholar ] [ CrossRef ]
- مائو، بی. هری، ال. روش برای توزیع پیشرونده کارآمد و تجسم اشیاء ساختمانی سه بعدی. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 185. [ Google Scholar ] [ CrossRef ]
- استیور، اچ. ماچل، تی. سیندرام، م. لیبل، ال. Kolbe, T. Voluminator – تقریب حجم ساختمانهای سه بعدی برای غلبه بر خطاهای توپولوژیکی. در AGILE 2015 ; Bacao, F., Santos, MY, Painho, M., Eds. انتشارات بین المللی Springer: چم، سوئیس، 2015; صص 343-362. [ Google Scholar ]
- Thiemann, F. تعمیم داده های ساختمان سه بعدی. ISPRS Int. قوس. فتوگرام اسپات سنجش از دور. آگاه کردن. علمی 2002 ، 34 ، 286-290. [ Google Scholar ]
- تیمن، اف. Sester, M. تقسیم بندی ساختمان ها برای تعمیم سه بعدی. در مجموعه مقالات هفتمین کارگاه ICA در مورد تعمیم و بازنمایی چندگانه، لستر، بریتانیا، 20 تا 21 اوت 2004.
- تیمن، اف. Sester, M. 3D-symbolization با استفاده از الگوهای تطبیقی. در مجموعه مقالات سمپوزیوم دوم کمیسیون فنی ISPRS، وین، اتریش، 12 تا 14 ژوئیه 2006. ص 49-54.
- فوربرگ، الف. تعمیم داده های ساختمان سه بعدی بر اساس رویکرد مقیاس-فضا. در مجموعه مقالات بیستمین کنگره ISPRS IRPRS، استانبول، ترکیه، 12 تا 23 ژوئیه 2004. جلد 35، ص 194–199.
- فوربرگ، الف. تعمیم داده های ساختمان سه بعدی بر اساس رویکرد مقیاس-فضا. ISPRS J. Photogramm. Remote Sens. 2007 ، 62 ، 104-111. [ Google Scholar ] [ CrossRef ]
- Van Oosterom, P. تحقیق و توسعه در کاداسترهای سه بعدی. محاسبه کنید. محیط زیست سیستم شهری 2013 ، 40 ، 1-6. [ Google Scholar ] [ CrossRef ]
- گروگر، جی. کلبه، تی. چروینسکی، آ. Nagel, C. OGC شهر جغرافیای شهر نشانه گذاری زبان (CityGML) استاندارد رمزگذاری ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، ایالات متحده آمریکا، 2012. [ Google Scholar ]
- گروگر، جی. Plümer, L. CityGML—مدل های شهری سه بعدی معنایی قابل تعامل. ISPRS J. Photogramm. Remote Sens. 2012 ، 71 ، 12-33. [ Google Scholar ] [ CrossRef ]
- Kolbe، TH BIM، CityGML و استانداردسازی مرتبط. در مجموعه مقالات کنفرانس معماری منظر دیجیتال 2012، برنبورگ/دسائو، آلمان، 31 مه تا 1 ژوئن 2012.
- فن، اچ. منگ، ال. Jahnke، M. تعمیم ساختمان های سه بعدی مدل سازی شده توسط CityGML. در پیشرفت در GIScience ; Sester, M., Bernard, L., Paelke, V., Eds. Springer Verlag: برلین، آلمان، 2009; صص 387-405. [ Google Scholar ]
- دیاکیت، ا. دامیاند، جی. Van Maercke, D. بازسازی توپولوژیکی ساختمانهای پیچیده سه بعدی و استخراج خودکار سطوح جزئیات. در کارگاه Eurographics در مورد مدل سازی داده های شهری و Visualiz ; Besuievsky, G., Tourre, V., Eds. انجمن یوروگرافیک: استراسبورگ، فرانسه، 2014; صص 25-30. [ Google Scholar ]
- جین، اف. یینگ، اس. لی، ال. Guo, R. قوانین اعتبارسنجی و تعمیر جامدات سه بعدی واقعی. Geomat. آگاه کردن. علمی دانشگاه ووهان 2015 ، 40 ، 258-263. [ Google Scholar ]
- کرکی، س. تامپسون، آر. McDougall, K. اعتبار سنجی داده ها در یک کاداستر سه بعدی. در تحولات در علوم اطلاعات جغرافیایی سه بعدی ; Neutens, T., Maeyer, P., Eds. Springer: برلین هایدلبرگ، آلمان، 2010; صص 92-122. [ Google Scholar ]
- علم، ن. واگنر، دی. ووتزر، ام. فون فالکنهاوزن، جی. کورز، وی. Pries، M. به سوی اعتبار سنجی و بهبود خودکار مدل های CityGML برای سازگاری هندسی و معنایی. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2013 . [ Google Scholar ] [ CrossRef ]
- واگنر، دی. ووتزر، ام. بوگدان، ج. علم، ن. پریس، م. Coors، V. اعتبارسنجی همسانی معنایی هندسی مدلهای CityGML. در حال پیشرفت و روندهای جدید در علوم اطلاعات جغرافیایی سه بعدی ; Springer: برلین، آلمان، 2013; صص 171-192. [ Google Scholar ]
شکل 1. دیوار با در و پنجره در زبان نشانه گذاری جغرافیای شهر (CityGML) LoD3: ( الف ) توضیحات هندسی. ( ب ) تجسم عناصر ساختمان.

شکل 2. گردش کار ساخت شی حجمی سه بعدی و ساده سازی برای داده های CityGML.
شکل 3. ساختمان اصلی ( الف ) و پس از استخراج اشکال هندسی با فیلتر معنایی ( ب ).

شکل 4. نمودار شماتیک یک ساختمان: ( الف ) پرتو چندین خط (دیوار) را قطع می کند. ( ب ) ساختمان با سطوح عمودی متعدد با سطوح افقی متصل.
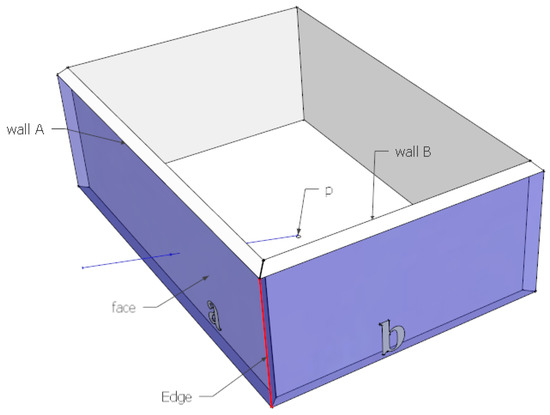
شکل 5. هنگام استخراج وجه بیرونی دیوارها، وجه هایی که دیوار را به هم متصل می کنند .

شکل 6. استخراج نمای بیرونی دیوارها: ( الف ) داده های اصلی. ( ب ) تمام مدلهای دیوار؛ ( ج ) وجوه بیرونی پوسته بیرونی.

شکل 7. استخراج دیوارهای خارجی از چندین وجه عمودی: ( الف ) داده های اصلی. ب ) جداسازی وجه بیرونی و داخلی. و ( ج ) استخراج سطوح دیوار خارجی.
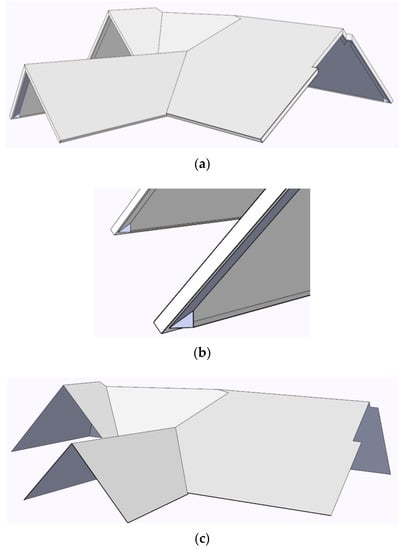
شکل 8. استخراج وجه های سقف خارجی از چندین وجه عمودی: ( الف ) داده های اصلی. ( ب ) داده های پیچیده دقیق مدل سقف. و ( ج ) استخراج نمای دیوارهای خارجی در نماهای مختلف.
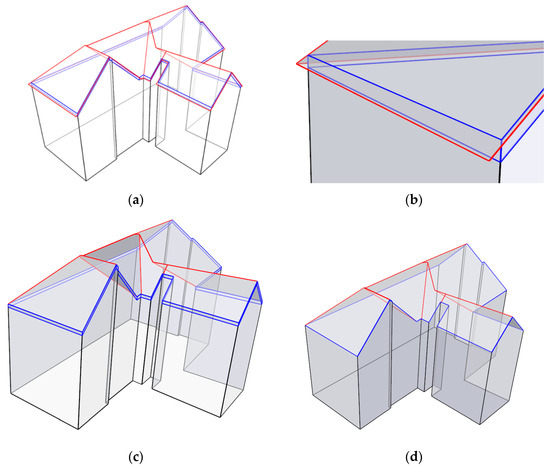
شکل 9. گسترش دیوارها و اتصال آنها با سقف: ( الف ) گسترش دیوارها. ( ب ) جزئیات تقاطع بین دیوار و سطح سقف. ( ج ) حذف لبه بام. و ( د ) ادغام وجه های شکاف دار با وجه های دیوار اصلی.
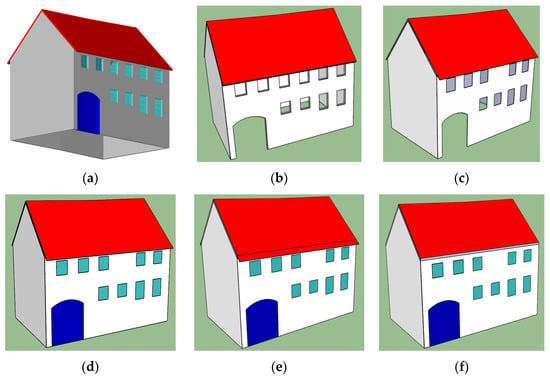

شکل 10. ساخت حجمی سه بعدی یک ساختمان فردی و ساده سازی آن: ( الف ) داده منبع (تجسم با استفاده از نرم افزار FZK). ( ب ) مدل ساختمان با درها و پنجره های فیلتر شده (تجسم در SketchUp). ( ج ) مدل ساختمان با دیوارهای بیرونی. ( د ) مدل ساختمان با نمای بیرونی سقف. ( ه ) مدل ساختمان با در، پنجره ها و زمین تعمیر شده. ( f ) گسترش دیوارها. ( ز ) حذف پیش امدگی لبه بام و ساختمان حجمی سه بعدی. ( h ) ساختمان حجمی سه بعدی با ساده سازی چهره همسطح. و ( i ) یک ساختمان سه بعدی یکپارچه.

شکل 11. ساخت حجمی سه بعدی ساختمان های جداگانه: ( الف ) داده های منبع (تجسم شده توسط نرم افزار FZK). ( ب ) مدل ساختمان با وجههای مرزی کامل درها، پنجرهها، محوطه و پسوند دیوارها. ( ج ) ساختمانهای حجمی سه بعدی با معناشناسی. و ( د ) ساختمانهای حجمی سه بعدی یکپارچه.
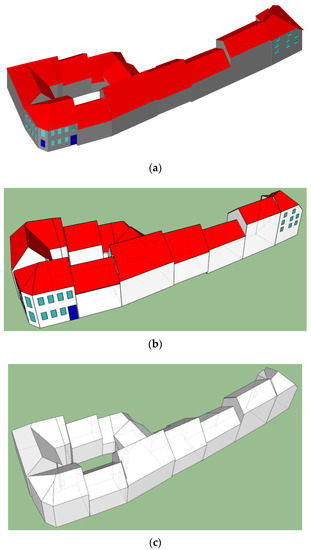
شکل 12. ساخت حجمی سه بعدی ساختمان های مجاور: ( الف ) داده های منبع (تجسم شده توسط نرم افزار FZK). ( ب ) ساختمانهای حجمی سه بعدی با معناشناسی. ( ج ) ساختمانهای حجمی سه بعدی یکپارچه.

جدول 1. آمار اشیاء در مورد 2.
جدول 2. آمار اشیاء در مورد 3.
© 2017 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر