1. معرفی
موقعیتیابی دقت در سطح سانتیمتری را میتوان با استفاده از مشاهده فاز حامل سیستمهای ناوبری ماهوارهای جهانی (GNSS) که در زمینههای نظامی و غیرنظامی استفاده شده است، بدست آورد [ 1 ، 2 ، 3 ]. برای برآورده کردن الزامات موقعیتیابی دقت در سطح سانتیمتری، تکنیک موقعیتیابی سینماتیک در زمان واقعی شبکه حامل (NRTK) معمولا استفاده میشود. یکی از مسائل کلیدی تکنیک موقعیتیابی بلادرنگ مبتنی بر فاز حامل، رفع ابهام در پرواز (OTF) است [ 4 ]]. به طور کلی، هدف OTF AR (تفکیک ابهام) این است که ابهامات را هم به درستی و هم در سریع ترین زمان ممکن از نظر بازه زمانی مشاهدات و زمان محاسبه حل کند. OTF AR به هندسه ایستگاه-ماهواره خوب و سطح پایینی از خطاها و سوگیری های مشاهده نیاز دارد. علاوه بر این، به یک الگوریتم سریع و قابل اعتماد نیاز دارد. در طی چند دهه گذشته، الگوریتمهای AR متعددی توسعه یافتهاند. معروف ترین آنها تکنیک جستجوی ابهام با حداقل مربعات (LSAST) [ 5 ]، رویکرد AR سریع (FARA) [ 6 ]، فیلتر جستجوی ابهام سریع (FASF) [ 7 ] و روش تعدیل همبستگی ابهام با حداقل مربعات هستند. (LAMBDA) [ 8 ، 9]. LAMBDA در حال حاضر یک روش محبوب هم از لحاظ نظری و هم از نظر عملی در بین روشهای تعیین ابهام است. به طور قابل توجهی پیچیدگی محاسباتی مرحله جستجوی ابهام را کاهش می دهد و توسعه RTK را در قرن بیستم ترویج می کند. موقعیت یابی دقیق نقطه (PPP) [ 10 ] یکی دیگر از تکنیک های محبوب برای موقعیت یابی دقیق بر اساس مشاهده فاز حامل است. با این حال، تقریباً 15 دقیقه برای دستیابی به راه حل های ابهام اعداد صحیح قابل اعتماد مورد نیاز است. برای استفاده از هر دو PPP و NRTK، چندین روش برای بهبود عملکرد خدمات PPP در مناطق خاص با استفاده از شبکه های مرجع منطقه ای توسعه داده شده است [ 11 ، 12 ، 13 ]. برای دستیابی به حل ابهام آنی، یک استراتژی جدید پیشنهاد شد [14 ]. در روش پیشنهادی، تأخیرهای جوی با تفاضل صفر دقیق از راهحل ثابت PPP ایستگاههای مرجع به دست میآیند که به ایستگاههای کاربر منتشر و درونیابی میشوند تا مشاهدات فاز L1 یا L2 یا ترکیب آنها را تصحیح کنند. با مشاهدات تصحیح شده، می توان به وضوح ابهام آنی دست یافت، بنابراین به راه حل های موقعیتی معادل شبکه RTK دست یافت.
با توسعه GPS، BDS، GLONASS و Galileo، GNSS وارد عصر جدیدی می شود. سیگنالهای صورت فلکی چندگانه و سیگنالهای چند فرکانس GNSS فرصتها و چالشهایی را برای AR سریع به همراه خواهند داشت. اکثر تحقیقات [ 15 ، 16 ] نشان داده اند که مقدار اولیه و موقعیت سطح سانتی متری را می توان در مدت زمان بسیار کوتاهی با استفاده از مشاهدات چند فرکانس به دست آورد. لی [ 17] به وضوح نشان داد که ادغام چندین GNSS به طور قابل توجهی تعداد ماهواره های مشاهده شده را افزایش می دهد، هندسه مشاهدات فضایی را در یک سایت بهینه می کند و همگرایی، دقت، تداوم و قابلیت اطمینان موقعیت یابی را بهبود می بخشد. در جزئیات، افزودن سیستمهای BDS، Galileo و GLONASS به پردازشهای استاندارد GPS، زمان همگرایی را تقریباً 70% کاهش میدهد و دقت موقعیتیابی را تقریباً 25% بهبود میبخشد. تحقیقات همچنین نشان میدهد که GLONASS و BDS دارای قابلیت بالقوه برای بازیابی پارامترهای جوی در زمان واقعی برای کاربردهای هواشناسی حیاتی مانند GPS هستند و ترکیب مشاهدات چند GNSS میتواند عملکرد یک راهحل تک سیستمی را در هواشناسی بهبود بخشد. برنامه های کاربردی، با دقت و استحکام بالاتر [ 18].
سه/چند حامل AR (TCAR/MCAR) [ 16 ] و وضوح عدد صحیح آبشاری (CIR) [ 19 ] روشهای AR سه/چند حامل معمولی هستند. هر دو TCAR و CIR از یک مدل بدون هندسه برای رفع ابهامات با یک روش گرد کردن سه یا چهار مرحلهای استفاده میکنند که با تاخیر یونوسفر باقیمانده مغایرت دارد. به دنبال این مطالعه، حجم زیادی از کار در مورد AR با فرکانس سهگانه با استفاده از روشهای TCAR/CIR یا TCAR/CIR اصلاحشده انجام شده است. فنگ و لی [ 20 ] از هر دو مدل TCAR مبتنی بر هندسه و بدون هندسه برای پردازش وضوح ابهام استفاده کردند. یک روش TCAR قابل اعتماد بدون فاصله هندسی و یونوسفر در سال 2010 توسط لی و همکاران پیشنهاد شد. [ 21]؛ عاری از اثرات یونوسفر و اصطلاحات هندسی بود. جی و همکاران [ 22 ] یک روش بهبود یافته CAR را ارائه کرد که شامل مزایای هر دو حداقل مربعات عدد صحیح (ILS) و CAR است. گنگ و بوک [ 23 ] روشی را پیشنهاد کردند که در آن سیگنالهای GPS با فرکانس سهگانه ورودی برای فعال کردن همگراییهای سریع به راهحلهای ابهام ثابت در موقعیتیابی نقطه دقیق در زمان واقعی (PPP) مورد سوء استفاده قرار میگیرند. تانگ و همکاران [ 24 ] یک روش AR گام به گام اصلاح شده را بر اساس TCAR پیشنهاد کرد و عملکرد آن را با استفاده از داده های واقعی BDS ارزیابی کرد. کاربرد روش LAMBDA برای مسئله AR چند فرکانس به طور گسترده توسط تعدادی از گروه های تحقیقاتی مورد مطالعه قرار گرفته است [ 24 ، 25 ، 26]. LAMBDA را می توان برای موارد بدون هندسه چند فرکانس یا موارد مبتنی بر هندسه چند فرکانس اعمال کرد. الگوریتم های ذکر شده در بالا همگی می توانند برای AR سیگنال های چند صورت فلکی و چند فرکانس استفاده شوند. با این حال، بسیاری از الگوریتمهای AR که در بالا ذکر شد، به سادگی سیستمهای مختلف را با هم ترکیب میکنند بدون اینکه برتری هر سیستم را به طور کامل به نمایش بگذارند. در این مقاله به این موضوع می پردازیم.
این مقاله بر رفع ابهام مشاهده فاز حامل GNSS بر اساس سیگنالهای فرکانس سهگانه در زمان واقعی تمرکز دارد. مدل ریاضی بکار رفته در این تحقیق در بخش دوم معرفی شده است. بخش سوم روش جدید AR تک دوره ای GNSS را معرفی می کند. عملکرد این روش بر اساس مشاهدات GNSS آزمایش شده است. نتایج آزمون در بخش 4 نشان داده شده است . در نهایت، یک نتیجه گیری وجود دارد.
2. مدل ریاضی
سیگنال های GPS، BDS و Galileo سیگنال های دسترسی چندگانه تقسیم کد (CDMA) هستند. با نادیده گرفتن چند مسیر، اندازه گیری های شبه برد و فاز حامل اختلاف دوگانه آنها (DD) را می توان به صورت [ 27 ] فرموله کرد.
جایی که ∇ Δ ∇∆– اپراتور DD؛
-
i – فرکانس i- ام، به عنوان مثال، GPS L1، L2 یا L5.
-
f – فرکانس (هرتز)؛
-
P – اندازه گیری برد شبه (متر)؛
-
φ – اندازه گیری فاز حامل (چرخه).
-
λ – طول موج (متر)؛
-
ρ – فاصله هندسی از ماهواره تا گیرنده (متر).
-
N – ابهام فاز حامل.
-
K – پارامتر تاخیر یونوسفر مرتبه اول، K = 40.28 TEC. TEC نشان دهنده کل محتوای الکترون است.
-
T – تاخیر تروپوسفر (متر)؛
-
εمن ، پ ،εمن ، ϕ�من،پ ،�من،�– نویز اندازه گیری شبه محدوده و فاز حامل، به ترتیب.
برخلاف GPS/BDS/Galileo، GLONASS از مالتی پلکسی تقسیم فرکانس (FDMA—دسترسی چندگانه تقسیم فرکانس) استفاده میکند تا سیگنالهای ماهوارههای جداگانه را متمایز کند. به دلیل FDMA، مشاهدات فاز حامل و شبه برد GLONASS از تعصبات بین کانالی (ICBs) رنج می برند. اثرات ICB های گیرنده از کانالی به کانال گیرنده مشابه متفاوت است و با تکنیک DD پایه حذف نمی شود [ 28]]. علاوه بر این، ICB های گیرنده در اندازه گیری فاز کد و حامل متفاوت هستند. با این حال، فرآیند GLONASS AR در مقایسه با GPS به دلیل ساختار سیگنال FDMA پیچیدهتر است. حداقل یک ماهواره GLONASS در رصد DD شرکت می کند، طول موج ها دیگر یکسان نیستند، و معادله (2) دیگر نمی تواند به این شکل بدون از دست دادن مشخصه عدد صحیح عبارات ابهام ساده شود. بنابراین، عبارات اختلاف تک در معادله مشاهده DD باقی می مانند. تشکیل مشاهدات فاز حامل DD بین کاربران و ماهواره ها منمنو j�، معادله مشاهده گلوناس می شود
در معادلات، اپراتور ∆-تفاوت تک-ICB برای دو گیرنده روی شبه برد GLONASS و مشاهده فاز حامل (متر).
اکثر مطالعات نشان می دهد که گیرنده های یکسان دارای ICB تقریبا یکسان هستند. در نتیجه، ICB ها را می توان با یک تفاوت واحد بین ماهواره ها حذف کرد [ 28 ]. با این حال، ICBها باید قبل از AR GLONASS برای موقعیت نسبی با انواع مختلف گیرنده کالیبره شوند [ 29 ].
در این مطالعه، ما فقط بر روی خط پایه کوتاه برد تمرکز می کنیم و بیشتر تاخیر یونوسفر و تاخیر تروپوسفر را می توان با DD حذف کرد. در نتیجه، معادلات (1) و (2) را می توان به صورت بازنویسی کرد
شکل کلی معادله مشاهدات خطی در مشاهدات فاز حامل GNSS را می توان دوباره به صورت [ 3 ] بیان کرد.
جایی که L�بردار مشاهده DD را نشان می دهد، ننبردار ابهام عدد صحیح فاز حامل DD است ( ن∈زn)ن∈ز�)، ایکسایکسبردار سایر پارامترهای مجهول (از جمله مختصات موقعیت) است. ε�خطاهای تصادفی و ماتریس است آآو ببماتریس های طراحی مربوطه هستند. توجه داشته باشید که ما در این مقاله فقط از مشاهده فاز حامل برای تخمین حل شناور مریخ نورد استفاده می کنیم. روش شناسی دقیق در بخش بعدی معرفی خواهد شد.
حل معادله (7) را می توان با کمینه کردن معادله (8) به دست آورد:
جایی که | | ∗ | |2سL=( ∗ )تیسL– 1( ∗ )||∗||س�2=(∗)تیس�–1(∗)و سLس�ماتریس واریانس کوواریانس (VC) بردار مشاهده است L�.
به طور کلی راه حل ثابت را می توان به سه مرحله تقسیم کرد. در مرحله اول، محدودیت های عدد صحیح در ابهامات به سادگی نادیده گرفته می شوند. راه حل حداقل مربعات نامحدود را حل شناور می گویند ن^ن^، ایکس^ایکس^و ماتریس واریانس کوواریانس مربوطه، به شرح زیر است
در مرحله دوم، تخمین ابهام عدد صحیح ن˘ن˘از ابهام “شناور” محاسبه می شود، مشروط به دقیقه|∣∣ن^–ن˘∣∣|2سن^دقیقه||ن^–ن˘||سن^2. این را می توان با استفاده از روش LAMBDA به طور موثر انجام داد. در نهایت یک راه حل ثابت به دست می آید
3. وضوح ابهام تک دوره ای GNSS
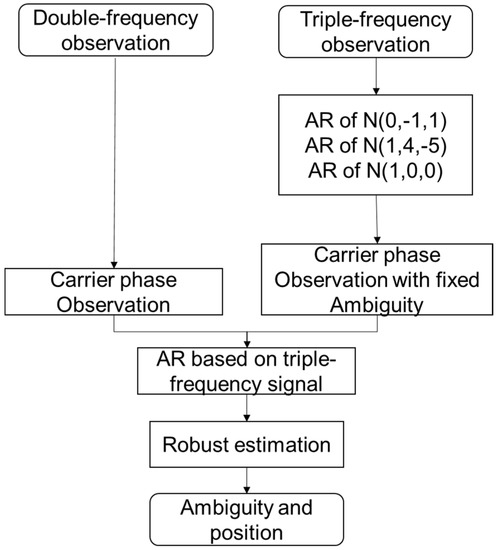
AR تک دوره ای یک چالش مداوم برای باندهای فرکانس دوگانه GNSS بوده است، حتی تحت یک خط پایه کوتاه برد. خوشبختانه، سیگنالهای سهگانه یا حتی چند فرکانس، ترکیبی از خط فوقالعاده و خط عریض را تشکیل میدهند، که ابهامات آنها را میتوان بر اساس طول موج نسبتاً بزرگ، به راحتی برطرف کرد. BDS در حال حاضر یک سیستم منحصر به فرد است که سیگنال های فرکانس سه گانه را ارائه می دهد. با این حال، ماهواره های BDS قابل مشاهده ممکن است برای تخمین موقعیت مریخ نورد در یک شهر پرمصرف کافی نباشند. وضعیت دیگر این است که هندسه صورت فلکی ماهوارههای فرکانس سهگانه ممکن است به اندازه کافی قوی نباشد تا موقعیت دقیقی به دست آورد. به عنوان مثال، اگر همه ماهواره های BDS قابل مشاهده، ماهواره های GEO باشند، هندسه صورت فلکی برای محاسبه موقعیت دقیق بسیار ضعیف خواهد بود. برای رفع ابهامات سیگنالهای GNSS و ارائه یک سرویس موقعیتیابی و ناوبری برای مریخنورد در زمان کوتاه، یک روش جدید تک دورهای GNSS AR برای خط پایه کوتاه برد بر اساس سیگنالهای فرکانس سهگانه در این مطالعه توسعه داده شده است. تئوری و مراحل این روش عبارتند از (شکل 1 ) به شرح زیر است:
مرحله 1. به عنوان اولین سیستم عملیاتی با باندهای فرکانس سه گانه، می توان ابهامات سیگنال های BDS را سریعتر از سایر سیگنال های GNSS برطرف کرد. در مرحله اول، ابهامات سیگنال های BDS EWL (خط عریض) و B1 را برطرف می کنیم. روش تفصیلی در بخش 3.1 معرفی شده است .
مرحله 2. پس از ابهامات سیگنال های BDS، حل شناور را با استفاده از رصد فاز حامل BDS (B1) با ابهام ثابت و مشاهده فاز حامل دیگر ماهواره ها (L1) تخمین می زنیم. این مرحله به تفصیل در بخش 3.2 مورد بحث قرار گرفته است .
مرحله 3. در نهایت، برای تحقق AR قابل اعتماد برای مشاهده فاز حامل GNSS، برآورد قوی درگیر است ( بخش 3.3 ).
3.1. وضوح ابهام سیگنال های سه فرکانس BDS
با فرض وجود سه فرکانس فاز حامل f1، f2، f3، شکل کلی معادلات مشاهده خطی برای ترکیب مشاهده شبه برد GNSS و فاز حامل را می توان به صورت معادلات (11) و (12) (واحد: متر) بیان کرد. اگرچه بیشتر اثرات جوی در مشاهده فاز کد و حامل را می توان با DD لغو کرد، ترکیب خطی ممکن است این اثرات را افزایش دهد. بنابراین، تأخیر تروپوسفر و تأخیر یونوسفر هنوز در معادله ترکیب مشاهده زیر وجود دارد.
جایی که
جایی که ∇ Δϕ( من ، ج ، ک )∇∆�(من،�،ک)و ∇ Δپ( m , n , l )∇∆پ(متر،�،ل)فاز حامل DD و ترکیب مشاهده شبه برد به ترتیب بر حسب متر هستند. من ، ج ، کمن،�،کضرایب ترکیبی هستند که اعداد صحیح هستند. m ، n ، lمتر،�،لضرایب ترکیبی مربوطه هستند که اعداد واقعی هستند. ابهام متناظر، فرکانس مجازی و طول موج ترکیب است
ججنشان دهنده سرعت نور است. λمن�منو نمننمنطول موج و ابهامات مشاهده هر فاز حامل را نشان می دهد.
ضریب تاخیر یونوسفر ترکیبی است
نویز مشاهده ترکیبی DD است
به دلیل طول موج زیاد، ابهام خط فوق العاده عریض از ∇ Δن( 0 , 1 , − 1 )∇∆ن(0،1،–1)، ∇ Δن( 1 , 4 , – 5 )∇∆ن(1،4،–5)را می توان با استفاده از آن ثابت کرد (به عنوان مثال خط فوق العاده گسترده BDS را در نظر بگیرید)
که در آن [] عملگر گرد کردن را نشان می دهد.
انحراف معیار ابهامات برآورد شده باید باشد
با فرض اینکه کد فرکانس سه گانه و مشاهدات فاز حامل دارای انحراف استاندارد یکسان (STD) هستند.
تحت شرایط یک خط پایه کوتاه برد، می توانیم خطای یونوسفر DD را تنظیم کنیم ( Δ ∇ I∆∇مندر رابطه (23) 10 سانتی متر [ 30 ] باشد . با توجه به انتشار خطا، انحراف معیار ابهام برآورد شده به ترتیب 0.148 چرخه و 0.172 چرخه است. در نتیجه، ابهامات نسبتاً قابل اعتماد خطوط فوق عریض را می توان با استفاده از روش گرد کردن در یک دوره واحد برطرف کرد.
بعد از AR خط فوق عریض، می توانیم استفاده کنیم ∇ Δϕ( 0 , 1 , − 1 )∇∆�(0،1،–1)و ∇ Δϕ( 1 , 0 , 0 )∇∆�(1،0،0)برای رفع ابهام ∇ Δن( 1 , 0 , 0 )∇∆ن(1،0،0). با این حال، این ترکیب نویز مشاهده و باقیمانده تاخیر یونوسفر را تقویت می کند، که به طور قابل توجهی بر وضوح ابهام تأثیر می گذارد. برای غلبه بر این مسائل، ما انتخاب کردیم ∇ Δϕ( 1 , − 1 , 0 )∇∆�(1،–1،0); ابهام آن را می توان به صورت محاسبه کرد ∇ Δن( 1 , − 1 , 0 )= − 5 ∇ Δن( 0 , 1 , − 1 )+ ∇ Δن( 1 , 4 , – 5 )∇∆ن(1،–1،0)=–5∇∆ن(0،1،–1)+∇∆ن(1،4،–5). بنابراین، ما داریم
سپس، ابهام را می توان به صورت بیان کرد
جایی که ∇ Δϕ( 1 , − 1 , 0 )∇∆�(1،–1،0)و ∇ Δϕ( 1 , 0 , 0 )∇∆�(1،0،0)مشاهده فاز حامل DD از دو ترکیب خط عریض بر حسب متر هستند، Δ ∇δt r o p∆∇�تی��پتاخیر تروپوسفر DD است، Δ ∇ Kf21∆∇ک�12تاخیر یونوسفر است و β�، λ�، Δ ∇ N∆∇ن، و Δ ∇ ε∆∇�تابع نگاشت، طول موج، ابهام DD و نویز مشاهده دو ترکیب خط عریض به ترتیب هستند.
در این ترکیب، انحراف معیار ابهام تخمین زده شده تنها 0.209 چرخه است. بنابراین، میزان موفقیت AR از ∇ Δϕ( 1 , 0 , 0 )∇∆�(1،0،0)از نظر تئوری نیز بسیار بالا است.
3.2. وضوح ابهام GNSS تحت محدودیت مشاهده با فرکانس سه گانه BDS
حال، ابهامات مشاهده GNSS را به دو دسته طبقه بندی می کنیم. یکی ابهام است ( ∇ Δنه∇∆نه) از سیگنال سه فرکانس BDS که در قسمت آخر حل شد. مورد دیگر ابهام است ( ∇ Δنساعت∇∆نساعت) از دیگر ماهواره های GNSS مشاهده دو فرکانس، که حل آن نسبتا دشوار است. معادله خطای مشاهده GNSS را می توان به صورت زیر بیان کرد:
V 1 و V 2 به ترتیب باقیمانده مشاهدات BDS و GNSS هستند. ایکس“ایکس“بردار پارامترهای مجهول مختصات است. ∇ Δنه∇∆نهو ∇ Δنساعت∇∆نساعتابهامات مشاهدات BDS B1 و سایر مشاهدات GNSS L1 هستند. L 1 , L 2 به ترتیب مشاهده فاز حامل BDS ( B 1 ) و مشاهدات GNSS ( L 1 ) هستند. A 1 , A 2 و C 1 , C 2 ماتریس های ضریب متناظر هستند. به طور کلی، معادله (28) را می توان ساده کرد
جایی که Vک�کماتریس باقیمانده های مشاهده است و آکآکماتریس ضریب پارامترها است. سپس، راه حل حداقل مربعات است
در معادله (28)، ما ابهام BDS را درگیر می کنیم، که می تواند راحت تر از سیگنال های فرکانس دوگانه GNSS رفع شود. سپس قسمت اول این معادله عاری از اثر ابهام است که محدودیت این مدل است و باعث افزایش کارایی AR مشاهده فاز حامل GNSS خواهد شد.
3.3. وضوح ابهام تک دوره ای GNSS بر اساس برآورد قوی
الگوریتم ذکر شده در بالا می تواند AR تک دوره ای GNSS را در یک خط پایه با برد کوتاه به دست آورد. با این حال، میزان موفقیت AR مشاهده فاز حامل BDS 100٪ نیست. رفع ابهام نادرست مطمئناً باعث ایجاد خطا در تأخیر تروپوسفری می شود که برای محدود کردن معادله مشاهده GPS/GLONASS استفاده می شود. علاوه بر این، اجتناب از تأثیر خطای مشاهدهای فاحش بر پردازش دادهها دشوار است. در این تحقیق برای غلبه بر مسائل ذکر شده در بالا، از یک تخمین قوی استفاده شده است. اثر این خطاها با استفاده از وزن معقول رد می شود.
با توجه به تئوری برآورد قوی، برآورد M است
جایی که پ¯پ¯نشان دهنده ماتریس وزن برابر است. توابع وزن برابر متداول شامل تابع وزن هوبر، تابع وزن همپل و تابع توکی است. با توجه به تجزیه و تحلیل تجربی، ما تابع وزن IGG (مؤسسه ژئودزی و ژئوفیزیک) را انتخاب می کنیم [ 28 ]:
در این مرحله دو موضوع کلیدی باید حل شود [ 31 ]. اولی تعریف از ک0ک0و ک1ک1; دوم انتخاب وزن است. بطور کلی، ک0ک0و ک1ک1به عنوان ثابت تنظیم می شوند، به عنوان مثال، ک0∈ [ 1.0 ~ 1.5 ]ک0∈[1.0~1.5]، ک1∈ [ 3.0 ~ 8.0 ]ک1∈[3.0~8.0]. اگر معادله قوی ماتریس پارامتر و فضای مشاهده را در نظر بگیریم، مقدار میانگین تعداد مشاهدات اضافی برابر است با ( n – m ) / n–––––––––√(�–متر)/�; n و m به ترتیب تعداد مشاهدات و پارامترها هستند. در نتیجه، ارزش ک0ک0و ک1ک1باید باشد ک0=ک0“⋅ کک0=ک0“·کو ک1=ک1“⋅ کک1=ک1“·ک، جایی که ک0“∈ [ 1.0 ~ 1.5 ]ک0“∈[1.0~1.5]، ک1“∈ [ 3.0 ~ 8.0 ]ک1“∈[3.0~8.0]، و k =n / ( n – m )–––––––––√ک=�/(�–متر). این ابتکارات باعث انتخاب ک0ک0و ک1ک1با n و m مختلف تغییر می کند و انعطاف پذیری تخمین قوی را افزایش می دهد. به طور کلی، تخمین معادله (32) معمولاً شامل روش تکراری است. راه حل تکراری مرحله t + 1 باید باشد
4. آزمایش ها و بحث
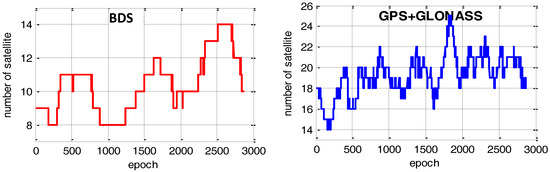
برای آزمایش عملکرد روش جدید AR تک دوره ای GNSS، داده های واقعی GPS/GLONASS/BDS دو ایستگاه (Sta1 و Sta2) به مدت 24 ساعت در 3 مارس 2014 جمع آوری شد. طول خط مبنا بین ایستگاه ها 9.5 متر بود. فاصله مشاهده 30 ثانیه بود. علاوه بر این، موقعیت دو ایستگاه دقیقا مشخص است. در این بخش، ابتدا ابهام سیگنالهای فرکانس سهگانه BDS را برطرف میکنیم و سپس با استفاده از روش پیشنهادی در این مقاله، AR سیگنالهای GPS/GLONASS را متوجه میشویم. شکل 2 تعداد ماهواره های قابل مشاهده BDS و GPS/GLONASS را نشان می دهد. از شکل 2، می بینیم که 8-14 ماهواره BDS قابل مشاهده در دوره آزمایشی وجود دارد. برای سیستم ترکیبی GPS و GLONASS، بیش از 14 ماهواره را می توان در پردازش داده استفاده کرد.
4.1. وضوح ابهام سیگنال های سه فرکانس BDS
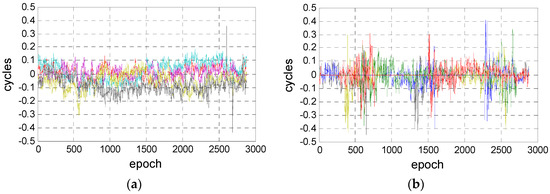
با توجه به طول موج زیاد، می توانیم ابهام ترکیب خطوط فوق عریض را به راحتی برطرف کنیم. در این تحقیق، ابهام مشاهده فاز حامل BDS DD بر اساس رابطه (25) ثابت شده است. به طور کلی، ابهام برآورد شده زمانی قابل اعتمادتر است که تفاوت بین ابهام شناور و عدد صحیح کوچکتر باشد. شکل 3توزیع تفاوت (DF) بین ابهام شناور و عدد صحیح مدار زمین ثابت (GEO)، مدار زمین سنکرون شیبدار ماهواره (IGSO) و مدار زمین متوسط (MEO) را نشان می دهد. از این شکل، میتوان دید که بیش از 98 درصد از DF ماهوارههای GEO در محدوده سیکلهای 0.2- تا -0.1 شناور است. در نتیجه، استفاده از روش گرد کردن برای رفع ابهام مشاهدات GEO به اندازه کافی قابل اعتماد است. برای ماهواره های IGSO و MEO، DF عمدتاً در حدود 0.3± متغیر است. با این حال، برخی از DF تقریبا به 0.5 سیکل می رسد. در این مورد، استفاده از روش گرد کردن منجر به رفع اشتباه می شود. قابلیت اطمینان تفکیک ابهام نسبتاً کم خواهد بود.
به طور کلی، تفاوت بین ابهام شناور و عدد صحیح با تاخیر یونوسفر و نویز مشاهده فاز حامل DD تعیین می شود. این تفاوت GEOها کوچکتر از IGSOها است و MEOها به این معنی است که نویز مشاهده فاز حامل GEO کمتر از سایر انواع ماهواره است. نتایج مشابهی نیز در مقاله نشان داده شده است [ 32 ]، که نشان میدهد که دامنههای سری زمانی بدون یونوسفر و هندسه GEOs کوچکتر از اندازهگیری فاز حامل IGSOs و MEOs است.
برای تأیید ابهام در هر دوره، ما ابهام را در ترکیب بدون یونوسفر DD قرار داده و آن را به صورت ساده می کنیم.
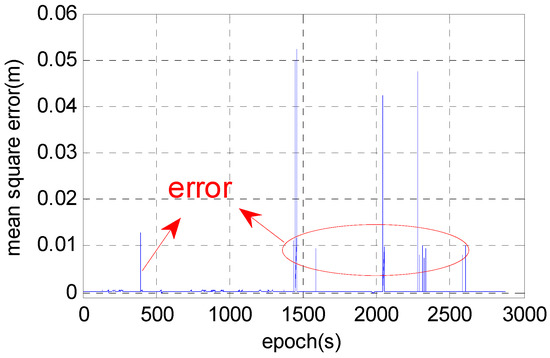
پارامتر ناشناخته ایکس^ایکس^اینجا شامل تصحیح مختصات مجهول می شود δ x�ایکس، δ y��، δ z��، تاخیر تروپوسفر اوج و ابهام. بر اساس برآورد حداقل مربعات، می توانیم دقت پارامتر مجهول را با میانگین مربع خطای σ اندازه گیری کنیم (معادله (34)).
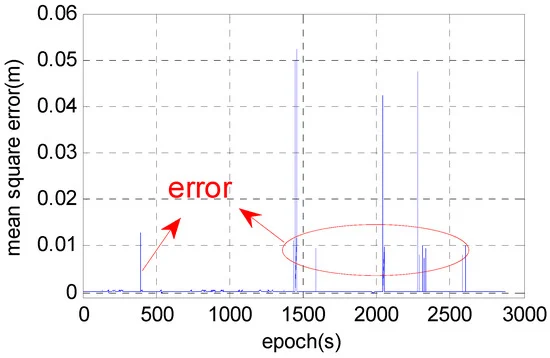
در این معادله، n�تعداد مشاهدات در هر دوره را نشان می دهد و تیتیتعداد مشاهدات لازم است. شکل 4 تغییر قدر مطلق میانگین مربعات خطا را در هر دوره نشان می دهد. نویز اندازه گیری ترکیب بدون یونوسفر بیشترین خطا را در رابطه (34) ایجاد می کند. به طور کلی، نویز اندازه گیری فاز حامل 2± میلی متر است. با توجه به قانون انتشار خطا، نویز اندازه گیری ترکیب بدون یونوسفر باید 1.2 ± میلی متر و خطای حدی باید 3.8 میلی متر (3 برابر سیگما) باشد. از شکل 4می بینیم که میانگین مربعات خطای برخی از دوره ها فراتر از 10 میلی متر و حداکثر به 53 میلی متر می رسد. واضح است که عدد صحیح AR در این دوره ها اشتباه است. دلایل اصلی این است که (1) تثبیت نادرست در AR از خط فوق العاده عریض و (2) نویز اندازه گیری و باقیمانده تاخیر یونوسفر بر AR مشاهده فاز حامل BDS تأثیر می گذارد.
4.2. وضوح ابهام سیگنال های GPS/GLONASS
در این بخش، ابهام سیگنالهای GPS/GLONASS را بر اساس مشاهده فاز حامل فرکانس سهگانه BDS با ابهام شناخته شده برطرف میکنیم. برای آزمایش عملکرد روش جدید ارائه شده در این مطالعه، داده ها را با استفاده از سه طرح پردازش می کنیم. اولین مورد (S1) از روش جدید برای به دست آوردن موقعیت مریخ نورد استفاده می کند. دوم (S2) شامل برآورد قوی است. و سومین (S3) استفاده ترکیبی از تمام سیستم های ابزار (GPS/GLONASS/BDS) با سه مرحله ذکر شده در بخش 2 است . قبل از پردازش داده ها، لغزش های چرخه شناسایی و تعمیر شدند. در این قسمت با مقایسه مختصات تخمین زده شده با مختصات دقیق ابهام را بررسی می کنیم. نرخ رفع ابهام (AFR) [ 33] برای کمی کردن عملکرد کارایی AR با تعریف زیر اعمال شد:
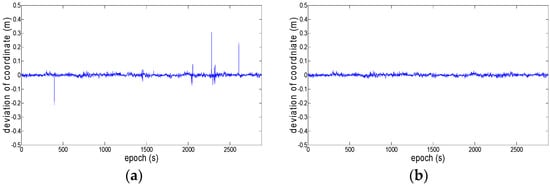
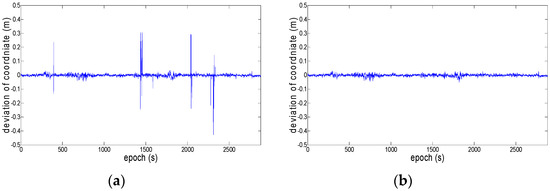
شکل 5 ، شکل 6 و شکل 7 انحراف مختصات را در جهت های N، E و U دو طرح اول نشان می دهد. شکل a ( شکل 5 الف، شکل 6 الف و شکل 7 الف) نتیجه برآورد حداقل مربعات را نشان می دهد، و شکل ب ( شکل 5 ب، شکل 6 ب و شکل 7 ب) نتیجه تخمین قوی را نشان می دهد. از این ارقام، میتوان دریافت که برخی از دورهها در صورت استفاده مستقیم از تخمین حداقل مربعات، یک افست بزرگ در سه جهت ایجاد میکنند. برخی از انحرافات حتی به 1 متر می رسد. با مراجعه به شکل 3، که وضوح ابهام حامل-فاز BDS را نشان می دهد، متوجه می شویم که دوره هایی با انحراف مختصات بزرگ نیز دارای میانگین مربع خطای BDS بزرگ هستند. بنابراین، ابهام اشتباه BDS منجر به جبران مدل GPS/GLONASS AR خواهد شد. بنابراین، میتوانیم ماهوارههای BDS را با ابهام صحیح انتخاب کنیم تا محاسبه ابهام GPS/GLONASS را محدود کنیم. با این حال، بهدلیل نویز اندازهگیری و سایر عوامل نامشخص، بهدست آوردن 100% ابهام فرکانس سهگانه BDS دشوار است. برای غلبه بر این مسائل، از تخمین قوی در طرح دوم استفاده می کنیم. شکل b ( شکل 5 ب، شکل 6 ب و شکل 7 ب) نشان می دهد که انحراف مختصات در جهت های N، E، و U آشکارا کوچکتر از شکل a است ( شکل 5) .الف، شکل 6 الف و شکل 7 الف). بر اساس برآورد قوی، وزن مشاهدات با نقاط پرت یا ابهامات نادرست به طور قابل توجهی کاهش می یابد و مختصات دقیق نسبتا بالایی به دست می آید. جدول 1 توزیع انحراف مختصات را شرح می دهد. 100% انحراف مختصات طرح دوم شناور در محدوده 5± سانتی متر. می توان در نظر گرفت که تمامی ابهامات GPS/GLONASS به درستی برطرف شده است.
جدول 2 AFR S1 و S3 را نشان می دهد. همانطور که در این جدول نشان داده شده است، با استفاده از روش جدید ارائه شده در این مقاله میتوانیم ابهام را در یک دوره برطرف کنیم. با این حال، پنج دوره برای انجام AR با S3 مورد نیاز است.
یک محدودیت برای روش پیشنهادی در این مقاله وجود دارد. این روش اثر تاخیر یونوسفر و تروپوسفر را نادیده می گیرد و به خط پایه کوتاه برد محدود می شود. در مقاله دیگری، ما یک روش جدید برای رفع ابهام GPS/BDS برای خط پایه دوربرد توسعه دادیم [ 26 ].
5. نتیجه گیری ها
توسعه GPS، BDS، GLONASS و Galileo دوره جدیدی را برای جامعه GNSS ما نشان میدهد. نحوه استفاده از سیگنال های چند فرکانس و چند صورت فلکی برای بهبود در دسترس بودن، قابلیت اطمینان و دقت سرویس ناوبری و موقعیت یابی GNSS به یک مرکز تحقیقاتی تبدیل شده است. این مطالعه بر تحقیق استفاده کامل از هر سیستم و بهبود کارایی تفکیک ابهام تمرکز دارد. یک روش جدید تک دوره ای GNSS AR برای خط پایه کوتاه برد بر اساس سیگنال های فرکانس سه گانه در این مطالعه توسعه داده شده است. برای آزمایش عملکرد تکنیک جدید، داده های واقعی GPS/GLONASS/BDS پردازش می شوند. از بحث های بالا می توان به نتایج زیر دست یافت:
(1) سیگنال های سه یا چند فرکانس می توانند یک ترکیب خطی EWL و WL (Wide Lane) را تشکیل دهند. ابهامات آنها را می توان خیلی راحت تر برطرف کرد. نتایج آزمون نشان میدهد که AR مشاهدات GEOs با گرد کردن ابهامات شناور به اعداد صحیح، قابل اعتمادتر از مشاهدات MEO و IGSOs است.
(2) استفاده از مشاهدات فاز حامل BDS با ابهام شناخته شده برای محاسبه اطلاعات قبلی نه تنها قابلیت اطمینان معادله مشاهده GNSS را افزایش می دهد، بلکه کارایی AR سیگنال های فرکانس دوگانه GNSS را نیز به طور قابل توجهی افزایش می دهد.
(3) حداقل مربعات با تخمین قوی می توانند به طور موثر در برابر اثر باقیمانده ناشی از ابهام BDS ثابت مقاومت کنند.
در نتیجه، روش جدید می تواند GNSS AR تک دوره ای را برای یک خط پایه با برد کوتاه بر اساس سیگنال های فرکانس سه گانه تحقق بخشد.
این روش بر اساس سیگنال های فرکانس سه گانه است. توجه داشته باشید که 20 ماهواره BDS در حال حاضر فعال هستند: 6 GEOs، 8 IGSO و 6 MEO. صورت فلکی کامل قرار است از 35 ماهواره تشکیل شود. طبق برنامه ریزی کلی آن، یک سیستم ماهواره ای ناوبری BDS با پوشش جهانی تا سال 2020 راه اندازی خواهد شد. در نتیجه، مشتریان در منطقه آسیا و اقیانوسیه می توانند از این روش در حال حاضر استفاده کنند و تا سال 2020 برای کاربران جهانی در دسترس خواهد بود.





بدون نظر