1. معرفی
عمق سنجی نزدیک به ساحل یکی از مهم ترین پارامترها برای بررسی فرآیندهای ساحلی و مدل های هیدرودینامیکی در مناطق ساحلی است. به این ترتیب، توانایی استخراج عمق سنجی نزدیک به ساحل با استفاده از تکنیک های سنجش از دور موضوعی است که در نظارت و تحقیقات ساحلی مورد توجه فزاینده است. ماهیت بسیار پویا مناطق نزدیک به ساحل منجر به تغییرات مکرر در آبسنجی میشود که لازم است در فواصل زمانی دورهای پایش شود، و از این رو، بررسی باید به طور مکرر انجام شود، که تقریباً عملی نیست. سنجش از دور جایگزینی برای تخمین عمق سنجی نزدیک به ساحل در نظر گرفته می شود زیرا تعداد زیادی از داده های ماهواره ای چند صورت فلکی، چند طیفی و چند فضایی به عنوان داده باز موجود است. از این رو، عمق سنجی نزدیک به ساحل بر اساس سنجش از دور نوری به یک جایگزین مقرون به صرفه برای پیمایش های ناوبری و محدوده صدا (SoNAR) و تشخیص نور و محدوده (LiDAR) تبدیل شده است. به منظور تکمیل رویکردهای مبتنی بر میدان، چندین روش سنجش از دور نوری پیشنهاد شده است.1 ، 2 ، 3 ، 4 ، 5 ].
مدلهای Bathymetry مشتق از ماهواره (SDB) برای بازیابی انعکاس کف دریای ساحلی از تصاویر ماهوارهای و به طور موثر از این اطلاعات برای تولید عمقسنجی ساحلی استفاده شدهاند. محققان الگوریتمهای SDB را در 30 سال گذشته بررسی کردهاند و روشهای تخمینی را پیشنهاد کردهاند که در دستههایی مانند سهمیهبندی طیفی [ 1 ، 6 ] و مدلهای انتقال تابشی [ 7 ، 8 ، 9 ] قرار میگیرند. در صورت انتقال تابشی، مدلهای تک باند طیفی و باند چند طیفی پیشنهاد شدهاند. الگوریتم های تک باند یک ضریب تضعیف ثابت و نوع پایین همگن را فرض می کنند [ 8 ، 10 ، 11]. SDB قابل اعتماد زمانی امکان پذیر است که آب شفاف باشد و کیفیت آب و انواع کف همگن باشند. هنگامی که چنین شرایطی برآورده می شود، مدل های عمق آب تک باند می توانند تخمین معقولی از عمق ارائه دهند. با این وجود، محیط های آبی ساحلی به ندرت چنین شرایط ایده آلی را ارائه می دهند. بنابراین، مدلهای انتقال تشعشعی با استفاده از رگرسیون خطی باندهای چند طیفی [ 7 ، 9 ، 12 ] نتایج خوبی به همراه داشتهاند.
به منظور بهبود کارایی مدل های چند طیفی در برآورد SDB، بسیاری از رویکردهای آماری اتخاذ شده است [ 13 ]. اخیراً، مدل رگرسیون وزندار جغرافیایی (GWR) با موفقیت به عنوان یک مدل رگرسیون خطی وزندار پیشبینیکننده [ 14 ، 15 ، 16 ، 17 ، 18 ] در زمینههای مختلف استفاده شده است. علاوه بر این، [ 19 ، 20] با موفقیت از یک مدل GWR برای تخمین بهبود یافته SDB استفاده کرده اند. با این حال، تا کنون، هیچ ماژول نرم افزاری برای خودکارسازی رویه های SDB که از مدل GWR استفاده می کنند، پیشنهاد نشده است. بنابراین، ما یک ماژول سیستم پشتیبانی سیستم اطلاعات جغرافیایی (GIS) تجزیه و تحلیل منابع جغرافیایی منبع باز جدید (GRASS) با نام i.image.bathymetry را برای خودکار کردن تخمین عمق سنجی از تصاویر چند طیفی پیاده سازی کرده ایم. از آنجایی که i.image.bathymetryبه طور کامل با استفاده از یک چارچوب رایگان و متن باز GIS پیاده سازی شده است، می توان آن را به راحتی در سایر زمینه ها بدون نیاز به سرمایه گذاری منابع برای نرم افزار اعمال کرد و همچنین می تواند در آینده بهبود بیشتری یابد. هدف مطالعه بیشتر ایجاد یک مدل امداد ساحلی یکپارچه (ICRM) با ترکیب داده های توپوگرافی و عمق سنجی با وضوح چندگانه است. ICRM برای ارزیابی یک سناریوی کاربردی عملی SDB در شبیهسازی سونامی استفاده میشود.
2. محیط سیستم
ماژول i.image.bathymetry برای تخمین SDB در GRASS GIS نسخه 7 [ 21 ] توسعه یافته است . GRASS GIS یک GIS منبع باز قوی است که به طور گسترده در دانشگاه ها، محیط های تجاری و سازمان های دولتی استفاده می شود. یکی از ویژگی های قدرتمند GRASS در دسترس بودن کتابخانه اسکریپت نویسی پایتون است که برای پیاده سازی چندین ماژول قابل تنظیم برای پردازش جغرافیایی استفاده می شود. علاوه بر این، GRASS GIS همچنین دسترسی به پروژه R برای محاسبات آماری (R) را از طریق بستههای متعدد برای تحلیلهای مکانی و زمینآماری فراهم میکند. در دسترس بودن بسته rgrass7 به عنوان رابط بین GRASS و R یکی از دلایل انتخاب GRASS GIS برای اجرای i.image.bathymetry است.. اثربخشی GRASS GIS در تجزیه و تحلیل دادههای بزرگ، سهولت آن در پیادهسازی ماژولهای پایتون، و استقرار پلت فرم محاسبات موازی نیز در نظر گرفته شد.
2.1. کتابخانه برنامه نویسی پایتون GRASS
Python [ 22 ]، یک زبان برنامه نویسی پرکاربرد، یک محیط برنامه نویسی قدرتمند در GRASS GIS فراهم می کند. این به کاربران امکان می دهد تا به طور موثر از قابلیت های نرم افزار GRASS GIS برای توسعه ماژول ها و افزونه های جدید استفاده کنند. در این مطالعه، کتابخانه برنامه نویسی GRASS Python [ 23 ] برای ترکیب چندین ماژول و توابع از GRASS و R برای پیاده سازی الگوریتم SDB استفاده شده است.
2.2. بسته های R
R [ 24 ] یک محیط محاسباتی آماری منبع باز است که چندین بسته و توابع تحلیل فضایی را ارائه می دهد. rgrass7 [ 25 ] یک رابط بین GRASS GIS 7 و R فراهم می کند. بسته دسترسی به تمام دستورات GRASS را از خط فرمان R فراهم می کند. بسته rgrass7 می تواند برای وارد کردن/صادرات داده ها از GRASS به R و بالعکس استفاده شود. بسته rgrass7 فقط فراتر از R نسخه 3.1 موجود است. بنابراین، برای استفاده از ماژول i.image.bathymetry باید نصب شود . کتابخانه دیگری، data.table، برای مدیریت چارچوب داده های مکانی داده های شطرنجی در R. GWmodel [ 26] استفاده می شود.] مجموعه ای از توابع است که شاخه خاصی از آمار فضایی به نام مدل های وزنی جغرافیایی در نظر گرفته می شود و برای استقرار عملکرد GWR استفاده می شود.
3. پیاده سازی مدل SDB به عنوان ماژول GRASS GIS
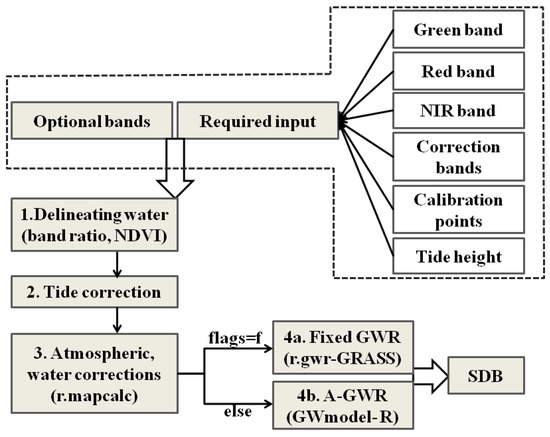
i.image.bathymetry مجموعه ای از بسیاری از ماژول های GRASS GIS و R موجود و توابع جدید است . عملکردهای اصلی ماژول عبارتند از (1) تعیین منطقه آب. (2) اصلاحات جوی و آب؛ (3) GWR. یک الگوریتم تصحیح اتمسفر و آب از نویسندگان قبلی اتخاذ شد و بهبودهایی از نظر انتخاب باند انجام شده است [ 9 ، 12 ]. باندهای طیفی اصلاح شده هندسی و رادیومتری هر داده سنجش از دور چند طیفی نوری را می توان برای تخمین SDB از منطقه ساحلی مناسب استفاده کرد. در فلوچارت ( شکل 1، کادر نقطه چین باندهای طیفی مورد نیاز، باندهای طیفی اختیاری و سایر داده های ورودی مانند نقاط عمق کالیبراسیون (به عنوان نوع نقطه برداری) و ارتفاع جزر و مد را نشان می دهد. باندهای طیفی در طول موج های سبز، قرمز، مادون قرمز نزدیک (NIR) و مادون قرمز موج کوتاه (SWIR) ورودی های اجباری هستند. سایر باندهای طیفی موجود در حوزه مرئی می توانند بسته به سنسور ماهواره به عنوان باندهای اضافی تکمیل شوند.
3.1. ترسیم منطقه آب
اولین مرحله در زنجیره پردازش i.image.bathymetry ترسیم منطقه آب است. یک ترکیب مبتنی بر قانون از شاخص گیاهی تفاوت نرمال شده (NDVI) و یک نسبت نواری بین نوارهای سبز و مادون قرمز برای ترسیم موثر استفاده شد. نسبت نواری بزرگتر یا مساوی 1 به عنوان آب و کمتر از 1 به عنوان زمین طبقه بندی شد [ 11 ]. یک منطقه آبی پوشانده شده برای پردازش بیشتر استفاده شده است. NDVI برای حذف ابر، یخ و غیره از منطقه آب استفاده شده است. ماژول GRASS GIS r.mapcalc برای این محاسبات استفاده می شود تا پیکسل های آب را به طور موثر ترسیم کند (مرحله 1 در شکل 1 ).
3.2. اصلاح جزر و مد
علیرغم در دسترس بودن تصاویر ماهواره ای متعدد، به ندرت تصاویر ماهواره ای در زمان جزر و مد صفر بدست می آید. بنابراین، ماژول i.image.bathymetry دارای گزینه ای برای ارائه ارتفاع جزر و مد مخصوص زمان ثبت تصاویر ماهواره ای و انجام اصلاح جزر و مد (مرحله 2 در شکل 1) است.). ارتفاع جزر و مد در زمان گرفتن تصویر را می توان برای تصحیح عمق کالیبراسیون تهیه کرد و از آن استفاده کرد. اگر جزر و مد در زمان دریافت تصویر ماهواره ای کمتر از صفر باشد، می توان مقدار منفی را به عنوان ارتفاع جزر و مد ارائه کرد. مقدار ارتفاع جزر و مد ارائهشده توسط کاربر به عمق کالیبراسیون افزایش مییابد، و از این رو، ارتفاع جزر و مد در زمان گرفتن تصویر و عمق کالیبراسیون همگامسازی میشوند. این گزینه همچنین می تواند زمانی استفاده شود که از همان عمق کالیبراسیون در تخمین SDB چند زمانی استفاده شود.
3.3. اصلاحات جوی و آب
تشعشع مشاهده شده توسط یک سنسور ماهواره ای بر روی آب کم عمق اساساً شامل چهار جزء است، یعنی پراکندگی اتمسفر، انعکاس سطحی، پراکندگی حجم در آب، و اجزای بازتاب پایین [20 ] . بسیاری از نویسندگان الگوریتم های مختلفی را برای اصلاحات جوی و آب پیشنهاد کرده اند [ 6 ، 8 ، 10 ]. در میان آنها، برخی از نویسندگان [ 12 ] پیشنهاد کرده اند که اصلاح جوی قبل از اصلاحات آب انجام شود. با این وجود، این مطالعه روش تصفیهشدهتری را برای بازیابی بازتاب پایینی که در اصل توسط [ 9 ] با حذف اجزای اتمسفر، سطح آب و ستون آب پیشنهاد شده بود، اتخاذ کرد. تابش طیفی مشاهده شده L (λ ) تابعی از طول موج است و می توان آن را به شکل زیر بیان کرد.
که در آن V ( λ ) پراکندگی حجم در آب، B ( λ ) بازتاب پایین، S ( λ ) بازتاب سطح آب و A ( λ ) پراکندگی اتمسفر است [ 20 ].
در اعماق آب، حتی یک باند طول موج کوتاه دارای مولفه بازتابی پایینی نیست و میتوان آن را مطابق با پیکسلهایی با عمق بینهایت در نظر گرفت ( L ( λ∞ ) i). هدف مورد علاقه در SDB ناحیه آب کم عمق است که دارای بازتاب پایین است که می تواند به عمق تبدیل شود. ترسیم پیکسلهای آب عمیق با تفسیر بصری نسبتاً ساده است، اما در این مورد، از نقاط عمق کالیبراسیون برای مشخص کردن پیکسلهای آب کمعمق یا ناحیه مورد نظر استفاده شده است. پیکسل هایی که انعکاس کمتری نسبت به حداقل مقدار بازتاب منطقه آب کم عمق دارند پیکسل های آب عمیق در نظر گرفته می شوند. این فرض بر این واقعیت استوار است که پیکسل های آب عمیق هر باند طیفی مرئی، بازتاب کمتری نسبت به پیکسل های آب کم عمق نشان می دهند. تابش طیفی یک منطقه آب عمیق عمدتاً سهمی از پراکندگی اتمسفر، بازتاب سطحی و پراکندگی حجم در آب است. بنابراین، می توان انتظار همبستگی بین باند مرئی و باند NIR را داشت.12 ]. محاسبه ضرایب رگرسیون با استفاده از ماژول GRASS GIS r.regression.line انجام می شود .
یک معادله لگاریتمی تبدیل شده (3) توسط [ 1 ] برای اصلاحات جوی و آب پیشنهاد شد .
جایی که X ( λ ) i تابش تبدیل شده است، L ( λ ) i تابش طیفی باند i بر روی یک منطقه آب کم عمق است و ( L ( λ ∞ ) i ) تابش طیفی باند i است . منطقه آب عمیق ضرایب رگرسیون ( α0 من، α1 i�0من، �1من) که از پیکسل های آب عمیق با رگرسیون بین باند طیفی مورد احترام و باند NIR (معادله (2)) به دست می آید برای اصلاحات جوی و آب یک منطقه آب کم عمق یا منطقه مورد نظر استفاده می شود. تابش پیکسل آب عمیق ( L ( λ ∞ ) i ) از رابطه (2) را می توان با معادله (3) جایگزین کرد تا یک تابش تبدیل شده را مطابق شکل زیر بدست آورد:
برای محاسبه معادله (4)، اول از همه، منطقه کاری در GRASS GIS باید به منطقه آب کم عمق یا منطقه مورد نظر تغییر یابد. پس از آن، مقادیر تخمینی α 0 i و α 1 i برای پیکسل های آب عمیق برای محاسبه تبدیل شده ( X ( λ ) i ) پیکسل های آب کم عمق برای باندهای مربوطه با استفاده از تابع r.mapcalc استفاده می شود (مرحله 3 در شکل) . 1 ).
3.4. رگرسیون وزنی جغرافیایی
مدل GWR یک مدل رگرسیون وزنی است که ضرایب β را برای هر پیکسل محاسبه می کند [ 16 ]. در مدلهای GWR، اصطلاح پهنای باند به شعاع پنجره هسته اشاره میکند. در مورد تابع Bi-square (معادله (5))، کاهش وزن فقط در صورتی اعمال می شود که فاصله از پیکسل فعلی کمتر از پهنای باند باشد، در غیر این صورت وزن اختصاص داده شده صفر خواهد بود. از طرف دیگر، تابع گاوسی پیوسته (معادله (6)) فروپاشی کسری وزن ها را با توجه به نزدیکی یک پیکسل به پیکسل فعلی نشان می دهد، حتی اگر فاصله از پیکسل فعلی بیشتر از پهنای باند باشد.
جایی که bw پهنای باند، d فاصله یک پیکسل تا پیکسل فعلی، و w p وزنی است که به یک پیکسل اختصاص داده شده است. در ماژول i.image.bathymetry ، هسته گاوسی پیشفرض است. در غیر این صورت کاربر می تواند با استفاده از یک پرچم -b همانطور که در شکل 1 نشان داده شده است، هسته دو مربعی را انتخاب کند . برای انتخاب نوع هسته مناسب به دانش قبلی نیاز است. [ 20 ] در مورد انتخاب هسته مناسب از نظر سطحی که باید تخمین زده شود و توزیع نقاط کالیبراسیون به تفصیل بحث کرده است.
3.4.1. ثابت-GWR
در GWR، پهنای باند انتخاب شده، پوشش فضایی هسته محلی را تعیین می کند، و اختصاص پهنای باند مناسب بسیار مهم است. دو راه برای تخصیص پهنای باند وجود دارد. یکی پهنای باند ثابت (Fixed-GWR) و دیگری پهنای باند تطبیقی است. در مورد Fixed-GWR، اندازه هسته در سراسر دامنه کاری یکسان است. بنابراین، Fixed-GWR بدون توجه به توزیع نقاط عمق کالیبراسیون، کل منطقه را به طور یکنواخت رفتار می کند. مدل ثابت-GWR در مقایسه با مدل تطبیقی GWR (A-GWR) از نظر محاسباتی فشرده و حافظه کمتری مصرف می کند. در نتیجه، مدل Fixed-GWR در بسیاری از بستههای نرمافزاری موجود است و به همین دلیل کاربرد آن آسان است. در GRASS GIS 7، ماژول r.gwr Fixed-GWR و A-GWR را با هسته های دو مربع، گاوسی و نمایی محاسبه می کند. راماژول i.image.bathymetry ماژول r.gwr را برای پردازش Fixed-GWR با انتخاب پهنای باند بهینه تولید شده از سیستم اتخاذ کرده است. باندهای طیفی اصلاح شده به عنوان متغیرهای مستقل و عمق کالیبراسیون به عنوان متغیر وابسته برای محاسبه Fixed-GWR (مرحله 4a در شکل 1 ) استفاده می شود. یک پرچم (-f) به منظور انجام تخمین عمق با استفاده از Fixed-GWR اجرا شده است ( شکل 1 ).
3.4.2. تطبیقی-GWR
در یک مدل A-GWR، اندازه هسته با در نظر گرفتن تراکم نقاط کالیبراسیون در یک محله محلی تنظیم می شود. وقتی نقاط کالیبراسیون متراکم تر هستند اندازه هسته کوچکتر می شود و وقتی نقاط کالیبراسیون کم هستند اندازه هسته افزایش می یابد. تحقیقات قبلی [ 18 ] نشان داده است که پهنای باند تطبیقی نسبتاً بهتر عمل می کند، به ویژه در مورد نقاط کالیبراسیون توزیع شده تصادفی. ماژول به نام GWmodel که در R موجود است برای محاسبه A-GWR استفاده شده است. باندهای طیفی تصحیح شده (مرحله 3 در شکل 1 ) با استفاده از کتابخانه rgrass7 به R وارد می شوند و این باندهای طیفی با استفاده از جدول داده های کتابخانه ای (مرحله 4b در شکل 1) بیشتر به یک قاب داده مکانی تبدیل می شوند .). یک چارچوب داده مکانی از باندهای طیفی به عنوان متغیر مستقل و عمق مرجع به عنوان متغیر وابسته برای محاسبه A-GWR با استفاده از مدل GW کتابخانه استفاده می شود. در GWmodel از تابعی به نام bw.gwr برای محاسبه پهنای باند بهینه استفاده می شود. در GWmodel، پهنای باند بهینه با استفاده از رویکرد اعتبارسنجی متقاطع تعیین میشود که در آن امتیازهای اعتبارسنجی به حداقل میرسد [ 16 ، 27 ، 28 ]. مدل A-GWR کندتر است و به حافظه بیشتری نسبت به مدل Fixed-GWR نیاز دارد. با این حال، به دلیل عملکرد بهتر، i.image.bathymetry به طور پیش فرض از یک مدل A-GWR استفاده می کند. اگر سیستم خاصی به دلیل حافظه کم نتواند مدل A-GWR را اجرا کند، یک Fixed-GWR برای تخمین SDB استفاده خواهد شد (مرحله 4b در شکل 1).).
4. اعتبار سنجی الگوریتم SDB پیاده سازی شده
چندین آزمایش با تصاویر ماهواره ای مختلف برای ارزیابی عملکرد i.image.bathymetry برای تخمین SDB انجام شده است. در اینجا، ما سه مطالعه موردی انجام شده در پورتوریکو و بخشهایی از استانهای ایواته و میاگی را ارائه میکنیم.
4.1. پورتوریکو، شمال شرقی دریای کارائیب
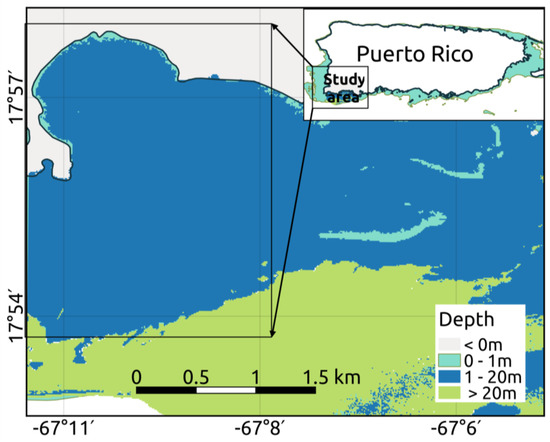
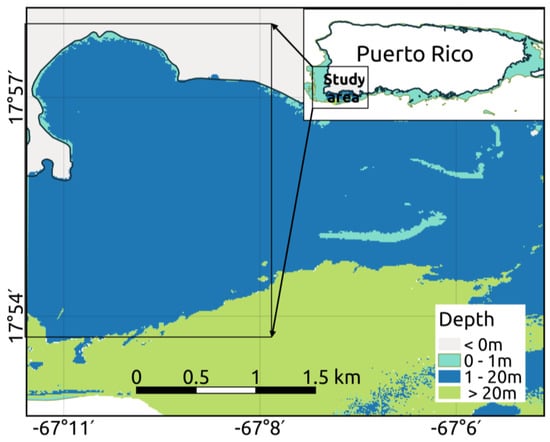
منطقه مورد مطالعه در شکل 2 نشان داده شده است و از نظر جغرافیایی 17 درجه و 54 دقیقه شمالی تا 17 درجه و 58 دقیقه شمالی و 67 درجه و 08 دقیقه شرقی تا 67 درجه و 12 دقیقه شرقی، حدود 40 کیلومتر مربع در امتداد یک گستره ساحلی 10 کیلومتری پورتوریکو را پوشش می دهد. گستره ساحلی پورتوریکو به دو دلیل به عنوان منطقه مورد مطالعه انتخاب شد. یکی از آنها در دسترس بودن داده های LiDAR با وضوح بالا باز است که توسط اداره ملی اقیانوسی و جوی (NOAA) ارائه شده است. ثانیا، شرایط آب شفاف مشاهده شده در منطقه می تواند تخمین بهتری داشته باشد. داده های عمق سنجی LiDAR ارائه شده توسط NOAA با استفاده از یک سیستم هوابرد عمق هوابرد لیزری (LADS) Mk II که بین 7 آوریل 2006 تا 15 می 2006 بررسی شد، به دست آمد. تصاویر محصول نهایی (تصویر Geotiff 16 بیتی) در 4 متر تولید شده است. × سطح حمام سنجی 4 متر [ 29].
دادههای با تفکیک فضایی و پرتوسنجی بالا (MSI) در 25 دسامبر 2015 جمعآوری شد. در مقایسه با سایر تصاویر ماهوارهای، Sentinel-2 دارای وضوح فضایی است که از 10 متر تا 60 متر برای باندهای چند طیفی و وضوح رادیومتریک متغیر است. در محدوده دینامیکی 12 بیتی کوانتیزه شد و به 16 بیت تغییر مقیاس داد. علاوه بر آن، Sentinel-2 چندین نوار لبه قرمز را ارائه می دهد که می توانند به طور موثر به عنوان باندهای اضافی برای تخمین SDB استفاده شوند. در دسترس بودن باند SWIR (1.53-1.68 میکرومتر) یکی دیگر از ویژگی های مهم Sentinel-2 است که می تواند برای اصلاحات جوی و آب استفاده شود. در این مطالعه، درونیابی دو خطی برای نمونهگیری مجدد پیکسلهای باند SWIR از 20 متر تا 10 متر انجام شده است. یک پیکسل 20 متری را می توان به چهار پیکسل 10 متری تقسیم کرد. مقدار پیکسل اول به عنوان مقدار اولیه پیکسل 20 متری نسبت داده شد و مقادیر سه پیکسل دیگر با استفاده از رابطه (7) درون یابی شدند. این روش درون یابی برای تمام پیکسل های 20 متری انجام شده است تا مقدار اصلی برای اولین پیکسل از چهار پیکسل 10 متری درون یابی شده حفظ شود.
که در آن، Z مقدار پیکسل و x ، y مختصات Z در یک ماتریس است. Z 1 , Z 2 , Z 3 و Z 4 پیکسل های همسایه ای هستند که برای محاسبه استفاده می شوند و ( x 1 , y 1 ), ( x 1 , y 2 , ( x 2 , y 1 ) و ( x 2 , y 2 ) به ترتیب مختصات هستند. تیو u شیبهای بین این مختصات هستند که میتوان آنها را به ترتیب به صورت ( x − x 1 )/ ( x 2 − x 1 ) و ( y − y 1 )/ ( y 2 − y 1 ) نوشت.
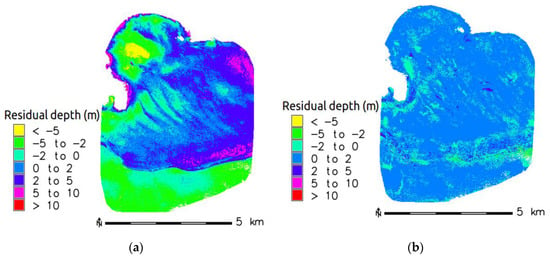
همانطور که در جدول 1 نشان داده شده است، تمام باندهای موجود در حوزه مرئی و باند مادون قرمز نزدیک (NIR) برای تخمین عمق سنجی مشتق از ماهواره (SDB) استفاده شدند . ارتفاع جزر و مد در طول گرفتن تصاویر ماهواره ای تقریبا صفر بود. بنابراین هیچ اصلاح جزر و مد اعمال نشد. تخمین با استفاده از 1260 نقطه عمق به عنوان متغیر وابسته انجام شده است و از 2000 نقطه عمق دیگر برای اعتبارسنجی نتایج استفاده شده است. هر دو نقطه عمق کالیبراسیون و اعتبارسنجی از 0 تا 20 متر متغیر بودند. اول از همه، یک مدل جهانی [ 20 ] برای تخمین SDB استفاده شده است، و نتایج دقت قابل اعتمادی را بر حسب ضریب همبستگی (R) 0.86، ضریب تعیین (R2) 0.74 و ریشه میانگین مربعات خطا (RMSE) نشان میدهد . ) از (2.53 متر) همانطور که در نشان داده شده استجدول 2 . با این وجود، یک بررسی دقیق با استفاده از نقشه عمق باقیمانده ( شکل 3 الف) نشان می دهد که ناهمگونی فضایی به طور موثر توسط یک مدل جهانی مورد توجه قرار نگرفته است. بنابراین، مطالعه بیشتر از مدلهای مبتنی بر GWR به منظور بهرهبرداری از همبستگی خودکار فضایی با پرداختن به ناهمگنی فضایی استفاده کرد. توابع وزن دهی مختلف در GWR پهنای باند ثابت (GWR ثابت) و GWR تطبیقی (A-GWR) مورد آزمایش قرار گرفتند. در میان گزینه های مختلف تلاش شده، A-GWR با استفاده از هسته دو مربعی SDB با دقت بالا تولید کرد. نتایج بر حسب R (99/0)، R2 (98/0) و RMSE (61/0 متر) مورد ارزیابی قرار گرفتند . شکل 3 ب به وضوح کارایی یک مدل مبتنی بر GWR را در پرداختن به ناهمگنی ناشی از انواع کف یا شرایط آب نشان می دهد.
4.2. استان ایواته، ژاپن
مطالعه دوم تخمین SDB را در یک منطقه ساحلی از استان Iwate، ژاپن نشان می دهد ( شکل 4 ). این منطقه مطالعه نسبتاً بسیار کوچکتر از منطقه مورد مطالعه قبلی است و تنها 4 کیلومتر مربع را پوشش می دهدو در امتداد 6 کیلومتر خط ساحلی امتداد دارد. Landsat-8 رایگان در دسترس با وضوح فضایی متوسط (30 متر) و وضوح رادیومتریک بالا در 31 اکتبر 2014 جمع آوری شد. وضوح رادیومتری بالاتر در محدوده دینامیکی 12 بیت کوانته شد و به محدوده دینامیکی 16 بیت برای تخمین SDB استفاده شد. تمام باندهای طیفی مرئی موجود و باند NIR برای تخمین و از باند SWIR (1.57-1.65 میکرومتر) برای تصحیح استفاده شد. در مجموع 3360 نقطه عمق (10 ژوئن 2012) توسط یک اکو صداگیر جمع آوری شد، 2342 نقطه عمق برای تخمین استفاده شد و از نقاط عمق باقی مانده برای ارزیابی دقت نتیجه استفاده شد. هر دو نقطه عمق کالیبراسیون و اعتبارسنجی از 0 تا 26 متر متغیر بودند.
ارتفاع جزر و مد در هنگام دریافت تصاویر ماهواره ای نزدیک به 1.35 متر بود و به عنوان مقدار ارتفاع جزر و مد در گزینه ماژول برای اعمال تصحیح ارائه شد. یک مدل جهانی برای تخمین SDB به منظور مقایسه دقت و بررسی پیشرفت های قابل توجه ارائه شده توسط مدل های مبتنی بر GWR استفاده شد ( جدول 2 ). توابع وزن دهی مختلف در Fixed-GWR و A-GWR مورد آزمایش قرار گرفتند. در میان آنها، A-GWR با استفاده از هسته دو مربعی SDB با دقت بالا بر حسب R (0.98)، R2 (0.97)، و RMSE (1.50 متر) تولید کرد . نتایج تفصیلی SDB در جدول 3 نشان داده شده است .
5. کاربرد مدل تسکین یکپارچه ساحلی و شبیه سازی سونامی
بخش قبلی نشان داد که i.image.bathymetry جدید توسعه یافته استقادر به تولید SDB با کیفیت بالا است. نتایج نشان میدهد که این ماژول میتواند برای تخمین SDB از شرایط مختلف آب ساحلی، چگالی نقاط عمق کالیبراسیون، و وضوح فضایی و رادیومتری دادههای ماهوارهای استفاده شود. بنابراین، در این بخش، این مطالعه به بررسی کاربرد SDB مشتق شده به عنوان ورودی در سناریوهای عملی می پردازد. هدف مطالعه ما ایجاد یک ICRM در بخشهایی از استان میاگی با ترکیب SDB مشتقشده با وضوحهای مختلف دادههای توپوگرافی و عمقسنجی است. ICRM می تواند برای نشان دادن یک سناریوی کاربردی عملی از SDB در شبیه سازی سونامی برای مخفی کردن رویداد واقعی استفاده شود. داده های عمق سنجی ساحلی با دقت درشت برای بسیاری از تحقیقات کاربردی شبیه سازی سونامی قبلی استفاده شد.30 ]. از این رو، هدف تحقیق توسعه ICRM بهتر در بخشهایی از استان میاگی، ژاپن است.
5.1. منطقه مطالعه و استفاده از داده ها
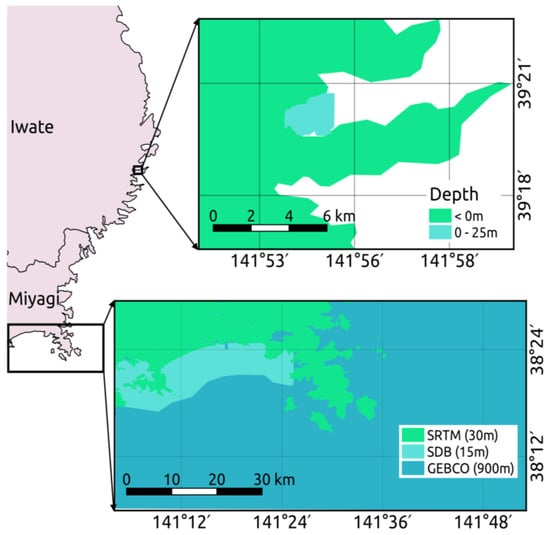
مناطق ساحلی در استان میاگی، ژاپن به طور قابل توجهی تحت تأثیر یک سونامی ناشی از زلزله قرار گرفتند که در 11 مارس 2011 در خارج از ژاپن رخ داد [ 31 ، 32 ]. این سونامی سومین زلزله بزرگی بود که در این دهه سونامی ایجاد کرد. با توجه به این موضوع، شبیهسازی سونامی با ترکیب SDB و سایر مجموعههای داده در بخشهایی از استان میاگی ( شکل 4 ) در امتداد یک کشش ساحلی به طول 110 کیلومتر انجام شده است .
وضوح فضایی متوسط (15 متر) ASTER داده های باز جمع آوری شده در 10 سپتامبر 2010 برای برآورد SDB استفاده شد. وضوح رادیومتری متوسط (8 بیتی کوانتیزه) در نوار سبز (0.52-0.60 میکرومتر) و نوار قرمز (0.63-0.69 میکرومتر) برای تخمین و از باند NIR (0.76-0.86 میکرومتر) به دنبال نادر برای تصحیح استفاده شد. جدول 1 ). J-EGG500 (Japan Oceanographic Data Center (JDOC) – Expert Grid data for Geographic-500m) داده های عمق سنجی با تفکیک شبکه 500 متری به عنوان نقاط عمق کالیبراسیون برای تخمین 15 متر SDB قابل اعتماد تقریباً در منطقه 219 کیلومتر مربع استفاده شد .در بخشی از منطقه ساحلی میاگی. در مجموع 649 نقطه عمق کالیبراسیون توزیع شده به طور مساوی برای کالیبراسیون و برای ارزیابی دقت استفاده شد. حتی اگر نقاط عمق پراکنده بودند، توزیع داده ها در فواصل مساوی بود. بنابراین، یک مدل Fixed-GWR برای تخمین SDB مورد استفاده قرار گرفت و انتظار می رفت که در این شرایط بهتر از یک مدل A-GWR عمل کند. نتایج SDB تولید شده از Fixed-GWR تطابق بهتری با عمق مرجع بر حسب R (0.93)، R2 (0.87) و RMSE (1.65 متر) نسبت به مدل A-GWR با R (0.91)، R2 نشان می دهد .(0.84) و RMSE (1.95 متر). هم تصویر ماهوارهای تابش و بازتاب حرارتی پیشرفته فضایی (ASTER) و هم دادههای J-EGG500 قبل از وقوع سونامی جمعآوری شدند. بنابراین SDB برآورد شده را می توان قابل اعتماد در نظر گرفت.
5.2. مدل تلفیقی امداد ساحلی
ICRM یک نمای جامع از مناطق ساحلی منطقه ای را ارائه می دهد و حمام سنجی دریایی را با توپوگرافی زمین در یک نمایش یکپارچه از ساحل ادغام می کند. در اینجا، ICRM برای ارائه یک نمایش یکپارچه از بخشهایی از استان میاگی ایجاد شد. این مدل جدیدترین داده های توپوگرافی در دسترس عموم و داده های عمق سنجی را در بر می گیرد ( شکل 4 ). دادههای توپوگرافی زمینی با وضوح کم (900 متر) در دسترس عموم جمعآوریشده از نمودار آبسنجی عمومی اقیانوسها (GEBCO) و دادههای توپوگرافی زمینی با وضوح متوسط (30 متر) جمعآوریشده از مأموریت توپوگرافی رادار شاتل (SRTM) [33] با SDB برآورد شده با استفاده از ASTER ترکیب شدند . (15 متر) برای توسعه ICRM بدون درز. ICRM با استفاده از یک مدل هیدرودینامیک منبع باز ANUGA [ 34] تولید شد]. ANUGA یک بسته نرمافزار منبع باز است که اکثر اجزای آن در پایتون پیادهسازی شدهاند و قادر به مدلسازی اثرات بلایای هیدرولوژیکی مانند شکستن سد، طغیان رودخانه، طوفان یا سونامی است. توابع ANUGA بستری را برای ترکیب چندین مجموعه داده شطرنجی وضوح فضایی برای یک ICRM جامع فراهم میکنند.
در مرحله اول، داده های شطرنجی GEBCO، SRTM، و SDB به صورت جداگانه به فرمت کد استاندارد آمریکایی برای تبادل اطلاعات (ASCII) با مختصات مرکاتور عرضی جهانی (UTM) با استفاده از ماژول r.out.ascii GRASS GIS تبدیل شدند. علاوه بر این، این دادههای ASCII با استفاده از اسکریپت anuga.asc2dem به قالب مدل ارتفاعی دیجیتال (DEM) تبدیل شد. علاوه بر این، فایل DEM با استفاده از anuga.dem2pts به فرمت نقطه ای تبدیل شد. سپس فایل نقطه ای حاوی داده های توپوگرافی با وضوح چندگانه با استفاده از اسکریپت ANUGA anuga.geospatial_data.geospatial_data ترکیب شد و یک ICRM بدون درز تولید شد.
5.3. شبیه سازی سونامی
در مورد شبیه سازی سونامی، معادلات 2 بعدی آب کم عمق غیرخطی معمولاً به صورت عددی بر روی یک شبکه یا شبکه پیاده سازی و حل می شوند، و راه حل های نرم افزاری زیادی برای شبیه سازی سونامی مانند TUNAMI [35]، ANUGA و TsunAWI [36] وجود دارد . ]. طغیان سونامی از طریق راهحلهای عددی معادلات غیرخطی آب کمعمق بر روی مدلی از عمقسنجی و توپوگرافی با توسعههای مناسب برای مدلسازی فرآیندهای خیس کردن و خشک کردن شبیهسازی میشود. ANUGA از مش های مثلثی بدون ساختار استفاده می کند که از چند ضلعی های داخلی برای تعیین حداکثر اندازه مجاز یک مش استفاده می شود. همانطور که در بخش 5.2 توضیح داده شد، ICRM شبکه های مثلثی بدون ساختار را نشان می دهد. سونامی توهوکو از لغزش پوسته پس از زلزله ایجاد شد. بنابراین یک اسلاید پوسته شبیهسازی سونامی ایجاد شد. اسکریپت پایتون موجود runcairns.py در ANUGA برای آزمایش شبیهسازی ما به کار گرفته شد و اصلاح شد. شرایط مرزی مانند بارندگی، جزر و مد، تنش باد، ناهمواری سطح و غیره در فرآیند شبیه سازی در نظر گرفته نشد. علاوه بر این، میانگین سطح دریا به عنوان سطح اولیه آب در نظر گرفته شد و از ضریب سرنشین ثابت استفاده شد.
6. نتیجه و بحث
این مطالعه یک ماژول متن باز GIS کاربر پسند را برای تخمین عمق سنجی از تصاویر ماهواره ای نوری ارائه می کند. اثربخشی I.image.bathymetryماژول با استفاده از سه مطالعه موردی با داده های چند وضوحی و چند صورت فلکی ارزیابی شده است. این ماژول دارای پیش پردازش داده های ماهواره ای و گزینه ای برای انجام اصلاح جزر و مد داده های عمق کالیبراسیون با جزر و مد در زمان ثبت تصاویر ماهواره ای است. منطقه تخمین SDB به طور خودکار با توزیع نقاط عمق کالیبراسیون تعیین می شود. بنابراین پیشنهاد میشود هنگام آمادهسازی نقاط عمق کالیبراسیون به منظور پوشش ناحیه مورد نظر مراقب باشید. علاوه بر این، یک پارامتر اختیاری برای ارائه یک فایل برداری چند ضلعی ایجاد شده است که مساحتی را که باید تخمین زده شود، تعریف می کند. پیکسل های آب عمیق برای تصحیح جو و آب استفاده می شوند. بنابراین، کاربران نیاز به ارائه داده های چند طیفی، که شامل مناطق آب عمیق است. یک تصویر ماهوارهای که منطقه آب عمیق ندارد نیز میتواند برای تخمین SDB بدون اعمال پیکسلهای آب عمیق برای تصحیح استفاده شود. در صورت عدم تامین مناطق آب عمیق، باند اصلاحی بدون استفاده از ضرایب رگرسیون آب عمیق برای اصلاح استفاده می شود. علاوه بر این، مطالعات قبلی ما [20 ] استفاده از باند SWIR را برای اصلاح به جای باند NIR پیشنهاد کرده اند. باند NIR تنها زمانی برای تصحیح استفاده می شود که تصاویر چندطیفی شامل باند SWIR نباشد، مانند تصاویری مانند ASTER. عملکرد کلیدی ماژول i.image.bathymetry تخمین مبتنی بر GWR است. تحقیقات فعلی و قبلی ما [ 20 ] نشان داده اند که مدل GWR می تواند به طور موثر مسائل ناهمگنی را به دلیل انواع مختلف کف و کیفیت آب برطرف کند و از این رو SDB بهبود یافته را ارائه دهد.
یک محدودیت عمده در مدلهای SDB ناتوانی در پرداختن به ناهمگونی فضایی به دلیل انواع مختلف کف و انواع آب است. ماژول ارائه شده برای پرداختن به این موضوع با استفاده از یک مدل مبتنی بر GWR پیشنهاد شده است. نتایج نشان داده شده در جدول 2 و جدول 4 به وضوح بهبودهایی را که توسط ماژول پیشنهادی با پرداختن به مسائل ناهمگنی محلی انجام شده است نشان می دهد. تفاوت آماری بین عمق مرجع و SDB تخمینی نشان داده شده در جدول 4 یک توافق خوب با یکدیگر را برای هر سه مطالعه موردی نشان می دهد.
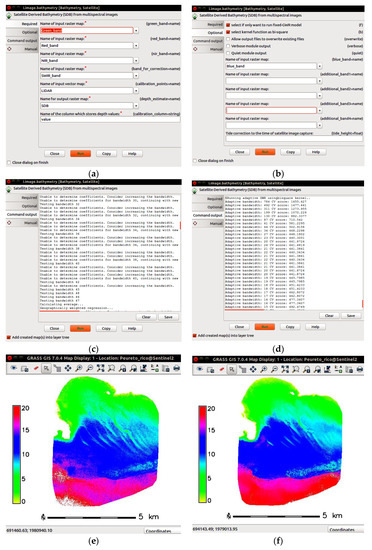
مطالعات موردی ارائه شده به منظور ارزیابی رفتار و عملکرد ماژول مربوط به عوامل مختلف مانند اندازه دادهها، وضوح فضایی/طیفی/رادیومتری، پوشش ابر و کیفیت آب منطقه مورد مطالعه انجام شد. جدول 3 عملکرد ماژول را به منظور درک تأثیر عوامل ذکر شده در بالا در تخمین SDB ارزیابی می کند. جدول 3عمدتاً دقت نتایج را از نظر توابع وزندهی هسته (دو مربع یا گاوسی) و حالت تخمین GWR (GWR ثابت یا A-GWR) مقایسه میکند. دستگاه مورد استفاده برای بنچمارک یک لپ تاپ با CPU Intel Core i5-3320M @2.60 گیگاهرتز بود. این سیستم دارای 16 گیگابایت رم و یک دیسک حالت جامد (SSD) با ظرفیت 512 گیگابایت است. سیستم عامل نصب شده (OS) GNU/Linux (Ubuntu 14.04 LTS x64-bit) است. نسخه GRASS 7.0.4 و R نسخه 3.3.1 برای بنچمارک استفاده شد. تصاویر نمایش داده شده در شکل 5 گزینه ها و گردش کار i.image.bathymetry را نشان می دهد . شکل 5 نمونه ای از مطالعه موردی 1 را برای نشان دادن پردازش با استفاده از هسته دو مربعی نشان می دهد. شکل 5 a ورودی مورد نیاز مورد استفاده در پردازش وشکل 5 b ورودی اختیاری و پرچم های اختیاری مورد استفاده برای تخمین SDB مبتنی بر GWR را نشان می دهد. پرچم -f استفاده شده در شکل 5 ب را می توان به منظور پردازش تخمین SDB مبتنی بر A-GWR حذف کرد. شکل 5 c روش تخمین پهنای باند بهینه را برای محاسبات مبتنی بر GWR ثابت نشان می دهد. تخمین پهنای باند بهینه از یک مقدار حداقل شروع می شود. این ماژول پس از تعیین پهنای باند بهینه، محاسبات GWR را انجام می دهد. در شکل 5 c، 47 به عنوان پهنای باند بهینه برای تخمین GWR ثابت تعیین شد. شکل 5 d تخمین پهنای باند بهینه A-GWR را در R با استفاده از امتیاز اعتبارسنجی متقاطع نشان می دهد. تعداد نقاط (15) انتخاب شده به عنوان پهنای باند تطبیقی بهینه در شکل 5 d نشان داده شده است.شکل 5 e,f SDB برآورد شده را به ترتیب با استفاده از Fixed-GWR و A-GWR در مانیتور GRASS GIS نشان می دهد.
مساحت تحت پوشش (40 کیلومتر مربع ) در مطالعه موردی 1 ( شکل 1 ) نسبتا بزرگتر بود و وضوح فضایی/طیفی/رادیومتری تصاویر استفاده شده بیشتر از مطالعات موردی 2 و 3 بود. جدای از آن، نقاط عمق بیشتری وجود داشت. برای کالیبراسیون استفاده شد و کیفیت آب منطقه نیز نسبتاً بهتر بود. بنابراین، مطالعه موردی 1 SDB با دقت بالا را از هر دو مدل ثابت و A-GWR تولید کرد ( جدول 3). زمان پردازش با استفاده از Fixed-GWR و A-GWR با هسته دو مربع و گاوسی ارزیابی شد. در مورد مدل Fixed-GWR، حدود 2 دقیقه برای تکمیل پردازش و در مورد مدل A-GWR، حدود 6 دقیقه برای تکمیل پردازش مورد نیاز است. از آنجایی که ناحیه مورد استفاده برای تخمین SDB یک سطح پیوسته بود، بدیهی است که هم Fixed و هم A-GWR عملکرد خوبی دارند [ 20 ]. در مطالعه موردی 1، منطقه مورد مطالعه یک سطح پیوسته با نقاط کالیبراسیون متراکم بود که به طور تصادفی روی آبهای نسبتاً شفاف توزیع شدهاند، در نتیجه تولید SDB با دقت خوب SDB برای هر دو مدل ثابت و A-GWR تسهیل میشود.
منطقه مورد مطالعه دوم (4 کیلومتر مربع) بخشی از استان Iwate (شکل 2) را پوشش داد و نسبتاً کوچکتر از منطقه در مطالعه موردی 1 بود، و برآورد SDB بر اساس تفکیک فضایی متوسط 30 متر بود. در مورد مدل Fixed-GWR، حدود 2.5 دقیقه برای تکمیل پردازش و در مورد مدل A-GWR، حدود 180 دقیقه برای تکمیل پردازش مورد نیاز است (جدول 3) .). A-GWR با یک هسته دو مربعی تخمین SDB بهتری را در مقایسه با حالت های دیگر ارائه می دهد. در مطالعه موردی 2، سطح پیوسته منطقه مورد مطالعه و نقاط عمق کالیبراسیون متراکمتر توزیع شده تصادفی به عنوان دو عامل مطلوب برای تخمین بهتر با استفاده از مدل A-GWR در نظر گرفته شد. مدل Fixed-GWR در این منطقه عملکرد خوبی ندارد که شاید نتیجه کیفیت پایین آب در منطقه مورد مطالعه باشد.
شکل 4 سومین منطقه مورد مطالعه را با بخش هایی از استان میاگی نشان می دهد که برای تولید ICRM و شبیه سازی سونامی استفاده شده است. در مورد مدل Fixed-GWR، حدود 3 دقیقه طول کشید تا پردازش تمام شود. در مورد مدل A-GWR، حدود 260 دقیقه برای تکمیل پردازش صرف شد ( جدول 3 ). نقاط عمق کالیبراسیون پراکنده بودند و در فواصل واحد (500 متر) توزیع شدند، و از این رو، انتظار می رفت که مدل Fixed-GWR تخمین های بهتر یا تقریبا مشابهی را با مدل A-GWR ارائه دهد [26 ] . Fixed-GWR با یک هسته دو مربعی SDB بهتری را ارائه می دهد.
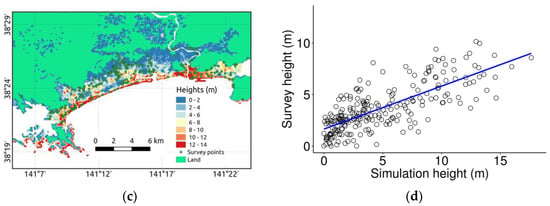
مطالعات موردی بالا کارایی i.image.bathymetry را در تخمین SDB روشن میکند و ورودی مفیدی را برای ICRM در شبیهسازی سونامی ارائه میدهد. شبیه سازی سونامی با مدت زمان 50 دقیقه انجام شد و نتایج با نتایج بررسی پس از سونامی [ 33 ] ارزیابی شد. تکان های اصلی زمین لرزه 3 تا 4 دقیقه به طول انجامید، و به دلیل نزدیکی مرکز زمین لرزه به ساحل، اولین امواج قابل توجه تنها 10 دقیقه پس از شروع رویداد به ژاپن رسید [37 ] . در این مطالعه، وسعت طغیان و ارتفاعات شبیهسازی سونامی را با دادههای بررسی پس از سونامی مقایسه کردیم. آزمایش شبیه سازی نشان می دهد که مساحتی در حدود 115 کیلومتر مربع استغرق شد سونامی شبیهسازی شده با ارتفاع حدود 14 متر تا 5 کیلومتر به داخل خشکی سفر کرد و مناطق ایشینوماکی و هیگاشیماتسوشیما بیشترین تأثیر را داشتند. این مناطق زمین های کم ارتفاعی هستند و رودخانه کیتاکامی از منطقه ایشینوماکی می گذرد. این عوامل می توانند در تقویت طغیان سونامی نقش داشته باشند ( شکل 6 ).
شکل 5 مقایسه بین نتایج شبیه سازی و نتایج بررسی پس از سونامی را نشان می دهد. شکل 6 a وسعت واقعی آبگرفتگی را نشان می دهد و شکل 6 b وسعت سیل شبیه سازی شده را در 50 دقیقه نشان می دهد. ارتفاعات سیلاب سونامی بررسی شده در 243 نقطه بر روی نقشه ارتفاع طغیان سونامی شبیه سازی شده قرار گرفته است ( شکل 6 ج). شکل 6 d همبستگی بین ارتفاعات غرقاب سونامی بررسی شده و شبیه سازی شده را نشان می دهد. شکل 6c,d نشان می دهد که حداکثر سیلابی مشاهده شده به ترتیب در حدود 10 متر و 14 متر در رویدادهای بررسی و شبیه سازی شده بود. ارزیابی ارتفاعات طغیان سونامی شبیهسازیشده یک توافق معقول را با دادههای بررسی پس از سونامی از نظر R (0.75)، R2 (0.57)، و RMSE (2.98 متر) نشان میدهد .
7. نتیجه گیری
مطالعه ما نتیجه می گیرد که ماژول i.image.bathymetry GRASS GIS می تواند راه حلی موثر برای SDB در نظر گرفته شود. ماژول را می توان از https://svn.osgeo.org/grass/grass-addons/grass72/imagery/ دانلود کرد یا با استفاده از ماژول g.extension در GRASS GIS نصب کرد. دقت SDB به ویژگی های تصاویر ماهواره ای، تعداد و توزیع نقاط عمق کالیبراسیون و شرایط آب منطقه مورد مطالعه بستگی دارد. هدف همه مطالعات موردی ارزیابی عملکرد ماژول در پرداختن به ویژگیهای دادهها بود که بسته به دادههای مورد استفاده و منطقه مورد بررسی متفاوت بود. I.image.bathymetry _ماژول به کاربر این امکان را می دهد که هر دو مدل ثابت و A-GWR را با تابع وزن دهی هسته دو مربع یا گاوسی انتخاب کند. اگر کاربر اطلاعات قبلی در مورد منطقه مورد مطالعه داشته باشد، می توان از این گزینه به طور موثر استفاده کرد. این مطالعه همچنین هزینه محاسباتی را برای تخمین مدل های ثابت و A-GWR، با مقایسه دقت SDB تولید شده، ارزیابی کرد. چنین ارزیابی نشان می دهد که یک مدل A-GWR از نظر محاسباتی فشرده است، به ویژه برای یک مجموعه داده بزرگ، اما بهترین نتایج را ارائه می دهد. با این حال، هر دو مدل Fixed و A-GWR SDB را با دقت قابل قبولی تخمین زدند، و از این رو، پیشنهاد میشود با توجه به توزیع نقاط عمق کالیبراسیون، اندازه تصویر و RAM موجود در رایانه، از Fixed یا A-GWR استفاده شود.
یک مشکل رایج در SDB تفاوت جزر و مد بین عمق کالیبراسیون و تصویر ماهواره ای است. بنابراین، اگر ارتفاع جزر و مد در هنگام دریافت تصاویر ماهواره ای ارائه شده باشد، ماژول اجازه می دهد تا اصلاح جزر و مد انجام شود. یک مدل انتقال تابشی ذاتاً به ظرفیت نفوذ نور به کف دریا مربوط می شود و اطلاعاتی در مورد عمق آب ارائه می دهد. با این حال، در آب های شفاف حتی با حداقل تعداد نقاط عمق کالیبراسیون می توان دقت بهتری را انتظار داشت. I.image.bathymetry _ماژول به طور موثر مشکل ناهمگونی در انواع کف و کیفیت آب را با استفاده از باندهای چند طیفی در یک مدل GWR حل می کند. نتایج ما نشان میدهد که تمام باندهای طیفی موجود در حوزه طیفی مرئی را میتوان برای تخمین بهتر SDB در اختیار ماژول قرار داد.
این مطالعه نمونه های کاربردی SDB را در یک مدل شبیه سازی سونامی نشان داده است. نتایج شبیهسازی سونامی تطابق خوبی با نتایج بررسی پس از سونامی نشان میدهد. چشم انداز آینده این مطالعه به کارگیری i.image.bathymetry استبه عنوان یک سرویس پردازش وب (WPS) برای تسهیل داده های SDB درخواستی برای کاربر بدون نیاز به نرم افزار و داده های محلی. در مورد ژاپن، داده های عمق با وضوح کم (500 متر) (J-EGG500) به عنوان داده باز موجود است. دادههای عمق J-EGG500 همراه با تصاویر ماهوارهای باز مانند Landsat-8، ASTER، Sentinel-2، و غیره را میتوان با SDB بهعنوان سرویسی برای کاربرانی که تخصص محدودی در سنجش از دور و تجزیه و تحلیل جغرافیایی دارند، استفاده کرد. GRASS GIS همچنین چارچوبی برای محاسبات موازی ارائه می دهد که ممکن است هنگام در نظر گرفتن اجرای آینده الگوریتم SDB به عنوان یک وب سرویس مفید باشد.




بدون نظر