

چکیده
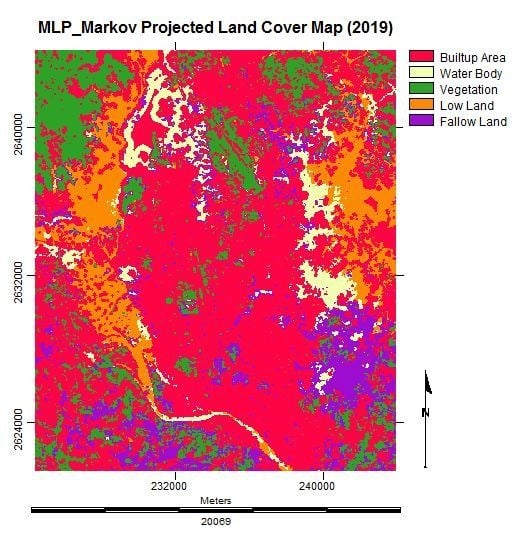
هدف اصلی این تحقیق پیشبینی و تحلیل رشد شهری آینده شهر داکا با استفاده از تصاویر ماهوارهای لندست در سالهای 1989، 1999 و 2009 است. شرکت شهر داکا (DCC) و مناطق تاثیرگذار اطراف آن به عنوان منطقه مورد مطالعه انتخاب شدهاند. در ابتدا، از روش طبقه بندی تحت نظارت فیشر برای تهیه نقشه های پایه با پنج طبقه پوشش زمین استفاده شده است. در مرحله بعد، سه مدل مختلف برای شبیه سازی نقشه پوشش زمین شهر داکا در سال 2009 پیاده سازی شده است که به نام های Stochastic Markov (St_Markov) مدل، Cellular Automata Markov (CA_Markov) و مدل چند لایه نامگذاری شده اند. پرسپترون مارکوف (MLP_Markov)” مدل. سپس بهترین مدل برازش با اجرای روشی برای مقایسه دستههای پوشش زمین در سه نقشه انتخاب شده است: نقشه مرجع زمان 1، یک نقشه مرجع زمان 2 و یک نقشه شبیه سازی زمان 2. اینگونه است که مدل “پرسپترون چند لایه مارکوف (MLP_Markov)” به عنوان مناسب ترین مدل برای این تحقیق شناخته شده است. بعداً با استفاده از مدل MLP_Markov نقشه پوشش زمین سال 2019 پیش بینی شده است. مدل MLP_Markov برون یابی می کند که مساحت ساخته شده از 46٪ به 58٪ از کل منطقه مورد مطالعه طی سال های 2009-2019 افزایش می یابد.
کلید واژه ها:
سنجش از دور ؛ پوشش زمین ؛ زنجیره مارکوف ؛ اتوماتای سلولی ; شبکه عصبی پرسپترون چند لایه تشخیص تغییر ؛ طبقه بندی تحت نظارت ; GIS
1. مقدمه
1.1. پیشینه تحقیق
مانند بسیاری از شهرهای دیگر جهان، داکا، پایتخت بنگلادش نیز نتیجه رشد سریع خود به خودی است. از آنجایی که رشد جمعیت در داکا با سرعت فوقالعاده سریعی در حال انجام است، این شهر به یکی از پرجمعیتترین شهرهای بزرگ جهان تبدیل شده است.
شهر داکا دستخوش تغییرات اساسی در شکل فیزیکی خود شده است، نه تنها در گسترش وسیع سرزمینی خود، بلکه از طریق دگرگونی های فیزیکی داخلی در طول دهه های گذشته. اینها انواع کاملاً جدیدی از بافت شهری را ایجاد کرده اند. در روند شهرنشینی، ویژگیهای فیزیکی شهر داکا به تدریج در حال تغییر است، زیرا زمینها و فضاهای باز به مناطق ساختمانی، میدانهای باز به پارکینگ، زمینهای پست و آبها به زمینهای بازسازیشده و غیره تبدیل شدهاند .
داکا در حال حاضر به دلیل فرصت های شغلی با درآمد خوب، آموزش، بهداشت و سایر امکانات زندگی روزمره، حجم عظیمی از مهاجران روستایی-شهری را از سراسر کشور جذب می کند. این نوع فشار فزاینده و بیش از حد جمعیت، تأثیرات نامطلوبی مانند شهرنشینی برنامهریزی نشده، فقر گسترده شهری، قطع آب، رشد زاغهها و محلهنشینیهای شهری، ترافیک، آلودگی محیطزیست و سایر مشکلات اجتماعی-اقتصادی بر شهر داکا وارد میکند [ 1 ].
اگر این وضعیت ادامه پیدا کند، داکا به زودی به یک محله فقیر نشین شهری با کمترین وضعیت زندگی برای شهرنشینان تبدیل خواهد شد. بنابراین، هدف اصلی این مقاله پیشبینی تغییرات پوشش زمین شهری آینده منطقه مورد مطالعه انتخاب شده در شهر داکا است.
1.2. آثار موجود
با پیشرفت تکنولوژی، کاهش هزینه دادهها، در دسترس بودن دادههای مکانی-زمانی تاریخی و تصاویر ماهوارهای با وضوح بالا، تکنیکهای سنجش از دور (RS) و سیستم اطلاعات جغرافیایی (GIS) اکنون برای انجام تحقیقاتی مانند تجزیه و تحلیل تشخیص تغییر پوشش زمین بسیار مفید هستند. و پیش بینی سناریوی آینده [ 2 ].
بسیاری از محققین برای شناسایی الگوی تغییر کاربری/پوشش زمین در طول زمان و پیشبینی رشد آتی مناطق شهری تحقیقات زیادی انجام دادهاند. آنها تکنیک های مختلفی را برای دستیابی به اهداف تحقیق معرفی و به کار گرفته اند. در میان آنها، گریفیث و همکاران. با استفاده از داده های چند حسی به نقشه برداری از رشد شهری منطقه کلان شهر داکا (1990 تا 2006) پرداخته اند. آنها از یک طبقهبندیکننده ماشین بردار پشتیبان (SVM) و مقایسه پس از طبقهبندی برای نشان دادن الگوهای مکانی-زمانی تغییرات کاربری زمین و پوشش زمین استفاده کردهاند [ 3 ].
دوان و یاماگوچی با استفاده از تصاویر ماهوارهای و دادههای اجتماعی-اقتصادی تلاش کردهاند تغییرات پوشش زمین و گسترش شهری در داکای بزرگ را بین سالهای 1975 و 2003 ارزیابی کنند. یک الگوریتم طبقه بندی نظارت شده و تکنیک تشخیص تغییر پس از طبقه بندی در GIS توسط آنها پیاده سازی شده است. آنها دقت نقشه های پوشش زمین مشتق شده از Landsat را بین 85 تا 90 درصد یافته اند [ 4 ].
Emch و Peterson با استفاده از تصاویر ماهوارهای Landsat Thematic Mapper (TM) تغییر پوشش جنگلی حرا را در سانداربان در جنوب غربی بنگلادش از سال 1989 تا 2000 اندازهگیری کردند. آنها از سه تکنیک پردازش تصویر استفاده کرده اند: شاخص گیاهی متمایز نرمال شده (NDVI)، طبقه بندی حداکثر احتمال و طبقه بندی زیر پیکسل [ 5 ].
کاشم مدل رشد شهری SLEUTH را برای شبیه سازی الگوی رشد تاریخی منطقه شهری داکا پیاده سازی کرده است. مدل SLEUTH شامل لایههای شیب، کاربری زمین، لایههای خروج (جایی که رشد نمیتواند رخ دهد)، شهری، حملونقل و لایههای داده سایه تپه را در بر میگیرد. SLEUTH از اتوماتای سلولی اصلاح شده (CA) برای مدل سازی گسترش شهرنشینی استفاده می کند [ 6 ]. لاهتی رشد شهری سیدنی، استرالیا را تا سال 2106 پیشبینی کرده است.]. کابرال و زامیاتین سه مدل تغییر زمین را برای پیشبینی پویایی شهری در شهرداریهای سینترا-کاسکائیس پرتغال برای سال 2025 اجرا کردهاند. مدلها مدل زنجیره مارکوف CA (CA_Markov)، CA_Advanced و Geomod هستند. آنها از روش های تقسیم بندی تصویر و بافت برای طبقه بندی تصاویر Landsat در سال های 1989، 1994 و 2001 استفاده کرده اند [ 8 ].
وانگ و مونتراکیس یک چارچوب مدلسازی مبتنی بر GIS با عنوان مدل شهرسازی چند شبکهای (MuNU) ایجاد کردهاند که شبکههای عصبی متعدد را ادغام میکند تا رشد شهری منطقه شهری دنور، CO، ایالات متحده را پیشبینی کند [ 9 ]. چنگ و ماسر از یک روش تجزیه و تحلیل داده های فضایی استفاده کرده اند که شامل تجزیه و تحلیل داده های اکتشافی و تکنیک رگرسیون لجستیک فضایی است، تا عوامل تعیین کننده اصلی رشد شهری را در دوره 1993-2000 شهر ووهان در روابط عمومی چین جستجو و مدل سازی کنند [ 10 ].
2. مواد
2.1. منطقه مطالعه
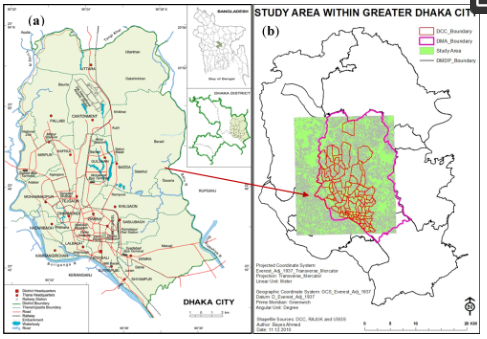
داکا در مرکز بنگلادش در 23 درجه و 43 دقیقه اینچ شمالی، 90 درجه و 24 دقیقه اینچ شرقی، در کرانههای شرقی رودخانه بوریگانگا واقع شده است ( شکل 1 (الف)). شهر داکا در منطقه داکا واقع شده است که توسط رودخانه ها احاطه شده است. منطقه مطالعاتی پیشنهادی برای این تحقیق، شرکت داکا سیتی (DCC) و مناطق تاثیرگذاری اطراف آن است ( شکل 1)(ب)). این منطقه با توجه به روند کنونی شهرنشینی سریع، پتانسیل را برای مواجهه با رشد عظیم شهری در آینده نزدیک افزایش داده است. منطقه مورد مطالعه قدیمیترین بخش ارگانیک شهر داکا (داکای قدیم)، مناطق برنامهریزیشده و حتی مناطق ارگانیک نسل جدید برنامهریزی نشده که «سکونتگاههای غیررسمی» نامیده میشوند را در بر میگیرد. این منطقه مطالعه انتخاب شده تقریباً بزرگترین تراکم شهری را پوشش می دهد و از نظر جنبه های اجتماعی و اقتصادی بخش مرکزی بنگلادش است [ 11 ].
2.2. داده های سنجش از راه دور
برای تهیه نقشه های پایه به منظور تحلیل و به کارگیری روش های مختلف برای دستیابی به اهداف تحقیق، تصاویر ماهواره ای لندست (1989، 1999 و 2009) از وب سایت رسمی سازمان زمین شناسی آمریکا (USGS) جمع آوری شده است. مسیر لندست 137 ردیف 44 کل منطقه مورد مطالعه را پوشش می دهد. طرح نقشه تصاویر ماهواره ای جمع آوری شده مرکاتور عرضی جهانی (UTM) در منطقه 46 N–Datum World Geodeetic System (WGS) 84 و اندازه پیکسل 30 متر است. پنج نوع پوشش زمین برای این تحقیق شناسایی شده است ( جدول 1 ).
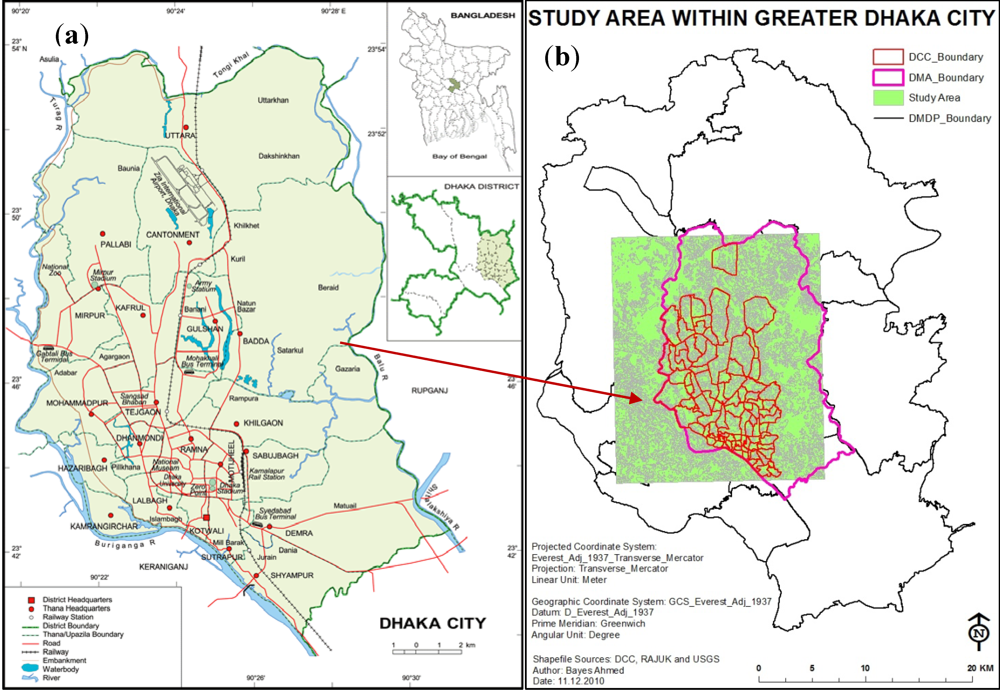
شکل 1. ( الف ) موقعیت شهر داکا در بنگلادش، ( ب ) موقعیت منطقه مورد مطالعه در شهر داکای بزرگ. نقشه 1 ( a ) منبع: بنگلاپدیا، دایره المعارف ملی بنگلادش، 2011.

جدول 1. جزئیات انواع پوشش زمین.
تصاویر ماهواره ای لندست مورد استفاده برای تجزیه و تحلیل با کیفیت ها و تاریخ های متفاوتی هستند ( جدول 2 ). به منظور اطلاعات زمینی، چندین نقشه پایه شهر داکا (برای سال های 1987، 1995 و 2001) از بررسی بنگلادش (SoB) جمع آوری شده است. Google Earth گزینه دیگری برای دریافت ایده هایی در مورد الگوی پوشش زمین اخیر شهر داکا بود. نقشه جزئیات کاربری زمین (2009) شهر داکا از شرکت شهر داکا (DCC) جمع آوری شده است. این داده های مرجع برای آموزش انتخاب مکان و ارزیابی دقت نقشه های پوشش نهایی زمین استفاده شده است.
جدول 2. جزئیات تصاویر ماهواره ای لندست. (منبع: US Geological Survey, 2011).
2.3. تهیه نقشه پایه
طبقه بندی نظارت شده بر دانش پیشینی منطقه مورد مطالعه [ 12 ] متکی است. بنابراین برای این تحقیق از روش طبقه بندی نظارت شده استفاده شده است.
2.3.1. توسعه سایت آموزشی
سایت های آموزشی مناطقی هستند که برای هر نوع پوشش زمین در تصویر تعریف شده اند. ترکیب رنگ انتخاب شده برای دیجیتالی کردن چند ضلعی های اطراف هر سایت آموزشی برای پوشش زمین مشابه استفاده می شود. سپس یک شناسه منحصر به فرد به هر نوع پوشش زمین شناخته شده اختصاص داده می شود [ 12 ]. در ابتدا سایت های آموزشی بر اساس داده های مرجع جمع آوری شده و اطلاعات جانبی توسعه یافته اند.
2.3.2. توسعه امضا
این مرحله ایجاد امضای طیفی برای هر نوع پوشش زمین است. این کار با تجزیه و تحلیل پیکسل های سایت های آموزشی انجام می شود. هنگامی که دیجیتالی کردن سایت های آموزشی به پایان رسید، مشخصات آماری هر طبقه پوشش زمین مورد نیاز است. به اینها امضا [ 12 ] می گویند.
2.3.3. طبقه بندی
پس از توسعه فایل های امضا برای همه انواع پوشش زمین، تصاویر با استفاده از یک طبقه بندی سخت به نام “Fisher Classifier” طبقه بندی شده اند. طبقه بندی کننده فیشر از مفهوم تحلیل تشخیص خطی استفاده می کند [ 12 ]. Fisher Classifier زمانی که مناطق بسیار کمی از کلاس های ناشناخته وجود دارد و زمانی که سایت های آموزشی نماینده کلاس های اطلاعاتی آنها هستند، عملکرد خوبی دارد [ 12 ]. به همین دلیل است که طبقه بندی کننده فیشر برای این تحقیق خاص مناسب است، زیرا بیشتر مناطق برای طبقات شناخته شده است.
2.3.4. تعمیم
پس از طبقه بندی تصویر، گاهی اوقات ممکن است بسیاری از پیکسل های جدا شده پیدا شود [ 12 ]. این پیکسل های جدا شده ممکن است متعلق به یک یا چند کلاس باشند که با پیکسل های اطراف متفاوت هستند. بنابراین لازم است تصویر را تعمیم داده و پیکسل های جدا شده را حذف کنید. فیلتر کردن راه حل این نوع مشکلات است. بنابراین یک فیلتر حالت 3×3 برای تعمیم تصاویر پوشش زمین طبقه بندی شده فیشر اعمال شده است. این عملیات پس از پردازش، پیکسل های جدا شده را به رایج ترین کلاس همسایه جایگزین می کند. در نهایت تصاویر تعمیم یافته برای تولید نسخه نهایی نقشه های پوشش زمین برای سال های مختلف مجددا طبقه بندی می شوند ( شکل 2).). مهم است که به یاد داشته باشید که طبقهبندی نظارت شده در هر سال مستقل از طبقهبندی سالهای دیگر است، زیرا این روش میتواند منجر به بیش از حد برآوردهای قابلتوجهی از تغییر زمین در تحلیل تغییر پس از طبقهبندی شود.
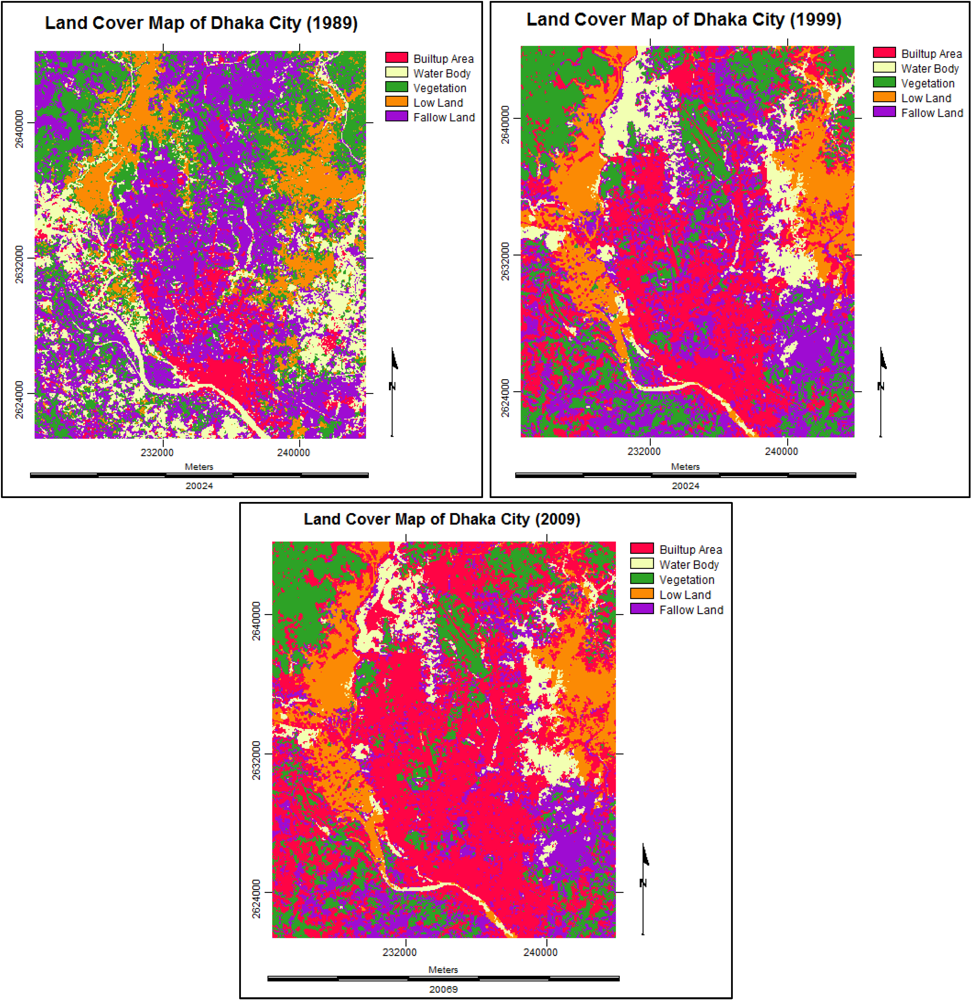
شکل 2. نقشه های پوشش زمین منطقه مورد مطالعه.
2.4. ارزیابی دقت
مرحله بعدی فرآیند طبقه بندی تصاویر، ارزیابی دقت است. مشخص کردن حقیقت هر پیکسل از تصویر طبقه بندی شده معمولی نیست. بنابراین برخی از پیکسل های مرجع تولید می شوند [ 13 ]. نقاط انتخاب شده به طور تصادفی در تصویر طبقه بندی شده دو مجموعه کلاس را فهرست می کنند. اولین مجموعه از مقادیر کلاس نشان دهنده نوع پوشش زمین در نقشه است. مجموعه دوم مقادیر کلاس به عنوان مقادیر مرجع شناخته می شود. این مقادیر مرجع توسط محقق وارد می شود که بر اساس داده های حقیقت زمینی است. بنابراین 250 پیکسل مرجع برای هر تصویر طبقه بندی برای این تحقیق برای انجام ارزیابی دقت تولید شده است. سپس از نقشه های پایه جمع آوری شده برای یافتن انواع پوشش اراضی نقاط مرجع استفاده شده است.
2.4.1. دقت کاربر، سازنده و کلی
دقت کاربر برای دسته K، درصد دسته K در اطلاعات مرجع است، با توجه به اینکه نقشه رده K را نشان می دهد. دقت تولید کننده برای دسته K، درصد دسته K در نقشه است، با توجه به اینکه اطلاعات مرجع رده K را نشان می دهد [ 14 ] . دقت تولیدکننده و کاربر برای تمام سالها تقریباً از 71% تا 100% متغیر است ( جدول 3 ، جدول 4 و جدول 5 ).
جدول 3. مجموع دقت (1989).
جدول 4. مجموع دقت (1999).
جدول 5. مجموع دقت (2009).
دقت کلی نشاندهنده درصد پیکسلهای طبقهبندی صحیح است [ 14 ]. با تقسیم تعداد مشاهدات صحیح بر تعداد مشاهدات واقعی به دست می آید. دقت کلی برای سال های 1989، 1999 و 2009 به ترتیب 85.20، 86.80 و 91.60 درصد است.
2.4.2. خطای نقشه در مقابل مقدار تفاوت بین نقشه ها
در نقشه های سال های 1989، 1999 و 2009 به ترتیب 14.8، 13.2 و 8.4 درصد خطای نقشه گزارش شده است. این اشتباهات در نقشه ها به وضوح قابل چشم پوشی نیستند. این یک مشکل بسیار رایج در علم تغییر زمین است که میزان خطا در نقشه ها تقریباً به اندازه مقدار تغییر روی زمین است. بنابراین لازم است خطا در نقشه ها را با میزان تفاوت در طی سال های 1989-1999 و 1999-2009 مقایسه کنیم.
مقدار تغییر زمین از حدود 2٪ تا 20٪ برای سالهای 1989-1999 متغیر است، در حالی که این رقم برای سالهای 1999-2009 تقریباً 1٪ تا 17٪ است ( جدول 6 و جدول 7 ). بنابراین به طور میانگین می توان بیان کرد که خطاهای نقشه ها خیلی بیشتر از مقدار تغییر زمین بین دو نقطه زمانی (1989-1999 و 1999-2009) نیست.
جدول 6. مقدار تفاوت (1989-1999).
جدول 7. مقدار تفاوت (1999-2009).
2.4.3. محدودیت در تهیه نقشه پایه و ارزیابی دقت
در نهایت می توان بیان کرد که در نقشه های طبقه بندی شده پوشش اراضی شهر داکا، طبقه بندی نادرست کمی مشاهده شده است. دلایل ممکن است به شرح زیر باشد:
-
همان ویژگی های طیفی برخی از انواع پوشش زمین. به عنوان مثال، در مورد نقشه پایه 1989، برخی از مناطق ساخته شده به اشتباه به عنوان زمین آیش طبقه بندی شدند. باز هم، در بیشتر موارد، جداسازی مجموعههای آب و اراضی کم/قابل کشت واقعاً دشوار بود. دلایل ممکن است تغییرات فصلی تصاویر ماهواره ای برای سال های مختلف و ویژگی های طیفی مشابه پوشش های زمین در برخی موارد باشد. تصاویر جمع آوری شده برای سال های 1999 (نوامبر) و 2009 (اکتبر) مربوط به همان فصل زمستان است. اما تصویر سال 1989 (بهمن) مربوط به فصل دیگری یعنی تابستان است. این نوع تغییرات هنگام تهیه نقشه های پایه برای تجزیه و تحلیل مشکلاتی را ایجاد می کند.
-
علاوه بر این، وضوح طیفی تصویر کمتر به اختلاط طیفی انواع مختلف پوشش زمین منجر شده است. این باعث سردرگمی طیفی در بین انواع پوشش شده است. همچنین لازم به ذکر است که تصاویر سال های 1999 و 2009 نمایانگر فصل زمستان است در حالی که تصویر سال 1989 نمایانگر فصل بهار است. بنابراین سایر تصاویر فصلی می توانند برای ارزیابی الگوی تغییر پوشش زمین این نوع محیط شهری بسیار پویا مانند داکا مهم باشند.
-
باز هم وضوح فضایی تصاویر مهم است. برای این هدف تحقیقاتی، تصاویر ماهوارهای لندست انتخاب شدهاند که فقط به صورت تجاری در دسترس هستند، اما میتوان آنها را در دامنه عمومی رایگان یافت. مشکل اصلی کار با تصاویر لندست رزولوشن پایین است. وضوح فضایی تصویر لندست 30 متر است. IKONOS، QuickBird یا سایر تصاویر ماهواره ای با وضوح بالاتر می توانند گزینه های بهتری باشند.
-
محدودیت بعدی در مورد این تحقیق، جمع آوری داده ها یا نقشه های مرجع است. داده های مرجع برای هدف صحت زمینی نقشه های پایه (1989، 1999 و 2009) که از تصاویر ماهواره ای لندست تهیه شده اند، ضروری است. اما نقشه های مرجع سال های مربوطه (1989، 1999 و 2009) در دسترس نیست. بنابراین نقشههای پایه شهر داکا در سالهای 1987، 1995 و 2001 که از بررسی بنگلادش (SoB) جمعآوری شدهاند، به منظور ارجاع استفاده شدهاند. تصاویر Google Earth (2010) به عنوان داده های مرجع برای صحت سنجی نقشه پایه سال 2009 استفاده می شود.
-
این نوع تحقیقات به بازدید میدانی گسترده برای طبقه بندی تصاویر و ارزیابی دقت تصاویر ماهواره ای نیاز دارد. نکته دیگر تایید تصاویر قدیمی است. برای تصاویر قدیمی تر، بازدید از میدان برای یافتن انواع پوشش واقعی زمین امکان پذیر نیست. این موارد را میتوان با بازدید میدانی اخیر برای جمعآوری دادههای سیستم موقعیتیابی جهانی (GPS) برای راستیآزمایی پوشش زمین/ هدف راستیآزمایی زمین بهبود بخشید. برای حل مشکلات تصاویر ماهواره ای قدیمی تر، باید نقشه های پایگاه تاریخی سال های مشابه جمع آوری شود.
دقت کلی نقشه های پایه را می توان بهتر به دست آورد اگر محدودیت های ذکر شده در بالا کاهش یابد.
3. روش ها، نتایج و بحث
3.1. تجزیه و تحلیل تشخیص تغییر پوشش زمین
در سنجش از دور، “تشخیص تغییر” به عنوان فرآیند تعیین و نظارت بر تغییرات در انواع پوشش زمین در دوره های زمانی مختلف تعریف می شود. این تجزیه و تحلیل کمی از توزیع فضایی در منطقه مورد نظر [ 15 ] را ارائه می دهد. برای انجام تحلیل تشخیص تغییر، از معیارهای سطح کلاس استفاده شده است. معیارهای سطح کلاس بر روی تمام وصله های یک نوع (کلاس) معین یکپارچه می شوند [ 16 ]. برای این منظور از قانون همسایگی پچ 8 سلولی استفاده شده است. قانون 8 سلولی همه 8 سلول مجاور شامل 4 همسایه متعامد و 4 همسایه مورب را در نظر می گیرد.
3.1.1. تعداد وصله ها (NP)
NP برابر است با تعداد وصله های نوع پچ (کلاس) مربوطه. تعداد تکههای یک طبقه خاص یا نوع پوشش زمین، معیار سادهای از میزان تقسیم یا تکه تکه شدن طبقه است [ 16 ]. تعداد لکه ها (بلوک های شهری در این مورد) از مناطق ساخته شده و انواع زمین های آیش در طول زمان افزایش یافته است. باز هم کاهش بدنه آبی و پوشش گیاهی برجسته است ( شکل 3 ). این امر نشان دهنده توسعه تدریجی زیرساخت های شهری است که بدنه های آبی، پوشش گیاهی و زمین های پست را تبدیل می کند.
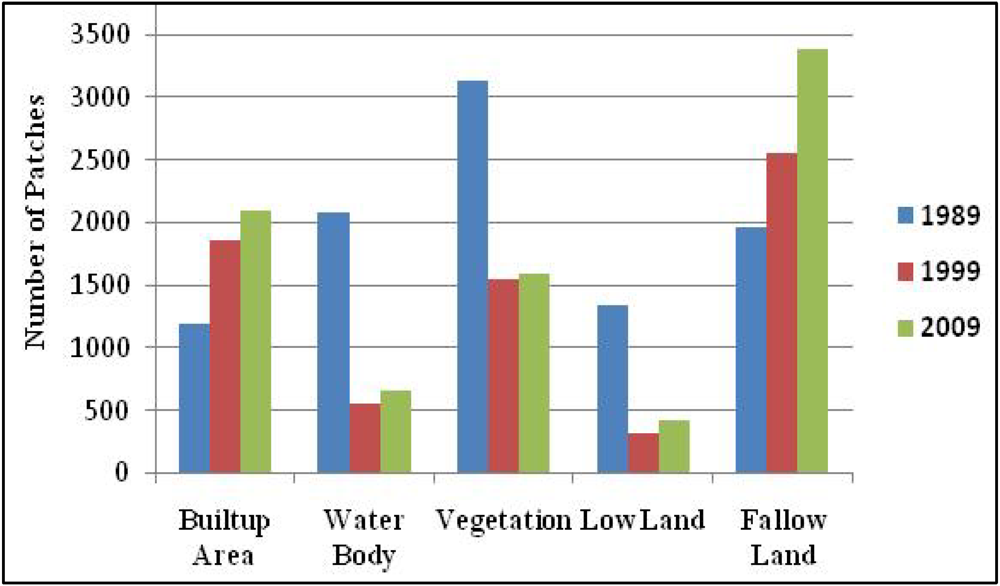
شکل 3. تعداد وصله ها در طول سالها.
3.1.2. سود و زیان در انواع پوشش زمین
در مورد منطقه ساخته شده، بخش جنوبی مرکز شهر داکا به همان شکل باقی مانده است. در حالی که قسمت های شمال شرقی و جنوب غربی به مناطق مسکونی تبدیل شده اند. بخش شمالی شهر داکا دارای آب است و به دنبال آن کاهش شدید در بخش های جنوب شرقی و جنوب غربی ( شکل 4 ).
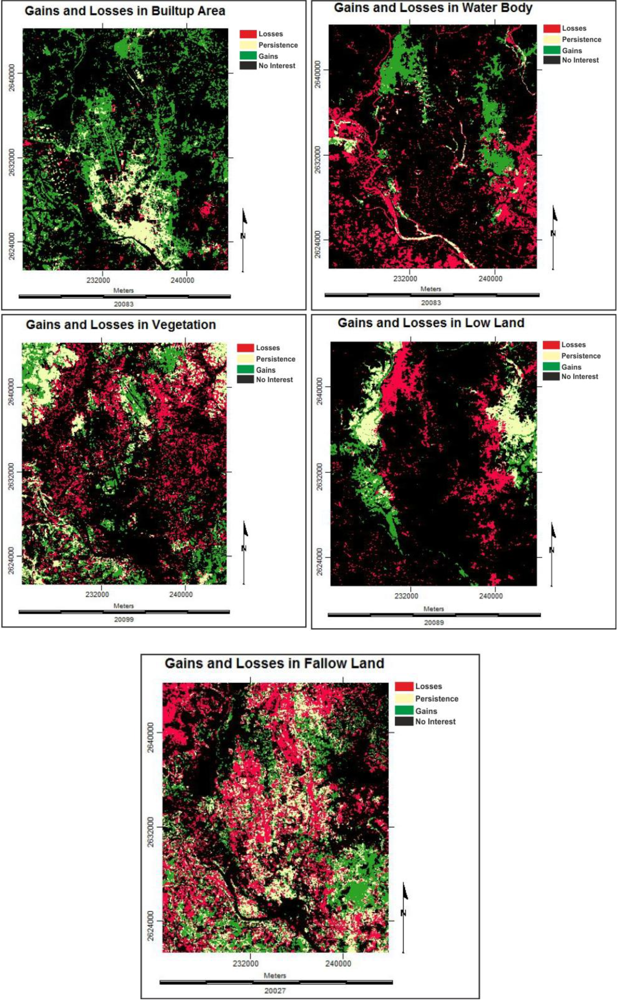
شکل 4. سود و زیان در انواع پوشش زمین (1989-2009).
هیچ الگوی خاصی در مورد سود یا زیان برای پوشش گیاهی یافت نشد. در مناطق پست، تغییرات در بخش های شرقی و غربی مشهود است. زمین های آیش به طور قابل توجهی کاهش یافته است و تلفات در بخش های شمال غربی و میانی واضح است ( شکل 4 ).
3.2. مدل مارکوف تصادفی
اولین مدلی که پیاده سازی شده است به عنوان “مدل مارکوف تصادفی (St_Markov)” نامگذاری شده است، زیرا این مدل هر دو فرآیندهای تصادفی و همچنین تکنیک های تحلیل زنجیره مارکوف را ترکیب می کند [ 17 ]. این نوع مدلسازی تغییر پوشش زمین زمانی مناسب است که روند گذشته الگوی تغییر پوشش زمین مشخص باشد [ 12 ].
یک زنجیره مارکوف یک فرآیند تصادفی (بر اساس احتمالات) با فضای حالت گسسته و فضای پارامتر گسسته یا پیوسته است [ 18 ]. در این فرآیند تصادفی، وضعیت یک سیستم در زمان ( t+1 ) فقط به وضعیت سیستم در زمان t بستگی دارد ، نه به حالت های قبلی.
3.2.1. دارایی مارکوف
در زنجیره مارکوف، احتمال حالت بعدی فقط به وضعیت فعلی بستگی دارد. این ویژگی مارکوف نامیده می شود و به صورت [ 19 ] بیان می شود:
 (1)
(1)احتمال یک زنجیره مارکوف ξ 1 , ξ 2 ,……… را می توان به صورت [ 19 ] محاسبه کرد:
 (2)
(2)احتمالات مشروط:
 (3)
(3)اینها “احتمالات انتقال” زنجیره مارکوف [ 19 ] نامیده می شوند.
3.2.2. ماتریس انتقال برای زنجیره مارکوف
بیایید یک زنجیره مارکوف با n حالت s 1 , s 2 ,…….,s n در نظر بگیریم . فرض کنید p ij نشان دهنده احتمال انتقال از حالت s i به حالت s j باشد ، یعنی .
 (4)
(4)سپس ماتریس انتقال (n×n) این فرآیند مارکوف به صورت [ 19 ] تعریف میشود:
 (5)
(5)پیشبینیهای احتمالات حالت آینده را میتوان با حل معادله ماتریس [ 19 ] محاسبه کرد:
p(t) = p(t − 1)∙P (6)
با افزایش مراحل زمانی، یک زنجیره مارکوف ممکن است به یک بردار احتمال حالت ثابت نزدیک شود که به آن توزیع محدود میگویند [ 19 ]:
p(∞) = = ∙P t (7) 


3.2.3. تحلیل با مدل مارکوف تصادفی
در ابتدا، زنجیره مارکوف با تجزیه و تحلیل دو تصویر کیفی پوشش زمین ( شکل 5 ) از دو تاریخ مختلف 1989 و 1999 ، یک ماتریس انتقال ( جدول 8 )، یک ماتریس مناطق انتقالی ( جدول 9 ) و مجموعه ای از تصاویر احتمال شرطی تولید می کند [ 12 ]. ].
جدول 8. احتمال تغییر مارکوف در میان انواع پوشش زمین (1989-1999).
جدول 9. انتظار می رود سلول ها به کلاس های مختلف منتقل شوند (1989-1999).
ماتریس احتمالات انتقال ( جدول 8 ) احتمال تغییر هر دسته پوشش زمین به دسته های دیگر را در سال 2009 نشان می دهد. جدول 9 تعداد سلول ها/پیکسل ها (30 متر × 30 متر) را نشان می دهد که در طول زمان از یک زمین تبدیل می شوند. نوع پوشش به انواع دیگر. تجزیه و تحلیل زنجیره مارکوف همچنین تصاویر احتمال شرطی مرتبط ( شکل 5 ) را با کمک ماتریس های احتمال انتقال تولید می کند. هر تصویر احتمال شرطی امکان انتقال به کلاس دیگر پوشش زمین را نشان می دهد.
پس از تجزیه و تحلیل شکل 5 ، واضح است که بیشتر مناطق به مناطق ساخته شده تبدیل می شوند. احتمال مشروط مارکوین برای ایجاد منطقه ساخته شده تا 0.66 است که بالاترین میزان در بین سایر انواع پوشش زمین است. این پیشبینی احتمالی به روند گذشته ده سال گذشته (1989-1999) وابسته است.
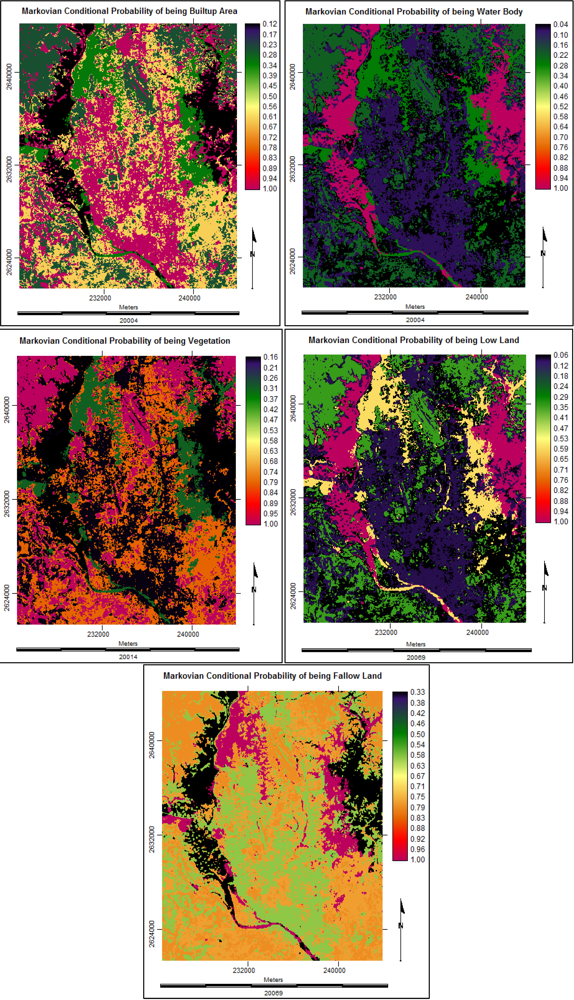
شکل 5. تصاویر احتمال شرطی مارکوین.
3.2.4. پیش بینی آینده با استفاده از مدل مارکوف تصادفی
گام بعدی ایجاد یک نقشه پوشش زمین برای پیش بینی آینده است که تمام تصاویر احتمال مشروط مارکو را جمع آوری می کند. این پیش بینی توسط یک مدل تصمیم گیری انتخاب تصادفی انجام می شود. انتخاب تصادفی با ارزیابی و تجمیع احتمالات مشروط که در آن هر پوشش زمین می تواند در هر مکان پیکسل در برابر توزیع تصادفی مستطیلی احتمالات وجود داشته باشد، یک نقشه پوشش زمین تصادفی ایجاد می کند [ 12 ].
انتخاب تصادفی با ارزیابی و جمعآوری احتمالات مشروط که در آن هر پوشش زمین میتواند در هر مکان پیکسل در برابر توزیع تصادفی مستطیلی احتمالات وجود داشته باشد، یک نقشه پوشش زمین تصادفی ایجاد میکند [ 12 ]. نقشه پوشش زمین پیش بینی شده Stochastic Markov (St_Markov) در سال 2009 در شکل 6 نشان داده شده است .
3.3. اتومات سلولی مدل مارکوف
مدل دومی که پیادهسازی شده است «مدل مارکوف خودکار سلولی» (CA_Markov) نام دارد. CA_Markov مفاهیم زنجیره مارکوف، اتوماتای سلولی (CA) [ 20 ]، ارزیابی چند معیاره [ 21 ] و تخصیص زمین چند هدفه [ 12 ] را ترکیب می کند.
استفان ولفرام CA را چنین تعریف کرد: ” اتوماتای سلولی ایده آل سازی های ریاضی ساده ای از سیستم های فیزیکی هستند که در آن فضا و زمان گسسته است و مقادیر فیزیکی مجموعه محدودی از مقادیر گسسته را می گیرند ” [ 22 ].
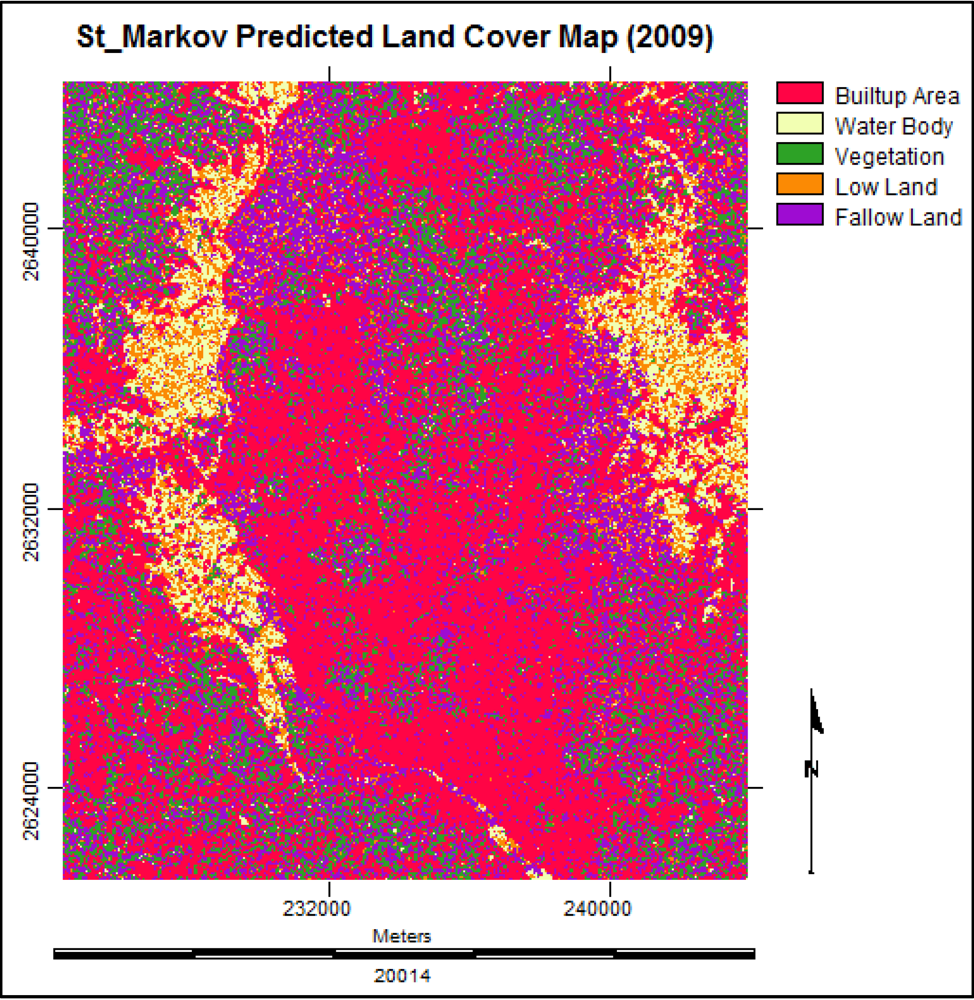
شکل 6. نهایی نقشه پوشش زمین پیش بینی شده توسط St_Markov (2009).
3.3.1. عناصر اتوماتای سلولی
اجزایی که یک اتومات سلولی ابتدایی را تشکیل می دهند به شرح زیر است [ 23 ]:
-
(الف) محیط فیزیکی یا فضایی که با آرایه ای از سلول ها نشان داده شده است، که خودکار روی آن وجود دارد (شبکه آن).
-
(ب) سلولی که اتومات در آن قرار دارد که شامل حالت(های) آن است.
-
(ج) محله اطراف خودکار.
-
(د) قوانین انتقال که رفتار خودکار را توصیف می کند.
-
(ه) فضای زمانی که خودکار در آن وجود دارد.
3.3.2. علامت گذاری ریاضی اتوماتای سلولی
یک مدل CA سیستم دینامیکی گسسته را نشان می دهد که از چهار عنصر تشکیل شده است [ 20 ]:
 (8)
(8)جایی که، L = شبکه گسسته یا محیط فیزیکی. ∑ = مجموعه ای از حالت های ممکن، که در آن هر سلول i شبکه در مرحله زمانی t دارای حالت σ i ( t) است ∑ ; = همسایگی یک خودکار سلولی، که به عنوان تمام سلول هایی که در شعاع r در اطراف سلول واقعی قرار می گیرند تعریف می شود. این ایده الگوی محله [ 24 ] را نشان می دهد:


 کجا ؛ = شاخص نسبی همه همسایگان یک سلول خاص. δ = قانون گذار محلی، که به صورت زیر نشان داده می شود [ 20 ]:
کجا ؛ = شاخص نسبی همه همسایگان یک سلول خاص. δ = قانون گذار محلی، که به صورت زیر نشان داده می شود [ 20 ]: 

 (9)
(9)نشان می دهد که وضعیت سلول i در مرحله زمانی بعدی t+1 با δ بر اساس حالات تمام سلول های همسایه آن در مرحله زمانی فعلی t محاسبه می شود.
در اینجا، i (t) = همسایگی مرتبط با سلول i در زمان t . | | = تعداد سلول های همسایه.
قانون گذار محلی توسط یک جدول قوانین داده می شود که در آن اندازه های ∑ و با توجه به تعداد کل قوانین ممکن برابر است [ 20 ]:
 (10)
(10)که در آن هر یک از |∑ N | پیکربندیهای احتمالی همسایگی یک سلول به تعداد حالتهای ممکنی که یک سلول میتواند در آن قرار گیرد نگاشت میشود. اکنون با در نظر گرفتن مجموعه مرتب تمام حالات همه سلولها در مرحله زمانی t ، پیکربندی سراسری یک CA را میتوان به صورت زیر نشان داد [ 20 ] :
 (11)
(11)اکنون با اعمال قانون گذار محلی برای تمام سلول های شبکه CA، پیکربندی بعدی CA را می توان با نقشه جهانی القایی آن محاسبه کرد [ 20 ]:
 (12)
(12)به طور خلاصه، CA استاندارد را می توان به صورت زیر تعمیم داد [ 24 ]:
 (13)
(13)که در آن، S = مجموعه ای از تمام حالت های ممکن اتوماتای سلولی. N = همسایگی از تمام سلول ها که مقادیر ورودی را برای تابع f و f = یک تابع انتقالی است که تغییر حالت را از t به t+1 تعریف می کند .
3.3.3. شبیه سازی با مدل مارکوف اتوماتای سلولی
CA_Markov برای مدل سازی وضعیت چندین دسته از یک سلول بر اساس ماتریس مناطق انتقال مارکوف مفید است. تصاویر مناسبت انتقالی و یک فیلتر مجاورت تعریف شده توسط کاربر. یک مدل مارکوف قانون مجاورت را اعمال می کند، مانند پیکسلی که نزدیک به یک منطقه شهری به احتمال زیاد به منطقه شهری تبدیل می شود [ 12 ]. در این تحقیق از فیلتر مجاورت میانگین 3×3 استفاده شده است ( شکل 7) برای هدف مدل سازی. این نوع فیلتر بر روی تصاویر مناسب برای هر طبقه پوشش زمین اعمال می شود. این یک محله تعریف شده است. مناسب بودن یک پیکسل با مقادیر پیکسل در این هسته فیلتر تعریف شده تعیین می شود. هرچه تعداد پیکسلهای یک دسته از پوشش زمین در همسایگی بیشتر باشد، ارزش مناسب برای آن نوع پوشش خاص بیشتر میشود. در غیر این صورت مقدار پیکسل ثابت می ماند [ 12 ].
شکل 7. فیلتر مجاورت میانگین 3 × 3 برای مدلسازی CA_Markov.
3.3.4. نقشه های مناسب برای کلاس های پوشش زمین
نقشههای تناسب تعیین میکنند که کدام پیکسلها مطابق با بالاترین تناسب هر نوع پوشش زمین تغییر میکنند. هرچه مناسب بودن یک پیکسل بیشتر باشد، امکان تغییر پیکسل های مجاور به آن کلاس خاص بیشتر می شود.
تهیه نقشه تناسب برای هر نوع پوشش زمین از نظر داده ها و اطلاعات در دسترس دشوار است. گنجاندن انواع عوامل یا محدودیت هایی که در منطقه مورد مطالعه وجود دارد امکان پذیر نیست. بنابراین یک فرض ساده برای استانداردسازی عامل فازی در نظر گرفته شده است.
فرض اساسی برای تهیه تصاویر مناسب این است که پیکسل نزدیکتر به یک نوع پوشش زمین موجود، تناسب بالاتری دارد. این بدان معناست که پیکسلی که کاملاً در پوشش گیاهی قرار دارد، دارای بالاترین ارزش مناسب (255) است و پیکسل های دور از پیکسل های گیاهی موجود، ارزش تناسب کمتری خواهند داشت. دورترین پیکسل ها از پوشش گیاهی کمترین مقادیر مناسب را نشان خواهند داد. در اینجا تناسب با فاصله کاهش می یابد. اگرچه این ایده همیشه کامل نیست، مانند مورد آب و پوشش گیاهی، سناریو می تواند متفاوت باشد. در واقعیت، یک پیکسل نزدیک به جنگل به احتمال زیاد به منطقه ساخته شده تبدیل می شود و نه در جنگل. اما این را می توان محدودیت تحقیق در نظر گرفت.
بنابراین یک تابع واپاشی فاصله خطی ساده برای این فرض اساسی مناسب است. در خدمت ایده اصلی مجاورت است. نقشه های پوشش زمین با استفاده از فرآیند تحلیل عضویت مجموعه فازی [ 12 ] به همان مقیاس تناسب پیوسته (0-255) استاندارد شده اند ( شکل 8 ) .
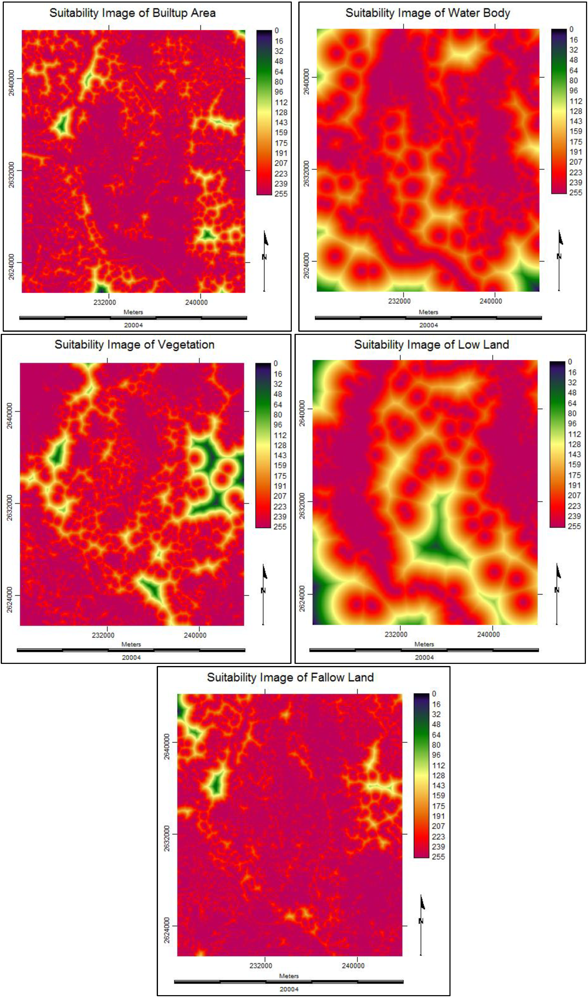
شکل 8. تصاویر مناسب بودن هر نوع پوشش زمین (1999).
3.3.5. پیش بینی آینده با استفاده از مدل مارکوف اتوماتای سلولی
در پایان، ماتریس ناحیه انتقال مارکوف ( جدول 9 )، تمام تصاویر مناسب ( شکل 8 )، فیلتر مجاورت CA 3 × 3 ( شکل 7 ) و نقشه پایه شهر داکا (1999) برای پیش بینی استفاده شده است. نقشه پوشش زمین در سال 2009. تصویر نهایی پوشش زمین (2009) CA_Markov پیش بینی شده از شهر داکا در شکل 9 نشان داده شده است .
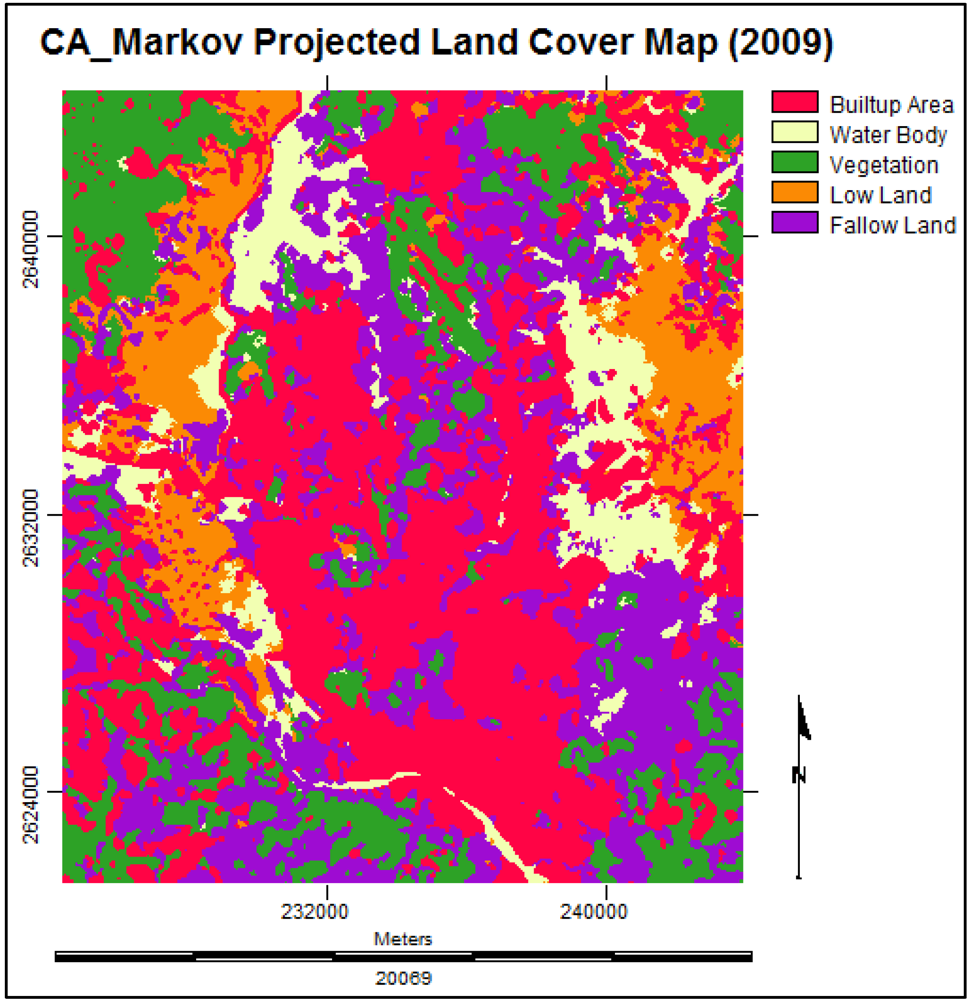
شکل 9. CA_Markov نقشه پوشش زمین شهر داکا (2009) را پیش بینی کرد.
3.4. مدل مارکوف پرسپترون چند لایه
اصطلاح “شبکه عصبی مصنوعی (ANN)” از سیستم عصبی بیولوژیکی انسان الهام گرفته شده است [ 25 ]. در یک مدل ANN معمولی، گره های ساده به یکدیگر متصل می شوند تا شبکه ای از گره ها را تشکیل دهند. برخی از این گره ها، گره های ورودی نامیده می شوند. برخی گره های خروجی هستند و در بین آنها گره های پنهان وجود دارد [ 26 ]. پرسپترون چند لایه (MLP) یک شبکه عصبی پیشخور با یک یا چند لایه بین لایه های ورودی و خروجی است. مزیت بزرگ استفاده از شبکه عصبی پرسپترون MLP این است که فرصت مدلسازی چندین یا حتی همه انتقالها را بهطور همزمان میدهد [ 12 ].
3.4.1. مفهوم پیشروی شبکه عصبی پرسپترون چند لایه
شبکه عصبی MLP از الگوریتم پس انتشار (BP) استفاده می کند. این محاسبه بر اساس اطلاعات سایت های آموزشی است [ 12 ]. انتشار به عقب شامل دو مرحله اصلی، انتشار به جلو و عقب است. ورودی ای که یک گره دریافت می کند به صورت زیر وزن می شود:
 (14)
(14)جایی که، w ij = وزن بین گره i و گره j. O i = خروجی از گره i
خروجی یک گره j به صورت [ 26 ] محاسبه می شود:
 (15)
(15)f = یک تابع سیگموئید غیر خطی که قبل از عبور سیگنال به لایه بعدی، به مجموع وزنی ورودی ها اعمال می شود.
این به عنوان “انتشار رو به جلو” شناخته می شود. پس از اتمام، فعالیت های گره های خروجی با فعالیت های مورد انتظار آنها مقایسه می شود. در شرایط عادی، خروجی شبکه با خروجی مورد نظر (مجموعه ای از داده های آموزشی، به عنوان مثال، کلاس های شناخته شده) متفاوت است. این تفاوت به عنوان خطا در شبکه نامیده می شود [ 26 ]. سپس خطا از طریق شبکه منتشر می شود. اکنون وزن اتصالات به صورت زیر تصحیح می شود [ 12 ]:
 (16)
(16)η = پارامتر نرخ یادگیری. δj = شاخصی از نرخ تغییر خطا. α = پارامتر تکانه.
فرآیند انتشار به جلو و عقب به طور مکرر تکرار می شود، تا زمانی که خطاهای شبکه به حداقل برسد یا به بزرگی قابل قبول برسد [ 26 ]. هدف از آموزش شبکه بدست آوردن وزن مناسب هم برای ارتباط بین لایه ورودی و پنهان و هم بین لایه مخفی و خروجی برای طبقه بندی پیکسل های ناشناخته است [ 12 ]. عوامل متعددی بر قابلیت های شبکه عصبی برای تعمیم تأثیر می گذارد [ 26 ]. این شامل:
3.4.2. تعداد گره ها
به طور کلی، هرچه تعداد گرهها در لایه پنهان بیشتر باشد، شبکه عصبی دادههای آموزشی را بهتر نشان میدهد [ 26 ]. تعداد گره های لایه پنهان با معادله زیر [ 12 ] تخمین زده می شود:
 (17)
(17)که در آن، N h = تعداد گره های پنهان. N i = تعداد گره های ورودی. N o = تعداد گره های خروجی
3.4.3. تعداد نمونه های آموزشی و تکرار
تعداد نمونه های آموزشی نیز بر دقت تمرین تاثیر می گذارد. نمونه های بسیار کم ممکن است الگوی هر دسته را نشان ندهند در حالی که تعداد بسیار زیاد نمونه ممکن است باعث همپوشانی شوند. دوباره تکرارهای زیاد می تواند باعث آموزش بیش از حد شود که ممکن است باعث تعمیم ضعیف شبکه شود [ 12 ]. با توقف زودهنگام تمرین می توان از تمرین بیش از حد جلوگیری کرد [ 25 ]. میزان خطای قابل قبول بر اساس خطای میانگین مربعات ریشه (RMS) [ 25 ] ارزیابی می شود:
 (18)
(18)که در آن، N = تعداد عناصر. i = شاخص عناصر. e i = خطای عنصر ith. t i = مقدار هدف (اندازه گیری شده) برای عنصر i . a i = مقدار محاسبه شده برای عنصر i .
3.4.4. مدلسازی مارکوف پرسپترون چند لایه
مفهوم اصلی مدلسازی با شبکه عصبی MLP که در این تحقیق اتخاذ شده است، در نظر گرفتن تغییر در ناحیه ساخته شده در طول سالها است. به طور کلی، به این معنی است که سایر انواع پوشش زمین در درجه اول به افزایش مساحت ساخته شده کمک می کنند. در این مرحله، این موضوع که کدام متغیرها بر تغییر منطقه ساخته شده (1999-1989) تأثیر میگذارند، در نظر گرفته شده است. بنابراین، برای شبیهسازی مدل، تنها انتقال از «آب به منطقه ساختهشده»، «پوشش گیاهی به منطقه ساختهشده»، «زمین پست به منطقه ساختهشده» و «زمین آیش به منطقه ساختهشده» در نظر گرفته شده است. . این چهار انتقال در اینجا به عنوان “همه” نامگذاری شده اند. شکل 10 انتقال از کل به منطقه ساخته شده را نشان می دهد.
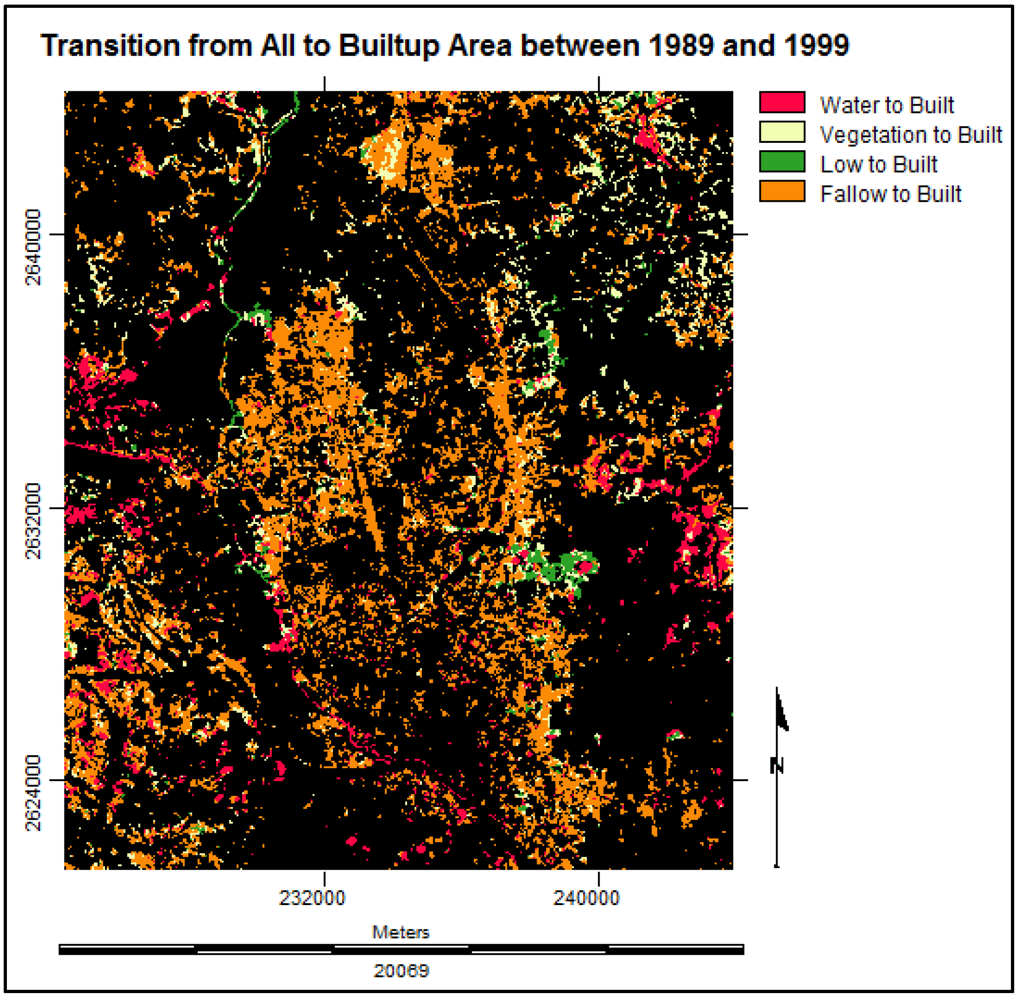
شکل 10. انتقال از همه به منطقه ساخته شده (1989-1999).
منطقی است که مناطق جدید به مناطق ساخته شده تبدیل شوند که در آن مناطق ساخته شده موجود وجود دارد. بنابراین شش متغیر محرک برای مدلسازی MLP_Markov انتخاب شده است. اینها عبارتند از (1989-1999): فاصله از همه تا منطقه ساخته شده، فاصله از بدنه آبی، فاصله از پوشش گیاهی، فاصله از زمین پست، فاصله از زمین آیش و تصویر احتمال تجربی).
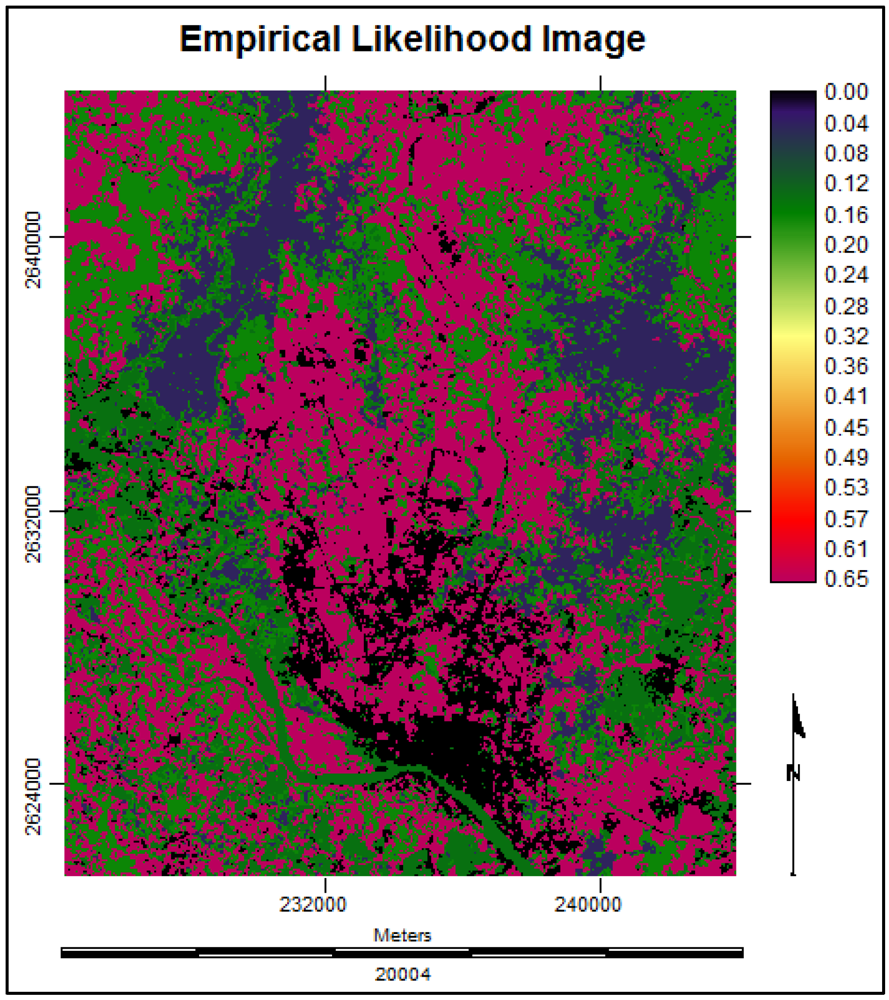
تبدیل احتمال تجربی ابزار موثری برای ترکیب متغیرهای طبقه بندی شده در تجزیه و تحلیل است ( شکل 11 ). این با تعیین فراوانی نسبی انواع مختلف پوشش زمین در مناطق انتقال (1989 تا 1999) تولید شده است. اعداد (افسانه) احتمال تغییر به منطقه ساخته شده را نشان می دهد. هر چه مقدار بیشتر باشد، احتمال تغییر پیکسل به نوع پوشش داخلی بیشتر است.
اکنون مهم است که توان توضیحی بالقوه هر متغیر را آزمایش کنیم. معیارهای کمی متغیرها از طریق Cramer’s V [ 27 ] آزمایش شده است. پیشنهاد می شود که متغیرهایی که دارای V Cramer در حدود 0.15 یا بالاتر هستند مفید هستند در حالی که متغیرهایی با مقادیر 0.4 یا بالاتر خوب هستند [ 12 ].
پس از بدست آوردن مقادیر V رضایت بخش Cramer برای همه متغیرهای محرک، اکنون نوبت اجرای مدل شبکه عصبی MLP است. برای این منظور 10000 تکرار انتخاب شده است. حداقل تعداد سلول هایی که از سال 1989 به 1999 منتقل شده اند 4794 است. بنابراین حداکثر حجم نمونه 4794 انتخاب شده است. برای هر انتقال اصلی وزن های خاصی باید به دست آید. منحنی خطای RMS پس از اجرای شبکه عصبی MLP صاف و نزولی پیدا کرده است. پس از تمام این ترکیبات، آمار در حال اجرا MLP میزان دقت بسیار بالایی 91.36٪ را ارائه می دهد (این دقت معیاری برای کالیبراسیون است، نه اعتبار سنجی). بر اساس این آمار در حال اجرا، نقشه های پتانسیل انتقال تولید شده اند ( شکل 12). این نقشهها، برای هر مکان، پتانسیلی را که برای هر یک از انتقالهای مدلسازی شده دارد، نشان میدهند [ 12 ]. اینها نقشه های احتمالی نیستند که مجموع مقادیر برای یک مکان پیکسل خاص 1 نباشد. دلیل این امر این است که خروجی های شبکه عصبی MLP با اعمال مجموعه فازی به سیگنال ها به مقادیر 0 تا 1 با تابع فعال سازی به دست می آیند. (سیگموئید). در اینجا مقادیر بالاتر نشان دهنده درجه بالاتری از عضویت برای آن نوع پوشش زمین مربوطه است [ 12 ].
شکل 11. تصویر احتمال تجربی تغییر به مناطق ساخته شده (1989-1999).
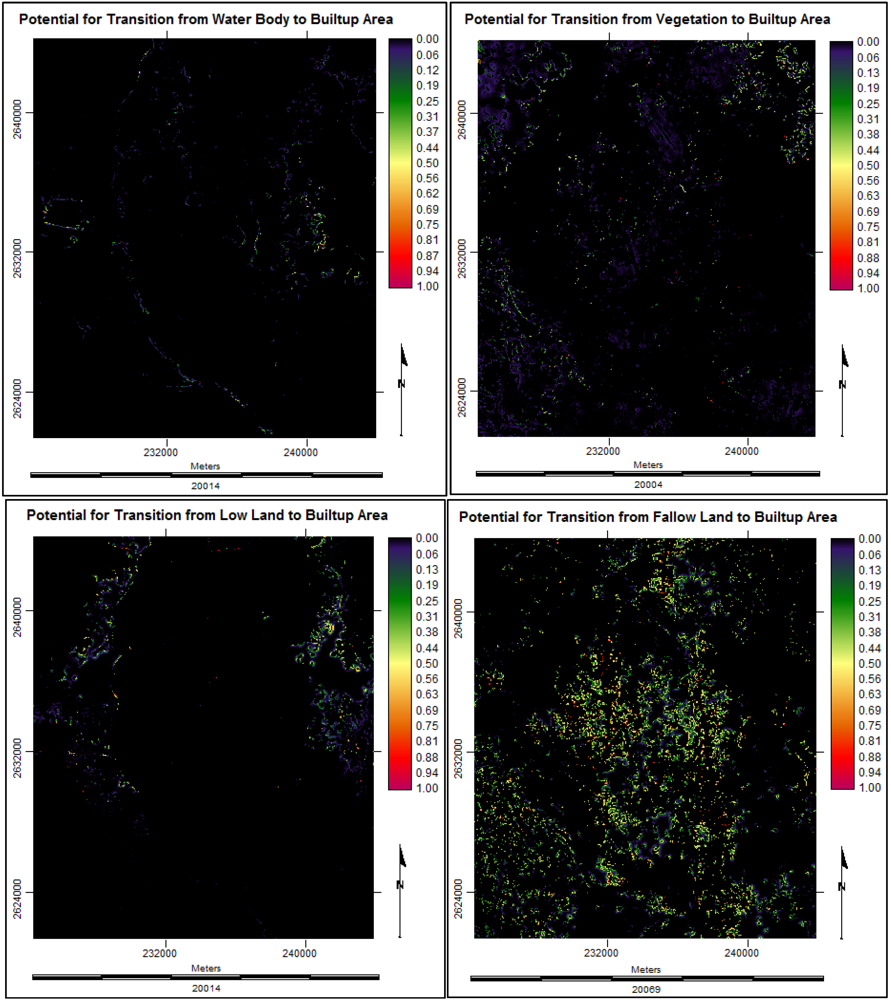
شکل 12. نقشه های پتانسیل انتقال از همه به منطقه ساخته شده (1989 تا 1999).
3.4.5. پیش بینی آینده با استفاده از مدل مارکوف پرسپترون چند لایه
با استفاده از این نوع تحلیل شبکه عصبی MLP می توان وزن انتقال هایی را که در ماتریس احتمالات زنجیره مارکوف برای پیش بینی آینده گنجانده می شود، تعیین کرد. احتمالات انتقال در جدول 10 نشان داده شده است. بر اساس تمامی این اطلاعات از شبکه عصبی MLP، نقشه نهایی پوشش زمین در سال 2009 ( شکل 13 ) از طریق تحلیل زنجیره مارکوف شبیه سازی شده است. کل فرآیند پیشبینی نقشه پوشش زمین از این طریق، مدل «MLP_Markov» نامیده میشود.

شکل 13. نقشه پوشش زمین شهر داکا (2009) توسط MLP_Markov پیش بینی شده است.
جدول 10. شبکه احتمالات انتقال برای زنجیره مارکوف (1989 تا 1999) در مدل سازی MLP.
3.5. اعتبارسنجی و انتخاب مدل
اکنون وظیفه انتخاب مناسب ترین مدل است. به طور کلی، اعتبارسنجی مدل به مقایسه نقشه های شبیه سازی شده و مرجع اشاره دارد. اما روش سنتی اعتبارسنجی یک مدل یا مقایسه دو نقشه، با استفاده از آمار کاپا، اکنون قدیمی شده است [ 28 ، 29 ].
بنابراین، روشی برای مقایسه سه نقشه (نقشه مرجع زمان 1، نقشه مرجع زمان 2 و نقشه شبیه سازی زمان 2) برای اعتبارسنجی مدل [ 30 ] اجرا شده است. در این مورد؛ از نقشه پایه 1999، نقشه پایه 2009 و نقشه های شبیه سازی شده زمان 2009 (St_Markov، CA_Markov و MLP_Markov) استفاده شده است.
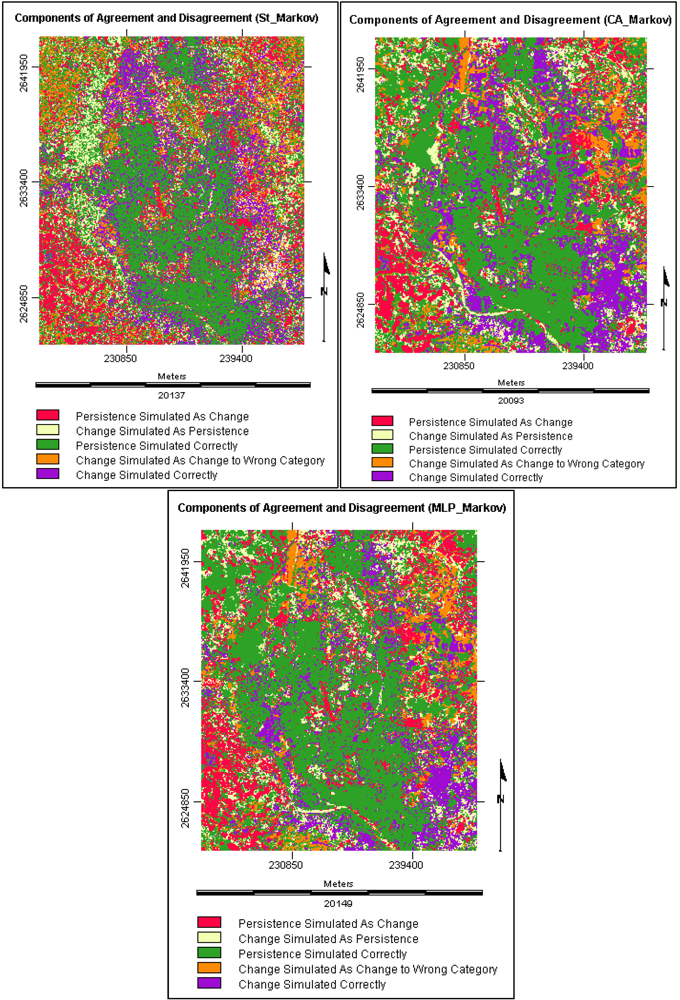
3.5.1. اجزای توافق و عدم توافق
روش مقایسه سه نقشه شامل دو مولفه توافق و سه مولفه عدم توافق است. اجزای توافق عبارتند از تداوم شبیه سازی شده به درستی و تغییر شبیه سازی شده به درستی [ 30 ]. مولفه های عدم توافق عبارتند از تغییر شبیه سازی شده به عنوان تداوم (ورودی هایی که مرجع t1 با شبیه سازی t2 مطابقت دارد اما با مرجع t2 مطابقت ندارد)، تداوم شبیه سازی شده به عنوان تغییر (مدخل هایی که مرجع t1 با مرجع t2 مطابقت دارد اما با شبیه سازی t2 مطابقت ندارد) و تغییر شبیه سازی شده به عنوان به دسته اشتباه تغییر دهید (مدخل هایی که هر سه نقشه با هم موافق نیستند) [ 30 ].
3.5.2. نتایج اعتبار سنجی
در بین این سه مدل، درصد مؤلفههای اختلاف کمترین (28.066 درصد) است در حالی که درصد مؤلفههای توافق (71.934 درصد) برای MLP_Markov ( جدول 11 ) بالاترین میزان است.
جدول 11. اجزای توافق و عدم توافق برای اعتبارسنجی مدل.
بدین ترتیب با اجرای روش مقایسه سه نقشه مشخص میشود که نقشه شبیهسازیشده «MLP_Markov 2009» بهترین نتایج را از نظر درصد مولفههای عدم توافق و توافق نشان میدهد. به این دلیل؛ MLP_Markov بهترین خروجی ها را در بین سه تکنیک مدل سازی ارائه می دهد.
شکل 14 نتایج حاصل از همپوشانی سه نقشه را نشان می دهد (نقشه پایه 1999، نقشه پایه 2009 و نقشه های شبیه سازی شده زمان St_Markov/CA_Markov/MLP_Markov در سال 2009). از این شکل می توان در مورد مولفه های توافق و عدم توافق نظر روشنی به دست آورد.
علاوه بر این، اگر به جدول 12 نگاه کنیم ، مشخص می شود که مدل MLP_Markov از تمام عناصر اساسی مدل سازی تشکیل شده است. اما مدل St_Markov فاقد اکثر عناصر است، در حالی که CA_Markov در وضعیت نسبتاً بهتری قرار دارد.
بنابراین در پایان مدل MLP_Markov برای پیش بینی نقشه پوشش زمین شهر داکا برای سال 2019 انتخاب شده است.
جدول 12. مقایسه سه مدل بر اساس عناصر مدل سازی پایه.
شکل 14. نقشه مولفه های توافق و عدم توافق.
3.6. شبیه سازی نقشه پوشش زمین سال 2019
برای پیش بینی نقشه پوشش زمین در سال 2019 از نقشه های پایه 1999 و 2009 استفاده شده است ( شکل 15 ). روشی که در اینجا دنبال می شود همان است که در بخش مدل سازی MLP_Markov بیان شده است.
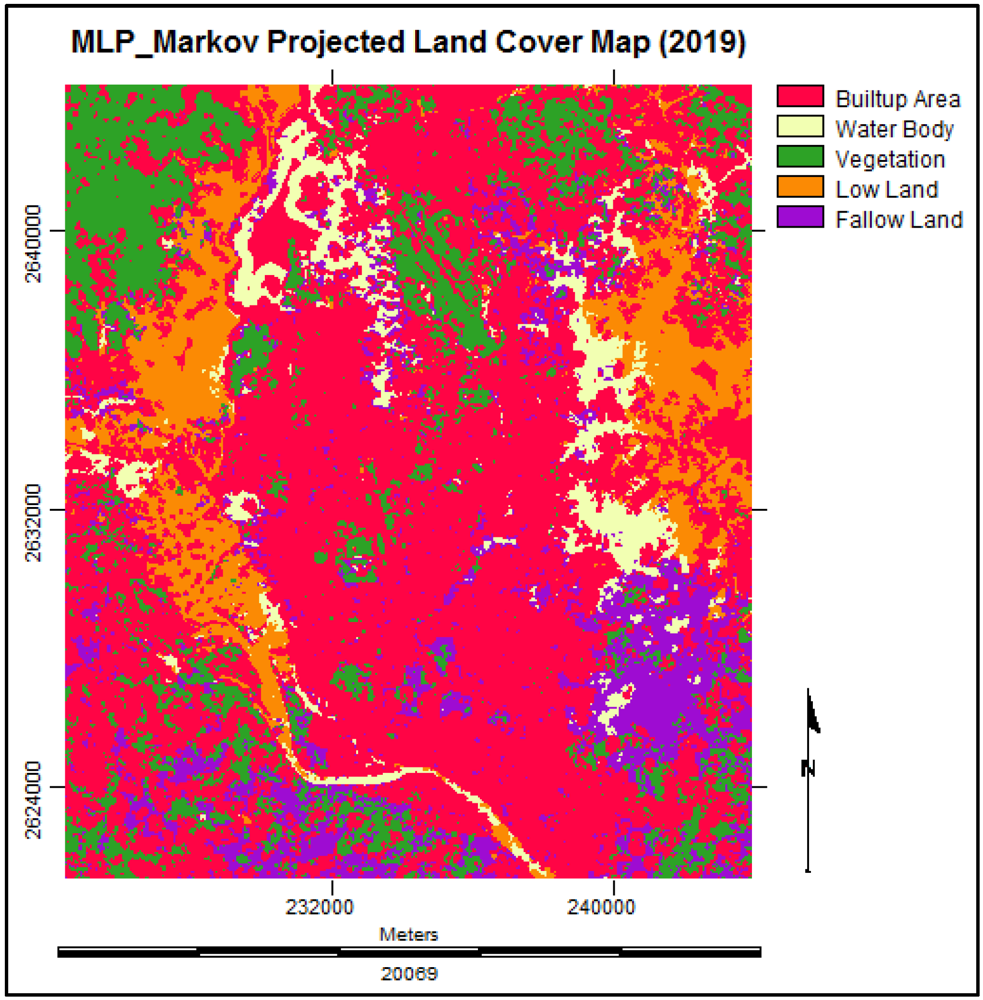
شکل 15. نقشه پوشش زمین شهر داکا (2019) توسط MLP_Markov پیش بینی شده است.
3.7. تجزیه و تحلیل نقشه نهایی پیش بینی شده (2019)
نقشه پیشبینیشده سال 2019 نشان میدهد که 58 درصد از کل مساحت توسط نوع پوشش «مساحت ساختهشده» اشغال خواهد شد ( شکل 16 ). از سوی دیگر، نوع آب (6 درصد) و زمین آیش (11 درصد) به میزان قابل توجهی کاهش می یابد.
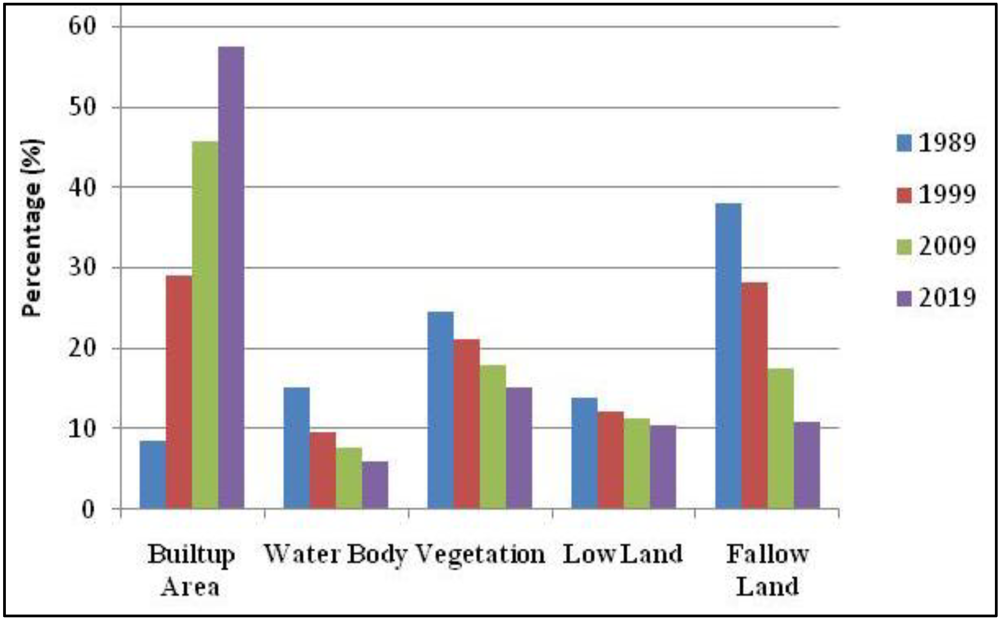
شکل 16. درصد حضور انواع پوشش زمین در طول سال ها (1989-2019).
4. نتیجه گیری
این تحقیق نشان داده است که افزایش مساحت ساخته شده در شهر داکا در طول سال ها (1989-2009) برجسته است. در ادامه این مقاله سه روش مختلف را برای شبیهسازی نقشه پوشش اراضی سال 2009 ارائه کرده است که با ویژگیهای تغییر ذاتی پایدار است. روشها بهعنوان مدل «مارکف تصادفی (St_Markov)»، «اتوماتای سلولی مارکوف (CA_Markov)» و «مدل پرسپترون چند لایه مارکوف (MLP_Markov)» نامگذاری شدهاند. سپس مدل MLP_Markov بر اساس روش مقایسه سه نقشه، مناسبترین مدل برای پیشبینی آینده (نقشه پوشش زمین 2019) است.
اگر خطا در نقشه های پایه تا جایی کاهش یابد که خطا از تغییر ظاهری زمین کمتر شود، امید ما ممکن است محقق شود. ما امیدواریم که تفسیر به تصویر کشیدن سناریوی آینده در حسابهای کمی، همانطور که در این تحقیق نشان داده شد، برای برنامهریزیهای شهری و تصمیمگیرندگان، برای برنامهریزی آینده یک شهر مدرن و قابل سکونت داکا، ارزش زیادی داشته باشد. علاوه بر این، اعتقاد ما بر این است که این نوع تحقیقات پتانسیل بالایی برای کمک به رشد شهری پایدار در هر سطح محلی و منطقهای در جهان دارد.
منابع
- Khan، NS نقشه برداری زمانی و تجزیه و تحلیل فضایی تغییر زمین به دلیل شهرنشینی و تأثیر آن بر سیستم آب های سطحی: موردی از منطقه شهری داکا، بنگلادش. بین المللی قوس. فتوگرام Remote Sens. 2000 , 33 , 598-605. [ Google Scholar ]
- لامبین، سنجش از دور EF و تجزیه و تحلیل GIS. در دایره المعارف بین المللی علوم اجتماعی و رفتاری ; Smelser، NJ، Baltes، PB، Eds. پرگامون: آکسفورد، انگلستان، 2001; ص 13150–13155. [ Google Scholar ]
- گریفیتس، پی. هاسترت، پ. گروبنر، او. Linden، SVD نقشهبرداری رشد مگا شهر با دادههای چند سنسوری. سنسور از راه دور محیط. 2010 ، 114 ، 426-439. [ Google Scholar ]
- دوان، AM; یاماگوچی، ی. تغییر کاربری زمین و پوشش زمین در داکای بزرگ، بنگلادش: استفاده از سنجش از دور برای ترویج شهرنشینی پایدار. Appl. Geogr. 2009 ، 29 ، 390-401. [ Google Scholar ]
- امچ، ام. پترسون، M. تغییر پوشش جنگلی حرا در سانداربان بنگلادش از سال 1989 تا 2000: رویکرد سنجش از دور. Geocarto Int. 2006 ، 21 ، 5-12. [ Google Scholar ]
- کاشم، MSB شبیه سازی دینامیک رشد شهری منطقه شهری داکا: رویکرد مبتنی بر اتوماتای سلولی. پایان نامه کارشناسی ارشد، گروه برنامه ریزی شهری و منطقه ای، دانشگاه مهندسی و فناوری بنگلادش (BUET)، داکا، بنگلادش، 2008. [ Google Scholar ]
- Lahti، J. مدلسازی رشد شهری با استفاده از اتوماتای سلولی: مطالعه موردی سیدنی، استرالیا. پایان نامه کارشناسی ارشد، علم اطلاعات جغرافیایی و رصد زمین برای مدلسازی و مدیریت محیطی، موسسه بینالمللی علوم اطلاعات جغرافیایی و رصد زمین، Enschede، هلند، 2008. [ Google Scholar ]
- Cabral1، P. زامیاتین، الف. سه مدل تغییر زمین برای تحلیل دینامیک شهری در منطقه سینترا-کاسکایس. در مجموعه مقالات اولین کارگاه EARseL سنجش از دور شهری SIG، دانشگاه Humboldt zu برلین، آلمان، 2 تا 3 مارس 2006.
- وانگ، جی. Mountrakis، G. توسعه یک مدل شهرنشینی چند شبکه ای (MuNU): مطالعه موردی رشد شهری در دنور، کلرادو. بین المللی J. GIS 2011 ، 25 ، 229-253. [ Google Scholar ]
- چنگ، جی. Masser، I. مدل سازی الگوی رشد شهری: مطالعه موردی شهر ووهان، روابط عمومی چین. طرح شهری منظر. 2003 ، 62 ، 199-217. [ Google Scholar ]
- احمد، بی. حسن، ر. احمد، اس. مطالعه موردی تغییر مورفولوژیکی چهار بخش شهر داکا در 60 سال گذشته (1947-2007). پایان نامه کارشناسی، گروه برنامه ریزی شهری و منطقه ای، دانشگاه مهندسی و فناوری بنگلادش (BUET)، داکا، بنگلادش، 2008. [ Google Scholar ]
- Eastman, JR IDRISI Taiga راهنمای GIS و پردازش تصویر. نسخه دستی 16.02 ; آزمایشگاه های کلارک: ورسستر، MA، ایالات متحده آمریکا، 2009. [ Google Scholar ]
- Congalton, R. مروری بر ارزیابی دقت طبقه بندی داده های سنجش از دور. سنسور از راه دور محیط. 1991 ، 37 ، 35-46. [ Google Scholar ]
- ERDAS IMAGINE 9.1. سیستم راهنمایی آنلاین، تصویربرداری جغرافیایی ژئوسیستم لایکا، LLC: Norcross، GA، ایالات متحده آمریکا، 2006.
- Tewolde، MG; Cabral، P. تحلیل و مدلسازی گسترش شهری در آسمارا، اریتره. Remote Sens. 2011 , 3 , 2148–2165. [ Google Scholar ]
- مک گریگال، ک. کوشمن، SA; نیل، ام سی; Ene, E. FRAGSTATS: برنامه تحلیل الگوی فضایی برای نقشههای طبقهای . دانشگاه ماساچوست: Amherst، MA، USA، 2002. در دسترس آنلاین: http://www.umass.edu/landeco/research/fragstats/fragstats.html (در 1 اوت 2011 قابل دسترسی است).
- بشارین، GP; لانگویل، AN; Naumov, VA زندگی و کار AA Markov. برنامه جبر خطی. 2004 ، 386 ، 3-26. [ Google Scholar ] [ CrossRef ]
- مدل های زنجیره ای بالزتر، اچ. مارکوف برای پویایی پوشش گیاهی. Ecol. مدل. 2000 ، 126 ، 139-154. [ Google Scholar ]
- Weng، Q. تجزیه و تحلیل تغییر کاربری زمین در دلتای ژوجیانگ چین با استفاده از سنجش از دور ماهوارهای، GIS و مدلسازی تصادفی. جی. محیط زیست. مدیریت کنید. 2002 ، 64 ، 273-284. [ Google Scholar ]
- Maerivoet، S. Moor، BD سلولار اتوماتای مدل های ترافیک جاده ای. فیزیک Rep. 2005 , 419 , 1-64. [ Google Scholar ]
- Malczewski، J. تجزیه و تحلیل مناسب کاربری زمین مبتنی بر GIS: مروری انتقادی. برنامه طرح. 2004 ، 62 ، 3-65. [ Google Scholar ]
- Wolfram, S. مکانیک آماری اتوماتای سلولی. Rev. Mod. فیزیک 1983 ، 55 ، 601-644. [ Google Scholar ]
- باردو، جی. کاسانکو، م. مک کورمیک، ن. Lavalle، C. مدلسازی فرآیندهای فضایی پویا: شبیهسازی سناریوهای آینده شهری از طریق اتوماتای سلولی. طرح شهری منظر. 2003 ، 64 ، 145-160. [ Google Scholar ]
- لی، ایکس. بله، AGO مدلسازی توسعه شهری پایدار با ادغام اتوماتای سلولی محدود و GIS. بین المللی J. GIS 2000 ، 14 ، 131-152. [ Google Scholar ]
- کارول، سی. مقایسه بین مدلهای مبتنی بر شبکه عصبی و رگرسیون چندگانه برای تخمین کلروفیل. در انفورماتیک اکولوژیک ; Recknagel, F., Ed. Springer: برلین، آلمان، 2006; صص 309-323. [ Google Scholar ]
- اتکینسون، PM؛ Tatnall، ARL معرفی شبکه های عصبی در سنجش از دور. بین المللی J. Remote Sens. 1997 , 18 , 699-709. [ Google Scholar ]
- Cramér, H. روشهای تخمین. In Mathematical Methods of Statistics , 19th ed; فصل 33، انتشارات دانشگاه پرینستون: پرینستون، نیوجرسی، ایالات متحده آمریکا، 1999; صص 497-506. [ Google Scholar ]
- پونتیوس، آر جی، جونیور؛ میلونز، ام. مرگ بر کاپا: تولد اختلاف کمیت و اختلاف تخصیص برای ارزیابی دقت. بین المللی J. Remote Sens. 2011 ، 32 ، 4407-4429. [ Google Scholar ] [ CrossRef ]
- چن، اچ. ابزارهای تشخیصی Pontius, RJ, Jr. برای ارزیابی پیشبینی تغییر زمین فضایی در امتداد شیب متغیر توضیحی. محیط زیست منظره. 2010 ، 25 ، 1319-1331. [ Google Scholar ]
- پونتیوس، آر جی، جونیور؛ پیتابارام، اس. کاستلا، JC مقایسه سه نقشه با وضوح چندگانه: مطالعه موردی شبیهسازی تغییر زمین در منطقه چو دون، ویتنا. ان دانشیار صبح. Geogr. 2011 ، 101 ، 45-62. [ Google Scholar ]
© 2012 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution ( http://creativecommons.org/licenses/by/3.0/ ) توزیع شده است
بدون نظر