

چکیده
: این مقاله بررسی ابرهای نقطه جغرافیایی مرجع را ارائه می دهد. تمرکز، از یک سو، روی ویژگی هایی است که از خود فرآیند اندازه گیری منشأ می گیرند و ویژگی هایی که از پردازش ابر نقطه ای به دست می آیند. از سوی دیگر، رویکردهای پردازش ابرهای نقطه جغرافیایی مورد بررسی قرار میگیرند. این شامل ساختارهای داده، اما همچنین مفاهیم پردازش فضایی است. ما دسته بندی ویژگی ها را به سطوحی پیشنهاد می کنیم که میزان پردازش را منعکس می کند. ابرهای نقطه ای در بسیاری از رشته ها یافت می شوند، که در تطبیق پذیری ادبیات نشان دهنده ویژگی های خاص است.
بررسی ویژگی نقطه ; دسته بندی ویژگی ها ; تعریف محله ; ساختار داده های مکانی ; مفاهیم پردازش
1. مقدمه و انگیزه
با افزایش تصویربرداری الکترومغناطیسی پیشرفته در نقشه برداری و ژئوانفورماتیک، مجموعه داده های عظیمی تولید می شود. این داده ها نقاطی هستند که در فضای سه بعدی قرار دارند و ویژگی های روش اندازه گیری اعمال شده را نشان می دهند که می تواند فعال یا غیرفعال باشد و خواص مختلف امواج الکترومغناطیسی (اندازه گیری طیفی، زمان تشخیص و غیره ) را ثبت کند.). علاوه بر این، الگوریتمهایی برای محاسبه صفات مرتبه بالاتر (ویژگیها) به دادهها اعمال میشوند که توصیف این نقاط را بهبود میبخشد. از آنجایی که مجموعه داده های حاصل معمولاً حاوی میلیاردها نقطه هستند و الگوریتم های محاسباتی اغلب برای اجرا پیچیده هستند، مدیریت مناسب این مجموعه داده ها مورد نیاز است. این به طور کلی بستگی زیادی به برنامه هایی دارد که داده ها برای آنها استفاده می شود. این مقاله یک نمای کلی از رویکردهای مختلف مدیریت داده، مستقل از روش اکتساب و کاربرد ارائه می دهد. دسترسی فضایی، گسترش ویژگی ها و مفاهیم پردازش، از جمله استفاده از ذخیره سازی ثانویه در کنار حافظه دسترسی تصادفی، در نظر گرفته شده است.
در این مقاله، ابر نقطه به عنوان مجموعه ای از نقاط، P i , i = 1, …, n , تعبیه شده در فضای دکارتی سه بعدی تعریف می شود. اصطلاح “ابر” ماهیت سازمان نیافته مجموعه و انسجام فضایی آن را منعکس می کند، با این حال، با یک مرز نامشخص. یک ابر نقطه ارجاع داده شده در یک سیستم مختصات ثابت زمین، به عنوان مثال، یک سیستم زمین-مرکز، مانند WGS84 (سیستم ژئودتیک جهانی، 1984)، یا در یک طرح ریزی نقشه با یک بیضی مرجع مشخص، به عنوان مثال، UTM (مرکاتور عرضی جهانی) داده می شود. ). هر نقطه، P i دارای سه مختصات است، ( xi ، y i ، z i ) ⊤ ∈ R 3، اما ممکن است ویژگی های اضافی داشته باشد، a j,i ، با j = 1، …، m i ، تعداد ویژگی های نقطه i . یک ویژگی، a j ، ممکن است، به عنوان مثال، یکی از n x ، n y ، n z ، σ z ، r ، g ، b ، nIR باشد .، شبیه مولفه های برداری عادی، دقت ارتفاع و “رنگ” در چهار باند طیفی. برای تعریف یک بردار نرمال مستلزم این است که نقاط از سطوح پیوسته تکه ای نمونه برداری شوند، در این صورت، به طور کلی برای هر نقطه یک صفحه مماس وجود دارد. این صفحه مماس را می توان از روی نقاط تخمین زد و بردار نرمال جهت عمود بر آن است. ممکن است شرایطی بر ویژگی ها اعمال شود، به عنوان مثال، مجموع مجذور مؤلفه های بردار نرمال برابر با یک باشد. بردار واحد با طول یک مناسب است، زیرا بردار معمولی فقط باید جهت عمود بر صفحه مماس در نقطه را نشان دهد، در حالی که طول بردار معنی ندارد. بنابراین ، هر نقطه، P i یک بردار است، ( xi ، y i, z i , a 1, i , …, a mi,i ) ⊤ , با بعد 3 + m i , با معنی ثابت برای سه جزء اول یعنی مختصات نقطه. سایر اجزای بردار ممکن است برای نقاط مختلف ابر معنای متفاوتی داشته باشند. اگر یک ابر نقطه حاوی نقاطی از دو یا چند منبع باشد، به عنوان مثال، از کمپینهای مختلف کسب، پلتفرمها یا دستگاههای اندازهگیری، هر مجموعه از یک منبع میتواند مجموعهای از ویژگیهای خاص خود را داشته باشد، اگرچه همه نقاط در یک سیستم مختصات قرار دارند.
ابرهای نقطهای که توپوگرافی را توصیف میکنند میتوانند از اسکن لیزری، همبستگی تصویر، رادارگرامتری، توموگرافی SAR (رادار دیافراگم مصنوعی)، دوربینهای زمان پرواز (دوربینهای ToF) و صدای اکو چند پرتویی (MBES) تولید شوند. هیچ قراردادی برای تعریف مقیاس ابر نقطه ای وجود ندارد، به عنوان مثال، یک تصویر ممکن است داشته باشد، بلکه ممکن است یک فاصله نمونه برداری معمولی از نقاط بر روی منطقه توپوگرافی مورد نظر تعریف شود. بسته به روش اکتساب و پلتفرم، این فاصله نمونه برداری ممکن است به کوچکی چند سانتی متر باشد، مثلاً از اسکن لیزری زمینی، اما همچنین به اندازه چند صد متر، به عنوان مثال، ابرهای نقطه ای که توسط ارتفاع سنجی لیزری ماهواره ای به دست می آیند، باشد. جمع آوری داده های هوایی اغلب به ابرهایی با میلیاردها نقطه منجر می شود. ابرهای نقطه توپوگرافی ممکن است مناطق بزرگ تری را بپوشانند، از چند ده متر تا یک سیاره کامل.2 ، با چگالی 20 نقطه در متر مربع اسکن شد ، که منجر به 10 میلیارد نقطه [ 1 ] شد که شامل چند ویژگی اضافی برای هر نقطه میشود. در Mølhave و همکاران. [ 2 ]، پردازش 26 میلیارد نقطه ( x ، y ، z ) برای تولید مدل زمین شرح داده شده است. لی و همکاران [ 3 ] پردازش 70 میلیون نقطه را گزارش می دهد که بردار ویژگی حاوی بیش از 100 عنصر است. بنابراین، ساختارهای دادههای مکانی مناسب برای ابرهای نقطهای برای دسترسی و همچنین الگوریتمهای محلی برای پردازش دادههای نقطه مورد نیاز است.
ابرهای نقطه ارجاع داده شده مدل هایی از واقعیت هستند که به مکان خاصی مربوط می شوند (همانطور که مختصات آنها و مشخصات سیستم مختصات مورد استفاده ارائه می شود (به Altamimi و همکاران [ 4 ] اشاره می کنیم که در آن تحقق یک سیستم مرجع از طریق نقاط ثابت ( چارچوب مرجع) توضیح داده شده است. در مورد آنها، سیستم، سیستم مرجع بینالمللی زمینی کنونی (ITRS) و زمان خاص (همانطور که با زمان اکتساب آن داده میشود) است. بنابراین، ابرهای نقطهای را نمیتوان تنها برای تجسم یک صحنه استفاده کرد ( به عنوان مثال، [ 5])، بلکه برای استنتاج اطلاعات کمی. به عنوان مثال، فواصل بین نقاط شناسایی شده را می توان برای به دست آوردن ارتفاع یک زیرگذر یا برای اندازه گیری طول یک خط گسل اندازه گیری کرد. یک قدم جلوتر به تحلیل خودکار، از جمله طبقه بندی صحنه و مدل سازی هندسی، همچنین، اطلاعات آماری به عنوان توزیع زوایای شیب در یک حوضه ممکن است از نقاط با تجزیه و تحلیل بردارهای نرمال آنها به دست آید. البته در این مثال تنها نقاطی که به سطح زمین تعلق دارند قابل بررسی هستند و ویژگی بردار نرمال باید از قبل محاسبه شود.
ابرهای نقطه ای مورد استفاده در مهندسی معکوس و مدل سازی هندسی [ 6 ] اغلب توسط مثلث سازی فعال (اسکنرهای لیزری مثلثی) یا ماشین های اندازه گیری مختصات (CMM) به دست می آیند. صحنه معمولاً یک شی را نشان می دهد که باید مدل شود. نقاط از پس زمینه یا اشیاء دیگر قبل از تجزیه و تحلیل بیشتر حذف می شوند. مدل سازی اغلب با سطوح آزاد انجام می شود. در مقایسه، ابرهای نقطه مرجع جغرافیایی اغلب نیاز به اطلاعات معنایی بیشتری را برای مفید بودن دارند، زیرا ممکن است چندین شی از کلاسهای مختلف در صحنه باشند. در رباتیک، اصطلاح ابر نقطه ای، گاهی اوقات برای اشاره به مجموعه ای از نقاط پوشاننده یک جسم استفاده می شود. اصطلاح “ویژگی” ابر نقطه نیز برای توصیف ویژگی کل مجموعه نقطه استفاده می شود، یک شی از یک کلاس خاص. آن “ویژگی ها” با تخمین پارامترهای کل مجموعه [ 7 ] (به عنوان مثال، وسعت، برازش شکل) یا با شناسایی آن محاسبه می شوند.
ویژگیهای محاسباتی مجموعههای نقطهای نیز در تحلیل ابر نقطه مبتنی بر شی یافت میشود [ 8 ، 9 ]، که مفهومی دارد که ابتدا زیرمجموعههای همگن و متصل به مکان نقاط را خلاصه میکند ( یعنی تقسیمبندی) و سپس از این اطلاعات جمعآوری شده برای طبقه بندی. در مقابل، مقاله فعلی بر ویژگیهای نقاط منفرد متمرکز است.
در زمینه SDI (زیرساخت داده های مکانی)، توصیف رسمی و توزیع داده های جغرافیایی یک موضوع است. بازیابی ابرهای نقطه از یک مخزن در کراسبی و همکاران ارائه شده است. [ 10 ].
سهم این مقاله عبارت است از: (1) یک نمای کلی از ویژگی های مورد استفاده در پردازش ابرهای نقطه جغرافیایی مرجع. (ii) دسته بندی ویژگی ها؛ و iii) یک نمای کلی از ساختارهای داده و مدیریت ابر نقطه ارائه دهد. در بحث، ما همچنین به جای در نظر گرفتن یک مدل سطحی متشکل از وجوه مسطح یا منحنی به عنوان نمایش صحنه برای همه کاربردها، برای حفظ ابر نقطه به عنوان داده منبع استدلال می کنیم (نگاه کنید به [ 5 ] نیز).
مقاله بصورت زیر مرتب شده است. بخش 2 حقایق کلیدی روشهای کسب ابر نقطه را خلاصه میکند و ویژگیهای پیشنهادی در ادبیات را خلاصه میکند. در مرحله بعد، در بخش 3، یک نمای کلی از ساختارهای داده مورد استفاده برای ابرهای نقطه ای بزرگ به شکل پایدار و همچنین در طول پردازش ارائه می شود. در بخش 4، ما مرتبسازی ویژگیها را در دستهها پیشنهاد میکنیم و بیشتر در مورد پردازش ابر نقطهای بحث میکنیم.
2. آخرین هنر: ابرهای نقطه و ویژگی ها
2.1. دستیابی به ابرهای نقطه ای
روشهای اندازهگیری برای به دست آوردن ابرهای نقطهای از منظر آنچه برای هر نقطه اندازهگیری میشود، در نتیجه ویژگیمحور توصیف میشوند.
اصطلاح LiDAR مخفف “تشخیص نور و محدوده” است، اما Measures [ 11 ] پیشنهاد می کند که مخفف آن را به “Laser Identification, Detection, Analysis and Ranging” گسترش دهید، که نشان می دهد بیش از محدوده را می توان با LiDAR اندازه گیری کرد. یک سیگنال، چه پالسی یا مدوله شده پیوسته، منتشر می شود و تاخیر زمانی برای تشخیص پژواک آن اندازه گیری می شود. این از طریق سرعت نور به فاصله (دو طرفه) سنسور تا جسم و برگشت به آشکارساز تبدیل می شود. جهت انتشار در سیستم مختصات سنسور اندازه گیری می شود. همراه با جهت بیرونی پلت فرم (متحرک یا ایستا)، مکان بک پراکندگی را می توان در سیستم مختصات جهانی محاسبه کرد، بنابراین سه مختصات ( x ، y ، z ) را فراهم کرد.) ⊤ از طریق ارجاع جغرافیایی مستقیم [ 12 ]. در اسکن لیزری برگشت گسسته، همچنین معیاری از قدرت پراکندگی برگشتی اغلب به عنوان عدد دیجیتال (DN) ارائه میشود. از آنجایی که معنای فیزیکی این اندازه گیری اغلب ارائه نمی شود، مشخص نیست که آیا این به دامنه پیک یا انرژی کل پژواک اشاره دارد و آیا به صورت خطی مقیاس بندی شده است. روشی برای کالیبراسیون نسبی در Höfle و Pfeifer [ 13 ] ارائه شده است. این قدرت پراکندگی برگشتی را می توان با محدوده، احتمالاً با زاویه فرود و گاهی اوقات نیز با مقادیر مرجع نرمال کرد [ 14 ].
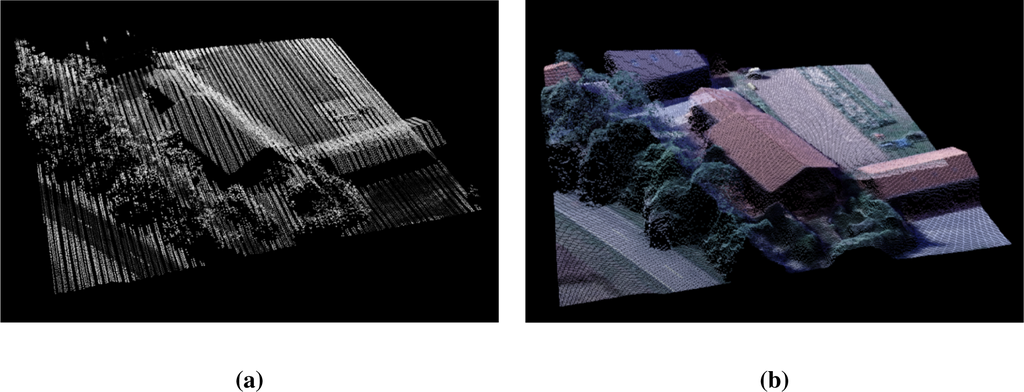
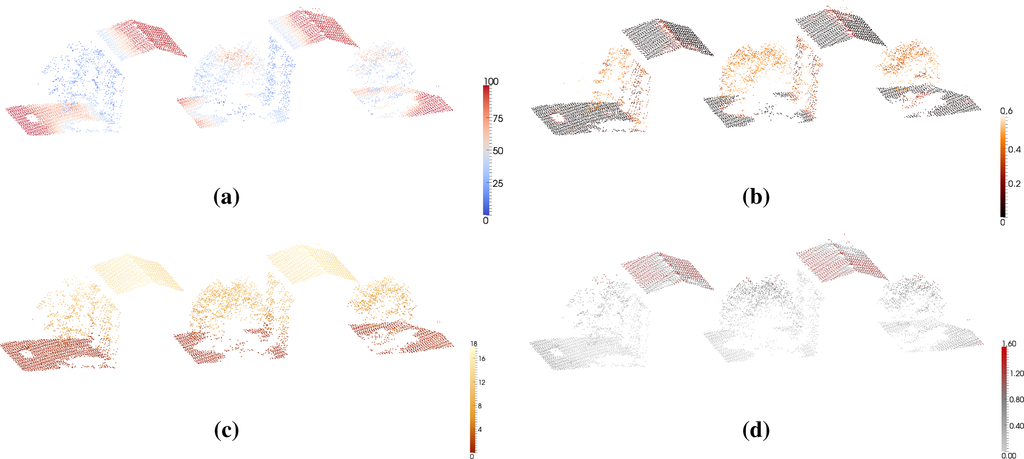
در اسکن لیزری شکل موج کامل، شکل پالس ساطع شده و پژواک دریافتی، معمولاً با فاصله نمونه برداری به ترتیب یک نانو ثانیه (ns) ثبت می شود. این امر از یک طرف امکان کالیبراسیون دقیق رادیومتری را فراهم می کند [ 15]، و از سوی دیگر، اندازه گیری های اضافی را ارائه می دهد که از شکل پژواک پس پراکنده به دست می آید. پارامترهای شکل موج “رادیومتریک” عبارتند از سطح مقطع پراکندگی برگشتی (طبیعی شده به ناحیه ردپا)، ضریب پراکندگی برگشتی و (نرمال بیشتر با زاویه برخورد و با فرض پراکندگی لامبرتی) بازتاب منتشر. این مقادیر به طول موج لیزر در حال استفاده اشاره دارد. پارامتر شکل موج “هندسی” پهنای اکو است که می تواند از شکل موج پژواک نمونه برداری شده، معمولاً عرض کامل در نصف حداکثر (FWHM) بازیابی شود. متناوبا، می توان آن را از مدلسازی شکل موج استخراج کرد، به عنوان مثال، توسط گاوسیان یا دیگر توابع پایه [ 16 ]. علاوه بر این، سایر پارامترهای شکل، به عنوان مثال، چولگی، پیشنهاد شد [ 17]. مقادیر رادیومتری بدون واحد هستند، در حالی که مقادیر هندسی یا بر حسب طول (m) یا زمان (ns) مشخص میشوند. پارامترهای شکل موج هندسی نه تنها به جسم، بلکه به شکل شکل موج ساطع شده نیز بستگی دارد. مقطع دیفرانسیل (به عنوان مثال، [ 18 ])، که با جداسازی شکل موج اکو با شکل موج گسیل شده به دست میآید، تنها به جسم بستگی دارد و مقادیر اضافی را مستقل از پارامترهای ماموریت ارائه میکند. برای سیستم های ردپای بزرگ، به عنوان مثال، ICESat (ماهواره یخ، ابر و زمین)، یک لیست جامع که پارامترهای شکل موج را توصیف می کند توسط Duong [ 19 ] ارائه شده است. مثالی که ابر نقطه ای را با دامنه شکل موج کامل ثبت شده نشان می دهد در شکل 1a آورده شده است.
نگاشت با تصاویر تک است، به این معنا که نقاط ( x ، y ، z ) ⊤ از محیط سه بعدی به یک تصویر دو بعدی نگاشت می شوند. بازسازی سه بعدی معمولاً با استفاده از بیش از یک تصویر از یک شی فعال می شود. اندازهگیریها، در مقایسه با اسکنرهای لیزری، مختصات محل انعکاس نور نیست، بلکه روشنایی (میزان نور بازتابشده) در آن نقطه است که توسط دوربین «دیده میشود» [ 20 ].]. مکان اندازه گیری با طرح پیکسل های حسگر تعیین می شود. بنابراین، نقاطی در رنگ یا تفاوت ارزش خاکستری (بافت) را می توان شناسایی کرد. همراه با جهتگیری بیرونی تصاویر، که مستقیماً اندازهگیری میشود یا با تنظیم بلوک بستهای به دست میآید، پرتو که در حال نقشهبرداری از نقطه از فضای شی به فضای تصویر است، بازسازی میشود. پرتوهای نقاط متناظر در چندین تصویر در نقطه شی (تقاطع جلو) قطع می شوند. این تقاطع رو به جلو بیش از حد تعیین شده است و بنابراین، یک ویژگی دقت می تواند استخراج شود. این اندازه گیری با تعداد پرتوهای مورد استفاده برای تقاطع قابل اطمینان تر می شود. رنگ ثبت شده نیز یک اندازه گیری است و بنابراین می تواند به یکی از ویژگی های نقطه تبدیل شود. کالیبراسیون رادیومتریک را می توان برای تصاویر دوربین های فتوگرامتری هوایی انجام داد [ 21]. این معمولاً سه یا چهار باند (قرمز، سبز، آبی، نزدیک به فروسرخ، مربوط به خواص فیلترها برای جداسازی باندهای طیفی)، اندازهگیری تابش در حسگر و با پردازش بیشتر، تخمین تابش جسم را ارائه میکند. . مقادیر ثبت شده یا محاسبه شده همگی به یک ویژگی نقطه شی اساسی بستگی دارند که تابع توزیع بازتاب دو جهته (BRDF, [ 22 ]) است. ابرهای نقطه ای با تطبیق متراکم جفت های تصویر (یا تصاویر بیشتر) به دست می آیند، به عنوان مثال، [ 23 ]. مثالی که ابر نقطه ای را از تصویر نیمه جهانی که با رنگ ثبت شده مطابقت دارد در شکل 1b نشان داده شده است . ارجاع جغرافیایی ابرهای نقطهای بهدستآمده از تطبیق تصویر بهطور غیرمستقیم توسط نقاط کنترل زمینی ارائه میشود (GCPs, [ 24])، مستقیماً با “ارجاع جغرافیایی مستقیم” [ 12 ، 25 ] یا با “ارجاع جغرافیایی یکپارچه”، بهره برداری از نقاط کنترل و مشاهدات مستقیم جهت بیرونی حسگر [ 26 ]. کیفیت رویکردهای مختلف در Heipke و همکاران بیشتر مورد بررسی قرار گرفته است. [ 27 ].
در حوزه مایکروویو طیف الکترومغناطیسی، از رادار دهانه مصنوعی (SAR) برای تصویربرداری از سطح زمین استفاده می شود. مشابه تصویربرداری عکاسی، این نقشه تکی است، اما اندازه گیری های متفاوتی را ارائه می دهد. بر روی شبکه آزیموت (در امتداد جهت پرواز) و برد (در سراسر جهت پرواز)، قدرت پراکندگی معکوس پیچیده، به عنوان مثال ، دامنه و فاز، ثبت می شود. SAR به طرفین نگاه می کند و بنابراین باعث کاهش دید سطوحی می شود که به سمت سنسور نیستند، به ویژه در مقایسه با اسکن لیزری هوا و تصویربرداری عکاسی. یک ابر نقطه ای را می توان با استفاده از یک جفت تصویر با خط پایه بزرگتر و شناسایی نقاط متناظر در تصویر دامنه، یعنی رادارگرامتری [ 28 ] از SAR به دست آورد.، 29 ]. در این مورد، قدرت بازتاب یک اندازه گیری اضافی است و به یک ویژگی نقطه تبدیل می شود، همانطور که کیفیت تقاطع در مورد تعیین بیش از حد است. روش دیگر، SAR توموگرافی را می توان برای ساخت یک دیافراگم مجازی در جهت z و در نتیجه، حل بعد سوم استفاده کرد [ 30 ]. این قدرت انعکاس را فراهم می کند، اما همچنین یک معیار انسجام برای هر نقطه را فراهم می کند.
صداگذاری پژواک میتواند ابرهای نقطهای را نیز فراهم کند، که مانند اسکن لیزری، برای تبدیل اندازهگیریها از سیستم مختصات حسگر به یک سیستم مختصات ثابت زمین، نیاز به ارجاع جغرافیایی مستقیم دارند. از طول موجهای متفاوتی استفاده میشود، و سیستمهای با طول موج دوگانه رایج هستند، با طول موجهای بزرگتر که اجازه نفوذ زمین نرم را میدهد، به عنوان مثال، گل در مقابل سنگ جامد. قدرت انعکاس نیز ممکن است ثبت شود و بنابراین، بردار ویژگی [ 31 ] غنی شود. پردازش ابر نقطه ای مجموعه داده های بزرگ MBES (صدای اکو چند پرتو) شرح داده شده است، به عنوان مثال، در Arge و همکاران. [ 32 ]. مورد ابرهای نقطه MBES بیشتر مورد بحث قرار نخواهد گرفت.
در سالهای اخیر، در دسترس بودن دوربینهای سه بعدی با نرخ فریم بالا، مانند دوربینهای ToF و Kinect، منجر به افزایش علاقه به پردازش و پردازش دادههای ابری نقطهای شده است. با این حال، به دلیل محدوده محدود آنها (معمولاً در حدود 0.5 متر تا 5 متر) و محدودیت در استفاده در فضای باز، ادبیات مربوط به ابرهای نقطه مرجع از آن دوربین های سه بعدی کمیاب است [ 33 ].
2.2. ویژگی های Point Cloud
در این بخش، استفاده از ویژگیها را از «رنگ» گرفته تا توصیف محلههای محلی بررسی میکنیم. در مقایسه با بخش 2.1، انتخاب ویژگی ها از نقطه نظر کاربردی به جای مبتنی بر ملاحظات فنی مربوط به اندازه گیری هدایت می شود.
رنگ یکی از ویژگی های یک نقطه است که اغلب در نمایش، تقسیم بندی و طبقه بندی استفاده می شود. وند و همکاران [ 34 ] ویرایش ابرهای نقطه ای عظیم (بیش از 2 × 10 9 ) را نشان می دهد که نه تنها موقعیت نقطه و رنگ RGB، بلکه بردار معمولی و اطلاعات فضای نمونه را نیز شامل می شود. برای مثال لیچتی [ 35 ] استفاده از قرمز، سبز، آبی و نزدیک به فروسرخ را برای طبقه بندی ابرهای نقطه ای پیشنهاد کرد. رنگ اندازه گیری اصلی در دوربین ها است، اما معمولاً این مقادیر کالیبره نمی شوند.
با کالیبراسیون، اندازهگیریهای اصلی ممکن است به ویژگیهای بهبود یافته نقطه تبدیل شوند، که بیشتر به فضای جسم مربوط میشوند و کمتر به مأموریت جمعآوری دادهها بستگی دارند. بریز و همکاران [ 36 ] ابرهای نقطه اسکن لیزری را ارائه کرد که در سه طول موج به دست آمده بودند، که کاملاً کالیبره شده اند. هوفل و همکاران [ 37 ] از بازتاب کالیبره شده برای طبقه بندی سطوح آب استفاده کنید. با LiDAR، همچنین، ویژگیهای شکل موج کامل را میتوان برای طبقهبندی پوشش گیاهی، پوشش زمین و صحنههای شهری، مانند عرض شکل موج، تعداد پژواکها و ضریب پراکندگی پسانداز، به عنوان مثال، [38-41] مورد بهرهبرداری قرار داد .]. به عنوان مثال، ضریب پراکندگی برگشتی و پهنای اکو، ویژگی هایی هستند که مستقیماً از و برای هر نقطه اندازه گیری یا محاسبه می شوند. برای انعکاس جسم، یک مدل پراکندگی باید در نظر گرفته شود، معمولاً پراکندگی لامبرتی، که به یک بردار معمولی و بنابراین، یک مدل سطح محلی نیاز دارد.
اگر همسایگی آن مورد تجزیه و تحلیل قرار گیرد، می توان برای هر نقطه اطلاعات اضافی به دست آورد. لی و همکاران [ 3 ] از ابرهای نقطه ای تولید شده از بلوک های تصویری توسط ساختار از حرکت (SfM) استفاده کنید. هدف آنها یافتن مطابقت بین یک تصویر داده شده و یک ابر نقطه در سراسر جهان است که هزاران مکان را در سراسر جهان پوشش می دهد. ویژگی مورد استفاده در کنار موقعیت نقطه، توصیفگر SIFT (Scale Invariant Feature Transform) [ 42 ] است.] از یک یا چند تصویر مورد استفاده برای تطبیق و بازسازی آن نقطه خاص. توصیفگر SIFT دارای ابعاد 128 است و به طور مستقیم رنگ را رمزگذاری نمی کند، بلکه جهت گرادیان را در مجاورت نقطه (تصویر) رمزگذاری می کند. چرخش و مقیاس ثابت است، اما در تصویر اصلی محاسبه می شود و بنابراین، نسبت به تغییرات (بزرگ) دیدگاه تغییر ناپذیر نیست. در این مورد، همسایگی از فضای تصویر گرفته شده است، اما می تواند در فضای شی نیز تعریف شود. یک مثال برای دومی، چگالی شدت است، همانطور که کلود و روتنشتاینر [ 43 ] پیشنهاد کردند.]، که بخشی از نقاط محله ای را که مشخصه «شدت» بالای یک آستانه مشخص است اندازه می گیرد. در اینجا، همسایگی برای به دست آوردن نتایج هموار استفاده می شود، که سپس در طبقه بندی استفاده می شود. به طور مشابه، چگالی نقطه ای در برزنک و همکاران استفاده شده است. [ 44 ] برای طبقه بندی مناطق ساحلی و سطوح آب. حمودی و همکاران [ 45 ] نقاط سه بعدی را به صورت عمودی به شبکه افقی نشان می دهد و از چگالی نقطه حاصل در “نقشه انباشتگی” [ 45 ، 46 ] برای تقسیم ساختارهای عمودی در مناطق شهری استفاده می کند.
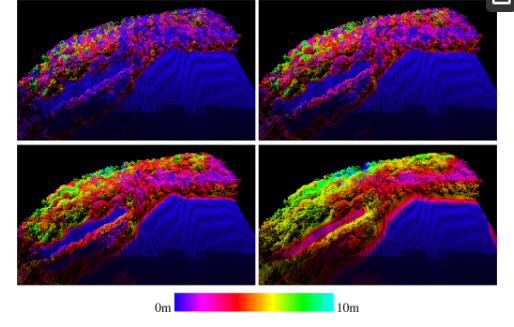
ویژگی هایی که هندسه محلی را توصیف می کند اغلب استفاده می شود. بوهم و پاتراکی [ 47 ] و لینسن و همکاران. [ 48 ] از بردار نرمال سطح و فاصله تا نقاط همسایه برای پاشیدن نقطه استفاده کنید. پاشیدن نقطه ای روشی برای نمایش نقاط با سطوح کوچک، رمزگذاری توزیع محلی نقاط (مثلاً دیسک های جهت دار) است. بردار نرمال با برازش صفحه ای که فاصله اقلیدسی نقاط همسایه تا صفحه را به حداقل می رساند، تخمین زده می شود. عابد و همکاران [ 49 ]، در مقابل، بردار معمولی را بر اساس یک شبکه مثلثی ابر نقطه به دست آمده محاسبه کنید، که ابتدا نیاز به مش بندی داده ها دارد. بردارهای نرمال ابرهای نقطه نشان داده شده در شکل 1برای یک نمایه در شکل 2 ارائه شده است. بائه و همکاران [ 50 ]، فراتر از بردار معمولی، از انحنا و واریانس انحنا برای تشخیص لبه و تقسیمبندی ابر نقطه استفاده کنید. Zeming و Bingwei [ 51 ] نیز از ویژگی انحنا استفاده می کنند، اما برای یافتن نقاط متمایز. بردار نرمال یک ویژگی است که نسبت به تغییر سیستم مختصات تغییر نمی کند. انحنا، که یک توصیف ذاتی سطح است، علاوه بر این برای چرخش ثابت است. فروم و همکاران [ 52 ] پیشنهاد می کند از توصیف کننده های شکل پیچیده تر برای تجزیه و تحلیل ابر نقطه استفاده کنید، به عنوان مثال، تصاویر چرخشی [ 53 ]]، که – در یک سیستم مختصات هم تراز با صفحه مماس – هیستوگرام یک تعداد نقطه نرمال شده از فاصله “افقی” و “عمودی” هستند (گزارش فنی در مورد توصیفگرهای شکل سه بعدی در Zhang و همکاران [ 54 ] ارائه شده است). هدف آنها تشخیص اجسام در ابر نقطه است. رویکرد مشابهی در Steder و همکاران ارائه شده است. [ 55 ]. هو و گیبنز [ 56 ] پیشنهاد کردند که چنین ویژگی هایی را از طریق فضای مقیاس محاسبه کنند، به عنوان مثال ، برای محله هایی با اندازه های مختلف. همه این ویژگی ها را می توان به صورت هندسی تفسیر کرد. مونیر و همکاران [ 46 ] روشی مبتنی بر آنتروپی برای انتخاب محله بهینه با استفاده از ویژگیهای هندسی فضای مقیاس ارائه میکند. متعلق بهو همکاران [ 57 ] زمینه شکل را پیشنهاد میکند، که متفاوت است، زیرا توصیفی کلی از کل ابر نقطه از منظر هر نقطه است.
ویژگی های آماری از محله محلی توصیف شده است، به عنوان مثال، در یو و همکاران. [ 58 ] با استفاده از توصیف کننده های توزیع نقطه عمودی، که سپس برای پیش بینی ویژگی های شی استفاده می شود. در همین دسته، وانگ و یوان [ 59 ] ویژگیهای مبتنی بر چگالی و انحنا را که از k (در مورد آنها 15) نزدیکترین همسایه محاسبه شدهاند، معرفی میکنند. ویژگی مبتنی بر چگالی میانگین فاصله تا k نزدیکترین همسایه است و ویژگی مبتنی بر انحنا مجموع زوایای بین بردار نرمال نقطه و هر یک از بردارهای نرمال نقطه همسایه آن است. لالوند و همکاران [ 60] از اجزای اصلی ابر نقطه در همسایگی برای طبقه بندی زمین برای اهداف ناوبری، به طور خاص تر، معیارهای خطی بودن، “حجمی بودن” و “سطح” استفاده کنید [ 61 ]. در گرسین و همکاران. [ 62 ]، ویژگی های آماری برای بهبود جهت گیری نسبی بین ابرهای نقطه ای با استفاده از نزدیکترین نقطه تکراری (ICP) استفاده می شود. در کنار لحظه های توزیع مختصات در یک محله، گیبنز و سویرکوفسکی [ 63] علاوه بر این، استفاده از گشتاورهای ثابت به چرخش و مقیاس نقاط و گشتاورهای Zernike را برای طبقهبندی ابر نقطه پیشنهاد کرد. در برخی موارد، این ویژگیهای آماری میتواند با یک ویژگی شی مطابقت داشته باشد، که معنای هندسی ندارد، اما همچنان یک کیفیت قابل درک را توصیف میکند. مثال دیگر نسبت اکو [ 9 ] است که نفوذپذیری یک سطح را توصیف می کند.
سهم ویژگی های خاص برای طبقه بندی شهری در Mallet و همکاران مورد مطالعه قرار گرفت. [ 64 ]. آنها ویژگی ها را به ویژگی های ارتفاع، ویژگی های ارزش ویژه، ویژگی های صفحه محلی، ویژگی های مبتنی بر اکو و ویژگی های شکل موج کامل گروه بندی کردند. دو گروه آخر مخصوص اسکن لیزری هستند.
ویژگی هایی که در بالا توضیح داده شد یا اندازه گیری می شوند یا از محله های محلی محاسبه می شوند. خود فرآیند اندازه گیری نیز بر خود نقطه تأثیر می گذارد، به ویژه در کیفیت مختصات و مقادیر ویژگی های آن. دقت های موقعیتی برای هر نقطه مجزا را می توان به روش های مختلفی به دست آورد. دقت های تجربی دستگاه اندازه گیری، پیکربندی اندازه گیری و انتشار خطا، امکان تخمین دقت ( پیشینی ) را فراهم می کند. اندازه گیری دقت داخلی یا نسبی را می توان از پیکربندی اندازه گیری بیش از حد تعیین شده، مانند تقاطع چند پرتو (تطبیق تصویر) یا جمع آوری داده های همپوشانی (اسکن لیزری هوایی و زمینی) و غیره به دست آورد.با این حال، محاسبه دقت مطلق به داده های مرجع خارجی (با دقت بالاتر از دقت اندازه گیری مورد انتظار) و مدل های اندازه گیری دقیق به طور کلی نیاز دارد [ 65 ]. بنابراین، دقت، یا بهطور کلیتر، کیفیت مختصات و ویژگیها را میتوان به عنوان ویژگیهای هر نقطه در نظر گرفت.
3. بررسی ساختار داده ها و محله ها
از آنجایی که میلیاردها نقطه ممکن است یک ابر را تشکیل دهند، سازمان پیچیده یک نیاز برای پردازش کارآمد است. تعریف و یافتن همسایگان یک نقطه اغلب در هر نقطه انجام می شود، بنابراین “میلیاردها بار”. مروری بر محلهها برای ابرهای نقطهای در Filin و Pfeifer [ 66 ] ارائه شده است، که با مروری بر انواع محلهها، همانطور که در ادبیات زیر پیشنهاد شده است، تکمیل شده است. در مرحله بعد، ساختارهای داده برای ابرهای نقطه بزرگ، و همچنین مدل هایی برای سازماندهی ویژگی ها و اطلاعات هندسی مورد بحث قرار می گیرند.
3.1. محله ها
همسایگی یک نقطه، P i زیر مجموعه ای از ابر نقطه است. توجه داشته باشید که P i لازم نیست عنصری از ابر نقطه باشد، بلکه ممکن است یک نقطه مجازی نیز باشد و نزدیکترین اندازه گیری آن جستجو می شود. اگر فاصله آنها از P i کمتر از یک آستانه خاص باشد یا اگر به k نزدیکترین نقطه نسبت به P i تعلق داشته باشند ، یا همسایه در نظر گرفته می شوند . مجموعه k نزدیکترین نقطه لزوما منحصر به فرد نیست. در هر دو مورد همسایگی، فاصله باید اندازه گیری شود. فاصله را میتوان به صورت دو بعدی اندازهگیری کرد، معمولاً صفحه xy ، که برای ابرهای نقطهای که مناطق بزرگی را پوشش میدهند و وسعت بیشتری را در xy نشان میدهند منطقی است .z . علاوه بر این، برای تجزیه و تحلیل ساختار عمودی، یک تحلیل ممکن است به طور معنیداری به همسایگی پلانسنجی دوبعدی محدود شود. در غیر این صورت، فاصله ها به صورت سه بعدی اندازه گیری می شوند.
اندازه گیری فاصله می تواند اقلیدسی باشد، که نشان دهنده استوانه ها و کره های عمودی برای حک کردن همسایگی به ترتیب دو بعدی و سه بعدی است. با توزیع داده های ناهمسانگرد، این اشکال ممکن است به طور وابسته تغییر شکل دهند، به عنوان مثال، با یک مقیاس z متفاوت از xy . متناوبا، می توان از متریک منهتن، مربوط به تفاوت های مختصات استفاده کرد. در این توصیف، همسایگی استوانه ای شکل تعبیه شده است که به صورت شعاعی در xy و تفاوت مطلق در z اندازه گیری می شود. آستانه برای فاصله افقی و عمودی (یا فاصله پلان سنجی و ارتفاعی) نباید یکسان باشد، که مربوط به یک مقیاس متفاوت در z است.
همه محله های فوق متقارن نیستند. تقارن برای یک محله به این معنی است که نقاط تحت یک تعریف همسایگی ثابت به طور متقابل همسایه هستند. حداکثر همسایههای مبتنی بر فاصله تقارن را ارائه میکنند، در حالی که k نزدیکترین محلهها تقارن ندارند. سایر همسایههای نامتقارن، همسایگی تطبیقی شیب [ 66 ] و همسایگی باریسنتریک [ 67 ] هستند. تعاریف همسایگی فوق را میتوان بهمنظور ارائه توزیع متقارنتری از نقاط اطراف P i به ربع یا اکتانت بهصورت جداگانه اعمال کرد . علاوه بر این، تعاریف مختلف محله را می توان با هم اعمال کرد تا همسایگان را محدود کند. یک مثال، انتخاب k به صورت دو بعدی در هر ربع استنزدیکترین همسایگان اگر کمتر از حداکثر فاصله باشند، r .
یک مثلث یا چهار وجهی نیز می تواند برای تعریف یک همسایگی استفاده شود [ 68 ، 69 ]. این باعث ایجاد نسلهایی از همسایگیها میشود، که در آن نسل کوچکترین تعداد لبههایی است که برای رسیدن به همسایه از Pi باید طی شوند . این همسایگی مستلزم آن است که نقطه P i بخشی از مثلث و بنابراین، معمولاً از کل مجموعه نقطه باشد.
اندازه همسایگی برای ویژگی های محاسباتی بر اساس همسایگی محلی اغلب به صورت تجربی انتخاب می شود. اندازه محله بهینه به عواملی مانند چگالی نقطه، انحنای محلی و سطوح نویز بستگی دارد [ 70 ]. Nothegger و Dorninger [ 71 ] روشی را برای اندازه همسایگی بهینه برای تخمین نرمال و تحلیل انحنای سطح با استفاده از مقادیر ویژه تانسور ساختار محلی پیشنهاد می کنند. به طور مشابه، Demantké و همکاران. [ 72 ] روشی مبتنی بر ویژگیهای آنتروپی تانسور ساختار محلی برای انتخاب شعاع بهینه ارائه میکند که هدف آن طبقهبندی هندسه محلی به ساختارهای خطی، مسطح و حجمی است. روشی برای تعیین اندازه محله بهینه برای تخمین نرمال در میترا و همکاران ارائه شده است. [70 ].
3.2. ساختار داده ها و شاخص های فضایی
محاسبه همسایگی ها در یک ابر نقطه تلاش قابل توجهی را مستقل از تعریف همسایگی می طلبد [ 73 ]. همسایگی های تعریف شده در بخش 3.1 را می توان به k پرس و جوهای نزدیکترین همسایه، پرس و جوهای شعاع ثابت و پرس و جوهای محدوده در فضای دو بعدی یا سه بعدی ترجمه کرد. یک استراتژی جستجوی ساده لوحانه به این سؤالات در O ( n 2 ) پاسخ می دهد) زمان، که برای کاربردهای دنیای واقعی غیر عملی است. از این رو، استفاده از ساختارهای داده مکانی مناسب برای سرعت بخشیدن به پرس و جوهای جستجو ضروری است. در این بخش به بررسی شاخص های مختلف فضایی پرداخته شده است. در مورد ابرهای نقطهای عظیم که توسط فناوریهای اندازهگیری کنونی به دست میآیند، دادهها به وضوح از مقدار حافظه رایانه موجود بیشتر است. بنابراین، داده ها باید در حافظه ثانویه (مانند درایوهای دیسک سخت یا دیسک های حالت جامد) ذخیره شوند و فقط به صورت تکه ای در حافظه بارگذاری شوند. I/O (ورودی/خروجی) ساختارهای داده کارآمد و استراتژیهای پردازش، همانطور که در بخش 3.3 مورد بحث قرار گرفت، الزامات اساسی برای دستیابی به مدیریت موثر دادهها هستند.
در طول سه دهه گذشته، انواع شاخص های فضایی مختلف توسعه یافته اند که حوزه فضای شاخص را به صورت منظم یا نامنظم تقسیم می کنند [ 74 ]. بسته به انواع هندسه (نقطه، خط، چند ضلعی و غیره )، توزیع داده ها، انواع پرس و جو و عملیات به روز رسانی احتمالی، باید از روش های مختلف نمایه سازی استفاده شود. هیچ شاخص بهینه ای برای همه موقعیت ها وجود ندارد. در ادامه متداول ترین روش های نمایه سازی و ویژگی های آنها شرح داده شده است.
درخت kd [ 75 ] یک روش نمایه سازی بسیار سریع برای پرس و جوهای نزدیکترین همسایه است، اما از داده های خط پشتیبانی نمی کند. علاوه بر این، درخت kd به سرعت در مورد عملیات به روز رسانی (درج یا حذف نقاط) نامتعادل می شود. ساختارهای چهاربعدی (شاخص دوبعدی) و octree (شاخص سه بعدی) برای عملیات به روز رسانی و پشتیبانی نقطه و داده های چند ضلعی مناسب هستند. با این حال، آنها نمی توانند با درختان kd از نظر سرعت در هنگام انجام پرس و جوهای نزدیکترین همسایه [ 76 ] رقابت کنند. همانطور که در [ 77]، با این حال، اجرای خاص ساختار داده (octree و kd tree) نیز بر سرعت نزدیکترین همسایه و پرس و جوهای شعاع ثابت تأثیر می گذارد. چهار و اکتره اغلب برای تجسم استفاده می شوند، زیرا می توانند به راحتی برای پشتیبانی از ساختارهای سطح جزئیات (LoD) سازگار شوند. چنین اطلاعات LoD برای تحقق تکنیک های رندر خارج از هسته کارآمد مورد نیاز است [ 78 ].
در حالی که چهار و هشت در انطباق با توزیع داده های ناهمگن محدود هستند، درختان R اشیاء نزدیک را با استفاده از حداقل مستطیل مرزی یا جعبه ها در سطح بالاتر بعدی درخت گروه بندی می کنند. مشکل کلیدی R-trees ایجاد درخت های متعادل و به حداقل رساندن پوشش و همپوشانی هایپرباکس های محدود کننده گره است. با این حال، درختان R تمایل دارند که از چهار یا هشت درخت بهتر عمل کنند، به عنوان مثال، [ 79 ، 80 ]، زیرا امکان ساخت درختان متعادل حتی در توزیع داده های ناهمگن وجود دارد. فعالیتهای بهروزرسانی سنگین میتواند به درختان نامتعادل منجر شود (یا حداقل تلاش زیادی برای حفظ تعادل درخت مورد نیاز است)، که ممکن است از مزیت فوقالذکر بیشتر باشد.
در شرایط خاص، حتی ساختارهای خطی، مانند یک پارتیشن فضای کاشی کاری ساده [ 81 ] یا مرتب سازی واژگانی بر اساس مختصات نقطه [ 32 ]، ممکن است رضایت بخش باشد.
3.3. ساختارهای داده و مفاهیم پردازش فضایی
استخراج ویژگیهای نقطهای بر اساس اطلاعات همسایگی برای کل ابر نقطه، در کنار شاخصهای فضایی مناسب، به استراتژیهای پردازش مؤثر نیز نیاز دارد. تنظیم دقیق شاخص های فضایی استفاده شده و طرحواره های پردازشی با ویژگی ها و توزیع داده های نقطه ای برای دستیابی به عملکرد بهینه ضروری است.
عملکرد ورودی/خروجی (ورودی/خروجی) ذخیرهسازی ثانویه اغلب عامل محدودکننده برای چنین کارهایی است که دادههای زیادی دارند. از این رو، الگوریتمها و پیچیدگی ورودی/خروجی آنها در ادامه بررسی میشوند. عملیات خواندن ( O I/O ( r )) و نوشتن ( O I/O ( w )) در صورت امکان بین ( O I/O ( rw )) از ذخیره سازی ثانویه، به خصوص دیسک های حالت جامد (SSD) تفاوت دارند. ، ممکن است تفاوت های قابل توجهی بین عملکرد خواندن و نوشتن نشان دهد [ 82 ].
ایزنبورگ و همکاران [ 83 ] مفهوم الگوریتمهای جریان را برای پردازش ابرهای نقطهای عظیم پیشنهاد کرد. اجرای جریان مثلث دلونی از داده ها به ترتیب طبیعی آنها استفاده می کند (به عنوان مثال، دنباله اندازه گیری). در حین خواندن داده های نقطه ای، الگوریتم از درخت شمارش نقاط از قبل ساخته شده استفاده می کند و به فرد امکان می دهد مناطق محلی را که به طور کامل خوانده شده اند شناسایی کند. سپس آن مناطق می توانند بیشتر پردازش شوند و در نهایت از حافظه حذف شوند. از این رو، تنها بخشهای کوچکی از ابر نقطه در هر زمان در حافظه نگهداری میشوند، با این فرض که دادههای نقطه ورودی به نحوی از نظر مکانی مرتب شدهاند. این فرض برای همه روشهای استاندارد گرفتن نقطه یا دادههای از پیش مرتبشده مکانی (مثلاً کاشیشده) صادق است. مزیت حذف یک مرحله از پیش مرتبسازی (مثلاً ساختن صریح یک ساختار داده سریالی) بدون معایب نیست. ابتدا، نتایج به ترتیب “تصادفی” به دست می آیند و بنابراین، معمولاً به مرحله مرتب سازی پس از پردازش نیاز دارند. علاوه بر این، تصمیم گیری در مورد اینکه چه زمانی یک منطقه محلی می تواند پردازش شود به روش محاسباتی ویژگی مورد نظر بستگی دارد، که باعث وابستگی متقابل قوی در بخش های مختلف زنجیره پردازش کلی می شود. پیچیدگی I/O به شرح زیر استO I/O (2 r ( n ) + مرتب سازی پست ).
یک مفهوم متفاوت با استفاده از توپولوژی اکتساب طبیعی داده های LiDAR توسط دیوید و همکاران ارائه شد. [ 84 ] ذخیره خطوط اسکن به عنوان خطوط پیکسل در فایل های شطرنجی چند لایه. با فرض یک الگوی اسکن منظم، فایل شطرنجی چند لایه یک شاخص فضایی تقریبی بر روی داده ها ارائه می دهد که می تواند برای پردازش نواری رضایت بخش باشد. این مفهوم در پروژه FullAnalyze ( http://fullanalyze.sourceforge.net/ ) پیاده سازی شده است.
یک راه عمومیتر برای دسترسی فضایی کارآمد، ایجاد یک شاخص فضایی مستقل است که فقط به دادهها اشاره میکند یا مستقیماً دادهها را در خود شاخص فضایی وارد میکند. هر دو گزینه بسته به وظیفه پردازشی که باید انجام شود، مزایا و معایبی دارند. ساختارهای شاخص فضایی مجزا معمولاً بسیار کوچکتر از خود داده های نقطه ای هستند، به عنوان مثال، [ 85 ]. از این رو، در مورد فرمتهای فایل منبع مناسب (فرمتهای باینری با دسترسی تصادفی) میتوان از تکثیر مقادیر عظیمی از دادههای نقطهای اجتناب کرد. از سوی دیگر، دادههای مرتبشده مکانی معمولاً منجر به عملکرد بهتر در مورد مراحل پردازش چندگانه میشوند (زیرا ترتیب پردازش معمولاً با ترتیب دادهها مطابقت بیشتری دارد) و امکان پیادهسازی طرحوارههای ویژگی انعطافپذیر و پویا را به طور کارآمد میدهد.
شکلهای پایدار شاخصهای فضایی باید دامنه نمایهسازی را فقط به یک سطح معین تقسیم کنند تا I/O کارآمد باشند (که در ادامه به عنوان شاخص سطح اول نامیده میشود). بنابراین، گره های برگ (گره های شاخص پایین ترین سطح؛ انتهای شاخه ها)، حاوی تعداد قابل توجهی از داده های نقطه ای (به عنوان مثال، بیش از 10000) هستند که اغلب به اندازه سطل توصیف می شوند [ 86 ]. در ذخیره سازی ثانویه، خواندن بلوک های بزرگ به ترتیب (خوانش های متوالی) کارآمدتر از اطلاعات کمتر از مکان های مختلف فایل (خواندن تصادفی) است [ 87 ]]. در شرایطی که چنین شاخص درشتی عملکرد فضایی رضایتبخشی را ارائه نمیکند، میتوان به طور موقت شاخص را در حین پرواز گسترش داد. همچنین ممکن است از یک شاخص متفاوت (شاخص سطح ثانویه) استفاده شود که عملکرد بهینه را برای انجام کار پردازشی فراهم می کند، مانند، به عنوان مثال، پرس و جوهای سه بعدی نزدیکترین همسایه یا تجسم در زمان واقعی [ 88 ].
اوتپکا و همکاران [ 89 ] یک شاخص کاشی کاری را به عنوان شاخص سطح اول و درختان kd را برای هر کاشی به عنوان شاخص ثانویه پیشنهاد کرد که در هنگام پرواز ساخته می شوند. بسته به پرس و جوهای جستجو، درختان kd در دو یا سه بعدی ساخته می شوند. چنین مفهومی برای نقاطی که به طور همگن توزیع شده روی دامنه صفحه زمین مناسب است، همانطور که برای اسکن لیزری هوا و تطبیق تصویر متراکم مناسب است. برای موقعیتهایی با چگالی نقطهای به شدت متغیر (مثلاً ابرهای نقطهای از اسکن لیزری زمینی)، ساختارهای سلسله مراتبی، مانند درختهای چهارگانه و درختهای R، به عنوان شاخص سطح اول مناسبتر هستند. در حالی که ساختارهای سلسله مراتبی را می توان معمولاً در O I/O ( r ( n ) + rw (n log n )) زمان، یک سازه کاشی کاری فقط به زمان خطی نیاز دارد ( O I/O ( r ( n ) + w ( n ))).
با استفاده از شاخص های فضایی، پردازش مجموعه داده های عظیم در تکه های مناسب ساده است. برای جلوگیری از پردازش مصنوعات در مرزهای تکه، معمولاً یک همپوشانی مناسب از تکه های تصادفی در نظر گرفته می شود. برای کارآمد بودن I/O و بهینه سازی عملکرد کلی، ذخیره برگ های بارگذاری شده مورد نیاز است [ 90 ].
قالبهای شطرنجی کاشیشده، مانند GeoTIFF کاشیشده (فرمت فایل تصویری با برچسب جغرافیایی)، معمولاً برای توصیف مدلهای ویژگی معمولی (مثلاً مدلهای زمین دیجیتال) استفاده میشوند. برای استخراج چنین مدل هایی، کاشی های فرمت خروجی معمولاً به عنوان قطعه پردازش استفاده می شوند. از سوی دیگر، استخراج ویژگیهایی (به عنوان مثال، تخمین صفحه محلی، توزیع نقطه عمودی، و غیره ) که در امتداد هر نقطه ذخیره میشوند را میتوان به طور موثر بر اساس ساختار شاخص فضایی بومی انجام داد. Sankaranarayanan و همکاران. [ 73 ] یک الگوریتم بهینه را توصیف کرد که نزدیکترین همسایگان را برای همه نقاط با شروع از برگهای شاخص ساختارهای دلخواه شاخص پایدار تعیین می کند.
3.4. مدیریت ویژگی های اضافی
روش هایی که در این بخش تا کنون توضیح داده شده اند به هندسه، یعنی مختصات محدود می شوند. در اینجا، تمرکز بر ذخیره مداوم ویژگی ها قرار می گیرد. یک طرح بسیار انعطافپذیر برای مدیریت ویژگیهای اضافی را میتوان با مدیریت ویژگیها در جداول پایگاههای داده استاندارد یا ساختارهای مشابه پیادهسازی کرد. از نقطه نظر فنی، جداول ویژگی باید از عملیاتی مانند پیوست و حذف پویا ستون های جدول پشتیبانی کند و انواع مختلف داده ها و مقادیر تهی را ارائه دهد. مقادیر تهی مفید هستند، به عنوان مثال، برای علامت گذاری ویژگی هایی که با موفقیت محاسبه نشده اند یا برای برخی از نقاط وجود ندارند. چنین سیستمی توسط Höfle و همکاران ارائه شده است. [ 91]، که از PostGIS (سیستم اطلاعات پست جغرافیایی) برای ذخیره اطلاعات نقطه و دستورات پایتون برای دسترسی و پردازش ابر نقطه استفاده می کند.
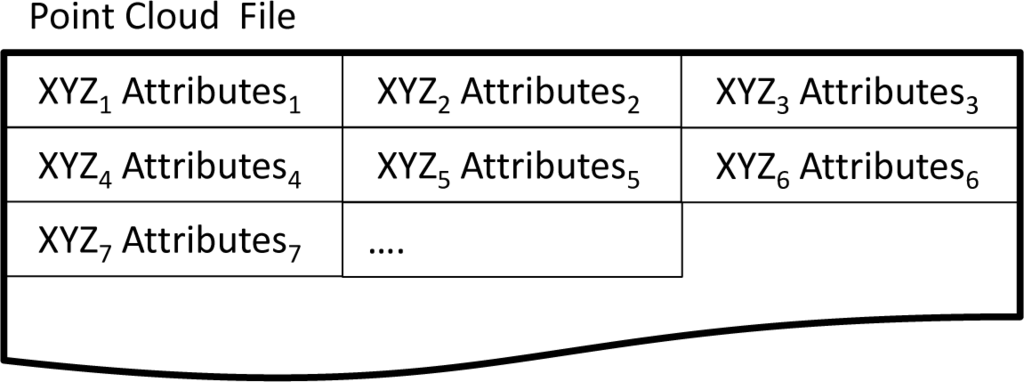
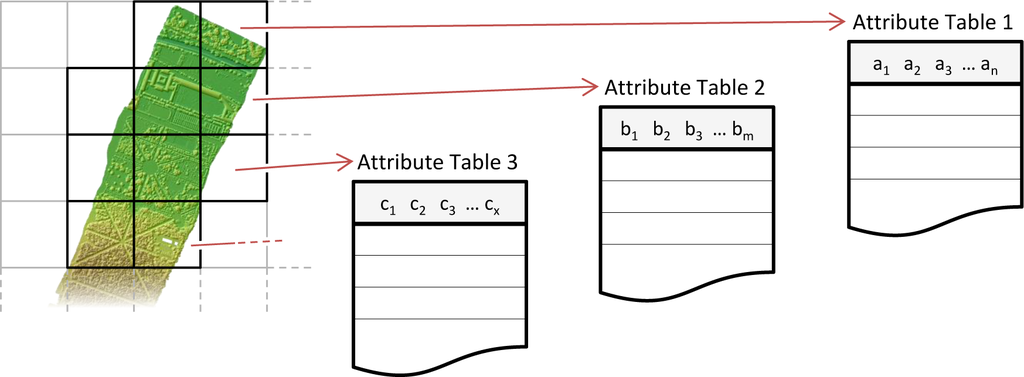
اگر مختصات نقطه و ویژگی ها به ترتیب ذخیره شوند، همانطور که در شکل 3 نشان داده شده است ، یک پیوند مستقیم داده می شود که دسترسی سریع از نقاط به ویژگی های آنها را تضمین می کند. با این حال، چنین ساختاری از انعطاف پذیری پایینی برخوردار است، زیرا در هنگام افزودن یا حذف ویژگی ها نیاز به بازنویسی کامل دارد. مشکل را می توان با رزرو فضای خالی مشخصه از قبل کاهش داد. استاندارد فرمت تبادل داده LiDAR ASPRS (انجمن فتوگرامتری و سنجش از دور آمریکا)، LAS [ 92]، چنین مفهومی را پیاده سازی می کند. علاوه بر ویژگیهای استاندارد، مانند دامنه یا زمان اندازهگیری، همانطور که در استاندارد تعریف شده است، میتوان به هر نقطه به اصطلاح «بایتهای اضافی» (با طول دلخواه) اضافه کرد. اگرچه این از اولین نسخه LAS (1.0) امکان پذیر بود، یک روش عمومی برای توصیف محتوای بایت اضافی وجود نداشت. این مشکل در LAS 1.4 (ضبط طول متغیر اضافی بایت) حل شد و فرمت را قدرتمندتر کرد.
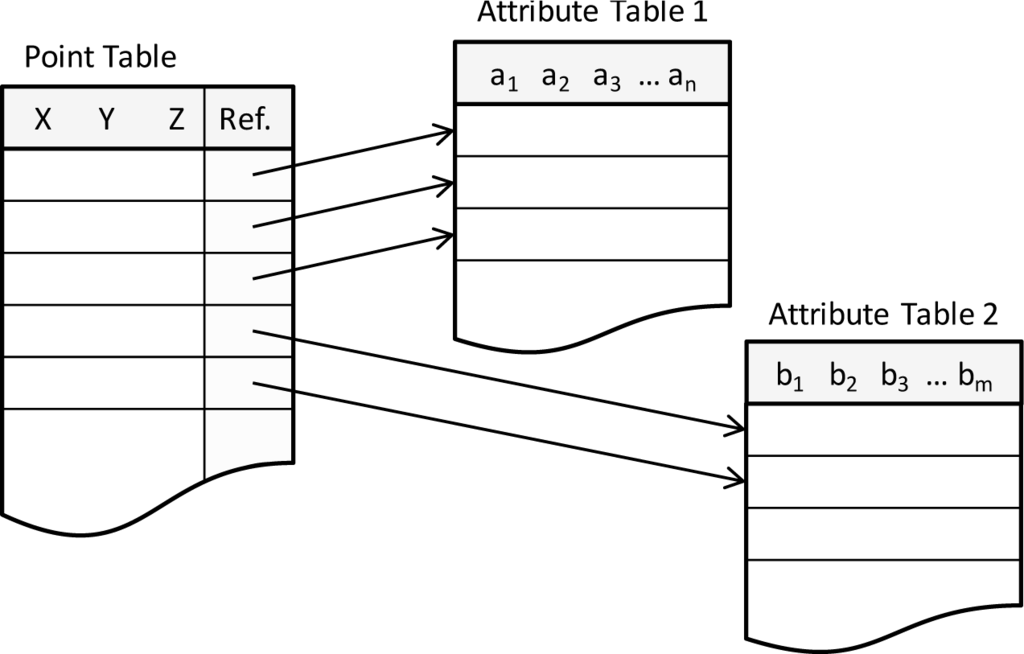
در صورتی که ویژگی ها در یک ساختار جداگانه مدیریت شوند، می توان مفاهیم پویا و انعطاف پذیرتری را تحقق بخشید. طرحواره های مشخصه های مختلف را می توان با جداول ویژگی های مختلف نشان داد، همانطور که در شکل 4 نشان داده شده است. هر نقطه پیوندی به ردیف داده در جدول ویژگی مربوطه دارد [ 89 ]. مزیت جداول ویژگی های متعدد زمانی به میان می آید که تنها زیرمجموعه ای از داده ها با ویژگی های جدید اضافه شوند یا مجموعه داده هایی از منابع داده های مختلف در یک پروژه واحد پردازش شوند. این به کاهش مصرف ذخیره سازی کمک می کند.
در OPALS [ 93 ]، ساختار شاخص فضایی سطح اول در جداول ویژگی منعکس می شود. همانطور که در شکل 5 نشان داده شده است، یک جدول ویژگی در هر برگ شاخص فضایی ایجاد می شود. برای کارهای استاندارد (به عنوان مثال، برآورد یک صفحه محلی در هر نقطه)، پردازش می تواند بر اساس برگ های شاخص فضایی اجرا شود. با توجه به حجم محدود داده های ذخیره شده در هر برگ، امکان بارگیری کامل نقاط مربوطه و ویژگی های آنها در حافظه با دسترسی تصادفی (RAM) وجود دارد. در آنجا تنظیم یا اضافه کردن ویژگیهای محاسبهشده به طور کارآمد ساده است. هنگامی که ترک به طور کامل پردازش شد، تغییرات ویژگی را می توان (به صورت تدریجی یا کامل) به جدول ویژگی بازگرداند. با توجه به جدول ویژگی های جدا شده، این ساختار از به روز رسانی های افزایشی در حین پرواز و پردازش موازی، هر دو بر اساس برگ های شاخص فضایی پشتیبانی می کند. نقطه ضعف این مفهوم، سربار مدیریت معین ناشی از جداول ویژگی های متعدد و تلاش اضافی مورد نیاز برای پشتیبانی از پرس و جوهای مبتنی بر ویژگی کارآمد است (به عنوان مثال، انتخاب همه نقاط با دامنه بالاتر از یک آستانه خاص). بنابراین، شاخص ها در جداول ویژگی مورد نیاز هستند.
4. بحث و پیشنهاد
4.1. مدیریت داده های Point Cloud
داده ها در یک ابر نقطه را می توان به ترتیب به مختصات و ویژگی ها جدا کرد. عملیات به روز رسانی می تواند در هر دو مجموعه (اضافه کردن نقاط جدید) یا در هر یک از آنها با تغییر مختصات یک نقطه رخ دهد. مثالهای دیگر، تبدیلهایی برای بهبود ارجاع جغرافیایی یا حذف نقاط به دلیل شناسایی اشتباه است. چنین تحولات جهانی منجر به ایجاد یک ابر نقطه جدید می شود که نیاز به بازسازی شاخص های فضایی دارد. نقاط منفرد، مانند اشتباهات، می توانند با استفاده از ویژگی های (جدید) علامت گذاری شوند، نه اینکه آنها را از مجموعه داده حذف کنیم. از این رو، به روز رسانی ویژگی های کارآمد معمولاً از اولویت بالاتری نسبت به تطبیق نقاط و مختصات آنها برخوردار است.
از آنجایی که تنوع برنامه های ارائه شده توسط ابرهای نقطه جغرافیایی بسیار گسترده است، ویژگی های مورد استفاده نیز بسیار متنوع هستند. بنابراین، مدلهای انعطافپذیر برای پردازش ابری چند منظوره توسعه داده شد، که سپس میتواند از یکسان بودن برخی مراحل پردازش، به عنوان مثال، طبقهبندی استفاده کند. در این زمینه، مطلوب است که روشی برای مدیریت دادهها پیادهسازی شود که اجازه میدهد: (1) یک تعریف رایگان از ویژگیها. (2) الحاق و حذف ویژگی ها در طول پردازش. و (iii) طرح واره ای که در آن نقاط مختلف ممکن است ویژگی های متفاوتی داشته باشند.
مدل هایی که این انعطاف پذیری را فراهم می کنند، همانطور که در بالا نشان داده شده است، یا از یک پایگاه داده یا جداول ویژگی های مختلف استفاده می کنند. در حالی که پایگاههای اطلاعاتی موجود و GIS طرحوارههای جدول قابل اعتماد و انعطافپذیری را ارائه میکنند، بین چنین مدل انعطافپذیر و راندمان پردازش بالا تفاوت وجود دارد. این با رویکردهای بالا با جداول ویژگی های مربوط به شاخص فضایی سطح اول حل می شود. با این حال، هنوز ارزیابی مقایسه ای انجام نشده است. طرح هایی با یک لیست ثابت از ویژگی ها، به دلیل سادگی، مزایایی دارند. برنامه هایی که به یک هدف خاص خدمت می کنند اغلب از چنین مدلی استفاده می کنند (به عنوان مثال، نمایشگرهای ابری نقطه ای (یک مثال FugroViewer است که لیست ثابتی از ویژگی ها دارد، www.fugroviewer.com )).
برای محاسبه ویژگی، جستجوهای سریع همسایگی ضروری است. با این حال، ساختارهای داده باید علاوه بر این، از پردازش و/یا تجسم نقطه ممکن پشتیبانی کند. همانطور که در بالا ذکر شد، اغلب نمی توان کل ابر نقطه را در حافظه بارگذاری کرد و ممکن است در طول پردازش مناطق گسترده، بخش های بزرگتری در حافظه ثانویه ذخیره شوند. بنابراین، شاخص فضایی برای دسترسی سریع به نقطه و ذخیره سازی مداوم باید با یکدیگر مرتبط باشند. این در رویکرد جریانی Isenburg و همکاران منعکس شده است. [ 83 ]، و همچنین شاخص فضایی دو سطحی، همانطور که در OPALS [ 93 ] استفاده می شود.
4.2. دسته بندی ویژگی ها
ویژگیهای نقاط را میتوان مستقیماً اندازهگیری کرد، با پردازش اندازهگیری، با در نظر گرفتن اندازهگیریهای داخل همسایگی به دست آمد، یا در ترکیب با سایر منابع داده محاسبه شد. برای محصولات دادههای ماهوارهای، از مشخصات چهار سطحی استفاده میشود (به عنوان مثال، سند EPS/GGS/REQ/95327 Eumetsat را ببینید)، با سطح 0 که قرائتهای حسگر خام، سطح 1، مقادیر ژئو ارجاعشده و کالیبرهشده رادیومتری، سطح 2، محیط بازیابی شده است. متغیرها و سطح 3، محصولات به دست آمده از ترکیب با داده های دیگر. این پیشرفت در شکل 6 نشان داده شده است . در حالی که سطوح محصول ماهواره ای کاملاً برای ابرهای نقطه جغرافیایی مناسب نیستند، مفهوم پیشرفت از اندازه گیری به مدل سازی است. بنابراین، سطوح پیشنهادی برای ابرهای نقطه ای عبارتند از:
- سطح 0: مختصات تولید شده و سایر اندازه گیری های ثبت شده توسط سنسور و به طور مستقیم با نقطه منفرد مرتبط است.
- سطح 1: مختصات نقطه بهبود یافته از ارجاع جغرافیایی بیشتر (در صورت وجود) و ویژگی های به دست آمده از پردازش بیشتر همه اندازه گیری ها از یک نقطه، به عنوان مثال، کمیت های کالیبره شده رادیومتری.
- سطح 2: ویژگی های محاسبه شده از همسایگی یک نقطه (چه در فضای سه بعدی برتر یا در سیستم مختصات حسگر). و
- سطح 3: ویژگی هایی که از ترکیب موارد فوق با سایر منابع داده به دست می آید.
علاوه بر این، بررسی در بخش 2.2 اشاره کرد که ویژگی های سطح 2 در یک فضای مقیاس تعبیه شده است. پارامتر مقیاس با وسعت همسایگی مورد استفاده برای محاسبه مقدار ویژگی تعیین می شود. علاوه بر این، به عنوان بخشی از فراداده، ویژگی ها باید با تخمین دقت آنها همراه باشد. این اجازه می دهد همگن سازی، به عنوان مثال ، تقسیم یک مقدار ویژگی بر انحراف استاندارد آن، ارائه یک عدد بدون واحد.
از بخشهای 2.1 و 2.2، ویژگیهای سطح 0 زیر مشخص میشوند. مختصات نقطه ( x ، y ، z )، که مستقل از دستگاه اندازه گیری هستند: برای تطبیق تصویر، علاوه بر این، رنگ نقاط در تصاویر، کیفیت تقاطع رو به جلو (تعداد پرتوها، دقت)، زمان قرار گرفتن در معرض و جهت پرتوها، که حاوی اطلاعات دید است. برای اسکن لیزری، ویژگی های اضافی عبارتند از شناسه اکو (تعداد اکو در عکس و تعداد کل پژواک در هر عکس)، بردار پرتو از سنسور به نقطه، دامنه و عرض اکو و زمان اندازه گیری.
سطح 1 از ویژگی های نقطه ای دقیق از کالیبراسیون و ترکیب مجدد اندازه گیری های مرتبط با یک نقطه تشکیل شده است. نمونههای بالا پارامترهای بازتاب، مقطع و مقطع دیفرانسیل کالیبرهشده رادیومتری هستند. علاوه بر این، شدت، رنگ و اشباع از اندازه گیری های هر نقطه محاسبه می شود. در تجزیه و تحلیل تصویر چندطیفی، اغلب از شاخصهای مختلفی استفاده میشود، به عنوان مثال، NDVI (شاخص گیاهی تفاوت نرمال شده؛ به عنوان مثال، [ 94 ، 95 ] را برای سایر شاخصها ببینید.)، که در یک سطح قرار میگیرند. توجه داشته باشید که بازتاب جسم با استفاده از مدل پراکندگی لامبرتی در این گروه قرار نمی گیرد، زیرا یک بردار معمولی برای تعیین آن نیاز به تخمین زدن دارد که نیاز به محاسبه در یک همسایگی دارد.
ویژگی های سطح 2 به یک اندازه گیری محدود نمی شوند، بلکه رفتار محلی اشیاء اندازه گیری شده را در یک نقطه اندازه گیری رمزگذاری می کنند. این همچنین می تواند به عنوان یک مدل محلی از جسم اندازه گیری شده دیده شود. بنابراین، تعاریف محله، از جمله، به ویژه، اندازه محله مورد نیاز است. اندازه گیری های توزیع محلی می تواند گشتاورها، چندک ها و تخمین های (قوی) آنها باشد، به عنوان مثال، MAD (میانگین انحرافات مطلق از میانه؛ در مورد توزیع های نرمال، اگر با ضرب شود، یک برآوردگر قوی برای انحراف استاندارد است. ضریب 1.4826 [ 96 ]). این ممانها را میتوان برای مختصات z ، بلکه برای مختصات x و y یا در یک سیستم مختصات تنظیم شده بر روی سطح محلی عادی محاسبه کرد.
علاوه بر این، معیارهای توزیع را نمی توان تنها برای مختصات نقطه، بلکه برای سایر ویژگی ها نیز تعیین کرد. چنین ویژگی آماری اندازه گیری چگالی نقطه محلی است. به همین ترتیب، بردار SIFT به عنوان توصیف کننده بافت تصویر محلی نیز در این دسته قرار می گیرد. در حالی که توصیفگرهایی مانند SIFT را می توان برای هر نقطه (یا پیکسل) در یک مجموعه استفاده کرد، باید توجه داشت که آنها اغلب فقط برای یک زیر مجموعه، یعنی نقاط علاقه (نقاط متمایز) اعمال می شوند. بر این اساس، لو [ 42 ] یک آشکارساز نقطه علاقه و یک توصیف کننده برای این نقاط کلیدی پیشنهاد می کند. SIFT همچنین به یک بعد بالاتر گسترش یافت، به عنوان مثال، Flitton و همکاران. [ 97 ] از آن در تصاویر سه بعدی ایجاد شده توسط توموگرافی کامپیوتری استفاده کنید.
در سطح 2 نیز پارامترهای مدل های محلی می توانند به ویژگی های یک نقطه تبدیل شوند. آنها در دو مرحله به دست می آیند: اول، یک مدل محلی از نقاط همسایه محاسبه می شود (مثلاً با حداقل مربعات متناسب با سطح مرتبه دوم)، و به عنوان مرحله دوم، پارامتری از این مدل به عنوان ویژگی استفاده می شود. از نقطه (به عنوان مثال، بردار نرمال سطح در نقطه مورد نظر). بنابراین، این ویژگی ها صفحه مماس و بردار نرمال، توصیفگرهای سطح مرتبه بالاتر (انحنا)، معیارهای کیفیت مدل محلی (به عنوان مثال، RMSE (ریشه میانگین مربع خطا) مدل)، اندازه گیری انحراف بین نقطه و مدل هستند. و غیره _
برای ویژگیهای سطح 2، اگر آنها نسبت به تغییر، چرخش و حتی مقیاس ثابت باشند، جالب است. تغییر ناپذیری برای تغییر و چرخش برای ویژگی های هندسی اعمال می شود که بر اساس مشتق اول و دوم یک سطح تخمین زده شده از نقاط همسایه است. اگر یک مدل سطح 2.5 بعدی محاسبه شود ( z = f ( x , y )) این به ویژه برای جابجایی و چرخش پلانیمتری صدق می کند . اگر مدل سطح مستقل از یک پارامترسازی محاسبه شود، به عنوان مثال، یک صفحه رگرسیون متعامد، برای همه جابجایی ها و چرخش ها برقرار است. توصیفگر SIFT علاوه بر این نسبت به مقیاس ثابت است، در حالی که سایر ویژگی ها به طور هدفمند در فضای مقیاس تعبیه شده اند. مثالی برای فضای مقیاس مقادیر ویژگی در شکل 7 آورده شده است، که در آن انحراف استاندارد ارتفاع برای اولین نقاط اکو یک ابر نقطه اسکن لیزری محاسبه می شود. شعاع از 2.0 متر با عوامل دو به 16.0 متر افزایش می یابد. چمنزار در قسمت پیشزمینه تصویر دارای پراکندگی دائمی کم است، در حالی که مقادیر با پراکندگی بالا از محل تقاطع تاج به مرز جنگل تغییر میکنند. برای بزرگترین شعاع، همچنین مناطق بزرگتر در سطح تاج دارای پراکندگی همگن هستند، زیرا قطر بزرگتر از یک درخت است.
ویژگیهای سطح 3 تابعی کلی از ویژگیهای نقطهای و مدلی در آن نقطه هستند، به عنوان مثال، ارتفاع نقطه بالای زمین، اما همچنین دادههای فراطیفی دادهشده برای نقطهای هستند که در ابتدا با اسکن لیزری به دست آمدهاند. گنجاندن یک مدل از منبع دیگر نشان دهنده رابطه قوی با یک برنامه خاص است. خاطرنشان می شود که برچسب های کلاس به دست آمده از طبقه بندی نظارت شده نیز در این دسته قرار می گیرند. به دلیل وابستگی به برنامه، تنوع ویژگی ها بسیار بیشتر است و این ویژگی ها بیشتر مورد بحث قرار نخواهند گرفت.
4.3. پردازش ابرهای نقطه ای با ویژگی ها
بررسی ادبیات نشان داد که ویژگیهای مورد استفاده برای پردازش ابرهای نقطهای ژئوارفرانسی بسیار متنوع هستند. با این حال، می توان آن ویژگی ها را دسته بندی کرد. سطوح پیشنهادی از داده های خام به نتایج تفسیر شده بیشتر و بیشتر می رسد.
سطح 1 یک ابر نقطه است که برای پردازش بیشتر استفاده می شود. استدلال برای حفظ ابر نقطه در Axelsson [ 98 ] و Pfeifer و همکاران خلاصه شده است. [ 99 ]، به طور خاص:
- حفظ وضوح اصلی، که در غیر این صورت در تولید مدل های پیوسته، به دلیل درون یابی از بین می رود.
- حفظ محتوای سهبعدی دادهها، از جمله مناطق خالی داده [ 37 ]، که در غیر این صورت در تولید مدلهای 2.5 بعدی به دلیل پارامترسازی بیش از xy از بین میرود . و
- عدم امکان پیش بینی اینکه کدام مدل ها یا ویژگی های اضافی باید برای یک برنامه خاص در آینده محاسبه شوند.
داده های سطح 1 معمولاً داده هایی هستند که باید بایگانی شوند. با این حال، در ویژگی های سطح 1 تمایزی وجود دارد. کالیبراسیون اندازهگیریها را از سطح 0، تغییر واحد، معرفی یک مقیاس خطی و غیره پیش میبرد . این مقادیر با استفاده از فرضیات جو و سیستم اندازه گیری به دست می آیند. این مقادیر یک رابط کاملاً تعریف شده بین ارائه داده و بهره برداری از داده را نشان می دهند. با این حال، کالیبراسیون رادیومتریک تنها در صورتی ممکن است انجام شود که ارزیابی کمی طیفی یک برنامه پیش بینی شده باشد، اما نه در غیر این صورت. در این صورت، داده های سطح 0 بایگانی می شوند و امکان کالیبراسیون بیشتر ممکن است از بین برود. در کاربردهایی مانند تفسیر بصری ابر نقطه، این نیز ضروری نیست.
ترکیب مجدد ویژگی های سطح 1 یک نقطه واحد باعث افزایش سطح نمی شود. با این حال، NDVI، به عنوان یک مثال، همیشه می تواند دوباره محاسبه شود و لزوماً نیازی به بایگانی ندارد. در توضیحات محصول داده های ماهواره ای، سطوح میانی (سطح 1a، 1b، و غیره ) برای نشان دادن چنین تفاوت هایی معرفی شدند. این در اینجا پیشنهاد نمی شود.
در سطح 2، می توان بین ویژگی هایی که تفسیر هندسی دارند، به عنوان مثال، بردار نرمال، و سایر ویژگی هایی که توزیع محلی نقاط یا سایر ویژگی ها را توصیف می کنند، تمایز قائل شد. در سطح 2، همسایگی معرفی می شود که ذاتاً تداوم خاصی از اشیاء اندازه گیری شده را در نظر می گیرد. علاوه بر این، برای معنی دار بودن ویژگی های هندسی محاسبه شده در سطح 2، باید فرض کرد که نمونه برداری به اندازه کافی متراکم است، به طوری که مدل محلی را می توان به طور قابل اعتماد تخمین زد.
در کارهای طبقه بندی یا تقسیم بندی، ویژگی های سطح 0 به ندرت با موفقیت استفاده می شوند. ارتفاع به تنهایی تنها در مناطق مسطح می تواند مفید باشد. اگر دامنه یا رنگ خام استفاده شود، ویژگیهای سطح 0 نیاز به تعریف دادههای آموزشی برای محاسبه وابستگی به پارامترهای ماموریت دارند. از سوی دیگر، ویژگیهای سطح 1 دارای معنای نسبتاً ژئوفیزیکی و بنابراین یک واحد معنیدار است که میتواند به ویژگیهای شی (مثلاً ضرایب جذب) مرتبط باشد. این باعث میشود که آنها بین دورههای مختلف اکتساب داده قابل مقایسه باشند، که برای ویژگیهای سطح 0 صادق نیست. با این حال، استخراج طبقات پوشش زمین از ویژگی های سطح 1 معمولاً دشوار است، زیرا طبقات به شدت با توجه به آن ویژگی ها همپوشانی دارند. به عنوان یک مثال، لبه های خانه و همچنین پوشش گیاهی، پژواک های متعددی را در ابرهای نقطه اسکن لیزری نشان می دهند. این نیز مشابه همپوشانی ویژگی های طیفی طبقات مختلف پوشش زمین است. یک راه حل استفاده از باندهای طیفی بیشتر است،به عنوان مثال ، انتخاب سنسوری که ویژگیهای سطح 1 بیشتری را برای جداسازی آن کلاسها فراهم میکند.
با این حال، به جای ویژگی های سطح 1 بیشتر، مشکل همپوشانی بالا بین برآمدگی های سقف و پوشش گیاهی در ابرهای نقطه ای نیز ممکن است با جستجوی ساختارهای خطی (لبه های خانه) که از رخداد منطقه ای (پوشش گیاهی) جدا شده اند، کاهش یابد. برای در نظر گرفتن همسایگی، بنابراین ویژگی های سطح 2. به جای ساختارهای خطی برای تمایز بین برآمدگی سقف و پوشش گیاهی، می توان از معیار مسطح برای جداسازی این دو استفاده کرد. مسطح بودن با دقت برازش صفحه به نقاط مجاور نقطه مورد بررسی بیان می شود. دوباره، یک ویژگی سطح 2.
نمونه هایی که قدرت بیان ویژگی های سطح 2 را نشان می دهند در شکل 8 آورده شده است. “نسبت پژواک” [ 9 ] بیان می کند که آیا در یک نمای عمودی، سطح جامد است یا می توان در آن نفوذ کرد. البته، فرض بر این است که خط دید برای اکتساب داده نیز عمودی است. به عنوان نسبت تعداد نقاط در یک همسایگی سه بعدی به تعداد نقاط یک همسایگی دو بعدی تعریف می شود، یعنی همسایگی که در z محدود نمی شود . ویژگی “سیگما 0 ” دقت برازش صفحه را برای صفحه رگرسیون متعامد در همسایگی سه بعدی نشان می دهد. نه تنها سقف ها، بلکه نقاط روی دیوار عمودی نیز در محله های مسطح قرار دارند، بنابراین سیگما 0 پایینی دارند.فقط چند سانتی متر نقاط در پوشش گیاهی، و همچنین در اطراف پشته سقف و دودکش، در یک صفحه قرار نمی گیرند، بنابراین “صدا” تا 60 سانتی متر را نشان می دهند. “Z نرمال شده” به عنوان رتبه نقطه (بین صفر و یک) در همسایگی ضرب در محدوده مقادیر z در همسایگی تعریف می شود. در مثال با زمین صاف، معادل ارتفاع از سطح زمین است. در نهایت، باز بودن مثبت، زاویه باز شدن یک مخروط متقارن را نشان میدهد که محور عمودی و راس آن روی نقطه تحلیل شده تنظیم شده است. مخروط تا حد امکان باز می شود تا نقطه دیگری در آن نباشد. در شکل 8a ، تأثیر شعاع (3 متر) محله در پشت بام قابل مشاهده است. در شکل 8c، شعاع 7 متر تعیین شده است، به این معنی که همیشه حداقل یک نقطه زمین در محله گنجانده شده است.
این مثالها همچنین نشان میدهند که حفظ ابر نقطه بهعنوان منبع برتر از مدلهای درونیابی است، زیرا محتوای سهبعدی از بین میرود. مثالهای بیشتری که این موضوع را برجسته میکنند در Höfle و همکاران ارائه شدهاند. [ 37 ]، جایی که استخراج یک سطح آب در زیر پوشش گیاهی آویزان نشان داده شده است، یا در لیندبرگ و همکاران. [ 100 ]، که در آن استخراج درختان زیر غالب توسط خوشه بندی ابر نقطه ای انجام می شود. بدیهی است که برای ابرهای نقطه ای به دست آمده از زمین، توزیع سه بعدی نقاط حتی بیشتر از داده های به دست آمده در هوا است. بنابراین، یافتن یک پارامتر مناسب (صفحه) که بسیاری از ویژگی ها را حفظ کند، اگر غیرممکن نباشد، دشوار است (به عنوان مثال، ابرهای نقطه ای از صحنه های جنگلی یا میدان های شهری).
بررسی مالت و همکاران. [ 64 ] نشان داد که ترکیبی از ویژگی های سطوح مختلف در طبقه بندی بهتر عمل می کند. از سوی دیگر، ویژگی های یک نوع، به عنوان مثال، معیارهای توزیع مختلف، دقت طبقه بندی را افزایش نمی دهد.
مقادیر آماری محاسبه شده بر روی تمام ویژگیهای یک ابر نقطه به ابرداده ابر نقطه تبدیل میشوند. در یک مورد ساده، این شامل وسعت یک جعبه مرزی موازی محور از نقاط یا محدوده یک ویژگی خاص است. به همین ترتیب، اقدامات مکان یا پراکندگی می تواند ارائه شود. با این حال، همچنین، تراکم نماینده داده ها یک مشخصه مهم است. تعیین یک چگالی معنیدار مستقل از کاربرد نیست و برای ابرهای نقطهای زمینی برای اهداف فهرستبندی جنگل یا ابرهای نقطهای هوابرد برای تحلیل شهری بسیار متفاوت تعریف شده است. در زمینه کسب (هوایی) در سطح وسیع، می توان تراکم را به عنوان تعداد نقاط در هر متر مربع تعریف کرد. با این حال، مناطقی از همپوشانی جمع آوری داده ها یا ویژگی های دستگاه اندازه گیری باید در نظر گرفته شوند. در اسکن لیزری، تعداد شات های منتشر شده یا تعداد پژواک های شناسایی شده را می توان در هر متر مربع مشخص کرد. در پوشش گیاهی، دومی بالاتر خواهد بود. بنابراین، تعریف اصطلاح “چگالی” بخشی جدایی ناپذیر از توضیحات فراداده است، نه تنها خود عدد واقعی.
5. نتیجه گیری ها
این مقاله تعریفی از «ابر نقطهای ارجاعشده جغرافیایی» ارائه میکند، که به ویژه بر ویژگیهای نقاط فراتر از سه مختصات آنها در یک سیستم مختصات ثابت زمین تأکید میکند. ویژگیهای بررسیشده ابتدا از نقطهنظر فناوری اندازهگیری و در مرحله دوم، از بهرهبرداری از آنها در پردازش ابری نقطهای، مانند تجسم، تقسیمبندی، طبقهبندی و مدلسازی در نظر گرفته شدند. در آخرین مورد، اطلاعات موضوعی به هر نقطه اضافه می شود، به این معنی که این برچسب کلاس به یکی دیگر از ویژگی ها (ویژگی) آن نقطه تبدیل می شود. دستهبندی ویژگیها به سطح 0 (اندازهگیریهای خام)، سطح 1 (ابرهای نقطهای کالیبرهشده از نظر هندسی و رادیومتری، غنیشده با ترکیب مجدد ویژگیهای یک نقطه منفرد)، سطح 2 (محاسبه شده از نقاط یک محله) و سطح 3 (محاسبه شده با ترکیب با مدل های دیگر) پیشنهاد شد. طبقه بندی و تقسیم بندی در این مقاله بررسی نشد.
حفظ ابر نقطه بومی برخلاف درون یابی خالص مدلهای سطحی، برای کاربردهای متنوع سودمند است، به عنوان مثال، طبقهبندی فضای شیء سود حاصل از حفظ محتوای سهبعدی، و همچنین توزیع اصلی.
ساختار مدیریت ابرهای نقطه جغرافیایی مرجع یا بر اساس یک تقسیم بندی منظم از فضا است که مزایایی برای تجسم دارد، یا بر اساس تقسیمات فرعی داده محور است که برای پرس و جوهای همسایگی ترجیح داده می شود. مورد دوم برای محاسبه ویژگی های سطح 2 مهم است.
مدلهای انعطافپذیر برای تعریف و گسترش ویژگیهای ابر نقطه برای ارائه انواع زیادی از برنامهها ضروری هستند. امروزه، سیستمهای اطلاعات جغرافیایی (GIS)، نرمافزار طراحی به کمک کامپیوتر (CAD) یا بستههای الحاقی ویژه ابزارهایی برای پردازش ابرهای نقطهای فراهم میکنند. مدل خاص آنها، به عنوان مثال، یک لیست استاندارد از ویژگی ها، می تواند کم و بیش انعطاف پذیر به عنوان آنهایی که در این مقاله ارائه شده است.
ابرهای نقطه ای به سراسر رشته ها می رسند، زیرا تولید، پردازش، مدیریت و ارائه آنها در اطلاعات جغرافیایی، بینایی کامپیوتر، روباتیک و فتوگرامتری مورد توجه است. ابرهای نقطه ای یک مخرج مشترک برای پردازش اسکن لیزری و داده های فتوگرامتری هستند. تفاوت آنها فقط در بردار ویژگی نهفته است. تفاوت های دیگر، به عنوان مثال، چگالی، به پارامترهای ماموریت (به عنوان مثال، ارتفاع پرواز، سنسور مورد استفاده)، و همچنین به وضعیت فعلی فن آوری (به عنوان مثال، پیچ پیکسل، سرعت تکرار پالس) بستگی دارد. شکل 1 و 2 این شباهت ها و همچنین تفاوت ها را نشان می دهد. از این رو، پردازش ابری نقطه انعطاف پذیر برای خدمت به این تنوع بسیار ضروری است.
منابع
- Rieger, P. پروژه اسکن لیزری وین. GEOconnex. بین المللی Mag. 2008 ، 7 ، 40-41. [ Google Scholar ]
- Mølhave، T. آگاروال، پ. آرگه، ال. Revsbæk، M. الگوریتمهای مقیاسپذیر برای دادههای بزرگ زمین با وضوح بالا، مجموعه مقالات اولین کنفرانس بینالمللی و نمایشگاه محاسبات برای تحقیقات و کاربردهای جغرافیایی، Bethesda، MD، ایالات متحده، 21-23 ژوئن 2010. پ. 20.
- لی، ی. اسناولی، ن. هاتنلوچر، دی. Fua, P. Worldwide Pose Estimation Using 3D Point Clouds، مجموعه مقالات کنفرانس بین المللی بینایی کامپیوتری (ECCV)، فلورانس، ایتالیا، 7-13 اکتبر 2012.
- التمیمی، ز. Collilieux، X. Mtivier, L. ITRF2008: راه حل بهبود یافته چارچوب مرجع بین المللی زمینی. جی. جئود. 2011 ، 85 ، 457-473. [ Google Scholar ]
- نبیکر، اس. بلیش، اس. کریستن، ام. ابرهای نقطه غنی در کره های مجازی – الگوی جدیدی در مدل سازی شهر؟ محاسبه کنید. محیط زیست سیستم شهری 2010 ، 34 ، 508-517. [ Google Scholar ]
- وارادی، تی. مارتین، آر.آر. کاکس، جی. مهندسی معکوس مدلهای هندسی – مقدمه. محاسبه کنید. به دس کمک کرد. 1997 ، 29 ، 255-268. [ Google Scholar ]
- دره، ن. ناوارو، SE; Worn, H. تشخیص اشیاء لمسی با استفاده از ویژگیهای ابر نقطهای آماری، در مجموعه مقالات پانزدهمین کنفرانس بینالمللی رباتیک پیشرفته. صص 15-20.
- روتزینگر، ام. هوفل، بی. هالاس، ام. Pfeifer، N. تجزیه و تحلیل ابر نقطه مبتنی بر شیء دادههای اسکن لیزری هوابرد با شکل تمام موج برای طبقهبندی پوشش گیاهی شهری. Sensors 2008 , 8 , 4505-4528. [ Google Scholar ]
- هوفل، بی. هالاس، ام. Hagenauer, J. تشخیص پوشش گیاهی شهری با استفاده از دادههای LiDAR هوابرد با ردپای کوچک با ردپای کوچک کالیبرهشده. ISPRS J. Photogramm. Remote Sens. 2012 ، 67 ، 134-147. [ Google Scholar ]
- کراسبی، سی جی; Arrowsmith، JR; ناندیگام، وی. Baru, C. دسترسی آنلاین و پردازش داده های توپوگرافی Lidar. در ژئوانفورماتیک ؛ انتشارات دانشگاه کمبریج: کمبریج، انگلستان، 2011; فصل 16; صص 251-256. [ Google Scholar ]
- اندازه گیری، R. سنجش از راه دور لیزری: وضعیت فعلی و چشم انداز آینده. Proc. SPIE 1997 , 3059 . [ Google Scholar ] [ CrossRef ]
- یاستیکلی، ن. Jacobsen، K. جهت گیری مستقیم حسگر برای نقشه برداری در مقیاس بزرگ – پتانسیل، مشکلات، راه حل ها. فتوگرام ضبط 2005 ، 20 ، 274-284. [ Google Scholar ]
- هوفل، بی. Pfeifer، N. تصحیح داده های شدت اسکن لیزری: داده ها و رویکردهای مدل محور. ISPRS J. Photogramm. Remote Sens. 2007 , 62 , 415-433. [ Google Scholar ]
- کاسالاینن، اس. آهوکاس، ای. هایپا، جی. Suomalainen، J. مطالعه روشنایی سطح از شدت لیزر پس پراکنده: کالیبراسیون داده های لیزر. IEEE Geosci. سنسور از راه دور Lett. 2005 ، 2 ، 255-259. [ Google Scholar ]
- واگنر، دبلیو. اولریچ، ا. دوچیچ، وی. ملزر، تی. تجزیه و کالیبراسیون Studnicka، N. Gaussian یک اسکنر لیزری هوابرد دیجیتالی جدید با شکل موج کامل با ردپای کوچک. ISPRS J. Photogramm. Remote Sens. 2006 ، 60 ، 100-112. [ Google Scholar ]
- مالت، سی. لافارژ، اف. روکس، ام. سورگل، یو. برتار، اف. Heipke, C. یک فرآیند نقطه مشخص برای مدلسازی شکل موج لیدار. IEEE Trans. فرآیند تصویر 2010 ، 19 ، 3204-3221. [ Google Scholar ]
- شوو، آ. مالت، سی. برتار، اف. دوریو، اس. Deseilligny، M. Puech، W. پردازش داده های Lidar شکل تمام موج: مدل سازی سیگنال های خام، مجموعه مقالات آرشیو بین المللی فتوگرامتری و سنجش از دور، اسپو، فنلاند، 12-14 سپتامبر 2007.
- Roncat، A.; برگاور، جی. Pfeifer، N. B-spline deconvolution برای تعیین مقطع هدف دیفرانسیل در داده های اسکنر لیزری شکل موج کامل. ISPRS J. Photogramm. Remote Sens. 2011 , 66 , 418-428. [ Google Scholar ]
- Duong، پردازش HV و کاربرد دادههای برد لیزری کامل شکل موج ردپای بزرگ ICESat. Ph.D. پایان نامه، دانشگاه صنعتی دلفت، دلفت، هلند، 2010. [ Google Scholar ]
- لیلسند، TM; کیفر، RW; Chipman، JW Remote Sensing and Image Interpretation ، 6 ed.; John Wiley & Sons Ltd: Hoboken, NJ, USA, 2007. [ Google Scholar ]
- هونکوارا، ای. آربیول، آر. مارکلین، ال. مارتینز، ال. کرامر، ام. بووت، اس. لوستر، ال. ایلوز، آر. کلونوس، اس. مارشال، پ. و همکاران فتوگرامتری دیجیتالی هوابرد – ابزار جدیدی برای سنجش از دور کمی؟ Remote Sens. 2009 , 1 , 577-605. [ Google Scholar ]
- Schaepman-Strub، G.; شاپمن، ام. نقاش، تی. دانگل، اس. مارتونچیک، جی. مقادیر بازتاب در سنجش از دور نوری – تعاریف و مطالعات موردی. سنسور از راه دور محیط. 2006 ، 103 ، 27-42. [ Google Scholar ]
- Hirschmüller، H. پردازش استریو با تطبیق نیمه جهانی و اطلاعات متقابل. IEEE Trans. الگوی مقعدی ماخ هوشمند 2008 ، 30 ، 328-341. [ Google Scholar ]
- Kraus, K. 8.1.2.1. ارجاع جغرافیایی در فتوگرامتری—هندسه از تصاویر و اسکن های لیزری ، 2 ed.; De Gruyter: برلین، آلمان، 2007; ص 459-475. [ Google Scholar ]
- کرامر، ام. استالمن، دی. Haala, N. Georeferencing مستقیم با استفاده از GPS/جهتهای بیرونی اینرسی برای کاربردهای فتوگرامتری، مجموعه مقالات آرشیو بینالمللی فتوگرامتری و سنجش از دور، آمستردام، هلند، 16–22 ژوئیه 2000. 33، صص 198-205.
- هیپکه، سی. یاکوبسن، ک. وگمن، اچ. اندرسن، Ø. Nilsen، B. جهت گیری حسگر یکپارچه-یک تست OEEPE، در مجموعه مقالات آرشیو بین المللی فتوگرامتری و سنجش از دور، آمستردام، هلند، 16-22 ژوئیه 2000. 33، صص 373-380.
- هیپکه، سی. یاکوبسن، ک. Wegmann, H. تجزیه و تحلیل نتایج آزمون OEEPE “گرایش حسگر یکپارچه”. OEEPE خاموش. انتشار 2002 ، 43 ، 31-49. [ Google Scholar ]
- Leberl, F. کاربردهای رادار تصویربرداری برای نقشه برداری و ترسیم نمودار. Photogrammetria 1976 ، 32 ، 75-100. [ Google Scholar ]
- توتین، تی. Gray, L. پیشرفته ترین استخراج ارتفاع از داده های ماهواره ای SAR. ISPRS J. Photogramm. Remote Sens. 2000 , 55 , 13-33. [ Google Scholar ]
- زو، ایکس. باملر، آر. توموگرافی SAR با وضوح بسیار بالا در محیط شهری. IEEE Trans. Geosci. Remote Sens. 2010 , 48 , 4296–4308. [ Google Scholar ]
- امیری سیمکویی، ع. اسنلن، ام. Simons، DG طبقهبندی رسوبات بستر رودخانه با استفاده از دادههای پراکندگی پسپاشی چند پرتوی. جی. آکوست. Soc. صبح. 2009 , 126 . [ Google Scholar ] [ CrossRef ]
- آرگه، ال. لارسن، KG; Mølhave، T. van Walderveen، F. Cleaning Massive Point Clouds، مجموعه مقالات هجدهمین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی (GIS’10)، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 2-5 نوامبر 2010.
- کوهوتک، تی. نیچه، ام. Eisenbeiss, H. نقشه برداری با ارجاع جغرافیایی با استفاده از دوربین سه بعدی هوابرد زمان پرواز. قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2011 . [ Google Scholar ] [ CrossRef ]
- وند، م. برنر، آ. بوکلوه، م. جنکه، پی. فلک، ا. هافمن، ام. مایر، بی. استانکر، دی. شیلینگ، آ. Seidel، HP پردازش و ویرایش تعاملی ابرهای نقطه عظیم از اسکنرهای سه بعدی. محاسبه کنید. نمودار. 2008 ، 32 ، 204-220. [ Google Scholar ]
- Lichti, D. فیلتر طیفی و طبقه بندی ابرهای نقطه اسکنر لیزری زمینی. فتوگرام ضبط 2005 ، 20 ، 218-240. [ Google Scholar ]
- بریز، سی. پفنیگباوئر، ام. لهنر، اچ. اولریچ، ا. واگنر، دبلیو. فایفر، N. کالیبراسیون رادیومتری دادههای اسکن لیزری چندموجی هوابرد، مجموعه مقالات ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences (ISPRS Annals). I-7، صص 335-340.
- هوفل، بی. وتر، م. فایفر، ن. ماندلبرگر، جی. Stötter, J. نقشهبرداری سطح آب از اسکن لیزری هوا با استفاده از دادههای شدت سیگنال و ارتفاع. فرآیند سطح زمین Landf. 2009 ، 34 ، 1635-1649. [ Google Scholar ]
- هالاس، ام. موکه، دبلیو. هوفل، بی. دوریگو، دبلیو. فایفر، ن. واگنر، دبلیو. بائرهانسل، سی. Regner، B. طبقهبندی گونههای درختی بر اساس دادههای اسکن لیزری هوابرد شکل کامل، مجموعه مقالات SILVILASER 2009، دنور، CO، ایالات متحده آمریکا، 14-16 اکتبر 2009.
- هاینزل، جی. Koch، B. بررسی پارامترهای LiDAR شکل موج کامل برای طبقه بندی گونه های درختی. بین المللی J. Appl. زمین Obs. Geoinf. 2011 ، 13 ، 152-160. [ Google Scholar ]
- الکساندر، سی. Tansey، K. کادوک، جی. هلند، دی. Tate, N. Backscatter ضریب به عنوان یک ویژگی برای طبقه بندی داده های اسکن لیزری هوابرد شکل تمام موج در مناطق شهری. ISPRS J. Photogramm. Remote Sens. 2010 , 65 , 423-432. [ Google Scholar ]
- نوینشواندر، آ. ماگرودر، ال. تایلر، ام. طبقهبندی لندکور دادههای لیدار با ردپای کوچک، شکل موج کامل. J. Appl. Remote Sens. 2009 ، 3 . [ Google Scholar ] [ CrossRef ]
- Lowe, DG ویژگی های تصویر متمایز از نقاط کلیدی تغییرناپذیر مقیاس. بین المللی جی. کامپیوتر. Vis. 2004 ، 60 ، 91-110. [ Google Scholar ]
- کلود، اس. Rottensteiner، F. طبقهبندی درختان و خطوط برق از دادههای اسکنر لیزری هوابرد با وضوح متوسط در محیطهای شهری، مجموعه مقالات کارگاه APRS در محاسبات تصویر دیجیتال (WDIC)، بریزبن، استرالیا، 21 فوریه 2005.
- برزنک، ا. هیپکه، سی. گوپفرت، جی. Soergel، U. جنبههای تولید مدلهای دقیق زمین دیجیتال در دریای وادن از طبقهبندی لیدار-آب و استخراج خط ساختار. ISPRS J. Photogramm. Remote Sens. 2008 , 63 , 510-528. [ Google Scholar ]
- حمودی، ک. دورنایکا، اف. سهیلیان، ب. والت، بی. مک دونالد، جی. Paparoditis، N. بازیابی نقشههای سه بعدی بافتدار بدون انسداد نماهای شهری با استفاده هم افزایی از تصاویر زمینی، ابرهای نقطه سه بعدی و اطلاعات مبتنی بر منطقه. Procedia Eng. 2012 ، 41 ، 971-980. [ Google Scholar ]
- مونیه، اف. والت، بی. سهیلیان، ب. تشخیص درختان از ابرهای نقطهای لیزری بهدستآمده در مناطق شهری متراکم توسط یک سیستم نقشهبرداری متحرک، مجموعه مقالات ISPRS سالنامههای فتوگرامتری، سنجش از دور و علوم اطلاعات فضایی (ISPRS Annals)، ملبورن، استرالیا، 25 اوت تا 1 سپتامبر 2012; I-3، صص 245-250.
- بوهم، جی. Pateraki، M. از نمونه های نقطه ای تا سطوح روی مش بندی و جایگزین ها. بین المللی قوس. فتوگرام Remote Sens. 2007 ، XXXVI/V ، 50–55. [ Google Scholar ]
- لینسن، ال. مولر، ک. روزنتال، پی.
- عابد، ف. میلز، جی پی. نرمالسازی دامنه میلر، PE Echo دادههای اسکن لیزری هوابرد شکل کامل بر اساس تخمین زاویه برخورد قوی. IEEE Trans. Geosci. Remote Sens. 2012 , 50 , 2910–2918. [ Google Scholar ]
- بائه، ک. بلتون، دی. Lichti، DD رویه های پیش پردازش برای ابرهای نقطه خام از اسکنرهای لیزری زمینی. جی. اسپات. علمی 2007 ، 52 ، 65-74. [ Google Scholar ]
- زمینگ، ال. Bingwei, H. الگوریتم ثبت خودکار مبتنی بر انحنا برای نقاط پراکنده، مجموعه مقالات سومین کنفرانس بین المللی 2011 در زمینه اندازه گیری فناوری و اتوماسیون مکاترونیک (ICMTMA)، شانگهای، چین، 6-7 ژانویه 2011. 1، ص 28-31.
- فروم، آ. هوبر، دی. کلوری، ر. بولو، تی. Malik, J. Recognsing Objects in Range Data Using Regional Point Descriptors، مجموعه مقالات کنفرانس اروپایی بینایی کامپیوتری (ECCV)، پراگ، جمهوری چک، 11-14 مه 2004.
- جانسون، ا. هبرت، ام. استفاده از تصاویر چرخشی برای تشخیص کارآمد شی در صحنههای سه بعدی درهم. IEEE Trans. الگوی مقعدی ماخ هوشمند 1999 ، 21 ، 433-449. [ Google Scholar ]
- ژانگ، ال. دا فونسکا، ام. فریرا، A. بررسی بر روی توصیفگرهای شکل سه بعدی . گزارش فنی، DecorAR (FCT POSC/EIA/59938/2004)؛ Fundação para a Cincia ea Tecnologia: لیسبون، پرتغال، 2007. [ Google Scholar ]
- استدر، بی. روسو، ر. کونولیج، ک. Burgard, W. Point Feature Extraction on 3D Range Scans with Account Object Boundaries 2601–2608.
- هو، اچ. Gibbins، D. رویکرد مبتنی بر انحنا برای استخراج ویژگی های چند مقیاسی از مش های سه بعدی و ابرهای نقطه ای بدون ساختار. محاسبه کنید. Vis. IET 2009 ، 3 ، 201-212. [ Google Scholar ]
- بلنگی، اس. مالک، ج. Puzicha، J. تطبیق شکل و تشخیص شی با استفاده از زمینه های شکل. IEEE Trans. الگوی مقعدی ماخ هوشمند 2002 ، 24 ، 509-522. [ Google Scholar ]
- یو، ایکس. Hyyppä، J.; واستارانتا، م. هولوپاینن، م. ویتالا، آر. ISPRS J. Photogramm. Remote Sens. 2011 ، 66 ، 28-37. [ Google Scholar ]
- وانگ، ال. Yuan، B. تشخیص نقطه ویژگی مبتنی بر انحنا و چگالی برای دادههای ابر نقطهای، مجموعه مقالات سومین کنفرانس بینالمللی IET در مورد شبکههای بیسیم، موبایل و چند رسانهای (ICWMMN 2010)، پکن، چین، 26-29 سپتامبر 2010.
- لالوند، جی اف. ونداپل، ن. هوبر، دی. هیبرت، ام. طبقه بندی زمین طبیعی با استفاده از داده های لادار سه بعدی برای تحرک ربات زمینی. ربات صحرایی جی. 2006 ، 23 ، 839-861. [ Google Scholar ]
- مدیونی، جی. لی، ام اس؛ تانگ، CK یک چارچوب محاسباتی برای تقسیم بندی و گروه بندی . الزویر: آمستردام، هلند، 2000. [ Google Scholar ]
- گرسین، آ. مالت، سی. دیوید، ن. بهبود ثبت سه بعدی ابر نقطه لیدار با استفاده از دانش همسایگی بهینه، مجموعه مقالات ISPRS سالنامه فتوگرامتری، سنجش از دور و علوم اطلاعات فضایی، ملبورن، استرالیا، 5 اوت تا 1 سپتامبر 2012. صص 111-116.
- گیبنز، دی. Swierkowski، L. مقایسه طبقهبندی زمین با استفاده از اندازهگیریهای ویژگی محلی دادههای سهبعدی نقطهای رنگی-ابر، مجموعه مقالات بیست و چهارمین کنفرانس بینالمللی محاسبات تصویر و بینایی نیوزلند (IVCNZ ’09)، پالمرستون شمالی، نیوزیلند، 23– 25 نوامبر 2009; ص 293-298.
- مالت، سی. برتار، اف. روکس، ام. سورگل، یو. Heipke, C. ارزیابی ارتباط دادههای لیدار شکل موج کامل برای طبقهبندی مناطق شهری. ISPRS J. Photogramm. Remote Sens. 2011 , 66 , S71–S84. [ Google Scholar ]
- رسل، سی. کاگر، اچ. Mandlburger, G. بررسی کیفیت پروژههای ALS با استفاده از آمار تفاوتهای نوار. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2008 ، XXXVII/3B ، 253-260. [ Google Scholar ]
- فیلین، اس. Pfeifer، N. سیستم های همسایگی برای داده های لیزری هوابرد. فتوگرام مهندس Remote Sens. 2005 ، 71 ، 743-755. [ Google Scholar ]
- Chaudhuri، B. تعریف جدیدی از همسایگی یک نقطه در فضای چند بعدی. تشخیص الگو Lett. 1996 ، 17 ، 11-17. [ Google Scholar ]
- Gorte، B. بخشبندی مدلهای سطحی با ساختار TIN. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2002 ، 34 ، 465-469. [ Google Scholar ]
- ماس، HG; Vosselman, G. دو الگوریتم برای استخراج مدل های ساختمان از داده های ارتفاع سنجی لیزری خام. ISPRS J. Photogramm. Remote Sens. 1999 ، 54 ، 153-163. [ Google Scholar ]
- میترا، نیوجرسی؛ نگوین، ا. Guibas, L. برآورد نرمال های سطح در داده های ابر نقطه نویز. بین المللی جی. کامپیوتر. Geom. Appl. 2004 ، 14 ، 261-276. [ Google Scholar ]
- ناثگر، سی. Dorninger, P. فیلتر سه بعدی ابرهای نقطه اسکنر لیزری زمینی با وضوح بالا برای مستندات میراث فرهنگی. فتوگرام فرنرکوند. Geoinf. 2009 ، 2009 ، 53-63. [ Google Scholar ]
- دمانتکی، جی. مالت، سی. دیوید، ن. Vallet، B. انتخاب مقیاس مبتنی بر ابعاد در ابرهای نقطه لیدار سه بعدی، مجموعه مقالات کارگاه ISPRS، اسکن لیزری 2011، کلگری، AB، کانادا، 29-31 اوت 2011.
- سانکارانارایانان، ج. صامت، ح. Varshney، A. یک الگوریتم سریع نزدیکترین همسایه برای برنامه های کاربردی شامل ابرهای بزرگ. محاسبه کنید. نمودار. 2007 ، 31 ، 157-174. [ Google Scholar ]
- سامت، ح . طراحی و تجزیه و تحلیل ساختارهای داده های مکانی ; Addison Wesley: Reading، MA، ایالات متحده آمریکا، 1989. [ Google Scholar ]
- بنتلی، JL درخت های جستجوی دوتایی چند بعدی که برای جستجوی انجمنی استفاده می شوند. اشتراک. ACM 1975 ، 18 ، 509-517. [ Google Scholar ]
- زینسر، تی. اشمیت، جی. نیمن، اچ. تحلیل عملکرد الگوریتمهای نزدیکترین همسایه برای ثبت ICP مجموعههای نقطه سه بعدی، مجموعه مقالات هشتمین کارگاه پاییز بینالمللی چشمانداز، مدلسازی و تجسم، مونیخ، آلمان، 19-21 نوامبر 2003.
- السبرگ، جی. مگنات، اس. سیگوارت، آر. Nüchter, A. مقایسه استراتژیها و پیادهسازیهای جستجوی نزدیکترین همسایه برای ثبت شکل کارآمد. جی. سافتو. مهندس روبات ها 2012 ، 3 ، 2-12. [ Google Scholar ]
- ریشتر، آر. Döllner, J. تجسم زمان واقعی خارج از هسته ابرهای عظیم نقطه سه بعدی، مجموعه مقالات هفتمین کنفرانس بین المللی گرافیک کامپیوتری، واقعیت مجازی، تجسم و تعامل در آفریقا (AFRIGRAPH ’10)، Franschoek، آفریقای جنوبی، 21– 23 ژوئن 2010; ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2010; صص 121-128.
- کوتوری، RKV; راوادا، اس. Abugov, D. Quadtree and R-Tree Indexs in Oracle Spatial: A Comparison Using Data GIS, مجموعه مقالات کنفرانس بین المللی ACM SIGMOD 2002 در مدیریت داده ها (SIGMOD ’02)، 3-6 ژوئن 2002. ACM، 2002; صص 546-557.
- کیم، وای جی؛ Patel، JM مقایسه عملکرد R * -tree و quadtree برای kNN و پرس و جوهای پیوستن فاصله. IEEE Trans. بدانید. مهندسی داده 2010 ، 22 ، 1014-1027. [ Google Scholar ]
- ماندلبرگر، جی. اوتپکا، جی. کارل، دبلیو. واگنر، دبلیو. Pfeifer, N. جهتگیری و پردازش دادههای اسکن لیزری هوابرد (Opals) – مفهوم و اولین نتایج یک نرمافزار جامع ALS، مجموعه مقالات کارگاه ISPRS Laserscanning ’09، پاریس، فرانسه، 1-2 سپتامبر 2009. صص 55-60.
- دیریک، سی. جیکوب، بی. عملکرد دیسکهای حالت جامد رایانه شخصی (SSD) به عنوان تابعی از پهنای باند، همزمانی، معماری دستگاه، و سازماندهی سیستم، مجموعه مقالات سی و ششمین سمپوزیوم بینالمللی سالانه معماری کامپیوتر (ISCA ’09)، 20 تا 24 ژوئن 2009; ACM, 2009; ص 279-289.
- ایزنبورگ، م. لیو، ی. شوچوک، جی. Snoeyink, J. Streaming Computation of Delaunay Triangulations, Proceedings of the SIGGRAPH’06, Boston, MA, USA, 30 ژوئیه–3 اوت 2006. ص 1049–1056.
- دیوید، ن. مالت، سی. Bretar, F. Library Concept and Design for Lidar Data Processing، مجموعه مقالات کنفرانس تحلیل تصویر مبتنی بر شی جغرافیایی (GEOBIA)، کلگری، AB، کانادا، 5-8 اوت 2008.
- Isenburg, M. LASindex—Spatial Indexing of LiDAR Data , 2013. موجود به صورت آنلاین: http://rapidlasso.com/category/videos قابل دسترسی در 18 اکتبر 2013.
- Guttman، A. R-Trees: A Dynamic Index Structure for Spatial Searching، مجموعه مقالات کنفرانس بین المللی مدیریت داده ها، بوستون، MA، ایالات متحده آمریکا، 18-21 ژوئن 1984. ص 47-57.
- اتکین، I. دستیابی به IOPS، مقدمه ای بر عملکرد دیسک . گزارش فنی؛ تیم پشتیبانی ICT دانشگاه آکسفورد: آکسفورد، بریتانیا، 2012. در دسترس آنلاین: http://www.symantec.com/connect/articles/getting-hang-iops-v13 در 18 اکتبر 2013 قابل دسترسی است.
- ویمر، ام. Scheiblauer, C. Instant Points: Fast Rendering of Processed Point Clouds، مجموعه مقالات سومین کنفرانس Eurographics/IEEE VGTC در زمینه گرافیک های مبتنی بر نقطه (SPBG’06)، بوستون، MA، ایالات متحده آمریکا، 29–30 ژوئیه 2006. انجمن Eurographics: Aire-la-Ville، سوئیس، 2006; صص 129-137.
- اوتپکا، جی. ماندلبرگر، جی. کارل، دبلیو. مدیر داده های OPALS—مدیریت کارآمد داده برای پردازش پروژه های بزرگ اسکن لیزری هوابرد، مجموعه مقالات ISPRS Annals of the Photogrammetry، ملبورن، استرالیا، 25 اوت تا 1 سپتامبر 2012. I-3، صص 153-159.
- کریلوس، او. باودن، GW; Kellogg، تجسم همهجانبه LH و تجزیه و تحلیل داده های LiDAR، مجموعه مقالات چهارمین سمپوزیوم بین المللی پیشرفت در محاسبات بصری (ISVC ’08)، لاس وگاس، NV، ایالات متحده، 1-3 دسامبر 2008. Springer-Verlag: برلین/هایدلبرگ، آلمان، 2008; صص 846-855.
- هوفل، بی. روتزینگر، ام. Geist، T. Stötter, J. استفاده از دادههای اسکن لیزری هوابرد در مدیریت دادههای شهری – راهاندازی یک سیستم اطلاعاتی انعطافپذیر با اجزای منبع باز، مجموعه مقالات سمپوزیوم مدیریت دادههای شهری (UDMS 2006)، آلبورگ، دانمارک، 15-17 مه 2006. ص 7.11-7.23.
- ASPRS. فعالیت های تبادل فرمت فایل LAS ; صفحه اصلی فرمت فایل ASPRS LAS، 2011. در دسترس آنلاین: http://www.asprs.org/Committee-General/LASer-LAS-File-Format-Exchange-Activities.html در 18 اکتبر 2013 قابل دسترسی است.
- اوپال. جهت گیری و پردازش داده های اسکن لیزری هوابرد (صفحه اصلی محصول). دپارتمان ژئودزی و اطلاعات جغرافیایی-گروه های پژوهشی فتوگرامتری و سنجش از دور ، 2013. در دسترس آنلاین: http://geo.tuwien.ac.at/opals در 18 اکتبر 2013.
- بناری، ع. مورین، دی. بن، اف. Huete, A. مروری بر شاخص های گیاهی. Remote Sens. Rev. 1995 , 13 , 95-120. [ Google Scholar ]
- استاگاکیس، اس. گونزالس-دوگو، وی. سید، پ. گیلن-کلیمان، ام. Zarco-Tejada، P. پایش تنش آب و کیفیت میوه در یک باغ پرتقال تحت کم آبیاری تنظیم شده با استفاده از شاخصهای سنجش از دور ساختاری و فیزیولوژیکی نوار باریک. ISPRS J. Photogramm. Remote Sens. 2012 ، 71 ، 47-61. [ Google Scholar ]
- مارونا، آر. مارتین، دی. یوهای، وی. آمار قوی: نظریه و روش ها . Wiley: Chichester، UK، 2006. [ Google Scholar ]
- فلیتون، جی. برکن، تی. مقربی، ن. مقایسه توصیفگرهای نقطه علاقه سه بعدی با کاربرد در تشخیص اشیاء چمدان فرودگاه در تصاویر پیچیده CT. تشخیص الگو 2013 ، 46 ، 2420-2436. [ Google Scholar ]
- Axelsson، P. پردازش دادههای اسکنر لیزری – الگوریتمها و برنامهها. ISPRS J. Photogramm. Remote Sens. 1999 ، 54 ، 138-147. [ Google Scholar ]
- فایفر، ن. ماندلبرگر، جی. اوتپکا، جی. Karel, W. OPALS – چارچوبی برای تجزیه و تحلیل داده های اسکن لیزری هوابرد. محاسبه کنید. محیط زیست سیستم شهری 2013 . ارسال شده. [ Google Scholar ]
- لیندبرگ، ای. هولمگرن، جی. اولوفسون، ک. والرمن، جی. اولسون، اچ. تخمین فهرست های درختی از اسکن لیزری هوابرد با استفاده از خوشه بندی مدل درختی و انتساب k-MSN. Remote Sens. 2013 ، 5 ، 1932-1955. [ Google Scholar ]



© 2013 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/3.0/) توزیع شده است.
بدون نظر