

خلاصه
این مقاله به بررسی ادغام اطلاعات ترافیک (TI) در مسیریابی در حضور موانع متحرک میپردازد. هنگامی که حوادث ترافیکی رخ می دهد، حوادث می توانند انواع مختلفی از خطرات را ایجاد کنند (به عنوان مثال، توده های سمی)، که بخش های خاصی از شبکه جاده را غیرقابل دسترس می کند. از سوی دیگر، اولین امدادگران که مسئولیت مدیریت حوادث ترافیکی را بر عهده دارند، باید سریع و ایمن به محل حادثه هدایت شوند. برای پشتیبانی از ناوبری در شبکه ترافیک تحت تأثیر موانع متحرک، در این مقاله، ما یک مدل داده مکانی-زمانی برای ساختار اطلاعات شرایط ترافیکی که برای مسیریابی ضروری است، ارائه میکنیم و یک الگوریتم برنامهریزی مسیر توسعه یافته به نام MOAAstar–TI ارائه میکنیم. (Moving Obstacle Avoiding A* with Traffic Information)، برای ایجاد مسیرهایی با اجتناب از موانع. یک عامل تنظیم سرعت در الگوریتم مسیریابی توسعهیافته معرفی شده است، که اجازه میدهد اطلاعات وسایل نقلیه و موقعیتهای ترافیکی را برای ایجاد مسیرهایی با اجتناب از موانع متحرک ناشی از حوادث یکپارچه کند. ما سیستم خود را روی مجموعه ای از سناریوهای ناوبری اعمال کردیم. نتایج کاربرد پتانسیل های سیستم ما را در کاربردهای آینده در زندگی واقعی نشان می دهد.
کلید واژه ها:
مدیریت حوادث ترافیکی ؛ مدل داده های مکانی ; الگوریتم مسیریابی ; موانع سرگردان
1. معرفی
مدیریت حادثه (IM) به عنوان «کلیه اقداماتی است که در نظر گرفته شده برای پاکسازی جاده برای تردد در سریعترین زمان ممکن پس از وقوع یک حادثه، تضمین ایمنی برای خدمات اضطراری و کاربران جاده و کنترل خسارت» [1 ] . IM نقش مهمی در حفظ ایمنی شبکههای جادهای و رسیدگی به حوادث ایفا میکند و سازمانهای مختلف (مثلاً پلیس و آتشنشانی) را درگیر میکند که مسئول مجموعهای از اقدامات، مانند پاکسازی بلوکها و نجات قربانیان هستند. برای این سازمان ها، موضوع مهم تعیین بهترین مسیر رانندگی به سمت صحنه حادثه است [ 2 ].
در طول مدیریت حوادث، نیاز به حمایت از اولین پاسخ دهندگان در جهت یابی در میان موانع متحرک وجود دارد. به عنوان مثال، می توان در صورت تصادف با کامیون حامل مواد شیمیایی، ستون های سمی ایجاد کرد و جاده ها را مسدود کرد. در چنین مواردی، اولین پاسخ دهندگان باید راهنمایی شوند تا از موانع ناشی از خطرات اجتناب کنند و با خیال راحت به محل وقوع حادثه برسند. در صنعت ناوبری خودرو، بسیاری از سیستمهای هدایت مسیر تجاری (به عنوان مثال، Tom-Tom، INRIX، Google و Garmin) توسعه یافتهاند و برخی از این سیستمها حتی قادرند اطلاعات ترافیکی را برای پیشنهاد یک مسیر جایگزین ترکیب کنند. با این وجود، این سیستم ها دینامیک خطرات ناشی از حوادث را در نظر نمی گیرند و بنابراین نمی توانند خدمات مسیریابی را در میان موانع متحرک ارائه دهند. در دانشگاه،3 ، 4 ، 5 ، 6 ] و در مطالعات جدیدتر، برخی از محققان استفاده از مدل های خطر را برای پشتیبانی از ناوبری در حضور خطرات بررسی کرده اند. با استفاده از مدل آتش، وانگ و همکاران. [ 7 ] الگوریتم A* را برای محاسبه مسیرهایی که از آتش سوزی جلوگیری می کنند، گسترش دهید. Mioc و همکاران [ 8 ] از یک مدل هیدرولوژیکی برای پیشبینی سیلاب استفاده میکنند و محاسبه مسیرهای تخلیه را با در نظر گرفتن عمق آب و انواع وسایل نقلیه مورد مطالعه قرار میدهند. با توجه به اینکه جاده های مسدود شده را می توان هنگام حرکت موانع استفاده کرد، ویسر [ 9 ] و وانگ و زلاتانوا [ 10]] گزینه انتظار را برای جلوگیری از حرکت موانع مانند ستون ها معرفی کنید. با این حال، برنامه ریزان مسیر فوق، شرایط ترافیکی را در نظر نمی گیرند. بنابراین، آنها را نمی توان به طور مستقیم به شبکه های جاده ای با جریان ترافیک بزرگ اعمال کرد.
اطلاعات به موقع و دقیق نقش مهمی در زنجیره اطلاعات بین تمام خدمات اضطراری مدیریت حوادث دارد. در بسیاری از مطالعات، مشکلات مربوط به اطلاعات (اشتراک گذاری)، ارتباطات و هماهنگی به عنوان گلوگاه های اصلی برای همکاری موثر بین خدمات اورژانس شناسایی شده است (به عنوان مثال، [ 11 ، 12 ]). فقدان ارزیابی در زمان واقعی از پیامدهای تحرک یک حادثه، و همچنین پیامدهای گسترده تر آن برای منطقه اطراف، از نظر امنیت و ایمنی، توانایی تصمیم گیرندگان را برای واکنش موثر به یک حادثه و مدیریت مختل می کند. عواقب آن میز 1سه دسته اطلاعات مختلف مورد نیاز برای IM را خلاصه می کند: اطلاعات مربوط به حادثه، اطلاعات محیط اطراف و اطلاعات سازمان. برای انجام فرآیند IM به شیوه ای موثر و کارآمد، نیاز به اطلاعات بلادرنگ (مکانی) و سیستم های اطلاعاتی پشتیبانی کننده زیاد است. ارتباطات و فناوری اطلاعات به خوبی تثبیت شده و مسئولیت های سازمانی مشخص در میان خدمات اورژانسی از مهمترین موضوعات برای IM است. در واقع، آنها پیش نیازی برای کاربرد موثر IM هستند. رابط “وضعیت” و رابط “کنترل” در یک مرکز مدیریت ترافیک دو حوزه اصلی هستند که در آن سیستم های اطلاعاتی نقش مهمی ایفا می کنند. رابط های وضعیت سیستم مدیریت ترافیک برای نظارت شامل حلقه های القایی، دوربین ها و ناظران انسانی است. برای پشتیبانی از اقدامات ترافیکی، مقامات راه از علائم پیام متغیر، علائم محدودیت سرعت، اندازهگیری سطح شیب دار و خطوط اوج/بعلاوه و اقدامات ویژه برای IM استفاده میکنند. خطوط پیک/پلاس خطوط ترافیکی اضافی هستند که در صورت نیاز میتوانند به روی ترافیک باز شوند. هنگامی که بسته است، خطوط برای استفاده انحصاری از خدمات اورژانس [13 ]. در واکنش به حوادثی که شامل مواد شیمیایی یا خطرناک است، سطح بالایی از آمادگی و دانش دقیق در زمان واقعی از ضربه مورد نیاز است. بنابراین، فنآوریهای نوآورانه و زیرساخت اطلاعاتی بهتری که از مدیریت حادثه پشتیبانی میکند، ضروری است.
یک دسته مهم از اطلاعات مورد نیاز برای مسیریابی در میان موانع متحرک، اطلاعات وضعیت ترافیک در شبکه های جاده ای است. موقعیتهای مختلفی مانند تصادف خودرو، ازدحام و جریانهای ترافیکی زیاد ممکن است در شبکه راهها رخ دهد که باعث کندی حرکت وسایل نقلیه و یا حتی مسدود شدن جادهها میشود. علاوه بر این، سرعت وسیله نقلیه نقش مهمی در اجتناب از موانع متحرک در محیطهای متاثر از خطر دارد. با سرعت های مختلف، افراد ممکن است به مسیرهای مختلفی برای اجتناب از موانع یا عبور از آنها نیاز داشته باشند [ 7]. از آنجا که سرعت وسیله نقلیه تا حد زیادی به ترافیک بستگی دارد، سیستم هدایت مسیر نه تنها باید وضعیت جاده ها را تحت تأثیر موانع متحرک بلکه شرایط ترافیکی را نیز در نظر بگیرد. این امر به ویژه برای ناوبری پاسخ دهندگانی که برای انجام عملیات نجات خود باید در کمترین زمان به مقصد بروند بسیار مهم است.
زمان سفر یکی از شاخص های حیاتی است که وضعیت ترافیک را منعکس می کند. این شاخص در سیستم های مدیریت ترافیک و در سیستم های هدایت مسیر به طور گسترده مورد استفاده قرار گرفته است. یک موضوع مهم در مورد زمان سفر، پیش بینی آن است. تلاشهای پژوهشی قابل توجهی در این راستا انجام شده و روشها و فناوریهای مختلفی برای پیشبینی زمان سفر در آزادراهها یا بزرگراهها مانند شبکههای عصبی [ 14 ، 15 ، 16 ]، فیلتر کالمن [ 17 ، 18 ] و پشتیبانی به کار گرفته شده است. رگرسیون برداری [ 19 ، 20 ]. زیرا حوادث می توانند باعث اختلال در جریان ترافیک شوند [ 21]، توجه ویژه ای به در نظر گرفتن اطلاعات حوادث در پیش بینی زمان سفر شده است. فی و همکاران [ 22 ] یک مدل خطی دینامیکی مبتنی بر استنتاج بیزی برای پیشبینی زمان سفر کوتاهمدت آزادراه ایجاد کنید. آنها همچنین یک چارچوب مبتنی بر کنترل تطبیقی را برای ثبت نوسانات زمان سفر در طول ازدحام غیرمکرر ناشی از رویدادهای پیش بینی نشده (حوادث و حوادث) پیشنهاد می کنند. بر اساس کار [ 22 ]، یک مدل توسعه یافته در [ 23 ] ارائه شده است، با استفاده از یک مدل پنهان مارکوف برای گرفتن ماهیت احتمالی تاخیرهای زمان سفر مرتبط با تراکم. لی و چن [ 24] یک مدل پیشبینی، با ادغام سه تکنیک دادهکاوی، یعنی K-means، درخت تصمیم و شبکه عصبی، برای پیشبینی زمان سفر یک آزادراه با تراکم غیر مکرر ایجاد کنید. برای پیمایش در میان موانع متحرک، نه تنها به اطلاعات پیشبینیشده موانع متحرک، بلکه به اطلاعات پیشبینیشده زمان سفر نیز نیاز است. مطالعات فوق مجموعه ای از راه حل های امیدوارکننده را برای پیش بینی زمان سفر در طول حوادث ارائه می دهد که برای برنامه ریزی مسیر در حضور موانع متحرک مفید خواهد بود.
در این مقاله، به موضوع ادغام اطلاعات ترافیک در ناوبری برای اولین پاسخ دهندگان برای جلوگیری از موانع متحرک ناشی از حوادث می پردازیم. یک مدل داده مکانی از [ 7 ] برای ساختار هر دو اطلاعات زمان واقعی و پیشبینیشده شرایط ترافیکی در شبکه جادهها اقتباس شده است. بر اساس کار [ 25 ]، ما یک الگوریتم A* توسعه یافته را ارائه میکنیم که میتواند با اطلاعات موجودی و اطلاعات ترافیک جادهها کار کند و آن را برای ایجاد مسیرهای جلوگیری از موانع در یک شبکه ترافیکی اعمال کند. ساختار باقی مانده این مقاله به شرح زیر است. در بخش 2، ما معماری سیستم خود را نشان می دهیم که سیستم شبیه سازی خطر و سیستم پیش بینی ترافیک را برای پشتیبانی از مسیریابی در حضور موانع متحرک ترکیب می کند. بخش 3 مدل داده های مکانی پیشنهادی را ارائه می کند. در بخش 4 ، ما تغییرات الگوریتم مسیریابی را با جزئیات کامل شرح می دهیم. در بخش 5 ، مدل داده پیشنهادی و الگوریتم توسعهیافته را برای مجموعهای از سناریوها اعمال میکنیم و نتایج برنامه را ارائه میکنیم. این مقاله با برخی بحث ها و پیشنهادات برای تحقیقات آتی در بخش 6 به پایان می رسد .
2. چارچوب سیستم
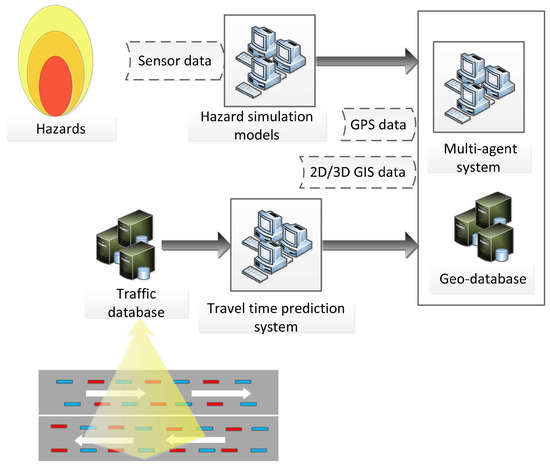
شکل 1 چارچوبی را نشان می دهد که ما برای ادغام اطلاعات ترافیک در مسیریابی طراحی می کنیم. این چارچوب ترکیبی از فناوری عامل، یک پایگاه داده جغرافیایی، شبیهسازی خطر و سیستم پیشبینی زمان سفر است. در هلند، اطلاعات ترافیک بلادرنگ را می توان از انواع مختلف دستگاه های اندازه گیری ترافیک (به عنوان مثال، آشکارسازهای حلقه و دوربین های ویدئویی) و برنامه های تلفن هوشمند مانند WAZE جمع آوری کرد [26 ]]. هنگامی که حوادث رخ می دهد، آنها همچنین داده های ترافیکی زنده شبکه های حمل و نقل تحت تأثیر خطرات را ارائه می دهند. اطلاعات ترافیک بیدرنگ از طریق بخشهای عمومی و خصوصی، مانند Rijkswaterstaat (وزارت زیرساخت و محیطزیست هلند) و ANWB (باشگاه گردشگری سلطنتی هلند) ارائه میشود و در پایگاه داده ترافیک ذخیره میشود. این اطلاعات به سیستم پیش بینی زمان سفر برای پیش بینی زمان سفر شبکه های حمل و نقل در آینده نزدیک وارد می شود. دادههای حسگر در مورد خطرات از میدان جمعآوری میشوند و برای هدایت سیستمهای شبیهسازی خطر استفاده میشوند. مدلهای خطر پیشبینی حرکت موانع متحرک را ایجاد میکنند. در این چارچوب، ما از فناوری عامل برای پردازش و تجزیه و تحلیل دادههای مدلهای خطر استفاده میکنیم. و ما از یک پایگاه داده جغرافیایی برای ذخیره داده هایی که برای مسیریابی ضروری هستند استفاده می کنیم. دادههای GIS دو بعدی و سهبعدی در سیستمهای پایگاه داده جغرافیایی همراه با دادههای GPS از میدان، ساختار یافته و ذخیره میشوند. انواع مختلفی از عامل ها برای تبدیل داده ها از منابع مختلف به فرمت استاندارد GIS و استخراج اطلاعات مکانی-زمانی شبکه جاده ها (به عنوان مثال، چه زمانی و چه جاده هایی تحت تأثیر موانع متحرک قرار خواهند گرفت) توسعه یافته اند. الگوریتمهای مسیریابی با استفاده از اطلاعات موانع متحرک و شرایط ترافیکی، مسیرهای امکانپذیر را محاسبه میکنند که به پاسخدهندگان پیشنهاد میشود تا ضمن اجتناب از موانع متحرک، از آنها برای رسیدن به مقصد استفاده کنند. انواع مختلفی از عامل ها برای تبدیل داده ها از منابع مختلف به فرمت استاندارد GIS و استخراج اطلاعات مکانی-زمانی شبکه جاده ها (به عنوان مثال، چه زمانی و چه جاده هایی تحت تأثیر موانع متحرک قرار خواهند گرفت) توسعه یافته اند. الگوریتمهای مسیریابی با استفاده از اطلاعات موانع متحرک و شرایط ترافیکی، مسیرهای امکانپذیر را محاسبه میکنند که به پاسخدهندگان پیشنهاد میشود تا ضمن اجتناب از موانع متحرک، از آنها برای رسیدن به مقصد استفاده کنند. انواع مختلفی از عامل ها برای تبدیل داده ها از منابع مختلف به فرمت استاندارد GIS و استخراج اطلاعات مکانی-زمانی شبکه جاده ها (به عنوان مثال، چه زمانی و چه جاده هایی تحت تأثیر موانع متحرک قرار خواهند گرفت) توسعه یافته اند. الگوریتمهای مسیریابی با استفاده از اطلاعات موانع متحرک و شرایط ترافیکی، مسیرهای امکانپذیر را محاسبه میکنند که به پاسخدهندگان پیشنهاد میشود تا ضمن اجتناب از موانع متحرک، از آنها برای رسیدن به مقصد استفاده کنند.
3. طراحی پایگاه داده های جغرافیایی
در این مطالعه، مدل داده ارائه شده در [ 7 ] را برای ذخیره اطلاعات موقعیت های ترافیکی گسترش می دهیم. شکل 2نمودار کلاس منطقی مدل داده ما را نشان می دهد. دادههای مربوط به حوادث ترافیکی، پاسخدهندگان و شبکه جادهای به ترتیب در رنگهای زرد، خاکستری روشن و سبز روشن هستند. دیتایپ های جدید تعریف شده به رنگ آبی روشن هستند. کلاس RealIncident برای ذخیره اطلاعات حوادث واقعی استفاده می شود. این کلاس با دو کلاس مرتبط است که تأثیر حوادث را پیشبینی میکنند: (1) HazardSimulationEvent، که شبیهسازی خطر را توصیف میکند. و (2) TrafficSimulationEvent، که جریان های ترافیکی را در طول حوادث شبیه سازی می کند. ما اطلاعات در دسترس بودن جاده ها را از نتایج شبیه سازی خطر، با استفاده از عملیات تقاطع فضایی [ 7] به دست می آوریم.]. برای تسهیل این امر، ما یک شبکه جاده بزرگ را به RoadNetworks کوچکتر تقسیم می کنیم. هر RoadNetwork از RoadSegments تشکیل شده است که شامل انواع مختلفی از جادهها میشود که توسط وسایل نقلیه امدادی قابل دسترسی هستند، مانند خیابانهای شهر، بزرگراهها و جادههای فرعی. در مدل توسعهیافته، ما ویژگیهای جدید travel_time_list و travel_speed_list را به هر RoadSegment متصل میکنیم تا به ترتیب زمان سفر و سرعت سفر را که در طول زمان تغییر میکنند ذخیره کنیم. در این مطالعه، ما خط زمانی را به دوره های زمانی کوچک تقسیم می کنیم و دو نوع داده جدید ایجاد می کنیم: TT_Of_TimePeriod و TS_Of_TimePeriod. TT_Of_TimePeriod زمان سفر مربوط به دوره زمانی [start_time, end_time] را ذخیره می کند و TS_Of_TimePeriod سرعت سفر دوره زمانی [start_time, end_time] را ثبت می کند. توجه داشته باشید که در این مقاله، ما فرض میکنیم که هم اطلاعات زمان واقعی و هم اطلاعات زمان سفر پیشبینیشده جادهها در این بازههای زمانی در دسترس هستند و توسط نرمافزار یا سیستمهای خارجی بهروزرسانی میشوند. سرعت حرکت هر بخش از جاده بر اساس زمان سفر و طول مسیر مربوطه به دست می آید، یعنی: t r a v e l _ s p e e d= l e n gt h / t r a v e l _ t i m eتی�آ�هل_سپههد=له��تیساعت/تی�آ�هل_تیمنمتره. برای ذخیره اطلاعات دورههای زمانی که RoadSegment و RoadJunction توسط موانع متحرک مسدود میشوند، از ویژگی affected_time_list استفاده میشود که از لیستی از AffectedTimePeriod تشکیل شده است. کلاس Vehicle اطلاعات وسایل نقلیه را ذخیره می کند و با Route مرتبط است. یک مسیر از مجموعه ای از RoadSegments تشکیل شده است. از آنجایی که بین RoadSegment و Route یک ارتباط بسیار به چند وجود دارد، کلاسی به نام RoadSegment_to_Route برای نمایش این رابطه استفاده می شود. همانطور که در [ 10]، در برخی موقعیتها، مانند ستونها، پاسخدهندگان میتوانند مدت کوتاهی منتظر بمانند تا از موانع متحرک اجتناب کنند. بنابراین، اطلاعات گزینه های انتظار نیز در مدل داده ساختار یافته است. در تحقیق ما، فرض میکنیم که گزینههای انتظار در گره مبدا بخشهای جاده مجاز هستند. هر گزینه انتظار با یک جفت ویژگی نشان داده می شود: beginWaitingTime (زمانی که انتظار شروع می شود) و endWaitingTime (زمانی که انتظار به پایان می رسد).
4. الگوریتم مسیریابی
در این مطالعه، هدف ما ارائه سریعترین مسیرهایی است که از موانع متحرک ناشی از حوادث جلوگیری میکند و به مسائل ادغام اطلاعات ترافیک (TI) در مسیریابی برای اولین پاسخدهندگان میپردازیم. برای محاسبه مسیرهای جلوگیری از موانع در شبکه ترافیک، یک الگوریتم A* اجتناب از مانع متحرک (MOAAstar) را بر اساس الگوریتم ارائه شده در [ 25 ] طراحی و توسعه میدهیم. این الگوریتم MOAAstar–TI نام دارد. در MOAAstar–TI، پارامتر s p e e dسپههدوسایل نقلیه حذف می شود و ما یک تابع جدید می سازیم که از سرعت واقعی و پیش بینی شده جاده ها برای تخمین زمان رسیدن گره ها استفاده می کند. در مواقع اضطراری، خودروهای معمولی قرار است مکانی را برای وسایل نقلیه اورژانس ایجاد کنند. علاوه بر این، اولین پاسخ دهندگان می توانند در مواقع اضطراری از آژیر یا شانه های جاده ها استفاده کنند. این به وسایل نقلیه امدادی اجازه می دهد تا سریعتر از سرعت متوسط وسایل نقلیه معمولی حرکت کنند. بنابراین، در الگوریتم، ما یک عامل تنظیم سرعت α را معرفی میکنیم تا میزان سرعت حرکت خودرو را نشان دهیم. در این مقاله ضریب تنظیم سرعت αبا نسبت سرعت بلادرنگ وسیله نقلیه به میانگین سرعت پیش بینی شده جریان ترافیک تعریف می شود. این عامل الگوریتم را قادر میسازد تا سرعت وسیله نقلیه را برای هر جاده تنظیم کند تا مسیرهای سفارشیسازی شده را با در نظر گرفتن جریانهای ترافیکی و وضعیت خودروی نجات در نظر بگیرد. ما فرض می کنیم که شبکه جاده با یک نمودار G که از مجموعه محدودی از گره های N و لبه های E تشکیل شده است نشان داده می شود . لبه بین دو گره x و y با نشان داده می شود x yایکس�. طول لبه x yایکس�با نشان داده می شود wx y�ایکس�. بر اساس مفهوم فواصل ایمن [ 27 ، 28 ]، فهرست تاثیر_زمان_که زمان آسیب دیده بخشهای جاده و تقاطعها را ذخیره میکند به مجموعهای از فواصل باز تبدیل میشود. اسه= (پ1، . . . ،پj، . . . ،پجیاسه=(پ1،…،پ�،…،پجی)، جایی که پj= [تیایکسo j،تیایکسج ج]پ�=[تی��ایکس،تیج�ایکس]j امین فاصله گره x است ، تیo jتی��زمان شروع است پjپ�، و تیج جتیج�زمان پایان است پjپ�. در الگوریتم، هر حالت s با گره x و یک بازه باز مرتبط با این گره تعریف می شود.( x _پj)(ایکس،پ�).
4.1. توضیحات الگوریتم
شکل 3 ساختار اصلی الگوریتم MOAAstar–TI را نشان می دهد. با پیروی از اصل اساسی الگوریتم کلاسیک A*، الگوریتم توسعهیافته وضعیت ( ها ) را با کمترین هزینه انتخاب میکند، آن را برای تولید جانشینان خود گسترش میدهد و از آنها برای به روز رسانی استفاده میکند. o p e n Se t�په�اسهتی. در نسل جانشینان ( شکل 4 )، الگوریتم ابتدا اولین ها را استخراج می کند s t a r t _ t i m eستیآ�تی_تیمنمتره(خط 8، شکل 4 )، و سپس زمان رسیدن احتمالی به گره بعدی y را از طریق لبه تخمین می زند.x yایکس�. در این مقاله یک تابع جدید را معرفی می کنیم Es t i m a t e _ a r r i v a l _ t i m e ( s t a r t _ t i m e , x y)�ستیمنمترآتیه_آ��من�آل_تیمنمتره(ستیآ�تی_تیمنمتره،ایکس�)(خط 9، با رنگ سبز در شکل 4 نشان داده شده است ) که می تواند از سرعت حرکت لبه ها برای تخمین زمان رسیدن به گره y از گره x استفاده کند . شکل 5 مراحل تابع تخمین را نشان می دهد. خودرو شروع به حرکت با توجه به s t a r t _ t i m eستیآ�تی_تیمنمتره. سرعت سفر تیاسلتیاسللبه از TT_Of_TimePeriod مربوط به بازه l استخراج می شود . از خط 5 تا خط 10 ( شکل 5 )، تابع محاسبه می کند که وسیله نقلیه چقدر می تواند در لبه حرکت کند. x yایکس�با سرعت در بازه l ، یعنی ( t r a v e l _ e n d_ تتی�آ�هل_ه�د_تی– t r a v e l _ s t a r t _ t ) × α ×تیاسلتی�آ�هل_ستیآ�تی_تی)×�×تیاسل. اگر هنوز مقداری مسافت برای طی کردن لبه وجود دارد x yایکس�، تابع مسافت باقیمانده و سرعت بازه زمانی بعدی را محاسبه می کند ( l + 1ل+1) استفاده خواهد شد. تابع همان مراحل را تکرار می کند تا زمانی که به گره y در یک بازه زمانی مشخص برسد و زمان رسیدن تخمینی را برمی گرداند ( EA T�آتی). اگر وسیله نقلیه بتواند با خیال راحت از لبه عبور کند x yایکس�قبل از اینکه لبه بسته شود و a r r i v a l _ t i m eآ��من�آل_تیمنمترهمشخص می شود که در یک بازه امن از گره y قرار دارد ، سپس الگوریتم حالت جدیدی ایجاد می کند س“س”(خط 13، شکل 4 ). حالت ایجاد شده س“س”به سادگی نادیده گرفته می شود اگر قبلاً در آن وجود داشته باشد c l o s e Se tجل�سهاسهتی. در غیر این صورت، از آن برای به روز رسانی استفاده می شود o p e n Se t�په�اسهتی.
4.2. تحلیل پیچیدگی زمانی
در این بخش، ما پیچیدگی زمانی الگوریتم MOAAstar–TI خود را با فرض تابع اکتشافی تخمین می زنیم. h ( n ) = 0ساعت(�)=0(بدترین حالت). اساساً، الگوریتم MOAAstar–TI را می توان به چهار بخش اصلی تقسیم کرد: (1) استخراج حالت با مقدار min در مجموعه باز (خط 7، شکل 3 ). (2) تخمین زمان رسیدن از یک گره از یک یال به دیگری (خط 9، شکل 4 ). (3) ایجاد یک حالت جدید مرتبط با یک گره (خط 11-16، شکل 4 ). و (4) درج یک حالت جدید و به روز رسانی مجموعه باز (خط 20-29، شکل 4 ). اجازه دهید | تی||تی|حداکثر تعداد بازههای باز که با گرهها و لبهها مرتبط هستند، و let | L ||�|تعداد بازه های زمانی باشد که سرعت های پیش بینی شده در آن قرار دارند. از آنجایی که هر حالت یک گره مربوط به یک بازه باز است، تعداد کل حالت ها برابر است | تی| ⋅ | ن||تی|·|ن|. با یک min-heap باینری، هر عملیات استخراج حالت با مقدار min زمان می برد O ( l g( | تی| ⋅ | ن| ) )�(ل�(|تی|·|ن|))و حداکثر وجود دارد | تی| ⋅ | ن||تی|·|ن|چنین عملیاتی بنابراین، کل زمان برای فراخوانی قسمت 1 است O ( | T| ⋅ | ن| ⋅ l گرم( | تی| ⋅ | ن| ) )�(|تی|·|ن|·ل�(|تی|·|ن|)). برای ایجاد حالت های جدید، هر لبه ای که از یک گره خاص خارج می شود و هر بازه مرتبط در تابع را بررسی می کنیم u p da t e O p e n Se t ( s )توپدآتیه�په�اسهتی(س). در تابع Es t i m a t e _ a r r i v a l _ t i m e ( s t a r t _ t i m e , x y)�ستیمنمترآتیه_آ��من�آل_تیمنمتره(ستیآ�تی_تیمنمتره،ایکس�)، هس من _ _ _�ساعتمنلهحلقه حداکثر تکرار می شود | L ||�|بار برای انجام محاسبه فاصله باقیمانده در امتداد لبه، هر یک از آنها O ( 1 )�(1)زمان. بنابراین، تابع دارای پیچیدگی محاسباتی است O ( | L | )�(|�|). با به دست آوردن زمان تخمینی رسیدن، بیش از حداکثر تکرار می کنیم | تی||تی|باز کردن فواصل برای ایجاد یک حالت جدید و وارد کردن آن به مجموعه باز (هزینهیابی O ( l g( | تی| ⋅ | ن| ) )�(ل�(|تی|·|ن|))زمان). چون حداکثر وجود دارد | تی| ⋅ | E||تی|·|�|آزمون های لبه، زمان اجرای فراخوانی قسمت 2، قسمت 3 و قسمت 4 می باشد O ( | T| ⋅ | E| ⋅ ( | L | + | T| + l g( | تی| ⋅ | ن| ) )�(|تی|·|�|·(|�|+|تی|+ل�(|تی|·|ن|)). به طور خلاصه، کل زمان اجرای الگوریتم است O ( | T| ⋅ | E| ⋅ ( | L | + | T| + l g( | تی| ⋅ | ن| ) ) + | تی| ⋅ | ن| ⋅ l گرم( | تی| ⋅ | ن| ) )�(|تی|·|�|·(|�|+|تی|+ل�(|تی|·|ن|))+|تی|·|ن|·ل�(|تی|·|ن|))یا O ( ( | E| + | ن| ) ⋅ l g( | N| ) + | E| + | ن| )�((|�|+|ن|)·ل�(|ن|)+|�|+|ن|)اگر | تی||تی|و | L ||�|به عنوان ضرایب ثابت در نظر گرفته می شوند.
5. مطالعه موردی
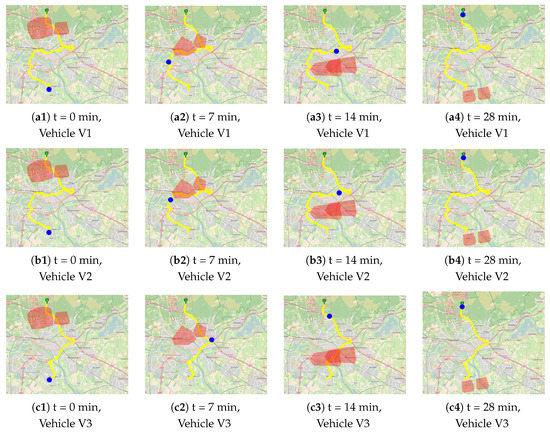
برای استفاده از اطلاعات ترافیک برای مسیریابی در میان موانع متحرک، ما سیستم ناوبری مبتنی بر چند عامل را که در مطالعه قبلی [ 29 ] توسعه یافته بود، با ادغام الگوریتم A* توسعه یافته MOAAstar-TI (ارائه شده در بخش 4 ) تطبیق دادیم. مدل داده های مکانی پیشنهادی در پایگاه داده رابطه ای PostgreSQL با پسوند PostGIS [ 30] تحقق یافته است.]. ما سیستم خود را برای مجموعهای از سناریوهای ناوبری، با در نظر گرفتن یک مورد از تودههایی که بر شهر آرنهم در هلند تأثیر گذاشت، اعمال کردیم. ما مجموعه ای از موانع متحرک را برای شبیه سازی حرکت ستون ها ایجاد کردیم. مجموعه داده شبکه جاده ای آرنهم در آزمایش ها استفاده شد. این شبکه از 13336 قطعه جاده و 11712 تقاطع تشکیل شده است. برای آزمایش الگوریتم پیشنهادی با اطلاعات ترافیک، در این مطالعه، ما یک شبیهساز ترافیک ساختیم که اطلاعات پیشبینیشدهای را در مورد زمان سفر و سرعت سفر شبکه جادهای ارائه میدهد. شبیه ساز ترافیک از سرعت عادی اتومبیل ها (60 کیلومتر در ساعت) به عنوان سرعت متوسط استفاده می کند و سرعت جاده ها را از زمان t = 0 دقیقه تا زمان t = 60 دقیقه (فاصله زمانی = 1 دقیقه) به دنبال سرعت عادی تولید می کند. توزیع شکل 6عکس های فوری از حرکت موانع و جریان ترافیک را نشان می دهد. بر اساس سرعت های سفر شبیه سازی شده، سیستم ناوبری از الگوریتم پیشنهادی MOAAstar–TI برای محاسبه مسیرها استفاده می کند و نتایج محاسبه شده را از طریق یک نمایشگر دو بعدی که بر اساس OpenStreetMap ساخته شده است، به کاربران نمایش می دهد.
5.1. سناریو 1
شکل 7 سه مسیر محاسبه شده برای سه وسیله نقلیه (V1، V2 و V3) را توسط سیستم ما نشان می دهد. در جدول 2 ، نتایج محاسبهشده را ارائه میکنیم و نتایج محاسبهشده با استفاده از الگوریتم MOAAstar–TI ما و نتایج محاسبهشده با استفاده از الگوریتم MOAAstar-II ارائهشده در [ 25 ] را مقایسه میکنیم. ما فرض می کنیم که هر سه وسیله نقلیه باید از نقطه آبی به نقطه سبز حرکت کنند. از شکل 8 ، می بینیم که وسیله نقلیه امدادی V1 ( α= 1) که از سرعت متوسط جریان ترافیک پیروی می کند می تواند سرعت آن را در طول مسیر خود تغییر دهد. همانطور که در جدول نشان داده شده است، مسافت سفر مسیرهای محاسبه شده توسط الگوریتم MOAAstar-II برای وسایل نقلیه V2 و V3 کوتاهتر از مسیر V1 محاسبه شده توسط MOAAstar–TI است، اما زمان بیشتری طول می کشد تا وسایل نقلیه پاسخگو به مقصد برسند. مقصد به دلیل عدم توجه به جریان ترافیک. توجه داشته باشید که چون سرعت حرکت خودروهای امدادی را میتوان به میزان قابل توجهی با جریانهای ترافیکی کاهش داد، بدون در نظر گرفتن شرایط ترافیکی، امدادگران میتوانند در حین حرکت تحت تأثیر خطرات قرار بگیرند و یا مسیرهای امنی به سمت مقصد نداشته باشند.
5.2. سناریو 2
در این سناریو، ما تأثیر ضریب تنظیم سرعت ( α ) را بر محاسبه مسیر نشان میدهیم. جدول 3 نتایج مسیر محاسبه شده توسط MOAAstar–TI را برای سه وسیله نقلیه (V1، V2 و V3) نشان می دهد. سه مقدار از ضریب تنظیم سرعت برای وسایل نقلیه درگیر تنظیم شده است، به عنوان مثال، α = 1 ، 1.3 ، 1.6�=1،1.3،1.6. هرچه α بالاتر باشد، وسیله نقلیه می تواند سریعتر نسبت به سرعت متوسط جریان ترافیک حرکت کند. همانطور که از جدول می بینیم، الگوریتم ما سه مسیر مختلف برای وسایل نقلیه ایجاد می کند و زمان های انتظار متفاوتی برای وسایل نقلیه برای اجتناب از مانع متحرک استفاده می شود. شکل 9 مسیرهای محاسبه شده و همچنین حرکت وسایل نقلیه در طول مسیر خود را نشان می دهد. اگرچه بین مسیر V1 تفاوت جزئی وجود دارد ( α = 1�=1) و مسیر V2 ( α = 1.3�=1.3)، وسیله نقلیه V3 با α = 1.6�=1.6می تواند مسیر کاملا متفاوتی را طی کند که به آن اجازه می دهد کمترین زمان سفر را برای رسیدن به مقصد صرف کند. با استفاده از ضریب تنظیم سرعت، الگوریتم ما میتواند اطلاعات موقعیتهای واقعی وسایل نقلیه را در مسیریابی قرار دهد و مسیرهای اجتناب از موانع را برای پاسخدهندگان سفارشیسازی کند، که پاسخ آنها به حوادث ترافیکی بزرگ را تسهیل میکند.
6. نتیجه گیری
این مقاله به بررسی ادغام اطلاعات ترافیک در برنامه ریزی مسیر در حضور موانع متحرک می پردازد. ما مدل داده های قبلی خود را از [ 7]، معرفی انواع داده ها و ویژگی های جدید برای ساختار اطلاعات ترافیک و گزینه های انتظار برای جلوگیری از موانع متحرک. گونهای از الگوریتم A* اجتناب از موانع متحرک، MOAAstar-TI، توسعه داده شده است تا به سرعت سفر در زمان واقعی و پیشبینیشده جادهها رسیدگی کند، و با دادههای مصنوعی جریان ترافیک در یک شبکه واقعی آزمایش شد. نتایج آزمایش در زمینه ستونهای سمی اهمیت اطلاعات ترافیکی را در تولید مسیرهایی نشان میدهد که از چنین ستونهایی اجتناب میکنند. توجه داشته باشید که رویکرد ما کلی است و محدود به مورد پلمز نیست. همچنین می تواند برای انواع دیگر خطرات مانند آتش سوزی و سیل نیز اعمال شود.
با وجود پتانسیل رویکرد ما، برخی از مسائل عملی هنوز باید ذکر و پرداخته شود. اولاً، در حال حاضر ارتباط مستقیمی بین سیستم ما و سیستم پیشبینی زمان سفر وجود ندارد که بتوان با اطلاعات ترافیک در زمان واقعی هدایت شود. در این مقاله، فرض میکنیم که دادههای جریان ترافیک توسط یک سیستم شبیهسازی ترافیک خارجی بهدست آمده و ارائه میشوند. ثانیاً، در این مطالعه فرض بر این است که دادههای زمان سفر کل شبکه راه در دسترس است. با این وجود، به دلیل کمبود دستگاههای نظارت بر جادهها، برخی از جادهها ممکن است هیچ داده تاریخی یا لحظهای در مورد جریان ترافیک نداشته باشند. در این مورد، سرعت وسیله نقلیه هنوز مورد نیاز است و در فرآیند برنامه ریزی مسیر ادغام می شود. سوم، به دلیل محدودیت زمانی در واکنش به حادثه، زمان محاسبه الگوریتم یک عامل حیاتی در ارزیابی سیستم است و ممکن است با شبکههای جادهای مختلف متفاوت باشد. بنابراین، آزمایشهای بیشتری برای ارزیابی عملکرد الگوریتم ما در شبکههای جادهای مختلف مورد نیاز است. در نهایت، سیستم ما بر اساس یک سرور مرکزی است که برای حفظ تمام داده های ضروری برای مسیریابی استفاده می شود و خدمات محاسبه مسیر را برای وسایل نقلیه در میدان ارائه می دهد. این رویکرد به شدت به در دسترس بودن شبکه ارتباطی بستگی دارد. بررسی نقش شبکه ارتباطی در مسیریابی از حوصله این مقاله خارج است. که برای حفظ تمام داده های ضروری برای مسیریابی استفاده می شود و خدمات محاسبه مسیر را برای وسایل نقلیه در میدان ارائه می دهد. این رویکرد به شدت به در دسترس بودن شبکه ارتباطی بستگی دارد. بررسی نقش شبکه ارتباطی در مسیریابی از حوصله این مقاله خارج است. که برای حفظ تمام داده های ضروری برای مسیریابی استفاده می شود و خدمات محاسبه مسیر را برای وسایل نقلیه در میدان ارائه می دهد. این رویکرد به شدت به در دسترس بودن شبکه ارتباطی بستگی دارد. بررسی نقش شبکه ارتباطی در مسیریابی از حوصله این مقاله خارج است.
در کار آینده، ما میخواهیم از یک مدل ستونی (مثلا [ 31 ]) برای آزمایش سیستم خود استفاده کنیم و آن را با یک سیستم پیشبینی زمان سفر برای پیشبینی جریان ترافیک در مورد تودههای سمی ترکیب کنیم. زیرا عدم قطعیت ها می توانند در نتایج سیستم پیش بینی دخیل باشند و بر رفتار مسافران تأثیر بگذارند [ 32]، همچنین بررسی مسیریابی با زمان سفر نامشخص ضروری است. یکی از راه حل های ممکن، معرفی عامل دیگری است که می توان آن را بر اساس عدم قطعیت های سرعت پیش بینی شده تنظیم کرد و به تخمین زمان سفر جاده ها اضافه کرد. علاوه بر این، ما کمک ناوبری را برای کاربران عادی جاده در هنگام مدیریت حوادث ترافیکی مطالعه خواهیم کرد. از یک طرف، حوادث بزرگ (مثلاً با مواد خطرناک) در بزرگراه یا نزدیک آن تأثیر مستقیمی بر ایمنی افرادی دارد که از نزدیک محل حادثه عبور می کنند یا در منطقه اطراف زندگی می کنند. این حوادث همچنین می تواند باعث اختلال در ترافیک شود که می تواند بر حرکت وسایل نقلیه در جاده ها تأثیر بگذارد. از سوی دیگر، مرکز مدیریت ترافیک می تواند به طور مستقیم اقدامات موثر ترافیکی را انجام دهد، به عنوان مثال، انسداد جاده های خاص. این اطلاعات میتواند توسط سرویسهای اطلاعات ترافیک توزیع شود تا اطلاعات سفر دقیقی را برای کاربران جاده فراهم کند و حتی میتواند در سیستمهای ناوبری مسیر ادغام شود تا مسیرهای رانندگی جایگزینی برای وسایل نقلیه در بزرگراه فراهم کند. همچنین میتوان این اطلاعات را با شهروندانی که در کنار بزرگراه زندگی میکنند به اشتراک گذاشت تا مسیرهای تخلیه را در تلفنهای هوشمند خود ارائه دهند. علاوه بر این، برخی از موارد ناوبری خاص باید در تحقیقات آینده در نظر گرفته شوند. به عنوان مثال، در طول مدیریت یک حادثه، پاسخ دهندگان ممکن است مجبور شوند به نقطه خاصی بروند که دقیقاً در داخل خطر قرار دارد. اگر پاسخ دهندگان بیشتر و مقاصد پویا تری درگیر باشند، این وضعیت می تواند پیچیده تر شود [ و حتی می تواند در سیستم های ناوبری مسیر ادغام شود تا مسیرهای رانندگی جایگزین را برای وسایل نقلیه در بزرگراه فراهم کند. همچنین میتوان این اطلاعات را با شهروندانی که در کنار بزرگراه زندگی میکنند به اشتراک گذاشت تا مسیرهای تخلیه را در تلفنهای هوشمند خود ارائه دهند. علاوه بر این، برخی از موارد ناوبری خاص باید در تحقیقات آینده در نظر گرفته شوند. به عنوان مثال، در طول مدیریت یک حادثه، پاسخ دهندگان ممکن است مجبور شوند به نقطه خاصی بروند که دقیقاً در داخل خطر قرار دارد. اگر پاسخ دهندگان بیشتر و مقاصد پویا تری درگیر باشند، این وضعیت می تواند پیچیده تر شود [ و حتی می تواند در سیستم های ناوبری مسیر ادغام شود تا مسیرهای رانندگی جایگزین را برای وسایل نقلیه در بزرگراه فراهم کند. همچنین میتوان این اطلاعات را با شهروندانی که در کنار بزرگراه زندگی میکنند به اشتراک گذاشت تا مسیرهای تخلیه را در تلفنهای هوشمند خود ارائه دهند. علاوه بر این، برخی از موارد ناوبری خاص باید در تحقیقات آینده در نظر گرفته شوند. به عنوان مثال، در طول مدیریت یک حادثه، پاسخ دهندگان ممکن است مجبور شوند به نقطه خاصی بروند که دقیقاً در داخل خطر قرار دارد. اگر پاسخ دهندگان بیشتر و مقاصد پویا تری درگیر باشند، این وضعیت می تواند پیچیده تر شود [ در طول مدیریت یک حادثه، پاسخ دهندگان ممکن است مجبور شوند به نقطه خاصی بروند که دقیقاً در داخل خطرات قرار دارد. اگر پاسخ دهندگان بیشتر و مقاصد پویا تری درگیر باشند، این وضعیت می تواند پیچیده تر شود [ در طول مدیریت یک حادثه، پاسخ دهندگان ممکن است مجبور شوند به نقطه خاصی بروند که دقیقاً در داخل خطرات قرار دارد. اگر پاسخ دهندگان بیشتر و مقاصد پویا تری درگیر باشند، این وضعیت می تواند پیچیده تر شود [33 ]. رویکردهای جدیدی برای رسیدگی به این مشکلات ناوبری مورد نیاز است.
منابع
- استین بروگن، جی. Borzacchiello، MT; Nijkamp، P. شولتن، اچ. دادههای شبکههای مخابراتی برای مدیریت حادثه: یک بررسی اکتشافی در مورد ایمنی و امنیت حملونقل. ترانسپ سیاست 2013 ، 28 ، 86-102. [ Google Scholar ] [ CrossRef ]
- استین بروگن، جی. Nijkamp، P. Van der Vlist، M. مدیریت حوادث ترافیک شهری در جامعه دیجیتال: رویکرد شبکه ای بازیگر در استفاده از فناوری اطلاعات در اروپای شهری. تکنولوژی پیش بینی. Soc. چانگ. 2014 ، 89 ، 245-261. [ Google Scholar ] [ CrossRef ]
- ندکوف، اس. Zlatanova، S. فعال کردن اجتناب از موانع برای سرویس ناوبری نقشه های گوگل. در مجموعه مقالات هفتمین کنفرانس اطلاعات جغرافیایی برای مدیریت بلایا، آنتالیا، ترکیه، 3 تا 8 مه 2011.
- Gunawan، LT Crowdsourceed Dister Response برای نقشه برداری و راهیابی موثر. دکتری پایان نامه، دانشگاه صنعتی دلفت، دلفت، هلند، 2013. [ Google Scholar ]
- نیس، پ. سینگر، پی. Zipf، A. نقشه برداری مشترک و مسیریابی اضطراری برای مطالعات موردی لجستیک بلایا از زلزله هائیتی و پورتال سازمان ملل برای آفریقا. در مجموعه مقالات تقاطع جغرافیایی @ GI_Forum، سالزبورگ، اتریش، 6-9 ژوئیه 2010; جلد 10.
- Chitumalla، PK; هریس، دی. تورایسینگهام، بی. Khan, L. برنامه های کاربردی واکنش اضطراری: مدل سازی ستون پویا و مسیریابی بلادرنگ. محاسبات اینترنتی IEEE. 2008 ، 12 ، 38-44. [ Google Scholar ] [ CrossRef ]
- وانگ، ز. زلاتانوا، اس. مورنو، آ. ون اوستروم، پی. تورو، سی. یک مدل داده برای برنامه ریزی مسیر در مورد آتش سوزی جنگل. محاسبه کنید. Geosci. 2014 ، 68 ، 1-10. [ Google Scholar ] [ CrossRef ]
- میوک، دی. آنتون، اف. لیانگ، جی. تحلیل شبکه خیابانی آنلاین برای برنامه ریزی تخلیه سیل. در فن آوری های سنجش از دور و GIS برای پایش و پیش بینی بلایا ; Nayak, S., Zlatanova, S., Eds. Springer: برلین، آلمان، 2008; ص 219-242. [ Google Scholar ]
- Visser, I. تعیین مسیر در مناطق فاجعه. پایان نامه کارشناسی ارشد، دانشگاه اوترخت، اوترخت، هلند، 2009. [ Google Scholar ]
- وانگ، ز. زلاتانوا، اس. یک رویکرد جستجوی مبتنی بر A* برای ناوبری در میان موانع متحرک. در سیستم های هوشمند مدیریت بحران ; Zlatanova, S., Peters, R., Dilo, A., Scholten, H., Eds. Springer: برلین/هایدلبرگ، آلمان، 2013; صص 17-30. [ Google Scholar ]
- راحتی، LK; کو، ک. Zagorecki، A. هماهنگی در سیستم های واکنش به بلایا در حال تکامل سریع نقش اطلاعات. صبح. رفتار علمی 2004 ، 48 ، 295-313. [ Google Scholar ] [ CrossRef ]
- چن، آر. شرمان، ر. رائو، منابع انسانی؛ Upadhyaya، SJ هماهنگی در مدیریت واکنش اضطراری. اشتراک. ACM 2008 ، 51 ، 66-73. [ Google Scholar ] [ CrossRef ]
- استین بروگن، جی. Nijkamp، P. اسمیتز، جی.ام. Grothe، M. مدیریت حوادث ترافیکی، تصویر عملیاتی مشترک برای حمایت از آگاهی موقعیتی از تحرک پایدار. بین المللی J. Transp. اقتصاد 2012 ، XXXIX ، 131-170. [ Google Scholar ]
- ون هینسبرگن، سی. هگی، ع. ون لینت، جی. وان زویلن، شبکههای عصبی بیزی H. برای پیشبینی زمان سفر تصادفی در شبکههای شهری. هوشمند ترانس. سیستم 2011 ، 5 ، 259-265. [ Google Scholar ] [ CrossRef ]
- ون لینت، جی. هوگندورن، اس. Van Zuylen، H. پیشبینی دقیق زمان سفر آزادراه با شبکههای عصبی فضای حالت تحت دادههای از دست رفته. ترانسپ Res. سی ظهور. تکنولوژی 2005 ، 13 ، 347-369. [ Google Scholar ] [ CrossRef ]
- ون هینسبرگن، CI; ون لینت، جی. ون زویلن، کمیته شبکه های عصبی اچ بیزی برای پیش بینی زمان سفر با فواصل اطمینان. ترانسپ Res. سی ظهور. تکنولوژی 2009 ، 17 ، 498-509. [ Google Scholar ] [ CrossRef ]
- لیو، اچ. ون لینت، اچ. ون زویلن، اچ. ژانگ، ک. دو روش متمایز برای استفاده از فیلترهای کالمن برای پیشبینی زمان سفر شریانی شهری. در مجموعه مقالات کنفرانس سیستم های حمل و نقل هوشمند IEEE 2006 ITSC ’06، تورنتو، ON، کانادا، 17-20 سپتامبر 2006. صص 845-850.
- یانگ، JS پیش بینی زمان سفر با استفاده از وسیله نقلیه آزمایشی GPS و تکنیک های فیلتر کالمن. در مجموعه مقالات کنفرانس کنترل آمریکایی IEEE 2005، پورتلند، OR، ایالات متحده آمریکا، 8 تا 10 ژوئن 2005. صص 2128–2133.
- واناجکشی، ال. Rilett, L. پشتیبان تکنیک ماشین برداری برای پیش بینی کوتاه مدت زمان سفر. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE 2007، استانبول، ترکیه، 13 تا 15 ژوئن 2007. صص 600–605.
- وو، CH; هو، جی.ام. Lee, DT پیشبینی زمان سفر با رگرسیون بردار پشتیبان. IEEE Trans Intel. ترانسپ سیستم 2004 ، 5 ، 276-281. [ Google Scholar ] [ CrossRef ]
- تو، اچ. ون لینت، اچ. Van Zuylen، H. اثرات تصادفات رانندگی بر قابلیت اطمینان زمان سفر. در مجموعه مقالات یازدهمین کنفرانس بین المللی IEEE در مورد سیستم های حمل و نقل هوشمند ITSC 2008، پکن، چین، 12 تا 15 اکتبر 2008. صص 79-84.
- فی، ایکس. لو، سی سی; لیو، ک. یک رویکرد مدل خطی پویا بیزی برای پیشبینی زمان سفر کوتاهمدت آزادراه. ترانسپ Res. سی ظهور. تکنولوژی 2011 ، 19 ، 1306-1318. [ Google Scholar ] [ CrossRef ]
- فی، ایکس. ژانگ، ی. لیو، ک. مدل خطی دینامیکی گوا، ام بیزی با سوئیچینگ برای پیشبینی زمان سفر کوتاهمدت آزادراه با دادههای تشخیص پلاک. J. Transp. مهندس 2013 ، 139 ، 1058-1067. [ Google Scholar ] [ CrossRef ]
- لی، CS; Chen, MC یک رویکرد مبتنی بر داده کاوی برای پیشبینی زمان سفر در آزادراه با تراکم غیر مکرر. محاسبات عصبی 2014 ، 133 ، 74-83. [ Google Scholar ] [ CrossRef ]
- وانگ، Z. برنامه ریزی مسیر برای اولین پاسخ دهندگان در حضور موانع متحرک. دکتری پایان نامه، دانشگاه صنعتی دلفت، دلفت، هلند، 2015. [ Google Scholar ]
- WAZE. در دسترس آنلاین: www.waze.com (دسترسی در 15 مارس 2017).
- فیلیپس، ام. لیخاچف، ام. SIPP: برنامه ریزی مسیر بازه ای ایمن برای محیط های پویا. در مجموعه مقالات کنفرانس بین المللی IEEE 2011 در مورد رباتیک و اتوماسیون (ICRA)، شانگهای، چین، 9 تا 13 مه 2011. صص 5628–5635.
- نارایانان، وی. فیلیپس، ام. لیخاچف، ام. برنامه ریزی مسیر بازه ای ایمن هر زمان برای محیط های پویا. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2012 در مورد ربات ها و سیستم های هوشمند (IROS)، ویلامورا-الگاروه، پرتغال، 7 تا 11 اکتبر 2012. صص 4708-4715.
- وانگ، ز. زلاتانووا، اس. زیرساخت های چند عاملی کمک به ناوبری برای اولین پاسخ دهندگان. در مجموعه مقالات ششمین کارگاه بین المللی ACM SIGSPATIAL در علم حمل و نقل محاسباتی IWCTS’13، اورلاندو، فلوریدا، ایالات متحده آمریکا، 5 تا 8 نوامبر 2013. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2013; صص 1-6. [ Google Scholar ]
- PostGIS. در دسترس آنلاین: www.postgis.org (دسترسی در 15 مارس 2017).
- زله، اچ. وایس، ای. میکا، Á. ون تیلبورگ، تی. مدلسازی ستون دود در مدیریت بحران. در سیستم های هوشمند مدیریت بحران ; Springer: برلین/هایدلبرگ، آلمان، 2013; صص 51-66. [ Google Scholar ]
- راموس، جنرال موتورز؛ دامن، دبلیو. Hoogendoorn, S. یک بررسی پیشرفته: تحولات در نظریه سودمندی، نظریه چشمانداز و نظریه پشیمانی برای بررسی رفتار مسافران در موقعیتهایی که شامل عدم قطعیت زمان سفر است. ترانسپ Rev. 2014 , 34 , 46-67. [ Google Scholar ] [ CrossRef ]
- وانگ، ز. زلاتانوا، S. طبقه بندی ناوبری برای اولین پاسخ دهندگان. در حال پیشرفت در خدمات مبتنی بر مکان . Krisp، JM، Ed. Springer: برلین/هایدلبرگ، آلمان، 2013; صص 297-315. [ Google Scholar ]
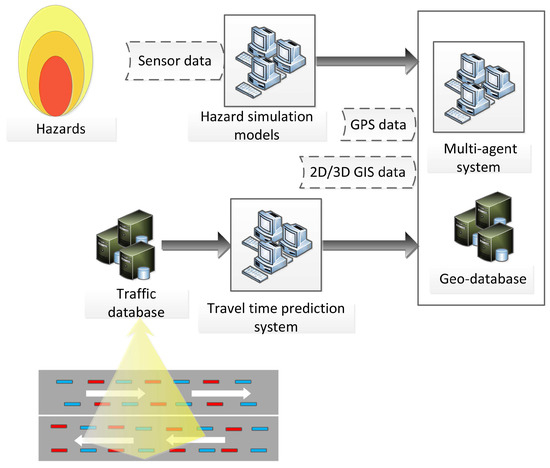
شکل 1. مروری بر چارچوب سیستم عمومی.

شکل 2. مدل داده های منطقی برای ذخیره اطلاعات زمان ترافیک.

شکل 3. ساختار الگوریتم MOAAstar–TI (اجتناب از مانع متحرک A* با استفاده از اطلاعات ترافیک).

شکل 4. UpdateOpenSet(ها).
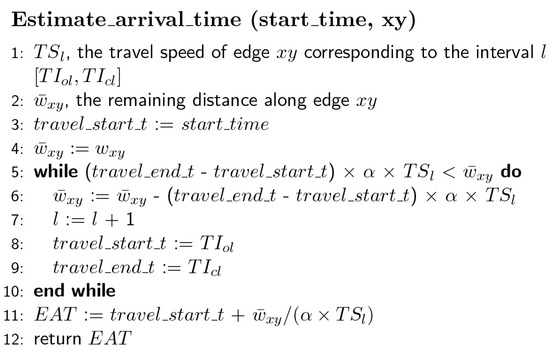
شکل 5. تابع برای تخمین زمان رسیدن.

شکل 6. تصاویری از حرکت موانع متحرک (در چند ضلعی های قرمز) و جریان ترافیک در زمان های مختلف.

شکل 7. مسیرهای محاسبه شده در سناریوی 1، از نقطه آبی تا نقطه سبز شروع می شود.
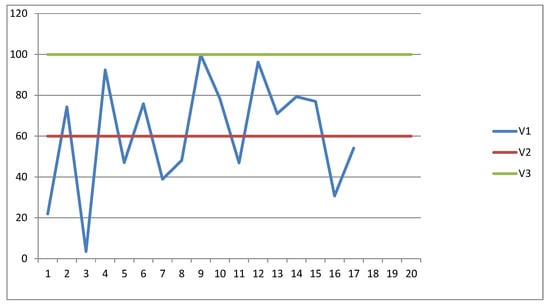
شکل 8. سرعت هایی که خودروهای امدادی (V1، V2 و V3) باید در مسیر خود طی کنند.
شکل 9. مسیرهای محاسبه شده برای سه وسیله نقلیه (V1، V2 و V3) در سناریوی 2، از نقطه آبی تا نقطه سبز شروع می شود.

جدول 1. دسته بندی اطلاعات برای مدیریت حوادث ترافیکی (استخراج شده از [ 2 ]).
جدول 2. نتایج محاسبه شده سناریوی 1.
جدول 3. نتایج محاسبه شده سناریوی 2.
© 2017 توسط نویسندگان. دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC BY) ( http://creativecommons.org/licenses/by/4.0/ ) توزیع شده است.
بدون نظر