


خلاصه
نظارت و ارزیابی منظم محصولات یکی از کلیدهای تولید بهینه محصول است. این تحقیق توسعه یک سیستم نظارتی به نام پلت فرم نظارت و ارزیابی محصول (C-MAP) را ارائه می دهد. C-MAP از یک واحد جمعآوری تصویر تشکیل شده است که یک وسیله نقلیه هوایی بدون سرنشین (UAV) مجهز به دوربین چند طیفی (نزدیک مادون قرمز، سبز، آبی) و یک جزء پردازش و تحلیل تصویر است. باغ تجربی سیب در مرکز تحقیقات و ترویج پارما در دانشگاه آیداهو به عنوان هدف برای نظارت و ارزیابی مورد استفاده قرار گرفت. پنج ردیف آزمایشی باغ به طور تصادفی با پنج روش مختلف آبیاری تیمار شدند. یک الگوریتم پردازش تصویر برای شناسایی درختان منفرد برای تسهیل تجزیه و تحلیل ردیف ها ایجاد شد و قادر به تشخیص بیش از 90 درصد درختان بود. تجزیه و تحلیل تصویری ردیفهای آزمایشی بر اساس شاخصهای پوشش گیاهی انجام شد و نتایج نشان داد که بین پنج روش مختلف آبیاری، تفاوت معنیداری در شاخص تفاوت نرمال شده گیاهی افزایش یافته (ENDVI) وجود دارد. این نشان می دهد که C-MAP دارای پتانسیل بسیار خوبی به عنوان یک ابزار نظارتی برای مدیریت باغ است.
کلید واژه ها:
سیب ؛ پردازش تصویر دیجیتال ; بینایی ماشین ؛ وسیله نقلیه هوایی بدون سرنشین (UAV) ؛ شاخص های پوشش گیاهی
1. معرفی
علیرغم وضعیت چالش برانگیز اقتصادی کشور، صنعت محصولات زراعی ویژه در آیداهو در حال رونق است. با توجه به اداره سرشماری ایالات متحده، پیش بینی می شود که جمعیت ایالات متحده تا سال 2060 34٪ رشد کند [ 1 ]. با افزایش جمعیت، نیاز به بهبود تولید و مدیریت محصولات کشاورزی به یک ضرورت تبدیل شده است]. ارائه فنآوریهای ارزانقیمت به کشاورزان که میتواند به آنها در مدیریت محصولاتشان کمک کند، به آنها کمک میکند تا کسبوکارشان را کارآمدتر پیش ببرند و محصولات ویژه آیداهو را در بازار رقابتیتر کنند. بهره وری در استفاده از نهاده های گیاهی مانند آب، مواد شیمیایی و کود به این معنی است که کمتر از این نهاده ها بر اساس نیاز محصول استفاده می شود. مزایای این کارایی هم اقتصادی و هم زیست محیطی خواهد بود.
سنجش از دور [ 3 ، 4 ] یکی از فناوریهایی است که در نظارت بر محصولات ردیفی علاقه زیادی به دست آورده است. داده های سنجش از دور به کشاورزان امکان نظارت بر سلامت و شرایط محصول را می دهد. به عنوان مثال، کلروفیل در گیاه سبز منعکس می شود در حالی که طول موج های قرمز و آبی را جذب می کند. تنش در گیاهان به معنای بازتاب زرد-قرمز بیشتر به دلیل محتوای کلروفیل و رنگدانه کمتر است [ 5 ]. از سوی دیگر، فروپاشی ساختاری یک سلول در حال مرگ ناشی از عفونت بیماری، بازتاب مادون قرمز نزدیک (NIR) کمتری دارد [ 6 ]. علاوه بر این، بازتاب در باند NIR با نیتروژن اعمال شده در این زمینه همبستگی دارد.
به طور معمول در سنجش از دور [ 7 ]، داده ها با استفاده از هواپیمای سرنشین دار نصب شده با دوربین مادون قرمز رنگی و تصویربرداری مبتنی بر ماهواره [ 8 ] به دست می آید. این سیستم به دلیل گران بودن، وضوح مکانی پایین (که به معنی دقت کمتر) و فرکانس نمونه برداری پایین است، به طور گسترده توسط کشاورزان استفاده نمی شود. اگرچه این سیستمها میتوانند در تصمیمگیری کشاورزان در مدیریت محصول تسهیل کنند، اما از نظر اقتصادی برای کاربرد محصولات تخصصی در آیداهو امکانپذیر نیست. یک پلت فرم مقرون به صرفه برای توسعه سنجش از دور برای محصولات ویژه بسیار مهم است.
این مقاله توسعه یک پلت فرم سنجش از راه دور، به نام پلت فرم نظارت و ارزیابی محصول (C-MAP) را برای پشتیبانی از نیازهای تخصصی نظارت بر محصول در آیداهو نشان می دهد. C-MAP سیستم پایش مزرعه ای ارزان، کارآمد، سریع و غیرتهاجمی را در صورت تقاضا در اختیار کشاورز قرار می دهد.
C-MAP به طور کلی از یک وسیله نقلیه هوایی بدون سرنشین کم هزینه (UAV) با ماژول حسگر متصل تشکیل شده است. این سنسور ماژولار است بنابراین میتوان آن را بر روی پلتفرم متحرک دیگری مانند تراکتور نیز نصب کرد. این یک سیستم سنجش از راه دور خواهد بود که داده ها را از راه دور بدست می آورد. با این حال، برخلاف فناوریهای سنجش از راه دور، به عنوان مثال، تصویربرداری ماهوارهای و هواپیماهای هوانوردی عمومی، دادههای محصول در ارتفاع کم و ویژگیهای مزرعه نزدیک به دست میآیند. C-MAP جایگزینی عملی برای این فناوری های گران قیمت سنجش از راه دور خواهد بود و بلافاصله برای کشاورزان قابل دسترسی است.
به طور مشخص، این تحقیق دارای اهداف زیر است:
-
برای به دست آوردن داده های سنجش از دور (تصاویر چند طیفی) از باغ های سیب با ورودی کنترل شده آبیاری (آب).
-
استفاده از تکنیک های پردازش تصویر برای پردازش تصاویر و تجزیه و تحلیل داده ها با استفاده از شاخص های پوشش گیاهی (VI).
2. مواد و روشها
2.1. باغ های هدف
باغ هدف یک باغ سیب تجربی است که در مرکز تحقیقات و توسعه پارما دانشگاه آیداهو در پارما، آیداهو واقع شده است که در بخش جنوب غربی ایالت آیداهو واقع شده است (شکل 1 ) . باغ سیب آزمایشی در بهار و تابستان 2002 تأسیس شد. درختان “رز پاییزی فوجی” روی پایه RN 29 (Nic 29) (کودستان حوضه کلمبیا، کوینسی WA، ایالات متحده آمریکا) در فاصله 1.52 × 4.27 متر با فاصله شرقی کاشته شدند. جهت گیری ردیف غربی سیب خرچنگ “Snow Drift” روی پایه RN 29 (C & O Nursery, Wenatchee, WA, USA) در هر ردیف به عنوان گرده افشان بین هر 10 درخت “Autumn Rose Fuji” کاشته شد. منطقه آزمایشی دارای آب و هوای نیمه خشک، با بارندگی سالانه حدود 297 میلی متر و خاک لومی شنی است. علف گندم کاکل دار ( Agropyron cristatum(L.) Gaertn.) که چمن مقاوم به خشکی است، در تمام تیمارها به عنوان پوشش کف باغ کاشته شد.
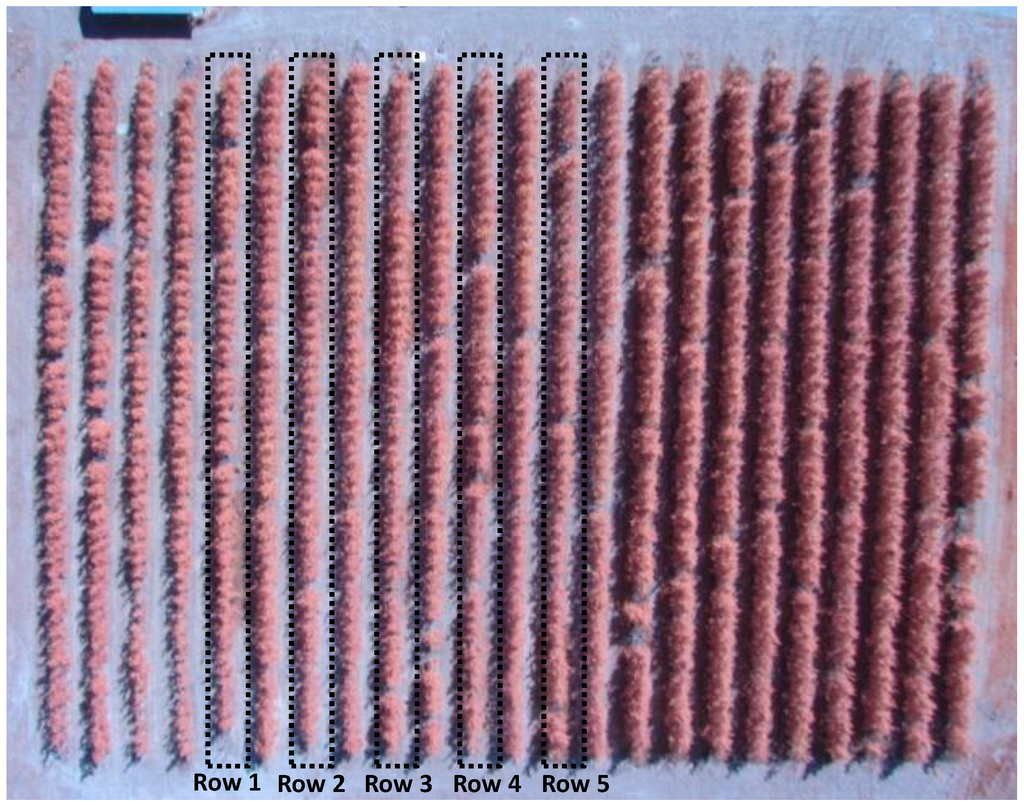
پنج روش مختلف تحویل آب برای تولید سیب در این مطالعه مقایسه شد: (الف) آبپاش کامل. (ب) آبپاش کسری 50%؛ (ج) قطره کسری 50%؛ (د) چکه کامل؛ و (ه) 65% قطره. پنج ردیف آزمایشی در باغ به عنوان ردیفهای کنترلشده انتخاب شدند. شکل 2 باغ هدف و پنج ردیف کنترل شده را نشان می دهد. هر ردیف مطابق با روش آبیاری به پنج گروه تقسیم شد و هر گروه از حدود شش تا هشت درخت تشکیل شده بود که در جدول 1 نشان داده شده است.. این روشهای مختلف آبیاری، استراتژیهای مدیریتی هستند که بر به حداکثر رساندن تولید تمرکز دارند. به منظور جداسازی ردیف های کنترل شده، درختان نگهبان بین گروه ها کاشته شد. هدف اصلی آنها این است که به عنوان یک مانع فیزیکی بین گروه ها عمل کنند، بنابراین داده های به دست آمده از هر گروه قابل اعتماد است.
2.2. سیستم هوایی بدون سرنشین
وسیله نقلیه هوایی بدون سرنشین (UAV) مورد استفاده در این مطالعه Mikrokopter OktokopterXL، یک پلت فرم هشت روتور [ 9 ] است. این پهپاد دارای کنترلر پرواز و ناوبری است که امکان ناوبری با کنترل از راه دور و ناوبری در ایستگاه بین راه GPS را فراهم می کند. یک ایستگاه زمینی که عمدتاً از یک رایانه شخصی با گیرنده تشکیل شده است، اطلاعات پرواز پهپاد مانند ارتفاع، سطح باتری، موقعیت و غیره را ارائه می دهد . ظرفیت بار پهپاد حدود یک کیلوگرم است که به پهپاد اجازه می دهد تا به تصویر مجهز شود. سیستم اکتساب شکل 3 پهپاد را با اجزای آن و شکل 4 پهپاد را بر روی باغ آزمایشی نشان می دهد. سیستم مورد استفاده در این مطالعه مشابه سایر سیستم هایی است که با استفاده از پهپادهای چند روتور تحقیقاتی انجام داده اند.10 ، 11 ، 12 ].
2.3. سیستم جذب تصویر
سیستم ثبت تصویر یک دوربین چند طیفی سه بانده است ( شکل 2 ). دوربین چند طیفی Canon PowerShot SX280 با 12.1 مگاپیکسل، یک حسگر مکمل نیمه هادی اکسید فلزی (CMOS) و یک لنز با زاویه باز 25 میلی متری است. فیلتر دوربین به گونهای اصلاح شد که به آن اجازه میدهد طول موجهای آبی و سبز را برای نوار مرئی و پهنای باند موج کوتاه مادون قرمز نزدیک (NIR) با مرکز ۷۵۰ نانومتر ثبت کند. دوربین چند طیفی دارای قابلیت فیلمبرداری اول شخص است که امکان مشاهده فیلم از روی زمین و همچنین گرفتن دستی تصویر را فراهم می کند. علاوه بر دوربین چند طیفی، یک دوربین GoPro نیز به این پهپاد متصل شده بود تا دادههای ویدیوی رنگی را جمعآوری کند.
2.4. تهیه تصویر
دریافت تصویر در 15 مه 2013 آغاز شد و در 14 ژوئیه 2013 به پایان رسید. تصاویر هر هفته جمع آوری می شد و بیشتر در ساعات صبح بین ساعت 9 صبح تا 12 بعد از ظهر انجام می شد. شرایط روز در طول هفته ها کمی متفاوت بود، اما بیشتر موارد داده ها در آسمان صاف گرفته شده است.
برای گرفتن تصویر با استفاده از پهپاد، از ابزار MikroKopter برای تنظیم پرواز استفاده شد. MikroKopter Tool یک برنامه ویندوزی است که به اپراتور اجازه می دهد تا تنظیمات پهپاد مانند ماژول کنترل پرواز و ماژول کنترل ناوبری را تنظیم کند. شکل 5 تصویری از MikroKopter On-Screen-Display را نشان میدهد که امکان برنامهریزی پرواز نقطهای را برای گرفتن تصویر فراهم میکند. نمایشگر روی صفحه همچنین داده های تله متری مانند ارتفاع، سرعت، مکان و سطح باتری را نشان می دهد. دو روش برای به دست آوردن تصویر وجود داشت: (1) یک ایستگاه منفرد در وسط میدان انتخاب شد و ارتفاع 100 متر تعیین شد. در آن ارتفاع، دوربین قادر بود از کل میدان، تقریباً 7000 متر مربع ، عکس بگیرد، در یک شات. (2) چندین ایستگاه بین راه در مناطق انتخاب شده قرار داده شد تا پهپاد در ارتفاع 50 متری بتواند تصاویری به دست آورد که پس از موزاییک کردن یک تصویر با وضوح بالا از کل باغ را بازسازی کند. شکل 6 نمونه تصویر چندطیفی از باغ هدف را نشان می دهد.
2.5. تحلیل داده ها
شکل 7 نمودار جریان روش شناسی کلی این مقاله را نشان می دهد. با گرفتن تصویر شروع می شود و به دنبال پیش پردازش تصویر انجام می شود. پیش پردازش تصویر، تصویر را به سه باند جدا می کند. تصویر چند طیفی به دست آمده از سه باند زیر تشکیل شده است: NIR موج کوتاه، سبز (G) و آبی (B). ردیفهای درختی با استفاده از باند NIR از زمین جدا میشوند و سپس یک الگوریتم پردازش تصویر برای شناسایی درختهای منفرد در هر ردیف آزمایشی ایجاد شد. شناسایی درخت بر اساس الگوریتم حوضه [ 13 ، 14 ]، یک روش تقسیم بندی برای جداسازی حباب های متصل بود. با استفاده از درختان قطعه بندی شده به عنوان ماسک تصویر و سه نوار، تصاویر با استفاده از شاخص های پوشش گیاهی (VI) نشان داده شده در جدول 2 تجزیه و تحلیل شدند.. Zakaluk و Ranjan [ 15 ] نیز از VI مشابه برای تجزیه و تحلیل تصاویر RGB گیاهان سیب زمینی استفاده کردند. سپس، VI از پیکسل های درختان منفرد از پنج ردیف آزمایشی محاسبه شد. مساحت تاج هر درخت (بر حسب پیکسل) نیز محاسبه شد. Matlab و جعبه ابزار Digital Image Processing برای پردازش و تحلیل تصویر استفاده شد.
3. نتایج و بحث
3.1. شناسایی درختان فردی
یک الگوریتم پردازش تصویر برای شناسایی درختان منفرد و تسهیل تجزیه و تحلیل شاخصهای پوشش گیاهی پنج روش آبیاری توسعه داده شد. الگوریتم با شناسایی ردیفهای جداگانه شروع میشود ( شکل 8). سپس ردیف قطعه بندی می شود و تقعر تاج درخت تشخیص داده می شود. بر اساس شکل درخت، ماکزیمم های ناحیه ای مشخص می شود و سپس از نتیجه برای تقسیم ردیف استفاده می شود. داده های تقسیم ردیف و تشخیص تقعر به عنوان ورودی به الگوریتم حوضه برای شناسایی نشانگرهای منفرد و جداسازی درختان منفرد استفاده می شود. در این مثال، 45 درخت از 49 درخت شناسایی شد. نتایج سایر ردیفهای آزمایشی نشان داد که بیش از 90 درصد درختان شناسایی شدند. سپس میانگین شاخص پوشش گیاهی تک تک درختان با استفاده از نتیجه شناسایی درخت به عنوان ماسک تصویر محاسبه شد.
3.2. تجزیه و تحلیل شاخص گیاهی
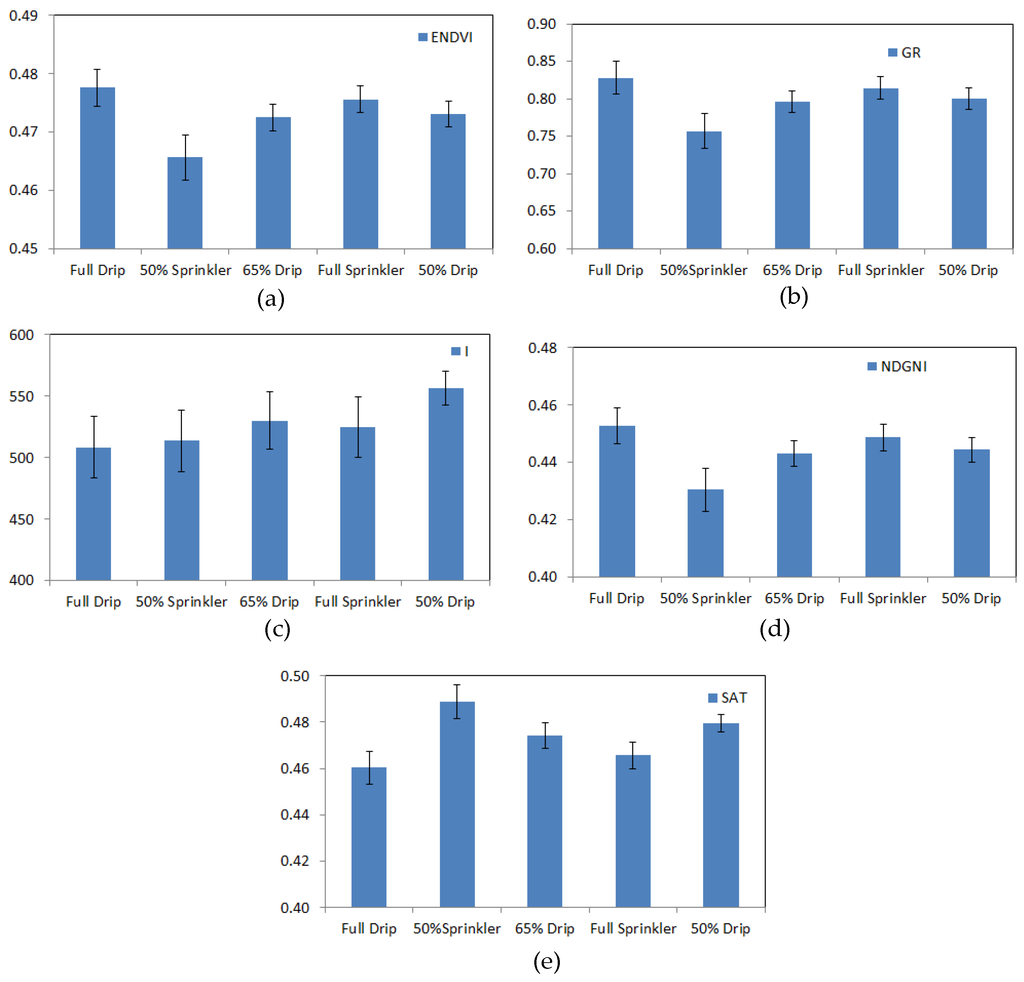
پنج شاخص پوشش گیاهی هر درخت محاسبه شد. شکل 9 ارتباط بین میانگین شاخص های پوشش گیاهی را با توجه به روش آبیاری نشان می دهد. این شاخصهای پوشش گیاهی مشابه برخی از شاخصهای پوشش گیاهی هستند که برای پیشبینی پتانسیل آب برگ گیاهان سیبزمینی [ 15 ] تنها با استفاده از RGB استفاده میشوند. شاخص نسبت سبز ( شکل 9ب) نشان می دهد که آبیاری کامل قطره ای بالاترین ارزش را در مقایسه با سایر روش های آبیاری دارد و پس از آن بارانی کامل، قطره ای 65 درصد، قطره ای 50 درصدی و بارانی 50 درصدی قرار دارند. اگرچه تفاوت معنی داری بین 65% Drip، Full Sprinkler و 50% Drip وجود ندارد، اما تفاوت معنی داری بین سیستم Full Drip و Sprinkler 50% وجود دارد که نشان می دهد نسبت سبز پتانسیل نشان دادن ناهنجاری در این میدان از نظر ورودی آب این را می توان به این واقعیت نسبت داد که کلروفیل سبز را منعکس می کند و نوارهای آبی و قرمز را جذب می کند. نوار سبز همچنین ارتباط خطی با نیتروژن دارد. شاخص شدت ( شکل 9 ج) تفاوت در مقادیر شاخص را نشان می دهد. با این حال، رابطه ای با روش های مختلف آبیاری نشان نداد. در مقایسه با شاخص نسبت سبز، ENDVI (شکل 9 الف) روند مشابهی را نشان می دهد که قطره کامل دارای بالاترین مقدار شاخص و 50% اسپرینکلر دارای کمترین مقدار است. تجزیه و تحلیل آماری انجام شده بر روی مقادیر ENDVI نشان داد که بین قطره کامل و قطره 65 درصد و قطره 50 درصد تفاوت معنی داری وجود دارد. Full Drip در مقایسه با Full Drip دارای مقدار ENDVI بالاتری است اما تفاوت قابل توجهی ندارد. در مقایسه با معادله نسبت سبز، ENDVI بازتاب کلروفیل را با افزودن هر دو نوار NIR و سبز و کم کردن نوار آبی تقویت میکند. گیاهان سالم تر سبز و NIR بالاتری را منعکس می کنند. هنگامی که گیاه تحت تنش قرار می گیرد، بازتاب NIR به طور قابل توجهی کاهش می یابد. تحقیق انجام شده توسط فلاحی [ 16] نشان داد که علائم تنش آبی در زمین برای درختان کمبود آب مشاهده شد. آنها همچنین نشان دادند که سیستم قطرهای مصرف بسیار کمتری نسبت به سیستم اسپرینکلر دارد. این بدان معنی است که ENDVI نسبت به نسبت سبز نسبت به تغییرات ورودی آب حساس تر است. یک تصویر با رنگ کاذب با استفاده از ENDVI ( شکل 10) با مقادیر ENDVI از 0 تا 1 تولید شد. مقدار بالای ENDVI نشان دهنده ورودی بالاتر آب است. تصویر رنگ نادرست ENDVI به وضوح تغییرپذیری در ردیفهای آزمایشی را نشان میدهد، که میتواند به یک کشاورز اشاره کند که یک ناهنجاری در مزرعه وجود دارد، در این مورد ورودی آب. می توان مشاهده کرد که بخش هایی با ورودی آب بالا (قطره کامل و آبپاش کامل) دارای مقادیر ENDVI بالاتر و گروه های درختی با کمبود آب دارای مقادیر ENDVI کمتری هستند. از سوی دیگر، NDGNI از همان الگوی شاخص نسبت سبز پیروی می کند و تنها تفاوت معنی داری را بین Full Drip و 50% Sprinkler نشان می دهد. شاخص اشباع الگوی متفاوتی را نشان می دهد که در آن اسپرینکلر 50% دارای بالاترین مقدار شاخص و Full Drip کمترین مقدار شاخص را دارد. جالب است بدانید که شاخص اشباع عددی مشابه با ENDVI دارد. کار آینده شامل مطالعه این شاخص های پوشش گیاهی با توجه به ورودی مواد مانند نیتروژن خواهد بود.
3.3. تجزیه و تحلیل منطقه تاج درخت
مساحت تاج درخت برای هر درخت با شمارش تعداد پیکسل ها برای هر لکه مربوطه در ردیف های آزمایشی تعیین شد. شکل 11نشان می دهد که اسپرینکلر کامل بالاترین سطح متوسط را دارد و پس از آن قطره ای کامل، قطره ای 65 درصدی، قطره ای 50 درصدی و آبپاشی 50 درصدی قرار دارند. تفاوت معنی داری بین روش های کم آبیاری وجود ندارد. این رابطه خوبی بین سطح سایبان و ورودی آب نشان می دهد. تفاوت در اندازه تاج درخت را می توان حتی بدون پردازش بیشتر از تصاویر نیز مشاهده کرد. این تصاویر می تواند برای کشاورزان مفید باشد زیرا مشاهده آن روی زمین دشوار است. جستجوی زمین نیاز به زمان و کار بیشتری دارد. علاوه بر این، نتیجه شناسایی منطقه تاج پوشش در ترکیب با تجزیه و تحلیل شاخص پوشش گیاهی، مانند ENDVI، می تواند اطلاعاتی را در اختیار کشاورزان قرار دهد که ناهنجاری ها را در مزرعه آنها نشان دهد. مطالعه آینده با تجزیه و تحلیل سطح تاج پوشش شامل برآورد شاخص سطح برگ [ 10]، یک شاخص رایج مرتبط با فرآیند فیزیولوژیکی گیاهان است. C-MAP یک ابزار اضافی است که کشاورزان می توانند در مدیریت مزرعه خود از آن استفاده کنند.
بر اساس نتایج حاصل از تجزیه و تحلیل VI و تجزیه و تحلیل منطقه تاج درخت، C-MAP پتانسیل بسیار بالایی برای کمک به کشاورزان در مدیریت محصول دارد. مزایای این ابزار سنجش از دور نسبت به سایر گزینه ها هزینه کمتر، زمان کمتر مورد نیاز برای جستجوی میدانی و نیاز کمتر به منابع نیروی کار است. با کاهش هزینه پهپادها و کامپیوترهای کوچک، هزینه مالکیت این پلت فرم سنجش از راه دور برای اکثر کشاورزان در دسترس است. این به کشاورزان در جستجوی مزرعه کمک می کند که عموماً زمان بر و کار فشرده است. جایگزینی جستجوی میدانی با C-MAP برای کشاورزان اقتصادی خواهد بود. چندین شرکت پهپاد نیز برنامه های بسیار کاربرپسندی را توسعه داده اند که روی تلفن های هوشمند و تبلت ها کار می کنند. این برنامه ها به پل زدن موانع تکنولوژیکی برای استفاده از این نوع فناوری کمک خواهند کرد.
4. نتیجه گیری
یک سیستم مانیتورینگ (پلتفرم نظارت و ارزیابی محصول) بر اساس یک سیستم هوایی کوچک بدون سرنشین مجهز به یک دوربین چند طیفی توسعه یافت. سیستم پایش بر روی یک باغ سیب تجربی با پنج روش مختلف آبیاری آزمایش شد. پردازش تصویر و تجزیه و تحلیل بر اساس پنج شاخص پوشش گیاهی بود. ENDVI، GR، I، NDGNI، و SAT. نتایج نشان داد که تمامی شاخصهای پوشش گیاهی به جز I تفاوت معنیداری را بین سیستمهای قطرهای کامل و سیستم اسپرینکلر 50 درصد نشان میدهند. در بین تمام شاخصهای پوشش گیاهی، ENDVI نشاندهنده بهتری است زیرا تفاوت معنیداری را بین روشهای Full Drip و سایر روشهای کمبود آب نشان میدهد. یک تصویر شبه رنگی از ENDVI نشان داد که می تواند ناهنجاری ها را در میدان نشان دهد. این نتیجه پتانسیل C-MAP را به عنوان یک ابزار نظارتی برای ارزیابی تغییرات باغ، و به طور خاص تغییر در ورودی آب نشان میدهد. آزمایشهای بیشتری برای تعیین کمیت همبستگی بین شاخصهای پوشش گیاهی و سایر ورودیهای مواد انجام خواهد شد.
قدردانی ها
این تحقیق توسط دپارتمان کشاورزی ایالت آیداهو (کمک هزینه بلوک محصول ویژه آیداهو 2012 و 2014)، کنسرسیوم کمک هزینه فضایی آیداهو و دانشگاه نازاری شمال غربی پشتیبانی شد.
مشارکت های نویسنده
دوک ام. بولانون مطالعه را تصور کرد، ادبیات را مرور کرد، آزمایش را طراحی کرد، داده ها را پردازش کرد، نتایج را تفسیر کرد و مقاله نوشت. جان لونای و هدر اسکوگارد تصاویر را به دست آوردند، الگوریتم پردازش تصویر را توسعه دادند و داده ها را پردازش کردند. اسماعیل فلاحی باغ هدف و تصفیه آن را طراحی و بر جمع آوری داده ها نظارت داشت.
تضاد علاقه
نویسندگان هیچ تضاد منافع را اعلام نمی کنند.
اختصارات
در این نسخه از اختصارات زیر استفاده شده است:
| ب |
باند آبی
|
| CMOS |
مکمل اکسید فلز نیمه رسانا
|
| ENDVI |
افزایش شاخص تفاوت عادی شده گیاهی
|
| جی |
گروه سبز
|
| GR |
نسبت سبز
|
| من |
شدت
|
| NDGNI |
شاخص تفاوت عادی سبز نزدیک به مادون قرمز
|
| آر |
گروه قرمز
|
| SAT |
اشباع
|
| پهپاد |
وسیلهی نقلیهی هوایی بدون سرنشین
|
| VI |
شاخص پوشش گیاهی
|
منابع
- کلبی، اس. Ortman، JM پیش بینی اندازه و ترکیب جمعیت ایالات متحده: 2014 تا 2060. اداره سرشماری ایالات متحده. در دسترس آنلاین: https://www.census.gov/content/dam/Census/library/publications/2015/demo/p25-1143.pdf (در 4 آوریل 2016 قابل دسترسی است).
- لان، ی. تامسون، اس جی. هوانگ، ی. هافمن، WC; Zhang، H. وضعیت فعلی و جهتگیریهای آتی کاربرد هوایی دقیق برای مدیریت محصول خاص سایت در ایالات متحده. محاسبه کنید. الکترون. کشاورزی 2010 ، 74 ، 34-38. [ Google Scholar ] [ CrossRef ]
- لی، WS; آلچاناتیس، وی. یانگ، سی. هیرافوجی، م. مشو، د. لی، سی. فناوریهای سنجش برای تولید محصولات ویژه دقیق. محاسبه کنید. الکترون. کشاورزی 2010 ، 74 ، 2-33. [ Google Scholar ] [ CrossRef ]
- سوگیورا، آر. نوگوچی، ن. Ishii, K. فناوری سنجش از دور برای نظارت بر پوشش گیاهی با استفاده از یک هلیکوپتر بدون سرنشین. Biosyst. مهندس 2005 ، 90 ، 369-379. [ Google Scholar ] [ CrossRef ]
- کوندو، ن. Ting، KC Robotics for Bioproduction Systems ; ASAE: سنت جوزف، MI، ایالات متحده آمریکا، 1998. [ Google Scholar ]
- گارسیا-روئیز، اف. سنکران، س. Maja, JM; لی، WS; راسموسن، جی. احسانی، ر. مقایسه دو سکوی تصویربرداری هوایی برای شناسایی درختان مرکبات آلوده به Huanglongbing. محاسبه کنید. الکترون. کشاورزی 2013 ، 91 ، 106-115. [ Google Scholar ] [ CrossRef ]
- شیانگ، اچ. Tian, L. توسعه یک سیستم سنجش از راه دور کشاورزی ارزان قیمت مبتنی بر یک وسیله نقلیه هوایی بدون سرنشین مستقل (UAV). Biosyst. مهندس 2011 ، 108 ، 174-190. [ Google Scholar ] [ CrossRef ]
- جانسون، AKL؛ Kinsey-Henderson، سنجش از راه دور مبتنی بر ماهواره AE برای نظارت بر استفاده از زمین بعث در صنعت شکر. Proc. اوست Soc. فن قند نیشکر. 1997 ، 19 ، 237-245. [ Google Scholar ]
- MikroKopters. در دسترس آنلاین: https://www.mikrokopter.de/en/home (در 9 مه 2016 قابل دسترسی است).
- کورکولز، جی. اورتگا، جی اف. هرناندز، دی. مورنو، MA برآورد شاخص سطح برگ در پیاز (Allium cepa L.) با استفاده از هواپیمای بدون سرنشین. Biosyst. مهندس 2013 ، 115 ، 31-42. [ Google Scholar ] [ CrossRef ]
- کاپولوپو، آ. کویسترا، ال. برندونک، سی. بوچیا، ال. Suomalainen، J. برآورد صفات گیاهی مراتع از تصاویر فراطیفی اکتسابی با پهپاد: مقایسه رویکردهای آماری. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 2792-2820. [ Google Scholar ] [ CrossRef ]
- Pajares, G. بررسی اجمالی و وضعیت فعلی برنامه های سنجش از راه دور مبتنی بر وسایل نقلیه هوایی بدون سرنشین (UAV). فتوگرام مهندس Remote Sens. 2015 ، 81 ، 281-329. [ Google Scholar ] [ CrossRef ]
- Qi، X. زینگ، اف. فوران، دی جی; Yang, L. تقسیم بندی قوی سلول های همپوشانی در نمونه های هیستوپاتولوژی با استفاده از تشخیص دانه موازی و مجموعه سطح دافعه. IEEE Trans. Biomed. مهندس 2012 ، 59 ، 754-765. [ Google Scholar ] [ PubMed ]
- Bulanon، DM; بورکز، TF; کیم، دی بی؛ Ritenour، MA یک سیستم تصویربرداری چندطیفی برای تشخیص مرکبات. محیط زیست کنترل بیول. 2010 ، 48 ، 81-91. [ Google Scholar ] [ CrossRef ]
- ذکالوک، ر. سری رانجان، R. پیش بینی پتانسیل آب برگ گیاهان سیب زمینی با استفاده از بازتاب RGB. می توان. Biosyst. مهندس 2008 ، 50 ، 1-7. [ Google Scholar ]
- فلاحی، ا. فلاحی، ب. شفیعی، ب. نیلسن، دی. Neilsen, GH تأثیر برنامه ریزی طولانی مدت آب مبتنی بر تبخیر و تعرق در رژیم های مختلف آبیاری بر رشد درختان، عملکرد و کیفیت میوه در Harvest در فوجی اپل. مربا. پومول. Soc. 2011 ، 65 ، 42-53. [ Google Scholar ]
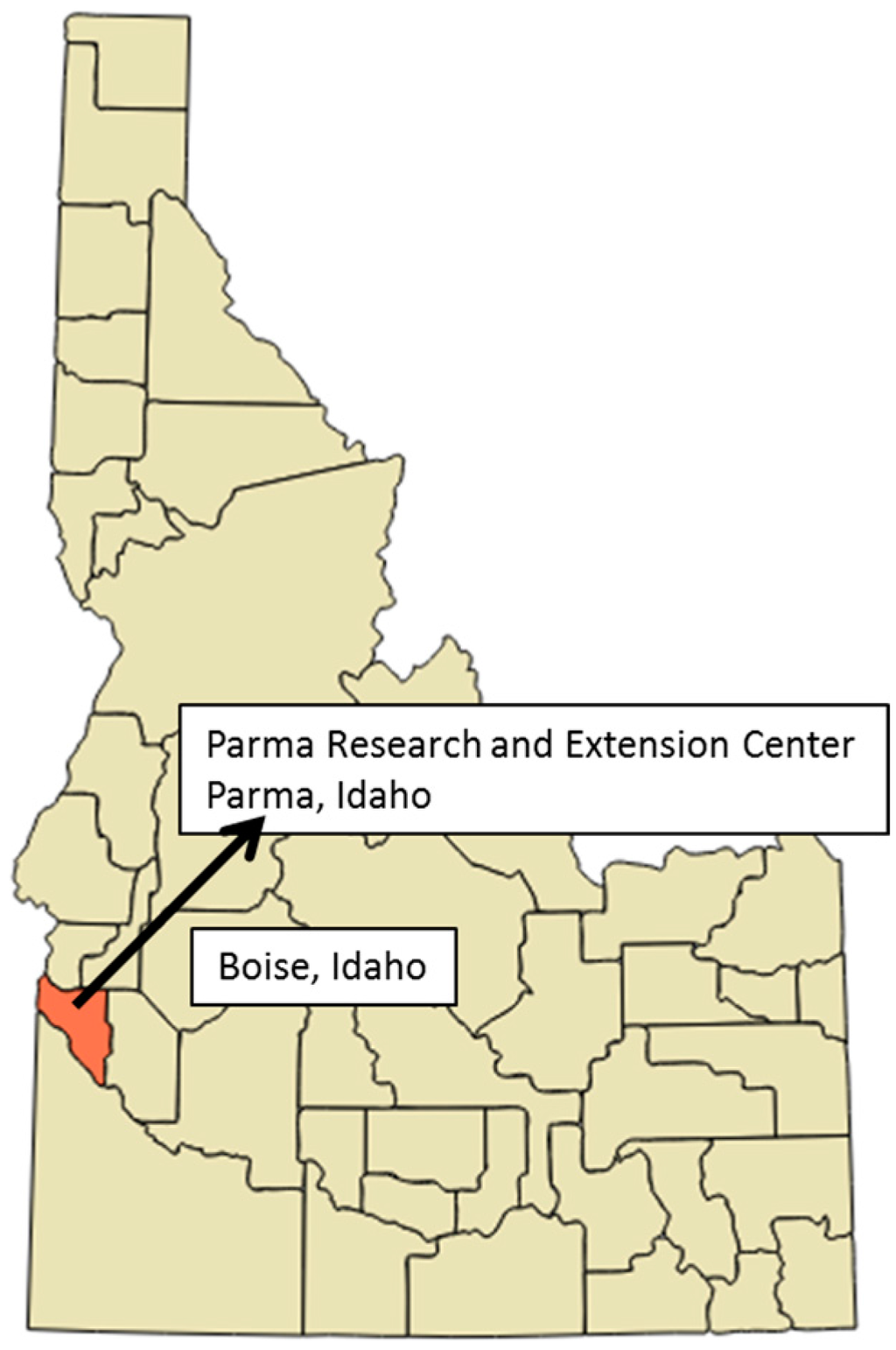
شکل 1. نقشه منطقه مطالعه باغ آزمایشی.
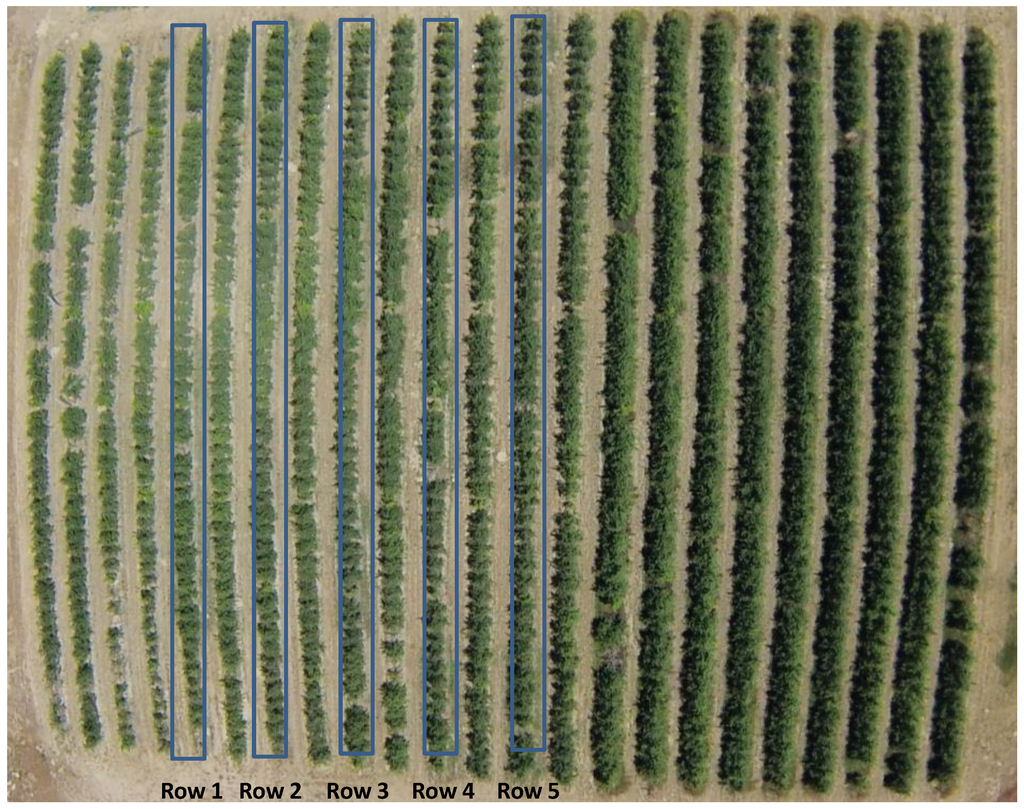
شکل 2. باغ هدف که پنج ردیف آزمایشی را نشان می دهد.

شکل 3. هواپیمای بدون سرنشین با دوربین چند طیفی (دوربین تنش گیاهی).

شکل 4. هواپیمای بدون سرنشین در حال گرفتن تصاویر از باغ آزمایشی.

شکل 5. ابزار MikroKopter روی صفحه نمایش برای برنامه ریزی نقطه راه.
شکل 6. نمونه تصویر چندطیفی از باغ هدف.

شکل 7. نمودار گردش تصویر و پردازش.
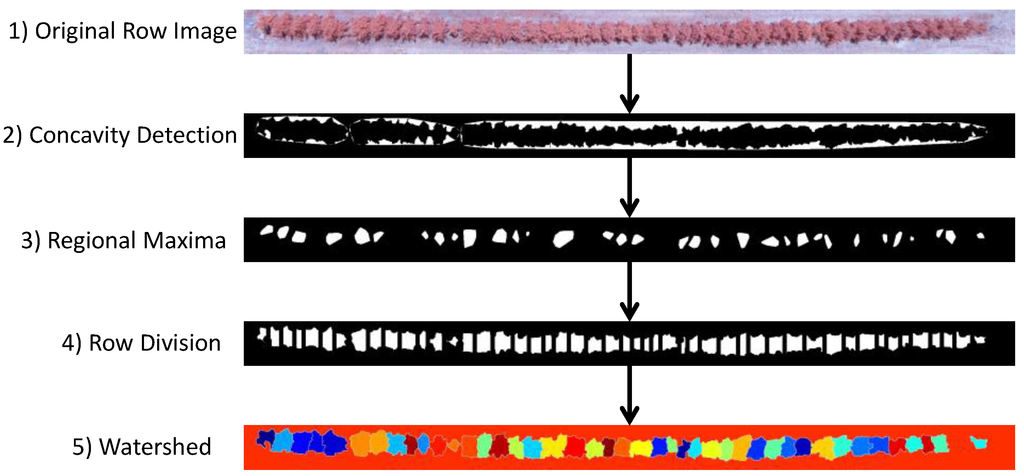
شکل 8. الگوریتم پردازش تصویر برای شناسایی درخت.
شکل 9. میانگین شاخص های پوشش گیاهی روش های مختلف آبیاری: ( الف ) ENDVI; ( ب ) GR; ( ج ) من؛ ( د ) NDGNI; ( ه ) SAT.
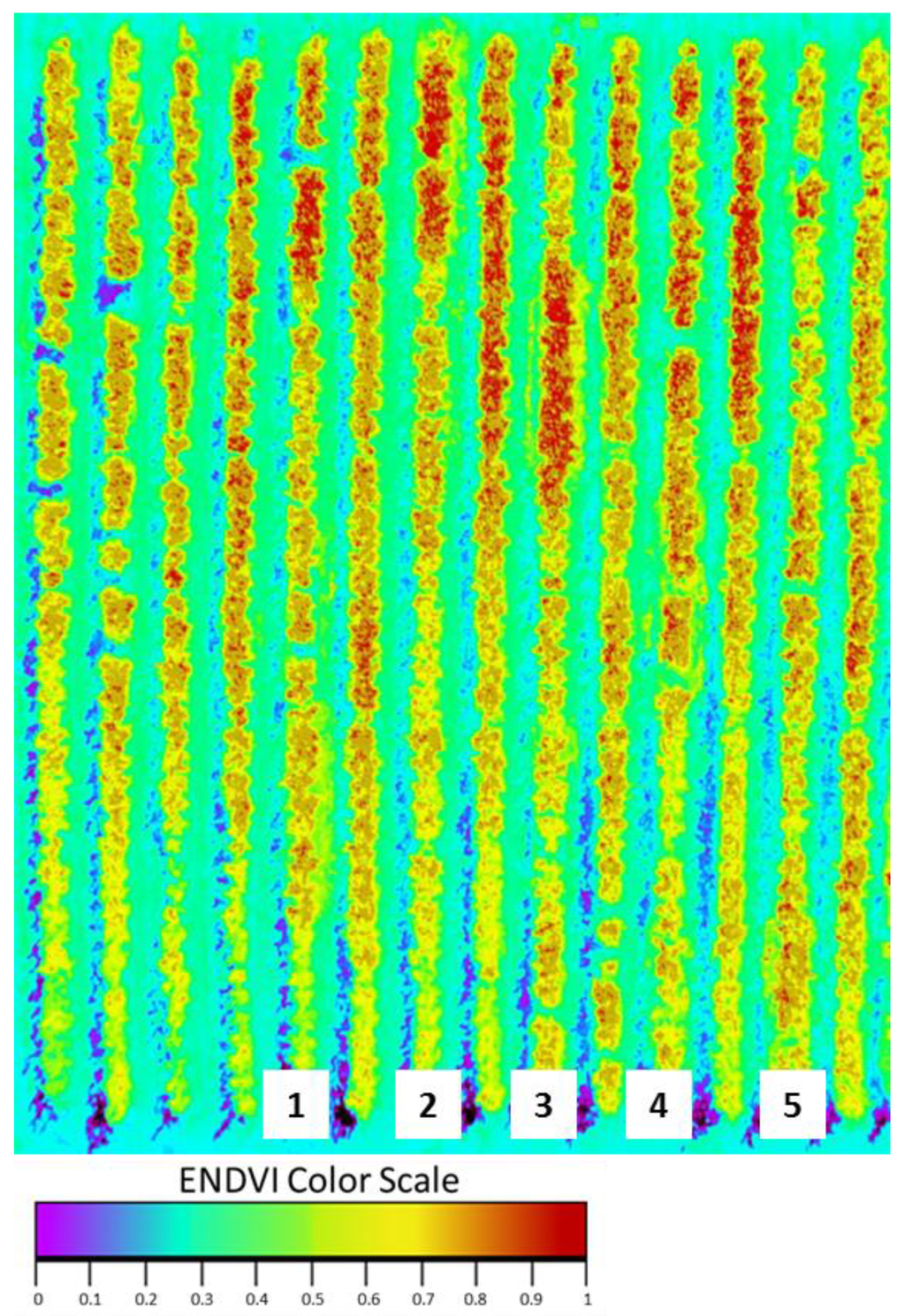
شکل 10. تصویر رنگی کاذب از ردیف های آزمایشی با استفاده از ENDVI.
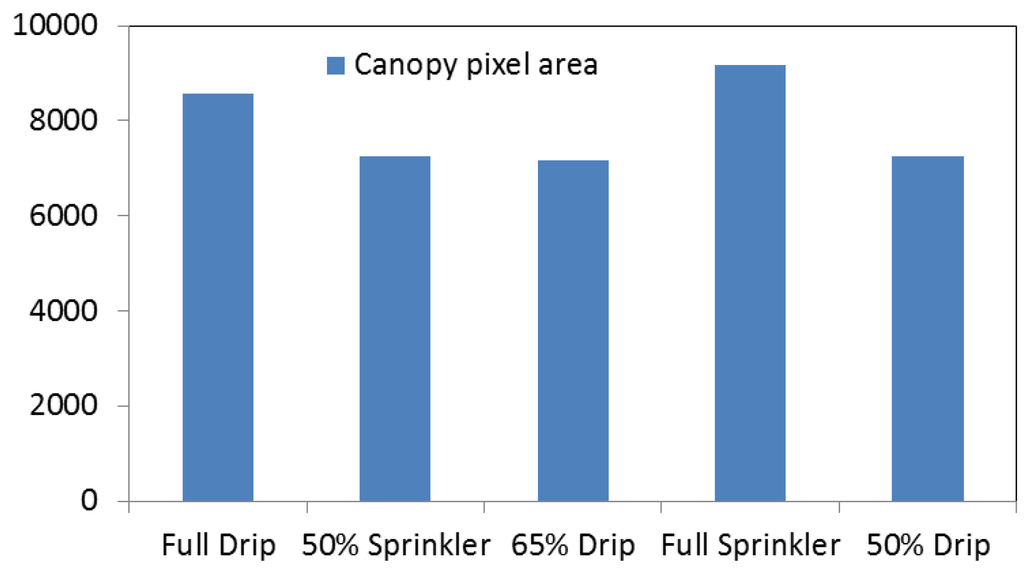
شکل 11. منطقه تاج درخت از روش های مختلف آبیاری.

جدول 1. توزیع روش های آبیاری برای ردیف های آزمایشی.
جدول 2. شاخص های پوشش گیاهی برای تجزیه و تحلیل تصویر.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر