1. معرفی
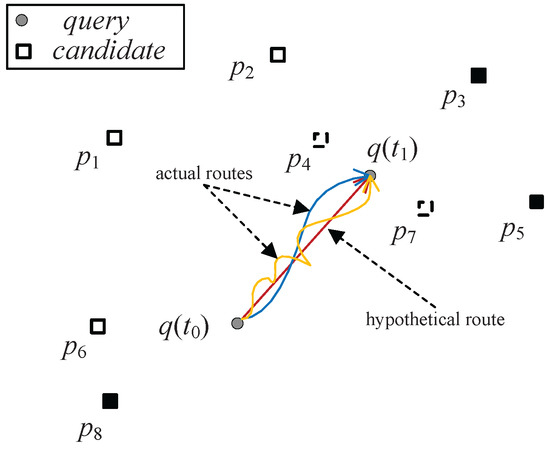
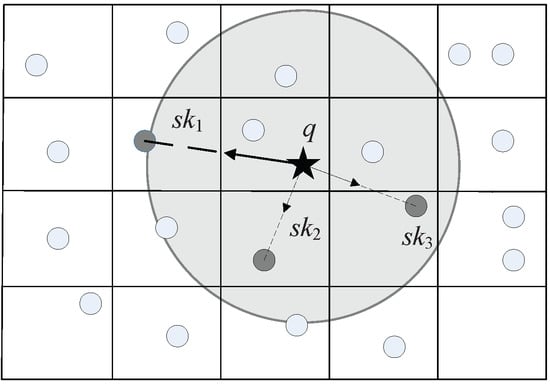
پرس و جو خط آسمان [ 1 ، 2 ] یک عملیات مفید برای بسیاری از برنامه های کاربردی مهم، از جمله تصمیم گیری بهینه چند معیاره است. با توجه به دو تاپل معین و چند بعدی u و v ، اگر u در همه ابعاد بدتر از v نباشد و کاملاً بهتر از v نباشد، u بر v مسلط است .حداقل در یک بعد با توجه به افزایش روزافزون استفاده از تلفن های هوشمند و در دسترس بودن موقعیت یاب های ارزان قیمت، خدمات مبتنی بر مکان (LBS) به طور فزاینده ای محبوب هستند، جایی که پرس و جوهای خط آسمان بر اساس مکان فعلی کاربر است، که به طور مداوم با حرکت کاربر تغییر می کند. با در نظر گرفتن نمونه ای از توریستی که به دنبال رستوران است، ممکن است به رستوران های نزدیک به محل خود که ارزان هستند و شهرت خوبی دارند علاقه مند باشد. از آنجایی که با سفر گردشگر فاصله بین گردشگر و رستوران در حال تغییر است، خط افق باید به طور مداوم به روز شود. علاوه بر این، گردشگر ممکن است مقصدی را در ذهن خود داشته باشد و به سمت آن مکان حرکت کند. همانطور که در شکل 1 نشان داده شده است ، کاربر در زمان تی0�0(یعنی در محل q(تی0)�(�0)) در یک جهت عمودی حرکت می کند (اگرچه کاربران ممکن است در جهت های دلخواه حرکت کنند، در واقع یک کاربر در هر زمان فقط در یک جهت حرکت می کند). در دفعه بعد تی1�1، کاربر به محل می رسد q(تی1)�(�1). مسیر ایده آل ممکن است مسیر قرمز باشد. با این حال، به دلایل مختلف، مانند انتخاب یک دوست، تعمیر و نگهداری کالسکه، و ازدحام ترافیک و غیره، مسیر واقعی ممکن است مسیر زرد یا آبی باشد.
در دیگر برنامههای بلادرنگ مانند بازیهای الکترونیکی و سیستمهای نبرد دیجیتال، مسیر بین بازیکن و مقصدش ممکن است مستقیم نباشد. در عوض، مسیر پرپیچ و خم است، مانند مسیرهایی که در مثال رستوران قبلی یافت شد. هنگامی که بازیکن مبارز حرکت می کند، باید مراقب نگهبانانی باشد که از نظر انرژی، سلاح و غیره برای او نزدیک و خطرناک ترین هستند. رویکرد به روز رسانی نتایج پرس و جوی خط آسمان، محاسبه مجدد نتایج خط آسمان با استفاده از الگوریتم های کارآمد از ابتدا است، مانند خط افق شاخه و کران (BBS) [ 3 ، 4]]. با این حال، راهحل نسبتا مؤثر این است که آخرین نتایج محاسبهشده خط آسمان را در حافظه پنهان نگه دارید و فقط آن دسته از اشیاء دادهای را محاسبه کنید که ممکن است به نتایج خط آسمان وارد یا خارج شوند.
توجه داشته باشید که رویکردهای موجود همیشه فرض می کنند که حرکت نقطه پرس و جو پیوسته و دقیقاً قابل محاسبه است. هوانگ و همکاران [ 5 ] فرض کرد که نقطه پرس و جو به طور متوالی در حال حرکت است و سرعت نقطه پرس و جو به عنوان شناخته شده است. (vایکس،vy)(��,��). لین و همکاران [ 6 ] و گوو و همکاران. [ 7 ] حرکت نقطه پرس و جو a را یک خط در نظر گرفت و Lin و همکاران. [ 6 ] همچنین فرض کرد که نقطه پرس و جو در محدوده خاصی حرکت می کند. برای در نظر گرفتن حریم خصوصی مکان، نقطه پرس و جو کاربر گاهی اوقات در یک منطقه دیسک متفاوت فرض می شود [ 8 ]. در این مقاله، ما به حرکتی که معمولاً به صورت تدریجی در یک سری مراحل زمانی گسسته ارائه میشود، میپردازیم که برای کاربردهای واقعی عملیتر است.
از آنجایی که الگوهای حرکت گسسته برای نقاط متحرک مناسب تر هستند، ما از مدل حرکت افزایشی برای پرس و جوهای خط افق پیوسته استفاده می کنیم. یعنی نقاط پرس و جو به صورت تدریجی در مراحل زمانی گسسته حرکت می کنند. بر خلاف مدل های حرکتی موجود در [ 5 ، 6 ، 7 ، 8]، با توجه به مرز خطای رانش و سرعت رانش، مدل حرکت افزایشی هیچ محدودیتی برای حرکت یا پیشبینیپذیری آن قائل نیست (اگرچه جهت در این مقاله داده شده است، اما هیچ محدودیتی در جهت حرکت نداریم). تحت مدل حرکت افزایشی، ما از ویژگیهای هندسی برای هرس منطقهای استفاده میکنیم که در آن اشیاء داده در نتایج نهایی پرس و جوی خط آسمان قرار نخواهند داشت. برای جلوگیری از محاسبه نتایج خط آسمان از ابتدا در حالی که نقاط پرس و جو در حال حرکت هستند، ساختار داده ای مشابه ساختارهای داده جنبشی (KDSs) حفظ می کنیم [ 9 ، 10]] که در حوزه هندسه محاسباتی شهرت دارند. KDS با ذخیره تمام آن داده ها در برخی ساختارهای خاص رابطه، رابطه مورد نظر را بین داده ها حفظ می کند. محتویات در KDS تغییر نمی کند مگر اینکه رابطه بین برخی از نقاط داده تغییر کرده باشد. ساختار داده شامل فهرستی برای نتایج پرس و جوی خط آسمان در هر مرحله زمانی است. هنگامی که نقطه پرس و جو حرکت می کند، ساختار داده تصمیم می گیرد که آیا شی(های) داده وارد(های) نتایج خط آسمان می شود یا از مجموعه نتایج خارج می شود. پیاده سازی ساختار داده بر اساس مکانیسم های رویداد محور است. چارچوب پردازش پرس و جوهای خط آسمان پیوسته تحت یک مدل حرکت افزایشی همانطور که در شکل 2 نشان داده شده است نشان داده شده است.. ابتدا مجموعه داده ورودی با استفاده از ویژگی های هندسی بر اساس مدل حرکت افزایشی هرس می شود. سپس، نتایج اولیه خط آسمان را بر روی مجموعه داده هرس شده محاسبه می کنیم. مکانیسمهای رویداد محور برای محاسبه نتایج پیوسته خط آسمان زمانی که نقطه پرس و جو در حال حرکت است، استفاده میشوند. به طور خلاصه، مشارکت های کلیدی به شرح زیر است:
-
ما یک مدل حرکت افزایشی را برای پرس و جوهای خط افق پیوسته اتخاذ می کنیم که نه حرکت را محدود می کند و نه پیش بینی می کند.
-
با استفاده از ویژگیهای هندسی بهعنوان یک نقطه پرس و جو که تحت مدل حرکت افزایشی حرکت میکند، نقاط داده غیر مرتبط با نتیجه خط افق را هرس میکنیم، که میتواند پردازش پرسوجوهای خط افق پیوسته را تسریع کند.
-
به جای تسلط دقیق، ما تسلط احتمالی را تحت یک مدل حرکت افزایشی برای دو نقطه داده که احتمالاً بر یکدیگر تسلط دارند، پیشنهاد میکنیم. با دادن آستانه های مختلف تسلط احتمالی، نتایج پرس و جو نهایی را تعیین می کنیم که در برنامه های واقعی واقعی تر هستند.
-
ما کارایی استراتژیهای هرس هندسی را تحت یک مدل حرکت افزایشی با آزمایشهای گسترده روی مجموعه دادههای مقیاس بزرگ نشان میدهیم.
بقیه مقاله به شرح زیر سازماندهی شده است. بخش 2 کارهای مرتبط را معرفی می کند. مقدمات در بخش 3 آورده شده است . بخش 4 استراتژی های هرس هندسی را ارائه می دهد. ساختارهای داده و مکانیسمهای پردازش رویداد محور در بخش 5 ارائه شدهاند . الحاقات به الگوهای حرکتی خاص در بخش 6 پیشنهاد شده است . نتایج مطالعات عملکرد جامع در بخش 7 مورد بحث قرار گرفته است . بخش 8 مقاله را به پایان می رساند.
2. کارهای مرتبط
پرس و جوهای خط افق عملگر skyline توسط Borzsonyi و همکاران به جامعه پایگاه داده معرفی شد. [ 1 ] در سال 2001. مطالعات متعاقب آن بر پردازش کارآمد پرس و جو خط افق متمرکز شده است. تان و همکاران [ 11 ] تکنیک های بیت مپ و فهرست را توسعه داد. چامیکی و همکاران [ 12 ] الگوریتم مرتبسازی-فیلتر-خط افق (SFS) را توسعه داد که حلقه تودرتو بلوک (BNL) را با از پیش مرتبسازی مجموعه داده بهبود بخشید. چندین بهینه سازی برای الگوریتم SFS (به عنوان مثال، [ 13 ]) کارایی آن را افزایش می دهد. کوسمن و همکاران [ 14 ] یک الگوریتم نزدیکترین همسایه (NN) ارائه کرد که به کاربران اجازه می داد تنظیمات ترجیحی را در طول زمان اجرا تغییر دهند. پاپادیاس و همکاران [ 4] یک الگوریتم پیشرو به نام خط افق شاخه و محدود (BBS) را پیشنهاد کرد که بر اساس تکنیک جستجوی نزدیکترین همسایه پشتیبانی شده توسط درختان R است. تغییرات اپراتور خط آسمان نیز مورد بررسی قرار گرفته است، مانند در یک محیط توزیع شده، شبکه های جاده، مکعب های خط افق، خطوط آسمان معکوس، و خطوط آسمان تقریبی، فقط به نام چند. برای برنامه های افزودنی بیشتر به [ 2 ] و [ 15 ] مراجعه کنید. با این حال، مطالعات فوق فقط نقاط پرس و جو ایستا را در ویژگی های استاتیک در نظر می گیرند. شریف زاده و همکاران [ 16 ] ابتدا پرس و جوهای خط افق فضایی را معرفی کرد که توسط دنگ و همکارانش نیز پرس و جوهای خط افق چند منبعی در شبکه های جاده ای نامیده می شوند. [ 17]. آنها ویژگی های اشیاء داده را به دو دسته متمایز می کنند: ویژگی های فضایی و ویژگی های غیر فضایی که به آنها ابعاد پویا و ایستا یا ویژگی های ایستا و ویژگی های پویا نیز می گویند. آنها همچنین فقط نقاط پرس و جو ایستا را در ویژگی های پویا در نظر گرفتند.
مدل سازی حرکت و پردازش خط آسمان. حوزه مرتبط دیگر نظارت بر حرکات پیوسته با استفاده از ساختارهای داده جنبشی (KDS) در هندسه محاسباتی است. باش و همکاران [ 9 ] ابتدا یک چارچوب مفهومی برای KDS پیشنهاد کرد تا به طور مداوم ویژگی های در حال تکامل داده های تلفن همراه را حفظ کند. یک فرض اساسی در چارچوب KDS این است که مسیرهای شیء مشخص هستند. اخیراً، تلاشهای متعددی برای مقابله با دادهها در مدلهای حرکتی بسیار محدودتر انجام شده است. مونت و همکاران [ 18 ] نگهداری ساختارهای هندسی را در محیطی که مسیرها ناشناخته است مورد مطالعه قرار دادند. آنها نگرانی های مربوط به ردیابی نقاط و به روز رسانی ساختار هندسی را به دو ماژول تقسیم کردند: پردازنده حرکت ( MP ) والگوریتم حرکت افزایشی ( IM ). آنها همچنین یک مدل آنلاین ساده ارائه کردند که در آن دو عامل به نامهای مشاهدهگر و سازنده برای حفظ حرکت افزایشی همکاری میکردند [ 19 ].
حرکت در نظر گرفته شده در پرس و جوهای خط آسمان شامل یک نقطه پرس و جو متحرک و اشیاء داده متحرک است. هوانگ و همکاران [ 5 ] یک ساختار داده مبتنی بر جنبشی برای به روز رسانی نتایج خط آسمان پیشنهاد کرد. نقطه پرس و جو همراه با الگوهای حرکتی از پیش تعریف شده حرکت می کرد (یعنی حرکت یکنواخت در یک خط مستقیم). لی و همکاران [ 20 ] نیز مشکل مشابهی را مورد مطالعه قرار داد. با این حال، هر دو تلاش بر این فرض تکیه می کنند که سرعت نقاط متحرک مشخص است. متأسفانه، این فرض در بسیاری از کاربردهای دنیای واقعی که نقاط (مثلاً اتومبیلها، گردشگران) اغلب الگوهای حرکتی خود را تغییر میدهند (مثلاً سرعت و جهت) صادق نیست. علاوه بر این، گسترش تکنیکهای آنها برای سناریوهایی که سرعتها ناشناخته هستند، بیاهمیت است. لین و همکاران [ 6] فرض کرد که نقطه پرس و جو در یک محدوده مکانی از پیش تعریف شده به جای مکان دقیق یا حرکت همراه با یک قطعه خط است. برای مدیریت حرکت اشیاء پرس و جو، نسخه افزایشی راه حل خط افق مبتنی بر خط ابداع شده است تا هم اندازه مجموعه نتایج و هم هزینه محاسبات را کاهش دهد. Hsueh et. al [ 21 ] الگوریتمی را برای به روز رسانی خط افق زمانی که اشیاء داده مقادیر ویژگی خود را تغییر می دهند، ارائه کرد. چیما و همکاران [ 22] یک رویکرد مبتنی بر منطقه امن برای نظارت بر پرس و جوهای خط افق متحرک پیشنهاد کرد که به درخواست ها اجازه می دهد به شکل دلخواه حرکت کنند. نتایج پرس و جو باید فقط زمانی به روز شوند که پرس و جو از منطقه امن خود خارج شود. در چارچوب، زمانی که یک نقطه پرس و جو در فاصله زمانی بین دو رویداد مجاور حرکت می کند، مسیر آن متعلق به یک منطقه امن است. وو و همکاران [ 23] عدم قطعیت را هم در نقطه پرس و جو و هم در نقاط مورد علاقه (POIs) برای پرس و جوهای خط افق فضایی معرفی کرد. عدم قطعیت ها در اینجا به صورت دیسک های مربعی با شعاع های متنوع نشان داده می شوند. در مقایسه با این روش، مدل حرکت افزایشی ما نه تنها عدم قطعیت ها (که توسط دیسکی که شعاع آن حداکثر سرعت است نشان داده می شود)، بلکه جهت ها را نیز در نظر می گیرد. تفاوت دیگر با این مطالعات این است که ما نقاط دادهای که به نتایج نهایی خط آسمان تعلق ندارند را بر اساس ویژگیهای هندسی به عنوان یک مرحله پیش پردازش هرس میکنیم، که به نقاط داده کمتری دسترسی پیدا میکند و در نتیجه در زمان CPU بیشتر صرفهجویی میشود. نویسندگان در [ 3 ، 4 ، 24 ، 25 ، 26 ] خطوط افق پویا را مطالعه کردند. با این حال، [ 3 ، 4 ،24 ] از روش شاخه و کران (BBS) برای محاسبه نتایج خط آسمان از ابتدا استفاده کرد. مراجع [ 25 ، 26 ] از مکانیزم ذخیره سازی برای سرعت بخشیدن به پردازش پرس و جو خط افق پویا/محدودیت استفاده کردند. با این حال، برای پرس و جوهای خط افق پیوسته، آنها بر اساس پرس و جوهای گذشته هستند که به طور کامل از نتایج جستجوی لحظه آخری استفاده نمی کنند. علاوه بر این، روش های ساچاریدیس و همکاران. [ 25 ] به دلیل کاستی های مکانیسم های کدگذاری بیت مپ عملی نیستند.
3. مقدمات
هنگامی که نقاط پرس و جو حرکت می کنند، برای پردازش بیشتر پرس و جوهای خط آسمان، فاصله بین نقطه پرس و جو و نقاط داده باید تخمین زده شود. در این بخش، ابتدا مکان نقطه پرس و جو را در مدل حرکت افزایشی تخمین می زنیم و سپس تسلط فاصله بین نقاط داده را برای محاسبه بیشتر نتایج خط آسمان ارزیابی می کنیم. جدول 1 نمادهایی را که اغلب در سراسر مقاله استفاده می شود، خلاصه می کند.
3.1. تعریف مشکل
با توجه به n نقطه داده در مجموعه داده D�، هر نقطه دارای ویژگی های غیر فضایی d بعدی است که به آن ویژگی های استاتیک نیز می گویند. هر نقطه پمن��به عنوان ذخیره می شود ( p (پمن) ،پمن ، 1،پمن ، 2، . . . ،پمن ، د)(�(��),��,1,��,2,…,��,�)، و p (پمن)�(��)، پمن ، ج��,�محل قرار دارند پمن��و j صفت استاتیک بعدی از پمن��، به ترتیب. بدین ترتیب، پمن��را می توان به عنوان نشان داد پمن= (پمن ، 1،پمن ، 2، . . . ،پمن ، د،پمن ، د+ 1)��=(��,1,��,2,…,��,�,��,�+1)، جایی که پمن ، د+ 1��,�+1فاصله نقطه پرس و جو q و نقطه داده استپمن��.
تعریف 1.
(Static Dominance) برای دو نقطه داده پمن،پj��,��و تمام صفات پمن��به جز ویژگی فاصله، ∀ k , k = ( 1 , 2 , . . . , d)∀�,�=(1,2,…,�)، پمن ، ک≤پj ، k��,�≤��,�و حداقل یک < برقرار است، ما آن را می گوییم پمن��به صورت ایستا تسلط دارد پj��، به عنوان نشان داده شده است پمن≺s t aپj��≺�����.
تعریف 2.
(تسلط کامل) برای دو نقطه داده پمن،پj��,��، ∀ k , k = ( 1 , 2 , . . . , d+ 1 )∀�,�=(1,2,…,�+1)، پمن ، ک≤پj ، k��,�≤��,�و حداقل یک < برقرار است، ما آن را می گوییم پمن��کاملا مسلط است پj��، نشان داده شده است پمن≺پj��≺��.
اگرچه پردازش خط آسمان شامل ویژگیهای فضایی و استاتیک در مشکل ما میشود، برخی از نقاط داده میتوانند همیشه در خط افق باشند بدون توجه به اینکه نقطه پرس و جو چگونه حرکت میکند. این به این دلیل است که این نقاط داده دارای ویژگی های غیر مکانی غالب هستند که تضمین می کند هیچ نقطه داده دیگری نمی تواند بر آنها تسلط داشته باشد. ما این زیرمجموعه از نقاط افق را به عنوان نشان می دهیم اسs t a����، پرس و جو نهایی افق به عنوان نتیجه می شود اس�، و تفاوت این دو مجموعه اس–اسs t a�−����، مانند اسc h g��ℎ�برای نقاط داده در اسc h g��ℎ�ممکن است هنگام حرکت نقطه پرس و جو، نقاط افق نباشند. بدیهی است که اسc h g��ℎ�شامل دو بخش است: بخش اول اسمن n���، که شامل نقاط داده از مجموعه داده غیر آسمانی است D– اس�−�. هنگامی که نقطه پرس و جو حرکت می کند، این نقاط به نقاط افق تبدیل می شوند. قسمت دوم است اسr e m a i n�������، که حاوی نقاط خط افق است که از آن خارج نمی شوند اس�هنگامی که نقطه پرس و جو حرکت می کند.
به جای پرس و جوهای خط افق فوری مانند روش I/O بهینه BBS، کوئری های خط افق پیوسته را به صورت زیر تعریف می کنیم.
تعریف 3.
(پرس و جوهای مستمر خط افق) با توجه به نتایج خط افق اس0�0در زمان تی0�0، نتیجه خط افق اس1�1در دفعه بعد تی1�1بر اساس اس0�0و فقط دو مجموعه متنوع را در نظر می گیرد: اس0–اس1�0−�1، نقاط داده از نتایج زمان خارج می شوند تی0�0، و اس1–اس0�1−�0، داده ها از D–اس0�−�0تبدیل به نقاط افق
از منابع [ 1 ، 5 ، 20 ، 21 ]، می دانیم که نتیجه خط آسمان اس0�0در مقایسه با D�. با این حال، مجموعه داده D–اس0�−�0نیز بسیار بزرگ است خوشبختانه، همه نقاط داده در این مجموعه داده امکان تبدیل شدن به نقاط آسمان را ندارند. در عمل، با توجه به حرکت نقطه پرس و جو q ، تنها بخش بسیار کوچکی از D–اس0�−�0می تواند نقاط افق باشد. بنابراین، سربار محاسبات پرس و جوهای خط آسمان پیوسته تا حدی در مقایسه با پرس و جوهای اسنپ شات خط آسمان کاهش می یابد.
3.2. مدل حرکت افزایشی
مدل حرکت افزایشی اولین بار توسط Mount و همکاران ارائه شد. [ 18 ]. بعدها، چو و همکاران. [ 19 ] از این مدل برای حفظ ساختارهای درختی شبکه و شبکه تحت یک مدل حرکت افزایشی استفاده کرد. ما به معرفی مختصری از این مدل با اصلاحات تطبیقی برای مشکل خود می پردازیم.
3.2.1. موقعیت نقطه پرس و جو
بگذارید q یک نقطه پرس و جو باشد. موقعیت q در فضای اقلیدسی در زمان t به صورت نشان داده می شود q( تی )�(�). حرکت نقطه qم�، دنباله ای محدود از موقعیت های نقطه ای است که در نمونه های زمانی گسسته نمونه برداری شده اند: م= < q(تی0) ، ق(تی1) ، . . . ، ق(تین) >�=<�(�0),�(�1),…,�(��)>، جایی که تیمن – 1<تیمن��−1<��. فاصله بین دو نمونه متوالی یک مرحله زمانی است: s = [تیمن – 1،تیمن]�=[��−1,��]. اجازه دهید v بیانگر تخمین سرعت فعلی یک نقطه پرس و جو باشد. جابجایی تخمینی نقطه روی این پله است s v��، و جابجایی واقعی آن توسط بردار داده می شود u = q(تیمن) – q(تیمن – 1)�=�(��)−�(��−1). اجازه دهید | u ||�|طول بردار اقلیدسی را نشان می دهد تو�. ما از drift این نقطه در زمان استفاده می کنیم تیمن��برای نشان دادن خطای نسبی بین جابجایی های واقعی و تخمینی:
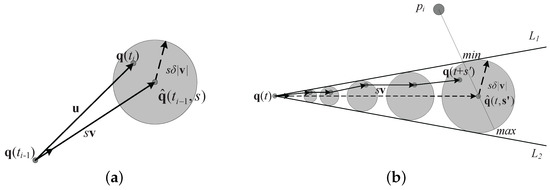
اجازه دهید δ کران رانش باشد. می گوییم که حرکت م�این تخمین حرکت را برآورده می کند اگر برای تمام مراحل زمانی رانش از م�نسبت به برآورد سرعت v حداکثر δ است . با توجه به تخمین سرعت v و با توجه به هر زمان t ، مکان تخمین زده شده نقطه پس از زمان سپری شده s به صورت q^( t , s ) = q( t ) + s v�^(�,�)=�(�)+��. به عنوان مثال، محل تخمینی از q(تیمن – 1)�(��−1)بعد از مرحله s است q^(تیمن – 1، اس )�^(��−1,�)( شکل 3 الف را ببینید). اجازه دهید ب ( ق، ر )�(�,�)گوی اقلیدسی را با شعاع r که در نقطه q مرکز است نشان دهید . از تعاریف بالا داریم
فرض کنید T یک بازه زمانی از زمان شروع شده در زمان t باشد ، تی= [ t , t + s ]�=[�,�+�]. اگر یک حرکت م�یک تخمین حرکت داده شده را برآورده می کند، سپس برای هر نمونه زمانی t +س“∈ تی�+�′∈�، 0 ≤س“≤ s0≤�′≤�، نقطه پرس و جو q( t +س“)�(�+�′)درون یک توپ اقلیدسی قرار دارد که در مرکز آن قرار دارد q^( ت ،س“)�^(�,�′)و مرز م�توسط یک سری از توپ های ذکر شده در بالا تعیین می شود ( شکل 3 ب را ببینید). معادله زیر محدودیت های موقعیت خود را در هر زمان مشخص می کند:
3.2.2. تابع فاصله پارامتری زمان
در مسئله ما، سرعت یک نقطه پرس و جو توسط موقعیت های نقطه در مراحل مختلف زمانی تعیین می شود:
برای سادگی، فرض می کنیم که نقطه پرس و جو q در فضای 2 d حرکت می کند،v = (vایکس،vy)�=(��,��)، و موقعیت q در زمان تیمن��است q(تیمن) = (ایکسمن،yمن)�(��)=(��,��). ما استفاده می کنیم qس��برای نشان دادن مرکز توپ اقلیدسی. در زمان تیمن��، qس= (ایکسمن،yمن)��=(��,��). پس از مدتی سپری شده از s = [تیمن،تیمن + 1]�=[��,��+1]، مرکز مدل حرکت افزایشی qس��تغییرات (ایکسمن + 1،yمن + 1)(��+1,��+1)و برابر است با (ایکسمن+ svایکس،yمن+ svy)(��+���,��+���). سپس، برای یک نقطه داده p واقع در (ایکسپ،yپ)(��,��)، در زمان تیمن + 1��+1، فاصله تخمینی بین qس��و p را می توان به صورت زیر بیان کرد:
با معادله ( 3 )، محل تخمینی نقطه پرس و جو است q(تیمن + 1) ∈ B (q^(تیمن, s ) , s δ| v | )�(��+1)∈�(�^(��,�),��|�|). از آنجایی که مکان تخمین زده شده یک نقطه پرس و جو پس از زمان سپری شده s در یک توپ اقلیدسی است، فاصله واقعی بین q(تیمن + 1)�(��+1)و p در محدوده معینی محدود شده است ( شکل 3 ب را ببینید). ما استفاده می کنیم من( p , q(تیمن + 1) )�(�,�(��+1))برای نشان دادن فاصله بین p و q(تیمن + 1)�(��+1):
بعلاوه، دi s t ( p , q(تیمن + 1) )����(�,�(��+1))برای نشان دادن فاصله واقعی بین p و استفاده می شودq(تیمن + 1)�(��+1)، که در محدوده من( p , q(تیمن + 1) )�(�,�(��+1))با معادله ( 6 ) نشان داده می شود.
3.3. رابطه تسلط فاصله
همانطور که نقطه پرس و جو دائما حرکت می کند، فاصله بین نقطه متحرک و هر نقطه داده تغییر می کند، که نادرست است زیرا نمی توانیم موقعیت واقعی نقطه پرس و جو را دقیقاً پیش بینی کنیم. با این حال، ما مطمئن هستیم که فاصله در یک محدوده مشخص است: من(پمن،qس)�(��,��). علاوه بر این، اگر دمن نیستم ( _پمن،qس) < دمن نیستم ( _پj،qس)����(��,��)<����(��,��)، پمن��به نقطه پرس و جو نزدیک تر از پj��. رابطه سلطه بین دمن نیستم ( _پمن،qس)����(��,��)و دمن نیستم ( _پj،qس)����(��,��)تایید نشده است، زیرا هر دوی آنها نادرست هستند اما در یک محدوده شناخته شده هستند. بنابراین، ما به یک روش منطقی برای محاسبه احتمال آن نیاز داریم پمن��از … بهتر است پj��در فاصله
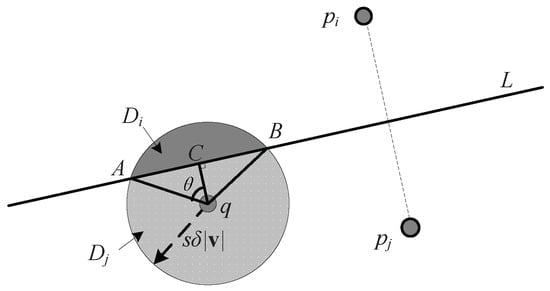
فرض کنید پس از گذشت زمان s ، موقعیت یک نقطه پرس و جو در شکل 4 نشان داده شده است ، شعاع مدل حرکت افزایشی برابر است با s δ| v |��|�|، و L نشان دهنده عمود بر عمود بر پمنپj����که توپ را به دو ناحیه تقسیم می کند: Dمن��و Dj��. سپس از A و B برای نشان دادن دو تقاطع L و توپ استفاده می کنیم. زمانی که نقطه پرس و جو q در منطقه باشد Dمن��، دمن نیستم ( _پمن،qس) < دمن نیستم ( _پj،qس)����(��,��)<����(��,��).
لم 1.
فرض کنید که موقعیت نقطه پرس و جو q به طور یکنواخت در توپ اقلیدسی توزیع شده است. زاویه بین موقعیت تخمینی نقطه پرس و جو به تقاطعات عمود بر عمود بر پمنپj����و کران مدل حرکت افزایشی است 2 θ2�، سپس این احتمال وجود دارد که پمنپمناز … بهتر است پjپ�در فاصله، نشان داده شده با پr (پمن<دمن تی _پj)پ�(پمن<دمنستیپ�)، قابل محاسبه است
اثبات
تا زمانی که نقطه پرس و جو در منطقه باشد Dمن�من، پمنپمنبه نقطه پرس و جو نزدیکتر از پjپ�; در نتیجه، این احتمال وجود دارد که پمنپمناز … بهتر است پj��در فاصله برابر با احتمال قرار گرفتن نقطه پرس و جو در منطقه است Dمن�من. با فرض اینکه موقعیت های ممکن نقطه پرس و جو به طور یکنواخت در توپ توزیع شده است، فقط باید نسبت ناحیه را محاسبه کنیم. Dمن�منبه کل توپ
زاویه بین موقعیت تخمینی نقطه پرس و جو به تقاطعات عمود بر عمود بر پمنپj����است 2 θ2�، بنابراین مساحت AqB فن شکل:
جایی که R نشان دهنده شعاع توپ است.
علاوه بر این، مساحت مثلث ABq برابر است با:
بنابراین، منطقه از Dمن�منرا می توان به صورت زیر بیان کرد:
سپس، می توانیم به این نتیجه برسیم:
☐
از تجزیه و تحلیل بالا می بینیم که با حرکت یک نقطه پرس و جو، فاصله بین نقطه متحرک و هر نقطه داده مشخص نیست و به موقعیت تخمینی نقطه پرس و جو مربوط می شود. در ادامه به تعریف تسلط در فاصله می پردازیم. لم 1 نحوه محاسبه احتمال آن را نشان داده است پمنپمناز … بهتر است پjپ�در فاصله
تعریف 4.
(غلبه در فاصله) اگر احتمال آن پمنپمناز … بهتر است پjپ�در فاصله بیشتر از یک آستانه از پیش تعریف شده است – یعنی پr (پمن<دمن تی _پj) > τپ�(پمن<دمنستیپ�)>�– ما این را می گوییم پمنپمنمسلط است پjپ�در فاصله (یعنی پمن≺دمن تی _پjپمن≺دمنستیپ�).
تعریف 5.
(خط آسمان بر اساس آستانه ها) اگر 1 – τ≤ Pr (پمن<دمن تی _پj) ≤ τ1–�≤پ�(پمن<دمنستیپ�)≤�یا 1 – τ≤ Pr (پj<دمن تی _پمن) ≤ τ1–�≤پ�(پ�<دمنستیپمن)≤�، پمنپمنو پjپ�نمی توانند در فاصله بر یکدیگر تسلط داشته باشند و اگر هیچ نقطه داده دیگری نمی تواند بر یکدیگر تسلط داشته باشد پمنپمنیا پjپ�، هر دو متعلق به خطوط آسمان هستند.
در اینجا احتمال با نسبت دو ناحیه تعریف می شود ( شکل 4 و معادله ( 11 ) را ببینید). پرس و جوهای خط افق مانند Pei و همکاران، جستارهای احتمالی خط افق نیستند. [ 27 ] که در آن احتمالات وقوع احتمالی هر جهان ممکن را از فضای PWS (معناشناسی جهان ممکن) که توسط اشیاء داده نامشخص تشکیل شده است نشان می دهد.
4. ارزیابی تغییرات خط افق تحت حرکت افزایشی
4.1. هرس با استفاده از خواص هندسی
نتایج نهایی خط افق شامل نقاطی است که هیچ خط افق دیگری، چه از نظر فاصله و چه در تمام ابعاد ایستا، بر آنها غالب نیست. بنابراین، اگر پمنپمننمی تواند تسلط یابد پjپ�در ابعاد استاتیک، پمنپمننمی تواند تسلط یابد پjپ�پس از در نظر گرفتن بعد فاصله به این معنا که، پمنپمنمی تواند تسلط یابد پjپ�فقط اگر پمنپمنمسلط یا حداقل برابر است پjپ�در تمام ابعاد استاتیک بنابراین، ما می توانیم از نتایج استاتیک خط آسمان و اولین روابط فضایی نقاط داده برای به حداقل رساندن مقیاس داده ها و کاهش دسترسی های غیر ضروری به داده ها استفاده کنیم.
لم 2.
برای نقطه پرس و جو q در زمان t، if سپfسپ�دورترین نقطه در اسs t aاسستیآبه نقطه پرس و جو q، سپس هر نقطه پتیپتیکه نمی تواند تسلط یابد سپfسپ�در فاصله در نیست اساس.
اثبات
به طور مشخص، پتی∉اسs t aپتی∉اسستیآ، بدین ترتیب ∃ s p ∈اسs t a∃سپ∈اسستیآ، و s pسپمسلط است پتیپتیدر ابعاد استاتیک از آنجا که سپfسپ�دورترین نقطه در اسs t aاسستیآبه نقطه پرس و جو qs pسپمسلط است سپfسپ�در فاصله و سپfسپ�مسلط است پتیپتیدر فاصله؛ بدین ترتیب، پتیپتیتحت سلطه است s pسپهنگام در نظر گرفتن فاصله و ابعاد استاتیک، پتی∉ اسپتی∉اس. ☐
لم 2 هنگام پردازش پرس و جوهای خط افق، یک کران جستجو را نشان می دهد. ما می توانیم قبل از پردازش پرس و جو بخشی از نقاط داده غیرمجاز را هرس کنیم: نقاطی که از نظر فاصله توسط همه نقاط در غالب هستند. اسs t aاسستیآرا می توان حذف کرد. علاوه بر این، اگر خطای رانش δ و سرعت تخمینی یک نقطه پرس و جو را محدود کندv�داده می شود، دامنه توپ در مدل حرکت افزایشی تعیین می شود.
لم 3.
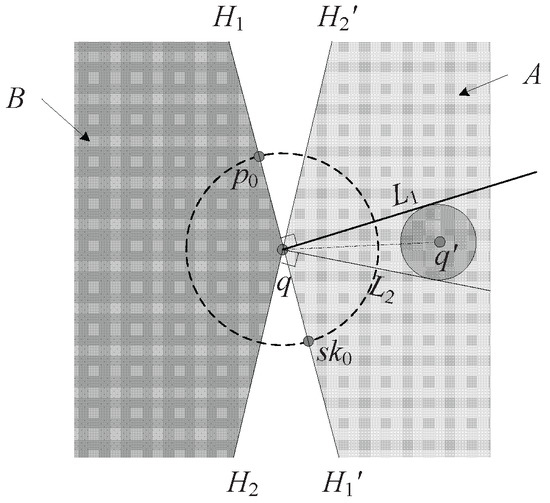
همانطور که در شکل 5 نشان داده شده است ، خطوط مماس توپ مدل حرکت افزایشی عبارتند از L1�1، L2�2( شکل 3 ب را ببینید). از طریق نقطه پرس و جو q خطوط می کشیم اچ1اچ“1اچ1اچ1“، اچ2اچ“2اچ2اچ2“عمودی به L1�1و L2�2، به ترتیب. همه این خطوط کل فضای منطقه را به سه قسمت تقسیم می کنند: منطقه A، منطقه B، و منطقه باقی مانده. سپس، برای هر نقطه داده p در منطقه B، اگر یک نقطه داده وجود داشته باشد s kسکدر منطقه A و برآورده می کند s k ≺ pسک≺پدر حالی که نقطه پرس و جو در منطقه قرار دارد L1qL2�1��2، p نمی تواند در افق نهایی باشد.
اثبات
در ابتدا p تحت سلطه است s kسک، بنابراین s kسکدر تمام ابعاد استاتیک بر p غالب است (یا برابر است) .دi s t ( s k , q) ≤ دi s t ( p , q)دمنستی(سک،�)≤دمنستی(پ،�). ممکن است دو موقعیت در آینده وجود داشته باشد:
برای وضعیت 1، حالت شدید را در نظر بگیرید: s kسکدر مرز منطقه A قرار دارد ( qاچ“1�اچ1“یا qاچ“2�اچ2“، سپس q را به عنوان مرکز و دمن تی ( s _ک0، ق)دمنستی(سک0،�)به عنوان شعاع رسم دایره ( شکل 5 را ببینید ). فقط باید ثابت کنیم که هر نقطه داده p در ناحیه B یا خارج از دایره، اگر p غالب باشد سkسکدر ابتدا، همچنان تحت سلطه خواهد بود s kسکدر آینده. پ0پ0یکی از موارد شدید است: از طریق نقطه q یک خط عمودی به رسم می کنیم پ0سک0پ0سک0(یعنی خط L1�1، زیرا کل ناحیه تخمینی q در سمت راست خط قرار دارد، بنابراین سک0سک0به نقطه پرس و جو نزدیکتر از پ0پ0در آینده و سک0سک0هنوز هم مسلط است پ0پ0.
برای وضعیت 2، اگر s kسکاز خط افق خارج می شود، یک نقطه وجود دارد سک“≺ s kسک“≺سک; در این مورد، سک“سک“مسلط است (یا برابر است با) s kسکدر تمام ابعاد استاتیک و دمن تی ( s _ک“، ق) ≤دi s t ( s k , q)دمنستی(سک“،�)≤دمنستی(سک،�). با اشاره به وضعیت 1، s k ≺ pسک≺پهمچنان پابرجاست، پس سک“≺ صسک“≺پو p را می توان با خیال راحت هرس کرد. ☐
ما از Lemma 3 برای تقسیم یک مجموعه داده به چندین منطقه استفاده می کنیم و هر نقطه داده را بر اساس منطقه ای که به آن تعلق دارد تأیید می کنیم، سپس نقاطی را که پتانسیل ورود به خط آسمان را ندارند هرس می کنیم. اساسدر آینده.
لم 4.
بر اساس Lemma 3، محدودیت زیر را اضافه می کنیم: زاویه مدل حرکت افزایشی α ≤60∘�≤60∘همانطور که در شکل 6 الف نشان داده شده است. L خط امتداد معکوس نیمساز زاویه ای است ∠L1qL2∠�1��2، اچ2اچ“2اچ2اچ2“و L کل فضای منطقه را به چند قسمت تقسیم می کند که با رنگ خاکستری تیره و خاکستری روشن مشخص می شود. زمانی که نقطه پرس و جو q همچنان در منطقه تخمینی قرار دارد و یکی از دو حالت زیر برآورده می شود، نقطه داده p نمی تواند در خط آسمان نهایی باشد:
- 1 .
-
p در منطقه قرار دارد D1�1و نقطه دیگری بر آن غالب است اساسکه در سی1سی1.
- 2 .
-
p در منطقه قرار دارد D2�2و نقطه دیگری بر آن غالب است اساسکه در سی2سی2.
توجه داشته باشید که D1�1، D2�2، سی1سی1، و سی2سی2مناطق ذوزنقه ای در شکل 6 هستند .
اثبات
از تجزیه و تحلیل بالا، برای یک نقطه داده p واقع در منطقه D1�1ما فقط باید این را ثابت کنیم s kسکهمچنان p در فاصله غالب است. مشابه اثبات لمای 3، وقتی α ≤60∘�≤60∘، عمود بر p و را رسم می کنیمs kسک، منطقه تخمینی q بر روی است s kسکضلع عمود بر عمود بر شکل 6 یک وضعیت شدید را نشان داده است. زیرا اچ1اچ“1اچ1اچ1“، اچ2اچ2اچ2اچ2عمود بر عمود بر هستند L1�1و L2�2، به ترتیب، α + β= β+ γ�+�=�+�، سپس α = γ�=�. به طور مشخص، γ+ 2 θ =180∘�+2�=180∘. چه زمانی γ=60∘�=60∘، پ0سک0∥اچ2اچ“2پ0سک0∥اچ2اچ2“، پس عمود بر عمود بر پ0سک0پ0سک0خط است L2�2، به عنوان منطقه تخمینی q بر روی است سک0سک0طرف از L2�2، سک0سک0هنوز هم مسلط است پ0پ0در آینده. وقتی p متعلق به منطقه باشد D2= a r e a ( L qاچ2)�2=آ�هآ(��اچ2)متقارن به D1�1، مشابه وضعیت 1، p غالب است همانطور که در شکل 6 ب نشان داده شده است. ☐
لم 5.
همانطور که در شکل 7 نشان داده شده است ، اجازه دهید α زاویه مدل حرکت افزایشی باشد، سپس زاویه اضافی α را به بیرون اضافه می کنیم. L1�1، L2�2، و دو خط کمکی بکشید L“1�1“و L“2�2“. پس از گذشت زمان s، فرض کنید که موقعیت تخمینی نقطه پرس و جو است q“�“. اگر در ابتدا هر نقطه داده p در منطقه P تحت سلطه یک نقطه باشد s kسکدر منطقه S، p در زمان سپری شده s نمی تواند در خط افق باشد.
اثبات
مشابه اثبات لمای 3، ابتدا عمود بر عمود p و را رسم می کنیم.s kسکو چیزی که باید ثابت کنیم این است که ناحیه تخمینی q روی است s kسکضلع عمود بر عمود بر شکل 7 حالت شدید را نشان می دهد: عمود بر عمود را رسم کنید سک0سک0و پ0پ0، سک0سک0مسلط است پ0پ0در ابتدا، در این وضعیت، نیمساز عمود از موقعیت شروع q می گذرد . علاوه بر این، ∠L“1qL1= ∠L1qL2= α∠�1“��1=∠�1��2=�، بنابراین عمود بر عمود بر آن است L1�1. منطقه تخمینی q بر روی است سک0سک0طرف از L1�1، سک0سک0هنوز هم مسلط است پ0پ0در زمان سپری شده از s . ☐
4.2. تغییر خط افق در زیر زمینه های متحرک
وقتی نقطه پرس و جو حرکت می کند، تسلط نقاط داده ممکن است تغییر کند. همانطور که در شکل 8 نشان داده شده است ، در زمان تی1تی1، پr (پj<دمن تی _پمن) = 1پ�(پ�<دمنستیپمن)=1، پj≺دمن تی _پمنپ�≺دمنستیپمن، و در زمان تی5تی5، پr (پمن<دمن تی _پj) = 1پ�(پمن<دمنستیپ�)=1، پمن≺دمن تی _پjپمن≺دمنستیپ�. فواصل تا نقطه پرس و جو q از پمنپمنو پjپ�همپوشانی در زمان تی2تی2، تی3تی3، و تی4تی4. اگرچه رابطه تسلط فاصله در این لحظات نامشخص است، ما هنوز هم میتوانیم احتمال تسلط را در فاصله محاسبه کنیم.
در لحظه تی3تی3، عمود بر عمود بر پمنپjپمنپ�از مرکز می گذرد، پr (پj<دمن تی _پمن) = 0 . 5پ�(پ�<دمنستیپمن)=0.5، با توجه به تنظیم آستانه 0 . 5 ≤ τ≤ 10.5≤�≤1، رابطه غالب در فاصله احتمالاً تغییر می کند. در لحظه تی3تی3، رابطه با τ تعیین می شود . به طور شهودی، ما تنظیم کردیم τ= 0 . 5�=0.5، و t لحظه ای است که رابطه غالب فاصله بین دو نقطه داده تغییر می کند که به آن تقاطع می گویند. یک نقطه افق ممکن است پس از زمان t از خط افق خارج شود . از طرف دیگر، یک نقطه غیر افق در زمان t ممکن است وارد خط افق شود. در شکل 8 ، بعد از زمان تی2تی2 سمنسمنباید تحت سلطه یک نقطه افق باشد سjس�. آن نقاطی که قبلاً بر نقطه غالب بودند تی2تی2تسلط بر آن را متوقف خواهد کرد. اگر τ> 0 . 5�>0.5، به دلیل تغییر رابطه سلطه در فاصله، زمانی که پjپ�خط افق را ترک می کند دیرتر از تی2تی2. به طور مشابه، زمانی که پمنپمنوارد خط افق می شود زودتر از تی2تی2. یعنی هر دو پjپ�و پمنپمنتا زمانی که نتوانند در فاصله دور بر یکدیگر مسلط شوند، در خط افق باقی خواهند ماند. اگر تقاطع وجود نداشته باشد، رابطه تسلط فاصله بدون تغییر باقی می ماند. اینکه یک تقاطع بر خط افق تأثیر می گذارد یا نه، بستگی به مجموعه ای دارد پمنپمنو پjپ�متعلق به درست قبل از زمان t . بدیهی است که هر تقاطع باعث تغییر خط افق نمی شود. جدول 2 تغییرات احتمالی تسلط را پس از یک تقاطع نشان می دهد.
ما قضایای زیر را داریم تا این احتمالات را به تفصیل شرح دهیم.
قضیه 1.
اگر یکی از شرایط زیر قبل از t برقرار باشد، تقاطع تأثیری بر خط افق ندارد:
- 1 .
-
در همه شرایط، پمن∈اسs t aپمن∈اسستیآ، پj∈ اسپ�∈اس;
- 2 .
-
در همه شرایط، پمن∉ اسپمن∉اس;
- 3 .
-
در شرایط C، پمن∈ اسپمن∈اس، پj∉ اسپ�∉اس;
- 4 .
-
در شرایط B، پمن∈اسc h gپمن∈اسجساعت�، پj∈ اسپ�∈اس.
توجه داشته باشید که شرایط A، B، C در جدول 2 نشان داده شده است .
اثبات
-
اگر پمن∈اسs t aپمن∈اسستیآ، بدیهی است که پمنپمنخط افق را ترک نمی کند مانند پj∈ اسپ�∈اس، دو حالت وجود دارد. ابتدا فرض می کنیم که پj∈اسs t aپ�∈اسستیآ. بدین ترتیب، پjپ�هنوز در خط افق است و خط افق بدون تغییر باقی می ماند. دوم، ما این را فرض می کنیم پj∈اسc h gپ�∈اسجساعت�. از آنجا که پj∈ اسپ�∈اس، هیچ نقطه p وجود ندارد که غالب باشد پjپ�. قبل از زمان t ، نقاطی که پتانسیل تسلط دارند پjپ�با پjپ�. بنابراین، پjپ�هنوز در است اسc h gاسجساعت�و هیچ تغییری در خط افق ایجاد نمی کند.
-
از آنجا که پمن∉ اسپمن∉اسقبل از زمان t باید حداقل یک نقطه وجود داشته باشد s k ∈ Sسک∈اسدر خط افق که بر آن مسلط است. تقاطع هیچ تاثیری روی s k≺دمن تی _پمنسک≺دمنستیپمناگر پj∈اسs t aپ�∈اسستیآو پjپ�خط افق را ترک نخواهد کرد علاوه بر این، اگر پj∈اسc h gپ�∈اسجساعت�، به همان دلیلی که در مورد (1) وجود دارد، پjپ�در خط افق خواهد ماند اگر پj∉ اسپ�∉اسمانند مورد (1).
-
از آنجا که پمن∈ اسپمن∈اس، دو حالت وجود دارد: پمن∈اسs t aپمن∈اسستیآو پمن∈اسc h gپمن∈اسجساعت�. ابتدا فرض می کنیم پمن∈اسs t aپمن∈اسستیآ. سپس، پمنپمنبعد از تقاطع هنوز در خط افق است. سپس، ما فرض می کنیم پمن∈اسc h gپمن∈اسجساعت�. از یک طرف، زیرا پj∉ اسپ�∉اس، پjپ�نمی تواند تسلط یابد پمنپمندر تمام ابعاد استاتیک و پمنپمنهنوز یک نقطه خط افق بعد از تقاطع است. از سوی دیگر، پj∉ اسپ�∉اسو پمنپمنو پjپ�نمی توانند از راه دور بر یکدیگر مسلط شوند، بنابراین پjپ�قادر به تسلط نیست پمنپمن، باید نکته ای وجود داشته باشد p ∈ Sپ∈اسکه غالب است پjپ�. بنابراین هیچ تلاقی بین p و وجود نداردپjپ�، p ≺پjپ≺پ�و پj∉ اسپ�∉اس.
-
به همان دلیلی که در مورد (1) پjپ�بعد از تقاطع هنوز در خط افق است. پمن∈اسc h gپمن∈اسجساعت�، فرض کن که پjپ�مسلط است پمنپمندر تمام ابعاد استاتیک بعد از تقاطع، پjپ�و پمنپمننمی توانند از راه دور بر یکدیگر مسلط شوند، بنابراین پjپ�نمی تواند تسلط یابد پمنپمن. بدین ترتیب، پمن∈اسc h gپمن∈اسجساعت�.
☐
قضیه 2.
اگر یکی از شرایط زیر قبل از t برقرار باشد، یک تقاطع ممکن است روی خط افق تأثیر بگذارد:
- 1 .
-
در شرایط A یا B، پمن∈ اسپمن∈اس، پj∉ اسپ�∉اس;
- 2 .
-
در شرایط A یا C، پمن∈اسc h gپمن∈اسجساعت�، پj∈ اسپ�∈اس.
توجه داشته باشید که شرایط A، B و C در جدول 2 نشان داده شده است
اثبات
-
اولاً این را فرض کنید پمن∈اسs t aپمن∈اسستیآ. بنابراین، پمنپمنبعد از تقاطع هنوز در خط افق است. از آنجا که پj∉ اسپ�∉اس، باید حداقل یک نقطه افق در آن وجود داشته باشد اساستسلط بر آن اگر پمنپمنمسلط است پjپ�قبل از t و سپس بعد از t ممکن است یکی از شرایط زیر وجود داشته باشد: پj≺دمن تی _پمنپ�≺دمنستیپمنیا پمنپمنو پjپ�نمی توانند از راه دور بر یکدیگر مسلط شوند. در نتیجه، پjپ�در هر دو موقعیت بعد از t وارد آسمان می شود .
-
به طور مشخص، پjپ�بعد از t از خط افق خارج نخواهد شد . پمن∈اسc h gپمن∈اسجساعت�، پj∈ اسپ�∈اس، اگر پjپ�مسلط است پمنپمندر تمام ابعاد استاتیک، بعد از tپمنپمناز آن زمان خط افق را ترک خواهد کرد پj≺دمن تی _پمنپ�≺دمنستیپمن.
☐
طبق قضیه 2، ما فقط باید دو مورد زیر را در نظر بگیریم که در آنها ممکن است خط افق تغییر کند:
-
در ابتدا، سمن∈ اسسمن∈اس، سn∉ اسس�∉اس، و سمن≺سnسمن≺س�. بعد از یک تقاطع، سمنسمندیگر نمی تواند تسلط یابد سnس�، سپس سnس�می تواند وارد خط افق شود و بستگی به این دارد که آیا سمنسمننقطه افق منحصر به فردی است که بر آن مسلط است.
-
در ابتدا، سمن∈اسc h gسمن∈اسجساعت�، سjس�مسلط است سمنسمندر تمام ابعاد استاتیک بعد از یک تقاطع، سمنسمنمی تواند تحت سلطه باشد سjس�و خط افق را ترک کنید.
5. محاسبه خط آسمان
5.1. پردازش مستمر پرس و جو Skyline
ما اکنون تکنیک های پردازش پرس و جو پیوسته خط افق را مطابق با تجزیه و تحلیل بالا بررسی می کنیم. یک راه ساده این است که الگوریتم های موجود را فراخوانی کنیم تا پرس و جوهای خط آسمان را در هر مرحله زمانی پردازش کنیم تا نتایج پرس و جو مستمر را بدست آوریم. از آنجایی که ما موقعیت تخمین زده شده نقطه پرس و جو و پارامترهای مدل حرکت افزایشی مرتبط را می دانیم، نتایج معتبر هستند. با این حال، پردازش پرسوجوهای خط آسمان پیوسته به این روش نیاز به پیمایش مکرر کل مجموعه داده دارد که به ناچار زمان اجرا و ورودی/خروجی را افزایش میدهد. در عمل، سرعت یک نقطه پرس و جو خیلی سریع نیست. بنابراین، خط افق اغلب تغییر نخواهد کرد. به عنوان مثال، همانطور که در بخش 1 ذکر شد، کاربر به دنبال رستوران است. سرعت حرکت او قابل توجه است نه خیلی سریع. بنابراین، نتایج خط آسمان در آخرین لحظه می تواند برای پردازش پرس و جوهای خط آسمان لحظه بعدی استفاده شود. در غیر این صورت، اگر سرعت خیلی سریع باشد یا فاصله زمانی آنقدر زیاد باشد که نتایج خط آسمان در آخرین مرحله زمانی همه در لحظه بعد تغییر کند، ما ترجیح میدهیم از پرسوجوهای افق تصویر فوری برای این موقعیت استفاده کنیم. برای مثالهای انگیزشی، اینها اتفاق نمیافتد. بنابراین، در این مقاله، ما فرض میکنیم که نقاط پرس و جو خیلی سریع حرکت نمیکنند و نتایج خط آسمان در آخرین لحظه میتوانند برای پردازش پرس و جو مرحله بعدی استفاده شوند. برای مشکل، میتوانیم از استراتژیهای ذکر شده در بخشهای قبلی برای محاسبه تقاطعهایی که ممکن است بر خط آسمان تأثیر بگذارند و نتایج خط آسمان را به صورت تدریجی حفظ کنیم، استفاده کنیم.
ابتدا خط آسمان اولیه را محاسبه می کنیم. پس از آن، تصمیم میگیریم که چه لحظهای ممکن است باعث تغییر خط افق شود و تقاطعهایی را که نتایج خط آسمان ممکن است تغییر کند را ثبت میکنیم. سپس، هنگامی که یک تقاطع می آید، با آن برخورد می کنیم و تقاطع های بعدی را برای به روز رسانی خط آسمان تعیین می کنیم.
نتیجه 1.
فرض کنید که فواصل نقاط افق سمنسمن، سjس�، و سکسکبه نقطه پرس و جو تخمین زده شده یک دنباله در حال افزایش است، سپس تقاطع بین سمنسمنو سکسکقبل از تقاطع بین هر دو نقطه مجاور رخ نخواهد داد سمنسمن، سjس�، و سکسک.
اثبات
فرض کن که سمنسمنو سjس�در زمان قطع می شوند تیایکستیایکس، سjس�، سکسک، و سمنسمن، سکسکدر زمان قطع می شوند تیyتی�، تیzتی�، به ترتیب. قبل از تقاطع، ما این را می دانیم سمن<دمن تی _سj<دمن تی _سکسمن<دمنستیس�<دمنستیسکو ما فقط باید این را ثابت کنیم تیzتی�باید دیرتر از تیایکستیایکسو تیyتی�. حالا فرض کنید که تیzتی�زودتر از تیایکستیایکسیا تیyتی�. بنابراین، پس از زمان تیzتی�، سک<دمن تی _سمنسک<دمنستیسمن. علاوه بر این، سمن<دمن تی _سjسمن<دمنستیس�هنوز معتبر است زیرا هیچ تقاطعی بین هر دو نقطه مجاور اتفاق نمی افتد، که در تضاد است سک<دمن تی _سمنسک<دمنستیسمن. از این رو، تیzتی�باید دیرتر از تیایکستیایکسو تیyتی�. ☐
ما خطوط آسمان را به ترتیب با توجه به فاصله آنها تا نقطه پرس و جو ذخیره کردیم. ما همچنین فقط نیاز به محاسبه تقاطع بین دو نقطه افق مجاور داریم.
5.2. ساختار و شرایط داده
ما از یک لیست پیوندی دو طرفه استفاده می کنیم (سایر ساختارهای داده مشابه، مانند پشته و آرایه نیز خوب هستند، زیرا این ساختارها را پردازش می کنیم نه “آنلاین”؛ در عوض، آنها می توانند در بازه زمانی دو مرحله زمانی پردازش شوند) به نام L L��برای ذخیره نقاط خط افق فعلی، که به ترتیب صعودی فاصله آنها تا نقطه پرس و جو مرتب شده اند. شکل هر نقطه افق سمنسمنکه در L L��به عنوان مشخص می شود ( فl a g، دمن هستم ، _تیv a l i d،تیs k i p)(�لآ�،دمنستی،تی�آلمند،تیسکمنپ). fl a g�لآ�نشان می دهد که آیا سمنسمنمتعلق به اسs t aاسستیآ، دمن تی _دمنستیفاصله بین است سمنسمنو نقطه پرس و جو qتیv a l i dتی�آلمندزمان اعتبار است سمنسمن، که فقط برای هر نقطه افق در حال تغییر و ضبط زمان در دسترس است سمنسمنتحت سلطه است و تیs k i pتیسکمنپزمان است سمنسمنموقعیت خود را با جانشین خود در L L��(برای جزئیات بیشتر به الگوریتم های زیر مراجعه کنید).
با قضیه 2، دو موقعیت وجود دارد که ممکن است باعث تغییر خط آسمان شود. زمان تقاطع را فرض کنید تیi n s e cتیمن�سهج( τ= 0 . 5�=0.5):
-
قبل از زمان تیi n s e cتیمن�سهج، سمنسمنیک نقطه افق در حال تغییر است. سjس�از نقطه پرس و جو دورتر از q استسمنسمن، و سjس�مسلط است سمنسمندر تمام ابعاد استاتیک پس از تیi n s e cتیمن�سهج، سمنسمنتحت سلطه خواهد بود سjس�و خط افق را ترک کنید.
-
قبل از زمان تیi n s e cتیمن�سهج، سمنسمننقطه افق است، و سnس�یک نقطه غیر افق است. پس از تیi n s e cتیمن�سهج، سnس�بسته به اینکه آیا می تواند وارد خط افق شود سمنسمننقطه افق منحصر به فردی است که بر آن مسلط است.
برای خلاصه کردن تحلیل فوق، فقط باید مواردی را در نظر بگیریم که ممکن است باعث تغییر خط افق شود. برای سادگی، این مقاله دو فرض را در آستانه τ ایجاد کرده است :
-
عمود بر عمود بر پمنپjپمنپ�در مدل حرکت افزایشی از مرکز توپ عبور می کند، بنابراین θ =90∘�=90∘، می توانیم از لمای 1 نتیجه بگیریم که:
برای τ= 0 . 5�=0.5، قبل از زمان تی2تی2، پj≺دمن تی _پمنپ�≺دمنستیپمن، و بعد از آن پمن≺دمن تی _پjپمن≺دمنستیپ�(همانطور که در شکل 8 نشان داده شده است ).
-
فرض کنید که عمود بر عمود بر پمنپjپمنپ�از نقطه C عبور می کند که 1/4 قطر است ( شکل 4 را ببینید ). یعنی | qسی| = 1/2 | _ _ qA ||�سی|=1/2|�آ|. از این رو، cos θ = 0 . 5cos�=0.5، و θ =60∘�=60∘; می توانیم از لم 1 بدست آوریم که:
برای راحتی محاسبه، ما تنظیم می کنیم پr (پمن<دمن تی _پj) = τپ�(پمن<دمنستیپ�)=�.
قضیه 3.
همانطور که در شکل 8 نشان داده شده است ، فرض کنید که مختصات موقعیت پ1پ1، پ2پ2هستند (ایکس1،y1)(ایکس1،�1)و (ایکس2،y2)(ایکس2،�2). نقطه پرس و جو از شروع می شود (ایکسq،yq)(ایکس�،��)با سرعت v (vایکس،vy)�(�ایکس،��)، سپس زمان تقاطع را می توان به صورت زیر ارائه کرد:
- 1 .
-
τ= 0 . 5�=0.5، t =yq– کایکسq– سیکvایکس–vyتی=��–کایکس�–سیک�ایکس–��
- 2 .
-
τ=13–3√4 π�=13–34�، زمان تقاطع هستند تی2تی2و تی4تی4، تی2تی2و تی4تی4را می توان به صورت زیر ارائه کرد: تی2=کایکسq–yq+ سیδ| v |ک2+ 1√– کvایکس+vyتی2=کایکس�–��+سی�|�|ک2+1–ک�ایکس+��، تی4= –k x q– yq+ سیδ| v |ک2+ 1√+ kvایکس–vyتی4=–کایکس�–��+سی�|�|ک2+1+ک�ایکس–��جایی که k =ایکس1–ایکس2y2–y1ک=ایکس1–ایکس2�2–�1، سی=y1+y22– کایکس1+ایکس22سی=�1+�22–کایکس1+ایکس22.
اثبات
مختصات از پ1پ1، پ2پ2هستند (ایکس1،y1)(ایکس1،�1)و (ایکس2،y2)(ایکس2،�2)، عمود بر عمود بر پ1پ2پ1پ2که با L نشان داده می شود را می توان به صورت زیر نوشت: y–y1+y22=ایکس1–ایکس2y2–y1( x- _ایکس1+ایکس22)�–�1+�22=ایکس1–ایکس2�2–�1(ایکس–ایکس1+ایکس22); به این معنا که، ایکس1–ایکس2y2–y1x – y+ (y1+y22–ایکس1–ایکس2y2–y1ایکس1+ایکس22) = 0ایکس1–ایکس2�2–�1ایکس–�+(�1+�22–ایکس1–ایکس2�2–�1ایکس1+ایکس22)=0. اجازه دهید k =ایکس1–ایکس2y2–y1ک=ایکس1–ایکس2�2–�1، سی=y1+y22– کایکس1+ایکس22سی=�1+�22–کایکس1+ایکس22:
-
اگر τ= 0 . 5�=0.5، ما فقط باید محاسبه کنیم که نقطه پرس و جو با عمود بر عمود بر چه زمانی ملاقات می کند پ1پ2پ1پ2; یعنی لحظه پ1پ1و پ2پ2برابر است با فاصله تا نقطه پرس و جو: (ایکسq+ تیvایکس–ایکس1)2+(yq+ تیvy–y1)2=(ایکسq+ تیvایکس–ایکس2)2+(yq+ تیvy–y2)2(ایکس�+تی�ایکس–ایکس1)2+(��+تی��–�1)2=(ایکس�+تی�ایکس–ایکس2)2+(��+تی��–�2)2، سپس t =yq– کایکسq– سیکvایکس–vyتی=��–کایکس�–سیک�ایکس–��
-
اگر τ=13–3√4 π�=13–34�، در زمان تی2تی2و تی4تی4، نقطه پرس و جو شرط 1/4 قطر را برآورده می کند ( شکل 4 را ببینید ) ، زمان تی1تی1و تی5تی5گشتاورهای مماسی عمود بر عمود و کران توپ در مدل حرکت افزایشی هستند. ما زمان را استخراج می کنیم تی4تی4از طريق تی3تی3و تی5تی5; تی2تی2مشابه است. سرعت عمودی عمود بر عمود نشان داده می شود v⊥�⊥. در زمان تی5تی5، فاصله از نقطه پرس و جو تا L برابر است با شعاع فعلی توپ در مدل حرکت، بنابراین ما داریم | k (ایکسq+vایکستی5) – (yq+vyتی5) +C|ک2+ 1√= δ| v |تی5|ک(ایکس�+�ایکستی5)–(��+��تی5)+سی|ک2+1=�|�|تی5. طبق (1) تی3=yq– کایکسq– سیکvایکس–vyتی3=��–کایکس�–سیک�ایکس–��، سپس v⊥�⊥را می توان به دست آورد v⊥=δ| v |تی5تی5–تی3�⊥=�|�|تی5تی5–تی3. بنابراین، از تی3تی3به تی4تی4، فاصله در جهت تغییر می کند v⊥�⊥برابر با نصف شعاع است. بنابراین، v⊥(تی4–تی3) =12δ| v |تی4�⊥(تی4–تی3)=12�|�|تی4.
بر اساس معادلات فوق به عنوان نتیجه گیری تی4= –کایکسq–yq+ سیδ| v |ک2+ 1√+ kvایکس–vyتی4=–کایکس�–��+سی�|�|ک2+1+ک�ایکس–��. به همین ترتیب، تی2=کایکسq–yq+ سیδ| v |ک2+ 1√– کvایکس+vyتی2=کایکس�–��+سی�|�|ک2+1–ک�ایکس+��. ☐
همانطور که نقطه پرس و جو حرکت می کند، فاصله بین تمام نقاط داده و نقطه پرس و جو متفاوت است، که ممکن است باعث تغییر خط آسمان شود. با توجه به نوع تغییر، سه رویداد به شرح زیر فرموله می شود:
-
رویداد e x i tهایکسمنتی. این زمانی اتفاق میافتد که هر نقطه افق خط افق را ترک کند، که فقط برای یک خط افق فرار اتفاق میافتد. فرض کن که سمن∈اسc h gسمن∈اسجساعت�، و نقطه افق دیگری وجود دارد سjس�با پتانسیل تسلط سمنسمن، سپس اگر سمنسمنتلاقی می کند با سjس�در فاصله و پr (سj<دمن تی _سمن) > τپ�(س�<دمنستیسمن)>�، سمنسمنخط افق را ترک خواهد کرد. یعنی یک e x i tهایکسمنتیرویداد اتفاق می افتد
-
رویداد من nمن�. این زمانی اتفاق می افتد که هر نقطه غیر افقی وارد خط افق شود. برای یک نقطه غیر افق سnس�و تمام آن نقاط خط افق که در حال حاضر بر آن مسلط هستند، اگر سnس�به نقطه پرس و جو q نزدیکتر می شود تا نقطه افق سمنسمن، سمنسمندیگر نمی تواند بر آن مسلط شود. یعنی یک من nمن�رویداد اتفاق می افتد با این حال، اینکه آیا آن را به خط افق وارد خواهد شد بستگی به این دارد سمنسمنتنها کسی است که بر آن تسلط دارد. هنگامی که رویدادی از این نوع در حال پردازش است، این مورد بررسی می شود.
-
رویداد c hgo r dجساعت���د. این زمانی اتفاق میافتد که چند نقطه افق به داخل میرسند L L��یک تغییر متوالی ایجاد کنید برای نقطه افق سمنسمن، اگر با جانشین خود تلاقی داشته باشد سjس�و سjس�نمی توان بر آن مسلط شد، سمنسمنو سjس�تبادل موقعیت در L L��; یعنی الف c hgo r dجساعت���درویداد اتفاق می افتد توجه کنید که سjس�پتانسیل تسلط را ندارد سمنسمن; در غیر این صورت، یک e x i tهایکسمنتیرویداد به جای آن اتفاق خواهد افتاد.
همانطور که در شکل 9 نشان داده شده است ، لیست شامل { sک1، سک2، سک3، سک4}{سک1،سک2،سک3،سک4}نقاط داده، و نقاط به ترتیب صعودی فاصله آنها تا نقطه پرس و جو مرتب می شوند. در زمان t ، پr ( sک3<دمن تی _سک2) > τپ�(سک3<دمنستیسک2)>�، سک3سک3مسلط است سک2سک2در تمام ابعاد استاتیک سپس، یک e x i tهایکسمنتیرویداد رخ خواهد داد زیرا سک2سک2تحت سلطه خواهد بود و خط افق را ترک می کند ( شکل 9 ب را ببینید). اگر سnس�نقطه افق تحت سلطه است سک3سک3منحصر به فرد، در زمان t ، اگر دمن تی ( q _، سک3) > دمن تی ( q _،سn)دمنستی(�،سک3)>دمنستی(�،س�)، سپس یک من nمن�رویداد رخ خواهد داد زیرا سnس�وارد خط افق خواهد شد ( شکل 9 ج را ببینید). علاوه بر این، در زمان t ، اگر سک3سک3به نقطه پرس و جو q نزدیکتر می شودسک2سک2و سک3سک3پتانسیلی برای تسلط ندارد سک2سک2، سپس یک c hgo r dجساعت���درویداد رخ خواهد داد زیرا سک2سک2و سک3سک3موقعیت های خود را در لیست مبادله خواهند کرد ( شکل 9 د را ببینید).
یک صف سراسری برای حفظ همه رویدادها برای نمایش تغییرات خط افق آینده استفاده می شود. هر رویداد به شکل ( t i m e , t yp e ، s e l f, r e l )(تیمنمتره،تی�په،سهل�،�هل)هنگامی که رویداد در زمان اتفاق می افتد من هستم _ _تیمنمتره، و t yp eتی�پهبرای ثبت نوع این رویداد استفاده می شود. s e l fسهل�و r e l�هلبه ترتیب نقطه افق و نقطه داده مربوطه درگیر در رویداد را نشان می دهند. در یک e x i tهایکسمنتییا c hgo r dجساعت���درویداد، s e l fسهل�نقطه افق را نشان می دهد سمنسمن، در حالی که p e e rپهه�جانشین آن است سjس�. در یک من nمن�رویداد، s e l fسهل�نشان دهنده نقطه افق در حالی است p e e rپهه�مخفف نقطه غیر افقی مربوطه است سnس�.
در ابتدا، L L��شامل تمام نقاط افق فعلی است در حالی که Q حاوی رویدادهای اخیر است که در آینده نزدیک اتفاق می افتد. با سپری شدن زمان، رویدادها در صف صف بندی می شوند و با توجه به نوع آنها رسیدگی می شود. در حین تحویل رویدادها و به روز رسانی خط افق، این فرآیند همچنین رویدادهای ورودی آینده را نیز متحمل می شود. بنابراین، Q با حذف رویدادهای موجود و قرار گرفتن رویدادهای جدید در صف تکامل می یابد. پس از پردازش همه رویدادهای مربوط، L L��شامل تمام نقاط خط افق صحیح با توجه به موقعیت فعلی نقطه پرس و جو q است.
5.3. مکانیسم های رویداد محور برای پردازش پرس و جو مستمر
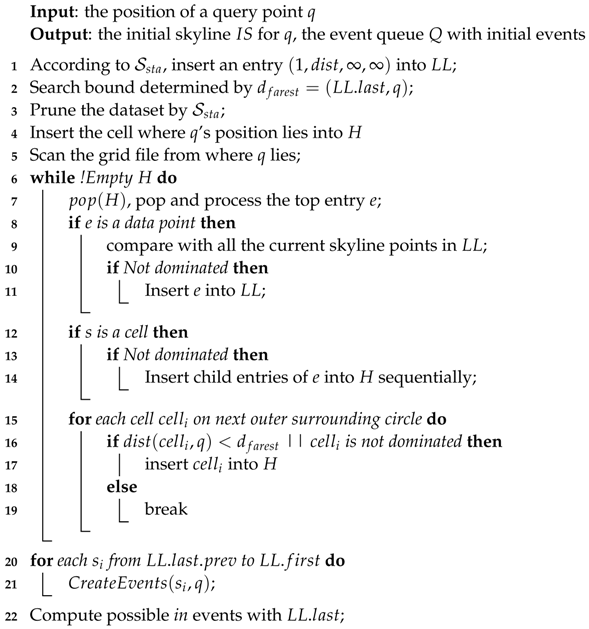
در روش ما برای مجموعه داده های ایستا، از یک فهرست فایل شبکه ای دوبعدی ساده استفاده می کنیم که فضای داده را به h × vساعت×�سلول ها. ما تعیین می کنیم که نقاط داده در هر سلول در یک صفحه دیسک ذخیره شوند. در ابتدای الگوریتم، خط آسمان ثابت از قبل محاسبه می شود. طبق Lemma 2، دورترین فاصله در متغیر ثبت می شود دfa r e s tد�آ�هستیبه عنوان یک جستجو محدود، و سلول های فراتر از آن دfa r e s tد�آ�هستیبرای کاهش ورودی/خروجی ها هرس می شوند ( شکل 10 را ببینید ).
همانطور که در الگوریتم 1 نشان داده شده است، در ابتدا، تمام نقاط خط افق دائمی در داخل هستند اسs t aاسستیآدرج می شوند L L��بر اساس فاصله آنها تا موقعیت شروع نقطه پرس و جو q . ابتدا مجموعه داده را با استفاده از ویژگی های هندسی هرس می کنیم. سپس، با شروع از سلولی که موقعیت اولیه q در آن قرار دارد، تمام سلولهای شبکه به صورت مارپیچی جستجو میشوند به طوری که آنهایی که در یک دایره اطراف درونی قرار دارند قبل از سلولهای روی یک دایره بیرونی جستجو میشوند، همانطور که در شکل 10 نشان داده شده است . سپس مجموعه داده ها را بر اساس لم 3، 4، 5 با ساختار پشته سازماندهی می کنیم. پشته H برای ذخیره سلول ها یا نقاط داده ای استفاده می شود که امکان ورود به خط آسمان وجود دارد، که بالای آن سلول یا نقطه داده ای است که نزدیک ترین نقطه به موقعیت تخمینی q است . نقاط یا سلول ها در پشته به ترتیب با نقاط خط افق فعلی در مقایسه می شوند L L��، که در صورت لزوم با حذف یا درج تنظیم می شود. پس از آن، رویدادها برای پرس و جو پیوسته خط افق ایجاد می شوند – همه رویدادها برای همه نقاط افق، به جز آخرین مورد در L L��. بعد، دورترین نقطه افق برای محاسبه ممکن اعمال می شود من nمن�رویدادها برای نقاط دورتر از آن.
| الگوریتم 1: مقداردهی اولیه |
 |
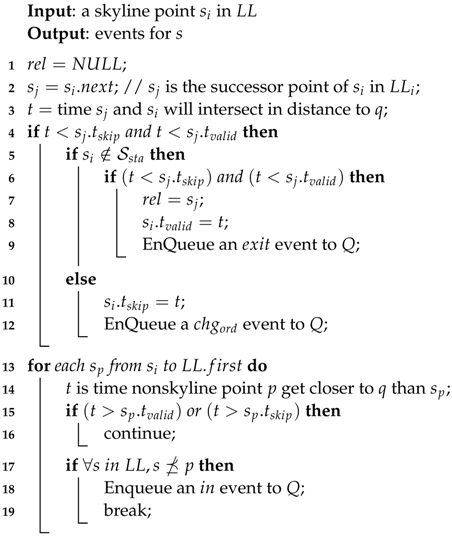
الگوریتم 2 روند CreateEvents را با جزئیات نشان داده است. برای یک نقطه افق مشخص سمنسمن، الگوریتم ابتدا زمان t را محاسبه می کندسمنسمنو نقطه افق بعدی سjس�که در L L��موقعیت های خود را در لیستی که سjس�مسلط خواهد شد سمنسمندر فاصله اگر t دیرتر از سjس�زمان مبادله یا سمنسمنزمان اعتبار، نادیده گرفته می شود. در غیر این صورت، به معنای یک e x i tهایکسمنتیرویداد بسته به سjس�زمان اعتبار اگر سمن∈اسc h gسمن∈اسجساعت�، یا ساده است c hgo r dجساعت���درویداد. سپس محاسبه کنید من nمن�رویدادها برای هر نقطه غیر افقی سnس�که فاصله تا موقعیت تخمینی q در مقایسه باسمنسمنو سjس�فاصله ها
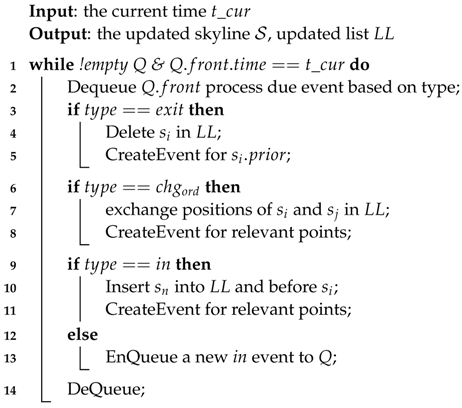
هنگامی که نزدیکترین رویداد در Q اتفاق می افتد، آن را صف بندی کرده و با توجه به نوع آن با نقاط مربوطه درگیر پردازش می شود. سپس پس از به دست آمدن خط آسمان جدید، رویدادهای جدید ایجاد کنید (همانطور که در الگوریتم 3 نشان داده شده است). در هر زمانی که Q خالی است، تمام نقاط وارد می شوند L L��خط افق صحیح نقطه زمانی فعلی هستند.
طبق الگوریتم 3، اقدامات برای پردازش هر نوع رویداد به شرح زیر است: برای یک رویداد خروج، سمنسمناز لیست افق حذف می شود L L��و از زمانی که جانشین تغییر کرده است، رویدادهای جدیدی را برای سلف خود ایجاد می کند. برای یک من nمن�رویداد، نقطه غیر افق سnس�بررسی خواهد شد تا ببینیم که آیا منحصر به فرد است یا خیر سمنسمن. اگر بله، سnس�در لیست افق درج خواهد شد L L��و رویدادهای جدید برای نقاط مرتبط محاسبه می شوند. در غیر این صورت، احتمال جدید است من nمن�رویداد محاسبه و در صف قرار می گیرد. برای یک c hgo r dجساعت���ددر رویداد، لیست خط افق به درستی با تبادل موقعیت های تنظیم می شود سمنسمنو سjس�. به همین ترتیب، رویدادهای مرتبط برای آنها و پیشینیان در صورت وجود ایجاد و در صف قرار می گیرند.
| الگوریتم 2: CreateEvents |
|
| الگوریتم 3: رویداد ناشی از فرآیند |
|
6. استراتژی های هرس برای الگوهای حرکتی خاص
استراتژی های هرس هندسی را می توان به راحتی در مسیرهای متحرک شناخته شده ادغام کرد تا تعداد نقاط داده را کاهش دهد. در این بخش، ما استراتژیهای هرس هندسی را تحت مدل حرکت افزایشی برای سه کلاس مختلف از مسیرها ارائه میکنیم: محصور، محدود، و نامحدود. در صورتی که حرکت یا بخشی از مرز محدوده متحرک یک نقطه پرس و جو مشخص باشد، اگر موقعیت نقطه اکنون واجد شرایط ایجاد یک مدل حرکت افزایشی نباشد، فرض می کنیم که یک “نقطه پرس و جو مجازی” در جایی وجود دارد. گذشته، و توانست در مدل افزایشی اعمال شود. علاوه بر این، حرکت نقطه پرس و جو واقعی – اگرچه با مدل حرکت افزایشی سازگار نیست – در منطقه تخمینی مدل حرکت افزایشی تنظیم شده توسط نقطه پرس و جو مجازی باقی می ماند.
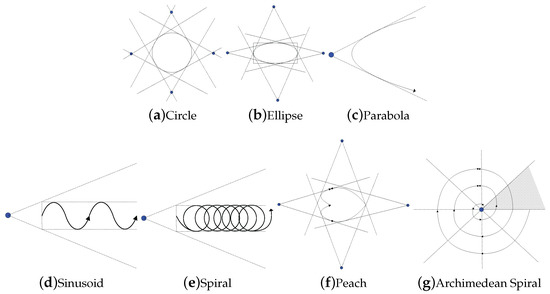
الگوهای حرکت محصور شده اگر حرکت نقطه پرس و جو q یک منحنی محصور باشد، نقطه پرس و جو در ناحیه محصور شده توسط منحنی باقی می ماند. شکل 11 a-c سه الگوی حرکت محصور معمولی است: دایره ، بیضی و سهمی . در این صورت با وجود قبا سرعت حرکت، نقطه در امتداد منحنی حرکت می کند و به طور مکرر بر خط افق تأثیر می گذارد. با در نظر گرفتن ویژگی های منحنی های محصور، می توان کران های بالایی و پایینی دقیق را در تمام جهات یک نقطه پرس و جو به دست آورد. بر اساس تمام منحنیهای بالا، میتوانیم مدلهای حرکت افزایشی را در جهات مختلف ایجاد کنیم تا یک سری نقاط پرس و جو مجازی به دست آوریم. پس از آن، الگوریتم هرس هندسی به صورت مکرر اجرا می شود و بسیاری از نقاط اضافی را که هیچ تأثیری بر خط افق ندارند فیلتر می کند.
الگوهای حرکتی با کران اگر حرکت یک نقطه پرس و جو q منحنی با کران باشد، به این معنی است که می توانیم کران های بالایی و پایینی آن را در یک یا چند جهت بدست آوریم، در حالی که بقیه هیچ مرزی ندارند یا قابل پیش بینی نیستند ( Sinusoid and Spiral دو مورد از این نوع الگوی حرکتی، همانطور که در شکل 11 نشان داده شده استد، ه). با توجه به ویژگی این منحنیها، ما همچنان میتوانیم از موقعیت شروع نقطه پرس و جو و جهتهایی که کرانهها را میتوان برای ایجاد یک مدل حرکت افزایشی، بهدست آوردن یک نقطه مجازی و اعمال استراتژیهای هرس هندسی استفاده کرد. اساساً، اگرچه اثر فیلتر کردن به اندازه وضعیت الگوهای محصور کارآمد نیست، اما در مقایسه با پرسوجوهای خط افق عکس فوری ارزش اجرا دارد.
الگوهای حرکتی بدون کران اگر حرکت نقطه پرس و جو q منحنی بدون کران باشد، در هر جهت نمی توان حدی به دست آورد و استفاده از استراتژی های هرس هندسی بر اساس مدل حرکت افزایشی غیرممکن است (نمونه هایی از این نوع الگوی حرکتی هلو و مارپیچ ارشمیدسی در شکل 11 f , g).
با توجه به ویژگی های انواع مختلف مسیرها، منحنی ها را می توان به صورت زیر طبقه بندی کرد:
7. آزمایشات
A n آ¨آ¨رویکرد اصلی برای نظارت بر خطوط آسمان متحرک، فراخوانی الگوریتمهای موجود مانند I/O BBS بهینه [ 3 ، 4 ] برای محاسبه مجدد خط افق هر زمان که نتایج نیاز به بهروزرسانی دارند، است. در این بخش n را با هم مقایسه می کنیم آ¨آ¨الگوریتمهای ive به روشهای پیشنهادی در برابر عوامل مختلفی که ممکن است عملکرد الگوریتمها را تحت تأثیر قرار دهند. همه الگوریتم ها در C++ استاندارد با پشتیبانی از کتابخانه STL پیاده سازی شده و با GNU GCC 4.9.3 کامپایل شده اند. آزمایشها روی رایانه شخصی با پردازنده دوگانه Intel Core i3-3240 3.40GHz و حافظه 4G با Ubuntu Linux 14.04 LTS اجرا شد. اندازه صفحه دیسک به 4096 بایت ثابت شد.
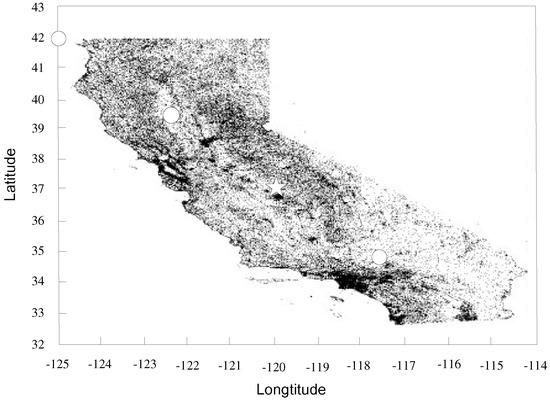
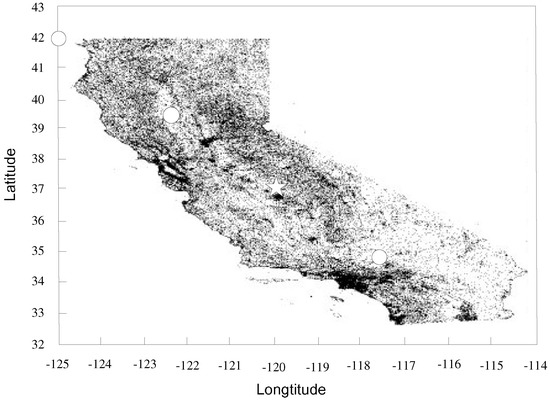
برای تولید مجموعه دادهها برای آزمایشها، ابتدا نکات جالب کالیفرنیا را از وبسایت [ 28 ] دریافت کردیم ( شکل 12 را ببینید)، سپس مکانهای واقعی را با ابعاد غیرمکانی به دنبال توزیعهای مختلف ترکیب کردیم: مستقل، همبسته، ضد همبسته، و Zipf. اندازه دادههای مکانهای واقعی کالیفرنیا حدود 100 K است و ما ابعاد غیرمکانی مانند آن را در مرجع [ 1 ] تولید میکنیم. مقدار مشخصه یک نقطه داده از 1 تا 1000 متغیر بود. زمان CPU و شمارش ورودی/خروجی برای اندازهگیری کارایی الگوریتمها در زیر 100 اجرای پرسوجوهای خط آسمان استفاده شد. پارامترهای مورد استفاده در آزمایشات در جدول 3 فهرست شده است. به طور خاص، الگوریتم های زیر مورد ارزیابی قرار گرفتند:
-
پرس و جو خط افق پیوسته (CSQ): روش افق پیوسته مبتنی بر مدل افزایشی که الگوریتم ردیابی تغییر خط افق را در مرجع [ 5 ] مستقیماً بدون استفاده از استراتژیهای هرس هندسی انجام میدهد.
-
GP-CSQ: روشی که الگوریتم ردیابی تغییر خط آسمان را با استراتژیهای هرس هندسی تنها با استفاده از Lemma 3 (Lmma 4، پسوند آن) انجام میدهد.
-
GP2-CSQ: نمونهای از روشی که الگوریتم ردیابی تغییر خط افق را انجام میدهد همراه با استراتژیهای هرس هندسی با استفاده از لم 3 (لم 4) و 5.
از آنجایی که الگوریتم BBS کارآمدترین روش برای محاسبه خط آسمان در تنظیمات استاتیک است (هم نقاط داده و هم نقطه پرس و جو ایستا هستند)، ما آن را برای مقایسه در آزمایشها اتخاذ کردیم. هنگامی که مکان نقطه پرس و جو تغییر کرد، ما فقط ” ذهن شناس ” را برای تطبیق الگوریتم اصلی BBS تغییر دادیم (به [ 4 ] مراجعه کنید). علاوه بر این، ما همچنین از روشی که در [ 5 ] “ex-BBS” نامیده میشود، برای تضاد با روشهای پیشنهادی خود استفاده کردیم.
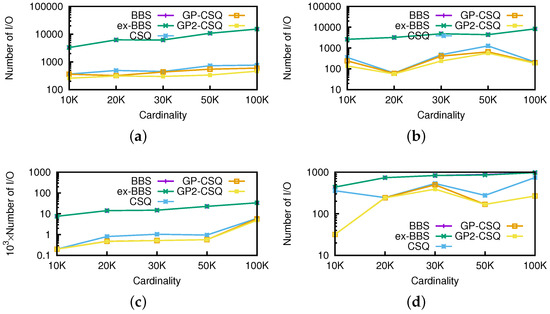
تأثیر کاردینالیته. برای تولید مجموعههای داده با اندازههای مختلف، بخشی از مکانهای واقعی را بهطور تصادفی انتخاب کردیم و سپس با دو بعد غیرفضایی مصنوعی ترکیب کردیم. بنابراین، ما اندازه مجموعه دادهها را از 10 K به 100 K تبدیل کردیم. سپس، 100 (10 برای ضد همبستگی) پرسوجوهای خط آسمان پیوسته را روی مجموعه دادهها اجرا کردیم. برای هر پرس و جو، ما موقعیت شروع نقطه پرس و جو را به صورت (37 ∘∘N، -120 ∘∘W). سرعت پیشفرض نقطه پرس و جو (1، -1) بود، در حالی که جهت حرکت همان بردار (1، -1) بود. آستانه 0.5 ثابت شد.
در شکل 13 ، هزینه CPU الگوریتم CSQ اصلی در برخی موارد بیشتر از الگوریتم های BBS است، زیرا CSQ نه تنها اشیاء غیر خط آسمان را پردازش می کند، بلکه رویدادهای اولیه را برای حفظ خط آسمان در آینده محاسبه می کند. GP-CSQ و GP2-CSQ به طور کلی سریعتر بودند، زیرا سیاستهای هرس هندسی میتوانند تعداد زیادی از نقاط داده غیرمجاز را فیلتر کنند و هزینه پردازش رویداد را کاهش دهند. توجه داشته باشید که در شکل 13 d، CSQ زمان زیادی می برد و اندازه نتایج خط آسمان بزرگ است زیرا مجموعه داده های ضد همبستگی رخدادهای بیشتری را متحمل می شوند. شکل 14نشان می دهد که با افزایش کاردینالیته، I/Oهای CSQ، GP-CSQ، و GP2-CSQ تقریباً 10٪ کمتر از BBS است، در حالی که GP-CSQ و GP2-CSQ کمی بهتر از الگوریتم CSQ هستند.
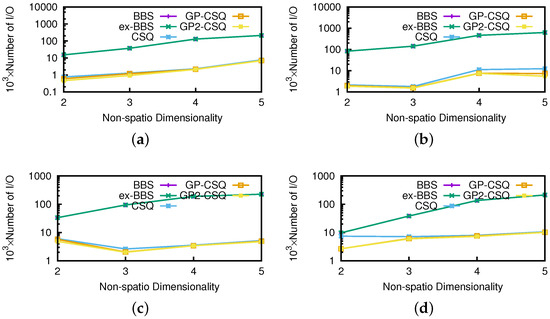
اثر ابعاد غیر فضایی. ما از یک مجموعه داده شبکه جادهای 100 K واقعی همراه با ابعاد غیرمکانی از دو تا پنج برای ارزیابی تأثیر ابعاد غیرمکانی بر روشهای خود استفاده کردیم. مقادیر این ابعاد غیرمکانی از 1 تا 1000 متغیر است. مجموعه پارامترهای دیگر همان است که در جدول 3 نشان داده شده است .
همانطور که در شکل 15 نشان داده شده است ، استراتژی های هرس می توانند در زمان اجرا تا حد معینی صرفه جویی کنند در حالی که از ابعاد غیر مکانی بالاتر پشتیبانی می کنند. در شکل 16 ، الگوریتمهای CSQ دارای مزیت آشکاری در ورودی/خروجی هستند، زیرا آنها بر روی ویژگیهای پویا تمرکز میکنند در حالی که ویژگیهای غیرمکانی فقط در بررسی تسلط در نظر گرفته میشوند. توجه داشته باشید که کارایی استراتژیهای هرس هندسی اندکی تحتتاثیر قرار گرفته است زیرا تسلط بر یک نقطه داده در ابعاد غیرمکانی بالاتر سختتر است و هرس نقاط دادهای بیشتر را تقریبا غیرممکن میکند.
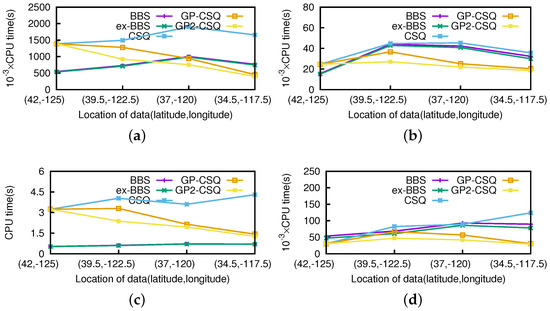
تاثیر موقعیت های شروع بدیهی است که اثربخشی استراتژی های هرس هندسی به مکان نقاط پرس و جو مربوط می شود. در این بخش، آزمایشهایی را انجام دادیم که یک شی در حال حرکت از شمال غربی به جنوب شرقی در کالیفرنیا را شبیهسازی میکردیم تا تأثیر موقعیتهای شروع مختلف را تأیید کنیم. به طور نمایندگی، موقعیت های شروع در (42 ∘∘N، -125 ∘∘W)، (39.5 ∘∘N، -122.5 ∘∘W)، (37 ∘∘N، -120 ∘∘W)، (34.5 ∘∘N، -117.5 ∘∘W)؛ سایر پارامترهای پرس و جو به همان روشی که در آزمایش های قبلی انجام شد، انتخاب شدند. ما عمدتاً با انتخاب چهار موقعیت نماینده بالا برای ارزیابی، تأثیر موقعیت مربوط به کارایی استراتژیهای هرس را بررسی کردیم. علاوه بر این، ما قصد داشتیم عملکرد کلی استراتژیهای هرس هندسی را به دست آوریم.
همانطور که در شکل 17 و شکل 18 نشان داده شده است، هزینه ها کاملاً متمایز هستند زیرا کارایی عملیات هرس به وضوح تحت تأثیر موقعیت های نقطه پرس و جو قرار می گیرد. عملیات هرس BBS سابق تقریباً غیرفعال شده بود زیرا یک خط افق دائمی دور از موقعیت پرس و جو وجود دارد. اگر نقطه پرس و جو به مرکز منطقه مکانی نزدیک شود، عملیات هرس BBS سابق به احتمال زیاد خراب می شود. استراتژیهای هرس هندسی معمولاً در دسترس هستند، مگر در شرایط شدید که در آن نقطه پرس و جو از لبه مکان مکانی شروع میشود. علاوه بر این، روشهای پیشنهادی GP-CSQ و GP2-CSQ میتوانند بسیاری از نقاط داده غیرمجاز را در برخی موارد خاص که در آن منطقهای که قرار است هرس شود گسترده است (مثلاً در موقعیت (34.5) فیلتر کند. ∘∘N، -117.5 ∘∘W)، باعث صرفه جویی در حدود 60٪ – 80٪ در زمان CPU و I/Oها می شود. توجه داشته باشید که در شکل 17 د، هزینه CPU الگوریتم CSQ بسیار بالاتر است زیرا تعداد زیادی رویداد وجود دارد که باید محاسبه شوند و GP-CSQ و GP2-CSQ به دلیل بهینه سازی استراتژی های هرس هندسی به BBS نزدیک می شوند. .
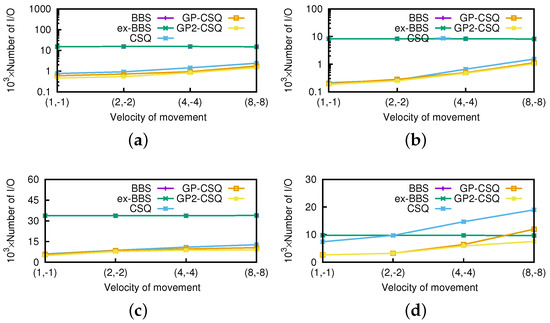
اثر سرعت حرکت در این بخش، آزمایش هایی را اجرا می کنیم که در آن سرعت نقطه پرس و جو از (1،-1) تا (8،-8) متغیر است. ما هنوز از مجموعه داده واقعی 100 K ترکیب شده با دو ویژگی غیرمکانی همبسته، مستقل، ضد همبستگی و zipf استفاده می کنیم.
در شکل 19 و شکل 20 ، بدیهی است که هزینه CSQ با سرعت پرس و جو افزایش می یابد، زیرا فاصله نقاط داده به طور مکرر تلاقی می کند، که به این معنی است که تعداد بیشتری از رویدادها رخ می دهد و نیاز به دفع دارند، بنابراین I/Oهای بیشتری مصرف می شود. و زمان CPU بهینهسازی شده توسط استراتژیهای هرس هندسی پیشنهادی، هزینه ورودی/خروجی GP-CSQ و GP2-CSQ خیلی حساس نیست. با این حال، زمانی که نقطه پرس و جو بسیار سریع حرکت می کند، زمان CPU برای ایجاد و مدیریت رویدادها هنوز خیلی زیاد است. میتوانیم ببینیم که الگوریتمهای CSQ، GP-CSQ، و GP2-CSQ در زمینه سرعت حرکت پایینتر مناسبتر هستند. اگر نقطه پرس و جو با سرعت بالا حرکت می کند، ترجیح می دهیم خط آسمان را از ابتدا محاسبه کنیم. به عنوان مثال، الگوریتم BBS را برای هر مرحله زمانی فراخوانی کنید.
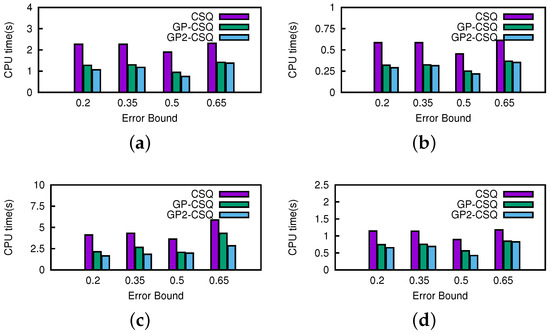
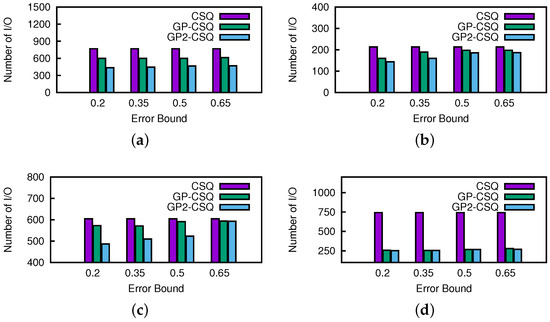
اثر کران خطا. در این بخش، تنظیمات آستانه را از 0.2 به 0.65 در حال اجرا در مجموعه داده شبکه جاده ای کالیفرنیا تغییر می دهیم. آستانه بالاتر به این معنی است که نقاط داده بیشتری می توانند زودتر در خط آسمان قرار بگیرند یا دیرتر از آن خارج شوند. در شکل 21 و شکل 22 ، با گسترده تر شدن آستانه ها، هزینه های CSQ اندکی افزایش می یابد زیرا نقاط بیشتری در خط افق باقی می مانند و رویدادهای بیشتری ایجاد می کنند. به طور کلی، تغییر آستانه تأثیر برجسته ای بر هزینه های روش های GP-CSQ و GP2-CSQ ایجاد نمی کند. به ویژه در شکل 22ج، عملیات هرس بار دوم با استفاده از Lemma 5 به وضوح توسط آستانه گستردهتر ضعیف شد، زیرا ناحیه موجود نقاط داده برای هرس بسیار کوچک شد و توزیع باعث شد که نقاط داده غیرمجاز را فیلتر نکند. هزینه CPU زمانی که آستانه برابر با 0.5 بود کمتر بود زیرا فرآیند محاسبه احتمال بررسی تسلط برای سرعت بخشیدن به پردازش ساده شده است.
ارزیابی کارایی چارچوب هرس هندسی. در این بخش، ما اثر چارچوب هرس هندسی را تحت انواع مختلف الگوهای حرکتی (مثلاً، محصور، با کرانهها و بدون کران) مقایسه میکنیم تا بررسی کنیم که آیا به اندازه کافی کارآمد و همهکاره است یا خیر. برای سادگی، بیضی ، سینوسی و سهمی را به عنوان نماینده سه الگوی حرکت ذکر شده در بالا در نظر می گیریم .
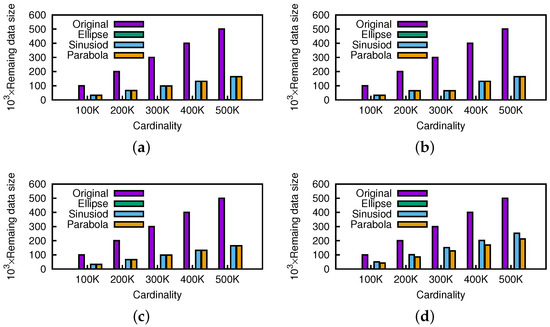
شکل 23 نشان می دهد که با افزایش کاردینالیته هر مجموعه داده، چارچوب هرس هندسی به طور موثر کار می کند. به طور خاص، برای بیضی ، اثر هرس بسیار قوی است زیرا ما میتوانیم بیشتر نقاط داده را با چند بار فراخوانی الگوریتم هرس هندسی برای یک الگوی حرکت محصور حذف کنیم. به طور خاص، برای بقیه الگوهای حرکت، حدود 60 درصد از نامزدهای اولیه حذف شدند، که هنوز هم می تواند زمان اجرای پرس و جو را به طور چشمگیری کاهش دهد.
شکل 24 تأثیر ابعاد غیر مکانی را نشان می دهد. استراتژی هرس پیشنهادی اندکی تحت تأثیر ابعاد غیرمکانی بالاتر است، زیرا هر نقطه داده به راحتی در ابعاد بالاتر تسلط نخواهد یافت، اما نتیجه نشان میدهد که هنوز ارزش اجرای عملیات هرس را دارد. توجه داشته باشید که اندازه دادههای باقیمانده از مجموعه دادههای ضد همبستگی به دلیل نتایج بیشتر در خط افق بزرگ هستند.
8. نتیجه گیری
در این مقاله، به پرس و جوهای خط افق پیوسته در نقاط پرس و جو متحرک تحت مدل حرکت افزایشی می پردازیم. از ویژگی های هندسی به طور کامل برای هرس کردن نقاط داده ای که به نتایج نهایی خط آسمان تعلق ندارند، استفاده می شود، بنابراین کارایی پردازش پرس و جو خط افق را بهبود می بخشد. علاوه بر این، مکانیسمهای مبتنی بر رویداد و یک خطمشی هرس مبتنی بر فهرست فایل شبکهای برای حفظ نتایج پیوسته خط آسمان به جای محاسبه نتایج خط افق از ابتدا پیشنهاد شدهاند. دو الگوریتم کارآمد (GP-CSQ و GP2-CSQ) بر اساس ویژگیهای هندسی پیشنهاد شدهاند، و آزمایشهای گسترده ما نشان دادهاند که دو الگوریتم مبتنی بر ویژگی هندسی مؤثرتر و کارآمدتر از روشهای موجود هستند.
مسیرهای آینده امیدوارکننده زیادی وجود دارد. اولاً، الگوهای حرکتی مناسب برای کاربردهای خاص را میتوان یافت، و میتوانیم نحوه تغییر استراتژیهای هرس را بر اساس ویژگیهای هندسی متناظر برای تطبیق الگوی حرکت جدید تحت چارچوب خود مطالعه کنیم. ثانیاً، از آنجایی که فرض میکنیم فقط نقاط پرس و جو و ویژگیهای نقطه پویا هستند، اگر پایگاههای اطلاعاتی تغییر کنند (یعنی نقاط داده متفاوت باشند-درج، بهروزرسانی یا حذف شوند)، میتوانیم نحوه توسعه الگوریتمهای کارآمد برای پاسخگویی به پرسوجوهای خط افق مداوم کاربر را مطالعه کنیم. ثالثاً، کار آینده را می توان به بررسی امکان استفاده از استراتژی های هرس هندسی پیشنهادی برای پشتیبانی از انواع دیگر پرس و جوهای خط افق، مانند پرس و جوهای خط آسمان رزرو [24]، مکعب های خط آسمان [ 29 ]، پرس و جوهای خط افق فضایی [29] اختصاص داد.16 ]، خطوط آسمان احتمالی [ 27 ] و غیره. در حالی که نتایج بهدستآمده از آزمایشهای جامع نشاندهنده برتری رویکردهای ما بر اساس استراتژیهای هرس هندسی نسبت به کارهای موجود است، ما معتقدیم که این ویژگیهای هندسی کاوششده و چارچوب پیشنهادی برای دیگر انواع پرسوجوی خط افق که در این مقاله بررسی نشدهاند، مفید هستند. مشکل جالب دیگر گسترش استراتژیهای هرس هندسی به سایر کاربردهای واقعی است (به عنوان مثال، سیستمهای توصیه [ 30 ]، شبکههای حسگر سیار [ 31 ، 32 ]، و سیستمهای نظارت [ 33]]) به این صورت که هر زمان که یک نقطه پرس و جو قرار گیرد، پس از انجام یک پرس و جو فوری، با استفاده از استراتژی های هرس هندسی پیشنهادی یا سایر گسترش ها، می توانیم بخش کوچکی از نامزدها را که ممکن است در آینده نزدیک بر نتیجه پرس و جو تأثیر بگذارند، بدون تأیید همه به دست آوریم. نقاط داده در سیستم به طوری که نتایج پرس و جو را می توان به طور موثر با توجه به مجموعه داده های نامزد در مقیاس کوچک حفظ کرد.













بدون نظر