

چکیده
ثابت شده است که دادههای جغرافیایی جمعسپاری منبع دادهای غنی و اصلی برای شبیهسازیها و تحلیلهای محیطی و همچنین تجسم پدیدههای فضایی است. با افزایش اندازه و پیچیدگی ساختمان های عمومی، مانند دانشگاه ها یا هتل ها، تقاضا برای اطلاعات در مورد فضاهای داخلی نیز افزایش می یابد. در تلاش برای تحریک این تقاضای فزاینده، هم محققان و هم جوامع داوطلبانه اطلاعات جغرافیایی (VGI) در نظر دارند جوامع مستقر را به داخل خانه گسترش دهند. قبلاً نشان داده شده است که VGI از OpenStreetMap (OSM) میتواند برای کاربردهای مختلف در زیرساختهای داده مکانی (SDIs) و همچنین برای محاسبات سادهترین کوتاهترین مسیر در داخل ساختمانها استفاده شود. تحقیق ارائه شده در اینجا اکنون سعی میکند از دادههای جغرافیایی داخلی جمعسپاری شده برای سناریوهای مسیریابی داخلی پیچیدهتر چند کاربر استفاده کند. اساساً بررسی خواهد شد که آیا و تا چه اندازه می توان از داده های موجود برای انجام شبیه سازی های تخلیه داخلی با چارچوب شبیه سازی استفاده کرد یا خیر.MATSim . یعنی، این مقاله مناسب بودن اطلاعات فضای داخلی جمعسپاری شده از OSM ( IndoorOSM ) را برای شبیهسازی تخلیه بررسی میکند. علاوه بر این، کاربرد MATSim برای شبیهسازی تخلیه داخلی مبتنی بر عامل انجام میشود. این مقاله دادههای مربوط به شبیهسازی تولید خودکار را مورد بحث قرار میدهد و نتایج تجربی را برای دو سناریو تخلیه مختلف ارائه میکند. علاوه بر این، محدودیتهای دادههای IndoorOSM و چارچوب MATSim برای شبیهسازی تخلیه داخلی توضیح داده شده و مورد بحث قرار گرفتهاند.
کلید واژه ها:
شبیه سازی مبتنی بر عامل ; مدیریت اضطراری ؛ شبیه سازی تخلیه ; تخلیه داخلی ؛ IndoorOSM ; MATSim ; OpenStreetMap (OSM) ; برنامه ریزی نجات
1. مقدمه
در دو سال گذشته پدیده دادههای جغرافیایی جمعسپاری شده (همچنین به عنوان اطلاعات جغرافیایی داوطلبانه، VGI شناخته میشود) به وجود آمد. بنابراین، داده های جغرافیایی به طور مشترک توسط کاربران (اعم از آماتور و حرفه ای) جمع آوری شده و در یک پلت فرم جامعه آنلاین به اشتراک گذاشته می شود. VGI شامل نوع خاصی از محتوای تولید شده توسط کاربر (UGC) است که به موجب آن جزء فضایی، به عنوان مثال ، موقعیت جغرافیایی یک ویژگی متمایز، بخشی جدایی ناپذیر از داده های جمع آوری شده است. قبلاً نشان داده شده است که VGI می تواند برای انواع مختلف برنامه ها و تحلیل ها، مانند مسیریابی وسایل نقلیه [ 1 ، 2 ]، مسیریابی اضطراری [ 3 ]، یا مطالعات شبیه سازی ترافیک [ 4 ، 5 ] استفاده شود.]. علاوه بر این، نشان داده شده است که VGI، به ویژه از OpenStreetMap (OSM)، می تواند (به طور بالقوه) به عنوان یک مجموعه داده اصلی [ 6 ، 7 ، 8 ] برای مناطق شهری خدمت کند.
با افزایش اندازه و پیچیدگی ساختار داخلی ساختمانهای عمومی، مؤسسات و تأسیسات، مانند دانشگاهها، هتلها یا فرودگاهها، تقاضای فزایندهای برای دادهها و بهویژه اطلاعات درباره محیطهای داخلی وجود دارد [ 9 ، 10 ]. در تلاش برای تحریک این تقاضا و علاوه بر این برای استفاده از شتاب هوش جمعی VGI، تلاش هایی برای گسترش OSM به فضاهای داخلی وجود دارد. برگرفته از تحقیق در مورد الزامات دادههای جغرافیایی داخلی جمعسپاری شده [ 11 ]، یک پیشنهاد نقشهبرداری دقیق IndoorOSM در دسترس است [ 12 ]. قبلاً نشان داده شده است که IndoorOSMحاوی اطلاعات بسیار دقیق در مورد محیط های داخلی است که می تواند برای تولید خودکار مدل های شهر سه بعدی استاندارد استفاده شود [ 13 ]. اساساً، این بدان معنی است که OSM را می توان به عنوان یک منبع داده غنی و قدرتمند (اضافی) برای زیرساخت های داده مکانی (SDI) ( ر.ک. [ 14 ])، و همچنین برنامه های کاربردی حرفه ای و تجزیه و تحلیل برای محیط های ساخته شده، مانند شبیه سازی های محیطی و مدیریت تسهیلات [ 15 ]، یا واکنش اضطراری و عملیات نجات [ 16 ]. علاوه بر این، قبلاً نشان داده شده است که دادههای جغرافیایی جمعسپاری شده را میتوان برای توسعه و ارائه خدمات مسیریابی داخلی با عملکرد محاسباتی کوتاهترین مسیر به صورت دو بعدی استفاده کرد [ 17 ،18 ] و برنامه های کاربردی کلاینت سه بعدی [ 19 ].
در محیطهای ساختهشده شهری و فضاهای داخلی آنها، بهویژه در ساعات شلوغی، افراد زیادی در یک ساختمان به طور همزمان حضور دارند. هنگامی که یک حادثه یا اضطراری رخ می دهد، مردم معمولا شروع به جستجو برای نزدیکترین خروجی خود می کنند، بنابراین ساختمان “ناامن” را ترک می کنند. با این حال، در چنین شرایط اضطراری، رفتار جمعی انسان نسبتاً بدون ساختار است، بنابراین تخلیه سریع و ایمن به روشی آسان قابل تحقق نیست. علاوه بر این، چنین موقعیتهایی اغلب منجر به وحشت (انبوه) و ازدحام جمعیت میشود که ممکن است با له شدن یا زیر پا گذاشتن افراد آسیب جدی به انسان وارد کند. برای جلوگیری از چنین آسیبهایی، شناسایی تنگناها یا کوچههای کور احتمالی در چیدمان ساختمان قبل از ساخت یک ساختمان جدید یا برنامهریزی یک رویداد در یک ساختمان موجود مهم است. نه تنها از دیدگاه طراحان و معماران، بلکه از دیدگاه قانونگذاران نیز. با این حال، “پیشبینی عملکرد تخلیه برای ساختمانهای بزرگ با طرحبندی پیچیده کار آسانی نیست . » [ 20 ]. از آنجایی که هزینههای (هم پولی و هم زمانی) شبیهسازیهای عملی را نمیتوان به راحتی پرداخت کرد، شبیهسازی تخلیه با رایانه در سالهای گذشته رایج شد [ 20 ]]. برخی از سناریوهای نمونه برای چنین شبیهسازیهایی عبارتند از: (1) پاکسازی محل برنامهریزیشده و ساختاریافته از یک بیمارستان به دلیل وقوع سیل پیشبینیشده، (2) پاکسازی سریع اما امن یک ساختمان به دلیل بحران گروگانگیری در یک طبقه ساختمان مشخص یا ( 3) تخلیه سریع و برنامه ریزی نشده به دلیل آتش سوزی. آشکار می شود که الزامات مختلفی برای تخلیه و همچنین سطوح استرس متفاوتی برای افراد فردی وجود دارد. با ترکیب پارامترها و الزامات مختلف، فرض می شود که پشتیبانی تصمیم برای عملیات نجات یا کاهش موقعیت های فاجعه ایجاد شود [ 21 ]]. با این حال، لازم به ذکر است که شبیه سازی تخلیه همیشه به مدل های شبیه سازی، عوامل و مفروضات بستگی دارد. یعنی شبیهسازیها در معرض عدم دقت هستند که باید در هنگام ارزیابی شبیهسازی در نظر گرفته شود.
برای بازیابی نتایج محتمل و معقول شبیه سازی، داده های دقیق و ریزدانه در مورد ساختمان آسیب دیده مورد نیاز است. با این حال، اغلب به دست آوردن و نگهداری داده های مناسب دشوار است. به عنوان مثال، اطلاعات در مورد چیدمان طبقات مختلف، راه پله ها و خروجی های احتمالی ساختمان باید از اشخاص ثالث مختلف، مانند معماران، مالکان ساختمان یا مقامات دولتی جمع آوری شود. با این حال، این «ارائهدهندگان داده» اغلب دادهها را در قالبهای مختلف (غیر استاندارد) ارائه میدهند، که معمولاً از تصاویر پیکسلی سطح پایین، نقشههای مبتنی بر برداری، تا طرحهای (3D) طراحی به کمک رایانه (CAD) را شامل میشود. علاوه بر این، مجموعه داده های مختلف معمولاً به طور صریح به یکدیگر ارجاع نمی شوند و نیاز به پیش پردازش گسترده است. متقابلا،
بنابراین، هدف اصلی این مقاله بررسی این موضوع است که آیا و تا چه اندازه میتوان از دادههای IndoorOSM برای شبیهسازی تخلیه استفاده کرد. بدین ترتیب، داده ها و اطلاعات موجود و همچنین امکان تولید خودکار چنین شبیه سازی ها مورد بحث قرار خواهد گرفت. اساساً، یک تولید شبیهسازی خودکار امکان استفاده سریع از رویکردهای ارائه شده در اینجا را برای سایر ساختمانهای جمعسپاری در IndoorOSM فراهم میکند . علاوه بر این، با انجام دو سناریوی شبیهسازی تخلیه، محدودیتها و دادههای از دست رفته IndoorOSM آشکار خواهد شد.
بقیه این مقاله به شرح زیر سازماندهی شده است: بخش 2 کار مرتبط را توصیف می کند، با تمرکز بر داده های جغرافیایی داخلی جمع آوری شده از OSM، و همچنین چارچوب های شبیه سازی مبتنی بر عامل موجود به طور کلی و چارچوب MATSim (که برای اثبات ارائه شده در اینجا استفاده شده است. مفهوم) به طور خاص. بخش 3 بر تولید (نیمه) خودکار تمام منابع داده شبیه سازی مرتبط تمرکز خواهد کرد. به عنوان اثبات مفهوم، بخش 4 نتایج تجربی دو سناریو تخلیه متفاوت را به تصویر میکشد. بخش 5 محدودیت ها و مشکلات داده های IndoorOSM و همچنین MATSim را مورد بحث قرار می دهدچارچوب بخش آخر به عنوان نتیجه گیری و چشم انداز کار آینده عمل می کند.
2. کارهای مرتبط
2.1. دادههای جغرافیایی جمعسپاری شده (داخلی) از OpenStreetMap
تلاش برای بهره مندی از هوش جمعی و استفاده از هزاران انسان که به عنوان حسگرهای راه دور عمل می کنند [ 22]، جوامع اینترنتی بیشتر و بیشتری به دنبال مجموعه ای از محتوای تولید شده توسط کاربر (UGC) نیستند، بلکه محتوای تولید شده توسط کاربر به صورت مکانی ارجاع داده می شوند. بدین ترتیب، داوطلبان به طور مشترک داده های جغرافیایی را در یک پلتفرم جامعه Web 2.0 جمع آوری، تولید، تقویت و به اشتراک می گذارند. برخلاف دادههای اختصاصی، دادههای موجود را میتوان برای اهداف فردی بدون پرداخت هزینه استفاده کرد. به این معنی که اعضای جامعه از مقدار زیادی از انواع مختلف داده های جغرافیایی بهره مند می شوند که می توانند برای برنامه های کاربردی خود از آنها استفاده کنند. یکی از محبوب ترین و متنوع ترین منابع برای VGI، OSM است. OSM در سال 2004 آغاز شد و با توجه به میزان مشارکت کنندگان و همچنین مقدار داده ها به سرعت رشد کرد. قبلاً ثابت شده است که دادههای OSM را میتوان برای انواع مختلف برنامهها و تحلیلها، مانند مسیریابی استفاده کرد [ 1 ، 2 ]]، مسیریابی اضطراری [ 3 ]، یا مطالعات شبیه سازی ترافیک [ 4 ، 5 ]. علاوه بر این، نشان داده شده است که (در مناطق شهری) OSM با داده های جغرافیایی جمع آوری شده تجاری قابل مقایسه است [ 6 ، 7 ، 8 ].
با توجه به ساختار داده، OSM نسبتاً ساده نگه داشته می شود: کاربران هندسه های دو بعدی را ارائه می دهند که علاوه بر این می توانند با اطلاعات اضافی (معنی) غنی شوند ( یعنی برچسب گذاری شوند ). به طور کلی، کاربر نقاط منفرد جغرافیایی مرجع ( یعنی گرهها ) را به اشتراک میگذارد ، که میتوان آنها را با روشهایی به اصطلاح برای نمایش خطوط ( یعنی یک راه غیر بسته ) یا چند ضلعی ( به عنوان مثال ، یک راه بسته ) ترکیب کرد. علاوه بر این، کاربران می توانند از روابط استفاده کنندبرای توصیف روابط پیچیده بین اشیاء، مانند محدودیت های چرخش یا سوراخ در یک چند ضلعی. برچسبگذاری از طریق روش باز جفت کلید-مقدار محقق میشود. یعنی مشارکت کنندگان یک کلید دلخواه اضافه می کنند که نشان دهنده نوعی اطلاعات یا کلاس اطلاعاتی است (مانند ساختمان ، بزرگراه و غیره ) و علاوه بر این، این اطلاعات را با مقداری (مثلاً فرودگاه ، مسکونی و غیره ) اصلاح می کنند. بنابراین، تعداد جفتهای کلید-مقدار، و همچنین خود کلیدها و مقادیر نامحدود هستند. یعنی یک کاربر اساساً می تواند هر نوع اطلاعاتی را ارائه دهد. با این حال، متداولترین تگهای مورد استفاده، یعنی ویژگیهای نقشه پذیرفتهشده در سطح جامعه، در صفحه ویکی ویژگیهای نقشه فهرست شدهاند.23 ]. در مقابل، Tagwatch [ 24 ] یک نمای کلی از تمام تگ های استفاده شده در حال حاضر، و همچنین برخی از مقادیر مربوطه را ارائه می دهد. علاوه بر این، OSM Wiki [ 25 ] توضیحات مفصل (تولید شده توسط کاربر) را برای اکثر جفت های کلید-مقدار ارائه می کند.
در تلاش برای بهره مندی از هوش جمعی و افشای امکانات جدید، مشارکت کنندگان مختلف OSM سعی می کنند از OSM برای جمع آوری اطلاعات داخلی استفاده کنند. با این حال، در حال حاضر هیچ استاندارد یا طرحی قابل قبول در سطح جامعه برای نقشه برداری اطلاعات داخلی وجود ندارد. تلاشهای متعددی در جامعه وجود دارد که هم از نظر جزئیات نقشهبرداری و هم در مستندسازی متفاوت است [ 26 ]. برای نویسندگان، یکی از پیشرفتهترین پیشنهادات، طرح نقشهبرداری IndoorOSM نامیده میشود ، زیرا اطلاعات دقیقی در مورد ساختار داخلی یک ساختمان ارائه میدهد. علاوه بر این، IndoorOSM تنها پیشنهادی است که از تحقیق در مورد خواستهها و الزامات اطلاعات داخلی جمعآوری شده مشترک نشات گرفته است [ 11 ]]. قبلاً نشان داده شده است که IndoorOSM حاوی دادههای بسیار دقیقی است که برای تولید مدلهای ساختمانی استاندارد 3D CityGML [ 13 ] برای کاربرد در SDI مناسب است. علاوه بر این، استفاده از IndoorOSM برای توسعه خدمات مسیریابی داخلی با محاسبات اولیه کوتاهترین مسیر قبلاً با یک کلاینت دو بعدی برای رایانههای رومیزی [ 18 ] و دستگاههای تلفن همراه [ 17 ] و همچنین یک برنامه برنامهریزی مسیر سه بعدی واقعی نشان داده شده است. 19 ]. با این حال، IndoorOSMداده ها هنوز برای اجرای برنامه های پیچیده تر و پیشرفته تر مسیرهای داخلی با چندین کاربر استفاده نشده است. اساسا، IndoorOSM هنوز به عنوان منبع داده برای شبیه سازی تخلیه داخلی استفاده نشده است. با این وجود، از آنجایی که IndoorOSM تنها حاوی دادههایی در مورد شکل اتاقها نیست، بلکه اطلاعات دقیقی در مورد مکان و ویژگیهای درها و پنجرهها – که برای موقعیتهای اضطراری مهم است – دارد، دادههای موجود IndoorOSM (به طور بالقوه) برای شبیهسازی تخلیه داخلی مناسب است. .
برای نگاشت اطلاعات داخلی در OSM، IndoorOSM از انواع داده های OSM موجود ( به عنوان مثال ، گره ها ، راه ها ، روابط ، برچسب ها ) استفاده می کند. یک ساختمان به عنوان یک شی با ساختار سلسله مراتبی، متشکل از چندین طبقه ساختمان ( به عنوان مثال ، سطوح ) نشان داده می شود. علاوه بر این، هر طبقه شامل مقدار مشخصی از قطعات ساختمانی (بخش ساختمان )، مانند اتاق ها، راهروها، راه پله ها و غیره است.یعنی ساختمان کامل به عنوان یک رابطه در OSM (رابطه اصلی) نشان داده می شود. اعضای مختلف رابطه این رابطه اصلی، طبقات مختلف را نشان می دهند، که به موجب آن هر یک از آنها دوباره به عنوان یک رابطه OSM نشان داده می شود. سپس هر بخش جداگانه از طبقه مربوطه به عنوان یک عنصر OSM (معمولاً راهی بسته برای نمایش هندسه بخش ساختمان) ترسیم می شود.
اطلاعات اضافی (معنی) مانند نام اتاق، شماره سطوح، ارتفاع و غیره را می توان با جفت های کلید-مقدار به ویژگی های OSM مربوطه اضافه کرد. اطلاعات در مورد درها یا پنجره ها (که برای اهداف تخلیه بسیار مهم هستند) را می توان با افزودن یک گره به قسمت ساختمان مربوطه و برچسب گذاری آن به عنوان پنجره یا در ترسیم کرد. علاوه بر این، اطلاعات مربوط به عرض یا ارتفاع یک در/پنجره را می توان به ترتیب برچسب گذاری کرد. ایده سلسله مراتبی اولیه IndoorOSM نیز در شکل 1 (الف) نشان داده شده است. ترکیب یک پلان طبقه دقیق برای یک سطح ساختمان نمونه با اتاق ها، راهروها، درها و پنجره ها علاوه بر این در شکل 1 نشان داده شده است.(ب). برای اطلاعات بیشتر در مورد پیشنهاد نقشه برداری IndoorOSM ، لطفاً به انتشارات تحقیقاتی زیربنایی [ 11 ] و همچنین به صفحه ویکی OSM مربوطه [ 12 ] مراجعه کنید.
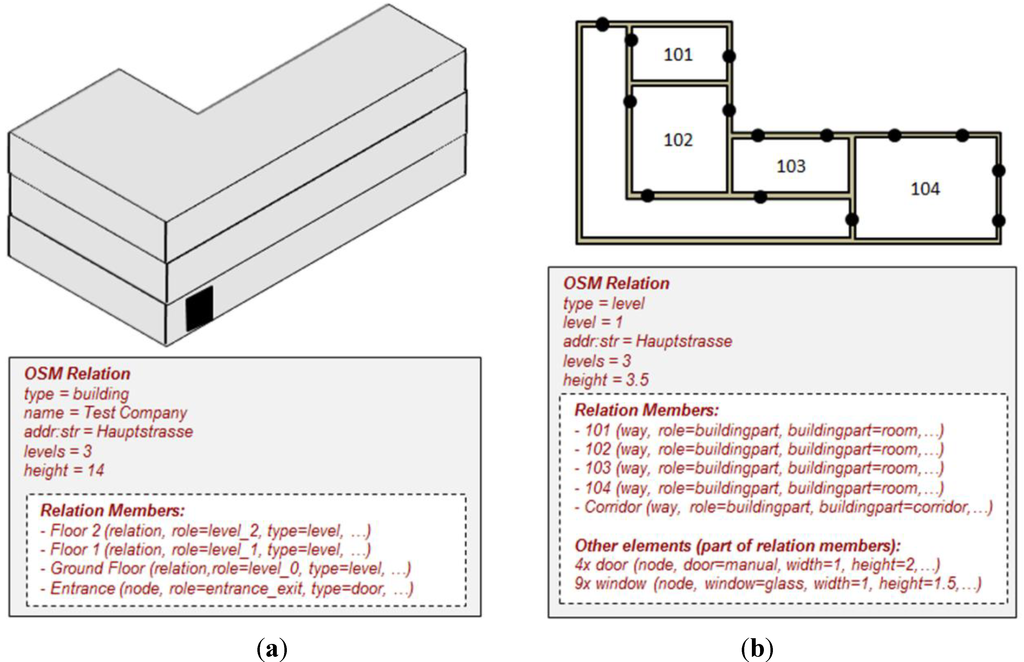
شکل 1. سلسله مراتب اساسی یک ساختمان کامل ( a ) و یک نقشه طبقه تفصیلی نمونه با اتاق ها، راهروها، درها و پنجره ها ( b ) در IndoorOSM .
2.2. شبیه سازی تخلیه داخلی مبتنی بر عامل
چندین وضعیت اضطراری فاجعه بار در گذشته، مانند حملات تروریستی 11 سپتامبر یا زلزله در ژاپن در سال 2011، انگیزه بحث ها و تلاش های تحقیقاتی در مورد چگونگی محافظت و تخلیه افراد در داخل ساختمان در هنگام شرایط اضطراری [ 27 ] بود. علاوه بر این، تلاشهای تحقیقاتی بسیار زیادی در مورد شبیهسازیهای تخلیه داخلی (و بیرونی) وجود دارد. شبیه سازی مبتنی بر عامل از شناخت فضایی و همچنین راهیابی در ساختمان ها برای سناریوی اضطراری آتش سوزی توسط حاجی بابایی و همکاران مورد بحث قرار گرفته است . [ 28 ]. کاملاً مشابه، یک مدل تخلیه مبتنی بر عامل برای ساختمانهای عمومی بزرگ تحت شرایط آتش سوزی پویا نیز موجود است [ 20 ]]. یک رویکرد ترکیبی که ترکیبی از هر دو شبیه سازی شبکه و همچنین مدل فضای آزاد است ارائه شده است [ 21 ]. یک سیستم دستیار مبتنی بر شبکه های داخلی توسط Yamashita و همکارانش توضیح داده شده است . [ 29 ]. با توجه به سناریوهای بزرگ، همچنین نشان داده شده است که شبیه سازی مبتنی بر عامل برای شبیه سازی تخلیه در فضای باز در هنگ کنگ [ 30 ] مناسب است. علاوه بر اینها، بسیاری از مدلهای تخلیه دیگر مانند EGRESS، EXODUS، SIMULEX، EXITT، WAYOUT [ 31 ] وجود دارد.]، موجود است که همگی بر اساس یک نمایش شبکه هستند. در اصل، آنها برای شبیه سازی تخلیه و همچنین تجزیه و تحلیل کارایی تخلیه برای ساختمان های دلخواه مناسب هستند. مروری جامع درباره شبیهسازی تخلیه عابر پیاده را میتوان در سری کتابهای عابر پیاده و دینامیک تخلیه [ 32 ، 33 ، 34 ، 35 ، 36 ، 37 ] یافت.
بدیهی است که تلاشهای زیادی برای شبیهسازی تخلیه داخلی مبتنی بر عامل وجود دارد. با این حال، رویکردهای فعلی همه از داده های اختصاصی استفاده می کنند. اساساً، هیچ یک از رویکردهای موجود از دادههای جغرافیایی داخلی جمعسپاری شده استفاده نمیکند. با این حال، دادههای جغرافیایی داخلی جمعسپاری شده از OSM این مزیت را دارد که یک مجموعه داده بینالمللی در حال رشد غیر اختصاصی است. یعنی برنامه ها و رویکردهای توسعه یافته را می توان برای هر ساختمان دلخواه که در OSM موجود است استفاده کرد. بنابراین، در ادامه این مقاله، احتمالات برای ارائه کارآمد و خودکار شبیهسازی تخلیه داخلی برای ساختمانهای دلخواه بر اساس دادههای جغرافیایی داخلی جمعسپاری بررسی و مورد بحث قرار خواهد گرفت.
2.3. شبیه سازی حمل و نقل چند عاملی (MATSim)
همانطور که در بخش قبل توضیح داده شد، چارچوب های شبیه سازی بسیار زیادی وجود دارد – همه با مزایا (مانند یادگیری تکراری، در نظر گرفتن عوامل مختلف، توسعه پذیری مدولار و غیره ) و معایب (به عنوان مثال، نادیده گرفتن بعد سوم، محدود به شبیه سازی وسیله نقلیه و غیره ). . ). با این حال، هنگام مقایسه یک چارچوب با استفاده از آرایههای احتمال چند بعدی بزرگ، صرفهجویی محاسباتی به نفع چارچوب باید ظاهر شود. علاوه بر این، طیف وسیعی از گزینه های خروجی و همچنین تکنیک های مدل سازی صریح برای فرآیندهای تصمیم گیری افراد مطلوب است [ 38 ]]. به خصوص نکته آخر بسیار ضروری است، زیرا سناریوهای تخلیه به شدت به تصمیمات افراد بستگی دارد. برای تحقیق انجام شده در اینجا تصمیم گرفته شده است که از چارچوب شبیه سازی حمل و نقل چند عاملی ( MATSim ) استفاده شود، زیرا تمام الزامات ذکر شده را برآورده می کند [ 14 ]. MATSim دارای یک میکرو شبیهسازی چند عامله است که توضیح میدهد که رفتار هر شخص شبیهسازی شده ( به عنوان مثال ، یک نماینده) را میتوان با پارامترهای فردی مانند سن، حرفه، برنامه سفر و غیره تعریف کرد . ویژگیهای کلیدی MATSimیک شبیهسازی ترافیک مبتنی بر عامل سریع، پشتیبانی از سناریوهای چند سطحی بزرگ، بصریساز تعاملی پیچیده، تحلیلهای همهکاره، رویکرد مدولار، و توسعه منبع باز فعال [ 39 ] است.
MATSim در جاوا توسعه یافته است، بنابراین در بسیاری از پلت فرم های عملیاتی قابل استفاده است. همه فایل های ورودی مورد نیاز، مانند شبکه، جمعیت یا منطقه تخلیه (در ادامه توضیح داده خواهد شد)، بر اساس طرحواره های XML هستند. MATSim قبلاً برای انواع مختلف شبیهسازی (تخلیه) استفاده شده است، از شبیهسازی ترافیک وسایل نقلیه در مقیاس بزرگ [ 40 ]، سناریوهای تخلیه شهر [ 41 ، 42 ، 43 ] تا تخلیه عابران پیاده [ 44 ]. با این حال، تا حد دانش نویسندگان، MATSim هنوز برای شبیهسازی تخلیه جمعی در یک ساختمان چند سطحی استفاده نشده است. ثابت شده است که MATSimشبیهسازیها نتایج واقعیتری را بهویژه از دیدگاه زمانی نسبت به سایر چارچوبهای شبیهسازی تولید میکنند [ 45 ]. بر اساس یک مدل صف موازی با محدودیت ظرفیت و محدودیت ذخیره سازی [ 46 ] است. محدودیت قبلی از خروج عوامل بیشتر در شبکه در مدت زمان معینی نسبت به ظرفیت جریان این پیوند جلوگیری می کند. محدودیت اخیر توضیح می دهد که یک پیوند فقط می تواند حاوی مقدار معینی از عوامل در یک نقطه از زمان باشد. به این معنا که به محض پر شدن یک لینک، یک صف برگشتی رخ می دهد و تعداد عوامل ورودی کاهش می یابد [ 46 ]. اطلاعات بیشتر در مورد MATSim در صفحه وب پروژه مربوطه موجود است [ 39 ].
برای نتیجه گیری می توان گفت که MATSim بهترین انتخاب برای هدف تحقیق در اینجا به نظر می رسد. از یک طرف، قبلاً نشان داده شده است که MATSim را می توان با داده های OSM استفاده کرد [ 5 ] و از طرف دیگر امکانات زیادی را برای تطبیق شبیه سازی ها با نیازهای فردی فراهم می کند. بنابراین، MATSim به عنوان چارچوب شبیه سازی تخلیه برای تحقیق انجام شده در اینجا انتخاب شده است. یعنی پس از معرفی IndoorOSM در بخش فرعی بعدی، بقیه این مقاله در مورد احتمالات استفاده از دادههای جغرافیایی داخلی جمعسپاری شده از OSM برای شبیهسازی تخلیه داخلی با MATSim بحث خواهد کرد .
3. شبیه سازی تخلیه با IndoorOSM
این بخش بر روی امکانات استقرار خودکار شبیهسازیهای تخلیه داخلی با دادههای IndoorOSM تمرکز دارد. به طور خاص، مورد بحث قرار خواهد گرفت که چه نوع اطلاعات مربوط به تخلیه موجود است و چگونه می توان از آن برای شبیه سازی استفاده کرد. همانطور که در بخش قبل توضیح داده شد، چارچوب MATSim برای تحقیق انجام شده در اینجا انتخاب شده است. علاوه بر این، فایل های ورودی و پارامترهای مختلف مورد نیاز و همچنین فرضیات لازم شرح داده شده است.
3.1. تولید شبکه
هنگام محاسبه (کوتاهترین) مسیرها در داخل ساختمانها، محیط داخلی معمولاً با یک نمودار مسیریابی نشان داده میشود که قادر به اعمال کوتاهترین الگوریتم مسیر (به عنوان مثال، Dijkstra [ 47 ] یا Hart [ 48 ]) برای آن است. بنابراین، گرهها در نمودار معمولاً نقاط تصمیم را نشان میدهند و پیوندها نشاندهنده ارتباط بین نقاط تصمیمگیری مختلف هستند. در محیط های بیرونی، یک نقطه تصمیم معمولاً شامل یک تقاطع خیابان است. با این حال، از آنجایی که کار در این مقاله بر شبیهسازی ترافیک داخلی متمرکز است، یک نقطه تصمیم نشاندهنده انتقالهای داخلی، مانند درها یا نقاط عطف میانی در یک راهرو است. در اصل، مدلهای نمودار متفاوتی در دسترس هستند، مانند [ 49 ، 50 ، 51 ،52 ]، که عمدتاً از نظر جزئیات و فرمالیسم متفاوت هستند. نشان داده شده است که برخی از آنها را می توان به طور خودکار از منابع داده رسمی استخراج کرد، اما استخراج چنین نمودارهایی از VGI هنوز مورد بحث قرار نگرفته است. در مقابل، به اصطلاح نمودار مسیریابی داخلی وزنی (WIRG) [ 53 ] – که نشان دهنده یک مدل نموداری به طور رسمی تعریف شده و استدلال شده برای مسیریابی بهینه داخلی است – می تواند به طور خودکار صرفاً با استفاده از داده های جغرافیایی داخلی جمع آوری شده از IndoorOSM [ 19 ] تولید شود. به این معنا که امکان تولید یک گراف مسیریابی داخلی از IndoorOSM وجود دارد. با این حال، هنوز باید ثابت شود که IndoorOSMداده ها همچنین برای تولید یک نمودار مناسب هستند که می تواند برای شبیه سازی های پیچیده تخلیه داخلی استفاده شود. به ویژه، چنین نموداری نه تنها باید حاوی اطلاعاتی در مورد درها و اتاق ها، بلکه در مورد پنجره ها نیز باشد، زیرا آنها برای اهداف تخلیه مهم هستند. با این حال، انتخاب پنجرههای قابل تأمل همیشه کار آسانی نیست، زیرا ممکن است نیاز به دانش محلی در مورد ساختار ساختمان و همچنین زمین اطراف داشته باشد، تا مشخص شود کدام پنجرهها میتوانند به عنوان خروجی اضطراری عمل کنند و کدامیک نه. این مشکل همچنین در بخش 5.1 مورد بحث قرار خواهد گرفت .
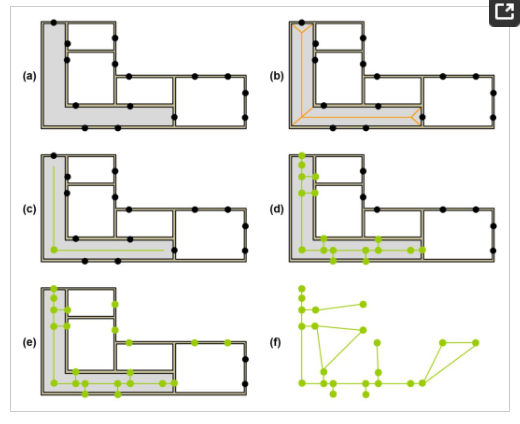
شکل 2 (a-f) اصل کلی تولید یک نمودار مسیریابی داخلی با جزئیات را گام به گام به تصویر می کشد. بدین ترتیب نه تنها درها در نظر گرفته شده و در نمودار ادغام می شوند، بلکه پنجره های مختلف اتاق ها نیز در نظر گرفته شده اند. تمام اطلاعات مورد نیاز در IndoorOSM موجود است و نمودار را می توان به طور خودکار با استفاده از این داده ها تولید کرد.

شکل 2. تولید گام به گام نمودار مسیریابی داخلی (طبق تعریف نمودار مسیریابی داخلی وزنی (WIRG) [ 53 ]) با مجموعه ای از پنجره های قابل تامل برای شبیه سازی تخلیه اضطراری.
به عنوان یک وضعیت اولیه ( شکل 2 (الف))، تمام ردپاهای بخش ساختمان، به عنوان مثال ، اشکال چند ضلعی همه اتاق ها یا راهروهای یک طبقه ساختمان مجزا، بر اساس پیشنهاد نقشه برداری IndoorOSM ( به بخش 2.1 رجوع کنید) نگاشت می شوند. برای هر راهرو (آنهایی که به صراحت در IndoorOSM با عنوان buildingpart=راهرو برچسب گذاری شده اند ) خط مرکزی با تولید اسکلت [ 54 ] چند ضلعی راهروی زیرین محاسبه می شود (خط نارنجی در شکل 2).(ب)) و هرس کردن تمام خطوط اسکلت که به طرح کلی راهرو مربوطه متصل است. باقیمانده خط مرکزی راهرو را تشکیل می دهد (خط سبز و گره ها در شکل 2 (c)) که از یک طرف نشان دهنده هندسه راهرو بسیار دقیق است و از طرف دیگر نشان دهنده رفتار انسان در هنگام راه رفتن است. یک راهرو [ 53 ]. پس از آن، تمام درها ( درب کلید OSM ) که مربوط به راهرو هستند (آنهایی که بخشی از هندسه راهرو هستند یا بخشی از یک ساختمان مجاور هستند) به نمودار مسیریابی اضافه می شوند و به صورت عمودی به راهرو مربوطه متصل می شوند ( شکل 2 (d) )). پس از آن، پنجره های قابل تأمل، یعنیمواردی که برای تخلیه اضطراری مناسب هستند ( به بحث در بخش 5.1 نیز مراجعه کنید ) به عنوان گره ها به نمودار اضافه می شوند. در نهایت – همانطور که در تعریف WIRG [ 53 ] بیان شد – همه گره ها ( به عنوان مثال ، درها و پنجره ها) یک اتاق تک به صورت جفتی از طریق یک لبه در نمودار به یکدیگر متصل می شوند و منجر به نمودار مسیریابی نهایی می شود ( شکل 2 (f) ). برای ساختمان های چند سطحی، مراحل (الف) تا (و) به همان نسبت برای هر طبقه ساختمان تکرار می شود. علاوه بر این، اتصالات عمودی، مانند راه پله ها یا پله برقی ها، با ارزیابی داده های موجود IndoorOSM (به عنوان مثال، کلیدهای buildingpart=vertical passage ، connector:ids و غیره ) شامل می شوند. ، رجوع کنید به بخش 2.1 ).
در MATSim ، شبکه داخل ساختمان با یک گراف جهت دار نشان داده می شود، یعنی نمودار شامل دو پیوند جهت دار است تا یک پیوند غیر جهت دار. گره ها از طریق یک شناسه منحصر به فرد، و همچنین مختصات دو بعدی ( یعنی x و y) از دیدگاه پرنده نشان داده می شوند. ارتفاع ( به عنوان مثال ، مقدار z) به صراحت مورد نیاز نیست. پیوندهای مختلف از طریق یک شناسه منحصربهفرد، اطلاعات مربوط به شروع ( از ) و پایان ( به )، طول پیوند، سرعت آزاد ( یعنی حداکثر سرعت سفر) و ظرفیت ( به عنوان مثال ) نشان داده میشوند.، ظرفیت جریان بر حسب اینکه چه تعداد عامل می توانند این پیوند را در یک زمان معین عبور دهند). علاوه بر این، همه پیوندها حاوی اطلاعاتی در مورد میزان خطوط دائمی ( permlanes ) هستند. با توجه به شبیه سازی در فضای باز، این پارامتر اساساً برای توصیف تعداد خطوط خودرو برای یک جاده مجزا استفاده می شود. با در نظر گرفتن فضاهای داخلی (و به ویژه راهروها)، این پارامتر نشان دهنده تعداد عواملی است که می توانند در یک فضای معین (مثلاً راهرو) در کنار یکدیگر قرار گیرند. Weidmann [ 55 ] میانگین عرض عامل را 0.71 متر تعریف کرد، بنابراین برای مثال یک راهرو با عرض 2.13 متر به عنوان پیوندی با سه خط دائمی نمایش داده می شود. در مشخصات MATSim ، مقدار permlanesدو برابر است، بنابراین مقادیری مانند permlanes=1.46 نیز امکان پذیر است. نکته مهم این است که مقدار ظرفیت با مقدار پارامتر capperiod مرتبط است. این پارامتر به صورت سراسری برای کل سناریوی شبیه سازی تعریف شده است و دوره زمانی را که مقادیر مختلف ظرفیت برای آن معتبر هستند، توصیف می کند. یعنی وقتی capperiod روی 00:01:00 ( یعنی یک ساعت) تنظیم می شود، مقدار ظرفیت به عنوان ظرفیت جریان برای یک ساعت تفسیر می شود. همانطور که قبلاً در بخش 2.2 ، MATSim توضیح داده شدیک مدل صف مبتنی بر سلول را اعمال می کند. بنابراین، اندازه سلول باید به صورت سراسری برای شبیه سازی از طریق دو پارامتر effectcellsize و effectlanwidth تعریف شود. برای شبیه سازی عابر پیاده، مقادیر معقول 0.26 متر و 0.71 متر است [ 55 ]. با این حال، به دلیل تعریف ایستا از این مقادیر، این امر باعث عدم دقت می شود. این موضوع در بخش 5.2 بیشتر مورد بحث قرار خواهد گرفت .
طول پیوندها فاصله بین دو گره درگیر بر حسب متر است که با محاسبه فاصله اقلیدسی بین دو گره به راحتی می توان آن را پر کرد . پارامتر سرعت آزاد ، مرز بالایی را برای حداکثر سرعت حرکت یک عامل، در نتیجه سرعت حرکت یک عامل در یک فضای آزاد، تعیین می کند. تلاشها و تحقیقات متفاوتی در مورد سرعت سفر عابران پیاده در فضاهای داخلی وجود دارد که معمولاً به خود عوامل و همچنین سناریوی مورد بررسی نیز بستگی دارد. ویدمن [ 55] 52 تحقیق مختلف را در مورد سرعت حرکت عابران پیاده ارزیابی کرد. او محدوده ای بین 0.97 متر بر ثانیه و 1.65 متر بر ثانیه را کشف کرد که به موجب آن بیشتر مقادیر بین 1.25 و 1.45 متر بر ثانیه هستند. میانگین کلی سرعت سفر برای عابران پیاده را می توان 1.34 متر بر ثانیه [ 55 ] فرض کرد. بسته به موقعیت فردی عامل، این مقادیر می تواند متفاوت باشد، بنابراین برای مثال یک فرد 70 ساله احتمالاً به 72 درصد از این سرعت متوسط دست می یابد [ 55 ]. با توجه به حرکات روی پله ها، عابران پیاده تقریباً 50 درصد کندتر هستند [ 55 ]. مقدار خطوط دائمی نیز باید برای هر لینک ارائه شود. بنابراین، میانگین عرض عامل 0.71 متر [ 55] قابل استفاده است. برای یک جمعیت خودکار با این مقدار، اساساً سه رویکرد ممکن وجود دارد، همانطور که در معادلات زیر توضیح داده شده است. بنابراین، عرض متغیر فهرستی از تمام عرض های راهرو را به ترتیب افزایش و طول نشان دهنده طول راهرو است.



معادله (1) فقط حداقل عرض را در بر می گیرد، بنابراین بدبینانه ترین پارامتر را نشان می دهد (بدترین حالت). در مقابل، معادله محاسباتی (3) خوش بینانه ترین رویکرد (بهترین حالت) است. معمولاً از بدترین و بهترین حالت برای نشان دادن پهنای باند عملکرد تخلیه مورد انتظار به تصمیم گیرندگان استفاده می شود. ظرفیت فردی یک لینک را می توان با در نظر گرفتن میانگین عرض عامل، سرعت حرکت و عرض راهرو تعریف کرد.
از آنجایی که درها در محیطهای داخلی ظرفیت جریان جرم را کاهش میدهند (مردم کمتری میتوانند به طور همزمان از یک در با عرض یک متر عبور کنند تا یک دروازه با عرض سه متر)، گنجاندن اندازه یک در یا پنجره (به ویژه عرض آن) مهم است. این اطلاعات به صراحت در OSM با عرض کلید (و همچنین ارتفاع یا سینه ) ترسیم شده است و بنابراین می توان از آنها هنگام تولید نمودارهای مسیریابی استفاده کرد. همانطور که در بخش 2.1 توضیح داده شد ، در IndoorOSM یک در یا پنجره به یکی از دو هندسه بخش ساختمان درگیر اضافه می شود ( شکل 3)(آ)). بنابراین، گره منفرد (در یا پنجره) باید به هندسه درگیر دیگر نمایش داده شود و در نتیجه یک گره اضافی در نمودار ایجاد شود ( شکل 3 (ب)). سپس این دو گره از طریق یک لبه (بسیار کوتاه) به هم متصل میشوند که به موجب آن از عرض برای محاسبه پارامترهای مختلف پیوند مانند خطوط دائمی یا ظرفیت استفاده میشود .

شکل 3. یک گره OSM (دایره سیاه) که نشان دهنده دری بین اتاق های ( a ) و گره اضافی (پیشتاب شده به چند ضلعی مجاور) با یک لبه اضافی که آنها را به هم متصل می کند ( b ) است.
3.2. ایجاد جمعیت مصنوعی
MATSim به اطلاعاتی در مورد عوامل مختلف نیاز دارد. این اطلاعات جمعیت نامیده می شود و در فایل جمعیت .xml توضیح داده شده است. اساساً یک جمعیت از تعداد (غیر محدود) افراد تشکیل شده است. هر عنصر شخص شامل یک شناسه منحصر به فرد (اجباری) و همچنین برخی از پارامترهای دیگر (اختیاری) مانند جنسیت یا سن نماینده است . علاوه بر این، هر فرد یک برنامه دارد، بنابراین دنباله ای از حداقل یک فعالیت برنامه ریزی شده ( عمل ). بنابراین، یک فعالیت مکان فیزیکی را نشان می دهد (تعریف شده از طریق شناسه پیوند شبکه) از عامل مربوطه برای مدتی یا بازه زمانی مشخص. حرکت یک عامل در شبکه در طول زمان را می توان با افزودن چندین فعالیت به یک عامل نشان داد.
در حال حاضر، IndoorOSM اطلاعات جمعیت را برای فضاهای داخلی در نظر نمی گیرد. این موضوع در بخش 5.1 بیشتر مورد بحث قرار خواهد گرفت . به این معنا که هنگام انجام شبیهسازی تخلیه داخلی، اساساً دو امکان وجود دارد: (1) ایجاد دستی جمعیت با ارقام واقعی یا (2) ایجاد خودکار با توزیع تصادفی عوامل در اتاقهای مختلف (احتمالاً مبتنی بر آن). در تخمین ها با توجه به اندازه اتاق یا عملکرد). بسته به میزان عوامل و سناریوی متمایز، هر دو احتمال مزایا و معایب خود را دارند. با این حال، نتایج واقعی تری را می توان با ارقام دنیای واقعی اضافه شده دستی (در صورت وجود) به دست آورد.
3.3. تعریف منطقه تخلیه
اساساً دو فایل ورودی ذکر شده از قبل برای شبیه سازی ترافیک MATSim کافی است. با این حال، از آنجایی که هدف این مقاله انجام شبیهسازی تخلیه است، یک فایل ورودی سوم مورد نیاز است: فایل evacuationarea.xml . هدف این فایل ورودی (همانطور که نام ممکن است نشان دهد) این است که مشخص کند کدام ناحیه از سناریو (شبکه) باید تخلیه شود. به عبارت دیگر، فایل evacuationarea.xml توضیح می دهد که کدام بخش از شبکه ایمن است و کدام قسمت در معرض خطر (توسط برخی تهدیدات) است. ساختار فایل خود نسبتاً ساده است، زیرا فقط شامل شناسه پیوندهای در معرض خطر در شبکه است. علاوه بر این، می توان برای تک تک لینک ها یک مهلت تعریف کرد، یعنی، نقطه زمانی که در آن پیوند حداکثر در دسترس است.
اساسا، این فایل را می توان به راحتی به طور خودکار از داده های IndoorOSM تولید کرد . به طور معمول، تخلیه داخلی با هدف تخلیه همه ساکنان به خارج از ساختمان است. یعنی منطقه تخلیه شامل تمام پیوندهای شبکه است که در داخل ساختمان قرار دارند. همه پیوندهای دیگر ( به عنوان مثال ، ویژگی های بیرونی OSM) بخشی از منطقه تخلیه نیستند (حداقل برای شبیه سازی تخلیه اولیه داخلی). برای ادغام نوعی منطقه ایمنی در اطراف ساختمان (مثلاً در سناریوی آتش سوزی)، همچنین می توان تمام ویژگی ها (اصلاً خیابان ها یا مسیرها) را به منطقه تخلیه اضافه کرد که در فاصله مشخصی از اطراف ساختمان قرار دارند.
4. نمایش و نتایج تجربی
به عنوان یک نمایش و اثبات مفهوم، دو شبیه سازی تخلیه نمونه انجام شده است. با انجام این کار، چندین محدودیت از داده های IndoorOSM و چارچوب MATSim آشکار شد. آنها در بخش 5 مورد بحث قرار خواهند گرفت . دو سناریو شبیه سازی به شرح زیر است: (1) پاکسازی سایت برنامه ریزی شده، به عنوان مثال، یک تخلیه ساختاریافته، سازمان یافته و ایمن همانطور که برای مثال در مورد یک سیل پیش بینی شده مورد نیاز است، و (2) شبیه سازی تخلیه پیش بینی نشده برای یک حادثه فاجعه بار ناگهانی. تفاوت اصلی بین این دو سناریو این است که در سناریوی اول همه افراد با خیال راحت از خروجی های اصلی ساختمان تخلیه می شوند. در مقابل، در سناریوی اخیر همه خروجی های ممکن (اضطراری) در نظر گرفته می شود. اساساً، همچنین پنجرهها، دربهای گاراژ و غیره ، میتوانند به عنوان یک خروجی برای جمعیت آسیبدیده در سناریوی 2 عمل کنند. برای اهداف سادهسازی، در هر دو سناریو سرعت متوسط 1.0 متر بر ثانیه تعریف شده است. به نظر می رسد که این یک مقدار متوسط کافی (ساده شده) است که شرایط عامل مختلف، حرکات مختلف ( یعنی صفحه در مقابل.پله ها) و سطوح مختلف استرس. برای ساده سازی، تمایزی بین انواع مختلف عوامل انجام نشده است. به این معنا که همه عوامل سرعت متوسط سفر و همچنین جنس یا سن یکسانی دارند. به عنوان سادهسازی دیگر، در هر دو سناریو فرض میشود که همه عاملها حرکت خود را فوراً در یک زمان آغاز میکنند. به طور خاص، هیچ زمان واکنش فردی در نظر گرفته نشده است. در واقع این رفتار نسبتاً بعید است، زیرا افراد زمانهای واکنش و همچنین رفتار متفاوتی دارند، به عنوان مثال، برخی فوراً از ساختمان فرار میکنند، برخی دیگر وسایل خود را دریافت میکنند و سپس ساختمان را ترک میکنند و احتمالاً برخی حتی متوجه هشدار اضطراری نمیشوند. لازم به ذکر است که تمامی این ساده سازی ها به دلیل تمرکز این مقاله انجام شده است.IndoorOSM برای شبیهسازی تخلیه، به جای انجام شبیهسازیهای بسیار واقعی برای یک ساختمان مجزا و بحث در مورد آنها پس از آن.
به عنوان نمونه آزمایشی، از ساختمان گروه تحقیقاتی GIScience دانشگاه هایدلبرگ استفاده شده است. این یک ساختمان دانشگاهی با اندازه متوسط است که از یک زیرزمین و سه طبقه بالاتر از سطح زمین تشکیل شده است. شکل 4 (الف) یک مدل سه بعدی از قسمت جلویی ساختمان با ورودی اصلی را نشان می دهد، در حالی که شکل 4(ب) قسمت پشتی ساختمان را با پنجره های زیرزمین و درهای گاراژ نشان می دهد (آنها می توانند به عنوان خروجی اضطراری عمل کنند). در داخل ساختمان، طبقات مختلف از طریق دو راه پله به یکدیگر متصل می شوند. این ساختمان دارای یک اتاق سخنرانی بزرگ با ظرفیت 120 نفر، یک اتاق سخنرانی کوچکتر برای 30 نفر و دو استخر کامپیوتر با ظرفیت 25 و 16 نفر می باشد. علاوه بر این، چندین دفتر وجود دارد که توسط یک تا سه نفر اشغال می شود. برای هر دو سناریو شبیه سازی تخلیه فرض می شود که ساختمان به طور کامل اشغال شده است، که منجر به مجموع 313 نفر در ساختمان می شود. جدول 1 شامل توزیع آن ها در طبقات مختلف است. برای هر دو سناریو، MATSimشبیه سازی تخلیه انجام شده است. همه فایل های ورودی مورد نیاز به طور خودکار از داده های IndoorOSM تولید شده اند .
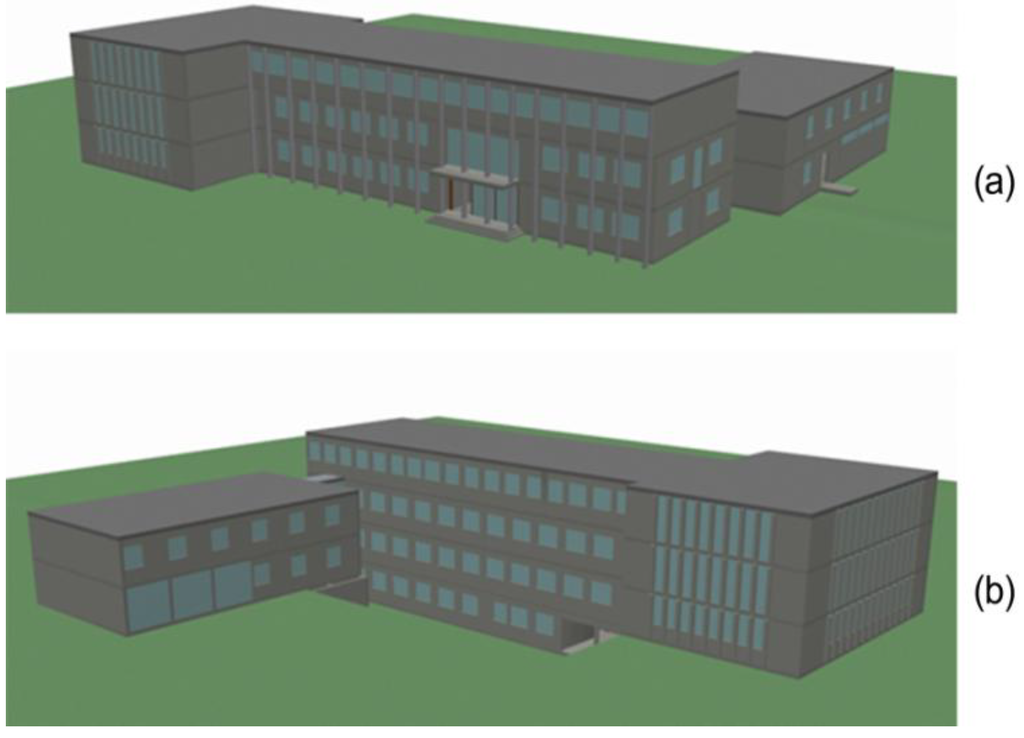
شکل 4. یک مدل سه بعدی از ساختمان مورد استفاده: سمت جلو با ورودی اصلی ( a ) و سمت عقب با درهای گاراژ و پنجره های زیرزمین ( b ).

جدول 1. توزیع جمعیتی برای طبقات مختلف ساختمان.
4.1. سناریو 1: پاکسازی برنامه ریزی شده سایت
اولین سناریوی تخلیه نشان دهنده پاکسازی محل برنامه ریزی شده است. از آنجایی که همه عوامل باید از طریق ورودی اصلی ساختمان را ترک کنند، فایل evacuationarea.xml شامل همه پیوندها به جز پیوند ورودی اصلی به بیرون ساختمان است. در مجموع 100 شبیه سازی انجام شده است، زیرا عوامل MATSim می توانند از شبیه سازی های قبلی بیاموزند که بر رفتار آنها در تکرارهای شبیه سازی آینده تأثیر می گذارد. با توجه به تمامی تکرارها، میانگین مسافت پیموده شده برای طرح اجرا شده 39.55 متر، برای بدترین طرح 39.62 متر ( یعنی طولانی ترین زمان تخلیه کلی برای ساختمان کامل)، 39.52 متر برای طرح متوسط و 39.46 متر برای بهترین طرح است. یعنی، کوتاه ترین زمان تخلیه کلی). با بررسی تکرارهای مختلف با جزئیات بیشتر، مکانیسم های یادگیری MATSim آشکار می شود. یک مثال این است که در همان اولین تکرار همه دانشجویان از اتاق سخنرانی بزرگ (که در طبقه همکف است) از مسیر مستقیم خروجی ساختمان استفاده می کنند. این امر باعث ایجاد ترافیک عظیم در راهروها می شود. در مقابل، در آخرین تکرارها، برخی از عوامل با راه رفتن مستقیم به طبقه اول (از طریق راه پله کنار اتاق سخنرانی)، عبور از راهرو و سپس بازگشت به طبقه همکف از طریق راه پله دیگر (که این است) از آن ترافیک جلوگیری می کنند. مستقیماً در مجاورت خروجی). با این حال، اگرچه این یادگیری منجر به زمانهای تخلیه کوتاهتر میشود (به عنوان مثال، زمان لازم برای رسیدن به یک مکان امن) برای برخی از عوامل فردی، سناریوی کلی به سختی تغییر می کند ( جدول 2 را ببینید).
جدول 2. آمار زمان تخلیه: سناریو 1.
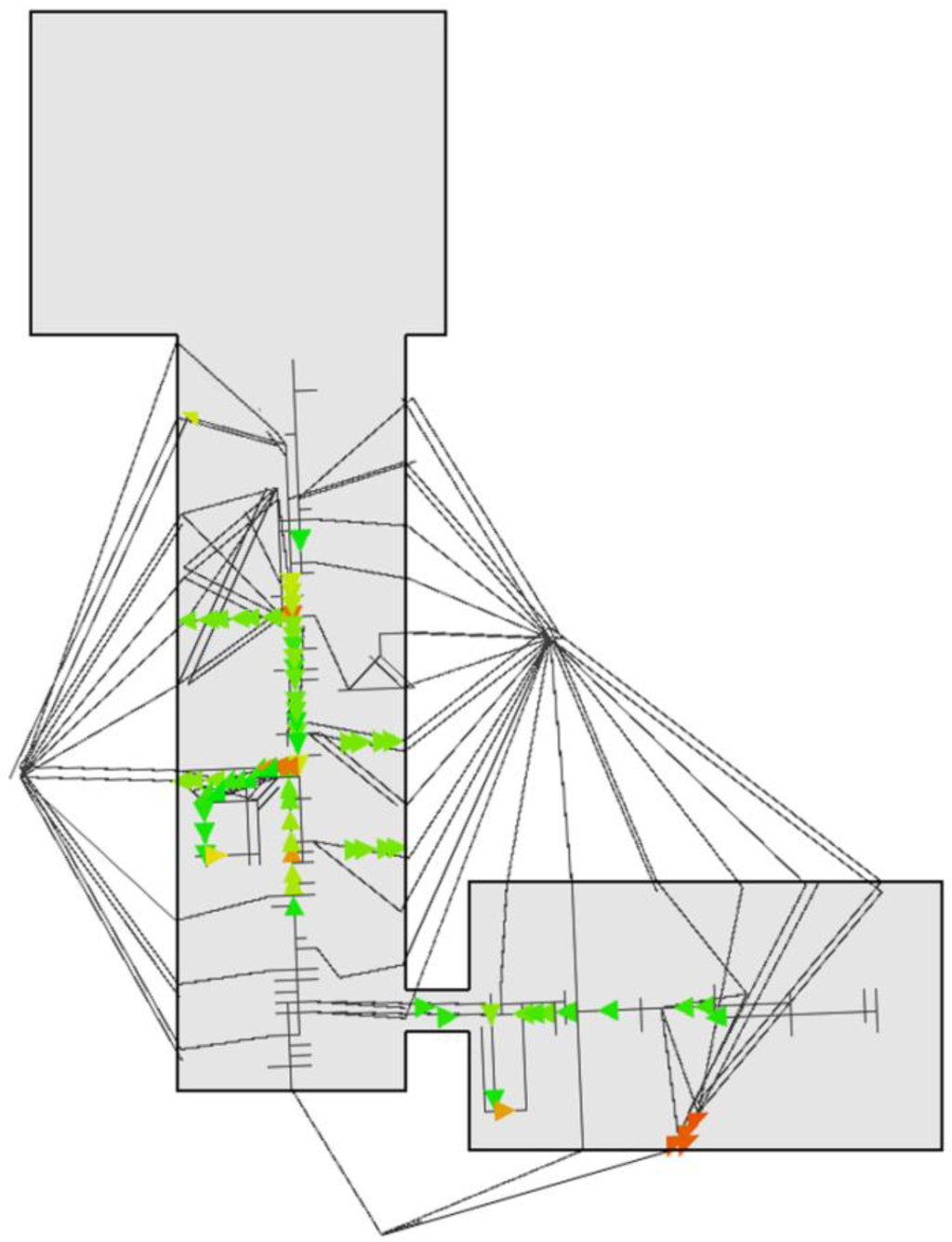
شکل 5 سناریوی شبیه سازی تخلیه را در مرحله اولیه (پس از 40 ثانیه) نشان می دهد. بدین ترتیب شبکه زیربنایی و همچنین طرح کلی ساختمان تجسم می شود. رنگ های متفاوت عوامل نشان دهنده وضعیت فعلی آنهاست. سبز نشان دهنده حرکت آزاد با حداکثر سرعت، نارنجی نشان دهنده کاهش سرعت در جریان ترافیک و قرمز نشان دهنده ترافیک در قسمت مربوطه ساختمان است. در شکل 5 مشاهده می شود که راه پله کنار خروجی ساختمان یک گلوگاه است زیرا عوامل این منطقه به دلیل ترافیک باید سرعت حرکت خود را کاهش دهند.
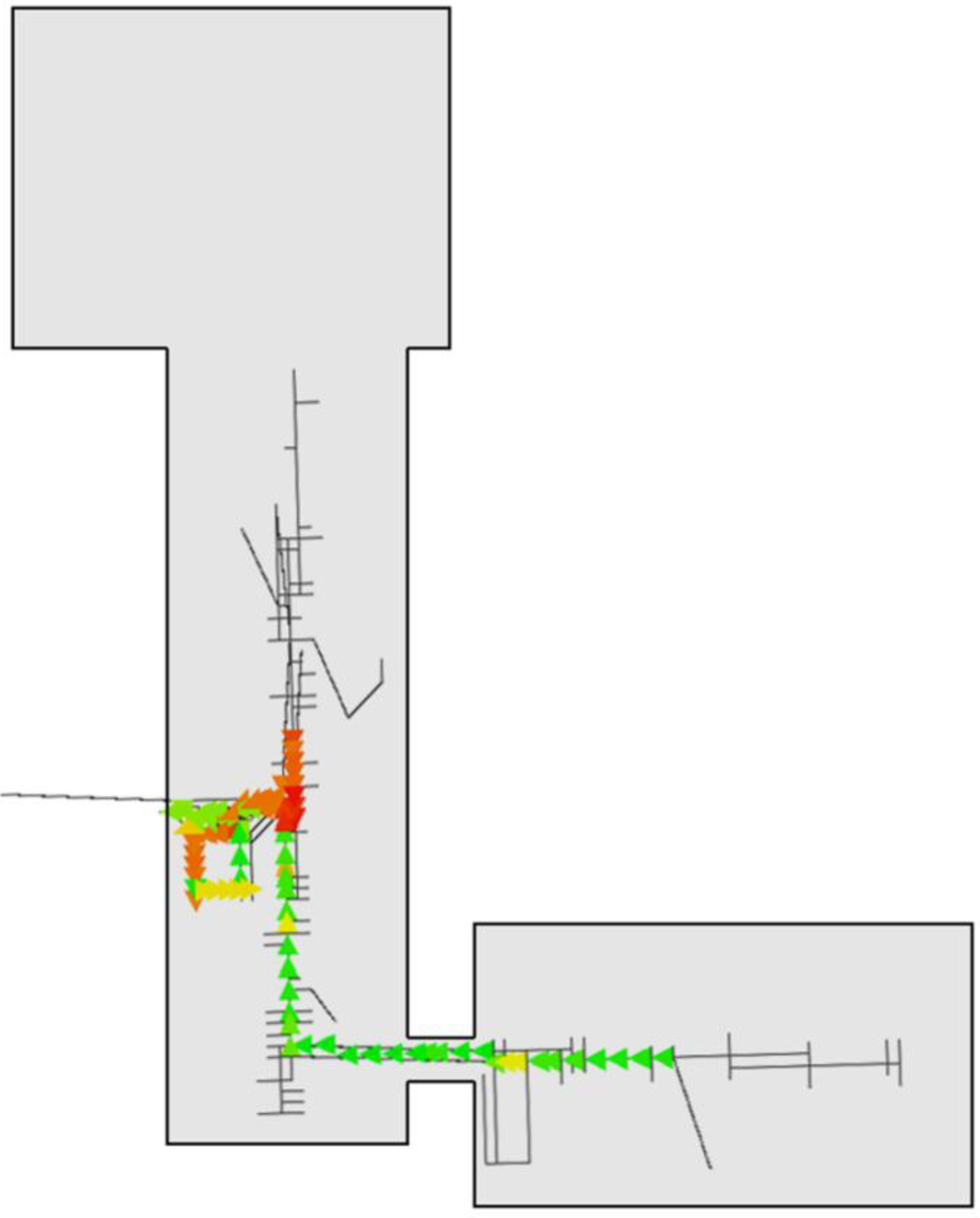
شکل 5. تجسم شبیه سازی تخلیه سناریوی 1 در پیشرفت اولیه آن پس از 40 ثانیه.
4.2. سناریو 2: تخلیه پیش بینی نشده
سناریوی تخلیه دوم نشان دهنده یک تخلیه پیش بینی نشده است. این موارد معمولاً در مورد یک حادثه غیر قابل پیش بینی مانند آتش سوزی یا زلزله مورد نیاز است. در این سناریو، همه عوامل فورا سعی می کنند تا ساختمان را با بیشترین سرعت ممکن ترک کنند. برای اهداف ساده سازی، مجدداً فرض می شود که همه عوامل حرکت خود را به طور همزمان در ابتدای شبیه سازی آغاز می کنند. بر خلاف شبیه سازی قبلی، سناریو 2 تمام خروجی های ممکن را در خود جای داده است. اساسا تمامی پنجره های زیرزمین و همکف و تمامی درهای (گاراژ) خروجی اضطراری محسوب می شوند. بنابراین، شبکه همچنین حاوی پیوندهایی بین اتاق ها و پنجره های مربوطه است. علاوه بر این، تمام پنجره ها از طریق پیوندهایی به محیط امن در فضای باز متصل می شوند. evacuationarea.xml _فایل فقط حاوی لینک هایی است که در داخل ساختمان هستند.
در مورد هر 100 تکرار، میانگین مسافت طی شده برای طرح اجرا شده 22.86 متر، برای بدترین طرح 23.06 متر، برای برنامه متوسط 22.85 متر و برای بهترین طرح 22.74 متر است. مشابه سناریوی 1، جدول 3 آمار زمان تخلیه را برای سناریوی 2 شبیه سازی تخلیه ارائه می دهد. باز هم، زمان تخلیه به عنوان زمان بین شروع شبیه سازی و زمان تا زمانی که عامل مربوطه به یک مکان امن می رسد تعریف می شود. زمان تخلیه برای اولین عامل 2.1 ثانیه ناشی از فرض واکنش فوری عوامل فردی است. برخی از عوامل در زیرزمین و همچنین در طبقه همکف می توانند از پنجره ها به عنوان خروجی اضطراری استفاده کنند. این منجر به کاهش میانگین زمان تخلیه و مسافت سفر می شود (در مقایسه با سناریوی 1). شکل 6سناریوی 2 شبیه سازی تخلیه را پس از یک دوره 10 ثانیه به تصویر می کشد. تفاوت اصلی در آن شبکه ای است که پنجره های مناسب را نیز به عنوان خروجی اضطراری در خود جای داده است.
جدول 3. آمار زمان تخلیه: سناریو 2.
شکل 6. تجسم شبیه سازی تخلیه سناریوی 2 در پیشرفت اولیه آن پس از 10 ثانیه.
5. بحث
در حین بررسی احتمالات برای تولید خودکار شبیهسازیهای تخلیه داخلی و انجام دو سناریو مثالی شبیهسازی مورد استفاده، محدودیتها و مسائل مختلف در مورد دادههای موجود در IndoorOSM و چارچوب شبیهسازی MATSim آشکار شد. آنها در دو بخش فرعی بعدی مورد بحث قرار خواهند گرفت. بخش 5.1 بر مناسب بودن دادههای جغرافیایی داخلی جمعسپاری شده برای شبیهسازی تخلیه تمرکز دارد. پس از آن، بخش 5.2 چندین محدودیت چارچوب شبیه سازی MATSim برای شبیه سازی تخلیه داخلی را مورد بحث قرار می دهد.
5.1. محدودیت های داده های IndoorOSM
دادههای جغرافیایی داخلی جمعسپاری شده از OSM حاوی اطلاعات بسیار دقیقی در مورد ساختار داخلی یک ساختمان است. در بخش قبل علاوه بر این نشان داده شد که امکان استفاده از این داده ها برای سناریوهای مختلف شبیه سازی تخلیه وجود دارد. با این وجود، در حین انجام تحقیق ارائه شده در اینجا، چندین محدودیت و محدودیت آشکار شد. به طور کلی، IndoorOSM حاوی اطلاعات دقیق در مورد هندسه و توپولوژی هر طبقه ساختمان است. به این معنا که پلانهای طبقه دقیق، مانند نقشههای تخلیه، و همچنین نمودارهای مسیریابی که برای مسیریابی منفرد داخل ساختمان و همچنین شبیهسازی تخلیه جرم در داخل خانه مناسب هستند، میتوانند بر اساس این منبع داده تولید شوند. برای بررسی عملکرد تخلیه یک ساختمان آینده، به عنوان مثالسناریویی که هیچ رقم واقعی برای آن در دسترس نیست، این رویکرد منجر به نتایج شبیهسازی رضایتبخشی میشود که اولین شاخص ایمنی ساختمان را ارائه میدهد. با این وجود، برای نتایج واقعی تر و به ویژه برای شبیه سازی عملکرد ساختمان های موجود که داده های دنیای واقعی برای آنها وجود دارد، IndoorOSM فاقد انواع مختلف اطلاعات است.
همانطور که قبلاً در بخش 3.2 بحث شد ، ارقام جمعیت واقعی در حال حاضر در IndoorOSM موجود نیست . یعنی IndoorOSM برای تولید شبکه زیربنایی مناسب است، اما جمعیت (اعم از واقعی یا مصنوعی) را نمی توان تنها با استفاده از داده های IndoorOSM تولید کرد . با توجه به روش باز بودن جفت کلید-مقدار OSM، می توان استدلال کرد که یک کلید مناسب (مثلا جمعیت=2 و غیره ).) می تواند به راحتی تعریف و برای این تلاش استفاده شود. با این حال، اینکه آیا چنین کلیدی برای توصیف ارقام جمعیت (پویا) مناسب است یا نه، جای سوال است، زیرا تعداد جمعیت معمولاً با تغییر تاریخ، زمان، یا عملکرد اتاق متفاوت است. به عنوان مثال، یک اتاق سخنرانی با میز می تواند دانشجویان کمتری را نسبت به یک اتاق سخنرانی خالی در خود جای دهد (مثلاً در مورد یک مراسم). مثال دیگر این است که تعداد انسان ها در فصل زمستان در استخرهای سرپوشیده بیشتر از فصل تابستان است. یعنی هنگام معرفی چنین کلیدی در OSM، هنوز مشخص نیست که برای چه زمانی از روز یا فصلی معتبر است. علاوه بر این، جمعیت ممکن است در طول زمان تغییر کند، برای مثال به دلیل جابجایی افراد از یک اداره به دفتر دیگر، و اگر چنین اطلاعاتی در حال تغییر (سریع) به درستی در OSM نگهداری شود (برخلاف هندسه یک ساختمان که نسبتاً ایستا است) جای سوال دارد. با این وجود، یک کلید بالقوهجمعیت ممکن است شاخصی در مورد حداکثر ظرفیت یک اتاق ارائه دهد، مثلاً یک دفتر برای پذیرش چهار کارمند دائمی مناسب است یا یک اتاق سخنرانی می تواند 100 دانشجو را در خود جای دهد. به عنوان یک نتیجه، چنین اطلاعات حداکثر ظرفیت میتواند برای شبیهسازیهای بدترین حالت استفاده شود که علاوه بر این بینشی در مورد عملکرد تخلیه در بدترین حالت یک ساختمان (آینده) ارائه میدهد. با این وجود، برای جمعآوری نتایج واقعیتر و محتملتر – بهویژه برای ساختمانهای موجود – ترکیب اضافی سایر منابع دادههای موجود، مانند دادههای جغرافیایی مرتبط [ 56 ]، دادههای زمان واقعی (به اصطلاح شهرهای زنده ) [ 57 ]، یا مدیریت تسهیلات. سیستم ها، احتمالا به نتایج شبیه سازی واقعی تر منجر خواهند شد.
در ارتباط نزدیک با این موضوع، IndoorOSM (و احتمالاً سایر منابع داده) در حال حاضر اطلاعات دقیق تری در مورد ساکنان فردی ندارد. یعنی حتی اگر مشارکتکنندگان OSM اطلاعات جمعیتی را ارائه دهند، جزئیات بیشتری در مورد افراد خاص مانند جنس، سن، وضعیت سلامتی و غیره در دسترس نیست. یعنی در حین انجام شبیهسازی تخلیه، باز هم باید مقادیر و پارامترهای تصادفی را به هر عامل اختصاص داد، ارقام دنیای واقعی را به صورت دستی اختصاص داد، یا (اگر فقط به نتایج تقریبی نیاز داشت) یک شبیهسازی با مقادیر متوسط انجام داد و همه عوامل را به عنوان موجود در نظر گرفت. از نظر فیزیکی برابر IndoorOSMدر حال حاضر نمیتوان – و به احتمال زیاد هرگز نخواهد توانست – جزئیات دقیقی در مورد ساکنان مختلف یک ساختمان ارائه دهد. نتیجه گیری در مورد وضعیت (متوسط) ساکنان یک ساختمان با توجه به عملکرد ساختمان احتمالاً تنها راه حل زمانی است که فقط از داده های OSM استفاده می شود. به عنوان مثال، اگر ساختمانی با برچسب رفاه=دانشگاه برچسب گذاری شده باشد، می توان استدلال کرد که اکثر ساکنان آن دانشجو هستند، بنابراین سالم و حیاتی هستند، در حالی که در مقابل ساکنان ساختمانی که دارای برچسب رفاه=بیمارستان هستند، احتمالاً از نظر رفت و آمد چندان حیاتی و محدود نیستند. و سرعت سفر
بسته به طرح ساختمان و سناریوی تخلیه مربوطه، پنجره ها نیز می توانند به عنوان خروجی های اضطراری احتمالی در نظر گرفته شوند. با این حال، انتخاب پنجره هایی که می توانند به عنوان خروجی اضطراری عمل کنند، کار آسانی نیست. اگرچه اطلاعات مربوط به مکان (x، y و z) و همچنین ارتفاع و عرض یک پنجره اساساً در IndoorOSM موجود است.انتخاب پنجره های اضطراری مناسب همیشه به راحتی امکان پذیر نیست زیرا هم زمین اطراف و هم چیدمان ساختمان باید در فرآیند انتخاب گنجانده شود. تا حدودی می توان فرض کرد که تمام پنجره های طبقه همکف به طور بالقوه می توانند به عنوان پنجره اضطراری عمل کنند. با این حال ممکن است کاملاً دشوار باشد که طبقه همکف را تعریف کنیم، به عنوان مثال در مورد یک ساختمان در دامنه تپه. همچنین ممکن است یک پنجره در طبقه دوم – به دلیل شیب زمین – همچنان به عنوان خروجی اضطراری مورد استفاده قرار گیرد. همچنین، اگر ساختمانی مستقیماً در کنار دریاچه قرار داشته باشد، ممکن است امکان پریدن از پشت بام به داخل دریاچه وجود داشته باشد. در مقابل، در ساختمانی که در کنار دره قرار دارد، پنجره هایی که رو به دره هستند نمی توانند به عنوان خروجی اضطراری حتی در سطح زمین عمل کنند. همچنین، برای برخی از سازه های ساختمانی ممکن است با بالا رفتن از پنجره در طبقه دوم به پشت بام طبقه اول و سپس بالا رفتن از روی زمین، یک ساختمان بیرون بیاید. با این حال،IndoorOSM در حال حاضر فاقد اطلاعات اضافی برای توصیف مناسب بودن اضطراری فردی یک پنجره است، اگرچه این نوع اطلاعات احتمالاً نتایج شبیه سازی را بهبود می بخشد. با این وجود، با معرفی یک برچسب جدید، به عنوان مثال، اضطراری:خروج=yes ، که به گره پنجره مربوطه اضافه میشود، مشارکتکنندگان OSM میتوانند به راحتی و به وضوح تعریف کنند که کدام پنجره میتواند به عنوان خروجی اضطراری باشد و کدامیک نه. یعنی اصولاً این نوع اطلاعات را می توان به OSM اضافه کرد و سپس هنگام انتخاب پنجره های مناسب برای شبیه سازی تخلیه فردی خود از آنها استفاده کرد.
یکی دیگر از جنبه های مهم که هنوز در IndoorOSM به سختی مورد توجه قرار گرفته است ، ادغام موانع و موانع در داخل ساختمان ها است. اینها میتوانند اجسام ساکن مانند مبلمان یا پایهها و همچنین اجسام دینامیکی مانند سقوط قسمتهایی از سقف باشند. هر دو نوع بر رفتار انبوه در داخل ساختمان و در نتیجه بر اجرا و عملکرد تخلیه تأثیر میگذارند. نوع قبلی مانع هنوز در IndoorOSM موجود نیست. با این وجود، مشارکتکنندگان میتوانند یک راه بسته ارائه دهند که نمای کلی مانع را نشان میدهد و آن را با یک برچسب مناسب، به عنوان مثال، مانع=میز یا مانع=کمد برچسبگذاری کند.. یعنی مشارکتکنندهای که واقعاً به جزئیات محیطهای داخلی اهمیت میدهد اساساً میتواند اطلاعاتی درباره موانع ارائه دهد، اما چنین اطلاعاتی هنوز در مجموعه دادههای OSM فعلی موجود نیست. در مقابل، اطلاعاتی در مورد اجسام پویا و متحرک نمیتوان ارائه کرد، زیرا هر شی در OSM تنها میتواند برای یک نقطه زمانی مشخص نمایش داده شود و دینامیک نمیتواند با مدل داده OSM فعلی بیان شود. به این معنا که چنین دادههایی (چه زنده یا مصنوعی) باید به صورت دستی تولید شوند، به عنوان مثال با محاسبه و مدلسازی انتشار دود متراکم، یا با ادغام حسگرهای زنده، به عنوان مثال با استفاده از سرویس مشاهدات حسگر فضایی باز (OGC) (SOS). ) [ 58 ]. رویکرد دوم مشابه ایده قبلی است که در مورد ادغام داده های بلادرنگ از به اصطلاح ذکر شدشهرهای زنده ( به بالا مراجعه کنید).
در ارتباط نزدیک با این موضوع، IndoorOSM فقط اطلاعات محدودی در مورد ارتفاع تک تک قطعات ساختمان (به عنوان مثال، اتاق ها یا راهروها) ارائه می دهد. اگرچه IndoorOSM ارتفاع کلید را برای ارائه اطلاعات در مورد ارتفاع اتاق پیشنهاد می کند، همیشه مشخص نیست که این ارتفاع برای کدام قسمت از اتاق معتبر است. اساساً، سقفی با سطح شیبدار (که نمیتوان آن را در IndoorOSM نشان داد یا توصیف کرد ) ممکن است ارتفاعهای متفاوتی داشته باشد، یا اجسام آویزان مانند لامپها احتمالاً ارتفاع مؤثر اتاق را کاهش میدهند. علاوه بر این، ارتفاع موثر ممکن است به دلیل برخی مبلمان یا مانع کاهش یابد ( نک. در بالا). با این وجود، بسته به سناریوی تخلیه، چنین اطلاعاتی باید یکپارچه شوند، زیرا مسیرهای تخلیه احتمالی ممکن است تحت تأثیر چنین شرایطی قرار گیرند، به عنوان مثال یک راننده ویلچر نمی تواند از موانع روی زمین عبور کند.
بهعنوان نتیجهگیری از این بخش، به نظر میرسد که دادههای جغرافیایی داخلی جمعسپاری شده از OSM حاوی اطلاعات مفصلی در مورد ویژگیهای استاتیکی یک ساختمان است، اما در حال حاضر فاقد هر دو جنبه دینامیکی و همچنین اطلاعات جمعیتی است. علاوه بر این، می توان بیان کرد که احتمالاً چنین اطلاعاتی هرگز در OSM ادغام نمی شوند، یعنی شبیه سازی های تخلیه که صرفاً مبتنی بر داده های OSM هستند و به ویژه داده های اضافی (مصنوعی یا واقعی) را ادغام نمی کنند، همیشه منجر به شبیه سازی درشت می شوند. با این حال، به نظر میرسد که دادههای جغرافیایی داخلی جمعسپاری شده یک منبع داده اضافی غنی است که اطلاعات دقیقی در مورد هندسه و توپولوژی یک ساختمان ارائه میدهد. یعنی IndoorOSMمی توان اساساً برای تولید هر نوع جزء استاتیکی شبیه سازی تخلیه داخلی استفاده کرد.
5.2. محدودیت های چارچوب شبیه سازی MATSim
ثابت شده است که MATSim نه تنها برای شبیه سازی در فضای باز، بلکه برای شبیه سازی تخلیه داخل خانه نیز مناسب است. البته لازم به ذکر است که MATSim و اساساً مدل صف آن برای انجام شبیهسازیهای داخلی محدودیتهایی دارد. از آنجایی که شبکه در MATSim هدایت میشود و راهروها در محیطهای داخلی معمولاً به یک جهت حرکت مشخص محدود نمیشوند (به استثنای برخی موارد خاص، مانند کنترلهای امنیتی یا پلههای برقی)، شبکه MATSim معمولاً شامل دو پیوند مستقیم با همان مقدار است. پرملن ها و همین ظرفیت . با این حال، مقدار پرملن ها وظرفیت یک لینک به شدت به وضعیت ترافیک فعلی در پیوند مقابل بستگی دارد. به عنوان مثال، ظرفیت یک راهرو که در آن ماموران فقط در یک جهت حرکت می کنند با ظرفیت در مورد مامورانی که در هر دو جهت حرکت می کنند متفاوت است. برای نمایش مناسب این اثر، یک انطباق پویا از هر دو ظرفیت و permlanes برای پیوندهای تحت تأثیر مورد نیاز است. با این حال، این (در حال حاضر) با MATSim امکان پذیر نیست . یعنی برای شبیه سازی جریان های عادی ترافیک در یک ساختمان، MATSim مناسب نیست. با این وجود، برای سناریوهای شبیه سازی تخلیه که در آن همه عوامل به خارج از ساختمان حرکت می کنند، MATSimیک چارچوب شبیه سازی مناسب است. همچنین عوامل MATSim باهوش نیستند. از آنجایی که آنها به شبکه شبیه سازی گره خورده اند، حرکت آنها نسبتاً خطی است. علاوه بر این، آنها به جهت شبکه محدود می شوند، بنابراین نمی توانند جهت حرکت را در حین عبور از یک پیوند تغییر دهند. این رفتار کاملاً برای شبیهسازی ترافیک خودرو مناسب است، اما محدودیتهای ذکر شده را هنگام شبیهسازی رفتار عابر پیاده به همراه دارد. یعنی یک فضای حرکتی دو بعدی واقعی برای عامل احتمالاً به نتایج شبیهسازی متفاوت (بهتر) منجر میشود.
نوع دیگری از دادههای دینامیکی که در MATSim قابل نمایش نیست ، در نظر گرفتن انواع مختلف حرکت یک عامل، مانند راه رفتن یا دویدن است. همانطور که در بخش های قبلی بحث شد، فضای تحت پوشش یک عامل واحد به صورت جهانی برای همه عوامل تعریف شده است. با این حال، می توان استدلال کرد که این مقادیر با نوع حرکت واقعی عامل متفاوت است، به عنوان مثال، یک فرد در حال دویدن احتمالاً به فضای بیشتری (مخصوصاً در جهت حرکت) نسبت به یک فرد سونتر نیاز دارد. می توان فرض کرد که عوامل مختلف (بسته به وضعیت سلامتی و همچنین سطح استرس آنها) انواع مختلف حرکت را ترجیح می دهند. یعنی انطباق پویا از فضای تحت پوشش برای عوامل دلخواه احتمالاً به نتایج واقع بینانه تری می انجامد.
6. نتیجه گیری و کار آینده
این مقاله استفاده از دادههای جغرافیایی داخلی را از OSM ( IndoorOSM ) برای شبیهسازی تخلیه داخلی پیشنهاد میکند. می توان نتیجه گرفت که اساساً انجام شبیه سازی تخلیه چند عاملی با MATSim بر اساس داده های IndoorOSM امکان پذیر است. یعنی نه تنها برنامههای ساده برنامهریزی مسیر را میتوان با دادههای جغرافیایی داخلی جمعسپاریشده ایجاد کرد، بلکه برنامههای پیچیدهتر و پیشرفتهتر، مانند شبیهسازی تخلیه، میتوانند از IndoorOSM بهره ببرند . با این حال، همانطور که در بخش قبل بحث شد، محدودیتها و محدودیتهایی در مورد دادههای IndoorOSM و چارچوب شبیهسازی MATSim وجود دارد. در اصل، IndoorOSMفقط برای تولید اجزای سناریوی ایستا، مانند هندسه و توپولوژی داخلی ساختمان مناسب است. هر نوع عامل دینامیکی مانند اجسام متحرک یا انتشار گاز را نمی توان در IndoorOSM ترسیم کرد . یعنی، چنین جزئیاتی را نمیتوان با دادههای crowdsourced داخلی از OSM پر یا شبیهسازی کرد. علاوه بر این، اطلاعات دقیق در مورد جمعیت واقعی یک ساختمان به سختی می تواند از طریق IndoorOSM ارائه شود . با توجه به مدل صف، MATSim قادر به شبیه سازی حرکت دو بعدی واقعی نیست. علاوه بر این، MATSimنمی تواند فضاهای حرکتی مختلف را برای انواع مختلف حرکات شبیه سازی کند. با توجه به شبیه سازی تجربی انجام شده، لازم به ذکر است که ساده سازی های مختلفی انجام شده است که برای هدف مقاله مناسب است، اما نتایج شبیه سازی را تحت تاثیر قرار می دهد.
از آنجایی که دادههای جمعسپاری معمولاً توسط کاربران غیرحرفهای ایجاد میشوند و به دلیل پارادایم دسترسی باز OSM، دادههای موجود همیشه در معرض خطا و همچنین خرابکاری هستند – این نیز یکی از اصلیترین استدلالهای متقابل برای اشخاص ثالث در هنگام ارزیابی است. استفاده بالقوه از داده های OSM با این وجود، برای شبکه جاده قبلاً ثابت شده است که جمعیت قادر به جمعآوری دادههای ریزدانه است که با دادههای جمعآوریشده تجاری قابل مقایسه است [ 8 ]]. نگرانیهای کیفیت برای فضاهای داخلی با جزئیات بسیار مهمتر است، زیرا محیطهای داخلی معمولاً نسبت به فضاهای بیرونی ریزدانهتر هستند، بهویژه هنگام انجام شبیهسازیهای پیچیده، همانطور که برای مثال در این مقاله مورد بحث قرار گرفت. با این حال، به دلیل تازگی آن، هنوز داده های کافی برای انجام تجزیه و تحلیل جامع کیفیت یا مقایسه داده های داخلی جمع آوری شده با داده های تجاری جمع آوری شده در دسترس نیست. با این وجود، به محض اینکه دادههای بیشتری در دسترس باشد، برای حمایت از اهمیت دادههای داخلی جمعسپاری شده، به آنها نیاز خواهد بود. برای کارهای آینده جالب خواهد بود که ببینیم آیا داده های IndoorOSM را می توان برای شبیه سازی های تخلیه داخلی استفاده کرد که بر اساس یک نمودار نیستند، بلکه بر اساس ساختارهای چند ضلعی (به عنوان مثال، حرکت دو بعدی واقعی عوامل). ترکیبی از شبیه سازی تخلیه داخلی و خارجی بر اساس داده های OSM یک کار مطلوب، اما چالش برانگیز است. همانطور که بحث شد، IndoorOSM محدودیت هایی دارد و احتمالاً نمی توان هر ساختار ساختمانی را در OSM ترسیم کرد. برای غلبه بر این مسئله، محققان در نظر دارند شهرهای سه بعدی مجازی و به ویژه مدل های ساختمان های سه بعدی [ 59 ] را جمع سپاری کنند، که به طور بالقوه می تواند برای شبیه سازی تخلیه داخلی استفاده شود. با این حال، از آنجایی که این رویکرد OpenBuildingModels [ 59 ] در حال حاضر هنوز در مراحل ابتدایی است و هنوز تعداد زیادی ساختمان در دسترس نیست، این هنوز به نتیجه نرسیده است.
منابع
- اشمیتز، اس. Zipf، A.; Neis, P. Proposal to Define Common Resources for OpenGIS Location Services. در مجموعه مقالات پنجمین سمپوزیوم بین المللی LBS و TeleCartography، سالزبورگ، اتریش، 26-28 نوامبر 2008.
- نیس، پ. Zipf، A. OpenRouteService.org سه بار “باز” است: ترکیب OpenSource، OpenLS و OpenStreetMaps. در مجموعه مقالات کنفرانس GISRUK 2008، منچستر، انگلستان، 2 تا 4 آوریل 2008.
- نیس، پ. سینگر، پی. Zipf، A. نقشهبرداری مشارکتی و مسیریابی اضطراری برای لجستیک بلایا – مطالعات موردی از زلزله هائیتی و پورتال سازمان ملل برای آفریقا. در مجموعه مقالات تقاطع جغرافیایی @ GI_Forum ’10، سالزبورگ، اتریش، 6-9 ژوئیه 2010.
- دالمایر، جی. لاتنر، AD; تیمم، آی جی از GIS تا شبیه سازی ترافیک مختلط در سناریوهای شهری. در مجموعه مقالات چهارمین کنفرانس بین المللی ICST در مورد ابزارها و تکنیک های شبیه سازی، بارسلون، اسپانیا، 21-25 مارس 2011. صص 134-143.
- زیلسکه، ام. نویمان، ا. Nagel، K. OpenStreetMap برای شبیه سازی ترافیک. در مجموعه مقالات وضعیت نقشه اروپا 2011 (SOTM-EU)، وین، اتریش، 15-17 ژوئیه 2011; صص 126-134.
- زیلسترا، دی. Zipf، A. مطالعه مقایسه ای ژئوداده اختصاصی و اطلاعات جغرافیایی داوطلبانه برای آلمان. در مجموعه مقالات سیزدهمین کنفرانس بین المللی AGILE در علم اطلاعات جغرافیایی، گیماراس، پرتغال، 10-14 مه 2010. صص 1-15.
- Haklay, M. اطلاعات جغرافیایی داوطلبانه چقدر خوب است؟ مطالعه تطبیقی مجموعه دادههای OpenStreetMap و Ordnance Survey. محیط زیست طرح. B 2010 , 37 , 682-703. [ Google Scholar ]
- نیس، پ. زیلسترا، دی. Zipf، A. تکامل شبکه خیابانی نقشههای جمعسپاری: OpenStreetMap در آلمان 2007-2011. اینترنت آینده 2012 ، 4 ، 1-21. [ Google Scholar ]
- زمستان، S. اطلاعات فضایی داخلی. بین المللی J. 3-D Inf. مدل. 2012 ، 1 ، 25-42. [ Google Scholar ]
- جنسن، سی. لی، ک.-جی. Winter, S. 87% دیگر: گزارشی در مورد دومین کارگاه بین المللی آگاهی فضایی داخلی (سن خوزه، کالیفرنیا-2 نوامبر 2010). خبرنامه ACM Sigspatial 2011 ، 3 ، 10-12. [ Google Scholar ]
- گوتز، ام. Zipf، A. گسترش OpenStreetMap به محیط های داخلی: آوردن اطلاعات جغرافیایی داوطلبانه به سطح بعدی. در مجموعه مقالات مدیریت داده های شهری و منطقه ای: UDMS سالانه 2011، دلفت، هلند، 28-30 سپتامبر 2011. ص 47-58.
- OSM IndoorOSM. در دسترس آنلاین: http://wiki.openstreetmap.org/wiki/IndoorOSM (دسترسی در 10 مه 2012).
- Goetz, M. به سمت تولید مدلهای بسیار دقیق 3D CityGML از OpenStreetMap. بین المللی جی. جئوگ. Inf. علمی 2012 ، پذیرفته شد. [ Google Scholar ]
- Zipf، A.; باسانو، جی. نیس، پ. نوبائر، اس. Schilling، A. Towards 3D Spatial Data Infrastructures (3D-SDI) بر اساس استانداردهای باز – تجربیات، نتایج و مسائل آینده. در پیشرفتها در سیستمهای اطلاعات جغرافیایی سه بعدی، یادداشتهای سخنرانی در اطلاعات جغرافیایی و کارتوگرافی ؛ van Oosterom، P.، Zlatanova، S.، Penninga، F.، Fendel، EM، Eds. Springer: هایدلبرگ، آلمان، 2007; صص 65-86. [ Google Scholar ]
- Kolbe، TH در حال ارائه و مبادله مدل های سه بعدی شهر با CityGML. در 3D GEO-Information Sciences LNG&C قسمت اول ; Lee, J., Zlatanova, S., Eds. Springer: هایدلبرگ، آلمان، 2009; صص 15-31. [ Google Scholar ]
- کلبه، تی. گروگر، جی. Plümer, L. CityGML: مدل های سه بعدی شهر و پتانسیل آنها برای واکنش اضطراری. در فناوری اطلاعات مکانی برای واکنش اضطراری ; زلاتانوا، اس.، لی، ج.، ویرایش. تیلور و فرانسیس: لندن، بریتانیا، 2008; صص 257-274. [ Google Scholar ]
- گوتز، ام. Zipf، A. برنامه ریزی مسیرهای داخلی با اطلاعات جغرافیایی داوطلبانه بر روی یک پلت فرم مبتنی بر وب (موبایل). در مجموعه مقالات نهمین سمپوزیوم خدمات مبتنی بر مکان، مونیخ، آلمان، 16-18 اکتبر 2012; (پذیرفته شده)، ص. 16.
- گوتز، ام. IndoorOSM: نقشه برداری از دنیای داخلی. در دسترس آنلاین: http://indoorosm.uni-hd.de/ (دسترسی در 10 مه 2012).
- گوتز، ام. استفاده از دادههای جغرافیایی داخلی جمعسپاری شده برای ایجاد یک برنامه وب مسیریابی داخلی سه بعدی. اینترنت آینده 2012 ، 4 ، 575-591. [ Google Scholar ] [ CrossRef ]
- شی، ج. رن، ا. چن، سی. مدل تخلیه ساختمانهای عمومی بزرگ تحت شرایط آتشسوزی مبتنی بر عامل. خودکار. ساخت و ساز 2008 ، 18 ، 338-347. [ Google Scholar ]
- اوکایا، م. یوتسوکورا، اس. ساتو، ک. تاکاهاشی، تی. شبیهسازی تخلیه عامل با استفاده از یک شبکه ترکیبی و مدلهای فضای آزاد. در مجموعه مقالات دوازدهمین کنفرانس بین المللی اصول تمرین در سیستم های چند عاملی، ناگویا، ژاپن، 14-16 دسامبر 2009. صص 563-570.
- Goodchild، MF Citizens به عنوان حسگرهای داوطلبانه: زیرساخت داده های مکانی در دنیای وب 2.0. بین المللی جی. اسپات. زیرساخت داده Res. 2007 ، 2 ، 24-32. [ Google Scholar ]
- ویژگی های نقشه OSM. در دسترس آنلاین: http://wiki.openstreetmap.org/wiki/Map_Features (در 23 ژوئیه 2012 قابل دسترسی است).
- Tagwatch Tagwatch Planet-جدیدترین. در دسترس آنلاین: http://tagwatch.stoecker.eu/Planet-latest/En/tags.html (دسترسی در 10 مه 2012).
- OSM OpenStreetMap ویکی. در دسترس آنلاین: http://wiki.openstreetmap.org/ (دسترسی در 10 مه 2012).
- OSM Indoor Mapping: OpenStreetMap Wiki. در دسترس آنلاین: http://wiki.openstreetmap.org/wiki/Indoor (دسترسی در 10 مه 2012).
- طاووس، RD; Kuligowski، کارگاه آموزشی ED در مورد حرکت ساکنان ساختمان در شرایط اضطراری آتش سوزی. انتشارات ویژه NIST 2005 ، 1032 ، 105. [ Google Scholar ]
- حاجی بابایی، ل. دلاور، م.ر. ملک، ام آر. فرانک، شبیه سازی مبتنی بر عامل AU از شناخت فضایی و راه یابی در تخلیه اضطراری آتش سوزی ساختمان. در راه حل های ژئوماتیک برای مدیریت بلایا نکات سخنرانی در اطلاعات جغرافیایی و نقشه برداری ; Li, J., Zlatanova, S., Fabbri, AG, Eds. Springer: برلین، آلمان، 2007; صص 255-270. [ Google Scholar ]
- یاماشیتا، تی. سودا، س. Noda، I. سیستم کمک برنامه ریزی تخلیه با شبیه ساز عابر پیاده مبتنی بر مدل شبکه. در مجموعه مقالات دوازدهمین کنفرانس بین المللی اصول تمرین در سیستم های چند عاملی، ناگویا، ژاپن، 14-16 دسامبر 2009. صص 649-656.
- وو، ال. لین، اچ. یک شبکه جاده شناختی فضایی شخصی برای مدلسازی مبتنی بر عامل شبیهسازی تخلیه عابر پیاده: مطالعه موردی در هنگ کنگ. ان GIS 2012 ، 18 ، 109-119. [ Google Scholar ] [ CrossRef ]
- گوین، اس. Galea، ER; اوون، ام. لارنس، پی جی. فیلیپیدیس، ال. مروری بر روش های مورد استفاده در شبیه سازی کامپیوتری تخلیه از محیط ساخته شده. ساختن. محیط زیست 1998 ، 34 ، 741-749. [ Google Scholar ]
- Schreckenberg، M. عابر پیاده و دینامیک تخلیه ; Springer: برلین، آلمان، 2001; پ. 452. [ Google Scholar ]
- شرکنبرگ، ام. شارما، SD عابر پیاده و دینامیک تخلیه ؛ Springer: برلین، آلمان، 2002; پ. 452. [ Google Scholar ]
- Galea، ER عابر پیاده و دینامیک تخلیه ; CMS Press: گرینویچ، انگلستان، 2003; پ. 411. [ Google Scholar ]
- والداو، ن. گاترمن، پی. Knoflacher، H.; Schreckenberg، M. عابر پیاده و دینامیک تخلیه ; Springer: برلین، آلمان، 2006; پ. 495. [ Google Scholar ]
- کلینگش، WWF؛ روگش، سی. Schadschneider، A. Schreckenberg، M. عابر پیاده و دینامیک تخلیه 2008 ; Springer: برلین، آلمان، 2010; پ. 847. [ Google Scholar ]
- طاووس، RD; Kuligowski، ED عابر پیاده و دینامیک تخلیه ; Springer: برلین، آلمان، 2011; پ. 910. [ Google Scholar ]
- بالمر، م. ریزر، ام. میستر، ک. چاریپار، دی. لوفور، ن. Nagel، K. MATSim-T: معماری و زمان های شبیه سازی. در سیستم های چند عاملی برای مهندسی ترافیک و حمل و نقل ؛ Bazzan, ALC, Klugl, F., Eds. مرجع گروه ایده: Hershey, PA, USA, 2009; صص 57-78. [ Google Scholar ]
- MATSim MATSim: جعبه ابزار شبیه سازی حمل و نقل چند عاملی. در دسترس آنلاین: http://www.matsim.org/ (دسترسی در 12 مه 2012).
- میستر، ک. بالمر، م. سیاری، اف. هورنی، ع. ریزر، ام. Waraich، RA; Axhausen، KW بهینهسازی تقاضای سفر مبتنی بر آژانس در مقیاس بزرگ در سوئیس اعمال شد، از جمله انتخاب حالت. در مجموعه مقالات دوازدهمین کنفرانس جهانی تحقیقات حمل و نقل، لیسبون، پرتغال، 11 تا 15 ژوئیه 2010. پ. 30.
- بخور، س. دوبلر، سی. Axhausen، KW ادغام فعالیت مبتنی بر مدلهای مبتنی بر عامل: نمونهای از مدل تل آویو و MATSim. در مجموعه مقالات نودمین نشست سالانه هیئت تحقیقات حمل و نقل، واشنگتن، دی سی، ایالات متحده آمریکا، 23 تا 27 ژانویه 2011. پ. 16.
- باکیالله، م. کلوپفل، اچ. لمل، جی. Zipf، A. شبیه سازی مبتنی بر عامل برای آمادگی در بلایا. در مجموعه مقالات ششمین کنفرانس بین المللی دینامیک عابر پیاده و تخلیه (PED 2012)، زوریخ، سوئیس، 6-8 ژوئن 2012.
- باکیالله، م. کلوپفل، اچ. لمل، جی. Zipf، A. به سمت یک مدل داده عمومی برای شبیه سازی تخلیه چند عامل در زمینه مدیریت بلایا. در مجموعه مقالات دومین کنفرانس بین المللی مدلسازی و مدیریت تخلیه، شیکاگو، IL، ایالات متحده آمریکا، 13 تا 15 اوت 2012.
- لمل، جی. کلوپفل، اچ. Nagel، K. مدل جریان شبکه MATSim برای شبیهسازی ترافیک سازگار با خروج اضطراری در مقیاس بزرگ و برنامهای برای تخلیه شهر پادانگ اندونزی در صورت هشدار سونامی. در رفتار عابر پیاده: مدل ها، جمع آوری داده ها و کاربردها . Timmermans, H., Ed. Emerald Group Publishing Limited: Bingley، UK، 2009; ص 245-264. [ Google Scholar ]
- گائو، دبلیو. بالمر، م. میلر، EJ مقایسه بین MATSim و EMME/2 در شبکه بزرگ تورنتو و منطقه همیلتون. ترانسپ Res. رکورد 2010 ، 2197 ، 118-128. [ Google Scholar ]
- سیتین، ن. Nagel، K. مدل صف موازی رویکرد به ریزشبیه سازی ترافیک. در مجموعه مقالات هشتاد و دومین نشست سالانه هیئت تحقیقات حمل و نقل، واشنگتن، دی سی، ایالات متحده آمریکا، 12 تا 16 ژانویه 2003. پ. 10.
- Dijkstra، EW یادداشتی در مورد دو مشکل در ارتباط با نمودارها. عدد. ریاضی. 1959 ، 1 ، 267-271. [ Google Scholar ]
- هارت، PE; نیلسون، نیوجرسی؛ رافائل، بی. مبنایی رسمی برای تعیین اکتشافی مسیرهای حداقل هزینه. IEEE T. Syst. علمی Cyb. 1968 ، 4 ، 100-107. [ Google Scholar ] [ CrossRef ]
- لورنز، بی. Ohlbach، HJ; استوفل، EP یک مدل فضایی ترکیبی برای نشان دادن محیط های داخلی. در مجموعه مقالات ششمین سمپوزیوم بین المللی وب و سیستم های اطلاعات جغرافیایی بی سیم (W2GIS 2006)، هنگ کنگ، چین، 4 تا 5 دسامبر 2006. صص 102-112.
- زلاتانوا، S. SII برای واکنش اضطراری: چالش های سه بعدی. در مجموعه مقالات بیست و یکم کنگره ISPRS، پکن، چین، 3 تا 11 ژوئیه 2008. قسمت B4-TYC IV، صفحات 1631-1637.
- لی، جی. پیادهسازی مبتنی بر دسترسی فضایی یک مدل داده توپولوژیکی برای موجودیتهای شهری سه بعدی. GeoInformatica 2004 ، 8 ، 235-262. [ Google Scholar ]
- یوان، دبلیو. Schneider, M. iNav: یک مدل ناوبری داخلی که از مسیریابی بهینه وابسته به طول پشتیبانی می کند. در مجموعه مقالات سیزدهمین کنفرانس بین المللی AGILE در علم اطلاعات جغرافیایی، گیماراس، پرتغال، 10-14 مه 2010.
- گوتز، ام. Zipf، A. تعریف رسمی یک نمودار مسیریابی سازگار با کاربر و طول بهینه برای محیط های داخلی پیچیده. ژئو اسپات. Inf. علمی 2011 ، 14 ، 119-128. [ Google Scholar ] [ CrossRef ]
- فلکل، پی. Obdrmalek، S. اجرای اسکلت مستقیم. در مجموعه مقالات چهاردهمین کنفرانس بهار گرافیک کامپیوتری، Budmerice، اسلواکی، 1998; ص 210-218.
- Weidmann, U. Transporttechnik der Fussgänger, Transporttechnische Eigenschaften des Fussgängerverkehrs (Literturauswertung) ; Institut für Verkehrsplanung، Transporttechnik، Strassen- und Eisenbahnbau (IVG) ETH Zurich: زوریخ، سوئیس، 1993. [ Google Scholar ]
- اور، اس. لمان، جی. Hellmann, S. LinkedGeoData: افزودن یک بعد فضایی به Web of Dat. در مجموعه مقالات هشتمین کنفرانس بین المللی وب معنایی (ISWC 2009)، واشنگتن، دی سی، ایالات متحده آمریکا، 25 تا 29 اکتبر 2009. صص 731-746.
- رسچ، بی. Zipf، A.; بروس-شنیویس، پی. بینات، ای. بوهر، ام. شهرهای زنده و خدمات شهری: میدان تنش چند بعدی بین فناوری، نوآوری و جامعه. در مجموعه مقالات چهارمین کنفرانس بینالمللی سیستمهای اطلاعات جغرافیایی پیشرفته اپلیکیشنها و خدمات (GEOPProcessing 2012)، والنسیا، اسپانیا، 30 ژانویه تا 4 فوریه 2012. ص 28-34.
- بوتس، ام. پرسیوال، جی. رید، سی. Davidson, J. OGC® Sensor Web Enabled: Overview and High Level Architecture. در مجموعه مقالات شبکه های ژئوسنسور: دومین کنفرانس بین المللی GSN، بوستون، MA، ایالات متحده آمریکا، 1-3 اکتبر 2006.
- اودن، ام. Zipf، A. OpenBuildingModels: Towards a Platform for Crowdsourcing Virtual 3D Cities. در مجموعه مقالات هفتمین ژئواینفو سه بعدی، شهر کبک، QC، کانادا، 16-17 مه 2012. پ. 17.
© 2012 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution ( http://creativecommons.org/licenses/by/3.0/ ) توزیع شده است.
بدون نظر