

خلاصه
روش اسکن لیزری زمینی به طور گسترده در پروژه های مدل سازی سه بعدی (3-D) استفاده می شود. با این وجود معمولاً برای اندازهگیری کامل اشکال به دادههای اندازهگیری از منابع دیگر نیاز دارد. در این مطالعه یک مدل سه بعدی از موزه تاریخی مولانا (مقبره مولانا) در قونیه، ترکیه با استفاده از تکنیکهای اندازهگیری پیشرفته ساخته شد. ساختمان توسط اسکنر لیزری زمینی (TLS) اندازه گیری شد. علاوه بر این، برخی از اشکال فضای داخلی توسط دوربین زمان پرواز اندازه گیری شد. بنابراین، یک مدل سه بعدی از ساختمان با ترکیب مجموعه داده های تمام اندازه گیری ها ایجاد شد. مدل ابر نقطهای با دقت 2.3 و 2.4 سانتیمتر برای اندازهگیریهای فضای باز و داخلی ایجاد شد و سپس در یک سیستم georeferenced ثبت شد.
کلید واژه ها:
اسکنر لیزری زمینی ; دوربین زمان پرواز ؛ ابر نقطه ; ثبت نام ؛ مدل سازی سه بعدی ; میراث فرهنگی
1. معرفی
دارایی های فرهنگی ساختارهای بسیار مهمی هستند که باید به عنوان میراث مشترک بشریت به نسل های بعدی منتقل شوند [ 1 ]. بنابراین، مستندسازی آنها جنبه مهمی از این فرآیند است. به طور خاص، ثبت شکل، ابعاد، رنگها و معناشناسی آنها ممکن است به معماران اجازه دهد تا فرمهای اصلی خود را بازیابی کنند و زمانی که از بین میروند آنها را بازسازی کنند [ 2 ]. هر نوع اطلاعات هندسی در مورد جسم (حجم، طول، مکان، مدل رقومی ارتفاع، مقاطع) را می توان از مدل های دیجیتال سه بعدی (3-D) بازیابی کرد [3 ، 4 ] . مدل سازی سه بعدی برای اهداف بسیاری مانند کاربردهای واقعیت مجازی، مدل اطلاعات ساختمان میراث (HBIM) انجام شده است [ 5 ،6 ، مستندسازی ساختارهای تاریخی، همانندسازی فیزیکی مصنوعات [ 7 ] و غیره. این نیاز به جمع آوری و ادغام داده های فضایی با چگالی بالا از سطح جسم دارد [ 8 ]. در دهه گذشته، با پیشرفت چشمگیر تکنیک های فتوگرامتری دیجیتال، اسکن و حسگرهای تصویربرداری سه بعدی، داده های فضایی سه بعدی اشیاء معماری را می توان بسیار سریع و دقیق اندازه گیری کرد. مقالات زیادی منتشر شده است که در آن رویکردهای مختلف مورد تجزیه و تحلیل و مقایسه قرار می گیرند [ 3 ، 9 ، 10 ، 11 ، 12 ]. در واقع، در بسیاری از موارد ادغام آنها در راه حل بهینه، یعنی تکنیک های تصویربرداری و اسکن، کاملا مکمل یکدیگر هستند.8 ]. اسکن لیزری زمینی باید زمانی ترجیح داده شود که هدف یک ساختار پیچیده است که مدلسازی آن با استفاده از روشهای اولیه هندسی دشوار است [ 13 ]. همچنین به طور فزاینده ای برای دیجیتالی کردن میراث فرهنگی استفاده می شود [ 10 ]. بسیاری از مطالعات در مورد پروژه های مستندسازی میراث با استفاده از تکنیک اسکن لیزری به تنهایی یا همراه با تکنیک های مبتنی بر تصویر انجام شده است [ 3 ، 14 ، 15 ]. به دلیل اندازه، شکل و انسداد جسم، معمولاً لازم است از چندین اسکن از مکانهای مختلف برای پوشاندن هر سطح استفاده شود [ 10 ]. ایستگاههای اسکن چندگانه را میتوان به روشی نسبتاً آسان با استفاده از تکنیکهای ثبت تلفیقی یکپارچه کرد [ 16 ,17 ، 18 ، 19 ]. از سوی دیگر، فتوگرامتری برای مدلسازی سطوحی که میتوانند به اشکال منظم تجزیه شوند، مناسبتر است، حتی اگر توسعه تکنیکهای تطبیق متراکم [ 20 ] این فرصت را به دست آورد که نتایج قابل مقایسه با اسکنرهای لیزری زمینی (TLS) در بازسازی اشیاء آزاد شکل [ 21 ، 22 ]. فتوگرامتری همچنین این مزیت را دارد که توسط حسگرهای نوری که میتوانند روی سیستمهای وسایل نقلیه هوایی بدون سرنشین (UAV) حمل شوند [ 23]]؛ چنین پلتفرم هایی برای جمع آوری داده ها بر روی پشت بام ها و سایر مکان های غیر قابل دسترس مفید هستند. اغلب یک دوربین در یک ابزار TLS ادغام می شود تا امکان ضبط معاصر اطلاعات شکل و رنگ سه بعدی را فراهم کند.
فناوری نوظهور برای اندازهگیری سه بعدی، تصویربرداری برد [ 24 ] است که میتواند با استفاده از دوربینهای زمان پرواز (ToF) کار کند. چنین حسگرهایی میتوانند فوراً مجموعهای از نقاط سه بعدی (ابر نقطه) را اندازهگیری کنند که هندسه ناحیه تصویر شده را نشان میدهد. با توجه به اندازه و وزن کوچک و قابلیت ضبط مستقیم اطلاعات سه بعدی، دوربین های ToF پتانسیل بالایی برای ایجاد طیف گسترده ای از کاربردها در آینده دارند. فرآیند اندازه گیری بر اساس ثبت پاسخ نور لیزر مدوله شده ساطع شده توسط خود سنسور است. [ 25 ] و [ 26] از دوربین ToF و مدل سازی مبتنی بر تصویر برای تجسم سه بعدی میراث فرهنگی بهره برداری کرد. از سوی دیگر، تأثیر تمایل جهت اندازه گیری و انواع مواد بر دقت اندازه گیری فاصله توسط [ 27 ] بررسی شده است.
در این مطالعه، مدل دیجیتال سه بعدی موزه مولانا (قونیه، ترکیه) با ترکیب داده های دوربین TLS و ToF ایجاد شد. بیرون ساختمان تنها با اسکنر لیزری اندازه گیری شد، در حالی که جزئیات داخلی با استفاده از هر دو تکنیک اندازه گیری شد. مدلهای مجازی و تصاویر ارتوفتو برای جزئیات مهم با بافتن تصویر بر روی ابر نقطه، پس از ایجاد یک سطح مش ایجاد شدند. بنابراین، عملکرد دوربین های ToF برای اسناد میراث فرهنگی (CH) از نظر کاربردهای جدید احتمالی ارزیابی شده است. علاوه بر این، دقت مدل ابر نقطه سه بعدی مورد تجزیه و تحلیل قرار گرفت.
2. مطالعه موردی: موزه مولانا
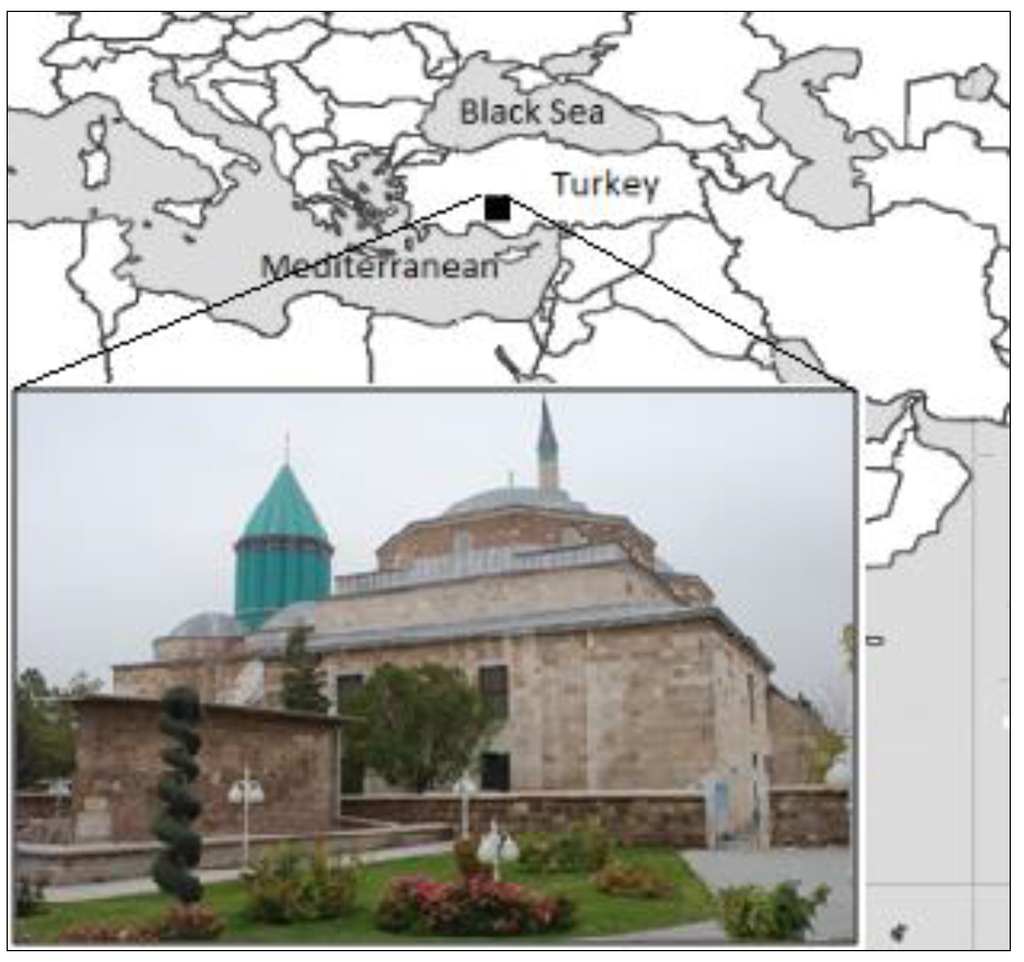
موزه مولانا در مرکز شهر قونیه ترکیه واقع شده است ( تصویر 1 ). این موزه در اطراف مقبره مولانا جلال الدین رومی که در دوره سلجوقیان (قرن سیزدهم) ساخته شده بود، راه اندازی شد. محل «لژ درویشی» که در حال حاضر به عنوان موزه مورد استفاده قرار میگیرد، باغ گل رز کاخ سلجوقیان بوده است. «لژ درویشی» توسط سلطان علاءالدین کیکوبات به سلطان العلماء بهاءالدین ولد، پدر مولانا هدیه شد. مقبره ای که گنبد سبز (کوبه هادرا) در آن قرار دارد با اجازه پسر مولانا سلطان ولد توسط معمار تبریزلی بدرتتین در سال 1274 پس از مرگ مولانا ساخته شد. از آن زمان، فعالیت های ساختمانی تا پایان قرن 19 ادامه یافت [ 28 ].
“لژ درویشی مولوی” و مقبره در سال 1926 به عنوان موزه با نام “موزه قونیه اسار آتیکا” شروع به کار کردند. در سال 1954 نمایشگاه و آرایش موزه اصلاح شد و نام موزه به موزه تغییر یافت. موزه مولانا [ 28 ]. قسمتی که مقبره در آن قرار دارد به ابعاد 30.5 × 30.5 متر و ابعاد صحن 68 × 84 متر است.
حیاط موزه از دروازه درویسان وارد می شود. در ضلع شمالی و غربی حیاط «اتاقهای درویشی» وجود دارد. ضلع جنوبی در کنار مطبه و مقبره حرم پاشا با دروازه هاموسان به قبرستان اوکلر ختم می شود. در شرق صحن، ساختمان اصلی قرار دارد که سماحانه، مسجد و قبور مولانا و اعضای خانواده اش در آن قرار دارد. فواره سرپوشیده و حوض «سبی عروس» رنگ بدیعی به حیاط می بخشد [ 28 ].
ورودی مقبره حضرتی مولانا از اتاق شعار است ( تصویر 2 ). اتاق شعار یک مکان مربع پوشیده از گنبد است. در کنار آن، آن سوی دروازه نقره ای، تالار مقبره (Huzur-ı Pir) برای ورود قرار دارد که با سه گنبد کوچک مسقف شده است. گنبد سوم گنبد پست نام دارد و در شمال به گنبد سبز میپیوندد. تالار مقبره در شرق، جنوب و شمال با دیوار بلندی احاطه شده است. قبر مولانا و پسرش سلطان ولد در زیر گنبد سبز قرار دارد [ 28 ].
سماحان به همراه مسجد توسط سلیمان اعظم در قرن شانزدهم ساخته شد. کرسی نعت در سماحانه، اتاق مطرب محل زندگی نوازندگان و محل تجمع زنان و مردان به حالت اولیه خود حفظ شده است.
از دروازه سراگ وارد مسجد می شود. همچنین گذرهایی با دری کوچک از بخش سماحانه و حضور پیر که در آن قبرها وجود دارد وجود دارد. در این بخش، مؤذن ماهویل و کرسی مسنویهان به شکل اصلی نگهداری می شوند.
3. مواد و روشها
نقشه برداری اسکن لیزری زمینی (TLS) برای ایجاد مدل های سه بعدی از ساختمان های تاریخی استفاده شده است. مراحل اصلی فرآیند مدلسازی سه بعدی با این تکنیک، ثبت ابر نقطهای، نگاشت بافت و ارجاع جغرافیایی است که ارتباط با سایر دادههای مکانی مرتبط را ضروری میکند. داده های فضایی با وضوح بالا اندازه گیری شده، مانند ابر نقطه، شکل جسم را به تصویر می کشد. علاوه بر این، داده های بافت باید پس از مش بندی، برای تجسم واقعی شی به ابر نقطه نگاشت شوند. از اسکنرهای لیزری زمینی برای اندازه گیری جزئیات بیرونی و داخلی استفاده می شود. علاوه بر این، در فضای داخلی، جزئیات پیچیده ای که نمی توان به طور کامل با TLS اندازه گیری کرد، توسط تصویربرداری ToF، که ابزاری مقرون به صرفه برای انجام این کار است، تصویربرداری شد. نمودار جریان در شکل 3روش انجام شده در اندازه گیری و ایجاد مدل سه بعدی موزه را نشان می دهد.
3.1. اسکن لیزری زمینی
در این مطالعه، اندازهگیریهای اسکن لیزری با دستگاه لیزر اسکنر Optech ILRIS-3D انجام شد. این دستگاه می تواند 2500 نقطه را در یک ثانیه به روش مستقیم ToF اندازه گیری کند. دقت اندازه گیری برد 7 میلی متر در 100 متر است. حداقل مرحله نمونه برداری آن (فاصله نقطه به نقطه) 0.001146 درجه (20 μrad) است. واگرایی پرتو 0.009740 درجه (170 μrad) است. داده های رنگی نقاط اندازه گیری شده را بر اساس دوربین یکپارچه (شش مگاپیکسل) ثبت می کند. حداکثر برد اندازه گیری دستگاه 1300 متر است. اندازه گیری های پانوراما را به ترتیب در 220 درجه عمودی و 360 درجه افقی میدان دید انجام می دهد [ 29 ].
توانایی ضبط دادههای دقت سانتیمتری در وضوح بالا و قابلیت پاسخ سریع ارائه شده توسط TLS، آن را به ابزاری ایدهآل برای اندازهگیری کمی ساختمانهای معماری تبدیل میکند. TLS ممکن است از روشهای ToF مستقیم، تغییر فاز و مثلثسازی برای اندازهگیری فاصله از ابزار تا نقاط جسم استفاده کند [ 30 ]. حداکثر برد اندازه گیری اسکنرهای لیزری تغییر فاز و زمان پرواز به ترتیب به فاصله پانصد تا چند هزار متری می رسد. آنها برای مدلسازی ساختمانها و اشیاء در فضای باز استفاده شده اند [ 31 , 32 , 33]. حداکثر برد ابزارها بر اساس روش مثلث بندی حدود هشت متر است. بنابراین، به طور کلی برای مدل سازی سه بعدی اجسام کوچک استفاده شده است.
دادههای اسکن لیزری یک مزیت برای ایجاد طراحی سه بعدی، مدلهای مجازی و تصاویر ارتوفتو سازههای معماری است. یکی از محدودیتهای اسکن لیزری، اندازهگیری از ایستگاههای ابزار ثابت زمینی است. بنابراین، اسکن های متعدد اغلب برای مدل سازی اشیاء بزرگ مورد نیاز است. در این راستا، تمام ابرهای نقطه ای باید در یک سیستم مرجع مشترک ثبت شوند. یکی دیگر از محدودیت های اسکن لیزری هزینه تجهیزات است که ممکن است به چند ده هزار دلار آمریکا برسد.
3.2. تصویربرداری زمان پرواز (ToF).
یک دوربین SwissRanger® SR4000 در این مطالعه استفاده شد [ 34 ، 35 ]. ابعاد آن 65 × 65 × 68 میلی متر و وزن آن 470 گرم است. اندازه سنسور تصویربرداری 144 × 176 پیکسل است و خطای اندازه گیری در حداکثر محدوده اندازه گیری آن 5 متر 1 سانتی متر است [ 36 ]. دوربین SR4000 50 فریم در ثانیه (fps) ضبط می کند. مختصات (xyz)، دامنه و مقادیر اطمینان در فایل های اندازه گیری ثبت می شوند. مبدا مختصات، محور نوری است و روی صفحه جلویی دوربین همپوشانی دارد ( شکل 4)). تمام فریم هایی که به صورت متوالی به دست می آیند در فایل های اندازه گیری جداگانه ثبت می شوند. در مورد دوربین ToF که در هنگام جمعآوری دادهها در موقعیت ثابت نگه داشته میشود، معمولاً بین اندازهگیریها (فریمها) ثبتشده از همان صحنه تفاوتهایی رخ میدهد. چنین خروجی ها به دلیل خطاهای سیستماتیک مختلفی است که نیاز به مدل سازی دارند و به دلیل نویز تصادفی. بنابراین، اگر بیش از یک اندازه گیری از یک منطقه تصویر ثبت شود، می توان یک فایل تصویری متوسط برای به حداقل رساندن نویز تولید کرد. با توجه به نتایج بهدستآمده توسط سایر محققان، تعداد بین 10 تا 30 فریم به طور کلی برای ایجاد مدلهای سه بعدی کافی است [ 37 ]. خود کالیبراسیون دوربین های ToF با تکنیک های مختلفی انجام شده است [ 38]. اثر خطای اعوجاج در اندازه گیری مختصات دوربین SR4000 با استفاده از تنظیمات کارخانه اصلاح شد. خروجی دوربین ToF یک ابر نقطه است. از سوی دیگر، اندازهگیری را میتوان با استفاده از دوربین ToF با ثبت صحنههای سه بعدی مختلف در یک سیستم مختصات واحد در حرکت انجام داد [ 39 ].
تکنیک های تصویربرداری ToF را می توان در حوزه های مختلف مورد استفاده قرار داد. کمک راننده، صفحه نمایش تعاملی و کاربردهای زیست پزشکی در [ 40 ] گزارش شده است. حتی اگر این فرآیندها را می توان با استفاده از اسکن لیزری یا فتوگرامتری انجام داد، استفاده از دوربین ToF باعث می شود که داده ها سریعتر و از نظر اقتصادی پایدارتر شود. هوسمن و همکاران [ 34 ] فتوگرامتری و دوربین ToF را از نظر میدان دید، تشخیص نقطه مزدوج و اندازه گیری مقایسه کرد. این دو روش در صنعت خودرو برای کمک به راننده، پیشگیری از تصادف، ترمز خودکار و تعیین حرکات در جاده مورد بررسی قرار گرفت. دوربین ToF برتر از روش فتوگرامتری یافت شد. بوهم و پتینسون [ 41] جهت گیری بیرونی ابرهای نقطه ToF را در رابطه با یک ابر نقطه مرجع TLS مورد بررسی قرار داد. علاوه بر این، تصویربرداری ToF برای مدلسازی شی [ 37 ، 42 ، 43 ]، اندازهگیری انحراف ساختاری [ 44 ، 45 ] و تشخیص حرکت انسان [ 46 ] استفاده شده است. علاوه بر این، اندازهگیری موبایل توسط تصویربرداری ToF برای تشخیص مسیر روباتهای متحرک [ 39 ] یا نقشهبرداری محیط داخلی [ 47 ] انجام شد.
4. فرآیند اکتساب داده
4.1. اندازه گیری سطوح بیرونی
سطوح بیرونی موزه با استفاده از اسکنر لیزری زمینی Optech ILRIS-3D اندازه گیری شد (به بخش 3.1 مراجعه کنید). وضوح نمونه برداری فضایی انتخاب شده در حدود 1.5 سانتی متر بر روی دیوارها، سقف و کف شیء بود. اندازه گیری درب ها به دلیل ریزه کاری ها و تزیینات به ترتیب با وضوح مکانی 1 سانتی متر و 3 میلی متر انجام شد. وضوح نمونه بر روی سقف (سطح بیرونی) 3 سانتی متر بود. هر اسکن حداقل 30 درصد با دیگران همپوشانی داشت تا به ثبت نام مشترک کمک کند. اندازهگیریهای اسکن لیزری سطوح بیرونی موزه از فاصله تقریباً 25 متری انجام شد. سقف از مناره های مسجد سلیمیه واقع در نزدیکی موزه اندازه گیری شد و فاصله اندازه گیری آن تقریباً 60 متر بود. بخش هایی از سقف که از آنجا قابل اندازه گیری نیست با بالا رفتن از سقف اندازه گیری می شود. تعداد کل 110 ایستگاه اسکن لیزری برای اندازه گیری سطوح بیرونی موزه راه اندازی شد.شکل 5 ). در مجموع 2980000 نقطه لیزر ثبت شد.
4.2. اندازه گیری محیط داخلی
فضاهای داخلی موزه توسط TLS با وضوح نمونه برداری مکانی 1 سانتی متر اندازه گیری شد. همان ابزار Optech ILRIS-3D در اینجا اعمال شد. جزئیات با وضوح نمونه برداری 3 میلی متر اندازه گیری شد. محیط داخلی از 72 ایستگاه ثبت و 5835000 نقطه اندازه گیری شد. از آنجایی که مدیریت موزه اجازه اسکن محل مقبره مولانا را نداد، اندازهگیری سقف این بخش انجام نشد. به استثنای این قسمت، از دوربین SR4000 ToF برای ثبت جزئیات کوچک در داخل موزه استفاده شده است. وزن سبک و امکان کنترل دوربین ToF به دستیابی به جزئیاتی که در موقعیتهایی که پوشش آن با TLS دشوار است کمک کرد. برخی از جزئیات در Huzur-ı Pir و مسجد توسط دوربین SR4000 از ایستگاه های مختلف به منظور همپوشانی اندازه گیری شد. ثبت ابر نقطه و ادغام داده های TLS و ToF در نشان داده شده استبخش 5 .
4.3. تهیه تصویر
برای ایجاد یک مدل واقعیت مجازی (VR) از موزه، به نگاشت بافت فوتورئالیستی نیاز بود [ 48 ]. با توجه به وضوح پایین سنسورهای تصویربرداری تعبیه شده در دوربین TLS و ToF اتخاذ شده، تصاویر مستقل صرفاً با هدف بافت عکس به دست آمد.
یک دوربین رفلکس تک لنز (SLR) نیکون D80 (آرایه پیکسل 3872 × 2592، اندازه پیکسل 6.1 میکرومتر، فاصله کانونی 24 میلی متر)، که از قبل کالیبره شده بود [49]، برای گرفتن تصویر استفاده شد . جزئیاتی که قرار است بافت شوند از موقعیت جلو عکس گرفته شده اند تا از اعوجاج پرسپکتیو و بی نظمی در رنگ و شدت کاسته شود. روشنایی تصویر به منبع نور و موقعیت دوربین بستگی دارد. بنابراین، تصاویر باید از موقعیت های مناسب گرفته شوند [ 50 ، 51 ].
5. ایجاد مدل 3D Point Cloud
5.1. ثبت اندازه گیری اسکنر لیزری
ثبت ابرهای نقطه اسکنر لیزری و ایجاد و ویرایش سطح مثلثی (مش) با نرم افزار PolyWorks® [ 52 ] انجام شد . ابتدا فایل های اندازه گیری ثبت شده از TLS با نرم افزار Optech Parser (ver.4.2.7.2) به فرمت فایل PIF تبدیل شدند.
ثبت ابرهای نقطه در ماژول PolyWorks® IMAlign® با روش نزدیکترین نقطه تکراری (ICP) انجام شد ( برای بررسی به Pomerleau و همکاران [ 53 ] مراجعه کنید). ابر نقطهای که دارای بیشترین همپوشانی نسبت به سایر اسکنها بود به عنوان مرجع انتخاب شد. اسکن هایی که مستقیماً با آن همپوشانی داشتند در سیستم مختصات آن ثبت شدند. پس از ثبت این گروه از اسکن ها به مرجع، روند تا شامل تمام اسکن های باقی مانده ادامه یافت.
به منظور اعمال ICP، پارامترهای ثبت اولیه از اندازه گیری دستی حداقل سه نقطه مشترک (از جزئیات طبیعی مانند گوشه ها، لبه ها یا جزئیات متمایز) به دست آمد. سپس ثبت جریمه با روش ICP اعمال شد. پس از ثبت تمام اسکن ها به این روش، ثبت جهانی انجام شد تا خطاهای تجمعی ناشی از ثبت های متوالی به حداقل برسد. در ثبت جهانی، ثبت تمامی اسکن ها با توجه به مجموعه داده های مرجع به طور همزمان انجام شد. حداکثر ریشه میانگین مربعات خطا (RMSE) ثبت اسکن پس از ثبت جهانی 2.5 سانتی متر بود. در مرحله اول، ابرهای TLS در فضای باز ( شکل 6 ) و فضای داخلی ( شکل 7)) محیط ها به طور مستقل ثبت شدند. سپس، اینها با مرحله ارجاع جغرافیایی که در بخش 6 نشان داده شده است، ترکیب شدند .
5.2. ثبت ابرهای نقطه دوربین ToF
5.2.1. مورد 1: اندازه گیری محراب در بخش Huzur-ı Pir
در بخش Huzur-ı Pir، محراب در کنار طاقچه نقره ای با استفاده از دوربین SR4000 ToF اندازه گیری شد. 50 فریم از فاصله 4.5 متری در دو ایستگاه ثبت شد. این فاصله اندازهگیری منجر به میانگین تفکیک مکانی نمونهبرداری از شی 2.0 سانتیمتر (رزولوشن زاویهای 0.24 درجه) شد. زمان ادغام روی 30 (واحد دلخواه است) و فرکانس مدولاسیون روی 15 مگاهرتز تنظیم شد. میانگین فایل های اندازه گیری ( شکل 8 ) فریم های خام هر دو ایستگاه با استفاده از Matlab ایجاد شد .کد ابرهای نقطه ToF نقاط اشتباه بیشتری دارند، به خصوص نزدیک به لبه قاب. بدین ترتیب قسمت هایی که در لبه دارای نقاط خطا هستند از ابرهای نقطه حذف شدند. سپس ابر نقطه دوم با استفاده از ICP در سیستم مختصات ابر نقطه اول (مرجع) با انحراف معیار 1.9 سانتی متر ثبت شد.
5.2.2. مورد دوم: اندازه گیری محراب در مسجد
محراب مسجد با دوربین SR4000 ToF از سه ایستگاه مختلف تصویربرداری شده است. چهل تصویر از هر ایستگاه ثبت شد ( شکل 9 ). فاصله بین ایستگاه دوربین و محراب اندازه گیری شده در سه نقطه دید تقریباً 4 متر بود. میانگین وضوح نمونه برداری فضایی شی در این محدوده اندازه گیری 1.7 سانتی متر بود. ابرهای نقطه دوم و سوم با استفاده از ICP به ترتیب با انحراف معیار 1.6 و 1.7 سانتی متر با فرض اسکن اول به عنوان مرجع ثبت شدند.
5.3. ادغام دوربین ToF و داده های TLS
دروازه بین مقبره و سماحانه با هر دو روش اسکن لیزری و تصویربرداری ToF اندازه گیری شد. بنابراین، اندازه گیری ها باید یکپارچه شوند. نقشه برداری اسکن لیزری با وضوح فضایی متوسط 1.2 سانتی متر بر روی سطح جسم انجام شد، در حالی که تصویربرداری ToF وضوح فضایی تقریباً 1 سانتی متر را ارائه داد. پس از ایجاد فایل تصویری متوسط از چندین فریم تصویر شده توسط دوربین ToF، هر دو ابر نقطه با استفاده از ICP یکپارچه شدند ( شکل 10 ). RMSE ثبت منجر به وضوح 1.9 سانتی متر شد.
6. ارجاع جغرافیایی و ارزیابی دقت مدل سه بعدی
ما ژئو ارجاع نهایی هر ابر نقطه ای را در یک چارچوب مرجع مشترک و ارزیابی دقت مدل سه بعدی گروه بندی کردیم زیرا هر دو بر اساس اندازه گیری یک مجموعه مستقل از نقاط کنترل (CP) بودند. اینها شامل سی و شش نقطه کنترلی بودند که به خوبی در ابرهای نقطه TLS/ToF قابل تشخیص بودند ( شکل 11).). یک شبکه سه بعدی ژئودتیک محلی برای اندازه گیری مختصات CP راه اندازی شد. برای این منظور از یک تئودولیت Topcon GPT-3007N استفاده شد که به لطف فاصله یاب یکپارچه بدون بازتابنده امکان اندازه گیری مختصات CP 3-D را فراهم کرد. با توجه به دقت اندازهگیری ذاتی چنین ابزاری، خطای مربوط به تعیین ایستگاههای شبکه و استفاده از حالت بدون بازتاب، دقت CPs در همه جهات بهتر از 5± میلیمتر ارزیابی شده است [54 ] . این دقت بالاتر از نقاط سه بعدی تصویربرداری TLS و ToF است.
ابرهای نقطهای داخلی و خارجی با استفاده از تبدیلهای جسم صلب سه بعدی بر اساس CPها، که مختصات آن در مدل سهبعدی شناسایی شد، جغرافیایی ارجاع و تراز شدند. پس از ارجاع جغرافیایی، ارزیابی دقت با استفاده از مجموعه ای از نقاط چک (ChP) متشکل از آن دسته از CP هایی که برای ارجاع جغرافیایی پذیرفته نشده بودند، انجام شد. متریک مورد استفاده برای ارزیابی دقت، RMSE باقیمانده های سه بعدی در ChP ها بود ( جدول 1). میانگین باقیمانده مختصات ChP کمتر از یک سانتی متر و انحراف معیار آنها حدود 2 سانتی متر بود. این نتایج در مقایسه با میانگین فاصله نقاط (از 1 سانتی متر تا 3 سانتی متر) داده های اسکن لیزری نتایج بسیار خوبی هستند. از سوی دیگر، یک ارزیابی کیفیت دقیق با مقایسه فواصل CPs بین مختصات در ابر نقطه با آنهایی که در اندازهگیریهای زمینشناسی انجام شد. در سطح جهانی، دو زیر مجموعه 16 و 20 CP به ترتیب برای ارزیابی کیفیت ابرهای نقطه داخلی و خارجی انتخاب شدند. نتایج میانگین دقت بالای مدلسازی سه بعدی را نشان داد ( جدول 2 و جدول 3 ). با توجه به این نتایج، دقت مدل ابر نقطه سه بعدی به دست آمده مثبت ارزیابی شد.
7. نقشه برداری بافت
اگرچه مدل ابر نقطه سه بعدی شکل جسم اندازه گیری شده را نشان می دهد، اما داده های بافتی برای ارائه یک تجسم واقعی ندارد. هنگامی که دادههای بافت جسم درخواست میشود علاوه بر دادههای هندسی ثبت شوند، پس از مشبندی، باید یک بافت فوتورئالیستی روی ابر نقطه ترسیم شود تا سطح پیوستهای که نقاط گسسته را به هم متصل میکند، به دست آورد. بنابراین، داده های هندسی و بافت را می توان با هم تجسم کرد. برای ترسیم بافت، ابتدا سطح مدل مثلثی (مش) باید از ابر نقطه خام استخراج شود [ 48 ]. مدل مثلثی شکل مدل را با مثلث های مجاور یکدیگر از طریق سطح جسم به تصویر می کشد.
تکسچر کردن تصاویر روی شبکه مستلزم دانش جهت گیری داخلی دوربین و جهت گیری بیرونی هر ایستگاه است [ 49]]. اولی را می توان از کالیبراسیون اولیه دوربین به دست آورد. دومی ممکن است با پیروی از یکی از روش های فتوگرامتری برای جهت گیری تصویر محاسبه شود. در این مورد، وجود چندین تصویر، که به خوبی در یک شبکه فتوگرامتری به هم متصل نیستند، ما را بر آن داشت تا روش برداشت فضایی را برای محاسبه جهت بیرونی به روشی مستقل برای هر ایستگاه دوربین ترجیح دهیم. این کار، از لحاظ نظری، نیازمند محاسبه حداقل سه نقطه کنترل متناظر (CP) قابل مشاهده در تصویر و مش بود. همچنین می توان از نقاط کنترل زمینی (GCP) استفاده کرد. با توجه به برخی مشکلات عددی (مدلهای برداشت فضایی غیرخطی هستند)، معمولاً روشهای محاسباتی به نقاط بیشتری نیاز دارند، واقعیتی که ممکن است افزونگی مشاهدات را نیز افزایش دهد.
سطح مثلثی در نرم افزار PolyWorks® ایجاد شده است . برخلاف بسیاری از بستههای نرمافزاری که فرآیند مثلثسازی 2.5 بعدی را پیادهسازی میکنند، در PolyWorks® یک مثلثسازی دادههای سه بعدی واقعی را میتوان انجام داد. پس از ایجاد مدل مش، ویرایش برای رفع برخی مشکلات باقیمانده مورد نیاز بود. تصویر مثلثی شکل گنبد متعلق به سماحانه در شکل 12 قابل مشاهده است .
از نرم افزار PI-3000 (نسخه 21/3) برای ترسیم بافت عکس بر روی مدل مثلثی موزه استفاده شد. مدل مثلثی از PolyWorks با استفاده از فرمت DXF به نرم افزار PI-3000 منتقل شد. تصاویر ثبت شده توسط دوربین نیکون D80 نیز به نرم افزار وارد شد. عکس هایی که برای نگاشت بافت مورد استفاده قرار خواهند گرفت به صورت تعاملی انتخاب شدند. آنها در سیستم مختصات شی (ابر نقطه) با نقاط مزدوج انتخاب شده از عکس و ابر نقطه ثبت شدند. سپس، مدلهای مجازی سه بعدی و تصاویر ارتوفتو [ 55 ] با نگاشت بافتهای عکس بر روی مدل مثلثی ایجاد شدند ( شکل 13 ). به همین ترتیب، مدل های مثلثی و نقشه بافتی محراب ها در بخش حضور پیر و درب مسجد ایجاد شد.شکل 14 ).
8. نتیجه گیری
در این مطالعه، یک مدل سه بعدی از موزه مولانا (قونیه، ترکیه) با استفاده از مجموعه داده های تصویربرداری TLS و ToF ایجاد شد. در حالی که استفاده از TLS برای مدلسازی سه بعدی میراث فرهنگی تا حد زیادی در پروژههای انجامشده مؤثر بوده است، در اینجا، قابلیت استفاده از دوربین ToF در مطالعات مستندسازی سازههای تاریخی مورد بررسی قرار گرفت. مناطقی که نمی توان با اسکن لیزری اندازه گیری کرد توسط یک دوربین ToF اندازه گیری شد و یک مدل ابر نقطه منحصر به فرد نهایی با ادغام هر دو مجموعه داده تولید شد. در واقع دوربین های ToF به دلیل وزن سبک و قابلیت ضبط تصاویر در هنگام حرکت به راحتی قابل استفاده هستند. با این حال، محدوده اندازه گیری کوتاه دوربین های ToF را می توان به عنوان نقطه ضعف این فناوری در نظر گرفت، حتی اگر این محدودیت در سنسورهای آینده برطرف شود. علاوه بر این، از آنجایی که ابر نقطه دوربین ToF هیچ رنگی ندارد، انتخاب جزئیات دشوار است. این کمبودها استفاده از دوربین ToF را در مطالعات مدل سازی کامل سه بعدی محدود می کند.
وضوح نمونه برداری فضایی شی در حداکثر فاصله اندازه گیری از دوربین تقریباً 2 سانتی متر است. ابرهای نقطه ای ثبت شده توسط دوربین های ToF را می توان با استفاده از ثبت ICP ترکیب کرد. علاوه بر این، ادغام ابرهای نقطه ای از دوربین ToF و اسکنر لیزری نیز می تواند با استفاده از ICP انجام شود.
روش اسکن لیزری زمینی که نزدیک به بیست سال است برای مدلسازی سازههای تاریخی مورد استفاده قرار میگیرد، به عنوان یک روش اندازهگیری کارآمد در زمینه مستندسازی میراث فرهنگی ثابت شده است. اسکن لیزری سطوح داخلی و خارجی در مدت شش روز انجام شد. اندازه گیری جزئیات سقف و مجتمع داخلی به ویژه زمان بر بود. از سوی دیگر، داده های در مقیاس بزرگ باری بر ظرفیت کامپیوتر است. رایانهای که برای پردازش دادهها استفاده میشد دارای پردازنده Intel Core i5-2400 CPU و 8 گیگابایت رم بود. این فرآیند حدود پنج روز برای تکمیل نیاز داشت. در پایان این پروژه تمامی جزئیات موزه مولانا اندازه گیری و مدل مجازی سه بعدی ساخته شد. ارزیابی کیفیت نشان داد که مدلهای ابر نقطهای با وجود تعداد زیاد اندازهگیریها و ساختار پیچیده ساختمان با دقت بالایی ایجاد شدهاند. از سوی دیگر، ژئو ارجاع اندازه گیری ها با استفاده از تعداد کافی نقاط کنترل با دقت بالا انجام شد. علاوه بر این، نگاشت بافت با تصاویر دیجیتالی ثبت شده توسط یک دوربین SLR مستقل امکان افزایش محتوای اطلاعاتی مدل سه بعدی نهایی را فراهم کرد.
منابع
- Seker، DZ; الکان، م. Büyüksalih، G. کوتوغلو، ش. کهیا، ی. Akcin، H. Kültürel Mirasın Kaydı، Analizi، Korunması ve Yaşatılmasına Yönelik Bir Bilgi ve Yönetim Sisteminin Geliştirilmesi، Örnek Uygulama: Safranbolu Tarihi Kenti ; شورای تحقیقات علمی و فناوری ترکیه (TUBITAK): آنکارا، ترکیه، 2011. [ Google Scholar ]
- گرون، ا. رموندینو، اف. Zhang, L. سند بازسازی فتوگرامتری بودای بزرگ بامیان، افغانستان. فتوگرام ضبط 2004 ، 19 ، 177-199. [ Google Scholar ] [ CrossRef ]
- Remondino، F. ثبت هریتیج و مدلسازی سه بعدی با فتوگرامتری و اسکن سه بعدی. Remote Sens. 2011 ، 3 ، 1104-1138. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رموندینو، اف. Boehm, J. Editorial: بخش تم، مدل سازی سه بعدی زمینی. ISPRS J. Photogram. Remote Sens. 2013 ، 76 ، 31-32. [ Google Scholar ] [ CrossRef ]
- مورفی، ام. مک گاورن، ای. پاویا، S. مدل سازی اطلاعات ساختمان تاریخی-افزودن هوش به بررسی های لیزری و تصویری معماری کلاسیک اروپا. ISPRS J. Photogram. Remote Sens. 2013 ، 76 ، 89-102. [ Google Scholar ] [ CrossRef ]
- اورنی، دی. برومانا، آر. توره، SD؛ بنفی، ف. بارازتی، ال. Previtali, M. Survey به HBIM تبدیل شد: بازسازی و کار مربوط به کلیسای کولماجیو پس از زلزله (L’Aquila). در مجموعه مقالات سمپوزیوم پنجم کمیسیون فنی ISPRS، ریوا دل گاردا، ایتالیا، 23 تا 25 ژوئن 2014. صص 267-273.
- اسکایونی، م. واسنا، جی. کلوداس، تی. Pfeil، JU Automatic DEM با استفاده از سیستم دیجیتال InduSCAN: برنامهای برای آثار هنری کلیسای جامع میلان که برای تحقق نسخههای مرمر فیزیکی نهایی شده است. در مجموعه مقالات هجدهمین کنگره ISPRS، وین، اتریش، 9 تا 19 ژوئیه 1996. ص 581-586.
- کیدزیرسکی، م. Fryskowska، A. روشهای ادغام ابرهای نقطه اسکن لیزری در مدلسازی ساختمان سه بعدی دقیق. اندازه گیری 2015 ، 74 ، 221-232. [ Google Scholar ] [ CrossRef ]
- بلیز، اف. Beraldin, JA تحولات اخیر در تصویربرداری لیزری سه بعدی چند مدلی که در میراث فرهنگی اعمال شده است. ماخ Vis. Appl. 2006 ، 17 ، 395-409. [ Google Scholar ] [ CrossRef ]
- الحکیم، س. گونزو، ال. ولتولینی، اف. گیراردی، س. ریزی، ع. رموندینو، اف. Whiting, E. مدلسازی سه بعدی جزئی قلعه ها. بین المللی جی آرچیت. محاسبه کنید. 2007 ، 5 ، 200-220. [ Google Scholar ] [ CrossRef ]
- بارازتی، ال. بیندا، ال. اسکایونی، م. تارانتو، ص. اهمیت بررسی هندسی برای تحلیلهای ساختاری و طراحی برای مداخله در ساختمانهای CH: کاربرد در معبد پسر من در ویتنام. در مجموعه مقالات سیزدهمین کنفرانس بین المللی تعمیر، حفاظت و تقویت بناهای سنتی و بناهای تاریخی، Wroclaw، لهستان، 2-4 دسامبر 2009. صص 135-146.
- السادیک، بی. گرکه، ام. Vosselman, G. طراحی شبکه دوربین خودکار برای مدلسازی سه بعدی اشیاء میراث فرهنگی. J. Cult. هریت. 2013 ، 14 ، 515-526. [ Google Scholar ] [ CrossRef ]
- گرسن مایر، پ. هانکه، ک. کاربردهای میراث فرهنگی. در اسکن لیزری هوابرد و زمینی ؛ Vosselman, G., Maas, H.-G., Eds.; Whittles Publishing: Caithness، UK، 2010; ص 271-290. [ Google Scholar ]
- آکجا، دی. رموندینو، اف. نواک، دی. هانوش، تی. شروتر، جی. Gruen, A. ضبط و مدلسازی اشیاء میراث فرهنگی با سیستمهای طرحریزی نور ساختاریافته کد شده. در مجموعه مقالات دومین کنفرانس بین المللی سنجش از دور در باستان شناسی، رم، ایتالیا، 4-7 دسامبر 2006; صص 375-382.
- گرسن مایر، پ. آلبی، ای. عسلی، پ. پویتوین، وی. هولو، جی اف. اسمیکیل، ای. مستندسازی دقیق در میراث فرهنگی با ادغام TLS و داده های فتوگرامتری با وضوح بالا. Proc. SPIE 2011 . [ Google Scholar ] [ CrossRef ]
- آلبا، م. Scaioni، M. مقایسه تکنیکهای زمینی ارجاع دادههای اسکن لیزری به کار رفته در مدلسازی سه بعدی میراث فرهنگی. در مجموعه مقالات 3D-ARCH، زوریخ، سوئیس، 12-13 ژوئیه 2007. صص 1-8.
- سالوی، جی. ماتابوش، سی. فوفی، د. Forest, J. مروری بر روشهای ثبت تصاویر محدوده اخیر با ارزیابی دقت. تصویر Vis. محاسبه کنید. 2007 ، 25 ، 578-596. [ Google Scholar ] [ CrossRef ]
- Aquilera، DG; گونزالوز، روابط عمومی؛ Lahoz, JG روشی خودکار برای ثبت نام مشترک اسکنرهای لیزری زمینی و دوربین های دیجیتال. ISPRS J. Photogramm. Remote Sens. 2009 , 64 , 308-316. [ Google Scholar ]
- Altuntas, C. ثبت خودکار دادههای اسکن لیزری سهبعدی از ساختمانهای تاریخی توسط تصاویر دو بعدی ایجاد شده به صورت جفتی. انتخاب کنید مهندس 2014 ، 53 ، 1-6. [ Google Scholar ] [ CrossRef ]
- Haala, N. چشم انداز الگوریتم های تطبیق تصویر متراکم. در مجموعه مقالات هفته فتوگرامتری 2013، اشتوتگارت، آلمان، 9 تا 13 سپتامبر 2013. ص 271-284.
- بارازتی، ال. اسکایونی، م. Remondino، F. جهت گیری و مدل سازی سه بعدی از تصاویر زمینی بدون نشانگر: ترکیب دقت با اتوماسیون. فتوگرام ضبط 2010 ، 25 ، 356-381. [ Google Scholar ] [ CrossRef ]
- رموندینو، اف. اسپرا، ام جی; نوچرینو، ای. منا، اف. Nex، F. وضعیت هنر در تطبیق تصویر با چگالی بالا. فتوگرام ضبط 2014 ، 29 ، 144-166. [ Google Scholar ] [ CrossRef ]
- کلومینا، آی. Molina, P. سیستم های هوایی بدون سرنشین برای فتوگرامتری و سنجش از دور: یک بررسی. ISPRS J. Photogramm. Remote Sens. 2014 ، 92 ، 79-97. [ Google Scholar ] [ CrossRef ]
- رموندینو، اف. Stoppa, D. ToF Range-Imaging Cameras ; Springer: برلین، آلمان، 2013. [ Google Scholar ]
- رینادو، اف. چیابراندو، اف. نکس، اف. پیاتی، دی. ابزارها و فناوری های جدید برای بررسی میراث فرهنگی: ادغام کامل بین ابرهای نقطه ای و فتوگرامتری دیجیتال. در میراث دیجیتال ; Ioannides، M.، Ed. Springer: برلین، آلمان، 2010; صص 56-70. [ Google Scholar ]
- چیابرو، اف. دوربین های Rinaudo، F. ToF برای بررسی های معماری. در دوربین های TOF Range-Imaging ; Remondino, F., Stoppa, D., Eds. Springer: برلین، آلمان، 2013; صص 139-164. [ Google Scholar ]
- رینادو، اف. چیابراندو، اف. کالیبراسیون و ارزیابی دوربین برد برای بررسی متریک میراث فرهنگی. در مجموعه مقالات بیست و چهارمین سمپوزیوم بین المللی CIPA، استراسبورگ، فرانسه، 2 تا 6 سپتامبر 2013. ص 271-276.
- وزارت فرهنگ و گردشگری جمهوری ترکیه در دسترس آنلاین: http://www.kulturvarliklari.gov.tr/TR,43870/konya—mevlana-muzesi.html (دسترسی در 3 دسامبر 2012).
- مشخصات GEO3D Optech Ilris-3D. در دسترس آنلاین: http://www.geo3d.hr/download/ilris_3d/brochures/ilris_36d.pdf (دسترسی در 10 ژانویه 2013).
- ووسلمن، جی. اسکن لیزری Maas، HG در هوا و زمین . Whittles Publishing: Caithness، UK، 2010. [ Google Scholar ]
- کلارک، جی. Robson, S. دقت اندازه گیری های انجام شده با اسکنر لیزری Cyrax 2500. Surv. Rev. 2004 , 37 , 626-638. [ Google Scholar ] [ CrossRef ]
- وزوچنیک، آر. آمبروژیچ، تی. استرل، او. بیلبان، جی. فایفر، ن. Stopar, B. استفاده از فناوری اسکن لیزری زمینی برای نظارت طولانی مدت تغییر شکل با دقت بالا. Sensors 2009 , 9 , 9873-9895. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Gikas, V. اسکن لیزری سه بعدی زمینی برای مستندات هندسی و مدیریت ساخت و ساز تونل های بزرگراه در حین حفاری. Sensors 2012 , 12 , 11249-11270. [ Google Scholar ]
- هاسمن، اس. رینگبک، تی. Hagebeuker، B. بررسی عملکرد سیستمهای بینایی 3D ToF در مقایسه با سیستمهای بینایی استریو. در Stereo Vision ; بهاتی، ا.، اد. InTech: Rijeka، کرواسی، 2008; صص 103-120. [ Google Scholar ]
- پیاتی، دی. دوربین های Rinaudo، F. SR-4000 و CamCube 3.0 Time of Flight (ToF): تست ها و مقایسه. Remote Sens. 2012 , 4 , 1069–1089. [ Google Scholar ]
- MesaImaging، SwissRanger SRSR4000 نمای کلی. در دسترس آنلاین: http://www.mesa-imaging.ch/products/sr4000/ (در 9 مارس 2015 قابل دسترسی است).
- Piatti, D. دوربین های زمان پرواز: تست ها، کالیبراسیون و ثبت چند فریم برای بازسازی خودکار اشیاء سه بعدی. دکتری پایان نامه، Politecnico di Torino، تورینو، ایتالیا، 2010. [ Google Scholar ]
- لیچتی، دی. Qi، X. احمد، T. خود کالیبراسیون دوربین با جبران پراکندگی. ISPRS J. Photogramm. Remote Sens. 2012 ، 74 ، 101-109. [ Google Scholar ] [ CrossRef ]
- Valverdea، SA; کاستیوآ، جی سی. Caballeroa، ساختمان نقشه ربات متحرک AF از دوربین زمان مبارزه. سیستم خبره Appl. 2012 ، 39 ، 8835-8843. [ Google Scholar ] [ CrossRef ]
- اوگیه، تی. بوتگن، بی. لوستنبرگر، اف. بکر، جی. Rüegg، B. Hodac، A. SwissRanger SR3000 و اولین تجربیات مبتنی بر دوربین های کوچک 3D-ToF. در مجموعه مقالات روز تحقیق تصویربرداری 1، زوریخ، سوئیس، 8 تا 9 سپتامبر 2005. صص 97-108.
- بوهم، جی. پتینسون، تی. دقت جهت گیری بیرونی برای دوربین برد. در مجموعه مقالات کمیسیون ISPRS V Mid-Term Symposium، نیوکاسل آپون تاین، بریتانیا، 21-24 ژوئن 2010. صص 103-108.
- کوی، ی. شوان، اس. چان، دی. ترون، اس. اسکن سه بعدی شکل Theobalt، C. با دوربین زمان پرواز. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو (CVPR)، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 13 تا 18 ژوئن 2010. صص 1173–1180.
- آلتونتاس، سی. Yildiz, F. ثبت داده های ابر نقطه ای از دوربین تصویربرداری برد. Géod. کارتوگر. 2013 ، 39 ، 106-112. [ Google Scholar ] [ CrossRef ]
- لیچتی، دی. جمشو، س. الحلاوانی، SI; لاهامی، اچ. چاو، جی. چان، TO; El-Badry, M. اندازه گیری انحراف ساختاری با دوربین برد. ASCE J. Surv. مهندس 2012 ، 138 ، 66-76. [ Google Scholar ] [ CrossRef ]
- Qi، X. لیچتی، دی. البدری، م. چان، TO; الحلاوانی، SI; لاهامی، اچ. Steward, J. اندازهگیری انحراف دینامیکی ساختاری با دوربینهای برد. فتوگرام ضبط 2014 ، 29 ، 89-107. [ Google Scholar ] [ CrossRef ]
- گاناپاتی، وی. پلاژمن، سی. کولر، دی. Thrun, S. ضبط حرکت در زمان واقعی با استفاده از یک دوربین تنها در زمان پرواز. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو (CVPR)، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 13 تا 18 ژوئن 2010. صص 755-762.
- کلمنته، لس آنجلس; دیویسون، ای جی؛ رید، شناسه; نیرا، جی. Tardos, JD نقشه برداری حلقه های بزرگ با یک دوربین دستی. در مجموعه مقالات رباتیک: علم و سیستم ها، آتلانتا، GA، ایالات متحده آمریکا، 27-30 ژوئن 2007.
- پرویتالی، م. بارازتی، ال. Scaioni, M. روشی خودکار و دقیق برای نگاشت بافت از تصاویر. در مجموعه مقالات هجدهمین کنفرانس بین المللی سیستم های مجازی و چند رسانه ای (VSMM)، میلان، ایتالیا، 2 تا 5 سپتامبر 2012. صص 591-594.
- لومان، تی. رابسون، اس. کایل، اس. Böhm, J. فتوگرامتری برد نزدیک: تکنیک های تصویربرداری سه بعدی . Walter De Gruyter: برلین، آلمان، 2013; پ. 702. [ Google Scholar ]
- یو، ی. Debevec، P. مالک، ج. هاوکینز، تی. روشنایی جهانی معکوس: بازیابی مدل های بازتاب صحنه های واقعی از عکس ها. در مجموعه مقالات بیست و ششمین کنفرانس سالانه گرافیک کامپیوتری و تکنیک های تعاملی، لس آنجلس، کالیفرنیا، ایالات متحده آمریکا، 8 تا 13 اوت 1999. ص 215-227.
- یانگ، اچ. ولش، جی. Pollefeys، M. Illumination مبتنی بر مدل فشرده ردیابی اشیاء سه بعدی و اصلاح بافت. در مجموعه مقالات سومین سمپوزیوم بین المللی در مورد پردازش داده های سه بعدی، تجسم و انتقال (3DPVT’06)، چپل هیل، NC، ایالات متحده، 14-16 ژوئن 2006. صص 869-876.
- نرم افزار PolyWorks، نسخه 9.0 ، InnovMetric Software Inc.: Ville de Québec، QC، کانادا، 2007.
- پومرلو، اف. کولاس، اف. سیگوارت، آر. Magnenat، S. مقایسه انواع ICP در مجموعه داده های دنیای واقعی. Auton. ربات. 2013 ، 34 ، 133-148. [ Google Scholar ] [ CrossRef ]
- شوفیلد، دبلیو. Breach, M. Engineering Surveying , 6th ed.; Butterworth-Heinemann: آکسفورد، انگلستان، 2007. [ Google Scholar ]
- یاستیکلی، ن. مستندسازی میراث فرهنگی با استفاده از فتوگرامتری دیجیتال و اسکن لیزری. J. Cult. هریت. 2007 ، 8 ، 423-427. [ Google Scholar ] [ CrossRef ]
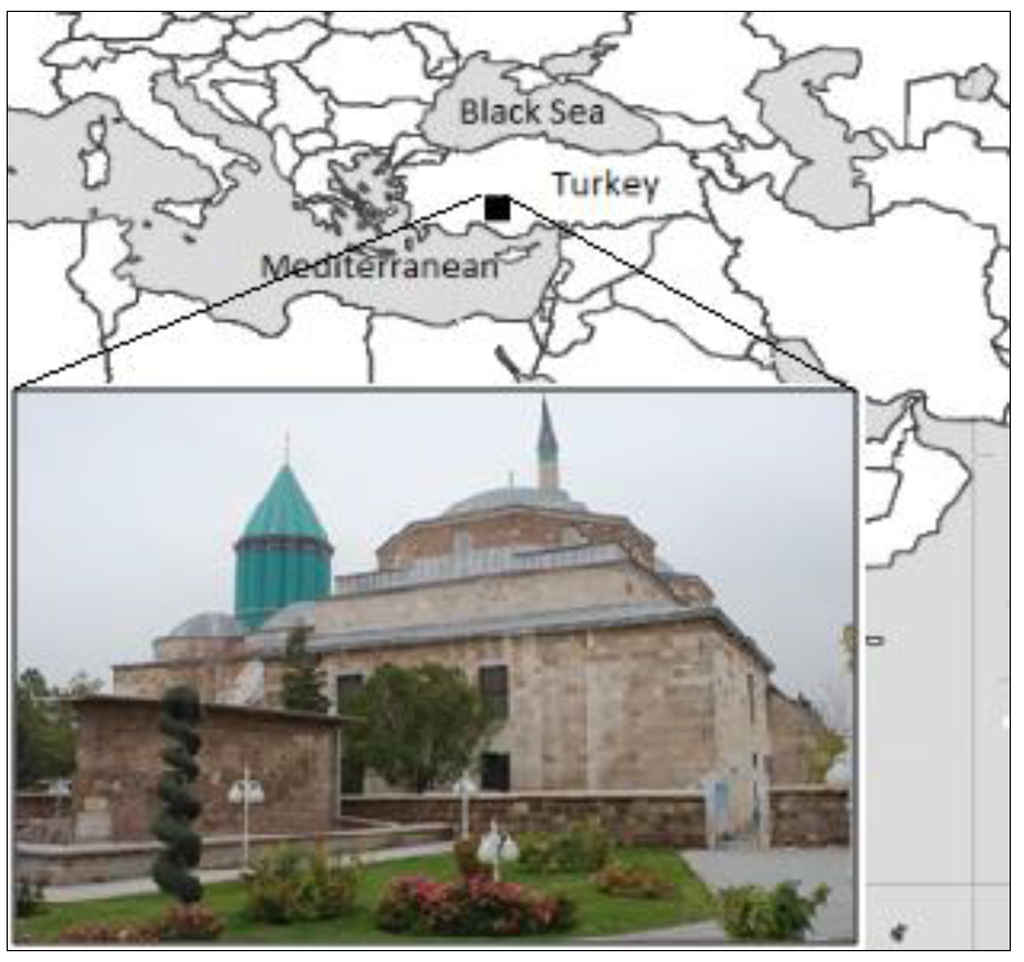
شکل 1. موزه مولانا.

شکل 2. پلان زمین موزه مولانا.
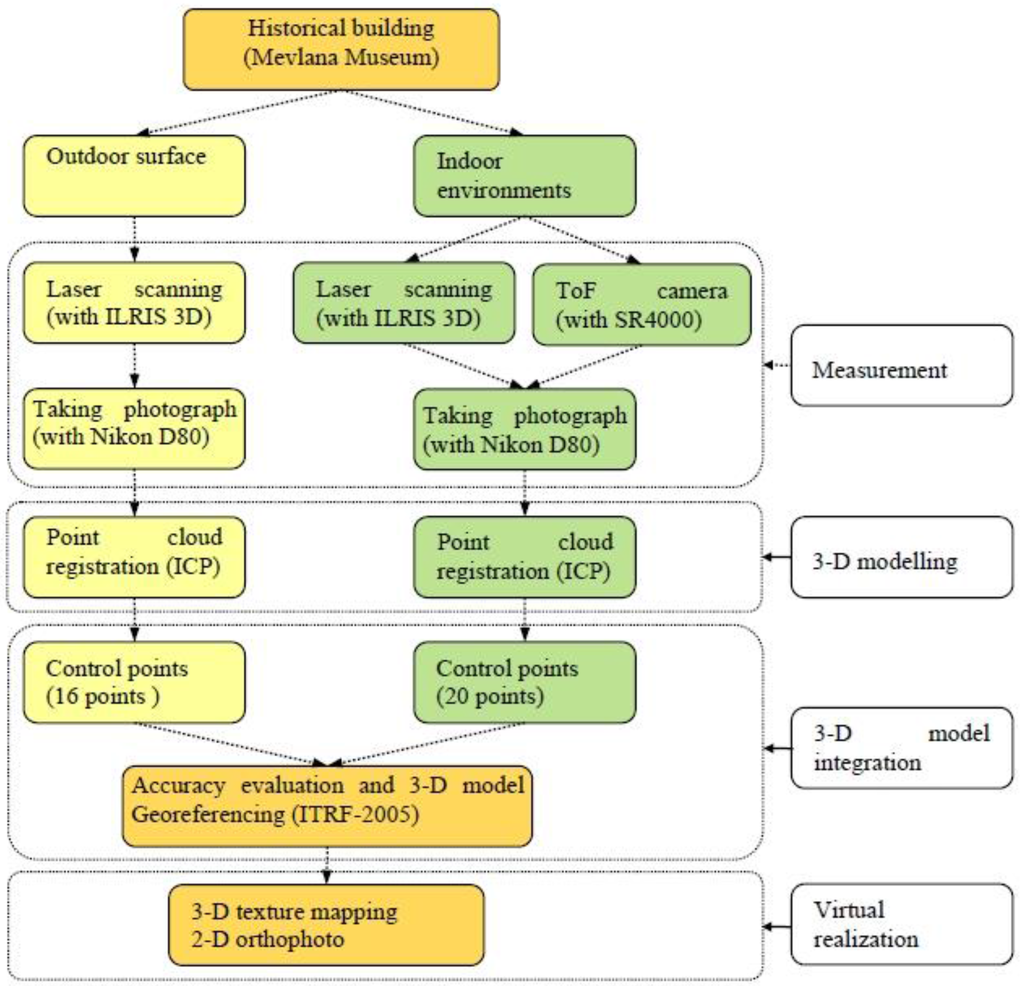
شکل 3. نمودار جریان روش نقشه برداری و مدل سازی سه بعدی.
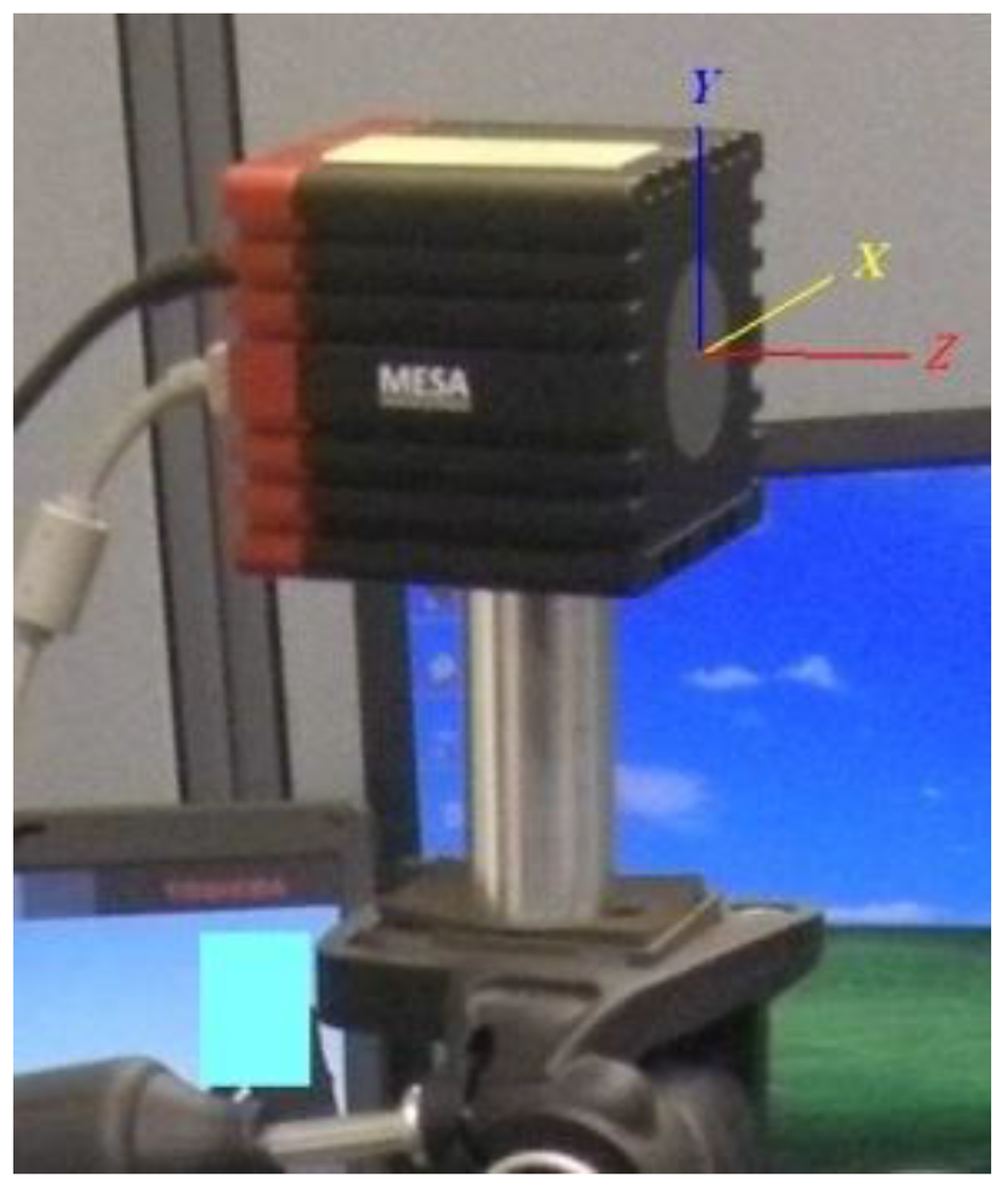
شکل 4. محور مختصات دوربین SwissRanger SR4000.

شکل 5. نمای بیرونی موزه با اسکنر لیزری از 110 ایستگاه اندازه گیری شد. برخی از جزئیات بارها با اندازه گیری های همپوشانی اسکن شدند. افسانه رنگ در سمت راست اندازه گیری های مکرر را نشان می دهد (به عنوان مثال، مناطق قرمز 10 بار اندازه گیری شدند).

شکل 6. مدل ابر نقطه سه بعدی بیرونی موزه مولانا. تصاویر از سمت غرب ( چپ ) و شمال ( راست ) هستند.
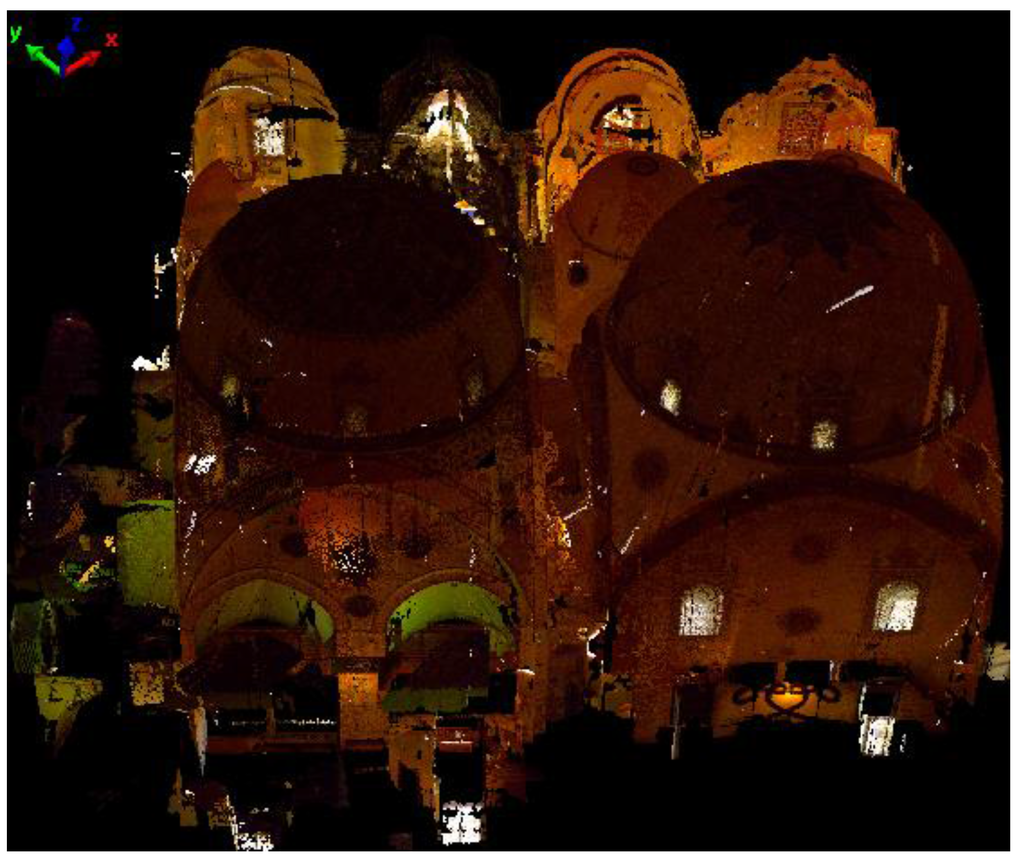
شکل 7. مدل ابر نقطه سه بعدی داخلی با رنگ.

شکل 8. محراب در بخش Huzur-ı Pir با دوربین SR4000 از دو ایستگاه اندازه گیری شد. شدت تصاویر ( بالا ) و ابرهای نقطه ( در پایین ).
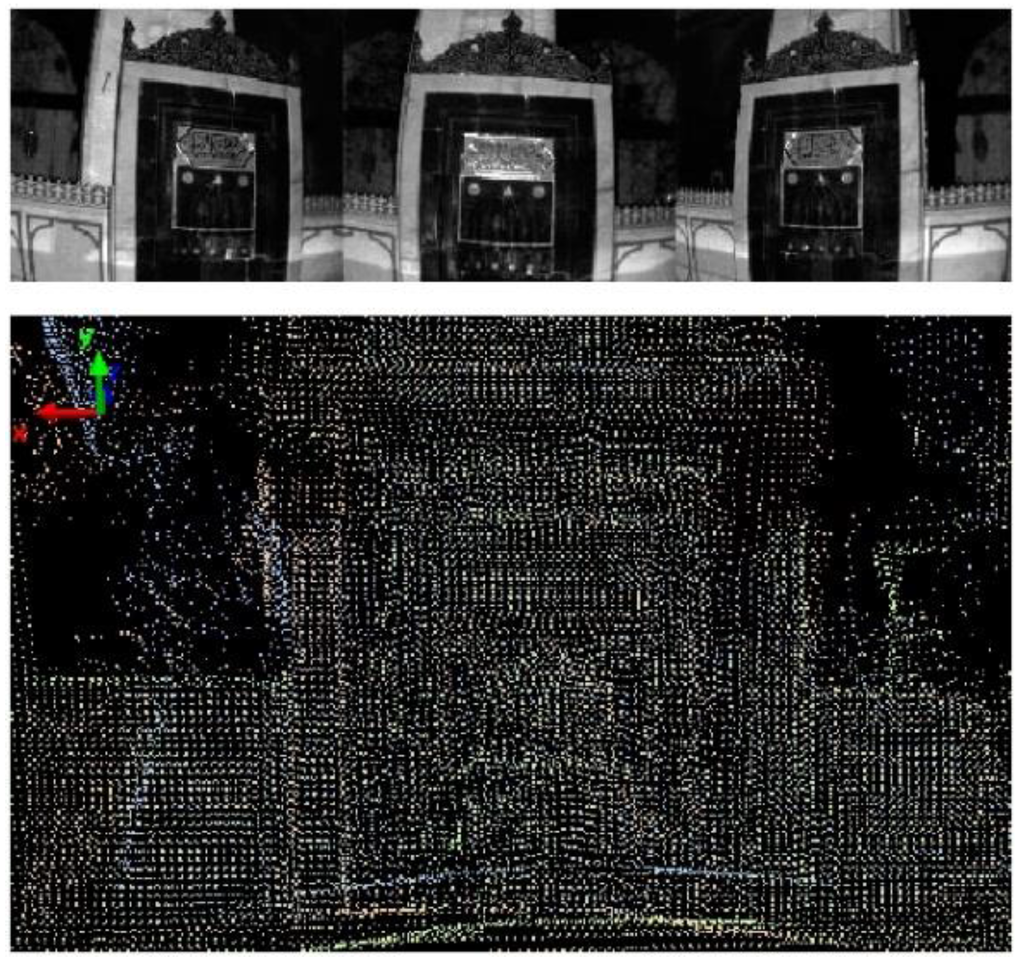
شکل 9. محراب در مسجد از سه ایستگاه با دوربین SR4000 اندازه گیری شد. ثبت اندازه گیری های مربوط به ابر نقطه اول توسط ICP اعمال شد. شدت تصاویر ( بالا ) و ابرهای نقطه ترکیبی ( زیر ).
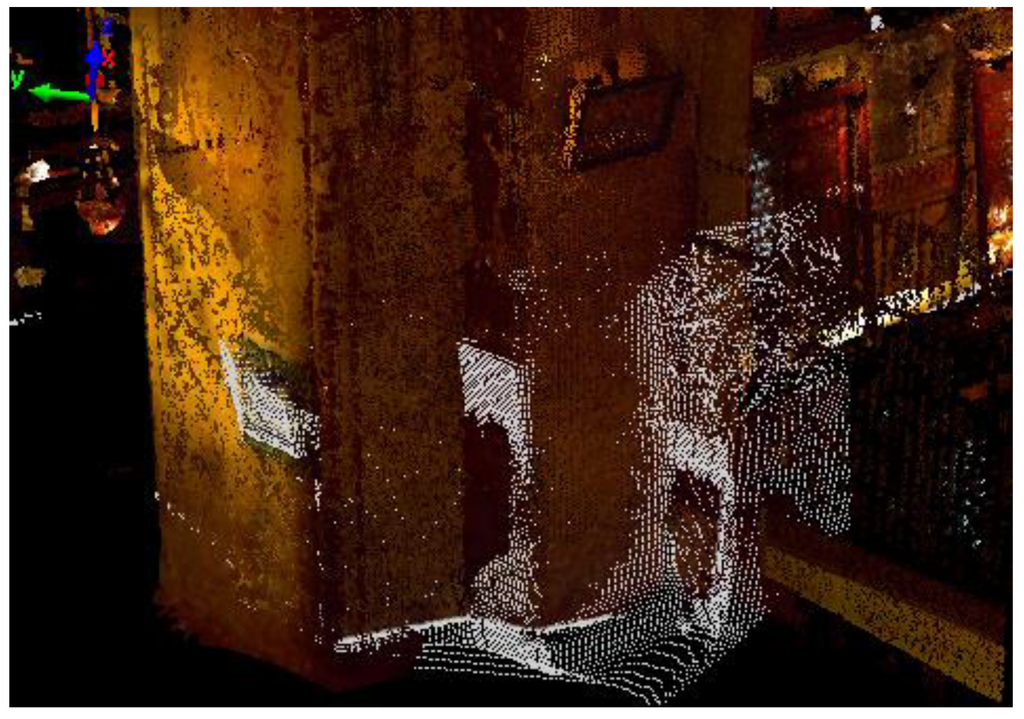
شکل 10. ابرهای نقطه دوربین ToF و TLS با ICP ترکیب شدند.
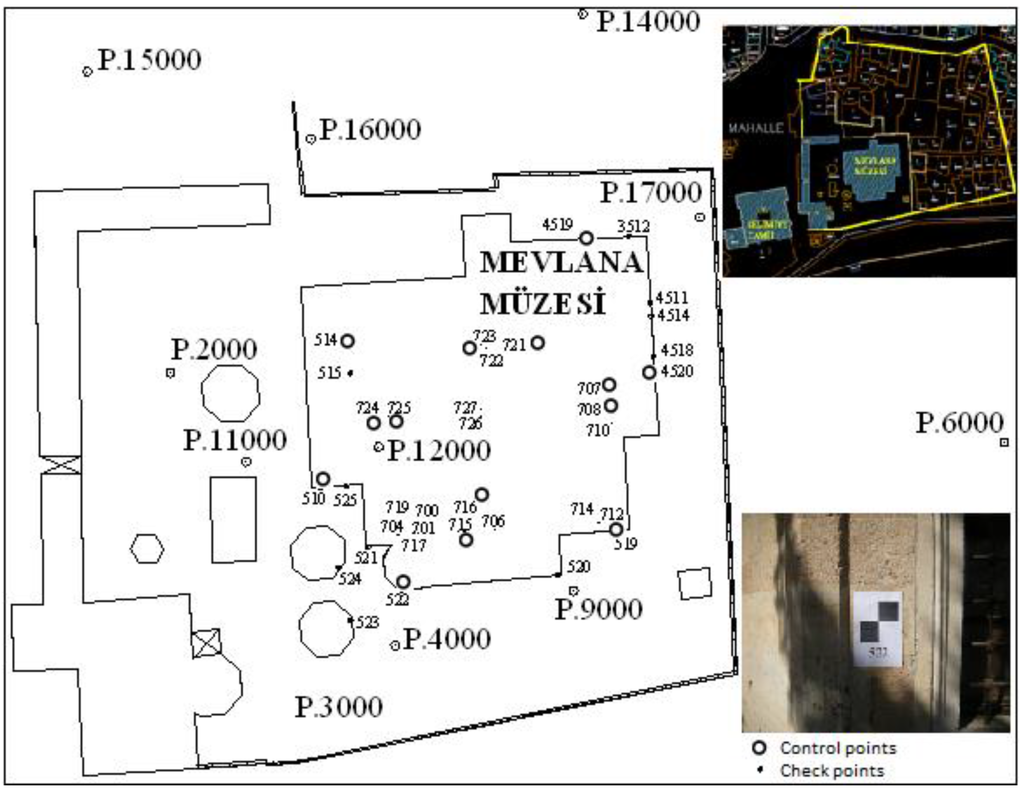
شکل 11. نقاط کنترل از نقاط تراورس اندازه گیری شد. ارجاع جغرافیایی مدلهای ابر نقطه درونی و بیرونی توسط نقاط کنترل زمینی انجام شد. دقت ارجاع جغرافیایی توسط نقاط چک ارزیابی شد.

تصویر 12. تجسم ابر نقطه ای ( بالا – چپ )، جامد ( بالا – راست ) و مشبک ( زیر ) گنبد سماحانه.

شکل 13. مدل 3 بعدی گنبد سماهانه ارتفتو و نقشه برداری بافت.

شکل 14. نگاشت بافت مدل های سه بعدی محراب ها در قسمت Huzur-ı Pir ( چپ ، وسط ) و درب مسجد ( راست ).

جدول 1. نتایج ارجاع جغرافیایی مدل ابر نقطه درونی و بیرونی موزه مولانا.
جدول 2. معیارهای ارزیابی کیفیت ( df ) برای مدل ابر نقطه سه بعدی بیرونی موزه مولانا.
جدول 3. معیارهای ارزیابی کیفیت ( df ) برای مدل ابر نقطه سه بعدی داخلی موزه مولانا.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons by Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر