1. معرفی
پهپاد هواپیمای بدون خلبان در هواپیما است که می تواند از راه دور کنترل شود یا به طور خودکار بر اساس یک مسیر از پیش برنامه ریزی شده یا سیستم اتوماسیون پرواز شود [ 1 ]. با توسعه صنعت الکترونیک هوانوردی، پهپادها نقش مهمی را در زمینه های نظامی و غیرنظامی ایفا می کنند [ 2 ، 3 ].
به طور کلی، برنامه ریزی مسیر برای یک پهپاد یک مسئله بهینه سازی است که هدف آن ایجاد یک مسیر عملی بر اساس وظایف است. مشکل یک مشکل NP-hard است [ 3 ].
برای انواع مختلف کارها، محققان روش های مختلف برنامه ریزی مسیر را انتخاب کرده اند. روش میدان برداری در ردیابی هدف استاتیک یا پویا استفاده می شود [ 4 ، 5 ]. روش درخت تصادفی کاوش سریع (RRT) برای مشکل برنامه ریزی مسیر ربات های داخلی و پهپادهای کوچک استفاده شده است [ 6 ، 7 ، 8 ]. الگوریتم های ژنتیک (GA) برای حل مشکلات فروشنده دوره گرد مربوط به پهپادها، مانند جمع آوری حداکثر اطلاعات [ 9 ] استفاده می شود. الگوریتم تکاملی (EA) برای برنامه ریزی مسیر چند محدودیتی در یک سناریوی شبیه سازی استفاده می شود [ 10 ، 11 ، 12]. بهینه ساز ازدحام ذرات (PSO) برای حل مشکل برنامه ریزی مسیر پهپادها در دریا استفاده می شود [ 13 ]. الگوریتم های بهبود یافته ACO [ 14 ، 15 ]، A* و Theta* [ 16 ] برای برنامه ریزی مسیر در محیط های سه بعدی استفاده می شوند. برای بهبود کارایی تحقیقات بمبهای بدون سرنشین، محققان الگوریتم کوانتومی باد رانده [ 17 ] را پیشنهاد کردهاند.
محققان روشهای بهینهسازی و بهسازی مختلفی را برای مسئله برنامهریزی مسیر در شرایط مختلف پیشنهاد کردهاند و این مسائل را به خوبی حل کردهاند. برای سناریوهای مختلف، هر الگوریتم محدودیتهای خاص خود را نیز دارد: توانایی RRT برای اجتناب از موانع رضایتبخش نیست. زمان پردازش الگوریتم A* با بزرگ شدن صحنه برنامه ریزی به طور انفجاری افزایش می یابد. و پیچیدگی محاسباتی الگوریتم های GA و EA زیاد است [ 18 ]. محققان تمایل دارند الگوریتم انتخاب شده را مطابق با سناریوهای شبیه سازی خودشان بهینه کنند، اما به نظر می رسد نتایج آزمایش ها چندان عینی نیستند. به عنوان مثال، نتایج به دست آمده توسط PSO بسیار بهتر از GA در [ 13 ] بود، در حالی که نتایج PSO نسبت به GA در [13] پایین تر بود. 18] پایین تر بود.].
پلتفرم کره مجازی دارای مزایای بزرگ هزینه کم و سهولت استفاده در جمع آوری داده ها، مرور، تجسم و سایر جنبه ها است [ 19 ]. برای مشکل برنامه ریزی مسیر برای یک پهپاد با استقامت بالا، پلت فرم کره مجازی انتخاب خوبی برای تحقق مدل سازی و تجسم یک محیط بسیار بزرگ است. بسیاری از پلتفرمهای رایج کره مجازی مانند Skyline، Google Earth، Virtual Earth، World Wind و ArcGlobe وجود دارند.
علاوه بر این، پهپادها در مناطق خطرناک دشمن در وظایف نفوذ نظامی کار می کنند. اجتناب از تهدیدات دشمن، عامل کلیدی در موفقیت وظایف است. برنامه ریزی مسیر برای نفوذ یک مسیر عملی بین نقطه شروع و نقطه پایان در حضور یک محیط تهدید پیدا می کند. پدافند نواحی ارتفاع متوسط و بلند در سامانههای پدافند هوایی به دلیل توسعه تکنیک شبکه راداری در حال بهبود است [ 20]]. بدون هواپیماهای رادارگریز فرصتی برای نفوذ وجود ندارد. با این حال، مناطق کور رادار زیادی در مناطق کم ارتفاع به دلیل توپوگرافی و انحنای زمین وجود دارد و پرواز در سطح پایین به یک راه مهم برای نفوذ تبدیل می شود. در پلتفرم کره مجازی، مدلسازی تهدید و برنامهریزی مسیر واقعیتر و مؤثرتر است و عملیات مأموریت را میتوان انجام داد [21 ]. با استفاده از قابلیتهای تعاملی پلتفرم کره مجازی، عملیاتهایی مانند تنظیم پارامتر، ویرایش و ذخیرهسازی مسیر و شبیهسازی پرواز را میتوان محقق کرد و با موفقیت در زمینههای صنعتی اعمال کرد.
در بستر کره مجازی، روش ساخت مدل، برنامه ریزی پارتیشن های فضایی و تحقق الگوریتم به روش های زیر با مطالعات قبلی متفاوت خواهد بود:
-
هنگام مدلسازی مناطق تهدید رادار، حداکثر محدوده پوشش رادار هشدار اولیه میتواند تا صدها، حتی هزاران کیلومتر، با پوشش سیگنال بزرگتر در مناطق با ارتفاع بالا نسبت به ارتفاعات پایین باشد. با استفاده از پلتفرم کره مجازی، میتوانیم یک مدل تهدید راداری معقولتر با توجه به معادله رادار بسازیم و تأثیرات انحنای زمین و پوشش زمین را کاملاً در نظر بگیریم.
-
مقیاس داده های زمین در پلت فرم کره مجازی بزرگ است. با توجه به این مشکل، این مقاله یک فضای برنامه ریزی چند دانه بندی را برای دستیابی به تعادل بین دقت و کارایی پیشنهاد می کند.
-
در نفوذ در ارتفاع پایین، یک توانایی خوب تعقیب دره می تواند به طور موثر از تهدید راداری، از جمله تهدیدات ناشناخته راداری جلوگیری کند. ما یک الگوریتم محلی تقویت شده دنبال دره را برای برنامه ریزی مسیر پیشنهاد می کنیم.
-
فضای برنامه ریزی باید بین سیستم های دکارتی و سیستم های ژئودتیکی تبدیل شود. به دلیل مشکل سربار ایجاد شده توسط داده های مقیاس بزرگ و تبدیل فضا، ما برخی از جزئیات پیاده سازی الگوریتم را بهینه می کنیم.
-
از آنجایی که خطاهای خاصی در سیستم ناوبری و سیستم کنترل پهپاد وجود دارد، این مقاله به استانداردهای صنعتی مانند استاندارد ناوبری مبتنی بر عملکرد (PBN) [22] برای بهینه سازی و بهبود استحکام مسیر برای جلوگیری از برخورد به دلیل پرواز اشاره می کند. خطاها
بخش 2 مشکل برنامه ریزی مسیر و شاخص های ارزیابی در محیط ریسک را تشریح می کند. در بخش 3 ما یک فضای برنامه ریزی چند دانه ای را در پلت فرم کره مجازی برای برنامه ریزی مسیر پیشنهاد می کنیم و انواع مختلفی از تهدیدها را در نظر می گیریم. در بخش 4 ، ما یک الگوریتم ACO بهبود یافته با دنبال کردن دره و اجتناب از تهدید برای برنامهریزی مسیر و برخی از الگوریتمهای بهینهسازی مسیر برای موثرتر و قویتر کردن مسیر پیشنهاد میکنیم. بخش 5 عملی بودن روش های پیشنهادی را از طریق آزمایش نشان می دهد. بخش 6 نتیجه گیری را ارائه می دهد و کار تحقیقاتی آتی را پیشنهاد می کند.
2. شرح مسائل برنامه ریزی مسیر
محل یک نقطه [ خطای پردازش ریاضی ]پدر فضای ژئودتیک [ خطای پردازش ریاضی ]Ψ3با طول جغرافیایی توصیف می شود [ خطای پردازش ریاضی ]ایکس، عرض جغرافیایی [ خطای پردازش ریاضی ]y، و ارتفاع [ خطای پردازش ریاضی ]اچ. یک پهپاد در امتداد توالی نقطه مسیر تعیین شده پرواز می کند [ خطای پردازش ریاضی ]آرمسیر = {r1،r2،⋯،rn}، rمن ∈ Ψ3، جایی که [ خطای پردازش ریاضی ]r1نقطه شروع است و [ خطای پردازش ریاضی ]rnنقطه پایان است هدف از مسیریابی نفوذ به دست آوردن یک مسیر امکان پذیر با حداقل مصرف سوخت، حداکثر پوشش زمین و حداقل خطر است.
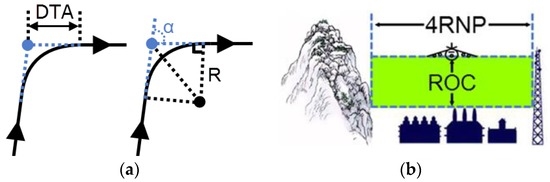
هم سیستم های ناوبری و هم سیستم های کنترل پهپادها دارای انحرافات خاصی هستند. سازمان بین المللی هوانوردی غیرنظامی مفهوم عملکرد ناوبری مورد نیاز (RNP) را پیشنهاد کرد. RNP [ 22 ] دقتی را که می توان در طول حداقل 95 درصد از زمان پرواز به دست آورد، توصیف می کند. واحد دقت مایل دریایی (nmi) است. در شکل 1 ، عرض قطعه مسیر به صورت 4 × RNP تعریف شده است. مسیر برنامه ریزی شده ممکن است محدودیت های عملکرد پهپادها را برآورده نکند.
ما مسیر برنامه ریزی را در چهار بعد ارزیابی می کنیم: حداقل مصرف سوخت، حداکثر پوشش زمین، حداقل خطر و ایمنی عملکرد. علاوه بر این، ما کارایی برنامه ریز را ارزیابی می کنیم:
-
[ خطای پردازش ریاضی ]Lمسیر: طول مسیر. نقاط را به هم وصل کنید [ خطای پردازش ریاضی ]آرمسیربه صورت متوالی و یک سری پاره خط بدست آورید، سپس طول کل قطعات را محاسبه کنید تا طول مسیر را بدست آورید. برای ارزیابی نتیجه، کوتاهترین طول مسیر را از لحاظ نظری معرفی میکنیم. [ خطای پردازش ریاضی ]Lدقیقه. سپس، ما را وصل می کنیم [ خطای پردازش ریاضی ]r1و [ خطای پردازش ریاضی ]rnاز [ خطای پردازش ریاضی ]آرمسیربرای بدست آوردن پاره خط مستقیم [ خطای پردازش ریاضی ]r1rn. [ خطای پردازش ریاضی ]Lدقیقهطول است [ خطای پردازش ریاضی ]r1rn.
-
[ خطای پردازش ریاضی ]ساعتavT: میانگین ارتفاع اراضی عبور شده توسط مسیر. [ خطای پردازش ریاضی ]ساعتavTبه صورت زیر محاسبه می شود: نقاط درونیابی را بدست آورید [ خطای پردازش ریاضی ]{r1(ایکس1،y1،اچ1)،r2(ایکس2،y2،اچ2)،⋯،rک(ایکسک،yک،اچک)}با فاصله [ خطای پردازش ریاضی ]∀از [ خطای پردازش ریاضی ]آرمسیر. سپس می توانیم نقاطی را در زمین بدست آوریم [ خطای پردازش ریاضی ]{r1(ایکس1،y1،اچ1تی)،r2(ایکس2،y2،اچ2تی)،⋯،rک(ایکسک،yک،اچkT)}، و [ خطای پردازش ریاضی ]ساعتavT= ∑من=1کاچآی تی/ک. برای ارزیابی نتیجه، مرجعی را معرفی می کنیم [ خطای پردازش ریاضی ]اچavT، میانگین ارتفاع زمین عبور کرده است [ خطای پردازش ریاضی ]r1rn. ما می توانیم توانایی پوشش زمین برنامه ریز را با تضاد نتیجه با آن درک کنیم [ خطای پردازش ریاضی ]اچavT.
-
[ خطای پردازش ریاضی ]LFA: طول مسیری که از مناطق تهدید می گذرد.
-
[ خطای پردازش ریاضی ]Lایالات متحده: طول مسیری که الزامات ایمنی عملکرد پرواز را برآورده نمی کند.
-
زمان پردازش.
3. فضای برنامه ریزی را بسازید
3.1. فضای مجازی گلوب
برای وظایف نفوذ در کره مجازی، فضای برنامه ریزی باید بین فضای ژئودتیکی تبدیل شود [ خطای پردازش ریاضی ]Ψ3و فضای دکارتی [ خطای پردازش ریاضی ]Ʊ3. [ خطای پردازش ریاضی ]Ψ3زمین را به عنوان یک بیضی مرجع در نظر می گیرد. [ خطای پردازش ریاضی ]پ(ایکس،y،اچ)∈Ψ3قابل تبدیل به [ خطای پردازش ریاضی ]س(ایکس، Y، ز)∈Ʊ3به شرح زیر است:
جایی که [ خطای پردازش ریاضی ]مشعاع انحنای بیضی مرجع را نشان می دهد که به صورت زیر محاسبه می شود:
جایی که [ خطای پردازش ریاضی ]آو [ خطای پردازش ریاضی ]ببه ترتیب طول محور اصلی و محور فرعی بیضی مرجع را نشان می دهد.
[ خطای پردازش ریاضی ]س(ایکس، Y، ز)∈Ʊ3قابل تبدیل به [ خطای پردازش ریاضی ]پ(ایکس،y،اچ)∈Ψ3به شرح زیر است:
بیضی مرجع مورد استفاده توسط سیستم موقعیت یاب جهانی و پلتفرم های کره مجازی، سیستم جهانی ژئودتیک بیضی 1984 (بیضی WGS-84) است [ 22 ].
طول فاصله طولی یکسان در عرض های جغرافیایی مختلف و فاصله زمانی یکسان در طول های مختلف جغرافیایی ثابت نیست. [ خطای پردازش ریاضی ]Ψ3. برای مثال، فاصله بین (90 درجه، 29 درجه، 4000 متر) و (91 درجه، 29 درجه، 4000 متر) 97422.04 متر است، در حالی که فاصله بین (90 درجه، 26 درجه، 4000 متر) و (91 درجه، 26 درجه، 4000 متر) 100،114.77 متر است. در بخشهای بعدی، فضای برنامهریزی وارد میشود [ خطای پردازش ریاضی ]Ψ3، اما اندازه گیری فاصله، الگوریتم درون یابی، محاسبه معادله و سایر عملیات در [ خطای پردازش ریاضی ]Ʊ3.
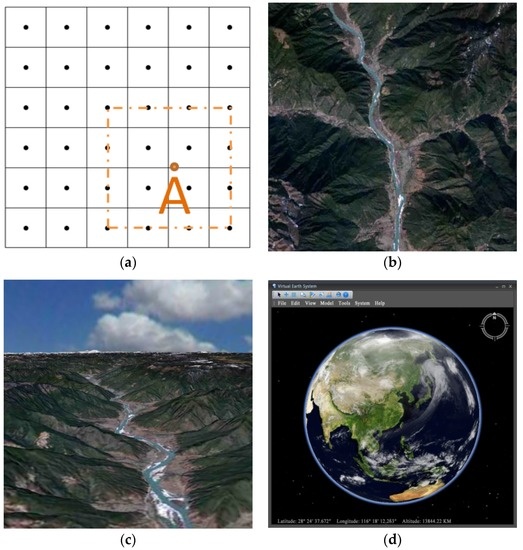
زمین معمولاً با دادههای مدل رقومی ارتفاع (DEM) توصیف میشود، در حالی که بافت زمین با دادههای نقشه ارتوفتو دیجیتال (DOM) توصیف میشود. داده های DEM و DOM را می توان به صورت نمایش داد [ خطای پردازش ریاضی ]{(ایکس،y،z)من}، جایی که [ خطای پردازش ریاضی ]ایکسطول جغرافیایی است و [ خطای پردازش ریاضی ]yعرض جغرافیایی است. در داده های DEM، [ خطای پردازش ریاضی ]zمقدار ارتفاع موقعیت مربوطه است، در حالی که [ خطای پردازش ریاضی ]zمقدار پیکسل برای داده های DOM است، همانطور که شکل 2 a,b نشان می دهد.
DEM و DOM فضای گسسته را توصیف می کنند، در حالی که دنیای واقعی به فضای پیوسته تعلق دارد. اطلاعات هر موقعیت را می توان با استفاده از روش درون یابی فضایی از طریق نقاط مجاور به دست آورد و الگوریتم درون یابی دو مکعبی به شرح زیر است:
می توانیم از نقاط 4 × 4 مجاور استفاده کنیم [ خطای پردازش ریاضی ]آدر شکل 2 الف برای محاسبه ضرایب تابع درونیابی برای تعیین مقدار ارتفاع نقطه [ خطای پردازش ریاضی ]آ.
در شکل 2 ج، میتوانیم با قرار دادن دادههای DOM بر روی دادههای DEM، تجسم زمین سه بعدی را درک کنیم. در این مطالعه، ما از پلت فرم بهبود یافته NASA-WorldWind استفاده کردیم. منبع داده، داده های SRTM DEM در وضوح 90 متر و داده های Landsat DOM در وضوح 60 متر بود که به طور عمومی توسط ناسا ارائه شد، همانطور که در شکل 2 d نشان داده شده است.
3.2. مدل سازی تهدید
3.2.1. انواع کلی تهدید
مناطق پرواز ممنوع، آب و هوای خطرناک، ساختمان های بلند و مناطق کنترل ارتفاع کم باید در برنامه ریزی مسیرها در نظر گرفته شوند.
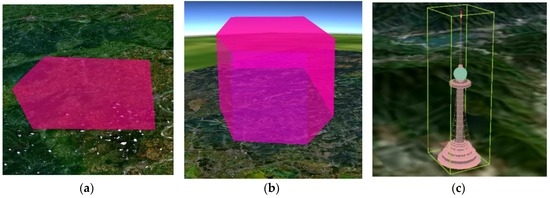
مناطق پرواز ممنوع مناطقی هستند که پهپاد نمی تواند در آنها پرواز کند. یک منطقه پرواز ممنوع را می توان به عنوان منطقه محصور تعریف شده توسط مجموعه نقطه توصیف کرد [ خطای پردازش ریاضی ]آ = {آ1، آ2، ⋯، آمتر}، m > 2، همانطور که در شکل 3 نشان داده شده است .
ساختمان های مرتفع، آب و هوای کم خطر و مناطق کنترل ارتفاع کم، مناطق کم ارتفاعی هستند که پهپادها نمی توانند در آنها پرواز کنند. چنین تهدیدهایی را می توان اینگونه توصیف کرد [ خطای پردازش ریاضی ]{{آ1، آ2، آ3، ⋯، آمتر}، اچحداکثر}، m > 2، که در آن [ خطای پردازش ریاضی ]اچحداکثرحد بالایی است. این نوع تهدید همانطور که در شکل 3 b,c مشاهده شده است مدل سازی شده است. با این تهدیدها می توان به عنوان داده های زمین برخورد کرد. ما این نوع منطقه تهدید را قبل از برنامه ریزی مسیر به زمین تبدیل می کنیم.
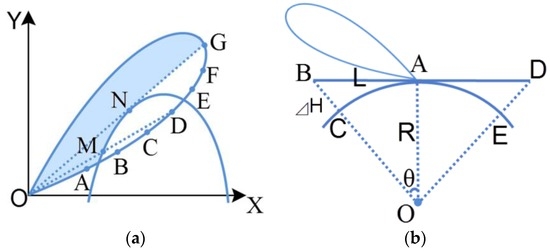
3.2.2. منطقه کشتار یک موشک دفاع هوایی
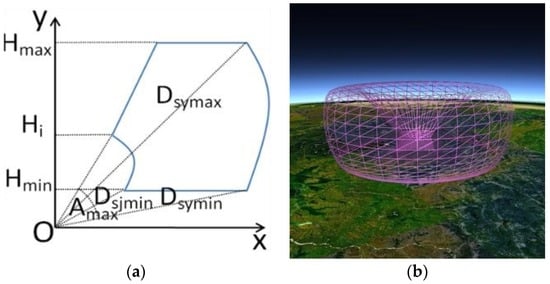
منطقه کشتار [ 23 ، 24 ] یک دستورالعمل مهم برای قضاوت در مورد عملکرد کمپین سیستم های تسلیحات موشکی دفاع هوایی است. منطقه کشتار منطقهای از فضا را توصیف میکند که در آن موشک میتواند هدف را با احتمال معین پس از ورود هدف به منطقه منهدم کند. مدل ریاضی منطقه کشتار عمودی در شکل 4 الف نشان داده شده است. خطوط افقی مرزهای بالا و پایین را با ارتفاع مشخص می کنند [ خطای پردازش ریاضی ]اچحداکثرو [ خطای پردازش ریاضی ]اچدقیقه، به ترتیب. [ خطای پردازش ریاضی ]Dسیمینحداقل برد شیب مرز دور منطقه کشتار است و [ خطای پردازش ریاضی ]Dسیمکسحداکثر دامنه شیب است. حداقل دامنه شیب و حداکثر زاویه ارتفاع مرز نزدیک منطقه کشتار می باشد [ خطای پردازش ریاضی ]Dsjminو [ خطای پردازش ریاضی ]آحداکثر، به ترتیب. مرز نزدیک و مرز دور کمان هایی با [ خطای پردازش ریاضی ]Oبه عنوان مرکز شکل 4 ب مدل تجسم سه بعدی منطقه کشتار موشک را نشان می دهد.
3.2.3. فضای تهدید رادار
رادار نقش بسیار مهمی در سیستم های مدرن پدافند هوایی ایفا می کند. این یک تهدید کلیدی برای نفوذ پهپادها است که باید با برنامه ریزی مسیر از آن جلوگیری کرد. تحت تأثیر پوشش زمین و انحنای زمین، یافتن هدف در پرواز در ارتفاع پایین برای رادار دشوار است.
مدل تهدید راداری باید به آستانه احتمال تشخیص راداری که یک پهپاد می تواند حداکثر تحمل کند اشاره کند. با توجه به آستانه احتمال تشخیص و پارامترهای عملکرد رادار، حداکثر برد رادار [ خطای پردازش ریاضی ]آرحداکثرمی توان با معادله رادار [ 25 ] تخمین زد. با فرض استقرار رادار در [ خطای پردازش ریاضی ]آرآ(ایکسآ،yآ،اچآ)که در [ خطای پردازش ریاضی ]Ψ3، آن را تبدیل می کنیم [ خطای پردازش ریاضی ]Ʊ3مانند [ خطای پردازش ریاضی ]آرآ(ایکسآ،Yآ،زآ)، با جهت زاویه گام [ خطای پردازش ریاضی ]�و زاویه آزیموت [ خطای پردازش ریاضی ]�، و ما می توانیم توصیف کنیم [ خطای پردازش ریاضی ]پک(ایکسک،Yک،زک)در مرز پوشش راداری به صورت:
جایی که [ خطای پردازش ریاضی ]f“(�)الگوی پرتو آنتن رادار در جهت زاویه گام را شرح می دهد.
ما از تابع گاوسی برای تقریب الگوی پرتو به صورت زیر استفاده می کنیم:
جایی که [ خطای پردازش ریاضی ]�بعرض پرتو سیگنال است.
بنابراین می توان سطح منحنی تهدید رادار را بدست آورد. احتمال کشف رادار در این سطح ثابت است. در خارج از سطح منحنی، احتمال تشخیص رادار کمتر از آستانه احتمال است و پهپاد ایمن در نظر گرفته می شود. در داخل سطح منحنی، احتمال تشخیص رادار بالاتر از آستانه احتمال است و پهپاد ایمن نیست.
در مناطق کم ارتفاع، سیگنال های رادار ممکن است توسط زمین پوشانده شوند. در شکل 5 الف، پرتوهای رادار تا حدی توسط زمین پوشانده شده اند و ناحیه سایه دار منطقه ای را نشان می دهد که سیگنال ها می توانند به آن برسند. تجسم پرتو رادار را می توان به صورت زیر ساخت:
-
با استفاده از معادلات (5) و (6) برد تشخیص رادار را با زوایای گام های مختلف نمونه برداری شده محاسبه کنید. این یک سری نقاط نمونه برداری مانند [ خطای پردازش ریاضی ]آ–جیهمانطور که در شکل 5 الف نشان داده شده است.
-
مرکز رادار را وصل کنید [ خطای پردازش ریاضی ]Oبه نقطه نمونه برداری رسیده و با نمونه برداری با فواصل کوتاه، یک سری نقاط نمونه برداری در این خط مستقیم بدست آورید. سپس، این نقاط نمونه برداری را به تبدیل می کنیم [ خطای پردازش ریاضی ]Ψ3و ارتفاع نقاط نمونه برداری را با زمین مقایسه کنید. هنگامی که نقطه نمونه برداری در زیر زمین قرار دارد، می توانیم تعیین کنیم که منطقه بعدی توسط سیگنال رادار قابل دسترسی نیست. در شکل 5 الف، با توجه به تحلیل دید زمین از [ خطای پردازش ریاضی ]OD، نقطه مرزی [ خطای پردازش ریاضی ]Dمنتقل می شود به [ خطای پردازش ریاضی ]م.
اگر پوشش رادار را به طور مستقیم محاسبه کنیم، انحنای زمین خطای قابل توجهی ایجاد می کند. همانطور که در شکل 5 ب نشان داده شده است، [ خطای پردازش ریاضی ]Oمرکز زمین است، [ خطای پردازش ریاضی ]BDصفحه افقی، قوس دایره ای است [ خطای پردازش ریاضی ]CEژئوئید و نقطه است [ خطای پردازش ریاضی ]بدر همان صفحه افقی نقطه قرار دارد [ خطای پردازش ریاضی ]آ. چه زمانی [ خطای پردازش ریاضی ]ببسیار نزدیک است [ خطای پردازش ریاضی ]آ، ارتفاعات از [ خطای پردازش ریاضی ]آو [ خطای پردازش ریاضی ]بتقریباً یکسان هستند و ممکن است نادیده گرفته شوند. با این حال، زمانی که [ خطای پردازش ریاضی ]بدور است از [ خطای پردازش ریاضی ]آ، اختلاف ارتفاع بین [ خطای پردازش ریاضی ]آو [ خطای پردازش ریاضی ]ببه دلیل تأثیر انحنای زمین، [ خطای پردازش ریاضی ]Δاچدر شکل 5 ب، نمی توان نادیده گرفت. [ خطای پردازش ریاضی ]Lنشان دهنده طول است [ خطای پردازش ریاضی ]AB، [ خطای پردازش ریاضی ]آرشعاع انحنای متوسط زمین است و [ خطای پردازش ریاضی ]Δاچقابل محاسبه است:
هنگامی که فاصله بین دو نقطه 100 کیلومتر است، به دلیل تأثیر انحنا، اختلاف ارتفاع تقریباً 785 متر است. ابتدا باید از را تبدیل کنیم [ خطای پردازش ریاضی ]Ψ3به [ خطای پردازش ریاضی ]Ʊ3هنگام محاسبه مرز پوشش رادار. سپس میتوانیم پوشش رادار را محاسبه کرده و تحلیل دید را انجام دهیم. در نهایت، نتایج به بازگشت به [ خطای پردازش ریاضی ]Ψ3و خطاهای ناشی از انحنای زمین برطرف شده است.
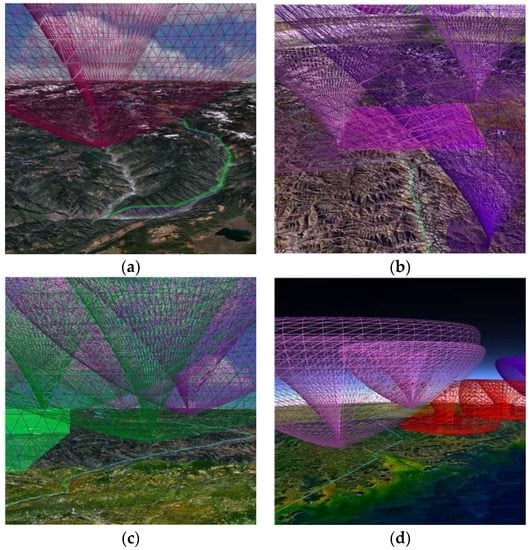
شکل 6 تجسم سه بعدی پوشش شبکه رادار تحت تاثیر انحنای زمین را نشان می دهد.
3.3. تهدید پویا
مدل های ارائه شده در بخش 3.2 می توانند بیشتر تهدیدات را در شرایط عادی شبیه سازی کنند. گاهی اوقات حرکت تهدید باید در نظر گرفته شود، به عنوان مثال، پیش بینی آب و هوای خطرناک مانند طوفان (طوفان) و سایر مناطق تهدید پویا قابل پیش بینی. در این زمان باید مدل تهدید پویا را معرفی کنیم. بر اساس مدل تهدید کلی، یک مهر زمانی [ خطای پردازش ریاضی ]تیمعرفی شده است، ویژگی یک تهدید پویا در [ خطای پردازش ریاضی ]تیتوسط [ خطای پردازش ریاضی ]تهدیدتی = {{آ1، آ2، آ3،⋯، آمتر}، اچحداکثر،تی}، متر > 2. یک تهدید پویا مسیر کامل را می توان توسط [ خطای پردازش ریاضی ]{تهدیدتی1، تهدیدتی2، ⋯،تهدیدتیn}، جایی که تهدید از آنجا شروع می شود [ خطای پردازش ریاضی ]تی1و ناپدید می شود در [ خطای پردازش ریاضی ]تیn. همانطور که در شکل 7 a,b نشان داده شده است، اگر بخواهیم وضعیت یک تهدید را در هر زمان بدانیم [ خطای پردازش ریاضی ]تیک، می توانیم آن را به صورت زیر محاسبه کنیم:
-
جستجوی فاصله [ [ خطای پردازش ریاضی ]تیمن، تیمن+1]که راضی می کند [ خطای پردازش ریاضی ]تیمن ≤ تیک<تیمن+1برای پیدا کردن [ خطای پردازش ریاضی ]تهدیدتیمنو [ خطای پردازش ریاضی ]تهدیدتیمن+1. اگر پیدا نشد، در حال حاضر هیچ منطقه تهدیدی وجود ندارد.
-
با توجه به تهدید [ خطای پردازش ریاضی ]تیک = 2.4نشان داده شده در شکل 7 ب، از درون یابی خطی برای [ خطای پردازش ریاضی ]تهدیدتیمنو [ خطای پردازش ریاضی ]تهدیدتیمن+1بدست آوردن [ خطای پردازش ریاضی ]تهدیدتیک. همانطور که در شکل 7 ب نشان داده شده است، می توانیم از درون یابی خطی برای چهار راس استفاده کنیم [ خطای پردازش ریاضی ]تهدیدتیمنو [ خطای پردازش ریاضی ]تهدیدتیمن + 1بدست آوردن [ خطای پردازش ریاضی ]تهدیدتیک.
3.4. فضای برنامه ریزی شبکه ای را بسازید
برنامه ریزی مسیر بر روی پلت فرم کره مجازی در این مطالعه بر اساس الگوریتم جستجوی نمودار است. ما یک نمودار برنامه ریزی متشکل از گره ها و لبه ها را تعریف می کنیم. این نمودار باید به طور موثر تهدیدها و ویژگی های زمین را بیان کند.
در ماموریت های نفوذ در ارتفاع پایین، مدل های تهدید باید علامت گذاری شوند. با این حال، نمونه برداری بلادرنگ از بدنه تهدید در هر نقطه از فضای برنامه ریزی، زمان تاخیر برنامه ریز را به طور چشمگیری افزایش می دهد. این مقاله نوعی از فضای شبکه را با اطلاعات مکان، اطلاعات ارتفاع و سایر اطلاعات ویژگی معرفی می کند.
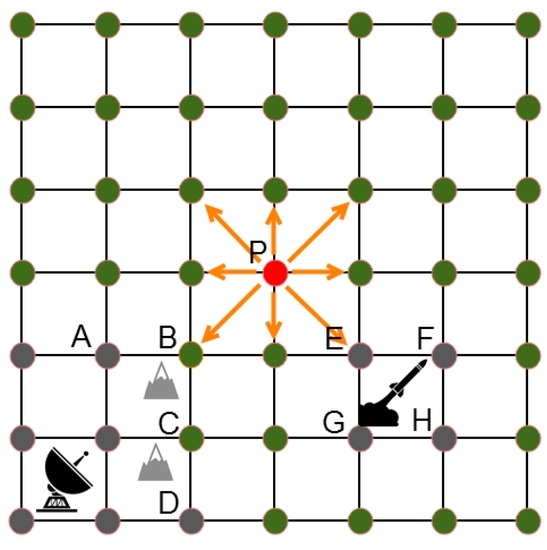
در شکل 8 ، فضا با فواصل مساوی از عرض و طول جغرافیایی به یک شبکه دو بعدی تقسیم شده است. هر گره در شبکه دارای هشت گره توسعه است. با این حال، فاصله واقعی نشان داده شده توسط فواصل مساوی طول و عرض جغرافیایی متفاوت است. در پلتفرم کره مجازی، فضای برنامه ریزی در واقع یک فضای شبکه هشت متصل نامنظم است.
یک پهپاد در ارتفاع امن پرواز می کند [ خطای پردازش ریاضی ]ساعتبه صورت پیش فرض در این فضا هر گره اطلاعاتی از جمله را ذخیره می کند [ خطای پردازش ریاضی ][lon، لات، alt، اچدقیقه]، جایی که [ خطای پردازش ریاضی ]lonو [ خطای پردازش ریاضی ]لاتنشان دهنده طول و عرض جغرافیایی گره به ترتیب، [ خطای پردازش ریاضی ]altنشان دهنده ارتفاع زمین است که توسط ساختمان های مرتفع و مناطق کنترل ارتفاع کم روی هم قرار گرفته است و [ خطای پردازش ریاضی ]اچدقیقهپایین ترین محدوده منطقه تحت پوشش راداری یا منطقه کشتار موشک در این منطقه است. اگر گره [ خطای پردازش ریاضی ]ساعتکه نیاز به تمدید بالاتر از [ خطای پردازش ریاضی ]اچدقیقه، گره حذف خواهد شد. همانطور که شکل نشان می دهد، گره ها [ خطای پردازش ریاضی ]آ، [ خطای پردازش ریاضی ]ب، [ خطای پردازش ریاضی ]سیو [ خطای پردازش ریاضی ]Dدر منطقه تحت پوشش راداری قرار دارند. با این حال، به دلیل اثر پوشش زمین، نقاط [ خطای پردازش ریاضی ]بو [ خطای پردازش ریاضی ]سیمی تواند به عنوان گره های کاندید برنامه ریزی با بالاتر استفاده شود [ خطای پردازش ریاضی ]اچدقیقه، در حالی که گره ها [ خطای پردازش ریاضی ]آو [ خطای پردازش ریاضی ]Dبا کم [ خطای پردازش ریاضی ]اچدقیقهمستقیم حذف خواهد شد. همانطور که شکل نشان می دهد، گره [ خطای پردازش ریاضی ]E، [ خطای پردازش ریاضی ]اف، [ خطای پردازش ریاضی ]جیو [ خطای پردازش ریاضی ]اچدر منطقه تهدید موشکی هستند و به دلیل کم بودن آنها از بین خواهند رفت [ خطای پردازش ریاضی ]اچدقیقه. اگر نقطه فعلی در منطقه پرواز ممنوع قرار دارد، [ خطای پردازش ریاضی ]اچدقیقهروی 0 تنظیم می شود و نقطه توسط برنامه ریز حذف می شود. به دلیل فضای برنامه ریزی ایجاد شده از قبل، برنامه ریز می تواند به سرعت برخی از گره های غیرقابل اجرا را حذف کند.
3.4.1. گسترش منطقه تهدید
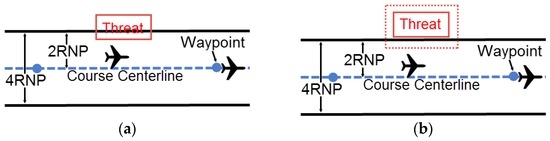
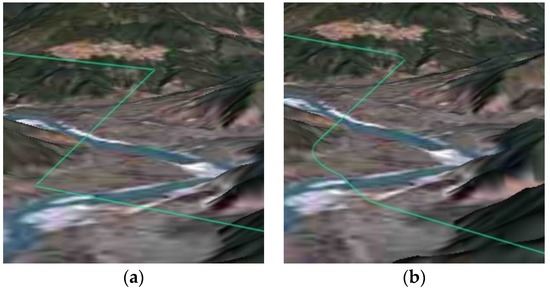
با توجه به خطای ناوبری و خطای بهینه سازی مسیر، همانطور که در شکل 9 الف نشان داده شده است، مسیر برنامه ریزی شده در فضای شبکه ممکن است منطقه در معرض خطر را قطع کند. زمانی که به فضای برنامه ریزی نقشه برداری می شود، مرز مدل های تهدید را گسترش می دهیم. مرز پایین منطقه رادار و منطقه کشتار موشک نیز کاهش یافته است. شکل 9 ب نشان می دهد که مسیر پس از گسترش منطقه تهدید ایمن است.
3.4.2. فضای برنامه ریزی چند دانه بندی
دانه بندی ریزتر فضای شبکه به این دلیل است که هر چه تعداد گره ها در فضای برنامه ریزی بیشتر باشد، نتایج برنامه ریزی دقیق تر خواهد بود، اگرچه برنامه ریزی زمان بیشتری را می طلبد. برای به دست آوردن تعادل بین عملکرد و دقت برای سناریوهای مختلف برنامه و پارامترهای عملکرد ناوبری یک پهپاد، باید از اندازههای شبکه مختلف استفاده شود.
برای ساخت اندازههای مختلف شبکه با استفاده از دادههای DEM به نمونهگیری مجدد نیاز داریم. روشهای نمونهگیری مجدد رایج عبارتند از Box Splines [ 26 ]، درون یابی [ 27 ] و تبدیل موجک گسسته [ 28 ]. این مقاله از روش درون یابی دو مکعبی معادله (4) برای نمونه گیری مجدد استفاده می کند. ما از قبل فضای شبکه را با چند دانه بندی تولید می کنیم و اندازه های شبکه های مختلف را با توجه به نیازهای وظایف مختلف انتخاب می کنیم.
4. روش برنامه ریزی مسیر
ما یک برنامه ریز مبتنی بر ACO را پیشنهاد می کنیم که محیط زمین محلی را برای به دست آوردن مسیر اولیه در نظر می گیرد. یک الگوریتم ACO در اصل فرآیند جستجوی علوفه مورچهها را شبیهسازی میکند و توسعهدهنده آن از آن برای حل مؤثر مشکل فروشنده دورهگرد استفاده میکند [ 29 ، 30 ]. مدل فرمونی و مدل احتمال هسته اصلی این الگوریتم است [ 31 ]. الگوریتم های ACO به طور گسترده برای طبقه بندی الگوها [ 32 ]، محاسبات ابری [ 33 ]، کدگذاری شبکه [ 34 ]، برنامه ریزی مسیر ربات [ 35] استفاده شده است.] و در زمینه های دیگر. ما برخی بهینهسازیها را برای بهبود الگوریتم ACO برای مطالعه پلتفرم کره مجازی و برنامهریزی مسیر نفوذ پیشنهاد میکنیم.
4.1. الگوریتم پایه ACO [ 29 , 30 ]
کلنی مورچه شروع به جستجوی غذا می کند بدون اینکه به او گفته شود غذا کجاست. مورچه ها در فرآیند حرکت، فرمون ها را در محیط آزاد می کنند. هنگامی که هیچ فرمونی در محیط وجود ندارد، مورچه ها یک راه رفتن تصادفی انجام می دهند و زمانی که غلظت فرمون بالا باشد، مورچه ها با احتمال بیشتری در مسیر فرمون حرکت می کنند. اگر مورچه غذا پیدا کند، در مسیر فرمون خود حرکت می کند تا به لانه خود بازگردد. در مسیر کوتاهتر، مورچهها مسیر رفت و برگشت را سریعتر انجام میدهند، که احتمالاً مورچههای بیشتری را برای قدم زدن در این مسیر جذب میکند. بنابراین غلظت فرمون بیشتر افزایش می یابد و در نهایت کلنی مورچه ها در کوتاه ترین مسیر قدم خواهند زد. الگوریتم پایه ACO فرآیندهای مسیریابی و بازخورد کلنی مورچه ها را شبیه سازی می کند.
4.1.1. مدل انتخاب چرخ رولت
الگوریتم ACO از یک مدل انتخاب چرخ رولت برای شبیه سازی انتخاب پیاده روی مورچه ها در طبیعت استفاده می کند. این مدل احتمال بیشتری برای انتخاب گره های مجاور با غلظت فرمون بالاتر دارد. به مورچه ها این امکان را می دهد که اشتباهاتی مرتکب شوند که احتمال کمی دارند و شانس یافتن مسیر بهتر را حفظ می کنند. در مدل، کلنی مورچه ها دارد [ خطای پردازش ریاضی ]مترمورچه ها احتمال انتقال [ خطای پردازش ریاضی ]پijک(تی)از یک مورچه [ خطای پردازش ریاضی ]ک (0≤ک<متر)حرکت از گره [ خطای پردازش ریاضی ]منبه یک گره مجاور [ خطای پردازش ریاضی ]jدر [ خطای پردازش ریاضی ]تیدور تکرار به صورت زیر بیان می شود:
جایی که [ خطای پردازش ریاضی ]�ij(تی)فرمون باقیمانده لبه است [ خطای پردازش ریاضی ]<من، j>. [ خطای پردازش ریاضی ]�ij(تی)تابع اکتشافی است [ خطای پردازش ریاضی ]از جانبگره [ خطای پردازش ریاضی ]منبه گره [ خطای پردازش ریاضی ]j; هنگام حل TSP، [ خطای پردازش ریاضی ]�ij(تی) = 1/جij. [ خطای پردازش ریاضی ]جijمنعکس کننده هزینه پیاده روی از گره است [ خطای پردازش ریاضی ]منبه گره [ خطای پردازش ریاضی ]j. [ خطای پردازش ریاضی ]�و [ خطای پردازش ریاضی ]�به ترتیب وزن فرمون و تابع اکتشافی هستند. گره های مجاور [ خطای پردازش ریاضی ]جیک(من)می تواند توسط مورچه انتخاب شود [ خطای پردازش ریاضی ]کدر گره [ خطای پردازش ریاضی ]من. با توجه به فضای برنامه ریزی تعریف شده در بالا، هر گره دارای هشت گره در حال گسترش است.
4.1.2. مدل به روز رسانی فرمون
مدل به روز رسانی فرمون یک مکانیسم بازخورد در الگوریتم ACO ارائه می دهد. بعد از اینکه همه مورچه ها یک دور تکرار را کامل کردند، فرمون ها در مسیری که مورچه ها طی می کنند باقی می مانند و غلظت فرمون به صورت زیر به روز می شود:
جایی که [ خطای پردازش ریاضی ]�ضریب حفظ فرمون است [ خطای پردازش ریاضی ](0≤�<1). [ خطای پردازش ریاضی ]Δ�ijک(تی)نشان دهنده فرمون های باقی مانده در لبه است [ خطای پردازش ریاضی ]<من، j>توسط مورچه [ خطای پردازش ریاضی ]کدر تکرار دور [ خطای پردازش ریاضی ]تیو به صورت زیر محاسبه می شود:
جایی که [ خطای پردازش ریاضی ]سکمجموعه لبه هایی است که توسط مورچه طی می شود [ خطای پردازش ریاضی ]ک و Lکهزینه کل لبه ها است.
4.2. بهینه سازی پارامتر
در الگوریتم پایه ACO، مورچه ها مکان هدف را نمی دانند. سناریوی کاربردی ما مکان هدف را میداند و بنابراین میتوانیم یک تابع اکتشافی برای هدایت مورچهها برای تسریع روند تکراری الگوریتم معرفی کنیم. در مکانیسم بازخورد فرمونی الگوریتم پایه ACO، فرمون باقی مانده توسط مورچه های کمتر موفق ممکن است با نتیجه بهتر تداخل داشته باشد، که به راحتی باعث می شود الگوریتم در یک بهینه محلی قرار گیرد. برای حل مشکل پهپاد توضیح داده شده در این مقاله، ما تابع هزینه اکتشافی، مکانیسمهای بهروزرسانی فرمون، کارایی الگوریتم و سایر جنبههای الگوریتم را بهبود بخشیم. علاوه بر این، برای جلوگیری از بازگشت مورچهها، فهرستهای تابو را برای علامتگذاری گرههایی که مورچهها از آن عبور کردهاند، تنظیم میکنیم. گره های در حال گسترش واقع در منطقه تهدید یا در لیست های تابو حذف می شوند.
4.2.1. تابع هزینه
با توجه به فضای برنامه ریزی ساخته شده در فصل 3، تابع هزینه را معرفی می کنیم:
جایی که [ خطای پردازش ریاضی ]wijهزینه لبه است [ خطای پردازش ریاضی ]<من، j>، [ خطای پردازش ریاضی ]لاجتراجطول اقلیدسی لبه است [ خطای پردازش ریاضی ]<من، j>، که تقریباً نشان دهنده هزینه مصرف سوخت پهپاد است و [ خطای پردازش ریاضی ]ساعتاجتراجمیانگین ارتفاع زمین گره است [ خطای پردازش ریاضی ]منو [ خطای پردازش ریاضی ]j، که است [ خطای پردازش ریاضی ](altمن + altj)/2و ارتفاع مسیر را نشان می دهد. از آنجایی که واحدهای هزینه مصرف سوخت و هزینه ارتفاع از نظر بزرگی یکسان نیستند، نرمال می شوند. [ خطای پردازش ریاضی ]لحداکثربزرگترین فاصله اقلیدسی از دو گره مجاور در شبکه است. چون فضای برنامه ریزی نامنظم است، تنظیم می کنیم [ خطای پردازش ریاضی ]لحداکثر=توری عرض×160 KMهنگامی که عرض شبکه تعیین می شود. [ خطای پردازش ریاضی ]ساعتحداکثرو [ خطای پردازش ریاضی ]ساعتدقیقهبه ترتیب بالاترین و کمترین ارتفاع فضای برنامه ریزی هستند. [ خطای پردازش ریاضی ]�وزنی است که عملکرد برنامه ریز را به دنبال دره تعیین می کند و پهپاد را قادر می سازد تا حد امکان پایین پرواز کند. اگر اطلاعات استقرار رادار دشمن ناشناخته باشد، پرواز در ارتفاع پایین می تواند میزان بقای پهپاد را بهبود بخشد.
4.2.2. تابع اکتشافی و دره دنبال کردن
در الگوریتم پایه ACO، مورچه ها برای رسیدن به هدف با موفقیت مشکل دارند زیرا [ خطای پردازش ریاضی ]جijفقط می تواند هزینه گره را منعکس کند [ خطای پردازش ریاضی ]منبه [ خطای پردازش ریاضی ]j، و بنابراین جهت گره انتهایی ناشناخته است. در این مطالعه، یک تابع هزینه اکتشافی معرفی شده است که می تواند مورچه را برای حرکت به سمت هدف تشویق کند:
جایی که [ خطای پردازش ریاضی ]تیjفاصله بین گره است [ خطای پردازش ریاضی ]jو نقطه هدف و [ خطای پردازش ریاضی ]تیمنفاصله بین گره است [ خطای پردازش ریاضی ]منو نقطه پایان اگر [ خطای پردازش ریاضی ]تیj > تیمن، مورچه ها دورتر و دورتر از هدف حرکت می کنند و احتمال کمتری برای انتخاب این گره به آنها اختصاص داده می شود.
معادله (12) می تواند مورچه ها را به سمت گره مقصد تشویق کند. با این حال، مورچه ها نمی توانند از اطلاعات زمین دره محلی برای رسیدن به دنبال کردن دره استفاده کنند. هنگامی که ما دادههای زمین را تجزیه و تحلیل کردیم، متوجه شدیم که منطقه دره پیوسته است و الگوریتم محلی دنبالکردن دره بر این اساس پیشنهاد شده است. هشت گره مجاور نقطه فعلی [ خطای پردازش ریاضی ]منهستند [ خطای پردازش ریاضی ]آ–اچو روش اجرا به شرح زیر است:
-
میانگین ارتفاع زمین را محاسبه کنید [ خطای پردازش ریاضی ]آ–اچنکته ها.
-
میانگین ارتفاع را با ارتفاع نقطه مقایسه کنید [ خطای پردازش ریاضی ]من; اگر بیشتر از آستانه باشد [ خطای پردازش ریاضی ]�، پهپاد در نقطه [ خطای پردازش ریاضی ]مندر منطقه کوهستانی قرار دارد.
-
اگر پهپاد در منطقه کوهستانی واقع شده باشد، مجاور [ خطای پردازش ریاضی ]آ–اچنقاط بر اساس ارتفاع آنها مرتب شده اند و [ خطای پردازش ریاضی ]2�نقاط با بالاترین ارتفاع تنظیم شده است [ خطای پردازش ریاضی ]�ij(تی) = 0.
-
اگر پهپاد در منطقه غیر کوهستانی واقع شود، تمام گره های مجاور قابل دسترسی هستند.
پس از این درمان، [ خطای پردازش ریاضی ]�ijمی تواند حرکت مورچه ها را به نقطه هدف ارتقا دهد و از اطلاعات زمین محلی به طور کامل استفاده کند.
4.2.3. مکانیسم های به روز رسانی فرمون
مکانیسم به روز رسانی الگوریتم پایه ACO باعث می شود تا نتایج زودرس به راحتی رخ دهد. استراتژی به روز رسانی فرمون که ما استفاده می کنیم به شرح زیر است:
جایی که [ خطای پردازش ریاضی ]Δ�ijبهترین*(تی)افزایش فرمونی مورچه بهینه جهانی است:
جایی که [ خطای پردازش ریاضی ]سبهترینمجموعه ای از لبه هایی است که توسط مورچه بهینه جهانی طی می شود. [ خطای پردازش ریاضی ]دبلیوبهترین*طبق رابطه (11) محاسبه شد و هزینه مسیر بهینه جهانی است. برای اطمینان از اینکه میتوان به گرههایی که مورچه بهینه جهانی راه نمیرفت، با احتمال مشخصی رسید و برای جلوگیری از نتایج زودرس به دلیل وجود فرمون بیش از حد در مسیر بهینه جهانی، غلظت فرمون را محدود میکنیم. [ خطای پردازش ریاضی ][�دقیقه، �حداکثر].
جایی که [ خطای پردازش ریاضی ]nتعداد گره تخمین زده شده مسیر بهینه جهانی است.
4.2.4. بهبود کارایی الگوریتم
به دلیل معرفی پلت فرم کره مجازی، هر محاسبه فاصله باید بین دو سیستم مختصات تبدیل شود. برای کاهش هزینه زمانی محاسبه فاصله مکرر ACO، فاصله بین گره های مجاور را از قبل محاسبه می کنیم. این مقاله یک آرایه سه بعدی از ذخیره سازی خارج از خط را معرفی می کند. بعد سوم آرایه برای ذخیره فاصله از گره فعلی استفاده می شود [ خطای پردازش ریاضی ]منبه هشت گره مجاور. علاوه بر این، یک آرایه دو بعدی برای ذخیره فاصله بین آنها استفاده می شود [ خطای پردازش ریاضی ]منو گره انتهایی
در الگوریتم ACO، مورچه ای که بدترین عملکرد را دارد ممکن است یک مسیر بسیار مغرضانه را با احتمال نسبتاً کمی اجرا کند، بنابراین بر کارایی کلی الگوریتم تأثیر می گذارد. در این مقاله حداکثر تعداد مراحل جستجو می باشد [ خطای پردازش ریاضی ]10 n; هنگامی که مراحل جستجوی مورچه ها از حداکثر تعداد بیشتر شود، نتیجه دور ریخته می شود.
4.3. اجتناب از تهدید پویا
هنگام در نظر گرفتن تهدیدات پویا، باید یک الگوریتم اجتناب از تهدید پویا را معرفی کنیم. برای جلوگیری از تهدید پویا، زمان [ خطای پردازش ریاضی ]تیمورچه در هر گره باید شناخته شود. مورچه ها برای صرفه جویی در زمان فعلی، پس از طی هر مرحله، محاسبه زیر را انجام می دهند.
با توجه به سرعت پرواز پهپاد از [ خطای پردازش ریاضی ]v، مجموعه نقطه مسیری که مورچه پیموده است [ خطای پردازش ریاضی ]{r1، r2، ⋯، rک}، ک > 1; هنگامی که k = 1، زمان شروع پهپاد است [ خطای پردازش ریاضی ]تی0. اگر زمان را بدانیم [ خطای پردازش ریاضی ]تیک–1از مورچه در گره k − 1، وقتی مورچه به سمت نقطه k می رود، فاصله [ خطای پردازش ریاضی ]rک–1rک، تحت عنوان [ خطای پردازش ریاضی ]لrک–1rک، و زمان فعلی [ خطای پردازش ریاضی ]تیک = تیک–1 + لrک–1rک/v. بنابراین زمان مورچه در هر گره ای را می توان تعیین کرد.
مورچه ها گره های در حال گسترش را با مراحل زیر حذف کردند:
-
وقتی مورچه [ خطای پردازش ریاضی ]کدر گره [ خطای پردازش ریاضی ]منهشت گره در حال گسترش را انتخاب می کند، گره های موجود در تهدید ایستا و لیست تابو مورچه ابتدا حذف می شوند و سپس می توانیم گره های در حال گسترش باقی مانده را بدست آوریم. [ خطای پردازش ریاضی ]جیک(من).
-
با استفاده از روش ذکر شده در بالا، زمان رسیدن مورچه به هر گره در حال گسترش را محاسبه می کنیم [ خطای پردازش ریاضی ]j، تحت عنوان [ خطای پردازش ریاضی ]تیj.
-
ما از روش ذکر شده در بخش 3.3 برای پیاده سازی درون یابی خطی برای هر تهدید دینامیکی در مجموعه تهدید پویا و بدست آوردن مناطق تهدید در [ خطای پردازش ریاضی ]تیj.
-
اگر گره j در هر منطقه تهدید قرار دارد، این گره را حذف می کنیم.
الگوریتم اجتناب از تهدید پویا منابع محاسباتی زیادی را مصرف خواهد کرد. بنابراین، ما دو نسخه برنامه ریزی مسیر را در حین استفاده گردآوری می کنیم. زمانی که تهدید پویا در سناریوی برنامه ریزی وجود نداشته باشد، از الگوریتم برنامه ریزی به نام MACO استفاده می شود و زمانی که باید تهدید پویا را در نظر بگیریم، الگوریتم اجتناب از تهدید پویا را معرفی کرده و نام الگوریتم برنامه ریزی را MACOD می گذاریم.
4.4. بهینه سازی مسیر
مسیر برنامه ریزی شده توسط الگوریتم های ACO در بالا از یک سری بخش های خط شکسته تشکیل شده است. برای تعیین مسیر امکان پذیر، باید مسیر را با یک سری عملیات بهینه کنیم.
4.4.1. فشرده سازی مسیر
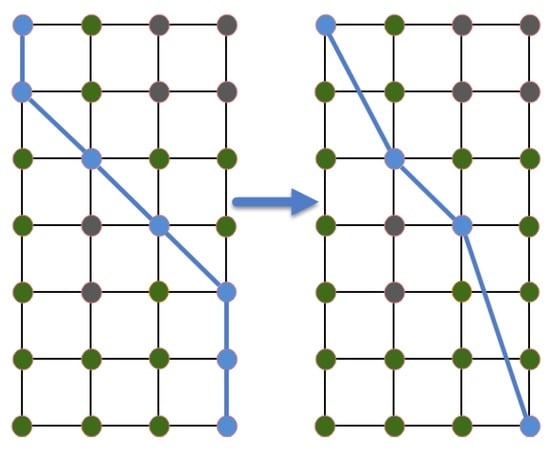
برای جلوگیری از چرخش مکرر پهپاد، باید نقاط بین راه را فشرده کنید، همانطور که در شکل 10 نشان داده شده است . هنگامی که خط شکسته فشرده می شود، کوتاهتر از مسیر اصلی برنامه ریزی شده توسط الگوریتم جستجوی شبکه ای خواهد بود. با فشرده سازی مسیر، خطاها معرفی می شوند. با این حال، مسیر تا حدی بهینه شده است.
هنگام فشرده سازی ایستگاه های بین راه، مسیر تنظیم شده نباید از منطقه مورد تهدید عبور کند و میانگین ارتفاع مسیر بهبود قابل توجهی نداشته است. پس از حذف ایستگاه بین راه [ خطای پردازش ریاضی ]rمن، مسیر باید معیارهای زیر را داشته باشد: (الف) بخش های مسیر تنظیم شده [ خطای پردازش ریاضی ]{rمن–1، rمن+1}نباید در منطقه مورد تهدید قرار گیرد و (ب) مقدار اختلاف میانگین ارتفاع بین [ خطای پردازش ریاضی ]{rمن–1،rمن+1}و [ خطای پردازش ریاضی ]{rمن–1، rمن، rمن+1} نباید از آستانه مشخص شده تجاوز کند [ خطای پردازش ریاضی ]£. میانگین ارتفاع به صورت زیر محاسبه می شود: درونیابی برای مسیر با فاصله [ خطای پردازش ریاضی ]∀که در [ خطای پردازش ریاضی ]Ʊ3، سپس نقاط فاصله را به تبدیل کنید [ خطای پردازش ریاضی ]Ψ3و ارتفاع زمین را برای آنها بدست آورید.
این مقاله الگوریتم داگلاس-پیکر [ 36 ] را بهبود می بخشد. مراحل بهبود الگوریتم به شرح زیر است:
-
ابتدا، الگوریتم فاصله بین هر نقطه راه و خط پیوند دو نقطه پایانی را مقایسه می کند. اگر فاصله کمتر از تحمل باشد [ خطای پردازش ریاضی ]�، بخش مسیر را قضاوت کنید تا مشخص شود که آیا شرایط (الف) و (ب) پس از حذف این نقطه بین وجود دارد یا خیر. اگر راضی بودید، این نقطه را حذف کنید و اگر نه، آن را نگه دارید.
-
نقطه ای را که دارای دورترین فاصله با خط پیوند دو نقطه انتهایی است به عنوان نقطه جدایی انتخاب کنید تا مسیر به دو بخش تقسیم شود و سپس مرحله 1 را به صورت بازگشتی برای این دو بخش انجام دهید تا جایی که هیچ نقطه ای برای حذف وجود نداشته باشد.
4.4.2. چرخش مسیر هموار
پس از فشرده سازی، مسیر همچنان از خطوط شکسته تشکیل شده است. پهپاد نمی تواند فرآیند چرخش را به آرامی کامل کند. برخی از روشهای برازش بخش متداول وجود دارد، مانند منحنی دوبین [ 15 ] و منحنی بزیه [ 2 ]، و برخی از نویسندگان خط شکسته را هموار نمیکنند [ 12 ]. در واقع، یک Fly-by Fix یا Fly-over Fix [ 22 ] معمولاً در روش های پرواز PBN برای چرخش استفاده می شود. در این مطالعه از Fly-by Fix برای چرخش صاف پهپاد استفاده می کنیم. در شکل 11 الف، [ خطای پردازش ریاضی ]DTAطول حداقل بخش مسیر مستقیم مورد نیاز Fly-by Fix است. با سرعت پرواز، زاویه چرخش و سایر پارامترها تعیین می شود و به صورت زیر محاسبه می شود:
جایی که [ خطای پردازش ریاضی ]آرشعاع چرخش است، [ خطای پردازش ریاضی ]VKTASسرعت واقعی هوا است، [ خطای پردازش ریاضی ]VKTWباد دم است و [ خطای پردازش ریاضی ]�زاویه شیب است.
پرواز پهپاد تمایل دارد از بالا آمدن یا فرود مکرر جلوگیری کند. اگر یک پهپاد نیاز به پرواز از ایستگاه بین راه دارد [ خطای پردازش ریاضی ]آبه ایستگاه راه [ خطای پردازش ریاضی ]ببا ارتفاعات مختلف، پهپاد باید با حداکثر زاویه بالابر تا خط افقی بالا یا پایین بیاید [ خطای پردازش ریاضی ]بو سپس حفظ سطح پرواز به [ خطای پردازش ریاضی ]ب.
4.4.3. منطقه بافر مسیر
منطقه بافر مسیر یک بافر عمودی و افقی برای مسیر برای ایمنی پهپاد فراهم می کند. برای مناطق سایه نشان داده شده در شکل 11 ب، منطقه بافر مسیر، مسیر را به عنوان خط مرکزی، با عرض 4 × RNP در نظر می گیرد، و ارتفاع یک بافر مستطیلی است که برای غلبه بر مانع (ROC) لازم است. ما درون یابی را برای کل بافر انجام می دهیم. اگر اختلاف ارتفاع بین نقطه درون یابی و زمین کمتر از ROC باشد، ارتفاع نقطه راه باید افزایش یابد تا منطقه حائل مسیر، زمین و منطقه تهدید را قطع نکند.
5. نتایج و بحث
در این فصل، ابتدا پلتفرم و پارامترها را در بخش 5.1 معرفی میکنیم . آزمایشات آزمایشی با برنامه ریز مسیر در بخش 5.2 ، بخش 5.3 و بخش 5.4 گزارش شده است . در بخش 5.5 ، ما شش نوع برنامه ریز را با هم مقایسه می کنیم. برای مقایسه الگوریتمهای مختلف، ما تهدیدات پویا و الگوریتمهای اجتناب از تهدید پویا را از بخش 5.1 تا بخش 5.5 معرفی نمیکنیم . برنامه ریز در این مقاله در حال حاضر MACO-pl نام دارد. در بخش 5.6 ، تهدید پویا را معرفی کرده و عملکرد MACOD-pl را ارزیابی می کنیم.
5.1. پلت فرم و پارامترها
بر اساس روش های فوق، ما یک سیستم برنامه ریزی مسیر را بر اساس یک پلت فرم کره مجازی توسعه دادیم. این سیستم عملکردهای تعاملی مانند ورودی پارامتر، تولید مسیر، ویرایش مسیر، ارزیابی مسیر، مدل سازی تهدید، مدیریت داده، شبیه سازی پرواز و غیره را ارائه می دهد. برخی از اسکرین شات های تعاملی را می توان در پیوست A یافت . تمام آزمایشهای برنامهریزی مسیر که در ادامه میآیند در پلت فرم برنامهریزی مسیر ما تکمیل شدند. محیط سخت افزاری به شرح زیر بود: CPU: Core i7-4790; حافظه: 8 گیگابایت DDR3 1600 مگاهرتز. پارامترهای پرواز پهپاد در جدول 1 نشان داده شده است .
عرض منطقه بافر مسیر 2 × RNP = 0.5 نانومیل بود و [ خطای پردازش ریاضی ]ساعتحداکثرو [ خطای پردازش ریاضی ]ساعتدقیقهبه ترتیب 5000 و 0 بودند. زمان پردازش الگوریتم میانگین زمان سه آزمایش بود. در پیاده سازی الگوریتم از مهارت های برنامه نویسی مختلف، زبان های برنامه نویسی و کامپایلرها استفاده شده است که همه آنها تأثیر زیادی بر عملکرد دارند. در نتیجه، زمان پردازش تنها می تواند به عنوان مرجع استفاده شود.
تحقیقات و بحث های ادبی زیادی برای انتخاب پارامترها در الگوریتم ACO مورد بررسی قرار گرفت [ 37]. انتخاب پارامترها بر اساس تعداد زیادی آزمایش بود. برای یک کاربرد خاص، الگوریتم ACO به آزمایش های زیادی برای تعیین پارامترهای بهتر نیاز دارد. از طریق آزمایشها متوجه شدیم که زمان پردازش الگوریتم ACO با ضریب تبخیر نسبت معکوس دارد. با افزایش ضریب تبخیر، اثر بازخورد مثبت فرمون ها افزایش یافت. با این حال، افزایش ضریب تبخیر ممکن است باعث شود که الگوریتم در یک بهینه محلی فرو رود. اگر تعداد مورچه ها خیلی کم باشد، الگوریتم ممکن است زودتر از موعد پایان یابد. با این حال، تعداد زیاد مورچه ها می توانند زمان تکرار الگوریتم را افزایش دهند. در این مطالعه پارامترهای فرمون عبارتند از: ضریب نگهداری: [ خطای پردازش ریاضی ]� = 0.7; ضریب وزنی: [ خطای پردازش ریاضی ]� = 1، [ خطای پردازش ریاضی ]� = 4; شماره مورچه: 30; تعداد تکرار: 200; شماره گره n بین نقطه شروع و نقطه پایان. آستانه [ خطای پردازش ریاضی ]� = 10 متر; آستانه بالا بردن موضعی در فشرده سازی مسیر: [ خطای پردازش ریاضی ]£ = 10 متر; و فاصله درونیابی: [ خطای پردازش ریاضی ]∀ = 100 متر.
این آزمایش از پنج گروه مختصات استفاده کرد، همانطور که در جدول 2 نشان داده شده است .
فضای برنامه ریزی باید از قبل ایجاد شود و ویژگی ارتفاع گره را می توان به صورت آفلاین ذخیره کرد و بر اساس نیاز می توان از آن استفاده کرد. در این مطالعه، ما یک فضای برنامه ریزی چند دانه ای ایجاد کردیم. محدوده طول جغرافیایی از پیش تولید شده [90، 125] و محدوده عرض جغرافیایی از پیش تولید شده [15، 45] بود که مربوط به بیش از 10،000،000 کیلومتر مربع منطقه برنامه ریزی است. در عرض شبکه 0.01 درجه، تعداد گره ها 10،500،000 بود و فضای شبکه تقریباً به 5 دقیقه نیاز داشت تا در ماشین آزمایشی ایجاد شود. قبل از اجرای الگوریتم برنامه ریزی، می توانیم بلوک آفلاین مربوطه را بر اساس اندازه فضای برنامه ریزی بارگذاری کنیم.
شکل 12 منطقه برنامه ریزی اولین گروه مختصات آزمایشی را نشان می دهد. منطقه توسط نقاط (100.284، 27.622)، (100.047، 26.723)، (99.093، 26.920)، (99.295، 27.812) احاطه شده است. نکته ها [ خطای پردازش ریاضی ]آو [ خطای پردازش ریاضی ]ببه ترتیب نقطه شروع و پایان بودند.
5.2. مسیر اولیه را دریافت کنید
پارامتر [ خطای پردازش ریاضی ]�توانایی دنبال کردن دره و طول مسیر را متعادل می کند. با تعیین ضرایب مختلف می توان نتایج تجربی مختلفی را به دست آورد. ارتفاع اولیه مسیر مجموع ارتفاع گره و مقدار ROC است. نتایج تجربی در شکل 13 و جدول 3 نشان داده شده است . می توان نتیجه گرفت که وقتی [ خطای پردازش ریاضی ]�نسبتا بالا بود، عملکرد الگوریتم پیروی از دره بهتر بود. با این حال، بالاتر [ خطای پردازش ریاضی ]�دشواری مورچه برای رسیدن به نقطه پایان را افزایش می دهد، که همچنین زمان اجرای الگوریتم را افزایش می دهد. چه زمانی [ خطای پردازش ریاضی ]�0 بود، الگوریتم کوتاه ترین مسیر را محاسبه کرد. با این حال، به دلیل تاثیر توپوگرافی نامنظم و فضای شبکه، مسیر طولانیتر از کوتاهترین مسیر در جهان پیوسته بود. چه زمانی [ خطای پردازش ریاضی ]� ≥ 3، ممکن است راه حل عملی به دست نیاید. مقادیر مناسب از [ خطای پردازش ریاضی ]�را می توان با توجه به الزامات برنامه انتخاب کرد. برای آزمایش های زیر انتخاب کردیم [ خطای پردازش ریاضی ]� = 2.
شکل 14 نتایج همگرایی الگوریتم MACO را نشان می دهد که [ خطای پردازش ریاضی ]� = 2.
5.3. بهینه سازی مسیر
5.3.1. فشرده سازی مسیر
نتایج شکل 13 c ابتدا با فشرده سازی بهینه شد. همانطور که در شکل 15 و جدول 4 نشان داده شده است ، نتایج متفاوتی با تنظیم تلرانس متفاوت به دست آمد. [ خطای پردازش ریاضی ]�.
جدول 4 نشان می دهد که طول مسیر فشرده ممکن است کوتاه تر از کوتاه ترین مسیر بدست آمده توسط الگوریتم ACO در جدول 3 بوده باشد .
در تأثیر تحمل هم مزایا و هم معایبی وجود دارد و تلورانس باید بر اساس نیازهای واقعی انتخاب شود.
5.3.2. چرخش مسیر هموار
همانطور که شکل 16 نشان می دهد، ما از معادله (16) و Fly-by Fix برای رسیدگی به تمام گوشه های چرخش پهپاد استفاده کردیم. با توجه به نتایج شکل 16 ، طول مسیر پس از تعدیل 115.495 کیلومتر با میانگین ارتفاع زمین 2142.80 متر بود. منحنی چرخش مجموعه ای از نقاط کنترل مسیر با فاصله 50 متر است.
5.3.3. مناطق بافر مسیر
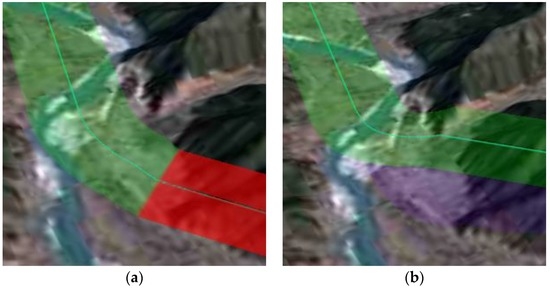
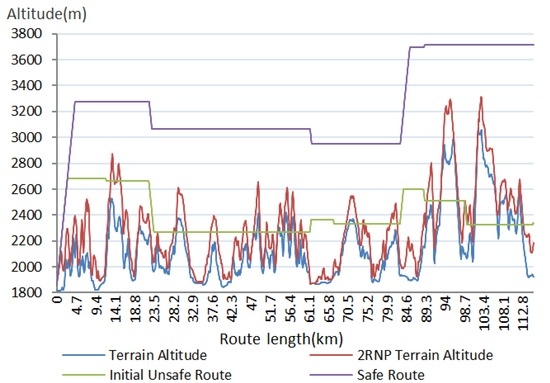
شکل 17 الف نتیجه معرفی مناطق بافر مسیر است. قسمتی از مسیر که الزامات ایمنی پرواز را برآورده نمی کند با رنگ قرمز مشخص شده است. شکل 17 ب نتیجه پس از تنظیم ارتفاع است. پس از معرفی منطقه حائل مسیر، طول مسیر به 115.609 کیلومتر با ارتفاع متوسط 3228.90 متر و ارتفاع متوسط زمین 2142.50 متر تنظیم شد. شکل 18 شکل عمودی مسیر و زمین است. منحنی ارتفاع زمین ارتفاع زمینی است که مسیر برنامه ریزی از آن عبور می کند و منحنی ارتفاع زمین 2RNP بالاترین ارتفاع زمین در محدوده 2RNP است. مسیر اولیه ناامن بود. ما یک مسیر امن را به دست آوردیم که می تواند الزامات ایمنی را پس از تنظیم ارتفاع برآورده کند.
پس از بهینه سازی مسیر، [ خطای پردازش ریاضی ]Lایالات متحده= 0; با این حال میانگین ارتفاع مسیر تغییر کرد و میانگین ارتفاع زمین عبور شده توسط پهپاد نیز تغییر کرد. همانطور که در بخش 3.4.1 ذکر شد، خطاهای معرفی شده توسط فرآیند بهینهسازی ممکن است باعث شود مسیری از ناحیه تهدید عبور کند ، و بنابراین وقتی در فضای برنامهریزی نقشهبرداری میشود، ناحیه تهدید باید گسترش یابد. عرض گسترش منطقه تهدید باید بیشتر از خطای عملکرد ناوبری (0.5 نانومیل) باشد. عرض انبساط مربوطه در فضای برنامه ریزی عرض شبکه 0.01 درجه 1 گره بود.
5.4. نتایج چند دانه بندی
در بخش 3.4.2 ، یک فضای برنامه ریزی چند دانه بندی مناسب برای کاربردهای مختلف را معرفی کردیم. بر اساس شبکه های مختلف، نتایج تجربی در جدول 5 نشان داده شده است .
با کاهش عرض شبکه و نزدیکتر شدن فضای برنامه ریزی به دنیای واقعی، مسیری که به دست آوردیم با واقعیت سازگارتر بود. الگوریتم کندتر اجرا شد. با این حال، زمانی که عرض شبکه به مقدار معینی که توسط عواملی مانند پارامترهای ورودی و منبع دادههای زمین تجربی محدود میشود کاهش یافت، نتایج دیگر بهبود نیافتند. در صحنه آزمایش نشان داده شده در شکل 19 ، زمانی که عرض شبکه 0.005 درجه بود، اثر بهتری به دست آمد. [ خطای پردازش ریاضی ]�0.50 نانومتر بود. آزمایش های زیر بر اساس این پارامترها انجام می شود.
5.5. آزمایش های مقایسه
در پلتفرم کره مجازی خود ما همچنین برنامهریز مسیر مدل اصلی فرمون ACO به نام ACO-pl و مدل فرمون مبتنی بر رتبه با نام RAS-pl را پیادهسازی کردیم. تعداد مورچههای نگهدارنده RAS-pl 5 عدد بود. ما از روش محلی درهای که در بخش 4.2.2 توضیح داده شد و کوتاهترین فاصله از هدف به عنوان تابع اکتشافی برای تحقق یک برنامهریز مبتنی بر A* به نام A*-pl استفاده کردیم. .
علاوه بر این، ما برنامهریزهای مبتنی بر PSO و EA را به ترتیب به نامهای PSO-pl و EA-pl پیادهسازی کردیم. از آنجا که این دو روش از روش رمزگذاری کاهش ابعاد برای دستیابی به محاسبات تکاملی استفاده میکنند، روش محلی دنبالهروی دره در بخش 4.2.2 قابل اجرا نبود. این مطالعه از روش حداقل ارتفاع پرواز در [ 12 ] برای به روز رسانی میانگین ارتفاع مسیر استفاده کرد. به دلیل تفاوت فاصله بین نقاط مجاور، هنگام محاسبه میانگین ارتفاع، درون یابی فاصله برای مسیر مورد نیاز بود. در آزمایشهای زیر، ضریب وزنی اینرسی PSO-pl از 0.9 تا 0.4 خطی بود. تعداد تکرار PSO-pl و EA-pl 200 و اندازه جمعیت 30 بود.
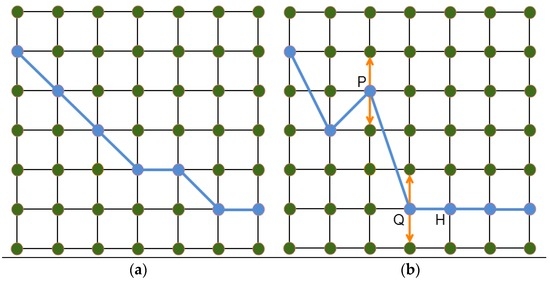
هنگام اجرای شش نوع برنامه ریز، این مطالعه از ساختارهای داده برای ذخیره فواصل از پیش محاسبه شده بین گره های مجاور و فواصل از پیش محاسبه شده بین هر گره و گره انتهایی استفاده کرد. ایستگاه های مسیر مجاور در MACO-pl، ACO-pl، RAS-pl و A*-pl گره های مجاور در فضای برنامه ریزی شبکه هستند، همانطور که در شکل 20 a نشان داده شده است. الگوریتم پیشنهادی و مورد استفاده در این مطالعه به شتاب محاسباتی دست یافت. در حالی که ایستگاه های مسیر مجاور در PSO-pl و EA-pl لزوما گره های مجاور نیستند، همانطور که در همانطور که در شکل 20b نشان داده شده است، نقاط بین P و Q فقط می توانند در دو جهت حرکت کنند. در این مرحله، P و Q گره های مجاور نیستند و بنابراین فاصله ها باید محاسبه شوند. اگرچه نقاط راه Q و H گره های مجاور هستند، اما می توانیم فاصله بین Q و H را با جستجوی جدول بدست آوریم.
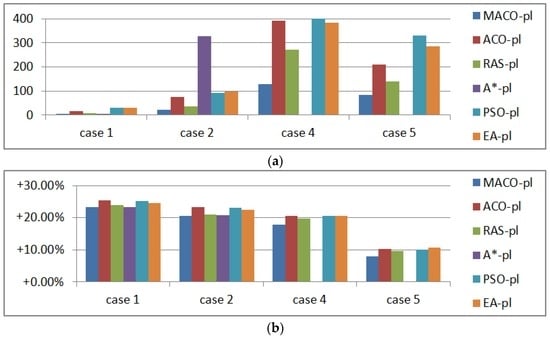
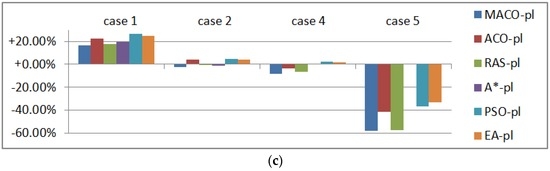
آزمایشهای مقایسه از همان اندازه شبکه و پارامترهای پهپاد استفاده کردند و برای گروههای مختصات مختلف انجام شدند. نتایج در جدول 6 و شکل 21 نشان داده شده است .
مدل تبخیر فرمون ACO-pl به راحتی منجر به برنامه ریزی مسیر محلی بهینه شد. در مقایسه با ACO-pl، RAS-pl از نتایج مورچه های با رتبه بالاتر استفاده کرد و توانایی اکتشاف بهتری داشت. الگوریتم A* در حل یک مشکل ساده ترین مسیر بسیار کارآمد است. با این حال، عملکرد این الگوریتم با معرفی زمین محلی کاهش یافت. A*-pl می تواند راه حل های خوبی در صحنه های کوچک داشته باشد. با این حال، میز باز آن زمانی که صحنه بزرگتر و پیچیده تر شد، به طور فزاینده ای بزرگ شد. اگرچه برای سرعت بخشیدن به پرس و جو یک پشته باینری معرفی کردیم، یافتن راه حل بسیار دشوار بود. تواناییهای EA-pl و PSO-pl برای دنبال کردن دره به خوبی نبودند. با این حال، عملکرد برای ارتفاع و طول این روش ها نسبتا متعادل بود. علاوه بر این، EA-pl و PSO-pl به دلیل درون یابی مکرر و محاسبه فاصله، کارایی کمتری نسبت به MACO-pl داشتند. در مقایسه با الگوریتم A*، برنامه ریزان هوشمند مزایایی در حل مسائل پیچیده در مقیاس بزرگ دارند. ما با مقایسهها نشان دادیم که MACO-pl راهحل بهتری تولید کرده و الگوریتم کارآمدتر است.
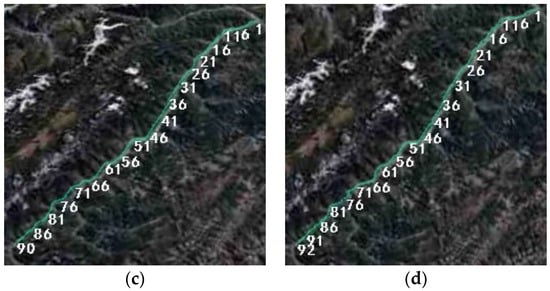
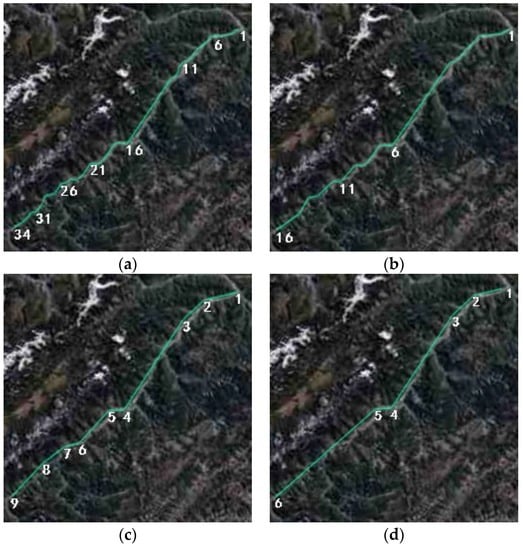
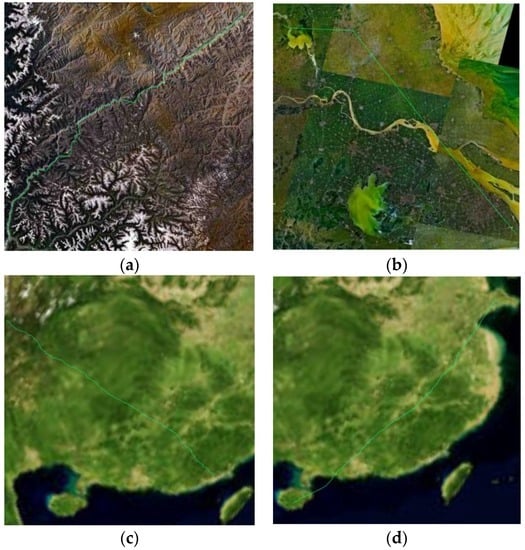
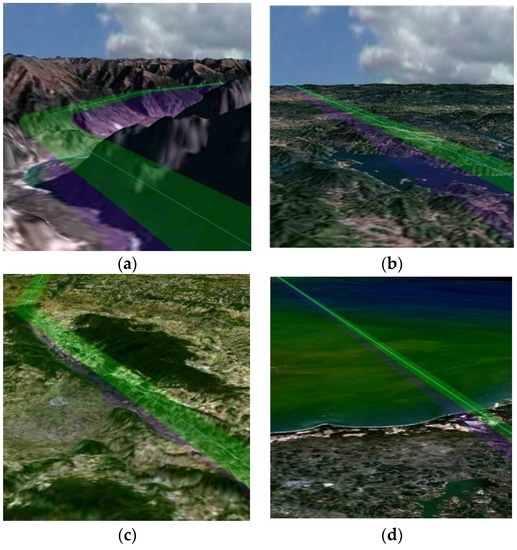
شکل 22 نتایج MACO-pl را نشان می دهد. در ناحیه شکل 22 الف، برنامه ریز می تواند روند زمین در دره را ردیابی کند که نشان دهنده توانایی ردیابی بهتر زمین است. شکل 22 ب بیشتر منطقه دشتی است و روند مسیر نسبتاً مستقیم بود. شکل 22 c,d نتایج برنامه ریزی را در سناریوهای برنامه ریزی در مقیاس بزرگ نشان می دهد. شکل 23 برخی از جزئیات محلی این مسیرها را نشان می دهد.
پس از علامت گذاری منطقه راداری، منطقه پرواز ممنوع و منطقه تهدید موشکی، آزمایشاتی را روی گروه های مختصات 1، 2، 4 و 5 انجام دادیم. جدول 7 و شکل 24 نتایج برنامه ریزان مختلف را نشان می دهد. ما نشان دادیم که MACO-pl راه حل بهتری دارد. شکل 25 نتایج محلی را توسط MACO-pl از چهار گروه مختصات پس از ترسیم مناطق در معرض خطر نشان می دهد. مسیرهای برنامه ریزی شده می توانند از شرایط زمین برای اجتناب از منطقه در معرض خطر استفاده کنند.
5.6. آزمایشهایی روی Dynamic MACO
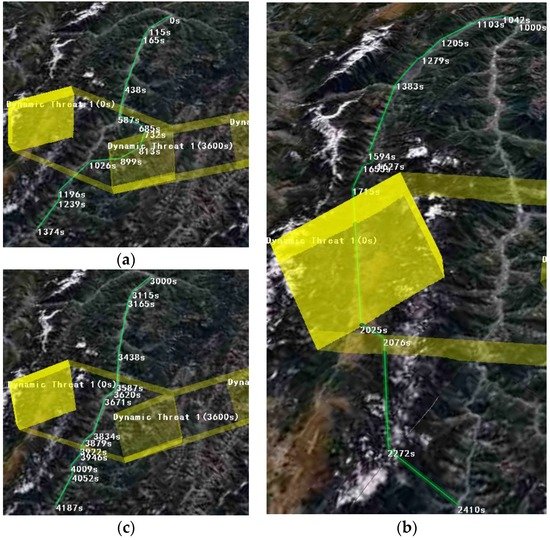
این بخش حوزه تهدید پویا را که در بخش 3.3 مورد بحث قرار گرفت معرفی می کند . بر اساس MACOD-pl، ما از گروه مختصات 1 برای آزمایش الگوریتم استفاده کردیم. با توجه به اینکه الگوریتمهای بهینهسازی مسیر تقریباً 3-1 درصد خطا به طول مسیر اولیه میآورد که در سناریوی فعلی تقریباً 1 تا 4 کیلومتر است، حداکثر خطای زمانی تقریباً 40 ثانیه و سرعت حرکت تهدید پویا بود. مساحت در شکل تقریباً 12.6 متر بر ثانیه بود. بنابراین حداکثر دامنه خطا تقریباً 510 متر بود. برای اطمینان از ایمنی مسیر، مرز منطقه تهدید پویا 0.01 درجه گسترش یافت. همانطور که در شکل 26 و جدول 8 نشان داده شده استزمانی که زمان شروع پهپاد یکسان نبود، پهپاد میتوانست در زمانها و مکانهای مختلف با تهدید مقابله کند و بنابراین مسیرهای برنامهریزی شده متفاوت بود. زمانی که زمان شروع پهپاد بین 0 تا 2000 ثانیه بود، منطقه تهدید پویا مانع از پرواز پهپاد در منطقه دره می شد. زمانی که زمان شروع پهپاد 3000 ثانیه بود، منطقه تهدید پویا از منطقه دره عبور می کرد و نتیجه برنامه ریزی مسیر مشابه نتیجه بدون تهدید بود. به دلیل معرفی تهدیدات پویا، الگوریتم اجتناب از تهدید پویا نیاز به مصرف بسیاری از منابع محاسباتی داشت و بازده عملیاتی الگوریتم MACOD-pl بسیار کمتر از الگوریتم MACO-pl بود.
6. نتیجه گیری و کار آینده
این مقاله یک برنامهریز مبتنی بر ACO مبتنی بر پلتفرم کره مجازی را برای حل مشکل برنامهریزی مسیر در محیطهای پرخطر ارائه میکند. ما یک سیستم برنامهریزی مسیر توسعه دادیم و شش برنامهریز مختلف را در تهدید استاتیک شناسایی کردیم. با تجزیه و تحلیل تجربی، ما نشان دادیم که برنامه ریز بهینه ما از نظر مصرف سوخت، پوشش زمین و اجتناب از خطر عملکرد بهتری دارد. در نهایت، ما اثربخشی MACOD-pl را در محیط تهدید پویا نشان دادیم. با بهره مندی از پلتفرم کره مجازی، روش ارائه شده در این مقاله می تواند به برنامه ریزی مسیر در سطح جهانی دست یابد و حداکثر شعاع جنگی فعلی پهپادها در میدان های نبرد را برآورده کند. مسیر برنامه ریزی شده می تواند به طور موثر از تهدیدات مختلف جلوگیری کند و با تغییر پارامترها، برنامه ریز برای نفوذ نظامی، جستجو و نجات مناسب است. و بسیاری از سناریوهای دیگر سیستم برنامه ریزی مسیر ما نه تنها می تواند برنامه ریزی خودکار، بلکه ویرایش و ذخیره سازی مسیر، آزمایش های شبیه سازی پرواز و سایر وظایف را نیز انجام دهد.
بسیاری از انواع دیگر الگوریتم های برنامه ریزی وجود دارد. به عنوان مثال، برخی از الگوریتم ها از یک قاب مختصات چرخشی برای کاهش ابعاد مسئله استفاده می کنند [ 12 ، 18 ]. تحقیقات بیشتر در مورد چگونگی اعمال الگوریتم های دیگر در پلت فرم کره مجازی و به دست آوردن موثر نتایج بهتر و همچنین تحقیقات بیشتر در مورد مدل تهدیدات پویا مختلف و استفاده کارآمد از الگوریتم های پویا اجتناب از تهدید ارزشمند خواهد بود.













بدون نظر