

چکیده
منطقه بالقوه برای فتوسنتز در آب های طبیعی به یک لایه نسبتاً نازک آب سطحی روشن محدود می شود. ضخامت این لایه اغلب به طور غیرمستقیم با اندازه گیری عمقی که در آن 1٪ از تشعشعات فعال فتوسنتزی وارد آب می شود، تخمین زده می شود. از این عمق به عنوان عمق سرخوشی یاد می شود. یک روش درشتتر برای ارزیابی نفوذ نور زیر آب، اندازهگیری عمق Secchi است که یک معیار بصری شفافیت آب است. رابطه عددی بین این دو پارامتر نوری یعنی ضریب تبدیل m، با توجه به تغییرات خواص نوری آب به ویژه در آب های ساحلی انتقالی متفاوت است. هدف از مطالعه ما ارزیابی این است که کدام معیار مناسبترین معیار برای استناد به این ضرایب است. ما نه روش را آزمایش کردیم که هفت روش به صورت محلی با دادههای درجا خودمان از سواحل مجمعالجزایر دریای بالتیک در جنوب غربی فنلاند کالیبره شدند. ما با استفاده از روشهای مقیاسپذیر و کالیبرهشده محلی بهجای یک ضریب ثابت، توانستیم دقت مدلسازی اعماق سرخوشی را از اعماق Secchi به طور قابلتوجهی بهبود دهیم. بهترین نتایج با استفاده از روش هایی، اعم از توابع پیوسته یا سری از ثابت ها، که بر اساس مقادیر شفافیت آب هستند، به دست آمد.
کلید واژه ها:
عمق Secchi ; عمق سرخوشی ؛ بهینه سازی روش ; دقت مدل سازی ; آب های ساحلی ؛ دریای بالتیک
1. مقدمه
نور زیر آب یک متغیر محیطی مهم است زیرا در دسترس بودن کم آن فعالیت فتوسنتزی و در نتیجه تولید اولیه اکوسیستم آبی را محدود می کند [ 1 ]. نور توسط مولکول های آب، ذرات معلق (SPM)، مواد آلی محلول رنگی (CDOM، مواد زرد)، و کلروفیل همراه با دیگر رنگدانه های فتوسنتزی فیتوپلانکتون های زنده ضعیف می شود. هر یک از این اجزا نور از طول موج های مختلف را تضعیف می کند و برخی از اجزا در درجه اول جاذب و برخی پراکنده هستند. به عنوان مثال، مواد محلول در درجه اول نور را جذب می کنند، ذرات معلق پراکنده می شوند و سلول های فتوسنتز کننده هر دو را انجام می دهند [ 1 ].
به دلیل تضعیف کارآمد در آب های طبیعی، لایه سطحی روشن و در نتیجه منطقه بالقوه برای فتوسنتز، نسبتاً نازک است. ضخامت لایه آب فعال فتوسنتزی را می توان با مقایسه مقادیر تولید فوتواتوتروف و مصرف هتروتروف ارزیابی کرد، اما همچنین می توان آن را با اندازه گیری مقدار نور در ستون آب به طور تقریبی تخمین زد، به عنوان مثال، [ 1 ]. یک متغیر رایج عمق سرخوشی ( Zeu ) است که با اندازهگیری عمقی که در آن 1% از تشعشعات فعال فتوسنتزی (PAR، 400-700 نانومتر) وارد آب میشود ، تعیین نسبتاً آسان و دقیق است [ 2 ].
روش دیگر برای ارزیابی نفوذ نور زیر آب، اندازه گیری عمق Secchi ( Z SD ) است، که عمقی است که در آن یک دیسک سفید Secchi از دید ناپدید می شود. Z SD یک اندازه گیری بصری برای ارائه یک متغیر عددی است که شفافیت آب را توصیف می کند [ 3]. استفاده از اندازه گیری دیسک Secchi یک روش سنتی و رایج در برنامه های رصد و پایش دریایی است. این یک روش آسان، ارزان و سرراست است، و بنابراین اغلب در یک برنامه میدانی گنجانده شده است – اگر نه به عنوان تمرکز اصلی مطالعه خاص، حداقل به عنوان یک متغیر پس زمینه برای توصیف شرایط حاکم. با این حال، روش نسبتاً درشت است. در مقایسه با اندازهگیریهای مستقیم PAR، قرائتهای Secchi بیشتر مستعد عدم دقت اندازهگیری هستند که بهعنوان مثال، ناهمواری سطح، شرایط عمومی روشنایی یا تفسیر انسانی ایجاد میشوند. قبل از انجام هر مقایسه ای باید منابع احتمالی خطا را تایید کرد.
خوانشهای دیسک Secchi و حسگرهای نور زیر آب به تغییرات در تعادل جذب/پراکندگی واکنشهای متفاوتی نشان میدهند، به عنوان مثال ، تغییرات در مقادیر نسبی، به عنوان مثال، SPM و CDOM در آب ([ 4 ] و منابع موجود در آن). در نتیجه، رابطه بین پارامترهای نوری، یا در این مورد نسبت Z eu : Z SD ، با توجه به تغییرات در خواص نوری آب متفاوت است، به عنوان مثال، [ 1 ، 4 ، 5 ، 6 ]. همبستگی بین پارامترها در ساده ترین شکل به صورت زیر بیان می شود:
Z eu = m × Z SD
مقادیر گزارش شده ضریب تبدیل، m ، معمولاً از کمتر از 1 تا 5 یا حتی 10 متغیر است ([ 4 ] و مراجع در آن). برای مثال، هولمز [ 7 ] ضریب 3 را به عنوان یک ضریب عمومی مناسب در آبهای گل آلود پیشنهاد میکند، اما در عین حال اضافه میکند که ضریب بالاتر برای آبهای کدرتر و ضریب کمتر برای آبهای شفافتر بهتر است. آب ها
پرایزندوفر [ 3 ] از تلاش برای ایجاد ضرایب برای تبدیل Z SD به Z eu انتقاد کرده است . او استدلال میکند که اگر ابزارهایی برای اندازهگیریهای نوری با کیفیت بالاتر در ارزیابی فاکتورها مورد نیاز است، باید از آنها برای اندازهگیری مستقیم میدان نوری زیر آب استفاده شود. این یک جمله معتبر است. با این حال، از آنجایی که اندازهگیریهای PAR در زیر آب به ابزار و دانش خاصی نیاز دارند، و علیرغم محبوبیت فزاینده آنها در بررسیهای معمول اقیانوسها، هنوز کمتر از اندازهگیریهای Z SD انجام میشوند. در عوض، اندازهگیری عمق Secchi همچنان یک روش عادی در هر کمپین نمونهبرداری دریایی است. علاوه بر این، تاریخچه Z SDروش بسیار طولانی تر از روش های مدرن اندازه گیری نوری است. اولین اندازه گیری ها در اوایل قرن 19 انجام شد [ 8 ]. هر زمان و هر جا که اندازهگیریهای دیسک Secchi تنها دادههای نوری موجود باشد، بسیار ارزشمند هستند، زیرا حداقل اطلاعاتی در مورد شرایط نوری زیر آب ارائه میدهند – برخلاف هیچ چیز.
در مجموع، دادههای Z SD در ابعاد مکانی و زمانی بسیار بیشتر از دادههای مربوط به اعماق افوتیک یا ضرایب تضعیف هستند [ 8 ]. با تعریف ارتباط کمی بین Z SD و سایر پارامترها، داده های Z SD بیش از حد، موجود و پیوسته انباشته شده را می توان به طور موثرتری مورد استفاده قرار داد. هولمز [ 7 ] اشاره کرد که زیست شناسان ممکن است به همان درجه بالایی از دقت و دقت مورد نیاز اقیانوس شناسان نوری نیاز نداشته باشند، و بنابراین Z SDتبدیلها – با وجود محدودیتهایشان – ممکن است در انواع خاصی از مطالعه مفید باشند. علاوه بر این، در شرایط ساحلی بسیار متغیر و دائماً در حال نوسان، دقت مطلق اندازهگیریهای نقطهای حتی میتواند بهعنوان بیربط دیده شود اگر آنها فقط شرایط بسیار محلی و بسیار لحظهای را نشان دهند [ 9 ].
با توجه به دلایل ذکر شده در بالا، محققان بدون شک به تبدیل اندازه گیری های Z SD به تخمین Z eu ادامه خواهند داد. در برخی موارد، مانند تاریخگذاری دادههای تاریخی Secchi قبل از در دسترس بودن دادههای سنجش از راه دور یا حسگرهای نور زیر آب، تبدیل Z SD به Z eu تنها راه برای بهدست آوردن اطلاعات در مورد عمق سرخوشی است. در حالی که توصیه می شود در صورت امکان از تجهیزات نوری استفاده کنید، اما Z SD هنوز اجتناب ناپذیر استتا حد زیادی، رایج ترین معیار شرایط نوری زیر آب نیز در آینده خواهد بود. به جای تلاش برای سرکوب رویه رایج، هدف بهینه سازی آن را مهم می دانیم. نتایج تبدیل غیرمستقیم اطلاعات قابل اعتماد تری در مورد ضخامت لایه تولیدی نسبت به استفاده از عمق Secchi ارائه می دهد.
سیستم های اطلاعات جغرافیایی (GIS) به طور گسترده در تحقیقات دریایی، به ویژه در مناطق ساحلی استفاده می شود. دادههای مکانی و روشهای مدلسازی به درک اکوسیستمهای دریایی از محیطهای ساحلی تا اعماق دریا میافزایند. مشخصه دریاهای کم عمق ساحلی، منطقه سرخوشی، وقوع و توزیع عمق زیستگاه های بستر دریا را تنظیم می کند. به عنوان مثال، در منطقه مورد مطالعه ما، سطح بستر دریای سرخوشی تقریباً 100٪ از حداقل تا حداکثر سالانه در نوسان است [ 10 ]. به عنوان Z euیک متغیر کلیدی در هر مدلی در رابطه با محیط زیست دریایی است که استفاده از آن در مدلسازی GIS نیز رو به افزایش است. این امر مستلزم پارامترسازی بهینه پدیده، از جمله درک بهتر ویژگیهای فضایی شفافیت آب و نیروهای محرک آن است.
در این مقاله، ما روشهای جایگزین برای تعیین ضرایب بین Z SD و Z eu را با استفاده از خودمان در محل مقایسه میکنیم.داده ها از سواحل مجمع الجزایر دریای بالتیک در جنوب غربی فنلاند. هدف ارزیابی است که مناسب ترین معیار برای استناد ضریب بر آن است. از آنجایی که درک اهمیت کالیبراسیون تجربی محلی حیاتی است، ما هیچ ضرایب کلی ارائه نمی دهیم. در عوض، ما دادههای تجربی خود را با جزئیات مطالعه میکنیم و از محققان میخواهیم که مناسبترین روش تبدیل را برای مناطق مورد مطالعه خاص خود به طور انتقادی در نظر بگیرند. روش تبدیل ممکن است در شرایط ساحلی اقیانوسی نسبتاً ساده باشد، اما ما میخواهیم به محیطهای ساحلی انتقالی با کیفیت آب متفاوتتر توجه بیشتری داشته باشیم.
2. مواد و روشها
2.1. اندازه گیری درجا
هر دو عمق Secchi و عمق euphotic با نمونه برداری در محل با استفاده از یک قایق کوچک (طول ~ 5 متر) جمع آوری شد. شفافیت آب با استفاده از دیسک سفید Secchi اندازه گیری شد و نتایج توسط همان فرد با دقت 0.1 متر ثبت شد. در تعیین کمیت اعماق سرخوشی، از مجموعه ابزاری متشکل از دو حسگر کوانتومی LI-COR (LI-COR Biosciences, Lincoln, NE, USA) استفاده کردیم که میزان تابش (μmol·s -1 ·m- 2 ) را در منطقه طول موج 400-700 نانومتر، به عنوان مثال، مقادیر یکپارچه طیفی PAR. مقدار نور زیر آب با سنسور کوانتومی کروی (مدل LI-193) اندازه گیری شد. در مقایسه با اندازهگیریهای PAR downwelling، اندازهگیریهای تابش اسکالر در مطالعات مربوط به فتوسنتز [ 1 ] عملیتر هستند و نسبت به تغییرات زاویه ارتفاع خورشیدی حساس نیستند [ 11 ]]. به طور همزمان، سنسور کوانتومی زمینی (مدل LI-190، جمعآورنده کسینوس) برای مشاهده تغییرات در شار تابشی ورودی بالای سطح دریا و نرمالسازی ریاضی شار بهگونهای که اندازهگیریهای زیر آب با یکدیگر قابل مقایسه باشد، استفاده شد. اندازهگیریها بین ساعت 08:00 تا 19:00، به وقت محلی در تابستان انجام شد. زمانبندیها در رابطه با زوایای ارتفاع خورشیدی در فصل تابستان در عرض جغرافیایی 60 درجه شمالی مناسب در نظر گرفته شد.
اندازهگیریهای زیر آب با ثبت قرائتهای PAR درست در زیر سطح دریا آغاز شد و با فاصله یک متری به سمت پایین پیش رفت. حداکثر عمق اندازهگیری با عمق ایستگاه نمونهبرداری مربوطه تعیین شد، اما هرگز از 20 متر تجاوز نکرد. در کم عمق ترین ایستگاه نمونه برداری، محدوده اندازه گیری 0-5 متر بود. حداقل سه اندازهگیری جداگانه از هر عمق با دیتالاگر LI-1400 (LI-COR Biosciences، لینکلن، NE، ایالات متحده آمریکا) ثبت شد. نقاط پرت که بیش از 20٪ از میانه عمق خاص منحرف شده بودند، حذف شدند و میانگین اندازه گیری های باقی مانده به عنوان مقادیر نهایی برای هر عمق اندازه گیری استفاده شد. سپس از این پروفیلهای نور برای محاسبه حد پایین ناحیه افوتیک طبق قانون نفوذ 1٪ PAR استفاده شد (برای شرح روش دقیق،12 ]).
به منظور گنجاندن شرایط متغیر نور زیر آب در دادهها، ما یک کارزار میدانی انجام دادیم که هم تغییرات مکانی و هم زمانی در خواص نوری آبهای مجمعالجزایر ساحلی دریای بالتیک را پوشش میدهد. این کمپین در بخش شمال شرقی مجمع الجزایر جنوب غربی-فنلاند انجام شد که شرایط کیفیت آب بسیار متغیر را در فواصل نسبتاً کوچک فراهم می کند. از نظر نوری، دریای بالتیک نشان دهنده آب های Case-2 با غلظت CDOM نسبتاً بالا است [ 13 ، 14 ]. مقادیر SPM و کلروفیل در منطقه مورد مطالعه تغییرات مکانی-زمانی زیادی را تجربه می کنند [ 12 ، 15 ].
کمپین داده های آموزشی اولیه شامل 11 ایستگاه نمونه برداری بود که در یک منطقه 45 کیلومتر در 40 کیلومتر، با فواصل 7-16 کیلومتری ایستگاه های مجاور را از هم جدا می کردند ( شکل 1 ). از اواخر آوریل تا اوایل اکتبر سال 2010 هر سه هفته یکبار از ایستگاه ها (به استثنای یک استثنا) بازدید می شد که در نتیجه 8 بازدید در هر کدام انجام شد. در مجموع، تا 88 نمایه نور جداگانه همراه با مقادیر Z SD اضافه می شود.
برای ارزیابی کاربرد روشهای تبدیل کالیبرهشده، ما همچنین از دادههای آزمایش مستقل از سال 2011 استفاده کردیم. این شامل سه شبکه ایستگاه بود که در همان منطقه دریایی با دادههای آموزشی واقع شده بودند ( شکل 1).). هر شبکه مناطق مختلف مجمع الجزایر را نشان می داد و از 15 تا 16 ایستگاه با فواصل مکانی کوچکتر تشکیل شده بود. شبکهها با نمونهگیری تصادفی طبقهای در اطراف برخی از ایستگاههای اصلی سال قبل ساخته شدند. ابتدا شبکهای از 16 مربع (2 کیلومتر در 2 کیلومتر) ایجاد کردیم، تمام زمینها و آبهای کمعمقتر از 10 متر را پوشانده و سپس با نمونهبرداری تصادفی یک ایستگاه در هر شبکه ایجاد کردیم. هر زمان که یک ایستگاه اصلی در میدان وجود داشت، انتخاب می شد و ایستگاه جدیدی ایجاد نمی شد. همه ایستگاهها دو بار بازدید شدند: در اوایل ژوئن (هفته 23) و اوایل آگوست (هفته 31). تعداد کل جفت های Z SD – Z eu 94 عدد بود.
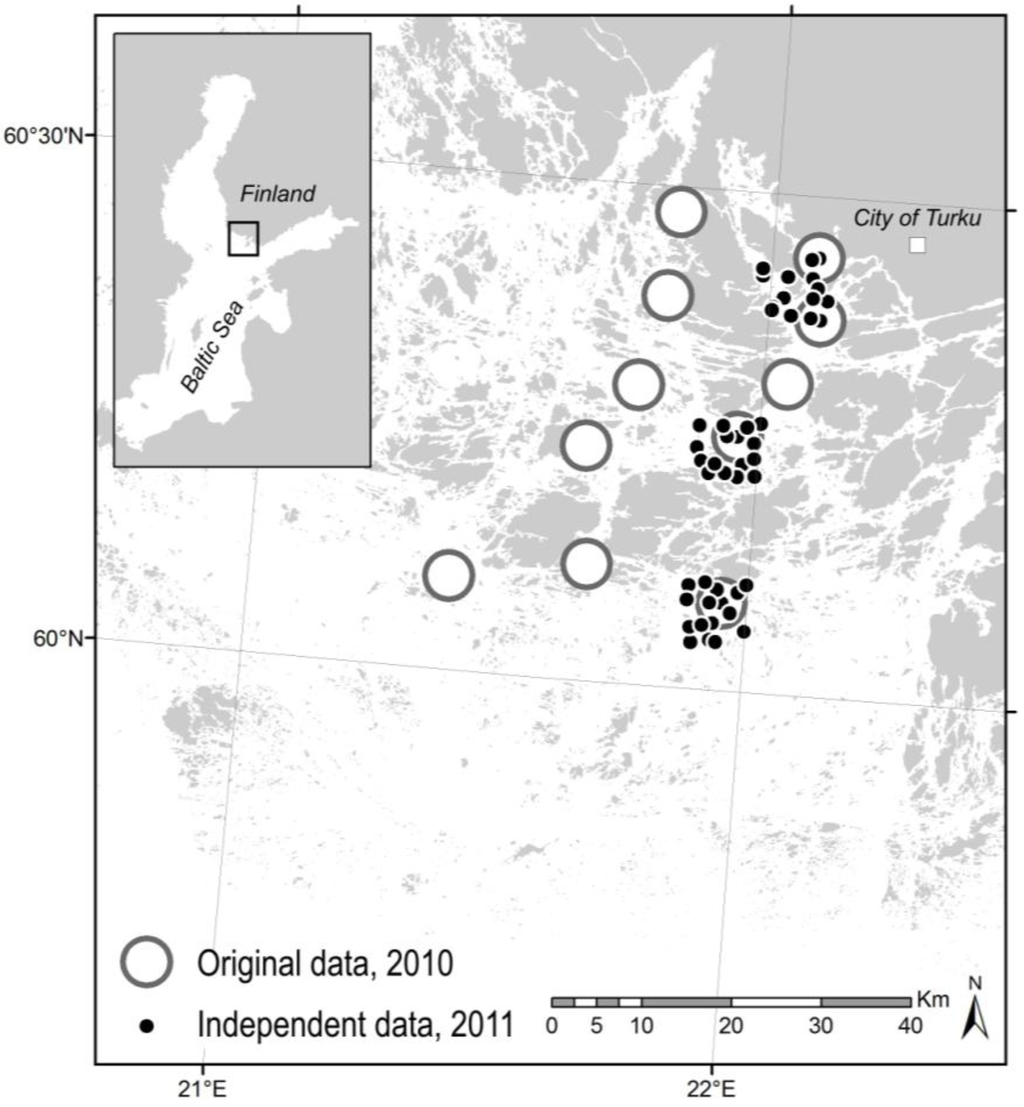
شکل 1. منطقه مورد مطالعه و ایستگاه های نمونه برداری.
2.2. پردازش داده ها
یک ضریب m تجربی برای جفت 88 Z SD – Z eu در مجموعه داده اصلی محاسبه شد. روشهای دستهبندی متفاوتی به کار گرفته شد و یک ضریب برای هر دسته ایجاد شده به عنوان میانگین m محاسبه شد.مقادیر درون گروه مربوطه علاوه بر این، یک تابع خطی و یک تابع توان برازش داده شد. ما به 7 روش تبدیل محلی کالیبره شده برای آزمایش رسیدیم: (1) یک ثابت بر اساس میانگین کل مجموعه داده. (2) 8 ضریب بر اساس هفته های اندازه گیری (روش هفته بعد)؛ (3) 11 ضریب بر اساس ایستگاه های اندازه گیری (روش ایستگاه). (4) 3 ضریب بر اساس مناطق مجمع الجزایر (روش منطقه)؛ (5) 4 ضریب بر اساس مقادیر شفافیت آب (روش چارک)؛ (6) یک تابع خطی. و (7) یک تابع قدرت. سه منطقه مجمع الجزایر با یک تجزیه و تحلیل خوشه سلسله مراتبی، با توجه به ویژگی های نوری همان مجموعه داده اصلی، از پیش تعریف شده بودند (برای تجزیه و تحلیل، [ 12 ] را ببینید). طبقه بندی شفافیت آب با تقسیم Z ایجاد شدمقادیر SD را به چارک تبدیل می کند.
این هفت روش کالیبره شده محلی با 2 روش به دست آمده از ادبیات مقایسه شدند. اولین مورد یک ضریب عمومی 3 است که به عنوان یک عدد صحیح برای استفاده راحت است و بنابراین اغلب در ادبیات پیشنهاد شده و در عمل استفاده می شود. ثانیا، ما یک طبقه بندی شفافیت آب 2 سطحی را که توسط هلمز [ 7 ] معرفی شده بود، آزمایش کردیم. ضریب 3.5 برای آبهای با Z SD کمتر از 5 متر و ضریب 2 برای شفافیت بالاتر (از این پس روش 2 سطحی). یک خط پایه کلی این مطالعه ارزیابی عملکرد هشت روش دیگر در مقایسه با عملکرد ثابت 3 بود.
ابتدا، عملکرد انواع تبدیل برای داده های اصلی ارزیابی شد. مقادیر Z eu مدلسازیشده با مقادیر مشاهدهشده مقایسه شد و سه مقدار نشانگر خطا برای هر روش تبدیل به دست آمد: میانگین خطای مطلق (MAE)، میانگین خطای نسبی (MRE) و خطای ریشه-میانگین مربع نسبی (RRMSE). نمودارهای پراکندگی نشان دهنده مقادیر مدل شده و مشاهده شده برای نشان دادن بیشتر دقت روش های تبدیل ترسیم شدند. ضرایب تعیین برازش (R2 ) به کرت ها اضافه شد.
مرحله دوم ارزیابی دقت مدلسازی روشهای مشابه، به جز روش مبتنی بر ایستگاهها، با یک مجموعه داده مستقل بود. به جای کالیبره کردن مجدد روش ها، مقادیر Z eu با استفاده از ضرایب و توابع تعریف شده با داده های آموزشی در مرحله اول مدل سازی شدند. اگر مقدار مدلسازیشده یک متر یا کمتر از مقدار مشاهدهشده انحراف داشته باشد، نتیجه مدلسازی موفقیتآمیز ارزیابی شد. سپس سهم نسبی موارد موفق، میزان موفقیت کلی روش را نشان می دهد. همین کار با محدودیت دقت 2 متر تکرار شد. نتایج برای مدلهای مبتنی بر ثابت 3، Z SDچارک ها و تابع توان برای نشان دادن پویایی های مکانی-زمانی عملکرد تبدیل نقشه برداری شدند.
3. نتایج
3.1. ساخت و آزمایش مدل با داده های آموزشی اصلی
داده های آموزشی اولیه در مجموع شامل 88 عمق سکوی و پروفایل نور بود. در این مجموعه داده، مقادیر Z SD از 0.8 تا 7.5 متر (میانگین 3.6 متر) و مقادیر Z eu از 2.8 تا 18.0 متر (میانگین 9.6 متر) متغیر بود. دادههای Z SD به توزیع نرمال با مقداری عدم قطعیت نزدیک شدند، زیرا در سطح معنیداری 5 درصد، آزمون KS بر نرمال بودن دلالت داشت ( p -value 0.200)، و آزمون SW نداشت ( p -value 0.012). Z SD _توزیع تا حدودی دارای انحراف مثبت بود (مقدار چولگی 0.375)، که نشان میدهد مقادیر پایین تا حدودی فراوانتر از مقادیر بالا هستند، اما اندازه نمونه به اندازه کافی بزرگ در نظر گرفته شد که به اندازه کافی کل محدوده Z SD را پوشش دهد . مقادیر Z eu به طور معمول بر اساس هر دو آزمون آماری توزیع شدند .
به طور کلی، مقادیر Z eu در انتقال از مجمع الجزایر داخلی به سمت مناطق دریای آزاد بالتیک Proper افزایش یافت. با این حال، ناهنجاری هایی در این الگو وجود داشت، به ویژه برخی از تفاوت های زمانی قابل توجه. مقادیر Z eu عمدتاً از یک الگوی نوسانات فصلی پیروی می کند، اما زمان دقیق مراحل در توسعه فصلی به طور قابل توجهی در مناطق مجمع الجزایر متفاوت است. یعنی قلهها و فرورفتگیهای ایستگاههای نمونهبرداری منطبق نبودند (همچنین به [ 12 ] مراجعه کنید).
همبستگی خطی بین Z SD و Z eu بسیار قوی و مثبت بود (پیرسون 0.941)، و ضریب تعیین بالا بود (R2 = 0.8864). همبستگی بین Z SD اندازه گیری شده و نسبت Z eu به Z SD – یعنی ضریب تجربی m – کمی ضعیف تر اما منفی بود ( شکل 2 ). هر سه نتیجه از نظر آماری معنیدار بودند ( 001/0 p -value <). ضریب تجربی، m، با توجه به شفافیت کلی آب تغییر می کند: هر چه شفافیت آب بیشتر باشد، ضریب بین Z SD و Z eu کمتر است.
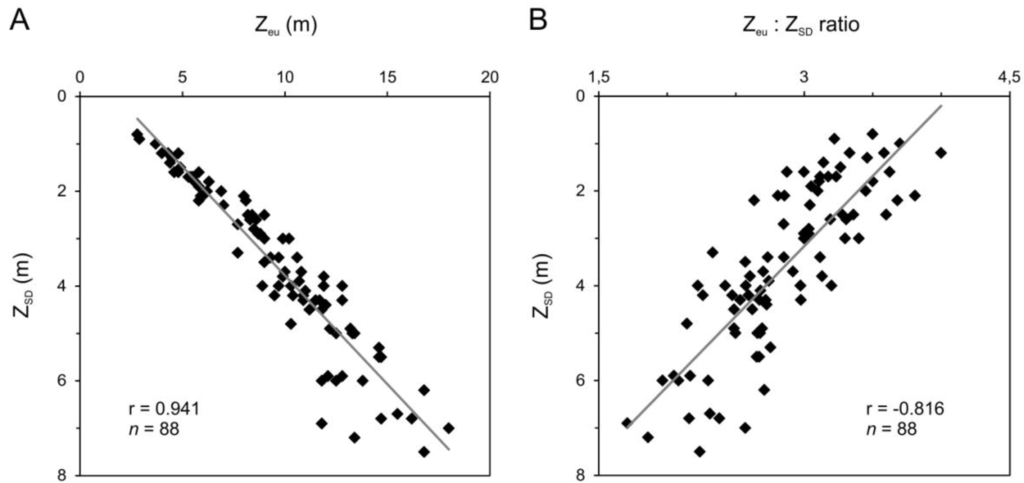
شکل 2. همبستگی (پیرسون) بین ( A ) عمق Secchi ( Z SD ) و عمق euphotic ( Z eu ). و ( ب ) عمق Secchi و نسبت این دو. عمق ها مقادیر اندازه گیری شده از مجموعه داده اصلی هستند.
ابتدا مقادیر Z eu را با ضریب ثابت 3 مدل کردیم که برای آن MAE 1.7 متر و MRE 15.5٪ بود. مقادیر بالای Z eu اغراق آمیز بود، و مقادیر Z eu پایین دست کم گرفته شدند ( شکل 3 A). دامنه خطا از 8.9 متر اغراق تا 1.7 متر کمتر برآورد متغیر بود. در مرحله دوم، ما یک ضریب ثابت بهینه شده برای این مجموعه آموزشی را آزمایش کردیم. میانگین 88 ضرایب در مجموعه 2.85 (میانگین 2.83) بود و با استفاده از میانگین به جای عدد صحیح، MAE از 1.7 متر به 1.4 متر و RRMSE از 20.9٪ به 18.9٪ کاهش یافت ( جدول 1 ).

جدول 1. شاخص های خطا برای مدل های آزمایش شده.
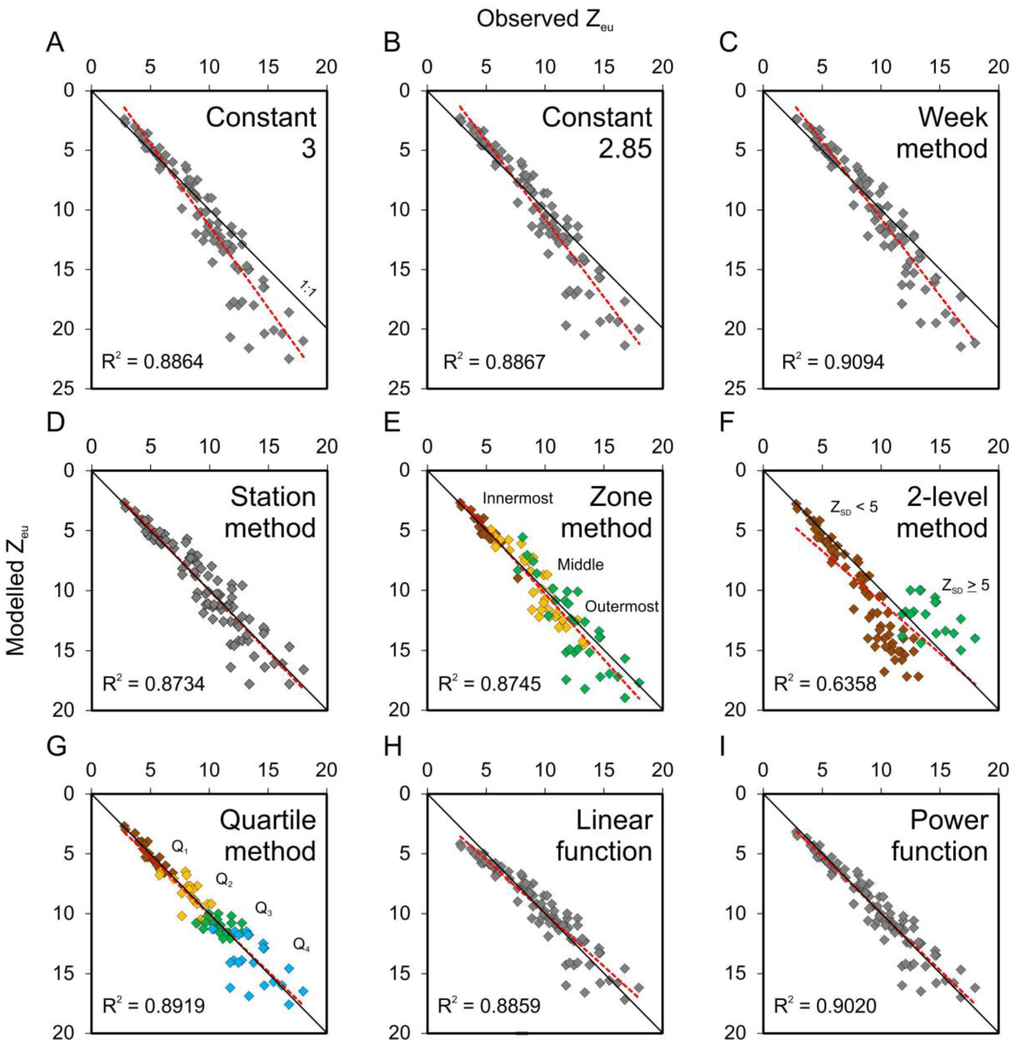
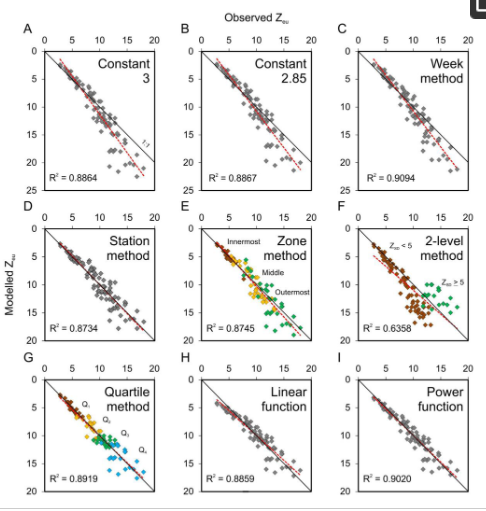
شکل 3. مقادیر Z eu مشاهدهشده در برابر مقادیر پیشبینیشده ترسیم شدهاند که با 9 روش آزمایششده در این مطالعه مدلسازی شدهاند: (A) با ثابت 3. (ب) ثابت متوسط 2.85; (ج) روش هفته؛ (د) روش ایستگاه. (E) روش منطقه; (F) روش 2 سطحی. (ز) روش چارک؛ (H) تابع خطی. و (I) تابع قدرت. خطوط مشکی 1:1 همبستگی کامل را نشان میدهند و خطوط چین دار قرمز خطوط روند مربوط به ضرایب تعیین نشان داده شده در گوشهها هستند. برای هر مورد، n = 88.
ما جفتهای مشاهدهای Z SD – Z eu را به گروههای کوچکتر تقسیم کردیم تا ضرایب را با جزئیات بیشتری مطالعه کنیم. ضرایب m محاسبه شده برای روش ایستگاه از 2.43 تا 3.43 متغیر بود، در حالی که، در مجمع الجزایر داخلی، میانی و بیرونی روش زون به ترتیب میانگین 3.33، 2.87 و 2.48 بود. ضرایب تعریف شده توسط هفته های اندازه گیری از 2.60 (هفته 34) تا 3.05 (هفته 31) متغیر بود. در هر سه مورد، مدل Z euمقادیر کمی دقیق تر از زمانی بود که از یک ضریب ثابت استفاده می شد، اما میانگین خطاها (MAE و MRE) همچنان بیشتر از 1 متر یا 10٪ باقی ماند. روش هفته ضعیفترین عملکرد را داشت و روش ایستگاه فقط تا حدودی بهتر از روش منطقهای بود ( جدول 1 ).
مقایسههای بیشتر را میتوان با نمودارهای پراکنده انجام داد، که مشکلات نسبتاً مشابهی را برای مقادیر Z eu مدلسازی شده با روش هفته نسبت به مقادیر مدلسازی شده با یک ثابت نشان میدهد. مقادیر بالای Z eu بسیار اغراق آمیز هستند ( شکل 3 C). حتی اگر مقدار R2 بالاترین همه آنها است، مقادیر خطا نیز بالا باقی می مانند زیرا روند به وضوح بایاس است. برخی از پیشرفتها در دقت پیشبینی در آبهای شفاف با روش منطقه ( شکل 3 E) و بهبودهای بیشتر با روش ایستگاه ( شکل 3 D) به دست آمد. با این وجود، بیشتر مقادیر بالا همچنان زیر خط 1:1 باقی می مانند.
در مرحله بعد، روش 2 سطحی پیشنهاد شده توسط هلمز [ 7 ] را آزمایش کردیم. دقت تبدیل در واقع هنگام استفاده از دو ضریب (3.5 برای Z SD < 5 متر و 2 برای Z SD ≥ 5 متر) به جای یک کاهش می یابد ( جدول 1 ). نمودار پراکندگی یک برش واضح بین کلاس های شفافیت آب را نشان می دهد، و در نتیجه، R2 در مقایسه با روش های دیگر بسیار پایین تر باقی می ماند ( شکل 3 F ).
طبقه بندی شفافیت آب بر اساس چارک Z SD (روش چارک) با داده های خودمان کالیبره شد و عملکرد بسیار بهتری داشت. ضرایب محاسبه شده برای طبقات 3.32، 3.08، 2.69 و 2.35 بود که از چارک کمترین مقادیر شفافیت آب به سمت آب های شفاف تر شروع می شود ( جدول 2 ). نمودار پراکندگی به طور یکنواخت در اطراف خط 1:1 نسبت به اکثر موارد توزیع شده است، که مقادیر مشاهده شده و مدل شده را نزدیکتر به هم پیوند می دهد ( شکل 3 G). دقت بهبود یافته در نشانگرهای خطا نیز مشهود است ( جدول 1 ). به عنوان مثال، Z eu مشتق شده استمقادیر به طور متوسط 0.9 متر از مقادیر مشاهده شده (MAE) منحرف شده است، که مربوط به MRE کمتر از 10٪ است.
جدول 2. 88 عمق Secchi به چارک تقسیم شد و یک ضریب تجربی m برای هر یک از چارک با محاسبه میانگین نسبت Z eu : Z SD در گروه مربوطه به دست آمد.
مقادیر Z SD مستقل از مکان و زمان اندازهگیری آنها به عنوان مقادیر فردی در نظر گرفته شدند . این بدان معناست که قرائتهای یک ایستگاه خاص همیشه در یک کلاس شفافیت آب طبقهبندی نمیشوند، اما ضریب تبدیل بهینه اغلب در طول هفتههای اندازهگیری در طول فصل رشد تغییر میکند. تنها یک ایستگاه از 11 ایستگاه در همان رده شفافیت آب باقی مانده است و هشت ایستگاه در بین سه دسته از چهار دسته نوسان داشتند. علاوه بر این، در طول شش هفته از هشت هفته اندازهگیری، حداقل یک عدد Z SD در تمام کلاسهای شفافیت آب وجود داشت. فقط در دورههای در دسترس بودن نور کم (هفتههای 17 و 31)، Z SDضریب تبدیل برای شفاف ترین آب ها بدون استفاده رها شد.
در نهایت، یک تابع خطی و یک تابع توان برای اتصال دو پارامتر استخراج شد. قبلی نتیجه داد
Z eu = 1.9322 × Z SD + 2.6629
و دومی به عنوان
Z eu = 3.7489 × Z SD 0.7506
به طور کلی، توابع بهتر از ضرایب ثابت یا مقیاس پذیر استفاده شده در تبدیل انجام می شود. MAE مانند روش چارکی زیر 1 متر باقی ماند. تابع توان کمی بهتر از تابع خطی عمل کرد و در واقع به عنوان بهترین گزینه در مقایسه با تمام روش های آزمایش شده ( جدول 1 ) منتج شد. با این حال، تفاوت بین نتایج توابع و روش چارک نسبتا کم است. نمودارهای پراکندگی تابع توان و تبدیلهای مبتنی بر چارک تقریباً مشابه بودند، اما به نظر میرسید که تابع خطی مقادیر Z eu را در آبهای کدر مبالغه میکند ( شکل 3 ). از نظر آماری، میانگین های مدل سازی شده Z euمقادیر بدون در نظر گرفتن نوع تبدیل، با میانگین مقادیر مشاهده شده در سطح معنی داری 5 درصد تفاوتی نداشتند.
3.2. تست کاربرد با داده های تست مستقل
علاوه بر ارزیابی عملکرد روشهای تبدیل با دادههای آموزشی، ما میخواستیم دقت مدلسازی آنها را با یک مجموعه داده مستقل آزمایش کنیم. نتایج متفاوت بود. در دادههای آزمایشی ما، عملکردها بهترین عملکرد را داشتند زیرا بیش از 70٪ از اعماق افوتیک را در محدوده تعیین شده 1 متر پیشبینی کردند. از آنجایی که هر دو ثابت، همچنین روش منطقه، هفته و 2 سطح به میزان موفقیت کمتر از 40٪ رسیدند، در حالی که روش چارک در بیش از نیمی از موارد موفق بود. با افزایش حد اطمینان به 2 متر، همه میزان موفقیت به بیش از 50٪ افزایش یافت، به جز روش 2 سطح، که ضعیف ترین را انجام داد. برای روش چارک و توابع، تقریبا تمام Z eu مدل شده استبا افزایش نرخ موفقیت بالای 90 درصد، مقادیر در محدوده 2 متری قرار گرفتند ( جدول 3 ).
جدول 3. نتایج آزمون کاربردپذیری با مجموعه داده مستقل سال 2011. سهم نسبی (%) مقادیر Z eu مدل شده که حداکثر 1 متر یا 2 متر از مقادیر Z eu مشاهده شده انحراف دارند ، n = 94.
با این حال، تنوع زمانی و مکانی زیادی در میزان موفقیت وجود داشت. برخی از انواع تبدیل در اوایل تابستان (به عنوان مثال، روش چارک)، و برخی در اواخر تابستان (به عنوان مثال، ثابت ها و توابع) عملکرد بهتری داشتند ( شکل 4 ). عملکرد عوامل ثابت به طور قابل توجهی بین مناطق آزمایش متفاوت بود، در حالی که روش چارک و توابع به نتایج پایدارتری در سراسر مناطق مجمع الجزایر دست یافتند. با این حال، یک روند کلی وجود داشت که در آن نرخ موفقیت تبدیل به سمت سرزمین اصلی در هفته 23 و به سمت مجمع الجزایر بیرونی در هفته 31 افزایش یافت.
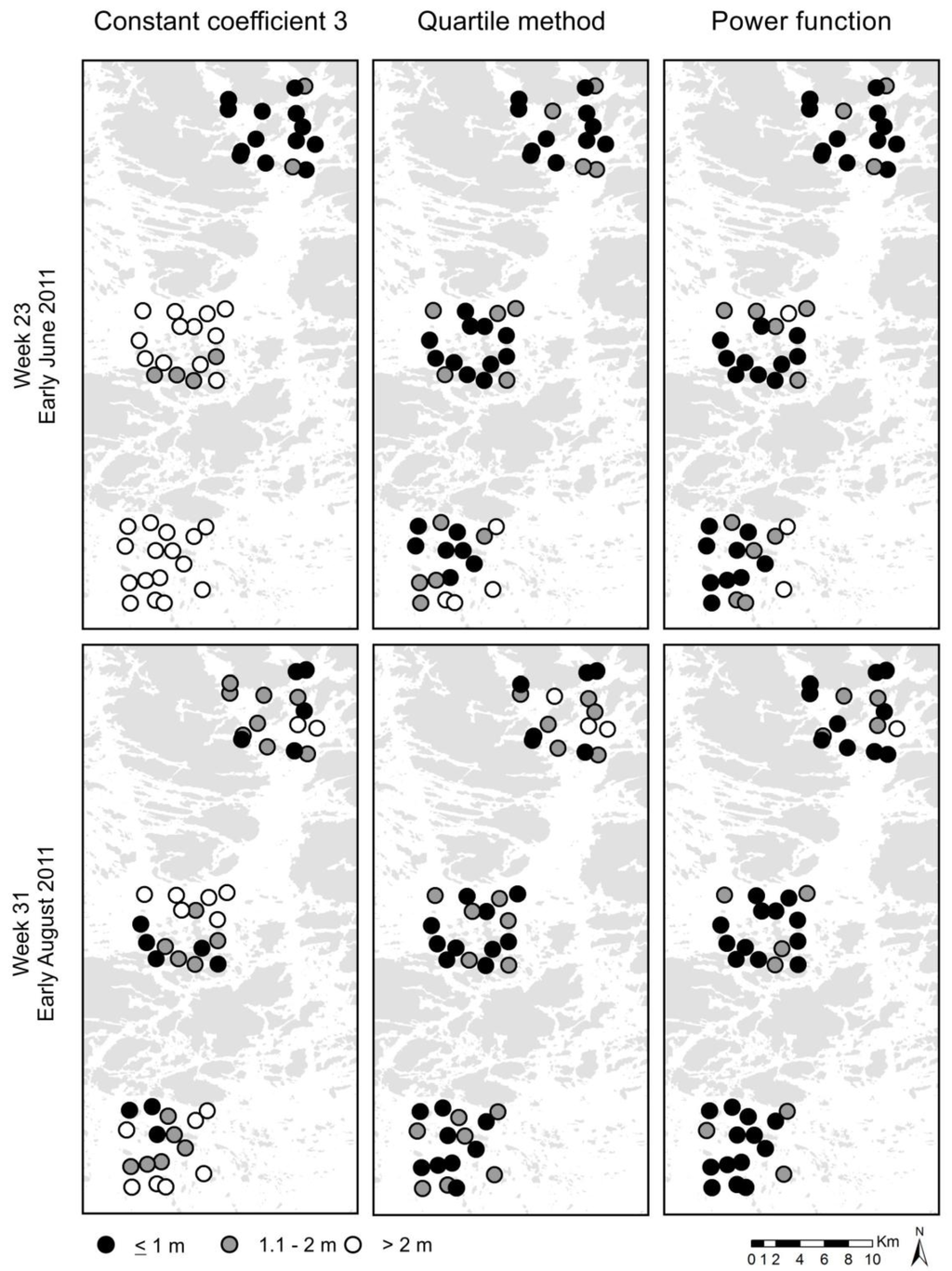
شکل 4. کاربرد دو روش تبدیل به صورت محلی کالیبره شده در این مطالعه با داده های مستقل مورد آزمایش قرار گرفت و عملکرد با ضریب ثابت مشترک 3 مقایسه شد. تفاوت بین مقادیر Z eu مدل شده و مشاهده شده بر روی نقشه ها ترسیم شده است. شکل، تنوع مکانی-زمانی در دقت تبدیل را در بین سه منطقه آزمایشی واقع در بخشهای مختلف منطقه مجمعالجزایر ساحلی که از نظر نوری متغیر است، و بین دو زمان نشاندهنده فازهای مختلف تغییرات فصلی در خواص نوری نشان میدهد.
4. بحث
هدف از این مطالعه مقایسه روش های تعیین ضرایب بین Z SD و Z eu بود. ما معیارهای مختلفی را ارزیابی کردیم تا ضریب را بر اساس آن قرار دهیم، و توانستیم دقت را به طور قابل توجهی بهبود بخشیم – در این مورد، میانگین خطای مطلق دادههای آموزشی اصلی را به نصف کاهش دهیم، و نرخ موفقیت را برای دادههای تست مستقل دو برابر کنیم – با انتخاب مناسبتر. روش تبدیل از یک ضریب ثابت ثابت. بهترین نتایج با روشهای تابعی به دست آمد که در آزمونهای دقت هر دو مجموعه داده به خوبی عمل کردند.
همانطور که در ادبیات پیشنهاد شده است، و توسط داده های ما پشتیبانی می شود، ضریب تبدیل به عنوان تابعی از تغییر شفافیت آب تغییر می کند. توابع تبدیل این انتقال را به عنوان یک پیوستار پردازش میکنند و نیازی به روند گاه مشکلساز طبقهبندی دادهها ندارند. با توجه به نشانگرهای خطا، تابع توان بهترین روش تبدیل در مطالعه ما است – حتی اگر تفاوتهای جزئی در عملکرد در بین دقیقترین روشها وجود داشته باشد. علاوه بر این، نمودار پراکندگی که دقت مدلسازی تابع توان را نشان میدهد، تناسب نسبتاً خوبی از مدل را در کل محدوده داده نشان داد. همین امر برای تابع خطی در Z eu بالا صدق می کندمقادیر، اما در آب کمتر شفاف، مقادیر به طور قابل توجهی اغراق آمیز بود.
گزینه دیگر، علاوه بر استفاده از توابع، استفاده از ضرایب ثابت یا مقیاس پذیر است. با این حال، ممکن است مشکل ساز باشند، مانند همیشه هنگام فشرده سازی داده ها به میانگین ها، برخی از اطلاعات از بین می روند. بنابراین، مقادیر نزدیکتر به میانگین گروه مربوطه از مقادیر نزدیک به حدود کلاس دقیق تر است. تبدیلهای مبتنی بر ضرایب متوسط تمایل به تخمین بیش از حد Z eu مدلسازی شده دارنددر آبهای شفافتر ارزشگذاری میشود و در آبهای شفافتر آنها را دستکم میگیرید. این به وضوح در هنگام استفاده از تنها یک ضریب ثابت دیده میشود، اما این پدیده با ضرایب مقیاسپذیری که دادههای ورودی را به زیرگروهها تقسیم میکنند نیز مرتبط است – علیرغم محدوده دادههای مطلق کلاسها. علاوه بر این، مقادیر محدود کننده همیشه مصنوعی هستند، خواه بر اساس ریاضیات محض ترسیم شوند، یا بر اساس تخمینهای محقق – صرف نظر از اینکه چقدر خوب ثابت شده باشند.
خو و همکاران [ 16 ] در مطالعات خود – جایی که آنها سعی کردند ارتباط بین عمق Secchi و ضریب تضعیف را در خلیج Chesapeake تخمین بزنند – بیان کردند که روابط توده ای که در طول چندین ماه و مناطق بزرگ نصب شده اند احتمالاً شکست می خورند زیرا وابستگی های کنترل کننده نور به طور قابل توجهی در زمان و مکان تغییر می کند. . به همین ترتیب، این برای منطقه مورد مطالعه ما نیز صدق میکند، جایی که خواص نوری آبهای مجمعالجزایر داخلی کمتر شفاف و آبهای مجمعالجزایر بیرونی شفافتر بهطور قابلتوجهی متفاوت است، و تفاوتهای فصلی نیز متمایز هستند [ 12 ، 15 ].
این افراط در کیفیت آب را می توان با تقسیم منطقه از نظر جغرافیایی به مناطق ثابت جدا کرد. یک خط پایه انعطافپذیرتر و کارآمدتر، تقسیم دادهها بر اساس کیفیت آب است. پیش طبقهبندی دادههای اصلی Z SD قبل از روش تبدیل واقعی قبلاً پیشنهاد شده است. تقسیم شفافیت آب 2 سطحی پیشنهاد شده توسط هولمز [ 7 ] در اوایل دهه 70 در این مطالعه آزمایش شد، اما نتایج برای مجموعه داده ما ضعیف بود. ما تفاوت بین دو مقدار ضریب را نسبتاً قابل توجه یافتیم که باعث ایجاد شکاف بزرگ بین مقادیر مدلسازی شده در اطراف مرز دو کلاس میشود. در مطالعه اخیر لیو و همکاران. [ 17] روش طبقهبندی آب NTD675 بهعنوان پایهای برای پیش طبقهبندی استفاده شد تا امکان ارزیابی دقیقتر خواص نوری آب را فراهم کند. با این حال، تعداد کمی از محققین که Z SD را به Z eu تبدیل می کنند، به چنین داده ها یا ابزارهایی دسترسی دارند. این امر راحتی روش پیش طبقهبندی مبتنی بر Z SD ، روش چارکی را نشان میدهد، زیرا پس از فرآیند کالیبراسیون، به جز خود مقادیر Z SD به داده یا ابزار دیگری نیاز نیست.
توابع نیازی به تصمیم گیری در مرحله اجرای رویه تبدیل ندارند و بنابراین استفاده از آنها نسبتاً بدون ابهام است. به همین ترتیب، هنگام استفاده از روش چارک، انتخاب ضریب مناسب با توجه به چارکی که قرائت Z SD مورد نظر به آن تعلق دارد، ساده است. این ویژگی ها برای مثال هنگام نمونه برداری از مناطق انتقالی بین مناطق ساحلی سودمند هستند. به عبارت دیگر، از مشکل انتخاب ضریب پهنه ای مناسب و در نتیجه تشکیل مرزهای خیالی در مناطق دریایی که در واقع با تغییرات تدریجی کیفیت آب مواجه هستند، اجتناب می شود.
علاوه بر این، زمانی که کیفیت آب ثابت نمی ماند، روش تبدیل باید انعطاف پذیر باشد. ممکن است با استفاده از ضرایبی که برای زمانبندی یا مکانها، مانند هفتههای اندازهگیری، ایستگاهها، یا مناطق مجمعالجزایر، ثابت شدهاند، تنوع مکانی-زمانی بالا شناسایی نشود. از سوی دیگر، آنها به روشهای کالیبراسیون محدود یا محلی نیاز دارند، اما در عین حال، در بعد دیگر با مشکل عمده روبرو هستند. در مقابل، روش چارکی از مشکل عمده در هر دو بعد جلوگیری می کند. با انتخاب یک ضریب تبدیل مناسب با توجه به شفافیت آب، انعطاف پذیری بیشتری برای روش مجاز است زیرا مناطق یا زمان بندی های خاصی به طور دائم با ضرایب خاصی ثابت نمی شوند. در واقع، نتایج ما نشان می دهد که این انعطاف پذیری ارزشمند است،چارک Z SD در مناسبت های مختلف در طول فصل رشد استفاده شد.
دقت تمام مدل ها به موفقیت کالیبراسیون آنها بستگی دارد. پوشش داده های کالیبراسیون باید برای این هدف کافی و مناسب باشد. پرایزندوفر [ 3 ] ضرایب تبدیل تعریف شده تجربی را ناامیدکننده یافت زیرا پیوندهای آماری بین Secchi و عمق euphotic ممکن است در زمان حل شود. او استدلال کرد که اگرچه تغییرات کیفیت آب به صورت دورهای است، اما همیشه برخی تصادفیها ناشی از عوامل اقلیمی یا انسانی است که ترکیب نوری آب را تغییر میدهد. به دلیل تنوع تصادفی در کیفیت آب، ضرایب تبدیل از پیش تعریف شده ممکن است پس از تکمیل کالیبراسیون قابل اعتماد نباشند.
در نتیجه، ما استفاده از دادههای جامع مکانی-زمانی را هنگام کالیبره کردن ضرایب توصیه میکنیم. از جمله دادههای تا حد امکان گسترده و متغیر در مرحله کالیبراسیون، ضرایب به احتمال زیاد در موقعیتهای خارج از روش کالیبراسیون نیز عملکرد خوبی دارند. اگر ضرایب بر اساس دادههای جمعآوریشده در یک بازه زمانی باریک، برای مثال در هنگام شکوفایی سیانوباکتریها، و اگر این ضرایب در طول حداکثر شفافیت آب استفاده شوند، پیوند ممکن است غیرقابل اعتماد باشد. در عوض، دادههای ما تنوع در زمان و مکان را پوشش میدهند، و بنابراین تفاوتهای مکانی-زمانی قبلاً در ضرایب گنجانده شدهاند.
با این وجود، تفاوتهای مکانی-زمانی در ارزیابی کیفیت انجام شده با دادههای آزمایش مستقل (از سال 2011) وجود داشت. در هفته اول آزمایش، دقت به سمت سرزمین اصلی و در هفته دوم به سمت دریای آزاد بهبود یافت. یکی از توضیحات احتمالی برای عملکرد ضعیف تر مجمع الجزایر بیرونی در هفته اول، شفافیت بالای آب است. برخی از مقادیر Z SD در سال 2011 به طور قابل توجهی بیشتر از هر Z SD بودمقادیر در سال 2010، و بنابراین خارج از محدوده داده های آموزشی اصلی قرار گرفت. روش چارک احتمالاً به یک کلاس شفافیت آب جدید برای آبهای شفاف تر از مواردی که در طبقه بندی فعلی ما استفاده می شود نیاز دارد. از سوی دیگر، توابع بهتر عمل کردند زیرا به طور دقیق موفق شدند همبستگی Z SD – Z eu را خارج از محدوده داده اصلی برون یابی کنند.
در مطالعه ما، روش مبتنی بر چارکهای شفافیت آب، مقادیر Z eu را در دادههای آموزشی اصلی و در دادههای آزمایش مستقل با دقت متوسطی مدلسازی کرد. فرض بر این است که هر زمان که دادههای کالیبراسیون، یعنی ضرایب محاسبهشده، در همان منطقه دریایی یا حداقل از آبهای مشابه نوری به دست میآیند، با دقت کافی کار میکند – لازم نیست دقیقاً از همان مکانها استفاده شود. با این وجود، مهم است که در نظر بگیریم که چه نوع آب مورد بحث است. ضرایب تعریفشده در آبهای بسیار کدر احتمالاً در آبهای بسیار متفاوت از نظر نوری، مانند آبهای بسیار شفاف، یا آبهایی که در آنها تضعیف شدیداً تحت تأثیر مواد آلی است، به خوبی کار نمیکنند.
از آنجایی که اطلاعات جغرافیایی به طور فزاینده ای در تحقیقات و مدیریت ساحلی مورد نیاز است، همچنین به داده های عمق خوشایند نیز نیاز است. کاربردهای دادههای Z eu فضایی از مطالعات فیتوپلانکتونها و بومشناسی ماکروفیتها تا کار برنامهریزی مربوط به مدیریت یکپارچه منطقه ساحلی (ICZM) و برنامهریزی فضایی دریایی (MSP) را شامل میشود. در هر مورد، بسیار مهم است که با دادههایی کار کنیم که عمق سرخوشی واقعی را تا حد امکان منعکس میکنند. به جای استفاده از یک یا چند مقدار Z SD اندازه گیری شده برای نشان دادن یک منطقه ساحلی خاص، ما اصرار داریم که منطقه را به طور جامع مطالعه کنیم. به عنوان بخشی از این، یک Z SD به Z eu بهینه شده استتبدیل اغلب به طور قابل توجهی نتایج کار GIS ساحلی را بهبود می بخشد.
5. نتیجه گیری ها
ما پیشنهاد میکنیم هنگام تبدیل مشاهدات Secchi به تخمینهایی از عمق سرخوشی، توجه کافی به روششناسی شود – بهویژه در آبهایی که خواص نوری آنها ناشناخته هستند. زمانی که اعماق سرخوشی مشتق از Z SD در مدلهای فضایی اکوسیستمهای دریایی استفاده میشود، انحرافات در تبدیل ممکن است خطاهای مدلسازی قابلتوجهی را منتشر کنند. بالاترین دقت را می توان تنها با استفاده از روش های تبدیل کالیبره شده محلی به دست آورد. در این مطالعه، ما موفق شدیم میانگین خطاهای دقت مدلسازی را با استفاده از توابع تبدیل کالیبره شده محلی یا Z SD مقیاسپذیر به نصف کاهش دهیم.ضرایب تبدیل مبتنی بر چارک به جای یک ضریب ثابت. با این حال، شرایطی وجود دارد که هیچ داده کالیبراسیون در دسترس نیست. اگر یک روش تبدیل بهینهسازی شده در جای دیگری نیاز به اعمال داشته باشد، ضرایب کالیبرهشده در آبهای مشابه تا حد امکان باید انتخاب شوند. علاوه بر این، ما روش هایی را در نظر می گیریم که مبتنی بر شفافیت آب ( Z SD) مقادیر – اعم از توابع پیوسته یا سری از ثابت ها – رویکرد مناسب تری برای روش تبدیل نسبت به استفاده از ضرایب ثابت شده با مکان ها یا دوره های زمانی خاص به عنوان ویژگی های نوری ممکن است به طور قابل توجهی در مکان و زمان متفاوت باشد. صرف نظر از انتخاب روش، عمق سرخوشی یک متغیر بسیار مهم و متغیر فضایی-زمانی محیط ساحلی است. بنابراین، گنجاندن آن در مدلها و سیستمهای پشتیبانی تصمیم هم یک چالش و هم یک کار قابل مدیریت برای مدیریت دادههای مکانی در GIS ساحلی است.
منابع
- کرک، نور JTO و فتوسنتز در اکوسیستم های آبی ، ویرایش سوم. انتشارات دانشگاه کمبریج: کمبریج، بریتانیا، 2011. [ Google Scholar ]
- لی، ز. وایدمن، ا. کیندل، جی. آرنون، آر. Carder، KL; دیویس، سی. عمق منطقه سرخوشی: اشتقاق و دلالت آن در سنجش از دور با رنگ اقیانوس. جی. ژئوفیز. Res. 2007 ، 112 ، C03009:1–C03009:11. [ Google Scholar ]
- پرایزندوفر، علم دیسک RW Secchi: اپتیک بصری آبهای طبیعی. لیمنول. Oceanogr. 1986 ، 31 ، 909-926. [ Google Scholar ] [ CrossRef ]
- Koenings، JP; ادموندسون، دیسک JA Secchi و برآورد نورسنج رژیم های نور در دریاچه های آلاسکا: اثرات رنگ زرد و کدورت. لیمنول. Oceanogr. 1991 ، 36 ، 91-105. [ Google Scholar ] [ CrossRef ]
- سوان، BK; رایفل، KM; تیفانی، MA; Watts، JM; هرلبرت، SH الگوهای مکانی و زمانی شفافیت و تضعیف نور در دریای سالتون، کالیفرنیا، 1997-1999. دریاچه رزرو. مدیریت کنید. 2007 ، 23 ، 653-662. [ Google Scholar ] [ CrossRef ]
- Padial، AA; توماز، SM پیش بینی ضریب تضعیف نور از طریق عمق دیسک Secchi: مدل سازی تجربی در دو اکوسیستم بزرگ نئوتروپیک. Limnology 2008 ، 9 ، 143-151. [ Google Scholar ] [ CrossRef ]
- هولمز، RW دیسک Secchi در آب های کدر ساحلی. لیمنول. Oceanogr. 1970 ، 15 ، 688-694. [ Google Scholar ] [ CrossRef ]
- Aarup، T. شفافیت دریای شمال و دریای بالتیک – مطالعه داده کاوی عمقی Secchi. Oceanologia 2002 ، 44 ، 323-337. [ Google Scholar ]
- Montes-Hugo، MA; آلوارز-بورگو، اس. Giles-Guzmán، محدوده دید افقی AD و عمق Secchi بهعنوان برآوردگر تضعیف PAR زیر آب در یک تالاب ساحلی. مصب 2003 ، 26 ، 1302-1309. [ Google Scholar ] [ CrossRef ]
- تولوانن، اچ. سومینن، تی. Kalliola، R. تغییرات شفافیت آب سالانه و بلندمدت و متعاقب آن دینامیک روشنایی بستر دریا در ساحل مجمع الجزایر دریای بالتیک در جنوب غربی فنلاند. محیط شمالی. Res. 2013 ، 18 ، 446-458. [ Google Scholar ]
- استرامسکا، م. فرای، دی. وابستگی خواص نوری ظاهری به ارتفاع خورشیدی: نتایج تجربی بر اساس دادههای پهلوگیری جمعآوریشده در دریای سارگاسو. جی. ژئوفیز. Res. 1997 ، 102 ، 15679-15691. [ Google Scholar ] [ CrossRef ]
- لوهتالا، اچ. تولوانن، اچ. Kalliola، R. تغییرات مکانی-زمانی سالانه عمق سرخوشی در مجمع الجزایر جنوب غربی-فنلاند، دریای بالتیک. Oceanologia 2013 ، 55 ، 359-373. [ Google Scholar ] [ CrossRef ]
- کراتزر، اس. هاکانسون، بی. Sahlin، C. ارزیابی Secchi و عمق منطقه photic در دریای بالتیک از داده های ماهواره ای. Ambio 2003 , 32 , 577-585. [ Google Scholar ]
- دارکی، م. Stramski، D. ارزیابی الگوریتمهای نوری زیستی MODIS و SeaWiFS در دریای بالتیک. سنسور از راه دور محیط. 2004 ، 89 ، 326-350. [ Google Scholar ] [ CrossRef ]
- سومینن، تی. تولوانن، اچ. Kalliola، R. تداوم جغرافیایی خواص آب لایه سطحی در دریای مجمع الجزایر، جنوب غرب فنلاند. Fennia 2010 ، 188 ، 179-196. [ Google Scholar ]
- خو، جی. هود، RR; چائو، اس.-ای. یک مدل نوری تجربی ساده برای شبیهسازی تغییرپذیری میرایی نور در یک مصب تا حدی مخلوط مصب 2005 ، 28 ، 572-580. [ Google Scholar ] [ CrossRef ]
- لیو، جی. سان، دی. ژانگ، ی. Li, Y. پیش طبقهبندی روابط بین شفافیت آب، تضعیف نور و ذرات معلق در آبهای داخلی کدر را بهبود میبخشد. Hydrobiologia 2013 ، 711 ، 71-86. [ Google Scholar ] [ CrossRef ]
© 2013 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution ( http://creativecommons.org/licenses/by/3.0/ ) توزیع شده است.
بدون نظر