

خلاصه
ناوبری معمولی روی یخ در دریا به صورت دستی توسط دریانوردان آموزش دیده انجام می شود که برای تضمین ایمنی کشتی به شدت بر تجربیات آنها تکیه می شود. علیرغم اطلاعات و داده های یخی که به طور فزاینده ای در دسترس هستند، برای توسعه یک سیستم پشتیبانی ناوبری خودکار روی یخ برای هدایت بهتر کشتی ها در دریا، کار کمی انجام شده است. در این مطالعه، با استفاده از دادههای یخ با فرمت برداری و کدهای ناوبری در مناطق شمالی، عدد یخ را محاسبه کرده و منطقه دریا را به دو بخش تقسیم میکنیم: منطقه قابل کشتیرانی پیوسته و همتای منطقه غیرقابل کشتیرانی مجزای متعدد. ما نمودارهای Voronoi را برای مناطق دارای موانع تولید می کنیم و یک نمودار شبکه مانند جاده برای اتصالات در دریا می سازیم. بر اساس چنین شبکه ای، ما یک بسته سیستم اطلاعات جغرافیایی (GIS) را طراحی و توسعه می دهیم تا به طور خودکار ایمن ترین و کوتاه ترین مسیرها را برای انواع مختلف کشتی ها بین جفت مبدا و مقصد (OD) محاسبه کند. یک ابزار دید،Isovist ، همچنین برای کمک به شناسایی خودکار مناطق قابل کشتیرانی ایمن در شرایط اضطراری پیاده سازی شده است. بسته GIS توسعهیافته بهصورت آنلاین بهعنوان یک پروژه منبع باز به نام NavSpace به اشتراک گذاشته میشود که برای اعتبارسنجی و گسترش، به عنوان مثال، سرویس ناوبری داخلی در دسترس است. این کار توسعه سیستم پشتیبانی ناوبری روی یخ را ترویج می کند و به طور بالقوه ایمنی ناوبری یخ در دریای قطب شمال را افزایش می دهد.
کلید واژه ها:
یخ دریا ؛ قطب شمال ؛ ناوبری ; GIS ; ایزویست
چکیده گرافیکی
1. معرفی
پیمایش در دریا با روشی که ما در خشکی از طریق شبکه های جاده ای جهت یابی می کنیم کاملاً متفاوت است. یک شبکه جاده شامل اتصالات ثابت قابل پیادهروی یا رانندگی برای پیمایش با کمک سیستم ناوبری و خدمات است. برعکس، یک منطقه دریایی قابل کشتیرانی به دلیل تغییرات پوشش یخ دریا در طول زمان پیوسته و همیشه در حال تغییر است. در نتیجه، ناوبری در یخ نیاز به صبر زیادی دارد. به طور متعارف، ناوبری در دریا نیاز به دریانوردان یخی آموزش دیده برای برنامه ریزی و مدیریت مسیرهای کشتی بین مبدا و مقصد (OD) در چنین مناطقی دارد که شرایط کشتیرانی دائماً در حال تغییر است [1]، که به شدت به تجربیات آنها برای تضمین ایمنی کشتی تکیه می شود . با توجه به حمل و نقل کانادا (1998) [ 2]، در حالی که یک کشتی قطبی در دریا حرکت می کند، حداقل یک ناوگر یخ باتجربه باید سوار باشد. دریانوردان عوامل بسیاری را در نظر می گیرند (به عنوان مثال، وضعیت یخ و حرکت کشتی) و گاهی اوقات نیاز به تغییر مسیر و سرعت کشتی در شرایط غیرمنتظره دارند [ 3 ]. با این حال، انتظار نمی رود که مهارت های لازم دریانوردان یخ به طور کامل ایمنی کشتی ها را در آن منطقه تضمین کند. طبق آمار [ 4]، حوادث کشتیرانی در دهه های گذشته رخ داده است. علیرغم پیشرفتهای فناوری اطلاعات و ارتباطات (ICT) برای تسهیل ناوبری، ناوبری یخ معمولی بهویژه برای برنامهریزی مسیر کشتی بهنوعی به صورت دستی عمل میکند. برای ارائه ناوبری ایمن تر در یخ و هدایت بهتر کشتی ها در دریا، یک سیستم پشتیبانی خودکار ناوبری یخ مطلوب است. واضح است که اطلاعات یخ دریا نقش کلیدی در طراحی و توسعه چنین سیستمی دارد.
محققان و پزشکان مدتهاست که به ارتباط مستقیم بین مدلهای پایگاه داده یخ مکانی-زمانی و سیستمها و خدمات اطلاعات یخ پی بردهاند. مطالعات مربوط به یخ در دهههای گذشته به سه گروه تقسیم میشوند: گروه اول طراحی مدلهای پایگاه داده مکانی-زمانی برای ذخیره و دستکاری دادههای یخ دریا در مقیاس بزرگ برای مطالعات مرتبط است [5 ، 6 ، 7 ، 8 ، 9 ] . دومی بر استفاده از GIS و ابزارهای وب برای ارائه خدمات اطلاعات یخی مانند تجسم آنلاین و دسترسی به داده ها به کاربران نهایی تمرکز دارد (به عنوان مثال، [ 10 , 11 , 12 , 13]). در همین حال، تعدادی از سازمانهای دولتی و مراکز تحقیقاتی نیز خدمات آنلاین یخ دریا و سرویسهای وب قابل تعامل را ارائه میدهند (به عنوان مثال، [ 14 ، 15 ، 16 ، 17 ، 18 ، 19 ]). سوم به مسائل زیست محیطی مرتبط با یخ دریا مانند شناسایی الگوهای یخ دریا اختصاص دارد (به عنوان مثال، [ 20 ، 21 ، 22 ]).
علیرغم مطالعات متعدد در مدل های پایگاه داده یخ و سیستم اطلاعات یخ، سیاست گذاران و ناوبران یخ ابزاری برای تجسم کافی مناطق دریایی قابل کشتیرانی و کمک به ناوبری خودکار کشتی ها در زمان واقعی ندارند، حتی اگر چنین داده های یخی در دسترس باشد. مطالعات معدودی که ناوبری یخ دریا را در نظر می گیرند (به عنوان مثال، [ 3 ، 23 ، 24 ]) به ارزیابی و تجسم شرایط و تغییرات یخ محدود می شوند، نه یک سیستم پشتیبانی ناوبری یخ عملی و خودکار. برخی از ابزارهای نرم افزار ناوبری دریایی موجود (به عنوان مثال، [ 25 ]) تنها بر روی تجسم GIS با پوشش چندین لایه اطلاعاتی مانند بستر دریا، جزر و مد و مکان کشتی تمرکز می کنند.
این مطالعه با پیشنهاد یک روش جدید GIS که هدف آن توسعه یک سیستم پشتیبانی خودکار ناوبری یخ است، این شکاف تحقیقاتی را پر می کند. ما یک نمودار جادهای مجازی در دریا پیشنهاد میکنیم که بر اساس ترسیم مناطق دریایی قابل کشتیرانی و رژیمها یا موانع دریایی غیرقابل کشتیرانی ساخته شده است. ما الگوریتم کوتاهترین مسیر Dijkstra را اعمال می کنیم و روش Isovist تحلیلی بصری را اتخاذ می کنیم و سپس یک بسته تحلیلی GIS یکپارچه ایجاد می کنیم که آن را NavSpace می نامیم . NavSpace یک پروژه GIS منبع باز است که برای توسعه و اعتبارسنجی در مطالعات مربوط به یخ در دسترس است. با استفاده از NavSpaceبه دادههای یخ با فرمت برداری GIS از سرویس یخ کانادا، نشان میدهیم که چگونه سیستم پشتیبانی ناوبری یخ مبتنی بر GIS به ما اجازه میدهد: (1) به برنامهریزی خودکار مسیر کشتی کمک کنیم. (2) به طور خودکار مناطق دریایی قابل کشتیرانی را در صورت وقوع شرایط اضطراری شناسایی کند. و (3) نقشه تعاملی به منظور خدمات ناوبری بصری و تحلیلی بالاتر. در نتیجه، یک سیستم پشتیبانی خودکار ناوبری یخ ممکن است در زمان واقعی در سطح عملیاتی به دست آید.
مطالعه به شرح زیر سازماندهی شده است. بخش 2 روششناسی مبتنی بر GIS پیشنهادی ما را ارائه میکند، از جمله ترسیم مناطق دریایی قابل کشتیرانی و تولید نمودارهای Voronoi برای رژیمهای یخی غیرقابل کشتیرانی، و به دنبال آن شرح الگوریتم مسیریابی کشتی و روش تجسم Isovist . بخش 3 برخی از نتایج پیاده سازی را با استفاده از نمودارهای دیجیتال یخ دریا از سرویس یخ کانادا ارائه می کند. بخش 4 برخی از نکات پایانی را ارائه می دهد.
2. روش شناسی
هدف اصلی این مطالعه توسعه ابزارهای مبتنی بر GIS تحلیلی یکپارچه برای پشتیبانی از برنامهریزی مسیر کشتی، تجسم و خدمات ناوبری است، به طوری که پتانسیل بهبود ایمنی ناوبری یخ دریا ممکن است به دست آید. این بخش با استفاده از داده های مصنوعی به منظور راحتی، روش پیشنهادی مبتنی بر GIS را به تفصیل نشان می دهد.
2.1. یک راه حل دو مرحله ای مبتنی بر GIS
یک راه حل دو مرحله ای مبتنی بر GIS برای این مشکل پیشنهاد شده است ( شکل 1 ). اول، تقسیم نواحی دریایی قابل کشتیرانی و مناطق دریایی غیرقابل کشتیرانی بر اساس محاسبه عدد یخ (IN) داده های دیجیتال یخ دریا با فرمت برداری بردار ساده است. IN به عنوان یک شاخص برای ایمن بودن یا نبودن یک نوع کشتی به یک منطقه یخی دریا عمل می کند، به این معنی که ما می توانیم مناطق دریایی را به دو قسمت تقسیم کنیم: مناطق دریایی قابل کشتیرانی و مناطق دریایی غیرقابل کشتیرانی. محاسبه IN به تفصیل در بخش 2.2 مورد بحث قرار خواهد گرفت. دوم، تولید اسکلت برای مناطق دریایی قابل کشتیرانی فرآیندی است که یک فضای باز پیوسته را به خطوط یا بخشهای منفرد گسسته میکند. از خطوط اسکلت می توان برای ایجاد یک نمودار شبکه مانند جاده استفاده کرد که بر اساس آن می توانیم هر الگوریتم برنامه ریزی مسیر را برای کمک به ناوبری در دریا اعمال کنیم. تولید نمودارهای Voronoi برای مسیریابی کشتی در بخش 2.3 مورد بحث قرار خواهد گرفت . ما این راه حل دو مرحله ای مبتنی بر GIS را به عنوان یک بسته GIS پیاده سازی می کنیم و ثابت می کنیم که مسیرهای کشتی تولید شده نه تنها با مسیرهای توصیه شده مطابقت دارند، بلکه کوتاه ترین و ایمن ترین مسیرها نیز هستند. مزیت اصلی این روش این است که چنین روش ساده و ظریف مسیریابی کشتی می تواند امن ترین گزینه را ارائه دهد.
2.2. تعیین منطقه دریایی قابل کشتیرانی
مناطق دریایی را می توان به دو بخش تقسیم کرد: مناطق دریایی قابل کشتیرانی و مناطق دریایی غیرقابل کشتیرانی، از دیدگاه ناوبری. در حالی که هر دو نوع منطقه به دلیل تغییر در پوشش یخ در طول زمان دائماً در حال تغییر هستند، بخش اول پیوسته و قسمت دوم از قطعات جدا شده متعدد تشکیل شده است. برای تعیین اینکه آیا ورود به یک رژیم یخ ایمن است یا خیر، [ 2 ] روش Ice Numeral (IN) را به عنوان شاخص معرفی کرد و [ 23 ] یک روش GIS برای محاسبه IN پیشنهاد کرد. ما از همین روش برای تعیین مناطق دریایی قابل کشتیرانی از رژیم های یخی پیروی می کنیم. به منظور راحتی، ما به سادگی روش [ 2 ، 23 ] را با استفاده از داده های مصنوعی معرفی می کنیم. برای جزئیات بیشتر به دو مقاله فوق مراجعه فرمایید.
یخ دریا را می توان بر اساس مرحله توسعه و غلظت آن طبقه بندی کرد. غلظت عبارت است از “نسبت بیان شده در دهم که مساحت سطح آب پوشیده از یخ را به عنوان کسری از کل منطقه توصیف می کند” [ 26 ]. یک رژیم یخی (چند ضلعی های رنگی در شکل 2 الف) می تواند از مخلوطی از انواع یخ با غلظت ها و ضخامت های مختلف [ 23 ] تشکیل شده باشد و می تواند به صورت دیجیتالی به عنوان کد تخم مرغ ( شکل 2 ب) با «غلظت، مراحل رشد (سن)» نمایش داده شود. و (اندازه شناور) از یخ» به شکل ساده بیضی شکل [ 26 ].
عدد یخ (IN) توسط [ 2 ] برای اندازه گیری توانایی یک نوع کشتی برای حرکت در این رژیم یخی طراحی شد . IN را می توان با استفاده از رابطه (1) محاسبه کرد:
IN = (C a * IM a ) +(C b * IM b ) + … + (C n * IM n )
که در آن Ca غلظت بر حسب دهم یخ نوع a است و IMa ضرب کننده یخ (IM) برای یخ نوع a است و بقیه را می توان به همین ترتیب انجام داد. IMها برای نشان دادن وزنی که می توان به یک نوع یخ برای یک نوع کشتی داد استفاده می شود ( جدول 1 را ببینید ).
اگر عدد یخ محاسبه شده برای یک نوع کشتی صفر یا مثبت باشد، کشتی می تواند از طریق آن رژیم یخی حرکت کند. برعکس، اگر عدد یخ منفی باشد، این نوع کشتی نمی تواند در آن رژیم یخی حرکت کند، مگر اینکه یک طرح جایگزین مانند استفاده از یخ شکن برای کمک به کشتی اتخاذ شود. برای مثال، فرض کنید که یک رژیم یخی شامل 8/10 غلظت کل یخ است که 1/10 آن یخ قدیمی و 7/10 یخ ضخیم سال اول است. در حین انجام محاسبات، به یاد داشته باشید که 2/10 آب آزاد را وارد کنید [ 27 ]:
کشتی نوع A: (1 × −4) + (7 × −1) + (2 × 2) = −7 (رژیم منفی)
کشتی CAC 4: (1 × −3) + (7 × +1) + (2 × 2) = +8 (رژیم مثبت)
IN های محاسبه شده منعکس کننده چگونگی نوسان آنها برای یخ یکسان با کشتی های ساختاری متفاوت است. در مثال بالا، کشتی نوع A نمی تواند از طریق رژیم یخی حرکت کند، در حالی که کشتی نوع CAC4 می تواند با خیال راحت از آن عبور کند. به این ترتیب، ما میتوانیم مناطق دریایی قابل کشتیرانی را برای انواع مختلف کشتیها با استفاده از نمودارهای یخی دیجیتال با فرمت برداری GIS ترسیم کنیم.
2.3. ایجاد نمودارهای ورونوی برای برنامه ریزی مسیر کشتی
دریانوردان یخ هنگام حرکت در دریا باید بدانند که کجا، چه نوع و چه مقدار رژیم یخی در اطراف آنها وجود دارد. از نظر تئوری، کشتی ها می توانند در هر مکانی در رژیم های مثبت حرکت کنند. با این حال، برای انتخاب ایمن ترین مسیر کشتی، بهترین استراتژی این است که آنها را تا حد امکان از رژیم های منفی با تمرکز بالا دور نگه دارید [ 27 ]. در شکل 3 ، 14 مانع مصنوعی به رنگ سیاه وجود دارد که مناطق دریایی غیرقابل تردد هستند و حداقل مستطیل مرزی برای توصیف مرزهای آنها استفاده شده است. ما نمودارهای Voronoi را برای این 14 مانع ایجاد می کنیم که مناطق رنگی در شکل 3 هستند.آ. بر اساس تعریف ریاضی نمودار ورونوی، فاصله بین هر نقطه در نمودار ورونوی و موانع کمتر از فاصله بین نقطه و هر مانع دیگر است. در نتیجه، مرز (خطوط آبی در شکل 3 ب)، که ما آن را اسکلت می نامیم، یک نمودار ورونوی نیمساز فضای بین هر دو مانع است، و هر نقطه از مرز دارای بیشترین فاصله تا نزدیکترین موانع است. همزمان. به همین دلیل، اسکلت ها به طور کامل با ایمن ترین اصل ناوبری در دریا مطابقت دارند.
تا اینجا توضیح دادهایم که چرا حرکت در امتداد اسکلتهای رژیمهای منفی در دریا بیخطر است. 39 اسکلت و 26 اتصال (خطوط آبی و نقاط قرمز در شکل 4 الف) وجود دارد که برای 14 مانع غیرقابل تردد به صورت مستطیل های سیاه در شکل 3 نشان داده شده است . این اسکلت ها و اتصالات نوعی گراف شبکه راه هستند و شکل 4 ب نمودار دوگانه است که نقاط آبی به معنای خطوط اسکلت هستند در حالی که خطوط قرمز به معنای اتصالات بین آنهاست. بر اساس چنین نموداری، میتوانیم هر الگوریتم برنامهریزی مسیر را برای محاسبه خودکار مسیرهای کشتی بین هر جفت مبدا و مقصد در دریا اعمال کنیم .
2.4. Isovist برای شناسایی مناطق امن قابل کشتیرانی
ایزویست یک ناحیه دید از یک دیدگاه واحد در یک فضای باز است. مفهوم ایزویست وارد شده و برای تحلیل فضایی مفید است [ 28 ]. در مناطق دریایی قابل کشتیرانی، یک ایزویست مناطق امن قابل کشتیرانی را از دیدگاه فعلی نشان می دهد. ادغام Isovist در سرویس ناوبری یخ به طور بالقوه می تواند به ناوبر کمک کند تا با توجه به در دسترس بودن داده، چنین مناطق قابل کشتیرانی ایمن را در زمان واقعی شناسایی کند. شکل 5 نمونه ای از ایزویست بر اساس داده های مصنوعی شرح داده شده در بخش 2.2 است .
3. نتایج و بحث
در این بخش، روشها و الگوریتمهای توضیحدادهشده در بخش 2 را بهعنوان یک بسته GIS، یعنی NavSpace ، رسمی و پیادهسازی میکنیم که بهعنوان یک پروژه منبع باز بهصورت آنلاین برای اعتبارسنجی و گسترش به اشتراک گذاشته شده است، و امیدواریم بتوانیم مشارکتهای بیشتری را از جوامع مرتبط جلب کنیم. یک مطالعه موردی بیشتر با استفاده از NavSpace در نمودارهای دیجیتال یخ دریا با فرمت برداری بردار تولید شده توسط Canadian Ice Service انجام می شود . برای جزئیات بیشتر از داده های یخ دریا، لطفاً به وب سایت رسمی آن مراجعه کنید [ 6 ].
3.1. پیاده سازی و آزمایش در دریای قطب شمال
ما برای کمک به برنامه ریزی مسیر کشتی در دریای قطب شمال، یک پسوند ArcGIS موسسه تحقیقاتی سیستم های محیطی (ESRI) منبع باز، به نام NavSpace ، طراحی و توسعه می دهیم . محیط توسعه Microsoft Visual Studio 2010 (VS2010) ASP.net با استفاده از زبان برنامه نویسی C# است که ابزار توسعه شی گرا و کاربرپسند برای پلتفرم ویندوز است. ما ArcObjects ارائه شده توسط ESRI ArcGIS را برای پیاده سازی توابع تجسم و تحلیل فضایی انتخاب می کنیم. مزیت ESRI ArcObjects در توانایی آن برای ارائه رابط های تجسم و تجزیه و تحلیل فضایی است که می تواند در NavSpace ادغام شود .، که تعهد زمانی در توسعه را بسیار کاهش می دهد. علاوه بر این، هم Microsoft و هم ESRI ArcGIS بستههای نرمافزاری اصلی هستند که تداوم خوبی را از نظر بهروزرسانی نسخه و قابلیت نگهداری در طول چرخه عمر پروژه نرمافزاری ارائه میکنند.
دریای قطب شمال به عنوان منطقه مورد مطالعه ما انتخاب شده است ( شکل 6 را ببینید ) به دو دلیل اصلی: (1) در دسترس بودن نمودارهای دیجیتال یخ دریا در این منطقه. و (2) یک پروژه یخ دریا برای آرشیو خدمات یخ کانادا، یعنی CanICE ، پایگاه داده اطلاعات یخ دریا و پورتال مبتنی بر وب را با ابزارهای جدید و تعاملی کشف دانش [ 11 ] در این زمینه توسعه داده است . به ویژه، یک سری از رابط های برنامه نویسی برنامه کاربردی وب یخ دریا (APIs) مانند Google Maps برای جاوا اسکریپت توسعه داده شده است و یک sandbox وب آنلاین برای تسهیل اشکال زدایی و به اشتراک گذاری انواع دیگر خدمات وب یخ ارائه شده است [12 ]]. اگرچه پیاده سازی و استقرار سرویس ناوبری یخ دریا برای اهداف عمومی در هر منطقه یخی دریا هدف گذاری شده است، با کمک پلت فرم باز CanICE، آزمایش ، ادغام و محبوبیت بیشتر سرویس ناوبری یخ به عنوان بخشی از CanICE آسان تر خواهد بود. پروژه
3.2. تولید “گراف شبه شبکه جاده” در دریای قطب شمال
دریای قطب شمال به پنج منطقه مورد علاقه تقسیم شده است (قسمت بالایی را در شکل 6 ببینید)، و ما بر روی مناطق قطب شمال غربی و شرق قطب شمال تمرکز می کنیم زیرا جزایر زیادی وجود دارند که پیچیدگی ناوبری یخی دریا را افزایش می دهند. در قسمت پایینی شکل 6 ، یخ دریا (رنگی بر اساس مراحل توسعه آن) همراه با این جزایر، برنامه ریزی دستی مسیر برای انواع مختلف کشتی ها را دشوار می کند.
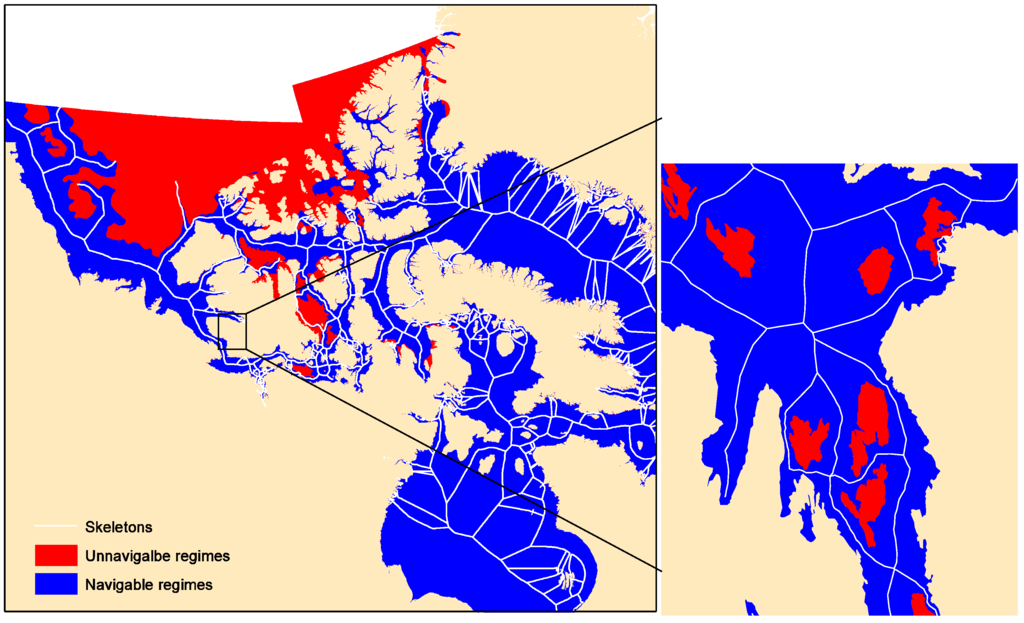
ما نمودارهای دیجیتال یخ دریا را در 2 فوریه 2015 دانلود کرده و آن را به فرمت فایل شکل با پشتیبانی از ArcGIS تبدیل می کنیم (سیستم مختصات PS100 است) تا مطالعه موردی را در دریای قطب شمال انجام دهیم. با استفاده از راه حل دو مرحله ای ( شکل 1 را ببینید ) و با استفاده از بسته GIS توسعه یافته NavSpace ، ابتدا عدد یخ (INs) را برای کشتی نوع CAC3 محاسبه می کنیم (به جدول 1 در بخش 2.1 مراجعه کنید ). نتایج در شکل 7 نشان داده شده است ، که در آن رنگ قرمز رژیم های یخی غیرقابل کشتیرانی است ( به عنوان مثال ، با مقادیر IN منفی) در حالی که رنگ آبی رژیم های یخی قابل کشتیرانی است ( یعنی، با مقادیر IN مثبت). بدیهی است که گاهی اوقات جزایر از نظر جغرافیایی با رژیمهای غیرقابل کشتیرانی مرتبط میشوند که از نظر فضایی با هم ادغام میشوند تا هنگام تولید نمودارهای ورونوی موانعی را بهدست آورند. خطوط سفید در شکل 7 خطوط اسکلت تولید شده هستند که برای ساختن “گراف شبکه راه مانند” در دریا برای برنامه ریزی خودکار مسیر کشتی استفاده می شود. در سمت راست نمای دقیق یک منطقه مورد علاقه در مستطیل سیاه در سمت چپ است.
با توجه به روشی که در بخش 2.2 توضیح داده شده است، میتوانیم یک «گراف شبکهای جادهای» بر اساس اسکلتهای تولید شده بسازیم (خطوط سفید در شکل 7 ). سپس میتوانیم هر الگوریتم کوتاهترین مسیر را برای محاسبه کوتاهترین و ایمنترین مسیرها برای ناوبری کشتی اعمال کنیم. این بدان معنی است که مسیر کشتی در امتداد اسکلت ها حرکت می کند. ممکن است یک سوال در اینجا مطرح شود: آیا مسیرهای دریایی واقعی وجود دارد که از روش اسکلت نیز پیروی کند؟ در شکل 8مسیر دریایی شمال غربی پاساژ که اقیانوس اطلس و اقیانوس آرام را از طریق اقیانوس منجمد شمالی به هم متصل می کند به عنوان خطوط قرمز نشان داده شده است. اگرچه گذرگاه شمال غربی بدون در نظر گرفتن تغییرات یخ دریا در طول زمان به عنوان مسیر توصیه شده برای همه انواع کشتی ها خدمت کرده است، اما از نظر بصری می توان دید که از اصل ناوبری یخ دریا پیروی می کند: تا حد امکان از رژیم های غیرقابل کشتیرانی دور باشید. به همین دلیل، گذر شمال غربی با روش پیشنهادی در این مطالعه مطابقت دارد. مهمتر از آن، روش پیشنهادی دارای مزایایی در مقابله با تغییرات یخ دریا در طول زمان با پشتیبانی از تکنیکهای GIS است.
3.3. برنامه ریزی خودکار مسیر کشتی
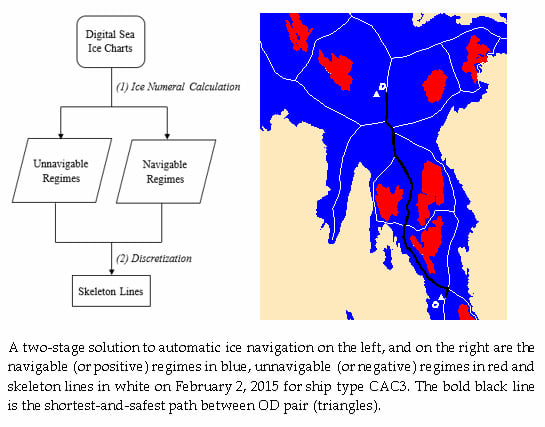
یک جفت مبدا و مقصد O و D (دو مثلث سفید در شکل 9 ) به ترتیب در ناحیه محلی مورد نظر تنظیم شده است. با استفاده از الگوریتم کوتاهترین مسیر Dijkstra که در NavSpace ادغام شده است به “گراف شبه شبکه جاده” در دریا، می توانیم کوتاه ترین و در عین حال ایمن ترین مسیر (که به عنوان خط سیاه پررنگ در شکل 9 الف نشان داده شده است) را بدست آوریم که طول کل آن است. 84.4 کیلومتر است. همانطور که قبلاً ذکر شد، کوتاهترین مسیر نیز امنترین است، زیرا چنین مسیری از امنترین مقررات ناوبری نیز پیروی میکند، یعنی تا حد امکان از رژیمهای غیرقابل کشتیرانی در هنگام حرکت در دریا دور بماند.
به طور قابل توجهی، طبق [ 27 ]، همچنین مهم است که کشتی ها باید تا حد امکان در امتداد خطوط ساحلی در دریا حرکت کنند. برای حل این مشکل، یک الگوریتم وزنی کوتاه ترین مسیر در NavSpace توسعه داده شده است . در الگوریتم وزنی کوتاه ترین مسیر، به جای استفاده از طول هندسی هر اسکلت، از وزن هر خط اسکلت برای محاسبه کوتاه ترین مسیر استفاده می کنیم. وزن به روش زیر محاسبه میشود: ما به سادگی نزدیکترین فاصله بین هر بخش خط اسکلت و خط ساحلی را محاسبه میکنیم، و وزن هر خط اسکلت دقیقاً در نسبت معکوس با فاصله نرمالشده است. به این معنی که هرچه خط اسکلت به خطوط ساحلی نزدیکتر باشد، وزن قطعه خط اسکلت بیشتر است و بالعکس.. پس از آن، زمانی که کوتاه ترین مسیر را بین جفت های OD محاسبه می کنیم، وزن هر مسیر ممکن را نیز به دست می آوریم. برای رعایت دو مقررات ایمنی ناوبری فوق، میتوان مسیری را انتخاب کرد که بیشترین وزن را داشته باشد و طول آن به کوتاهترین مسیر نیز نزدیک باشد. این نوعی تعادل بین مسافت سفر و ایمنی است. به عنوان مثال، در سمت راست شکل 9 ب، طول مسیر (خط پررنگ سیاه) بین جفت OD 93.5 کیلومتر است. کمی طولانی تر از شکل 9 الف است، اما وزن بالاتری دارد، به این معنی که بهترین تناسب را با دو قانون ناوبری دارد: نزدیک به خطوط هزینه و داشتن وزن بیشتر.
3.4. Isovist: شناسایی خودکار مناطق قابل کشتیرانی
در بخش 3.2 و بخش 3.3 ، ما نشان دادیم که چگونه میتوان یک “گراف شبه شبکه جاده” در دریا ساخت و در نهایت کوتاهترین مسیر و الگوریتمهای وزنی کوتاهترین مسیر را در نمودار اعمال کرد تا کوتاهترین و ایمنترین مسیر را محاسبه کنیم. با این حال، در برخی شرایط، ناوبرها باید از مناطق قابل کشتیرانی از مکان فعلی کشتی برای هدایت ناوبری کشتی آگاه باشند، به عنوان مثال، کشتی ماهیگیری باید به طور تصادفی در برخی مناطق دریایی حرکت کند. شکل 10 نمونه ای از تحلیل بصری در دریای قطب شمال است.
نقطه زرد در شکل 10 مکان فعلی کشتی است و ناحیه چند ضلعی سبز ناحیه قابل مشاهده یا قابل کشتیرانی است که می توانیم Isovist را همانطور که در بخش 2.3 توضیح داده شد اعمال کنیم . ما الگوریتم Isovist را به عنوان یک ابزار تحلیل فضایی پیادهسازی میکنیم و آن را به عنوان بخشی از NavSpace برای پشتیبانی از ناوبری یخ دریا ادغام میکنیم. لازم به ذکر است که گرچه ایزویستابزاری برای شناسایی مناطق قابل کشتیرانی یا قابل مشاهده در هنگام حرکت در دریا ایجاد شده است، بر اساس مرز منطقه دید، ما می توانیم اطلاعات بیشتری از منطقه قابل دسترسی بدانیم، به عنوان مثال، آیا نزدیک خط ساحلی است یا وجود دارد. نوعی یخ این ابزار می تواند به ناوبر در تصمیم گیری سریع در برخی شرایط اضطراری کمک کند.
همچنین لازم به ذکر است که اگرچه نسل کوتاه ترین و امن ترین مسیر و همچنین ایزویستتجزیه و تحلیل خودکار است و در زمان واقعی، پردازش داده ها نیمه خودکار است و در زمان واقعی نیست. برای مثال، تولید خطوط اسکلت با استفاده از یک رایانه رومیزی معمولی با پیکربندی معمولی برای هر نوع کشتی با استفاده از نمودارهای یخی هفتگی، حدود ده دقیقه طول می کشد. هنگامی که پردازش داده ها انجام شد، اولیه سازی “گراف شبه شبکه جاده” حدود دو دقیقه طول می کشد. Canadian Ice Service داده های یخ را به صورت روزانه یا هفتگی به روز می کند، بنابراین زمان کافی برای پردازش داده های یخ برای پشتیبانی از ناوبری یخ دریا وجود دارد. در آینده، در صورتی که دادههای یخ دریا در زمان واقعی بهروزرسانی شوند، باید یک روش پویا نمودار Voronoi برای تولید اسکلتهای ناوبری یخ دریا در زمان واقعی ایجاد شود، به این معنی که به جای بهروزرسانی کل نمودارهای Voronoi، فقط یخ دریا تغییر یافته است. مناطق بازسازی خواهد شد.
4. نتیجه گیری
در این مطالعه، ما چندین سهم جدید مهم در ادبیات پشتیبانی خدمات ناوبری خودکار در یخ در یک زمینه جغرافیایی زمانی انجام میدهیم. از دیدگاه روششناختی، ما الگوریتمهایی را برای مسیریابی خودکار کشتی و تجزیه و تحلیل بصری بر اساس اعداد یخی رسمی میکنیم و یک بسته GIS تحلیلی ایجاد میکنیم. این ابزار به عنوان یک ابزار منبع باز (پیوند برای دانلود در [ 31 ] موجود است) برای اعتبارسنجی و گسترش در دسترس است. این ابزار آسان برای استفاده ArcGIS همچنین برای خوانندگان علاقه مند در تحقیقات مربوطه مفید است، به عنوان مثال، مطالعه ناوبری داخلی. روش با استفاده از داده های آرشیو سرویس یخ کانادا نشان داده شده است.
تعدادی از مطالعات آینده را می توان انجام داد. ما ظرفیت جهتیابی خودکار در دریا را در زمان واقعی نشان دادهایم و آن را در یک بسته منبع باز GIS پیادهسازی کردهایم. یک نسخه آنلاین با داشبورد بلادرنگ قرار است برای آژانس ناوبری یخ دریا با یکپارچهسازی فیدهای دادههای زنده و انواع دیگر رویدادهای دریایی در زمان واقعی برای مدیریت عملیات طراحی شود، که به محققان بینش جدیدی در مورد پشتیبانی ناوبری یخ دریا در زمان واقعی ارائه میکند. . در مورد اعتبارسنجی روش ها و نتایج، به ویژه استفاده از مسیرهای کشتی واقعی، تا زمانی که به داده های ناوبری واقعی دسترسی داشته باشیم، کار آینده ما خواهد بود.
منابع
- اسنایدر، دی. ناوبری یخی در گذرگاه شمال غربی. In Proceedings of the Ocean Innovation 2005, Rimouski, QC, Canada; کبک، QC، کانادا، 23 اکتبر 2005.
- حمل و نقل کانادا سیستم کشتیرانی رژیم یخی قطب شمال (AIRSS): بسته کمکی کاربر برای اجرای سیستم کشتیرانی رژیم یخی قطب شمال (AIRSS) ؛ حمل و نقل کانادا: اتاوا، ON، کانادا، 1998. [ Google Scholar ]
- بل، تی. بریگز، آر. باخمایر، آر. لی، اس. افزایش دانش Inuit برای سفر ایمن به یخ دریا – سیستم اطلاعات SmartICE. در Oceans-St. جان ؛ IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2014؛ صفحات 1-9. [ Google Scholar ]
- هیئت ایمنی حمل و نقل کانادا در دسترس آنلاین: http://www.tsb.gc.ca/eng/stats/marine/2012/ss12.asp (در 17 ژانویه 2016 قابل دسترسی است).
- بری، آر. پایگاه داده یخ دریا. در ژئوفیزیک یخ دریا ; Untersteiner, N., Ed. Plenum Press: نیویورک، نیویورک، ایالات متحده آمریکا، 1986; صص 1099-1134. [ Google Scholar ]
- Drinkwater، KF داده های اقلیمی برای شمال غربی اقیانوس اطلس: پایگاه داده یخ دریا برای خلیج سنت لارنس و قفسه اسکاتلندی . Fisheries & Oceans Canada, Maritimes Region, Ocean Sciences Division, Bedford Institute of Oceanography: Halifax, NS, Canada, 1999. [ Google Scholar ]
- نایت، RW مقدمه ای بر پایگاه داده جدید یخ دریا. ان گلاسیول. 1984 ، 5 ، 81-84. [ Google Scholar ]
- لنورمند، اف. دوگوای، CR; Gauthier, R. توسعه پایگاه داده تاریخی یخ برای مطالعه تغییرات آب و هوا در کانادا. هیدرول. روند. 2002 ، 16 ، 3707-3722. [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. لی، اس. به سمت یک مدل پایگاه داده مکانی-زمانی برای پورتال خدمات یخ کانادا. در مجموعه مقالات کنفرانس سالانه موسسه ژئوماتیک کانادا و کنفرانس بین المللی 2013 در مورد مشاهده زمین برای تغییرات جهانی (EOGC’2013)، تورنتو، ON، کانادا، 5-7 ژوئن 2013.
- ایکن، اچ. لاوکرافت، آل. خدمات سیستم یخ دریای Druckenmiller، ML: چارچوبی برای کمک به شناسایی و برآوردن نیازهای اطلاعاتی مربوط به شبکههای رصد قطب شمال. قطب شمال 2009 ، 62 ، 119-136. [ Google Scholar ] [ CrossRef ]
- لی، اس. شیونگ، سی. Ou, Z. وب GIS برای اطلاعات یخ دریا و آرشیو سرویس یخ. ترانس. GIS 2011 ، 15 ، 189-211. [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. لی، اس. هوانگ، دبلیو. Gong, J. طراحی APIهای وب یخ دریا برای خدمات اطلاعات یخ. علوم زمین آگاه کردن. 2015 ، 8 ، 483-497. [ Google Scholar ] [ CrossRef ]
- Ou, Z. یک سیستم اطلاعات مکانی یکپارچه برای سرویس یخ. در مجموعه مقالات بیستمین کنگره ISPRS، استانبول، ترکیه، 12 تا 23 ژوئیه 2004. ص 12-23.
- موسسه تحقیقات قطب شمال و قطب جنوب (AARI). در دسترس آنلاین: http://www.aari.nw.ru/index_en.html (در 17 ژانویه 2016 قابل دسترسی است).
- سرویس یخ کانادا (CIS)، محیط زیست کانادا. در دسترس آنلاین: https://www.ec.gc.ca/glaces-ice (در 17 ژانویه 2016 قابل دسترسی است).
- موسسه هواشناسی فنلاند (FMI). در دسترس آنلاین: http://en.ilmatieteenlaitos.fi/ (دسترسی در 17 ژانویه 2016).
- ناسا مروری بر EOSDIS. در دسترس آنلاین: https://earthdata.nasa.gov/about-eosdis (دسترسی در 17 ژانویه 2016).
- موسسه ملی مرکز یخ (NIC). در دسترس آنلاین: http://www.natice.noaa.gov (دسترسی در 17 ژانویه 2016).
- کاتالوگ داده قطبی (PDC). در دسترس آنلاین: https://www.polardata.ca/ (دسترسی در 17 ژانویه 2016).
- چن، ایکس. لیو، ایکس. لی، اس. Chow, A. یک مطالعه مقایسه ای بر روی سه تکنیک تجزیه و تحلیل EOF با استفاده از چندین دهه داده های غلظت دریا-یخ قطب شمال. جی سنت. دانشگاه جنوب 2015 ، 22 ، 2681-2690. [ Google Scholar ] [ CrossRef ]
- راینر، NA; پارکر، دی. هورتون، ای بی. فولاند، CK; الکساندر، LV; روول، DP; کنت، EC; Kaplan، A. تجزیه و تحلیل جهانی دمای سطح دریا، یخ دریا، و دمای هوای دریایی در شب از اواخر قرن نوزدهم. جی. ژئوفیز. پاسخ: اتمس. 2003 ، 108 . [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- روتروک، دی. توماس، DR; Thorndke، AS تجزیه و تحلیل مؤلفه اصلی داده های مایکروویو غیرفعال ماهواره ای بر روی یخ دریا. جی. ژئوفیز. Res.: Oceans 1988 , 93 , 2321-2332. [ Google Scholar ] [ CrossRef ]
- هاول، SE; Yackel، JJ ارزیابی ترانزیت کشتی از تغییرپذیری یخ دریا در غرب قطب شمال، 1969-2002: مفاهیم برای ناوبری کشتی. می توان. J. از راه دور. Sens. 2004 , 30 , 205-215. [ Google Scholar ] [ CrossRef ]
- Khon، VC; موخوف، I. تغییرات آب و هوای قطب شمال و شرایط احتمالی ناوبری قطب شمال در قرن بیست و یکم. ایزوستیا. اتمس. اقیانوس. فیزیک 2010 ، 46 ، 14-20. [ Google Scholar ] [ CrossRef ]
- MaxSea، نرم افزار ناوبری دریایی. در دسترس آنلاین: http://www.maxsea.com (در 17 ژانویه 2016 قابل دسترسی است).
- سرویس یخ کانادا (CIS). کتابچه راهنمای رویه های استاندارد برای مشاهده و گزارش وضعیت یخ ; Canadian Ice Service, Environment Canada: Ottawa, ON, Canada, 2005. [ Google Scholar ]
- گارد ساحلی کانادا (2012). ناوبری یخ در آبهای کانادا ; برنامه یخ شکن، خدمات دریایی، گارد ساحلی کانادا، ماهیگیری و اقیانوس ها کانادا: اتاوا، ON، کانادا، 2012. [ Google Scholar ]
- ترنر، آ. Penn, A. ساخت ایزوویست ها به نحو نحوی: تحلیل ادغام ایزوویستی. در جریان دومین سمپوزیوم بین المللی در نحو فضا، برازیلیا، برزیل، 29 مارس 1999.
- CanICE. در دسترس آنلاین: http://geocolab.ryerson.ca/ice (دسترسی در 10 مارس 2016).
- زمين شناسي. در دسترس آنلاین: http://geology.com (دسترسی در 10 مارس 2016).
- NavSpace. در دسترس آنلاین: https://github.com/xintao/NavSpace (دسترسی در 10 مارس 2016).
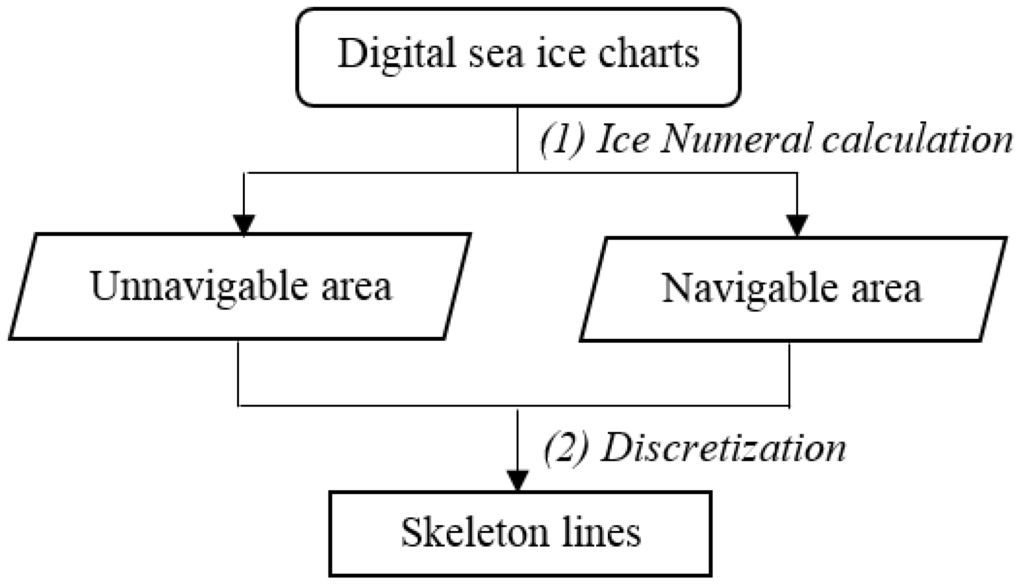
شکل 1. یک راه حل دو مرحله ای برای ناوبری خودکار یخ.
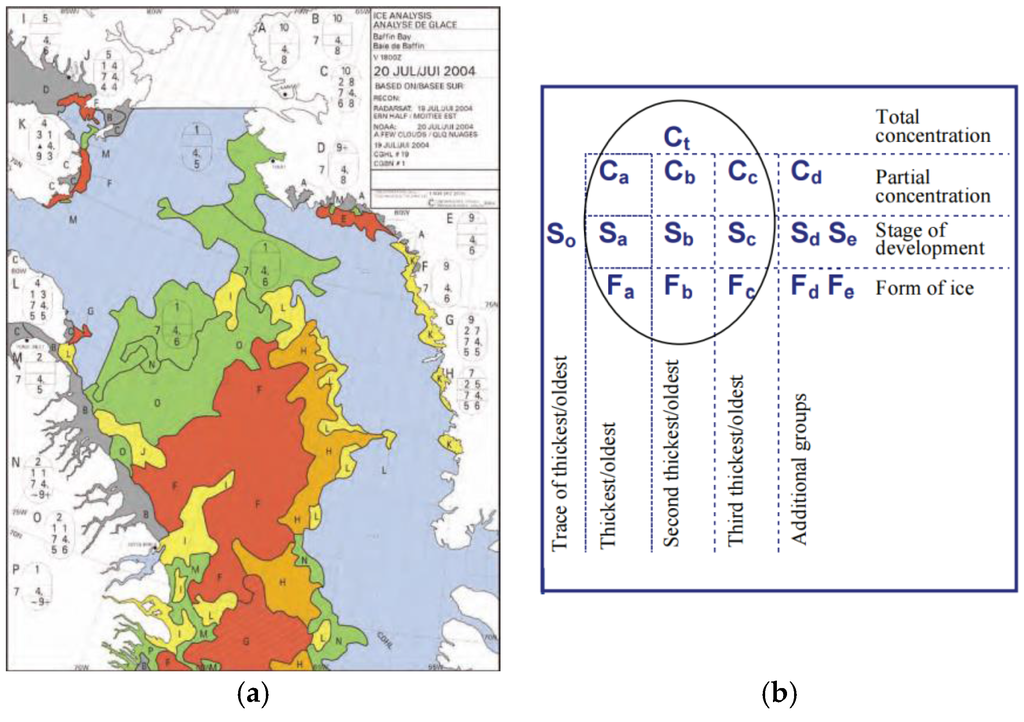
شکل 2. مثال نمودار روزانه یخ با کد رنگی ( a ) و کد تخم مرغ ( b ) رژیم یخ. مناطق رنگی رژیم های یخی هستند. C a , C b , و C c و F a , F b و F c به ترتیب با S a , Sb و Sc مطابقت دارند . (منبع: [ 26 ]، که در آن دو رقم مستقیماً بدون مشکل کپی رایت ذکر شده است).
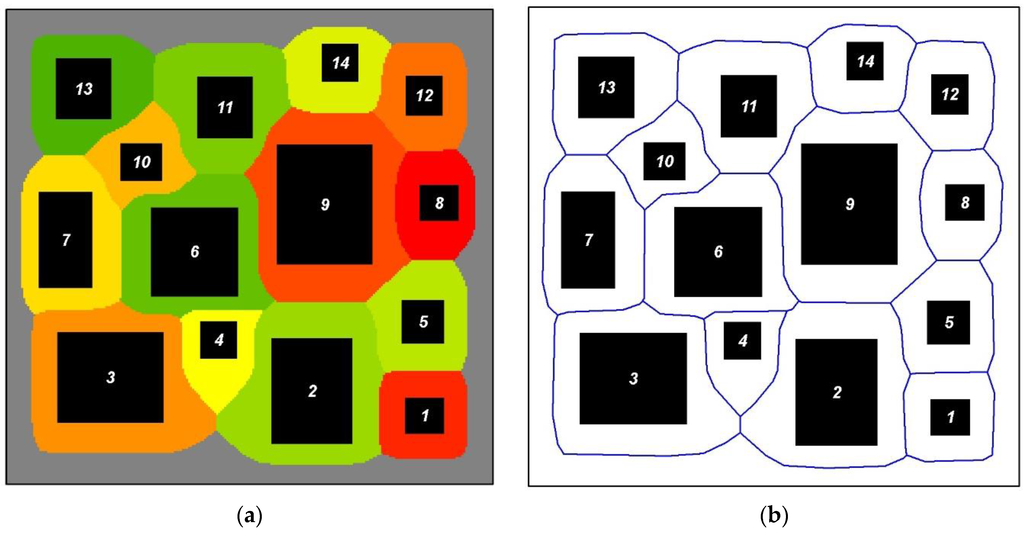
شکل 3. نمودارهای ورونوی (مناطق رنگی) از 14 مانع (مستطیل های سیاه) در سمت چپ ( a ) و اسکلت (مرزهای نمودارهای ورونوی) در خطوط آبی در سمت راست ( b ).

شکل 4. اسکلت (39 خط آبی) و اتصالات (26 نقطه قرمز) در سمت چپ ( a ) و نمودار دوگانه آن در سمت راست ( b ): نقاط آبی به معنای 39 خط اسکلت و 78 خط قرمز به معنای اتصالات است.

شکل 5. مثال ایزوویستی در محیط مصنوعی، که در آن مستطیل های سیاه مناطق غیرقابل پیمایش هستند، نقطه زرد موقعیت فعلی، ناحیه قرمز ناحیه دید و خط آبی خط الراس است که طولانی ترین خط در داخل دید است. حوزه.
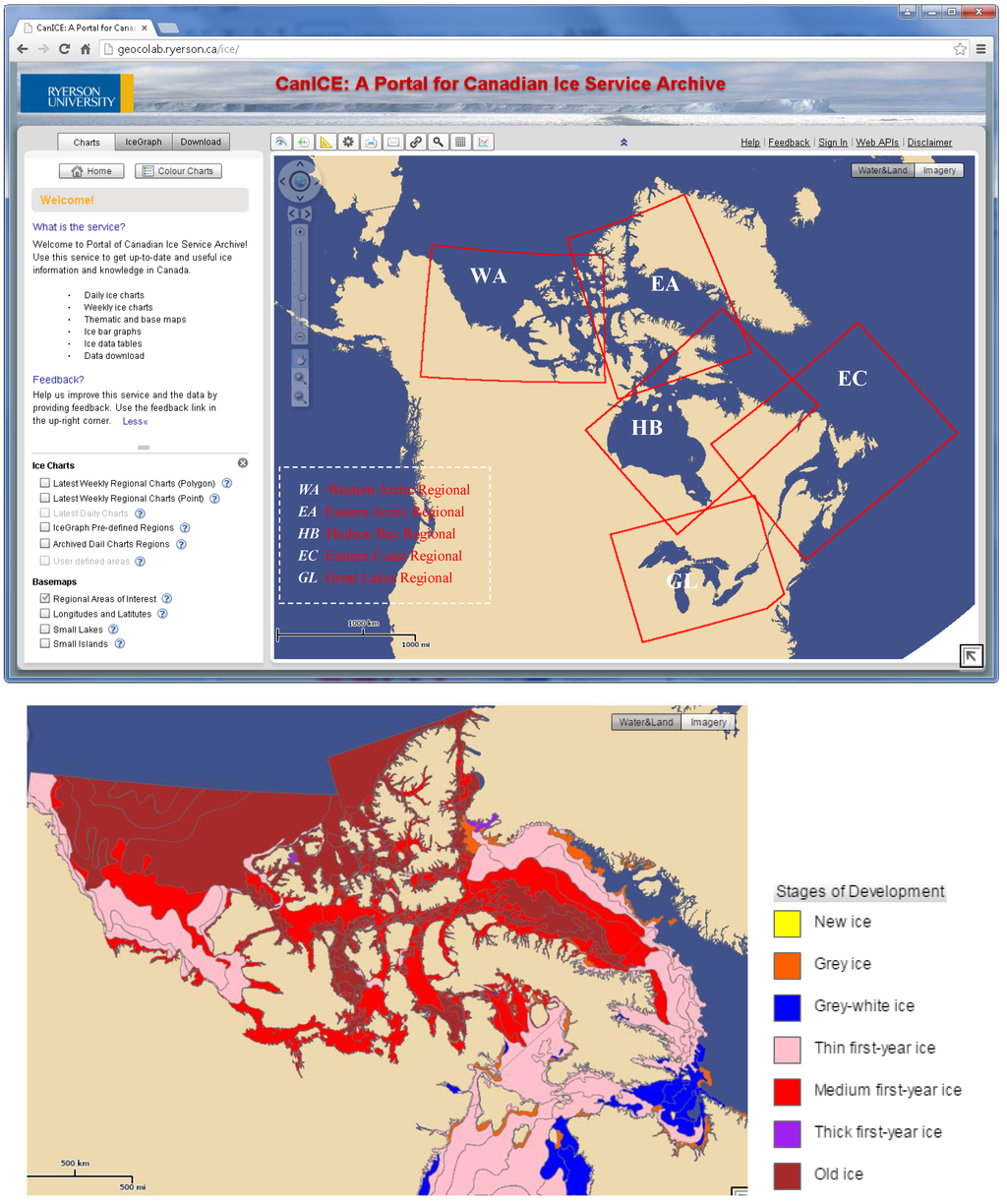
شکل 6. پنج منطقه مورد علاقه در دریای قطب شمال ( قسمت بالایی ) که در آن نمودارهای دیجیتال یخ دریا در دسترس هستند، و یک نمونه نمودار دیجیتالی یخ دریا که بر اساس مراحل توسعه ارائه شده است ( قسمت پایین ). (منبع: برگرفته از [ 29 ]، که در آن دو شکل بدون مشکل کپی رایت اقتباس شده است).

شکل 7. رژیم های قابل کشتیرانی (یا مثبت) به رنگ آبی، رژیم های غیرقابل کشتیرانی (یا منفی) به رنگ قرمز و خطوط اسکلت به رنگ سفید در 2 فوریه 2015 برای کشتی نوع CAC3.
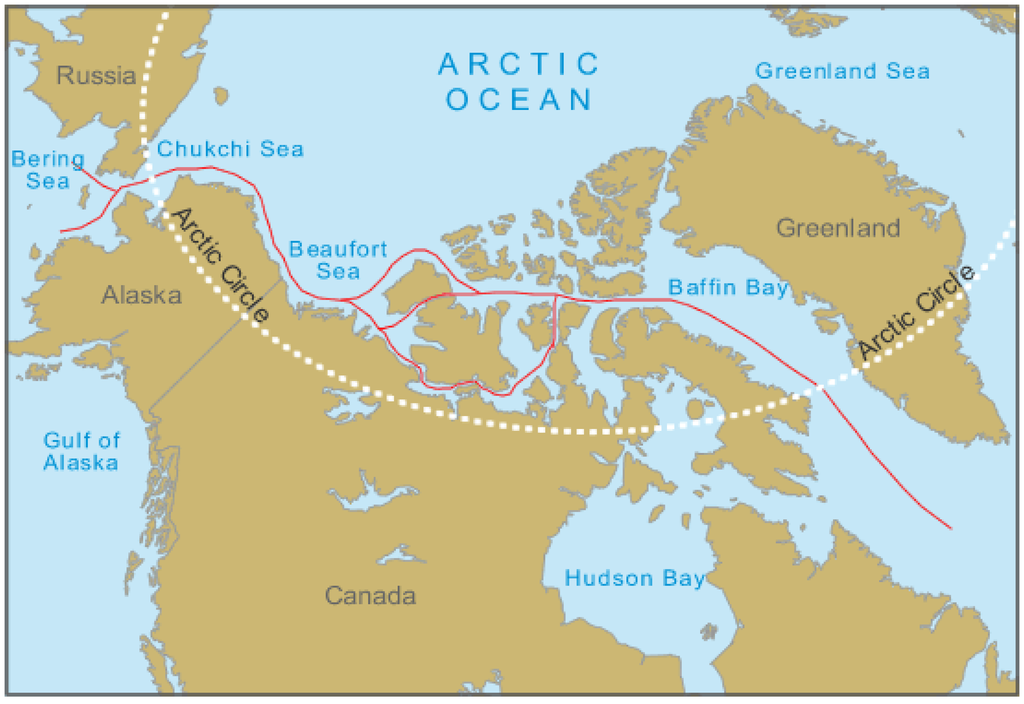
شکل 8. گذرگاه شمال غربی: خطوط قرمز مسیرهای احتمالی کشتی هستند (منبع: [ 30 ]، جایی که این رقم مستقیماً بدون مشکل کپی رایت ذکر شده است).

شکل 9. کوتاه ترین و ایمن ترین مسیر ( a ) به رنگ مشکی و وزنی ترین و ایمن ترین مسیر ( b ) به رنگ سیاه بین جفت مبدا و مقصد برای کشتی نوع CAC3.
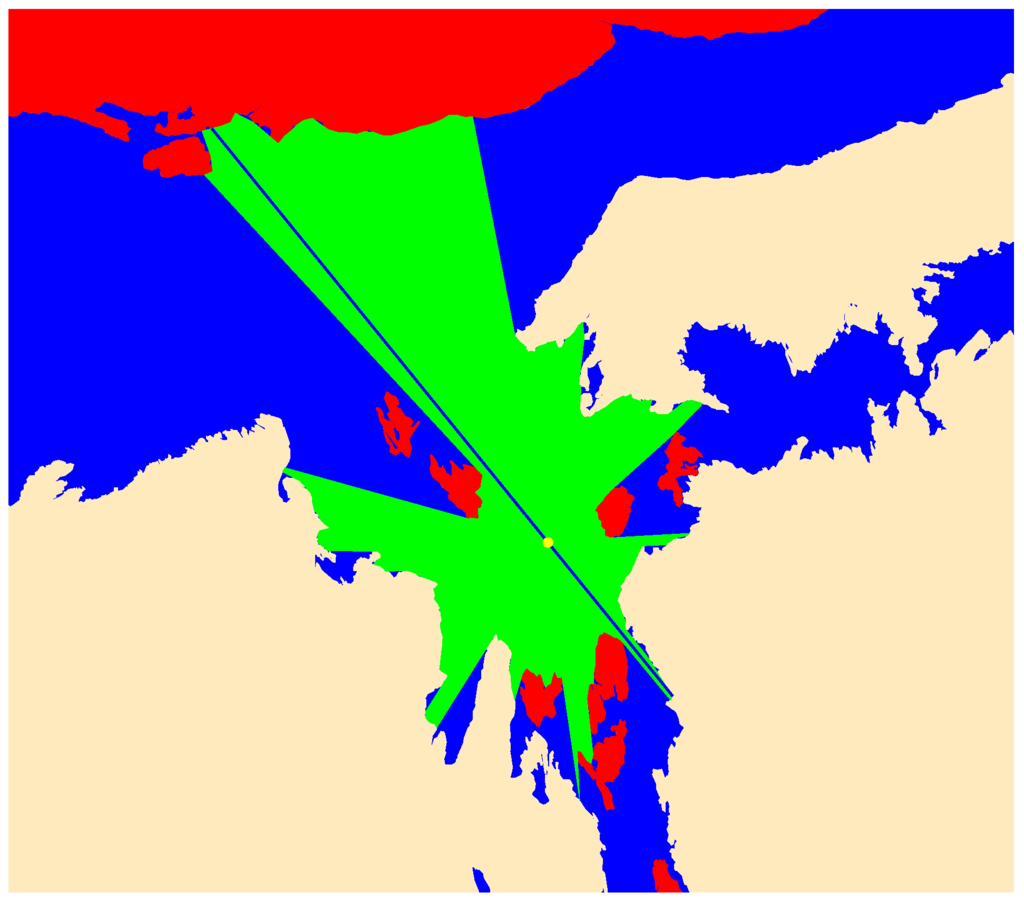
شکل 10. منطقه قابل کشتیرانی/قابل مشاهده به رنگ سبز با استفاده از Isovist برای کشتی نوع CAC3 ایجاد شده است، جایی که نقطه زرد موقعیت فعلی است.

جدول 1. ضرب کننده یخ (IM) بر اساس انواع کشتی (منبع: [ 27 ]).
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons by Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر