

چکیده
در سطح جهانی، بیشتر خسارات مربوط به آب و هوا توسط رعد و برق ایجاد می شود. علاوه بر سیل، باد شدید و تگرگ، یکی از اثرات عمده رعد و برق زمینی رعد و برق است. بنابراین، بررسی های رعد و برق، از جمله تشخیص، شناسایی خوشه، ردیابی و پخش کنونی ضروری است. برای فعال کردن تصمیمات قابل اعتماد، ویژگیهای خوشهای رعد و برق فعلی و پیشبینیشده و همچنین نتایج تجزیه و تحلیل باید به مناسبترین روش نمایش داده شوند. مقاله ما چارچوبی را معرفی میکند که شامل شناسایی، ردیابی، پخش کنونی و بهویژه تجسم و تحلیل آماری دادههای رعد و برق دینامیک در فضای سهبعدی است. این مقاله به طور خاص بر روی قادر ساختن کاربران به انجام تجزیه و تحلیل بصری داده های رعد و برق به منظور شناسایی و تفسیر الگوهای مکانی-زمانی تعبیه شده در داده های رعد و برق و دینامیک آنها متمرکز است. یک رابط کاربری گرافیکی (GUI) توسعه داده شده است، که در آن آهنگهای رعد و برق و خوشههای رعد و برق پیشبینیشده، از جمله قطعیت پیشبینی آنها، را میتوان در یک نمای سه بعدی یا در یک مکعب فضا-زمان بررسی کرد. برخلاف کار قبلی، رویکرد ما بینشی در مورد پویایی خوشههای رعد و برق سه بعدی و ویژگیهای خوشهای گذشته و پیشبینیشده در طول زمان ارائه میکند. نتیجه می گیریم که یک اکتشاف بصری تعاملی در ترکیب با یک تجزیه و تحلیل آماری می تواند دانش جدیدی را در تحقیقات رعد و برق ارائه دهد و بنابراین، از تصمیم گیری در پیش بینی آب و هوا یا جلوگیری از آسیب صاعقه پشتیبانی می کند. از جمله قطعیت پیشبینی آنها، میتوان در یک نمای سه بعدی یا در یک مکعب فضا-زمان بررسی کرد. برخلاف کار قبلی، رویکرد ما بینشی در مورد پویایی خوشههای رعد و برق سه بعدی و ویژگیهای خوشه در گذشته و پیشبینیشده در طول زمان ارائه میکند. نتیجه می گیریم که یک اکتشاف بصری تعاملی در ترکیب با یک تجزیه و تحلیل آماری می تواند دانش جدیدی را در تحقیقات رعد و برق ارائه دهد و بنابراین، از تصمیم گیری در پیش بینی آب و هوا یا جلوگیری از آسیب صاعقه پشتیبانی می کند. از جمله قطعیت پیشبینی آنها، میتوان در یک نمای سه بعدی یا در یک مکعب فضا-زمان بررسی کرد. برخلاف کار قبلی، رویکرد ما بینشی در مورد پویایی خوشههای رعد و برق سه بعدی و ویژگیهای خوشه در گذشته و پیشبینیشده در طول زمان ارائه میکند. نتیجه می گیریم که یک اکتشاف بصری تعاملی در ترکیب با یک تجزیه و تحلیل آماری می تواند دانش جدیدی را در تحقیقات رعد و برق ارائه دهد و بنابراین، از تصمیم گیری در پیش بینی آب و هوا یا جلوگیری از آسیب صاعقه پشتیبانی می کند.
کلید واژه ها:
تجسم رعد و برق ; تکنیک های کارتوگرافی برای تجزیه و تحلیل بصری ; تجزیه و تحلیل بصری جغرافیایی ; فضا-زمان-مکعب ; خوشه بندی نقطه ; ژئو تجسم شناختی ; نقشه برداری تعاملی داده کاوی ; اطلاعات بزرگ
1. مقدمه
تجسم مکانیزمی است که به درک و کشف روابط پیچیده در یک زمینه فضایی کمک می کند. لزوماً ارتباطات اطلاعاتی را بهبود نمی بخشد، اما هدف آن افزایش احتمال انجام این کار است. نقشه ها از محبوب ترین تجسم ها هستند. آنها معمولاً برای نمایش اطلاعات جغرافیایی به شکل انتزاعی استفاده می شوند که ممکن است شناسایی الگوهای فضایی را در سطوح مختلف تسهیل کند و بر ویژگی های مشخصه متعلق به پدیده های فضایی مربوطه تأکید کند. در جامعه امروزی، میزان اطلاعات و داده های مشترک به طور مداوم در حال افزایش است. بنابراین، نیاز روزافزونی به انتزاع داده وجود دارد [ 1]. نمایش مستقیم داده های دیجیتال روی سطح نمایشگر از منظر نقشه کشی منطقی نیست. در عوض، نقشهها بهطور دقیق طراحی شدهاند تا الگوهایی را نشان دهند که ممکن است فوراً در دنیای واقعی شناسایی نشوند [ 2 ]. افزایش سریع حجم و پیچیدگی دادهها که هماکنون به نمایش بصری و تجزیه و تحلیل نیاز دارد، باعث ایجاد رشته علمی جدید ویژوال آنالیز [ 3 ] شده است و نقشههای مرسوم به طور قابلتوجهی گسترش یافته و برای ارائههای گرافیکی بیشتر توسعه یافتهاند. در این مقاله، نقشه ها به عنوان زیر مجموعه ای از تجسم ها در نظر گرفته می شوند.
تحقیقات در زمینه تجزیه و تحلیل بصری تعاملی از تخصص در تجزیه و تحلیل بصری، تجزیه و تحلیل داده های اکتشافی، طراحی رابط و ارگونومی شناختی استفاده می کند. تئوری های ارگونومی شناختی می توانند از شناسایی محدودیت ها برای تجسم ها و تفسیر آنها حمایت کنند [ 4 ]. از این محدودیتها و نقشها و ویژگیهای بینندگان، میتوان پارامترهایی را برای طراحی تجسم استخراج کرد. اگر تجسم در یک سیستم تعاملی تعبیه شده باشد، دارای ارزش افزوده دو برابری خواهد بود – کاربران را توانمند می کند و از رفتار کاربر درس می گیرد. مطالعات قبلی تجزیه و تحلیل بصری و ابزارهای اکتشافی برای مجموعه داده های نقطه ای را می توان در [ 5 , 6 , 7 , 8 , 9 ,10 ، 11 ]. مبانی نظری بیشتر در تجزیه و تحلیل بصری مکانی و زمانی در [ 2 ، 3 ، 12 ، 13 ، 14 ، 15 ، 16 ] ارائه شده است. بررسی های خلاصه شده در این مقاله از تحلیل داده های بصری و رویکردهای تحلیل بصری پشتیبانی می کند که در تعدادی از پروژه های تحقیقاتی مورد بررسی قرار گرفته اند. به عنوان مثال، در سال 2004، مرکز ملی تجسم و تجزیه و تحلیل (NVAC) تاسیس شد [ 17 ]. NVAC کارشناسانی را از رشتههای مختلف جمعآوری کرد و یک دستور کار تحقیقاتی برای تجزیه و تحلیل بصری پیشنهاد کرد. VisMaster – یک پروژه اقدام هماهنگی اروپایی – همچنین بر رشته تحقیقاتی ویژوال آنالیز تمرکز دارد.18 ]. علاوه بر این، یک گروه کاری از پروژه MOVE بر تجزیه و تحلیل بصری برای مسائل حرکتی و شناختی تمرکز دارد [ 19 ]. هدف اصلی MOVE (COST Action IC0903) توسعه روشهای بهبودیافته برای استخراج دانش از مقادیر انبوه داده در مورد اجسام متحرک است. تقاضا برای استفاده کامل از پیشرفت فنی که امکان تصویرسازی شخصی، نمایشگرهای چندوجهی (پویا، متصل، چند بعدی)، ترکیبی از واقعیت و تجسم، و مزایای کانال های ادراکی غیربصری را فراهم می کند، در [ 20 ] مورد تاکید قرار گرفت.]. با توجه به دستور کار تحقیقاتی انجمن بین المللی کارتوگرافی، یک موضوع مهم در Geovisualization و Visual Analytics این است که “تکنیک های Geovisualization، رسانه نقشه را گسترش داده اند تا نمایش داده های پویا، سه و چهار بعدی را در بر بگیرد” [ 21 ].
علاوه بر این، در [ 2 ] بیان شده است که کاوش بصری کارآمد ممکن است امکان تجزیه و تحلیل مجموعه داده ها را در زمان فراهم کند. به این ترتیب، نیاز به ترکیب داده های بزرگ معمولا افزایش می یابد، اما روش های به روز ممکن است به اندازه کافی برای تجزیه و تحلیل بصری موثر نباشند. بیش از حد قابل توجه و اختلال بینایی ممکن است منجر به نمایش داده های ناخوانا شود. علاوه بر این، تشخیص، ردیابی و تفسیر اجزای بصری که همزمان در حال تغییر فراوان هستند، همیشه آسان نیست [ 2 ]. در [ 22 ]، چالشهای موجود در تجزیه و تحلیل بصری در مقیاس فوقالعاده شرح داده شدهاند، که به موجب آن به طور خاص به دو مورد از این چالشها نیز در این کار پرداخته شده است: تجزیه و تحلیل ویژگیهای زمانی تکاملیافته. خلاصه سازی داده ها و تریاژ برای پرس و جو تعاملی.
بررسی الگوهای پویا همچنین با هدف شناسایی رویدادهای مبتنی بر مکان که در طول زمان ظاهر می شوند و به یافتن زمان، مکان و دلایل رویدادها کمک می کند. رویدادها و رفتار الگوی آنها نشان دهنده سطح بالاتری از دانش در مقایسه با تغییرات است [ 23 ]. بنابراین برای تصمیم گیرندگان ارزش بیشتری دارند. یک رویداد را می توان به عنوان یک تغییر مهم در یک دوره زمانی خاص یا که در یک لحظه خاص از زمان اتفاق می افتد درک کرد. علاوه بر این، رفتارهای الگو می تواند بسیار پیچیده و نامنظم باشد. با این وجود، آنها را می توان به صورت بصری برای تجزیه و تحلیل بیشتر نشان داد [ 23 ].
رعد و برق یک رویداد بسیار پیچیده است. فلاش در مجموع تخلیه رعد و برق است. مدت زمان متوسط فلاش 0.5 ثانیه است. استروک یک تخلیه جزئی است که از یک جریان ساز هدایت کننده رو به پایین با شدت نور کم و به دنبال آن یک جریان برگشتی رو به بالا با شدت نور بالا تشکیل شده است. یک فلاش ممکن است از یک ضربه یا یک سری ضربه در کانال های مشابه یا مجاور تشکیل شود [ 24 ]. در این کار ما فقط از اصطلاح رعد و برق استفاده می کنیم. داده های مورد استفاده، نقاط رعد و برق شناسایی شده هستند، که به موجب آن هر نقطه رعد و برق مربوط به تخلیه فردی (تک ضربه) است.
در این مطالعه، “رویداد” به وقوع و پیشبینی طوفانهای تندری اشاره دارد که توسط خوشههای رعد و برق ردیابی شده و اکنون پخششده نشان داده میشوند. ما مفهومی را برای تجزیه و تحلیل بصری خوشههای رعد و برق پویا به صورت سه بعدی بررسی میکنیم. ما به طور خلاصه نحوه تشخیص داده های رعد و برق و نحوه ردیابی و پخش مجدد خوشه های رعد و برق را توضیح می دهیم. اصطلاح خوشه رعد و برق برای تعریف رعد و برق های خوشه ای در زمان و مکان برای نمایش بخشی از یک طوفان تندری با فعالیت های رعد و برق استفاده می شود. اصطلاح “اکنون” به پیش بینی خوشه های رعد و برق برای دوره های زمانی کمتر از چند ساعت اشاره دارد.
این مقاله بر روی تجسم دادههای موقعیت رعد و برق دینامیکی تجربی متمرکز است. ما قصد نداریم هیچ تحلیلی از پیامدهای هواشناسی رعد و برق ارائه کنیم. علاوه بر این، ما درجه کاربرد تجسم ارائه شده را برای انواع مختلف طوفان در نظر نمی گیریم. هدف ما ارائه یک چارچوب محاسباتی برای تجسم رعد و برق سه بعدی داده های تاریخی داده شده در قالب یک ابزار رابط کاربری گرافیکی، از جمله برون یابی هندسی مبتنی بر ریاضی آن در فضا و زمان تا حد مجاز توسط داده ها است. هدف این کار ایجاد یک راه حل کامل ردیابی و پخش کنونی نیست. در عوض، هدف ما این است که کاربران را قادر به انجام تجزیه و تحلیل بصری و آماری ویژگیهای خوشه رعد و برق ردیابی شده و پخششده در یک سیستم یکپارچه کنیم.
2. چارچوب روششناختی – وضعیت فعلی
2.1. تشخیص داده های رعد و برق و دقت موقعیت
داده های تست رعد و برق سه بعدی توسط شبکه تشخیص صاعقه (LINET) [ 25 ]، یک شبکه تشخیص رعد و برق در اروپا ارائه می شود. LINET در دانشگاه مونیخ (دپارتمان فیزیک) تأسیس شد و توسط nowcast GmbH در سال 2006 به بهره برداری دائمی رسید. این شبکه در حال حاضر شامل 130 حسگر است که در 30 کشور اروپایی توزیع شده اند. کسب رعد و برق در ارتفاع انتشار در ابر (IC) منحصر به فرد است. همانطور که در [ 26 ، 27 ] بیان شد، دقت مکان 2 بعدی حدود 150 متر است. دقت ارتفاع نقاط رعد و برق درون ابر حدود 10% است. به عنوان مثال، صاعقه IC در ارتفاع 10 کیلومتری دارای دقت +/-1 کیلومتر است.
2.2. رعد و برق و رعد و برق سلول Nowcasting
بخش اصلی بررسی طوفان تندری، شناسایی، ردیابی و پخش سلول های رعد و برق است. الگوریتم های رعد و برق Nowcasting از سه مرحله تشکیل شده است: شناسایی سلول، ردیابی سلول، و پیش بینی سلول. Nowcasting شامل توصیف دقیق آب و هوای فعلی به همراه پیشبینیهای بهدستآمده از برونیابی برای یک دوره تا شش ساعت قبل است [ 28 ].
تئوری های تحلیل حرکت جمعیت یا گله فقط برای سلول های رعد و برق کاربرد محدودی دارند. از یک سو، نقاط رعد و برق را می توان به عنوان مجموعه های پویا در داخل سلول رعد و برق متحرک مشابه توصیف کرد. از سوی دیگر، نقاط رعد و برق پدیده های دو جنبه ای گسسته به عنوان رویدادهای جمعیت نیستند [ 29 ].
2.2.1. شناسایی و ردیابی سلول
روشهای موجود بر اساس دادههای ماهوارهای، دادههای رادار، دادههای رعد و برق، دمای مبتنی بر امواج مایکروویو یا ترکیبی از آنها هستند. در [ 30 ]، یک مرور کلی در مورد روشهای کنونی رعد و برق موجود ارائه شده است. در [ 31 ، 32 ، 33 ، 34 ] روش های مختلف بر اساس داده های تصویر ماهواره ای شرح داده شده است. در [ 35 ، 36 ، 37 ] راه حل های مبتنی بر داده های رادار معرفی شده اند. روشهای موجود در [ 38 ، 39 ] راهحلی را با استفاده از دادههای رادار و دادههای رعد و برق ارائه میکنند. در [ 26]، یک رویکرد شناسایی و ردیابی سلول تنها بر اساس داده های رعد و برق مشتق شده از شبکه LINET معرفی شد.
تکنیکهای ردیابی سلولی را میتوان به تکنیکهای همپوشانی که در [ 34 ، 37 ] گزارش شده، تکنیکهای همبستگی الگو محور در [ 40 ]، و تکنیکهای توابع هزینه در [ 35 ، 39 ] تقسیم کرد. برخی از رویکردهای ردیابی رفتار تقسیم سلولی و ادغام را در نظر می گیرند.
برای ردیابی داده های رعد و برق، ابتدا باید سلول ها بر اساس خوشه بندی مکانی-زمانی داده های نقطه رعد و برق شناسایی شده شناسایی شوند. معمولاً فواصل زمانی 10 تا 15 دقیقه برای تقسیم مجموعه داده های نقطه رعد و برق به فریم های زمانی اعمال می شود [ 27 ].
روشهای خوشهبندی نقطهای مکانی را میتوان به سه نوع عمده طبقهبندی کرد: روشهای مبتنی بر چگالی، سلسله مراتبی و تقسیمبندی. یک نمای کلی از روش های خوشه بندی نقطه ای موجود توسط [ 41 ] ارائه شده است. برای خوشه بندی فضایی داده های رعد و برق، معمولاً از یک روش پارتیشن بندی ساده بر اساس فاصله بین سلول های صاعقه استفاده می شود. بنابراین، ایده اصلی این است که تا زمانی که فاصله به سمت یک نقطه همسایگی از یک آستانه فراتر نرود، خوشه داده شده را گسترش دهیم. چنین روشی میتواند به خوشههایی با شکل دلخواه منجر شود و همچنین میتواند برای فیلتر کردن نویز یا نقاط پرت استفاده شود [ 42 ].
اگر سلول های رعد و برق در هر بازه زمانی شناسایی شوند، سلول های متصل را می توان برای فعال کردن ردیابی سلول اختصاص داد. بنابراین ظاهر، تغییرات در اندازه / شکل / مکان / چگالی، ادغام، تقسیم و ناپدید شدن هر سلول را می توان بررسی کرد [ 27 ].
2.2.2. Cell Nowcasting
بیشتر روشهای Nowcasting یا برونیابی روی دادههای رادار یا ماهوارهای اعمال میشوند. برخی از آنها را می توان بر روی سلول های به دست آمده از داده های نقطه رعد و برق اعمال کرد. اساسا، دو تکنیک برون یابی اصلی را می توان متمایز کرد: ردیاب ناحیه و سلول. ردیابهای ناحیهای مانند ردیابی پژواکهای رادار با همبستگی (TREC) [ 33 ] و تداوم بردارهای TREC (COTREC) [ 31 ] از همبستگی متقاطع بین نقشههای الگوی متوالی جدا شده زمانی برای یافتن میدانهای حرکتی استفاده میکنند. برای ردیابهای سلولی معمول است که مرکز سلولی را بر اساس مرکز سلولهای گذشته به آینده تعمیم دهند.
سادهترین روش برای ردیابهای سلولی برای ایجاد پیشبینی، پیشبینی سلولهای آینده از موقعیت سلولهای گذشته است. در اینجا برون یابی موقعیت های مرکز سلولی رایج است. یک “اکنون پخش مداوم” هیچ گرایش مسیری را در نظر نمی گیرد، در حالی که “اکست روند فعلی” از مدل های روند استفاده می کند تا روندهای سلولی را از آخرین تاریخچه سلولی به تصویر بکشد. به عنوان مثال TITAN (شناسایی رعد و برق، ردیابی، تجزیه و تحلیل، و پخش کنونی) [ 35 ]. GANDOLF (تولید Nowcasts پیشرفته برای استقرار در پیش بینی سیل های عملیاتی زمینی) [ 43 ] و SWIRLII (هشدار کوتاه برد در مورد طوفان های شدید باران در سیستم های محلی) [ 44 ]] یک مدل مفهومی را برای در نظر گرفتن روندهای فعلی اشیاء سلول رعد و برق به کار می گیرد. بنابراین، دانش فیزیکی در مورد تکامل سلول در نظر گرفته می شود.
با توجه به ردیابی سلول با دادههای رعد و برق، برونیابی ساده بر اساس سه یا چهار بازه زمانی متوالی مثلاً فواصل پنج یا ده دقیقهای اغلب نتایج مفیدی ایجاد میکند، به ویژه زمانی که سلولها خیلی کوتاه نیستند [ 26 ].
2.3. تجسم اکتشافی داده های رعد و برق
کارهای قبلی که با ردیابی و پخش کنونی دادههای رعد و برق سروکار دارند، فقط طرحهای دو بعدی ساده را در نظر میگیرند. خوشه های رعد و برق یا به صورت بدنه های محدب دو بعدی، با یا بدون داده های نقطه رعد و برق زیرین نمایش داده می شوند. با پیشرفت های اخیر در تشخیص و دقت داده های رعد و برق، تقاضای فزاینده ای برای تجسم چند بعدی و تعاملی وجود دارد. در کار قبلی ما [ 27 ] اولین رویکرد برای تجسم سه بعدی اکتشافی تعاملی داده های رعد و برق معرفی شد. هدف این کار بهبود رویکرد [ 27 ] و گسترش آن با تجزیه و تحلیل بصری و آماری خوشههای رعد و برق و ویژگیهای خوشهای برای 10 تا 60 دقیقه پیشبینیشده است.
کار مشابهی که بر روی ابرهای بارنده تمرکز دارد در [ 45 ] یافت می شود. داده های اولیه در [ 45 ] مجموعه ای از تصاویر ماهواره ای (2D) است در حالی که داده های اولیه در کار ما مختصات نقطه رعد و برق در 3D است. در [ 15 ] بیان شده است که یکی از چالش های محققان در زمینه ژئوتصویرسازی و تجزیه و تحلیل زمین بصری، برخورد با داده های مکانی-زمانی مختلف و یافتن راه حل های مناسب برای داده های مربوطه است. در [ 45]، یک مکعب فضا-زمان (STC) با نمادها ارائه می شود که شعاع آن متناسب با اندازه ناحیه ابری در حال بارش است. با کار خود میخواهیم نه تنها یک STC، بلکه یک نمای سهبعدی را نیز در یک ابزار کاوش تعاملی ارائه کنیم، که قصد دارد ارائههای مختلف خوشه/ مسیر رعد و برق را به کاربر ارائه دهد (به بخش 4.4.1 مراجعه کنید ). در حالی که مفهوم ردیابی سلول ابری در [ 45 ] مشابه رویکرد ردیابی خوشه صاعقه ما است، ما میخواستیم انواع نمایشهای بصری و آماری خوشهها و مسیرهای رعد و برق را معرفی کنیم. علاوه بر این، هدف ما ارائه یک رویکرد پیشبینی خوشه رعد و برق از جمله تجسم خوشههای آینده و عدم قطعیتهای آنها بود.
3. مجموعه داده تست نقاط رعد و برق
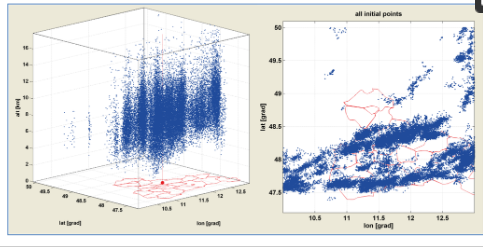
ما از نقاط رعد و برق شناسایی شده توسط LINET در 22.07.2010 در منطقه بایرن بالا، آلمان استفاده کردیم. محدوده جغرافیایی مجموعه دادههای آزمایشی ما شامل منطقه عرض جغرافیایی 47 درجه شمالی تا 50 درجه شمالی و طول جغرافیایی 10 درجه شرقی تا 13 درجه شرقی است. رعد و برق بزرگی بین ساعت 1 بعد از ظهر تا 12 بعد از ظهر از بایرن علیا عبور کرد. طوفان مورد بررسی یک خوشه رعد و برق پیش از پیشانی با فعل و انفعالات سلولی قوی بود. در کارمان، ما فقط از رعد و برق درون ابری (IC) استفاده کردیم. در مجموع، 35087 نقطه رعد و برق IC شناسایی شد. در منطقه فرودگاه مونیخ حدود 8750 صاعقه آی سی بین ساعت 18:50 تا 20:00 شناسایی شد. LINET موقعیت سه بعدی (طول جغرافیایی، طول و ارتفاع) و زمان دقیق وقوع رعد و برق (در اوج تابش رعد و برق) را ارائه کرد که با مثالی در جدول 1 نشان داده شده است.

جدول 1. نمونه ای از داده های رعد و برق ارائه شده.
مکانهای کل مجموعه دادههای آزمایش (IC lightning) به صورت نقاط آبی در شکل 1 ، سه بعدی و دو بعدی ارائه شدهاند. داده های پایه (مناطق بایرن بالا) از طریق خطوط قرمز روی زمین نشان داده شده است. علاوه بر این، مکان فرودگاه مونیخ نشان داده شده است (دایره قرمز).
شکل 1. داده های رعد و برق آی سی ( چپ : نمودار سه بعدی؛ راست : نمودار 2 بعدی).
نمودار استاتیک داده های رعد و برق همانطور که در شکل 1 نشان داده شده است برای درک دینامیک در داده های رعد و برق محدود است. برای غلبه بر این اشکال و پاسخ به سؤالات مربوط به ویژگیهای خوشه و مسیر رعد و برق گذشته و پیشبینیشده، ابزارهای اکتشافی بصری و آماری تعاملی ایجاد کردیم.
4. توسعه یک ابزار تعاملی برای تجزیه و تحلیل داده های رعد و برق
4.1. گردش کار: تشخیص رعد و برق، خوشه بندی، ردیابی، پیش بینی و تجسم
مجموعه داده های آزمایشی (رعد و برق در بایرن علیا در طول 22 ژوئیه 2010، بخش 3 را ببینید ) ابتدا از پیش پردازش شده بود. به دنبال آن، خوشه های رعد و برق شناسایی، ردیابی و اکنون پخش شدند. پس از آن، یک رابط کاربری گرافیکی لایتنینگ ایجاد شد که کاربر را قادر میسازد تا تمام نتایج ردیابی خوشهای و Nowcasting را همراه با نتایج حاصل از تجزیه و تحلیل آماری بررسی کند.
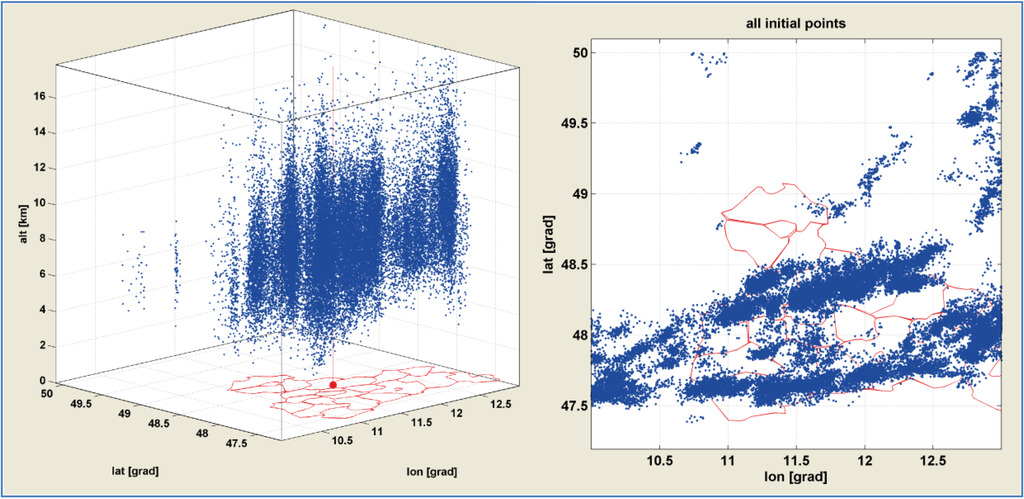
همانطور که در شکل 2 نشان داده شده است ، رویکرد ما را می توان به پنج مرحله اصلی تقسیم کرد: (1) جمع آوری و پیش پردازش داده های نقطه رعد و برق. (2) خوشه بندی زمانی و مکانی به سمت خوشه های رعد و برق. (3) ردیابی خوشه رعد و برق؛ (4) پیش بینی خوشه های رعد و برق و ویژگی های خوشه. و (5) تجزیه و تحلیل دیداری و آماری. شکل 3 یک نمای کلی از تمام پارامترهای قابل تنظیم در شناسایی خوشه، ردیابی و Nowcasting ارائه می دهد. مقادیر پارامتر مورد استفاده برای داده های آزمون در این کار با رنگ قرمز نشان داده شده است.

شکل 2. گردش کار کلی: از تشخیص داده تا تجزیه و تحلیل بصری.
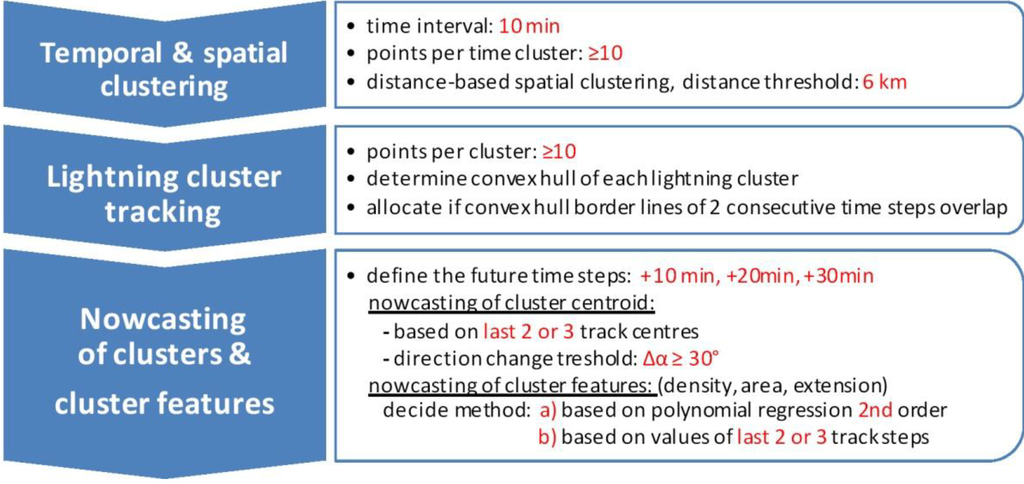
شکل 3. پارامترهای قابل تنظیم (به رنگ قرمز).
4.2. شناسایی و ردیابی خوشه رعد و برق
اول از همه داده های نقطه رعد و برق، شناسایی شده توسط شبکه LINET، به داده های رعد و برق ابر-زمین (CG) و داده های رعد و برق در ابر (IC) تفکیک شدند. برای حذف نقاط پرت، تنها از داده های IC با ارتفاع بین 2 تا 18 کیلومتر استفاده شد. در صورت نیاز، مجموعه داده نقطه رعد و برق را می توان با محدودیت های محدوده زمانی یا مکانی محدود کرد.
در مرحله دوم، داده های نقطه رعد و برق در بازه های زمانی 10 دقیقه ای تفکیک شدند. هر بازه زمانی شامل حداقل 10 امتیاز بود. پس از آن، تمام نقاط در هر بازه زمانی، با استفاده از روش خوشهبندی ساده مبتنی بر فاصله همانطور که در [ 46 ] با آستانه فاصله 6 کیلومتری توضیح داده شد، در خوشههای صاعقه گروهبندی شدند. بنابراین برای هر نقطه یک بافر با شعاع 6 کیلومتر اعمال شد. تمام نقاط درون بافرهای همپوشانی به سمت همان گروه تجمع یافتند. گروه های به دست آمده نشان دهنده خوشه های رعد و برق در بازه زمانی مناسب هستند.
در مرحله سوم، خوشه های شناسایی شده ردیابی شدند. خوشههایی که از نظر فضایی روی بدنههای محدب دوبعدی خود در دو توالی زمانی همپوشانی دارند، شناسایی و تخصیص داده شدند. این رویکرد ردیابی بر اساس روش [ 34 ، 37 ] بود. تقسیم و ادغام خوشه نیز در نظر گرفته شد. حداقل اندازه خوشه 10 امتیازی تعریف شد. افزایش این آستانه منجر به حذف خوشه های کوچکتر می شود.
برای شناسایی خوشه و ردیابی خوشه ما فقط نقاط IC را در نظر گرفتیم. این مدل ممکن است با در نظر گرفتن نقاط CG نیز بهبود یابد. با این حال، با ابزار تعاملی ما، داده های نقطه CG را می توان تجسم کرد. ما از اصطلاح “سلول صاعقه” استفاده نمی کنیم، زیرا خوشه های تعیین شده با اصطلاح “سلول” که به ابرهای رعد و برق در هواشناسی اشاره دارد، متفاوت است. در یک مسیر طوفان، چندین سلول می توانند در ارتباط با تعاملات باریک قوی و فضایی ظاهر و ناپدید شوند. بنابراین، خود خوشه را نمی توان همیشه به عنوان گروهی از رعد و برق تولید شده از یک سلول به دلیل نمونه برداری زمانی در تعیین یک خوشه مشاهده کرد.
4.3. رعد و برق Nowcasting و ارزیابی
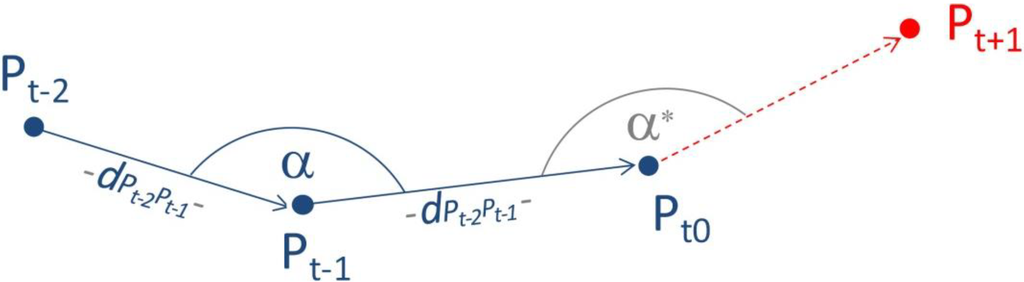
در مرحله چهارم، خوشه ها و ویژگی های خوشه اکنون پخش شدند. ما تصمیم گرفتیم وضعیت آینده خوشه ها را در 10، 20 و 30 دقیقه (Δ t ) پیش بینی کنیم. رویکرد ما برای هدف نمایشی کاملاً هندسی است. پیش بینی مکان خوشه آینده بر اساس مرکز خوشه برون یابی شده است که در شکل 4 و معادله (1) نشان داده شده است. ما یک روش ساده مبتنی بر تغییر سرعت و جهت ایجاد کردیم. بدین ترتیب، ما سه مرکز مسیر آخر را در نظر گرفتیم. بر اساس موقعیت مرکزهای خوشه قبلی (Pt – k ) ، بردار سرعت دو مرکز خوشه آخر را تعیین کردیم . ما سرعت خوشه فعلی را با میانگین سرعت (v ) از دو مرکز خوشه آخر. علاوه بر این، تغییرات جهت (زاویه α ) در نظر گرفته شد. برای مقدار α ، توصیه میشود یک آستانه را پیکربندی کنید تا از منحنیهای تنگ مسیر خوشهای ریختهشده اجتناب شود. علاوه بر این، α * (نگاه کنید به شکل 4 ) با زمان آینده پیش بینی شده Δ t ارتباط دارد. به عبارت دیگر، هر چه زمان پخش شده بیشتر باشد α * بزرگتر است. اگر فقط دو مرکز آخر یک مسیر خوشه وجود داشته باشد، زاویه α * مقدار 180 درجه داده می شود. این روش برای حالت دو بعدی توضیح داده شده است، اما برای سناریوی سه بعدی ایجاد شده است.
شکل 4. مفهوم Nowcasting Cluster Centroid (مثال دوبعدی).

پخش کنونی ویژگی های خوشه، مانند تراکم خوشه، مساحت خوشه، و گسترش خوشه، می تواند بر اساس مقادیر ویژگی ( p ) دو تا چهار مرحله زمانی آخر انجام شود. یک روش برون یابی ممکن برای ویژگی های خوشه صاعقه ممکن است رگرسیون چند جمله ای (از مرتبه دوم) باشد:


معادله (2) ضرایب تابع چند جملهای p ( x ) درجه n را پیدا میکند که دادههای داده شده، p ( xi ) با y i را به معنای حداقل مربعات مطابقت میدهد. نتیجه p یک بردار ردیفی به طول n + 1 است که حاوی ضرایب چند جمله ای در توان های نزولی است. معایب، مقادیری هستند که به طور غیر واقعی بالا یا زیر صفر هستند.
ما تصمیم گرفتیم یک روش پیشبینی مبتنی بر قاعده نمایشی برای پخش در حال حاضر ویژگی خوشهای ایجاد کنیم که بر اساس مقادیر ویژگی خوشهای سه مرحله زمانی گذشته است. بنابراین، تنها تمایل تغییر ارزش (افزایش/کاهش حدود 10/20/…%) در مقادیر ویژگی خوشه پیشبینیشده منعکس میشود.
مرکزهای خوشه ای برون یابی شده را می توان با ایجاد یک مدل یادگیری ارزیابی و بهبود بخشید. چنین مدلی مکانهای مرکز خوشهای پیشبینیشده و ویژگیهای خوشهای را با موارد بهروز شده مقایسه میکند. پس از هر بهروزرسانی، مدل میتواند پارامترهای Nowcast (مثلاً آستانه α * ) را به منظور بهبود دقت پیشبینی تطبیق دهد. تفاوت میانگین موقعیت های مرکز و ویژگی های خوشه بین داده های پیش بینی شده و به روز شده منجر به عدم قطعیت برای پیش بینی می شود. علاوه بر این، خطاهای اندازه گیری را می توان در مدل قطعیت گنجاند. ما دقت دوبعدی را برای مرکزهای خوشه ای مانند رعد و برق شناسایی شده ( acc = 150 متر) فرض می کنیم. بنابراین نتیجه می شود که عدم قطعیت ( u ) برای مرکزهای پخش شده ( Pt+ k ) را می توان با یک رویکرد اساسی، با در نظر گرفتن گام زمانی آینده ( k )، و حداکثر عدم دقت بین دو مرکز خوشه آخر همانطور که در رابطه (3) نشان داده شده است، به دست آورد:

در نتیجه، عدم قطعیت دوبعدی برای مرکزهای خوشهای ریختهشده، مقدار 450 متر را برای پیشبینی 10 دقیقهای ( k = 1)، 600 متر برای 20 متر ( k = 2) و غیره فرض میکند.
برای میانگین ارتفاع می توان همین معادله را اعمال کرد که به موجب آن میانگین مرکز حدود 10 کیلومتر منجر به دقت ارتفاع 1 کیلومتر ( acc ) می شود.
ما رویکرد اصلی ردیابی و پخش کنونی خود را (همانطور که در بخش 4.1 ، بخش 4.2 ، بخش 4.3 توضیح داده شده است) در مجموعه داده های آزمایشی اعمال کردیم. در مجموع، 19 رعد و برق شناسایی شد. Nowcasting را می توان برای هر لحظه از زمان در محدوده زمانی که به عنوان “اکنون” تعریف می شود، انجام داد. برای ارزیابی نتایج، تجزیه و تحلیل گذشته انجام شد که به موجب آن دادههای آزمون به گامهای 10 دقیقهای تفکیک شدند و مرکزهای کنونی ریختهشده تعیین شدند. پس از آن، مکانهای مرکز خوشهای پیشبینیشده و ویژگیهای خوشهای با موارد بهروز شده مقایسه شدند.
4.4. تجزیه و تحلیل بصری و آماری تعاملی ویژگیهای خوشه رعد و برق پویا
در مرحله پنجم گردش کار ما، یک مفهوم تحلیلی برای کاوش بصری و آماری ویژگیهای خوشهای گذشته و اکنون ایجاد میشود. لازم به ذکر است که تمرکز اصلی این کار بر روی دستیابی به یک راه حل کامل ردیابی و پخش کنونی نیست، بلکه بر روی توانمندسازی کاربران برای انجام تجزیه و تحلیل بصری و آماری ویژگی های خوشه رعد و برق ردیابی شده و پخش شده در یک سیستم یکپارچه است.
4.4.1. رابط کاربری گرافیک لایتنینگ (GUI)
برای ارائه یک تحلیل اکتشافی از دادههای خوشه رعد و برق پویا، یک رابط کاربری گرافیکی تعاملی (GUI) طراحی شد. رابط کاربری گرافیکی لایتنینگ شامل یک نمای سه بعدی و یک رویکرد STC برای اولین بار در [ 27 ] معرفی شد و در این کار تجسم ویژگیهای خوشهای Nowcasted بهبود و توسعه یافت.
یک متخصص رعد و برق یا رعد و برق باید اطلاعات بصری و آماری در مورد پویایی هر خوشه رعد و برق و ویژگی های آن در محدوده زمانی و مکانی مورد علاقه داشته باشد. ویژگی های خوشه و مسیر مربوطه در جدول 2 همراه با اطلاعات مربوط به ظاهر دو بعدی/سه بعدی فهرست شده است.
جدول 2. ارائه بصری اطلاعات رعد و برق گذشته و پیش بینی شده.
تجسم های نماینده یک خوشه رعد و برق ردیابی شده و اکنون پخش شده در فضای سه بعدی، نمایش ابر نقطه، مرکز و پسوند خوشه سه بعدی به شکل: بدنه محدب، بیضی و مکعب خوشه است. علاوه بر این، یک بافر عدم قطعیت را می توان برای خوشه های nowcasted نشان داد. رعد و برق سه بعدی گذشته و پیش بینی شده را می توان با یک خط یا یک خط تجسم کرد. علاوه بر این، ویژگی های مختلف خوشه بصری را می توان در مسیر نشان داد. به همین ترتیب، ارائه یک بافر عدم قطعیت را می توان برای آهنگ Nowcasted اعمال کرد.
متغیرهای گرافیکی برای پوشش تمام تغییرات گرافیکی ممکن روی نقشه قبلاً در [ 47 ] مشخص شدهاند. برتین بین هفت متغیر بصری تمایز قائل شد: شکل، رنگ، بافت، اندازه، موقعیت، جهت گیری و ارزش. او این متغیرهای بصری را با یک معناشناسی بصری ترکیب کرد تا ویژگی های داده را به عناصر بصری پیوند دهد. علاوه بر این، در [ 12 ]، وظایف تجزیه و تحلیل جغرافیایی و بنابراین، متغیرهای بصری مناسب را مشخص می کند. جدول 3 هفت متغیر گرافیکی را بر اساس [ 47 ] فهرست می کند] که می تواند برای تجسم مناسب ویژگی های خوشه صاعقه و مسیر تنظیم شود. به عنوان مثال، متغیرهای گرافیکی قابل تغییر سطح بدنه محدب (که یک خوشه رعد و برق را به شکل یک چند ضلعی دو بعدی نشان می دهد) عبارتند از: رنگ، بافت، درخشندگی، شفافیت و اشباع. این متغیرها باید به دقت انتخاب شوند تا ارائه مناسبی برای بیننده/تحلیلگر داده ارائه شود. در این زمینه، اصول کارتوگرافی (خواندنی، صحیح، کامل و زیبایی شناختی) باید تا حد امکان رعایت شود. لازم به ذکر است که متغیرهای گرافیکی مرکز خوشه می توانند به کمیت/شدت نقاط خوشه بستگی داشته باشند.
جدول 3. متغیرهای گرافیکی ویژگی های خوشه و مسیر.
رابط کاربری گرافیکی تعاملی کاربر را قادر می سازد تا داده ها را بررسی و تجزیه و تحلیل کند. در مفهوم GUI ما برای خوشه های رعد و برق، کاربر باید بتواند:
-
بارگذاری در داده های نقطه رعد و برق (x,y,z,t)
-
بین نمای سه بعدی (xyz) و STC (xyt) انتخاب کنید
-
انتخاب/ترکیب بین تجسم ویژگی های مختلف خوشه و مسیر، جدول 2 را ببینید
-
پخش اکنون را برای 10، 20، 30، …، 60 دقیقه بعدی فعال کنید
-
انطباق متغیرهای گرافیکی
-
محدودیت هایی را برای محدوده زمانی و مکانی تعیین کنید
-
کاوش داده های رسم شده از طریق زوم، حرکت، چرخش، متحرک سازی
برای ارائه بهترین عملکرد، تمام ویژگی های گرافیکی باید قبل از استفاده از رابط کاربری گرافیکی پیش پردازش شوند.
دو مفهوم اصلی تجسم اجرا شده است: نمای سه بعدی و STC. نمودار سه بعدی اطلاعات ارتفاع را ارائه می دهد، در حالی که اطلاعات زمان وجود ندارد. مزیت STC این است که اطلاعاتی را ارائه می دهد که در طرح سه بعدی وجود ندارد. در طرح سه بعدی، زمانی که خوشه ها در زمان های مختلف در یک مکان رخ می دهند، ممکن است همپوشانی ایجاد شود. STC این مشکل را حل می کند و بینش گمشده را ارائه می دهد. در حالی که اطلاعات ارتفاع در STC وجود ندارد، ترکیب هر دو نمودار مکمل هستند و از طریق رابط کاربری تعاملی خود، اطلاعات مختلفی را در مورد دینامیک خوشه رعد و برق ارائه می دهند. با تغییر پرسپکتیو دید در STC، مشاهده از بالا (نمای 2 بعدی) همان نمای و اطلاعات نمودار دو بعدی سنتی را فعال می کند، همانطور که در شکل 1 نشان داده شده است.. رابط کاربری گرافیکی کاربر را قادر میسازد تا بین گزینههای تجسم مختلف برای ویژگیهای خوشه رعد و برق و مسیر خوشهای که در شکل 5 ، شکل 6 ، شکل 7 ، شکل 8 نشان داده شده است، ترکیب یا جابجا شود.
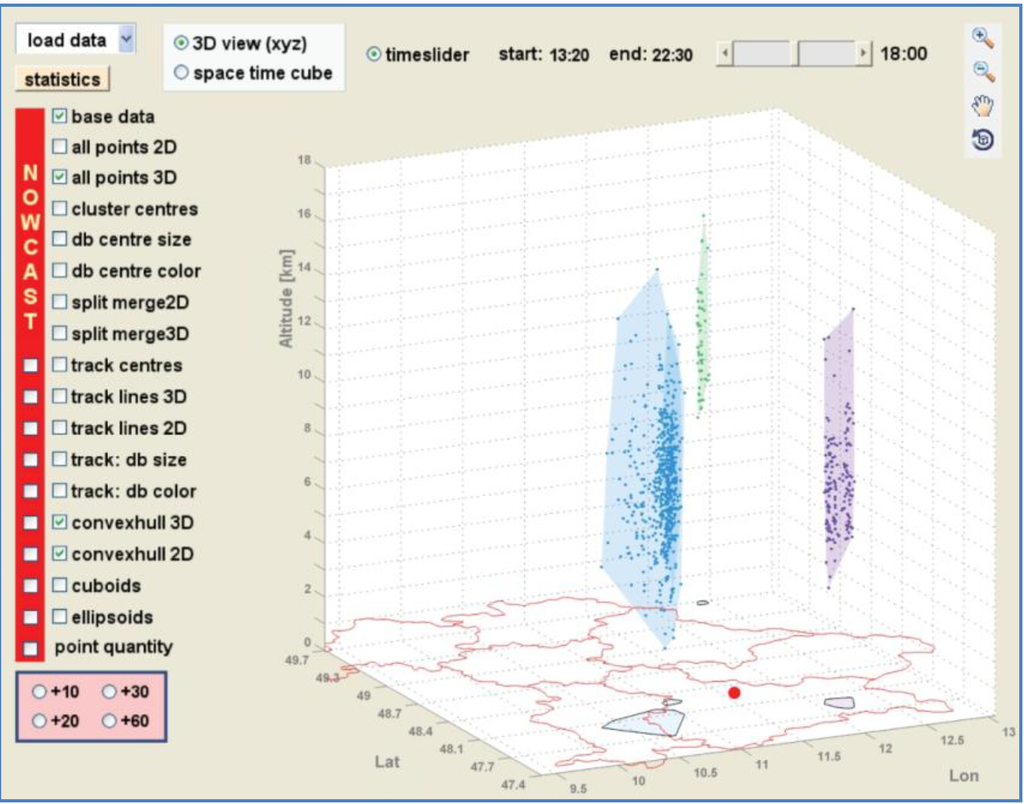
شکل 5. رابط کاربری گرافیکی لایتنینگ برای تجزیه و تحلیل اکتشافی داده های گذشته و پخش شده.
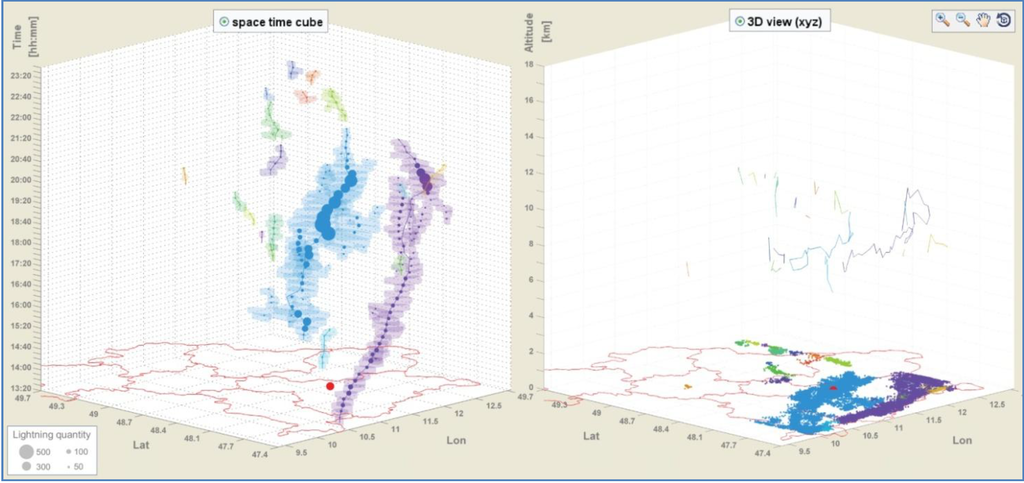
شکل 6. STC مسیرهای رعد و برق ( سمت چپ )، نمای 3 بعدی از مسیرهای رعد و برق ( راست ).
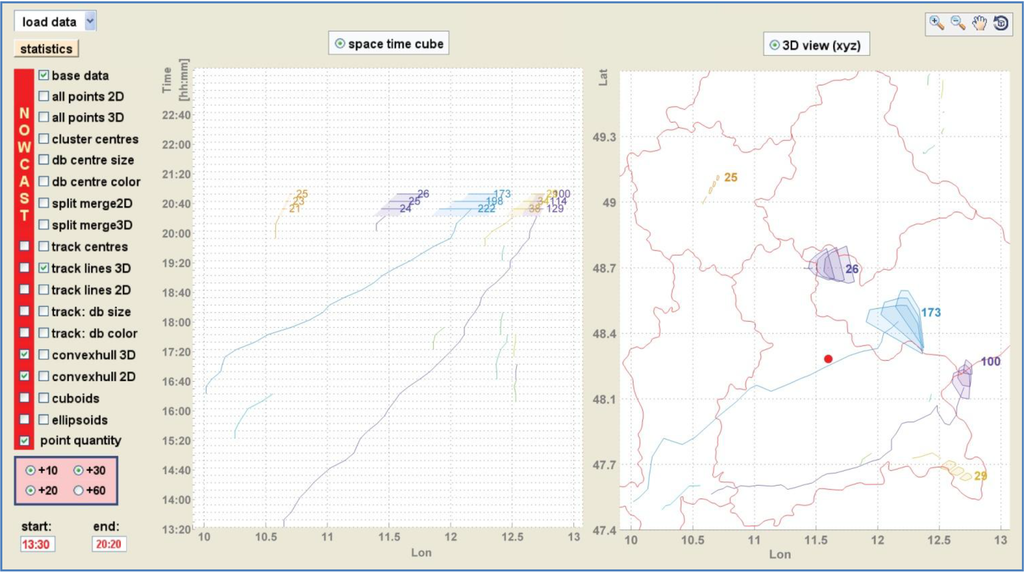
شکل 7. گرایش تغییر مقدار در ویژگی های خوشه پخش شده (بسط و چگالی).

شکل 8. بافر احتمال برای مرکزهای خوشه ای ریخته شده و بدنه های محدب خوشه ای.
4.4.2. تجزیه و تحلیل آماری ویژگی های خوشه رعد و برق دینامیک
علاوه بر این، برای تجزیه و تحلیل ویژگی های خوشه رعد و برق، داده های آماری به دست آمده از ردیابی/نواکستینگ خوشه پردازش شده ضروری است. جدول 4 تمام داده های آماری مهم خوشه ها و مسیرهای رعد و برق را فهرست می کند. این داده های آماری را می توان در رابط کاربری گرافیکی لایتنینگ گنجاند، بنابراین، داده های برجسته/انتخاب شده در حال حاضر (خوشه ها یا آهنگ ها) را می توان با کمک ابزارهای اضافی (مثلاً با استفاده از نمودارها) نشان داد و تجزیه و تحلیل کرد.
جدول 4. تجزیه و تحلیل آماری اطلاعات رعد و برق گذشته و پیش بینی شده.
5. نتایج و بحث
5.1. ردیابی خوشه رعد و برق و Nowcasting
حدود 65 درصد از مرکزهای خوشهای اکنون ریختهشده را میتوان با دقت (فاصله تا مکان بهروزشده) کمتر از 10 کیلومتر پیشبینی کرد. حدود 25 درصد از مرکزهای خوشه ای ریخته شده را می توان با دقت بین 10 تا 20 کیلومتر پیش بینی کرد. ویژگیهای خوشهای که اکنون پخش میشود، بر روش پیشبینی ویژگیهای خوشهای مبتنی بر قانون ما تأثیر دارد (همانطور که در بخش 4.3 توضیح داده شد ). از آنجایی که تنها داده های انباشته در مدل پیش بینی در نظر گرفته می شوند، زمان محاسبه پیش بینی در واقع بسیار سریعتر از در نظر گرفتن تمام نقاط اولیه است.
5.2. تجزیه و تحلیل بصری و آماری با استفاده از رابط کاربری گرافیکی Lightning
مفهوم تجسم تثبیت شده برای خوشههای رعد و برق پویا و ویژگیهای خوشهای گذشته و اکنون در یک رابط کاربری گرافیکی تعاملی پیادهسازی شد. چارچوب داده های مکانی و زمانی را می توان محدود کرد تا بر مناطق خاص مورد علاقه متمرکز شود. علاوه بر این، ابزارهای حرکت، زوم و چرخش، کشف تعاملی را فعال میکنند. با فعال کردن لغزنده زمان، فواصل زمانی خاص را می توان از طریق طرح ها یا انیمیشن ها بررسی کرد.
شکل 5 نمای کلی از تمام عملکردهای رابط کاربری گرافیکی پیاده سازی شده را ارائه می دهد. در سمت چپ، تمام ویژگیهای خوشهها و آهنگهای گذشته و اکنون پخششده را میتوان انتخاب کرد. پخش اکنون به مدت 10/20/30/60 دقیقه ارائه شده است. “دکمه آمار” تجزیه و تحلیل آماری را فعال می کند. برای تنظیمات فعلی داده های بارگذاری شده، می توان نمای سه بعدی یا STC را انتخاب کرد. استفاده از لغزنده زمان منجر به محدودیت محدوده زمانی می شود. در حال حاضر، نقاط رعد و برق و خوشه هایی که بین ساعت 5.50 بعد از ظهر تا 6 بعد از ظهر (در تاریخ 22.07.2010) رخ داده اند به صورت سه بعدی نشان داده شده اند. علاوه بر این، بدنههای محدب خوشهای بهصورت سهبعدی و همچنین دوبعدی نشان داده میشوند (تا ارتفاع صفر پیشبینی شده و با دادههای پایه نواحی بایرن بالایی و فرودگاه مونیخ – نقطه قرمز ترکیب میشوند).
مقایسه بصری مستقیم STC و 3D ممکن است، همانطور که در شکل 6 نشان داده شده است. تمام خوشه های اختصاص داده شده به یک مسیر با رنگ های نیمه شفاف متمایز می شوند. دو مسیر بزرگتر را می توان شناسایی کرد (ردهای خوشه ای بنفش و آبی). STC شامل پسوندها/حوزه های خوشه ای با بدنه های محدب سه بعدی نیمه شفاف است. علاوه بر این، خطوط مسیر و مرکز خوشهای با شعاع کروی ترسیم میشوند که مقدار/شدت هر نقطه خوشه را نشان میدهد. گزینه دیگر برای منعکس کردن چگالی نقاط خوشه، تعریف درخشندگی های مختلف چند ضلعی خوشه ای بسته به چگالی هر خوشه است. نمای سه بعدی شامل خطوط مسیر سه بعدی است و تمام نقاط رعد و برق دو بعدی بر اساس مسیر مرتبط رنگی می شوند.
در شکل 7 نیز، ویژگی های خوشه پخش شده نشان داده شده است. در سمت چپ، STC و در سمت راست نمای بالای زمین. خطوط مسیر تنها اطلاعات مربوط به تاریخچه خوشه هستند. البته می توان ویژگی های دیگری نیز به گرافیک اضافه کرد. زمان فعلی (“اکنون”) برای تجزیه و تحلیل Nowcast روی 8:20 بعد از ظهر تنظیم شده بود، که در آن زمان در مجموع پنج آهنگ خوشه وجود داشت. گسترش و تراکم خوشه برای 30 دقیقه بعدی (10+، 20+، 30+) پیشبینی شد. با استفاده از روش ما (شرح شده در بخش 4.1 ، بخش 4.2 ، بخش 4.3 ، سه مرحله زمانی پخش شده اکنون شامل یک گرایش ویژگی بر اساس سه مرحله زمانی آخر است. شکل 7به وضوح تغییر پسوندهای خوشه (بدنه های محدب) و شدت خوشه (تعداد پیش بینی شده نقاط رعد و برق) را نشان می دهد. گزینه دیگری برای تجسم شدت خوشه از طریق اندازه یا رنگ مرکز خوشه مبتنی بر چگالی است (به اختصار در GUI: “db center size/color”). به همین ترتیب، مقادیر بیشتر خوشه و مسیر آماری (مانند جدول 4 ) اکنون با توجه به تمایل ویژگی ارائه شده است. نمای STC روی یک پرسپکتیو جانبی تنظیم شده بود که از جنوب مشاهده می شد، اما می توان آن را با استفاده تعاملی از رابط کاربری گرافیکی (از طریق حرکت و چرخش) تغییر داد.
شکل 8 یک تصویر مثالی از مفهوم پیادهسازی شده برای تجسم قطعیت/احتمال ویژگیهای خوشهای پخششده ارائه میدهد. با استفاده از تنظیمات پیشبینی مشابه در شکل 7 ، نمودار STC در سمت چپ، مرکزهای خوشهای را نشان میدهد که توسط کرهها (بافرها) احاطه شدهاند که محدوده فضایی ممکن را برای مرکزهای پیشبینیشده منعکس میکنند. یک رنگ خاکستری نیمه شفاف برای بافر استفاده شد. نسبت بافر احتمال با مرحله زمانی آینده (8:20 بعد از ظهر +10، +20، +30 دقیقه) مرتبط است. علاوه بر این، داده های پایه جغرافیایی نشان داده شده است، و نقطه قرمز فرودگاه مونیخ را نشان می دهد. خط قرمز عمودی به وضوح نشان می دهد که چه زمانی و در چه غلظتی خوشه های رعد و برق در بالای فرودگاه قرار دارند. گنجاندن ویژگیهای بصری اضافی (به عنوان مثال، مقادیر خوشهای مانندشکل 7 )، از تجزیه و تحلیل خطرات احتمالی ناشی از رعد و برق پشتیبانی می کند. در سمت راست، بدنههای محدب خوشهای ریختهشده با بافرهای احتمالی فقط برای یک مرحله آینده (30 دقیقه) مشاهده میشوند. اندازه بافر با استفاده از مفهوم ارزیابی Nowcasting ما، همانطور که در بخش 4.3 توضیح داده شد، تعیین شد
رابط کاربری گرافیکی همچنین تجزیه و تحلیل آماری تعاملی داده های رعد و برق فعلی را امکان پذیر می کند. تمام مقادیر آماری ویژگی های خوشه و مسیر فهرست شده در جدول 4 ارائه شده است. حداکثر مقادیر برجسته شده است. علاوه بر این، ارزیابی های Nowcasting ارائه شده است.
شکل 9 پیشبینی ویژگی خوشهای تخمینی طولانیترین مسیر مجموعه دادههای آزمایشی را نشان میدهد. مساحت خوشه، تراکم، گسترش، ارتفاع و فاصله حرکت برای هر مرحله زمانی گذشته تعیین شد. محور X نشان دهنده زمان عمر خوشه است که از زمان = 0 شروع می شود، زمانی که خوشه برای اولین بار بوجود می آید تا زمانی که ناپدید شود. برای این مثال، واضح است که سطح خوشه و چگالی با یکدیگر همبستگی مثبت دارند.
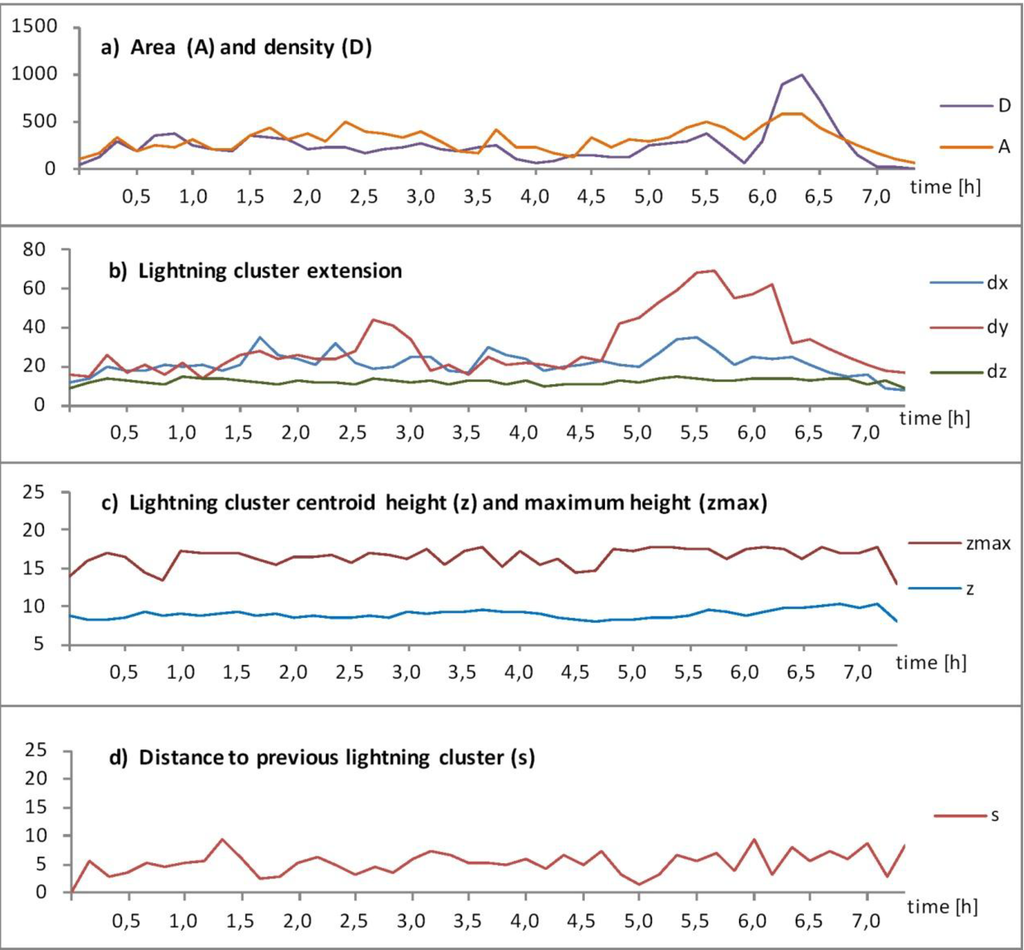
شکل 9. ویژگی های تخمینی خوشه رعد و برق یک مسیر نمونه در تمام طول عمر آن: ( الف ) مساحت خوشه A در (km2 ) و چگالی D. ( ب ) پسوند فضایی سه بعدی خوشه ای dx , dy , dz در (km)؛ ( ج ) ارتفاع مرکز خوشه z و حداکثر ارتفاع zmax در (کیلومتر)؛ ( د ) فاصله خوشه تا خوشه قبلی در (کیلومتر).
6. نتیجه گیری و چشم انداز
این کار یک چارچوب تعاملی برای تجزیه و تحلیل بصری و آماری دادههای رعد و برق ردیابی و پخششده ارائه کرده است. یک گردش کار ارائه شد که شامل شناسایی، ردیابی و پخش کنونی خوشه رعد و برق بود. به طور خاص، یک رابط کاربری گرافیکی تعاملی به منظور پشتیبانی از بررسی پویایی خوشه رعد و برق و ویژگیهای مسیر توسعه داده شد. مجموعه گسترده ای از روش های تحقیق بصری (به عنوان مثال، نمای سه بعدی، فضا-زمان-مکعب، ابزار لغزنده زمان، ابزار Nowcast) یکپارچه و اجرا شد. علاوه بر این، تجزیه و تحلیل داده های رعد و برق آماری همراه با مفهومی برای تعیین و ارائه بصری عدم قطعیت پیش بینی خوشه رعد و برق ارائه شد. توسعه بیشتر ایده پیش بینی به درک اهمیت این کار کمک می کند.
رابط کاربری گرافیکی لایتنینگ ما مجموعه ای از عملکردها را برای فعال کردن تجزیه و تحلیل بصری تعاملی داده ها و به ویژه تغییر آنها در زمان و مکان فراهم می کند. بنابراین، کاربران می توانند خوشه رعد و برق را کاوش کنند و ویژگی ها – تاریخچه و تکامل آنها را دنبال کنند. همراه با اطلاعات آماری ممکن است از تصمیم گیری در مواردی که صاعقه یک خطر بالقوه است پشتیبانی کند، به عنوان مثال در پیش بینی یا برنامه ریزی پرواز.
با توجه به هواشناسی، کار پیشنهادی را می توان به سمت دو ماژول گسترش داد: (1) تجسم رعد و برق و (2) رعد و برق در حال پخش. برای این ماژول ها، اطلاعات همگام سازی شده در زمان واقعی از رادار، تصاویر ماهواره ای و داده های رعد و برق باید در نظر گرفته شود. گنجاندن چنین دادههایی میتواند منجر به پیشبینی و ارزیابی بهتر سلولهای رعد و برق پخششده شود. به طور خاص، ابرهایی با پتانسیل فعالیت های رعد و برق آتی را می توان در مدل شناسایی و در نظر گرفت.
هدف ما پیشنهاد کامل تکنیک های تجسم جدید نبود. در عوض، امکانسنجی روشهای تجسم موجود برای سناریوهای داده جدید و ادغام آنها در یک سیستم کاربر پسند را بررسی کردیم. رویکرد ما پتانسیل تجزیه و تحلیل بصری تعاملی را با استفاده از یک مجموعه داده نمونه (نقاط رعد و برق)، که برای هدف خاصی انتخاب نشده بود، نشان داد. برای کارهای آینده، ارزیابی روش های پیشنهادی بر عهده ماست. بهویژه، آزمایشهایی با کارشناسان لایتنینگ و افراد غیر روحانی علاقهمند، احتمالاً در یک محیط جمعسپاری، برای تأیید و بهبود قابلیت استفاده از رابط کاربری گرافیکی اجرا میشود. علاوه بر این، ما در حال بررسی تبدیل رابط کاربری گرافیکی به یک برنامه وب هستیم. در انجام این کار، ما می خواهیم کاربران را فعال کنیم (به عنوان مثال، کارشناسان رعد و برق) برای آپلود داده های خود (داده های نقطه رعد و برق حاوی اطلاعات زمان) و به صورت تعاملی پویایی خوشه را با ارائه نمایش های بصری مختلف تجزیه و تحلیل می کنند. یک چالش اصلی ارائه عملکرد کاربر پسند در وظیفه پردازش وب مورد نیاز خواهد بود. همچنین برنامه ریزی شده است که یک شبکه بیزی برای یادگیری پارامترهای پیش بینی راه اندازی شود.
منابع
- تعمیم اطلاعات جغرافیایی: مدلسازی نقشه کشی و کاربردها ; Mackaness، WA; رواس، ع. Sarjakoski، LT (Eds.) Elsevier: Amsterdam, The Netherlands, 2007; پ. 386.
- آندرینکو، جی. آندرینکو، ن. دایکز، جی. فابریکانت، SI; Wachowicz، M. Geovisualization از دینامیک، حرکت و تغییر: مسائل کلیدی و رویکردهای در حال توسعه در تحقیقات تجسم. Inf. Vis. 2008 ، 7 ، 173-180. [ Google Scholar ] [ CrossRef ]
- کیم، دی. آندرینکو، جی. Fekete، J.-D. گورگ، سی. کوههامر، جی. Melançon, G. Visual Analytics: Definition, Process, and Challenges. در تجسم اطلاعات: مسائل و دیدگاه های انسان محور . Springer: برلین، آلمان، 2008. [ Google Scholar ]
- Turk, A. طراحی تجسمهای پیشرفته GIS با استفاده از نظریهها، مدلها و رویههای ارگونومی شناختی. در مجموعه شانزدهمین کنفرانس بین المللی کارتوگرافی، کلن، آلمان، 3 تا 9 مه 1993.
- کریسپ، جی.ام. پیترز، اس. مورفی، م. فن، H. انتخاب پهنای باند بصری برای نقشه های چگالی هسته. فتوگرامتری Fernerkundung Geoinf. 2009 ، 2009 ، 445-454. [ Google Scholar ] [ CrossRef ]
- کریسپ، جی.ام. Peters, S. Visualizing Dynamic 3D Densities: A Lava-Lamp Approach. در مجموعه سیزدهمین کنفرانس بین المللی AGILE در علم اطلاعات جغرافیایی، گیمارش، پرتغال، 10-14 مه 2010.
- risp، JM; پیترز، اس. بورکرت، اف. بوتنوت، ام. شناسایی بصری الگوهای حرکت جمعیت پراکنده با استفاده از تخمین تراکم هسته هدایت شده. در مجموعه مقالات SPM2010 Mobile Tartu، تارتو، استونی، 26-28 اوت 2010.
- پیترز، اس. Krisp، JM محاسبه چگالی برای نقاط متحرک. در مجموعه سیزدهمین کنفرانس بین المللی AGILE در علم اطلاعات جغرافیایی، گیمارش، پرتغال، 10-14 مه 2010.
- پیترز، S. رویکرد مبتنی بر چهار درخت و هشت درخت برای انتخاب داده های نقطه ای در دو بعدی یا سه بعدی. ان GIS 2013 ، 19 ، 37-44. [ Google Scholar ] [ CrossRef ]
- کریسپ، جی.ام. پیترز، اس. برآورد تراکم هسته (DKDE) برای تجسم سری های زمانی. ان GIS 2011 ، 17 ، 155-162. [ Google Scholar ] [ CrossRef ]
- Kraak، MJ مکعب فضا-زمان بازبینی شده از دیدگاه ژئوتصویرسازی. در مجموعه بیست و یکمین کنفرانس بین المللی کارتوگرافی، دوربان، آفریقای جنوبی، 10-16 اوت 2003. صفحات 1988-1996.
- آندرینکو، ن. آندرینکو، جی. تحلیل اکتشافی دادههای مکانی و زمانی . Springer: برلین، آلمان، 2006. [ Google Scholar ]
- آندرینکو، ن. آندرینکو، جی. چارچوب تجزیه و تحلیل بصری برای تحلیل و مدلسازی مکانی-زمانی. حداقل داده بدانید. کشف کنید. 2012 ، 27 ، 55-83. [ Google Scholar ]
- آندرینکو، جی. آندرینکو، ن. کیم، دی. MacEachren، AM; Wrobel, S. مشکلات چالش برانگیز تجزیه و تحلیل بصری جغرافیایی. J. Vis. لنگ محاسبه کنید. 2011 ، 22 ، 251-256. [ Google Scholar ] [ CrossRef ]
- آندرینکو، جی. آندرینکو، ن. یانکوفسکی، پ. کیم، دی. کراک، ام.-جی. MacEachren، A.; Wrobel, S. تجزیه و تحلیل جغرافیایی برای پشتیبانی تصمیم گیری فضایی: تنظیم دستور کار تحقیق. بین المللی جی. جئوگر. Inf. علمی 2007 ، 21 ، 839-857. [ Google Scholar ] [ CrossRef ]
- آندرینکو، جی. آندرینکو، ن. دمسار، U. درانش، دی. دایکز، جی. فابریکانت، SI; جرن، ام. کراک، ام.-جی. شومان، اچ. تومینسکی، سی. تحلیل فضا، زمان و بصری. بین المللی جی. جئوگر. Inf. علمی 2010 ، 24 ، 1577-1600. [ Google Scholar ] [ CrossRef ]
- NVAC PNNL: تجسم اطلاعات و تجزیه و تحلیل بصری . در دسترس آنلاین: http://vis.pnnl.gov/ (در 21 اوت 2013 قابل دسترسی است).
- VisMaster VisMaster»Visual Analytics—تسلط بر عصر اطلاعات . در دسترس آنلاین: http://www.vismaster.eu/ (در 21 اوت 2013 قابل دسترسی است).
- MOVE MOVE—WG 4: تجزیه و تحلیل بصری برای مسائل حرکتی و شناختی . در دسترس آنلاین: http://www.move-cost.info/ (در 21 اوت 2013 قابل دسترسی است).
- MacEachren، AM; کراک، امجی چالشهای پژوهشی در تجسم جغرافیایی. کارتوگر. Geogr. Inf. علمی 2001 ، 28 ، 3-12. [ Google Scholar ] [ CrossRef ]
- ویرانتاوس، ک. فیربرین، دی. کراک، ام.-جی. دستور کار تحقیقاتی ICA در مورد نقشه برداری و علم GI. کارتوگر. J. 2009 ، 46 ، 63-75. [ Google Scholar ] [ CrossRef ]
- کوک، ک. گرینشتاین، جی. وایتینگ، ام. کوپر، ام. هاویگ، پی. لیگت، ک. نبش، ب. Paul, CL VAST Challenge 2012: Visual Analytics for Big Data. در مجموعه مقالات کنفرانس IEEE 2012 در علم و فناوری تجزیه و تحلیل بصری (VAST)، سیاتل، WA، ایالات متحده آمریکا، 14-19 اکتبر 2012. صص 251-255.
- کریسپ، جی.ام. پیترز، اس. پولوس، ک. فن، اچ. منگ، ال. ورود و خروج از تاکسی: تجزیه و تحلیل نقطه اتصال مکانی-زمانی برای دادههای تاکسی شناور در شانگهای. در مجموعه مقالات شبکه ها برای تحرک 2012، اشتوتگارت، آلمان، 27-28 سپتامبر 2012.
- کیتاگاوا، ن. بروک، ام. Workman, E. جریانهای مداوم در تخلیه صاعقه ابر به زمین. جی. ژئوفیس. Res. 1962 ، 67 ، 637-647. [ Google Scholar ] [ CrossRef ]
- Betz، HD; اشمیت، ک. اوتینگر، WP LINET – یک شبکه بین المللی تشخیص صاعقه VLF/LF در اروپا. در رعد و برق: اصول، ابزار و کاربردها . Betz, HD, Schumann, U., Laroche, P., Eds. Springer: Holland، هلند، 2009; صص 115-140. [ Google Scholar ]
- Betz، HD; اشمیت، ک. اوتینگر، WP; Montag، B. ردیابی سلول با داده های رعد و برق از LINET. Adv. Geosci. 2008 ، 17 ، 55-61. [ Google Scholar ] [ CrossRef ]
- پیترز، اس. منگ، ال. Betz، تجزیه و تحلیل تصویری HD داده های رعد و برق با استفاده از مکعب فضا-زمان. در مجموعه بیست و ششمین کنفرانس بین المللی کارتوگرافی (ICC)، درسدن، آلمان، 25 تا 30 اوت 2013. در مطبوعات.
- WMO Nowcasting در دسترس آنلاین: http://www.wmo.int/pages/prog/amp/pwsp/Nowcasting.htm (در 21 آگوست 2013 قابل دسترسی است).
- گالتون، الف. جمع های پویا و پویایی جمعی آنها. تف کردن Inf. نظریه 2005 ، 3693 ، 300-315. [ Google Scholar ]
- Meyer, V. ردیابی و پایش رعد و برق بر اساس داده های رعد و برق سه بعدی و داده های رادار متعارف و قطبی. دکتری پایان نامه، لودویگ-ماکسیمیلیان-دانشگاه مونیخ، مونیخ، آلمان، 2010. [ Google Scholar ]
- لی، ال. اشمید، دبلیو. Joss, J. Nowcasting از حرکت و رشد بارش با رادار بر روی یک کوه نگاری پیچیده. J. Appl. هواشناسی 1995 ، 34 ، 1286-1300. [ Google Scholar ] [ CrossRef ]
- جانسون، جی. MacKeen، PL; ویت، ا. میچل، EDW; Stumpf، GJ; Eilts، MD; توماس، KW الگوریتم شناسایی و ردیابی سلول طوفانی: یک الگوریتم پیشرفته WSR-88D. پیش بینی آب و هوا. 1998 ، 13 ، 263-276. [ Google Scholar ] [ CrossRef ]
- راینهارت، آر. Garvey, E. تشخیص حرکت طوفان سه بعدی توسط رادار هواشناسی معمولی. طبیعت 1978 . [ Google Scholar ] [ CrossRef ]
- زینر، تی. مانشتاین، اچ. Tafferner، A. Cb-TRAM: ردیابی و نظارت بر همرفت شدید از شروع بیش از توسعه سریع تا فاز بالغ با استفاده از داده های چند کاناله Meteosat-8 SEVIRI. هواشناسی اتمس. فیزیک 2008 ، 101 ، 191-210. [ Google Scholar ] [ CrossRef ]
- دیکسون، ام. وینر، G. TITAN: شناسایی، ردیابی، تجزیه و تحلیل و پخش مستقیم طوفان رعد و برق – روشی مبتنی بر رادار. J. Atmos. اقیانوس. تکنولوژی 1993 ، 10 ، 785-797. [ Google Scholar ] [ CrossRef ]
- Handwerker، J. ردیابی سلول با TRACE3D – یک الگوریتم جدید. اتمس. Res. 2002 ، 61 ، 15-34. [ Google Scholar ] [ CrossRef ]
- هرینگ، ا. مورل، سی. گالی، جی. سنسی، اس. آمبروستی، پ. بوسکاچی، ام. طوفانهای تندری در نواحی آلپ با استفاده از طرح آستانهسازی تطبیقی مبتنی بر رادار. در مجموعه مقالات سومین کنفرانس ERAD، ویسبی، سوئد، 6-10 سپتامبر 2004. ص 206-211.
- استیناکر، آر. دورنینگر، ام. وولفلمایر، اف. Krennert، T. ردیابی خودکار سلولهای همرفتی و مجتمعهای سلولی از دادههای رعد و برق و رادار. هواشناسی اتمس. فیزیک 2000 ، 72 ، 101-110. [ Google Scholar ] [ CrossRef ]
- بونلی، پ. Marcacci, P. رعد و برق در حال پخش با استفاده از داده های رعد و برق و رادار: الگوریتم ها و برنامه های کاربردی در شمال ایتالیا. نات. سیستم خطرات زمین. علمی 2008 ، 8 ، 1187-1198. [ Google Scholar ] [ CrossRef ]
- بولیگر، ام. بایندر، پ. Rossa, A. ردیابی الگوهای ابر با تصاویر اسکن سریع در منطقه آلپ. در مجموعه مقالات دهمین کنفرانس AMS در مورد هواشناسی کوهستانی، پارک سیتی، UT، ایالات متحده آمریکا، 17-21 ژوئن 2002. جلد 12، ص 73–80.
- جین، AK; Dubes، الگوریتمهای RC برای خوشهبندی دادهها . Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1988. [ Google Scholar ]
- هان، جی. کامبر، ام. داده کاوی: مفاهیم و تکنیک ها . مورگان کافمن: سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 2006. [ Google Scholar ]
- روح، ک. آرچیبالد، ای. هارداکر، پی. Hounsell, A. استفاده از سیستم GANDOLF به عنوان ابزاری برای کمک به پیشبینی صاعقه. هواشناسی Appl. 2002 ، 9 ، 229-238. [ Google Scholar ] [ CrossRef ]
- یونگ، LH; لای، ES; Chiu، SK رعد و برق و شدت جریان بر اساس بازتاب رادار همدما – یک مدل مفهومی. در مجموعه سی و سومین کنفرانس بین المللی هواشناسی رادار، کایرنز، QLD، استرالیا، 6 تا 10 اوت 2007. صص 6-10.
- توردوکلوف، UD; کراک، ام.-جی. Blok، CA طراحی یک محیط بصری برای کاوش سری های زمانی داده های سنجش از راه دور: در جستجوی ابرهای همرفتی. محاسبه کنید. نمودار. 2007 ، 31 ، 370-379. [ Google Scholar ] [ CrossRef ]
- جین، AK; مورتی، MN; Flynn، PJ خوشه بندی داده ها: یک بررسی. کامپیوتر ACM. Surv. (CSUR) 1999 ، 31 ، 264-323. [ Google Scholar ] [ CrossRef ]
- Bertin, J. Semiology of Graphics: Diagrams, Networks, Maps ; انتشارات دانشگاه ویسکانسین: مدیسون، WI، ایالات متحده آمریکا، 1983. [ Google Scholar ]
© 2013 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/3.0/) توزیع شده است.
بدون نظر