1. معرفی
فشار آب، دما، شرایط زمین شناسی، کیفیت ساخت و ساز و سایر عوامل آسیب های ساختاری به سدها وارد می کند و زندگی مردم ساکن در مناطق اطراف را تهدید می کند. نظارت بر تغییر شکل سد و پردازش دادههای آن روشهای مؤثری برای ارزیابی ایمنی سد و جلوگیری از شکستهای احتمالی سد است [ 1 ]. فیلتر کالمن، یک روش پردازش داده موثر برای سیستم های پویا، به طور گسترده در پردازش داده های نظارت بر تغییر شکل استفاده شده است [ 2 ، 3 ]، و روش های فیلتر کالمن بهبود یافته، مانند فیلتر کالمن برای نویز اندازه گیری رنگی و فیلتر قوی Kalman، استفاده شده است. توسعه یافته برای تجزیه و تحلیل داده های تغییر شکل [ 4 ، 5 ، 6]. با این حال، همه این برنامهها بر اساس سری دادههای مانیتورینگ نقطهای هستند، بدون در نظر گرفتن همبستگی فضایی بین نقاط نظارت. بنابراین به نوعی، نه فیلترهای استاندارد و نه بهبودیافته کالمن برای تجزیه و تحلیل دادههای تغییر شکل سد، که باید به عنوان یک بدنه تغییر شکل کامل در نظر گرفته شود، مناسب نیستند [ 7 ، 8 ]. علاوه بر این، با توسعه فناوریهای مدرن نظارت بر تغییر شکل، مانند رادار دیافراگم مصنوعی تداخلسنجی (InSAR)، دادههای تغییر شکل مشاهدهشده میتوانند ویژگیهای مکانی-زمانی بیشتری از اجسام تغییر شکل ارائه دهند. به این ترتیب، ضروری است که روشهای جدید تجزیه و تحلیل دادهها برای پردازش دادههای تغییر شکل همه مکانهای نظارت به عنوان یک بدنه تغییر شکل کامل در هر دو حوزه مکانی و زمانی توسعه داده شوند.
فیلتر فضا-زمان کالمن (STKF)، پیشنهاد شده در دهه 1990 [ 9 ، 10 ، 11 ، 12 ]، یک روش پردازش داده های مکانی-زمانی است که فیلتر کالمن و مدل های زمین آمار را ترکیب می کند. مدل زمین آماری که معمولاً مورد استفاده قرار می گیرد، مدل کریجینگ است، بنابراین STKF فیلتر کریگد کالمن (KKF) نیز نامیده می شود [ 12 ]. برای غلبه بر مشکلات ناشی از مجموعه دادههای بزرگ و مدلسازی تعاملات مکانی-زمانی در KKF، یک STKF کاهشیافته توسعه داده شد [ 13 ، 14 ]. فیلتر کریگد کالمن توزیع شده (DKKF) [ 15 ] و فیلتر کالمن کریگد بیزی (BKKF) [ 16 ، 17 ، 18] بعداً پیشنهاد شد. کاربردهای فعلی STKF عمدتاً بر روی مسائل زیست محیطی تمرکز دارد. مردیا و همکاران (1998) از KKF در برخورد با توزیع دی اکسید گوگرد در لیدز استفاده کرد [ 12 ]. ویکل و همکاران (1999) مدل STKF را با مجموعه داده ای از بادهای استوایی نزدیک به سطح [ 13 ] تایید کرد. ساهو و همکاران (2005) از STKF برای مدل سازی توزیع ذرات اتمسفر در نیویورک در ایالات متحده استفاده کرد و یک پیش بینی کوتاه مدت انجام داد [ 16 ]. لاسینیو و همکاران (2005) یک مدل بارندگی مکانی-زمانی را ایجاد کرد که شامل فصلی بودن و متغیرهای کمکی مبتنی بر BKKF [ 17 ] است. العوضی و همکاران (2012) از رگرسیون و BKKF برای پیش بینی میانگین غلظت ساعتی هیدروکربن های غیر متان در مناطق نظارت نشده کویت استفاده کرد [ 18]]. کینگ و همکاران (2012) BKKF را برای پیشبینی کوتاهمدت سرعت باد اتخاذ کرد [ 19 ]. با این حال، STKF به ندرت در تجزیه و تحلیل داده های تغییر شکل استفاده می شود. به این ترتیب، این مقاله STKF را به تجزیه و تحلیل تغییر شکل سد میآورد.
در این مقاله ابتدا مدل ریاضی STKF را معرفی می کنیم. سپس روشها و الگوریتمهای تعیین میدانهای فضایی کریجینگ و پارامترهای STKF برای تجزیه و تحلیل دادههای تغییر شکل سد به تفصیل ارائه میشوند. سپس، ما یک مدل STKF را برای فیلتر کردن نویز اعمال میکنیم، دادههای تغییر شکل کل سد را در حوزههای مکانی و زمانی درونیابی کرده و یک پیشبینی کوتاهمدت انجام میدهیم. در نهایت، آزمایشهایی با دادههای شبیهسازی و دادههای پایش جابجایی افقی سد واقعی برای تأیید مدل STKF انجام میشود.
2. مدل فیلتر کالمن فضا-زمان
در این بخش، مدل ریاضی STKF در بخش 2.1 معرفی شده است . بخش 2.2 نحوه ساخت میدان های فضایی STKF را با استفاده از مدل کریجینگ نشان می دهد. در بخش 2.3 ، به طور مختصر در مورد الگوریتم حداکثرسازی انتظارات (الگوریتم EM) برای تخمین پارامتر بحث می کنیم. در بخش آخر به بررسی مراحل بازگشت فیلتر کالمن و روش های درونیابی و پیش بینی تغییر شکل در فضا و زمان می پردازیم.
2.1. مدل ریاضی
با توجه به نقاط مکان { s =س1،س2, … ,سn}{s=s1,s2,…,s�}و نقاط زمانی { t = 1 ، 2 ، … ، m }{�=1,2,…,�}، ارزش مشاهده ای Lتی( ها )��(s)را می توان به اجزای خطای میانگین و مشاهده شده [ 14 ] تجزیه کرد:
جایی که εتی( ها )��(s)مولفه های خطای مشاهده شده است و Yتی( ها )��(s)جزء متوسط است. Yتی( ها )��(s)را می توان به عنوان یک ترکیب خطی متغیر با زمان بیان کرد α ( t ) ( ص × 1 )�(�) (�×1)از میدان های فضایی h ( s ) ( p × 1 ) ℎ(�) (�×1)[ 12 ]، که می تواند به صورت نوشته شود
جایی که ( ∗ )تی(∗)�عملگر انتقال و بردار است α ( t )�(�)دولت برای است Yتی( ها )��(�)، که مؤلفه های زمان پویا را نشان می دهد. به طور کلی، p ≪ n�≪�، بنابراین تعداد پ�کلید کاهش ابعاد حوزه فضایی است.
نوشتن اچ= [ ساعت(س1)تی; ساعت(س2)تی; … _ ساعت(سn)تی]�=[ℎ(s1)�;ℎ(s2)�;…;ℎ(s�)�]، Lتی=[Lتی(س1) ،Lتی(س2) ، … _Lتی(سn) ]تی�تی=[�تی(س1)،�تی(س2)،…،�تی(س�)]تی، و εتی=[εتی(س1) ،εتی(س2) ، … _εتی(سn) ]تی�تی=[�تی(س1)،�تی(س2)،…،�تی(س�)]تی، جایگزینی (2) به (1) معادله مشاهده (3) STKF را به دست می دهد.
معادله حالت را می توان با نشان داد
جایی که Φ�ماتریس انتقال حالت است، η ( t )�(�)خطای سیستم در زمان است تیتی. فرض کنید εتی~ N ( 0 ,Σε)�تی~ن(0،��)، η ( t ) ~ N ( 0 ,Ση)�(تی)~ن(0،��)، جایی که N ( ∗ ، ∗ )ن(∗،∗)عملگر توزیع عادی است، Σε��کوواریانس نویز مشاهده ای است و Ση��کوواریانس نویز سیستم است.
معادلات (3) و (4) مدل STKF را تشکیل می دهند. با توجه به مدل، ماتریس ها اچ, Φ ,Σε،Σηاچ،�،��،��و حالت اولیه α ( 0 ) ~ N(آˆ0 | 0،پ0 | 0)�(0)~ن(آ^0|0،پ0|0)برای پیاده سازی بازگشت STKF ضروری هستند. میدان های فضایی اچاچتوسط میدانهای کریجینگ فضایی ساخته میشوند که کلیدی برای در نظر گرفتن همبستگی فضایی است. پارامتر θ = {آˆ0 | 0،پ0 | 0, Φ ,Σε،Ση}�={آ^0|0،پ0|0،�،��،��}می توان با الگوریتم EM تخمین زد. در قسمت های بعدی روش بدست آوردن این ماتریس ها را به تفصیل ارائه خواهیم داد.
2.2. میدان های فضایی اچاچ
میدان های فضایی اچاچتوسط مدل کریجینگ فضایی ساخته شده اند. در نقطه زمانی تیتیمدل جهانی کریجینگ به شرح زیر است:
جایی که f( ها ) =[f1( ها ) ،f2( ها ) ، ..fq( ها ) ]تی�(س)=[�1(س)،�2(س)،..��(س)]تیفیلدهای روند فضایی داده شده است که عناصر آن تابعی از مختصات هستند سس. فیلدهای روند فضایی رایج، روندهای ثابت، خطی و درجه دوم هستند. زیرنویس q�توسط روند انتخاب شده تعیین می شود. βتی�تیضریب است f( ها )�(س)، و ςتی( ها )�تی(س)تغییر فضای محلی پس از حذف روند فضایی است. فرض ςتی( ها )�تی(س)ثابت است و می توان آن را با مدل کوواریانس فضایی (یا نیمه واریوگرام) توصیف کرد [ 14 ، 16 ]. یک مدل نیمه واریوگرام تجربی را می توان از مشاهدات برای توصیف به دست آورد ςتی( ها )�تی(س). ابتدا داده های detrended را محاسبه کنید Dتی�تیدر نقطه زمانی تیتیبا حداقل مربعات معمولی،
جایی که ( ∗ )– 1(∗)–1عملگر معکوس است، Dتی=[Dتی(س1) ،Dتی(س2) ، … _Dتی(سn) ]تی�تی=[�تی(س1)،�تی(س2)،…،�تی(س�)]تی، Yتی=[Yتی(س1) ،Yتی(س2) ، … _Yتی(سn) ]تی�تی=[�تی(س1)،�تی(س2)،…،�تی(س�)]تی، و اف= [ f(س1)تی; f(س2)تی; … _ f(سn)تی]اف=[�(س1)تی;�(س2)تی;…;�(س�)تی]ماتریس روند انتخابی است. در اینجا، با فرض افافبا گذشت زمان تغییر نمی کند، نیمه واریوگرام تجربی را می توان با نیمه واریوگرام متوسط تخمین زد،
جایی که ∑∗∗( ∗ )∑∗∗(∗)عملگر جمع است. یک مدل نیمه واریوگرام متناسب با آن انتخاب کنید γˆ( د)�^(د)، و کوواریانس فضایی را می توان به دست آورد σς(سمن،سj) =سی–γˆ( ∥سمن–سj∥ )��(سمن،س�)=سی–�^(“سمن–س�“)، جایی که سیسیمقدار آستانه مدل نیمه واریوگرام است و ∥ ∗ ∥“∗“اپراتور فاصله است.
پس از انتخاب فیلدهای روند فضا و تثبیت تابع نیمه واریوگرام، پیش بینی کننده کریجینگ را می توان به صورت زیر نوشت [ 20 ، 21 ]:
جایی که σς( ها ) =[σς( s _س1) ،σς( s _س2) ، … _σς( s _سn) ]تی��(س)=[��(س،س1)،��(س،س2)،…،��(س،س�)]تی. ماتریس ها آآو ببشکل ثابت را داشته باشید
جایی که Σς��یک ماتریس کوواریانس فضایی با (Σς)من ج=σς(سمن،سj)(��)من�=��(سمن،س�)، و بببه عنوان ماتریس انرژی خمشی [ 12 ، 22 ] شناخته می شود، که برای توصیف مقیاس تغییرات فضای محلی پس از حذف روند فضا استفاده می شود. برای کاهش ابعاد، تجزیه طیفی ماتریس را در نظر بگیرید بب،
که در آن ستون های U= [تو1،تو2, … ,توn]�=[تو1،تو2،…،تو�]بردارهای ویژه هستند بب، و عناصر مورب از D = دیگ (د1،د2، .. ،دn)�=دیگ(د1،د2،..،د�)مقادیر ویژه متناظر هستند و دیاگ ( ∗ )دیگ(∗)عملگر ماتریس مورب است. تأیید آن آسان است B F= 0باف=0، که به معنی ستون های افافرا می توان به عنوان بردارهای ویژه در نظر گرفت بببا مقادیر ویژه صفر مربوطه د1،د2، .. ،دqد1،د2،..،د�. بدیهی است که مقادیر ویژه کوچکتر تغییرات فضایی در مقیاس بزرگتر را نشان می دهد، در حالی که مقادیر ویژه بزرگتر تغییرات فضایی محلی را توصیف می کند [ 16 ].
بردارهای ویژه تومنتومنمجموعه ای از پایه متعامد را تشکیل می دهند، بنابراین بردار میانگین Yتی�تیرا می توان به صورت ترکیبی خطی از بردارهای ویژه نشان داد تومنتومن. در واقع، فرض کنید که Yتی=∑ni = 1جمن ، تی تومن، β^تی= AYتی�تی=∑من=1�جمن،تی تومن، �^تی=آ�تیو معادله (8) را می توان به صورت بازنویسی کرد
جایی که جتی=[جq+ 1 ، t، .. ،جn ، t]تیجتی=[ج�+1،تی،..،ج�،تی]تی. اگر n�بسیار بزرگ است، ما فقط اولی را می گیریم پپتغییرات فضا برای کاهش ابعاد، که منجر به میدان های فضایی به شکل کاهش ابعاد می شود (13). پارامتر پپمی توان به دست آورد در حالی که نسبت e =∑پi = 1دمن/∑ni = 1دمنه=∑من=1پدمن∕∑من=1�دمناز درصد معینی فراتر می رود (معمولاً 90٪ یا 95٪) [ 18 ]، که نسبتی را که تغییرات فضایی انتخاب شده در کل تغییرات فضایی می گیرند، توضیح می دهد.
شایان ذکر است که ساعتمن( ها ) =fمن( ها )ساعتمن(س)=�من(س)زمینه روند مورد استفاده برای توصیف روند جهانی است. ساعتj( ها ) =دjσς( ها )تیتوjساعت�(س)=د���(س)تیتو�میدان اصلی مورد استفاده برای درک تغییرات فضایی محلی است. اگر میدان اصلی را نادیده بگیرد، STKF به یک مدل سطح روند مکانی-زمانی [ 16 ] کاهش مییابد، و اگر به طور مداوم استفاده شود ساعتمن( ها ) =fمن( s ) = 1ساعتمن(س)=�من(س)=1، STKF به یک مدل کالمن استاندارد کاهش می یابد. همچنین، اگر فقط معادله مشاهده STKF را در نظر بگیریم، STKF به یک مدل جهانی کریجینگ کاهش می یابد.
2.3. تخمین پارامترها
برآورد حداکثر درستنمایی (MLE) یک روش موثر برای تخمین پارامتر است θ = {آˆ0 | 0،پ0 | 0, Φ ,Σε،Ση}�={آ^0|0،پ0|0،�،��،��}. با این حال، از لگاریتم تابع درستنمایی مشترک (14)، نمی توانیم مستقیماً لگاریتم تابع درستنمایی مشترک را به حداکثر برسانیم. ورود به سیستم ( l )ورود به سیستم(ل)به دلیل توزیع ناشناخته بردار حالت α ( t )�(تی).
جایی که | ∗ ||∗|عملگر تعیین کننده است و ورود به سیستم ( ∗ )ورود به سیستم(∗)عملگر لگاریتمی است.
الگوریتم EM یک روش تکراری برای به حداکثر رساندن ارائه می دهد ورود به سیستم ( l )ورود به سیستم(ل)، که از مرحله انتظار (گام E) و مرحله حداکثرسازی (گام M) تشکیل شده است [ 23 ]. فرض کنید آن را در ( r + 1 ) t h(�+1)تیساعتتکرار، سپس مراحل اصلی الگوریتم EM به شرح زیر است:
-
از نرمافزار Kalman برای تخمین پارامتر حالت ناشناخته استفاده کنید α ( t )�(تی)با توجه به ( r ) t h(�)تیساعتارزش تکرار شده θr��.
-
مرحله E: انتظار مشروط را محاسبه کنید جی (θr) = E( ثبت ( l ) |L1،L2، .. ،Lمتر)جی(��)=�(ورود به سیستم(ل)|�1،�2،..،�متر)از ورود به سیستم ( l )ورود به سیستم(ل)تحت برآورد α ( t )�(تی)توزیع در مرحله 1، جایی که E( ∗ )�(∗)اپراتور انتظار است.
-
مرحله M: به حداکثر رساندن جی (θr)جی(��)، که مقدار تازه تکرار شده را به دست می دهد θr + 1��+1.
-
جایگزین کردن θr��با θr + 1��+1و مراحل 1، 2 و 3 را تا لگاریتم تابع درستنمایی مشترک تکرار کنید ورود به سیستم ( l )ورود به سیستم(ل)یا شکل نوآوری ها [ 23 ] افزایش نمی یابد.
2.4. نویز زدایی، درون یابی فضا-زمان، و پیش بینی
به عنوان ماتریس اچاچو پارامتر θ�تخمین زده می شود، بازگشت فیلتر کالمن را می توان انجام داد. لازم به ذکر است که مدل STKF نیازی به پیش پردازش ندارد، مانند درون یابی داده های از دست رفته، که می تواند در حین فیلتر کردن نویز به صورت پویا محاسبه شود. فرض کنید در نقطه زمانی تیتی، معادله مشاهده به صورت زیر است:
جایی که L1تی�تی1، اچ1،اچ1،و ε1تی�تی1به ترتیب داده های مشاهده شده، میدان های مکانی و خطاهای داده های مشاهده شده و L2تی�تی2، اچ2اچ2، و ε2تی�تی2به ترتیب داده های از دست رفته، فیلدهای مکانی و خطاهای داده های از دست رفته هستند. به منظور پیاده سازی بازگشت کالمن، تنظیم L2تی�تی2و اچ2تیاچتی2به ماتریس صفر [ 23 ]، تخمین α ( t )�(تی)را می توان به دست آورد
و ماتریس میانگین مربع-پیش بینی-خطا
که در آن ماتریس بهره کالمن جیتیجیتیاز رابطه زیر بدست می آید
مقادیر پیش بینی شده یک گام جلوتر توسط داده می شود
پیش بینی کوتاه مدت شامل پیش بینی بهینه از Yتی( ها )�تی(س) از جانب L1،L2، … ,Lمتراز جانب �1،�2،…،�متر، جایی که t ϵ { m + 1 , m + 2 , … }تی�{متر+1،متر+2،…}. بر اساس معادلات پیش بینی یک گام جلوتر (19) و (20)، برآوردگر پیش بینی بهینه αˆt | متر�^تی|متراز α ( t )�(تی)است
با ماتریس میانگین-مربع-پیش بینی-خطا
که در آن P عملگر ضرب است. پیش بینی بهینه از Yتی( ها )�تی(س)را می توان توسط Yˆتی( s ) = h( ها )تیαˆt | متر�^تی(س)=ساعت(س)تی�^تی|متر.
پس از به دست آوردن αˆt | تی�^تی|تی، برآوردگر بهینه از Yتی( ها )�تی(س)در هر نقطه مکانی سسو نقطه زمانی تیتیسود قابل محاسبه است
جایی که h ( s )ساعت(س)با رابطه (13) قابل محاسبه است.
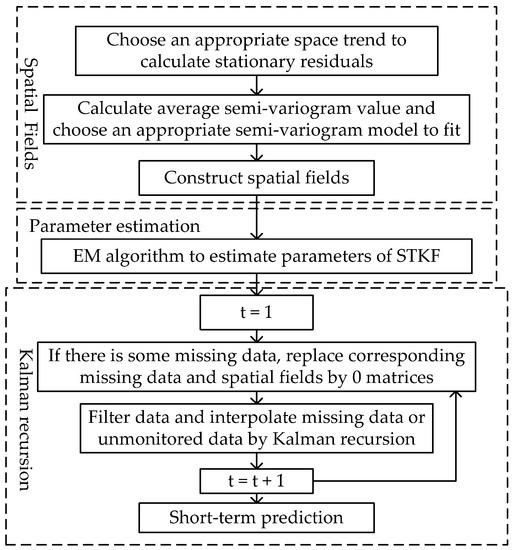
در نهایت، یک نمودار جریان از روند کلی STKF در شکل 1 نمایش داده شده است .
3. آزمایش شبیه سازی
برای شبیهسازی دادههای مشاهده جابجایی افقی یک سد، فرض کردیم که جابجایی افقی دارای یک روند منحنی درجه دوم در فضا است و در یک روند سینوسی در زمان تغییر میکند. جابجایی افقی یک سد در فضا و زمان را می توان با
در معادله (24) ggجابجایی است، سسموقعیت نقاط نظارت بر روی سد است، تیتیزمان است و ε�نویز مشاهده با انحراف استاندارد 0.1 میلی متر است. فرض کنید s = 0 ( m ) + 20 k ( m ) ، k = 0 ، 1 ، 2 ، … ، 22 س=0(متر)+20ک(متر) ،ک=0،1،2،…،22، در مجموع 23 امتیاز و t = 1 ( dیک سال) + 1 j ( dیک سال) , j = 0 , 1 , 2 , … , 2900 تی=1(دآ�)+1�(دآ�)، �=0،1،2،…،2900سپس سری داده های جابجایی افقی (نرخ نمونه برداری 1 روزه) 23 نقطه پایش شبیه سازی شده است.
همانطور که در بخش 2.2 ذکر شد ، به منظور به دست آوردن زمینه های فضایی اچاچ، ابتدا باید ماتریس روند را بدست می آوردیم افاف. از آنجایی که آزمایش شبیه سازی یک منحنی فضا-زمان شناخته شده را می سازد، میدان روند به عنوان شناخته می شود اف= [س2, s , 1 ]اف=[س2،س،1]. برای به دست آوردن فیلدهای اصلی، لازم بود یک مدل نیمه واریوگرام فضایی مناسب انتخاب شود. مدل های رایج مورد استفاده عبارتند از مدل نمایی، مدل گاوسی، مدل کروی و مدل خانواده ماترن [ 20 ، 21 ]. ما مدل کروی را در این آزمایش انتخاب کردیم زیرا میتواند تنوع فضایی را حداکثر نشان دهد و پرکاربردترین مدل نیمه واریوگرام فضایی است [ 24 ]. پارامتر بقیه θ = {آˆ0 | 0،پ0 |0، Φ ,Σε،Ση}�={آ^0|0،پ0|0،�،��،��}توسط الگوریتم EM، که در بخش 2.3 توضیح داده شده است، تخمین زده شد .
در آزمایش شبیهسازی، ابتدا از تمام دادهها برای فیلتر کردن نویز استفاده کردیم. ثانیا، به منظور تأیید اثربخشی درونیابی مکانی-زمانی با استفاده از STKF، ما به طور تصادفی یک نقطه را به عنوان داده مشاهده نشده، بقیه نقاط را به عنوان داده های مشاهده شده برای ایجاد یک مدل و از مدل ایجاد شده برای درون یابی جابجایی مشاهده نشده، نمونه برداری کردیم. ما فرآیند نمونه برداری را تا زمانی که تمام نقاط نظارت درون یابی شدند تکرار کردیم. نتایج درونیابی در شکل 2 نشان داده شده است . در نهایت، ما سه روز جابجایی افقی را برای تمام نقاط با استفاده از STKF پیشبینی کردیم. نتایج آماری فیلتر، درون یابی و پیش بینی در جدول 1 و سپس مدل آماری نشان داده شده است.RMS1���1:
جایی که Yˆمن�^منمقدار تخمینی است، آرمن�منارزش واقعی است و ننتعداد است Yˆمن�^من.
همانطور که شکل 2 نشان می دهد، مقادیر درون یابی با مقادیر مشاهده شده منطبق هستند. به این ترتیب، میتوان گفت که STKF میتواند دادههای نقطهای را بدون نظارت به خوبی درونیابی کند. همانطور که در جدول 1 فهرست شده است ، درونیابی و فیلتر RMS1���1حدود 0.03 میلی متر بود که در مقایسه با نویز که انحراف معیار آن 0.1 میلی متر بود حدود 70 درصد کاهش یافته بود. نتیجه درون یابی و نتیجه فیلتر بسیار نزدیک بودند، که ممکن است به این دلیل باشد که ما از یک ماتریس روند بسیار دقیق استفاده کردیم. برای نتیجه پیشبینی، دقت پیشبینی کمتر از فیلتر و درونیابی بود. RMS آن حدود 0.05 میلی متر با حداکثر مقدار 0.091 میلی متر بود که نزدیک به انحراف استاندارد 0.1 میلی متر بود.
4. کاربرد
4.1. شرح داده های تراز سیم کششی سد Wuqiangxi
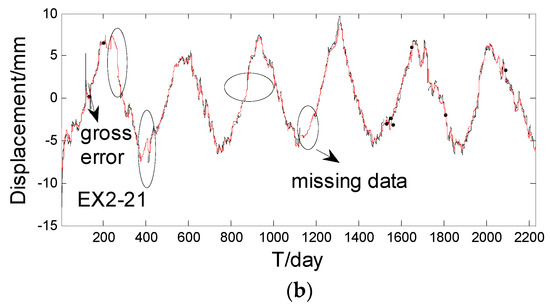
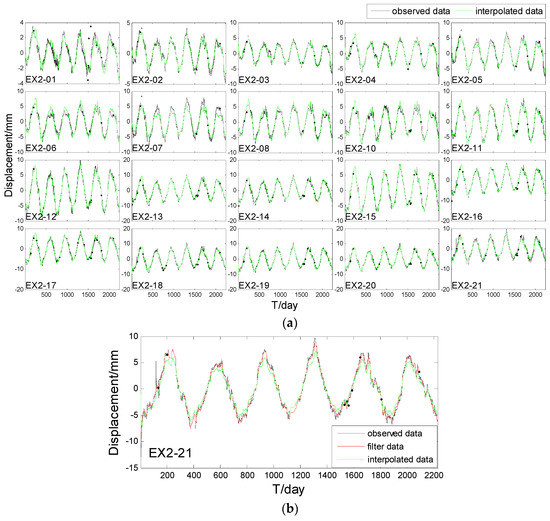
داده های جابجایی افقی واقعی از تراز سیم کششی سد Wuqiangxi به دست آمده است. سد Wuqiangxi، واقع در جریان اصلی رودخانه یوان در شهرستان یوانلینگ استان هونان، در سال 1994 ساخته شد. این سد یک سد بتنی ثقلی با طول افقی 724.4 متر، ارتفاع تاج 85.8 متر و حداکثر آب است. حجم مخزن از 4.29×109 m34.29×109 m3. سمت چپ سد یک مجموعه ژنراتور با توان است 1.2×106 KW1.2×106 KWو سمت راست سد یک قفل ناوبری است. پی این سد را می توان به چهار نوع ماسه سنگی، کوارتزیتی، تخته سنگی و تخته سنگی تقسیم کرد. این سد مجهز به سیستم مانیتورینگ اتوماتیک تراز سیم، خط لوله معکوس، تسطیح هیدرواستاتیک، نظارت بر نشت، پایش فشار بالابر و سیستم اندازه گیری سطح آب است [25 ] . سد Wuqiangxi شامل دو ردیف سیم کششی EX1 و EX2 است. ما دادههای هم ترازی سیم کششی EX2 را در آزمایش انتخاب کردیم، که از 23 نقطه اندازهگیری و اطلاعات موقعیت یکبعدی آنها تشکیل شدهاند، با نقاط اصلی آنها در سمت چپ تراز سیم کششی EX2، همانطور که در جدول 2 شکل 3 ارائه شده است . داده های جابجایی شامل 2233 مشاهدات روزانه از 1 ژوئیه 2004 تا 11 اوت 2010 است..توزیع مکان های تراز سیم کششی را نشان می دهد. در آزمایش ما، دادههای جابجایی EX2_09، EX2_22، و EX2_23 به دلیل کیفیت پایین حذف شدند. شکل 4 a توالی جابجایی تمام نقاط انتخاب شده را نشان می دهد. از شکل 4 الف، می توان نتیجه گرفت که داده های جابجایی دارای روندهای فصلی قابل توجهی در حوزه زمان هستند. به منظور استخراج اطلاعات بیشتر از داده های مشاهده، شکل 4 ب تقویت داده های جابجایی نقطه EX2_21 را نشان می دهد. یک خطای فاحش در زمان صدمین روز رخ داد که منجر به گم شدن برخی از دادههای با طولهای مختلف در کل دنباله جابجایی شد.
4.2. فیلترینگ، درون یابی مکانی و زمانی و پیش بینی
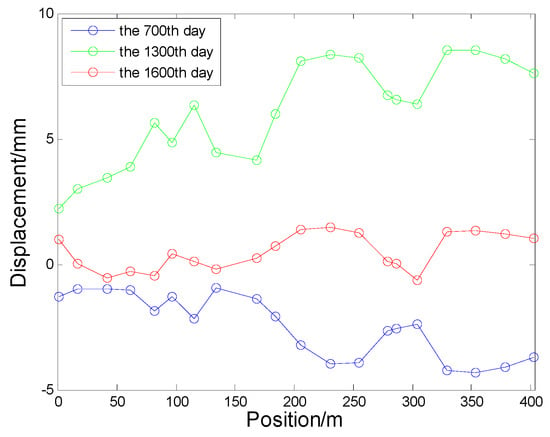
در این آزمایش از داده های جابجایی قبل از 8 آگوست 2010 برای فیلتر کردن و درونیابی استفاده شد. دادههای جابجایی از 9 تا 11 اوت 2010 برای تأیید اثربخشی پیشبینی استفاده شد. مشابه آزمایش شبیهسازی، ابتدا از STKF برای فیلتر کردن دادههای مشاهدهشده استفاده کردیم. در مرحله دوم، به منظور بررسی اثربخشی درون یابی مکانی-زمانی با استفاده از STKF، 19 نقطه را به عنوان نقاط مشاهده و نقطه استراحت را به عنوان نقطه بازرسی انتخاب کردیم. ما این روند را تا زمانی که تمام نقاط درون یابی شدند تکرار کردیم. ثالثاً، ما جابجایی سه روزه همه 20 نقطه را برای بررسی اثربخشی پیشبینی مکانی-زمانی STKF پیشبینی کردیم. در نهایت، کل جابجایی افقی سد در حوزه مکانی-زمانی برای مشاهده تغییرات مکانی-زمانی آن درون یابی شد. و سه روز پیشبینی جابجایی افقی برای کل سد نیز گنجانده شد. با توجه به نمودار جریان STKF، ما به طور تصادفی داده های 700، 1300 و 1600 روز جابجایی افقی سد را در تحلیل انتخاب کردیم تا ابتدا روند فضا را انتخاب کنیم.
شکل 5 نشان می دهد که داده های جابجایی افقی دارای روند خطی هستند، بنابراین ماتریس روند انتخاب شده است F=[s,1]�=[�,1]. مشابه آزمایش شبیهسازی، یک مدل نیمه واریوگرام کروی نیز برای توصیف تغییرات فضایی محلی انتخاب شد. به عنوان پارامتر θ�STKF ثابت شد، سری های فیلتر مکانی-زمانی، سری های درونیابی مکانی-زمانی، و مقادیر پیش بینی مکانی-زمانی را می توان با اجرای بخش بازگشتی STKF در بخش 2.4 به دست آورد . شکل 6 a سری های زمانی فیلتر شده تمام نقاط را رسم می کند و نتیجه فیلتر نقطه EX2_21 در شکل 6 ب بزرگ شده است. شکل 7 a سری های زمانی درون یابی شده همه نقاط را نشان می دهد و نتیجه درون یابی نقطه EX2_21 در شکل 7 ب بزرگ شده است. به منظور مقایسه نتیجه فیلتر و نتیجه درونیابی، نتیجه فیلتر نقطه EX2_21 نیز در شکل 7 ب نشان داده شده است. جدول 3نتایج آماری فیلترینگ، درون یابی و پیش بینی را نشان می دهد. مدل آماری از RMS2���2به شرح زیر است:
جایی که Yˆمن�^منمقدار تخمینی است، Oمن�منمقدار مشاهده شده است و ننتعداد است Yˆمن�^من.
همانطور که شکل 6 نشان می دهد، STKF در فیلتر کردن نقاط مشاهده کاملاً قابل اعتماد است. نتیجه نه تنها خطای مشاهده سری را کاهش می دهد، بلکه تغییر ارتفاع دقیق را نیز حفظ می کند. همانطور که در شکل 6 ب نشان داده شده است، در روز 100 جهش های بزرگی وجود دارد که ممکن است به دلیل برخی اختلالات ابزاری در آن روز ایجاد شده باشد. ما اینها را به عنوان خطاهای فاحش در نظر می گیریم و STKF می تواند اثرات آنها را به میزان قابل توجهی کاهش دهد. بیضی در شکل 6 b داده های گمشده درونیابی شده را با درونیابی مکانی-زمانی نشان می دهد. نتایج داده های گمشده درون یابی می توانند به خوبی با نتایج فیلتر ارتباط برقرار کنند، بنابراین می توانیم نتیجه بگیریم که STKF روش مناسبی برای درون یابی داده های از دست رفته است.
در شکل 7 a، نمودار سری زمانی درونیابی شده با نمودار سری زمانی اصلی منطبق است به جز برخی از نقاط با مقادیر اوج، مانند EX2-05، EX2-06، EX2-07، EX2-08، و EX2-21. در شکل 7 ب، تفاوت اندکی بین نتایج روز 200، روز 800 و روز 1300 وجود دارد. با این حال، در EX2-11، EX2-12، EX2-13، EX2-14، EX2-15 و غیره، نتایج درون یابی حتی برای مقادیر اوج بسیار خوب عمل می کنند. دلیل احتمالی این واقعیت می تواند این باشد که ماتریس روند انتخابی بسیار دقیق نیست و مدل نیمه متغیر نمی تواند تمام تغییرات فضایی باقیمانده را توصیف کند. از جدول 3 می بینیم که فیلتر RMS2���2، درون یابی RMS2���2، و پیش بینی آرMS2��اس2به ترتیب حدود 0.1 میلی متر، 0.5 میلی متر و 0.8 میلی متر هستند. بزرگترین پیش بینی R Mاس2آرماس2تا 1.14 میلی متر در EX2_14 است که نشان می دهد مدل STKF هنوز از دقت پیش بینی بالایی برخوردار است. درون یابی بزرگتر R Mاس2آرماس2در EX2_6 و EX2_7 رخ می دهد که تا 1.12 میلی متر و 1.67 میلی متر است، به دلیل عملکرد کمی ضعیف در مقادیر پیک.
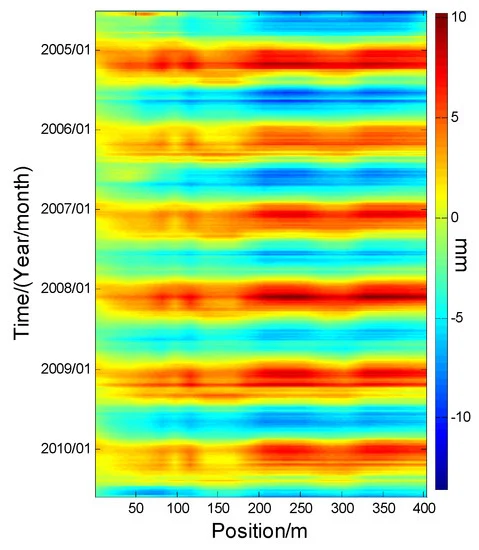
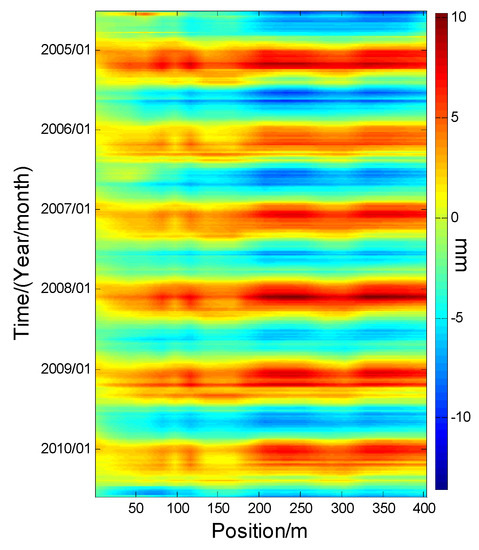
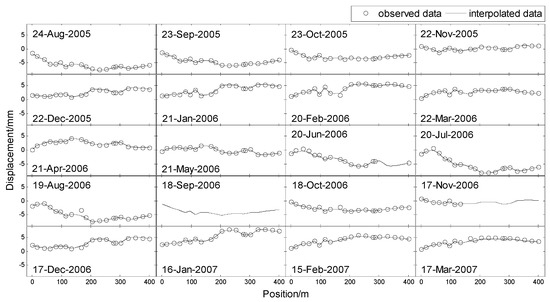
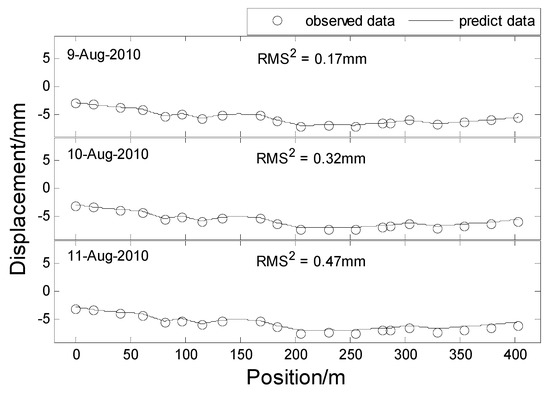
پس از بررسی اثربخشی درونیابی مکانی-زمانی و STKF مبتنی بر پیشبینی، میتوان کل تغییر شکل سد در حوزه مکانی-زمانی را درون یابی کرد و یک پیشبینی مکانی-زمانی کوتاهمدت برای کل سد نیز پیشبینی کرد. شکل 8 جابجایی افقی درون یابی کل سد را در حوزه مکانی – زمانی نشان می دهد. ما به طور مساوی 20 روز از نتایج جابجایی درون یابی کل سد را بین روز 420 (24 اوت 2005) و روز 1000 (17 مارس 2007) برای مشاهده تغییرات مکانی- زمانی انتخاب کردیم که در شکل 9 نشان داده شده است . شکل 10 نتایج پیش بینی 3 روزه را برای کل جابجایی افقی سد نشان می دهد.
در شکل 8 و شکل 9 ، جابجایی افقی سد، تغییرات تناوبی «صعود-نزولی» را در حوزه زمان نشان میدهد. برخی از دادههای گمشده در روزهای 20 ژوئن 2006 و 17 نوامبر 2006 ظاهر میشوند و تمام دادههای روز 16 سپتامبر 2006 کاملاً از دست رفته است. پدیده جالبی وجود دارد که نتایج درونیابی شده برای ناحیه از دست رفته به طور مکرر مشابه نتایج همان ناحیه در زیرشکل بعدی است. به عنوان مثال، نتایج درونیابی داده های گمشده در 20 ژوئن 2006 و 18 سپتامبر 2006 بسیار شبیه به نتایج 20 جولای 2006 و 18 سپتامبر 2006 است. این نشان میدهد که نتیجه درونیابی نه تنها تحتتاثیر نقاط اندازهگیری اطراف آن در حوزه فضایی، بلکه توسط دادههای اطراف آن در حوزه زمانی قرار میگیرد. که درشکل 10 ، نتیجه پیش بینی کوتاه مدت با داده های اصلی مطابقت دارد، اما نتیجه آماری آن از RMS2���2به نظر می رسد که مدل همراه با طول پیش بینی به عقب بزرگتر باشد. این نشان می دهد که نتیجه پیش بینی ممکن است برای پیش بینی طولانی مدت نادرست باشد.
5. نتیجه گیری ها
این مقاله از مدل STKF، که ترکیبی از فیلتر کالمن و مدل کریجینگ است، برای تجزیه و تحلیل دادههای تغییر شکل سد استفاده کرد. تمام نقاط با هم پردازش می شوند و تغییر شکل سد به عنوان یک کل تجزیه و تحلیل می شود. از آزمایشها با دادههای شبیهسازی و دادههای سیم کششی سد Wuqiangxi، میتوانیم استنباط کنیم که STKF نه تنها میتواند نویز دادههای تغییر شکل را فیلتر کرده و تغییر شکل نقاط را به طور موثر در حوزه زمانی و فضایی پیشبینی کند، بلکه میتواند دادههای گمشده را نیز درونیابی کند. یا تاریخ برای هر موقعیت سد صرف نظر از اینکه نقطه پایش در کجا قرار دارد که با روش فیلتر کالمن تک نقطه ای نمی توان به آن دست یافت، زیرا همبستگی مکانی را در نظر نمی گیرد.







بدون نظر