1. معرفی
انواع فنآوریهای ناوبری داخلی بر اساس اصول و سختافزارهای مختلف در دو دهه گذشته توسعه یافتهاند [ 1 ]. برخی از این روش ها برای دستیابی به دقت بالا به زیرساخت های فشرده یا پیشرفته بستگی دارند و ممکن است برای ارسال یا دریافت سیگنال مربوطه به دستگاه خاصی نیاز داشته باشند. به طور مشابه، روشهای دقیق مبتنی بر اینرسی معمولاً یک حسگر را در قسمت خاصی از بدن کاربر قرار میدهند تا بر عدم دقت حسگرهای قبلی غلبه کنند [ 2] .]. چنین الزاماتی پرهزینه و ناخوشایند هستند، اما تکثیر گوشیهای هوشمند به یک انقلاب تکنولوژیک در ناوبری داخلی دامن زده است. حسگرهای مختلف در گوشیهای هوشمند، مانند سیستم ناوبری ماهوارهای جهانی (تراشه GNSS)، وایفای، بلوتوث، شتابسنج، ژیروسکوپ، مغناطیسسنج، دوربین و حتی فشارسنج یا حسگر نور محیط را میتوان برای کمک به ناوبری استفاده کرد. علاوه بر حسگرهای مختلف، همه جا بودن آن ها دلیل دیگری است که چرا گوشی های هوشمند به عنوان ناوبری موبایل شخصی ایده آل به نظر می رسند. بسیاری از کسانی که از تلفن های هوشمند برای برنامه های ناوبری در فضای باز استفاده می کنند از سیستم های مبتنی بر GNSS استفاده می کنند. با این حال، مردم در واقع 90٪ از زمان خود را در داخل خانه می گذرانند، که یک محیط GNSS رد شده است [ 3]]. خوشبختانه، ویژگیهای سنسورهای مختلف تعبیهشده در گوشیهای هوشمند، فناوریهای ناوبری پیشرفته را ممکن میسازد و میتواند با استفاده از مکمل بودن آنها برای ناوبری داخلی عابر پیاده، به تخمینهای محکمی دست یابد. Retscher و Hecht امکان استفاده از تلفن های هوشمند مختلف برای ردیابی در سرویس مبتنی بر مکان (LBS) و سایر برنامه های ناوبری را در تحقیقات خود نشان می دهند [ 4 ]. لیو و همکاران یک موتور موقعیتیابی داخلی مبتنی بر گوشیهای هوشمند را پیشنهاد دهید که تنها بر سختافزار داخلی و منابع محاسباتی متکی است [ 5]]. تحقیقات آنها پتانسیل و امکان استفاده از گوشی های هوشمند برای مسیریابی را نشان می دهد. اگرچه از آنجایی که گوشیهای هوشمند دستگاههای موقعیتیابی اختصاصی نیستند، دقت چنین سنسورهای سیستم میکرو الکترومکانیکی (MEMS) هنوز چیزهای زیادی را برای شما باقی میگذارد. با این حال، عملکرد بهتر و اندازه کوچکتر را می توان در آینده نزدیک انتظار داشت.
محاسبه مردگان عابر پیاده (PDR) یکی از متداول ترین فناوری های مورد استفاده برای ناوبری عابر پیاده در داخل ساختمان است. PDR بر اساس شتاب سنج، ژیروسکوپ و مغناطیس سنج، مکان دو بعدی عابران را تخمین می زند. برای ناوبری عابر پیاده مبتنی بر گوشی هوشمند، شتابسنج معمولاً برای شمارش گامها استفاده میشود و ژیروسکوپ و مغناطیسسنج برای تخمین مسیر، همراه با مدل طول گام برای تصمیمگیری حرکت استفاده میشوند. مزیت استفاده از شتاب سنج برای شمارش مراحل این است که از خطاهای انباشته شده در موقعیت ها به دلیل ادغام مضاعف شتاب جلوگیری می کند. توضیح بیشتر، ارتعاشات و ناهماهنگی (بین قاب بدنه حسگر و قاب عابر پیاده) ناشی از نگه داشتن گوشی هوشمند منجر به ایجاد نویز و پیش بینی های جاذبه در هر محور می شود که منجر به تخمین موقعیت نادرست با یکپارچه سازی می شود.
با این حال، اگرچه PDR دارای مزایای مختلفی است، اما همچنان از خطاهای الگوریتم رنج می برد. اولاً، خطاهای شمارش گام ناشی از یک الگوریتم تنظیم ناکافی معمولاً توسط کاربر و رفتار استفاده ایجاد می شود. به عنوان مثال، هنگامی که از تشخیص اوج آستانه همراه با فاصله زمانی استفاده میشود، معمولاً در تشخیص مراحل در ابتدا و انتهای پیادهروی شکست میخورد زیرا ویژگیهای مراحل در آن مراحل معمولاً متفاوت است [6 ]]. این مراحل از دست رفته بسته به تعداد و طول گام، یک خطای موقعیت انباشته ایجاد می کنند که منجر به دومین منبع خطا می شود: طول گام. طول گام اغلب از فرمول های تجربی بر اساس شتاب، ویژگی های افراد، و ضرایب مربوطه مربوط به دست می آید. متأسفانه، اکثر تخمینهای طول گام نمیتوانند به طور دقیق ویژگیها و عادات راه رفتن کاربران را برآورده کنند. واینبرگ گزارش می دهد که طول گام می تواند تا 40 درصد با افراد مختلف در یک سرعت راه رفتن معین، و تا 50 درصد با سرعت های راه رفتن و افراد مختلف متفاوت باشد [ 7 ]. هو و همکاران یک تخمینگر طول گام تطبیقی را بر اساس یک نرمتر تبدیل فوریه سریع و مجموعهای از قوانین تشخیص گام پیشنهاد کنید، که بهطور دقیق طول گام را تخمین میزند [ 8]]. تسای و همکاران سه مدل دقیق طول گام تجربی را مقایسه می کند و عملکرد PDR آنها را ارزیابی می کند [ 9 ]. طبق تحقیقات آنها، برآورد دقیق طول گام به طور کلی نیاز به پیش کالیبراسیون یا برخی تجزیه و تحلیل ها در پس پردازش برای تعیین پارامترهای بهینه برای هر فرد دارد که نمی تواند به راحتی توسط عموم پیاده سازی شود. در همین حال، سیستمی که به پارامترهای تنظیم وابسته است معمولاً تعمیم پذیری ضعیفی دارد، که منجر به این می شود که سیستم نمایشی به دلیل عدم قطعیت پارامترها بهتر از سیستم تولید عمل کند [10 ] . علاوه بر پارامترهای تنظیم، روشهای پیشرفتهای برای تشخیص مراحل و تخمین دقیق طول گامها در زمان واقعی وجود دارد، مانند ژیروسکوپ متصل به زانو [ 11] .] و یک شتاب سنج متصل به کمر [ 12 ]. به طور طبیعی، این مستلزم نصب سنسورهای دقیق (هزینه بیشتر) در قسمت های خاصی از بدن است که به سختی برای کاربران عمومی که فقط گوشی های هوشمند دارند جذاب خواهد بود.
علاوه بر خطاهای فوق مربوط به مسافت، منبع خطای سوم نیز عنوان (زیموت) است. مغناطیسسنجها و ژیروسکوپها بهترتیب برای ارائه دادهها برای عنوان و چرخش استفاده میشوند. عنوان مشتق شده از یک مغناطیس سنج بر اساس اندازه گیری میدان مغناطیسی زمین است و هیچ خطایی با زمان انباشته نشده است. با این حال، میدان های مغناطیسی اندازه گیری شده معمولاً تحت تأثیر اثرات آهن سخت و نرم قرار می گیرند [ 13]. این اثرات معمولاً کالیبره می شوند زیرا رابطه بین مغناطیس سنج و سایر اجزای مغناطیسی در یک دستگاه ثابت است. با این حال، برخی از محیط ها مواد مغناطیسی و دستگاه های زیادی با میدان مغناطیسی قوی را در خود نگه می دارند. آنها باعث می شوند که مغناطیس سنج کارایی و دقت خود را در حین سنجش از دست بدهد و حتی خاصیت میدان مغناطیسی داخلی را تغییر دهد که پارامترهای جبران پیش فرض تنظیم شده کارخانه را باطل می کند. علی و همکاران یک روش پیشرفته به نام کالیبراسیون مبتنی بر بهینهسازی ازدحام ذرات (PSO) برای تخمین دقیق مقادیر بایاس و ضریب مقیاس برای مغناطیسسنجهای کمهزینه پیشنهاد کنید [14 ]]. علاوه بر این، برخی از روشهای کالیبراسیون بلادرنگ، مانند چرخش شکل-8، نیز ظاهر شدند. با این حال، انطباق آنها با عموم با دانش فنی اندک آسان نیست. بنابراین، عنوان مبتنی بر مغناطیسسنج همچنان میتواند در یک محیط مغناطیسی-خصمانه دقت خود را از دست بدهد و مقادیر نادرست تولید کند. از سوی دیگر، ژیروسکوپ یک سنسور نسبتاً مستقل از محیط است. اندازهگیریهای ژیروسکوپ تحت تأثیر محیط قرار نمیگیرند. اما ویژگی های یک ژیروسکوپ نیاز به یک عنوان اولیه دارد و خطاهای آن با گذشت زمان جمع می شوند. در نتیجه، یک مغناطیسسنج و یک ژیروسکوپ مکمل یکدیگر هستند، و استفاده با هم میتواند تخمین عنوان بهتری را نسبت به هر کدام که جداگانه استفاده میشود، ارائه دهد. با این حال، حتی اگر یک عنوان یکپارچه استفاده شود، عملکرد همچنان به پارامترهای تنظیم شده الگوریتم ادغام بستگی دارد. که تحت تاثیر میدان مغناطیسی محیطی و همچنین مشخصات ژیروسکوپ مورد استفاده قرار می گیرد. همانطور که گفته شد، برای حفظ دقت ناوبری، یک PDR یکپارچه با یک سیستم موقعیت یابی خارجی دیگر مورد نیاز است.
انواع بسیاری از فناوریهای موقعیتیابی وجود دارد که میتوانند با PDR ادغام شوند، مانند موقعیتیابی Wi-Fi مبتنی بر نشانگر قدرت سیگنال دریافتی (RSSI) [15]، بلوتوث iBeacon [ 16 ]، کمک نقشه داخلی (شامل نشانههای داخلی و مدل دیجیتال) [ 17 ، 18 ]، و غیره برخی از محققان بیشتر یکپارچه سازی ترکیبی مانند سیستم مغناطیسی/Wi-Fi/PDR [ 19 ]، Wi-Fi/map/PDR [ 20 ] و مغناطیسی/لندمارک/PDR [ 21 ] را پیشنهاد می کنند. این محققین بر روی توسعه یک سیستم یکپارچه برای ناوبری داخلی اتفاق نظر دارند. در سال 2016 یکی از معروف ترین بازی های موبایل به نام Pokemon GOاپلیکیشن واقعیت افزوده (AR) را در گوشی هوشمند تبلیغ کرد. بسیاری از کارشناسان تأثیرات این پدیده را بر خدمات مبتنی بر مکان (LBS) گزارش کرده اند. AR دنیای واقعی و اطلاعات مجازی را با دوربین به هم متصل می کند. بنابراین، اگر کاربر به استفاده از دوربین گوشی هوشمند برای LBS عادت داشته باشد، محلیسازی مبتنی بر تصویر داخلی را میتوان به عنوان سیستم موقعیتیابی ایدهآل در نظر گرفت که با PDR ادغام میشود.
یک سیستم محلیسازی مبتنی بر تصویر داخلی معمولاً مبتنی بر فناوریهای بینایی کامپیوتری و روباتیک مانند مکانیابی و نقشهبرداری همزمان (SLAM) و کیلومتر شماری بصری است [22 ] . بسیاری از تصاویر استریو گرفته شده توسط دوربین های متعدد می توانند برای تخمین موقعیت و نگرش نسبی استفاده شوند. به طور مشابه، تصاویر متوالی گرفته شده توسط دوربین تک را می توان برای تخمین حرکت و چرخش نسبی استفاده کرد. نونز و همکاران یک سیستم کیلومتر شماری بصری جدید با استفاده از دوربینهای استریو پیشنهاد کنید و چهار نوع روش کیلومترسنجی را با هم مقایسه کنید [ 23 ]. ژانگ و همکاران پیشنهاد یک سیستم جدید RGB-D SLAM مبتنی بر کیلومتر شماری بصری و یک فیلتر اطلاعات گسترده [ 24]]. همپوشانی تصاویر نقش مهمی در آن سیستم ها ایفا می کند. از سوی دیگر، برخی از روش های مبتنی بر تصویر، تصویر پرس و جو را با تصویر مرجع در پایگاه داده تطبیق می دهند و سپس مکان تصویر مرجع را به عنوان مکان کاربر می دهند. این روشهای پیشرفته موقعیت و نگرش نسبی بین تصویر مرجع و تصویر کاربر را بیشتر تخمین میزنند. درتی و همکاران روشی را پیشنهاد میکند که از تصاویر یک دوربین تکچشمی منطبق با پایگاه داده ویژگیها برای به دست آوردن موقعیت دوربین در یک محیط داخلی قبلاً نقشهبرداری شده استفاده میکند [ 25]]. اگرچه بین این روش های مبتنی بر تصویر تفاوت هایی وجود دارد، اما همه آنها از تشخیص ویژگی و تطبیق تصویر استفاده می کنند. در همین حال، آنها باید به طور متوالی عکس بگیرند، که فراتر از توان کاربران عمومی است که با تلفن های هوشمند خود برای موقعیت یابی مداوم حرکت می کنند. بنابراین، ادغام سایر سیستم های موقعیت یابی باید برای بهبود ناراحتی و افزایش سرعت روش های مبتنی بر تصویر مورد توجه قرار گیرد. گریسباخ و همکاران پیشنهاد یک سیستم ناوبری اینرسی با کمک دید استریو کم هزینه که در آن از اندازه گیری های اینرسی برای محدود کردن دامنه تطابق تصویر در حین ردیابی نقاط ویژگی استفاده می شود [26 ]]. با این حال، این سیستم یکپارچه و بیشتر مکانیابیهای مبتنی بر تصویر در یک سیستم مختصات نسبی حرکت میکنند. بنابراین، برخی از محققان از تصاویر ارجاع جغرافیایی برای ارائه مختصات مطلق برای ناوبری استفاده می کنند. لیانگ و همکاران یک محلی سازی مبتنی بر تصویر را بر اساس پایگاه داده تصویر ارجاع داده شده جغرافیایی پیشنهاد کنید [ 27 ]. لی و همکاران یک رویکرد ناوبری چشم انداز مبتنی بر پایگاه داده تصویری ارجاع داده شده جغرافیایی برای تسهیل ناوبری مداوم و قوی وسیله نقلیه، یکپارچه با سیستم یکپارچه سازی سیستم موقعیت یابی جهانی (GPS) و سیستم ناوبری اینرسی (INS) [28] پیشنهاد کنید .]. به طور مشابه، برداشتن فضا بر اساس تصاویر ارجاعشده جغرافیایی میتواند موقعیت را در یک سیستم مختصات مطلق فراهم کند که تنها به یک تصویر پرسوجو نیاز دارد. با این حال، همچنان به تشخیص ویژگی و تطبیق تصویر نیاز دارد. بنابراین، برداشت فضایی ادغام شده با PDR در این تحقیق استفاده می شود. در نتیجه، محلی سازی مبتنی بر تصویر سنتی به دوربین های متعدد یا تصاویر متوالی و موقعیت در یک سیستم مختصات نسبی نیاز دارد. PDR با کمک برداشت فضایی فقط به یک دوربین و تصاویر بسیار کمی نیاز دارد (زمانی که PDR بدتر می شود اجرا می شود و برای تخمین موقعیت فقط تصاویر منفرد مورد نیاز است). در همین حال، موقعیت تخمین زده شده در یک سیستم مختصات مطلق است.
برداشتن فضایی یک روش فتوگرامتری است که برای تعیین شش پارامتر جهت گیری بیرونی (EOPs) مرکز نوردهی یک عکس واحد استفاده می شود [ 29]]. EOP ها شامل موقعیت های سه بعدی (X، Y، Z) و زوایای نگرش (امگا، فی و کاپا) هستند. اینها با استفاده از معادلات همخطی و یک تصویر عکاسی با فاصله اصلی شناخته شده از دوربین مورد استفاده، و همچنین حداقل سه نقطه کنترل که مختصات زمین سه بعدی آنها مشخص است و همچنین در تصویر ظاهر می شود، حل می شوند. معادلات همخطی بر اساس این شرط است که دوربین، نقطه کنترل (نقطه شی) و نقطه تصویر مربوطه آن همه روی یک خط مستقیم قرار گیرند. از آنجایی که معادلات همخطی غیرخطی هستند و با استفاده از قضیه تیلور خطی شده اند، مقادیر اولیه پارامتر خارجی برای محاسبه تکراری مورد نیاز است. مقادیر اولیه ضعیف باعث واگرایی برداشتن فضایی می شود. برداشتن فضایی با استفاده از معادلات هم خطی یک روش کاملا عددی است. که امکان استفاده از روش حداقل مربعات را با مقادیر اضافی نقاط کنترل برای محتمل ترین تخمین فراهم می کند. لی و همکاران یک مکانسازی مبتنی بر تصویر ترکیبی برای ناوبری یکپارچه بر اساس GNSS، قطبنما، دوربین کالیبرهشده و برداشت فضا با تصاویر ارجاعشده جغرافیایی پیشنهاد کنید.30]. آنها بر این باورند که چنین فناوری هایی پتانسیل ناوبری داخلی و خارجی با استفاده از تلفن هوشمند را دارند. با این حال، مقادیر اولیه آنها برای برداشتن فضا توسط GNSS و حسگر جهت (قطبنما برای حرکت و شتابسنج برای چرخش و زمین) در محیطهای بیرونی و داخلی ارائه میشود: آنها از تلفنهای هوشمند برای ناوبری در فضای باز استفاده میکنند زیرا GNSS مقادیر اولیه خوبی را در همه جا ارائه میکند. آنها از یک ضبط کننده ویدئو در یک وسیله نقلیه متحرک برای ناوبری داخلی استفاده می کنند زیرا اولین مقادیر اولیه برداشتن فضا توسط GNSS ارائه می شود، اما مقادیر اولیه بعدی توسط راه حل قبلی برداشتن فضا ارائه می شود که به معنای نیاز به گرفتن مکرر تصویر است. علاوه بر این، تمام دستگاه های مورد استفاده در تحقیقات او برای دقت موقعیت بهتر کالیبره شده اند. همانطور که اشاره شد، گرفتن متوالی تصاویر و کالیبراسیون برای کاربر عادی ناخوشایند است. بنابراین، تحقیق ما یک PDR به کمک برداشت فضایی را پیشنهاد میکند. PDR مقادیر اولیه را برای برداشتن فضا در طول ناوبری داخلی فراهم می کند. در همین حال، برداشتن فضایی دقت PDR را حفظ می کند. از سوی دیگر، دقت برداشتن فضا عمدتاً به دوربین کالیبره شده بستگی دارد. بنابراین، این تحقیق همچنین تأثیر پارامترهای کالیبره شده با هندسه متفاوت نقاط کنترل را در یک آزمایشگاه کالیبراسیون دوربین حرفهای مورد تجزیه و تحلیل قرار داد، سپس یک روش حداقل مربعات وزنی تطبیقی را برای به حداقل رساندن خطای ناشی از دوربین تلفن هوشمند کالیبره نشده پیشنهاد کرد. برداشتن فضایی دقت PDR را حفظ می کند. از سوی دیگر، دقت برداشتن فضا عمدتاً به دوربین کالیبره شده بستگی دارد. بنابراین، این تحقیق همچنین تأثیر پارامترهای کالیبره شده با هندسه متفاوت نقاط کنترل را در یک آزمایشگاه کالیبراسیون دوربین حرفهای مورد تجزیه و تحلیل قرار داد، سپس یک روش حداقل مربعات وزنی تطبیقی را برای به حداقل رساندن خطای ناشی از دوربین تلفن هوشمند کالیبره نشده پیشنهاد کرد. برداشتن فضایی دقت PDR را حفظ می کند. از سوی دیگر، دقت برداشتن فضا عمدتاً به دوربین کالیبره شده بستگی دارد. بنابراین، این تحقیق همچنین تأثیر پارامترهای کالیبره شده با هندسه متفاوت نقاط کنترل را در یک آزمایشگاه کالیبراسیون دوربین حرفهای مورد تجزیه و تحلیل قرار داد، سپس یک روش حداقل مربعات وزنی تطبیقی را برای به حداقل رساندن خطای ناشی از دوربین تلفن هوشمند کالیبره نشده پیشنهاد کرد.
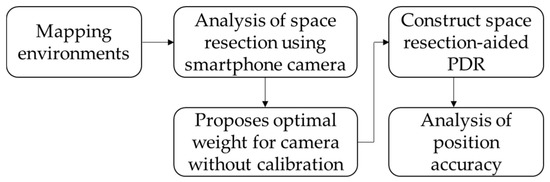
این تحقیق استفاده جدیدی از برداشتن فضایی را برای کمک به PDR با تصاویر ارجاعشده جغرافیایی در یک محیط نقشهبرداری شده قبلی پیشنهاد میکند. گوشی هوشمند تنها دستگاه مورد استفاده است. الگوریتم پیشنهادی PDR را قادر میسازد تا ناوبری مداوم بین هر تصویر را برای کاهش نیاز به گرفتن و پردازش مداوم عکسها فراهم کند و همچنین مقادیر اولیه را برای محاسبه تکراری برای برداشتن فضای داخلی فراهم میکند. از طرف دیگر برداشتن فضایی خطای انباشته شده PDR را کاهش می دهد. در همین حال، خطای موقعیت برداشتن فضا ناشی از استفاده از یک دوربین تلفن هوشمند کالیبره نشده پس از اعمال روش وزن تطبیقی پیشنهادی بهبود مییابد. در نهایت، الگوریتم پیشنهادی در یک سیستم مختصات مطلق حرکت میکند و از کالیبراسیون فردی، پارامترهای تنظیم، زیرساختهای محیطی اجتناب میکند.شکل 1نمودار جریان کامل این تحقیق را نشان می دهد. مرحله اول کار آماده سازی محیط های نقشه برداری است. تجزیه و تحلیل برداشتن فضایی مرحله دوم است که برای درک بهتر ویژگی های برداشتن فضایی با استفاده از دوربین گوشی هوشمند استفاده می شود. این تجزیه و تحلیل به ما کمک می کند تا برداشت فضای مبتنی بر گوشی هوشمند را با استفاده از روش حداقل مربعات وزنی تطبیقی تخمین بزنیم، که خطای ناشی از استفاده از پارامترهای جهت گیری داخلی کالیبره نشده (IOPs) را کاهش می دهد. مرحله سوم، ناوبری عملی عابر پیاده در داخل ساختمان است که PDR با کمک برداشتن فضای وزنی تطبیقی پیشنهادی را در یک صحنه واقعی اجرا میکند. تصاویر ارجاع جغرافیایی یک صحنه واقعی با TWD97 (Taiwan Datum 1997) با استفاده از سیستم نقشه برداری موبایل داخلی (IMMS) به جای ایستگاه کل به دست می آیند. که مختصات زمینی نقطه کنترل را با اندازه گیری تصاویر ارجاع شده جغرافیایی فراهم می کند. IMMS کارایی بهتری با دقت نقشه برداری دارد که از سطح زیر متر تا متر متغیر است. بنابراین، این تحقیق همچنین عملکرد برداشت فضایی را با استفاده از تصاویر ارجاع جغرافیایی IMMS ارزیابی میکند. علاوه بر این، یک بررسی سنتی با ایستگاه کل برای تمام نقاط چک استفاده می شود که برای تجزیه و تحلیل دقت الگوریتم پیشنهادی استفاده می شود.
2. روش ها
روشهای اصلی مورد استفاده در این تحقیق را میتوان به سه بخش عمده تقسیم کرد: نقشهبرداری داخلی، برداشت فضایی و PDR که هر کدام در یکی از بخشهای زیر توضیح داده شدهاند. بخش اول روشهای نگاشت مورد استفاده و مکانهای استفاده از آنها را توضیح میدهد و شامل یک بررسی سنتی برای نقاط چک و نقشهبرداری موبایل برای تولید سریع تصاویر با ارجاع جغرافیایی است. استفاده از فناوری IMMS بسیار پیچیده است و به یکپارچه سازی GNSS/INS و ارجاع جغرافیایی مستقیم مربوط می شود. ارجاع مستقیم جغرافیایی تکنیکی است که می تواند برای فتوگرامتری استفاده شود [ 29]. ارجاع جغرافیایی به این معنی است که سیستم مختصات یک نقشه یا تصویر را می توان به یک سیستم مختصات زمینی مرتبط کرد. بنابراین، مختصات زمین یک نقطه جالب در یک تصویر را می توان به طور مستقیم اندازه گیری کرد، و اطلاعات مکانی را می توان بیشتر استخراج کرد. بنابراین، بخش اول فقط توضیح مختصری از روش نقشه برداری، دقت و مشخصات سیستم اعمال شده ارائه می دهد. بخش دوم مفهوم و روش تحلیل برداشتن فضایی را نشان می دهد. تجزیه و تحلیل شامل سناریوهای مختلف برای ارزیابی اثر IOPs و هندسه مختلف نقاط کنترل است. سپس، روش حداقل مربعات وزنی بهینه برداشت فضا برای یک دوربین تلفن هوشمند کالیبره نشده را می توان تعیین کرد. بخش سوم الگوریتم PDR مورد استفاده را نشان می دهد.
2.1. نقشه برداری داخلی
سهم نقشه برداری داخلی در این تحقیق شامل تولید تصاویر ارجاع جغرافیایی با مختصات مطلق برای برداشت فضا و تجزیه و تحلیل دقت الگوریتم پیشنهادی است. در این تحقیق از دو روش نقشه برداری داخلی، نقشه برداری پیمایشی و نقشه برداری سیار استفاده شده است. آزمایشگاه کالیبراسیون دوربین حرفه ای باید دارای مختصات دقیق نقاط کنترل باشد تا تجزیه و تحلیل برداشت فضا بتواند بر روی اثرات مختلف IOP ها و هندسه نقاط کنترل متمرکز شود. برای انجام این کار، یک بررسی سنتی از کل ایستگاه با دقت در سطح سانتی متر به منظور به حداقل رساندن خطای نقطه کنترل انجام می شود. همچنین تمامی نقاط چک مورد استفاده توسط ایستگاه کل در این تحقیق بررسی شده است.
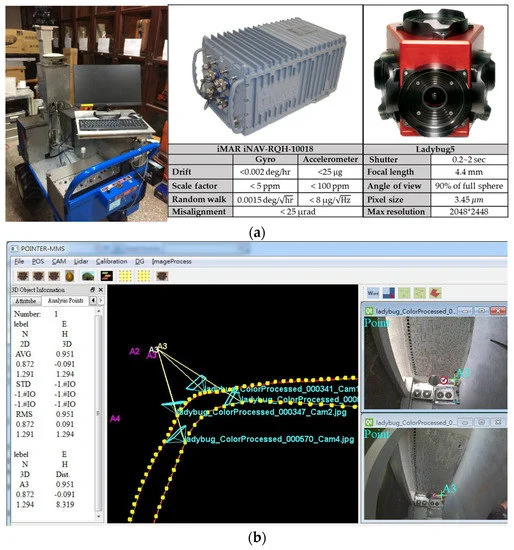
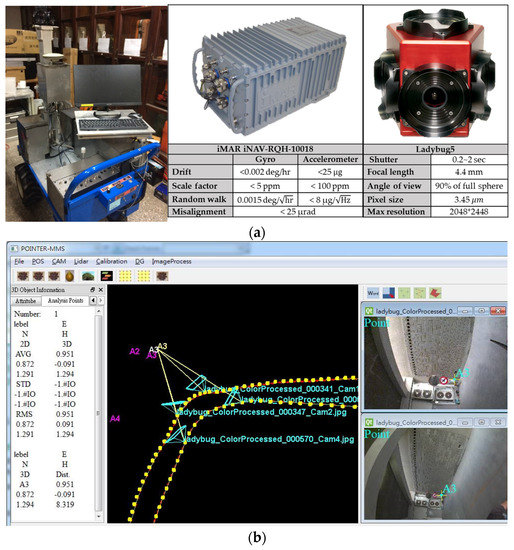
از آنجایی که یک بررسی سنتی برای تصاویر ارجاع داده شده جغرافیایی می تواند بسیار وقت گیر باشد، بسته به تعداد کل نقاط کنترل، IMMS برای جمع آوری سریع تصاویر محیطی و سپس تعداد دلخواه نقاط کنترل، که به راحتی قابل اندازه گیری است، توسعه یافته است. این روش با استفاده از نوعی فناوری فتوگرامتری به نام ارجاع جغرافیایی مستقیم انجام می شود. ارجاع مستقیم جغرافیایی مستلزم موقعیت و نگرش دقیق دوربین است. برای انجام این کار، از نرمافزار توسعهیافته برای تخمین دقیق مسیر IMMS بر اساس فیلتر Extend Kalman (EKF)، الگوریتمهای محدودیت محدودیت غیرهولونومیک (NHC) و بهروزرسانی سرعت صفر (ZUPT) و Rauch-Tung استفاده شد. -Striebel (RTS) صاف تر. از آنجایی که در این تحقیق از سه KF مختلف استفاده شده است، EKF مورد استفاده برای IMMS برای تمایز در این تحقیق MEKF نامیده می شود. در همین حال، حتی عملیات ماتریسی مرحله پیشبینی و بهروزرسانی یکسان است. ماتریس های مرتبط هنوز متفاوت هستند، مانند ماتریس های بردار حالت آنها. در روش نگاشت، یک محیط بزرگ فاقد GNSS فضای سختی برای یک سیستم یکپارچه سازی INS/GNSS است، حتی با استفاده از MEKF، هموارسازی، NHC و ZUPT. بنابراین، با توجه به مشخصات INS مورد استفاده، سرعت خودرو و تجربه گذشته، برخی از نقاط کنترل توسط کل ایستگاه هر 200 متر بررسی می شود. این نقاط کنترل در یک تصویر برای برداشتن فضایی اندازهگیری میشوند، سپس موقعیت و نگرش IMMS را میتوان برای بهروزرسانی راهحل MEKF در آن دوره تخمین زد. IMMS در خارج از منزل راهاندازی شد و دو دایره کوچک را حرکت داد تا MEKF قبل از ورود به میدان آزمایشی داخل ساختمان پایدار باشد. در محیط داخلی، مسیر IMMS را می توان به طور دقیق برای ارجاع جغرافیایی تخمین زد. اطلاعات مربوط به نرم افزار را می توان در تحقیقات قبلی ما یافت [31 ]. با توجه به اجزای سیستم، IMMS توسعه یافته توسط دانشگاه ملی چنگ کونگ (NCKU) یک سیستم یکپارچه سازی INS/GNSS است که از GNSS، واحد اندازه گیری اینرسی درجه ناوبری (IMU)، یک سیستم دوربین کروی 360 درجه، منبع تغذیه و یک کامپیوتر صنعتی، همانطور که در شکل 2 نشان داده شده است . سیستم های مشابه را می توان در [ 32 ، 33 ، 34 ] یافت . دومین نرم افزار خود توسعه یافته برای تولید تصاویر ارجاع جغرافیایی با مختصات TWD97، همانطور که در شکل 2 ب نشان داده شده است، استفاده می شود. دقت تصاویر ارجاع جغرافیایی تولید شده 1.03 متر (ریشه میانگین مربعات خطا، RMSE) در زمینه آزمایش بر اساس 39 نقطه چک می باشد.
2.2. برداشت فضایی
برداشت فضایی بر اساس معادلات هم خطی است. یک اصل مهم این است که نقطه شی، نقطه تصویر مربوطه و دوربین به صورت هم خط باشند. معادلات همخطی با پارامترهای اضافی در معادلات (1) و (2) نشان داده شده است:
جایی که ( Xآ، یآ، زآ)(�آ،�آ،زآ)مختصات زمین نقطه جسم A است . ماتریس m یک ماتریس چرخشی سه بعدی است که شامل عناصر متشکل از سه زاویه نگرش است: امگا، فی و کاپا. ( XL، یL، ز L)(��,��، ز�)مختصات زمینی دوربین است. سه زاویه نگرش و محل دوربین از عناصر EOP هستند. ( xآ، yآ)(ایکسآ،�آ)مختصات تصویر اندازه گیری شده نقطه جسم A است . ( xپ، y پ)(�پ، �پ)و ججبه ترتیب نقطه اصلی و فاصله اصلی دوربین هستند که IOP ها را تشکیل می دهند. علاوه بر این، IOPهای تعمیم یافته شامل پارامترهای اضافی هستند: Δ xΔایکسو Δ yΔ�که نشان دهنده خطای سیستم دوربین مانند اعوجاج لنز است.
برداشتن فضایی، EOP های دوربین گوشی هوشمند را به عنوان مکان کاربر تخمین می زند. هر نقطه شی با مختصات زمین شناخته شده به عنوان یک نقطه کنترل عمل می کند و امکان ساخت دو معادله بر اساس معادلات همخطی را فراهم می کند. بنابراین، حداقل سه نقطه کنترل برای حل EOP های ناشناخته (شش پارامتر) مورد نیاز است. در همین حال، نقاط کنترل بیشتری به عنوان اندازه گیری اضافی برای تخمین بهتر توسط حداقل مربعات مورد نیاز است. با این حال، رابطه بین مشاهدات و مجهولات غیرخطی است، بنابراین لازم است معادلات با استفاده از قضیه تیلور خطی شوند. سپس از معادلات همخطی می توان برای استخراج مشتقات جزئی با توجه به EOP های ناشناخته استفاده کرد، جایی که شکل دقیق آن را می توان یافت [ 29]]. بنابراین، به دلیل استفاده از معادلات خطی شده، مقادیر اولیه EOPهای ناشناخته برای محاسبات تکراری مورد نیاز است. مقادیر اولیه EOPها از نظر نگرش و موقعیت به ترتیب توسط حسگر جهتگیری و الگوریتم PDR در تحقیقات داخلی ما ارائه شدهاند. یک مورد خاص اولین مکان در ابتدای ناوبری است که به دلیل موقعیت نسبی مشخصه آن توسط PDR قابل ارائه نیست. بنابراین، مکان اولیه در فضای باز ارائه شده توسط GNSS مورد نیاز است. مقادیر اولیه موقعیت در سیستم مختصات زمین برای برداشتن فضایی است. با این حال، نگرش از سنسور جهت در یک قاب تلفن است، همانطور که در سمت چپ شکل 3 نشان داده شده است.. هنگامی که کاربر تصویر را می گیرد، نگرش ارائه شده توسط حسگر جهت گیری نسبت به قاب سطح محلی (شمال، شرق، پایین) است. علاوه بر این، مقادیر اولیه زوایای چرخش مربوط به سه محور قاب دوربین برای برداشتن فضا مورد نیاز است، همانطور که در سمت راست شکل 3 نشان داده شده است . بنابراین برای تعیین سه زاویه چرخش بر اساس سنسور جهتیابی به معادلات زیر نیاز است:
جایی که آرسℛسماتریس چرخش سه بعدی گوشی هوشمند در قاب سطح محلی است. آرایکسℛایکس، آرyℛ�و آرzℛ�ماتریس های چرخشی مربوط به محورهای x، y و z گوشی هوشمند هستند. α�، β�و γ�رول، زمین و سر به ترتیب توسط حسگر جهت گیری داده شده است. هنگامی که کاربر عکس می گیرد (محور y به سمت چپ کاربر نشان داده شده است)، عنوان به 90 درجه اضافی نیاز دارد زیرا عنوان سنسور نسبت به محور y است. آرپℛپماتریس چرخش سه بعدی قاب دوربین است. rمن ج���عنصر ماتریس چرخش است. آرx ‘ℛ�‘، آرy‘ℛ�‘و آرz‘ℛ�‘ماتریس های چرخشی مربوط به محورهای x’، y’ و z’ در قاب دوربین هستند. ω�، φ�و κ�زوایای چرخش مربوط به محورهای x’، y’ و z’ هستند. بنابراین می توان امگا، فی و کاپا را بر اساس تابع مثلثاتی معکوس تخمین زد. rمن ج�من�و تعاریف مربوطه در ماتریس کسینوس جهت (DCM). جزئیات را می توان در [ 29 ] یافت . در نهایت مقادیر اولیه لازم برای برداشتن فضایی به طور کامل به دست می آید.
علاوه بر این، هندسه تقاطع برای برداشتن فضا مهم است. شکل 4 تفاوت بین هندسه تقاطع خوب و بد را نشان می دهد که در آن نقاط قرمز و آبی دو نقطه کنترل فرض می شوند. دایره نشان دهنده فاصله بین نقطه تقاطع و نقطه کنترل است و ضخامت دایره نشان دهنده محدوده خطای فاصله است. به عبارت دیگر، تفاوت بین دو دایره با یک رنگ نشان دهنده خطای فاصله است. منطقه تقاطع دو نقطه کنترل، محل احتمالی یک نقطه تقاطع را نشان می دهد. هر چه مساحت بزرگتر باشد، نقطه تقاطع نامشخص تر است. در شکل 4، فاصله بین دو نقطه کنترل مثال در سمت چپ بزرگتر از مثال سمت راست است که نشان دهنده زاویه تقاطع و هندسه بهتر است. بنابراین، سطح تقاطع مثال سمت چپ کوچکتر از قسمت سمت راست است. عدم قطعیت محل نقطه تقاطع نیز کوچکتر و تقریباً در هر جهت یکسان است. در مقابل، سطح تقاطع شکل سمت راست بزرگتر است، که نشان دهنده عدم قطعیت تقاطع بزرگتر است. در نتیجه، مقادیر رقت دقیق (DOP) مورد سمت چپ کوچکتر از مورد سمت راست است. به همین دلیل، تحلیل هندسه تقاطع بر اساس دقت موقعیت و DOP در بخش نتایج مورد بحث قرار گرفته است.
تجزیه و تحلیل برداشت فضایی با استفاده از تصاویر دو نوع دوربین گوشی هوشمند انجام شده است. آزمایشگاه کالیبراسیون دوربین حرفه ای دارای یک دیوار با نشانه های مصنوعی است، همانطور که در شکل 5 نشان داده شده است; نقاط کنترل توسط کل ایستگاه با دقت در سطح سانتی متر بررسی شده است. نتایج تحقیق حاضر نشان میدهد که مکان نقطه کنترل منجر به مشارکتهای متفاوتی برای برداشتن فضا میشود، که منجر به این گزاره میشود که روش حداقل مربع وزنی تطبیقی منجر به تخمین دقیقتر برداشت فضا بر اساس فاصله بین نقاط تصویر و نقطه اصلی میشود. به منظور درک چگونگی تعیین وزن هر نقطه تصویر مربوط به فاصله، از رگرسیون برازش منحنی چند جملهای کوارتیک استفاده میشود. سپس، وزن بهینه هر نقطه تصویر را می توان برای دوربین گوشی هوشمند (در حد مصرف کننده) تعیین کرد و دقت برداشتن فضا بدون کالیبراسیون دوربین بهبود می یابد.
2.3. محاسبه مردگان عابر پیاده
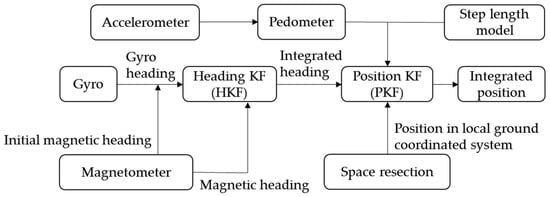
علاوه بر برداشتن فضایی، جزء دیگر الگوریتم پیشنهادی PDR است. معماری استفاده از برداشتن فضا به عنوان منبع کمکی خارجی برای PDR در شکل 6 نشان داده شده است . دو فیلتر کالمن (KF) وجود دارد، یکی برای سرفصل و دیگری برای تخمین موقعیت. عنوان KF (HKF) و موقعیت KF (PKF) برای تمایز در این تحقیق استفاده شده است.
گام شمار مورد استفاده برای تشخیص اوج آستانه به همراه فاصله زمانی برای شناسایی مراحل تنظیم شده است. علاوه بر گام شمار، داده های تولید شده برای HKF بر اساس دو نوع عنوان هستند که به ترتیب توسط مغناطیس سنج و ژیروسکوپ محاسبه می شوند. عنوان ارائه شده توسط ژیروسکوپ نیاز به یک عنوان اولیه از مغناطیس سنج دارد. ویژگی های ژیروسکوپ صاف و مستقل از محیط است و در نتیجه خطاهایی به سرعت در طول زمان جمع می شوند. از طرف دیگر، عنوان مغناطیسی تحت تأثیر محیط قرار می گیرد، که باعث می شود اندازه گیری عنوان ناهموار اما بدون خطای انباشته شود. با در نظر گرفتن این تفاوت ها، HKF هدینگ یکپارچه و بایاس ژیروسکوپ را تخمین می زند، و مزایای هر دو را برای به دست آوردن یک عنوان صاف و کاهش رانش خطا ترکیب می کند.
جایی که ایکساچکافک�����بردار حالت HKF در دوره k است. δ ψ��خطای عنوان است. δ ب��خطای ژیروسکوپ بایاس است. wاچکافک�����نویز سیستم ژیروسکوپ است (فرض می شود که یک توزیع گاوسی است). ساچکافک�����ماتریس کوواریانس نویز سیستم ژیروسکوپ است. Φاچکافk − 1Φ�−1���ماتریس انتقال HKF است که نشاندهنده رابطه بین حالات در دورههای k و k-1 است. پاچکافk − 1��−1��افماتریس کوواریانس بردار حالت HKF است. در مرحله بعد، مرحله به روز شده HKF به شرح زیر است:
جایی که کاچکافکککاچکافسود کالمن HKF است. اچاچکافاچاچکافماتریس طراحی HKF برای اندازه گیری است. آراچکافکآرکاچکافماتریس کوواریانس اندازه گیری در دوره k است. ایکس^اچکافکایکس^کاچکافبردار حالت به روز شده HKF در دوره k است. zاچکافک�کاچکافمدل مشاهده HKF است که تفاوت بین عنوان مغناطیسی است آمترآمترو ژیروسکوپ آgآ�در دوران k با استفاده از این سیستم، PDR موقعیت را بر اساس عنوان یکپارچه از HKF تخمین می زند. علاوه بر این، طول گام استفاده شده از یک فرمول تجربی است که عملکرد بهتری دارد. معادله زیر است:
در این معادله، Lک�کطول گام k گام است. a ، b و c پارامترهای تنظیم هستند. H قد کاربر است. و افکافکفرکانس راه رفتن است که در k گام تخمین زده می شود. با این حال، کمک های خارجی مانند برداشتن فضایی به منظور کاهش تجمع خطای PDR و همچنین جلوگیری از تنظیم مدل استفاده می شود. بنابراین، پارامترهای ( a ، b و c ) در رابطه (11) مقادیر پیشفرض هستند که همان مرجع [ 35 ] هستند. چن و همکاران این پارامترها را از اندازه گیری های گرفته شده از 33 سناریو پیاده روی با استفاده از 11 نفر تعیین کرد. ما همچنین فرمول های تجربی مختلف را در تحقیقات گذشته مقایسه کردیم [ 9 ] و این فرمول عملکرد بهتری دارد. برای PKF، بردار حالت و ماتریس انتقال در معادلات زیر نشان داده شده است:
جایی که ایکسپکافکایکسکپکافبردار حالت PKF است. اچپکافاچپکافماتریس طراحی PKF برای اندازه گیری است. zپکافک�کپکافمدل مشاهده PKF است، که تفاوت بین موقعیت برداشتن فضایی و PDR در دوره k است. Eاس آرک�کس�و Ep drک�کپد�مختصات شرقی برداشت فضایی و PDR به ترتیب هستند. ناس آرکنکس�و نp drکنکپد�به ترتیب مختصات شمالی برداشت فضایی و PDR هستند. آرپکافکآرکپکافماتریس کوواریانس اندازه گیری در دوره k است. Φپکافk − 1Φک–1پکافماتریس انتقال PKF است. L طول گام است. ϑ�و η�بسط سری تیلور مرتبه دوم برای توابع سینوس و کسینوس هستند. بE، ک ب�، کافست برای شرق است. بن، ک بن، کافست شمال است. بل ، ک ب�، کتعصب طول گام است. و k k استگام. عملیات ماتریسی مراحل پیش بینی و به روز رسانی PKF همانند HKF است. PKF برای تخمین موقعیت یکپارچه از برداشت فضایی و PDR استفاده می شود. معادله نوآوری بر اساس تفاوت بین موقعیت های PDR و برداشتن فضایی است. به عبارت دیگر، موقعیت تخمین زده شده توسط برداشت فضایی برای به روز رسانی PKF استفاده می شود. همانطور که در این معادلات نشان داده شده است، برداشت فضای پیشنهادی به تخمین PDR از مکان و سمت کاربر بر اساس سنسورهای اینرسی و دوربین گوشی هوشمند کمک می کند. اگرچه خطاهای PDR ناشی از گام شمار، طول گام و تخمین سرفصل وجود دارد، اما به منظور تأکید بر اثر یکپارچه سازی، الگوریتم PDR پیچیده نیست و نیازی به کالیبراسیون و پارامترهای تنظیم برای کاربران فردی و محیط ندارد. هنگامی که تصویر گرفته شد، راه حل برداشتن فضا به عنوان محدودیت برای PDR با تنظیم مجدد خطای انباشته عمل می کند، در همین حال PDR مقادیر اولیه را برای برداشتن فضای بعدی ارائه می دهد. در نهایت، کاربر تلفن هوشمند می تواند به راحتی در داخل خانه حرکت کند.
3. نتایج و بحث
بخش های زیر نتایج تجزیه و تحلیل برداشت فضا و الگوریتم یکپارچه پیشنهادی را ارائه می دهد. گوشی های هوشمند مورد استفاده عبارتند از HTC M8 (HTC Inc.، New Taipei City، Taiwan) و iPhone 5S (Apple Inc.، Cupertino، CA، USA). مشخصات رسمی این دوربین های گوشی های هوشمند در جدول 1 نشان داده شده است . تجزیه و تحلیل برداشتن فضا در یک آزمایشگاه کالیبراسیون دوربین حرفه ای انجام شد. PDR با کمک برداشت فضایی پیشنهادی در پارکینگ زیرزمینی اجرا میشود که توسط IMMS نقشهبرداری شده است.
3.1. تجزیه و تحلیل برداشت فضایی با استفاده از گوشی هوشمند
دوربین گوشی هوشمندی که در 4 متری جلوی مرکز دیوار قرار دارد، برای آزمایشهای زیر تصاویر افقی گرفت. ارتفاع دوربین گوشی هوشمند توسط یک سه پایه در حدود 1.5 متر تنظیم شد. پس از گرفتن تصاویر، برداشت فضایی از نقاط کنترل با زوایای تقاطع مختلف و تعداد نقاط کنترل برای ارزیابی تأثیر آنها بر اساس خطای موقعیت و DOPها استفاده کرد. جهت شمال/جنوب، شرق/غرب و ارتفاع با عمق، x و y تصویر در این زمینه مطابقت دارد. بنابراین، شرق و ارتفاع دارای ویژگی های مشابهی هستند که هر دو موازی با صفحه تصویر هستند. با این حال، آنها همچنین دارای تفاوت هایی هستند زیرا زوایای تقاطع محدوده افقی (جهت شرقی) و عمودی (ارتفاع) به دلیل جهت گیری تصویر متفاوت است. علاوه بر این، جهت شمال مربوط به عمق است، که ویژگی های متفاوتی نسبت به بقیه دارد. نتایج نشاندهنده دقت و تأثیر دوربینهای تلفن هوشمند کالیبرهنشده برای برداشتن فضایی است، سپس راههایی را برای بهبود نشان میدهد.
3.1.1. زاویه تقاطع
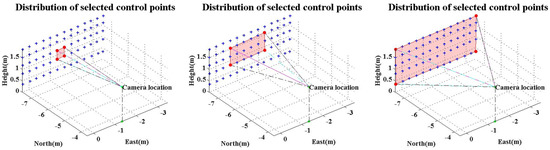
نقاط کنترلی مورد استفاده برای ارزیابی تأثیر زوایای تقاطع که از 5 تا 52 درجه افقی متغیر است، به صورت نقاط قرمز رنگ در شکل 7 نشان داده شده است . جدول 2 و جدول 3 به ترتیب خطاهای موقعیت را در زوایای تقاطع مختلف با استفاده از iPhone و HTC نشان می دهند. زوایای تقاطع افقی در ستون دوم و زوایای تقاطع عمودی در پرانتز در کنار زاویه تقاطع افقی نشان داده شده اند. جدول 2 و جدول 3همچنین خطاهای موقعیت را برای سه مورد که از مقادیر مختلف IOP استفاده می کنند نشان می دهد. مورد اول از برداشتن فاصله با IOP های کالیبره نشده استفاده می کند، به این معنی که فاصله اصلی توسط یک فایل تصویری ارائه می شود و بقیه صفر فرض می شوند. مورد دوم از فاصله اصلی کالیبره شده و تغییر نقطه اصلی استفاده می کند، در حالی که مورد سوم از پارامترهای اضافی مانند اصلاح اعوجاج لنز استفاده می کند. این موارد به دلایل و مفروضات متعددی طراحی شده اند. برای فرض مورد اول، به دست آوردن IOPهای کالیبره شده با کالیبراسیون برای کاربران عمومی دشوار است و سازندگان مشخصات دقیق دوربین گوشی هوشمند خود را اعلام نمی کنند. برای فرض مورد دوم، کاربران می توانند فاصله اصلی ثبت شده در یک فایل تصویری را به دست آورند (حتی در حال حاضر نادرست است اما انتظار می رود در آینده دقیق تر باشد). در نهایت مورد سوم برای کاربردهای حرفه ای با IOPهای کالیبره شده کامل طراحی شده است. بنابراین، این موارد برای مقایسه عملکرد در موقعیتهای مختلف تنظیم شدهاند.
از آنجایی که نتایج برداشت فضایی در جهات مختلف با یکدیگر همبستگی بالایی دارد، مقایسه RMSE همه جهات جامعتر است. مقایسه بین RMSE مورد اول و دوم، بهبود قابل توجهی را پس از استفاده از فاصله اصلی کالیبره شده نشان می دهد. علاوه بر این، مقایسه بین RMSE مورد دوم و سوم به دلیل استفاده از IOPهای کاملاً کالیبره شده که دارای تصحیح اعوجاج لنز هستند، بهبود جزئی را نشان می دهد. واضح است که خطای ناشی از فاصله اصلی نادرست بزرگتر از خطای ناشی از اصلاح اعوجاج لنز است. علاوه بر این، RMSE های مورد اول در رابطه با فواصل اصلی دو گوشی هوشمند تأثیر معکوس نشان می دهند. این به دلیل تفاوت بین فاصله اصلی ضبط و فاصله اصلی کالیبره شده این دو گوشی است: یکی مثبت و دیگری منفی (فاصله اصلی کالیبره شده آیفون و HTC به ترتیب 4.19 و 3.79 میلی متر است، اما مقادیر ضبط هر دو 4 میلی متر). RMSE های کیس دوم به طور قابل توجهی بهتر از مورد اول هستند و ویژگی های یکسانی برای هر دو گوشی هوشمند دارند زیرا فاصله های اصلی دقیق تر به طور همزمان استفاده می شود. با این حال، RMSE های زاویه تقاطع افقی 23 درجه بهترین هستند، زیرا زاویه تقاطع کوچکتر هندسه تقاطع ضعیف تری دارد و زاویه تقاطع بزرگتر از نقاط کنترلی با اعوجاج عدسی بزرگتر استفاده می کند. نقاط کنترل با زوایای تقاطع بزرگتر از نقطه اصلی فاصله دارند، که در اصل دارای اعوجاج لنز بزرگتر است. بنابراین، RMSE های مورد سوم در زوایای تقاطع بزرگ بسیار بهتر از موارد دیگر به دلیل اصلاح اعوجاج لنز است. در نتیجه، فاصله اصلی، اعوجاج لنز و زاویه تقاطع به طور جدی بر عملکرد برداشتن فضا تأثیر میگذارد و اهمیت از بالا به پایین، فاصله اصلی، اعوجاج لنز و زاویه تقاطع است. با این حال، دقت برداشتن فضا بدون هیچ IOP کالیبره شده هنوز برای ناوبری داخلی عابر پیاده که در آن دقت مورد نیاز فقط در سطح متر است قابل قبول است. اعوجاج لنز و زاویه تقاطع به طور جدی بر عملکرد برداشتن فضا تأثیر می گذارد و اهمیت از بالا به پایین فاصله اصلی، اعوجاج لنز و زاویه تقاطع است. با این حال، دقت برداشتن فضا بدون هیچ IOP کالیبره شده هنوز برای ناوبری داخلی عابر پیاده که در آن دقت مورد نیاز فقط در سطح متر است قابل قبول است. اعوجاج لنز و زاویه تقاطع به طور جدی بر عملکرد برداشتن فضا تأثیر می گذارد و اهمیت از بالا به پایین فاصله اصلی، اعوجاج لنز و زاویه تقاطع است. با این حال، دقت برداشتن فضا بدون هیچ IOP کالیبره شده هنوز برای ناوبری داخلی عابر پیاده که در آن دقت مورد نیاز فقط در سطح متر است قابل قبول است.
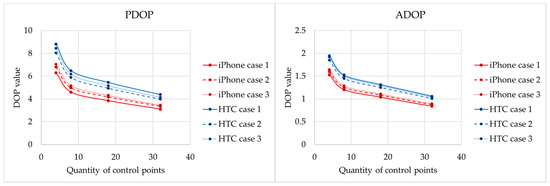
علاوه بر خطای موقعیت، DOPها عمدتاً به زاویه تقاطع در این تحلیل وابسته هستند، همانطور که در شکل 8 نشان داده شده است . مقادیر PDOP حدود 6، 27 و 127 برای آیفون و 8، 35 و 180 برای گوشی HTC هستند که به ترتیب با 52، 23 و 5 درجه زاویه تقاطع مطابقت دارند. مقادیر ADOP حدود 2، 7 و 34 برای آیفون و 2، 9 و 47 برای گوشی HTC هستند که به ترتیب با 52، 23 و 5 درجه زوایای تقاطع مطابقت دارند. هر چه زوایای تقاطع بزرگتر باشد، مقادیر DOP به میزان قابل توجهی کاهش می یابد. با این حال، زاویه تقاطع تنها عاملی نیست که بر دقت موقعیت تأثیر می گذارد. حتی اگر همه IOPهای کالیبره شده استفاده شوند، DOPهای بهتر به طور خودکار باعث دقت موقعیت بهتر نمی شوند، همانطور که در جدول 2 و نشان داده شده است. جدول 3 نشان داده شده است.. با این حال، DOP ها هندسه بهتری را برای محاسبه تکراری و شرایط همخطی نشان می دهند، که باعث عدم قطعیت کمتر برای همگرایی می شود.
3.1.2. تعداد نقاط کنترل
علاوه بر زاویه تقاطع، کمیت نقاط کنترل نیز یک عامل مهم است زیرا ممکن است همیشه ویژگی های کافی در محیط ناوبری وجود نداشته باشد. به منظور ارزیابی تأثیر تعداد نقاط کنترل برای برداشتن فضایی، در این تحلیل از تعداد نقاط کنترل متفاوتی استفاده شده است. آزمایش ها با 4، 8، 18 و 32 نقطه کنترل انجام شد که همه به طور مساوی روی تصویر توزیع شده اند، همانطور که در شکل 9 نشان داده شده است.. انتظار می رود که اینها تأثیر زاویه تقاطع و هندسه را حذف کنند. همه شرایط مانند جهت، فاصله تصویربرداری و تنظیم Case 1 تا Case 3 مانند تست های قبلی است. بنابراین، بردارهای شمال، شرق و ارتفاع با جهات عمق، x و y تصویر مطابقت دارند. موارد مختلف کاربردهای متفاوتی از IOPهای کالیبره شده دارند. جدول 4 و جدول 5خطاهای موقعیت مربوط به تعداد مختلف نقاط کنترل را در سه مورد نشان دهید. مقایسه RMSE مورد اول و دوم به وضوح بهبود قابل توجهی را به دلیل استفاده از فاصله اصلی کالیبره شده نشان می دهد. علاوه بر این، مقایسه RMSE بین حالت دوم و سوم نیز به دلیل اصلاح اعوجاج لنز کمی بهبود یافته است. با این حال، هنگامی که از نقاط کنترل بیشتری استفاده می شود، هیچ پیشرفت قابل توجهی وجود ندارد. مقایسه بین تمام موارد نشان می دهد که صرف اضافه کردن نقاط کنترل، خطای ناشی از IOP های نادرست را کاهش نمی دهد. بنابراین، DOP ها بیشتر مورد تجزیه و تحلیل قرار می گیرند.
شکل 10مقادیر PDOP و ADOP را برای دو گوشی هوشمند نشان می دهد. هنگامی که نقاط کنترل بیشتری استفاده می شود، مقادیر DOP بهتری به دست می آید. با این حال، دقت موقعیت زمانی که DOP ها کوچکتر می شوند، هیچ پیشرفت قابل توجهی نشان نمی دهد زیرا هندسه تقاطع تنها با چهار نقطه کنترل به اندازه کافی خوب است (DOP ها در حال حاضر به اندازه کافی کوچک هستند، و نقاط کنترل بیشتر فقط کمی DOP ها را بهبود می بخشند). این نشان می دهد که چند نقطه کنترل استفاده شده در این تحلیل برای هندسه خوب تقاطع کافی است که با موفقیت جواب را با عدم قطعیت کمتر تخمین می زند. بنابراین، نقاط کنترل بیشتر تنها زمانی معنادار می شوند که نقاط اضافه شده بتوانند به طور قابل توجهی زاویه تقاطع و هندسه را برای کاربرد عملی بهبود بخشند. با این حال، نقاط کنترل بیشتر نیز مشاهدات اضافی بیشتری را برای حداقل مربعات نشان می دهد، که قابلیت اطمینان تخمین را بهبود می بخشد.
3.1.3. حداقل مربعات وزنی تطبیقی
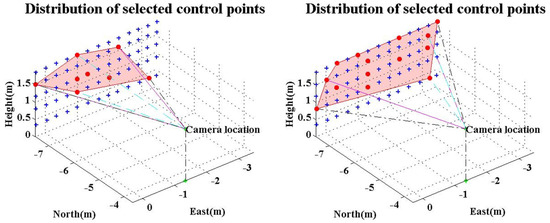
با توجه به تجزیه و تحلیل های فوق، IOP دقیق به طور قابل توجهی دقت موقعیت برداشتن فضایی را بهبود می بخشد. فرض مورد 2 یک موقعیت احتمالی برای دوربین گوشی های هوشمند در آینده است که برای آن ضبط فاصله اصلی در فایل تصویر دقیق تر خواهد بود، اما سایر IOP ها مانند اعوجاج لنز هنوز دشوار است. بنابراین، ما یک رویکرد حداقل مربعات وزن تطبیقی برای برداشتن فضا با استفاده از تلفن هوشمند برای کاهش خطای ناشی از اعوجاج لنز پیشنهاد میکنیم، سپس این را در برنامههای موقعیتیابی بعدی اعمال میکنیم. طبق بخش 3.1.1، خطای باقیمانده مورد 2 عمدتاً از اعوجاج لنز پس از اعمال فاصله اصلی کالیبره شده است. خطای موقعیت مورد 2 زمانی بزرگتر می شود که نقاط کنترل استفاده شده از نقطه اصلی دور باشند. این بدان معناست که آن نقاط کنترل زوایای تقاطع بهتری دارند اما با اعوجاج لنز بزرگتر. یافتن بهترین تعادل بین این دو عامل، تخمین بهینه را ارائه میکند و خطای ناشی از اعوجاج لنز را کاهش میدهد و منجر به عدم قطعیت کمتر میشود. شکل 11دو سناریو را برای نقاط کنترل انتخاب شده نشان می دهد. نقاط کنترل انتخاب شده بر اساس فرض توزیع یکنواخت و دارای فواصل مختلف از نقطه اصلی هستند. تجزیه و تحلیل زیر وزن بهینه نقاط کنترل را بر اساس فاصله آنها از نقطه اصلی بدون استفاده از IOPهای کالیبره شده ارزیابی می کند. علاوه بر این، هر گوشی هوشمند برای ارزیابی تکرارپذیری روش پیشنهادی، سه تصویر در زمانهای مختلف میگیرد.
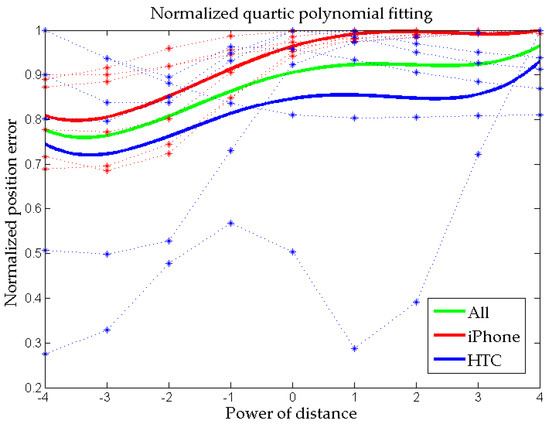
جدول 6 و جدول 7 موقعیت RMSE ها را برای دو سناریو با استفاده از دو گوشی هوشمند نشان می دهد. این سه تصویر توسط هر گوشی هوشمند در زمان های مختلف گرفته شده است. ردیف اول توان فاصله را نشان می دهد که وزن هر نقطه کنترل بستگی به فاصله آن از نقطه اصلی دارد. اگر توان مثبت باشد، به معنای وزن بیشتر نقطه تصویر با فاصله بیشتر بین خود و نقطه اصلی است. اگر توان منفی باشد، به معنای وزن کمتر نقطه تصویر با فاصله بیشتر بین خود و نقطه اصلی است. شکل 12برازش چند جمله ای کوارتتیک وزن بهینه مربوط به توان های مختلف فاصله و خطای موقعیت نرمال شده از جداول را نشان می دهد که مشخصه را به وضوح بیشتر نشان می دهد. خطوط نقطهدار آبی نتایج را برای HTC نشان میدهند و خطوط نقطهدار قرمز نتایج مربوط به آیفون هستند. خطوط ثابت نتایج مناسب مربوط به آیفون، HTC و هر دو را به ترتیب با استفاده از قرمز، آبی و سبز نشان می دهند. نتایج نشان میدهد که هنگام استفاده از دوربینهای گوشیهای هوشمند درجه یک مصرفکننده با IOPهای کالیبره نشده، توان فاصله باید -3 یا -4 برای تخمین بهینه برداشت فضا باشد. این مشخصه با یافتههای تحلیلهای قبلی مطابقت دارد: زاویه تقاطع تأثیر کمتری برای فتوگرامتری فاصله نزدیک با استفاده از دوربین گوشیهای هوشمند دارد، اما نقاط کنترل دورتر باعث اعوجاج بیشتر لنز میشوند. که بر دقت موقعیت تاثیر می گذارد. بنابراین، روش حداقل مربعات وزنی تطبیقی با کاهش اثر اعوجاج لنز، خطای موقعیت را حدود پنج تا ده سانتیمتر بهبود میبخشد. با این حال، دو مورد (تصاویر 1 و 3 HTC) در این نتیجه گیری مطابقت ندارند زیرا خطاهای موقعیت اصلی با وزن برابر بسیار کوچک هستند. این بدان معنی است که این دو مورد قبلاً دقت محدود RMSE را به حدود پانزده سانتی متر بایگانی کرده اند زیرا خطای ناشی از فاصله اصلی نادرست و سایر خطاهای مشاهده ای هنوز باقی مانده است. دو مورد (تصاویر 1 و 3 HTC) در این نتیجه گیری مطابقت ندارند زیرا خطاهای موقعیت اصلی با وزن برابر بسیار کوچک هستند. این بدان معنی است که این دو مورد قبلاً دقت محدود RMSE را به حدود پانزده سانتی متر بایگانی کرده اند زیرا خطای ناشی از فاصله اصلی نادرست و سایر خطاهای مشاهده ای هنوز باقی مانده است. دو مورد (تصاویر 1 و 3 HTC) در این نتیجه گیری مطابقت ندارند زیرا خطاهای موقعیت اصلی با وزن برابر بسیار کوچک هستند. این بدان معنی است که این دو مورد قبلاً دقت محدود RMSE را به حدود پانزده سانتی متر بایگانی کرده اند زیرا خطای ناشی از فاصله اصلی نادرست و سایر خطاهای مشاهده ای هنوز باقی مانده است.
نتیجه گیری نهایی: دو نوع تجزیه و تحلیل هر دو نشان دهنده اهمیت (فهرست شده به ترتیب از بالاترین به پایین ترین) IOPهای کالیبره شده بر اساس دیدگاه دقت موقعیت هستند. در همین حال، زاویه تقاطع و تعداد نقاط کنترل بر DOPها تأثیر می گذارد و نقش مهمی در معادلات همخطی، حداقل مربعات و محاسبه تکراری ایفا می کند که همگی قابلیت اطمینان تخمین ها را افزایش می دهند. هندسه خوب نقاط کنترل نسبت به نقاط کنترل بیشتر مورد استفاده مهم است و تأثیر IOPها از هندسه تقاطع مهمتر است. متأسفانه، کالیبره کردن هر دوربین گوشی هوشمند برای IOP کامل برای یک برنامه جهانی عملی نیست. با این حال، فایل تصویر فاصله اصلی را ثبت می کند و انتظار می رود که ضبط در آینده دقیق تر باشد. از این رو، خطای عمدتاً ناشی از اعوجاج لنز باقی خواهد ماند. روش حداقل مربعات وزنی تطبیقی بر اساس ویژگیهای کشفشده دوربین گوشیهای هوشمند پیشنهاد شده است که زاویه تقاطع و اعوجاج لنز را متعادل میکند. وزن بهینه پس از انجام آزمایشات تعیین شده است. به دلیل افزایش اعوجاج لنز در دوربین های گوشی های هوشمند درجه یک مصرف کننده، وزن نقاط کنترلی که از نقطه اصلی دورتر هستند، باید کوچکتر باشد. پس از اصلاح صحیح وزن، خطای موقعیت برداشتن فضایی حدود ده سانتی متر کاهش می یابد. وزن بهینه پس از انجام آزمایشات تعیین شده است. به دلیل افزایش اعوجاج لنز در دوربین های گوشی های هوشمند درجه یک مصرف کننده، وزن نقاط کنترلی که از نقطه اصلی دورتر هستند، باید کوچکتر باشد. پس از اصلاح صحیح وزن، خطای موقعیت برداشتن فضایی حدود ده سانتی متر کاهش می یابد. وزن بهینه پس از انجام آزمایشات تعیین شده است. به دلیل افزایش اعوجاج لنز در دوربین های گوشی های هوشمند درجه یک مصرف کننده، وزن نقاط کنترلی که از نقطه اصلی دورتر هستند، باید کوچکتر باشد. پس از اصلاح صحیح وزن، خطای موقعیت برداشتن فضایی حدود ده سانتی متر کاهش می یابد.
3.2. PDR با کمک برداشت فضایی پیشنهادی
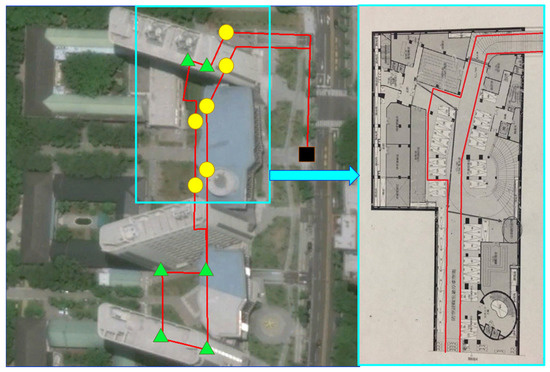
برداشت فضای وزن تطبیقی در حال حاضر برای ادغام با PDR استفاده می شود، بنابراین اثر IOP های نادرست را کاهش می دهد. شکل 13مسیر آزمایشی را نشان می دهد که چهار شرکت کننده با استفاده از دو گوشی هوشمند (iPhone 5S یا HTC M8) طی کرده اند. تلفن را برداشتند و در مسیر آزمایشی قدم زدند. کل مسافت پیاده روی حدود 566 متر بود. مسیر در فضای باز شروع شد و سپس به یک پارکینگ زیرزمینی رفت و در نهایت به موقعیت اولیه بازگشت. شرکت کنندگان A، B، C و D، سه مرد و یک زن به ترتیب با قد 1.70، 1.87، 1.67 و 1.57 متر نامگذاری شدند. جعبه آبی روشن در قسمت جزئی پارکینگ زیرزمینی زوم می کند. مربع سیاه نقطه شروع و پایان را نشان می دهد. مسیر آزمایشی یک مسیر بسته بود. مثلث های سبز روشن نقاط بازرسی هستند که در گوشه ها قرار دارند. برای کاربر سخت است که تلفن هوشمند را در دست بگیرد و حسگرهای دقیق را به منبع تغذیه و رایانه به طور همزمان مجهز کند. بنابراین ایجاد یک مسیر مرجع دقیق بسیار دشوار است. با در نظر گرفتن این موضوع، نقاطی را در گوشه ها به عنوان نقاط چک انتخاب کردیم که به راحتی می توان آنها را در مسیر تخمینی اندازه گیری کرد. نقاط بازرسی توسط کل ایستگاه با دقت در سطح سانتی متر بررسی شد. نقاط زرد مکان هایی هستند که برداشتن فضای وزنی تطبیقی را با دوربین گوشی هوشمند کالیبره نشده اجرا می کنند. به عبارت دیگر، در طول مسیریابی تنها از شش تصویر استفاده شده است. IOPهای کالیبره نشده از فاصله اصلی از فایل تصویر استفاده میکنند و انحراف نقطه اصلی و اعوجاج لنز را صفر فرض میکنند. علاوه بر این، نقاط زرد نیز توسط ایستگاه کل برای تجزیه و تحلیل دقت برداشت فضایی بررسی شد. ما نقاطی را در گوشهها بهعنوان نقاط بازرسی انتخاب کردیم که به راحتی میتوان آنها را در مسیر تخمینی اندازهگیری کرد. نقاط بازرسی توسط کل ایستگاه با دقت در سطح سانتی متر بررسی شد. نقاط زرد مکان هایی هستند که برداشتن فضای وزنی تطبیقی را با دوربین گوشی هوشمند کالیبره نشده اجرا می کنند. به عبارت دیگر، در طول مسیریابی تنها از شش تصویر استفاده شده است. IOPهای کالیبره نشده از فاصله اصلی از فایل تصویر استفاده میکنند و انحراف نقطه اصلی و اعوجاج لنز را صفر فرض میکنند. علاوه بر این، نقاط زرد نیز توسط ایستگاه کل برای تجزیه و تحلیل دقت برداشت فضایی بررسی شد. ما نقاطی را در گوشهها بهعنوان نقاط بازرسی انتخاب کردیم که به راحتی میتوان آنها را در مسیر تخمینی اندازهگیری کرد. نقاط بازرسی توسط کل ایستگاه با دقت در سطح سانتی متر بررسی شد. نقاط زرد مکان هایی هستند که برداشتن فضای وزنی تطبیقی را با دوربین گوشی هوشمند کالیبره نشده اجرا می کنند. به عبارت دیگر، در طول مسیریابی تنها از شش تصویر استفاده شده است. IOPهای کالیبره نشده از فاصله اصلی از فایل تصویر استفاده میکنند و انحراف نقطه اصلی و اعوجاج لنز را صفر فرض میکنند. علاوه بر این، نقاط زرد نیز توسط ایستگاه کل برای تجزیه و تحلیل دقت برداشت فضایی بررسی شد. نقاط زرد مکان هایی هستند که برداشتن فضای وزنی تطبیقی را با دوربین گوشی هوشمند کالیبره نشده اجرا می کنند. به عبارت دیگر، در طول مسیریابی تنها از شش تصویر استفاده شده است. IOPهای کالیبره نشده از فاصله اصلی از فایل تصویر استفاده میکنند و انحراف نقطه اصلی و اعوجاج لنز را صفر فرض میکنند. علاوه بر این، نقاط زرد نیز توسط ایستگاه کل برای تجزیه و تحلیل دقت برداشت فضایی بررسی شد. نقاط زرد مکان هایی هستند که برداشتن فضای وزنی تطبیقی را با دوربین گوشی هوشمند کالیبره نشده اجرا می کنند. به عبارت دیگر، در طول مسیریابی تنها از شش تصویر استفاده شده است. IOPهای کالیبره نشده از فاصله اصلی از فایل تصویر استفاده میکنند و انحراف نقطه اصلی و اعوجاج لنز را صفر فرض میکنند. علاوه بر این، نقاط زرد نیز توسط ایستگاه کل برای تجزیه و تحلیل دقت برداشت فضایی بررسی شد.
جدول 8 و جدول 9 دقت برداشتن فضا را در این زمینه نشان می دهد (نقاط زرد در شکل 13) با تصاویر ارجاع جغرافیایی ارائه شده توسط IMMS. خطاهای نشان داده شده در جداول نشان دهنده RMSE شش نقطه چک برای جهت شرق/غرب و شمال/جنوب است. خطای افقی مقدار RMS RMSE شرقی و شمالی است. چون در سیستم پیشنهادی قد و نگرش در نظر گرفته نمی شود، بحثی به آن نمی شود. دقت برداشت فضایی در این زمینه حدود یک متر است که به طور قابل توجهی بدتر از دقت در آزمایشگاه کالیبراسیون دوربین است. این به این دلیل است که مختصات زمین مورد استفاده توسط تصاویر ارجاع جغرافیایی اندازه گیری شد. به عبارت دیگر، تصاویر ارجاع جغرافیایی ارائه شده توسط IMMS نسبت به بررسی سنتی (شرایط آزمایشگاهی) دقت کمتری دارند. علاوه بر این، نامزدها برای نقاط کنترل در پارکینگ های زیرزمینی نادر هستند، بنابراین نمی توانند بهترین هندسه تقاطع را ارائه دهند. باعث پایایی ضعیف و خطاهای تخمینی می شود. با این حال، دقت یک متر برای PDR قابل قبول و موثر است، زیرا دقت الگوریتم مستقل PDR به طور قابل توجهی بدتر است، به خصوص بدون کالیبراسیون مدل، تنظیم پارامتر یا سنسورهای دقیق. هر دو مرحله از دست رفته PDR می تواند خطای بیش از یک متر ایجاد کند.
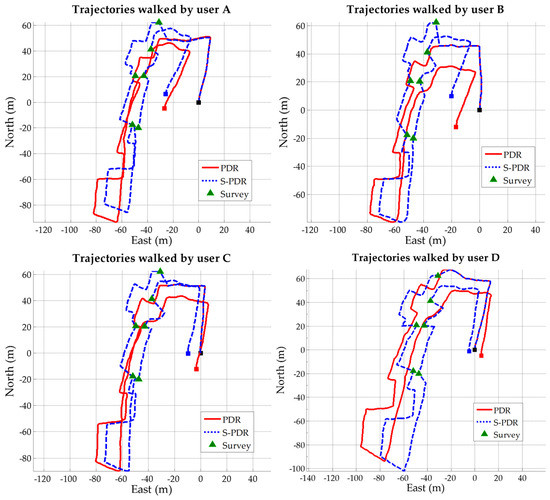
شکل 14 و شکل 15 به ترتیب مسیرهای تخمینی چهار شرکت کننده را با استفاده از iPhone 5S و HTC M8 نشان می دهد. سیستم مختصات TWD97 است که می تواند به راحتی به سیستم جهانی ژئودتیک 1984 (WGS84) تبدیل شود. با این حال، تمام راه حل های مسیر منهای مختصات مختصات مکان شروع برای یک تصویر واضح هستند. PDR با کمک برداشت فضایی پیشنهادی در شکل ها و جداول زیر S-PDR نام دارد. مثلث سبز تیره (همان مثلثهای سبز روشن و نقاط زرد در شکل 13).) نشان دهنده مکان واقعی بررسی شده توسط کل ایستگاه است که به عنوان مرجع برای مقایسه استفاده می شود. خط قرمز نشان دهنده مسیر تخمین زده شده توسط الگوریتم PDR با گام شمار با استفاده از تشخیص اوج آستانه به همراه فواصل زمانی، طول گام فرموله شده تجربی و یک عنوان یکپارچه بر اساس داده های ژیروسکوپ و مغناطیس سنج است. خط نقطه آبی نشان دهنده مسیر تخمین زده شده توسط PDR به کمک برداشت فضایی است. مربع های قرمز و آبی به ترتیب مکان های انتهایی PDR و PDR به کمک برداشتن فضایی هستند. مربع سیاه نقطه شروع هر دو مسیر است. مسیرهای دو الگوریتم در ابتدا با هم همپوشانی دارند و پس از اولین به روز رسانی برداشتن فضایی متفاوت می شوند. به منظور ارزیابی بهبود الگوریتم پیشنهادی و بررسی اینکه آیا واقعاً عملی تر است، تمام پارامترهای استفاده شده از PDR مقادیر پیش فرض هستند. بنابراین، خطای موقعیت ناشی از طول گام و تعداد گام آشکار است زیرا پارامترهای مربوطه تنظیم نشده اند.
جدول 10درصد خطای بسته شدن حلقه را برای تحلیل مسیرهای فوق نشان می دهد. درصد خطای بسته شدن حلقه نشان دهنده تفاوت بین موقعیت شروع و پایان تقسیم بر کل مسافت پیاده روی برای یک مسیر بسته است. به عنوان مثال، یک خطای بسته شدن حلقه 1٪ نشان دهنده یک متر خطای انباشته به ازای هر صد متر طی شده است. جدول نشان می دهد که نتایج S-PDR دارای خطای بسته شدن حلقه کمتری با میانگین 2.6٪ پس از طی مسافت 566 متر است. درصد خطای بسته شدن حلقه با استفاده از HTC بدتر از هنگام استفاده از آیفون است. قرائت سنسور اینرسی تعبیه شده HTC M8 به اندازه کافی دقیق نیست و الگوریتم داخلی مقدار را هنگامی که حرکت خفیف است به صفر محدود می کند. با این حال، پیشرفت های هر دو گوشی هوشمند پس از کمک برداشتن فضایی قابل توجه است.
به منظور ارائه تجزیه و تحلیل خطای مطلق، مثلث های سبز روشن نشان داده شده در شکل 13 به عنوان نقاط چک استفاده می شود، که نقاط انحصاری هستند که به روز رسانی برداشتن فضایی را اجرا می کنند. جدول 11 و جدول 12 تعداد گام های هر کاربر و RMSE شش نقطه چک را برای تمام مسیرها نشان می دهد. جدول 11 و جدول 12همچنین بهبود PDR را پس از برداشتن فضایی نشان می دهد (PDR خالص و S-PDR را مقایسه کنید). به دلیل تنظیم ناکافی الگوریتم، شمارش اشتباه گام حدود پانزده است که منجر به خطای موقعیت قابل توجهی می شود. با این حال، PDR به کمک برداشتن فضایی باعث میشود که کل مسیر با مسیر پیادهروی واقعی منطبق باشد و میانگین بهبودی در حدود 50 درصد و همچنین میانگین RMSE حدود 8.8 متر در نقاط بازرسی داشته باشد. درصد میانگین RMSE و مسافت طی شده حدود 1.55 درصد است که بسیار کم است. شایان ذکر است که بیشترین خطا معمولاً از گوشه است و چهار نقطه چک در جنوب پس از یک دوره نسبتاً طولانی بدون به روز رسانی برداشتن فضایی رخ داده است، همانطور که در شکل 13 نشان داده شده است .
پس از مقایسه مکان های واقعی مثلث سبز تیره، مسیرهای الگوریتم پیشنهادی را می توان دید که با مکان های واقعی منطبق هستند. بنابراین، نتایج نشان میدهد که الگوریتم پیشنهادی بدون کالیبراسیون فردی، تنظیم پارامترها، سنسورهای پوشیدنی دقیقتر یا زیرساختهای محیطی بهتر کار میکند. نتایج همچنین نشان میدهد که الگوریتم پیشنهادی راحتتر است، هزینه کمتری دارد و برای کاربران عمومی که از گوشیهای هوشمند خود برای ناوبری داخلی استفاده میکنند، قابل تعمیمتر است. ادغام PDR مشکل مقادیر اولیه در فضای داخلی را برای همگرایی برداشتن فضا حل می کند، که از گرفتن تصویر مکرر جلوگیری می کند. در همین حال، برداشتن فضا کنترل خطا را برای PDR بدون هیچ کالیبراسیون و مدل پیچیده ای فراهم می کند. با این حال، PDR دقیق تر را می توان برای فاصله طولانی تر بین دو تصویر گرفته شده برای برداشتن فضایی در نظر گرفت. بنابراین، گروه ما شروع به کار بر روی یکپارچه سازی PDR با کمک برداشت فضایی و PDR با کمک نقشه (که کار قبلی ما است [36]). علاوه بر این، برخی از فناوری های موقعیت یابی مبتنی بر RSSI مانند اثر انگشت مغناطیسی و موقعیت یابی Wi-Fi وجود دارد. از آنجایی که نقطه دسترسی Wi-Fi در داخل خانه رایج است و تلفن هوشمند معمولاً دارای مغناطیسسنج است، این فناوریها را میتوان در آینده برای ادغام با برداشتن فضایی در نظر گرفت. با این حال، دقت آنها باید برای همگرایی برداشت فضایی قابل قبول باشد. همچنین به دلیل محدودیتهای سختافزاری، چالش بزرگی در تعیین الگوریتم پیشنهادی برای کاربردهای عملی و بلادرنگ با استفاده از گوشی هوشمند وجود دارد. پردازش تصویر مانند تشخیص ویژگی و تطبیق در این تحقیق به صورت دستی انجام می شود. بنابراین، فرآیند اتوماسیون در کارهای آینده مورد توجه قرار خواهد گرفت. توسعه سرورهای ابری یک راه حل برای آینده نزدیک است، زیرا می توانند تصویر پرس و جو را دریافت کنند و استخراج ویژگی و تطبیق تصویر را انجام دهند. راه حل دیگر استفاده از برخی ویژگی های طراحی شده مانند بارکد برای بهبود عملکرد پردازش تصویر است که کار مداوم ماست.
4. نتیجه گیری
این تحقیق PDR با کمک برداشتن فضایی را به منظور توسعه الگوریتمی پیشنهاد میکند که کمهزینه، آسان برای استفاده، بسیار قابل تعمیم و دقیق برای ناوبری عمومی عابر پیاده در داخل ساختمان است. با استفاده از الگوریتم پیشنهادی، کاربر فقط به یک گوشی هوشمند با سنسور اینرسی و دوربین تعبیه شده برای تخمین مکان نیاز دارد. کاربران نیازی به اجرای کالیبراسیون یا تنظیم پارامترهای پیشرفته در پس پردازش ندارند و همچنین نیازی به خرید زیرساخت های محیطی یا حسگرهای مجهز ندارند. ابتدا، IMMS برای نقشه برداری سریع یک محیط برای تولید تصاویر ارجاع جغرافیایی استفاده شد. سپس برداشت فضایی تخمین موقعیت را با دقت یک متر ارائه کرد و از اندازه گیری به روز شده برای PDR استفاده کرد. PDR مقادیر اولیه را برای محاسبه تکراری برداشت فضای داخل ساختمان پس از مشخص شدن مکان شروع ارائه کرد. PDR همچنین نیاز به گرفتن مکرر تصاویر برای برداشتن فضایی را کاهش داد و ناوبری مداوم را فراهم کرد. علاوه بر این، روش حداقل مربعات وزن تطبیقی برای تخمین بهتر برداشت فضا بر اساس تجزیه و تحلیل برداشت فضا با استفاده از دوربین گوشی هوشمند پیشنهاد شد. اگر فاصله اصلی ضبط دقیقتر شود، و روش حداقل مربع وزنی تطبیقی اعمال شود، عملکرد برداشتن فضا بدون کالیبراسیون دوربین میتواند عملکرد را زمانی که از IOPهای کالیبرهشده کامل استفاده میشود، تقریبی کند. علاوه بر این، برداشتن فضا بر اساس تصاویر ارجاع جغرافیایی موقعیتی را با مختصات مطلق برای ناوبری بدون درز فراهم می کند. به منظور اعتبارسنجی عملکرد الگوریتم پیشنهادی، آزمایشهای مختلفی در این تحقیق انجام شد. پس از طی مسافت 566 متر، نتایج اولیه ارائه شده در این مطالعه نشان می دهد که الگوریتم پیشنهادی میانگین درصد خطای بسته شدن حلقه حدود 2.6٪ و میانگین خطای نقطه چک حدود 8.8 متر را ارائه می دهد. کارهایی برای انجام و بهبودهایی مانند پردازش تصویر برداشتن فضایی و PDR پیشرفته وجود دارد. فرآیند تصویر اتوماسیون، سرورهای ابری، اطلاعات نقشه و فناوری موقعیت یابی مبتنی بر RSS در آینده در نظر گرفته خواهد شد.









بدون نظر