

خلاصه
PolInSAR ; تصحیح رادیومتری زمین ; ساختار عمودی ؛ مکانیسم پراکندگی ؛ مدل RVoG (مدل حجم تصادفی روی زمین)
1. معرفی
2. تجزیه و تحلیل ویژگی های PolInSAR در منطقه جنگلی
2.1. تجزیه و تحلیل شخصیت PolInSAR















 کمن=12[اسساعتساعت،من+اس��،من،اسساعتساعت،من–اس��،من،2اسساعت�،من]تی
کمن=12[اسساعتساعت،من+اس��،من،اسساعتساعت،من–اس��،من،2اسساعت�،من]تی
 کمن=[ک1تی،ک2تی]تی
کمن=[ک1تی،ک2تی]تی







 تی6=�{ککاچ}=[تی11Ω12Ω12اچتی22]
تی6=�{ککاچ}=[تی11Ω12Ω12اچتی22]که در آن H نشاندهنده جابجایی پیچیده و E {·} عملگر انتظار است. ماتریس های T 11 و T 22 با ماتریس های همدوسی پلاریمتریک منفرد مطابقت دارند و Ω 12 ماتریس همدوسی تداخل سنجی پلاریمتری [ 4 ] است.









 �=|�|ه�Φایکس=�{اس1اس2*}�{|اس1|2}�{|اس2|2}
�=|�|ه�Φایکس=�{اس1اس2*}�{|اس1|2}�{|اس2|2}با 0 ≤ ρ ≤ 1. در منطقه برهنه، فاز مربوط به ارتفاع توپوگرافی است. دامنه | ρ | که به عنوان انسجام تداخل سنجی نیز شناخته می شود، دقت Ф x را تعیین می کند .
2.2. کنوانسیون های پس پراکندگی




 �0=�/آ�
�0=�/آ�

 ��0.
��0.







 ��0=�0⋅آ�آ�=�⋅گناه��
��0=�0⋅آ�آ�=�⋅گناه�� ��0نتیجه است.
��0نتیجه است.



 ��0=�0⋅آ�آ�=�⋅برنزه����0یا ��0مقادیر backscatter را می توان با استفاده از یک مدل ارتفاع دیجیتالی (DEM) به صورت زمین کدگذاری کرد، به عنوان مثال، نمونه برداری مجدد در هندسه نقشه، تولید محصول geocoded-terrain-corrected (GTC) [29 ] . اگرچه موقعیت یا هندسه برآورد پس پراکندگی در محصولات GTC تصحیح شده است، پرتوسنجی تصویر حاصل بر اساس مدل بیضی باقی می ماند.
��0=�0⋅آ�آ�=�⋅برنزه����0یا ��0مقادیر backscatter را می توان با استفاده از یک مدل ارتفاع دیجیتالی (DEM) به صورت زمین کدگذاری کرد، به عنوان مثال، نمونه برداری مجدد در هندسه نقشه، تولید محصول geocoded-terrain-corrected (GTC) [29 ] . اگرچه موقعیت یا هندسه برآورد پس پراکندگی در محصولات GTC تصحیح شده است، پرتوسنجی تصویر حاصل بر اساس مدل بیضی باقی می ماند.3. طبقه بندی مکانیسم پراکندگی بر اساس روش تصحیح زمین رادیومتری برای وارونگی ارتفاع با تخمین ضریب تنوع گونه ای
3.1. بهینه سازی ضریب پراکندگی بر اساس تکرار




 سیمن∈سیپ×پبرای داده شود
سیمن∈سیپ×پبرای داده شود 





 من∈[1،…،n]، که در آن P ابعاد پلاریمتری است. در مورد اندازهگیریهای SAR پلاریمتری معمولی، پراکندگی پس در یک ترکیب دلخواه از قطبش ارسال و دریافت به وسیله:
من∈[1،…،n]، که در آن P ابعاد پلاریمتری است. در مورد اندازهگیریهای SAR پلاریمتری معمولی، پراکندگی پس در یک ترکیب دلخواه از قطبش ارسال و دریافت به وسیله:


 �من=�†سیمن�
�من=�†سیمن�جایی که ω�∈سیپیک بردار وزنی منفرد است 
 ω�†�و † نشان دهنده انتقال هرمیتی است. برای پایه پلاریزاسیون چهار قطبی P = 4، ω را می توان با جهت قطبش امواج الکترومغناطیسی و زوایای بیضی مرتبط با کره، Ψ و Χ برای قطبش های دریافت کننده و ارسال کننده r , t نشان داد .
ω�†�و † نشان دهنده انتقال هرمیتی است. برای پایه پلاریزاسیون چهار قطبی P = 4، ω را می توان با جهت قطبش امواج الکترومغناطیسی و زوایای بیضی مرتبط با کره، Ψ و Χ برای قطبش های دریافت کننده و ارسال کننده r , t نشان داد .












 �(Ψ�،��،Ψتی،�تی)=[پ�1پتی1پ�1پتی2پ�2پتی1پ�2پتی2]
�(Ψ�،��،Ψتی،�تی)=[پ�1پتی1پ�1پتی2پ�2پتی1پ�2پتی2]





 پتی/�،1/2اولین و دومین عنصر بردار پلاریزاسیون موج واحد برای قطبش دریافت و ارسال هستند.
پتی/�،1/2اولین و دومین عنصر بردار پلاریزاسیون موج واحد برای قطبش دریافت و ارسال هستند.




 �^�/�(Ψ,�)=[cosΨ−sinΨsinΨcosΨ][cos��sin�]
�^�/�(Ψ,�)=[cosΨ−sinΨsinΨcosΨ][cos��sin�]
 U∈�� × �، که می تواند به صورت زیر بازنویسی شود:
U∈�� × �، که می تواند به صورت زیر بازنویسی شود:
 ��=����†
��=����†







 �(�)=∑(��−�¯)(��(�)−�¯)∑(��−�¯)2∑(��(�)−�¯)2
�(�)=∑(��−�¯)(��(�)−�¯)∑(��−�¯)2∑(��(�)−�¯)2



















 �=argmax|∑(�†�����)−∑(�†����¯من)|∑(�†سیمن�–1�∑(�†سیمن�))2∑(�من–�)2=ارگحداکثر|�†آمن�|∑(�†بمن�)2
�=argmax|∑(�†�����)−∑(�†����¯من)|∑(�†سیمن�–1�∑(�†سیمن�))2∑(�من–�)2=ارگحداکثر|�†آمن�|∑(�†بمن�)2که در آن عملیات arg max () مخفف آرگومان حداکثر و است 








 آ=∑(سیمن�من)–�سی^�¯،
آ=∑(سیمن�من)–�سی^�¯،  بمن=سیمن–سی^،
بمن=سیمن–سی^،  سی^=1�∑سیمن. همه
سی^=1�∑سیمن. همه  سیمن،سی^،آهرمیتی مثبت نیمه معین هستند، در حالی که B i هرمیتی است. برای حل مسئله بهینه سازی معادله (13)، از یک روش تکراری برای به دست آوردن جواب تقریبی استفاده می شود. اصل روش بهینهسازی تبدیل Ci به قطبش بهینه و بهینهسازی یک تابع همبستگی تقریبی در مبنای قطبش جدید، با استفاده از معادله نابرابری (14) است :
سیمن،سی^،آهرمیتی مثبت نیمه معین هستند، در حالی که B i هرمیتی است. برای حل مسئله بهینه سازی معادله (13)، از یک روش تکراری برای به دست آوردن جواب تقریبی استفاده می شود. اصل روش بهینهسازی تبدیل Ci به قطبش بهینه و بهینهسازی یک تابع همبستگی تقریبی در مبنای قطبش جدید، با استفاده از معادله نابرابری (14) است :



 ∑من=1�(�†بمن�)2≤�†∑من=1�بمن†بمن�
∑من=1�(�†بمن�)2≤�†∑من=1�بمن†بمن�

 �^≈argmax�|�†��|�†∑�=1���†���argmax�|�†��|�†��∑��†��. برای ساده کردن محاسبه، از عملیات قدر مطلق در رابطه (15) صرف نظر می کنیم. سپس از ضریب لاگرانژی می توان برای حل مسئله بهینه به صورت زیر استفاده کرد:
�^≈argmax�|�†��|�†∑�=1���†���argmax�|�†��|�†��∑��†��. برای ساده کردن محاسبه، از عملیات قدر مطلق در رابطه (15) صرف نظر می کنیم. سپس از ضریب لاگرانژی می توان برای حل مسئله بهینه به صورت زیر استفاده کرد:

 �=�†��−��†��ω�†آ�منفی است، ممکن است به کمتر از صفر بودن همبستگی بهینه منجر شود. در این حالت، ماتریس A باید در 1- ضرب شود تا قطبش بهینه پیدا شود. با توجه به مشتق L در معادله (16)، راه حل را می توان به یک مسئله ویژه تبدیل کرد.
اف–1آ�=��
�=�†��−��†��ω�†آ�منفی است، ممکن است به کمتر از صفر بودن همبستگی بهینه منجر شود. در این حالت، ماتریس A باید در 1- ضرب شود تا قطبش بهینه پیدا شود. با توجه به مشتق L در معادله (16)، راه حل را می توان به یک مسئله ویژه تبدیل کرد.
اف–1آ�=��3.2. تصحیح زمین بر اساس رادیومتریک
-
پیش پردازش: یک مرحله کالیبراسیون رادیومتریک برای تبدیل تصویر SAR اصلی به روشنایی رادار β استفاده می شود و فرآیند چند نگاهی و فیلتر کردن برای به دست آوردن داده های SAR مایل انجام می شود.
-
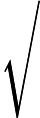
محاسبه مساحت DEM: با توجه به این واقعیت که نقاط لبه DEM دارای ارتفاعات متفاوتی هستند، منطقه طرح ریزی در محدوده زمین مربوط به شبکه DEM را می توان با جمع دو مثلث در شکل 2 a برای محاسبه دقیق منطقه طرح ریزی نشان داد . در آزمایش، ما ASTER DEM را با وضوح 30 متر، دانلود شده از http://gdem.ersdac.jspacesystems.or.jp/ انتخاب می کنیم .
-
LUT (Look Up Table) و محاسبه پیشبینی در محدوده زمین: ابتدا، این روش مختصات تصویر SAR اصلی ( r init ، a init ) و زاویه برخورد محلی مربوط به سلول DEM را محاسبه میکند. سپس، پیش بینی ها در صفحه γ dγ DEM ( N ، E ) بر اساس زاویه برخورد محلی به دست می آیند. در نهایت، مختصات SAR و زاویه برخورد محلی برای ساخت LUT ترکیب میشوند.
-
شبیه سازی تصویر SAR: نتیجه شبیه سازی اصلی تصویر SAR را می توان با استفاده از LUT و پیش بینی ها در صفحه γ بدست آورد . از آنجایی که مختصات در LUT اعداد صحیح نبودند، این ناحیه باید به سلول پیکسل همسایه اختصاص داده شود. سپس، می توان آن را از طریق یک روش درون یابی دوخطی نشان داده شده در شکل 2 ب، که در آن (int) به معنای عملیات عدد صحیح است، متوجه شد.
 د���م(ن،�)=اسΔتی00–Δتی01–Δتی10+اسΔتی11–Δتی10–Δتی12آ�(�،آ)=∑(ن،�)∈آ[د���م(ن،�)]
د���م(ن،�)=اسΔتی00–Δتی01–Δتی10+اسΔتی11–Δتی10–Δتی12آ�(�،آ)=∑(ن،�)∈آ[د���م(ن،�)] -
ثبت تصویر شبیه سازی و SAR واقعی: ابتدا فاصله بین تصویر SAR اصلی و تصویر SAR شبیه سازی را محاسبه می کنیم تا یک چند جمله ای ثبت بسازیم. سپس، یک روش جستجوی متقابل برای به دست آوردن نقطه تطبیق انجام می شود. در مرحله بعد، از نقطه تطبیق برای ساخت تابع چند جمله ای درجه دوم برای اصلاح LUT استفاده می شود. در نهایت، میتوانیم تصویر SAR شبیهسازی اصلاحشده را از طرح γ و LUT اصلاحشده دریافت کنیم.
-
تصحیح رادیومتری: نتیجه تصحیح رادیومتری در محدوده شیب را می توان با انتگرال ناحیه در صفحه γ بدست آورد . سپس، Orthophoto از نتیجه نهایی تصحیح زمین با استفاده از LUT تجدید نظر شده از طریق یک روش درونیابی دوخطی به دست می آید.�تی0=�0⋅آ�⋅cos�آ∑�





3.3. مدل سازی ساختار عمودی جنگل مبتنی بر مدل RVoG

 (�1�)اچتی2��2�=0
(�1�)اچتی2��2�=0جایی که  �1�و �2�به معنای بردار طرح ریزی و
�1�و �2�به معنای بردار طرح ریزی و  تی2�نشان دهنده پراکندگی حجم تصویر است. برای جداسازی پراکندگی سطحی تی^g ، از تجزیه فریمن-دوردن [ 30 ] توسعه یافته استفاده می شود.
تی2�نشان دهنده پراکندگی حجم تصویر است. برای جداسازی پراکندگی سطحی تی^g ، از تجزیه فریمن-دوردن [ 30 ] توسعه یافته استفاده می شود.

 تی^�=[تی11(1،1)–1�تی11(3،3)تی11(1،2)0تی11(2،1)تی11(2،2)–تی11(3،3)0000]
تی^�=[تی11(1،1)–1�تی11(3،3)تی11(1،2)0تی11(2،1)تی11(2،2)–تی11(3،3)0000]جایی که T 11 ( i , j ) نشان دهنده عنصر ستون i و ردیف j از ماتریس انسجام قطبی T 11 است .



 نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونت
نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونت


















 �˜=�*تیΩ12نوع گره ناشناخته: فونت�*نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتتی11=من1�+ه(–2�ساعت�/cos�0)من1جیΩ12=همن�2من2�+همن�1ه(–2�ساعت�)cos�0من2جیمن1�=همن�1ه(–2�ساعت�)cos�0🔻0ساعت�ه(–2��“)cos�0تی�د�“من1جی=🔻0ساعت��(�“)ه(–2��“)cos�0تی�د�“=تی�من2�=ه(–2�ساعت�)cos�🔻0ساعت�ه(–2��“)cos�0همنک��“تی�د�“
�˜=�*تیΩ12نوع گره ناشناخته: فونت�*نوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتنوع گره ناشناخته: فونتتی11=من1�+ه(–2�ساعت�/cos�0)من1جیΩ12=همن�2من2�+همن�1ه(–2�ساعت�)cos�0من2جیمن1�=همن�1ه(–2�ساعت�)cos�0🔻0ساعت�ه(–2��“)cos�0تی�د�“من1جی=🔻0ساعت��(�“)ه(–2��“)cos�0تی�د�“=تی�من2�=ه(–2�ساعت�)cos�🔻0ساعت�ه(–2��“)cos�0همنک��“تی�د�“

 �=همن�0(��+متر(�)1+متر(�)(1–��))
�=همن�0(��+متر(�)1+متر(�)(1–��))
 �همن∅0و همن∅0به ترتیب. از آنجایی که m(ω) برابر با صفر است، ضریب انسجام حجمی خالص گیاهی به دست می آید و می توان از آن برای تخمین ارتفاع درخت و ضریب خاموشی در وارونگی سه مرحله ای استفاده کرد.
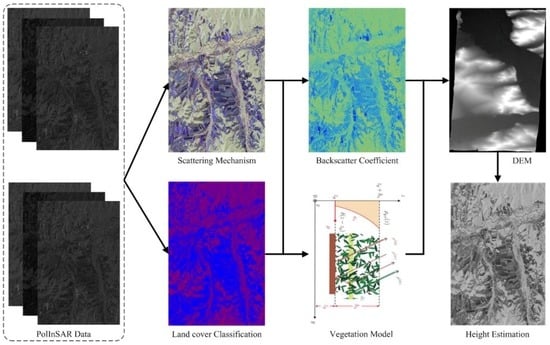
�همن∅0و همن∅0به ترتیب. از آنجایی که m(ω) برابر با صفر است، ضریب انسجام حجمی خالص گیاهی به دست می آید و می توان از آن برای تخمین ارتفاع درخت و ضریب خاموشی در وارونگی سه مرحله ای استفاده کرد.3.4. چارچوب اصلاح زمین و الگوریتم وارونگی ساختار عمودی پوشش گیاهی بر اساس تنوع گونه ای
-
برازش خط مستقیم حداقل مربعات: بر اساس ضریب انسجام مختلط کانال های پلاریزاسیون مختلف، از روش حداقل مربعات برای برازش خط مستقیم استفاده می شود. اگر فقط دو کانال پلاریزاسیون وجود داشته باشد، فرآیند اتصال برای محاسبه خط مستقیم دو نقطه منحط می شود.
-
محاسبه فاز زمین: ضریب انسجام پیچیده مربوطه فاز تداخل سنجی زمین به تقاطع دایره واحد و خط اتصال بستگی دارد. می توان با محاسبه موقعیت نسبی بین کانالی که بیشترین پراکندگی حجمی را دارد و کانالی که بیشترین پراکندگی سطحی را دارد به دست آورد. پس از بهینه شدن ضریب پس پراکندگی، نتیجه تصحیح زمین با صفر گاما و ناحیه پس پراکندگی A محاسبه می شود.
-
برآورد ارتفاع پوشش گیاهی: بر اساس فاز زمین در مرحله 2، ضریب انسجام پیچیده γ با e -i φ فاز زمین را حذف میکند تا ضریب انسجام پراکندگی حجم خالص γ V را به دست آورد . سپس ارتفاع پوشش گیاهی را می توان به صورت زیر محاسبه کرد:ساعت^�=2�ک�(1–2�گناه–1(|��|0.8))


 اس=�لوگاریتم(1+ن�)
اس=�لوگاریتم(1+ن�)که در آن S تعداد گونه ها است. N تعداد افراد و α ضریب تنوع است. عامل آلفا را می توان برای نشان دادن توزیع فضایی و تنوع پوشش گیاهی جنگلی منطقه جنگلی با استفاده از نتایج اندازه گیری درجا استفاده کرد. سپس تخمین ارتفاع پوشش گیاهی به یک مسئله بهینه سازی به صورت زیر تبدیل می شود:




 ساعت^�=1ک�{ارگ(��ه–من�0)+�(�–2گناه–1(|��|0.8))}
ساعت^�=1ک�{ارگ(��ه–من�0)+�(�–2گناه–1(|��|0.8))}4. آزمایش و بحث
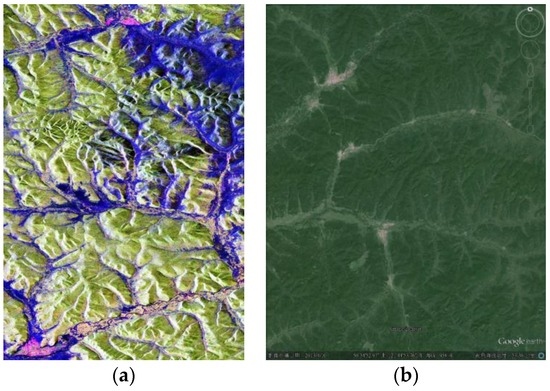
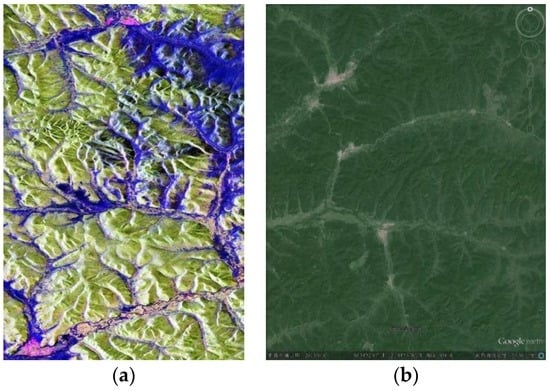
4.1. داده های تجربی و توضیحات



 سی�=اسآ–اسباسآ×100%
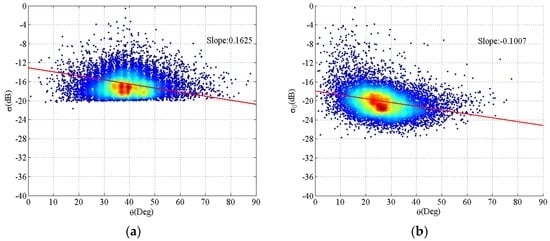
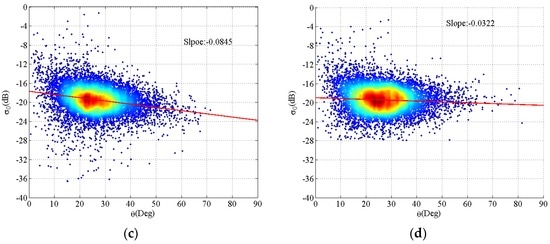
سی�=اسآ–اسباسآ×100%4.2. نتایج آزمایش و تجزیه و تحلیل
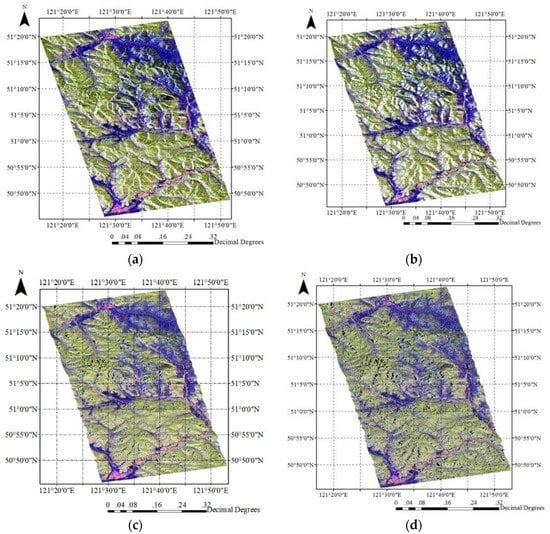
4.2.1. نتیجه تصحیح زمین









 ه�����هلآتیهمن�ه=آبس(سمنمتر�–سسآمترپلهسمنمتر�)⋅100%
ه�����هلآتیهمن�ه=آبس(سمنمتر�–سسآمترپلهسمنمتر�)⋅100%4.2.2. نتیجه تخمین ارتفاع پوشش گیاهی
5. نتیجه گیری ها
اختصارات
| SAR |
رادار دیافراگم مصنوعی
|
| PolInSAR |
رادار دیافراگم مصنوعی تداخل سنجی قطبی
|
| ALOS PALSAR |
رادار با دیافراگم مصنوعی آرایه فازی ماهوارهای با رصد زمین پیشرفته
|
| رادارسات |
ماهواره جهت و برد رادیویی
|
| BioSAR |
رادار دیافراگم مصنوعی زیست توده
|
| RVoG |
حجم تصادفی روی زمین
|
|
تابع چگالی احتمال
|
|
| RD |
محدوده داپل
|
| GEC |
ژئوکدینگ بیضی تصحیح شد
|
| GTC |
زمین کدگذاری شده اصلاح شد
|
| GCP |
نقاط کنترل زمینی
|
| DEM |
مدل دیجیتال ارتفاع
|
| RMSE |
ریشه میانگین مربعات خطا
|
| LUT |
جدول را جستجو کرد
|
منابع
- یانگ، ایکس. هوانگ، جی. وانگ، جی. وانگ، ایکس. Liu, Z. برآورد پارامترهای بیوفیزیکی پوشش گیاهی با سنجش از دور با استفاده از شبکه عصبی تابع پایه شعاعی. دانشگاه ژجیانگ. علمی A 2007 , 8 , 883-895. [ Google Scholar ] [ CrossRef ]
- رودگرمی، پ. منوری، م. فقهی، ج. نوری، ج. خراسانی، ن. پیش بینی اثرات زیست محیطی با استفاده از تصاویر سنجش از دور. دانشگاه ژجیانگ. علمی A 2008 , 9 , 381-390. [ Google Scholar ] [ CrossRef ]
- دیکسون، آر. سلیمان، ع. براون، اس. هاتون، آر. ترکسیر، ام. Wisniewski، J. استخرهای کربن و جریان اکوسیستمهای جنگلی جهانی. علوم 1994 ، 263 ، 185-190. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کلود، اس. پاپاتاناسیو، K. تداخل سنجی SAR قطبی. IEEE Trans. Geosci. Remote Sens. 1998 , 36 , 1551-1565. [ Google Scholar ] [ CrossRef ]
- گابریل، ج. اشمولیوس، سی. پاپاتاناسیو، ک. داریژاپوف، دی. تاتکوف، جی. تسیبجیتوف، تی. Boerner, W. استخراج ارتفاع درخت با استفاده از تداخل سنجی SAR قطبی. در مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 1999 (مجموعه مقالات IGARSS’99)، هامبورگ، آلمان، 28 ژوئن تا 2 ژوئیه 1999.
- یامادا، اچ. یاماگوچی، ی. رودریگز، ای. کیم، ی. Boerner, W. Polarimetric SAR interferometry برای تجزیه و تحلیل تاج پوشش جنگل با استفاده از روش تفکیک فوق العاده. در مجموعه مقالات IEEE 2001 بین المللی زمین شناسی و سمپوزیوم سنجش از دور (IGARSS’01)، سیدنی، استرالیا، 9 تا 13 ژوئیه 2001.
- وانگ، ی. چن، اچ. پنگ، ی. وان، کیو. نظریه و الگوریتم تخمین طیف فضایی . انتشارات دانشگاه Qinghua: پکن، چین، 2004. [ Google Scholar ]
- گیلاسو، اس. Gsrestier, F. تخمین تغییر شکل در نواحی همدوسی کم با استفاده از تداخل سنجی دیفرانسیل قطبی SAR. در مجموعه مقالات هشتمین کارگاه بین المللی 2015 در مورد تجزیه و تحلیل تصاویر سنجش از دور چند زمانی (چند دمایی)، انسی، فرانسه، 22 تا 24 ژوئیه 2015.
- اویسغران، س. ساعتچی، س. هنسلی، S. حساسیت اندازه گیری های Pol-InSAR به پارامترهای پوشش گیاهی. IEEE Trans. Geosci. Remote Sens. 2015 ، 53 ، 6561–6572. [ Google Scholar ] [ CrossRef ]
- پاپاتاناسیو، ک. هاجنسک، آی. موریرا، ا. ابر، S. پلاریمتری تداخل سنجی SAR با استفاده از مفهوم ریزماهواره پلاریمتری غیرفعال. در مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 2002 (IGARSS’02)، تورنتو، ON، کانادا، 24-28 ژوئن 2001.
- Xin, L. روشهای استخراج اطلاعات و مطالعه کاربرد تداخل سنجی SAR قطبی. دکتری پایان نامه، موسسه سنجش از دور و زمین دیجیتال آکادمی علوم چین، پکن، چین، 2002. [ Google Scholar ]
- زو، بی. ژانگ، ال. وانگ، دبلیو. Sun, D. وارونگی پارامترهای جنگل با استفاده از داده های پولینسار بر اساس الگوریتم ژنتیک. در مجموعه مقالات سمپوزیوم بین المللی علوم زمین و سنجش از دور IEEE 2006، دنور، CO، ایالات متحده آمریکا، 31 ژوئیه تا 4 اوت 2006.
- آنجیولی، ای. فراته، اف. وکیا، ا. مقایسه الگوریتمهای وارونگی Lavalle، M. با استفاده از L-Band 462 داده تداخل سنجی قطبی برای تخمین پارامترهای جنگل. در مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 2007، بارسلون، اسپانیا، 23 تا 28 ژوئیه 2007.
- کلود، اس. پاپاتاناسیو، ک. فرآیند وارونگی سه مرحله ای برای تداخل سنجی SAR قطبی. IEE Proc. رادار سونار ناویگ. 2003 ، 150 ، 125-134. [ Google Scholar ] [ CrossRef ]
- Cloud، S. PolInSAR منظم سازی با استفاده از تداخل سنجی فرکانس دوگانه. در مجموعه مقالات کنفرانس بین المللی رادار، آدلاید، استرالیا، 3-5 سپتامبر 2003.
- شائو، ز. یانگ، ن. شیائو، ایکس. ژانگ، ال. Peng, Z. الگوریتم تولید ابر نقطه متراکم چند نما بر اساس تصاویر سنجش از راه دور در ارتفاع پایین. Remote Sens. 2016 ، 8 . [ Google Scholar ] [ CrossRef ]
- Lebrl, F. Modeing تک تصویری مسائل هندسی. در پردازش تصویر رادارگرامتری آرتک هاوس: لندن، بریتانیا، 1990; صص 113-130. [ Google Scholar ]
- شرایر، جی. Meier, E. SAR اکتساب داده و تشکیل تصویر. در ژئوکدینگ SAR: داده ها و سیستم ها . Wichmann: Osnabrück، آلمان، 1993; صص 132-138. [ Google Scholar ]
- مایر، ای. گراف، سی. Nuesch, D. تولید محصولات تصویر SAR فضایی کدگذاری شده جغرافیایی. در مجموعه مقالات دوازدهمین سمپوزیوم کانادایی سنجش از دور، سمپوزیوم بین المللی علوم زمین و سنجش از دور، 1989. (IGARSS’89)، ونکوور، پیش از میلاد، کانادا، 10–14 جولای 1989.
- هوکمن، دی. Reiche، J. اصلاح شیب رادیومتری چند مدلی تصاویر SAR از زمین های پیچیده با استفاده از یک رویکرد نیمه تجربی دو مرحله ای. سنسور از راه دور محیط. 2015 ، 156 ، 1-11. [ Google Scholar ] [ CrossRef ]
- سکهار، ک. سنتیل، ک. Dadhwal، V. Geocoding تصاویر RISAT-1 MRS با استفاده از مدلهای RPC جبرانشده با سوگیری. بین المللی J. Remote Sens. 2014 ، 35 ، 7303-7315. [ Google Scholar ] [ CrossRef ]
- بایر، تی. زمستان، ر. Schreier, G. Terrain در پس پراکندگی SAR و تلاش برای اصلاح آنها تأثیر می گذارد. IEEE Trans. Geosci. Remote Sens. 1991 , 29 , 451-462. [ Google Scholar ] [ CrossRef ]
- کوچک، دی. هولکز، اف. مایر، ای. نیوش، دی. Barmettler, A. کالیبراسیون هندسی و رادیومتری تصاویر RADARSAT. در مجموعه مقالات ژئوماتیک در عصر رادارسات، اتاوا، ON، کانادا، 24 تا 30 مه 1997.
- کوچک، دی. هولکز، اف. مایر، ای. Nuesch، D. تصحیح رادیومتری مطلق در زمین ناهموار: درخواستی برای روشنایی یکپارچه رادار. در مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 1998 (IGARSS’98)، سیاتل، WA، ایالات متحده آمریکا، 6 تا 10 ژوئیه 1998.
- فرولا، ال. میلوویچ، جی. کارزنباوم، اچ. Gagliardini، D. تصحیحات رادیومتری و کالیبراسیون تصاویر SAR. در مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 1998 (IGARSS’98)، سیاتل، WA، ایالات متحده آمریکا، 6 تا 10 ژوئیه 1998.
- کارلوس، ال. پاپاتاناسیو، ک. لغو مکانیسم های پراکندگی در POLinSAR: کاربرد در تخمین توپوگرافی زیربنایی. IEEE Trans. Geosci. Remote Sens. 2013 , 51 , 953-965. [ Google Scholar ]
- او، سی. لی، اس. لیائو، ز. Liao، M. طبقهبندی بافت دادههای PolSAR بر اساس کدگذاری پراکنده متنهای قطبش موجک. IEEE Trans. Geosci. Remote Sens. 2013 , 51 , 4576–4590. [ Google Scholar ] [ CrossRef ]
- مین، دی. تون، تی. روکا، اف. تبالدینی، س. d’Alessandro، M. Villard، L. ارتباط توموگرافی رادار دهانه مصنوعی باند P با زیست توده جنگل های استوایی. IEEE Trans. Geosci. Remote Sens. 2014 , 52 , 967–979. [ Google Scholar ] [ CrossRef ]
- شرایر، جی. Meier، E. زمین دقیق تصاویر کدگذاری شده جغرافیایی را تصحیح کردند. در ژئوکدینگ SAR: داده ها و سیستم ها . Wichmann: Osnabrück، آلمان، 1993; صص 176-188. [ Google Scholar ]
- Ballester-Berman، JD; لوپز-سانچز، JM استفاده از مفهوم تجزیه فریمن-دوردن در تداخل سنجی SAR قطبی. IEEE Trans Geosci. Remote Sens. 2010 , 48 , 466-479. [ Google Scholar ] [ CrossRef ]
- ساچ، اس. بوئرمن، دبلیو. استیج، اچ. موری، س. اسمیت، تی. مدلسازی توزیع گونههای درختی آمازون و تنوع با استفاده از اندازهگیریهای سنجش از دور. سنسور از راه دور محیط. 2008 ، 112 ، 2000–2017. [ Google Scholar ] [ CrossRef ]






© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر