

خلاصه
در طول دهه گذشته، فناوریهای اسکن لیزری مبتنی بر زمین، در پاسخ به نیاز به دادههای سه بعدی دقیق (3D) در مورد محیط روستایی و شهری ما برای نقشهبرداری توپوگرافی، نقشهبرداری کاداستر و سایر سطوح خیابان، به طور فعال مورد مطالعه و اجرا قرار گرفتهاند. ویژگی هایی که اندازه گیری آنها توسط سایر ابزارها دشوار و زمان بر است. برای مناطق روستایی در چین، زمین پیچیده و برنامه ریزی ضعیف، کاربرد این فناوری پیشرفته را محدود می کند. برای بهبود کارایی بررسیهای روستایی، ما دو سیستم اسکن لیزری SSW (شوشی و سیوی) را برای نقشهبرداری سریع توپوگرافی ارائه میکنیم: سیستمهای اسکن لیزری stop-and-go و electro-tricycle scanning. هدف این مقاله ارزیابی این است که آیا دادههای اسکن لیزری جمعآوریشده توسط سیستمهای توسعهیافته SSW الزامات دقت را برای نقشهبرداری خانههای روستایی برآورده میکنند یا خیر. ما عملکرد دو سیستم اسکن لیزری را در روستای Ma’anshan، یک روستای کوچک و معمولی در استان Hubei، چین بررسی کردیم. برای به دست آوردن پوشش کامل دهکده، دادههای اسکن لیزری Stop-and-Go و الکتروسه چرخه را با هم ترکیب کردیم. عملکرد سیستمهای SSW توسعهیافته با نتایج خطوط ساختمان استخراجشده از دادههای ذوب شده در برابر نقشه برداری ساختمان ایجاد شده توصیف میشود.
کلید واژه ها:
توقف و رفتن ؛ سه چرخه برقی ; سیستم اسکن لیزری SSW ; بررسی کاداستر روستایی
1. معرفی
به روز رسانی به موقع اطلاعات کاداستر برای ثبت تغییرات مالکیت زمین و تقسیم املاک بسیار مهم است [ 1 ]. بررسی کاداستر داده های مکانی (مثلاً مرز قطعه زمین، شکل و مکان) را برای تهیه نقشه کامل کاداستر فراهم می کند. در حال حاضر، روش های بررسی کاداستر عمدتا به سه دسته تقسیم می شوند: (1) بررسی میدانی. (2) بررسی هوایی؛ و (3) تصاویر ماهواره ای. اگرچه بررسی میدانی کاملا دقیق است، اما به زمان و منابع زیادی نیاز دارد و دسترسی به مناطق دورافتاده/کوهستانی غیرممکن است. تصاویر هوایی و ماهواره ای را می توان به عنوان یک روش بررسی مقرون به صرفه برای مناطق بزرگ در نظر گرفت [ 2 ، 3]]. از زمانی که فناوریهای سیستم موقعیت جهانی (GPS) در اوایل دهه 1990 به طور گستردهای مورد استفاده تجاری قرار گرفتند، فناوریهای اسکن لیزری به تکنیکهای نقشهبرداری به خوبی برای کسب اطلاعات مکانی – مکانی تبدیل شدهاند [4 ] . یک سیستم اسکن لیزری از پرتو لیزر برای اسکن یک سطح قابل مشاهده استفاده می کند و زمان سفر پرتو و انرژی بازتاب شده از سطح را برای به دست آوردن اطلاعات هندسه و شدت سطح ثبت می کند. در مقایسه با روشهای سنتی بررسی کاداستر، اسکن لیزری میتواند ابرهای نقطهای سهبعدی با چگالی نقطهای بالا را در مدت زمان نسبتاً کوتاهی ثبت کند [ 5 ، 6 ، 7]]. علاوه بر این، به دلیل نقشه برداری فعال، سیستم های اسکن لیزری این قابلیت را دارند که در تمام روز بدون در نظر گرفتن نورهای محیطی کار کنند.
به گفته مالت و برتار [ 8]، از دهه 1990، توسعه سیستمهای اسکن لیزری هوابرد (ALS) از 2 به فرکانسهای پالسی 250 کیلوهرتز، از تکبازگشت به چند بازگشت تا ضبط تمام موج، و از چند دسیمتر به چند سانتیمتر پیشرفت کرده است. دقت داده ها این پیشرفت ها، از جمله تراکم نقطه، دقت داده ها و تصاویر کمکی همزمان، شناسایی، استخراج و بازسازی اشیاء سه بعدی را تا حدودی ممکن می سازد. یک سیستم اسکن لیزری زمینی ساکن (TLS) معمولاً روی یک سه پایه در بالای زمین در نمای خیابان نصب می شود. سیستمهای TLS (به عنوان مثال Optech ILRIS-3D؛ RIEGL VZ-400 و VZ-1000)، که از برنامههای تحقیقاتی تا فناوری جمعآوری دادههای مکانی توسعه یافتهاند، از اوایل دهه 2000 بهطور تجاری توسط تعداد زیادی از شرکتها و مؤسسات نقشهبرداری زمین ارائه شدهاند. در سراسر جهان.9 ، 10 ]. مشابه سیستم های ALS، بسیاری از سیستم های TLS مجهز به دوربین های یکپارچه ای هستند که برای رنگ آمیزی ابرهای نقطه و اشیاء سه بعدی یا تسهیل تفسیر ابر نقطه استفاده می شوند. Conforti [ 11 ] اشاره کرد که فناوری TLS می تواند مدل های زمین دیجیتال (DTMs) معادن روباز را تا پانزده برابر سریعتر از فناوری های نقشه برداری معمولی ایجاد کند. دقت داده های TLS در تجهیزات تجاری به طور متوسط حدود 1 سانتی متر در 100 متر است [ 12 ]. چنین داده های TLS بسیار دقیق و متراکم، با اطلاعات طیفی فراوان، استخراج ویژگی های دقیق و بازسازی سه بعدی را ممکن می سازد.
با این حال، فناوری ALS محدودیتهایی در نماهای ضعیف (مورب) چهرههای عمودی با تراکم نقطه نسبتاً کم (1-32 نقطه بر متر مربع ) دارد [ 13 ]. به طور مشابه، چون اشیا را نمی توان به طور کامل از یک مکان پوشش داد، روش ثبت همه اسکن ها از مکان های مختلف در یک چارچوب مرجع یکپارچه در حال حاضر استفاده کارآمد از فناوری TLS را در مناطق وسیع محدود می کند. با افزایش بازدید در یک منطقه بزرگ، روند ثبت نام با دقت لازم دشوار می شود. در همین حال، به دلیل درجه خاصی از همپوشانی مورد نیاز برای ردیابی مکانها و جهتهای نماهای متوالی برای فرآیند ثبت، تعادل درجات همپوشانی و تعداد نماها در جمعآوری دادهها در یک منطقه بزرگ یا پیچیده دشوار است.14 ]. با توجه به معایب سیستمهای ALS و TLS برای برنامههای کاربردی پیادهروی یا رانندگی واقعی، یک سیستم جایگزین، یک سیستم اسکن لیزری زمینی متحرک (MTLS) برای به دست آوردن دادههای تکمیلی سطح زمین با دید بهتر از زمینهای شیبدار مورد نیاز است. و اضلاع سازه ها [ 15 ].
اصطلاح «اسکن لیزری زمینی متحرک (MTLS)» به معنای سیستم اسکن لیزری است که بر روی هر سکوی متحرکی از جمله گاریها، وسایل نقلیه و قایقها نصب میشود، اما به استثنای هواپیما. در اینجا، یک سیستم MTLS به این معنی است که یک سیستم اسکن لیزری در بالای یک وسیله نقلیه زمینی مستقر شده است [ 14 ]. در سال های اخیر، MTLS به یک فناوری به سرعت در حال توسعه تبدیل شده است، به ویژه برای نقشه برداری دقیق بزرگراه ها، جاده ها، و اشیاء صحنه خیابان (به عنوان مثال، درختان، پل ها، چراغ های خیابان، ساختمان ها، خطوط برق، ترک ها، و خط کشی های جاده) در مناطق شهری [16] . , 17 , 18 , 19 , 20 , 21 , 22 , 23]. اگرچه روشهای مرسوم بررسی بزرگراهها، مانند ایستگاههای کل و برخی از انواع GNSS، میتوانند به دادههای توپوگرافی بسیار دقیقی دست یابند، این روشهای قدیمی برای جمعآوری چنین حجم عظیمی از دادهها زمان قابل توجهی را میطلبند و برای نقشهبرداری در مقیاس بزرگ مقرون به صرفه نیستند. پروژه ها. در مقابل، MTLS اخیر به یک فناوری به سرعت در حال توسعه تبدیل شده است، به ویژه برای نقشه برداری دقیق بزرگراه ها، جاده ها، و اشیاء صحنه خیابان (به عنوان مثال، درختان، پل ها، چراغ های خیابان، ساختمان ها، خطوط برق، ترک ها، و خط کشی های جاده) در مناطق شهری [16] . , 17 , 18 , 19 , 20 , 21 , 22 , 23]. به عنوان مثال، اگر از روش سنتی بررسی بزرگراه استفاده می شود، یک بزرگراه به طول 10 کیلومتر حداقل 20 شب برای بررسی و یک هفته برای پردازش اندازه گیری های حاصل طول می کشد. در حالی که در صورت استفاده از یک سیستم مدرن MTLS StreetMapper که معمولاً از دو اسکنر لیزری، یک وسیله نقلیه متحرک و غیره تشکیل شده است. از ابتدا تا انتها، کمتر از یک هفته برای اکتساب، پس پردازش و تولید گزارش طول خواهد کشید. روند اصلی امروز در نقشه برداری و GIS یک تقاضای فزاینده نه تنها برای دقت داده های مکانی، بلکه برای کارایی و هزینه کم است. سیستم های MTLS می توانند این تقاضا را برآورده کنند و نتایج نهایی را با افزایش بهره وری ارائه دهند [ 24 ].
در مناطق روستایی با زمین های ناهموار، یک وسیله نقلیه بزرگ مانند خودروی اسپرت (SUV) به دلیل وزن و ابعاد مناسب نیست. در چنین مواردی، یک سیستم MTLS را می توان بر روی یک تراکتور کم توان نصب کرد، که حمل و نقل قوی واحد MTLS را در انواع مختلف زمین برای نقشه برداری، به عنوان مثال، ساختمان های روستایی و مزارع فراهم می کند. اگرچه سازندگان مختلف انواع مختلفی از سیستمهای MTLS را ساختهاند، تقریباً همه آنها بر اساس سیستمهای ناوبری هستند که سیستمهای ماهوارهای ناوبری جهانی (GNSS) و یک واحد اندازهگیری اینرسی (IMU) را برای به دست آوردن مستقیم ابرهای نقاط اسکن لیزری با مرجع جغرافیایی یکپارچه میکنند. اعتبار سنجی هندسی یک پیش نیاز برای کاربران بالقوه برای استفاده از سیستم های MTLS برای نظرسنجی های درخواستی است. ادبیات برای کشف ویژگیهای سیستم MTLS موجود بررسی شد. گولت و همکاران [25 ] گزارش داد که LARA-3D دقت تخمینی 5 سانتی متری دارد. باربر و همکاران [ 26 ] بیان کرد که سیستم StreetMapper مقادیر خطای ریشه میانگین مربع (RMSE) را به ترتیب 10 سانتی متر و 3 سانتی متر در پلان سنجی و ارتفاع تولید می کند. گوان و همکاران [ 27 ] گزارش داد که سیستم RIEGL VMX-450 میانگین میانگین انحراف استاندارد تقریباً 4 سانتیمتر و 2 سانتیمتر را در پلانسنجی و ارتفاع بهدست آورد. کارتینن و همکاران [ 28 ] مقادیر RMSE 3.5 سانتی متری را به صورت عمودی (با برد 35 متر) و 2.5 سانتی متری پلانیمتری (با برد 45 متری) نشان داد. یوسیشکین گزارش داد که سیاهگوش با استفاده از شش ایستگاه پایه و نقاط کنترل زمینی که در هر 50 تا 80 متر در طول وسعت بررسی فاصله دارند، به دقت 1-2 سانتی متر دست می یابد [ 29 ].
با این حال، به دلیل سرمایه گذاری زیرساختی محدود در مناطق روستایی، به ویژه در چین، یک وسیله نقلیه بزرگ نمی تواند به برخی از روستاها با خیابان های بسیار باریک، پر دست انداز و دسترسی سخت دسترسی داشته باشد، که منجر به مشکل در بررسی کاربری زمین های روستایی با استفاده از سیستم های MTLS می شود. علاوه بر این، پوشش گیاهی متراکم اکثر روستاهای روستایی را احاطه کرده است که باعث انسداد بینایی می شود. برنامه ریزی ضعیف روستایی عامل منفی دیگری برای بررسی کاربری اراضی روستایی با استفاده از سیستم های MTLS است. بنابراین، در این مقاله، مطالعه ای برای ارزیابی عملکرد دو سیستم اسکن لیزری در یک سایت آزمایشی روستایی انجام شد. این مطالعه به نمایندگی از شرکت مهندسی فناوری اطلاعات فضایی Changjiang (ووهان، چین) انجام شد. ابرهای نقطه ای توسط شرکت فناوری و دانشگاه Capital Normal جمع آوری و آزمایش شدند. داده های تحویل شده در آینده نزدیک به یک محصول “تجاری” تبدیل خواهند شد. بنابراین، لازم بود دادههای تحویلشده برای کاربردهای سطح زمین، از جمله موارد زیر تأیید شود: فهرست اشیاء صحنه خیابان، شهر دیجیتال سه بعدی، مدیریت داراییهای ابزار، بررسی زمین، و ساختوساز جاده/راهآهن. مشتریان از بخش های دولتی تمام سطوح گرفته تا شرکت ها را شامل می شود. از نقطه نظر مشتری، انتظار می رود داده های تحویل شده از سیستم های اسکن لیزری سیار الزامات تولید عملی را برآورده کند. این مقاله بر روی مشخصات فنی سیستمهای SSW MTLS برای بررسی بیشتر خانههای روستایی تمرکز دارد. بقیه مقاله به شرح زیر سازماندهی شده است: یک منطقه مطالعاتی روستایی در شرح داده شده است از جمله موارد زیر: موجودی اشیاء صحنه خیابان، شهر دیجیتال سه بعدی، مدیریت دارایی ابزار، بررسی زمین، و ساخت جاده/راه آهن. مشتریان از بخش های دولتی تمام سطوح گرفته تا شرکت ها را شامل می شود. از نقطه نظر مشتری، انتظار می رود داده های تحویل شده از سیستم های اسکن لیزری سیار الزامات تولید عملی را برآورده کند. این مقاله بر روی مشخصات فنی سیستمهای SSW MTLS برای بررسی بیشتر خانههای روستایی تمرکز دارد. بقیه مقاله به شرح زیر سازماندهی شده است: یک منطقه مطالعاتی روستایی در شرح داده شده است از جمله موارد زیر: موجودی اشیاء صحنه خیابان، شهر دیجیتال سه بعدی، مدیریت دارایی ابزار، بررسی زمین، و ساخت جاده/راه آهن. مشتریان از بخش های دولتی تمام سطوح گرفته تا شرکت ها را شامل می شود. از نقطه نظر مشتری، انتظار می رود داده های تحویل شده از سیستم های اسکن لیزری سیار الزامات تولید عملی را برآورده کند. این مقاله بر روی مشخصات فنی سیستمهای SSW MTLS برای بررسی بیشتر خانههای روستایی تمرکز دارد. بقیه مقاله به شرح زیر سازماندهی شده است: یک منطقه مطالعاتی روستایی در شرح داده شده است انتظار می رود داده های تحویل شده از سیستم های اسکن لیزری سیار الزامات تولید عملی را برآورده کند. این مقاله بر روی مشخصات فنی سیستمهای SSW MTLS برای بررسی بیشتر خانههای روستایی تمرکز دارد. بقیه مقاله به شرح زیر سازماندهی شده است: یک منطقه مطالعاتی روستایی در شرح داده شده است انتظار می رود داده های تحویل شده از سیستم های اسکن لیزری سیار الزامات تولید عملی را برآورده کند. این مقاله بر روی مشخصات فنی سیستمهای SSW MTLS برای بررسی بیشتر خانههای روستایی تمرکز دارد. بقیه مقاله به شرح زیر سازماندهی شده است: یک منطقه مطالعاتی روستایی در شرح داده شده استبخش 2 . دو سیستم اسکن لیزری SSW در بخش 3 معرفی شده اند . دقت داده ها با آدرس دادن به داده های مرجع، و تجزیه و تحلیل راه حل ناوبری و نقاط لیزری جمع آوری شده در بخش 4 ارزیابی می شود . در نهایت، در بخش 5 نتیجه گیری شده است .
2. شرح منطقه مطالعه
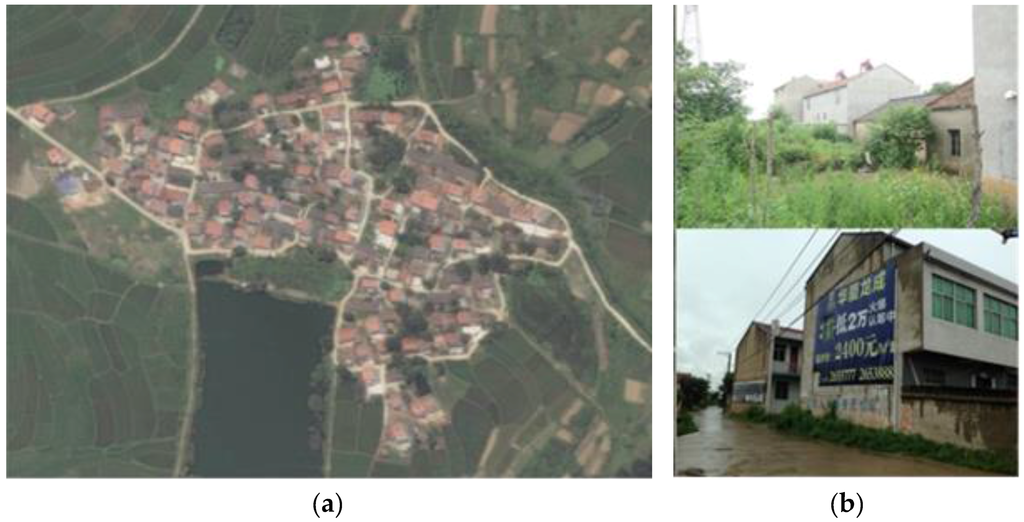
روستای معانشان (طول جغرافیایی 113 درجه و 57 دقیقه 35.49 اینچ، عرض جغرافیایی 31 درجه و 7 دقیقه و 62 ثانیه شمالی)، واقع در شهر شیائوگان، هوبی، چین، مساحت 0.07 کیلومتر مربع را پوشش می دهد .و شامل 157 منزل مسکونی است. از نظر جغرافیایی، این روستا در شمال رودخانه یانگ تسه و در جنوب کوه های تاپیه و تونگ بای قرار دارد. زمین یک زمین معمولی نسبتا صاف و ساده است. این شهر از آب و هوای نیمه گرمسیری و قاره ای موسمی برخوردار است. یعنی دارای چهار فصل معمولی، بارندگی فراوان، آب و هوای گرم و مرطوب و نور کافی خورشید است. روستای معانشان دارای میانگین دمای 15.5 تا 16.5 درجه سانتیگراد و بارندگی سالانه 1040 تا 1230 میلی متر است. بنابراین، این منطقه که توسط پوشش گیاهی ضخیم پوشیده شده است، یک منطقه اصلی برای بررسی مسکن روستایی و حقوق استفاده از زمین ساخت و ساز توسط شرکت مهندسی فناوری اطلاعات فضایی Changjiang، Ltd. شکل 1 منطقه مورد بررسی را نشان می دهد. شکل 1الف یک تصویر ماهواره ای از کل روستا است. و دو عکس دیجیتال در شکل 1 ب نماهای نزدیک از محیط محلی هستند.
3. سیستم های لیزر SSW
3.1. توضیحات سیستم
سیستم های SSW (ShouShi و SiWei) که در سال 2014 توسعه یافتند، به طور کلی به چهار بخش اصلی به شرح زیر تقسیم می شوند: (1) اسکنر لیزری SSW، دوربین(ها)، یک سیستم ناوبری حاوی واحدهای اندازه گیری اینرسی (IMU). (2) آنتن (های) سیستم ناوبری جهانی ماهواره (GNSS)؛ (3) نشانگر اندازه گیری فاصله (DMI). و (4) یک واحد کنترل که داده ها را از تمام سنسورها همگام می کند. شرکت فناوری GEO-VISION و دانشگاه Capital Normal، هر دو در پکن، چین، اسکنر لیزری SSW را توسعه و راهاندازی کردند. جدول 1 تجهیزات SSW فعلی و پارامترهای اصلی جمعآوری داده را خلاصه میکند، که توسط اپراتور قابل انتخاب هستند تا به طور مناسب جمعآوری داده را با کار در دست تطبیق دهند.
سیستم اسکن لیزری SSW مورد استفاده در این نقشه کاداستر، یک واحد فشرده با جریان مستقیم (DC) است که می تواند بر روی پلتفرم های مختلف تلفن همراه برای برنامه در دسترس نصب شود. این سیستم که توسط سیستم DC خودرو تامین می شود، به طور مداوم داده ها را ضبط می کند. اسکنر لیزری در SSW از لیزر 1550 نانومتری با توان 20 متر وات (لیزر کلاس 1) استفاده می کند. اسکنر SSW با وزن 10 کیلوگرم در محدوده دمایی 20- تا 50 درجه سانتیگراد کار می کند. قطر پرتو لیزر در خروجی پرتو اسکنر 3.3 میلی متر است و پرتو بر اساس زاویه واگرایی 0.3 متر راد پخش می شود. در نتیجه، اندازه ردپای لیزر 20 میلیمتر در فاصله 100 متری از اسکنر است که به همراه اندازهگیری برد دقیق، اندازهگیریهای سه بعدی دقیق از اجسام را امکانپذیر میکند. بالاترین وضوح زاویه ای موجود با نرخ اسکن 100 هرتز 0 است. 002 درجه با نرخ تکرار پالس (PRR) 200 کیلوهرتز. با نرخ اسکن 20 هرتز، بالاترین وضوح زاویه ای موجود 0.008 درجه با PRR 100 کیلوهرتز است. در پایان، توزیع نقطه روی سطح یک جسم به سرعت سکو، جهت سطح و زاویه اسکن بستگی دارد.
همانطور که در بخش 2 ذکر شد ، روستای معانشان، پوشیده از پوشش گیاهی انبوه، برنامه ریزی روستایی ضعیفی برای خانه های مسکونی دارد. در نتیجه، در تلاش برای به دست آوردن پوشش کامل روستا برای این نقشهبرداری کاداستر، سیستمهای لیزری کامل SSW به صورت سفارشی با استفاده از قفسههای ضربهگیر بر روی دو خودروی مختلف نصب شدند. یک سیستم SSW در بالای یک مینی ون با حالت اسکن توقف و حرکت (سیستم SSW توقف و حرکت) نصب شده بود. دیگری بر روی یک الکترو سه چرخه (سیستم SSW الکترو سه چرخه) نصب شده بود.
3.2. سیستم SSW الکترو سه چرخه
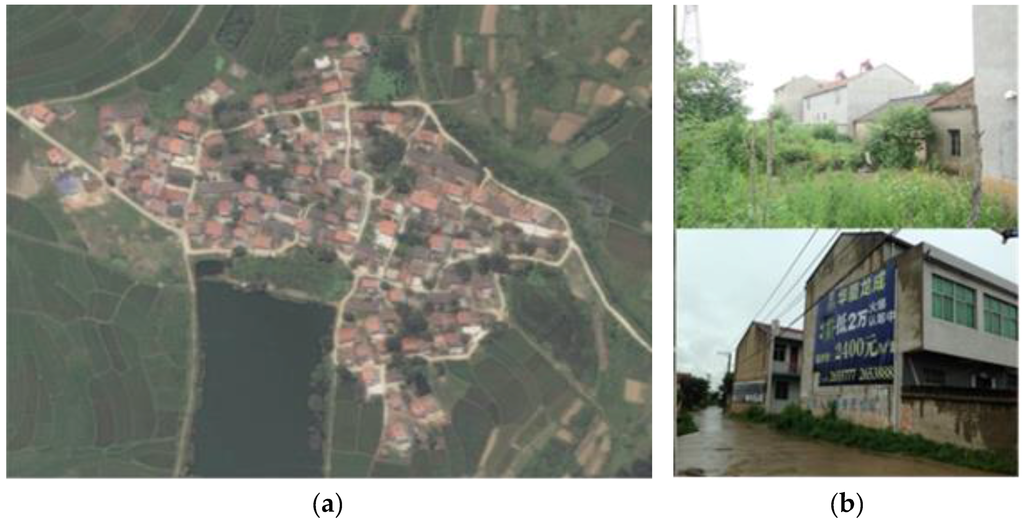
به دلیل تنگ بودن خیابان ها یا جاده های بین خانه ها در روستای معانشان، هیچ وسیله نقلیه بزرگی مانند خودروهای شاسی بلند قادر به تردد در روستا نیستند. در این مورد، سیستم اسکن لیزری SSW را می توان بر روی یک سه چرخه الکتریکی نصب کرد که وسیله ای آسان برای مانور دادن سیستم MTLS در اطراف روستا فراهم می کند. علاوه بر این، یک موتور الکتریکی دارای ارتعاشات مکانیکی کمتری نسبت به موتورهای سوخت فسیلی است، بنابراین نمونههای نرمتری را ممکن میسازد. پیکربندی سیستم در شکل 2 الف نشان داده شده است. داده ها در 14 ژوئیه 2014 با سیستم اسکن لیزری SSW بر روی یک سه چرخه الکتریکی به دست آمد. پارامترهای اسکن برای گرفتن 200000 نقطه در ثانیه با نرخ اسکن 100 هرتز تنظیم شدند. محدوده اندازه گیری به عنوان پیکربندی پیش فرض سیستم (یعنی 1.5 متر تا 200 متر) تنظیم شد. شکل 2b مسیر را نشان می دهد که سیستم SSW الکترو سه چرخه در دهکده رانده شد. این سیستم یک ساعت طول کشید تا کل روستا را پوشش دهد. داده های جمع آوری شده شامل 150000 اسکن است. از نظر تئوری، هر پروفایل شامل 200000 اندازه گیری نقطه در قالب نقاط سه بعدی با اطلاعات شدت است. با این حال، در مجموع 140 میلیون اکو لیزری گرفته شد. شکل 2 ج نمای پرنده ای از داده های گرفته شده را نشان می دهد. نقاط به رنگ نماد دنیای واقعی توسط تصاویر گرفته شده به طور همزمان رنگ می شوند. سنسورهای تصویربرداری دقیق کالیبره شده، اطلاعات رنگی را برای نقشه برداری از هر نقطه در ابرهای نقطه جمع آوری می کنند.
در طی جمعآوری دادهها، مشخص شد که تنها پانزده خانه از مجموع 135 خانه مسکونی، که در هر دو طرف مسیرهای رانده شده نزدیک به هم قرار دارند، توسط نقاط بسیار متراکم برای مدلسازی سهبعدی پوشیده شدهاند. به ویژه، نمای آنها به سمت جاده هایی است که نقاط متراکم تری دارند. همانطور که در نمای نزدیک از داده های گرفته شده مشاهده می شود ( شکل 2د) دو نمای ساختمان ها، چندین درخت و خطوط برق متعدد به خوبی نمایان شده است. با این حال، برای برخی از خانههایی که توسط پوشش گیاهی متراکم مسدود شدهاند، مانند درختان و بوتهها، تراکم نقطه بسیار کم است و اطلاعات شدت حاوی نویز زیادی است که منجر به عدم اطمینان در مکانیابی گوشههای ساختمان از ابرهای نقطهای برای تجزیه و تحلیل کاربری زمین میشود. علاوه بر این، سیستم SSW الکتریکی سه چرخه مبتنی بر زمین نمی تواند سقف خانه ها را کامل بگیرد. علاوه بر این، سرعت سه چرخه و سرعت اسکن تأثیر زیادی بر توزیع و چگالی نقطه ای داده های به دست آمده دارد. شکل 2 e ابرهای نقطه رنگی ارائه شده توسط تصاویر دیجیتالی را نشان می دهد که توسط دوربین های موجود در همان سیستم SSW گرفته شده است. همانطور که در شکل 2 مشاهده می شودe، برخی از نقاط سفید در ابرهای نقطه رنگی وجود دارد. دو دلیل برای این پدیده وجود دارد: نویز و الگوریتم ثبت، که ابرهای نقطه ای و تصاویر دیجیتال گرفته شده توسط سیستم SSW الکترو سه چرخه را ادغام می کند. اگرچه دوربین ها به طور معمول کالیبره شده اند، اما همچنان اختلاف منظر وجود دارد که منجر به تغییر جزئی بین ابرهای نقطه و تصاویر می شود.
3.3. Stop-and-Go SSW System
در روستای معانشان، بیشتر خانهها کمتر از ده متر ارتفاع دارند و پوشش گیاهی انبوه آن را فراگرفته است. هیچ اطلاعات بیشتری (به عنوان مثال، نقشه برداری کاداستر) در روستای معانشان در دسترس نیست. به ویژه، به دلیل طراحی و مدیریت ضعیف، خطوط انتقال بسیار پایین هستند. این برنامه ریزی و مدیریت نامناسب به مشکل در اسکن کل دهکده با استفاده از سیستم های TLS یا MTLS نصب شده بر روی یک وسیله نقلیه بزرگ مانند یک SUV کمک کرد. کار آزمایشی مرتبط زیادی مورد نیاز بود. مهمتر از آن، زمین پر دست انداز روستای معانشان، پایداری MTLS را کاهش می دهد و در نتیجه بر دقت داده ها تأثیر منفی می گذارد. بنابراین، یک سیستم Stop-and-Go SSW، به عنوان یک نوع MTLS، برای مدیریت بازده اکتسابی پایین TLS و بهبود پایداری MTLS [ 30] توسعه یافت.].
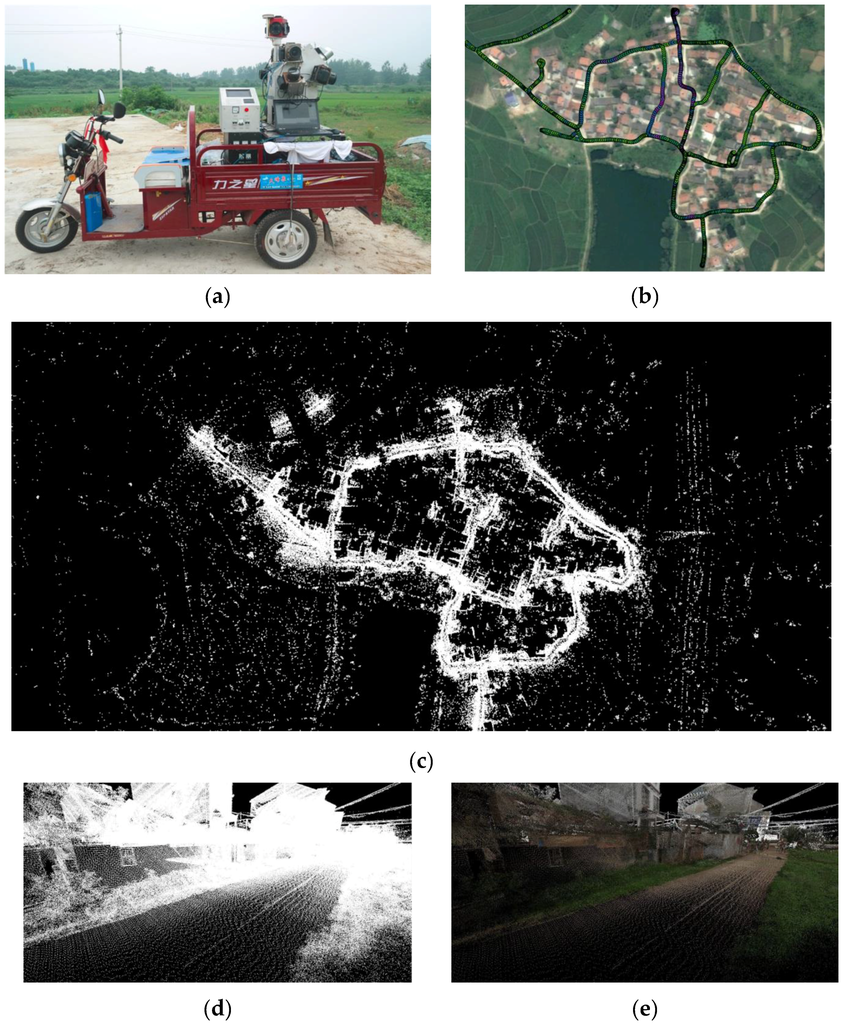
شکل 3 سیستم اسکن توقف و حرکت توسعه یافته SSW را نشان می دهد. در این سیستم، تمام سنسورها از جمله اسکنر SSW، GPS/IMU و سیستم کنترل، همانطور که در شکل 3 ب نشان داده شده است، در بالای یک غلاف نصب می شوند. پایین غلاف بر روی بالای وسیله نقلیه ثابت می شود و بر این اساس غلاف را می توان بالا و پایین کرد. به طور خاص، سیستم توقف و حرکت SSW با پارک کردن وسیله نقلیه در هنگام رسیدن به یک طرح هدف و سپس چرخش خودکار و دقیق سیستم در اطراف میله و اسکن کل فضای اطراف سیستم با دوربینهای فعال همزمان اجرا میشود. سپس سیستم توقف و حرکت SSW به نمودار هدف بعدی می رود و همان عملیات تکرار می شود.
برای پوشش کل روستا، هشت قطعه هدف تعیین شد. هدف از این مطالعه به دست آوردن پوشش کامل روستای معانشان با عکس های دیجیتال و داده های اسکن برای مدل سازی کامل و فهرست کاربری اراضی بود. سه اپراتور نقشه برداری بیست ساعت طول کشید تا یک طرح نقشه برداری ایجاد کنند، هشت قطعه اسکن را دقیقا اندازه گیری کنند، سیستم SSW MTLS را راه اندازی کنند و سیستم را راه اندازی کنند. پارامترهای اسکن برای گرفتن 200000 نقطه در ثانیه با نرخ اسکن 20 هرتز تنظیم شدند. شکل 4 a ابرهای نقطه اکتسابی را نشان می دهد. در مجموع، 90 میلیون نقطه اکو ثبت شد. هر مجموعه داده شامل اسکن کامل 360 درجه و شش گروه عکس دیجیتال است. شکل 4 ب نمای نزدیک از نقاط رنگی ارائه شده از عکس های دیجیتال فرعی را نشان می دهد. شکل 4c نمونه های ساختمانی ناقص را نشان می دهد که توسط درختان متراکم مسدود شده اند. دادههای جمعآوریشده توسط سیستم توقف و حرکت SSW، ساختارهای بالایی اکثر سقفهای ساختمانها و پوشش گیاهی مرتفع را به دلیل الگوی نمای «بالا به پایین» سیستم پوشش میدهد. با این حال، سیستم اشیاء (به عنوان مثال، جاده ها، خانه های کم ارتفاع) را که توسط درختان و خانه های مسکونی مسدود شده بودند را از دست داد. علاوه بر این، چگالی نقطه با افزایش فاصله اسکن از ایستگاه های اسکن کاهش می یابد. بنابراین، اکتساب ناقص داده ها و تراکم نقطه ناسازگار منجر به مشکلات در شناسایی و استخراج اطلاعات در مرحله پس از پردازش می شود. اگرچه می توان انتظار داشت که این پدیده رخ دهد، یک نقشه برداری دستی در محل پشتی، که همیشه مورد نیاز است، می تواند به راحتی با کار بسیار کمتری نسبت به اندازه گیری دستی کل روستا از ابتدا انجام شود.
3.4. کالیبراسیون سیستم
سیستم MTLS ترکیبی از چندین مؤلفه (IMU، GNSS، DMI، دوربین(ها) و اسکنر(های) لیزر SSW) و سایر زیرسیستم های کنترلی است. بنابراین، یک اسکنر لیزری زمانی ارجاع جغرافیایی می یابد که موقعیت و جهت آن نسبت به سیستم مختصات نقشه برداری توسط مجموعه ای از سیستم های ناوبری شناخته شود. برای یک هدف، مختصات سه بعدی را می توان به صورت زیر تعریف کرد:
[ایکسپ�پزپ]م=[ایکسجیپاس�جیپاسزجیپاس]م+آرمنم�م(�،�،�)⋅(آراسمنم�(Δ�،Δ�،Δ�)⋅�پاس(� د)+[�ایکس���ز]اسمنم�–[�ایکسجی/من��جی/من�زجی/من]منم�جیپاس)
که در آن پارامترها و توضیحات آنها در جدول 2 آمده است .
با توجه به معادله (1)، کالیبراسیون شامل کالیبراسیون پارامترهای ذاتی سنسورهای جداگانه و کالیبراسیون پارامتر نصب است. بنابراین، یک روش کالیبراسیون دقیق برای سیستم های MTLS برای اطمینان از کیفیت هندسی ابر نقطه جمع آوری شده مورد نیاز است. در این مطالعه، تمام پارامترهای ذاتی و نصب در یک میدان کالیبراسیون، که یک محیط آسمان باز با دسترسی خوب به سیگنالهای GNSS است، کالیبره شدند. اهداف مصنوعی بسیار بازتابنده به عنوان نقاط کنترلی که توسط ایستگاه های کل اندازه گیری می شوند، استفاده می شوند. با توجه به اینکه همه سنسورها روی یک صفحه ثابت هستند، بازوهای تراز با یک روش ساده اندازه گیری فیزیکی اندازه گیری می شوند. تمام پارامترهای ذاتی و سایر پارامترهای نصب (عدم تراز دید سوراخ) با یک روش کالیبراسیون یک مرحله ای اصلاح می شوند. مجموعه داده های MTLS در چندین نقطه به منظور کاهش ارتباط داده ها و بهبود دقت کالیبراسیون جمع آوری شد. سپس اهداف مصنوعی به صورت دستی از نقاط ضبط شده در همان اسکن/زمان یا زمان های مختلف توسط اسکنرهای مختلف شناسایی می شوند. با استفاده از نرم افزار SWDY (SiWei DianYun)، جفت نقطه-نقطه مطابقت برای مدل ریاضی عمومی ارائه شده در معادله (1) ایجاد می شود. یک فرآیند خطی سازی توسط بسط سری تیلور برای تنظیم حداقل مربعات (LSA) مورد نیاز است. روش کالیبراسیون به طور مکرر برای بدست آوردن تخمین بهتر از پارامترهای سیستم و پارامترهای نصب انجام می شود. همانطور که اشاره کردیم، تمام اجزای سیستم بر روی یک صفحه ثابت می شوند. بنابراین، نیازی به انجام کالیبراسیون برای هر کار اسکن نیست، مگر اینکه قطعات به دلایلی دوباره نصب شده باشند. یا سیستم برای مدت طولانی مثلاً نیم سال استفاده می شد. پارامترهای کالیبراسیون معمولاً توسط سازنده ارائه می شود. برای نشان دادن دقت کالیبراسیون، از سه هدف بازتابنده در فواصل اندازه گیری 50 متر، 60 متر و 95 متر استفاده شد. با مقایسه فواصل کالیبره شده با اندازه گیری های بررسی شده توسط یک ایستگاه کل، میانگین دقت اندازه گیری 1.06 سانتی متر است.
3.5. محصولات تحویلی کاربر
هر دو سیستم SSW توقف و حرکت یا سیستم SSW الکترو سه چرخه می توانند محصولات مستقیم زیر را تولید کنند: (1) داده های مسیر و ابرهای نقطه سه بعدی، که برای نقشه برداری کاداستر و به روز رسانی سیستم های اطلاعات جغرافیایی ملی، استانی و شهری ارائه می شوند. ; و (2) تصاویر ارجاع جغرافیایی به دست آمده با سیستم دوربین در فرمت JPEG یا AVI، که در مرحله پس از پردازش برای بازرسی مجازی یا کمک به استخراج اشیاء در ساختمان و صحنه خیابان استفاده می شود. از ابرهای نقطه به دست آمده و تصاویر، کاربران نهایی را می توان با سایر قابل تحویل های مرسوم، مانند DTMs، شبکه های جاده ای، و مدل های ساختمانی سه بعدی با اطلاعات دقیق نما در اختیار کاربران نهایی قرار داد.
4. تجزیه و تحلیل عملکرد اسکن لیزری SSW
کل پروژه نقشه برداری از کل روستای معانشان به سه نقشه بردار مجموعاً بیست و دو ساعت (تقریباً سه روز کاری) زمان برد: بیست ساعت توسط سیستم SSW توقف و حرکت و دو ساعت توسط سیستم SSW الکترو سه چرخه. سه نقشه بردار تخصصی به نوبت ماشین نقشه برداری را هدایت کردند و سیستم های نقشه برداری را برای جمع آوری داده ها به کار گرفتند. پس از جمع آوری داده ها، یک مهندس دفتر حرفه ای سه روز کاری طول کشید تا داده های جمع آوری شده را با استفاده از نرم افزار SWDY (SiWei DianYun) پردازش کند. با این حال، با استفاده از روش سنتی نقشه برداری کاداستر، این پروژه شش نقشه بردار حرفه ای پنج روز کاری طول می کشد تا داده های مربوط به روستا را جمع آوری کنند. به طور خاص، این روستا ابتدا به چندین منطقه نقشه برداری کوچک تقسیم می شود. که سپس به شش نقشه بردار اختصاص داده می شوند تا برای جمع آوری داده ها در روستا قدم بزنند. در پس پردازش داده ها، هفت روز کاری برای هر نقشه بردار برای پردازش وظایف محول شده لازم است. مهمتر از آن، با استفاده از سیستمهای SSW، میتوان سایت پروژه را از روی دسکتاپ با کمک عکسهای ارجاعشده جغرافیایی مجدداً مشاهده کرد، زیرا عکسهای ارجاعشده جغرافیایی میتوانند درک آسان صحنه را فراهم کنند. به این ترتیب، صحت پس از پردازش داده ها ممکن است بهبود یابد.
4.1. داده های مرجع
برای ارزیابی عملکرد کلی سیستمهای SSW مورد استفاده در این نقشهبرداری کاداستر برای مناطق روستایی، مجموعهای از دادههای مرجع (یعنی اطلاعات جمعآوریشده جدید که حداقل یک سطح دقیقتر از سیستم مورد آزمایش است) مورد نیاز است. به عنوان مثال، عکاسی هوایی اغلب برای ارزیابی دقت نقشه های تهیه شده از تصاویر ماهواره ای با وضوح متوسط استفاده می شود [ 31]]. بنابراین، در این پروژه، Real Time Kinematic (RTK) GPS به عنوان کارآمدترین تکنیک برای ارائه مجموعه ای ثابت از نقاط کنترل انتخاب شد. با این نکات، عملکرد سیستم های توقف و حرکت و الکترو سه چرخه SSW قابل ارزیابی است. حدود 60 نقطه کنترل با خطای 2-3 سانتی متر در پلان سنجی و 7-8 سانتی متر در ارتفاع برای اعتبار سنجی در آن مناطق آزمایش جمع آوری شد. در بیشتر موارد، برای ارزیابی دقت، نقاط گوشه اشیاء در خیابان، خانهها و علامتهای سفید جاده را انتخاب کردیم که به راحتی در ابرهای نقطهای قابل شناسایی بودند. این نقاط در رابطه با یک ایستگاه پایه با میانگین طول خط پایه کمتر از 6.0 کیلومتر مسافت پس پردازش شدند. به منظور به دست آوردن داده های GNSS دیفرانسیل بسیار دقیق،
4.2. ارزیابی داده ها
پس از بررسی میدانی، دادههای لیزر SSW بهدستآمده مستقیماً به نرمافزار SWDY وارد شد و با نقاط حقیقت زمینی اندازهگیری شده توسط RTK GPS مقایسه شد. ما از مقادیر حداقل حداکثر و میانگین انحراف استاندارد دادههای جمعآوریشده از سیستمهای توقف و حرکت و الکتروسه چرخه MTLS برای ارزیابی دقت پلانسنجی و ارتفاع استفاده کردیم. هنگامی که نقاط چک به ابزار SWDY وارد شدند، مشاهده کردیم که دو نزدیکترین نقطه اسکن شده با فاصله 1.0 متری از مکان های فرضی دورتر بودند. با توجه به اینکه دادههای اسکن لیزری از ابتدا تا انتها یکسان بودند، ما دو نقطه حقیقت زمین را نویز فرض کردیم و آنها را از دادههای مرجع حذف کردیم.
مقایسه با استفاده از SWDY انجام شد. پس از وارد کردن دادههای جمعآوریشده و دادههای مرجع به SWDY، به صورت تعاملی نقاط لیزر را در یک شعاع معین از هر نقطه مرجع برای اندازهگیری اختلاف ارتفاع آنها انتخاب کردیم و در نهایت دقت ارتفاع نقاط لیزر را بهدست آوردیم. انحراف استاندارد ارتفاعات برای تمام نقاط چک برای نشان دادن عملکرد کلی سیستم محاسبه شد.
همانطور که در جدول 3 نشان داده شده است، میانگین انحراف استاندارد برای اسکنرهای لیزری توقف و حرکت و الکترو سه چرخه به ترتیب 2.6 سانتی متر و 3.9 سانتی متر است. در مقایسه با اعتبارسنجی دقت ارتفاع، ارزیابی دقت پلانیمتری نقاط اسکن لیزری پیچیده است، زیرا شناسایی نقاط مشترک در ابرهای نقطه ساده نیست. برای مقایسه با نقاط اسکن شده، نقاط بازرسی واقع در گوشههای ساختمانها را انتخاب کردیم. ابتدا، تصاویر را به نرم افزار SWDY وارد کردیم تا به مکان یابی نقاط اسکن شده نزدیک به نقاط مرجع کمک کنیم. سپس با استفاده از یک خط کش اندازه گیری، تفاوت آنها را در پلان سنجی و ارتفاع اندازه گیری کردیم. میانگین انحراف استاندارد (σ میانگین) دقت پلانیمتری برای دو نوع سیستم اسکن لیزری به ترتیب 3.3 و 5.7 سانتی متر بود. توجه داشته باشید که حداقل انحراف استاندارد (σ min ) در نقاط کنترل اندازه گیری شده در نزدیکی ایستگاه های پایه با پوشش GPS خوب ظاهر می شود. با وجود خطاهای نقطه چک، دقت نقطه اسکن لیزری با دقت سیستم POS سازگار است و حتی از مشخصات GNSS/IMU نیز بهتر عمل می کند. خطاها کمتر از 5± سانتی متر هستند و الزامات دقت داده ها را برای نقشه برداری کاداستر برآورده می کنند [ 32 ].
علاوه بر این، ما دو ابر نقطه ای را به ترتیب از داده های SSW توقف و حرکت و سیستم های SSW الکترو سه چرخه برای ارزیابی ارتفاع و دقت پلان سنجی انتخاب کردیم. با فرض اینکه جاده ای در یک منطقه محلی کوچک مسطح است، داده های جاده را در یک مستطیل کوچک برای محاسبه دقت ارتفاع انتخاب کردیم. دقت محلی را می توان با ارزیابی باقیمانده ها به دنبال حداقل مربعات نقاط MTLS به صفحه تعیین کرد. به عنوان مثال، نقاط زرد نشان داده شده در شکل 5 a,c به یک صفحه برازش می شود و فاصله تا صفحه بر اساس پارامترهای صفحه به صورت جداگانه محاسبه می شود. همانطور که در جدول 3 نشان داده شده است ، سیستم توقف و حرکت SSW به میانگین σ max ، σ min و σ می رسد.دقت ارتفاع 3.9 سانتی متر، 1.2 سانتی متر و 3.1 سانتی متر، به ترتیب. سیستم SSW الکترو سه چرخه به ترتیب میانگین ارتفاع σ max ، σ min و σ به ترتیب 4.7 سانتی متر، 1.8 سانتی متر و 3.2 سانتی متر است. به طور مشابه، همانطور که توسط نقاط زرد در شکل 5 b,d نشان داده شده است، داده های نمای ساختمان عمودی برای ارزیابی دقت پلانیمتری ابرهای نقطه جمع آوری شده از داده های توقف و حرکت SSW و سیستم های SSW الکترو سه چرخه انتخاب می شوند. به ترتیب. همانطور که در جدول 3 نشان داده شده است ، سیستم توقف و حرکت SSW به میانگین σ max ، σ min و σ می رسد.دقت پلانیمتری به ترتیب 4.3 سانتی متر، 1.9 سانتی متر و 3.5 سانتی متر. سیستم الکترو سه چرخه SSW به ترتیب حداکثر σ max ، σmin و σ دقت پلانیمتری 4.6 سانتی متر، 2.6 سانتی متر و 3.9 سانتی متر را به دست می آورد.
در مقایسه با دقت ارتفاع، دقت پلانیمتری تا حدودی کمتر است. انحراف معیار از حدود 1 تا 5 سانتی متر متغیر است. بر اساس اطلاعات به دست آمده از بررسی ادبیات، پرسشنامه ها و تجربه تیم پروژه، برای کاربردهای رایج حمل و نقل، دقت سه بعدی در سطح اطمینان 95 درصد عموماً به محدوده 1 سانتی متر (برای کاربردهایی مانند بررسی های مهندسی و روسازی، DTM و پایداری شیب نیاز دارد. ) تا 10 سانتی متر (برای کاربردهایی مانند مدل سازی شهری و ارزیابی وضعیت جاده [ 33 ]). بنابراین، داده های جمع آوری شده توسط یک سیستم SSW برای نقشه برداری کاداستر روستایی با دقت پلان سنجی و ارتفاع کافی است.
4.3. ترکیب داده ها
لیم و همکاران [ 34 ] اشاره کرد که سیستمهای اسکن لیزری ثابت و متحرک فنآوریهای مکملی هستند که در صورت ترکیب، نماهای سه بعدی کامل از ویژگیهای منظره ایجاد میکنند. در این مطالعه، مجموعه دادههای نقطهای گرفتهشده توسط سیستمهای SWW stop-and-go یا electro-tricycle نمیتوانند کل دهکده را پوشش دهند، که منجر به نتایج غیر قابل اعتماد بازسازی ساختمان شد. بنابراین، ثبت و ادغام دو مجموعه داده نقطه ای برای حذف سایه ساختمان و بهبود چگالی نقطه و پوشش داده برای استخراج خطوط ساختمان ضروری بود. شکل 6 نتایج ادغام شده داده های اسکن لیزری Stop-and-Go و Electro-tricycle SSW را نشان می دهد. همانطور که در شکل 6 الف مشاهده می شود، تراکم نقطه ای روستا در مقایسه با شکل 4 به طرز چشمگیری بهبود یافته است.الف، اگرچه در داخل و اطراف روستا اجزای ناهموار و پراکنده هنوز وجود دارد. شکل 6 b,c همان خانههای مسکونی را از نماهای مختلف نشان میدهد، و واضح است که جزئیات خانه به خوبی در مجموعه دادههای ذوب شده ارائه شده است، بنابراین نشان میدهد که مجموعههای نقطه به اندازه کافی متراکم هستند تا استخراج ساختمانها را تضمین کنند.
برای بررسی کاربرد دادههای ذوبشده برای نقشهبرداری کاداستر با استفاده از دادههای اسکن لیزری Stop-and-Go و الکتروسهچرخه SSW، ما دادههای ذوب شده را بر روی نقشه برداری ساختمان ارائه شده توسط شرکت مهندسی فناوری اطلاعات فضایی Changjiang همپوشانی کردیم. شکل 7 a مجموعه داده های همپوشانی نقاط ذوب شده و نقشه برداری ساختمان را نشان می دهد. برای نشان دادن واضح امکان سنجی داده های ذوب شده، ما سعی کردیم خطوط ساختمان را استخراج کنیم و نتایج استخراج شده را با نقشه برداری ساختمان موجود مقایسه کنیم. برای به دست آوردن مرزهای ساختمان، ابتدا نقاط زمین از داده های ذوب شده با استفاده از روش فیلتر تراکم تراکم اصلاح شده مثلثی نامنظم (TIN) که در ابتدا توسط اکسلسون پیشنهاد شده بود، حذف شدند [35] .]. سپس، تجزیه و تحلیل ویژه و اطلاعات چند بازگشتی برای حذف نقاط درختی از دادههای ذوب شده و به دنبال آن استخراج خودکار بلوکهای ساختمانی با استفاده از تقسیمبندی منطقه استفاده شد. در نهایت، الگوریتم داگلاس-پوکر برای تعمیم بخشهای مرزی استفاده شد، که مرزهای ساختمانی با شکل مستطیلی بر اساس تطبیق الگوی حداقل مربعات با محدودیت زاویه راست دقیقاً تعیین میشوند. روش استخراج دقیق ساختمان را می توان در لی و گوان [ 36 ] یافت.
از میان 135 خانه مسکونی در روستای معانشان، 27 خانه به طور کامل از داده های ترکیب شده استخراج شد که 20 درصد را شامل می شود. 31 خانه با بیش از 80 درصد خطوط ساختمانی استخراج شد که 23 درصد را شامل می شود. 37 خانه با خطوط ساختمانی 30٪ تا 70٪ استخراج شد که 27٪ را شامل می شود. و 40 خانه که 30 درصد را تشکیل می دهند، به طور کامل از داده های ترکیب شده استخراج نشدند. شکل 7 ب خطوط ساختمانی استخراج شده از کل روستای معانشان را نشان می دهد. همانطور که در شکل 7 c نشان داده شده است، در داخل روستا، خطوط خطوط برخی از ساختمان ها گم شده و از داده های ترکیب شده استخراج نمی شوند. شکل 8 و شکل 9نمای نزدیک داده های ذوب شده، بردارهای ساختمانی استخراج شده به صورت دستی و مراجع نقشه های برداری را نشان می دهد. همانطور که در شکل 8 ج و شکل 9 مشاهده می شودج، خطوط ساختمانی استخراج شده از داده های ذوب شده نسبتا کامل و صحیح هستند. با این حال، در مقایسه با مراجع، برخی از جزئیات ساختمان های استخراج شده گم شده است. علت این پدیده انسداد جدی ناشی از پوشش گیاهی متراکم و عدم دسترسی به مرکز روستا است. اگرچه نقاط جمعآوریشده توسط سیستمهای SWW stop-and-go و electro-tricycle SSW، به ترتیب، برای پوشش دهی به کل روستا ترکیب شدند، برخی از ساختمانها و مناطق دشوار از قلم افتادند. برای به دست آوردن پوشش کامل، کمی کار بررسی مجدد با یک یا دو نقشه بردار مورد نیاز بود که ساختمان ها و قطعات گمشده را مجددا اندازه گیری می کردند و بنابراین داده های جمع آوری شده SSW را تکمیل می کردند.
برای ارزیابی کمی دقت موقعیتی خطوط ساختمانی استخراجشده، حدود 40 لبه ساختمان را انتخاب کرده و با اندازهگیری دستی فواصل عمود بر آنها را با مراجع مربوطهشان مقایسه کردیم. شکل 10 مقادیر مطلق اختلافات موقعیتی بین ساختمان های استخراج شده و مراجع را نشان می دهد. همانطور که در شکل 10 مشاهده می شود، حداقل، حداکثر و میانگین دقت موقعیت به ترتیب 2.1، 8.9، 5.0 سانتی متر است. طبق استاندارد ملی جمهوری خلق چین برای نقشه برداری کاداستر 1:500، خطاهای نقشه برداری مورد نیاز از 5.0 ± سانتی متر تا 7.5 ± سانتی متر برای نقاط مرزی اندازه گیری شده ساختمان در مقایسه با نقاط کنترل متغیر است. بنابراین، دقت موقعیتی ساختمانهای استخراجشده از دادههای اسکن لیزری SSW مطابق با استاندارد ملی نقشهبرداری کاداستر است.
4.4. عوامل موثر بر صحت داده های اسکن الکترو سه چرخه
از آنجا که راه حل ناوبری با اسکنر لیزری SSW برای بدست آوردن مختصات ارجاع جغرافیایی یکپارچه شده است، یک جزء حیاتی برای هر سیستم اسکن لیزری سه چرخه ای است. دقت راه حل ناوبری اغلب دقت کلی سیستم یکپارچه اسکن لیزری الکترو سه چرخه را تعیین می کند. با این حال، برای سیستم اسکن لیزری الکترو سه چرخه، راهحل ناوبری باید حتی پیچیدهتر از سیستم در یک محیط میدان باز باشد، زیرا موانع مختلف روی زمین، مانند ساختمانهای بلند و درختان انبوه، دورههایی از GPS را ایجاد میکنند که ماهواره سیگنال ها برای کمک به راه حل ناوبری در دسترس نیستند.
به طور معمول، دقت GNSS به موارد زیر بستگی دارد: موقعیت یابی تک یا دیفرانسیل، گیرنده های تک فرکانس یا دو فرکانس، و عملیات بلادرنگ یا پس از پردازش. به طور کلی، حداقل چهار ماهواره در دید با دقت رقیق موقعیت (PDOP) شش یا کمتر برای سرویس موقعیت یابی استاندارد مورد نیاز است. با این حال، دقت واقعی GNSS با مکان و زمان روز متفاوت است. در طی این بررسی، ما در واقع حتی چهار ماهواره در نظر نداشتیم و PDOP بیشتر از شش بود. تغییرپذیری دقت واقعی GPS از مکانی به مکان دیگر و زمانی به زمان دیگر تحت تأثیر اثرات رقیق شدن دقت است. در حالت ایده آل، دقت GNSS قابل قبول زمانی حاصل می شود که مقدار PDOP کمتر از چهار باشد.
اگرچه دقت موقعیت یابی با مسدود شدن کامل سیگنال های ماهواره ای کاهش یافت، اما دقت GNSS/IMU همچنان الزامات موقعیت یابی برای این بررسی را برآورده می کند. این به دلیل IMU است، یک حسگر کمکی که توسط GNSS راه اندازی شده است، دقت موقعیت یابی را در طول دوره ای از قطع GNSS حفظ می کند. اول، این سیستم یکپارچه IMU، دو آنتن GNSS دو فرکانس و DMI برای تولید یک راهحل ناوبری است، که در آن از گیرنده ثانویه برای کمک در محاسبه سرفصلها و DMI برای ارائه بهروزرسانیهای دقیق سرعت خودرو استفاده میشود. هنگامی که وسیله نقلیه در موقعیتی حرکت می کرد که بدون ماهواره در نظر بود، این به راه حل کلی کمک کرد. دومین، استفاده از ابزار Waypoint GrafNav همچنین مؤلفه مهم دیگری را برای راهحل کلی ناوبری فراهم میکند، زیرا این ابزار از فیلتر Kalman برای مقایسه IMU با دادههای مربوطه از زیرسیستم اندازهگیری اولیه GNSS، DMI و GNSS Azimuth (GAMS) برای تخمین خطاهای ناوبری IMU استفاده میکند. . زمانی که دادههای تصحیح GNSS بیدرنگ در دسترس باشد، یک الگوریتم پردازش محکم همراه استفاده میشود. سپس نرم افزار IMU را با خطاهای ناوبری تخمین زده شده IMU تنظیم می کند. این فرآیند IMU، تخمین خطای ناوبری، و تصحیح خطا یک حلقه تنظیم خطای بسته را تشکیل میدهد که نیاز به دادههای ناوبر اینرسی با دادههای حسگر کمکی دارد. در نتیجه می توان از آن اطلاعات کمکی برای بهبود موقعیت و جهت گیری استفاده کرد. و زیرسیستم اندازه گیری آزیموت GNSS (GAMS) برای تخمین خطاهای ناوبری IMU. زمانی که دادههای تصحیح GNSS بیدرنگ در دسترس باشد، یک الگوریتم پردازش محکم همراه استفاده میشود. سپس نرم افزار IMU را با خطاهای ناوبری تخمین زده شده IMU تنظیم می کند. این فرآیند IMU، تخمین خطای ناوبری، و تصحیح خطا یک حلقه تنظیم خطای بسته را تشکیل میدهد که نیاز به دادههای ناوبر اینرسی با دادههای حسگر کمکی دارد. در نتیجه می توان از آن اطلاعات کمکی برای بهبود موقعیت و جهت گیری استفاده کرد. و زیرسیستم اندازه گیری آزیموت GNSS (GAMS) برای تخمین خطاهای ناوبری IMU. زمانی که دادههای تصحیح GNSS بیدرنگ در دسترس باشد، یک الگوریتم پردازش محکم همراه استفاده میشود. سپس نرم افزار IMU را با خطاهای ناوبری تخمین زده شده IMU تنظیم می کند. این فرآیند IMU، تخمین خطای ناوبری، و تصحیح خطا یک حلقه تنظیم خطای بسته را تشکیل میدهد که نیاز به دادههای ناوبر اینرسی با دادههای حسگر کمکی دارد. در نتیجه می توان از آن اطلاعات کمکی برای بهبود موقعیت و جهت گیری استفاده کرد. تخمین خطای ناوبری و تصحیح خطا یک حلقه تنظیم خطای بسته را تشکیل میدهد که نیاز دارد دادههای ناوبر اینرسی با دادههای حسگر کمکی سازگار باشد. در نتیجه می توان از آن اطلاعات کمکی برای بهبود موقعیت و جهت گیری استفاده کرد. تخمین خطای ناوبری و تصحیح خطا یک حلقه تنظیم خطای بسته را تشکیل میدهد که نیاز دارد دادههای ناوبر اینرسی با دادههای حسگر کمکی سازگار باشد. در نتیجه می توان از آن اطلاعات کمکی برای بهبود موقعیت و جهت گیری استفاده کرد.
5. نتیجه گیری ها
در این مطالعه، یک سیستم اسکن لیزری توسعهیافته SSW بر روی دو خودرو برای نقشهبرداری از روستای معانشان، بهویژه برای بررسی خانههای روستایی نصب شد. اول، چون جاده های بسیار باریک و ناهموار اجازه نمی داد یک وسیله نقلیه بزرگ، مانند یک SUV، در کل روستا حرکت کند، سیستم SSW روی یک سه چرخه برقی نصب شد. اما به دلیل پوشش گیاهی انبوه و صعب العبور بودن برخی از مناطق، نقاط برای اکثر ساختمان ها ناقص است. بنابراین، یک سیستم SSW توقف و حرکت برای چرخش و گرفتن داده ها از نمای هوایی حدود 10 متر از سطح زمین راه اندازی شد. دادههای جمعآوریشده، دادههای گرفتهشده از سیستم SSW الکترو سه چرخه را جبران میکند.
دادههای ترکیب شده از سیستمهای SWW stop-and-go و electro-tricycle اکثریت روستا را پوشش میدهد و به طور قابلتوجهی تراکم و کیفیت نقطه را بهبود میبخشد، که به استخراج خطوط ساختمانی برای نقشهبرداری کاداستر روستایی و بررسی خانههای روستایی کمک میکند. برای بررسی بیشتر کاربرد دادههای ترکیب شده برای نقشهبرداری کاداستر روستایی، اعتبارسنجی دادهها ضروری است تا اطمینان حاصل شود که مشتریان با اطمینان از سیستم SSW استفاده میکنند. سیستم Stop-and-Go SSW به میانگین دقت پلان سنجی و ارتفاع به ترتیب 3.3 سانتی متر و 2.6 سانتی متر می رسد. سیستم SSW الکترو سه چرخه به ترتیب به میانگین دقت پلانیمتری و ارتفاع 5.7 سانتی متر و 3.9 سانتی متر دست می یابد. علاوه بر این، میانگین دقت داده های داده های توقف و حرکت SSW به ترتیب 3.1 سانتی متر و 3.5 سانتی متر در ارتفاع و پلان سنجی حفظ می شود. میانگین دقت داده های داده های SSW الکترو سه چرخه در ارتفاع و پلان سنجی به ترتیب 3.9 سانتی متر و 3.2 سانتی متر است. ارزیابی داده های هندسی ثابت می کند که استفاده از سیستم های SSW پتانسیل امیدوارکننده ای برای برنامه های نقشه برداری کاداستر روستایی دارد.
علاوه بر این، نقشهبرداری کاداستر روستای معانشان با دادههای اسکن لیزری توقف و حرکت و الکتروسه چرخه و عکسهای دیجیتال برای فتوگرامتری زمینی ابتدایی در مدت زمان کوتاهی انجام شد. داده های جمع آوری شده برای یک هدف واحد می تواند برای مقاصد دیگر بدون بازدید میدانی بیشتر مورد استفاده مجدد قرار گیرد. یک سیستم مدیریت داده در درازمدت مورد نیاز خواهد بود تا به گروههای متنوعی از کاربران امکان دسترسی به دادههای فعلی و تاریخی را برای استخراج اطلاعات مورد نیاز بدهد. ترکیبی از سیستمهای SWW stop-and-go و الکترو سه چرخه مناطق روستایی را 40% تا 50% سریعتر از یک روش معمولی بررسی میکند و اندازه یک خدمه اسکن کوچکتر از خدمه معمولی مربوطه است. علاوه بر این، فناوریهای ترکیبی، محیط اطراف را بسیار جامعتر و سریعتر از جایگزینها ثبت میکنند.
منابع
- علی، ز. تولادار، ع. Zevenbergen, J. یک رویکرد یکپارچه برای به روز رسانی نقشه های کاداستر در پاکستان با استفاده از داده های سنجش از دور ماهواره ای. بین المللی J. Appl. زمین Obs. Geoinf. 2012 ، 18 ، 386-398. [ Google Scholar ] [ CrossRef ]
- جیانیتو، ام. گیوسانی، ع. لچی، جنرال موتورز; Scaioni، M. “نقشه برداری سریع” از تصاویر ماهواره ای با وضوح بالا: یک رویکرد پایدار برای ارائه نقشه برای کشورهای در حال توسعه. در مجموعه مقالات بیستمین کنگره ISPRS “قاره های پل زدن تصویر جغرافیایی”، استانبول، ترکیه، 12 تا 23 ژوئیه 2004.
- Onkalo, P. روش ها و تکنیک های بررسی کاداستر در کشورهای در حال توسعه. مورد کامبوج و کوزوو در مجموعه مقالات کنگره XXIII FIG “شکل دادن به تغییر”، مونیخ، آلمان، 8 تا 13 اکتبر 2006.
- برالدین، جی. بلیز، اف. لوهر، فناوری اسکن لیزری U. در اسکن لیزری هوابرد و زمینی ؛ Vosselman, G., Mass, H., Eds. Whittles Publishing: Dunbeath, Scotland, UK, 2010; صص 1-42. [ Google Scholar ]
- هالا، ن. پیتر، م. سفالو، ا. کرمر، جی. نقشه برداری موبایل لیدار برای جمع آوری داده های شهری. در مجموعه مقالات چهاردهمین کنفرانس بین المللی سیستم های مجازی و چند رسانه ای، لیماسول، قبرس، 20 تا 25 اکتبر 2008.
- چهاتا، ن. گوا، ال. مالت، سی. انتخاب ویژگی لیدار هوابرد برای طبقه بندی شهری با استفاده از جنگل تصادفی. در مجموعه مقالات اسکن لیزری 2009، پاریس، فرانسه، 1 تا 2 سپتامبر 2009.
- Ussyshkin، V. تکنولوژی اسکن لیزری موبایل برای کاربرد نقشه برداری: از جمع آوری داده ها تا محصولات نهایی. در مجموعه مقالات هفته کاری FIG 2009 – نقش کلیدی نقشه برداران در توسعه شتابان، ایلات، اسرائیل، 3 تا 8 مه 2009.
- مالت، سی. برتار، F. لیدار توپوگرافی شکل موج کامل: پیشرفته ترین. ISPRS J. Photogramm. از راه دور. Sens. 2009 , 64 , 1-16. [ Google Scholar ] [ CrossRef ]
- اولوفسون، ک. هولمگرن، جی. Olsson، H. اندازه گیری ساقه و ارتفاع درخت با استفاده از اسکن لیزری زمینی و الگوریتم RANSAC. Remote Sens. 2014 , 6 , 4323–4344. [ Google Scholar ] [ CrossRef ]
- یانگ، بی. Zang, Y. ثبت خودکار ابرهای نقطه اسکن لیزری زمینی متراکم با استفاده از منحنی ها. ISPRS J. Photogramm. Remote Sens. 2014 ، 95 ، 109-121. [ Google Scholar ] [ CrossRef ]
- Conforti، D. اندازه گیری معادن روباز: آزمایش اسکنرهای لیزری ثابت و متحرک. GIM Int. 2010 ، 24 ، 17-19. [ Google Scholar ]
- آرمستو، جی. روکا-پاردینا، جی. لورنزو، اچ. آریاس، ص. مدلسازی شکل قوسهای بنایی با استفاده از دادههای اسکن لیزری زمینی و روشهای ناپارامتریک. مهندس ساختار. 2010 ، 32 ، 607-615. [ Google Scholar ] [ CrossRef ]
- هیرماگالور، جی. ین، ک. لاسکی، تی. روانی، ب. تست و ارزیابی عملکرد سیستم های اسکن لیزری سه بعدی زمینی ثابت برای کاربردهای بزرگراه. ترانسپ Res. ضبط J. Transp. Res. هیئت 2009 ، 2098 ، 29-40. [ Google Scholar ] [ CrossRef ]
- ژائو، اچ. شیباساکی، R. مدلسازی سطح اجسام سه بعدی شهری از دادههای برد لیزری حملونقل. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2002 ، 34 ، 412-417. [ Google Scholar ]
- لی، جی. چاپمن، MA نقشه برداری زمینی سیار به سمت جمع آوری داده های جغرافیایی زمان واقعی. در فناوری اطلاعات مکانی برای واکنش اضطراری ; زلاتانوا، اس.، لی، ج.، ویرایش. Taylor & Francis Group: Boca Raton، FL، USA، 2007; صص 103-119. [ Google Scholar ]
- سری لمنز، ام. ژئوتکنولوژی و محیط زیست. در اطلاعات جغرافیایی: فناوری، کاربردها و محیط زیست ؛ Springer: برلین، آلمان، 2011; جلد 5، ص 101-121. [ Google Scholar ]
- زو، ال. Hyyppa، J. استفاده از اسکن لیزری هوابرد و سیار برای مدلسازی محیطهای راهآهن به صورت سه بعدی. Remote Sens. 2014 , 6 , 3075–3100. [ Google Scholar ] [ CrossRef ]
- زو، ال. Hyyppä، J.; کوکو، ا. کارتینن، اچ. چن، آر. بازسازی ساختمان فوتورئالیستی از دادههای اسکن لیزری موبایل. Remote Sens. 2011 ، 3 ، 1406-1426. [ Google Scholar ] [ CrossRef ]
- یوچم، ا. هوفل، بی. Rutzinger، M. استخراج دیوارهای عمودی از دادههای اسکن لیزری سیار برای ارزیابی پتانسیل خورشیدی. Remote Sens. 2011 , 3 , 650-667. [ Google Scholar ] [ CrossRef ]
- گوان، اچ. لی، جی. یو، ی. وانگ، سی. چپمن، سی. یانگ، ب. استفاده از دادههای اسکن لیزری سیار برای استخراج خودکار علائم جاده. ISPRS J. Photogramm. Remote Sens. 2014 ، 87 ، 93-107. [ Google Scholar ] [ CrossRef ]
- گوان، اچ. لی، جی. یو، ی. چپمن، سی. وانگ، سی. Zhai، R. رای گیری تانسور تکراری برای استخراج ترک روسازی با استفاده از داده های اسکن لیزری سیار. IEEE Trans. Geosci. Remote Sens. 2015 ، 53 ، 1527-1537. [ Google Scholar ] [ CrossRef ]
- یو، ی. لی، جی. گوان، اچ. چپمن، ام. وانگ، سی. استخراج خودکار تیرهای چراغ خیابان از ابرهای نقطه لیدار متحرک. IEEE Trans. Geosci. Remote Sens. 2015 , 53 , 3. [ Google Scholar ] [ CrossRef ]
- یانگ، بی. نیش، ال. لی، کیو. لی، جی. استخراج خودکار علائم جاده از ابرهای نقطه لیدار متحرک. ISPRS Photogramm. مهندس Remote Sens. 2012 ، 78 ، 331-338. [ Google Scholar ] [ CrossRef ]
- هاتون، جی. دیدگاه هوایی: تغییر پارادایم در فناوری نقشه برداری موبایل. در دسترس آنلاین: http://archives.profsurv.com/magazine/article.aspx?i=70045 (در 1 اوت 2013 قابل دسترسی است).
- گولت، اف. ابوهادروس، آی. نشاشیبی، ف. عمون، س. Laurgeau, C. یک سیستم حسگر برد لیزری یکپارچه برای مدلسازی شهری و جادهای در مسیر. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2006 ، 34 ، 1-7. [ Google Scholar ]
- باربر، دی. میلز، جی. اسمیت-ویسی، اس. اعتبار سنجی هندسی یک سیستم اسکن لیزری متحرک زمینی. ISPRS Photogramm. مهندس Remote Sens. 2008 , 63 , 128-141. [ Google Scholar ] [ CrossRef ]
- گوان، اچ. لی، جی. یو، ی. وانگ، سی. اعتبارسنجی هندسی یک سیستم اسکن لیزری سیار یا برنامه های کاربردی شهری. در مجموعه مقالات MMT 2013، تاینان، تایوان، 1 تا 3 مه 2013.
- کارتینن، اچ. Hyyppä، J.; کوکو، ا. جااکولا، ا. Hyyppä, H. مقایسه عملکرد سیستمهای اسکن لیزری سیار با استفاده از یک میدان آزمایش دائمی. سنسورها 2012 ، 12 ، 12814-12835. [ Google Scholar ] [ CrossRef ]
- Ussyshkin، RV; بوبا، ام. توصیف عملکرد یک سیستم لیدار متحرک: متغیرهای مورد انتظار و غیر منتظره. در مجموعه مقالات کنفرانس سالانه ASPRS 2008، پورتلند، OR، ایالات متحده آمریکا، 28 آوریل تا 2 می 2008.
- لین، ی. Hyyppä، J.; Kukko، A. حالت Stop-and-Go: دستکاری حسگر به اندازه توسعه حسگر در اسکن لیزری زمینی ضروری است. سنسورها 2013 ، 13 ، 8140-8154. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Congalton، RG; Gree, K. Assessing The Accuracy of Remotely Sensed Data , 2nd ed.; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2009. [ Google Scholar ]
- کریگ، کارشناسی; استانداردهای دقت بررسی کاداستر Wahl، JL. Surv. Land Inf. علمی 2003 ، 63 ، 87-106. [ Google Scholar ]
- اولسن، ام جی; Roe، GV; گلنی، سی. پرسی، اف. ریدی، م. هورویتز، دی. ویلیامز، ک. توس، اچ. Squellati، A. نادلر، ام. راهنمای استفاده از LIDAR موبایل در برنامه های حمل و نقل . TRB: واشنگتن، دی سی، ایالات متحده آمریکا، 2013. [ Google Scholar ]
- لیم، اس. تاچر، سی. براک، جی. کیمبرو، دی. دانیلسون، جی. رینولدز، بی. ارزیابی دقت بررسی لیدار زمینی متحرک در ساحل ملی جزیره پادر. بین المللی J. Remote Sens. 2013 , 34 , 6355-6366. [ Google Scholar ] [ CrossRef ]
- تولید اکسلسون، P. DEM از دادههای اسکنر لیزری با استفاده از مدلهای TIN تطبیقی. حسگر از راه دور اسپات. Inf. علمی 1999 ، 33 ، 110-117. [ Google Scholar ]
- لی، جی. Guan، H. بازسازی ساختمان سه بعدی از ابرهای نقطه لیدار موجود در هوا که با تصاویر هوایی ترکیب شده است. در سنجش از دور شهری: پایش، سنتز و مدلسازی در محیط شهری . یانگ، ایکس، اد. جان وایلی و پسران: بوکا راتون، فلوریدا، ایالات متحده آمریکا، 2011; صص 75-92. [ Google Scholar ]
شکل 1. منطقه مورد مطالعه روستای معانشان: ( الف ) تصویر ماهواره ای که کل روستا را پوشش می دهد. و ( ب ) دو نمای نزدیک از دو خانه مسکونی در منطقه مورد مطالعه.
شکل 2. ( الف ) سه چرخه برقی MTLS راه اندازی شده برای روستای معانشان. ( ب ) مسیر رانندگی در اطراف روستا. ( ج ) داده های MTLS سه چرخه برقی روستا. ( د ) نمای نزدیک از داده های جمع آوری شده MTLS. و ( ه ) داده های رنگی MYLS مربوط به ( d ).
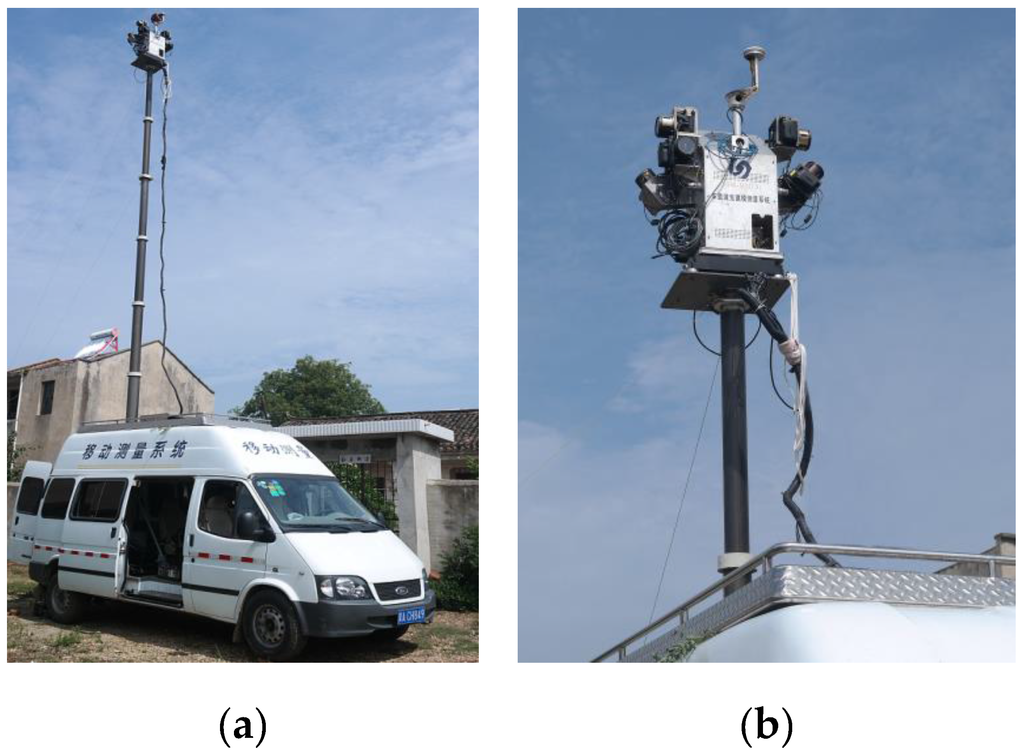
شکل 3. سیستم اسکن لیزری حالت توقف و حرکت: ( الف ) نمای فاصله. و ( ب ) نمای نزدیک.

شکل 4. ( الف ) ابر نقطه سه بعدی روستای معانشان از هشت ایستگاه جمع آوری و ادغام شده است. ( ب ) نمای نزدیک از نقاط رنگی. ( ج ) نمونه های ساختمانی مسدود شده توسط پوشش گیاهی متراکم.
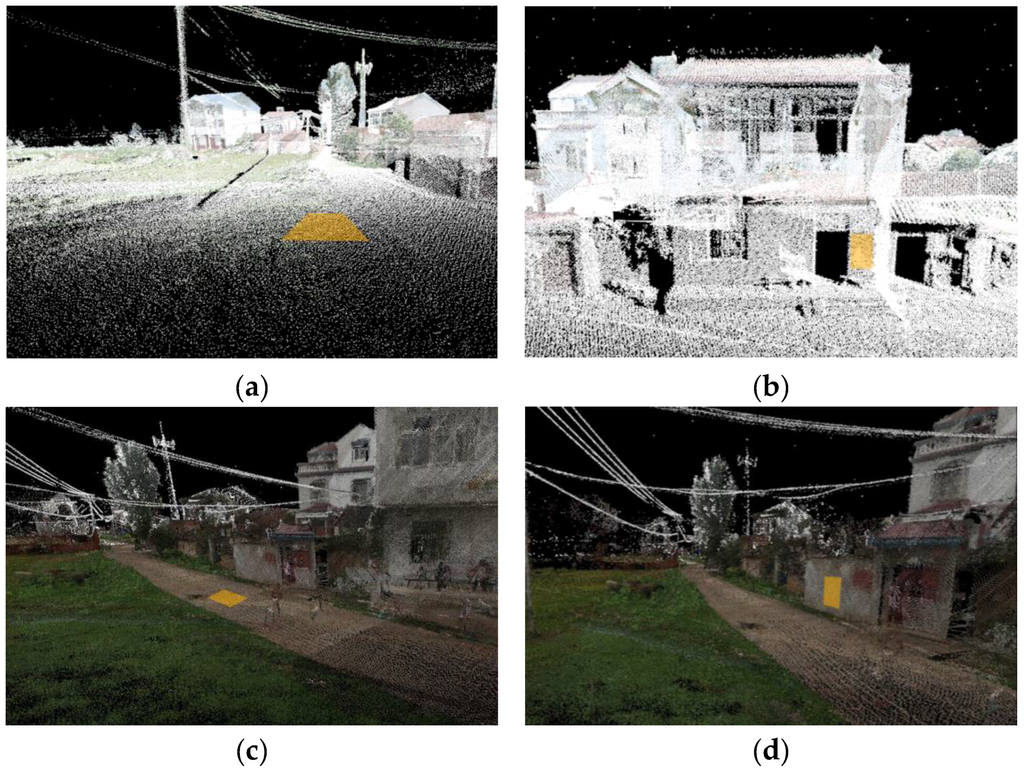
شکل 5. دقت ابرهای نقطه MTLS جمع آوری شده: ( الف ) ارتفاع. ( ب ) پلان سنجی برای سیستم توقف و حرکت SSW. ( ج ) ارتفاع؛ ( د ) پلان سنجی برای سیستم SSW الکترو سه چرخه.
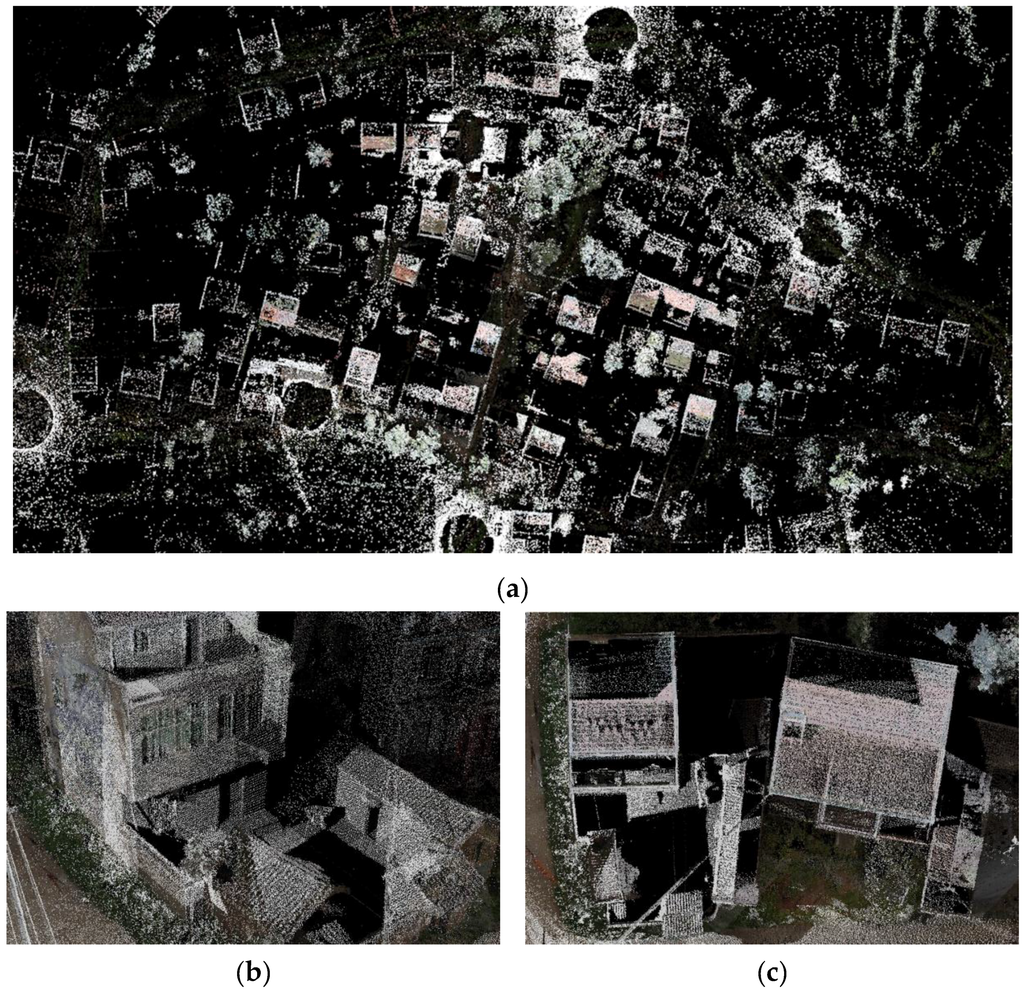
شکل 6. مجموعه داده های ذوب شده: ( الف ) مجموعه داده های ترکیب شده از سیستم های SWW stop-and-go و electro-tricycle. ( ب ) نمای نزدیک از یک خانه با جزئیات. و ( ج ) نمای نزدیک از خانه ها با جزئیات.
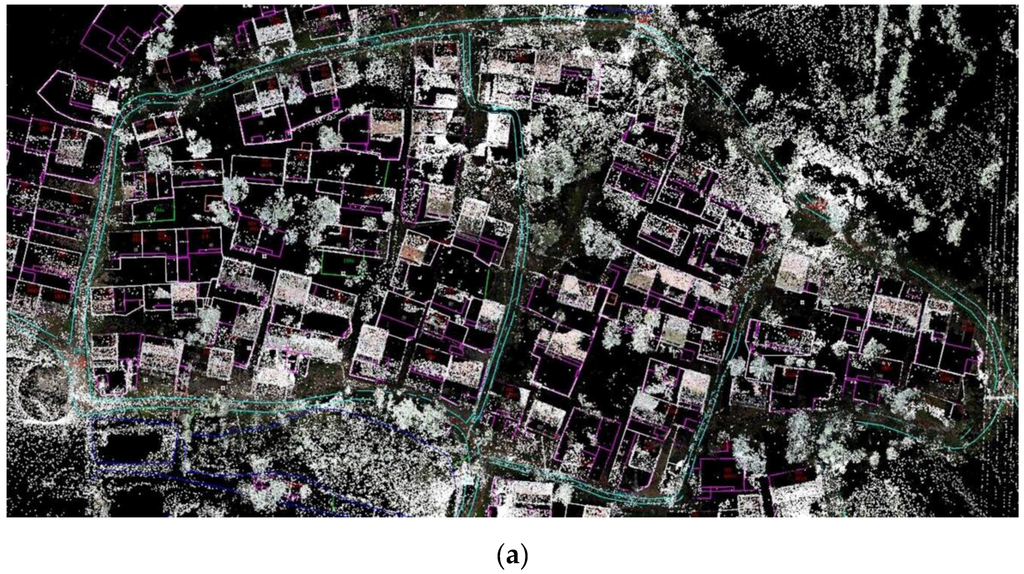
شکل 7. یک نتیجه مقایسه ای از: ( الف ) داده های ترکیب شده با نقشه برداری ساختمان (بنفش). ( ب ) خطوط ساختمانی استخراج شده (سفید)؛ و ( ج ) همپوشانی خطوط ساختمان استخراج شده و نقشه برداری ساختمان.

شکل 8. ( الف ) نمای نزدیک از نقاط ذوب شده. ( ب ) خطوط ساختمانی استخراج شده (سفید)؛ و ( ج ) روکشی از مرجع نگاشت استخراج شده و برداری (بنفش).

شکل 9. ( الف ) نمای نزدیک از نقاط ذوب شده. ( ب ) خطوط ساختمانی استخراج شده (سفید)؛ و ( ج ) روکشی از مرجع نگاشت استخراج شده و برداری (بنفش).

شکل 10. فاصله کمی مقایسه ای بین لبه های ساختمان استخراج شده و مراجع آنها حاصل می شود.

جدول 1. تجهیزات و ویژگی های سیستم لیزر SSW.
جدول 2. پارامترهای معادله جغرافیایی مرجع.
جدول 3. دقت و صحت اسکنر لیزری SSW در Planimetry و elevation (cm).
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر