

خلاصه
توزیع برجستگی ; BOVW ; اطلاعات معنایی ؛ طبقه بندی فازی
1. معرفی
2. روش پیشنهادی
2.1. تقسیم بندی برای تشخیص برجستگی
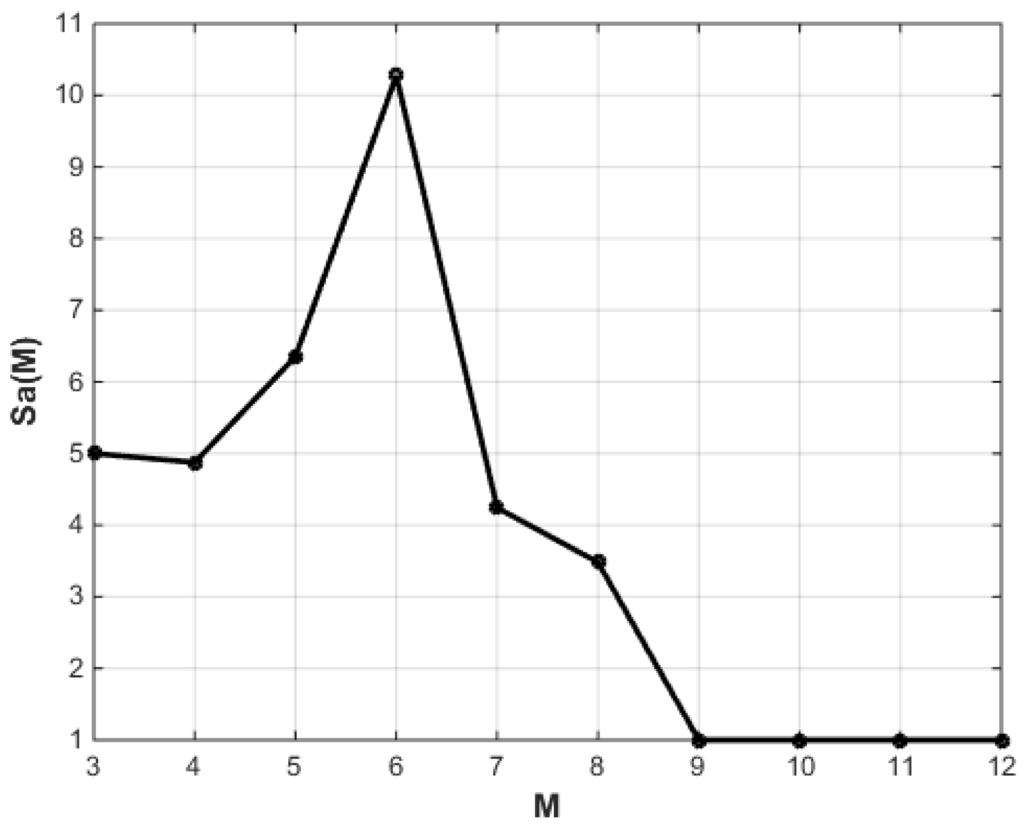
که در آن Num تعداد وصله های برجسته و M پارامتری است که نحوه اعمال تقسیم بندی را تعیین می کند.
که در آن AD1(M) قدر مطلق تفاوت بین MaxS1 و MinS1 است . MaxS1 و MinS1 به ترتیب حداکثر و حداقل مجموع هر ردیف در نقشه توزیع برجسته M × M مجموعه تصاویر با فرودگاه هستند. AD2(M) قدر مطلق تفاوت بین MaxS2 و MinS2 است . MaxS2 و MinS2 به ترتیب حداکثر و حداقل مجموع هر ردیف در نقشه توزیع برجسته M × M مجموعه تصاویر با اشیاء دیگر هستند. و Sa(M) نسبت استAD1 (M) تا AD2 (M) . در اینجا، Sa(M) بزرگتر نشان دهنده عملکرد بهتر در برجسته کردن تفاوت توزیع برجستگی بین دو مجموعه است. رابطه بین متغیر M و Sa(M) در شکل 2 نشان داده شده است . هر مجموعه آزمایشی شامل 50 تصویر است.
2.2. استخراج اطلاعات معنایی
2.3. روش مبتنی بر قانون فازی برای طبقه بندی مقدماتی
-
تصویر را به بلوک هایی با اندازه s×s با دو بلوک مجاور که در پیکسل های مرزی همپوشانی دارند، تقسیم کنید.
-
ستونی از کادرها را که با پیکسل شروع می شود با حداقل سطح خاکستری در بلوک اختصاص دهید.
-
برای اندازههای مختلف جعبهها، Ns را محاسبه کنید، تعداد کل جعبههایی که کل سطح تصویر را پوشش میدهند.
-
برای محاسبه بعد فراکتال، برازش خطی حداقل مربعات log(Ns) در مقابل log(s – 1) را رسم کنید.
-
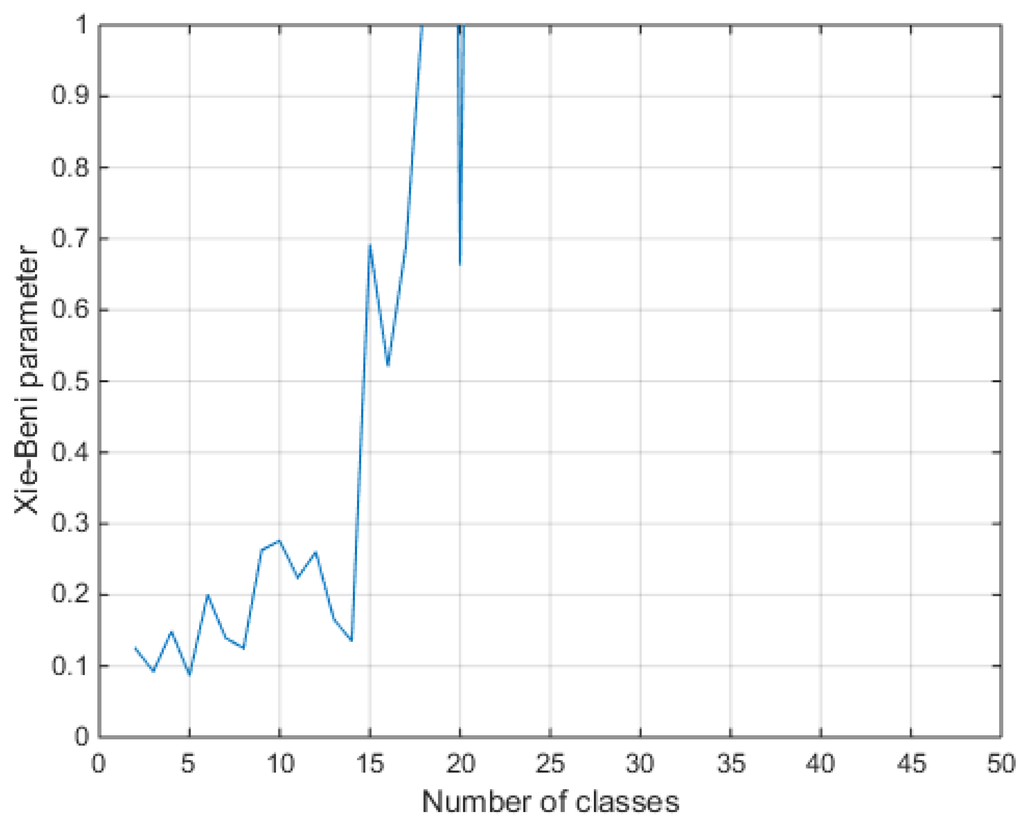
پس از محاسبه بعد فراکتال، میانگین C فازی برای تقسیم بیشتر گروه 2 به چندین گروه کوچکتر استفاده می شود. برای ارزیابی طبقه بندی، از شاخص Xie-Beni [ 40 ] برای تعیین تعداد کلاس ها استفاده می کنیم. شاخص Xie-Beni پارتیشن های C فازی فشرده و مجزا را مشخص می کند و شاخص Xie-Beni کوچکتر نشان دهنده طبقه بندی بهتر است. شکل 5 عملکرد تعداد کلاس های مختلف را نشان می دهد.
که در آن wordlist(ji) فهرست واژه های تصویر j در گروه i و Edi(jk) فاصله اقلیدسی بین فهرست واژه های تصویر j در گروه i و Avek است .
که در آن Ri(j, k) درجه همبستگی تصویر j در گروه i با گروه k است .
که در آن TH1 آستانه گروه 1 است، NUM گروه 1 تعداد تصاویر در گروه 1 و f1 میانگین درجه همبستگی تصویر گروه 1 است.
که در آن D 11 متغیر است.
2.4. طبقه بندی تفصیلی
3. آزمایش و تجزیه و تحلیل
3.1. مقایسه و تجزیه و تحلیل بین روش پیشنهادی و سایر روشها
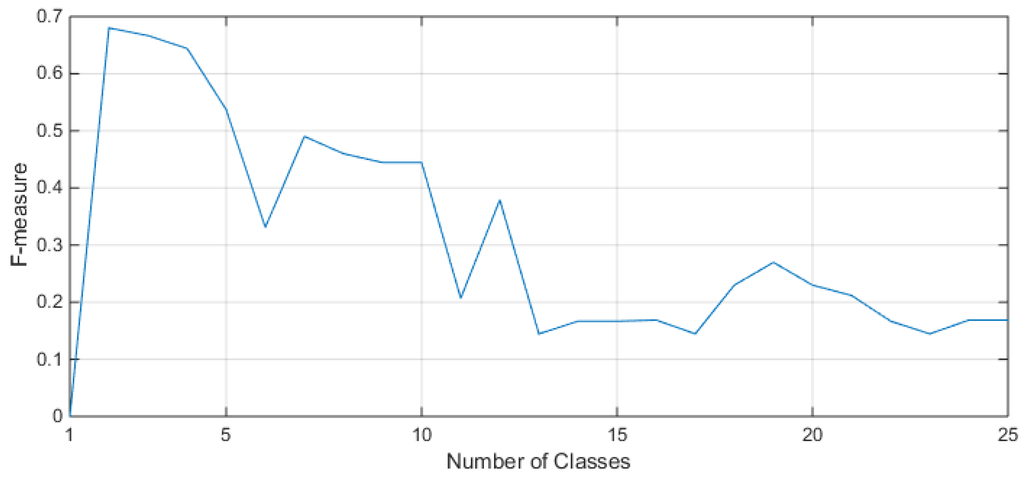
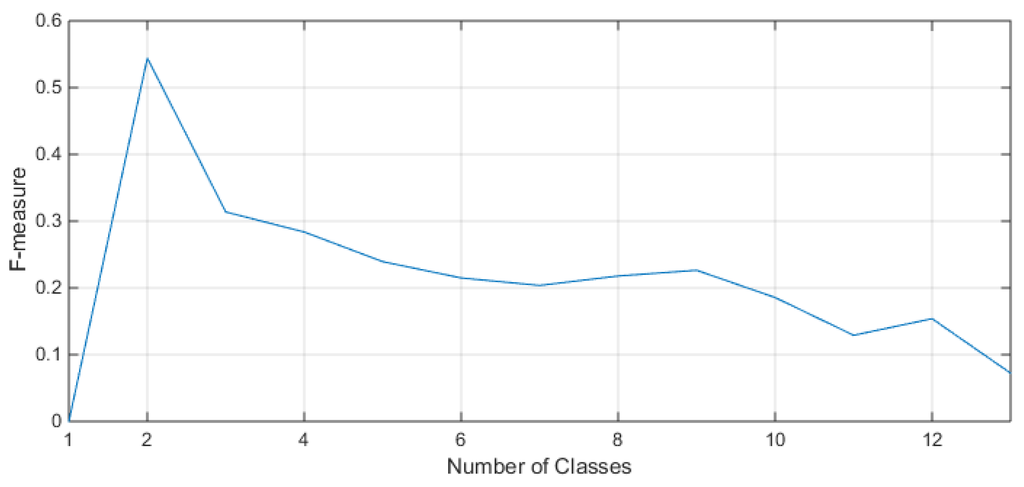
که در آن TP تعداد تصاویری است که به درستی به عنوان دارای فرودگاه طبقه بندی شده اند، FP تعداد تصاویری است که به اشتباه به عنوان دارای فرودگاه طبقه بندی شده اند، FN تعداد تصاویری است که به اشتباه به عنوان دارای اشیاء دیگر طبقه بندی شده اند و β a یک عدد واقعی غیر منفی است که ارائه می دهد. به عنوان شاخصی برای اهمیت نسبی دقت و یادآوری. یادآوری بالا به این معنی است که یک روش بیشتر اهداف را برمی گرداند، در حالی که دقت بالا به این معنی است که یک روش به طور قابل ملاحظه ای اهداف بیشتری را نسبت به سایر اشیاء غیر مرتبط برمی گرداند. F-measure میانگین هارمونیک دقت و یادآوری است. وزنهای β بزرگتر ، بیشتر از دقت را به یاد میآورند، در حالی که یک β کوچکتربیشتر بر دقت تاکید می کند تا یادآوری. در این برنامه، دقت بالا و فراخوانی بالا هر دو مورد نیاز است. بنابراین، باید دقت و یادآوری را به همان اندازه مهم در نظر بگیریم و β = 1 را انتخاب کنیم.
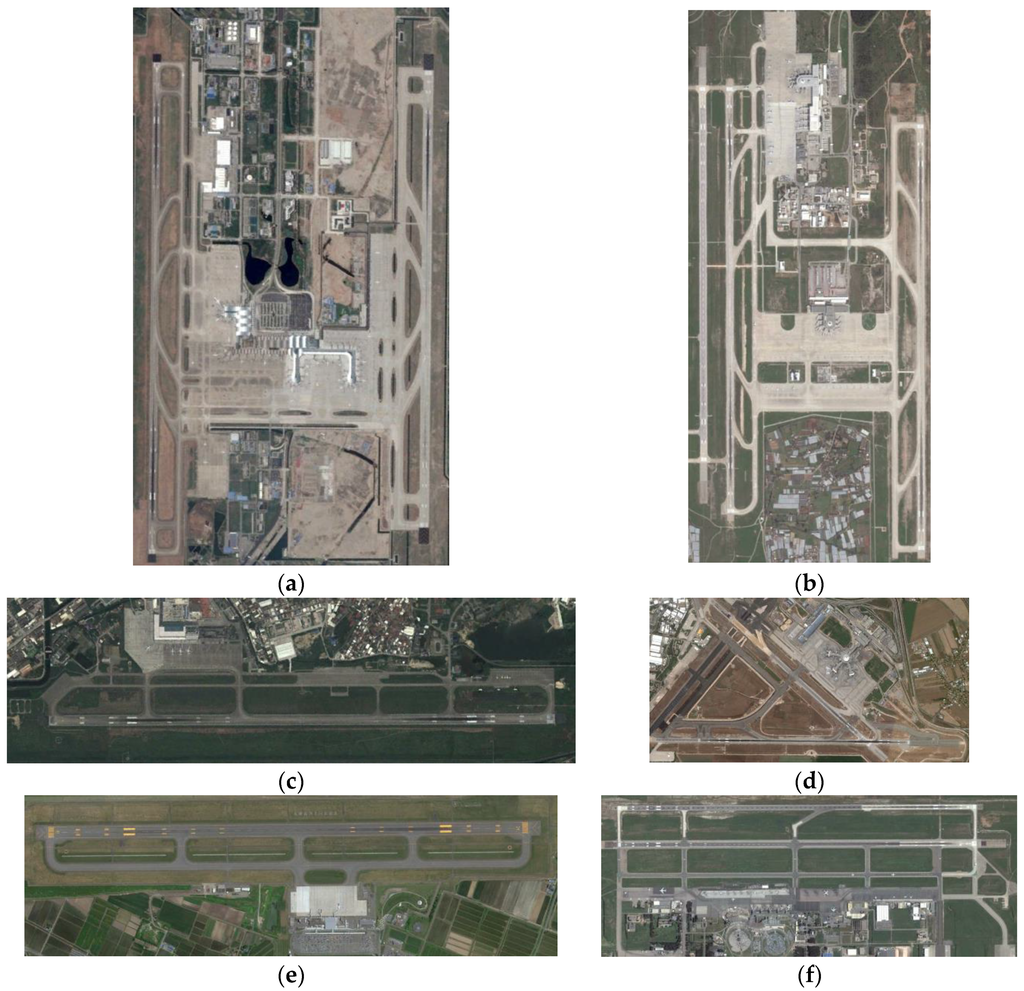
3.2. تجزیه و تحلیل عملکرد روش پیشنهادی در انواع مختلف فرودگاه ها
4. نتیجه گیری
منابع
- گامبا، پی. دل آکوا، اف. لیسینی، جی. بهبود استخراج جاده های شهری در تصاویر با وضوح بالا با استفاده از فیلتر جهت، گروه بندی ادراکی و مفاهیم توپولوژیکی ساده. IEEE Geosci. سنسور از راه دور Lett. 2006 ، 3 ، 387-391. [ Google Scholar ] [ CrossRef ]
- سکورد، جی. زاخور، الف. تشخیص درخت در مناطق شهری با استفاده از داده های لایدار هوایی و تصویری. IEEE Geosci. سنسور از راه دور Lett. 2007 ، 4 ، 196-200. [ Google Scholar ] [ CrossRef ]
- سیرماچک، بی. Unsalan، C. تشخیص منطقه شهری با استفاده از نقاط ویژگی محلی و رای گیری فضایی. IEEE Geosci. سنسور از راه دور Lett. 2010 ، 7 ، 146-150. [ Google Scholar ] [ CrossRef ]
- زویانگ، ک. ژنوی، اس. لیو، ال. تشخیص فرودگاه بر اساس آشکارساز بخش خط. در مجموعه مقالات کنفرانس بین المللی 2012 بینایی کامپیوتر در سنجش از دور (CVRS)، Xiamen، چین، 16-18 دسامبر 2012. صص 72-77.
- Huertas، A. کول، دبلیو. نواتیا، آر. تشخیص باند فرودگاه در صحنه های پیچیده فرودگاه. محاسبه کنید. Vis. نمودار. فرآیند تصویر 1990 ، 51 ، 107-145. [ Google Scholar ] [ CrossRef ]
- یین ون، دی. Bingcheng، Y.; هانگیو، دبلیو. ژائومینگ، اس. یک الگوریتم تشخیص باند بر اساس استخراج خط اکتشافی. در مجموعه مقالات کنفرانس بین المللی 2011 در تجزیه و تحلیل تصویر و پردازش سیگنال (IASP)، ووهان، چین، 21 تا 23 اکتبر 2011. صص 292-296.
- دهونگ، ال. لیهان، اچ. Carin, L. تشخیص فرودگاه در تصاویر نوری هوایی بزرگ. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد آکوستیک، گفتار و پردازش سیگنال، مونترال، کانادا، 17-21 مه 2004. جلد 765، صص 761–764.
- جون وی، اچ. لی، جی. یونگ شنگ، بی. روشی برای یافتن خودکار باندهای فرودگاه در تصاویر هوایی. در مجموعه مقالات ششمین کنفرانس بین المللی پردازش سیگنال 2002، پکن، چین، 26 تا 30 اوت 2002. جلد 731، ص 731–734.
- آیتکین، او. Zongur، U. هالیچی، تشخیص باند فرودگاه مبتنی بر بافت U. IEEE Geosci. سنسور از راه دور Lett. 2013 ، 10 ، 471-475. [ Google Scholar ] [ CrossRef ]
- چائو، تی. تان، ی. هواجی، سی. Jinwen، T. تشخیص فرودگاه از تصاویر ikonos بزرگ با استفاده از نقاط کلیدی غربال خوشهای و اطلاعات منطقه. IEEE Geosci. سنسور از راه دور Lett. 2011 ، 8 ، 128-132. [ Google Scholar ]
- وانگ، ایکس. وانگ، بی. Zhang, L. تشخیص فرودگاه در تصاویر سنجش از دور بر اساس توجه بصری. در پردازش اطلاعات عصبی؛ مجموعه مقالات هجدهمین کنفرانس بین المللی، ICONIP 2011، شانگهای، چین، 13–17 نوامبر 2011. Lu, B.-L., Zhang, L., Kwok, J., Eds.; Springer: برلین، آلمان، 2011; ص 475-484. [ Google Scholar ]
- McKeown، DM; هاروی، WA; مک درموت، جی. تفسیر مبتنی بر قانون از تصاویر هوایی. IEEE Trans. الگوی مقعدی ماخ هوشمند 1985 ، PAMI-7 ، 570-585. [ Google Scholar ] [ CrossRef ]
- Mckeown, D. Maps: سازماندهی یک سیستم پایگاه داده فضایی با استفاده از تصاویر، زمین و داده های نقشه. در مجموعه مقالات کارگاه آموزشی درک تصویر دارپا، آرلینگتون، ویرجینیا، ایالات متحده آمریکا، 23 ژوئن 1983. صص 105-127.
- Mckeown، D. کارتوگرافی دیجیتال و تفسیر عکس از دیدگاه پایگاه داده . Academic Press Professional, Inc.: San Diego, CA, USA, 1984. [ Google Scholar ]
- ژائو، دی. شی، ج. وانگ، جی. جیانگ، زی. یادگیری معنایی با محدودیت برجستگی برای تشخیص هدف فرودگاه از تصاویر هوایی. APPRES 2015 , 9 . [ Google Scholar ] [ CrossRef ]
- وانگ، جی. لی، جی. Wiederhold، G. Simplicity: تطبیق یکپارچه حساس به معنایی برای کتابخانه های تصویر. IEEE Trans. الگوی مقعدی ماخ هوشمند 2001 ، 23 ، 947-963. [ Google Scholar ] [ CrossRef ]
- اسمولدرز، AWM; نگران، م. سانتینی، اس. گوپتا، ا. جین، آر. بازیابی تصویر مبتنی بر محتوا در پایان سالهای اولیه. IEEE Trans. الگوی مقعدی ماخ هوشمند 2000 ، 22 ، 1349-1380. [ Google Scholar ] [ CrossRef ]
- ما، اچ. ژو، جی. لیو، MRT؛ King, I. پر کردن شکاف معنایی بین محتویات تصویر و برچسب ها. IEEE Trans. چندتایی. 2010 ، 12 ، 462-473. [ Google Scholar ] [ CrossRef ]
- تانگ، جی. ژا، زجی؛ تائو، دی. Chua، TS یادگیری فعال مبتنی بر شکاف معنایی برای حاشیه نویسی تصویر چند برچسبی. IEEE Trans. فرآیند تصویر 2012 ، 21 ، 2354-2360. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ژانگ، ال. Shum، HP; Shao, L. تجزیه و تحلیل زیرفضای معنایی متمایز برای بازخورد مربوط. IEEE Trans. فرآیند تصویر 2016 ، 25 ، 1275-1287. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- الکس، بی. دیزلرز، تی. فراری، V. شی چیست؟ در مجموعه مقالات کنفرانس IEEE 2010 در مورد بینایی کامپیوتری و تشخیص الگو، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 13 تا 18 ژوئن 2010. صص 73-80.
- گوفرمن، اس. زلنیک-منور، ال. تال، ای. تشخیص برجستگی با آگاهی از زمینه. IEEE Trans. الگوی مقعدی ماخ 2012 ، 34 ، 1915-1926. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لیو، تی. یوان، ز. سان، ج. وانگ، جی. ژنگ، ن. تانگ، ایکس. Shum، HY یادگیری برای تشخیص یک شی برجسته. IEEE Trans. الگوی مقعدی ماخ هوشمند 2011 ، 33 ، 353-367. [ Google Scholar ] [ PubMed ]
- یانگ، سی. ژانگ، ال. لو، اچ. روان، ایکس. یانگ، MH تشخیص برجستگی از طریق رتبه بندی چندگانه مبتنی بر نمودار. در مجموعه مقالات کنفرانس IEEE 2013 در مورد بینایی کامپیوتری و تشخیص الگو، پورتلند، OR، ایالات متحده آمریکا، 23 تا 28 ژوئن 2013. صص 3166–3173.
- لینفنگ، ایکس. هونگلیانگ، ال. Zhengning، W. تشخیص برجستگی از جاسازی مشترک نشانه های فضایی و رنگی. در مجموعه مقالات سمپوزیوم بین المللی IEEE در سال 2012 در مورد مدارها و سیستم ها، سئول، کره، 20-23 می 2012. صص 2673-2676.
- فن، ز. بو، دی. Liangpei، Z. یادگیری ویژگی بدون نظارت با هدایت برجسته برای طبقه بندی صحنه. IEEE Trans. Geosci. Remote Sens. 2015 , 53 , 2175–2184. [ Google Scholar ]
- یائو، ایکس. هان، جی. گوا، ال. اتوبوس.؛ لیو، زی. یک مدل درشت به ریز برای تشخیص فرودگاه از تصاویر سنجش از راه دور با استفاده از برجستگی بصری هدف گرا و CRF. محاسبات عصبی 2015 ، 164 ، 162-172. [ Google Scholar ] [ CrossRef ]
- فیفی، ل. Perona، P. یک مدل سلسله مراتبی بیزی برای یادگیری دسته بندی صحنه های طبیعی. در مجموعه مقالات کنفرانس IEEE Computer Society در سال 2005 در مورد دید رایانه و تشخیص الگو، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 20-25 ژوئن 2005. صص 524-531.
- بوش، آ. زیسرمن، آ. Muoz، X. طبقهبندی صحنه با استفاده از رویکرد مولد/تبعیض آمیز ترکیبی. IEEE Trans. الگوی مقعدی ماخ هوشمند 2008 ، 30 ، 712-727. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- سیویک، جی. Zisserman, A. Video google: رویکرد بازیابی متن برای تطبیق اشیا در ویدئوها. در مجموعه مقالات نهمین کنفرانس بین المللی IEEE در بینایی کامپیوتر، نیس، فرانسه، 13 تا 16 اکتبر 2003. جلد 1472، ص 1470–1477.
- Lowe, DG ویژگی های تصویر متمایز از نقاط کلیدی تغییرناپذیر مقیاس. بین المللی جی. کامپیوتر. Vis. 2004 ، 60 ، 91-110. [ Google Scholar ] [ CrossRef ]
- فیلبین، جی. چام، او. ایسارد، م. سیویک، جی. Zisserman، A. بازیابی اشیاء با واژگان بزرگ و تطابق سریع فضایی. در مجموعه مقالات کنفرانس IEEE 2007 در مورد بینایی کامپیوتری و تشخیص الگو، مینیاپولیس، MN، ایالات متحده، 17-22 ژوئن 2007. صص 1-8.
- پدروسا، جی وی؛ Traina، AJM; Traina, C. استفاده از فرهنگ لغت فرعی برای نمایش تصویر بر اساس رویکرد کیسه ای از کلمات بصری. در مجموعه مقالات بیست و هفتمین سمپوزیوم بین المللی IEEE در سال 2014 در سیستم های پزشکی مبتنی بر کامپیوتر، نیویورک، نیویورک، ایالات متحده آمریکا، 27-29 مه 2014. صص 165-168.
- روشا، BM; نوگیرا، EA؛ گولیاتو، دی. فریرا، DLP؛ Barcelos، CAZ بازیابی تصویر از طریق واگرایی i تعمیم یافته در چارچوب کیسه ای از کلمات بصری. در مجموعه مقالات بیست و یکمین کنفرانس بین المللی IEEE در سال 2014 در مورد الکترونیک، مدارها و سیستم ها (ICECS)، مارسی، فرانسه، 7 تا 10 دسامبر 2014. صص 734-737.
- ناگاراجان، جی. بازیابی اطلاعات معنایی چندوجهی مبتنی بر هستی شناسی فازی Minu، R. Procedia Comput. علمی 2015 ، 48 ، 101-106. [ Google Scholar ] [ CrossRef ]
- سو، جی. وانگ، بی. هسو، تی. چو، سی. Tseng، V. بازیابی تصویر چند وجهی با ادغام حاشیه نویسی تصویر وب، تطبیق مفهوم و تکنیک های رتبه بندی فازی. بین المللی J. فازی سیست. 2010 ، 12 ، 135-149. [ Google Scholar ]
- آتاناسیادیس، تی. میلوناس، پ. Avrithis، Y. کولیاس، اس. تقسیم بندی تصویر معنایی و برچسب گذاری اشیا. IEEE Trans. سیستم مدار. فناوری ویدئو 2007 ، 17 ، 298-312. [ Google Scholar ] [ CrossRef ]
- ژائوبائو، ز. لی، پی. Hong, Z. کاربرد درجه همبستگی تصویر در طبقه بندی فازی تصویر. Geomat. Inf. علمی دانشگاه ووهان 2015 ، 40 ، 574-577. (به زبان چینی) [ Google Scholar ]
- لی، جی. دو، س. Sun، C. یک روش شمارش جعبه بهبود یافته برای تخمین ابعاد فراکتال تصویر. تشخیص الگو 2009 ، 42 ، 2460-2469. [ Google Scholar ] [ CrossRef ]
- ژوانلی لیزا، ایکس. بنی، جی. معیار اعتبار برای خوشه بندی فازی. IEEE Trans. الگوی مقعدی ماخ هوشمند 1991 ، 13 ، 841-847. [ Google Scholar ]
- هافمن، تی. نمایه سازی معنایی نهفته احتمالی. در مجموعه مقالات بیست و دومین کنفرانس بین المللی سالانه ACM SIGIR در مورد تحقیق و توسعه در بازیابی اطلاعات، برکلی، کالیفرنیا، ایالات متحده آمریکا، 15 تا 19 اوت 1999. ACM: نیویورک، نیویورک، ایالات متحده آمریکا؛ صص 50-57.
- ژو، ز. زنگ، ی. لی، ی. ژانگ، ی. وانگ، پی. Luo, X. الگوریتمهای تشخیص و طبقهبندی آلودگی گیاه برنج بر اساس مقادیر ابعاد فراکتال و میانگین c فازی. ریاضی. محاسبه کنید. مدل. 2013 ، 58 ، 701-709. [ Google Scholar ] [ CrossRef ]
- بی، اچ. اس، ا. تویتلارس، تی. ون گول، ال. ویژگیهای قوی با سرعت بالا (موجگردی). محاسبه کنید. Vis. تصویر زیر. 2008 ، 110 ، 346-359. [ Google Scholar ] [ CrossRef ]
- داد، ال. Pepe, M. تخمین و رگرسیون auc جزئی. بیومتریک 2003 ، 59 ، 614-623. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- سلام.؛ اسکوبار، M. روش استنتاج آماری ناپارامتریک برای مناطق جزئی زیر منحنیهای مشخصه عملکرد گیرنده، با کاربرد در مطالعات ژنومی. آمار پزشکی 2008 ، 27 ، 5291-5308. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- مک کلیش، دی. تجزیه و تحلیل بخشی از منحنی ROC. پزشکی تصمیم می گیرد. ماک 1989 ، 9 ، 190-195. [ Google Scholar ] [ CrossRef ]








© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر