1. معرفی
تقسیم بندی ساختمان را می توان به عنوان فرآیند جداسازی ساختمان ها از سایر اشیاء مانند زمین طبیعی و مصنوعی، پوشش گیاهی و اشیاء شهری تعریف کرد. اولین تحقیقات در مورد استخراج اتوماتیک ساختمان در دهه 1980 آغاز شد. آنها از تصاویر هوایی استفاده کردند و بر استخراج دو بعدی و سه بعدی اولیه از تصاویر استریو تمرکز کردند. یکی از اشکالات اصلی این روش ها این است که برخی از موارد مثبت کاذب باید فیلتر شوند زیرا ممکن است برخی از ابتدایی های خطی با ساختارهای معنی دار مطابقت نداشته باشند. در بینایی کامپیوتری، تصاویر ارتفاعی به عنوان ساختارهای داده ای معرفی شدند که امکان دسترسی مستقیم به ویژگی های هندسی سه بعدی را فراهم می کردند. تصاویر ارتفاع اول عمدتاً از اشیاء و صحنههای کوچک و با استفاده از سیستمهای فعال به دست آمدهاند. در طول دهه 1990، اسکن لیزری هوایی (ALS) به طور گسترده در دسترس قرار گرفت. بنابراین تصاویر ارتفاعی از مناظر و شهرهای بزرگ امکان پذیر شد. دقت و چگالی نقطه ای این سیستم ها در حال پیشرفت مداوم است. اخیراً، سیستمهای اکتسابی جدید مانند اسکن لیزری زمینی (TLS) و اسکن لیزری متحرک (MLS) توسعه یافتهاند که نه تنها دقت هندسی بیشتر و چگالی بسیار بالا را اضافه میکنند، بلکه اسکنهای نما را نیز که از ALS قابل مشاهده نیستند، اضافه میکنند.1 ].
اگرچه پردازش دادههای سه بعدی شهری برای سالها در جریان بوده است، بخشبندی نما هنوز یک مشکل باز است. چندین مشارکت در این حوزه در این مقاله پیشنهاد شده است.
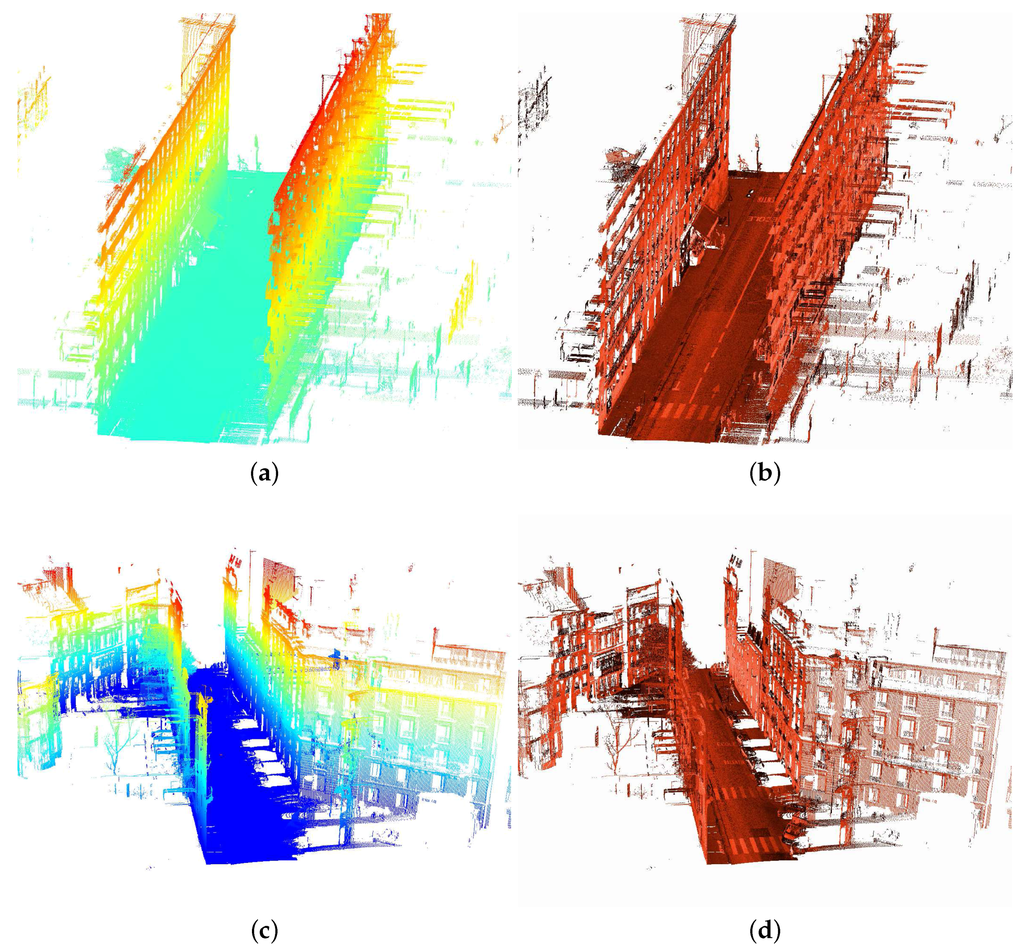
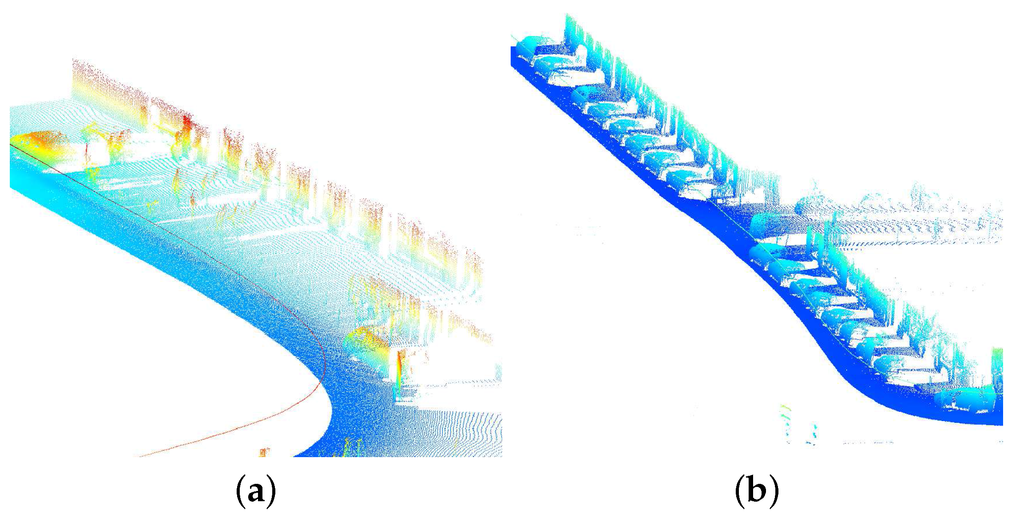
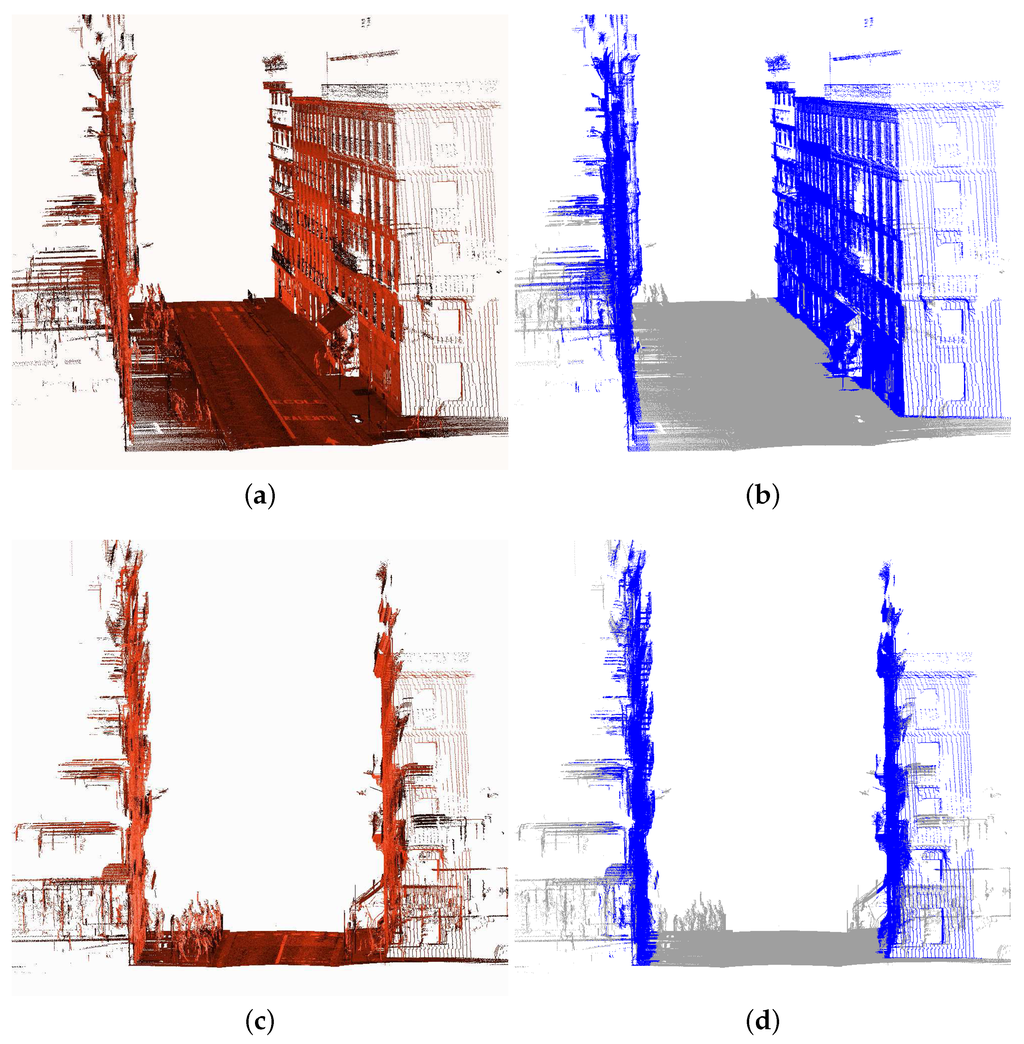
پردازش ما فرض می کند که زمین قبلاً بخش بندی شده است. در آثار خود از رویکردی که قبلاً در [ 2 ، 3 ] منتشر شده است استفاده کرده ایم. هنگامی که زمین قطعه بندی شد، تمام سازه های باقی مانده به عنوان نما و اشیا در نظر گرفته می شوند. همانطور که در شکل 1 نشان داده شده است، با استفاده از داده های TLS و MLS، تنها قسمت های جلوی ساختمان قابل مشاهده است . قابل توجه است که نماها بلندترین و طولانی ترین موجودیت های عمودی در صحنه شهری را تشکیل می دهند.
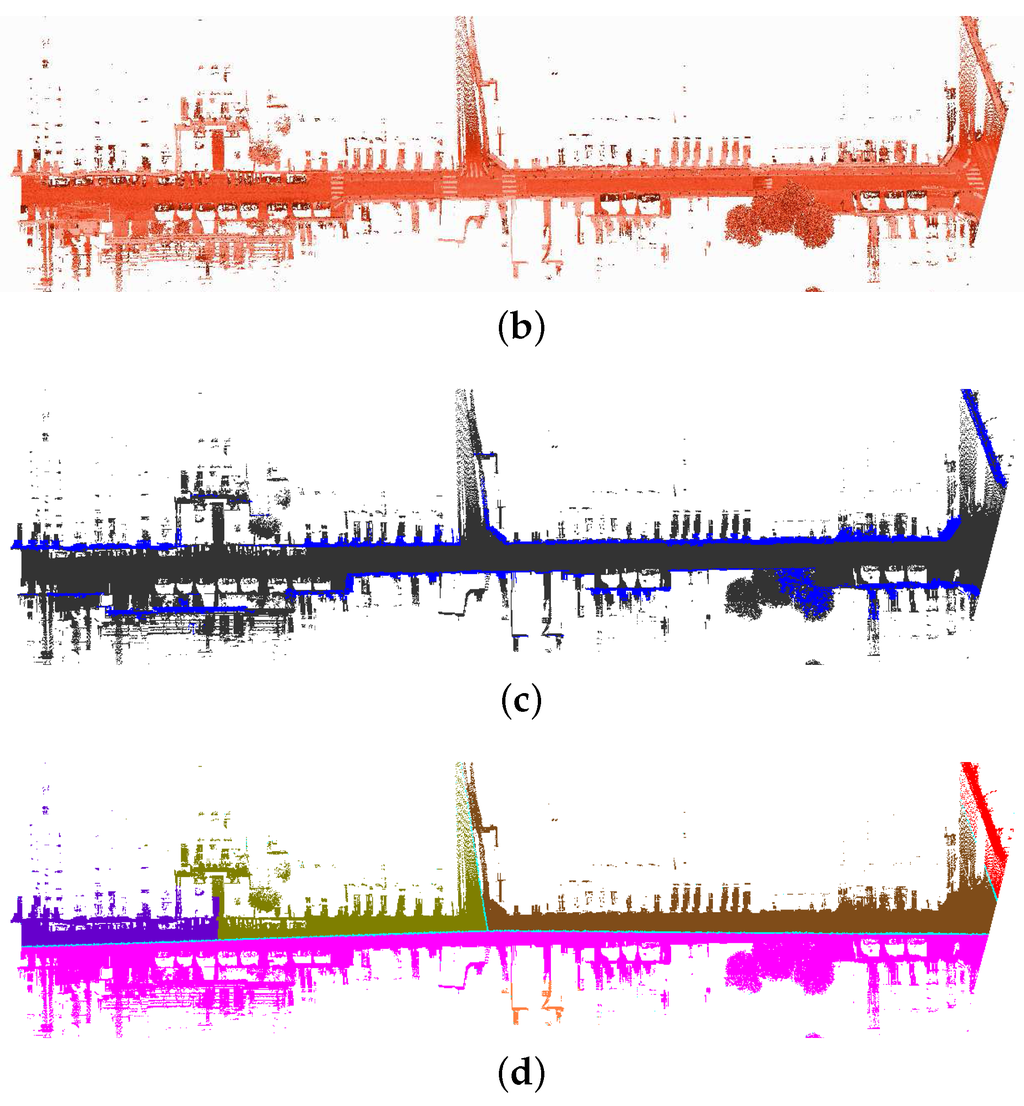
شکل 1. ابرهای نقطه سه بعدی از دو محل آزمایش در خیابان آساس در پاریس، فرانسه. Stereopolis II، IGN©. توجه داشته باشید که نماها بالاترین و طولانی ترین موجودیت های عمودی در صحنه شهری را تشکیل می دهند. ( الف ) ابر نقطه ای که با مختصات Z رنگ می شود. ( ب ) ابر نقطه ای رنگ شده با شدت. ( ج ) ابر نقطه ای رنگ شده با مختصات Z. ( د ) ابر نقطه ای که با شدت رنگ شده است.
این کار در چارچوب پروژه TerraMobilita [ 4 ] توسعه یافته است و به شرح زیر سازماندهی شده است. بخش 2 به بررسی آثار مرتبط در حال حاضر می پردازد. بخش 4 و بخش 5 دو رویکرد متفاوت را برای نماهای بخش معرفی می کنند: به ترتیب با و بدون نشانگر. بخش 6 روشی را برای بخشبندی بلوکهای شهر با استفاده از نتیجه تقسیمبندی نما توصیف میکند. در نهایت، بخش 8 این کار را به پایان میرساند.
2. کارهای مرتبط
گولت و همکاران [ 5 ] یک سیستم MLS به نام LARA-3D را توسعه میدهد که زمین، نماها و اشیاء را در زمان واقعی به دست میآورد و قطعهبندی میکند. زمین و نماها متناسب با سطوح افقی و عمودی تشخیص داده می شوند، سپس نقاط باقی مانده به عنوان اشیا در نظر گرفته می شوند. به روشی مشابه، Boulaassal et al. [ 6] نمای ساختمان با استفاده از الگوریتم RANSAC بر روی داده های TLS. به طور کلی، ثابت شده است که رویکردهای مبتنی بر استخراج صفحه ساده، سریع و مفید به عنوان ورودی برای رویکردهای سطح بالا اختصاص داده شده به ایجاد مدلهای هندسی دقیق هستند. با این حال، اشکال اصلی آنها این است که استخراج هواپیما ممکن است زمانی که زمین و نماها به اندازه کافی مسطح نیستند، شکست بخورد. علاوه بر این، نماها ممکن است به دلیل جزئیات معماری مانند بالکن ها، بیش از حد یا کم تقسیم شوند.
باب هادیاشار و قیصری [ 7 ] روشی را برای قطعه بندی سطوح مسطح و منحنی در تصاویر محدوده پیشنهاد می کنند. روش آنها شامل انتخاب مدل پارامتری مناسب است که انرژی کرنش سطوح نصب شده را به حداقل می رساند. نویسندگان روش خود را بر روی تصاویر محدوده داخلی پایگاه داده دانشگاه فلوریدا جنوبی (USF) اعمال کردند [ 8 ]. چندین کار در مورد مسئله برازش مدل پارامتری را می توان در ادبیات یافت [ 9 ، 10 ، 11 ، 12 ، 13]. این آثار را می توان به منظور تقسیم سطوح مانند زمین و نماها بر روی تصاویر ارتفاعی گسترش داد. اشکالات اصلی آنها این است که نیاز به یک تخمین مدل دارند که می تواند برای تصاویر مختلف متفاوت باشد، به دلیل روش های کمینه سازی زمان بر است و ممکن است باعث تقسیم بندی کمتر و بیش از حد شود.
Demantke و همکاران. [ 14 ] روشی را برای تطبیق همسایگی های کروی سه بعدی بر اساس ویژگی های محلی پیشنهاد می کند. انتخاب شعاع با بهینه سازی آنتروپی محلی انجام می شود. سپس ویژگی های ابعادی محاسبه می شوند. این ویژگی ها می توانند برای طبقه بندی سازه های یک بعدی مانند اشیاء قطب مانند، سازه های دوبعدی مانند زمین یا نماها و ساختارهای حجمی سه بعدی مانند درختان و اشیاء شهری مفید باشند.
هرناندز و مارکوتگی [ 2 ] فرض می کنند که نماها در یک خیابان هم تراز هستند، که در پایگاه داده پاریس-rue-Soufflot آنها تأیید شده است . آنها از تبدیل Hough برای یافتن جهت نما استفاده می کنند. سپس ارتفاع هر پروفیل را به منظور تشخیص نماها و بلوک های شهری تجزیه و تحلیل می کنند. Hammoudi [ 15 ] تکنیک مشابهی را بر اساس تبدیل احتمالی پیشرونده Hough به منظور تشخیص دیوارها و پنجره ها ارائه می دهد. او فرض می کند که نماهای ساختمان عمدتاً عمودی هستند، بنابراین می توان یک تصویر تجمعی برای محاسبه تعداد نقاط پیش بینی شده روی هر پیکسل تولید کرد.
آثار دیگری با هدف تقسیم بندی نماها در ادبیات موجود است [ 16 ، 17 ، 18 ، 19 ، 20 ، 21 ]. علاوه بر این، می توان از تصاویر رنگی برای غنی سازی بخش های نما استفاده کرد. به عنوان مثال، چندین اثر موجود در ادبیات از تصاویر رنگی برای تقسیم نماها با حفظ جزئیات معماری مانند بالکن ها و پنجره ها استفاده می کنند. سپس، از این نتایج برای رنگ آمیزی ابرهای نقطه سه بعدی استفاده می شود که یک رندر واقعی ارائه می دهد [ 22 ، 23 ، 24 ، 25 ، 26 ].
به طور کلی، روشهای مبتنی بر استخراج مسطح، تبدیل Hough و برازش مدل به اندازه کافی عمومی نیستند زیرا نماها میتوانند اشکال متفاوتی داشته باشند و شامل جزئیات معماری متفاوتی باشند. علاوه بر این، مشکل اشیاء لمس نما، مانند مبلمان شهری یا موتورسیکلت های پارک شده، به ندرت در ادبیات تحلیل می شود. در این مقاله، ما به این مشکلات می پردازیم و روش هایی را بر اساس ویژگی های هندسی و ازدیاد طول محاسبه شده بر روی تصاویر طرح ریزی شده پیشنهاد می کنیم. این روش ها برای استخراج نماهایی از چندین شکل و جداسازی صحیح اشیاء لمس کننده نما قوی هستند.
3. تصاویر پروجکشن
هنگامی که یک ابر نقطه سه بعدی به دست آمد، یک ساختار داده مناسب نه تنها برای بازرسی و تجسم کیفیت اطلاعات، بلکه برای پردازش راحت آن نیز مورد نیاز است. ابرهای نقطه ای به عنوان لیست های طولانی ارائه می شوند ( x ، y، z)(�,�,�)مختصات، احتمالاً با ویژگی هایی مانند شدت و رنگ. نقاط معمولاً به ترتیب خط اسکن فهرست می شوند که برای پردازش کارآمد مناسب نیستند. به عنوان مثال در یک ( x ، y، z)(ایکس،�،�)لیست، نمی توان به سرعت همسایگان یک نقطه را در شعاع مشخصی تعیین کرد. ساختارهای داده مانند تصاویر طرح ریزی، مثلث سازی Delaunay، octrees و درختان kD این نوع پردازش را امکان پذیر می کنند. انتخاب ساختار داده مناسب به برنامه وابسته است، علاوه بر این، ترکیب برخی از آنها برای دستیابی به نتایج بهتر در وظایف خاص مانند تجسم، فیلتر کردن، بخشبندی و طبقهبندی ممکن است [ 1 ].
همانطور که قبلا ذکر شد، روش ما بر اساس تصاویر طرح ریزی شده است. ابرهای نقطه سه بعدی به تصاویر ارتفاعی نمایش داده می شوند زیرا ساختارهای مناسبی برای تجسم و پردازش داده ها هستند. می توان از تمام مجموعه بزرگ ابزارهای پردازش تصویر موجود، به ویژه مورفولوژی ریاضی [ 27 ، 28 ] استفاده کرد. علاوه بر این، تصاویر را می توان به سرعت پردازش کرد، به طور ضمنی روابط همسایگی را تعریف کرد و به حافظه کمتری نسبت به داده های سه بعدی نیاز دارد. به طور کلی، ایده استخراج تصاویر ارتفاعی از ابرهای نقطه سه بعدی جدید نیست. با این وجود، توسعه الگوریتم های تحلیل شهری دقیق و سریع هنوز یک مشکل باز است.
تصاویر ارتفاعی ساختارهای 2.5 بعدی هستند که حاوی اطلاعات عمق در هر پیکسل هستند. آنها توسط یک طرح امدادی به یک هواپیمای دوربین مجازی تولید می شوند، به عنوان مثال ، عمق فاصله هر نقطه سه بعدی تا صفحه نمایش است. مدل دوربین پپیک تبدیل فرافکنی از آر3→ن2آر3→ن2، و می توان آن را در سه تبدیل متوالی به شرح زیر تجزیه کرد:
تعریف 1. اجازه دهید م= ( X، ی، ز)م=(ایکس،�،ز)یک نقطه سه بعدی باشد آر3آر3و m = ( u , v )متر=(تو،�)نقطه ای در فضای تصویر ن2ن2. مدل دوربین پپبه عنوان تبدیل های متوالی تعریف می شود:
جایی که، (جایکس،جy)(جایکس،ج�)نقطه تلاقی بین محور نوری و صفحه تصویر است، (کایکس،کy)(کایکس،ک�)تعداد پیکسل ها در واحد طول هستند، آرwآر�سیستم مختصات دنیای واقعی است، آرجآرجسیستم مختصات دوربین با مبدا در مرکز نوری است و آرrآر�سیستم مختصات صفحه نمایش است. دوربین مجازی طوری انتخاب می شود که:
-
در صفحه افقی با بردار معمولی قرار دارد n→= ( 0 , 0 , 1 )�→=(0،0،1)و عبور از پایین ترین نقطه ( 0 , 0 ,zm i n)(0،0،�مترمن�). بنابراین، ماتریس چرخش [ رئو تی ] _آر�تیبرابر با هویت است.
-
ابر نقطهای و صفحهنمایش بر مرکز ثقل ابر نقطهای متمرکز شدهاند. بنابراین، بردار ترجمه t برابر با مرکز ثقل، و نقطه تقاطع ( جایکس،جyجایکس،ج�) = (0، 0).
-
طرح ریزی به صورت املایی است. بنابراین، محور طرح متعامد به صفحه طرح ریزی است و مرکز طرح در بی نهایت قرار دارد. به این معنی، fo c = ∞��ج=∞، x =ایکسجایکس=ایکسجو y=Yج�=�ج.
با توجه به این مفروضات، تعداد پیکسل در واحد طول تنها پارامتر آزاد است. به منظور ساده سازی این انتخاب، فرض می کنیم کایکس=کy= kکایکس=ک�=ک. باید با دقت انتخاب شود. از یک طرف، اگر k خیلی کوچک باشد، جزئیات دقیق حفظ نمی شوند زیرا نقاط زیادی روی یک پیکسل نمایش داده می شود. از سوی دیگر، k بیش از حد بزرگ دلالت بر مشکلات اتصال و اندازه تصویر بزرگ دارد، که حاکی از زمان محاسباتی بالاتر است که دیگر استفاده از تصاویر ارتفاعی به جای ابرهای نقطه سه بعدی را توجیه نمی کند. این پارامتر از نظر کیفیت در مقابل زمان پردازش بسیار مهم است. در آزمایشات خود ما انتخاب کرده ایم k = 5ک=5پیکسل بر متر به لطف دانش پیشینی در مورد چگالی ابر نقطه ای.
در طول پروجکشن، چندین نقطه را می توان به یک پیکسل نمایش داد. بنابراین، چهار تصویر ارتفاع تعریف شده است:
-
تصویر حداکثر ارتفاع ( fm a x�مترآایکس)، یا به سادگی تصویر ارتفاع، حداکثر عمق را در بین تمام نقاط پیش بینی شده روی یک پیکسل ذخیره می کند.
-
تصویر حداقل ارتفاع ( fm i n�مترمن�)، حداقل عمق را در بین تمام نقاط پیش بینی شده روی یک پیکسل ذخیره می کند.
-
تصویر ارتفاع ( fh e i gh t�ساعتهمن�ساعتتی)، شامل تفاوت بین تصاویر حداکثر و حداقل ارتفاع است.
-
تصویر انباشته ( fa c c�آجج)، تعداد نقاط پیش بینی شده روی هر پیکسل را ذخیره می کند.
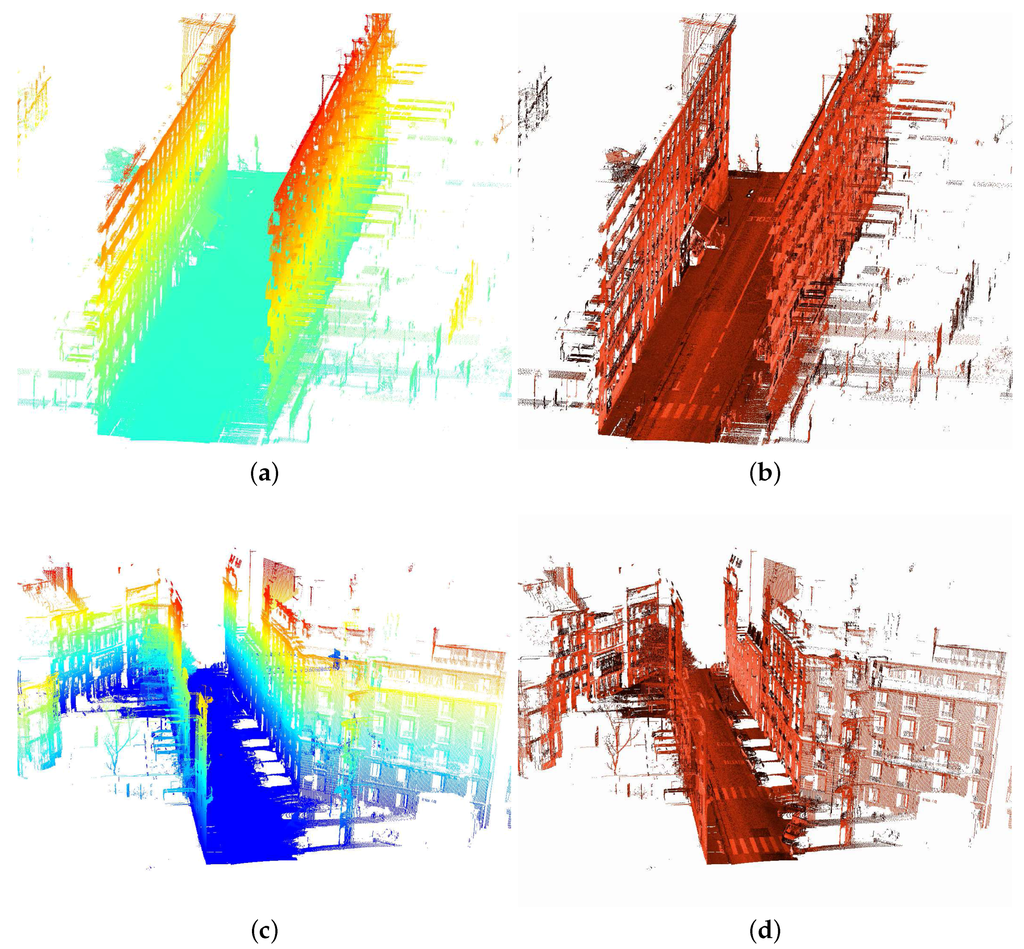
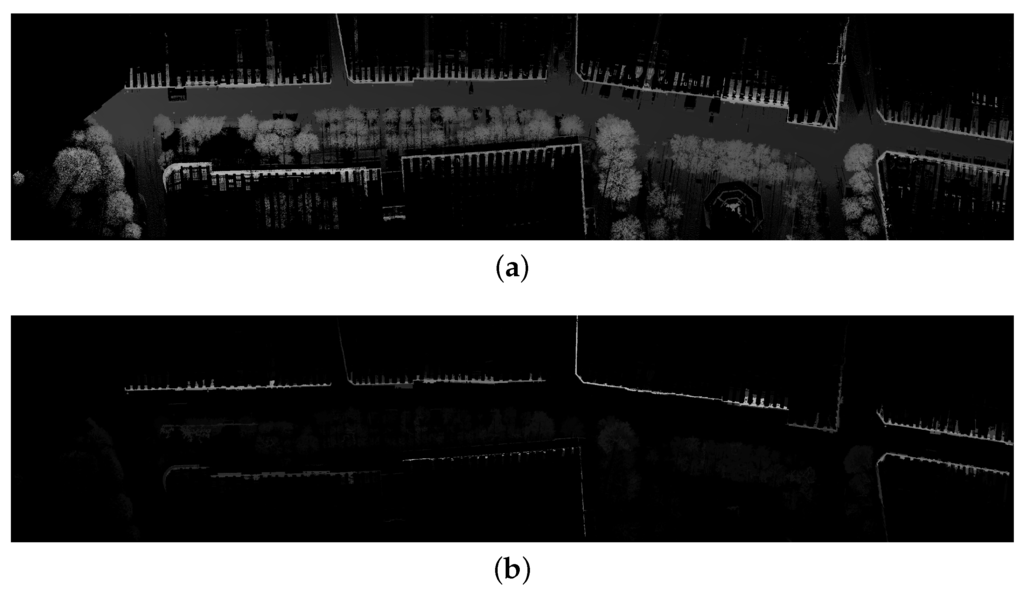
به طور کلی، مراحل پردازش با ترکیب این تصاویر انجام می شود و تصویر حاصل را می توان به ابر نقطه سه بعدی بازتاب داد. شکل 2 ابرهای نقطه سه بعدی و تصاویر ارتفاع را برای دو سایت آزمایشی پاریس ما نشان می دهد.
شکل 2. ابرهای نقطه سه بعدی و تصاویر ارتفاعی برای یک سایت آزمایشی در پاریس، فرانسه. داده های بدست آمده توسط Stereopolis II، IGN©France. ( الف ) Rue d’Assas: ابر نقطه; ( ب ) Rue d’Assas: تصویر ارتفاع.
پیشبینیهای تصویری حاکی از کاهش حجم دادههای مورد پردازش است. بنابراین، پردازش تصاویر 2.5 بعدی با استفاده از تکنیک های پردازش تصویر بسیار سریعتر از پردازش مستقیم نقاط سه بعدی است. علاوه بر این، روابط همسایگی در تصاویر بدون هیچ گونه محاسبات اضافی ارائه می شود. به منظور جلوگیری از مشکلات اتصال به دلیل انسداد یا ابرهای نقطه با متراکم کم، ممکن است یک درون یابی اعمال شود. این موضوع از حوصله این مقاله خارج است. برای جزئیات بیشتر در مورد درونیابی تصاویر ارتفاع، خواننده تشویق می شود به سرنا و مارکوتگی [ 3 ]، هرناندز و مارکوتگی [ 29 ] مراجعه کند.
4. تقسیم بندی نما با استفاده از نشانگرها
به منظور بخش بندی نماها، ما یک روش مبتنی بر نشانگر را با استفاده از محدودیت های هندسی پیشنهاد می کنیم. پس از استخراج نشانگر، بازسازی به منظور بدست آوردن کل نما اعمال می شود. اجازه دهید ابتدا استخراج نشانگر نما و سپس در بخش 4.2 روند بازسازی را توضیح دهیم.
4.1. استخراج نشانگر نما
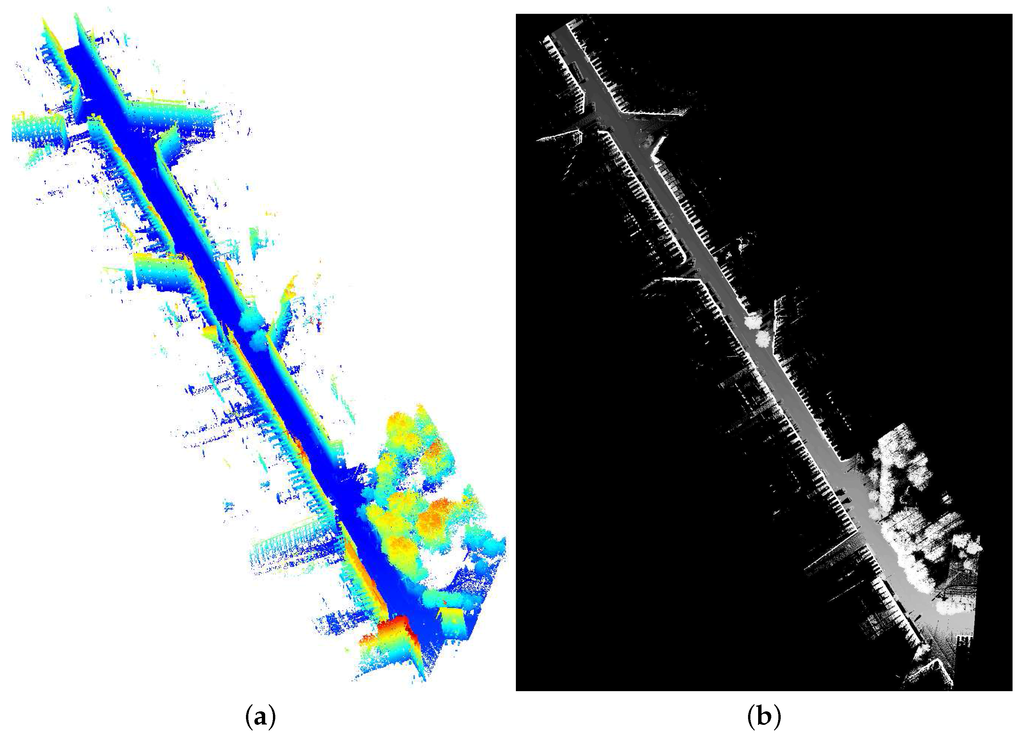
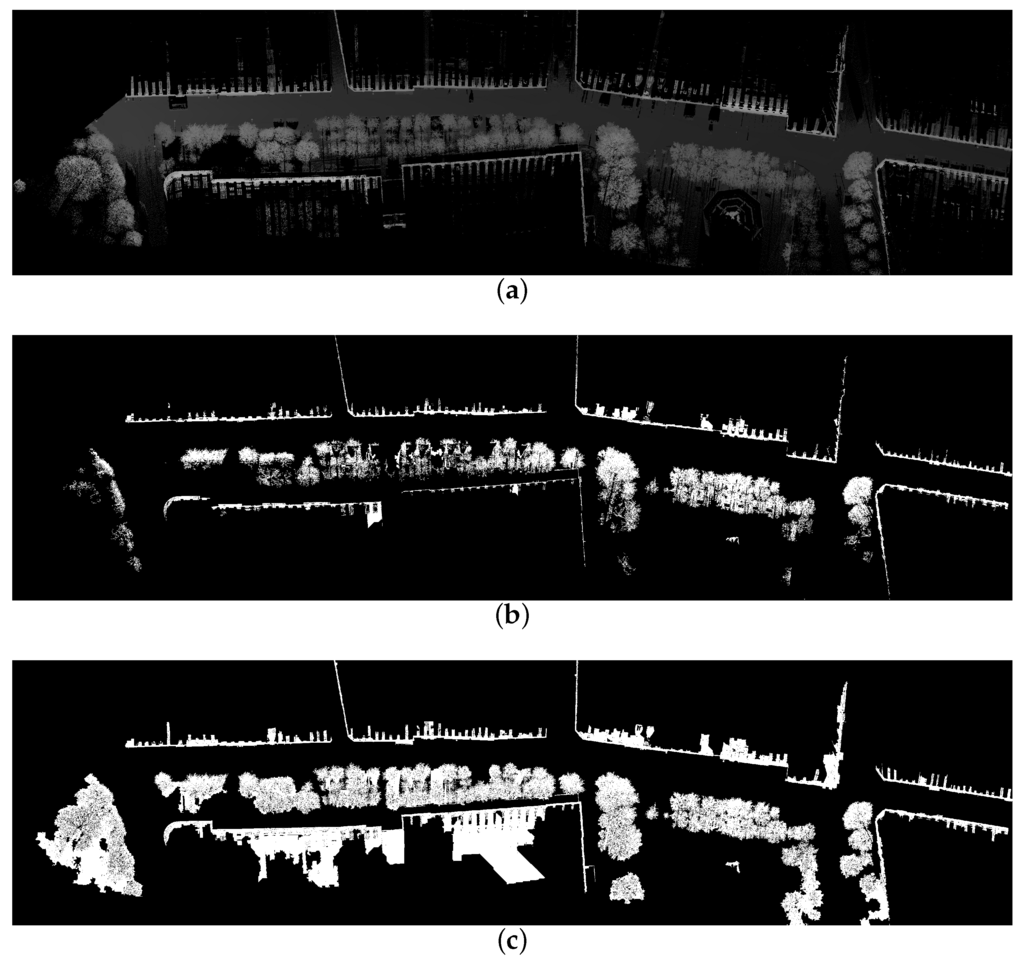
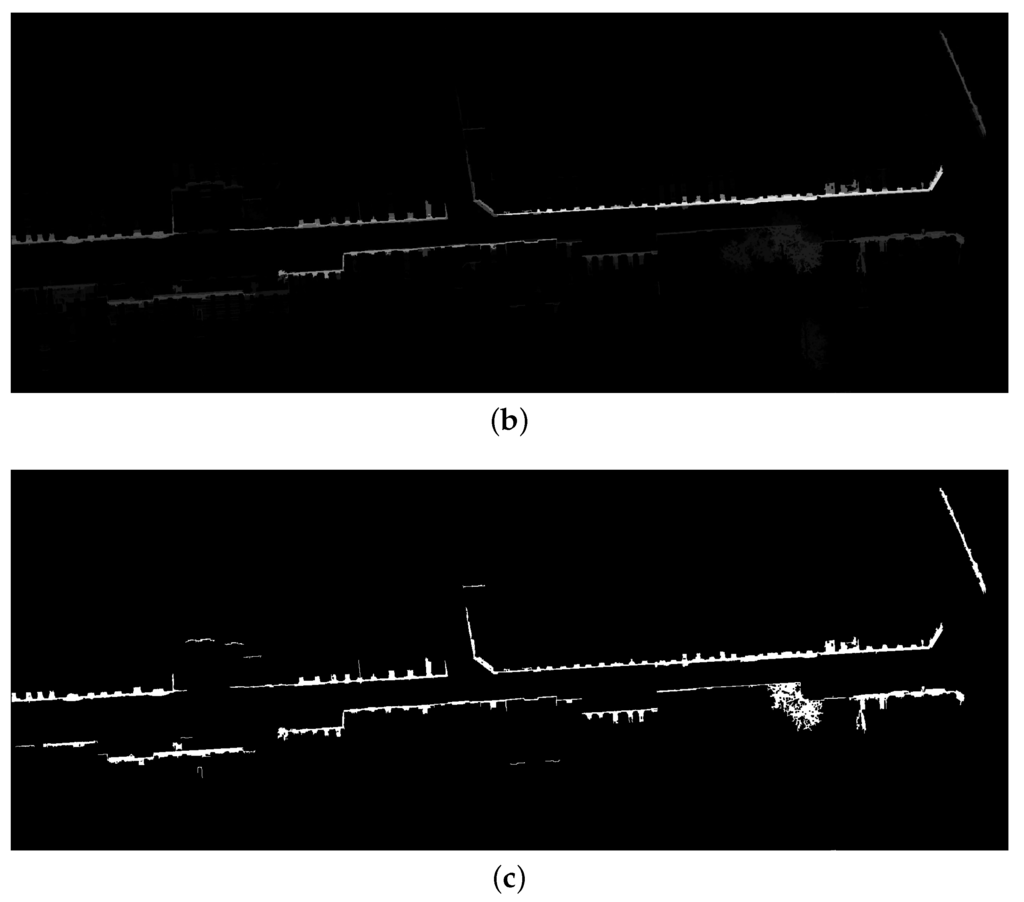
تصویر ارتفاع fارتفاع�ارتفاعبرای محاسبه نشانگرهای نما مناسب است زیرا حاوی اطلاعاتی در مورد ساختارهای بلند و عمودی است، همانطور که در شکل 3 نشان داده شده است .
شکل 3 a,b حداکثر را نشان می دهد fm a x����و حداقل fm i n����تصاویر ارتفاعی به ترتیب در حالی که شکل 3 ج تصویر ارتفاع را نشان می دهد.
از کار هرناندز و مارکوتگی [ 29 ]، ما از دو محدودیت هندسی زیر استفاده می کنیم. fارتفاع�heightبه منظور استخراج نشانگرهای نما:
-
ساعتm i nℎ���، تعیین حداقل ارتفاع مجاز نما. در آزمایشهای ما، این متغیر با توجه به ویژگیهای معماری پایگاههای داده ما روی 3.5 متر تنظیم شده است. این آستانه در شکل 4 الف نشان داده شده است. توجه داشته باشید که فقط بالاترین اشیاء حفظ می شوند.
-
Lm i n����، حداقل طول نما را تعیین می کند. در آزمایشهای ما، این متغیر با توجه به ویژگیهای معماری پایگاههای داده ما روی 5 متر تنظیم شده است. این آستانه در شکل 4 ب نشان داده شده است. توجه داشته باشید که اشیاء کوچک مانند تیر چراغ ها و اشیاء پشت نما به اندازه کافی بلند نیستند و سپس حذف می شوند.
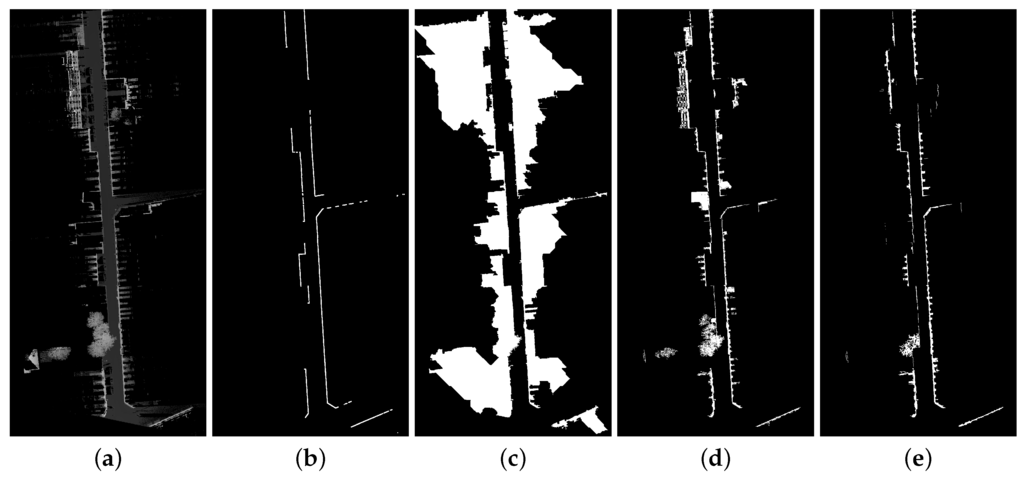
شکل 3. تصاویر ارتفاعی از یک مکان آزمایشی در خیابان d’Assas در پاریس، فرانسه. Stereopolis II، IGN©. ( الف ) تصویر حداکثر ارتفاع fm a x����; ( ب ) تصویر حداقل ارتفاع fm i n����; ( ج ) تصویر ارتفاع fارتفاع=fm a x–fm i n�height=����-����.
علاوه بر این، ما یک محدودیت سوم را برای حذف اشیاء گرد مانند درختان پیشنهاد می کنیم:
-
سیm i n����، حداکثر دایره نما مجاز را تعریف می کند (دایره بودن یک شی X به عنوان معکوس ازدیاد طول آن تعریف می شود. سیمن ج ( X _) = 1 / E( X)سیمن�ج(ایکس)=1/�(ایکس). در این کار، ما بر کشیدگی ژئودزیکی تمرکز می کنیم که به سادگی از این پس کشش نامیده می شود [ 30 ]. ازدیاد طول E( X)�(ایکس)یک شی X یک توصیف کننده شکل است که برای توصیف ساختارهای بلند و نازک مفید است. متناسب با نسبت بین قطر ژئودزیکی مربع است L2( X)�2(ایکس)و مساحت جسم A ( X)آ(ایکس)همانطور که در رابطه ( 2 ) نشان داده شده است. قطر ژئودزیکی L ( X) =شامx ∈ X{لایکس( X) }�(ایکس)=شامایکس∈ایکس{لایکس(ایکس)}طول طولانیترین قوس ژئودزیکی X است ، یعنی طولانیترین بخش داخلی لایکس( X)لایکس(ایکس)اتصال دو نقطه انتهایی X [ 31 ]. هر چه جسم بلندتر و باریکتر باشد، ازدیاد طول بیشتر می شود. پایین ترین کران با دیسک، جایی که E( X) = 1�(ایکس)=1. یک پیاده سازی کارآمد را می توان در Morard و همکاران یافت . [ 32 ].
در آزمایشات ما، سیm i nسیمترمن�به صورت اکتشافی تنظیم شده است 1/3 _ _1/3، که مربوط به دایره ای بیضی است که محور اصلی آن 3 برابر بیشتر از محور فرعی است. این مقدار برای فیلتر بالای درختان مناسب است زیرا دایره دایره برابر با 1 است. این آستانه در شکل 4 ج نشان داده شده است. توجه داشته باشید که اجسام غیر کشیده مانند دو درخت در سمت راست خیابان حذف شده اند.
با استفاده از این محدودیت ها، ما نشانگرهای نما را به عنوان اتحاد اجزای متصل (CC) بالاتر از ساعتm i nساعتمترمن�، طولانی تر از Lm i n�مترمن�و کمتر دایره ای از سیm i nسیمترمن�، همانطور که در تعریف 2 مشخص شده است:
تعریف 2. اجازه دهید fارتفاع�ارتفاعتصویر ارتفاع باشد fارتفاع�ارتفاع: D → V�→�، با D ⊂ز2�⊂ز2دامنه تصویر و V= [ 0 , . . . ، اچ]�=[0،...،اچ]مجموعه سطوح خاکستری که ارتفاع پیکسل را نگاشت می کند. اجازه دهید تیساعت (fh e i gh t)تیساعت(�ساعتهمن�ساعتتی)تصویر باینری حاوی پیکسل های بالاتر از ساعتm i nℎ���:
اجازه دهید سی1�1، سی2سی2،…، سیnسی�اجزای مرتبط تصویر باشند تیساعت (fh e i gh t)تیساعت(�ساعتهمن�ساعتتی):
سپس، نشانگرهای نما افm a r kافمترآ�کاجزای متصل هستند سیمنسیمناز تصویر تیساعت (fh e i gh t)�ℎ(�ℎ���ℎ�)که طولانی تر از Lm i n����و کمتر دایره ای از سیm i n����:
∀ j ∈ { 1 ، . . . , n }∀�∈{1،...،�}، جایی که L (سیj)�(سی�)و سیمن ج ( _سیj)سیمن�ج(سی�)به ترتیب قطر ژئودزیکی و دایره ای بودن جزء متصل می باشد سیjسی�.
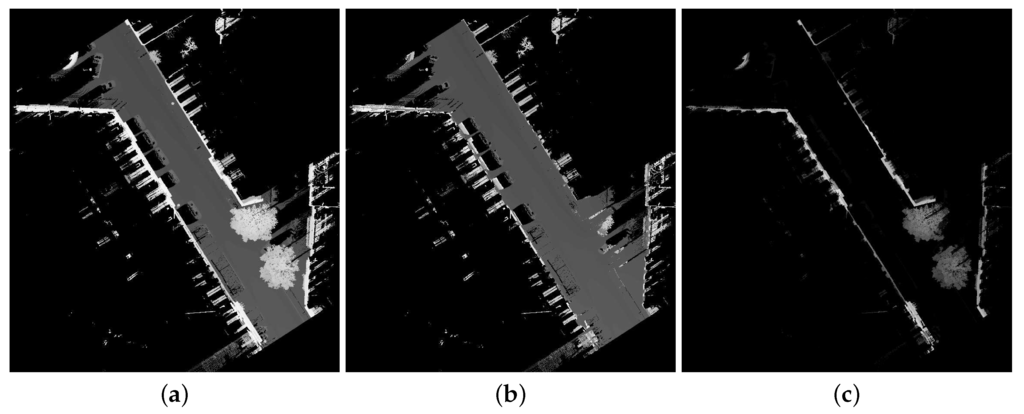
قابل ذکر است که این سه پارامتر ( ساعتm i nساعتمترمن�، Lm i n�مترمن�و سیm i nسیمترمن�) به راحتی تنظیم می شوند زیرا معنای فیزیکی دارند و به محدودیت های شهری/معماری بستگی دارند. شکل 4 این فرآیند انتخاب نشانگر را نشان می دهد.
شکل 4. استخراج نشانگر نما. نشانگرها با پیکسل های سفید نشان داده می شوند: ( الف ) نقاط بالاتر از ساعتm i nساعتمترمن�; ( ب ) امتیاز بالاتر از ساعتm i nساعتمترمن�و طولانی تر از Lm i n�مترمن�; ( ج ) نشانگرهای نما افm a r kافمترآ�ک: امتیاز بالاتر از ساعتm i nℎ���، طولانی تر از Lm i n����و کمتر دایره ای از سیm i n����. محل آزمایش در خیابان آساس (پاریس).
با توجه به الزامات خاص در مجموعه داده های TerraMobilita ما، چندین ابر نقطه سه بعدی با سیستم لیزری که روی زمین قرار گرفته اند به دست آمده اند. بنابراین، سازه های بالاتر از 2.5 متر خارج از میدان دید لیزر هستند، همانطور که در شکل 5 نشان داده شده است . این برای روشهایی که از محدودیتهای ارتفاعی استفاده میکنند چالش برانگیز است زیرا قطعات دیوار بلند قابل مشاهده نیستند.
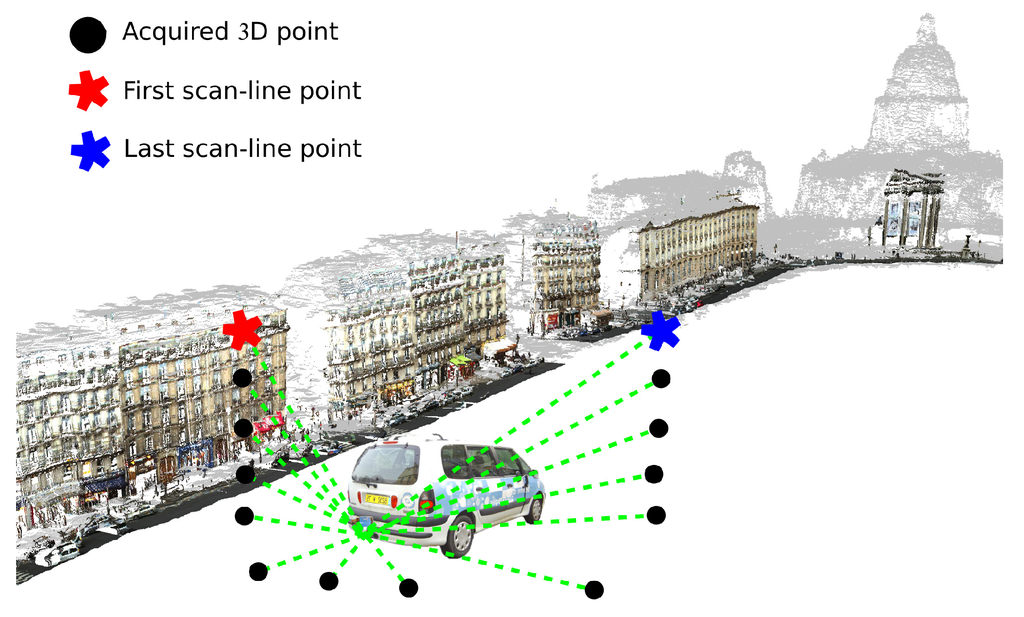
برای حل این مشکل، همانطور که در شکل 6 نشان داده شده است، راه حلی با بهره گیری از چرخه اکتساب حسگر MLS پیشنهاد می کنیم . در پیکربندی ما، سنسور با اسکن خطوط عمودی از بالا شروع به چرخش می کند. بنابراین، اولین و آخرین نقطه هر چرخش به ترتیب با بالاترین نقطه در سمت راست و در سمت چپ خیابان مطابقت دارد. این بالاترین نقاط معمولاً در نما قرار دارند و با تشخیص تغییرات علامت در زاویه فرورفتگی (محاسبه شده با استفاده از موقعیت سنسور) بین نقاط متوالی قابل استخراج هستند. سپس این نشانگرها به تصویر اضافه می شوند Th (fارتفاع)Th(�ارتفاع)و نقاط جدا شده با استفاده از فرآیند مشابه قبلی فیلتر می شوند: فقط نشانگرهایی طولانی تر از Lm i n�مترمن�و کمتر دایره ای از سیm i nسیمترمن�به عنوان نشانگر نما در نظر گرفته می شوند.
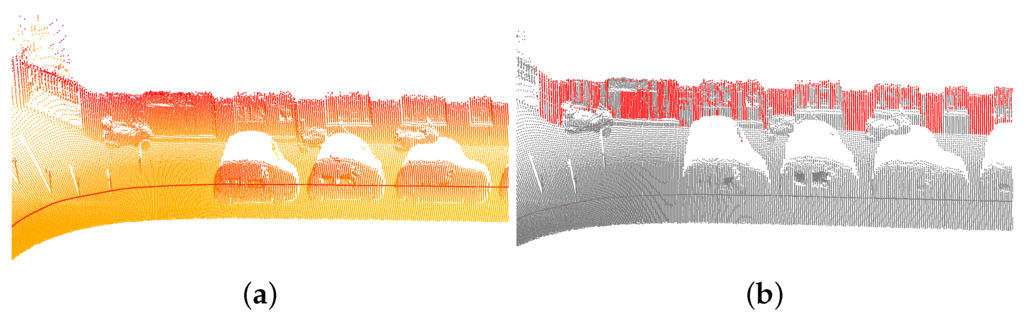
شکل 7 استخراج نشانگر نما را هنگامی که حسگر لیزری روی زمین قرار دارد نشان می دهد. شکل 7 ب نشانگرهای نما را نشان می دهد که روی ابر نقطه سه بعدی بازتاب داده شده اند. محل آزمایش مربوط به بخش خیابانی در خیابان Vaugirard در پاریس، فرانسه است.
شکل 5. ابرهای نقطه سه بعدی زمانی که لیزر به سمت زمین جهت گیری می کند. ابرهای نقطه سه بعدی بر اساس ارتفاع رنگ می شوند. ( الف ) خم و ( ب ) بخش های خیابان مستقیم در خیابان Vaugirard (پاریس). Stereopolis II، IGN©.
شکل 6. چرخه اکتساب اسکن لیزری سیار (MLS). اولین و آخرین نقطه به عنوان نشانگر نما در نظر گرفته شده است. محل آزمایش در خیابان سوفلوت در پاریس، فرانسه. LARA-3D، CAOR-MINES ParisTech©.
شکل 7. نشانگرهای نما که روی ابر نقطه سه بعدی بازتاب داده می شوند. در طی این اکتساب، حسگر لیزری به سمت زمین جهت گیری شد. توجه داشته باشید که نشانگرها فقط نمایانگر نماهای جزئی هستند، بنابراین، همانطور که در بخش 4.2 توضیح داده شد، یک فرآیند بازسازی نما مورد نیاز است . محل آزمایش در خیابان Vaugirard در پاریس، فرانسه. Stereopolis II، IGN©. ( الف ) ابر نقطه سه بعدی که با مختصات Z رنگ شده است. ( ب ) نشانگرهای نما (قرمز)، دیگر (خاکستری).
4.2. بازسازی نما از نشانگرها
همانطور که قبلا ذکر شد، نشانگرهای نما فقط شامل نماهای جزئی هستند. بنابراین، برای بازیابی کل نما باید یک بازسازی از آن نشانگرها اعمال شود. برای این منظور از بازسازی محدود شده توسط پسماند زمین استفاده می کنیم. فرض بر این است که زمین G قبلاً با استفاده از روش تقسیمبندی زمین پیشنهاد شده در [ 3 ، 29 ] یا هر روش دیگری که در ادبیات گزارش شده است [ 33 ، 34 ، 35 ، 36 ] محاسبه شده است.
بقایای زمین جیججیجبه عنوان تفاوت بین تصویر ارتفاع و تصویر زمین محاسبه می شود: جیج=fm a x– جیجیج=�مترآایکس–جی. سپس، اولین راه حل برای فرآیند بازسازی شامل مجموعه ای از افزایش اتساع ژئودزیکی است که تا زمان ناتوانی اعمال می شود. این تبدیل، بازسازی با اتساع [ 31 ] نامیده می شود و به صورت زیر تعریف می شود:
تعریف 3. بازسازی با اتساع. بازسازی با اتساع تصویر ماسک جیججیجاز یک نشانگر افm a r k≤جیجافمترآ�ک≤جیجبه عنوان اتساع ژئودزیکی تعریف می شود افm a r kافمترآ�کدر داخل جیججیجتا ناتوانی و با:
که در آن i اندازه اتساع ژئودزیکی است که برای آن عدم توانایی به دست آمده است، به عنوان مثال، δ( من + 1 )جیج(افm a r k) =δ( من )جیج(افm a r k)�جیج(من+1)(افمترآ�ک)=�جیج(من)(افمترآ�ک)
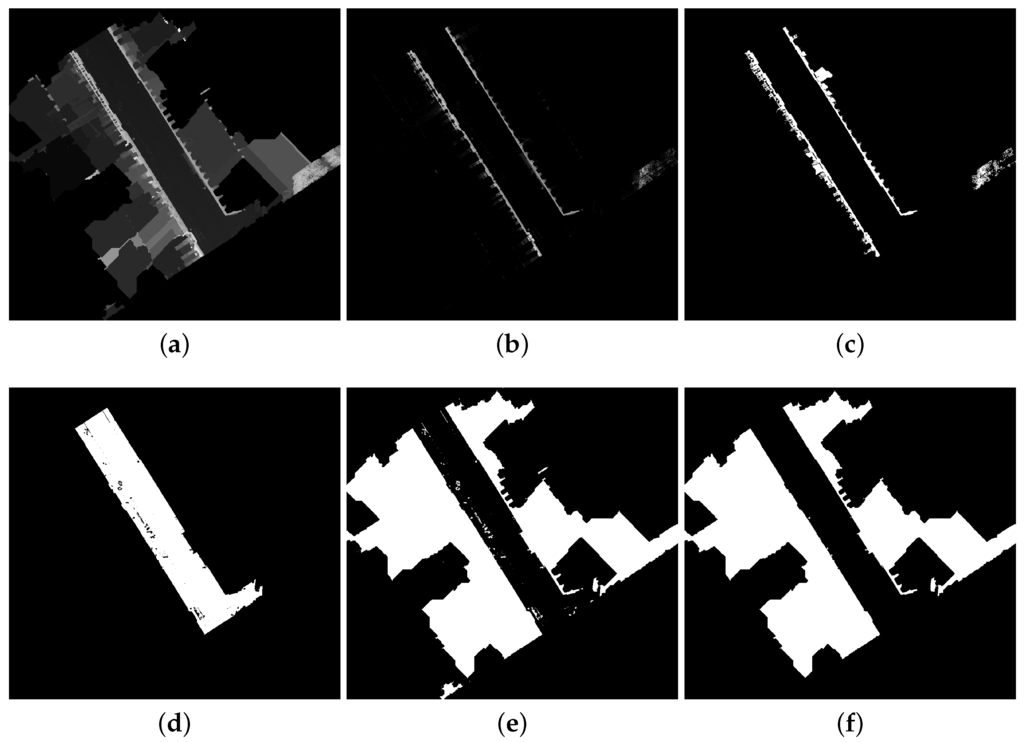
شکل 8 تقسیم بندی نما را بر اساس بازسازی با اتساع نشان می دهد. شکل 8 الف تصویر ارتفاع و شکل 8 ب تصویر ارتفاع متناظر آن. شکل 8 ج نشانگرهای نما را نشان می دهد افm a r kافمترآ�کبا روشی که در بخش 4.1 در بالا توضیح داده شد محاسبه شده است . شکل 8 d نتیجه تقسیم زمین G را نشان می دهد ، در حالی که شکل 8 e باقیمانده زمین را نشان می دهد. جیججیج. در نهایت، شکل 8 f تقسیم بندی نما را نشان می دهد که با بازسازی با اتساع بقایای زمین از نشانگرهای نما به دست آمده است. توجه داشته باشید که پیکسل های پشت نما در نتیجه تقسیم بندی گنجانده شده اند. اجرای این روش سریع و آسان است. با این حال، اشکال اصلی این است که اشیاء متصل به نما، به عنوان مثال، موتور سیکلت ها یا عابران پیاده که به دیوارها تکیه داده اند یا اشیاء پشت نما نیز بازسازی می شوند.
شکل 8. تقسیم بندی نما با استفاده از بازسازی با اتساع بر روی تصویر باقیمانده زمین از نشانگرهای نما. محل آزمایش در خیابان آساس در پاریس، فرانسه. Stereopolis II، IGN©. ( الف ) حداکثر تصویر ارتفاع fm a x�مترآایکس; ( ب ) تصویر ارتفاع fارتفاع�ارتفاع; ( ج ) نشانگرهای نما افm a r kافمترآ�ک; ( د ) تقسیم زمین G ; ( ه ) بقایای زمین جیج=fm a x– جی��=����-�; ( f ) تقسیم بندی نما با استفاده از بازسازی با اتساع: آرδجیج(افm a r k)����(�����).
شکل 9 و شکل 10 این نتیجه تقسیمبندی را نشان میدهند که روی ابر نقطه سه بعدی بازتاب داده شده است. توجه داشته باشید که بازسازی با اتساع نه تنها کل نما بلکه سایر اشیاء متصل به آن را نیز بازیابی می کند. به عنوان مثال در شکل 10 ، یک فروشگاه، یک عابر پیاده و یک علامت راهنمایی و رانندگی در پیاده رو سمت راست به اشتباه بازسازی شده است.
به منظور حل مشکل اشیاء در تماس با نما، ما یک بازسازی کنترل شده ویژگی از نشانگرهای نما را پیشنهاد می کنیم. این روش قبلاً در Serna و Marcotegui [ 19 ] منتشر شده است . از ضمیمه نقاط نزدیک با ارتفاع مشابه تشکیل شده است. فرآیند انتشار زمانی متوقف می شود که یک ویژگی معین به حداکثر مقدار خود برسد. در مورد ما، ما از افزایش انتشار نشانگرهای نما بر روی مناطق λ – مسطح استفاده میکنیم که در ادبیات مناطق شبه مسطح نیز نامیده میشود [ 37 ]. از آنجایی که نماها طولانیترین و کشیدهترین سازهها در تصویر ارتفاعی هستند، انتشار را حفظ میکنیم که ازدیاد طول ژئودزیک را به حداکثر میرساند.
اجازه دهید یک تعریف رسمی برای فرآیند بخشبندی نما با استفاده از بازسازی کنترلشده ویژگی معرفی کنیم:
تعریف 4. بازسازی کنترل شده صفت. اجازه دهید جیججیجیک تصویر دیجیتالی ارتفاعی حاوی بقایای زمین باشد جیج: D → Vجیج:�→�، با D ⊂ز2�⊂ز2دامنه تصویر و V= [ 0 , . . . ، اچ]�=[0،...،اچ]مجموعه سطوح خاکستری که مقادیر ارتفاع را نگاشت می کند. دو پیکسل همسایه p , qپ،�متعلق به همان منطقه λ-مسطح از جیججیج، اگر تفاوت مطلق آنها باشد |جیج( ص ) –جیج( ق) |جیج(پ)–جیج(�)کوچکتر یا مساوی با مقدار λ معین است.
برای همه x∈ _افm a r k⊆ Dایکس∈افمترآ�ک⊆�، اجازه دهید Λ مجموعه ای از مناطق افزایشی حاوی پیکسل نشانگر x باشد. برای همه λ ∈ V�∈�و j = [ 1 , . . . , n − 1 ]�=[1،...،�–1]، تعریف می کنیم آλ(افm a r k) ∈ Λآ�(افمترآ�ک)∈Λبه عنوان منطقه مسطح λ تصویر جیججیجحاوی نشانگر افm a r kافمترآ�ک:
اجازه دهید E(آλ(افm a r k) )�(��(�����))ازدیاد طول ژئودزیکی منطقه مسطح λ باشد آλ(افm a r k)��(�����). برای همه λمن∈ V��∈�و i = [ 0 , . . . , R ]�=[0,…,�]، تعریف می کنیم λم��به عنوان مقداری که ازدیاد طول برای آن حداکثر است:
سپس، تعریف می کنیم آλم(افm a r k)���(�����)به عنوان ویژگی کنترل بازسازی نما از نشانگر افm a r k�����.
با استفاده از این بازسازی کنترل شده به حداکثر رساندن طول ژئودزیکی، امکان بازسازی نما بدون ادغام اشیاء مجاور وجود دارد. شکل 9 روش های تقسیم بندی نما را با استفاده از بازسازی با اتساع مقایسه می کند آرδجیج(افm a r k)����(�����)و بازسازی کنترل شده صفت آλم(افm a r k)���(�����)، هر دو از نشانگر افm a r k����ک. قابل توجه است که نه اشیاء متصل به نما و نه اشیاء پشت آن توسط بازسازی کنترل شده با ویژگی دسترسی پیدا نکرده اند. شکل 10 d نتیجه تقسیمبندی را با استفاده از بازسازی کنترلشده با ویژگی بازپخش شده روی ابر نقطه سهبعدی نشان میدهد. در مقایسه با شکل 10 ب، توجه داشته باشید که فروشگاه، عابران پیاده و علائم راهنمایی و رانندگی در نما لحاظ نشده است. علاوه بر این، چندین شی مانند چراغ های دیواری و اشیاء پشت نما به درستی از هم جدا شده اند.
شکل 9. مقایسه روشهای تقسیمبندی نما با استفاده از بازسازی با اتساع و بازسازی کنترلشده ویژگی بر روی تصویر باقیمانده زمین. محل آزمایش در خیابان آساس در پاریس، فرانسه. Stereopolis II، IGN©. ( الف ) نشانگرهای نما افm a r kافمترآ�ک; ( ب ) بازسازی با اتساع آرδجیج(افm a r k)آرجیج�(افمترآ�ک); ( ج ) بازسازی کنترل شده صفت آλم(افm a r k)آ�م(افمترآ�ک).
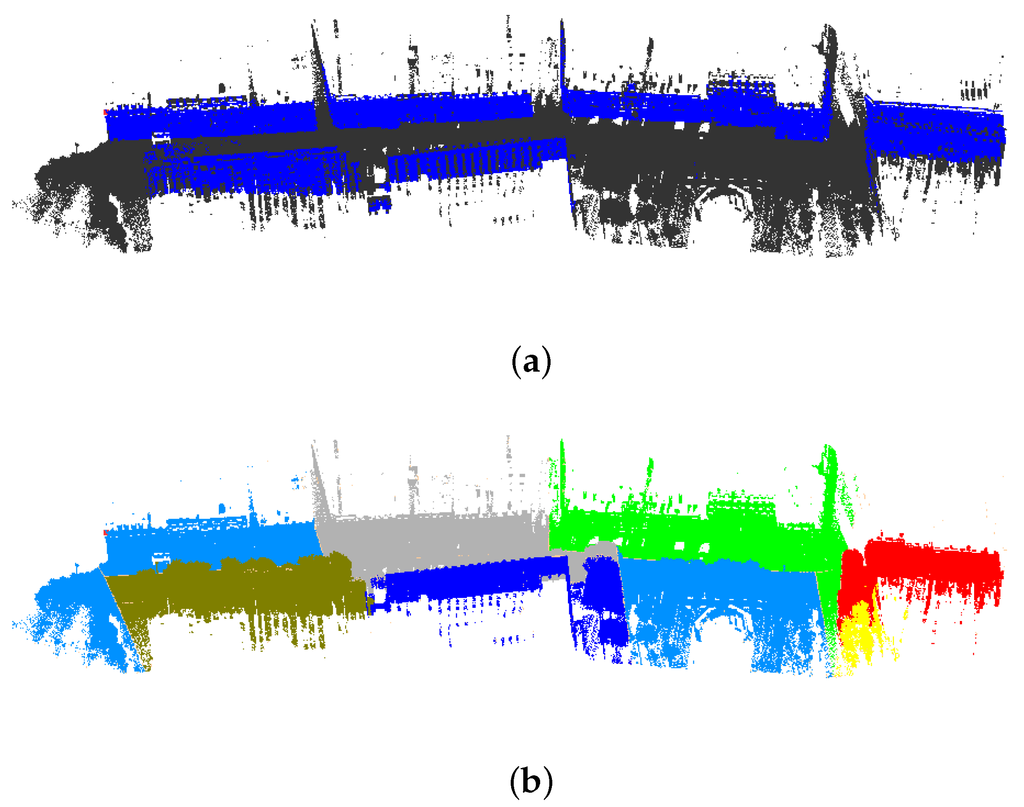
شکل 10. نتیجه تقسیمبندی نما که روی ابر نقطه سهبعدی بازپخش شده است. تصاویر مربوط به دو نمای متفاوت از یک مکان آزمایشی در خیابان داساس در پاریس، فرانسه است. Stereopolis II، IGN©. ( الف ) ابر نقطه ای که با شدت لیزر رنگ شده است. ( ب ) نتیجه تقسیم بندی: نما (آبی)، دیگر (خاکستری). نما با استفاده از بازسازی با اتساع بر روی تصویر باقیمانده زمین از نشانگرهای نما تقسیم شده است. ( ج ) ابر نقطه ای رنگ شده با شدت لیزر. ( د ) نتیجه تقسیم بندی: نما (آبی)، دیگر (خاکستری). تقسیم بندی نما با استفاده از بازسازی کنترل شده با ویژگی بر روی تصویر باقیمانده زمین.
4.3. بحث
روشهای مبتنی بر نشانگرها برای بخشبندی نماهای غیرمسطح و نماهایی با چندین جزئیات معماری و بالکن قوی هستند، در ساختمانهای پاریسی چنین است. علاوه بر این، این روشها ساده و سریع هستند زیرا مبتنی بر محدودیتهای هندسی هستند که به راحتی به مقادیر آستانه ترجمه میشوند. در مورد نماهای کم یا زمانی که حسگر لیزر به سمت زمین است، نشانگرهای اضافی مربوط به بالاترین نقاط هر چرخه لیزر اضافه می شود. از آنجایی که نشانگرها فقط شامل نماهای جزئی هستند، برای بدست آوردن کل نما نیاز به بازسازی است. در مورد ما، بازسازی به باقیمانده زمین محدود می شود.
در این بخش، ما دو بازسازی را پیشنهاد کردهایم: (1) بازسازی کلاسیک با اتساع. (ب) بازسازی مبتنی بر انتشار کنترل شده با ویژگی. عملکرد این روش ها به شدت به انتخاب نشانگرها بستگی دارد. یک نشانگر اشتباه ممکن است خطا ایجاد کند زیرا شیء علامت گذاری شده را بازسازی می کند، حتی اگر نما نباشد. در آزمایشهای ما، روش انتخاب نشانگر ما در بسیاری از موارد کارآمد است. با این حال، اشیایی مانند ترازهای درختی ممکن است نشانگرهای نادرست تولید کنند، بنابراین تقسیم بندی اشتباه، همانطور که در شکل 11 نشان داده شده است.. دلیل این مشکل این است که معیار دایرهای ما در فیلتر کردن ردیفهای درختان شکست میخورد زیرا ممکن است ردپای آنها به اندازه کافی دراز باشد. تغییر مقدار دایره ای بودن ایده خوبی به نظر نمی رسد. از یک طرف، کاهش مقدار دایرهای بر فراخوانی روش تأثیر میگذارد، یعنی نماهای کمتری شناسایی میشوند. از سوی دیگر، افزایش مقدار دایره ای تعداد مثبت کاذب را افزایش می دهد.
شکل 11. خطاها در تقسیم بندی نما به دلیل ترازهای درختی که به اشتباه به عنوان نشانگر نما استخراج شده اند. محل آزمایش در میدان سنت سولپیس در پاریس، فرانسه. Stereopolis II، IGN©. ( الف ) تصویر ارتفاع؛ ( ب ) نشانگرهای نما. چندین نشانگر نادرست به دلیل ترازبندی درختان شناسایی شده است. ( ج ) تقسیم بندی نما با استفاده از بازسازی کنترل شده با ویژگی.
این انگیزه ما برای پیشنهاد روش سوم است، قوی تر از دو روش پیشنهادی قبلی، و اجتناب از استفاده از نشانگرهای نما. ایده ما تجزیه و تحلیل کشیدگی و تکامل آن بر روی تجزیه ارتفاع صحنه سه بعدی است. اجازه دهید در قسمت زیر چنین روشی را معرفی کنیم.
5. بخش بندی نما بدون نشانگر
به منظور بخش بندی نماها بدون استفاده از نشانگرها، روشی را بر اساس تجزیه آستانه و پروفایل های ویژگی پیشنهاد می کنیم. در [ 38 ]، ما این روش را به منظور تقسیم بندی اجسام دراز بر روی تصاویر در مقیاس خاکستری معرفی کرده ایم. اجازه دهید تعریف آن را در حالت دو بعدی یادآوری کنیم:
تعریف 5. نمایه ویژگی دوبعدی. اجازه دهید من یک تصویر دیجیتال در مقیاس خاکستری باشم من: D → Vمن:�→�، با D ⊂ز2�⊂ز2دامنه تصویر و V= [ 0 , . . . , R ]�=[0،...،آر]مجموعه سطوح خاکستری تجزیه I را می توان با در نظر گرفتن آستانه های متوالی به دست آورد:
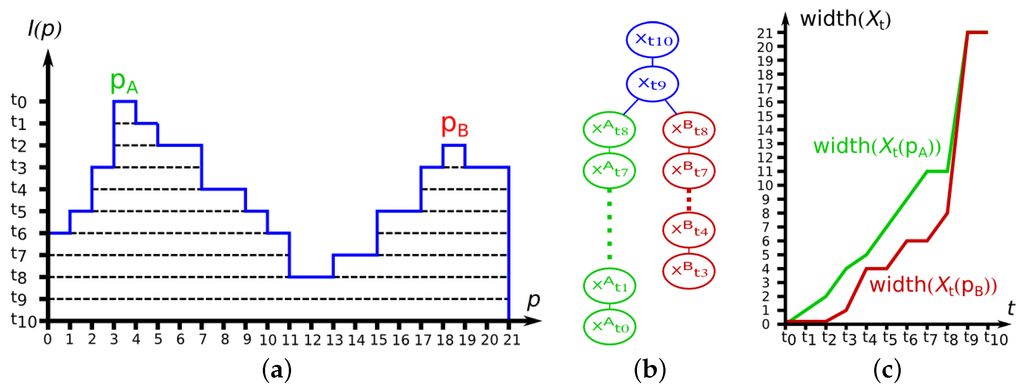
از آنجایی که این تجزیه ویژگی گنجاندن را برآورده می کند تیتی( من) ⊆تیt – 1( من) , ∀ t ∈ [ 1 , . . . , R – 1 ]تیتی(من)⊆تیتی–1(من)،∀تی∈[1،...،آر–1]، می توان درختی به نام درخت مولفه با مجموعه های سطح ساخت تیتی( من)تیتی(من). هر شاخه از درخت نشان دهنده تکامل یک جزء متصل منفرد است ایکستیایکستی. یک نمایه ویژگی، تکامل یک ویژگی (به عنوان مثال، مساحت، محیط، ازدیاد طول، سطح خاکستری متوسط، و غیره) یک CC معین در امتداد یک شاخه از درخت است.
شکل 12 تجزیه آستانه برای یک تابع 1 بعدی، درخت مؤلفه آن و نمایه های ویژگی (عرض) برای دو تابع حداکثر را نشان می دهد. پآپآو پبپب). رویدادهای روی این نمایه مشخصه برای تقسیم بندی اشیاء [ 39 ]، استخراج ویژگی ها [ 40 ، 41 ، 42 ] و تعریف عناصر ساختاری تطبیقی [ 19 ] مفید هستند .
شکل 12. ( الف ) تجزیه آستانه 1 بعدی. ( ب ) درخت جزء؛ ( ج ) مشخصات ویژگی.
حال اجازه دهید این تعریف را به حالت سه بعدی بسط دهیم:
تعریف 6. مشخصات ویژگی سه بعدی. فرض کنید P یک ابر نقطه سه بعدی حاوی لیستی از N نقطه باشد پمن=(ایکسمن،yمن،zمن) ⊂آر3پمن=(ایکسمن،�من،�من)⊂ℜ3، جایی که i = [ 0 , . . . ، ن]من=[0،...،ن]. اجازه دهید مترمن= (تومن،vمن) ⊂ز2مترمن=(تومن،�من)⊂ز2طرح ریزی نقطه پمنپمندر تصویر ارتفاع fm a x�مترآایکس. تجزیه P در برش های افقی را می توان با در نظر گرفتن آستانه های متوالی در محور Z که با ارتفاع معین از هم جدا شده اند به دست آورد. Δ zΔ�:
برخلاف حالت دو بعدی، این تجزیه هیچ ویژگی گنجاندنی را برآورده نمی کند. با این حال، همیشه می توان تکامل یک جزء متصل را تجزیه و تحلیل کرد ایکستیایکستیروی برش های افقی تیزتی( ص)تیتیز(پ). یک نمایه ویژگی سه بعدی، تکامل یک ویژگی (به عنوان مثال، تعداد نقاط، چگالی، ارتفاع متوسط، و غیره) یک CC معین در طول تجزیه است.
با تطبیق بیشتر با داده های شهری سه بعدی، اجازه دهید تجزیه تطبیقی را با استفاده از برش های موازی با زمین تعریف کنیم. از تعریف 6، تجزیه زیر را پیشنهاد می کنیم:
تعریف 7. voxelization تطبیقی با استفاده از اطلاعات زمین. اجازه دهید G یک تصویر دیجیتال در مقیاس خاکستری باشد جی : D → Vجی:�→�، با D ⊂ز2�⊂ز2دامنه تصویر و V= [ 0 , . . . , R ]�=[0،...،آر]مجموعهای از سطوح خاکستری که ارتفاع زمین را ترسیم میکنند، که در نتیجه یک فرآیند تقسیمبندی زمین مشخص میشود. تجزیه یک ابر نقطه سه بعدی P با استفاده از برش های موازی با زمین را می توان با در نظر گرفتن آستانه های متوالی از زمین که با ارتفاع معین جدا شده اند به دست آورد. Δ zΔ�:
∀ t = [ 0 ، . . ., R – 1 ] ;∀ i = [ 0 ، . . . ، ن]∀تی=[0،...،آر–1];∀من=[0،...،ن]
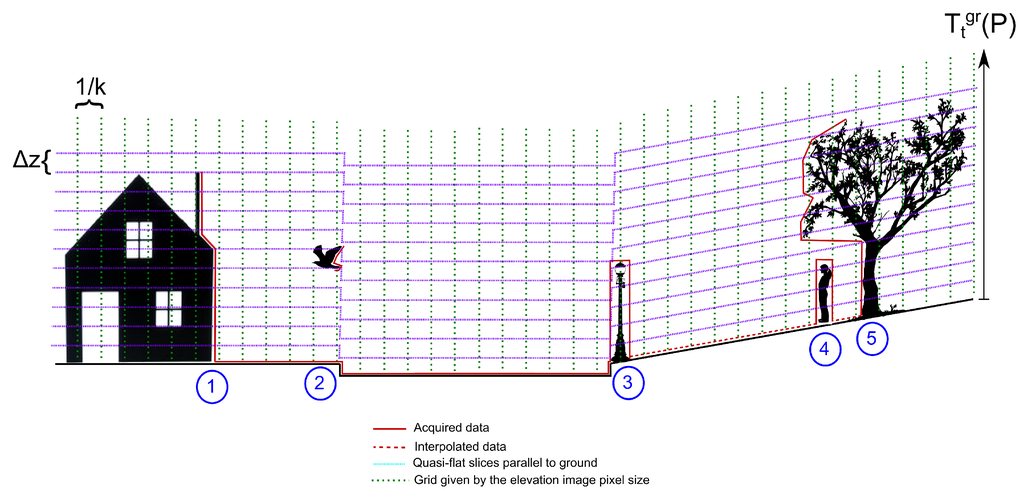
این تجزیه معادل یک voxelization تطبیقی است، همانطور که در شکل 13 نشان داده شده است . خطوط چین نشان دهنده برش هایی موازی با زمین هستند. برای هر قطعه، یک شبکه اشغال با توجه به اندازه پیکسل تصویر ارتفاعی تعریف می شود. 1 / k1/ک، که در آن k تعداد پیکسل ها در واحد طول است (برای جزئیات بیشتر، [ 43 ] را ببینید). اگر حداقل یک نقطه سه بعدی در داخل آن وجود داشته باشد، هر وکسل کامل نشان داده می شود، یا در غیر این صورت خالی است . در نهایت، این شبکه های اشغال در یک تصویر سه بعدی باینری روی هم قرار می گیرند. برای هر برش، ویژگی ها بر روی هر CC باینری محاسبه می شود.
شکل 13. وکسل سازی تطبیقی با استفاده از برش های موازی با زمین. این مثال شامل پنج شی است: ① نما، ② پرنده، ③ تیر چراغ، ④ عابر پیاده و ⑤ درخت.
ما پیشنهاد می کنیم نماها را با استفاده از تصویر حداکثر طول محاسبه شده از مشخصات ویژگی تجزیه تقسیم بندی کنیم. تیgrتیتیتی��. با این هدف، ازدیاد طول ژئودزیکی را محاسبه می کنیم E(ایکستی)�(ایکستی)برای هر CC در هر برش موازی با زمین. سپس برای هر پیکسل مترمنمترمن، ما حداکثر ازدیاد طول را در کل تجزیه ذخیره می کنیم:
چنین تصویر ویژگی پارتیشنی از فضایی است که هر پیکسل حاوی اطلاعاتی در مورد ازدیاد طول همسایگی خود است. سپس، در کارهای تقسیم بندی که برخی از دانش شکل قبلی در دسترس است مفید است. این تجزیه برای بخش بندی نماها در حالی که ساختارهای دیگر مانند اشیاء متصل به آن را فیلتر می کند، استفاده می شود. ارتفاع برش تنظیم شده است Δ z= Δ λΔ�=Δ�= 1.0 متر زیرا ما فقط به اشیاء متصل بالاتر از 1.0 متر (موتورسیکلت، عابران پیاده، مبلمان شهری و غیره ) علاقه مندیم . بهعلاوه، بین زمان پردازش و کارایی معاوضهای ارائه میکند زیرا برای تجزیه یک سناریوی شهری بدون آسمانخراش تنها چند ده برش لازم است.
شکل 14 نمونه ای از تقسیم بندی نما را با استفاده از این رویکرد نشان می دهد. شکل 14 الف تصویر ارتفاع را نشان می دهد. شکل 14 ب تصویر ازدیاد طول محاسبه شده از تجزیه آستانه ابر نقطه سه بعدی را نشان می دهد. شکل 14 c نتیجه تقسیم بندی را با اعمال یک آستانه ساده بر روی تصویر کشیدگی نشان می دهد. تعریف می کنیم Em i n�مترمن�به عنوان حداقل کشیدگی مجاز برای یک نما. در آزمایشهایمان، به صورت اکتشافی تنظیم کردهایم Em i n�مترمن�= 20، که مربوط به کشیدگی مستطیلی است که طول آن تقریباً 25 برابر بیشتر از عرض آن است. قابل توجه است که این آستانه ازدیاد طول محدودتر از آن چیزی است که برای استخراج نشانگر استفاده می شود ( بخش 4.1 ) زیرا در اینجا ما علاقه مند به تشخیص حداکثر مقدار طول کشیدگی در تمام تجزیه هستیم.
شکل 14. تقسیم بندی نما با استفاده از تصویر حداکثر طول (بدون نشانگر). محل آزمایش در خیابان کاست در پاریس، فرانسه. Stereopolis II، IGN©. ( الف ) تصویر ارتفاع؛ ( ب ) تصویر حداکثر طول محاسبه شده از ابر نقطه سه بعدی. ( ج ) تقسیم بندی نما با استفاده از تصویر حداکثر طول.
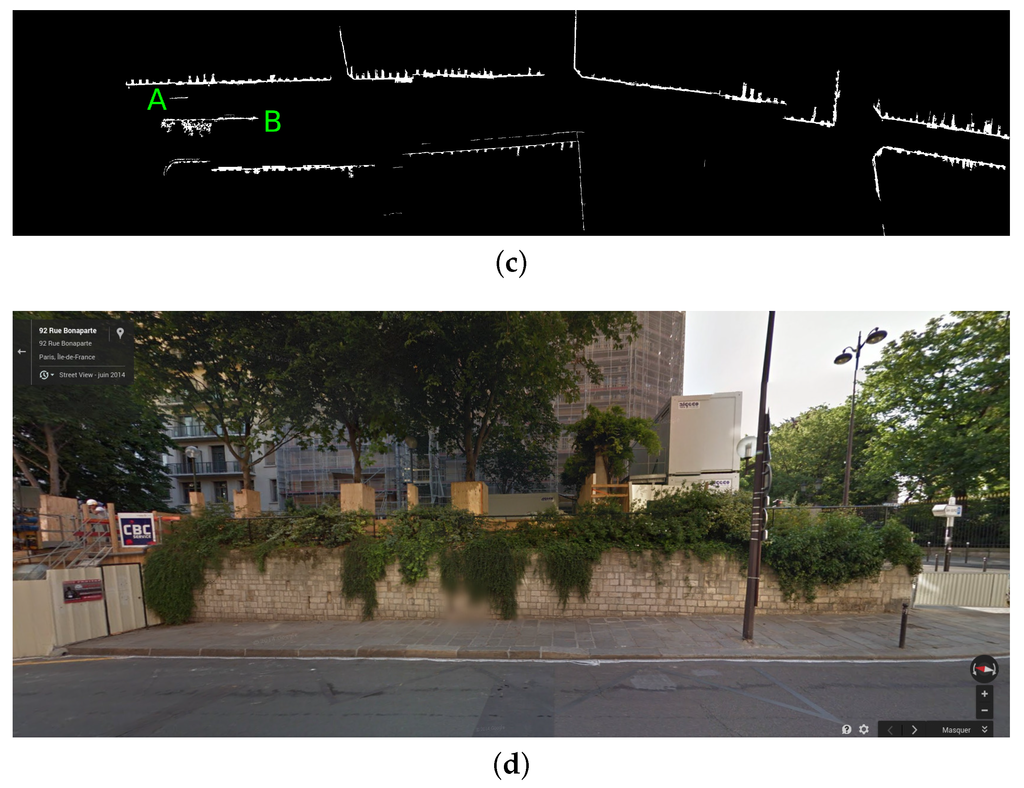
شکل 15 یک نتیجه تقسیم بندی نما را در یک سایت آزمایشی در خیابان بناپارت در پاریس، فرانسه نشان می دهد. با توجه به شکل 11 اکثر نماها به درستی تقسیم بندی شده اند. برخی از مشکلات در قسمت چپ ظاهر می شود: منطقه 1، جایی که قسمت کناری اتوبوس به اشتباه به عنوان نما تشخیص داده شده است. و منطقه B، که در آن بوته ها و پوشش گیاهی روی یک دیوار کم قابل جداسازی نیستند ( شکل 15 د). این اجسام دارای کشیدگی بالایی هستند، سپس به اشتباه به عنوان نما تقسیم شده اند.
شکل 15. تقسیم بندی نما با استفاده از تصویر حداکثر طول (بدون نشانگر). محل آزمایش در خیابان بناپارت در پاریس، فرانسه. Stereopolis II، IGN©. ( الف ) تصویر ارتفاع؛ ( ب ) تصویر حداکثر طول محاسبه شده از ابر نقطه سه بعدی. ( ج ) تقسیم بندی نما با استفاده از تصویر حداکثر طول. دو خطای تقسیم بندی در مناطق A و B یافت شده است. ( د ) خطای تقسیمبندی نما به دلیل پوشش گیاهی و بوتههای روی دیوار کم ارتفاع. این یک مورد غیر معمول است که در منطقه B در شکل 15 c ارائه شده است.
6. تقسیم بندی بلوک شهر
بلوک شهری کوچکترین منطقه ای است که توسط خیابان ها احاطه شده است. اندازه ها و شکل های بسیار متنوعی را می توان در محیط های شهری یافت. به طور کلی، به محدودیت های تاریخی، جمعیتی و جغرافیایی بستگی دارد. به عنوان مثال، بسیاری از شهرهای ماقبل صنعتی تمایل به بلوک های شهری نامنظم دارند، در حالی که شهرهای جدیدتر معمولاً ترتیبات بسیار منظم تری دارند [ 44 ].
در برنامه ما، بلوک های شهر به عنوان بزرگترین موجودات معنایی در محیط شهری در نظر گرفته می شوند. تقسیم بندی آنها برای تجزیه و تحلیل بلوک های شهری فردی مفید است. علاوه بر این، هر بلوک شهر را می توان به طور جداگانه پردازش کرد و نتایج آنها را در پایان تجزیه و تحلیل به هم متصل کرد، نیازهای حافظه را کاهش داد و امکان موازی سازی را فراهم کرد.
هنگامی که نماها با استفاده از یکی از سه روش پیشنهادی ما تقسیم بندی شدند، منطقه نفوذ (IZ) هر نما را برای تعریف بلوک های شهری محاسبه می کنیم. الگوریتم IZ یکی از اولین عملگرهای مورفولوژیکی بود که برای تقسیمبندی تصویر اعمال شد. در دهه 1970 با کاربرد تکراری عملگرهای اساسی مانند فرسایش و اتساع [ 45 ، 46 ] کشف شد. IZ یک CC معین با مجموعه پیکسل های یک تصویر باینری تعریف می شود که به این CC نزدیکتر از هر CC دیگر روی تصویر است. اجازه دهید تعریف رسمی آن را معرفی کنیم:
تعریف 8. مناطق نفوذ (IZ). اجازه دهید X یک تصویر باینری باشد و ک1ک1، ک2ک2،…، کnک�CC از X. منطقه نفوذ از کمنکمنمجموعه ای از پیکسل های تصویر X است که به آن نزدیک تر است کمنکمننسبت به هر CC دیگر تصویر X:
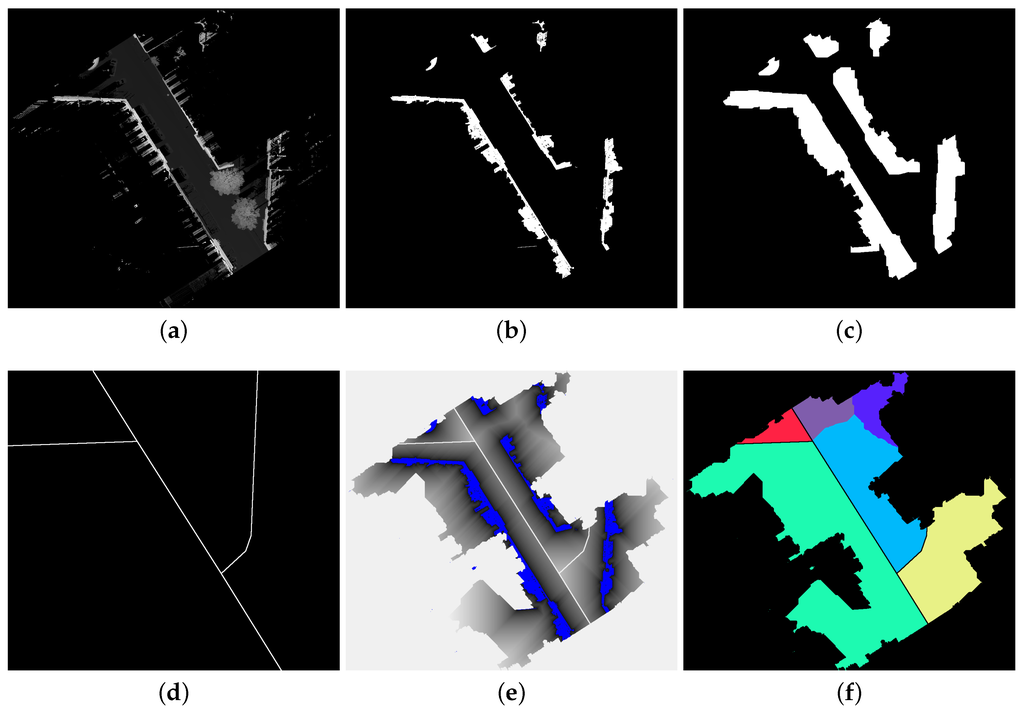
قابل توجه است که این یک تعریف جایگزین از نمودارهای ورونوی است [ 47 ]. در عمل، IZ یک تصویر باینری با استفاده از یک حوضه آبخیز محدود در تابع فاصله تصویر باینری محاسبه میشود. شکل 16 این تقسیم بندی بلوک شهری را نشان می دهد. شکل 16 الف تصویر ارتفاع را نشان می دهد. شکل 16 ب تصویر باینری حاوی نتیجه تقسیم بندی نما را نشان می دهد. شکل 16 c یک بسته شدن مورفولوژیکی اندازه را نشان می دهد اسm i nاسمترمن�به منظور اتصال مجدد در نزدیکی نماهای متعلق به همان بلوک شهری، به عنوان مثال ، اسm i nاسمترمن�مخفف حداقل جدایی بین بلوک های شهر است. شکل 16 d محورهای جاده میانی را نشان می دهد که برای جلوگیری از تعریف بلوک شهری در عبور از خیابان مفید است. این اطلاعات در صورت وجود استفاده می شود و می توان آن را از مسیر وسیله نقلیه یا از یک نقشه 2 بعدی خارجی به دست آورد. شکل 16 e تابع فاصله محاسبه شده از نماها را نشان می دهد. تابع فاصله هم در محورهای جاده میانی و هم در پیکسل های خالی به حداکثر بودن محدود می شود. در نهایت، شکل 16 f IZ را به عنوان نتیجه یک حوضه محدود در تابع فاصله نشان می دهد. هر رنگ نمایانگر یک بلوک شهری متفاوت است.
شکل 16. تقسیم بندی بلوک های شهر با استفاده از مناطق نفوذ نما. محل آزمایش در خیابان آساس در پاریس، فرانسه. Stereopolis II، IGN©. ( الف ) تصویر ارتفاع؛ ( ب ) تصویر باینری حاوی نتیجه تقسیم بندی نما. ( ج ) بسته شدن اندازه اسm i nاسمترمن�برای اتصال مجدد در نزدیکی نماها؛ ( د ) محورهای جاده میانی (در صورت وجود استفاده می شود). ( ه ) تابع فاصله از نماها (آبی). هم پیکسل های خالی و هم محورهای جاده میانی برای داشتن حداکثر فاصله محدود شده اند. ( و ) مناطق نفوذ. هر رنگ نمایانگر یک بلوک شهری متفاوت است.
شکل 17 و شکل 18 دو نتیجه تقسیمبندی بلوک شهری را نشان میدهند که روی ابر نقطه سهبعدی بازپخش شدهاند. در آن آزمایشها، نماها با استفاده از روش مبتنی بر ازدیاد طول که در بخش 5 توضیح داده شد، تقسیمبندی شدهاند .
شکل 17. تقسیم بندی بلوک های شهر با استفاده از مناطق نفوذ نما. بازپخش روی ابر نقطه سه بعدی. محل آزمایش در خیابان آساس در پاریس، فرانسه. Stereopolis II، IGN©. ( الف ) ابر نقطه ای که با مختصات Z رنگ می شود. ( ب ) ابر نقطه ای رنگ شده با شدت لیزر. ( ج ) تقسیم بندی نما با استفاده از تصویر کشیدگی (روش بدون نشانگر). نما (آبی) و دیگر (خاکستری)؛ ( د ) تقسیم بندی بلوک های شهر. هر رنگ نمایانگر یک بلوک شهری متفاوت است.
شکل 18. تقسیم بندی بلوک های شهر با استفاده از مناطق تأثیرگذار نماها. بازپخش روی ابر نقطه سه بعدی. محل آزمایش در خیابان بناپارت و میدان سنت سولپیس در پاریس، فرانسه. Stereopolis II، IGN©. ( الف ) تقسیم بندی نما با استفاده از تصویر کشیدگی (روش بدون نشانگر). نما (آبی) و دیگر (خاکستری)؛ ( ب ) تقسیم بندی بلوک های شهر. هر رنگ نمایانگر یک بلوک شهری متفاوت است.
7. نتایج
روشهای تقسیمبندی نمای ما بر روی مجموعه دادههای TerraMobilita آزمایش شدهاند تا نتایج کمی و کیفی به دست آید [ 4 ]. دو نوع حاشیه نویسی حقیقت زمینی (GT) موجود است:
-
خطوط 2 بعدی که نشان دهنده جدایی بین پیاده روها و ساختمان ها است. این حاشیه نویسی های دستی دو بعدی معمولاً توسط مقامات محلی ارائه می شود. در مورد ما، آنها از Open Data Paris [ 48 ]، پروژه ای از تالار شهر پاریس ( Mairie de Paris ، به زبان فرانسوی) به دست آمده اند تا داده های شهری را در دسترس جامعه قرار دهند. ارزیابی با استفاده از خطوط دوبعدی معمولاً در حالت پیشرفته زمانی که حاشیه نویسی سه بعدی در دسترس نیست استفاده می شود [ 3 , 49 , 50]. این ارزیابی ها ایده ای در مورد عملکرد روش تقسیم بندی می دهد. با این حال، نتایج باید به دقت تفسیر شوند زیرا ارزیابی فقط در فضای دو بعدی در سطح زمین انجام می شود، ویژگی های سه بعدی تقسیم بندی عملکرد مانند نماهای کج شده، جزئیات معماری و بالکن ها را نمی توان به طور مستقیم ارزیابی کرد، همانطور که در شکل 19 نشان داده شده است .
-
حاشیه نویسی های سه بعدی نقطه ای، به عنوان مثال ، یک کلاس به هر نقطه سه بعدی اختصاص داده می شود. این حاشیهنویسیهای نقطهای امکان یک ارزیابی کلی را با در نظر گرفتن تمام نکات نما فراهم میکند. به نظر ما، این ارزیابی مناسب ترین است، با این حال حاشیه نویسی های دستی سه بعدی کامل به ندرت در حالت پیشرفته موجود است. در آزمایشهای خود، از حاشیهنویسیهای سه بعدی و روشهای ارزیابی توسعهیافته در چارچوب معیار TerraMobilita/iQmulus [ 51 ] استفاده کردهایم.
ارزیابیها بر اساس هر نوع حاشیهنویسی GT در دو بخش زیر ارائه شدهاند.
7.1. نتایج: ارزیابی با استفاده از داده های باز پاریس
ما 4 مجموعه داده MLS را از ناحیه 6 پاریس در فرانسه انتخاب کرده ایم. داده ها توسط Stereopolis II [ 52 ]، یک سیستم MLS توسط آژانس ملی نقشه برداری فرانسه (IGN-In French Institut National de l’Information Géographique et Forestière ) به دست آمده است . جدول 1 مجموعه داده های مورد استفاده در این ارزیابی را شرح می دهد.
جدول 1. مجموعه داده های مورد استفاده برای ارزیابی روش های تقسیم بندی نمای ما. تمام مجموعه داده ها در ژانویه 2013 توسط سیستم Stereopolis II در منطقه 6 پاریس، فرانسه به دست آمده است.
حاشیه نویسی GT از Open Data Paris به دست آمده است و مطابق با خطوط دو بعدی است که محل اتصال پیاده روها و ساختمان ها را در سطح زمین نشان می دهد. تجزیه و تحلیل کمی با مقایسه بین خطوط خودکار و GT روی یک تصویر دو بعدی انجام می شود. هنگامی که نقاط نمای سه بعدی به یک صفحه دوبعدی نمایش داده می شوند، معمولاً به دلیل تمایل نما، جزئیات معماری و بالکن ها از یک خط منفرد عریض تر هستند. بنابراین، بافرهای اطراف خطوط GT و نماهای قطعهبندی شده برای ارزیابی نتایج مورد نیاز است.
از یک طرف، یک نمای قطعه قطعه شده اگر به ترتیب در داخل یا خارج بافر GT قرار داشته باشد، به عنوان مثبت واقعی یا مثبت کاذب برچسب گذاری می شود. از طرف دیگر، اگر نمای GT به ترتیب در داخل یا خارج از بافر نمای قطعهبندی شده قرار داشته باشد، بهعنوان قطعهبندی شده یا گمشده برچسبگذاری میشود.
در مجموعه دادههای خود، عرض بافر 1.0 متر را در نظر میگیریم که مطابق با عرض یک بالکن معمولی هاوسمانی در پاریس است. همانطور که در شکل 19 نشان داده شده است، این بافر برای تعیین کمیت مثبت های واقعی بدون برآورد بیش از حد مثبت های کاذب مناسب است . این ارزیابی مبتنی بر بافر معمولاً در سایر آثار گزارش شده در ادبیات استفاده می شود [ 3 ، 49 ، 50 ].
شکل 19. خطوط حقیقت زمین و نقاط نمای سه بعدی که بر روی صفحه دوبعدی پیش بینی شده اند. خطوط GT (قرمز) و نماهای تقسیم شده (آبی). محل آزمایش در خیابان آساس در پاریس، فرانسه. Stereopolis II، IGN©.
کلاسیک Precision (P)، Recall (R) و fمنظور داشتن�منظور داشتنمعیارها محاسبه می شوند. یادآوری به عنوان تعداد پیکسل های GT که به درستی تقسیم شده اند تقسیم بر تعداد کل پیکسل های GT تعریف می شود. دقت به عنوان تعداد پیکسل های مثبت واقعی تقسیم بر تعداد کل پیکسل های تقسیم شده (مثبت واقعی + مثبت کاذب) تعریف می شود. و افm e a n= 2 PR / ( P+ R )افمترهآ�=2پآر/(پ+آر).
جدول 2 مقایسه کمی بین روش های تقسیم بندی نما را ارائه می دهد. همانطور که ذکر شد، این نتایج باید به دقت تفسیر شوند زیرا ارزیابی فقط در فضای دو بعدی در سطح زمین انجام می شود. سپس، تقسیم بندی عملکرد نماهای شیبدار، نماهایی با جزئیات معماری و بالکن ها را نمی توان مستقیماً کمیت کرد.
شکل 20 ، شکل 21 ، شکل 22 و شکل 23 تصاویر ارتفاعی، حاشیه نویسی GT و نتایج تقسیم بندی را در چهار سایت آزمایشی ما نشان می دهد. قابل توجه است که چندین حاشیه نویسی از حقیقت وجود ندارد. به عنوان مثال، در سایت III ( شکل 22 ب) چندین نما در سمت چپ خیابان وجود ندارد، در حالی که در سایت IV ( شکل 23 ب) نماهای پشت درختان در سمت راست خیابان حاشیه نویسی نشده است. بنابراین، چندین تقسیم بندی صحیح به اشتباه به عنوان مثبت کاذب برچسب گذاری شده اند. در نتیجه، عملکرد روشهای ما در این دو سایت آزمایشی کمتر برآورد شده است. اجازه دهید نتایج هر روش را با جزئیات تجزیه و تحلیل کنیم.
روش 1، بر اساس بازسازی با اتساع از نشانگرها، بالاترین یادآوری را برای بازیابی 100٪ نماها در چهار سایت آزمایش ارائه می دهد. با این حال، این روش همچنین بیشترین تعداد موارد مثبت کاذب را ارائه می دهد (دقت بین 13.6٪ و 45.1٪ برای همه مکان های آزمایش است). همانطور که قبلا ذکر شد، این روش مبتنی بر اتساع ژئودزیکی تکراری است، سپس هر جسمی که نما را لمس کند به عنوان بخشی از آن تقسیم میشود. این روش سریعترین روش است و استفاده از آن ممکن است در برنامههایی با محدودیتهای زمانی دقیق و یا اگر تنها به یک تقسیمبندی تقریبی نیاز باشد، توجیه شود. به عنوان مثال، اگر ما فقط به تعیین مرز فضای عمومی علاقه مند هستیم (به عنوان مثال، برای یک برنامه تحرک شهری)، تمام اشیاء لمس یا پشت نما نیازی به تقسیم بندی ندارند.
جدول 2. مقایسه کمی بین روش های تقسیم بندی نمای ما در 4 سایت آزمایشی.
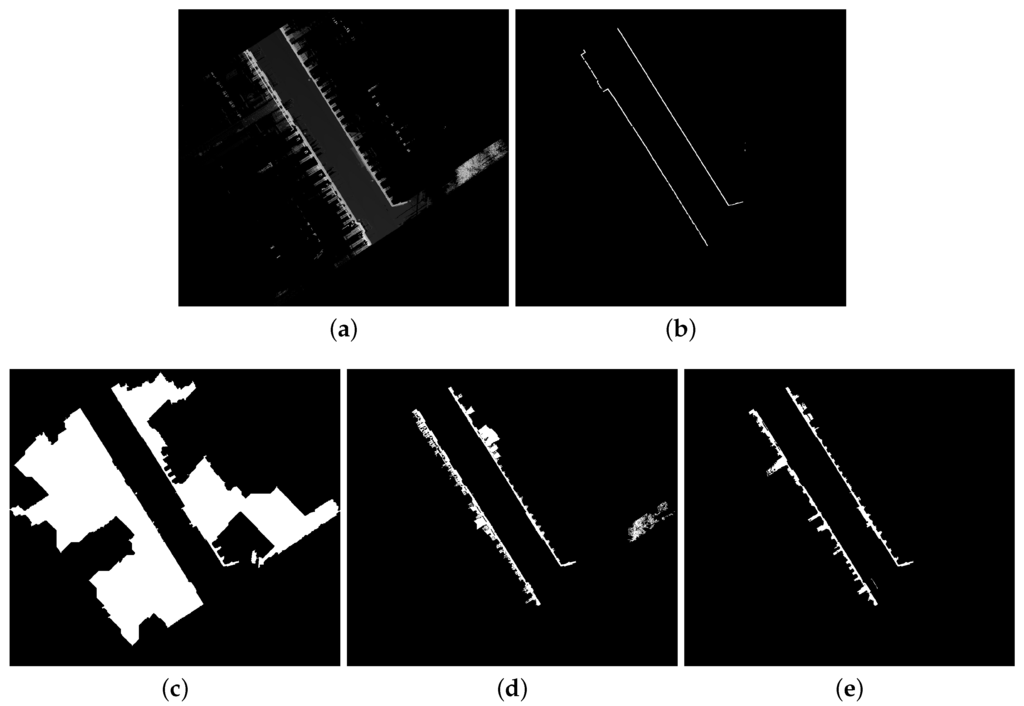
شکل 20. نتایج تقسیم بندی نما برای سایت I (TerMob2_LAMB93_0020.ply). ( الف ) تصویر ارتفاع؛ ب ) حقیقت پایه. خطوط نما گرفته شده از ODParis. ( ج ) تقسیم بندی نما با استفاده از بازسازی با اتساع. ( د ) تقسیم بندی نما با استفاده از بازسازی کنترل شده با ویژگی. ( ه ) تقسیمبندی نما با استفاده از تصویر حداکثر طول.
شکل 21. نتایج تقسیم بندی نما برای سایت II (TerMob2_LAMB93_0021.ply). ( الف ) تصویر ارتفاع؛ ب ) حقیقت پایه. خطوط نما گرفته شده از ODParis. ( ج ) تقسیم بندی نما با استفاده از بازسازی با اتساع. ( د ) تقسیم بندی نما با استفاده از بازسازی کنترل شده با ویژگی. ( ه ) تقسیمبندی نما با استفاده از تصویر حداکثر طول.
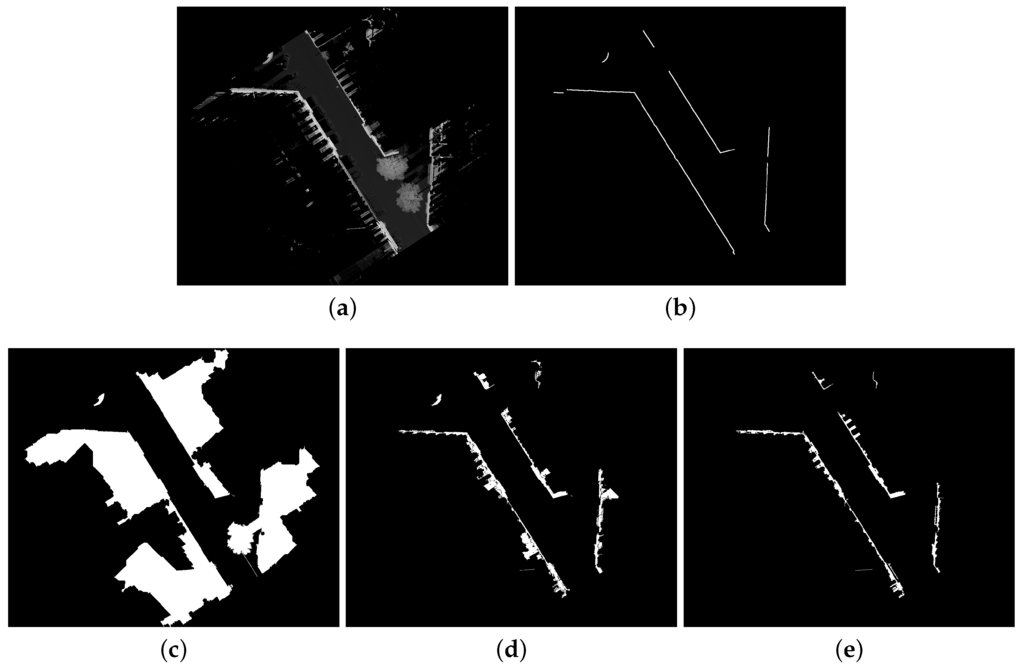
شکل 22. نتایج تقسیم بندی نما برای سایت III (Cassette_idclass.ply). ( الف ) تصویر ارتفاع؛ ب ) حقیقت پایه. خطوط نما گرفته شده از ODParis. ( ج ) تقسیم بندی نما با استفاده از بازسازی با اتساع. ( د ) تقسیم بندی نما با استفاده از بازسازی کنترل شده با ویژگی. ( ه ) تقسیمبندی نما با استفاده از تصویر حداکثر طول.
همانطور که قبلا توضیح داده شد، مشکل اصلی این روش این است که اشیاء متصل مانند موتورسیکلت های پارک شده در کنار نما یا عابران پیاده که تکیه داده اند، در ماسک نما بازسازی می شوند. به منظور حل این مشکل، ما روش 2 را بر اساس بازسازی کنترل شده ویژگی از نشانگرها پیشنهاد کردهایم. از آنجایی که اجسام متصل معمولاً ازدیاد طول نمای کلی را کاهش میدهند، این روش نتایج بهتری نسبت به روش اول ارائه میدهد: فراخوانی برای همه مکانهای آزمایشی بالاتر از 97 درصد است در حالی که دقت در سایتهای I و II به ترتیب تا 73.2 درصد و 87.8 درصد افزایش مییابد. که تمام نماها حاشیه نویسی شده است. این روش بهترین مبادله بین عملکرد و زمان پردازش را ارائه می دهد.
شکل 23. نتایج تقسیم بندی نما برای سایت IV (Z2.ply). ( الف ) تصویر ارتفاع؛ ب ) حقیقت پایه. خطوط نما گرفته شده از ODParis. ( ج ) تقسیم بندی نما با استفاده از بازسازی با اتساع. ( د ) تقسیم بندی نما با استفاده از بازسازی کنترل شده با ویژگی. ( ه ) تقسیمبندی نما با استفاده از تصویر حداکثر طول.
به طور کلی، روش های مبتنی بر نشانگرهای نما به شدت تحت تأثیر استخراج نشانگرها هستند. اشکال اصلی این است که نشانگرهای نامناسب ممکن است در بازسازی اشیاء غیر نما خطا ایجاد کنند. به ویژه در سایت IV، روشهای مبتنی بر نشانگر در تقسیمبندی ردیفهای درخت شکست میخورند (دقت برای روشهای 1 و 2 به ترتیب 13.6 و 13.9 درصد است). روش 3 نیازی به نشانگر ندارد و منجر به تقسیم بندی قوی تر بر اساس تصویر حداکثر طول می شود. این روش بهترین نتایج را برای همه سایت های آزمایشی ایجاد می کند: fمنظور داشتن�منظور داشتنمعادل 80.9% و 92.8% برای سایت های I و II. با وجود از دست دادن حاشیه نویسی GT، fمنظور داشتن�منظور داشتنبرابر با 80.3% و 74.9% برای سایت های III و IV است که عملکرد این روش را حتی در حضور درختان ثابت می کند. اشکال اصلی این است که اجرای آن کندتر است، پس برای برنامه های بلادرنگ مناسب نیست. با این حال، محاسبات زمان برای برنامه های کاربردی در مقیاس بزرگ منطقی است، جایی که محدودیت های زمانی کمتر سختگیرانه هستند. توجه داشته باشید که زمان پردازش تنها چند ده ثانیه برای دستیابی به چند صد متر با استفاده از یک پیاده سازی بهینه نشده است.
7.2. نتایج: پایگاه داده TerraMobilita/iQmulus
پایگاه داده TerraMobilita/iQmulus [ 51 ] با هدف محک زدن روش های تحلیل معنایی کار بر روی داده های شهری متراکم سه بعدی ایجاد شده است. این پایگاه داده در چارچوب پروژه TerraMobilita ایجاد شده است. این شامل 11 ابر نقطه سه بعدی مشروح شده است که توسط سیستم Stereopolis II در منطقه 6 پاریس در ژانویه 2013 به دست آمده است. حاشیه نویسی به روشی دستی توسط آزمایشگاه MATIS در IGN انجام شده است.
ارزیابی ما از یکی از آن ابرهای نقطه تشکیل شده است. برای این آزمایش از فایل “Cassette_idclass.ply” استفاده شده است. ابر نقطه سه بعدی مشروح دستی در [ 51 ] و ابر نقطه سه بعدی پردازش شده با روش ما در [ 53 ] موجود است. این شامل 12 میلیون نقطه از یک بخش خیابانی به طول تقریبی 200 متر در خیابان کاست در پاریس، فرانسه است. حاشیه نویسی های دستی و ارزیابی های نقطه ای به طور مستقل توسط IGN انجام شده است. نتایج این معیار قبلاً در [ 54 ] منتشر شده است.
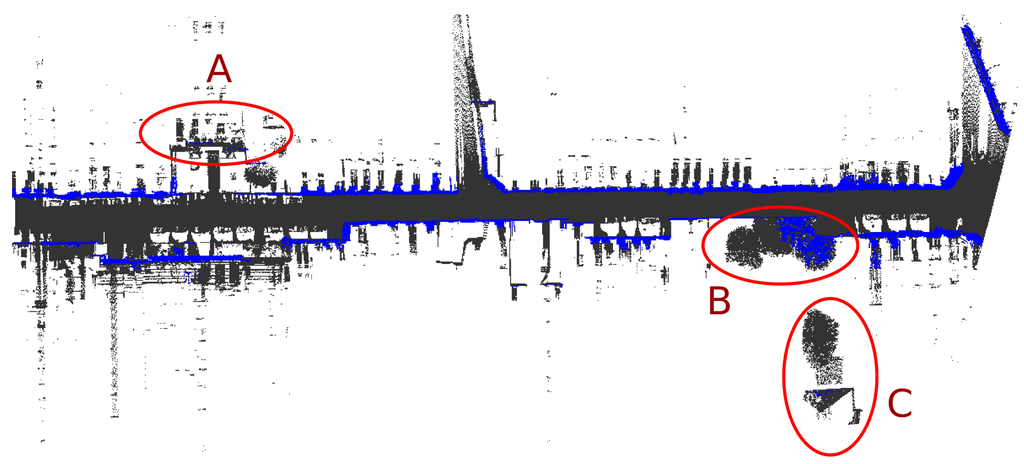
شکل 24 نتیجه تقسیم بندی نما را که روی ابر نقطه سه بعدی پیش بینی شده است نشان می دهد. در این آزمایش فقط از روش ما بر اساس تصویر ماکزیمم ازدیاد طول استفاده شده است. به عنوان یک نکته کلی، خطاهای روش تقسیم بندی ما به دلیل نمای ناقص شناسایی شده (منطقه A) و تراز درختی متصل به یک دیوار کم (منطقه B) است.
شکل 24. نتیجه تقسیم بندی نما با استفاده از تصویر حداکثر طول در فایل “Cassette_idclass.ply”. زمین (خاکستری)، نماها (آبی). فایل ورودی از پایگاه داده TerraMobilita/iQmulus گرفته شده است. Stereopolis II، IGN©. خطاها به دلیل نمای ناقص تشخیص داده شده ( منطقه A )، تراز درختی متصل به دیوار کم ( منطقه B ) و برخی از نقاط غیر مشروح ( منطقه C ) هستند.
همانطور که قبلا ذکر شد، نتایج ما نقطه به نقطه با استفاده از پروتکل ارزیابی TerraMobilita/iQmulus [ 51 ] ارزیابی میشوند. ابتدا ابر نقطه سه بعدی را در دو دسته اصلی طبقه بندی می کنیم: سطح (شامل نما و زمین) و سایر موارد . علاوه بر این، دسته بندی طبقه بندی نشده برای نقاط غیر مشروح در GT تعریف شده است، که نکات مبهم به سختی قابل حاشیه نویسی هستند. آنها با 18.31٪ از تعداد کل نقاط در مجموعه داده مطابقت دارند. به عنوان مثال، درخت و دیوار را در منطقه C در شکل 24 در نظر بگیرید . این نکات به صورت دستی به عنوان طبقه بندی نشده علامت گذاری شده اند ، سپس در ارزیابی لحاظ نشده اند.
جدول 3 ماتریس سردرگمی و نتایج طبقه بندی ما را برای این دو دسته ارائه می دهد. نتایج به صورت درصد با توجه به تعداد کل نقاط در ابر نقطه سه بعدی (12 میلیون امتیاز) ارائه شده است. قطعه بندی با استفاده از روش بدون نشانگر انجام شده است ( بخش 5 ). این طبقهبندی برای ارزیابی توانایی روش ما در تقسیمبندی سطوح (نما و زمین) در حین جداسازی سایر اشیاء متصل به آنها مفید است.
جدول 3. نتایج طبقه بندی در پایگاه داده TerraMobilita/iQmulus. GT: حقیقت زمین، AR: نتیجه خودکار. تقسیم بندی با استفاده از روش بدون نشانگر ( بخش 5 ).
با استفاده از روش ما، fمنظور داشتن�منظور داشتنبرای کلاس سطح برابر با 96.03٪ است در حالی که بقیه به درستی از آنها جدا شده اند fمنظور داشتن�منظور داشتنمعادل 71.08 درصد. در این آزمایش، ما عمدتاً علاقه مند به جداسازی نما و زمین از سایر سازه ها مانند اشیاء متصل هستیم. توجه داشته باشید که کلاس سطح شامل نماها و زمین است که با 75.81٪ از کل نقاط سه بعدی، بزرگترین دسته ها را در صحنه نشان می دهد، در حالی که کلاس دیگر 5.88 ٪ از کل نقاط سه بعدی را نشان می دهد. دقت کلی روش ما با در نظر گرفتن این دسته ها 92.73٪ است.
جدول 4 نتایج تقسیم بندی ما را برای کلاس سطح (نما و زمین) نشان می دهد. در ماتریس سردرگمی، نتایج به صورت درصد با توجه به تعداد کل نقاط در ابر نقطه سه بعدی (12 میلیون امتیاز) ارائه می شود. توجه داشته باشید که روش ما به درستی نما و زمین دادن را جدا می کند افm e a nافمترهآ�معادل 97.25 درصد و 98.72 درصد. شکل 25 نشان می دهد که خطاهای کوچک ناشی از اتصال نما به زمین است، جایی که ممکن است برخی از نقاط به اشتباه اختصاص داده شوند. دقت کلی در این مورد 98.26٪ است. این نتایج کارایی روش ما را ثابت می کند.
جدول 4. نتایج طبقه بندی برای کلاس سطح (نما و زمین) در پایگاه داده TerraMobilita/iQmulus. GT: حقیقت زمین، AR: نتیجه خودکار.
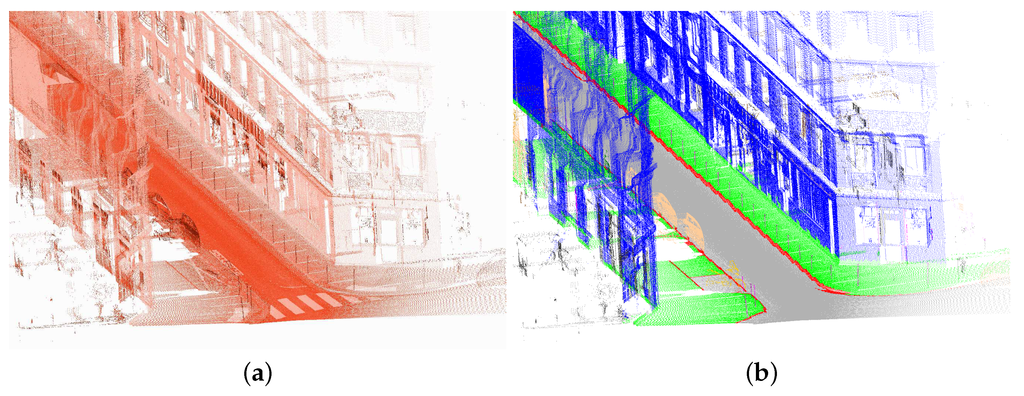
شکل 25. خطاهای جزئی در اتصال نما به زمین (بین رنگ های آبی و سبز). خرید توسط IGN © فرانسه. ( الف ) ابر نقطه ای که با شدت لیزر رنگ شده است. ( ب ) نتیجه تقسیم بندی بر روی ابر نقطه سه بعدی پیش بینی شده است. نما (آبی)، پیاده رو (سبز)، جاده (خاکستری)، حاشیه (قرمز)، اشیاء قطب مانند (ارغوانی)، سایر (صورتی).
8. نتیجه گیری
در این مقاله، ما رویکردهای خودکار و قوی برای تقسیم نماها از ابرهای نقطه سه بعدی پیشنهاد کردهایم. پردازش با استفاده از تصاویر ارتفاعی و تجزیه سه بعدی انجام می شود و نتیجه نهایی را می توان برای اهداف تجسم یا ارزیابی روی ابر نقطه سه بعدی بازتاب داد.
روش های ما بر اساس محدودیت های هندسی و ژئودزیکی است. پارامترها با محدودیت های شهری و معماری مرتبط هستند. بنابراین، آنها بصری برای تنظیم هستند. عملکرد روشهای ما در آزمایشهای ما بر روی پایگاههای داده TerraMobilita با استفاده از حاشیهنویسیهای دوبعدی و سهبعدی به اثبات رسیده است. سه رویکرد پیشنهاد شده است: (من) بازسازی با اتساع نشانگرها. (II) بازسازی کنترل شده ویژگی از نشانگرها و. (iii) تصویر حداکثر طول از تجزیه سه بعدی (بدون نشانگر). روش مبتنی بر بازسازی با اتساع از نشانگرها سریعترین روش است زیرا بر اساس آستانه های ساده است و از بازسازی های محدود شده توسط بقایای زمین برای بدست آوردن کل نما استفاده می کند. مشکل اصلی این است که اشیاء متصل به نما نیز بازسازی می شوند. برای حل این مشکل، ما یک بازسازی کنترل شده با استفاده از ازدیاد طول ژئودزیکی را پیشنهاد کردهایم. از آنجایی که اجسام متصل معمولاً در ارتفاعات کم ظاهر می شوند و کشش کلی نما را کاهش می دهند، این روش نتایج بهتری نسبت به روش اول ارائه می دهد. در آزمایشهای خود، از محدودیتهای هندسی و ژئودزیکی برای استخراج نشانگرهای نما استفاده کردهایم. در مورد نماهای کم یا زمانی که حسگر لیزری به سمت زمین است، نشانگرهای اضافی پیشنهاد شده است.
به طور کلی، روش های مبتنی بر نشانگرهای نما به شدت تحت تأثیر روش استخراج نشانگر هستند. اشکال اصلی این است که نشانگرهای نامناسب خطا ایجاد می کنند زیرا ممکن است اشیاء غیر نما را بازسازی کنند. به همین دلیل، ما یک روش قوی تر را برای اجتناب از استفاده از نشانگرهای نما پیشنهاد کرده ایم. در چنین روشی، هم ازدیاد طول و هم تکامل آن در طول تجزیه ارتفاع صحنه تحلیل میشود. این روش بر اساس تصویر حداکثر طول محاسبه شده از تجزیه سه بعدی است. ثابت شده است که بهترین نتایج را ایجاد می کند.
از آنجایی که سه روش پیشنهادی مبتنی بر محدودیتهای هندسی و ژئودزیکی هستند، میتوان آنها را برای مدیریت نماها با هر طول، ارتفاع و ازدیدی تنظیم کرد. با این حال، این روش ها نتایج و سطح جزئیات متفاوتی را ارائه می دهند. از این نظر، انتخاب بهترین روش تقسیمبندی باید بین کیفیت نتایج و هزینه محاسباتی باشد. این انتخاب همچنان وابسته به کاربرد است: از یک طرف، برای برنامههایی با محدودیتهای زمانی سخت که در آن فقط نتایج خشن مورد نیاز است، کاربر باید اولین روش مبتنی بر نشانگرهای نما و بازسازی مورفولوژیکی با اتساع را ترجیح دهد. با این حال، در حضور اشیایی که نماها را لمس می کنند، مانند بوته های کم ارتفاع یا موتورسیکلت های پارک شده، کاربر باید روش دوم مبتنی بر بازسازی کنترل شده با ویژگی ها را ترجیح دهد. از سوی دیگر، برای برنامه های نقشه برداری، که کیفیت نتایج در عین حفظ زمان محاسبات معقول برای رسیدگی به برنامه های کاربردی در مقیاس بزرگ از اهمیت بالایی برخوردار است، روش سوم مبتنی بر تصویر کشیدگی باید ترجیح داده شود. این روش دقیق ترین و مناسب ترین روش برای مدیریت اجسام مرتفع مانند درختان متصل به نما می باشد.
رویکرد ما یک نمونه اولیه تحقیقاتی است که عمدتا بر اساس کتابخانه Morph-M [ 55 ]، کتابخانه پردازش تصویر آزمایشگاه ما است. این کتابخانه امکان نمونه سازی سریع را فراهم می کند اما در نظر گرفته نشده است که یک کتابخانه سریع باشد. بهینه سازی اپراتورهای پایه ما (فرسایش، اتساع، باز کردن، بازسازی، حوضه آبخیز، و غیره)، که در حال حاضر در حال توسعه در CMM است، با هدف ارائه اپراتورهای بهینه برای زمان واقعی و/یا توسعه تصویر بزرگ است. نرمافزار (صفهای سلسله مراتبی، تجزیه عناصر ساختاری، از جمله) و سختافزار (SIMD-Single Instruction Multiple Data و موازیسازی) در کتابخانه SMIL [ 56 ] موجود هستند و در توسعههای آینده ما یکپارچه خواهند شد.










بدون نظر