1. معرفی
حرکت عابر پیاده در بافت مناطق شهری تنیده شده است. از فضاهای داخلی خصوصی گرفته تا فضاهای عمومی بیرونی، عابران پیاده به طور مداوم از محیط اطراف خود برای رسیدن به مقاصد، کاوش در محیط خود و دستیابی به اهداف خاص استفاده می کنند. با این حال، علیرغم فراگیر شدن حرکت عابر پیاده، درک چگونگی حرکت عابران پیاده و کشف فضای اطراف آنها یک چالش علمی اساسی است. این چالش پیامدهای عملی قابل توجهی دارد، از بهبود طراحی و عملکرد فضاهای شهری تا واکنش اضطراری و بازیابی بلایا. تشدید روند شهرنشینی منجر به افزایش جمعیت شهری می شود که طبق برخی پیش بینی ها تا سال 2050 به 6.3 میلیارد نفر خواهد رسید [ 1 ]] یا تقریباً دو سوم جمعیت جهان در آن زمان. این روند بر نیاز به کسب بینش بهتر در مورد نحوه حرکت عابران پیاده و استفاده از فضاهای شهری تأکید می کند.
مدلهای عابر پیاده الگوهای حرکت افراد یا گروهها را در یک صحنه در طول زمان و مکان توصیف میکنند که به موجب آن موقعیت فعلی یک فرد بر اساس موقعیت قدیمی، مقصد مورد نظر و محیط اطراف، از جمله محیط فیزیکی و افراد دیگر است [ 2 ]. چنین مدل هایی به طور گسترده برای شبیه سازی فعالیت های جمعیت برای برنامه ریزی و ارزیابی از دیدگاه یک فرد مورد استفاده قرار می گیرند (نگاه کنید به [ 3 ]] برای بررسی). با مدلسازی فرد و بررسی نحوه تعامل افراد در مکان و زمان، محققان میتوانند ظهور جمعیت را از پایین به بالا مشاهده کنند. یکی از تکنیکهایی که ذاتاً برای مدلسازی افراد یا گروههای افراد مناسب است، مدلسازی مبتنی بر عامل است. مدلهای مبتنی بر عامل (ABMs) برای بررسی طیف گستردهای از پدیدهها از دیدگاه فردی استفاده شدهاند، از جمله: حرکت حیوانات [ 4 ]. شیوه های کشاورزی [ 5 ]؛ تغییر کاربری زمین [ 6 ]; تفکیک مسکونی [ 7 ]؛ جنایت [ 8 ]; به الگوهای سفر روزانه [ 9]. با توجه به حرکت عابر پیاده، ABMها برای بررسی تعدادی از مشکلات مانند ناوبری در فضاهای محدود، مانند گالریهای هنری (به عنوان مثال، [ 10 ]) استفاده شدهاند. ناوبری از طریق مراکز شهر (به عنوان مثال، [ 11 ]) و مراکز خرید (به عنوان مثال، [ 12 ]). گردهمایی های عمومی و جشنواره ها (به عنوان مثال، [ 13 ]). شورش (مثلاً [ 14 ]) و خروج از ساختمان (مثلاً [ 15 ]).
شبیهسازیها با مدلهای مبتنی بر عامل بهعنوان آزمایشگاههای مصنوعی عمل میکنند که در آن میتوانیم ایدهها و فرضیههایی را درباره پدیدههایی که در دنیای واقعی به راحتی قابل بررسی نیستند، آزمایش کنیم، بهویژه برای پدیدههایی که درک فرآیندهای مربوطه و پیامدهای آنها مهم است [ 16 ].]. برای مثال، چنین شبیهسازیهایی ممکن است بینشهایی را در مورد روشی که افراد ساختمان را در هنگام آتشسوزی تخلیه میکنند، به ما ارائه دهد. ما میتوانیم یک ساختمان را در یک دنیای مصنوعی، بر اساس نقشههای طبقهبندی دقیق جغرافیایی، مدلسازی کنیم و آن را با عواملی که افراد مصنوعی را نمایندگی میکنند، پر کنیم. به این عوامل مجموعه ای از رفتارها داده می شود که اغلب مبتنی بر داده های تجربی یا کیفی است. سپس، محقق میتواند رویدادهای شبیهسازیشده (مثلاً یک آتشسوزی شبیهسازی شده) را آغاز کند و نحوه واکنش این عوامل، از جمله پیامدهای آبشاری واکنشهایشان (مانند تنگناها، ازدحامها) را مشاهده کند [ 17 ]]). این به ما اجازه میدهد تا سناریوهای متعددی را آزمایش کنیم تا اثرات یک رویداد واقعی را بسنجیم و قابلیتهای برنامهریزی خود را بهبود ببخشیم، به عنوان مثال، ارزیابی کنیم که چگونه طرحبندیهای مختلف ساختمان و تنظیمات اتاق میتوانند بر زمان تخلیه تأثیر بگذارند [ 18 ].
کیفیت این شبیهسازیها به شدت به مدل مورد استفاده و همچنین ویژگیهای فیزیکی (مثلاً سرعت راه رفتن) و رفتاری (مثلاً توزیع حجم ترافیک در یک صحنه و مدلهای شناختی عوامل) که برای توصیف حرکت عابر پیاده استفاده میشوند، بستگی دارد. . در اصل، چنین ویژگی هایی درک ما را از حرکت مردم در فضا منتقل می کند و برای تخصیص دقیق این ویژگی ها به داده هایی نیاز است. با این حال، جامعه مدلسازی عابر پیاده عمدتاً بر دادههای موقت و مقیاس محدود برای اعتبارسنجی این مدلها متکی بوده و هنوز هم هستند [ 3 ، 19 ]. همچنین کارهای محدودی در مورد مرتبط کردن این مدلها با ویژگیهای میکروسکوپی عابر پیاده انجام شده است زیرا ممکن است توسط منابع دیگر استخراج شوند (به عنوان مثال، [ 20 ]]). با این حال، این در چارچوب رویکردهایی مانند نیروهای اجتماعی هلبینگ و مولنار [ 21 ] بود، که فرض میکنند همه پیادهها به «نیروهای» اطراف خود پاسخ میدهند و هیچ شناخت درونی برای هدایت رفتارهایشان ندارند [ 22 ]. این به وضوح در مورد انسان های واقعی که دارای ویژگی های ذاتی هستند صدق نمی کند [ 3 ]. همانطور که گفته شد، ماهیت پیچیده رفتار انسان، همه مدل ها را صرفاً انتزاعی از واقعیت می کند، و چالش هایی را هم برای مدل های زور و هم برای مدل های مبتنی بر قانون ایجاد می کند. علاوه بر این، همانطور که تورنس و همکاران. [ 23 ] همچنین توجه داشته باشید، جمع آوری داده های مربوط به مسیرهای پیاده روی فردی یک چالش است و یک زمینه فعال تحقیقاتی است [ 20 ، 24 ]]، که اگر بخواهیم مدل های عابر پیاده با کیفیت بالا بسازیم هنوز باید به آن رسیدگی شود.
پیشرفت های تکنولوژیکی اخیر فرصتی را برای تغییر روش ساخت و کالیبره کردن مدل های عابر پیاده ارائه می دهد. به طور خاص، گسترش نظارت تصویری و افزایش قابلیتهای مکانیابی جغرافیایی در دستگاههای تلفن همراه مصرفکننده (مانند سیستم موقعیتیابی جهانی (GPS)، Wi-Fi یا قابلیتهای شناسایی فرکانس رادیویی (RFID) در تلفنهای هوشمند یا تبلتها)، بهویژه در شهری مناطق، اکنون ما را قادر می سازد تا مقادیر بی سابقه ای از مجموعه داده های تحرک عابر پیاده را تولید کنیم [ 23 ، 25 ]، که انبوهی از اطلاعات را با وضوح مکانی و زمانی خوب ارائه می دهد. همه این منابع می توانند مقادیر عظیمی از مجموعه داده های تحرک مکانی-زمانی را به عنوان بخشی از عصر نوظهور داده های مکانی بزرگ تولید کنند [ 26 ]]. بهرهبرداری از این اطلاعات برای بهبود مدلسازی عابر پیاده همچنان یک منطقه نسبتاً ناشناخته است، و این موضوعی است که در اینجا به آن پرداخته میشود.
در این مقاله ما رویکردی را برای بهبود مدلهای ساده عابر پیاده مبتنی بر مسیر از طریق استفاده از دادههای مسیر واقعی به منظور بهبود دقت آنها برای شبیهسازی و پیشبینی حرکت عابر پیاده ارائه میکنیم. به طور خاص، ما از مسیرهای عابر پیاده واقعی و متا اطلاعات به دست آمده از آنها برای کالیبره کردن یک ABM ساده استفاده میکنیم و نشان میدهیم که چگونه این عملکرد را بهبود میبخشد و به ABM اجازه میدهد تا بهتر با ویژگیهای رفتاری صحنه واقعی مطابقت داشته باشد. بنابراین، با ترکیب یک مدل ساده با دادههای صحنه واقعی، ابزاری قدرتمند برای تولید شبیهسازیهای قابل اعتماد از الگوهای حرکت عابر پیاده تولید میکنیم. ارزش گنجاندن این اطلاعات دو برابر است. اول، استفاده از داده های واقعی (به عنوان مثال، برگرفته از ردیابی) برای توصیف ویژگیهای رفتاری عوامل به جای تکیه بر پارامترهای عمومی، تواناییهای ما برای مدلسازی حرکت انسان در ABMها (به عنوان مثال، سرعت آنها و سرعت ورود/خروج آنها به یک صحنه) را افزایش میدهد. دوم، الگوهای مسیر، ساختار زیربنایی هر صحنه را همانطور که از طریق فعالیت های انسانی تعریف می شود، نشان می دهد. به این ترتیب، آنها ادراک مردم از فضا را به ما منتقل میکنند و به ما اجازه میدهند از یک رویکرد هندسی خالص (مثلاً با استفاده از نقشههای طبقه) که فقط فرم را در نظر میگیرد، به رویکردی که نحوه استفاده مردم از فضا را در نظر میگیرد حرکت کنیم.به عنوان مثال ، عملکرد آن نیز [ 27 ]. استفاده از چنین اطلاعاتی برای اطلاع رسانی یک ABM به ما این امکان را می دهد که کاربرد آن را با ویژگی های صحنه های مختلف تطبیق دهیم. ما از این رویکرد به عنوان یک ABM آگاه از صحنه و فعالیت ( SA 2 -ABM ) یاد می کنیم.
به عنوان مثال، استفاده از دادههای ردیابی برای استخراج مکانهای ورودی و خروجی عابران پیاده، توانایی در نظر گرفتن هر دو نقطه ورودی و خروجی فیزیکی (مثلاً درها) و نقاط ورودی و خروجی رفتاری (مثلاً منطقهای در یک فضای باز که توسط بیشتر عابران پیاده استفاده میشود را در نظر میگیرد. برای ورود به یک دهلیز)، در حالی که ردیابی حرکت عابران پیاده بین ورودی ها و خروجی ها به ما امکان می دهد پارامترهای حرکتی و الگوهای حرکتی را در آن فضا تخمین بزنیم. با ترکیب این دو مؤلفه (حرکت عابر پیاده، پارامترهای ناوبری و رفتاری و فضای فیزیکی) در یک مدل عابر پیاده واحد، می توان رفتار را کاوش و پیش بینی کرد .، مسیرها) عابران پیاده. در این مقاله ما رویکردی برای جمعآوری و تجزیه و تحلیل دادههای ردیابی به منظور اطلاعرسانی به یک ABM ارائه میکنیم. استفاده به عنوان یک مورد آزمایشی از یک صحنه داخلی. ادامه مقاله به شرح زیر تدوین شده است. در بخش 2 مروری بر چارچوب مدلسازی خود ارائه می کنیم. در بخش 3 ، مدل های صحنه فعالیت محور خود را، قبل از حرکت به ABM ( بخش 4 ) شرح می دهیم. سپس به نشان دادن تعدادی آزمایش با استفاده از دادههای مدلهای صحنه فعالیت و ABM ( بخش 5 ) ادامه میدهیم و در بخش 6 خلاصهای از مقاله و چشماندازی برای کار بیشتر ارائه میکنیم.
2. بررسی اجمالی رویکرد
انگیزه رویکرد ما از رشد سریع در دسترس بودن اطلاعات تحرک در قالب مسیرهای مکانی و زمانی ناشی می شود [ 28 ]. داده های تحرک را می توان از طریق قابلیت های مختلف موقعیت جغرافیایی، به عنوان مثال، از طریق استفاده از تلفن های همراه (به عنوان مثال، [ 29 ، 30 ])، RFID (به عنوان مثال، [ 31 ]) و GPS (به عنوان مثال، [ 32 ، 33 ]) جمع آوری کرد. این رویکردهای به خوبی تثبیت شده برای جمعآوری دادههای تحرک بیشتر با تکنیکهای جایگزین در حال ظهور مانند استفاده از دادههای مشتقشده از فناوری WiFi [ 34 ] و حتی دادههای عمومی ارتباطات در کل تکمیل میشوند [ 35 ].
از میان این تکنیکهای مختلفی که برای تولید اطلاعات حرکتی در دسترس است، ما به عنوان مرجع برای کار خود، تکنیک نظارت تصویری را انتخاب میکنیم، زیرا میتواند تعداد زیادی مسیر برای یک صحنه معین ایجاد کند، بنابراین درک بیشتری از الگوهای فعالیت رایج در آن منطقه، در مقایسه با نمونههای پراکنده در مناطق وسیعتر که توسط تکنیکهای ضبط تحرک جایگزین ارائه میشوند. علاوه بر این، نظارت تصویری نیز در حال گسترش است. سیستمهای نظارت تصویری در فضای داخلی و خارجی برای طیف گستردهای از امکانات، از بیمارستانها، مدارس، و مراکز خرید گرفته تا فرودگاهها، تأسیسات دولتی و تأسیسات نظامی مستقر هستند. به عنوان یک مرجع شاخص، تخمین زده می شود که در شهر شیکاگو تقریباً 10،36 ]. در بریتانیا، تا چند سال پیش، تخمین زده شد که بین 2 تا 4 میلیون تلویزیون مدار بسته (CCTV) مستقر شده است که بیش از 500000 عدد از آنها تنها در لندن کار می کنند [ 37 ، 38 ].
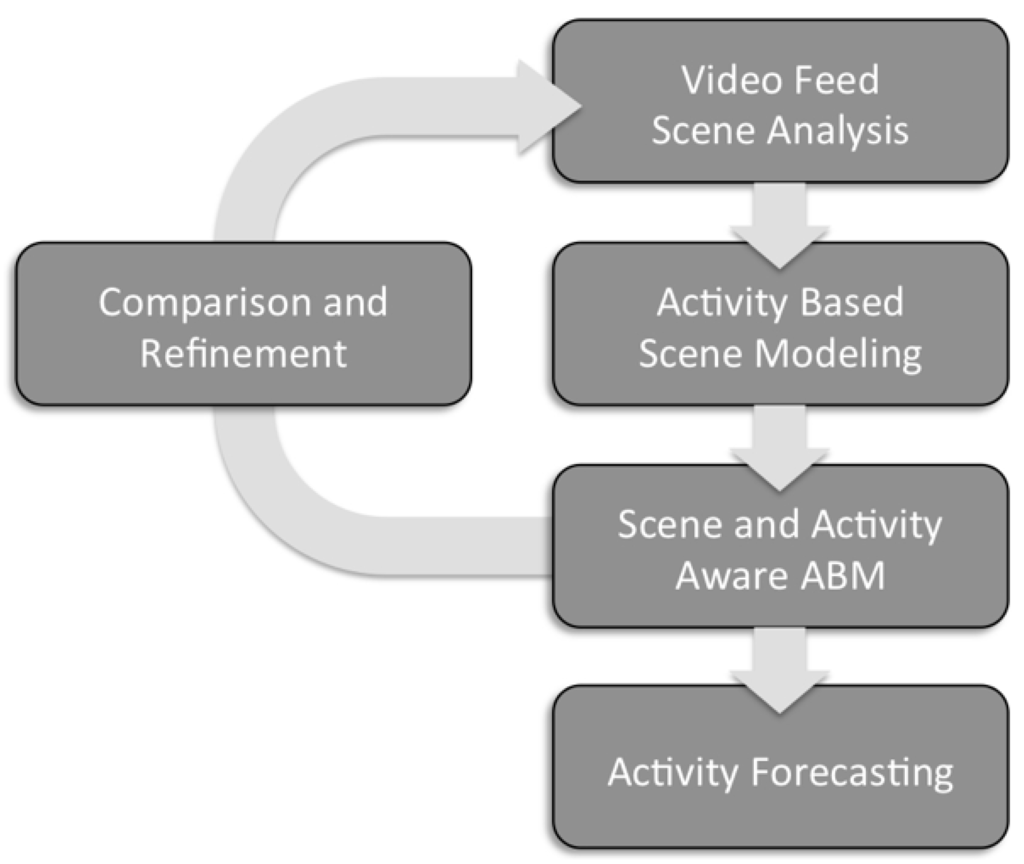
به منظور بهرهگیری از این دادهها برای ABMها، ما رویکردی را پیشنهاد میکنیم که از اطلاعات استخراجشده از مجموعه دادههای مسیری برای بهبود دقت مدلسازی استفاده میکند. در زمینه این مقاله، ما از اصطلاح “دقت” برای اشاره به میزان شباهت نتایج شبیه سازی به داده های واقعی در صحنه استفاده می کنیم. در اینجا باید اشاره کنیم که اگرچه ما بر حرکت عابر پیاده تمرکز می کنیم، رویکرد مشابهی را می توان برای سایر انواع حرکت (مثلاً ترافیک اتومبیل) نیز اعمال کرد. همانطور که در شکل 1 می بینیم، ما با تجزیه و تحلیل دادههای مسیر واقعی برای استخراج دانش فعالیت در قالب نقشههای حرارتی که تجمع مسیرها را در یک دوره زمانی معین نشان میدهند، و آمار فراوانی استفاده از ورودی/خروجی در صحنه خود ادامه میدهیم. در این مقاله از اصطلاح نقشه حرارتی برای اشاره به بازنمایی فعالیت کل (روندهای عمومی) در داخل صحنه استفاده می کنیم که می تواند به عنوان یک نقشه “اشغال” یا “تراکم” در نظر گرفته شود (همانطور که در [ 39 ، 40 ] بحث شد). سپس از این اطلاعات برای بهبود یک ABM اولیه با اطلاع دادن به پارامترهای آن با حرکت (مثلاً سرعت راه رفتن) و ویژگیهای رفتاری (مثلاً توزیع حجم ترافیک در یک صحنه) برای صحنه استفاده میکنیم، بنابراین یک ABM آگاه از صحنه و فعالیت ایجاد میکنیم. ( SA 2 -ABMهمانطور که در بخش 4 بحث خواهیم کرد . ما از طریق آزمایشهای بخش 5 نشان خواهیم داد که این به ما امکان میدهد دقت شبیهسازیهای خود را بهبود بخشیم، بنابراین مناسب بودن آنها را برای پیشبینی افزایش دهیم.
شکل 1. نمودار جریان رویکرد.
شکل 1نمای کلی از مراحل پردازش در رویکرد ما را نشان می دهد. در مرحله اول، ما فرض میکنیم که دادههای حرکت عابر پیاده از طریق یک سیستم نظارت تصویری جمعآوری میشود که منجر به مجموعهای از مسیرها میشود. لازم به ذکر است که اگرچه ما از یک سیستم ویدئویی در این نمای کلی استفاده می کنیم، اما سایر فناوری های موقعیت جغرافیایی (مثلاً GPS) نیز می توانند مورد استفاده قرار گیرند، با این فرض که مجموعه داده های به اندازه کافی متراکم و معرف برای منطقه مورد نظر در اختیار ما قرار می دهند. در مرحله دوم، صحنه مشاهده شده را بر اساس فعالیتهای عابر پیاده حاصل از مسیرها مدلسازی میکنیم. این شامل تشخیص نقاط ورود و خروج، الگوهای حرکتی بین چنین نقاطی و پارامترهای حرکتی برای هر الگو است. در نتیجه این مرحله، یک مدل دقیق از صحنه (شامل ساختار آن، حرکت عابر پیاده و پارامترهای رفتار، و الگوهای حرکتی) مشتق شده است. با انجام این کار، ما نه تنها اطلاعات صریح (مثلاً نقاط ورودی و خروجی)، بلکه ضمنی (مثلاً مسیرهای محبوب، موانع) را نیز می گیریم که اغلب در نقشه های طبقات، چیدمان ها یا سایر وسایلی که معمولاً تا به حال استفاده می شود، وجود ندارد. فضایی را بسازید که شبیه سازی در آن انجام می شود. سپس از این مدل برای ساختن a استفاده می شودSA 2 -ABM ، که می تواند با داده های صحنه مشاهده شده مقایسه شود و بر این اساس پالایش شود. پس از ساخته شدن، SA 2 -ABM میتواند برای ارائه پیشبینیها از طریق شبیهسازی تحت شرایط مختلف (مثلاً بررسی چگونگی توسعه یک رویداد در حال انجام تحت شرایط مختلف) استفاده شود. این فرآیند میتواند به صورت دورهای پیادهسازی شود و پارامترهای مختلف را در یک زمان معرفی کند تا سهم هر یک شناسایی شود، بنابراین از اضافهبارهای محاسباتی غیر ضروری جلوگیری میشود.
3. اطلاعات فعالیت صحنه برداشت
تجزیه و تحلیل مسیرهای مکانی-زمانی در دهه گذشته توجه گسترده ای را در جوامع جغرافیایی و پایگاه داده به خود جلب کرده است، که با معرفی انواع رویکردها برای نمایه سازی آنها برای پس پردازش شروع شده است (به عنوان مثال، [ 41 ]). از میان مجموعه وسیعی از کارهایی که منجر به پیشرفتهای فنی کنونی در تحلیل حرکت محاسباتی شده است [ 28 ]، میتوانیم توسعه رویکردهای پیچیده ردیابی اشیاء را از طریق خوشهمحور [ 42 ] غیر مرتبط با کار خود شناسایی کنیم. رویکردهای مبتنی بر خوشه [ 43 ] و الگوی مبتنی بر حرکت داده کاوی مانند رویکرد TMP-Mine Tseng و Lin [ 44 ]]. پیشرفت سطح تحلیل برای استخراج اطلاعات معنایی برای مسیرهای ثبت شده، کار Spaccapietra و همکاران را داشتیم. [ 45 ] به سمت یک رویکرد مبتنی بر معناشناسی برای تحلیل مسیر، با در نظر گرفتن توقف ها و حرکت ها برای درک اقدامات و فعالیت ها. بوگورنی و همکاران [ 46 ] بر این اساس ساخته شده است و چارچوبی برای الگوبرداری معنایی و اجرای آن در Weka-STMP ارائه میکند. علیرغم این پیشرفتها، تلاشها برای شناسایی صحنههایی که با الگوهای متمایز فعالیت مشخص میشوند، در جوامع GIS و پایگاهداده محدود هستند، به استثنای قابلتوجه چارچوب TraClass از لی و همکاران. [ 47] که رویکردی سلسله مراتبی، مبتنی بر منطقه (شناسایی مناطقی که انواع خاصی از مسیرها حضور غالب دارند) و مبتنی بر مسیر (تجزیه و تحلیل پارتیشن های مسیر) ارائه کرد.
به موازات این تلاشهای جوامع جغرافیایی و پایگاهداده، جامعه بینایی رایانه مدلسازی فعالیتهای صحنه در زمینه برنامههای نظارتی در سطوح مختلف جزئیات را مورد توجه قرار داده است. در این زمینه، گروهی از رویکردها بر تشخیص طرح صحنه در محیطهای ساختاریافته (مانند ورودی/خروجی ساختمان، پیادهروها، جادهها، تقاطعها) برای پشتیبانی از برنامههای نظارتی از طریق حاشیهنویسی فعالیت متمرکز شدهاند. مکریس و الیس [ 48 ] رویکردی برای یادگیری معناشناسی صحنه (به عنوان مثال، مناطق ورود و خروج، اتصالات، مسیرها) از یک جریان ویدئو با استفاده از روشهای بدون نظارت ارائه کردهاند. اخیراً، ندریش و دیویس [ 49] مناطق حرکت منسجم را از داده های ردیابی شناسایی کرد و این اطلاعات را برای تشخیص ساختار صحنه به کار برد. کمباوی و همکاران [ 50 ] یک سیستم درک ویدیویی برای شناسایی عناصر صحنه مختلف، مانند جادهها، پیادهروها و ایستگاههای اتوبوس، با استفاده از مدلهای احتمالی در چارچوب شبکه منطقی مارکوف توسعه داد. از دیدگاه تشخیص طبقه بندی اشیاء تا تحلیل صحنه، تورک و همکاران. [ 51 ] رویکردی برای تجزیه و تحلیل یک صحنه ویدیویی بر اساس رفتار اجسام متحرک در داخل و اطراف آنها پیشنهاد کرد.
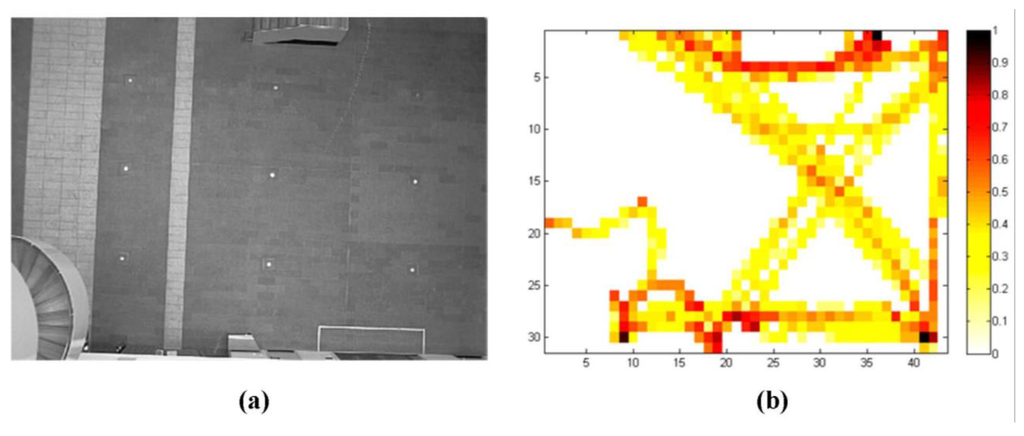
شکل 2. ( الف ) یک صحنه. و ( ب ) نقشه حرارتی فعالیت متناظر آن که تجمعی از مسیرها را در آن صحنه در مدت یک ساعت نشان می دهد. کاشی های سفید مناطقی را مشخص می کنند که در آن دوره بازدید نشده باقی می مانند، و با افزایش ارزش ها، طرح رنگ آمیزی از سفید به زرد و قرمز برای کاشی های پربازدید در صحنه تغییر می کند.
گروه دیگری از رویکردها بر تقسیمبندی الگوهای حرکتی غالب (مثلاً چرخش وسایل نقلیه، گذرگاههای عابر پیاده) برای درک صحنه متمرکز شدهاند. به عنوان مثال، وانگ و همکاران. [ 52 ] یک مدل بیزی سلسله مراتبی برای یافتن فعالیتها و تعاملات «اتمی» معمولی در صحنههای پیچیده (مانند توقف وسایل نقلیه برای عبور عابران از خیابان) پیشنهاد کرد. سینگ و همکاران [ 53 ] بر روی تشخیص فعالیت غیرمعمول تمرکز کرد، به عنوان مثال افرادی که اشیاء را حمل یا رها می کنند. خو و همکاران [ 54] یک تجزیه و تحلیل مکانی-زمانی از صحنه های محوطه دانشگاه که توسط یک شبکه دوربین در فضای باز نظارت می شد ارائه کرد. آنها میانگین جریان نوری را در مدت کوتاهی برای نشان دادن شلوغی صحنه اعمال کردند و رابطه بین الگوهای فعالیت و برنامه کلاس های دانشگاه را بررسی کردند. گیرگنسون و همکاران [ 55 ]، روی مقایسه فعالیت ها از طریق استفاده از نقشه های حرارتی کار کردند.
از آنجایی که اطلاعات ردیابی کل ما به شکل یک نقشه حرارتی است [ 56 ]، و از آنجایی که هدف ABM در زمینه این نشریه نیز تولید الگوهای حرکت در سطح کل است، ما تصمیم گرفتیم با استفاده از نقشههای حرارتی فعالیت بهعنوان مجموعهای از بیانهای فضایی و زمانی مسیرهایی که از یک صحنه مورد علاقه عبور میکنند. این امر مقایسه مستقیم بین مدل عابر پیاده و داده های صحنه را تسهیل می کند. نقشه حرارتی فعالیت بیان می کند که یک مکان خاص در یک صحنه چقدر توسط یک مسیر بازدید می شود. برای مثال، اجازه دهید فرض کنیم که مجموعه ای از m مسیرهای ثبت شده در یک صحنه را به عنوان ورودی برای تحلیل خود داریم:
هر مسیر trj i شامل دنباله ای از نقاط مسیر است، به شکل مجموعه ای از جفت مختصات مرتب شده با زمان ( xi ( t ) ، y i ( t ) ):
که در آن هر جفت مختصات مکان ثبت شده یک فرد ردیابی شده i را در زمان t نشان می دهد. سپس، نقشه حرارتی فعالیت برای این صحنه با تسلیت فضا به سلول های مربعی و نسبت دادن به هر سلول یک مقدار گرما h که تابعی از تعداد عبور از این سلول توسط مجموعه مسیرهای ما است، تخمین زده می شود. به طور خاص، مقدار گرمای h ( x,y ) یک سلول با مختصات (x,y) در فضای صحنه ما متریک نرمال شده است:
که در آن متقاطع ( x,y ) تعداد مسیرهایی است که سلولهای ( x,y ) , min( متقاطع (⋅,⋅)) (و max( متقاطع (⋅,⋅))) حداقل (و حداکثر به طور قابل احترام) هستند. در میان مجموعه تمام مقادیر متقاطع متقاطع (⋅،⋅) در صحنه ما. در این معادله (⋅،⋅) به دو سلول اشاره دارد که بین آنها یک تلاقی رخ می دهد. شکل 2 صحنه فیزیکی (چپ) و نقشه حرارتی فعالیت مربوط به آن (راست) را نشان می دهد. نقشه های حرارتی اغلب برای تجزیه و تحلیل فعالیت فضای داخلی و خارجی استفاده می شود (به عنوان مثال، [ 55 ، 57]). برای روش ما، نقشه های حرارتی دو مزیت متمایز ارائه می دهند. اول، به طور طبیعی دانش را در مورد صحنه منتقل می کند: به عنوان مثال، به ما امکان می دهد مسیرهای محبوب را شناسایی کنیم (وصل کردن سمت راست پایین به سمت چپ بالا در شکل 2 ). دوم، به ما امکان تجسم اتصالات در فضا را می دهد: هر سلول دارای 8 همسایه است (مثلاً محله مور)، و با مقایسه مقادیر گرمای مربوطه، می توانیم تخمین آگاهانه ای را در محتمل ترین مرحله بعدی با توجه به مکانی در امتداد یک مسیر محاسبه کنیم. ، که به ویژه برای مشکل شبیه سازی که ما به آن می پردازیم مناسب است (به بخش 4.4.2 مراجعه کنید.). ما این نقشه حرارتی را با مکانهای ورودی و خروجی برای صحنه خود تکمیل میکنیم (بهطور پیشفرض بهعنوان خوشههایی از مکانهایی که به ترتیب شروع و پایان مسیرها شناسایی میشوند) و یک جدول فرکانس که اتصالات ورودی-خروجی را نشان میدهد (همچنین بهطور پیش پاافتاده از مسیرها مشخص میشود) تا یک تصویر جامع و در عین حال آسان ارائه کنیم. برای استفاده از مدل مبتنی بر فعالیت صحنه ما که برنامه SA 2 -ABM ما را هدایت می کند.
4. مدل مبتنی بر عامل مبتنی بر صحنه و فعالیت (SA 2 -ABM)
هدف SA 2 -ABM ارتقاء یک ABM پایه از طریق مجموعه ای ساده از قوانین شناسایی شده با استفاده از مدل های فعالیت محور بخش 3 است. این ABM با قوانین رفتاری ساده ای که در زیر به منظور تولید الگوهای واقعی تر حرکت عابر پیاده ارائه شده است، تقویت شده است. این قوانین با داده های واقعی حرکت عابر پیاده و اطلاعات مربوط به محیط فیزیکی که عابران پیاده از طریق آن حرکت می کنند، همانطور که در بخش 3 مورد بحث قرار گرفت، اطلاع رسانی می شود . ما این را با داده های دیگری از ادبیات حرکت عابر پیاده در صورت لزوم تکمیل می کنیم. به عنوان مثال، به خوبی شناخته شده است که مردم با سرعت های مختلف راه می روند (به عنوان مثال، [ 58 ، 59])؛ از تجزیه و تحلیل اطلاعات صحنه خاص خود دریافتیم که حداکثر سرعت راه رفتن 1.5 متر در ثانیه است و این همان چیزی است که ما در مدل برای حداکثر سرعت راه رفتن عوامل خود استفاده می کنیم. نلسون و موورر [ 60 ] همچنین خاطرنشان می کنند که انسان ها ترجیح روانی برای اجتناب از تماس بدنی دارند که توسط فروین [ 59 ] به عنوان “بیضی بدن” تعریف شده است. در این مدل، ما برای سادگی محاسباتی، اندازه عامل را 37.5 سانتی متر در 37.5 سانتی متر تعیین کردیم (با در نظر گرفتن ابعاد انسانی و بیضی بدن [ 61 ]])، از آنجایی که ما از یک نمایش محفظه از یک شبکه معمولی استفاده می کنیم که اغلب همه عوامل را دارای اندازه یکسانی در نظر می گیرد. رویکردهای جایگزین با استفاده از بازنمایی پیوسته فضایی به اندازههای مختلف عوامل عابر پیاده اجازه میدهد (به عنوان مثال، برای مطابقت با اندازههای متناظر استخراجشده از فیدهای ویدئویی [ 62 ])، اما با هزینههای محاسباتی قابلتوجه [ 63 ]. چنین نمایشهای دقیقی از اندازه عابران پیاده بدون انتقال به یک فضای پیوسته تأثیر قابلتوجهی بر نتایج ABM زیر نخواهد داشت (اگر به تنگناها یا تخلیه از فضاهای محدود نگاه کنیم، ممکن است متفاوت باشد).
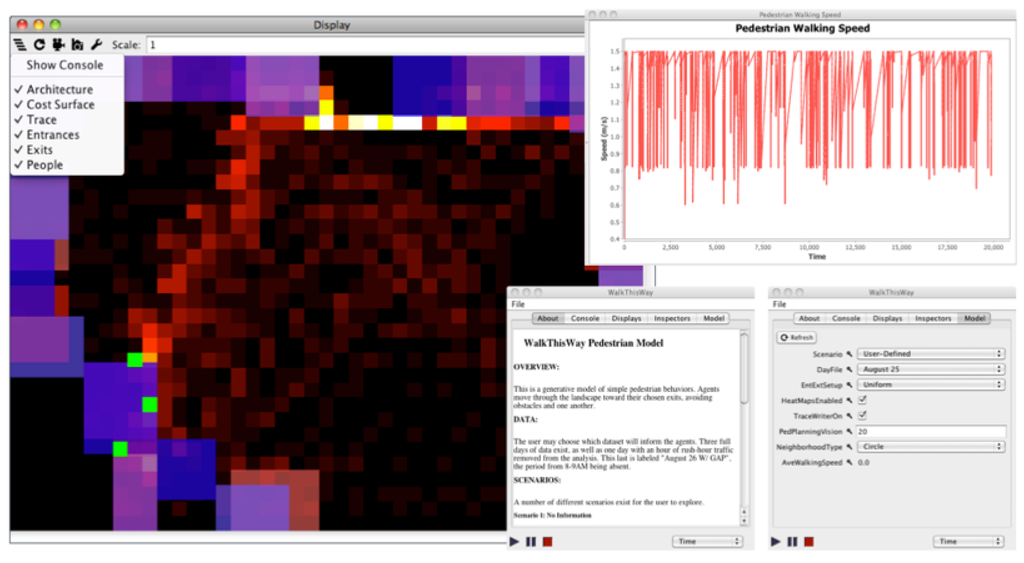
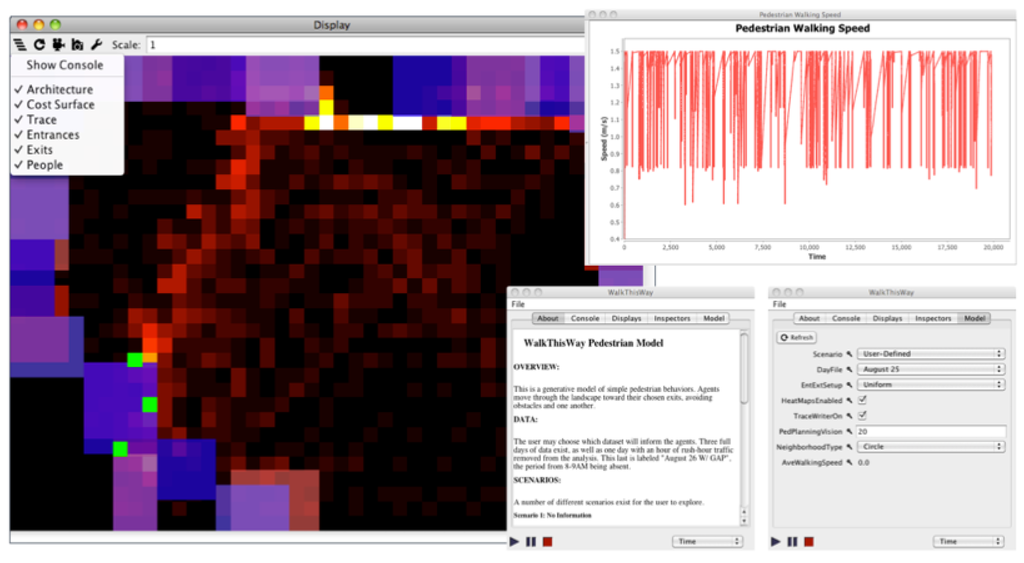
SA 2 -ABM در جاوا با استفاده و گسترش ابزار شبیه سازی MASON [ 64 ] برنامه ریزی شده است. ما یک فایل اجرایی از مدل، کد منبع و تمام دادههای ارائه شده در این مقاله در https://www.openabm.org/model/4706/version/1 برای کمک به تکرار و آزمایش ارائه کردهایم. در شکل 3ما رابط کاربری گرافیکی (GUI) مدل را نشان می دهیم. در جهت عقربههای ساعت از بالا سمت چپ، رابط کاربری گرافیکی دارای یک نقشه با گزینهای برای مشاهده یا پنهان کردن هر لایه داده، نموداری است که سرعت راه رفتن را در طول زمان خلاصه میکند و کنترلکننده مدل. کنترلکننده مدل به کاربر اجازه میدهد شبیهسازی را مقداردهی اولیه، مکث یا متوقف کند، نمایشگرهای پنهان یا نمایش داده شده را کنترل کند، و برخی از اطلاعات اولیه مدل را همراه با اجرای سناریوهای مختلف ارائه شده در زیر مشاهده کند. چنین رابطی امکان استفاده آسان در درک و اشکال زدایی مدل را فراهم می کند [ 65 ].
بهجای اتخاذ یک رویکرد مدلسازی مبتنی بر اجبار (به عنوان مثال، [ 21 ])، که اغلب افراد را بهعنوان پاسخدهنده به «نیروهای» اعمالشده توسط دیگران و محیطی که برخی استدلال میکنند در این فرض که عابران پیاده توانایی تصمیمگیری درونی ندارند، یک اشتباه زیستمحیطی ایجاد میکند، پاسخ میدهد. [ 3 ، 63 ]، در اینجا ما بر روی اقدامات موجودیت های فردی تمرکز می کنیم (به عنوان مثال ، یک رویکرد مبتنی بر قانون، برای بحث در مورد تفاوت ها به [ 22 ] مراجعه کنید) در یک محیط مبتنی بر سلول (شبیه به کار [ 13 ]).]). انتخاب مسیر جزء مهمی از هر مدل عابر پیاده است، زیرا فرآیند پویایی را توصیف میکند که از طریق آن افراد در یک صحنه حرکت میکنند، تصمیمگیری و ارزیابی مجدد با گذشت زمان و تغییر ترافیک صحنه با آن. انتخاب مسیر یک حوزه فعال تحقیقاتی است که رشتههای متعددی مانند روانشناسی [ 66 ، 67 ]، جغرافیا [ 3 ]، مهندسی [ 68 ، 69 ]، گرافیک کامپیوتری [ 70 ، 71 ] را در بر میگیرد. از نظر محاسباتی، این یک موضوع چالش برانگیز است، هم از نظر مشکلات نظری و هم از نظر مشکلات عملی مرتبط با توصیف رفتار عابر پیاده. دو رویکرد رایج برای انتخاب مسیر، کوتاهترین مسیر وعلائم زیر [ 69 ]. رویکرد کوتاهترین مسیر مبتنی بر این تصور است که افراد میخواهند مسافتی را که باید طی کنند به حداقل برسانند و این لزوماً مسیری نیست که با علائم نشان داده شده است. با این حال، لازم به ذکر است که کوتاه ترین مسیر ممکن است سریع ترین مسیر نباشد، به عنوان مثال اگر عابران پیاده زیادی در کوتاه ترین مسیر وجود داشته باشند، سرعت ماموران را کاهش می دهد. برای محاسبه سریعترین مسیر، باید مسیریابی پویا را در نظر بگیرید [ 68 ]. هم کوتاه ترین مسیر و هم رویکردهای علائم زیر به چشم انداز محوطه عابر پیاده مربوط می شود که زمانی که آنها محیط خود را بشناسند یا ندانند متفاوت است. افرادی که با ساختمان آشنا هستند، دانش ذاتی وسیع تری از آن خواهند داشت (به عنوان مثال، آنها قادر به محاسبه کوتاه ترین مسیر هستند)، در حالی که بازدیدکنندگان با دانش محدود در مورد چیدمان ساختمان به احتمال زیاد علائم اضطراری را دنبال می کنند [ 68 ، 72 ]. در اینجا ما سادهترین گزینه را انتخاب میکنیم که در آن عابران پیاده در ابتدا کوتاهترین مسیر را بین ورودی و خروجی دنبال میکنند، اما از آنجایی که یک خط دید دارند و برای اجتناب از موانع و عوامل دیگر برنامهریزی مسیر پویا را انجام میدهند (به بخش 4.4.2 مراجعه کنید ). سریع ترین مسیر این همچنین با اندازه منطقه مورد بررسی مطابقت دارد، جایی که دانش ذاتی محیط تأثیر زیادی بر تصمیمات مسیریابی ندارد، که در عوض توسط شناسایی بصری ورودی ها و خروجی ها هدایت می شود. اثر هیلیر و همکاران. [ 73] این ایده را تقویت می کند، به این معنا که آنها نشان دادند که اکثریت حرکت انسان در امتداد خطوط بینایی اتفاق می افتد همچنین، همانطور که در بسیاری از ABM های حرکت عابر پیاده رایج است، ما مکان های ورودی و خروجی را از قبل برنامه ریزی کرده ایم (به بخش 4.4.1 مراجعه کنید ) اطلاعات از خود صحنه (همانطور که در بخش 3 بحث شد ) اما انتخاب مسیر در زمان اجرا تعیین می شود. باقیمانده این بخش به طور مفصل ABM را به دنبال مرور کلی، مفاهیم طراحی و پروتکل جزئیات (ODD) مورد حمایت گریم و همکاران توضیح میدهد. [ 74 ] در میان دیگران.
شکل 3. رابط کاربری گرافیکی مدل SA 2 -ABM .
4.1. متغیرهای حالت و مقیاس
شبیه سازی ما به عوامل عابر پیاده پرداخته است. اشیاء عابر پیاده حضور فیزیکی دارند، به این صورت که به طور منحصر به فرد مکانی در محیط و همچنین یک نقطه مقصد نهایی را اشغال می کنند که از طریق آن قصد خروج از شبیه سازی را دارند. هدف این ماموران حرکت به سمت محل های خروجی خود در سریع ترین زمان ممکن است. آنها این کار را از طریق کوتاهترین مسیر انجام میدهند، اما اگر در مسیر با موانعی (مانند سایر عابران پیاده) مواجه شوند، این مسیر میتواند تغییر کند (به بخش 4.4.2 مراجعه کنید).). آنها در رسیدن به این هدف با حضور عوامل یا موانع دیگر در شبیه سازی و حداکثر سرعت راه رفتنشان محدود می شوند. توانایی آنها برای برنامهریزی مسیرهای آیندهشان با «دید»شان که در این مورد 7.5 متر است (وسعت منطقهای که مدلسازی میشود)، یا فاصلهای که در مقابل خود میتوانند هنگام برنامهریزی مسیرشان نگاه کنند، محدود میشود. در طول توسعه مدل، طیف وسیعی از پارامترهای بینایی را از 1 سلول جلو تا کل صحنه بررسی کردیم. تنظیم دید روی مقدار کم منجر به الگوهای راه رفتن غیرواقعی شد و از آنجایی که این یک صحنه باز مسطح و نسبتاً کوچک است، ما فکر کردیم مناسب است که طیف بصری کامل منطقه را به عوامل ارائه دهیم. عوامل در محیطی قرار می گیرند که دارای موانع غیر متحرک (پله ها، غرفه های اطلاعات، فواره ها و غیره ) است.) و همچنین موانع متحرک (سایر عابرین پیاده). عابران پیاده نیز از جنبه های کمتر ملموس این وضعیت آگاه هستند: آنها می دانند که عابران پیاده دیگر در گذشته چقدر از مکان های مختلف عبور کرده اند و از یک ورودی معین به یک خروجی خاص حرکت می کنند. نقشه های حرارتی به دست آمده از فعالیت صحنه می توانند این اطلاعات را ارائه دهند. این شبیه به مفهوم ظهور یک سیستم ردیابی است که در آن مسیرها بدون برنامه ریزی یا ارتباط از سوی کاربران آشکار می شوند [ 75 ]]، به این معنا که مسیرهای عبور از یک زمین چمن، حتی زمانی که مزرعه هیچ مانع اساسی ندارد، توسعه مییابد و یک مسیر مستقیمتر اما کمتر پیادهرویشده ممکن است بهطور قابل اثبات کوتاهتر باشد. انتخاب ماموران برای حرکت مطابق با نقشه حرارتی چندین مشابه طبیعی در دنیای واقعی دارد، از جمله روشی که افراد از رفتار دیگرانی که جلوتر از آنها راه میروند کپی میکنند یا روشی که الگوهای حرکتی میتوانند در نهایت مسیر پیادهروی را ردیابی کنند. نشانه های فیزیکی دیگری از عبور دیگران، نشان می دهد که کجا باید راه بروید. این لزوما به این معنی نیست که عابران پیاده به دنبال مکان های شلوغ هستند، بلکه به این معنی است که آنها تمایل دارند مسیرهای قبلی را دنبال کنند. این اطلاعات با فاصله صریح بین یک مکان معین و نقطه هدف ترکیب می شود تا یک گرادیان تشکیل شود که عامل به سمت هدف خود به سمت پایین حرکت می کند.بخش 4.4.2 بر الگوهای حرکتی در مقیاس کلان در طول شبیهسازی تأثیر میگذارد، و این که کدام گرادیانها منجر به الگوهای واقعی حرکت میشوند.
از آنجایی که هدف مدل اتصال تصمیم گیری سطح پایین و ساده با الگوهای ماکروسکوپی است، هم یک نقشه حرارتی که درجه استفاده از مکان های مختلف را اندازه گیری می کند و هم یک رکورد کامل از حرکت هر عامل در پایان ذخیره می شود. شبیه سازی سپس از این اطلاعات می توان برای سنجش موفقیت مدل ما در بازآفرینی الگوهای واقعی حرکت استفاده کرد. سپس نتایج حاصل از SA 2 -ABM را می توان با داده های دنیای واقعی مقایسه کرد (همانطور که در بخش 5 نشان داده خواهد شد ).
4.2. بررسی اجمالی فرآیند و زمانبندی
شبیه سازی در زمان گسسته اندازه گیری می شود که هر تیک یک ثانیه از زمان را نشان می دهد. دو فرآیند وجود دارد که توسط زمانبندی انجام می شود، یعنی حرکت عامل و افزودن عوامل جدید به شبیه سازی. اولی در هر مرحله از شبیه سازی اتفاق می افتد، زیرا هر عامل مکان جدیدی را انتخاب می کند و موقعیت خود را بر اساس آن به روز می کند. کارگزاران مکان های خود را به ترتیب افزایش فاصله از نقطه هدف فرد، یکی یکی به روز می کنند. افزودن عاملهای جدید به شبیهسازی بهطور تصادفی اتفاق میافتد، با هر افزودن عامل جدید n مرحله زمانی پس از اضافه قبلی، n برنامهریزی میشود.به طور یکنواخت روی اعداد صحیح توزیع شده و دارای مقدار مورد انتظار میانگین زمان بین اضافات در دنیای واقعی است. اضافه شدن یک عابر پیاده ممکن است در هر نقطه از مرحله زمانی اتفاق بیفتد. اگر کاربر بخواهد، به جای تولید تصادفی عابران پیاده، سیستم میتواند رکورد زمانهای واقعی ورود عابران پیاده به سیستم را بخواند و مجموعهای از عوامل را بر اساس این دادههای دنیای واقعی مقداردهی اولیه کند. این به محقق اجازه می دهد تا مسیرهای تولید شده ناشی از دنیای خلاف واقع شبیه سازی را با اطلاعات مسیر واقعی به طور صریح مقایسه کند.
4.3. مفاهیم طراحی
این مدل دارای تعدادی از مفاهیم مهم طراحی است. در میان این موارد اولیه، پیش بینی، حس کردن، تعامل و تصادفی بودن است. هدف مدل مشاهده ظهور الگوهای واقع گرایانه در استفاده از فضا است.
-
ویژگی های پیش بینی در شبیه سازی از نظر برنامه ریزی مسیر عامل. ماموران به جلو نگاه می کنند و به سمت فضای خالی هدایت می شوند و به سمت فضای اشغال نشده حرکت نمی کنند. آنها عوامل دیگر را برای پیش بینی اینکه در آینده کجا خواهند بود ردیابی نمی کنند (به عنوان مثال ، ما اجتناب از برخورد (مانند [ 3 ، 76 ]) را مدل نمی کنیم، زیرا این کار از نظر محاسباتی گران است)، به منظور برنامه ریزی پیرامون این مسیرهای آینده. ، اما آنها در اطراف عوامل دیگر حرکت می کنند و به صورت پویا تغییر مسیر می دهند.
-
حس کردن: دو جنبه از محیط وجود دارد که عوامل می توانند آن را حس کنند، یعنی وجود عوامل دیگر یا وجود موانع بی حرکت و دائمی تر. کارگزاران در برنامه ریزی مسیرهای خود بین این دو نوع مانع حرکت تمایز قائل نمی شوند.
-
تعامل: عوامل محیطی را تعریف می کنند که سایر عوامل در آن حرکت می کنند، زیرا آنها خودشان مانع هستند. در نتیجه، مجموعه مکانهای «ممانعتشده» در هر مرحله از شبیهسازی تغییر میکند. بنابراین تعامل بین عوامل منحصراً از طریق تأثیر آنها بر چشم انداز انجام می شود.
-
تصادفی به عنوان تابعی از افزودن عوامل به شبیه سازی وارد مدل می شود. هنگامی که یک عابر پیاده جدید به طور تصادفی تولید می شود، ورودی را انتخاب می کند که از طریق آن بر اساس توزیع ورودی ها وارد شبیه سازی شود. پس از انتخاب آن ورودی، سپس خروجی را که میخواهد از توزیع مقاصد خروجی با توجه به ورودی خود به آن برسد، انتخاب میکند. این توزیع ها را می توان از داده ها استخراج کرد، اما همچنان منبع تصادفی در شبیه سازی هستند. همانطور که در بالا توضیح داده شد، مقیاس زمانی که در آن عوامل به شبیه سازی اضافه می شوند نیز مشمول تصادفی هستند.
4.4. جزئیات
در بخش زیر جزئیات بیشتری در مورد پیچیدگیهای مدل ارائه میشود، بهویژه اینکه مدل چگونه مقداردهی اولیه میشود و مدل چه چیزی را به عنوان ورودی میگیرد ( بخش 4.4.1 ) قبل از بحث درباره مدلهای فرعی برای تولید گرادیان و برنامهریزی حرکت ( بخش 4.4. 2 ).
4.4.1. اولیه سازی مدل
شبیه سازی با استفاده از ویژگی های هندسی و رفتاری همانطور که در بخش 3 ارائه شد، مقداردهی اولیه می شود . توزیع احتمالات استفاده از ورودی و احتمال انتخاب خروج مشروط ورودی از داده های ردیابی صحنه واقعی برداشت شد. مقادیر آنها در جدول 1 و جدول 2 نشان داده شده است. از تجزیه و تحلیل داده های مسیر، خروجی های بیشتری نسبت به ورودی ها شناسایی شد. ورودی های خاصی در 25 آگوست مورد استفاده قرار نگرفتند اما در روزهای دیگر مورد استفاده قرار گرفتند بنابراین برای کامل بودن در شبیه سازی استفاده می شوند. شکل 4 مکان این ورودی ها و خروجی ها را نشان می دهد. به عنوان مثال، ورودی 14 بیشترین استفاده را در 25 آگوست، زمانی که عابران پیاده در حال ورود به صحنه هستند، همانطور که در نشان داده شده است، است.جدول 1 . هنگامی که عوامل از طریق این ورودی وارد شدند، احتمال مشخصی برای خروج از صحنه از طریق هر خروجی وجود دارد – برای مثال، 46٪ از تمام عابران پیاده که از طریق ورودی 14 وارد می شوند، همانطور که در جدول 2 نشان داده شده است، از خروجی 6 خارج می شوند . این توزیعها در شبیهسازی خوانده میشوند، همانطور که مکان هر گونه مانع در چشمانداز براساس فعالیت صحنه برداشت خوانده میشود. گرادیان های مرتبط با هر جفت ورودی-خروجی نیز برای استفاده توسط عوامل در شبیه سازی خوانده می شوند. داده های اضافی ورودی به مدل شامل مکان های موانع است. ابتدا یک عامل به شبیه سازی اضافه می شود و سپس شبیه سازی شروع می شود.
جدول 1. احتمالات ورودی برای هر ورودی برگرفته از فعالیت های صحنه.
این داده ردیابی خام مورد استفاده در این آزمایش از پایگاه داده عابر پیاده انجمن انفورماتیک ادینبورگ [ 77 ] بر اساس یک تاریخ خاص (25 اوت 2009) گرفته شد و برای ارائه اطلاعات فعالیت صحنه همانطور که در بخش 3 بحث شد پردازش شد . دادههای ردیابی از فیدهای ویدئویی با وضوح 640 در 480 پیکسل به دست آمدهاند که هر پیکسل دارای ردپای فضایی 24.7 در 24.7 میلیمتر بود. پردازش دادههای ویدیویی منجر به دقت ردیابی تقریباً 9 سانتیمتر [ 78 ] شد، در حالی که این خطای بزرگتری در مقایسه با [ 79 ] است (خوانندگانی که مایل به استفاده از ابزاری برای استخراج خودکار مسیرهای عابر پیاده از ضبطهای ویدیویی هستند، باید http را مشاهده کنند. ://www.fz-juelich.de/jsc/petrack/ [80]) که حداکثر خطای آن 5.1 سانتی متر بود، برای کاربرد ما به اندازه کافی خوب در نظر گرفته می شود، به این معنا که ما به حرکت عمومی عابران پیاده در یک صحنه علاقه مند هستیم، نه حرکت دقیق آنها. به خصوص که ما اطلاعات صحنه را دوباره نمونهبرداری میکنیم تا ابعاد انسانی عابران پیاده را در نظر بگیریم (همانطور که در زیر بحث میشود). برای شبیهسازیهای ما، یک صحنه 43 در 32 سلول (که در مجموع 1376 سلول را میسازد، که 1231 سلول به دلیل موانع موجود قابل پیادهروی هستند)، که هر کدام دارای ردپای فضایی 37.5 در 37.5 سانتیمتر هستند تا ابعاد انسانی عابران پیاده را بهتر منعکس کند. (همانطور که در بالا بحث شد).63 ] با این حال، این توانایی ما را برای نمایش اندازه های مختلف عابران پیاده مانند آنچه در [ 3 ] دیده می شود، محدود می کند.
جدول 2. احتمالات ورود و خروج برای هر جفت ورودی و خروجی حاصل از فعالیت های صحنه.
شکل 4. ( الف ) محل ورودی ها. ( ب ) و خارج می شود. مکانهای ورودی و خروجی از دادههای مسیر مشخص میشوند و شماره آنها از بالا سمت چپ شروع میشود و در خلاف جهت عقربههای ساعت حرکت میکند.
4.4.2. مدل های فرعی
دو مدل فرعی خاص وجود دارد که بحث را تضمین می کند، به ویژه روشی که در آن گرادیان ها بر اساس داده های منبع تولید می شوند و روشی که عوامل برنامه ریزی و انجام حرکت خود را انجام می دهند.
تولید گرادیان
در زمینه این مقاله، ما به یک گرادیان به عنوان نشان دهنده هزینه به نوعی، مرتبط با هر جفت ورودی-خروجی اشاره می کنیم. چنین شیب هایی معمولاً در مدل های عابر پیاده استفاده می شود. برای مثال [ 13 ، 18 ، 72 ] را ببینید. ما انتخاب کردیم که جفت ورودی-خروجی را به جای خروجی ها در نظر بگیریم زیرا ورودی ها به معنای معنایی صحنه خاصی کمک می کنند. به عنوان مثال، شخصی که از در 1 وارد صحنه می شود و دیگری از درب 2 همسایه وارد صحنه می شود ( شکل 4)، ممکن است از قسمتهای مختلف ساختمان وارد شوند، و به همین دلیل ممکن است مقاصد متفاوتی داشته باشند و بنابراین خروجیهای متفاوتی را انتخاب کنند، حتی اگر آنها موقتاً از نظر مکانی نزدیک باشند. دو نوع گرادیان در این تحقیق آزمایش شد، بهویژه یکی که صرفاً بر اساس فواصل اقلیدسی حاصل از مکانهای ورودی و خروجی (شیبهای مبتنی بر فاصله) محاسبه شد و دومی که از فعالیت صحنه (شیابهای مبتنی بر فعالیت)، به دست آمد. شکل 5. برای هر دو نوع گرادیان، رابطه همسایگی مور در محاسبات استفاده شد. برای شیب های مبتنی بر فاصله، به نقاط خروج هزینه صفر اختصاص داده می شود، با هر مکان مجاور نقاط خروجی دارای فاصله صفر بعلاوه یک. سلولهای همسایه بیشتر که از این مکانهای برچسبگذاری شده اصلی خارج میشوند، با هزینه سلول برچسبگذاری شده به همراه هزینه انتقال از آن سلول به سلول همسایه مرتبط میشوند. در این محاسبات انتقال از یک سلول به یک سلول همسایه به یک سلول اختصاص داده می شود. میتوان این مسیر را سادهترین کوتاهترین مسیر در نظر گرفت که میتوان آن را با Dijkstra’s [ 81 ] محاسبه کرد] الگوریتم گرادیان های مبتنی بر فاصله همچنین اطلاعاتی را در مورد وجود موانع در خود جای می دهند، زیرا به موانع هزینه بی نهایت اختصاص داده می شود (مثلاً مقدار زیادی) که این سلول ها را به طور موثر غیرقابل عبور می کند.
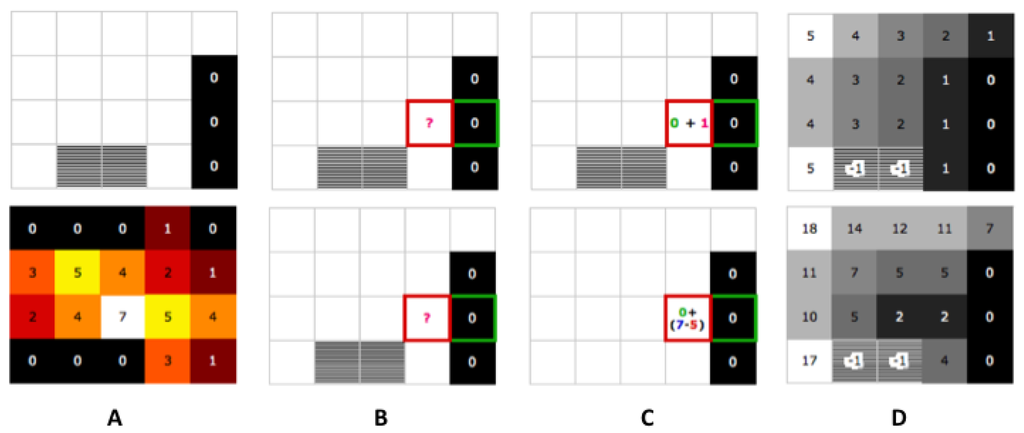
شکل 5. ساخت گرادیان برای فضاهای اطلاعاتی مبتنی بر فاصله ( بالا ) و نقشه حرارتی مبتنی بر فعالیت ( پایین ).
گرادیان های مبتنی بر فعالیت به روشی مشابه تولید می شوند، با این تفاوت اساسی که هزینه جابجایی بین سلول ها با مقادیر نقشه حرارتی مربوطه مرتبط است، همانطور که از داده های دوربین مداربسته ترسیم شده است. نقشه حرارتی تنها با گرفتن مسیرهای عواملی که بین ورودی و خروجی معین حرکت می کنند و شمارش تعداد دفعاتی که هر مکان در داده ها پیموده شده است، ایجاد می شود. بر اساس نقشه حرارتی حاصل، گرادیان های مبتنی بر فعالیت به صورت زیر محاسبه می شوند. برای هر جفت ورودی و خروجی، حداکثر مقدار سلول نقشه حرارتی پیدا می شود و برای محاسبه تفاوت از سایر سلول های نقشه حرارتی استفاده می شود. سپس آن مقدار به عنوان گرادیان مبتنی بر فعالیت برای سلول مربوطه اختصاص داده می شود. می توان این را بسط مفهوم پیدایش مسیرها در نظر گرفت،82 ] که نشان داد از طریق تجربه یک فضای خاص، افراد مخزنی از مبداها و مقاصد و مسیرهایی را می سازند که آنها را به هم متصل می کند که لازم نیست کوتاه ترین مسیر باشد [ 83 ].
این دو رویکرد در شکل 5 نشان داده شده است، که در آن ردیف بالا فرآیند محاسبه گرادیان های مبتنی بر فاصله را نشان می دهد و ردیف پایین روند تولید گرادیان های مبتنی بر فعالیت را نشان می دهد. در این شکل ما چهار مرحله در فرآیند محاسبات را نشان میدهیم، از مرحله A (آغازسازی) تا مرحله D (شیب نهایی). در ردیف بالا (شیب های مبتنی بر فاصله)، تنظیمات اتاق را با نقاط خروجی با هزینه 0 و موانع موجود در اتاق نشان داده شده می بینیم (مرحله A). در مرحله B، نقاط مجاور نقاط خروجی را بررسی می کنیم. در مرحله C با شروع از نقاط خروجی، هزینه حرکت از نقطه خروجی به نقطه همسایه را در نظر می گیریم. این روند کاوش سلول های همسایه ادامه دارد و مرحله D گرادیان نهایی را نشان می دهد. در ردیف پایین، فرآیند کشف یکسان است،
شکل 6. نمودار الگوریتم برنامه ریزی مسیر.
جنبش برنامه ریزی
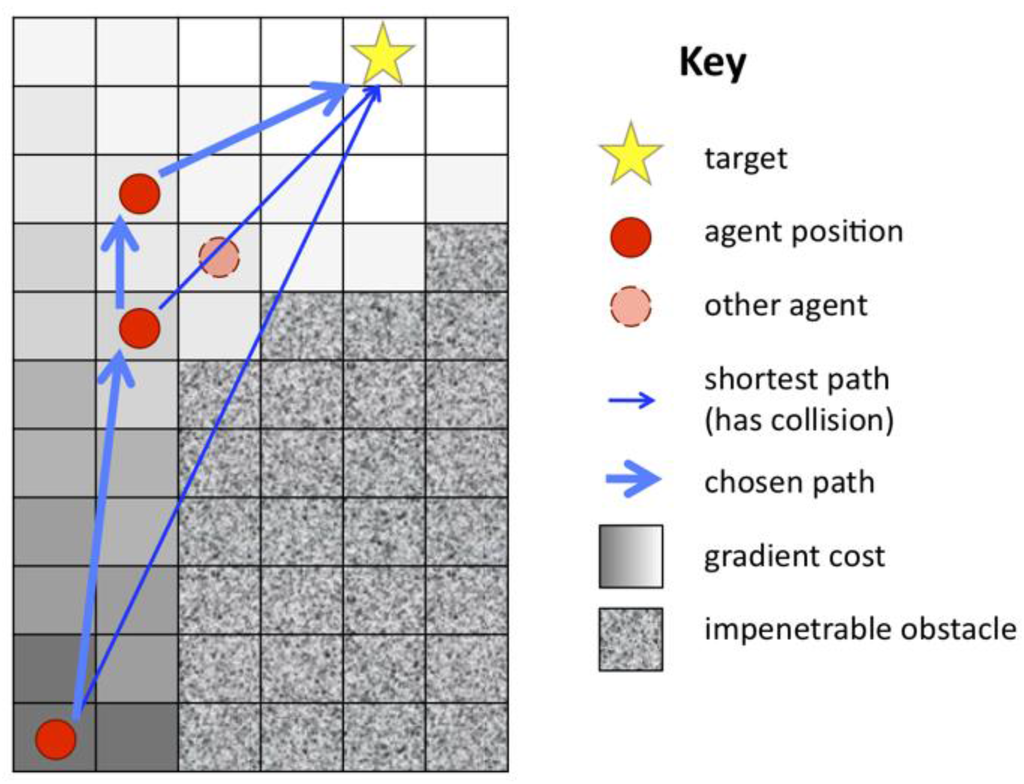
در حالی که بسیاری از روشهای ناوبری، از جمله نمودارهای دید و نقشههای راه تطبیقی ممکن است (به [ 3 ، 68 مراجعه کنید]] برای بررسی)، ما در حال تلاش برای ایجاد ساده ترین مدل ممکن هستیم که بتواند الگوهای واقعی حرکت عابر پیاده را تولید کند. برای انجام این کار، هر بار که یک عامل برای حرکت فراخوانده میشود، تعدادی بررسی انجام میدهد، به طور بالقوه یک هدف میانی جدید را از میان مجموعه سلولهایی انتخاب میکند که به لحاظ نظری میتواند در مرحله زمانی به آن برسد، و سپس به سمت آن میانی حرکت میکند. با حداکثر سرعت ممکن هدف قرار دهید. بررسیهایی که میتواند باعث ارزیابی مجدد هدف میانی عامل شود، شامل این است که آیا عامل به نقطه هدف میانی فعلی خود رسیده است، آیا آن نقطه هم نزدیک است و هم در حال حاضر اشغال شده است، آیا عامل از لحاظ فنی در حال حرکت به سمت شیب در نزدیک شدن به نقطه است یا خیر. عامل فاقد یک خط دید واضح است. شکل 6این فرآیند را ترسیم می کند. اگر هر یک از این موارد وجود داشته باشد، عامل تا حد دید خود حداقل نقطه گرادیان اشغال نشده را جستجو می کند و نقاطی را که خط دید ندارند را دور می زند. این نقطه به عنوان نقطه هدف میانی جدید در نظر گرفته می شود. با توجه به یک نقطه هدف میانی، عامل عنوان ایده آل خود را تعیین می کند. عامل به سلول موجود با بزرگترین محصول نقطه با عنوان حرکت می کند و در صورت وجود چندین مکان، سلولی را با کمترین مقدار گرادیان انتخاب می کند.
5. آزمایشات
مطابق با عمل ABM، مدل ساخته شده با توجه به سازگاری منطقی آن تأیید شد تا اطمینان حاصل شود که هیچ خطای منطقی در ترجمه مدل به کد وجود ندارد و یا هیچ گونه خطای برنامهنویسی وجود ندارد. این راستیآزمایی از طریق مرور کد، پروفایلسازی و آزمایش پارامتر انجام شد. این اطمینان حاصل کرد که مدل همانطور که در نظر گرفته شده بود رفتار می کند و با طراحی آن مطابقت دارد.
ارزیابی عملکرد یک ABM شامل دو وظیفه است که در متن این مقاله به دقت و دقت اشاره خواهیم کرد. دقت ABM به میزان تطابق خروجی آن با داده هایی که برای کالیبره کردن آن استفاده شده است، اشاره دارد. ذاتاً یک ABM یک انتزاع از مجموعه داده اصلی را نشان می دهد، و بنابراین سؤالی که مطرح می شود این است که خروجی این انتزاع چقدر با مجموعه داده کامل مطابقت دارد؟ با توجه به دقت آن، چالش ارزیابی درجه ای است که چنین مدلی می تواند رویدادهای واقعی را پیش بینی کند که هیچ داده ای برای آنها وجود ندارد (به عنوان مثال، پر کردن شکاف در خوراک داده ما، یا پیش بینی یک رویداد آینده). به منظور ارزیابی عملکرد رویکرد SA 2 -ABM خود، آزمایشهایی را ارائه میکنیم که به این معیارها میپردازندبخش 5.1 (دقت) و بخش 5.2 (دقت). در اینجا باید توجه داشت که ارزیابی ما در سطح کل صحنه انجام میشود: ما نقشههای حرارتی مشتقشده از شبیهسازی را با نقشهای که مجموعه داده ورودی را منعکس میکند، مقایسه میکنیم تا بتوانیم مدل ما را به خوبی الگوهای جریان ترافیک را در طول زمان در صحنه شبیهسازی کنیم. اگر کسی علاقه مند به ارزیابی مسیرهای خاص در داخل صحنه بود، میتوانست از معیارهای مقایسه مسیر استفاده کند، بهعنوان مثال، از رویکردهای ساده مبتنی بر فاصله (مانند هاسدورف از مدلهای پنهان مارکوف)، یا اقدامات تشابه پیچیدهتر مانند طولانیترین دنباله مشترک (LCSS) استفاده کند. ، [ 84 ]) و فاصله زمانی پویا (DTW)، به جز چند مورد. ژانگ و همکاران [ 85 ] و موریس و تریودی [86 ] مطالعات تطبیقی تکنیک های مقایسه مسیر محبوب را ارائه کرده اند. با این حال، چنین مقایسه مسیر به مسیر خارج از محدوده این مقاله است و در اینجا به آن پرداخته نمی شود.
5.1. ارزیابی دقیق: تست سناریو
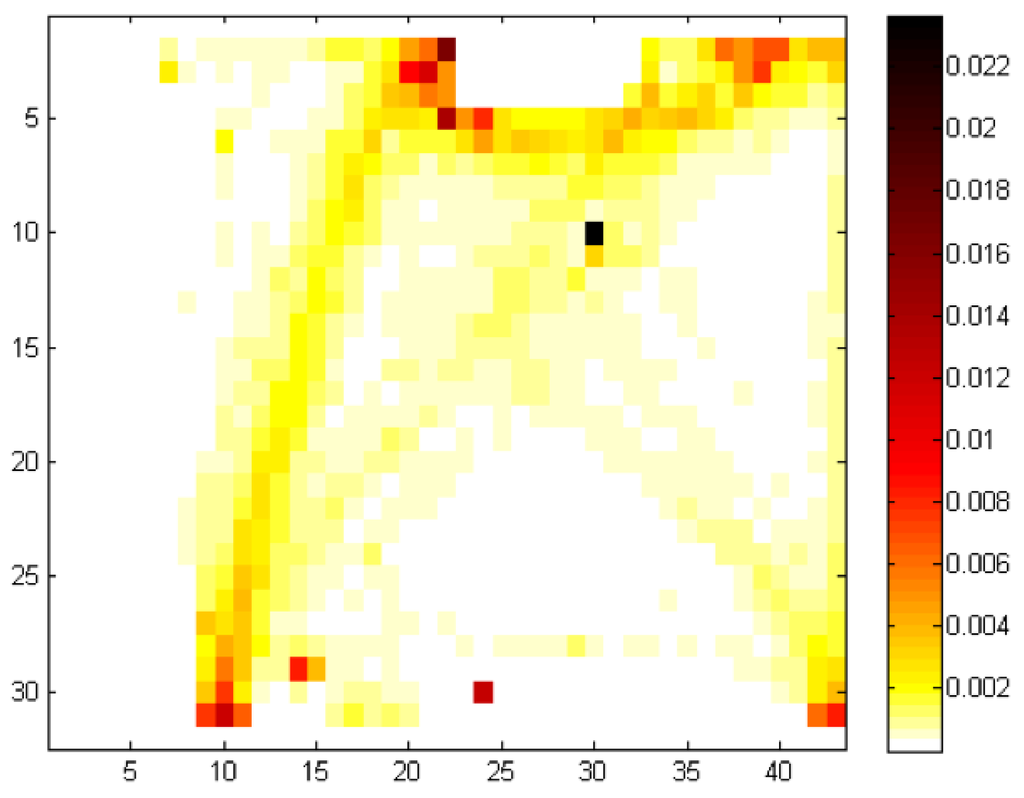
شکل 7 نقشه حرارتی نرمال شده واقعی را نشان می دهد که توسط داده های ترافیک پیاده جمع آوری شده طی 15 ساعت (کل روز) در 25 آگوست ایجاد شده است. این به عنوان مرجع ما عمل می کند، یعنی مجموعه داده به اصطلاح “حقیقت زمین”. در مطالعات خود، تمام نتایج شبیهسازی خود را با این نقشه حرارتی مرجع مقایسه میکنیم تا ارزیابی کنیم که ABM چقدر خوب عمل میکند. در طول آن روز با توجه به دقت آن، ما شبیهسازیهایی را در همان بازه زمانی ۱۵ ساعته در فواصل یک ثانیه ایجاد کردیم. در هر سناریو، مدل 30 بار اجرا شد و ما میانگین نقشههای حرارتی شبیهسازی شده حاصل را با نمونه مرجع مقایسه کردیم تا دقت مدل را ارزیابی کنیم.
شکل 7. یک نقشه حرارتی نرمال شده برای 25 آگوست، همانطور که از داده های مسیر برای آن تاریخ به دست آمده است.
دادههای خاص صحنه را میتوان برای کالیبره کردن ABM استفاده کرد و به آن دانش درباره ویژگیهای صحنه داده شده القا کرد. به منظور ارزیابی اثرات انواع مختلف دادههای کالیبراسیون بر دقت ABM، ما چهار سناریو مختلف را انتخاب کردهایم که بر اساس یکدیگر ساخته شدهاند و در زیر به تفصیل شرح داده شدهاند:
-
سناریوی 1: بدون اطلاعات واقعی در مورد احتمالات ورودی/خروجی یا نقشه های حرارتی
-
سناریوی 2: احتمالات واقعی ورود/خروج اما نقشه های حرارتی غیرفعال
-
سناریوی 3: نقشه های حرارتی واقعی اما احتمالات ورودی/خروجی غیرفعال است
-
سناریوی 4: احتمالات واقعی ورود/خروج و نقشه های حرارتی فعال شده است
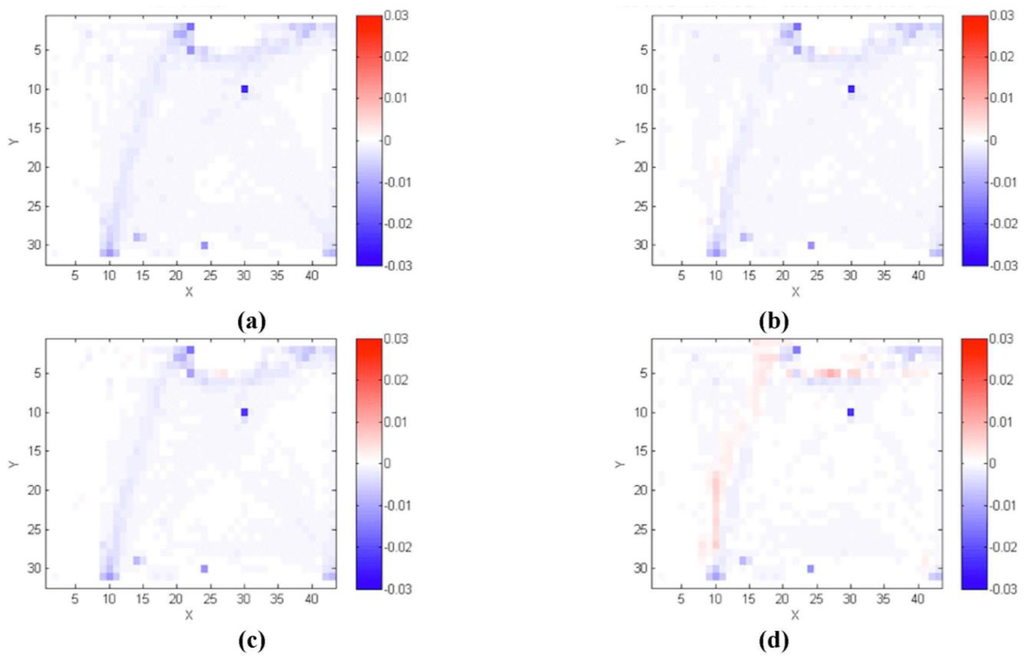
شکل 8. نقشه های حرارتی نرمال شده در مقایسه یک سناریوی شبیه سازی خاص با داده های واقعی. ( الف ) سناریو 1: اطلاعات واقعی در مورد ورودی ها، خروجی ها یا نقشه های حرارتی وجود ندارد. ( ب ) سناریوی 2: احتمالات واقعی ورودی/خروجی اما نقشه های حرارتی غیرفعال شده است. ( ج ) سناریوی 3: نقشه های حرارتی واقعی اما احتمالات ورودی/خروجی غیرفعال است. ( د ) سناریوی 4: احتمالات واقعی ورود/خروج و نقشه های حرارتی فعال شده است.
شکل 8 مقایسه ای از چهار سناریو را با سناریوهای ایجاد شده توسط مسیرهای واقعی عابر پیاده نشان می دهد (برای مقایسه داده های واقعی و داده های شبیه سازی شده، ما تمام 30 اجرا را از هر یک از سناریوها برداشتیم و سپس مقدار مصرف هر سلول را خلاصه کرده و آنها را تقسیم کردیم. این نقشه حرارتی نرمال شده سپس با نقشه حرارتی نرمال شده داده های واقعی مقایسه شد. نوار مقیاس برای همه سناریوهای شکل 8از قرمز به آبی تبدیل میشود، قرمز تیرهتر نشاندهنده پیشبینی بیشازحد و آبی تیرهتر نشاندهنده پیشبینی کم است. سفید تطابق کامل مدل با داده ها را نشان می دهد. حتی آزمایش ساده (سناریو 1) پدیده های نوظهور ساده را نشان می دهد زیرا عوامل با محیط خود و یکدیگر تعامل دارند تا مسیرها را در طول زمان توسعه دهند. آنچه از این سناریو مشخص است این است که بدون هیچ اطلاعات دیگری، ABM ترافیک واقعی را کمتر پیش بینی می کند. این در شکل 9 مشهود است که تفاوت بین پیشبینی بیش از حد و کم پیشبینی را در هر یک از سناریوها نشان میدهد که در آن محور Y گزارش تعداد پیکسلهایی است که دارای یک مقدار خطای معین از مقایسه نقشه حرارتی هستند.
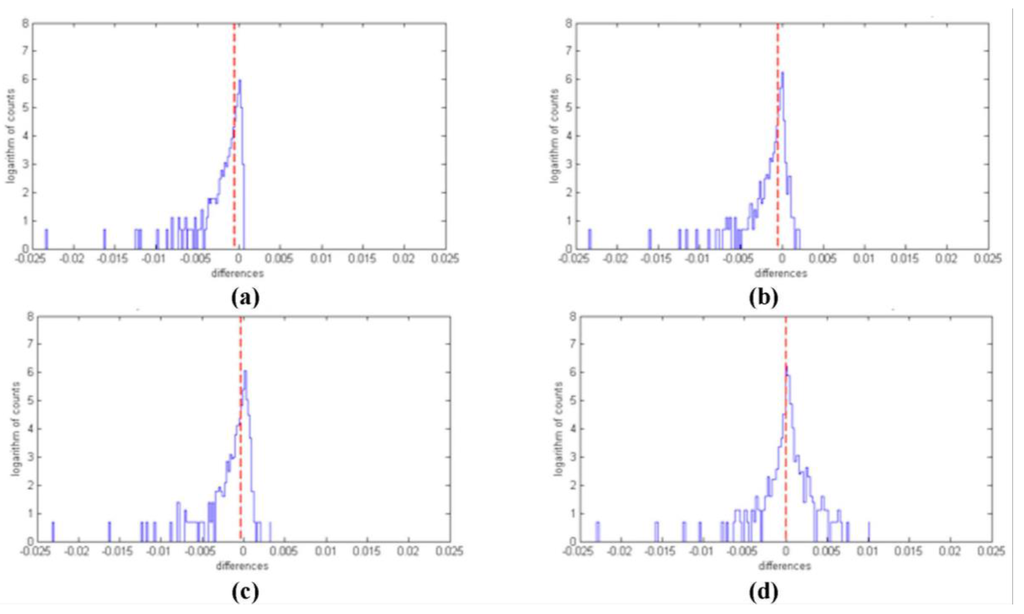
شکل 9. نمودارهای میله ای یک سناریوی شبیه سازی خاص که تفاوت بین خروجی متوسط شبیه سازی و داده های واقعی را مقایسه می کند. ( الف ) سناریو 1: اطلاعات واقعی در مورد ورودی ها، خروجی ها یا نقشه های حرارتی وجود ندارد. ( ب ) سناریوی 2: احتمالات واقعی ورودی/خروجی اما نقشه های حرارتی غیرفعال شده است. ( ج ) سناریوی 3: نقشه های حرارتی واقعی اما احتمالات ورودی/خروجی غیرفعال است. ( د ) سناریوی 4: احتمالات واقعی ورود/خروج و نقشه های حرارتی فعال شده است.
جدول 3 آمار خلاصه برای خطاهای هر سناریو را نشان می دهد (علاوه بر این آزمون ما همچنین دریافتیم که انواع محله های مختلف (مانند مور، فون نویمان، همیلتونین) تفاوت کمی در نتیجه شبیه سازی دارند). در اینجا ما خطا را به عنوان نتایج شبیه سازی منهای نقشه حرارت واقعی تعریف می کنیم. در حالی که در تمام سناریوها انحراف معیار خطا و حداکثر اختلاف مطلق تقریباً یکسان باقی میماند، این در مورد خطای میانگین و چولگی صدق نمیکند، که در سناریوی 4 به میزان قابلتوجهی کاهش مییابد. برای مثال، میانگین خطا یک مرتبه کاهش مییابد. قدر، از -0.000533 در سناریوی 1 تا 0.000062 در سناریوی 4 در حالی که چولگی به طور مشابه از -7.17441 به -4.72599 کاهش می یابد. از بررسی سناریوهای دیگر می توان دریافت که با افزودن اطلاعات بیشتر به SA 2-ABM مدل شروع به تطبیق بیشتر با حقیقت زمین می کند و بنابراین دقت SA 2 -ABM در حال بهبود است.
با پیشروی از سناریوی 1 به 4، یک مقدار میانگین خطای کوچکتر نشان دهنده کاهش سوگیری است. همانطور که از نتایج مشاهده می شود، بدون ترکیب اطلاعات ورودی و خروجی و نقشه های حرارتی، مدل هنوز مسیرهای بین ورودی و خروجی را پیش بینی نمی کند. این را می توان با این واقعیت توضیح داد که بدون انتخاب واقع بینانه ورودی-خروجی، مردم کمتر در مسیرهایی که به طور عینی بیشتر سفر می شوند و بیشتر در مسیرهای کم پیموده شده قدم می زنند و آمار کلی استفاده را هموار می کند. بدون هیچ گونه اطلاعات خاص صحنه، ABM از عابران پیاده خود می خواهد که صحنه را طی کوتاه ترین مسیری که ورودی و خروجی را به هم متصل می کند، طی کنند، در نتیجه تعداد کل مراحل صحنه در مقایسه با واقعیت کمتر است، رنگ های آبی غالب در شکل. 8a–c. با این حال، هنگام ترکیب اطلاعات خاص صحنه، می توان دید که چگونه مدل از این سوگیری جلوگیری می کند و خطاهای متعادلی ایجاد می کند، و این را می توان با برنامه ریزی مسیر ABM توضیح داد. در همه سناریوها، ما در بسیاری از مکانهای مشابه (مانند X30، Y10 و X24، Y30 و X10 Y32 و X14 Y29 در شکل 8 ) کمتر پیشبینی میکنیم. با نگاهی به اطلاعات فعالیت صحنه، این مناطق بیشترین ترافیک را دارند (همانطور که در شکل 7 نشان داده شده است)، اما همچنین مناطق ورودی و خروجی را علامت گذاری کنید. این به نحوه ضبط اطلاعات صحنه مربوط می شود. افراد در هر ثانیه که در محیط هستند ضبط می شوند، به طوری که اگر مکث کنند یا با فردی در یک مکان خاص ملاقات کنند، وزن آن سلول افزایش می یابد. در ABM، عوامل فقط رفتار ساده ای دارند تا در سریع ترین زمان ممکن در صحنه حرکت کنند و از موانع اجتناب کنند. بحثی که ما در اینجا مطرح می کنیم این است که این نشان می دهد که برخی از دینامیک های خوبی در ورود و خروج از فضا وجود دارد (مانند تکان دادن درب) که ویدیو می گیرد اما SA 2 -ABM این کار را نمی کند. این رفتار / کشف نقطه ای برای کار بیشتر خواهد بود.
جدول 3. آمار خلاصه از سناریوهای مختلف.
با این وجود، سناریوهای بالا نشان دادهاند که چگونه میتوانیم با مدل خود اعتباری به دست آوریم، یعنی جایی که میتوانیم خروجی از تعاملات فردی را مقایسه کنیم و آن را با دادههای جمعآوریشده از دنیای واقعی مقایسه کنیم. به یک معنا می توان این سناریوها را به عنوان روشی برای کالیبراسیون در نظر گرفت که مدل را به یک مجموعه داده خاص تنظیم می کند. با این حال، این کالیبره کردن پارامترهای عامل خاص (مانند قوانین حرکت، سرعت راه رفتن و غیره ) نیست، بلکه به عوامل اطلاعات بیشتری میدهد تا تصمیمات مسیریابی خود را اتخاذ کنند.
5.2. ارزیابی دقت: پیش بینی فعالیت
یک هدف اساسی از مدلسازی مبتنی بر عامل (و به طور کلی مدلسازی) توانایی پیشبینی فعالیتها به منظور اجرای سناریوهای چه میشود است. در اینجا ما دو سناریو از این قبیل را اجرا می کنیم، به ویژه “چقدر می توانیم داده های از دست رفته را شبیه سازی کنیم؟” و «آیا میتوانیم تأثیر موانع اضافه در الگوهای حرکت در صحنه را پیشبینی کنیم؟» با توجه به در دسترس بودن داده ها، سناریوی اول به عنوان ارزیابی دقت مدل عمل می کند (همانطور که در ادامه این بخش خواهیم دید، داده های شبیه سازی شده را با اطلاعات واقعی مقایسه خواهیم کرد)، در حالی که سناریوی دوم به عنوان نمایشی از پتانسیل مدل
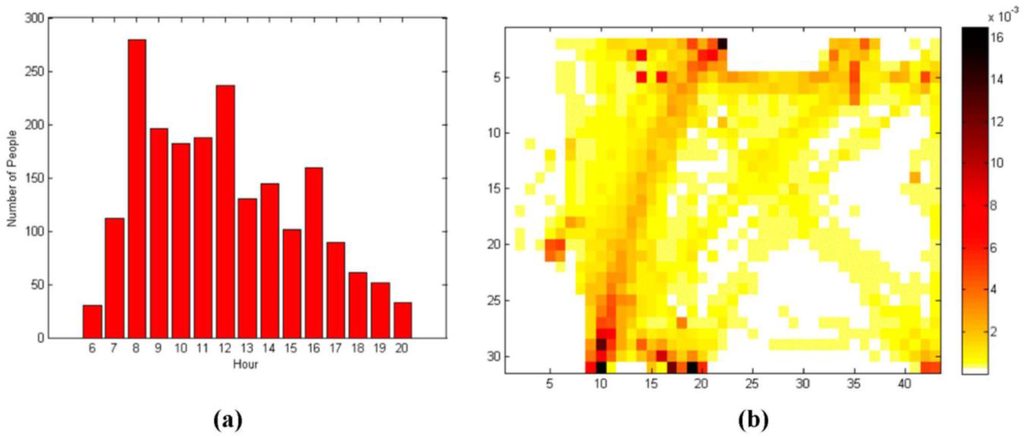
با توجه به مثال اول، چالش عملی که ما به آن می پردازیم این است که اگر سیستم دچار قطع برق شد و به مدت یک ساعت از کار افتاد ، چقدر می توانیم یک فعالیت صحنه را با SA 2 -ABM خود بازسازی کنیم. به منظور بررسی چگونگی برون یابی الگوهای حرکتی از داده های محدود، با حذف تمام داده های ثبت شده بین ساعت 8 صبح تا 9 صبح، که یکی از ساعات پرترافیک است، از رکورد 25 آگوست، شکاف داده های مصنوعی ایجاد کردیم. این مجموعه از نقاط در شکل 10 نشان داده شده استa، و حذف آنها به طور موثری از نقص سنسور تقلید می کند. با ساختن نقشههای حرارتی و توزیعهای احتمال ورود/خروج از این مجموعه داده محدود، تلاش کردیم تا پیشبینی واقعبینانهای از آنچه که ساعت از دست رفته داده ممکن است شبیه به آن باشد را بازسازی کنیم. در شکل 10b ما نقشه حرارتی واقعی را بین ساعت 8 صبح تا 9 صبح نشان میدهیم که در آزمایش استفاده نشد، اما بعداً به عنوان یک مجموعه داده مرجع برای ارزیابی دقت نتایج شبیهسازی مورد استفاده قرار گرفت. ما از نقشه حرارتی تولید شده در طول روز، به استثنای اطلاعات جمع آوری شده بین ساعت 8 و 9 صبح، به عنوان نقشه گرمایی خود برای هدایت حرکت عامل استفاده می کنیم. سپس دو آزمایش انجام دادیم، یکی که در آن تعداد عوامل بین 8 صبح تا 9 صبح مشخص است (اما احتمال ورود و خروج آنها مشخص نیست) و دومی که در آن عوامل به طور تصادفی تولید می شدند (یعنی عوامل بر اساس توزیع های استخراج شده از باقی روز). شکل 11نتایج ما را با الگوهای استفاده واقعی در طول ساعت از دست رفته مقایسه می کند. موفقیت ما در پیشبینی جریان عمومی ترافیک بهویژه با توجه به این واقعیت جالب است که الگوهای استفاده میتواند در طول روز متفاوت باشد، عجله صبحگاهی ویژگیهای متفاوتی را نسبت به جمعیت ناهار نشان میدهد یا سرازیر شدن سرایداران در دورههای آرامتر روز. علیرغم این واقعیت که ما داده های شلوغ ترین دوره روز را از مدل خارج کردیم، پیش بینی های ما از الگوهای استفاده به خوبی با واقعیت مطابقت دارد، همانطور که در آمار خلاصه جدول 4 نشان داده شده است.
شکل 10. اطلاعات صحنه ( الف ) توزیع افراد در صحنه در طول زمان. ( ب ) نقشه گرمای واقعی ترافیک از ساعت 8 صبح تا 9 صبح
در سناریوی دوم، ما از مدلی که ساختهایم استفاده میکنیم تا نحوه واکنش عابران پیاده به شرایط جدید را نشان دهیم. به طور خاص، ما از این مدل برای پیشبینی نحوه واکنش عوامل در مواجهه با یک محیط در حال تغییر استفاده میکنیم، همانطور که ممکن است زمانی که یک مانع بزرگ (به عنوان مثال، یک اثر هنری یا مبلمان) به ابعاد 2 متر در 2 متر در وسط نصب شده باشد، استفاده میکنیم. یک مسیر اصلی (مکان X = 13 Y = 15). با اصلاح لایه ای که موانع ثابت در محیط را نشان می دهد، وضعیتی را معرفی کردیم که در آن افراد مجبور بودند اجتناب از عناصر محیط را با الگوهای عادی حرکت همانطور که در شکل 12 نشان داده شده است متعادل کنند.آ. علاوه بر این، ما همچنین عملکرد مدل را در شرایط ترافیکی سنگین ارزیابی میکنیم، در این سناریو وضعیتی با 30 عابر پیاده در هر زمان در صحنه ایجاد کردیم (میتوانستیم عابران پیاده بیشتری را در صحنه اضافه کنیم اما در تعداد بیشتری مانند 60 نفر. عوامل در صحنه در هر زمان منجر به ایجاد گلوگاه در اطراف خروجی ها ( یعنی درها) می شود. احتمال انتخاب ورودی و خروجی بدون تغییر است: عابران پیاده فقط به دفعات بیشتر به شبیه سازی اضافه می شوند. این باعث می شود این فرض وجود داشته باشد که تعداد عابران پیاده که از فضا استفاده می کنند بدون اینکه الگوهای انتخاب درب آنها تغییر کند، افزایش می یابد.
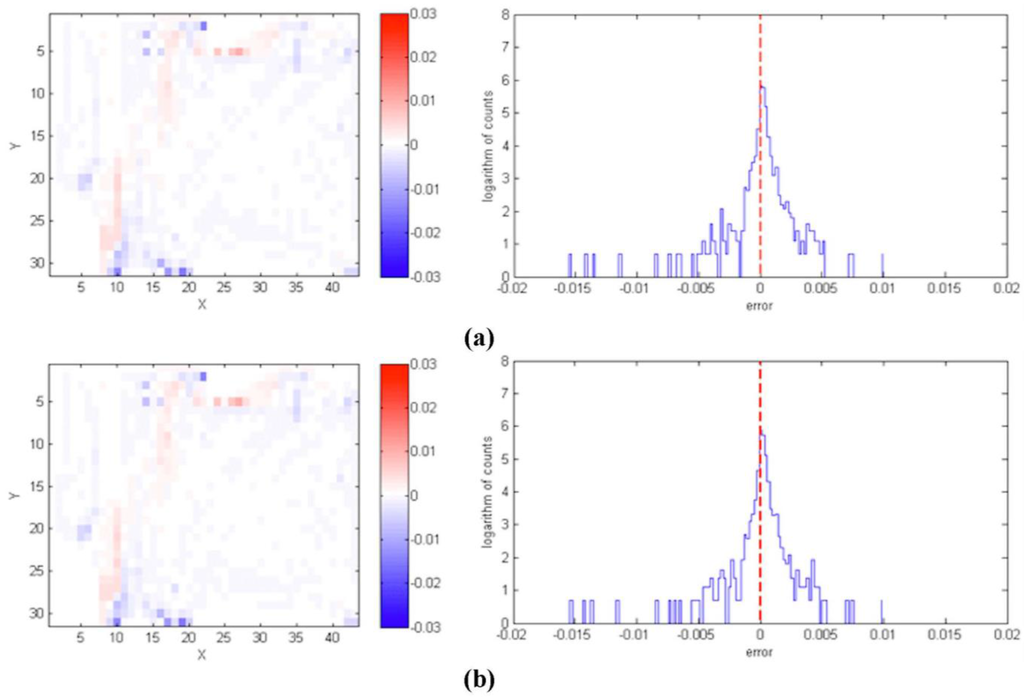
شکل 11. مقایسه دو آزمایش با داده های واقعی. ( الف ) عوامل ایجاد شده از شمارش واقعی بین ساعت 8 صبح تا 9 صبح؛ ( ب ) عوامل تولید شده از داده ها برای بقیه روز.
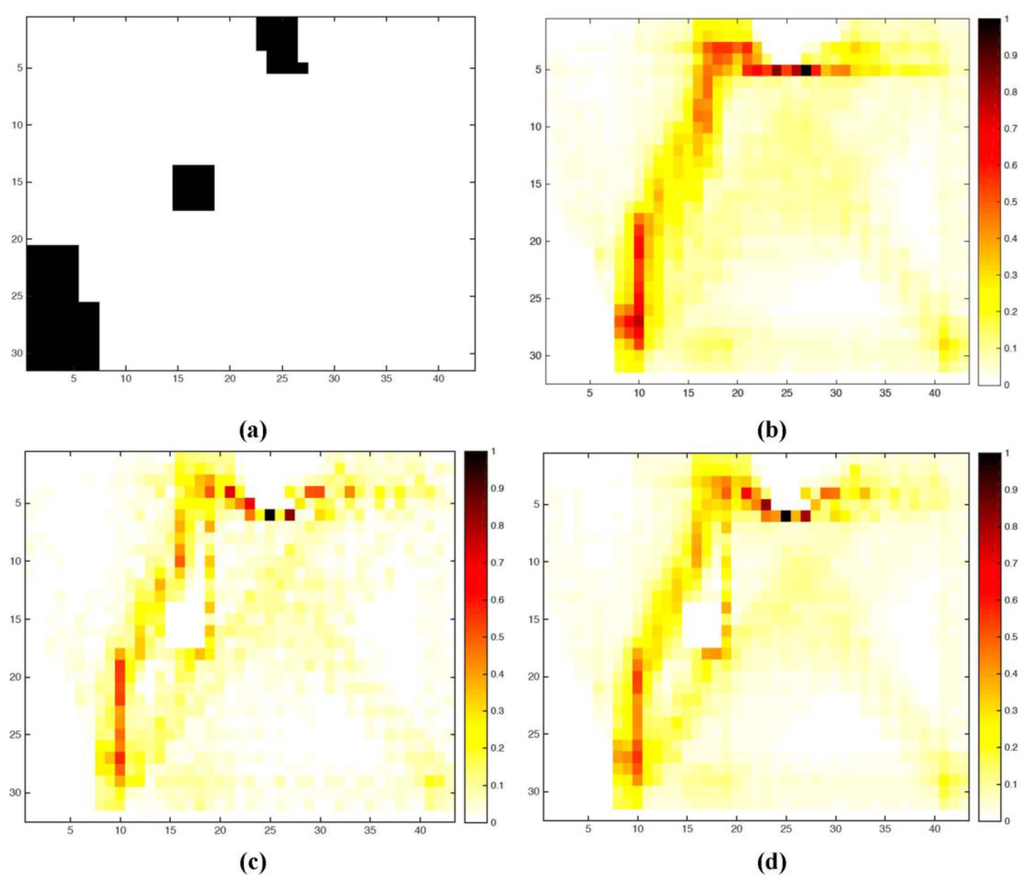
شکل 12 ب نتایج تنها افزایش تعداد عابران پیاده در صحنه را بدون موانع اضافی نشان می دهد. این شبیه به شکل 7 و شکل 8 است که نشان می دهد مدل می تواند ترافیک بیشتری را مدیریت کند. معرفی موانع به مشاهدات جالب تری منجر می شود. شکل 12 c,d نقشه های حرارتی حاصل را نشان می دهد زیرا عوامل در حال اجتناب از این مانع تازه معرفی شده هستند. شکل 12 c نتایج یک وضعیت ترافیک متوسط را نشان می دهد (همان تنظیمات در بخش 5.1 )، در حالی که شکل 12 d نتایج حجم بالای ترافیک را نشان می دهد. در هر سه مورد ( شکل 12b–d)، عوامل با احتمالات ورودی و خروجی واقعی مقداردهی اولیه می شوند و همچنین توسط نقشه های حرارتی متعارف مطلع می شوند. با افزودن عابران پیاده اضافی به صحنه، فضای بیشتری مورد استفاده قرار گرفت ( یعنی 91 سلول بیشتر (6.6٪) عبور کرد، که قابل انتظار است، زیرا عوامل نه تنها باید در اطراف مانع بلکه در اطراف یکدیگر نیز حرکت کنند. اگر موقعیتی را که در آن هیچ مانعی به صحنه اضافه نشده است ( شکل 12 ب) و مانعی با مانع مقایسه کنیم، مانع 20 سلول دیگر (1.5٪) عبور کرده است.
جدول 4. آمار خلاصه از دو آزمایش مختلف.
شکل 12. ( الف ) موانع (مربع سیاه) اضافه شده به صحنه. ( ب ) نقشه گرمایی افزایش ترافیک بدون مانع. نقشه های حرارتی نرمال شده برای حجم کم ( c ) و زیاد ( d ) ترافیک عابر پیاده پس از معرفی مانع برای 25 آگوست.
با نداشتن دادههای واقعی برای تأیید این مسیرها، نمیتوان کمیت کرد که مدل ما چقدر مسیرهای واقعی را پیشبینی میکند. با این حال، الگوهای حرکتی واقع گرایانه و معقول به نظر می رسند به این معنا که عوامل مسیرهای مختلفی را در اطراف موانع طی می کنند و الگوهای حرکت را از آزمایش های قبلی تقلید می کنند. به عبارت Mandelbrot [ 87 ] مدلهایی که پیشبینیهای فضایی یا فیزیکی را تولید میکنند که میتوانند نقشهبرداری یا تجسم شوند، باید «درست به نظر برسند». مدل ما با این ارزیابی کیفی مطابقت دارد. این نشان می دهد که این روش می تواند به برنامه ریزان کمک کند تا به سرعت پارامترهای حرکت عادی را در فضا محاسبه کنند. این یکی از دلایل استفاده از مدلهای مبتنی بر عامل است: در مناطقی که دادهها کم، غایب یا دست نیافتنی هستند، میتوانیم آزمایش کنیم.اگر سناریوها زمانی که به ساختار و پویایی مدل اصلی اعتماد داشته باشیم چه می شود.
6. چشم انداز
همانطور که در مقدمه مورد بحث قرار گرفت، ABM های عابر پیاده سنتی بر روی مجموعه داده های واقعی پایه گذاری نشده اند. این بازتابی از چالش ترکیبی جمع آوری و تجزیه و تحلیل مقادیر زیادی از این داده ها بوده است. از آنجایی که دادههای مسیر بزرگ در دسترس جامعه ما هستند، اکنون در موقعیتی قرار داریم که میتوانیم از چنین اطلاعاتی برای ساخت مدلهای عابر پیاده دقیقتر و دقیقتر از لحاظ جغرافیایی صریح استفاده کنیم. در این مقاله ما رویکردی را برای استفاده از اطلاعات تحرک صحنه واقعی برای بهبود عملکرد و دقت یک ABM عابر پیاده، تولید یک ABM آگاه از صحنه و فعالیت ( SA 2 -ABM) معرفی کردیم.). ما این را به عنوان یک گام اساسی در جهت پل زدن بیشتر شکاف فعلی بین مدلسازی مبتنی بر عامل و جوامع ژئوانفورماتیک میدانیم.
به طور خاص، ما نشان دادهایم که هنگام استفاده از یک ABM استاندارد بدون هیچ گونه اطلاعات صحنه، عملکرد مدل ممکن است به طور قابلتوجهی متفاوت باشد، که کاربرد آن را برای تحلیل و پیشبینی محدود میکند. این مشکل با افزودن اطلاعات صحنه، و به طور خاص با استفاده از احتمالات ورودی و خروجی، و/یا خلاصهسازی فعالیت در قالب نقشههای حرارتی آن صحنه برطرف میشود. در حالی که هر بخش از اطلاعات به تنهایی ABM اولیه را بهبود می بخشد، این ترکیب آنها بود که آن را بیشتر بهبود بخشید. بهبود را می توان به عنوان کاهش میانگین خطا و چولگی در نظر گرفت. به بیان ساده، شبیه سازی SA 2 -ABM تقریب بهتری از واقعیت نسبت به یک ABM ساده فاقد اطلاعات صحنه است.
رویکرد پیشنهادی از گسترش فناوریهای نظارت تصویری با جمعآوری اطلاعات فعالیت از مسیرهای مشتقشده از ویدئو و استفاده از آن برای اطلاعرسانی به یک ABM برای صحنه تصویر شده بهره میبرد. با انجام این کار، دانش اساسی و غیر پیش پاافتاده ای در مورد صحنه به تصویر کشیده شده به دست می آوریم، برای مثال الگوهای مهم فعالیت را تشخیص می دهیم، و درک بیشتری در مورد نحوه استفاده انسان از صحنه در زندگی روزمره به دست می آوریم. این به ما اجازه می دهد تا فراتر از کاوش ساده هندسه صحنه ( یعنی فرم صحنه) حرکت کنیم و عملکرد صحنه را همانطور که از طریق الگوهای حرکت در آن صحنه منعکس می شود در نظر بگیریم.
این کار همچنین می تواند در آینده برای پشتیبانی فعال از نظارت تصویری، به جای تغذیه صرف از نتایج آن، گسترش یابد. اولاً، مدلهای فعالیتی که برای یک منطقه از طریق رویکردی که در این مقاله توضیح دادیم ایجاد میشوند، میتوانند برای برونیابی فعالیتهای انسانی برای مناطق شکاف بین میدانهای دید همسایه استفاده شوند. بنابراین، حرکت فردی که در یک دوربین به عنوان بخشی از سیستم فیدهای ویدیویی غیرهمپوشانی ردیابی میشود را میتوان با استفاده از SA 2 -ABM مربوطه برای پیشبینی اینکه آن شخص به کجا میرود و تخمین دوربینی که در آن خواهد بود تعبیر کرد. ظاهر شدن بعدی
علاوه بر این، SA 2 -ABM میتواند برای ارائه خطوط مبنا برای فیدهای ویدیویی آینده در یک صحنه استفاده شود، که از تشخیص فعالیت غیرمعمول به عنوان انحراف از این مدل پشتیبانی میکند. داشتن نمایه ای از حرکت نسبت به برخی از خطوط پایه می تواند به ما در توضیح و شناسایی انحراف در هنگام وقوع کمک کند. هر دوی این فرصتهای نوظهور ماهیت در حال تکامل مدلسازی عابر پیاده را برجسته میکنند، که در حال انتقال از پشتیبانی شبیهسازی ساده به ابزاری ارزشمند برای توصیف فعالیتهای واقعی و پیشبینیشده در یک صحنه است. به طور کلی، با توجه به مدلهای مبتنی بر عامل از نظر جغرافیایی صریح، میتوانیم رفتارهای انسانمانندی را بررسی کنیم که دادهها به تنهایی نمیتوانند ارائه کنند [ 23 ]]: تجهیزات ضبط حرکت / نظارت به تنهایی به ما نمی گوید که اگر مانعی در مرکز صحنه قرار گیرد یا یک در مسدود شود، چه اتفاقی ممکن است بیفتد، در حالی که یک مدل مبتنی بر عامل می تواند. علاوه بر این، با مدلسازی عابر پیاده در فضا و زمان، میتوانیم بررسی کنیم که چگونه مفروضات یا ایدههای اساسی در مورد نحوه استفاده از محیط فضایی خود را میتوان در یک شبیهسازی رایانهای و مقایسه با اطلاعات صحنه برای تعیین اینکه آیا این الگوها در واقعیت دیده میشوند یا خیر. -دنیا
با توجه به تنوع گسترده فضاها و فعالیتهای شهری در داخل آنها، همراه با ظهور منابع جدید و متنوع دادههای ردیابی، این مشارکت باید بهعنوان گام اول به سمت اکتشافات آینده نگریسته شود، نه به عنوان محصول نهایی. این یکی از دلایلی است که ما کد منبع و دادهها را ارائه میکنیم: برای محققان دیگر در صورت تمایل، مدل را در موقعیتهای مختلف بررسی کنند. علاوه بر این، خود مدل میتواند از طریق معرفی پارامترهای اضافی یا با کاوش در تکنیکهای دیگر مانند یادگیری ماشین یا چارچوبهای شناختی مختلف پیچیدهتر شود (به [ 88 ] مراجعه کنید.]) برای رفتارهای عامل که به عنوان مثال امکان ترکیب فعالیت های پیچیده مانند توقف برای صحبت با مردم، تکان دادن در اطراف ورودی ها و نقاط خروج را فراهم می کند. با نشان دادن اینکه حتی یک مدل مبتنی بر عامل از نظر جغرافیایی صریح نسبتاً ساده مانند SA 2 -ABM میتواند الگوهای اصلی یک صحنه پویا را تکرار کند، پتانسیل عظیم این رویکرد را برای فرصتهای نوظهور ارائه شده از طریق جفت کردن مدلهای مبتنی بر عامل با نشان دادهایم. داده های مکانی و زمانی




بدون نظر