


چکیده
:
مدلهای موجود روابط فضایی این را در نظر نمیگیرند که مفاهیم مختلف در سطوح مختلف در یک سلسله مراتب وجود دارند و به نوبه خود روابط فضایی در یک منطقه صحنه معین از مفاهیم خاص در نظر گرفته شده است. یک رویکرد برای تعیین وجود یک رابطه فضایی خاص، محاسبه مفاهیم سطح بالا مربوطه به صراحت با استفاده از تعمیم نقشه قبل از استنباط وجود رابطه فضایی مورد بحث است. ما این ایده را از طریق توسعه مدلی از رابطه فضایی ” ورود ” که ممکن است بین یک جاده و یک شهرک مسکونی وجود داشته باشد، بررسی می کنیم.
کلید واژه ها:
روابط فضایی ; مفاهیم سطح بالا ؛ تعمیم نقشه

1. مقدمه
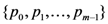
مورفی [ 1] یک مفهوم را به عنوان بازنمایی ذهنی مربوط به یک مقوله تعریف می کند. خانه مفهومی است که توسط فرهنگ لغت مریام وبستر به عنوان ساختمانی تعریف شده است که به عنوان محل زندگی یک یا چند خانواده عمل می کند. املاک مسکونی مفهومی سطح بالاتر است که توسط فرهنگ لغت مریام وبستر به عنوان گروهی از خانههای مسکونی یا خانههای آپارتمانی با طراحی مشابه تعریف شده است که معمولاً توسط یک مدیریت ساخته و فروخته یا اجاره میشوند. در این کار ما از اصطلاح املاک مسکن برای اشاره به نمونه خاصی از این مفهوم استفاده می کنیم. یعنی یک شهرک مسکونی که فقط از خانه های مسکونی مجزا، نیمه مستقل و پلکانی تشکیل شده است. املاک مسکونی یک ساختار رایج در بسیاری از کشورهای اروپایی مانند ایرلند است. اکثر شهرک های مسکونی دارای یک یا چند جاده متناظر هستند که امکان دسترسی به خانه های مورد نظر را فراهم می کند و به آنها جاده های دسترسی برای املاک مورد نظر می گویند. به عنوان مثال صحنه را در نظر بگیریدشکل 1 که املاک مسکونی Tudor Lawns واقع در Foxrock Dublin را نشان می دهد. جاده خاکستری مربوط به جاده دسترسی برای شهرک مسکونی مورد نظر است. برای یک صحنه معین که شامل یک منطقه مسکونی و مجموعه ای از جاده ها است، جاده دسترسی برای دارایی مورد نظر ممکن است به طور صریح ذخیره نشود اما می تواند از اطلاعات ضمنی در صحنه استخراج شود [ 2 ]. به عنوان مثال یک بازرسی بصری از شکل 1 نشان می دهد که جاده خاکستری دسترسی برای شهرک مسکونی مورد نظر است. استخراج اشکال خاصی از اطلاعات ضمنی از داده های مکانی را می توان مشکلی برای تعیین وجود روابط مکانی در نظر گرفت. برای مثال فعل enterمعمولاً برای توصیف رابطه فضایی که بین یک شهرک مسکونی و جاده دسترسی متناظر آن وجود دارد استفاده می شود. بنابراین می گوییم که جاده خاکستری وارد شهرک مسکونی در شکل 1 می شود.
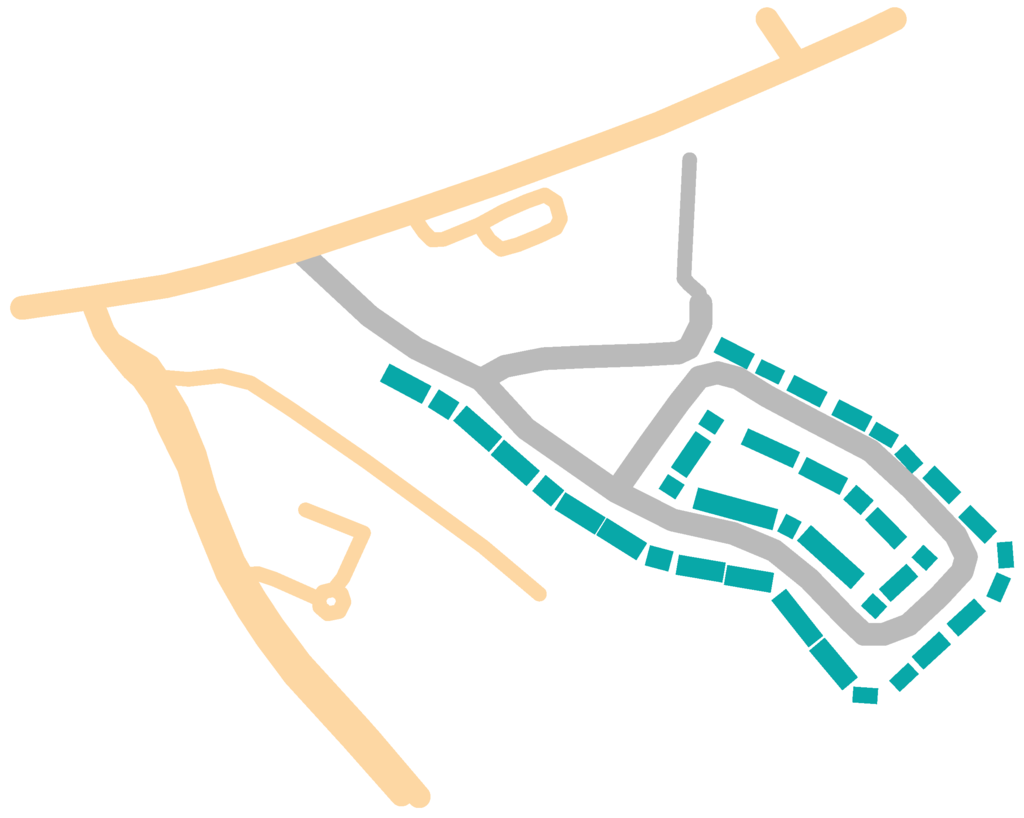
شکل 1. مجموعه ای از چند ضلعی های مربوط به خانه ها در یک شهرک مسکونی و تعدادی از خطوط مربوط به جاده ها نشان داده شده است. خط خاکستری نشان دهنده راه دسترسی برای شهرک مسکونی مورد نظر است. داده های گرفته شده از OpenStreetMap.
ظرفیت شناختی ما برای استنتاج این رابطه فضایی ورودی ها نتیجه توانایی ما برای نمایش اطلاعات مکانی با استفاده از مفاهیم سطح بالا قبل از استنباط وجود رابطه فضایی مورد بحث است. یعنی نشان دادن تک تک خانهها بهعنوان مفهوم شهرک مسکونی در سطح بالاتر قبل از استنباط وجود رابطه فضایی وارد میشود . علیرغم حجم وسیعی از کار بر روی مدل سازی روابط فضایی، همه مدل های موجود در نظر نمی گیرند که مفاهیم مختلف ممکن است در سطوح مختلف در یک سلسله مراتب وجود داشته باشد. تعدادی از نویسندگان قبلاً تأثیر تقسیم یا ادغام اشیاء را بر روابط فضایی در نظر گرفته اند [ 3 ، 4 ، 5]. اما این آثار در نظر نمی گیرند که مفاهیم مختلف در سطوح مختلف در یک سلسله مراتب وجود دارند و به نوبه خود روابط فضایی در یک صحنه معین تابعی از مفاهیم خاص در نظر گرفته شده است. در این کار ما پیشنهاد میکنیم که قبل از استنباط وجود رابطه فضایی مورد نظر، میتوان با محاسبه مفاهیم سطح بالای متناظر با استفاده از تعمیم نقشه، وجود یک رابطه فضایی را تعیین کرد. ما این ایده را از طریق توسعه مدلی از رابطه فضایی که ممکن است بین یک جاده و یک شهرک مسکونی وجود داشته باشد، بررسی می کنیم.
طرح این مقاله به شرح زیر است. در بخش 2 کارهای مرتبط را بررسی می کنیم. در بخش 3 مدلی از رابطه فضایی وارد می کنیم. بخش 4 این مدل را ارزیابی میکند و نشان میدهد که ابزار مفیدی برای طبقهبندی راههای دسترسی املاک مسکونی است. در نهایت در بخش 5 نتیجه گیری می کنیم و جهت گیری های احتمالی تحقیقات آینده را مورد بحث قرار می دهیم.
2. کارهای مرتبط
این بخش به سه بخش تقسیم می شود. در بخش 2.1 روشهای موجود برای استخراج اطلاعات ضمنی از نقشهها با تمرکز خاص بر اطلاعات مربوط به ساختمانها را به اختصار مرور میکنیم. در بخش 2.2 مدل های موجود روابط فضایی را بررسی می کنیم. بخش 2.3 موضوع تعمیم نقشه را مورد بحث قرار می دهد.
2.1. اطلاعات فضایی ضمنی
اطلاعات ضمنی مشتق شده از داده های مکانی می تواند برای پشتیبانی از بسیاری از برنامه ها مانند تعمیم نقشه (که این فرآیند به عنوان غنی سازی داده ها شناخته می شود) [ 6 ، 7 ]، بهبود کیفیت داده های مکانی تولید شده توسط کاربر [ 8 ]، تطبیق مجموعه داده های مکانی [ 9 ] استفاده شود. ] و به روز رسانی داده ها [ 10 ]. والتر و لو [ 2 ] یک طبقه بندی از اشکال مختلف اطلاعات ضمنی ارائه می کنند که می تواند از داده های مکانی مشتق شود. اینها شامل نوع نقشه، اشیاء منفرد، اشیاء پیچیده و مناطق است.
همانطور که توسط لوشر و همکاران بیان شده است. [ 11 ] اشیاء ساختمانی به ندرت در مجموعه دادههای فضایی بهطور غنی نسبت داده میشوند. در نتیجه بسیاری از نویسندگان روش هایی را برای استخراج اطلاعات ضمنی مربوط به ساختمان ها پیشنهاد کرده اند. Regnault [ 12 ]، Yan et al. [ 13 ]، اشتاینهاوئر و همکاران. [ 14 ] و Qi و Li [ 15 ] همه روشهای پیشنهادی برای گروهبندی ساختمانها هستند. ژانگ و همکاران [ 16 ] یک دسته بندی از الگوهای ساختمانی را پیشنهاد کرد که شامل خطی، منحنی، تراز در امتداد جاده، شبکه مانند و بدون ساختار است. تشخیص الگوهای ساختمانی خطی به طور گسترده مورد مطالعه قرار گرفته است [17 ، 18 ]. ژانگ و همکاران [ 16 ] الگوریتمهایی برای تشخیص الگوهای ساختمانی بدون ساختار و تراز در امتداد جاده پیشنهاد کرد. لوشر و همکاران [ 19 ] نشان داد که معناشناسی سطح بالاتر، مانند خانه های تراس دار، می تواند از ترازهای ساختمان و سایر معیارها استخراج شود. هاونرت [ 20 ] روشی را برای تشخیص تقارن در ردپای ساختمان پیشنهاد کرد.
2.2. روابط فضایی
رابطه فضایی وسیله ای برای مدل سازی یک ویژگی خاص از رابطه فضایی است که بین دو یا چند شی وجود دارد. روابط فضایی ممکن است به عنوان روابط توپولوژیکی، متریک و نظم طبقه بندی شود [ 21 ]. خصوصیات مدل روابط توپولوژیکی که تحت تحولات توپولوژیکی ثابت مانند چرخش، ترجمه و مقیاس بندی ثابت هستند [ 22 ]. خواص مدل روابط متریک در مورد فاصله و جهت. خصوصیات مدل روابط نظم مربوط به ترتیب جزئی و کلی اشیاء همانطور که با حروف اضافه مانند جلو , پشت , بالا و پایین توصیف می شود [ 23 .]. بسیاری از روابط فضایی را نمی توان منحصراً به عنوان توپولوژیک، متریک یا نظم طبقه بندی کرد. چنین روابطی شامل رابطه تراز-در امتداد جاده است که بین مجموعه ای از ساختمان ها و یک جاده وجود دارد. تعدادی از نویسندگان تأثیر تقسیم و ادغام اشیاء را بر روابط توپولوژیکی در نظر گرفته اند [ 3 ، 4 ، 5 ].
تحقیقات در مورد موضوع روابط فضایی با انگیزه طیف گسترده ای از زمینه های کاربردی ممکن است. روابط فضایی را می توان برای توصیف محدودیت هایی که زیرمجموعه ای از اشیاء فضایی را مشخص می کنند استفاده کرد. برای مثال، میتوان زیر مجموعهای از اشیاء را که در شعاع معینی از یک نقطه قرار میگیرند با استفاده از یک رابطه متریک مشخص کرد [ 21 ]. روابط فضایی همچنین می تواند به عنوان بستری برای استنتاج فضایی و استدلال فضایی کیفی استفاده شود [ 24 ]. به عنوان مثال، اگر با استفاده از روابط فضایی مشخص شود که یک شی در یک شی قرار دارد که به نوبه خود در داخل یک شی قرار دارد، مستقیماً می توان استنباط کرد که در داخل یک شی قرار دارد.  . برخی از روابط فضایی دارای یک بیان زبان طبیعی به راحتی قابل تفسیر هستند که پتانسیل تعامل زبانی با داده های مکانی را ارائه می دهد [ 22 ، 25 ، 26 ]. از دیگر کاربردهای روابط فضایی می توان به روباتیک و بینایی کامپیوتری سطح بالا اشاره کرد [ 27 ]. مجموعههای زیادی از روابط فضایی پیشنهاد شدهاند، اما غالبترین آنها مدلهای تقاطع Egenhofer [ 28 ، 29 ] و حساب ارتباط منطقه (RCC ) از Randell و همکاران هستند. [ 30]. به دلیل ماهیت همه جا حاضر آنها، ما این موارد را به تفصیل توصیف نمی کنیم کافی است بگوییم که هر یک کاملاً از روابط توپولوژیکی باینری تشکیل شده است و هر دو مجموعه در واقع معادل هستند. شرح مفصلی از هر دو این مجموعه را می توان در [ 31 ] یافت.
. برخی از روابط فضایی دارای یک بیان زبان طبیعی به راحتی قابل تفسیر هستند که پتانسیل تعامل زبانی با داده های مکانی را ارائه می دهد [ 22 ، 25 ، 26 ]. از دیگر کاربردهای روابط فضایی می توان به روباتیک و بینایی کامپیوتری سطح بالا اشاره کرد [ 27 ]. مجموعههای زیادی از روابط فضایی پیشنهاد شدهاند، اما غالبترین آنها مدلهای تقاطع Egenhofer [ 28 ، 29 ] و حساب ارتباط منطقه (RCC ) از Randell و همکاران هستند. [ 30]. به دلیل ماهیت همه جا حاضر آنها، ما این موارد را به تفصیل توصیف نمی کنیم کافی است بگوییم که هر یک کاملاً از روابط توپولوژیکی باینری تشکیل شده است و هر دو مجموعه در واقع معادل هستند. شرح مفصلی از هر دو این مجموعه را می توان در [ 31 ] یافت.


 . برخی از روابط فضایی دارای یک بیان زبان طبیعی به راحتی قابل تفسیر هستند که پتانسیل تعامل زبانی با داده های مکانی را ارائه می دهد [ 22 ، 25 ، 26 ]. از دیگر کاربردهای روابط فضایی می توان به روباتیک و بینایی کامپیوتری سطح بالا اشاره کرد [ 27 ]. مجموعههای زیادی از روابط فضایی پیشنهاد شدهاند، اما غالبترین آنها مدلهای تقاطع Egenhofer [ 28 ، 29 ] و حساب ارتباط منطقه (RCC ) از Randell و همکاران هستند. [ 30]. به دلیل ماهیت همه جا حاضر آنها، ما این موارد را به تفصیل توصیف نمی کنیم کافی است بگوییم که هر یک کاملاً از روابط توپولوژیکی باینری تشکیل شده است و هر دو مجموعه در واقع معادل هستند. شرح مفصلی از هر دو این مجموعه را می توان در [ 31 ] یافت.
. برخی از روابط فضایی دارای یک بیان زبان طبیعی به راحتی قابل تفسیر هستند که پتانسیل تعامل زبانی با داده های مکانی را ارائه می دهد [ 22 ، 25 ، 26 ]. از دیگر کاربردهای روابط فضایی می توان به روباتیک و بینایی کامپیوتری سطح بالا اشاره کرد [ 27 ]. مجموعههای زیادی از روابط فضایی پیشنهاد شدهاند، اما غالبترین آنها مدلهای تقاطع Egenhofer [ 28 ، 29 ] و حساب ارتباط منطقه (RCC ) از Randell و همکاران هستند. [ 30]. به دلیل ماهیت همه جا حاضر آنها، ما این موارد را به تفصیل توصیف نمی کنیم کافی است بگوییم که هر یک کاملاً از روابط توپولوژیکی باینری تشکیل شده است و هر دو مجموعه در واقع معادل هستند. شرح مفصلی از هر دو این مجموعه را می توان در [ 31 ] یافت.همانطور که توسط Cohn و Hazarika [ 24 ] بیان شد، همه مجموعههای روابط فضایی به یک اندازه مفید نیستند و مجموعه واقعی مورد استفاده باید با کار در حال انجام مرتبط باشد. یکی از اهداف اصلی در حوزه تحقیقاتی روابط فضایی این است که مشخص شود آیا می توان مجموعه واحد جهانی از روابط را تعریف کرد که با توجه به بسیاری از کاربردها عملگرا باشد. یک رویکرد امیدوارکننده برای دستیابی به این هدف، مدلسازی جنبههای روابط فضایی را که شناخت انسان مدلسازی میکند، پیشنهاد میکند. این منجر به استفاده از اصطلاح شناختی کافی برای توصیف مجموعه ای از روابط فضایی شده است که تصور می شود مدل دقیقی از این جنبه ها هستند [ 32 , 33 ].]. مطالعات اولیه بر نقش روابط توپولوژیکی در تعریف مدلهای شناختی کافی متمرکز بود. مطالعه مارک و اگنهوفر [ 34 ] پیشنهاد کرد که روابط توپولوژیکی به تنهایی، و به ویژه مدل های تقاطع Egenhofer [ 28 ]، برای دستیابی به کفایت شناختی کافی است. این منجر به عبارت معروف ” توپولوژی مهم است، متریک پالایش می کند ” توسط Egenhofer و Mark [ 35 ]. این ادعا توسط آثار کلمنتینی و همکاران تأیید شد. [ 36 ] و رنز و همکاران. [ 32 ] اما این نویسندگان ادعا کردند که سطح دقیق تری از دانه بندیمدل های تقاطع برای دستیابی به کفایت شناختی ضروری بود . با این حال مطالعه توسط شریف و همکاران. [ 22 ] نشان می دهد که روابط توپولوژیکی به تنهایی ممکن است برای کفایت شناختی کافی نباشد . نویسندگان پیشنهاد می کنند که ترکیبی از روابط توپولوژیکی و متریک ضروری است. کار اخیر کلیپل [ 33 ] نشان می دهد که اگر کسی بخواهد مجموعه ای از روابط فضایی را تعریف کند که از نظر شناختی کافی هستند، باید معناشناسی را نیز در نظر گرفت .
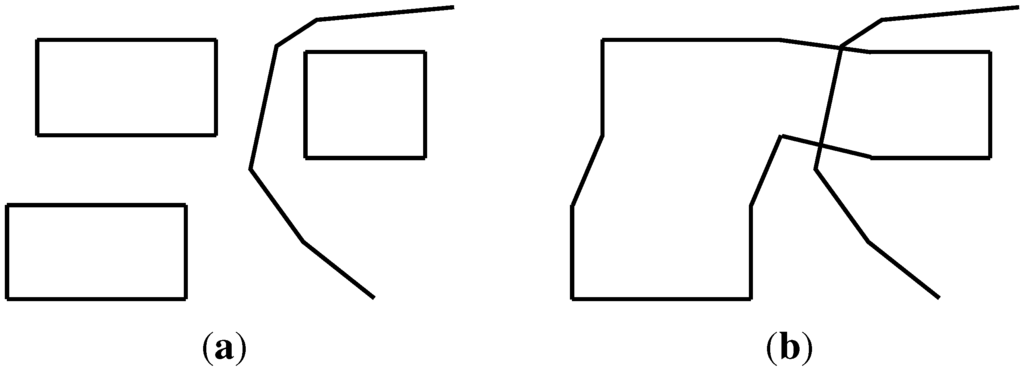
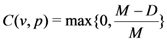
روابط فضایی را می توان به عنوان روابط کیفی یا غیرکیفی نیز طبقه بندی کرد. روابط کیفی ویژگی هایی را مدل می کند که ماهیت مبهم یا مبهم و احتمالاً وابسته به زمینه دارند [ 37 ]. تعیین وجود چنین روابطی به طور کلی مستلزم مدل سازی برخی از جنبه های شناخت انسان است. نمونههایی از روابط کیفی شامل رابطهای است که نشان میدهد آیا یک شی تقریباً به طور کامل در یک شی دیگر قرار دارد [ 27 ، 38 ] یا رابطهای که نشان میدهد آیا یک شی بین دو شی دیگر قرار دارد [ 39 ، 40 ]. این روابط در شکل 2 نشان داده شده است(الف، ب) به ترتیب. رابطه فضایی که نشان می دهد آیا جاده ای که وارد یک شهرک مسکونی می شود که در بخش 1 مورد بحث قرار گرفته است نیز یک رابطه کیفی است. از سوی دیگر، روابط فضایی غیرکیفی ویژگیهایی را مدل میکنند که ماهیت مبهم یا فازی ندارند و وابسته به زمینه نیستند. چنین روابطی تعریف هندسی دقیقی دارند. مثالها شامل روابط دوتایی است که نشان میدهد آیا دو خط قطع میشوند یا یک شی به طور کامل در داخل دیگری قرار دارد [ 21 ].

شکل 2. در ( الف ) شی تقریباً به طور کامل در داخل شی قرار دارد . در ( ب ) شی بین اشیاء و .



2.3. تعمیم نقشه
انجمن بین المللی کارتوگرافی تعمیم را به عنوان “انتخاب و نمایش ساده جزئیات متناسب با مقیاس و/یا هدف نقشه” تعریف کرد [ 41 ]. تعمیم به اهداف مختلفی از جمله ایجاد و نگهداری داده های مکانی در مقیاس های چندگانه، تجسم نقشه برداری در مقیاس های متغیر و کاهش داده ها عمل می کند [ 42 ]. مدلها یا چارچوبهای مفهومی زیادی از فرآیند تعمیم در هر دو حوزه دستی و دیجیتال وجود دارد. یک نمای کلی از این موارد را می توان در [ 41 ، 43 ] یافت.
هدف از تعمیم نقشه، تولید یک نمایش نقشه مناسب با توجه به مجموعه ای از محدودیت ها است [ 44 ]. Weibel [ 45 ] گشتالت، معنایی، متریک و توپولوژیکی را به عنوان چهار محدودیت شناسایی کرد. یک محدودیت گشتالت ویژگی های مهم شکل شی را حفظ می کند. به عنوان مثال، بسیاری از نویسندگان تکنیک های تجمع را برای ساختمان هایی پیشنهاد کرده اند که ویژگی های شکل مستطیل بودن [ 46 ، 47 ] و تقارن [ 20 ] را حفظ می کنند. محدودیتهای معنایی تضمین میکنند که تعمیم به شیوهای انجام میشود که تابعی از معناشناسی شی است. کیلر و همکاران [ 48 ] و هاونرت و وولف [ 49] تکنیکهای تجمعی را پیشنهاد میکند که اطمینان حاصل میکند که اشیاء ادغام شده عمدتاً به یک کلاس تعلق دارند. محدودیت های متریک تعمیم را به شیوه ای انجام می دهند که تابعی از یک تابع خطا است. در نهایت، یک محدودیت توپولوژیکی تلاش می کند تا اطمینان حاصل کند که فرآیند تعمیم روابط توپولوژیکی بین اشیاء را حفظ می کند [ 44 ، 50 ].
تعمیم نقشه با استفاده از یک یا تعدادی عملگر تعمیم انجام می شود. جونز [ 51 ] هشت دسته از عملگرهای تعمیم را شناسایی کرد. اینها عبارتند از حذف، ساده سازی، نوع سازی، اغراق، افزایش، فروپاشی، تجمع و جابجایی [ 50 ]. در این مقاله ما فقط عملگر تجمیع را در نظر می گیریم اما بحث مفصلی از عملگرهایی که می توانند برای ساختمان ها اعمال شوند در [ 52 ] موجود است. تجمع ممکن است به عنوان جایگزینی مجموعه ای از اشیاء با یک شی واحد [ 53 ] تعریف شود. جایگزینی مجموعه ای از اشیاء خانه با یک شیء واحد مسکونی، همانطور که در بخش 1 توضیح داده شد ، نمونه ای از تجمیع است. رگنولد [ 53] پیشنهاد می کند که تجمیع ممکن است با استفاده از یکی از چهار استراتژی زیر انجام شود. تجمع با جابجایی، مجموعه اشیاء را تا زمانی که لمس یا همپوشانی کنند جابه جا می کند و سپس این اشیاء را ادغام می کند [ 54 ]. اگر اجسام مورد نظر در ابتدا لمس شوند، جابجایی لازم نیست و می توان آنها را به سادگی ادغام کرد [ 48 ، 49 ]. انباشته شدن توسط سیل، مجموعه اشیاء مورد نظر را با یک شی واحد با وسعت فضایی بیشتر مانند بدنه محدب جایگزین می کند. تجمیع با نمونه برداری، مجموعه اشیاء را با یک زیر مجموعه جایگزین می کند. این نیز به عنوان typification شناخته می شود. در نهایت تجمع با اتصال اشیاء [ 3 ، 46 ، 55] تا حد زیادی متداول ترین روش مورد استفاده است و تمرکز تحقیق ارائه شده در اینجا است. اکنون به تفصیل نحوه عملکرد این متدولوژی را شرح می دهیم.
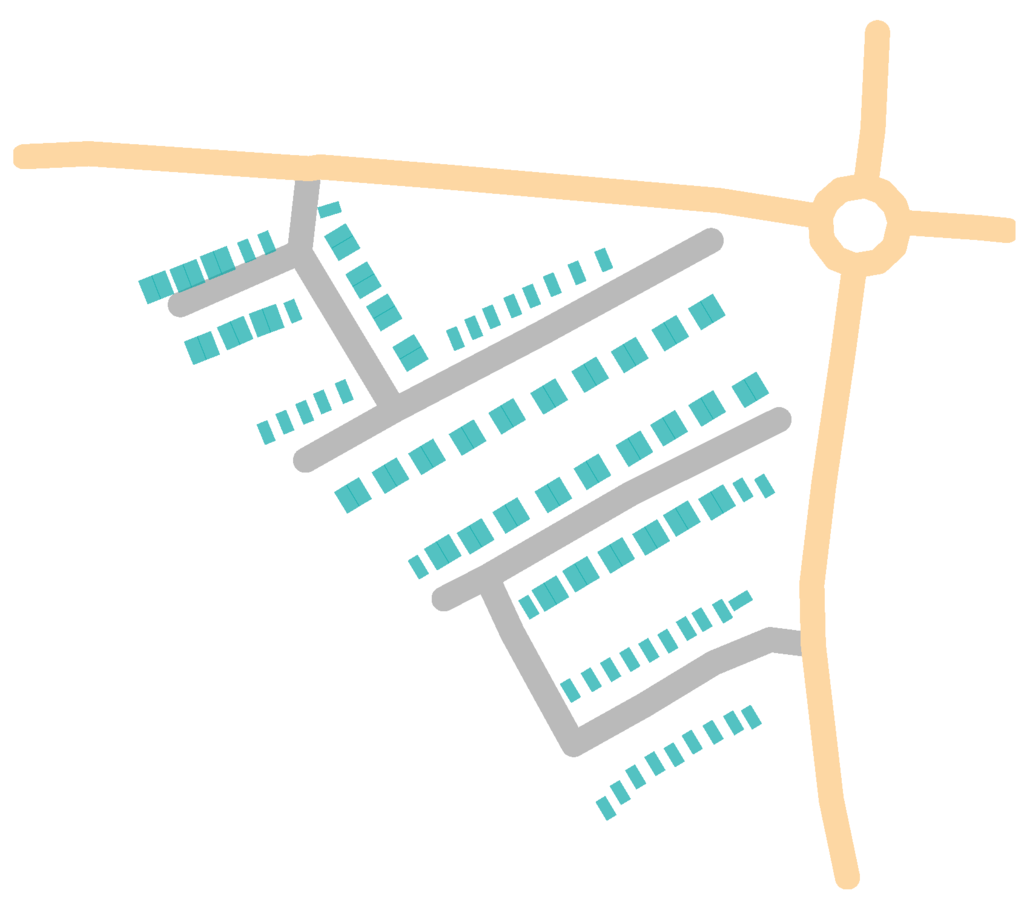
تجمع با اتصال اشیا به طور کلی در دو مرحله انجام می شود. اولین مرحله از گروه بندی اشیاء مجموعه ای از اشیاء را که نیاز به ادغام دارند شناسایی می کند. مرحله دوم ادغام اشیا مجموعه ای از رابط ها را تعریف می کند که اشیاء را در هر مجموعه به هم متصل می کند. سپس تمام اشیاء و کانکتورها در هر مجموعه ادغام می شوند. به عنوان مثال صحنه در شکل 3 (الف) حاوی چند ضلعی ها و . به منظور ادغام این اشیاء، ما یک رابط ممکن را به عنوان چند ضلعی تعریف می کنیم که با ناحیه خاکستری در شکل 3 نشان داده شده است. (ب). سپس ادغام دو چند ضلعی به عنوان اتحاد چند ضلعی ها و رابط مربوطه تعریف می شود. که نتیجه آن با چند ضلعی در شکل 3 (ج) نشان داده شده است.


 (ب). سپس ادغام دو چند ضلعی به عنوان اتحاد چند ضلعی ها و رابط مربوطه تعریف می شود. که نتیجه آن با چند ضلعی در شکل 3 (ج) نشان داده شده است.
(ب). سپس ادغام دو چند ضلعی به عنوان اتحاد چند ضلعی ها و رابط مربوطه تعریف می شود. که نتیجه آن با چند ضلعی در شکل 3 (ج) نشان داده شده است. 
شکل 3. دو چند ضلعی در ( a ) با استفاده از اتصال در ( b ) ادغام می شوند تا نتیجه در ( c ) به دست آید.
بسیاری از نویسندگان متدولوژی هایی را پیشنهاد کرده اند که هر دو مرحله گروه بندی اشیاء و ادغام را انجام می دهند [ 13 ، 54 ، 55 ، 56 ]. در همین حال، برخی از نویسندگان روشهایی را پیشنهاد میکنند که یک مرحله را انجام میدهند. به عنوان مثال Steinhauer et al. [ 14 ] و Qi و Li [ 15 ] تکنیک هایی را برای گروه بندی اشیا به تنهایی توصیف می کنند. روش شناسی هایی که بر وظیفه ادغام تمرکز دارند عمدتاً از دو رویکرد [ 53 ] پیروی می کنند. اولین مورد از عملگرهای مورفولوژیکی (فرسایش و اتساع) استفاده می کند و به ویژه برای داده های شطرنجی مناسب است [ 57 ]. روند دیگر از ساختار هندسی مثلثی دلونی استفاده می کند و برای داده های برداری مناسب است [13 ، 54 ، 55 ، 56 ]. لازم به ذکر است که تجمیع اشیاء کاربردهای زیادی در خارج از حوزه تعمیم نقشه مانند تولید یک شکل یا ردپای از مجموعه ای از نقاط دارد [ 58 ].
3. مدل پیشنهادی
همانطور که در مقدمه بحث شد مدلهای موجود روابط فضایی به این نکته توجه نمیکنند که مفاهیم مختلف در سطوح مختلف در یک سلسله مراتب وجود دارند و به نوبه خود روابط فضایی در یک صحنه معین تابعی از مفاهیم خاص در نظر گرفته شده است. ما پیشنهاد میکنیم که دو رویکرد ممکن برای مدلسازی یک رابطه فضایی خاص وجود دارد. اولین مورد این است که مفاهیم سطح بالاتر لازم را به طور صریح با استفاده از تعمیم نقشه قبل از استنباط وجود رابطه فضایی مورد نظر، مدل سازی کنیم. رویکرد دوم، مدل سازی مفاهیم سطح بالاتر ضروری به طور ضمنی با استفاده از مجموعه ای از مفاهیم سطح پایین تر قبل از استنباط وجود رابطه فضایی مورد نظر است. به عنوان مثال، یک شهرک مسکونی ممکن است به طور ضمنی با مجموعه ای که شامل تمام خانه های متعلق به املاک مورد نظر است، مدل شود.
در این بخش ما با ارائه مدلی از رابطه فضایی که ممکن است بین یک جاده و یک شهرک مسکونی وجود داشته باشد، رویکرد قبلی را بررسی میکنیم . مدل شامل دو مرحله است. مرحله اول ادغام اشیاء را با هدف ایجاد یک شی مطابق با مسکن انجام می دهد. این امر استنتاج با توجه به رابطه فضایی مورد نظر را تسهیل می کند. مرحله دوم این استنتاج را انجام می دهد.
3.1. مرحله تعمیم
روش تعمیم پیشنهادی فقط وظیفه ادغام اشیاء را انجام می دهد و مجموعه اشیایی را که نیاز به ادغام دارند از قبل شناخته شده است . یک رویکرد تجمیع با اتصال اشیاء برای ادغام استفاده می شود که وظیفه ادغام را به یکی از تعریف مجموعه مناسبی از اتصال دهنده ها بین اشیاء مورد نظر کاهش می دهد. اپراتور مبتنی بر Adapt Merge Operator of Ware et al. [ 54 ] برای تعریف کانکتورهای مورد نظر استفاده می شود. انگیزه این انتخاب اپراتور این بود که Ware و همکارانش. [ 54 ] نشان داد که اپراتور Adapt Mergeهنگامی که برای مجموعه ای از چند ضلعی ها که ساختمان ها را نشان می دهند، به نتایج خوبی دست می یابد. این عملگر به صورت زیر عمل می کند.

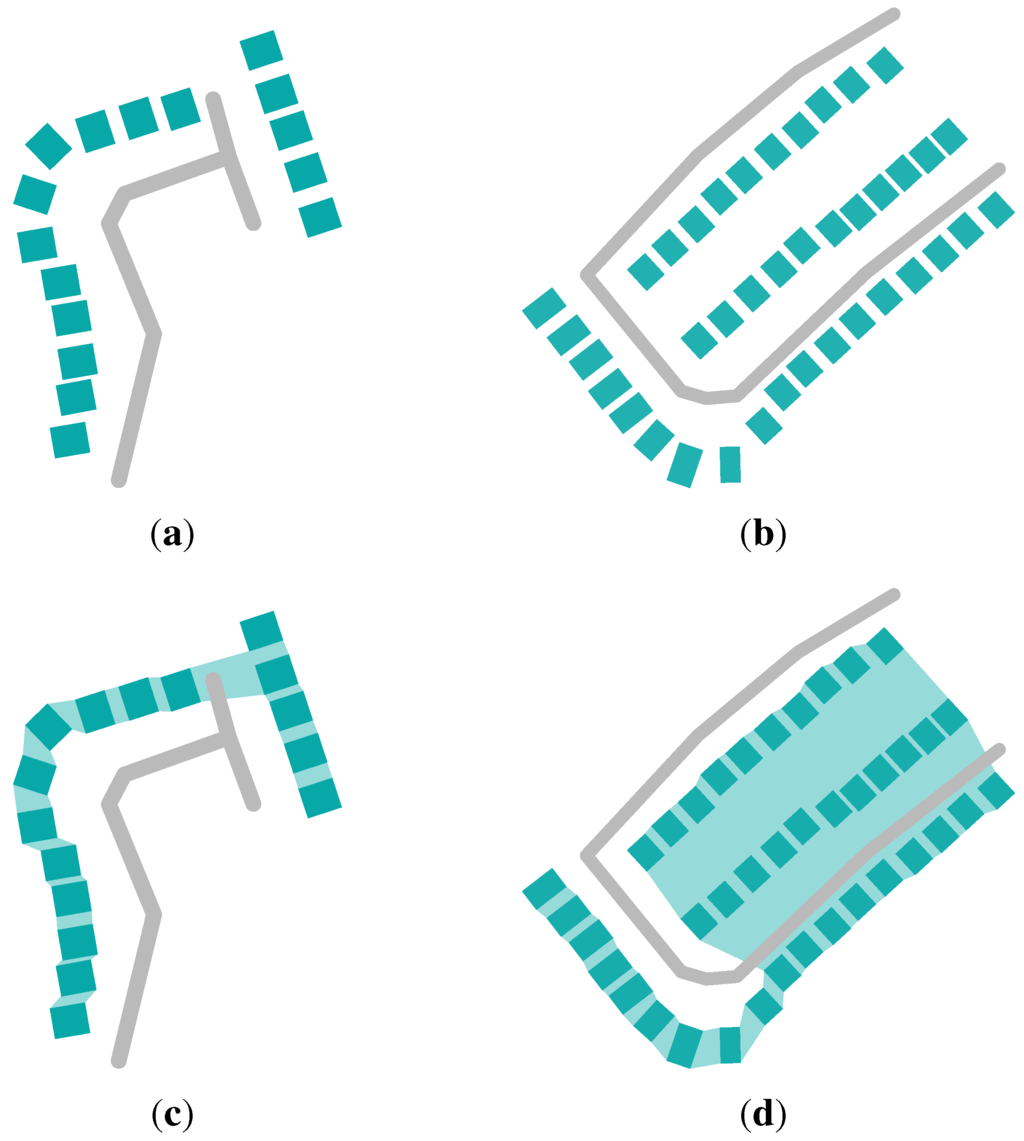
شکل 4. سه چند ضلعی در ( a ) از طریق مراحل ( b ) تا ( e ) با هم ادغام می شوند تا نتیجه در ( f ) به دست آید.
با توجه به مجموعه ای از چند ضلعی ها، یک مثلث دلونی محدود محاسبه می شود و تمام یال های داخلی چند ضلعی ها حذف می شوند. به عنوان مثال یک صحنه حاوی سه چند ضلعی و مثلث متناظر آن به ترتیب در شکل 4 (a,b) نمایش داده شده است. سپس کوتاهترین لبه، در این مثلث که دو چند ضلعی مختلف را به هم متصل می کند، مشخص می شود. این چند ضلعی ها از نظر فضایی نزدیکترین در صحنه مطابقت دارند. در شکل 4 (ب) لبه برچسب گذاری شده است. دو چند ضلعی مجاور و مجموعه متناظر مثلث های متصل تعیین می شوند. این مجموعه مثلث تحت عنوان . مجموعه مربوط به شکل 4 (ب) شامل سه مثلث است و با ناحیه خاکستری در شکل 4 (ج) نشان داده شده است. بعد زیرمجموعه ای از , تحت عنوان , با از بین بردن آن مثلث هایی که مجاور نیستند و دارای لبه ای به طول بیشتر از بار طول . مربوط به شکل 4 (ج) شامل دو چند ضلعی است و با ناحیه خاکستری در شکل 4 (د) نشان داده شده است. و دو چند ضلعی مجاور با هم ادغام می شوند تا یک چند ضلعی واحد تشکیل دهند. نتیجه اعمال این مرحله به شکل 4 (د) در شکل 4 نمایش داده شده است (ه). این فرآیند شناسایی و ادغام دو چند ضلعی سپس تکرار می شود تا زمانی که یک چند ضلعی باقی بماند. نتیجه ادغام سه چند ضلعی در شکل 4 (الف) در شکل 4 (f) نمایش داده شده است.

 (ب) شامل سه مثلث است و با ناحیه خاکستری در شکل 4 (ج) نشان داده شده است. بعد زیرمجموعه ای از , تحت عنوان , با از بین بردن آن مثلث هایی که مجاور نیستند و دارای لبه ای به طول بیشتر از بار طول . مربوط به شکل 4 (ج) شامل دو چند ضلعی است و با ناحیه خاکستری در شکل 4 (د) نشان داده شده است. و دو چند ضلعی مجاور با هم ادغام می شوند تا یک چند ضلعی واحد تشکیل دهند. نتیجه اعمال این مرحله به شکل 4 (د) در شکل 4 نمایش داده شده است
(ب) شامل سه مثلث است و با ناحیه خاکستری در شکل 4 (ج) نشان داده شده است. بعد زیرمجموعه ای از , تحت عنوان , با از بین بردن آن مثلث هایی که مجاور نیستند و دارای لبه ای به طول بیشتر از بار طول . مربوط به شکل 4 (ج) شامل دو چند ضلعی است و با ناحیه خاکستری در شکل 4 (د) نشان داده شده است. و دو چند ضلعی مجاور با هم ادغام می شوند تا یک چند ضلعی واحد تشکیل دهند. نتیجه اعمال این مرحله به شکل 4 (د) در شکل 4 نمایش داده شده است 
 (ه). این فرآیند شناسایی و ادغام دو چند ضلعی سپس تکرار می شود تا زمانی که یک چند ضلعی باقی بماند. نتیجه ادغام سه چند ضلعی در شکل 4 (الف) در شکل 4 (f) نمایش داده شده است.
(ه). این فرآیند شناسایی و ادغام دو چند ضلعی سپس تکرار می شود تا زمانی که یک چند ضلعی باقی بماند. نتیجه ادغام سه چند ضلعی در شکل 4 (الف) در شکل 4 (f) نمایش داده شده است.عملگر ادغام فوق مانع از ایجاد تقاطع بین نتیجه ادغام و سایر اشیاء در صحنه نمی شود. به عنوان مثال صحنه در شکل 5 (a) را در نظر بگیرید که شامل سه چند ضلعی و یک خط است. نتیجه ادغام سه چند ضلعی با استفاده از این روش در شکل 5 (ب) نشان داده شده است که در آن یک تقاطع بین چند ضلعی های ادغام شده و خط وجود دارد.
شکل 5. ادغام چند ضلعی ها در ( a ) یک تقاطع هندسی با خط را همانطور که در ( b ) نشان داده شده است، معرفی می کند.
3.2. مرحله استنتاج
در این بخش تابعی را توضیح می دهیم که درجه ورود یک خط مربوط به یک جاده را به چند ضلعی مربوط به یک منطقه مسکونی تعیین می کند. توسط تابع دیگری اهرم می شود که درجه ورود یک نقطه را که روی آن قرار دارد تعیین می کند. حاصلضرب توابعی است که به ترتیب درجه احاطه و نزدیک به مرکز را اندازه میگیرند. با مطالعه رابطه فضایی اینترها در عمق، نویسندگان معتقدند که هر دو این ویژگیها نقشی غالب در درک آن دارند.






 در عمق، نویسندگان معتقدند که هر دو این ویژگیها نقشی غالب در درک آن دارند.
در عمق، نویسندگان معتقدند که هر دو این ویژگیها نقشی غالب در درک آن دارند.برای محاسبه ابتدا مجموعه ای از پرتوها تولید می کنیم که در آن یک پرتو با منبع و جهت است. به عنوان مثال در شکل 6 مجموعه ای از پرتوها برای هر نقطه مربوطه که در آن نشان داده شده است. اجازه دهید تابعی باشد که مقدار if را قطع می کند و مقدار دیگری را برمی گرداند . با استفاده از رابطه (1) محاسبه می شود.







 مقادیر را در بازه می گیرد. اگر در داخل قرار داشته باشد و کاملا احاطه شده باشد، به ارزیابی خواهد رسید . این مورد برای نقاط شکل 6 (a,c) است. اگر در داخل قرار نگیرد ، به عددی کمتر یا مساوی برای نشان دادن درجه احاطه شده توسط . این مورد برای نقطه ای در شکل 6 (ب) است که در آن به . در پیاده سازی ما مقدار 720 به متغیر اختصاص داده شد که به وضوح وضوح کافی را ارائه می دهد.
مقادیر را در بازه می گیرد. اگر در داخل قرار داشته باشد و کاملا احاطه شده باشد، به ارزیابی خواهد رسید . این مورد برای نقاط شکل 6 (a,c) است. اگر در داخل قرار نگیرد ، به عددی کمتر یا مساوی برای نشان دادن درجه احاطه شده توسط . این مورد برای نقطه ای در شکل 6 (ب) است که در آن به . در پیاده سازی ما مقدار 720 به متغیر اختصاص داده شد که به وضوح وضوح کافی را ارائه می دهد. 


شکل 6. در هر شکل مجموعه 8 پرتوی مربوط به یک نقطه با فلش نشان داده شده است. مرکز هر چند ضلعی را نشان می دهد.

برای محاسبه ابتدا مرکز مرکزی را محاسبه می کنیم که نشان داده شده است . بعد ما حداکثر فاصله را محاسبه می کنیم که نشان داده شده است بین و نقطه ای که روی مرز قرار دارد . این با استفاده از معادله (2) محاسبه می شود که در آن مجموعه رئوس نشان دهنده .


اجازه دهید فاصله بین و ; یعنی . با استفاده از رابطه (3) محاسبه می شود.


 مقادیر را در بازه می گیرد. به طور خاص، اگر برابر است ، به ارزیابی خواهد شد . اگر فاصله بین و کمتر از , به عددی در بازه کاهش با فاصله از . در غیر این صورت به ارزیابی خواهد شد . به عنوان مثال، مربوط به صحنه در شکل 6 (c) به عددی نزدیک به ارزیابی می شود زیرا فاصله آن از نزدیک به . در همین حال، به دلیل نزدیکتر بودن هر یک به مرکز ، مطابق با صحنه های شکل 6 (الف) و (ب) به و
مقادیر را در بازه می گیرد. به طور خاص، اگر برابر است ، به ارزیابی خواهد شد . اگر فاصله بین و کمتر از , به عددی در بازه کاهش با فاصله از . در غیر این صورت به ارزیابی خواهد شد . به عنوان مثال، مربوط به صحنه در شکل 6 (c) به عددی نزدیک به ارزیابی می شود زیرا فاصله آن از نزدیک به . در همین حال، به دلیل نزدیکتر بودن هر یک به مرکز ، مطابق با صحنه های شکل 6 (الف) و (ب) به و 
 به ترتیب. پس از محاسبه و در نهایت با استفاده از رابطه (4) محاسبه می کنیم.
به ترتیب. پس از محاسبه و در نهایت با استفاده از رابطه (4) محاسبه می کنیم.

 مقادیر را در بازه می گیرد. به مقدار هم به عنوان تابع و هم به ارزش نزدیک می شود . به عنوان مثال، مقادیر مربوط به صحنه های شکل 6 (a-c) به ترتیب 0.71 ( )، 0.40 ( ) و 0.09 ( ) است. اکنون توجه خود را به محاسبه میزان ورود یک خط به چند ضلعی معطوف می کنیم . اجازه دهید مشخص کنید که نقطه روی خط قرار دارد. با معادله (5) تعریف می شود.
مقادیر را در بازه می گیرد. به مقدار هم به عنوان تابع و هم به ارزش نزدیک می شود . به عنوان مثال، مقادیر مربوط به صحنه های شکل 6 (a-c) به ترتیب 0.71 ( )، 0.40 ( ) و 0.09 ( ) است. اکنون توجه خود را به محاسبه میزان ورود یک خط به چند ضلعی معطوف می کنیم . اجازه دهید مشخص کنید که نقطه روی خط قرار دارد. با معادله (5) تعریف می شود. 




محاسبات دقیقاً یک مسئله بهینه سازی پیچیده را نشان می دهد که ما یک راه حل شکل بسته برای آن نداریم. برای غلبه بر این مشکل، این تابع را با استفاده از روش زیر تقریب میزنیم. ابتدا مجموعه ای از نقاط را انتخاب می کنیم که در آن فاصله بین دو نقطه متوالی و با اندازه گیری فاصله در امتداد خط ثابت است. در اجرای خود ما به اندازه طول اندازه گیری شده بر حسب متر تعیین کردیم تا فاصله یک متری بین نقاط متوالی را بدست آوریم.




4. ارزیابی
در این بخش مدل رابطه فضایی را که در بخش 3 ارائه شده است، ارزیابی می کنیم . باقی مانده این بخش به سه بخش تقسیم می شود. بخش 4.1 داده های مورد استفاده در ارزیابی را شرح می دهد. بخش 4.2 یک ارزیابی کیفی از مدل ارائه می کند. بخش 4.3 نشان میدهد که این مدل ممکن است برای طبقهبندی دقیق جادههای دسترسی املاک مسکونی استفاده شود.
شکل 7. مجموعه ای از چند ضلعی های مربوط به خانه ها در یک شهرک مسکونی و تعدادی از خطوط مربوط به جاده ها نشان داده شده است. خطوط خاکستری نشان دهنده راه های دسترسی برای شهرک مسکونی مورد نظر است. داده های گرفته شده از OpenStreetMap.
4.1. داده های فضایی
داده های مورد استفاده در این مطالعه از OpenStreetMap (OSM) ( http://www.openstreetmap.org/ ) گرفته شده است. OSM شکلی از اطلاعات جغرافیایی داوطلبانه (VGI) است [ 59] که ممکن است به عنوان مشارکت گسترده تعداد زیادی از شهروندان خصوصی در ایجاد داده های جغرافیایی یا مکانی تعریف شود. مجموعه مناطق مورد مطالعه زیر، که هر کدام در ایرلند واقع شده اند، انتخاب شدند: شهر دوبلین، شهرستان گوری وکسفورد، شهر وکسفورد، رابرتستون کیلدر، کیلمیج کیلدر، شهر کارلو. این مناطق خاص به این دلیل انتخاب شدند که هر کدام یک منطقه شهری است که نمایندگی OSM مربوطه شامل شهرک های مسکونی برای آن است. مجموعهای متشکل از شصت صحنه شامل شهرکهای مسکونی انتخاب شد. تلاش شد مجموعهای از صحنهها انتخاب شود که حاوی الگوهای فضایی متنوعی از خانهها باشد. برای هر شهرک مسکونی، مجموعهای از جادههای دسترسی و مجموعهای از جادهها را در نزدیکی شهرک شناسایی کردیم. املاک مسکونی و جاده های مربوطه در هر صحنه با بازدید از مکان مورد نظر یا در صورت عدم امکان با استفاده از اطلاعات معنایی OSM و بررسی مکان مورد نظر با استفاده از نمای خیابان گوگل شناسایی شدند. طبق ویکی OSM، برچسب صحیح برای یک جاده دسترسی استبزرگراه = مسکونی . بسیاری از نویسندگان روشهایی را برای گروهبندی ساختمانها پیشنهاد کردهاند که به طور بالقوه میتوانند برای شناسایی خودکار مناطق مسکونی در OSM استفاده شوند [ 12 ]. شکل 7 یک صحنه نمونه موجود در مجموعه داده ما را نشان می دهد. مجموعه داده به طور تصادفی به بیست صحنه که برای آموزش استفاده شد و چهل صحنه که برای آزمایش مدل ما استفاده شد، تقسیم شد. نتیجه اعمال روش ادغام اشیاء شرح داده شده در بخش 3.1 برای صحنه های آزمایشی در شکل 8 (a,b) به ترتیب در شکل 8 (c,d) نمایش داده شده است.
شکل 8. نتایج ادغام چند ضلعی های ( a ) و ( b ) به ترتیب در ( c ) و ( d ) نمایش داده شده است.
4.2. ارزیابی کیفی
شکل 9 زیرمجموعه ای از صحنه های آزمایش OSM را با مقدار مربوطه در زیر هر زیرشکل فهرست شده نشان می دهد. این زیر مجموعه خاص برای نشان دادن رفتار مدل انتخاب شد. از این شکل مشهود است که در تمام آن صحنههایی که تصور قوی مبنی بر ورود جاده به شهرک وجود دارد ، ارزش بالایی ( ) تعیین میشود. اینها به طور خاص صحنه های شکل 9 هستند (a,c,e,f,i,k). از سوی دیگر مشهود است که به تمام آن صحنه هایی که تصور قوی مبنی بر عدم ورود جاده به شهرک وجود دارد، مقدار کمی ( ) اختصاص داده می شود. اینها به طور خاص صحنه های شکل 9 (b,d,g) هستند.



شکل 9. صحنه های تست OSM با مقادیر مربوطه.
با بررسی شکل 9 (h,j,l) می بینیم که رابطه ای که بین شهرک مسکن و جاده وجود دارد را می توان به صورت خطی و ورودی توصیف کرد. با وجود این واقعیت، مدل پیشنهادی ارزش قابل توجهی برای هر یک از این صحنه ها قائل شد. ما استدلال می کنیم که یک صحنه ممکن است بیش از یک رابطه فضایی واحد را نشان دهد.
مانند همه روابط کیفی، اینترها ممکن است با درجات مختلفی وجود داشته باشند. مشخص نیست که آیا مدل پیشنهادی ورود به دقت میزان وجود این رابطه فضایی را نشان میدهد یا خیر. به عنوان مثال صحنه های شکل 9 (f,l) را در نظر بگیرید که به ترتیب دارای مقادیر و هستند. علیرغم مقدار بسیار بالاتری نسبت به شکل 9 (l) نسبت به شکل 9 (f)، مشخص نیست که رابطه اینترها به میزان بیشتری در شکل 9 (l) وجود داشته باشد. این استدلال می تواند در شکل 9 نیز اعمال شود (ب، د). تعیین اینکه مدل پیشنهادی با چه دقتی میزان وجود رابطه را در یک صحنه معین نشان میدهد، به یک مطالعه رفتاری در مقیاس بزرگ که شامل افراد انسانی میشود، نیاز دارد. به این ترتیب، از حوصله این مقاله خارج است.

 (ب، د). تعیین اینکه مدل پیشنهادی با چه دقتی میزان وجود رابطه را در یک صحنه معین نشان میدهد، به یک مطالعه رفتاری در مقیاس بزرگ که شامل افراد انسانی میشود، نیاز دارد. به این ترتیب، از حوصله این مقاله خارج است.
(ب، د). تعیین اینکه مدل پیشنهادی با چه دقتی میزان وجود رابطه را در یک صحنه معین نشان میدهد، به یک مطالعه رفتاری در مقیاس بزرگ که شامل افراد انسانی میشود، نیاز دارد. به این ترتیب، از حوصله این مقاله خارج است.4.3. طبقه بندی راه دسترسی
برای نشان دادن سودمندی مدل پیشنهادی، دقتی را محاسبه کردیم که با آن میتوان جادهها را در صحنههای آزمایشی به عنوان جادههای دسترسی یا غیردسترسی طبقهبندی کرد. طبقه بندی با استفاده از آستانه انجام شد که با استفاده از مجموعه آموزشی تعیین شد. یعنی یک جاده در صورتی به عنوان جاده دسترسی طبقه بندی می شود که مقدار مربوطه بیشتر از ; در غیر این صورت به عنوان جاده غیر دسترسی طبقه بندی می شد. در مجموعه آزمون دقت طبقه بندی به دست آمد. برای نشان دادن اینکه جاده های دسترسی و غیردسترسی را به گروه های آماری معنی دار تقسیم می کند، تجزیه و تحلیل واریانس نامتعادل (ANOVA) انجام شد [ 60 ]. مشخص شد که گروه ها از نظر آماری معنی دار هستند .



5. نتیجه گیری ها
این اثر نشان دهنده اولین تلاش برای مدل سازی روابط فضایی در حضور مفاهیمی است که در سطوح مختلف در یک سلسله مراتب وجود دارند. به این ترتیب، ما معتقدیم که جهت تحقیقات آینده در این زمینه را نشان می دهد. برخی از جهت گیری های احتمالی تحقیقات آینده شامل موارد زیر است. در ابتدا، در نظر گرفتن سایر روابط فضایی، علاوه بر ورود ، که تابعی از مفاهیمی هستند که در سطوح مختلف وجود دارند ، سودمند خواهد بود . همانطور که در بخش 4.2 مدل سازی بحث شد، رابطه فضایی هم خطی مفید خواهد بود. ادغام روابط چندگانه ممکن است به استفاده از تکنیک هایی برای تشخیص الگوهای فضایی نیز نیاز داشته باشد تا رابطه صحیح در یک مورد خاص اعمال شود [ 61 ]]. برای کارهای آینده جالب است که بررسی کنیم که چگونه سایر عملگرهای تعمیم، علاوه بر ادغام اشیا، می توانند در مدل سازی روابط فضایی نقش ایفا کنند. در نظر گرفتن روابط فضایی بین سایر اشیاء فضایی به جز خانه ها و جاده ها نیز جالب خواهد بود. به عنوان مثال ایستگاه های راه آهن و خطوط راه آهن.
در این کار ما مدل سازی مفاهیم سطح بالاتر را با محاسبه صریح مفاهیم مورد نظر با استفاده از تعمیم نقشه پیشنهاد کردیم. با این حال، همانطور که در بخش 3 بحث شد ، مفاهیم سطح بالاتر نیز ممکن است به طور ضمنی به عنوان مجموعه ای از مفاهیم سطح پایین تر مدل شوند. به عنوان مثال، یک شهرک مسکونی ممکن است به طور ضمنی توسط مجموعهای شامل مجموعه مربوطه از خانهها بدون محاسبه صریح ادغام آنها مدلسازی شود. در کار آینده ما امیدواریم که استفاده از چنین مدل سازی ضمنی مفاهیم سطح بالاتر را بررسی کنیم. ممکن است برخی از مفاهیم سطح بالاتر به طور موثرتر به طور صریح مدل سازی شوند در حالی که برخی دیگر به طور ضمنی به طور موثرتر مدل سازی شوند.
منابع
- مورفی، جی . کتاب بزرگ مفاهیم . مطبوعات MIT: بوستون، MA، ایالات متحده آمریکا، 2002. [ Google Scholar ]
- والتر، وی. لو، اف. تفسیر خودکار نقشه های دیجیتال. ISPRS J. Photogramm. 2011 ، 66 ، 519-528. [ Google Scholar ] [ CrossRef ]
- تریفونا، ن. Egenhofer، MJ سازگاری بین قطعات و مصالح: یک مدل محاسباتی. ترانس. GIS 1997 ، 1 ، 1-3. [ Google Scholar ]
- قیمت، R. تریفونا، ن. جنسن، CS مدلسازی محدودیتهای توپولوژیکی در روابط قسمت-کل فضایی. در مجموعه مقالات بیستمین کنفرانس بین المللی مدل سازی مفهومی: مدل سازی مفهومی، یوکوهاما، ژاپن، 27-30 نوامبر 2001; ص 27-40.
- اگنهوفر، ام. Wilmsen, D. تغییرات در روابط توپولوژیکی هنگام تقسیم و ادغام مناطق. در مجموعه مقالات دوازدهمین سمپوزیوم بین المللی در مورد مدیریت داده های فضایی، وین، اتریش، 12 تا 14 ژوئیه 2006.
- Mackaness، W. ادواردز، جی. اهمیت الگوی مدلسازی و ساختار در تعمیم خودکار نقشه. در مجموعه مقالات کارگاه مشترک در مورد بازنمایی چند مقیاسی داده های فضایی، اتاوا، ON، کانادا، 7-8 ژوئیه 2002.
- Touya, G. فرآیند انتخاب شبکه جاده ای بر اساس غنی سازی داده ها و تشخیص ساختار. ترانس. GIS 2010 ، 14 ، 595-614. [ Google Scholar ] [ CrossRef ]
- وردر، اس. کیلر، بی. Sester, M. تفسیر نیمه خودکار ساختمان ها و مناطق سکونتگاهی در داده های فضایی تولید شده توسط کاربر. در مجموعه مقالات هجدهمین کنفرانس بین المللی SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 2 تا 5 نوامبر 2010. صص 330-339.
- بوتنوت، م. گوسلن، جی. تایدج، م. هیپکه، سی. لیپک، یو. Sester, M. ادغام داده های جغرافیایی ناهمگن در یک پایگاه داده فدرال. ISPRS J. Photogramm. 2007 ، 62 ، 328-346. [ Google Scholar ] [ CrossRef ]
- اندرس، ک. Fritsch, D. تفسیر خودکار نقشه های دیجیتال برای بازنگری داده ها. بین المللی قوس. فتوگرام Remote Sens. 1996 , 31 , 90-94. [ Google Scholar ]
- لوشر، پی. ویبل، آر. Mackaness، W. خانه تراس کجاست؟ در مورد استفاده از هستی شناسی ها برای بازشناسی مفاهیم شهری در پایگاه های کارتوگرافی. در پیشرفت در مدیریت داده های مکانی ; Ruas, A., Gold, C., Eds.; Springer: برلین، آلمان، 2008; صص 449-466. [ Google Scholar ]
- Regnault، N. شناخت خوشه های ساختمانی برای تعمیم. در مجموعه مقالات هفتمین سمپوزیوم بین المللی در مورد مدیریت داده های فضایی، دلفت، هلند، 12-16 اوت 1996. ص 185-198.
- یان، اچ. ویبل، آر. یانگ، ب. یک رویکرد چند پارامتری برای گروهبندی و تعمیم خودکار ساختمان. Geoinformatica 2008 ، 12 ، 73-89. [ Google Scholar ]
- Steinhauer، JH; ویز، تی. فرکسا، سی. Barkowsky، T. شناخت مناطق انتزاعی در نقشه های نقشه برداری. در مجموعه مقالات کنفرانس بین المللی نظریه اطلاعات مکانی: مبانی علم اطلاعات جغرافیایی، Morro Bay، CA، ایالات متحده آمریکا، 19-23 سپتامبر 2001; صص 306-321.
- Qi، HB; Li، ZL رویکردی برای ایجاد گروه بندی بر اساس محدودیت های سلسله مراتبی. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2008 ، XXXVII ، 449-454. [ Google Scholar ]
- ژانگ، ایکس. آی، تی. Stoter, J. خصوصیات و تشخیص الگوهای ساختمانی در داده های نقشه برداری: دو الگوریتم. در پیشرفت در مدیریت داده های مکانی و GIS ; Shi, W., Yeh, A., Leung, Y., Zhou, C., Eds.; Springer: برلین، آلمان، 2012; صص 93-107. [ Google Scholar ]
- کریستف، اس. رواس، الف. تشخیص ترازهای ساختمان برای اهداف تعمیم. در پیشرفت در مدیریت داده های مکانی ; ریچاردسون، دی.، ون اوستروم، پ.، ویرایش. Springer: برلین، آلمان، 2002; صص 419-432. [ Google Scholar ]
- مائو، بی. هری، ال. Ban، Y. تشخیص و نمونهسازی ساختارهای خطی برای تجسم دینامیکی مدلهای شهر سه بعدی. محاسبه کنید. محیط زیست سیستم شهری 2012 ، 36 ، 233-244. [ Google Scholar ] [ CrossRef ]
- لوشر، پی. ویبل، آر. Burghardt، D. ادغام مدلسازی هستیشناختی و استنتاج بیزی برای طبقهبندی الگو در دادههای برداری توپوگرافی. محاسبه کنید. محیط زیست سیستم شهری 2009 ، 33 ، 363-374. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هاونرت، جی. تشخیص تقارن در ساختن ردپای با تطبیق رشته ها. در پیشرفت علم اطلاعات جغرافیایی برای جهانی در حال تغییر . Geertman, S., Reinhardt, W., Toppen, F., Eds. Springer: برلین، آلمان، 2011; صص 319-336. [ Google Scholar ]
- Egenhoger، MJ; Franzosa، روابط فضایی توپولوژیکی مجموعه نقطه RD. بین المللی جی. جئوگر. Inf. سیستم 1991 ، 5 ، 161-174. [ Google Scholar ] [ CrossRef ]
- شریف، ع. اگنهوفر، ام. مارک، دی. روابط فضایی زبان طبیعی بین اشیاء خطی و مساحتی: توپولوژی و متریک اصطلاحات انگلیسی زبان. بین المللی جی. جئوگر. Inf. علمی 1998 ، 12 ، 215-246. [ Google Scholar ]
- هرناندز، دی. بازنمایی کیفی دانش فضایی ; Springer: برلین، آلمان، 1994. [ Google Scholar ]
- Cohn، AG; هزاریکا، SM بازنمایی و استدلال فضایی کیفی: مروری. فاندم به اطلاع رساندن. 2001 ، 46 ، 1-29. [ Google Scholar ]
- Riedemann, C. تطبیق نامها و تعاریف عملگرهای توپولوژیکی. در نظریه اطلاعات مکانی ; Cohn, A., Mark, D., Eds. Springer: برلین، آلمان، 2005; جلد 3693، ص 165–181. [ Google Scholar ]
- کای، جی. وانگ، اچ. MacEachren، A.; Fuhrmann, S. رابط های مکالمه طبیعی به پایگاه های داده های مکانی. ترانس. GIS 2005 ، 9 ، 199-221. [ Google Scholar ] [ CrossRef ]
- Sjoo، K. Jensfelt، P. روابط توپولوژیکی عملکردی برای بازنمایی فضایی کیفی. در مجموعه مقالات کنفرانس بین المللی رباتیک پیشرفته، مونته ویدئو، اروگوئه، 20 تا 23 ژوئن 2011.
- Egenhofer, M. Reasoning about Binary Topological Relations. در مجموعه مقالات دومین سمپوزیوم بین المللی پیشرفت در پایگاه های داده فضایی، زوریخ، سوئیس، 28 تا 30 اوت 1991. صص 143-160.
- Egenhofer، M. یک سیستم مرجع برای روابط توپولوژیکی بین اشیاء فضایی مرکب. در پیشرفت در مدل سازی مفهومی – دیدگاه های چالش برانگیز ; Heuser, C., Pernul, G., Eds. Springer: برلین، آلمان، 2009; جلد 5833، ص 307–316. [ Google Scholar ]
- راندل، دی. کوی، ز. Cohn، A. یک منطق فضایی مبتنی بر مناطق و اتصال. در مجموعه مقالات کنفرانس بین المللی بازنمایی دانش و استدلال، کمبریج، MA، ایالات متحده آمریکا، 16-29 اکتبر 1992; 92، صص 165-176.
- کناف، م. راوه، آر. رنز، جی. ارزیابی شناختی روابط فضایی توپولوژیکی: نتایج یک تحقیق تجربی. در نظریه اطلاعات مکانی مبنای نظری برای GIS ; هیرتل، اس.، فرانک، ا.، ویرایش. Springer: برلین، آلمان، 1997; جلد 1329، ص 193–206. [ Google Scholar ]
- رنز، جی. راوه، آر. Knauff، M. به سوی کفایت شناختی روابط فضایی توپولوژیکی. در شناخت فضایی II، ادغام نظریه های انتزاعی، مطالعات تجربی، روش های رسمی، و کاربردهای عملی . Springer-Verlag: لندن، انگلستان، 2000; ص 184-197. [ Google Scholar ]
- کلیپل، الف. تئوری اطلاعات فضایی با تفکر فضایی ملاقات می کند – آیا توپولوژی سنگ روزتای شناخت فضایی است؟ ان دانشیار صبح. Geogr. 2012 . [ Google Scholar ] [ CrossRef ]
- مارک، دی. Egenhofer، M. مدل سازی روابط فضایی بین خطوط و مناطق: ترکیب مدل های ریاضی رسمی و آزمایش موضوعات انسانی. کارتوگر. Geogr. Inf. سیستم 1994 ، 21 ، 195-212. [ Google Scholar ]
- اگنهوفر، ام. مارک، دی. جغرافیای ساده لوحانه. در نظریه اطلاعات مکانی مبنای نظری برای GIS ; Frank, A., Kuhn, W., Eds.; Springer: برلین، آلمان، 1995; جلد 988، ص 1-15. [ Google Scholar ]
- کلمنتینی، ای. دی فلیس، پی. van Oosterom, P. مجموعه کوچکی از روابط توپولوژیکی رسمی مناسب برای تعامل با کاربر نهایی. در پیشرفت در پایگاه داده های فضایی ; Abel, D., Chin Ooi, B., Eds. Springer: برلین، آلمان، 1993; جلد 692، ص 277–295. [ Google Scholar ]
- کای، جی. وانگ، اچ. مک ایچرن، الف. ارتباط مفاهیم فضایی مبهم در تعاملات انسان-GIS: رویکرد گفتگوی مشارکتی. در نظریه اطلاعات مکانی. مبانی علم اطلاعات جغرافیایی ; Kuhn, W., Worboys, M., Timpf, S., Eds. Springer: برلین، آلمان، 2003. [ Google Scholar ]
- Zhan، FB یک مدل مجموعه فازی از اصطلاحات زبانی تقریبی در توصیف روابط توپولوژیکی دودویی بین مناطق ساده. در کاربرد محاسبات نرم در تعریف روابط فضایی ; Matsakis, P., Sztandera, LM, Eds. Physica-Verlag GmbH: هایدلبرگ، آلمان، 2002; صص 179-202. [ Google Scholar ]
- بلوخ، آی. کولیوت، او. سزار، RM، جونیور در رابطه فضایی سه تایی “بین”. IEEE Trans. سیستم مرد سایبرن. بی سایبرن. 2006 ، 36 ، 312-327. [ Google Scholar ] [ CrossRef ]
- Raubal, M. مهندسی شناختی برای علم اطلاعات جغرافیایی. Geogr. Compass 2009 , 3 , 1087-1104. [ Google Scholar ] [ CrossRef ]
- سارجاکوسکی، ال. فصل 2 مدل های مفهومی تعمیم و بازنمایی چندگانه. در تعمیم اطلاعات جغرافیایی ; Mackaness, W., Ruas, A., Sarjakoski, L., Eds.; Elsevier Science BV: آمستردام، هلند، 2007; صص 11-35. [ Google Scholar ]
- Weibel, R. تعمیم داده های مکانی: اصول و الگوریتم های منتخب. در مبانی الگوریتمی سیستم های اطلاعات جغرافیایی ; van Kreveld, M., Nievergelt, J., Roos, T., Widmayer, P., Eds. Springer: برلین، آلمان، 1997; جلد 1340، صص 99–152. [ Google Scholar ]
- Mackaness، WA تعمیم اطلاعات جغرافیایی: مدل سازی نقشه برداری و کاربردها ; Mackaness, WA, Ruas, A., Sarjakoski, LT, Eds. Elsevier Science BV: آمستردام، هلند، 2007. [ Google Scholar ]
- جونز، CB; ور، JM Map تعمیم در عصر وب. بین المللی جی. جئوگر. Inf. علمی 2005 ، 19 ، 859-870. [ Google Scholar ] [ CrossRef ]
- Weibel, R. A Tipology of Constraints to Line Simplification. در مجموعه مقالات هفتمین سمپوزیوم بین المللی در مورد مدیریت داده های فضایی، دلفت، هلند، 12 تا 16 اوت 1996. صص 533-546.
- رگنولد، ن. Revell, P. ادغام خودکار ساختمانها برای تولید نقشه های مهمات نقشه برداری در مقیاس 1:50000. کارتوگر. J. 2007 , 44 , 239-250. [ Google Scholar ] [ CrossRef ]
- هاونرت، جی. Wolff، A. ساده سازی بهینه و ایمن از نظر توپولوژیکی ردپای ساختمان. در مجموعه مقالات هجدهمین کنفرانس بین المللی SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 2 تا 5 نوامبر 2010. صص 192-201.
- کیلر، بی. هاونرت، جی. Sester، M. استخراج ماتریس های انتقال مقیاس از نمونه های نقشه برای تجمع مبتنی بر بازپخت شبیه سازی شده. ان GIS 2009 ، 15 ، 107-116. [ Google Scholar ] [ CrossRef ]
- هاونرت، جی. ولف، الف. تجمیع مساحت در تعمیم نقشه با برنامه نویسی عدد صحیح مختلط. بین المللی جی. جئوگر. Inf. علمی 2010 ، 24 ، 1871-1897. [ Google Scholar ] [ CrossRef ]
- کورکوران، پ. مونی، پی. Winstanley، AC Planar و غیر مسطح نقشه برداری سازگار توپولوژیکی. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 1659-1680. [ Google Scholar ] [ CrossRef ]
- جونز، CB سیستم های اطلاعات جغرافیایی و کارتوگرافی کامپیوتری ; Prentice Hall: Upper Saddle River، نیوجرسی، ایالات متحده آمریکا، 1997. [ Google Scholar ]
- رگنولد، ن. مک مستر، آر. دیدگاه تلفیقی از عملگرهای تعمیم. در تعمیم اطلاعات جغرافیایی ; Mackaness, W., Ruas, A., Sarjakoski, L., Eds.; Elsevier Science BV: آمستردام، هلند، 2007; صص 37-66. [ Google Scholar ]
- Regnauld، N. الگوریتمهای ادغام دادههای توپوگرافی. در مجموعه مقالات بیست و یکمین کنفرانس بین المللی کارتوگرافی، دوربان، آفریقای جنوبی، 10-16 اوت 2003.
- ور، ج. جونز، سی. باندی، جی. مدل فضایی مثلثی برای تعمیم نقشه برداری اشیاء مساحتی. در نظریه اطلاعات مکانی مبنای نظری برای GIS ; Frank, A., Kuhn, W., Eds.; Springer-Verlag: برلین، آلمان، 1995; جلد 988، صص 173–192. [ Google Scholar ]
- یانگ، ال. ژانگ، ال. ما، جی. زی، جی. لیو، ال. تجسم تعاملی مدلهای ساختمان شهری با وضوح چندگانه با در نظر گرفتن شناخت فضایی. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 5-24. [ Google Scholar ] [ CrossRef ]
- لی، ز. یان، اچ. آی، تی. چن، جی. تعمیم خودکار ساختمان بر اساس مورفولوژی شهری و نظریه گشتالت. بین المللی جی. جئوگر. Inf. علمی 2004 ، 18 ، 513-534. [ Google Scholar ] [ CrossRef ]
- دیمن، جی. ون کرولد، ام. Spaan، B. تعمیم ساختمان با کیفیت بالا با گسترش عملگرهای مورفولوژیکی. در مجموعه مقالات کارگاه ICA در مورد تعمیم، مونپلیه، فرانسه، 20-21 ژوئن 2008.
- دوپنویس، ام. گالتون، الف. تخصیص ردپای به مجموعه نقطه: یک بررسی تحلیلی. در نظریه اطلاعات مکانی ; Hornsby, K., Claraunt, C., Denis, M., Ligozat, G., Eds. Springer: برلین، آلمان، 2009; جلد 5756، ص 227–244. [ Google Scholar ]
- Goodchild، M. شهروندان به عنوان حسگرها: دنیای جغرافیای داوطلبانه. ژئوژورنال 2007 ، 69 ، 211-221. [ Google Scholar ] [ CrossRef ]
- دی گروت، ام. Schervish, M. Probability and Statistics , 4th ed; پیرسون: لندن، بریتانیا، 2011. [ Google Scholar ]
- ژانگ، ایکس. آی، تی. استوتر، جی. کراک، ام. Molenaar, M. تشخیص الگوی ساختمان در داده های توپوگرافی: نمونه هایی در ترازهای خطی و منحنی. GeoInformatica 2013 ، در دست چاپ. [ Google Scholar ]
© 2012 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/3.0/) توزیع شده است
بدون نظر