

چکیده
:مدلسازی، تحلیل و تجسم پدیدههای جغرافیایی پویا به عنوان یک چالش کلیدی توسعه برای نسل بعدی سیستمهای اطلاعات جغرافیایی (GIS) شناسایی شدهاست. در این زمینه، توسعههای پارادایمی پیشبینیشده برای فناوری GIS بنیادی معاصر، سؤالات اساسی در مورد روشهای هستیشناختی، بازنمایی رسمی و (تحلیلی) محاسباتی که زیربنای زیربنای نظری اطلاعات مکانی آنها را تشکیل میدهند، ایجاد میکند. ما نمای کلی و معماری مفهومی را برای توسعه قابلیتهای تحلیلی معنایی و کیفی سطح بالا برای حوزههای جغرافیایی پویا ارائه میکنیم. با تکیه بر روشهای رسمی در زمینههای استدلال عقل سلیم، استدلال کیفی، بازنمایی و استدلال مکانی و زمانی، استدلال درباره اعمال و تغییر و مدلهای محاسباتی روایت، ما چالشهای نظری و عملی مشخصی را شناسایی میکنیم که در زمینه استدلال رسمی درباره فضا، رویدادها، کنشها و تغییر به وجود میآیند. با این به عنوان پایه و در پسزمینه یک سناریوی مصور که شامل پویاییهای مکانی-زمانی روایتهای شهری است، به مشکلات خاص و تکنیکهای راهحل که عمدتاً شامل انتزاع کیفی، ادغام دادهها و سازگاری فضایی و ربودن مکانی عملی است میپردازیم.
1. مقدمه
سیستم های اطلاعات جغرافیایی (GIS) با مقادیر انبوهی از داده های مکانی-زمانی در سطح خرد و کلان مواجه هستند. در سیستمهای GIS مرسوم، این دادهها به شکل پایگاههای داده مکانی-زمانی از اندازهگیریهای دقیق مربوط به ویژگیهای محیطی، تصاویر هوایی و اخیراً پایگاههای داده شبکه حسگر است که اطلاعات بلادرنگ درباره فرآیندها و پدیدههای طبیعی و مصنوعی را ذخیره میکند. در سیستمهای GIS نسل بعدی، روشهای نظری اطلاعات بنیادی برای دستخوش تحولات اساسی پیشبینی میشوند: موجودیتهای هستیشناختی سطح بالا، مانند اشیا ، رویدادها ، کنشها و فرآیندها .; و انتظار میرود که قابلیت مدلسازی و استدلال در مورد آنها ویژگی بومی نسل بعدی GIS باشد. در واقع، یکی از اهداف توسعه حیاتی در سیستمهای GIS آینده، یک تغییر پارادایمیک اساسی در “انفورماتیک فضایی” زیربنایی این سیستمها است.
1.1. زمان و GIS
ادغام زمان با GIS برای توسعه GIS که قادر به نظارت و تجزیه و تحلیل حالت های متوالی موجودیت های فضایی باشد، ضروری است [ 1-3 ] . چنین قابلیتی که مستلزم نمایش نمونههای موجودات جغرافیایی و تغییر آنها در طول زمان به جای تغییر به لایهها یا صحنهها است، آینده GIS است و در سازمان ملی تصویربرداری و نقشهبرداری (نیما؛ اکنون آژانس ملی اطلاعات مکانی زمین) مورد تاکید قرار گرفته است. (NGA)) چشم انداز کتابخانه های اطلاعاتی یکپارچه [ 4 ]. یک GIS زمانی (TGIS) باید علاوه بر محاسبه تغییرات مکانی، رویدادهای پشت تغییرات و حقایقی را که مشاهده این تغییرات را امکان پذیر میسازد، در نظر بگیرد [ 5 ]. به قول کلارامونت و تریو [ 1]:
برای پاسخگویی مناسب به نیازهای علمی، یک TGIS باید صریحاً پیوندهای شناخته شده بین رویدادها و پیامدهای آنها را حفظ کند. روابط مشاهده شده باید مورد توجه قرار گیرد (به عنوان مثال، موجودیت های A و B موجودیت C را ایجاد می کنند) تا به دانشمندان کمک کند مدل هایی را توسعه دهند که پویایی فرآیندهای مکانی-زمانی را بازتولید کنند. بنابراین محققان میتوانند روابط پیچیده را مطالعه کنند، نتیجهگیری کنند و پیوندهای علّی را تأیید کنند که موجودیتها را از طریق فرآیندهای نفوذ و دگرگونی به هم مرتبط میکند.»
واضح است که این تسهیلات مستلزم یک رویکرد رسمی شامل رویدادها، اقدامات و اثرات آنها در جهت بازنمایی و استدلال در مورد تغییرات پویا فضایی است. چنین رویکردی در کاربردهای GIS مربوط به تجزیه و تحلیل گذشتهنگر یا تشخیص تغییرات فضایی مشاهدهشده شامل تجزیه و تحلیل سطح شی در مقیاس خوب یا تجزیه و تحلیل سطح کلان (جمع) پدیدههای جغرافیایی پویا سودمند خواهد بود. به عنوان مثال، در GIS، تغییرات فضایی می تواند نشان دهنده تغییرات (محیط زیستی) در حوزه جغرافیایی در یک دانه بندی زمانی خاص باشد و می تواند ارتباط قابل توجهی با رویدادهای طبیعی و اقدامات انسانی داشته باشد، به عنوان مثال، تغییرات در کاربری زمین، پوشش گیاهی، تغییرات خوشه ای در بین دانه ها. ویژگی های جمعیتی و الگوهای مهاجرت حیات وحش
1.2. معناشناسی جغرافیایی
مدلهای مفهومی برای نمایش رویدادها و فرآیندهای جغرافیایی به طور کلی کانون تلاشهای تحقیقاتی گسترده در دهه گذشته بوده است. تحقیقات در زمینه معناشناسی جغرافیایی، طبقه بندی رویدادها و فرآیندهای جغرافیایی و تحقیقات هستی شناسی اساسی در مورد ماهیت فرآیندها در یک زمینه جغرافیایی خاص، توجه خاصی را از چندین طرف به خود جلب کرده است [ 6-9 ] . جنبههای معرفتشناختی بنیادی مربوط به، بهعنوان مثال، هویت رویداد و ابژه مورد توجه ویژهای در جامعه قرار گرفته است [ 10 ، 11 ]]. این امر عمدتاً با درک این موضوع تحریک شده است که GIS زمانی صرفاً مبتنی بر عکس فوری، مبنای مناسبی برای تجزیه و تحلیل رویدادها و فرآیندهای مکانی و انجام استدلال مکانی-زمانی فراهم نمی کند. استدلال مبتنی بر رویداد و سطح شی در سطح فضایی می تواند به عنوان پایه ای برای تحلیل های توضیحی در یک GIS عمل کند [ 12-15 ] . به عنوان مثال، یک مکانیسم استدلال مفید که برنامهها ممکن است از آن بهره ببرند، میتواند وظیفه تبیین علی باشد، که فرآیند تحلیل گذشتهنگر با استخراج یک مدل توضیحی مبتنی بر رویداد از دادههای فضایی موجود است. در واقع، توضیح اساساً یک تاریخچه مبتنی بر رویداد از پدیدههای فضایی مشاهدهشده است که هم بر حسب رخدادهای مستقل و هم وابسته به حوزه تعریف میشوند.
1.3. روایت به عنوان مدلی از ایجاد حس ادراکی
محققان در منطق محاسباتی کنش و تغییر، روایات را به روشهای مختلفی تفسیر کردهاند (مثلاً در چارچوب فرمالیسمها، مانند حساب موقعیت و حساب رویداد) [ 16-20 ] :
” توالی از رویدادهایی که ممکن است اطلاعات ناقص، متناقض یا نادرست در مورد آنها داشته باشیم “
گزارشهای مجموعهای از رویدادها، که لزوماً بهعنوان توالی ارائه نمیشوند. یک روایت روایتی از آنچه اتفاق افتاده است
اهمیت روایات در گفتمان روزمره، تفسیر، تعامل، شکلگیری باور و تصمیمگیری در گسترهای از رشتههای علمی، انسانی و هنری مورد تأیید و بررسی قرار گرفته است. روایت ادراکات روزمره توسط انسان ها، و اهمیت روایت ها، به عنوان مثال، در ارتباطات و تعامل، تحت چندین چارچوب و از طریق چندین ابتکار میان رشته ای شامل هنر، علوم انسانی و علوم اجتماعی، به عنوان مثال، پارادایم روایت [ 21 ]، روایت، بررسی شده است. تحلیل [ 22 ] ، روایت شناسی [23-25 ] ، تحلیل گفتمان و روایت شناسی محاسباتی [ 26-29 ] .
ما روایتها و فرآیندهای سطح بالای روایتسازی (محاسباتی) را که از آن سرچشمه میگیرند، بهعنوان یک ساختار زیربنایی کلی در نظر میگیریم که کارکرد حیاتی حسسازی ادراکی را انجام میدهد، به عنوان مثال ، به عنوان پیوندی بین حس ادراکی خاص مسئله ( یعنی دادهها) و (محاسباتی) ) شکل گیری برداشت های معقول مربوط به تفسیر و وظایف تحلیلی. شکل خاص ساختار روایت پیشنهادی، مدل محاسباتی الهام گرفته شده از روایت است که شامل استدلال عقل سلیم سطح بالا با فضا، رویدادها، اعمال، تغییر و تعامل است [ 30 ]. ما معتقدیم که روایت محاسباتی مربوط به فضا، اعمال و تغییر مدل مفیدی از بصری وتفکر مکانی-زمانی در طیف گسترده ای از وظایف حل مسئله و حوزه های کاربردی، با پویایی جغرافیایی که تمرکز این مقاله است.
بنابراین، مدلهای محاسباتی روایتهای جغرافیایی، بنا به تعریف، با هدف درک مقادیر عظیم دادههای مکانی-زمانی در سطح خرد و کلان مربوط به فرآیندهای زیستمحیطی، اجتماعی-اقتصادی و جمعیتشناختی در یک زمینه جغرافیایی هستند. چنین روایتهایی بر اساس پایگاههای اطلاعاتی مکانی-زمانی اندازهگیریهای دقیق در مورد ویژگیهای محیطی، تصاویر هوایی، پایگاههای داده شبکه حسگر با اطلاعات بلادرنگ درباره فرآیندها و پدیدههای طبیعی و مصنوعی و غیره ساخته میشوند . روایتهای جغرافیایی معمولاً یک افق زمانی را در بر میگیرند که تغییرات نسلی را در بر میگیرد، اما اینها همچنین میتوانند به مقیاس روزمره «زندگی در شهر»، فرآیندهای طبیعی محیطی و غیره مربوط باشند.
1.4. روایات و تفسیر تحلیلی سطح بالا در GIS
هدف اصلی توسعه برای ساخت یک دستگاه نمایشی و محاسباتی روایت محور برای نسل بعدی GIS در واقع با هدف درک مقادیر عظیمی از داده های جغرافیایی است. این باید به منظور توانمندسازی تحلیلگران و تصمیم گیرندگان در تمام سطوح سلسله مراتب سیاسی اجتماعی و اقتصادی در حوزه های عمومی و خصوصی انجام شود.
پیشرفت در روشهای رسمی در زمینههای استدلال عقل سلیم، بازنمایی و استدلال کیفی مکانی-زمانی، استدلال در مورد فضا، اعمال و تغییر و پویایی مکانی-زمانی [30-32 ] دیدگاههای جدید جالبی را برای توسعه انفورماتیک فضایی بنیادی در زیربنای بعدی ارائه میکند. سیستم های GIS نسل الزامات اساسی در این سیستم ها عبارتند از:
- مهندسی دانش، معناشناسی و مدلسازی : معرفی قابلیت گنجاندن انتزاعات مبتنی بر شی، رویداد و فرآیند از پدیدههای مکانی-زمانی بهعنوان موجودیتهای بومی و درجه یک، همراه با خصوصیات معنایی غنی در هستیشناسی و مدل مفهومی GIS. سیستم به گونه ای که در بین سیستم ها و پیاده سازی ها قابل اجرا باشد.
- استدلال تحلیلی : از دیدگاه محاسباتی، مکانیسمهای استدلال سطح بالا عمومی که بر معنایی ویژگیهای مدلسازی شده رسمی یا بدیهی جنبههای مستقل و وابسته به حوزه تأثیر میگذارند، ضروری هستند. این مکانیسمها میتوانند برای زمینهسازی و مدلسازی پدیدههای محیطی (طبیعی و انسانی) از حوزههایی مانند اپیدمیولوژی، پویایی شهری، پایش پوشش گیاهی، زیستشناسی حیات وحش، پویایی حملونقل، میراث فرهنگی و غیره استفاده شوند (بخش 2.1).
در واقع، انتظار میرود که این تواناییهای بازنمایی دانش و استدلال، مبنایی برای وظایف تحلیلی و تصمیمگیری در سطح بالا، چه بهصورت فردی یا همراه با سایر اشکال تکنیکهای تحلیلی از حوزه آمار فضایی یا تجزیه و تحلیل کمی در GIS، فراهم کند.
1.5. مشارکت و سازماندهی مقاله
هدف این مقاله آوردن روشهای رسمی در مورد بازنمایی و استدلال دانش (KR) به حوزه سیستمهای اطلاعات جغرافیایی است. در این زمینه، و با تمرکز ویژه بر استفاده از روشهای استدلال رسمی مبتنی بر KR، این مقاله:
- نمایش اساسی و چالش های محاسباتی مربوط به فضا، اقدامات و تغییر را نشان می دهد
- یک چارچوب کلی برای مدلسازی سطح بالا و تحلیل (توضیحی) برای حوزه جغرافیایی و فضایی ارائه میکند.
- به مشکلات نمایشی و محاسباتی ملموسی که در این زمینه ایجاد میشوند میپردازد و یک نمای واحد از یک معماری تلفیقی را در پسزمینه یک سناریوی کاربردی مصور از حوزه پویایی شهری ارائه میدهد.
مقاله بصورت زیر مرتب شده است:
- بخش 2 دیدگاههای مبتنی بر کاربرد را از چندین حوزه ارائه میکند، که در آن مفهوم دینامیک جغرافیایی به عنوان کاربردی شناخته میشود. ما همچنین دو سناریوی محرک مشخص در مورد پویایی مکانی-زمانی روایتهای شهری ارائه میکنیم.
- بخش 3 مروری مختصر از روشهای رسمی در عقل سلیم، بازنمایی فضایی کیفی و استدلال ارائه میکند و ممکن است توسط خوانندگان آشنا با موضوع نادیده گرفته شود.
- بخش 4 مروری شهودی از انفورماتیک فضایی اصلی – چالشهای بازنمایی و محاسباتی – را ارائه میکند که در حین مدلسازی و استدلال با پدیدههای جغرافیایی پویا به وجود میآیند.
- بخش 5 انفورماتیک فضایی پویا را با استفاده از یک چارچوب تلفیقی توصیف میکند: ما معماری کلی و اجزای آن را با استفاده از یک مثال در حال اجرا توصیف میکنیم و نشان میدهیم که چگونه چالشهای بازنمایی و محاسباتی اساسی ممکن است در تئوری رسمی فضا، رویدادها، کنشها و تغییر برآورده شوند. .
- بخش 6 مقاله را با بحث در مورد دیدگاه تحقیق ما و خلاصه ای از مشارکت ها به پایان می رساند.
2. دینامیک جغرافیایی: دیدگاه های کاربردی
در سالهای اخیر، مدلسازی و تحلیل پدیدههای جغرافیایی پویا و ادغام زمان در GIS بهعنوان موضوعات اصلی تحقیقاتی در جامعه GIS مطرح شده است. اگرچه، در حال حاضر، دستگاه بازنمایی و تحلیلی برای بررسی پویایی چنین پدیدههایی در بهترین حالت نوپا است، این موضوع به عنوان یک اولویت تحقیقاتی عمده در GIS در نظر گرفته شده است [ 33 ].
در اینجا، ما به طور خلاصه طیف منتخبی از حوزهها را نشان میدهیم که در آن مفهوم پویایی جغرافیایی قابل استفاده است و همچنین سناریوهای انگیزشی را از حوزه پویایی شهری و توسعه محیطی ارائه میکنیم.
2.1. حوزه های کاربرد
طیف گسترده ای از حوزه های اولویت دار که در آن توانایی تحلیلی در سطح بالا بسیار مهم است، به چشم می خورد:
- ◄ اپیدمیولوژی _ این یک دامنه کاربردی کلاسیک است که از منظر فضایی، شامل مطالعه فرآیندهای انتشاری (به عنوان مثال، گسترش بیماری) با موجودیتهای نقطهمحور یا مجموع در فضا و زمان است.
- ◄ تجزیه و تحلیل داده های متحرک . این حوزه شامل تجزیه و تحلیل داده های حرکتی (معمولاً مردم محور) برای اهداف پیش بینی و توضیح است. به عنوان مثال، مطالعات مربوط به وسایل نقلیه / مسیر افراد، داده های حمل و نقل، آمار جرم و جنایت توجه قابل توجهی را در این زمینه پیدا کرده است.
- ◄ تجزیه و تحلیل کاربری زمین این مربوط به تجزیه و تحلیل الگوهای کاربری زمین، به عنوان مثال، در مناطق شهری، بر اساس سنجش از دور و دیگر داده های زمینی است. به عنوان مثال، یک هدف در اینجا می تواند مطالعه ماهیت پویایی کاربری زمین باشد، چه با هم یا به صورت مجزا با داده های مربوط به ابعاد اجتماعی-اقتصادی.
- ◄ مدیریت بلایا این مربوط به فنآوریهای کمکی است که قابلیتهای مدیریتی و تحلیلی را هم قبل/بعد و هم در زمان بلایای طبیعی و انسانساز (مانند آتشسوزی، سیل، طوفان، گردباد، رانش زمین، زلزله) ارائه میکنند.
- ◄ مدلسازی محیطی ، زیست شناسی حیات وحش. این حوزهها شامل مدلسازی و تحلیل پدیدههای زیستمحیطی در سطح اکولوژیکی، به عنوان مثال، سیستمها و روابط یکپارچه شامل گیاهان و جانوران است. مطالعات معمولی شامل نظارت بر پوشش گیاهی (به عنوان مثال، جنگلداری / جنگل زدایی)، تغییرات آب و هوایی (به عنوان مثال، یخچال های طبیعی، تغییر سطح دریا) و نظارت بر آلودگی، خاک، کیفیت هوا، کیفیت آب و غیره است.
- ◄ باستان شناسی، میراث فرهنگی . فناوری GIS توسط باستان شناسان برای بازسازی وقایع و تحولات تاریخی و همچنین برای پیش بینی مکان های بالقوه باستان شناسی مورد استفاده قرار می گیرد. سوابق باستان شناسی حاصل در قالب پورتال های میراث فرهنگی در دسترس عموم قرار می گیرد. برای تسهیل دسترسی شهودی به اطلاعات میراث فرهنگی، به عنوان مثال، توسط گردشگران، یک هستی شناسی مکانی-زمانی از تغییرات در مناطق سیاسی و اداری مورد نیاز است.
2.2. دینامیک شهری: مدلها، معیارها و ابزارها
ما در اینجا حوزه پویایی شهری را مشخص می کنیم، زیرا به عنوان دامنه کاربردی نمونه ای است که در این مقاله برای نشان دادن رویکرد و چارچوب مفهومی خود انتخاب کرده ایم. مدلهای توسعه و رشد شهری برای دههها، عمدتاً تحت نظر یک شهر به عنوان یک سیستم پیچیده، طراحی و بررسی شدهاند. این تحقیق شامل شبیهسازی و مدلسازی دینامیک شهری با استفاده از روشهای محاسباتی، مانند اتوماتای سلولی (به عنوان مثال، [ 34-36 ]) برای شبیهسازی فرآیندهای انتشار و سیستمهای چند عاملی (بهعنوان مثال، [ 37 ] ) ، بهویژه برای شبیهسازی حرکت است. حمل و نقل و رفتار انسانی در سطح فردی و جمعی (نگاه کنید به [ 37 , 38 )] برای مرور کلی). نقش محیط در سیستمهای چند عاملی میتواند متنوع باشد، از جمله محدود به پشتیبانی از حرکت عوامل، منبعی برای عواملی که برای تسهیل اقدامات استفاده میشود، یا اینکه یک سیستم پیچیده با پویایی خاص خود است که به طور بالقوه توسط خود عوامل شکل میگیرد [ 37 ]. ]. رویکردهای مدلسازی شهری در سیستمهای GIS سنتی ادغام شدهاند، و بالعکس، ویژگیهای GIS در بستههای مدلسازی شهری گنجانده شدهاند (به عنوان مثال، [ 39 ] را ببینید).
علیرغم پیشرفت عمده در توسعه مدلها، معیارها و ابزارهای نرمافزاری برای مدلسازی و شبیهسازی شهری و محیطی جغرافیایی، ادغام و کاربرد مدلهای پیشرفته کاربری زمین و شبیهسازی در فرآیند برنامهریزی (شهری) مشکلساز بوده است [ 40 ، 41 ]. ]. همانطور که بریاسولیس [ 40 ] در زمینه نظریهپردازی و مدلسازی استفاده از زمین، و سیاستگذاری و برنامهریزی تأکید میکند:
“تغییراتی که از اواخر دهه 1980 رخ داده است …، به دور از تفکر “کلاسیک” (اثبات گرایی، تقلیل گرایی، و جهان بینی های خطی و ایستا) و به سمت تفکر سیستمی (CS) (معرفت شناسی های جایگزین، کل گرایی، و جهان بینی های غیرخطی و پویا). )”
تمرکز اصلی در زمینه مدلسازی دینامیک شهری (مثلاً برای برنامهریزی) بر روی مدلهای شبیهسازی پیشبینی کمی دادهمحور با ابزارهای محاسباتی قدرتمند بوده است. استیونز و همکاران [ 42 ] توسعه iCity، ابزاری برای مدلسازی پیشبینی رشد شهری و تغییر کاربری زمین در کمک به تصمیمگیری فضایی برای برنامهریزی شهری. روش اساسی آنها یک اتوماتای سلولی سنتی (CA) را با یک CA نامنظم با تأکید اصلی بر تسهیل اجرای منطق مدل و اجرای مدل برای شبیهسازی رشد شهری گسترش میدهد. ورمیرن و همکاران [ 43] یک مدل رگرسیون لجستیک صریح فضایی برای پیشبینی سناریوهای شهری آینده، به ویژه با تمرکز بر پیشبینی الگوهای پیشبینی رشد شهری بر اساس شاخصهای موجود کمیسازی شده از دادهها، مانند LANDSATimagery، پیشنهاد میکند. ارسنجانی و همکاران [ 44 ] عملکرد مدل رگرسیون لجستیک استاندارد را با یک مدل ترکیبی متشکل از رگرسیون لجستیک، زنجیره مارکوف (MC) و اتوماتای سلولی (CA) گسترش میدهد. این مدل میتواند برای شبیهسازی و پیشبینی حالتهای مکانی-زمانی کاربری زمین ساخته شده استفاده شود. راماچاندرا و همکاران [ 45] پویایی شهری را با استفاده از دادههای سنجش از دور زمانی با کمک معیارهای منظر به خوبی تثبیت شده، کمی کنید. اندازه گیری آنتروپی شانون، تراکم جمعیت نشان دهنده سطح شهرنشینی در سطوح محلی، معیارهای چشم انداز ارائه دانش دقیق در مورد پراکندگی و تجزیه و تحلیل مؤلفه اصلی برای اولویت بندی معیارها برای تجزیه و تحلیل دقیق استفاده شده است. کنگ و همکاران [ 46 ] یک مدل بالقوه رشد شهری را با ترکیب معیارهای فضایی با هدف ارائه اسناد پشتیبان تصمیم برای برنامهریزان شهری و ذینفعان با اطلاعات صریح فضایی برای برنامهریزیها و برنامههای نظارتی آینده، توسعه داده و اعمال کنید.
ون کوون و همکاران [ 47 ] پیوند مدل های شبیه سازی پیشرفته با ابزارهای انعطاف پذیر و ساده برای سیاست گذاری را پیشنهاد می کند. ون کوون و همکاران [ 47 ] کار خود را بر این فرضیه استوار میکنند که مدلهای شبیهسازی پیشرفته ارزش تحلیلی بالایی را ارائه میکنند (به قیمت قابل درک بودن توسط سیاستگذاران)، در حالی که روشهای ساده (در مورد آنها، یک ابزار نقشهبرداری شناختی کیفی) به حفظ قابلیت درک کمک میکنند. وبر [ 48] یک مدل تعاملی برای درک روابط متقابل بین سیستم های اجتماعی و فضایی اعمال می کند. این روش شامل مشاهده، کمیسازی و مدلسازی اثرات اشکال فضایی شهری بر سیستمهای اجتماعی و در مقابل، اثرات پویایی اجتماعی بر محیط شهری فضایی است. مدل تعامل ممکن است در یک سیستم GIS ادغام شود، که اجازه می دهد روابط مشترک و ارتباط بین اطلاعات موجود در لایه های مختلف وجود داشته باشد (به عنوان مثال، چنین مدلی می تواند با یک شی و دیدگاه مبتنی بر رویداد از پدیده های جغرافیایی پویا به شیوه ای تعامل داشته باشد. در این مقاله پیشنهاد شده است).
چنین تغییرات پارادایمی در مدلسازی محیطی و تفکر شبیهسازی، و با وجود فناوریها، هنوز نمیتوان تعیین کرد که کدام رویکرد برتر است [ 40 ]. تا آنجایی که به مقدمات اساسی مربوط می شود، انگیزه پیشنهاد اصلی این تحقیق با انگیزه ون کوون و همکارانش طنین انداز شد . [ 47 ]، وبر [ 48]؛ چارچوب تحلیل عقل سلیم مبتنی بر روایت سطح بالا ما با هدف هم افزایی با سایر مدلها و معیارهای کمی هدایتشده برای درک مردممحور از پویاییهای مکانی شهری است. هدف مدل ما تفسیر از دادههای مکانی در مقیاس بزرگ است و تحلیل پیشبینی بخشی از چارچوب ما نیست. با این حال، ما پیشنهاد میکنیم که تجزیه و تحلیل معنایی و کیفی دادهها نمیتواند تنها بینشهای مفیدی را برای مدلهای شبیهسازی مبتنی بر کمی ارائه دهد، بلکه میتواند دارایی ارزشمندی در دست متخصصان و تحلیلگران انسانی درگیر در برنامهریزی و شکلگیری سیاست باشد.
2.3. روایات شهری و پویایی مکانی-زمانی آنها: یک مثال
شهرنشینی و روایت های سطح بالا از پویایی شهری را می توان با توجه به مجموع طیف وسیعی از فرآیندهای جمعیت شناختی، محیطی (طبیعی و مصنوعی)، جامعه شناختی و اقتصادی تفسیر کرد. در واقع، پویایی شهری، و «روایت شهری» ممکن است بهعنوان این موضوع بهطور دقیق تلقی نشود، اما برای بحث حاضر، این تفسیر کافی است.
شهرنشینی بیش از 28 سال
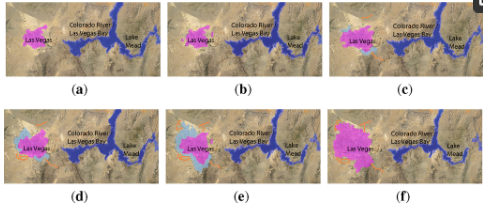
به عنوان مثال، پدیده های شهرنشینی را در طی سال های 1984-2012 برای شهرهای لاس وگاس (ایالات متحده آمریکا) و دبی (امارات متحده عربی) در نظر بگیرید. تجزیه و تحلیل تخصصی زیر در (N1-N2) فرآیندهای سطح بالای جغرافیایی، جمعیتی، اقتصادی، زیست محیطی و سایر فرآیندهای مرتبط با شهرنشینی را توصیف می کند. تعیینکنندههای کاملاً مکانی-زمانی شهرنشینی در این شهرها به ترتیب در شکلهای 1 و 2 نشان داده شدهاند. داده ها و تجزیه و تحلیل ها از طریق ابتکار TimeLapse در دسترس عموم (فهرست 1) به دست آمده است.
لیست 1. TimeLapse.
TimeLapse یک پروژه مشترک شامل گوگل، سازمان زمین شناسی ایالات متحده (USGS)، ناسا، TIME و CREATELab دانشگاه کارنگی ملون است. TimeLapse اخیرا انیمیشن تعاملی ساخته شده از تصاویر ماهواره ای زمین را منتشر کرده است. تصاویر ماهوارهای که از برنامه Landsat تهیه شدهاند، تصاویری را نشان میدهند که به سال 1984 بازمیگردند و جزئیات پیشرفت سال به سال تغییرات در سطح زمین را نشان میدهند.
نمای اولیه داده های تولید شده، پدیده هایی مانند جنگل زدایی در آمازون، اثرات استخراج زغال سنگ در وایومینگ، گسترش شهری شانگهای و لاس وگاس و خشک شدن بزرگترین دریاچه خاورمیانه، دریاچه ارومیه را به تصویر می کشد. ما از برخی از این نمونههای در دسترس عموم از TimeLapse برای ایجاد زمینهای برای زمینه کلی این مقاله و معرفی ایده تفسیر روایت محور در حوزه جغرافیایی استفاده میکنیم.
گوگل، ناسا، تایم http://world.time.com/timelapse/
N1. لاس وگاس
در طول دهه 1990 و بیشتر دهه 2000، مرزهای مترو لاس وگاس همچنان در حال گسترش بود، زیرا توسعه مسکن جدیدی برای انبوه آمریکایی هایی که می خواستند از اقتصاد در حال شکوفایی منطقه استفاده کنند، ایجاد شد. از سال 2000 تا 2010، جمعیت شهر نزدیک به 50٪ افزایش یافت – نرخی که یافتن آن در خارج از کشورهای در حال توسعه دشوار است.
اما اگر لاسوگاس همراه با بخش مسکن در چند سال اول قرن بیست و یکم رونق گرفت، با شروع رکود، این بخش به رکود افتاد. شهر برای بحران سلب مالکیت زمین صفر بود. در اواخر سال 2012، لاس وگاس به ازای هر 99 واحد مسکونی یک پرونده سلب حق اقامه دعوی داشت که برای چهارمین نرخ بالاتر در کشور خوب بود. و به همان اندازه که رشد لاس وگاس در چندین سال گذشته از نظر اقتصادی ناپایدار بوده است، ممکن است از نظر زیست محیطی حتی ناپایدارتر باشد. این شهر تقریباً هیچ بارانی دریافت نمی کند و بیشتر آب آن از دریاچه مید در نزدیکی آن می آید. اما همانطور که در تصاویر TimeLapse به وضوح مشاهده می شود، دریاچه مید در حال خشک شدن است، قربانی یک خشکسالی طولانی مدت – که بالقوه با تغییرات آب و هوایی همراه شده است – و افزایش تقاضا .در آن توسط جمعیت رو به رشد لاس وگاس. سطح آب دریاچه میدز از کمی بیش از 1200 فوت (365 متر) به 1125 فوت (343 متر) کاهش یافته است. در سالهای اخیر، مقامات لاسوگاس گامهای تحسینبرانگیزی برای کاهش هدررفت آب برداشتهاند، اما اگر دریاچه مید به کوچک شدن ادامه دهد، رشد شهر گناه متوقف خواهد شد.
N2. دبی
«در اواسط دهه 1980، […]، دبی یک شهر کوچک بیابانی با حدود 300000 نفر بود که توسط ابوظبی، پایتخت امارات متحده عربی، تحت الشعاع قرار گرفته بود. رشدی که دبی تجربه کرده بود بیشتر اخیر بود. در دهه 1950 کمی بیشتر از یک روستا بود و صنعت اصلی آن غواصی مروارید بود. امروزه جمعیت دبی بیش از 2.1 میلیون نفر است و این کلان شهر خود را به عنوان مرکز مالی خاورمیانه مطرح کرده است.
دبی شهری است که به نظر می رسید تقریباً یک شبه رشد می کند، مانند یک واحه صحرایی که واقعی شده است. بلندترین آسمانخراش جهان – برج خلیفه، …، – و همچنین بزرگترین مرکز خرید، بزرگترین پارک موضوعی و طولانیترین پیست اسکی سرپوشیدهاش را دارد… به ساختن ساده در بیابان، در طول چند دهه گذشته که دبی ساخته است بسنده نمیکند. بیرون به دریا شن و ماسه لایروبی شده از کف دریا برای ایجاد جزایر مصنوعی با اشکال قابل تشخیص – از جمله یک جفت درخت نخل – استفاده شده است. در گوشه سمت راست پایین تصاویر تایم لپس، مناطقی از شن های خالی با ساختمان های جدید پر شده است، زیرا شهر بیشتر و بیشتر از دریا دور می شود و به سمت صحرا می رود. این سرعت سرسامآور توسعه در سالهای اخیر تا حدودی کند شده است، زیرا دبی به شدت از رکود جهانی سال 2008 ضربه خورد.
به طور کلی، تجزیه و تحلیل متخصص سطح بالا شامل عقل سلیم، تفسیر کیفی (به عنوان مثال، قسمتهای زیر خطکشیده شده در N1-N2 در بالا) فرآیندهای شهری/جغرافیایی ممکن است از ویژگیهای مکانی و زمانی سطح پایین قابل اندازهگیری شناسایی شود که خود از طیف وسیعی از دادهها قابل دستیابی هستند. منابعی مانند تصاویر ماهوارهای و سنجش از دور، بررسیهای زمینی، سنجش محیط فیزیکی شبکههای حسگر و غیره . به طور خاص، پویایی پیچیده ای که در شناسایی فرآیندهای شهرنشینی نهفته است ممکن است چندین منبع داده را در بر گیرد، مانند:
- تصویربرداری ماهواره ای
- سنجش از دور
- آمار کاربری اراضی و پایگاه های اطلاعاتی، Gazetteers
- داده های جمعیت شناختی (به عنوان مثال، از نظرسنجی های سرشماری)
- داده های اقتصادی (درآمد، رشد، فعالیت اقتصادی، عملکرد ارز و بورس و غیره )
تمرکز مدل روایت محور ارائه شده در این مقاله به شدت بر جنبههای مکانی-زمانی پدیدههای جغرافیایی پویا است که زیربنای تغییرات جغرافیایی قابل درک در سطح شی یا ویژگی است. جنبه های مکانی-زمانی را می توان با انواع دیگر داده های کمی و کیفی (مانند اقدامات اقتصادی و جمعیتی و مطالعات سرشماری) مرتبط کرد. با این حال، درمان رسمی چنین همبستگی ها خارج از محدوده این مقاله است. ما تأکید میکنیم که مدلسازی و استدلال در مورد چنین همبستگیهایی واقعاً ممکن است و همچنین در محدوده چارچوب کلی تحلیلی مبتنی بر روایت برای GIS است که در این مقاله پیشنهاد شده است.
3. بازنمایی و استدلال فضایی کیفی
حوزه بازنمایی و استدلال کیفی مکانی-زمانی (QSTR) به دنبال تعریف مدلهای رسمی روابط مکانی و زمانی است که با جنبههای مختلف فضا، مانند توپولوژی، جهت، فاصله، اندازه و غیره سروکار دارند . QSTR به عنوان یک رشته تخصصی در هوش مصنوعی تکامل یافته است [ 31 ، 32 ، 49-51 ] . روشهای رسمی در QSTR یک رابط عقلانی مشترک برای انتزاع و استدلال در مورد اطلاعات فضایی کمی فراهم میکنند.
ویژگی مشترک مدلهای رسمی توسعهیافته، که اغلب محاسبات کیفی نامیده میشوند، این است که بر خلاف رویکردهای کمی، تعداد کمی از روابط اساسی متمایز میشوند. محاسبات مکانی/زمانی کیفی، سیستمهای جبری رابطهای هستند که به یک یا چند جنبه از فضا مربوط میشوند. آنها از جزئیات متریک انتزاع میکنند و بر ویژگیهایی تمرکز میکنند که در یک حوزه کاربردی خاص تفاوت ایجاد میکنند. این امکان تجزیه و تحلیل داده های مکانی-زمانی را در سطح بالایی از انتزاع و مستقیماً با توجه به مفاهیم مکانی-زمانی انسانی و استدلال عقل سلیم فراهم می کند. به این ترتیب، آنها ابزاری را برای نمایش و تجزیه و تحلیل داده ها به روشی انتزاعی که برای انسان طبیعی تر است، فراهم می کنند، یک چالش کلیدی برای GIS آینده (به عنوان مثال، [ 52-54 )]). اصول اساسی در QSTR شامل الگوریتمهای استدلال مبتنی بر محدودیت در یک دامنه نامتناهی (فضایی) برای حل مسائل سازگاری در زمینه محاسبات فضایی است. ایده کلیدی در اینجا این است که یک فضای کمیت نامتناهی را به دستههای ناپیوسته محدود تقسیم کنیم و از ویژگیهای رابطهای خاص چنین فضای تقسیمبندی شده برای اهداف استدلالی استفاده کنیم.
به طور کلی محاسبات فضایی کیفی را می توان به دو گروه محاسبات توپولوژیکی و محاسبات موقعیتی طبقه بندی کرد. با محاسبات توپولوژیکی، مانند محاسبه ارتباط منطقه (RCC)، موجودیتهای ابتدایی مناطق گستردهای از فضا هستند و احتمالاً میتوانند تاریخچههای مکانی-زمانی 4 بعدی باشند، به عنوان مثال، برای تجزیه و تحلیل الگوی حرکت. روش دیگر، در یک حوزه پویا که شامل حرکت انتقالی است، انتزاعات مبتنی بر نقطه با محاسبات جهت گیری کافی است. نمونه هایی از محاسبات جهت گیری عبارتند از [ 32 ]: جبر رابطه نقطه جهت دار (OPRAمتر)(OPRAمتر)، حساب دیفرانسیل و انتگرال دوقطبی و حساب دو قطبی مبتنی بر بخش خط.
مشابه این آثار، که در زمینه هوش مصنوعی/بازنمایی دانش (KR) واقع شدهاند، بسیاری از پیشرفتهای حیاتی از دیگر جوامع مرتبط با توسعه فرمالیسمها و الگوریتمها برای مدلسازی و استدلال در مورد اطلاعات مکانی به دست آمده است، که در اینجا نمونهای بارز است. حوزه تئوری اطلاعات مکانی برای سیستم های اطلاعات جغرافیایی (GIS) [ 55 ، 56 ]. پرکاربردترین و کاربردی ترین محاسبات فضایی (توپولوژیکی) کیفی، محاسبات RCC-8 [ 57 ] و مدل 9-تقاطع [ 58 ] است که هر دو اساساً همان هشت رابطه توپولوژیکی پایه را بین دو منطقه فضایی که در شکل 3 نشان داده شده است، متمایز می کنند.. (در این مقاله، ما از RCC-8 در تمام مثالهای خود استفاده خواهیم کرد.) عملیات بنیادی زیربنای اکثر تکنیکهای استدلال کیفی، ترکیب دو رابطه است: با توجه به برقراری رابطه بین موجودیتهای A و B و روابط بین B و C ، عملیات ترکیب به ما می گوید که چه روابطی می تواند بین A و C برقرار باشد. به عنوان مثال، در مورد RCC-8، A به عنوان قسمت خاص مماسی B و B جدا شده از C دلالت بر A به عنوان قسمت خاص غیر مماسی دارد .برای بسیاری از محاسبات کیفی، استدلال مبتنی بر ترکیب امکان تصمیم گیری برای سازگاری، و همچنین استنتاج اطلاعات جدید از مجموعه معینی از روابط را فراهم می کند (برای جزئیات به [ 32 ] مراجعه کنید).
کاربردهای مرتبط در GIS و برنامه ریزی شهری
محاسبات فضایی کیفی، به عنوان مثال، در حوزه GIS برای توصیف روابط فضایی در سناریوهای پرس و جو و بازیابی [ 59 ، 60 ] ، برای رسمی کردن مفاهیم و فرآیندهای (جغرافیایی) فضایی [ 61-64 ] ، و برای مشخص کردن دانش پس زمینه و محدودیت های یکپارچگی در زمینه کاربردهای پایگاه داده مکانی و مکانی-زمانی [ 65-67 ] . مفهوم همسایگی مفهومی [ 68 و 69 ] برای توصیف تغییرات فضایی در سطح روابط کیفی فضایی معرفی شده است و مبنایی برای انجام استدلال زمانی در قالب شبیه سازی، درون یابی و برنامه ریزی است.
ابزار
تکنیکهای استدلال فضایی به روشهای مختلفی بهعنوان ابزارهای عملی با هدف ارائه وظایف انتزاع فضایی عمومی، استدلال، سازگاری و رضایت از محدودیتها ظاهر میشوند، مثالهای اصلی در اینجا سیستمها هستند، CLP(QS) [ 70 ، 71 ]، SparQ [ 72 ]، GQR [ 73 ] و جعبه ابزار عمومی، QAT ، برای محاسبات n-ary [ 74 ].
4. انفورماتیک فضایی دینامیک جغرافیایی
چالشهای نظری اطلاعات مکانی زیربنای توسعه قابلیت تحلیلی سطح بالا در GIS پویا شامل مسائل اساسی بازنمایی و محاسباتی است که مربوط به موارد زیر است: معناشناسی رخدادهای مکانی، ربوده شدن عملی در GIS و پشتیبانی از آنها، مشکلات انتزاع دادهها، ادغام و فضایی. ثبات.
4.1. رخدادهای فضایی: تجزیه و تحلیل با رویدادها و اشیاء
هدف ما توسعه عملکردی است که امکان استدلال در مورد روایتهای مکانی-زمانی متشکل از رویدادها و فرآیندها در مقیاس جغرافیایی را فراهم میکند. ما تلاشی برای توصیف هستیشناختی دقیق رویدادها و فرآیندها نمیکنیم، موضوع تحقیقی که به طور عمیق در پیشرفتهترین زمان به آن پرداخته شده است. برای اهداف این مقاله، ما از یک مدل مفهومی حداقل، در عین حال غنی، متشکل از طیفی از رویدادها استفاده میکنیم، به طوری که میتوان از آن برای زمینبندی کیفی مجموعه دادههای مکانی متریک متشکل از ردپای مکانی و زمانی پدیدههای انسانی و طبیعی در جغرافیا استفاده کرد. مقیاس
رخدادهای فضایی ممکن است در دو سطح تعریف شوند: (I) مستقل از دامنه . و (II) وابسته به دامنه :
4.1.1. رخدادهای فضایی مستقل از دامنه
این رخدادها آنهایی هستند که ممکن است از نظر معنایی در یک نظریه کلی فضا و تغییرات فضایی مشخص شوند. اینها ممکن است با توجه به یک نظریه کیفی یا یک نوع شناسی پیچیده از رویدادهای جغرافیایی باشد. اینها ممکن است با توجه به یک نظریه کیفی یا یک نوع شناسی دقیق از رویدادهای مکانی (به عنوان مثال، رشد، انقباض، شبیه سازی، مرگ، انتقال [ 14 ]) باشد.
تغییرات فضایی در سطح کیفی
تا آنجا که به یک نظریه کلی کیفی تغییر فضایی مربوط می شود، تنها یک نوع وقوع وجود دارد، یعنی انتقال از یک وضعیت کیفی (رابطه) به حالت دیگر (رابطه) که (احتمالاً) توسط محدودیت های تداومی حاکم است. فضای رابطه در این سطح، تنها مفهوم قابل شناسایی از یک رخداد، انتقال فضایی کیفی است که اشیاء اولیه در تئوری متحمل می شوند، به عنوان مثال، انتقال یک شی ( o 1 ) از قطع شدن به شیء دیگر ( o 2 ) به وجود. یک قسمت مماس-مناسب ( شکل 3 را دوباره ببینید). در سطح یک نظریه فضایی، نسبت دادن یک انتقال فضایی خاص به عنوان یک رویداد یا کنش بی معنی است. چنین تمایزاتی سطح کمی بالاتر از انتزاع را می طلبد. به عنوان مثال، مثال انتقال از قسمت منقطع به قسمت مماسی مناسب می تواند حرکت ارادی یک فرد به داخل اتاق یا حرکت یک توپ را درشت نشان دهد. در حالی که اولی عملی است که توسط یک عامل انجام می شود، دومی یک رویداد قطعی است که لزوماً در شرایط عادی رخ می دهد. دیدگاه ما در اینجا این است که چنین تمایزاتی را فقط میتوان به شیوهای خاص برای دامنه ایجاد کرد. به این ترتیب، طبقهبندی رخدادها به کنشها و رویدادها تنها در سطح حوزهای اعمال میشود که نظریه کلی فضایی تنها با یک نوع وقوع سروکار دارد.
گونه شناسی رویدادها و الگوها
در سطح مستقل از حوزه، توضیح ممکن است شامل رفتارهایی مانند ظهور ، رشد و انقباض ، ناپدید شدن ، گسترش ، ثبات و غیره ، علاوه بر ترکیب متوالی/موازی اولیههای رفتاری فوقالذکر باشد، به عنوان مثال، ظهور و به دنبال آن رشد . گسترش/حرکت ، ثبات و ناپدید شدن در یک بازه زمانی. انواع خاصی از عناصر تیپولوژیکی، به عنوان مثال، رشد و انقباض، حتی ممکن است مستقیماً با تغییرات فضایی در سطح کیفی مرتبط باشد. ظهور اشیاء جدید و ناپدید شدن اشیاء موجود، چه به طور ناگهانی یا صریح در نظریه دامنه فرموله شده است، همچنین از ویژگی های سیستم های پویا (ژئو) فضایی غیر پیش پا افتاده است. در GIS مبتنی بر رویداد، رویدادهای ظاهری و ناپدید شدن به عنوان یک عنصر گونهشناختی مهم برای مدلسازی فرآیندهای جغرافیایی پویا در نظر گرفته میشوند [ 1 ، 14 ]. به عنوان مثال، کلارامونت و تریو [ 1 ] فرآیندهای اساسی مورد استفاده برای تعریف مجموعه ای از رویدادهای مکانی-زمانی درجه پایین را شناسایی می کنند، که در میان چیزهای دیگر، رخدادهای ظاهری و ناپدید شدن را به عنوان اساسی در بر می گیرند. به طور مشابه، به سمت مدلهای مبتنی بر رویداد پدیدههای جغرافیایی پویا، وربویز [ 14 ]] استفاده از رخدادهای ظاهر و ناپدید شدن را حداقل تا آنجا که به رفتارهای تک شی مربوط می شود پیشنهاد می کند ( شکل 4 را ببینید ). ظاهر، ناپدید شدن و ظهور مجدد نیز به موضوع حفظ هویت شی در GIS مرتبط است [ 10 ، 11 ].
4.1.2. رخدادهای فضایی خاص دامنه
در سطح وابسته به حوزه، الگوهای رفتاری ممکن است فرآیندهای سطح بالا، فعالیت های زیست محیطی/طبیعی و انسانی مانند جنگل زدایی، شهرنشینی، تغییر کاربری زمین و غیره را مشخص کند. اینها رویدادهای خاص دامنه هستند که باعث ایجاد دگرگونی در ساختارهای فضایی زیربنایی در حال مدلسازی میشوند [ 15 ]. اساساً، اینها رویدادها یا اقدامات خاص حوزه هستند که دارای معیارهای وقوع و تأثیرات (به وضوح) قابل شناسایی هستند که می توانند بر اساس تغییرات کیفی فضایی و گونه شناسی بنیادی تغییرات فضایی تعریف شوند. به عنوان مثال، در مثال شکل 4 ، به وضوح میتوانیم ببینیم که منطقه a در طول سالهای 1950 تا 1990 به کوچک شدن ادامه داده و در نهایت ناپدید شده است.در مجموع مفهوم کلی زیر از “رویداد فضایی” قابل شناسایی است [ 75 ]:
« رویدادهای فضایی به ترتیب رویدادها یا کنش هایی با معیارها و/یا پیش شرط های وقوع صریحاً مشخص و اثراتی هستند که ممکن است بر حسب طبقه بندی مستقل حوزه تغییر فضایی که بومی یک نظریه کلی کیفی فضایی است ، شناسایی شوند.»
به عنوان مثال، رویدادی را در نظر بگیرید که باعث تقسیم یا کوچک شدن یک منطقه می شود . به همین ترتیب، مجموعهای از موجودیتهای جغرافیایی (مثلاً در حوزه زیستشناسی حیات وحش) ممکن است حرکت کند و جهتگیری خود را نسبت به سایر موجودات جغرافیایی تغییر دهد. تفکر در شرایط عامل، یک کنش فضایی توسط نهاد جمعی/مجموعه، به عنوان مثال، چرخش به سمت جنوب شرقی، تأثیر تغییر جهت خوشه در رابطه با سایر موجودات را خواهد داشت. در موقعیتهای خاص، ممکن است مجموعهای از رخدادهای خاص دامنه با معیارهای وقوع یا اثرات آشکارا شناخته شده وجود نداشته باشد که بر حسب گونهشناسی تغییرات فضایی قابل تعریف باشد، به عنوان مثال، دستهای از جرایم مرتبط با الکل به طور ناگهانی ظاهر و ناپدید میشوند. یک زمان خاص با این حال، حتی در چنین شرایطی، تجزیه و تحلیل رویدادهای مستقل از حوزه و روابط بین رویدادی ممکن است به درک روابط مکانی-زمانی منجر شود و به تولید فرضیه عملی کمک کند [ 5 ].
4.2. ربایش عملی برای GIS
استدلال توضیحی مستلزم توانایی انجام ربودن با اطلاعات مکانی-زمانی است. در زمینه محاسبات مکانی-زمانی رسمی، و منطق کنش و تغییر، این به توانایی ارائه سناریو و توانایی های تکمیل روایت در سطح بالایی از انتزاع ترجمه می شود.
دامنه GIS نشان داده شده در شکل 4 و درک مفهومی اولیه از رخدادهای فضایی شرح داده شده در بخش 4.1 را در نظر بگیرید. در یک سطح مستقل از حوزه، صحنه ممکن است با استفاده از روابط اندازه توپولوژیکی و کیفی توصیف شود. در نتیجه، تنها تغییراتی که در سطح نظریه فضایی قابل شناسایی است، کوچک شدن و در نهایت ناپدید شدن است – این به این دلیل است که یک نظریه فضایی مستقل از حوزه ممکن است فقط شامل یک گونهشناسی عمومی باشد (ظاهر، ناپدید شدن، رشد، انقباض، تغییر شکل، شکافتن). ، ادغام و غیره ) تغییرات فضایی. با این حال، در یک سطح دامنه خاص، این تغییرات می تواند یک رویداد (یا فرآیند) خاص مانند جنگل زدایی را مشخص کند.. فرضیهها یا توضیحاتی که در طی یک فرآیند تبیین ایجاد میشوند، لزوماً باید شامل رخدادهای سطح دامنه علاوه بر تغییرات فضایی زیربنایی (مرتبط) (طبق گونهشناسی عمومی) باشند که قابل شناسایی هستند. به طور شهودی، تبیین های مشتق شده کم و بیش شکل گزاره های وجودی را به خود می گیرند، مانند: «بین نقاط زمانی t i و t i.روند جنگل زدایی به عنوان یک فرضیه بالقوه قابل ردیابی است. فرضیهها/توضیحات مشتقشده که هم وابسته به حوزه و هم عناصر گونهشناختی مستقل از حوزه مربوطه را شامل میشوند، از دیدگاه تحلیل توضیحی برای یک حوزه، «کافی» نامیده میشوند. هم در سطوح مستقل از حوزه و هم در سطوح وابسته، آدم ربایی به توانایی اساسی برای درون یابی اطلاعات از دست رفته و درک روایت های تا حدی در دسترس که اجرای فرآیندهای واقعی یا انتزاعی سطح بالا را توصیف می کند، نیاز دارد. در ادامه، مروری بصری از روند تکمیل سناریو و روایت ارائه میکنیم.
تکمیل سناریو و روایت
مشکلات توضیحی مستلزم گنجاندن یک توصیف روایی است، که از دیدگاه منطقی این مقاله، اساساً یک دوره متمایز از رویدادهای واقعی است که ممکن است اطلاعات ناقصی درباره آن داشته باشیم [ 16 ، 17 ]. توصیفات روایی معمولاً به عنوان مشاهدات از اجرای واقعی/تخیلی یک سیستم یا فرآیند در دسترس هستند. از آنجایی که روایات ذاتاً به مشاهدات واقعی مربوط می شوند، یعنی زمانی هستند ، هدف اغلب جذب/توضیح آنها با توجه به یک مدل فرآیند زیربنایی و رویکردی برای استخراج توضیحات است.
با توجه به روایتهای جزئی که تکامل یک سیستم را توصیف میکنند (مثلاً از طریق مشاهدات صحنهای مرتب شده در مجموعه دادههای GIS مبتنی بر رویداد) از نظر دادههای مکانی-زمانی سطح بالا، سناریو و تکمیل روایت با توانایی استخراج تکمیلها مطابقت دارد. که با درون یابی اطلاعات مکانی و کنش/رویداد گمشده به شیوه ای که با قوانین/دینامیک های خاص و مستقل از حوزه سازگار باشد، روایت را پل می کند.
تصویر شکل 5 را برای فضای موقعیت انشعاب/فرضی که تکامل کامل یک سیستم را مشخص می کند، در نظر بگیرید. در شکل 5 ، تاریخچه مبتنی بر موقعیت < s 0 , s 1 , …, s n > یک مسیر را نشان می دهد که مربوط به یک خط زمانی واقعی < t 0 , t 1 , …, t n > است که در انشعاب کلی- فضای موقعیت ساختاری درختی هدفتوضیح علّی [ 75 ] در یک زمینه مکانی-زمانی، استخراج یک یا چند مسیر از فضای موقعیت انشعاب است که می تواند به بهترین وجه با اطلاعات روایی موجود مطابقت داشته باشد. البته، تکمیلهایی که روایت را با درونیابی اطلاعات مفقود فضایی و کنش/رویداد پیوند میدهند، باید با قوانین/دینامیکهای خاص و مستقل از دامنه سازگار باشند.
توضیح، به طور کلی، به عنوان یک عملیات معکوس با فرافکنی زمانی در نظر گرفته می شود، که اساساً شامل استدلال از تأثیرات به علل، یعنی استدلال در مورد گذشته است [ 76 ]. ربودن منطقی یکی از الگوهای استنتاجی است که می تواند برای درک توضیح استفاده شود. در بخش 5، یک تصویر عملی از مفهوم سناریو و تکمیل روایت (با ربودن) برای تحلیل توضیحی در حوزه GIS ارائه میکنیم.
4.3. تقسیم بندی زمانی، انتزاع کیفی و ادغام
یک سیستم GIS مبتنی بر رویداد مبتنی بر یک مدل هستیشناختی و محاسباتی روایی محور دینامیک جغرافیایی به توانایی مدیریت دادهها از منابع متعدد، به عنوان مثال، از حسگرهای مختلف، دادههای سنجش از دور، دادههای نقشه و غیره نیاز دارد. خود چنین داده هایی اغلب دچار خطاهای اندازه گیری، عدم قطعیت و غیره می شوند. در این بخش، برخی از چالشهای فنی مربوط به مدیریت دادههای مکانی-زمانی پویا را توضیح میدهیم. چالش ها ماهیتی کلی دارند، اما از دیدگاه مدل روایت محور (بخش 5؛ شکل اول در بخش 5) این مقاله اهمیت ویژه ای دارند.
4.3.1. تقسیم بندی زمانی و انتزاع کیفی
برای انجام تجزیه و تحلیل توضیحی در سطح روابط فضایی کیفی، دادههای ورودی کمی ارجاع داده شده جغرافیایی درباره اشیاء فضایی از منابع مختلف باید به روابطی از چندین مدل فضایی کیفی یا محاسبات مربوط به جنبههای مختلف فضا تبدیل شوند، فرآیندی که ما به آن اشاره میکنیم. انتزاع کیفی. یک پیش نیاز برای اعمال روش انتزاع کیفی این است که داده های ورودی به طور موقت به گونه ای تقسیم شوند که هر قسمت با یک نقطه زمانی خاص در یک دنباله مرتب از نقاط زمانی مرتبط باشد. برای هر نقطه زمانی، روش انتزاع کیفی دادههای کمی مرتبط را میگیرد و روابط فضایی را از مدلهای کیفی داده شده بین اشیاء درگیر استخراج میکند. نتیجه یک توصیف فضایی کیفی ایستا برای هر نقطه زمانی است. اگر عدم قطعیت اطلاعات کمی به صراحت نشان داده شود، این باید در نظر گرفته شود و ممکن است منجر به گسست روابط در سطح کیفی شود.
4.3.2. یکپارچگی و سازگاری فضایی
با توجه به خطاهای اندازهگیری ذکر شده و عدم قطعیت دادههای ورودی کمی، توصیفهای کیفی ناشی از انتزاع کیفی برای مقاطع زمانی خاص ممکن است حاوی تناقضاتی باشد یا محدودیتهای یکپارچگی ناشی از دانش پسزمینه حوزه را نقض کند. شکل 6 مورد ناهماهنگی فضایی در سطح روابط توپولوژیکی را هنگام ترکیب اطلاعات از چهار منبع مختلف (همه مربوط به یک نقطه زمانی) نشان می دهد: از ترکیب این واقعیت که اجسام C و D (مثلاً دو پدیده آب و هوایی) گزارش شده اند. برای همپوشانی یک منبع (a) با روابط گزارش شده، C به طور کامل در A (b) و D موجود استبه طور کامل در B (c) گنجانده شده است، نتیجه آن این است که دو ناحیه A و B نیز باید همپوشانی داشته باشند. این در تضاد با اطلاعات منبع چهارم (d) است، که برای مثال میتواند یک پایگاه داده فضایی حاوی مرزهای مناطق اداری باشد که میگوید A و B به صورت خارجی به هم متصل هستند. به جای منبع چهارم، ما همچنین میتوانستیم یک محدودیت کلی برای یکپارچگی معرفی کنیم که بیان میکند مناطق اداری در یک سطح هرگز همپوشانی ندارند. این امر منجر به همان تناقض می شد که اطلاعات داده شده را ناسازگار می کرد.
در نتیجه احتمال وقوع اطلاعات ورودی متناقض در کاربردهای جغرافیایی، چارچوبهایی برای تبیین و تحلیل مکانی-زمانی نیاز به توانایی حداقل تشخیص این تناقضها دارند تا اطلاعات متناقض را کنار بگذارند یا به عنوان یک رویکرد مناسبتر، تضادها را برطرف کنند. به روشی مناسب حذف تناقضات منطقی در چارچوب یک رویکرد استدلال ابداعی مبتنی بر منطق بسیار مهم است، همانطور که در این مقاله پیشنهاد میکنیم، زیرا در غیر این صورت، نتیجهگیری نادرست میتواند از یک ناسازگاری استنتاج شود که در نهایت منجر به نتایج نادرست خواهد شد. در حالی که این دیدگاه که ناسازگاری های منطقی نامطلوب هستند به چالش کشیده شده است (نگاه کنید به [ 77 ]])، تجزیه و تحلیل توضیحی با اطلاعات متناقض چالش های زیادی را ایجاد می کند که فراتر از محدوده این مقاله است. در کاربردهای خاص، ممکن است بتوان به این نتیجه رسید که اطلاعات خاصی برای کار توضیحی موجود نامربوط است و این اطلاعات را از قبل فیلتر کنید، به طوری که نیازی به حذف تناقضات در این اطلاعات نباشد.
تصمیم گیری در مورد سازگاری مجموعه ای از روابط فضایی کیفی به عنوان یکی از وظایف استدلال اساسی در بازنمایی و استدلال فضایی کیفی مورد مطالعه قرار گرفته است [ 32 ]. پیچیدگی تصمیم گیری ثبات به طور قابل توجهی در محاسبات کیفی موجود متفاوت است. برای اکثر محاسبات کیفی رایج، مانند RCC-8، زمانی که توصیف ورودی یک سناریو است، سازگاری را می توان در زمان مکعب تعیین کرد، به این معنی که شامل تفکیک روابط نیست. این امر با روش سازگاری مسیر یا بسته شدن جبری [ 78 ] به دست میآید، که در نهایت بر اساس مجموعهای از بدیهیات ترکیب است که با توجه به روابط برقرار شده بین شی A، حالتی را که میتواند بین اشیاء A و C برقرار کند، برقرار میکند.و B و بین B و C. برای یک توصیف کلی، از جمله تفکیک ها، باید جستجوی پرهزینه تری انجام شود.
محدودیت های یکپارچگی در ادبیات پایگاه داده (مکانی) مورد بررسی قرار گرفته است [ 79 ، 80 ]. همانطور که مثال بالا نشان می دهد، قوانین یکپارچگی در یک بافت جغرافیایی اغلب به شکل روابط فضایی کیفی هستند که باید توسط انواع خاصی از موجودیت های فضایی ارضا شوند. این نوع از محدودیتهای یکپارچگی فضایی را میتوان با استفاده از استدلال اصطلاحشناختی برای تعیین اینکه آیا یک قاعده یکپارچگی معین باید در چند مورد معین از اشیاء اعمال شود و تغذیه محدودیتهای حاصله در یک بررسیکننده سازگاری کیفی استاندارد همراه با روابط کیفی ناشی از داده های ورودی.
4.3.3. حل تعارض
همانطور که در بخش قبل نشان داده شد، زمانی که تضادها در طول یکپارچه سازی داده های مکانی به وجود می آیند، اغلب مطلوب است که نه تنها ناسازگاری ها تشخیص داده شود، بلکه تضادها به شیوه ای معقول حل شود تا همچنان بتوان از تمام اطلاعات ارائه شده در منطق واقعی بهره برداری کرد. رویکرد استدلالی برای تبیین و تحلیل به عنوان مثال، روشهای یکپارچهسازی دادهها و حل تعارض تحت عنوان ترکیب اطلاعات [ 81 ] مورد مطالعه قرار گرفتهاند.]. آنها معمولاً به رویکردهای کمی و رویکردهای نمادین طبقه بندی می شوند. رویکردهای کمی عمدتاً از روشهای آماری مانند تنظیم حداقل مربعات برای مقابله با مشاهدات چندگانه استفاده میکنند، در حالی که آمیختگی اطلاعات نمادین به تجدید نظر در نظریههای منطقی تحت حضور شواهد جدید مربوط میشود. یک تمایز مهم در اینجا بین تجدید نظر و به روز رسانی است. در صورت تجدید نظر، اطلاعات اضافی در مورد یک وضعیت خاص از جهان در دسترس می شود و باید با آنچه قبلا شناخته شده بود ترکیب شود. در مورد به روز رسانی، فرض می شود که وضعیت ممکن است تغییر کرده باشد و اطلاعات جدید به روزتر از دانش قبلی است. این تنظیمات مختلف ترکیب اطلاعات منجر به فرمول بندی معیارهای عقلانیت متفاوتی شده است که رویکردهای محاسباتی مربوطه باید برآورده شوند، مانند به اصطلاح فرضیه های AGM برای تغییر باور [ 82 ].]. چنین راه حل های محاسباتی اغلب شامل اپراتورهای ادغام می شوند که یک مدل ثابت را محاسبه می کنند که شبیه ترین داده های ورودی ناسازگار است. در رویکردهای ادغام مبتنی بر فاصله، این مفهوم شباهت با استفاده از اندازهگیری فاصله بین مدلها توصیف میشود. این ایده برای نمایشهای فضایی کیفی [ 83 ، 84 ] با استفاده از مفهوم همسایگی مفهومی [ 68 ، 69 ] برای اندازهگیری فاصله بر حسب تعداد تغییرات محلهای که برای رسیدن از توصیفهای کیفی ناسازگار به توصیفهای سازگار باید انجام شوند، اعمال شده است. .
برای نشان دادن عملکرد یک رویکرد ادغام کیفی برای حل تعارض، اجازه دهید مثالی را در شکل 7 در نظر بگیریم که در آن اطلاعات از دو منبع ارائه دهنده اطلاعات در مورد شهر دبی ( شکل 2 را مجدداً ببینید ) در یک زمان معین باید ادغام شوند: اجازه دهید ما می گوییم منبع اول، G ، هندسه هایی را برای دو ناحیه، G دیره و G Mirdif ارائه می دهد (در شکل 7a به صورت چند ضلعی با مرزهای کاملا ترسیم شده نشان داده شده است ، در حالی که منبع دوم، G ، هندسه هایی را برای ناحیه دیگری ارائه می دهد. جی“بر دبیجیبر دبی“و برای خود شهر دبی، جی“دبی�Dubai“(هر دو به صورت چند ضلعی با مرزهای شکسته در شکل 7a نشان داده شده اند. اجازه دهید فرض کنیم که در این سناریو دو قید یکپارچگی نیز برای نتیجه ادغام داریم. مورد اول بیان می کند که هندسه نواحی نمی توانند همپوشانی داشته باشند و بنابراین، باید از هم جدا باشند. یا لمس کردن (انفصال {ec, dc} از نظر روابط RCC-8). محدودیت دوم ایجاب می کند که هر هندسه ناحیه شهر باید به طور کامل در هندسه شهر گنجانده شود. این مربوط به تفکیک {ntpp tpp} از نظر روابط RCC-8 و در رابطه هر یک از سه ناحیه به اعمال می شود جی“دبی�Dubai“. همانطور که شکل 7a نشان می دهد، قرار دادن هندسه هر دو منبع منجر به نقض هر دو محدودیت یکپارچگی می شود: G Deira و جی“بر دبیجیبر دبی“همپوشانی (RCC-8 رابطه po)، و G Mirdif و جی“دبیجیدبی“همپوشانی، همچنین. یک رویکرد ادغام کیفی اکنون این تضادها را در سطح کیفی با محاسبه سناریوی ثابتی که به تفسیر کیفی اطلاعات ورودی نزدیک است، حل می کند. یک نتیجه ممکن در شکل 7b نشان داده شده است . رابطه بین جی دیره و جی“بر دبیجیبر دبی“به {ec} و G Mirdif و جی“دبیجیدبی“به {tpp}، که با پیکربندی فضایی واقعی نشان داده شده در شکل 7c مطابقت دارد .
5. تجزیه و تحلیل جغرافیایی: یک چارچوب رسمی مبتنی بر روایت
بحثهای بخش 3 طیفی از چالشهای بازنمایی و محاسباتی را در بر میگرفت که در زمینه تحلیل جغرافیایی پویا به وجود میآیند. اکنون چارچوب رسمی خود و معماری مفهومی مربوط به آن را برای مدلسازی کیفی سطح بالا و تحلیل توضیحی برای حوزه دینامیک جغرافیایی نشاندادهشده در شکل 8 توصیف میکنیم.
5.1. مروری بر معماری
معماری پیشنهادی ما شامل طیف وسیعی از مراحل مورد نیاز برای انجام تحلیل توضیحی دینامیک جغرافیایی در سطح کیفی انتزاع است که از پردازش دادههای واقعی (معمولاً کمی) برای تشکیل یک توصیف کیفی منسجم تا استفاده از استدلال ابداکتیو برای تکمیل روایت و به رسمیت شناختن فرآیندهای سطح بالا که منجر به ایجاد پایگاه دانشی می شود که می تواند توسط سیستم های کاربردی و تصمیم گیرندگان پرس و جو و استفاده شود. جنبه های اصلی معماری پیشنهادی به شرح زیر است:
- مجموعه داده های ورودی ورودی شامل مجموعه داده هایی از چندین منبع است ، مانند داده های سنجش از راه دور، پایگاه های داده مکانی، داده های حسگر و غیره .
- پیش پردازش سپس این مجموعه داده ها برای استخراج مشاهدات فضایی کیفی مرتبط با نقاط زمانی خاص پردازش می شوند تا به جزء استدلال واقعی تحویل داده شوند. این پیش پردازش توسط ماژول Temporalpartitioning and Integration انجام می شود که وظیفه پارتیشن بندی داده های ورودی به نقاط زمانی و یکپارچه سازی داده های مرتبط با همان نقطه زمانی، از جمله حل تضادهای فضایی را بر عهده دارد.
- انتزاع کیفی . این ماژول خود توسط ماژول انتزاع کیفی برای انجام انتزاع از اطلاعات کمی به کیفی و ماژول بررسی سازگاری برای آزمایش اینکه آیا یک توصیف فضایی کیفی سازگار است یا حاوی تضادهای منطقی است پشتیبانی می شود.
- شرح سناریو و (جزئی) روایی . مشاهدات کیفی مرتب شده زمانی تولید شده توسط ماژول پارتیشن بندی و ادغام زمانی ، سناریو و توصیفات روایت را تشکیل می دهند و به عنوان ورودی ماژول استدلال عمل می کنند ، که در خود یک یا چند شکل از قابلیت های استدلال (تبیینی) را تعبیه می کند.
- استدلال توضیحی . مؤلفه استدلال منجر به اشتقاق دانش مکانی-زمانی می شود که می تواند توسط سرویس های خارجی و سیستم های کاربردی که مستقیماً با انسان ها در ارتباط هستند (مثلاً متخصصان، تصمیم گیرندگان) مورد استفاده قرار گیرد. دسترسی را می توان توسط یک ماژول Query Processing ارائه کرد که امکان شناسایی ابداکیبل های سطح بالا در پایگاه دانش مشتق شده را فراهم می کند.
در ادامه، معماری را بیشتر توضیح میدهیم و مثالهای عملی از مشکلات و راهحلهایی را که قبلاً در بخش 4 در چارچوب یک مطالعه موردی توضیح دادیم، ارائه میکنیم.
5.2. دامنه دینامیک شهری
روایت شهری به طور قابل توجهی بی اهمیت زیر را در نظر بگیرید (الهام گرفته از پویایی یک شهر واقعی)؛ توضیحات متنی نیز به عنوان یک خط زمانی در شکل 9 نشان داده شده است ، و تغییرات سطح شی همراه با پیشرفت زمانی آنها در شکل 10 نشان داده شده است.
- – داستان بمباج . شهر معاصر ممباج زمانی مجموعه ای از جزایر کوچک و نزدیک بود که توسط جنگل های حرا و دیگر جنگل های انبوه احاطه شده بود، در امتداد ساحل یک خشکی عظیم در دریای عرب. انسانها با هدایت نزدیکی بومباج به دریا و دنیای غرب، بخشهای وسیعی از جنگلهای حرا را جنگل زدند و احیای جزایر را برای تشکیل یک موجودیت پیوسته و متصل به خشکی عظیم به عهده گرفتند. این موجود پیوسته به نام شهر بمباج (بعداً ممباج) شناخته شد.
- – مهاجرت _ در ابتدا، جنگلی انبوه (که متعاقباً تبدیل به یک پارک ملی در خطر انقراض شد) در شمال شرقی، دریا در غرب و سکونتگاههای کوچک انسانی از طریق سکونتگاههای نیمه شهری/کممرتبه و روستایی وجود دارد. ایده بمباج – توصیف معنایی آن به عنوان یک مکان – بر این سکونتگاه های انسانی متمرکز است.
- – راه اندازی زیرساخت اولیه زیرساخت ها در تلاش برای ارائه دسترسی/پوشش در داخل شهر ایجاد می شوند: پیوندهای حمل و نقل اصلی علاوه بر ابتکارات دیگر ایجاد می شوند. مناطق مفهومی جدید ایجاد می شود و نام مکان ها بر اساس تقسیم بندی ایجاد شده توسط پیوند حمل و نقل شکل می گیرد. در درجه اول، دو منطقه اصلی که ایجاد شده و تا به امروز ادامه دارد، به نام های شرقی-بومباج و غربی-بمباج شناخته شده اند.
- – توسعه مسکونی . مناطق مسکونی جدید پدید می آیند و منطقه غرب، به دلیل نزدیکی به دریا، امتیاز اجتماعی-اقتصادی پیدا می کند. پس از آن، نیروهای اقتصادی قدرتمند حکم میکنند که مناطق کم درآمد/کممرتبه، پرجمعیت از مهاجران اخیر (به عنوان مثال ، گروههای کارگری)، در منطقه شرقی نه چندان جذاب ایجاد شوند. این شهر اکنون شروع به کسب شخصیت واقعی خود می کند.
- – صنعتی شدن منطقه شرق، که از نظر اجتماعی-اقتصادی به عنوان جذابیت کمتری تلقی میشود، شروع به جذب بخشهای منزوی صنعتی شدن میکند. مناطق صنعتی جدید در مجاورت سکونتگاه های انسانی ایجاد می شوند.
- – توسعه زیرساخت . صنعتی شدن، که با مهاجرت بیشتر به شهر تقویت شده است، توسعه زیرساخت های بیشتری را ضروری می کند. شبکه های حمل و نقل جدید ساخته می شوند و نقاط اصلی تقاطع / تقاطع ها ایجاد / ایجاد می شوند. این اتصالات به عنوان نقاط تجمع اقتصادی اهمیت پیدا می کنند. مناطق صنعتی جدید در اطراف این مراکز فعالیت اقتصادی ایجاد می شود.
- – مهاجرت سریع شهری جنگل زدایی گسترده جنگل های انبوه و مناطق حرا در نتیجه ارزش مالی بالای زمین در منطقه غرب و هجوم و توسعه مجدد جمعیت در منطقه شرق انجام می شود. رونق اقتصادی به این معنی است که افرادی که دارای درآمد پایین تری هستند، کنار گذاشته می شوند و بازاری برای سکونتگاه های نیمه شهری در منطقه شرق وجود دارد که قبلاً عمدتاً از سکونتگاه های روستایی تشکیل می شد.
مثال 5.1 (تحلیل فرآیند در حوزه پویایی شهری) حوزه پویایی شهری از فرآیندهای پایه سطح بالا، مانند صنعتی شدن، مهاجرت، جنگل زدایی و جابجایی تشکیل شده است. دامنه از موجودیت های زیر تشکیل شده است: RuralZones: rz 1 , rz 2 , rz 3 ; ForestZones: پارک (prk 1 )؛ حرا: میلی گرم 1 ، میلی گرم 2 ، میلی گرم 3 ؛ SemiUrbanZones: suz 1 , suz 2 ; HighRiseZone: ساعت 1 ؛ مناطق شهری: منطقه 1 (ds 1 )، EastZone (ez)، WestZone (wz)، دریا 1 ; پیوندهای حمل و نقل: tl 1 , tl2 ; مناطق صنعتی: iz 1 , iz 2 , iz 3 .
از دیدگاه استدلال روایی سطح بالا، مؤلفههای نظریه که نیاز به مدلسازی رسمی دارند عبارتند از: (1) محدودیتهای حوزه، روابط فضایی (بر اساس دادههای مشاهدهای) و سایر ویژگیهای وجودی مربوط به (ظاهر و ناپدید شدن) اشیاء. ; (2) پویایی فرآیند، یا قوانین حوزه، که معیارهای وقوع و اثرات را برای رویدادهای دامنه خاص تعیین می کند. (3) ابداکی پذیرهای سطح بالا که قوانین علّی را ارائه می کنند که ممکن است به عنوان مبنای استخراج فرآیند از یک مدل ربوده شده منطقی که فقط از رویدادهای مستقل از دامنه تشکیل شده است استفاده شود.
محدودیتهای دامنه و ابداییپذیرهای سطح بالا با هم مشخصات کلی را تشکیل میدهند که به عنوان نظریه دامنه نامیده میشود، برای حوزه پویایی شهری. ابداییپذیرهای سطح بالا نقش مستقیمی در فرآیند تکمیل روایت بازی نمیکنند، بلکه فقط در مرحله پس پردازش (به عنوان وسیلهای برای جستجوی دانش ربودهشده/مشتقشده) مورد نیاز هستند.
در یک سیستم GIS مبتنی بر شی و رویداد، ممکن است تصور شود که اطلاعات نمادین سطح بالا از طیف وسیعی از منابع داده در دسترس باشد. انجام تجزیه و تحلیل توضیحی با این اطلاعات ابتدا نیازمند پارتیشن بندی زمانی، انتزاع کیفی و قابلیت های یکپارچه سازی است که در ادامه ارائه می شود.
5.3. تقسیم بندی زمانی، انتزاع کیفی و ادغام
برای نشان دادن نقش پارتیشن بندی و ادغام زمانی با انتزاع کیفی، بررسی سازگاری و حل تعارض (که قبلا در بخش 4.3 مورد بحث قرار گرفت) در مثال ما، اجازه دهید فرض کنیم که داده های ورودی (الف) از منابع مختلف سرچشمه می گیرند و (ب) هر قطعه اطلاعات با یک مهر زمانی همراه است که مشخص می کند اندازه گیری یا مشاهده اساسی چه زمانی انجام شده است. به طور دقیق تر، اجازه دهید بگوییم که منبع 1 اطلاعاتی در مورد مناطق مختلف کاربری اراضی از جمله پارک ها، مناطق مسکونی و مناطق صنعتی ارائه می دهد که با تجزیه و تحلیل تصاویر هوایی به دست می آید، در حالی که منبع 2 اطلاعاتی در مورد مخازن طبیعی ارائه می دهد که در مورد پارک و حرا است. ، ناشی از یک پایگاه داده فضایی. تمام اطلاعات دیگر در مثال ما از منابع اضافی آمده است، اما در اینجا نقشی در این مورد ندارد.
از آنجایی که تمام هندسه هایی که از منابع 1 و 2 به دست می آوریم دارای مهر زمانی هستند، اولین چیزی که باید اتفاق بیفتد تقسیم کل دوره زمانی تحت پوشش به فواصل زمانی است و به این وسیله گروه هایی از حقایق مکانی را القا می کند که با هر بازه مرتبط هستند. مهر زمان آنها هر بازه با یک نقطه زمانی، t i ، در یک دنباله مرتب از نقاط زمانی نشان داده می شود.
شکل 11a بخشی از اطلاعات ترکیبی از همه منابع را نشان می دهد که پس از تقسیم بندی موقت در دوره زمانی t 4 نشان داده شده در شکل 10d از مثال 5.1 قرار می گیرند. منابع 1 و 2 هر دو حاوی چند ضلعی های جغرافیایی مرجع برای پارک هستند، اما این اطلاعات مطابقت ندارند. برای به دست آوردن یک توصیف کیفی ثابت برای دوره زمانی t 4 ، روش ادغام از الگوریتم 1 پیروی می کند که مجموعه ای از هندسه های مشاهده شده را می گیرد. O�، با شناسه های شی و مجموعه ای از محدودیت های یکپارچگی، مدار مجتمعمدار مجتمع، به عنوان ورودی اولین گام استفاده از ماژول Qualitative Abstraction برای ترجمه داده های هندسی ترکیبی به روابط فضایی کیفی است که منجر به یک شبکه محدودیت کیفی، Q می شود. (به طور متناوب، اطلاعات برای هر مجموعه داده می تواند به طور جداگانه واجد شرایط شود، که منجر به ایجاد چندین شبکه محدودیت می شود که باید توسط یک اپراتور ادغام مناسب ترکیب شوند.) با استفاده از روابط از حساب RCC-8 ( شکل 3 را دوباره ببینید )، این شبکه همانطور که نشان داده شده است به نظر می رسد. در شکل 11b ( p و p ‘ نشان دهنده هندسه های مختلف برای یک شی پارک است). در مرحله بعد، ماژول Consistency Checking برای آزمایش اینکه آیا شبکه Q استفاده می شودسازگار و مطابق با محدودیت های یکپارچگی است. اگر چنین باشد، نتیجه را می توان مستقیماً به عنوان یک مشاهده کیفی برای t 4 به ماژول استدلال تحویل داد. با این حال، همانطور که در شکل 11b نیز نشان داده شده است ، این مورد صادق نیست، زیرا محدودیت های یکپارچگی در سه مکان نقض می شوند. این نقضها با فهرست کردن روابط احتمالی زیر از محدودیت یکپارچگی در پرانتزهای زیر رابطه اصلی نشان داده میشوند. رابطه بین p و p باید معادله باشد زیرا مشخص است که هر دو یک شی را نشان می دهند. رابطه بین rz 2 و pبه دلیل قیود یکپارچگی باید ec یا dc باشد و همین امر برای رابطه بین p ‘ و iz 2 نیز صادق است . بنابراین، مؤلفه حل تعارض کیفی باید فراخوانی شود تا یک نمایش کیفی پیدا شود که تا حد امکان به شبکه از شکل 11b نزدیک باشد ، اما در کل سازگار باشد.

برای دستیابی به حل تعارض، یک عملگر، Λ، بر اساس ایده عملگرهای ادغام مبتنی بر فاصله برای نمایشهای فضایی کیفی [ 83 ، 84 ] برای Q اعمال میشود . عملگر وضوح ما، Λ، بر اساس اندازه گیری فاصله، d ( s ، s ′)، بین دو سناریو روی یک مجموعه از اشیاء است. با جمعبندی ساده فاصله دو رابطه پایه در نمودار همسایگی مفهومی حساب درگیر محاسبه میشود. دب(سیمن ج،سی“من ج)دب(سیمن�،سیمن�“)بیش از همه محدودیت های مربوطه،
سپس شبکه حلشده Λ( Q ) با اتحاد سناریوهایی ساخته میشود که با محدودیتهای یکپارچگی سازگار، مطابقت دارند و طبق d ( s , s ) حداقل فاصله را با Q دارند (در نظر گرفتن اتحاد در اینجا به معنای ما یک شبکه جدید با در نظر گرفتن اتحاد همه محدودیت های مربوطه می سازیم.):
با
جایی که 〚Q Cن〛〚���〛مخفف مجموعه ای از تمام سناریوهایی است که با محدودیت های یکپارچگی سازگار و مطابقت دارند. به دنبال رویکردی که در [ 84 ] توضیح داده شد، Λ( Q ) را می توان با کاهش تدریجی محدودیت ها محاسبه کرد تا زمانی که حداقل یک سناریوی ثابت پیدا شود. این در الگوریتم 2 نشان داده شده است ، جایی که ما فرض می کنیم که تابع relax( Q , i )، مجموعه سناریوها، s را برمی گرداند که دارای فاصله d ( s ′, Q ) = i تا Q هستند.
نتیجه اعمال عملگر تفکیک به شبکه از شکل 11b در شکل 11c نشان داده شده است. جالب توجه است که مدل کیفی سازگار حاصل شامل دو تفکیک است که اساساً میگوید که رابطه بین پارک و iz 1 یا ec یا dc است. این نتیجه از این واقعیت است که هر دو مدل کیفی به یک اندازه به مدل ورودی نزدیک هستند، به طوری که نمی توان بین دو فرضیه تصمیم گیری کرد.
5.4. داده های مشاهده: شرح روایت شهری
با توجه به قابلیتهای انتزاع کیفی، تشخیص سازگاری و یکپارچهسازی (همانطور که تاکنون توضیح داده شد)، هدف اکنون تولید یک روایت مرتبشده زمانی از فرآیندهایی است که توسط مجموعه دادههای از پیش پردازش شده منعکس میشوند. قبل از مثال زدن روایت، برخی از نمادهای اساسی که از اینجا استفاده می کنیم به شرح زیر است:
نشانه گذاری
ما از یک زبان مرتبه اول استفاده می کنیم ( ل)(ℒ)با الفبای زیر: {¬، ∧، ∨، ∀، ∃، ⊃، ≡}. انواع (و متغیرهای متناظر) برای: رویدادها (Θ = { θ 1 , θ 2 , …, θ n })، نقاط زمانی وجود دارد ( تی= {تی1،تی2, … ,تیمن} )(تی={تی1،تی2،…،تیمن})، اشیاء فضایی ( O= {o1،o2، …,oj} )(�={�1،�2،…،��})، مناطق فضا ( اس={س1،س2، …,سک} )(اس={س1،س2،…،سک})و یک نماد تابع ( میزان : O→ اس�→اس) که مکان مکانی وابسته به زمان موجودیت را تعیین می کند. ما فقط روابط توپولوژیکی دوتایی مناطق فضایی گسترده در فضا را در نظر می گیریم. با این حال، این تئوری محاسبات فضایی مبتنی بر نقطه و بخش خطی را در بر می گیرد.
اجازه دهید آر={r1،r2، …,rn}آر={�1،�2،…،��}نشان دهنده یک فضای رابطه فضایی کیفی n- اری واقعی بر روی یک حساب فضایی کیفی دلخواه است. Φ = { ϕ 1 , ϕ 2 , …, ϕ l } مجموعه ای از فلوئنت های گزاره ای و کاربردی است، به عنوان مثال ϕ sp ( o i , o j ) ϵ Φ یک روان تابعی است که نشان دهنده رابطه فضایی از آرℛبین اشیاء o i و o j . گزاره رویداد ویژه، tran ( r i , o i , o j ) ϵ Θ، انتقال به یک رابطه فضایی r i را بین اشیاء o i و o j نشان می دهد. در نهایت، سه تایی نگه می دارد ( φ، r، t ) ⊂ [ Φ × R× تی][�×آر×تی]از گزاره برای مثال زدن ویژگی های زمانی استفاده می شود، و Happens ( θ, t ) نشان دهنده وقوع رویداد است. برای راحتی نماد، از قند نحوی زیر برای اصطلاحات روان استفاده میکنیم ( φ ): P ( ϕ ([ xi , …, xn ])) به r P تبدیل میشود ( ϕ ( x i )) ∧ … ∧ P ( ϕ )( x ن ))]. استفاده از [ xi , …, xn ] با عبارت رویداد (Θ) یک آرگومان برداری را نشان می دهد و متفاوت تفسیر می شود.
مشاهدات مرتب شده زمانی (پنج) در معادله (4) یک توصیف رسمی از خروجی ماژول استدلال و ادغام زمانی برای نقاط زمانی t 1 تا t 6 مربوط به عکس های فوری نشان داده شده در شش تصویر در شکل 10 را نشان می دهد. آنها زمینه را برای توصیف روایی سناریوی پویایی شهری مورد بررسی فراهم میکنند: (برای صرفهجویی در فضا، مشاهدات ارائهشده فقط آن واقعیتهایی را نشان میدهند که در یک مشاهده معین درست/نادرست میشوند. علاوه بر این، برخی از حقایق ضمنی حذف میشوند.)
توضیحات جزئی و پسوند
وقتی روابط فضایی ( فضای Φ ) بین برخی از اشیاء حذف می شود، می توان یک توصیف کامل (با برچسب های جداکننده) بر اساس قضایای ترکیب (بخش 5.5.1) و سایر محدودیت های یکپارچگی برای حوزه فضایی مورد بررسی استخراج کرد. در ادامه، ما در مورد درمان برای توصیف وضعیت جزئی با استفاده از مفهوم گسترش یکنواخت توضیح می دهیم. اجازه دهید Ω توصیف حالت فضایی جزئی را نشان دهد که شامل حقایقی است که با استفاده از گزاره Holds سه تایی بیان شده است. مفهوم زیر از “گسترش یکنواخت” ضروری است:
تعریف 5.1 (بسط یکنواخت) بسط یکنواخت یک توصیف حالت فضایی جزئی ، Ω، توصیف دیگری است ، Ω’، به طوری که Ω ⊂ Ω’، و تمام عناصر معنایی با توجه به اطلاعات مکانی موجود در Ω در Ω حفظ می شوند . . به دلیل کمبود فضا، تعریف رسمی شرط یکنواختی را کنار می گذاریم.
مجموعه مشاهدات (Ψ) ورودی یک جزء استدلال سطح بالا را تشکیل می دهد. در بخش بعدی، نظریه فضایی مستقل از حوزه رسمی را توسعه میدهیم که به عنوان مبنای استدلال یا، در این مورد خاص، برای استدلال ابداعی عملی در GIS استفاده میشود.
5.5. یک نظریه فضایی مستقل از دامنه
از دیدگاه سیستم های فضایی پویا، یک نظریه فضایی مستقل از حوزه (مهمترین آنها) شامل موارد زیر است: (1) جنبه های بدیهی سطح بالا که یک نظریه کیفی تغییر فضایی را مشخص می کند. (2) جنبه های پدیده ای ذاتی سیستم های پویا (جغرافیایی) فضایی [ 75 ]. ما این مفهوم کلی را برای حوزه دینامیک جغرافیایی تطبیق می دهیم.
5.5.1. خصوصیات بدیهی یک نظریه فضایی
محاسبات فضایی زیادی وجود دارد که هر کدام مربوط به جنبه متفاوتی از فضا هستند. در اینجا، کافی است به یک حوزه فضایی فکر کنیم، به عنوان مثال، توپولوژی، با بدیهیات mereotopological متناظر از طریق روابط باینری حساب RCC-8. از دیدگاه بدیهی، یک حساب فضایی که با توجه به فضای رابطه دلخواه تعریف شده است، آرℛ، دارای برخی خواص کلی است (در زیر در (P1–P5) توضیح داده شده است). برای هر محاسبات فضایی، می توان فرض کرد که (P1-P5) به طور پیشینی شناخته شده است ، به عنوان مثال ، این ویژگی های عمدی هستند که ساختار حساب را تعریف می کنند. برای تحقق یک نظریه فضایی مستقل از حوزه که می تواند برای استدلال (مثلاً ربوده شدن مکانی-زمانی) در حوزه های مختلف پویا (جغرافیایی) استفاده شود، لازم است که معناشناسی بدیهی سطح بالا این ویژگی های عمومی حفظ شود و به طور ضمنی، ویژگی های جبری زیربنایی، که در مجموع یک حساب فضایی کیفی را تشکیل می دهند. یک نظریه فضایی مستقل از حوزه ( فضای Σ ) را می توان با بدیهی سازی (P1-P5) به شرح زیر به دست آورد: متغیرها، r 1 ، …، rn ، مربوط به روابط فضایی کیفی مربوط به حساب فضایی در حال مدلسازی است. به عنوان مثال، در مورد فعلی، اینها را می توان به عنوان روابط توپولوژیکی RCC-8 { dc , ec , po , eq , tpp , ntpp , tpp -1 , ntpp -1 } تفسیر کرد.
(P1–P2). خصوصیات حساب دیفرانسیل و انتگرال (Σ cp )
آرℛدارای خاصیت مجزای مشترک جامع و جفتی (JEPD) است، به عنوان مثال ، برای هر دو نهاد در O�، یک و تنها یک رابطه فضایی از R در یک موقعیت معین برقرار است. جامعیت مشترک را می توان با استفاده از n قید حالت معمولی شکل در معادله (6a) بیان کرد.
به طور مشابه، [ n ( n -1)/2)] قیود شکل در معادله (6b) برای بیان جدایی جفتی n رابطه کافی است. سایر خصوصیات متفرقه مانند معادله تقارن (7a) و معادله عدم تقارن (7b) روابط پایه نیز می توانند با استفاده از قیود معمولی بیان شوند.
(P3). همسایگی مفهومی (Σ cn )
همانطور که اشاره کردیم، روابط اولیه یک حساب کیفی دارای ساختار پیوستگی است که به عنوان همسایگی مفهومی آن (CND) از آن یاد می شود (نگاه کنید به [ 68 ، 69 ، 85 ])، که تغییرات مستقیم و پیوسته را در فضای کیفیت تعیین می کند (به عنوان مثال، با تغییر شکل و/یا حرکت انتقالی). محمول دوتایی (انعکاسی)، همسایه ( r، r ′)، نشان دهنده رابطه پیوستگی بین روابط r و r است.
محدودیتهای پیوستگی فقط در سناریوهای مربوط به تداوم مکانی-زمانی (به عنوان مثال، پدیده انتشار، حرکت در (جغرافیایی)فضا) مفید هستند و ممکن است نقش مفیدی در درونیابی و پیشبینی مکانی-زمانی داشته باشند، بهویژه در سناریوهایی که دادههای موجود ناقص هستند و/ یا مستعد خطا
(P4). قضایای ترکیب (Σ ct )
از دیدگاه بدیهی، یک حساب فضایی تعریف شده است آرℛ(در درجه اول) بر اساس مشتق مجموعه ای از قضایای ترکیب بین مجموعه JEPD است، آرℛ(بخش 3). به طور کلی، برای یک حساب (مکانی، زمانی یا مکانی-زمانی) متشکل از n رابطه JEPD ( به عنوان مثال ، n = | آر|�=|ℛ|، [ n × n ] ترکیبات از قبل محاسبه شده اند. هر یک از این قضایای ترکیب معادل معادله محدودیت حالت معمولی (9) است که هر توصیف موقعیت مکانی باید آن را برآورده کند.
(P5). بدیهیات تعامل (Σ ai )
اینها زمانی قابل اجرا هستند که بیش از یک حساب فضایی به روشی غیر یکپارچه مدل شده باشد (به عنوان مثال ، با قضایای ترکیب مستقل). این بدیهیات به صراحت دلبستگی های نسبی بین جنبه های وابسته به هم فضا، به عنوان مثال، توپولوژی و اندازه را مشخص می کند ( جدول 1 و 2 ). به عنوان مثال، یک رابطه فضایی از یک نوع ممکن است مستقیماً مستلزم یا محدود کردن یک رابطه فضایی از نوع دیگر معادله (10a) باشد. چنین بدیهیاتی احتمالاً میتوانند ماهیت ترکیبی داشته باشند، و ایجاد روابط فضایی مربوط به دو جنبه مختلف فضا را ممکن میسازد تا یک رابطه فضایی از یک یا هر دو نوع فضایی مورد استفاده در معادله ترکیب (10b) به دست آید .
5.5.2. جنبه های پدیدار: رویدادهای جغرافیایی (Σ ph )
در اینجا، ما تفسیر نمونه خود را برای رویدادهای جغرافیایی بر اساس توصیف معنایی در بخش 4.1 تعریف می کنیم. این تعاریف همچنین از نمادهای تابع بولی اضافی (دودویی) – merge_cond و split_cond – استفاده می کنند که به طور فرامنطقی (مثلاً به معنای هندسی) شرایط مورد نیاز برای بررسی رویدادها را تعریف می کنند. (خارج از نظریه منطقی، شرایط ادغام و تقسیم اساساً عملیات هندسی هستند که ممکن است ویژگی دلخواه داشته باشند.)
ظهور و ناپدید شدن
این سادهترین حالت است، که در آن وضعیت وجودی یک شی دستخوش تغییر معادله (11) میشود . در اینجا، فرض میکنیم که هویت خارج از چارچوب استدلال انجام میشود.
شکاف
یک تقسیم شامل یک شی موجود است که به مجموعهای از n شیء که قبلاً وجود نداشتند تجزیه میشود. معادله (12) :
ادغام
یک رویداد ادغام معادله (13) (رسمی به عنوان) یک رویداد دوگانه تقسیم است:
فرض کنید فضای Σ ≡ def [Σ cp ∪ Σ cn ∪ Σ ct ∪ Σ ai ∪ Σ ph ] یک نظریه فضایی مستقل از حوزه را نشان می دهد که بر اساس بدیهیات شامل (P1-P5) و جنبه های پدیدار در Σ ph است.
5.5.3. سناریوهای قابل قبول فیزیکی
مربوط به هر موقعیت مکانی (به عنوان مثال، در فضای موقعیت فرضی؛ شکل 5 )، یک توصیف موقعیت وجود دارد که وضعیت فضایی سیستم را مشخص می کند. لازم است که جزء فضایی چنین حالتی یک «مشخصات کامل» باشد، احتمالاً با اطلاعات جداکننده. برای k محاسبات فضایی (دودویی) در حال مدلسازی، توصیف وضعیت اولیه شامل n شی دامنه نیاز به یک مشخصات کامل با [ n ( n -1)/2] روابط فضایی برای هر حساب دارد (دقیقاً، تحت یک فرض نام منحصر به فرد برای مسلطها در Φ ( یعنی [ ϕ sp ( o i , oj ) ≠ ϕ sp ( o j , o i )])، واقعیت پیکربندی های فضایی ایستا شامل [( k × [ n ( n − 1)/2] × 2 ] روان عملکردی منحصر به فرد است.
تعریف 5.2 ( سیسی-ثبات) شرح صحنه است سیسی-سازگار، به عنوان مثال، از نظر ترکیبی سازگار است، در صورتی که توصیف وضعیت یا موقعیت مکانی متناظر با موقعیت، تمامی محدودیتهای ترکیب (P4 در بخش 5.5.1؛ بخش 5.5) از هر حوزه فضایی (به عنوان مثال، توپولوژی، جهتگیری، اندازه) را که مدلسازی میشود برآورده کند. و همچنین ملزومات نسبی، بر اساس بدیهیات تعامل (P5 در بخش 5.5.1 و جداول 1 و 2 ؛ بخش 5.5) در میان محاسبات فضایی وابسته به یکدیگر زمانی که بیش از یک حساب فضایی مدلسازی میشود.
به یاد بیاورید که محدودیت های ترکیب و بدیهیات تعامل به عنوان بخشی از نظریه فضایی مستقل از حوزه رسمیت یافته است (P4-P5 در بخش 5.5.1؛ بخش 5.5). سیسی-Consistencyin Definition 5.2 تضمین میکند که توصیفات صحنه ( یعنی پیکربندیهای فضایی کیفی آنها) که از نظر فیزیکی امکانپذیر نیستند، در طول فرآیند استدلال نادیده گرفته میشوند. از منظر حذف الگوی توصیفات روایی در طی یک فرآیند تبیین (ابدایی)، سیسی– سازگاری توصیفات سناریو یک عامل کلیدی (مشارکت کننده) است که مفهوم عامیانه تحقق فیزیکی کامل شدن سناریو (ربوده شده) را تعیین می کند. (بات و لوک [ 75 ] نشان میدهند که یک معناشناسی تکمیل استاندارد با کمینهسازی علّی در حضور مفروضات چارچوب و محدودیتهای فرعی، چه با استفاده از محدودیت یا تکمیل محمول، این مفهوم را حفظ میکند. سیسیسازگاری فضای Σ در یک کلاس کلی از نظریه های کنش. جزئیات در اینجا غیر ضروری هستند.)
5.6. Abduction عملی در GIS با فضای Σ
فرض کنید Σ تئوری پسزمینه و Φ یک جمله مشاهدهای باشد که همسانسازی آن نیاز به توضیح دارد. با توجه به رویکرد ابداکتیو به توضیحات محاسباتی، وظیفه جذب Φ شامل یافتن فرمول Δ است که وقتی به Σ متصل می شود، Φ را به عنوان یک نتیجه منطقی به دست می آورد ( یعنی Σ∪ Δ⊨ Φ).
ضمیمه A جزئیات رویکرد ابداکتیو دقیق را برای توضیحات محاسباتی ارائه می دهد، زیرا جزئیات برای این مقاله مرکزی نیستند. درعوض، ما بر توضیح ماهیت ابدابیبلهای مستقل از دامنه سطح بالا که در نتیجه فرآیند استدلال در بخشهای 5.6.1-5.6.3 ایجاد میشوند، تمرکز میکنیم.
5.6.1. ربودن ظاهر و ناپدید شدن
موارد زیر با توجه به تصویر در شکل 5 نشان داده شده است : در معادلات (14) و (15) ، تغییر Σ مربوط به یک دسته کلی از تئوری های کنش است (به عنوان مثال، به روشی که در [ 75 ] توضیح داده شده است) که قادر به مدیریت قاب و مشکلات انشعاب : قوانین کلی که تعیین می کنند چه چیزی در یک سیستم به طور پویا تغییر می کند و چه چیزی تغییر نمی کند. جزئیات برای درک نتیجه روش های آدم ربایی ضروری نیست.
اشتقاق Δ اساساً شامل استدلال غیر یکنواخت به شکل به حداقل رساندن تغییر (گزارههای « علت » و « رویداد »)، علاوه بر ایجاد فرضیات پیشفرض معمول در مورد اینرسی و اثرات غیرمستقیم است. جزئیات خارج از محدوده این مقاله است و ممکن است در [ 75 ] اشاره شود.
5.6.2. ربودن تقسیم و ادغام
در زیر، Δ2 زیرمجموعه ای از توضیحات حداقل را نشان می دهد که با توجه به مشاهدات در Ψ e و Ψ f قابل استخراج است :
به روشی که از لحاظ روششناختی مشابه مورد رویدادهای زمینفضایی که تاکنون مشخص شدهاند، رویدادهایی مانند رشد ، انقباض و تحولات اساسی و رویدادهای شبیهسازی ممکن است در معرض تفاسیر مشخصی نیز قرار گیرند.
به عنوان گام بعدی در فرآیند استدلال، به موضوع استخراج دانش سطح بالا و خاص دامنه از نتیجه کار تکمیل سناریو و روایت می پردازیم.
5.6.3. استنتاج فرآیندهای شهرنشینی سطح بالا (وابسته به دامنه).
بحث تا کنون بر روی ماشینهای مستقل از حوزه مورد نیاز برای بازنمایی کیفی و استدلال در مورد جنبههای خاصی از پدیدههای دینامیکی (جغرافیایی) متمرکز شده است. اکنون به حوزه پویایی شهری می پردازیم که تمرکز مثال در حال اجرا ماست. فرآیندهای شهرنشینی در سطح بالا (به عنوان مثال، طبیعی، انسانی، اقتصادی) در این حوزه ممکن است از طریق ترکیبی از تغییرات کیفی فضایی مستقل از حوزه سطح پایین و رویدادهای جغرافیایی قابل شناسایی بر اساس طبقهبندی رویداد مشخص مشخص شوند. در حوزه مثال 5.1، اینها با فرآیندهای شهرنشینی، مانند: جنگل زدایی، مهاجرت، بازسازی شهری/روستایی (ساخت و ساز) و جابجایی، صنعتی شدن و توسعه زیرساخت ها و غیره مطابقت دارند . با توجه به سناریوی اولیه/مستقل از دامنه و تکمیلهای روایت (بهدستآمده از طریق آدمربایی) در [Δi , Δj , …, Δ Δn]، ممکن است از ابداکی پذیرهای سطح بالا به شیوه ای خاص دامنه برای استنباط فرآیندهای مورد علاقه استفاده شود (به عنوان مثال، این ابداکیبل ها ممکن است در محیط مبتنی بر پرس و جو استاندارد بر روی یک مجموعه داده GIS معمولی ساخته شوند). برای مثال، معادله (16) ابداکی پذیرهای سطح بالا (اشاره به فرآیندهای سطح بالا) را می توان با توجه به ابداکشن های اولیه در معادلات (14) و (15) استنباط کرد :
مجموعه ای از ابدایی پذیرهای سطح بالا (وابسته به دامنه) ممکن است به صورت پویا در یک محیط مبتنی بر پرس و جو ساخته شوند یا ممکن است از قبل مشخص شده و از طریق مکانیزم واسط که قابلیت تحلیلی را با سهامداران واقعی در فرآیند تحلیلی متصل می کند، احضار شوند. . این به کاربران و سرویسهای نرمافزاری که از معماری GIS مبتنی بر روایت استفاده میکنند، قادر میسازد تا به طور مستقل معنای پدیدههای مکانی-زمانی را به روشهای دامنه خاص تعریف کنند.
به عنوان مثال (با تکیه بر استدلال ارائه شده توسط یکی از داوران این مقاله)، یک ابدایی ویژه دامنه سطح بالا می تواند نیروهای اجتماعی و اقتصادی (به عنوان مثال، اصیل سازی، تراکم صنعتی ) را مشخص کند که چنین بیان فضایی توسعه شهری را به سمتی سوق داده است. فی نفسه رخ می دهد . چنین پیوندی از فرآیندهای جغرافیایی پیچیده و/یا تفسیر ذهنی سطح بالا، مانند تجمع صنعتی به دادههای مکانی-زمانی که ویژگیهای قابل مشاهده را به آسانی ثبت میکنند (مثلاً از طریق تصاویر ماهوارهای و استفاده از زمین )، به ملاحظات خاص مشکل بستگی دارد:
- یک تحلیلگر ممکن است تصمیم بگیرد که فرآیندهای مکانی-زمانی قابل مشاهده (مثلاً کوچک شدن ، شکافتن ، ناپدید شدن ) را با پدیدههای پیچیده اجتماعی-مکانی، مانند شهرنشینی ، کاملاً مرتبط کند.
- تحلیل مکانی-زمانی (به عنوان مثال، رشد یا کوچک شدن مداوم یک چند ضلعی) ممکن است با سایر منابع داده تکمیل شود، و تأثیر مجموعه دادههای غیرمکانی و روشهای تحلیلی کمی میتواند به طور رسمی در چارچوب روایت به حساب بیاید، به طوری که توضیح ابداعی چارچوب از هر دو فضای زمانی و همچنین انواع دیگر ابدایی پذیرها تشکیل شده است (به عنوان مثال ، شواهد غیر مکانی را می توان برای غنی سازی بیشتر تفسیر فرآیندهای کلان مکانی استفاده کرد).
همانطور که قبلاً در مقاله مورد بحث قرار گرفت، تمرکز مدل روایت محور این مقاله بر جنبههای مکانی-زمانی پدیدههای جغرافیایی پویا بوده است. برخورد رسمی با ترکیب مجموعه دادههای غیرمکانی به عنوان شواهد در فرآیند توضیح، اگرچه ممکن است، خارج از محدوده این مقاله است. تمرکز ما بر روی استفاده از روشهای رسمی از حوزه استدلال عقل سلیم در مورد فضا، اقدامات و تغییر به حوزه GIS پویا بوده است.
6. بحث و نتیجه گیری
توانایی توانایی تحلیلی معنایی و کیفی برای تکمیل و هم افزایی با روش های آماری و کمی محور، در داخل و خارج از محدوده دامنه های کاربردی GIS مهم شناخته شده است (در بخش 2.1 بحث شد). محققان در GIS و نظریه اطلاعات مکانی چندین جنبه هستیشناختی بنیادی را در مورد مدلسازی رویدادها، فرآیندها، توسعه عملی طبقهبندی رویدادهای مربوط به یک بافت مکانی و ساخت روشهای رسمی در نظریه اطلاعات مکانی کیفی بررسی کردهاند.
همانطور که تاکید کردیم، تجزیه و تحلیل توضیحی مبتنی بر رویداد و شی از اهمیت ویژه ای برخوردار است (به عنوان مثال، در زمینه یک سیستم GIS مبتنی بر پرس و جو)، که در آن داده های موجود باید برای اهداف مختلف، مانند تصمیم گیری مدیریتی، خط مشی، تجزیه و تحلیل شوند. تشکیل و غیره در واقع، توسعه قابلیت تحلیلی سطح بالا در سیستم های اطلاعات جغرافیایی شی در حال ظهور ، زمانی و مبتنی بر رویداد برای ارائه طیفی از چالش های بازنمایی و محاسباتی اساسی شناسایی شده است. هدف این مقاله این بوده است که:
به صراحت به برخی از این چالش ها از منظر کاربرد روش های بازنمایی دانش رسمی و استدلال در مورد فضا ، رویدادها ، اعمال و تغییر بپردازید.
سوال فنی گسترده ای که در این مقاله به آن پرداخته شده است:
چه چیزی هسته انفورماتیک فضایی زیربنایی (انواع خاص) قابلیت تحلیلی در طیف وسیعی از حوزه های جغرافیایی پویا را تشکیل می دهد؟
از دیدگاه روش شناختی، هدف عینی پژوهش ما این بوده است:
بررسی مبانی نظری لازم برای توسعه قابلیت محاسباتی برای سطح بالا، تجزیه و تحلیل کیفی پدیدههای جغرافیایی پویا در سیستمهای GIS مبتنی بر رویداد و شیء.
ما چارچوبی فراگیر برای مدلسازی سطح بالا و تحلیلهای توضیحی روایت محور در حوزه جغرافیایی ارائه کردهایم و نمای واحدی از یک معماری تلفیقی را در پسزمینه یک سناریوی کاربردی مصور از حوزه پویایی شهری ارائه کردهایم. با تکیه بر پایههای موجود در جامعه GIS، و بهویژه نظریه اطلاعات مکانی، چالشهای اساسی را نشان داده و راهحلهایی برای آن ارائه کردهایم که شامل جنبههایی مانند انتزاع و ادغام کیفی ، سازگاری فضایی و ربودن مکانی عملی در یک محیط منطقی است.
مهمتر از همه، ما معتقدیم که از زیرشاخههای کلاسیک بازنمایی و استدلال دانش (KR) در هوش مصنوعی، بهویژه روشهای رسمی در استدلال مکانی و زمانی، استدلال در مورد کنش و تغییر و استدلال عقل سلیم، تهاجماتی ایجاد کردهایم. ما بر این باوریم که این هجومهای میان رشتهای در علم GIS، فرصتهای جالبی را برای تحقق نسل بعدی سیستمهای نرمافزار تحلیلی GIS باز میکند. از دیدگاه موضوعی، ما پیشنهاد میکنیم که این امر به ویژه نیازمند یک دیدگاه علمی فرا رشتهای است که جغرافیا، هوش مصنوعی و علوم شناختی را گرد هم میآورد.
ضمیمه
توضیحات محاسباتی: ربایش مبتنی بر منطق در GIS
اجازه دهید Σ یک نظریه پسزمینه باشد و Φ یک جمله مشاهدهای، که جذب آن نیاز به توضیح دارد. با توجه به رویکرد ابداکتیو، وظیفه جذب Φ شامل یافتن فرمولهای Δ است که وقتی به Σ متصل میشوند، ف را به عنوان یک نتیجه منطقی به دست میآورند ( یعنی Σ∪ Δ⊨ Φ). علاوه بر این، مجموعهای از محمولها بهمنظور اجتناب از توضیحهای بیاهمیت ، بهعنوان قابل ابداعی متمایز میشوند. ضروری است که توضیح، Δ، باید بر حسب محمولاتی باشد که به عنوان قابل ابداعی تعیین شده اند . در نهایت، رویکردی لازم است تا اثرات غیرمستقیم و غیرمستقیم رویدادها و کنشها را در بر بگیرد و در نتیجه بر مشکلات چارچوب و پیامد غلبه کند. این امر با استفاده از یک خط مشی کمینه سازی مرتبط، که معمولاً شامل استفاده از آن است، به دست می آیدمحدودیت (CIRC) [ 86 ]. ضمناً لازم است که تبیین حداقل باشد، یعنی تبیین مشتق شده نباید مشمول توضیحات دیگری شود. تعریف (6.1) مفهوم رایج توضیح را با ربودن منطقی رسمیت می بخشد [ 76 ].
تعریف 6.1 (توضیح) یک فرمول، Δ، اساساً یک گزاره وجودی، توضیحی است برای یک جمله مشاهده زمینی، Φ obs ، از زبان. Lℒاز نظر خط مشی آدم ربایی، η * ، با توجه به یک نظریه پس زمینه [Σ ≡ Σ تغییر ∪ Σ فضا ] و یک خط مشی محدودیت که ρ * را به حداقل می رساند و اجازه می دهد σ * تغییر کند اگر:
- CIRC[Σ ∧ Δ; ρ * ; σ * ] سازگار است، و خود مدل ها هم هستند سیسی-سازگار (طبق تعریف 5.2)،
- Δ فقط محمولات را در η * و ذکر می کند
- CIRC[Σ ^ Δ ; ρ * ; σ * ] ⊨ Φ obs
- هیچ توضیحی Δ′ از Φ obs وجود ندارد ، به طوری که Δ⊨ Δ′ و Δ′ ⊭ Δ ( یعنی معیارهای حداقلی).
منابع
- کلارامونت، سی. Thériault، M. مدیریت زمان در GIS: رویکرد رویداد محور، مجموعه مقالات کارگاه بین المللی پایگاه های داده زمانی، زوریخ، سوئیس، 17-18 سپتامبر 1995. ص 23-42.
- یوان، م. Hornsby، K. محاسبات و تجسم برای درک دینامیک در حوزههای جغرافیایی-یک دستور کار تحقیقاتی . CRC Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2007. [ Google Scholar ]
- Yuan, M. نمایش پدیده های پیچیده جغرافیایی در GIS. کارتوگر. Geogr. به اطلاع رساندن. علمی 2001 ، 28 ، 83-96. [ Google Scholar ]
- چارچوب ایده بزرگ ؛ نیما (آژانس ملی تصویربرداری و نقشه برداری): اسپرینگفیلد، ویرجینیا، ایالات متحده آمریکا، 2000.
- Beller, A. Spatio/Temporal Events in a GIS, Proceedings of the GIS/LIS, Atlanta, GA, USA, 28 اکتبر – 1 نوامبر 1991; صص 766-775.
- گرنون، پی. اسمیت، بی. اسنپ و گستره: به سوی هستی شناسی فضایی پویا. تف کردن شناخت. محاسبه کنید. 2004 ، 4 ، 69-104. [ Google Scholar ]
- Worboys، MF; Hornsby، K. از اشیا تا رویدادها: Gem، مدل رویداد جغرافیایی. لکت. توجه داشته باشید. محاسبه کنید. علمی 2004 ، 3234 ، 327-344. [ Google Scholar ]
- گالتون، ا. میزوگوچی، آر. آب می افتد اما آبشار نمی افتد: دیدگاه های جدید در مورد اشیاء، فرآیندها و رویدادها. Appl. اونتول. 2009 ، 4 ، 71-107. [ Google Scholar ]
- Hornsby، KS; کول، اس جی مدل سازی اجسام مکانی متحرک از دیدگاه مبتنی بر رویداد. ترانس. GIS 2007 ، 11 ، 555-573. [ Google Scholar ]
- بنت، بی. هویت و ابهام اشیاء فیزیکی، مجموعه مقالات هشتمین کنفرانس بین المللی اصول بازنمایی و استدلال دانش (KR2002)، تولوز، فرانسه، 22-25 آوریل 2002. صص 395-408.
- هورنسبی، ک. Egenhofer، MJ تغییر مبتنی بر هویت: پایه ای برای بازنمایی دانش مکانی-زمانی. بین المللی جی. جئوگر. Inf. علمی 2000 ، 14 ، 207-224. [ Google Scholar ]
- گالتون، ا. هود، جی. درونیابی کیفی برای بازنمایی دانش محیطی، مجموعه مقالات کنفرانس اروپایی در زمینه هوش مصنوعی (ECAI)، والنسیا، اسپانیا، 23 تا 27 اوت 2013. ص 1017–1018.
- موندو، جی دی؛ استل، جی جی. کلارامونت، سی. Thibaud، R. یک مدل نمودار برای تکامل مکانی-زمانی. J. UCS 2010 ، 16 ، 1452-1477. [ Google Scholar ]
- Worboys، MF رویکردهای رویداد محور به پدیده های جغرافیایی. بین المللی جی. جئوگر. Inf. علمی 2005 ، 19 ، 1-28. [ Google Scholar ]
- کوکللیس، اچ. ربودن علم اطلاعات جغرافیایی: انتقال استدلال فضایی به قلمرو هدف و طراحی. لکت. توجه داشته باشید. محاسبه کنید. علمی 2009 ، 5756 ، 342-356. [ Google Scholar ]
- میلر، آر. شاناهان، م. روایات در حساب موقعیت. J. Log. محاسبه کنید. 1994 ، 4 ، 513-530. [ Google Scholar ]
- پینتو، جی. رخدادها و روایت ها به عنوان محدودیت در ساختار انشعاب حساب موقعیت. J. Log. محاسبه کنید. 1998 ، 8 ، 777-808. [ Google Scholar ]
- مولر، ET مدلسازی فضا و زمان در روایتهایی درباره رستورانها. LLC 2007 ، 22 ، 67-84. [ Google Scholar ]
- مک کارتی، جی. کاستلو، تی. ترکیب روایات، مجموعه مقالات ششمین کنفرانس بین المللی اصول بازنمایی و استدلال دانش، ترنتو، ایتالیا، 2 تا 5 ژوئن 1998. ص 48-59.
- مک کارتی، جی. فصل مفهوم هوش مصنوعی منطقی. در هوش مصنوعی مبتنی بر منطق ؛ Kluwer Academic Publishers: Norwell, MA, USA, 2000; صص 37-56. [ Google Scholar ]
- فیشر، WR Human Communication به عنوان روایت: به سوی فلسفه عقل، ارزش و عمل . انتشارات دانشگاه کارولینای جنوبی: کلمبیا، SC، ایالات متحده آمریکا، 1987. [ Google Scholar ]
- Riessman، CK تحلیل روایت ; انتشارات سیج: پارک نیوبوری، کالیفرنیا، ایالات متحده آمریکا، 1993. [ Google Scholar ]
- پرنس، جی . روایت شناسی: شکل و کارکرد روایت . Mouton De Gruyter: برلین، آلمان، 1982. [ Google Scholar ]
- هرمان، دی. جان، م. رایان، ام.-ال. راتلج دایره المعارف نظریه روایت ; Routledge: لندن، انگلستان، 2005. [ Google Scholar ]
- مایستر، JC روایت شناسی. در کتاب راهنمای زنده روایت شناسی ; Hühn, P., Meister, JC, Pier, J., Schmid, W., Eds.; انتشارات دانشگاه هامبورگ: هامبورگ، آلمان، 2011. [ Google Scholar ]
- بارت، آر. دویسیت، ال. مقدمه ای بر تحلیل ساختاری روایت. نور جدید. تاریخچه 1975 ، 6 ، 237-272. [ Google Scholar ]
- مانی، اول. مدلسازی محاسباتی روایت. مصنوعی. لکت. هوم لنگ تکنولوژی 2012 ، 5 ، 1-142. [ Google Scholar ]
- مانی، اول. روایت شناسی محاسباتی. در کتاب راهنمای زنده روایت شناسی ; Hühn, P., Meister, JC, Pier, J., Schmid, W., Eds.; انتشارات دانشگاه هامبورگ: هامبورگ، آلمان، 2013. [ Google Scholar ]
- گوگوئن، ج. نور جدید. خود. 2004. در دسترس آنلاین: http://cseweb.ucsd.edu/goguen/courses/87w04/1.html در 13 دسامبر 2013 قابل دسترسی است. [ Google Scholar ]
- بات، ام. استدلال در مورد فضا، اقدامات و تغییر: پارادایم برای کاربردهای استدلال فضایی. در بازنمایی و استدلال فضایی کیفی: روندها و جهت گیری های آینده . IGI Global: Hershey، PA، USA، 2012. [ Google Scholar ]
- بهات، ام. گوسگن، اچ. وولفل، اس. Hazarika، S. استدلال مکانی و زمانی کیفی: برنامه های کاربردی، روندها و جهت گیری های در حال ظهور. تف کردن شناخت. محاسبه کنید. 2011 ، 11 ، 1-14. [ Google Scholar ]
- Cohn، AG; Renz, J. استدلال فضایی کیفی. در راهنمای بازنمایی دانش ; van Harmelen, F., Lifschitz, V., Porter, B., Eds. الزویر: آمستردام، هلند، 2007. [ Google Scholar ]
- یوان، م. مارک، DM; Egenhofer، MJ; Peuquet, DJ Chapter 5 Extensions to Representations Geographic. در یک دستور کار تحقیقاتی برای علم اطلاعات جغرافیایی ; CRC Press: Boca Raton، FL، USA، 2004; صص 129-156. [ Google Scholar ]
- Tobler, W. یک فیلم کامپیوتری شبیه سازی رشد شهری در منطقه دیترویت. اقتصاد Geogr. 1970 ، 46 ، 234-240. [ Google Scholar ]
- Tobler، WR Cellular Geography. در فلسفه در جغرافیا ; Gale, S., Olsson, G., Eds. Reidel: دوردرخت، هلند، 1979; صص 379-386. [ Google Scholar ]
- Couclelis، H. جهان های سلولی: چارچوبی برای مدل سازی دینامیک میکرو کلان. محیط زیست طرح. A 1985 , 17 , 585-596. [ Google Scholar ]
- برتاگنول، آ. داودت، ای. Pumain، D. از نظریه تا مدل سازی: سیستم های شهری به عنوان سیستم های پیچیده. CyberGeo Eur. جی. جئوگر. 2006 ، 335 ، 1-17. [ Google Scholar ]
- Batty، M. پنجاه سال مدلسازی شهری: کلان استاتیک تا میکرو دینامیک. در پویایی سیستم های پیچیده شهری ; آلبریو، اس.، آندری، دی.، جوردانو، پی.، ونچری، آ.، ویرایش. Physica-Verlag HD: هایدلبرگ، آلمان، 2008; صص 1-20. [ Google Scholar ]
- مدل سازی شهری مبتنی بر GIS سوئی، DZ: شیوه ها، مشکل و چشم اندازها. بین المللی جی. جئوگر. Inf. علمی 1998 ، 12 ، 651-671. [ Google Scholar ]
- بریاسولیس، اچ. سیاست کاربری و برنامه ریزی، نظریه پردازی و مدل سازی: در ترجمه گم شده، در پیچیدگی یافت می شود؟ محیط زیست طرح. B طرح. دس 2008 ، 35 ، 16-33. [ Google Scholar ]
- کوکللیس، اچ. آینده کجا رفته است؟ بازاندیشی در نقش مدلهای کاربری یکپارچه زمین در برنامهریزی فضایی. محیط زیست طرح. A 2005 , 37 , 1353-1371. [ Google Scholar ]
- استیونز، دی. دراگیسویچ، اس. Rothley، K. iCity: یک ابزار مدل سازی GIS-CA برای برنامه ریزی شهری و تصمیم گیری. محیط زیست مدل. نرم افزار 2007 ، 22 ، 761-773. [ Google Scholar ]
- ورمیرن، ک. Rompaey، AV; لوپمنز، ام. سرواجا، ای. Mukwaya، P. رشد شهری کامپالا، اوگاندا: تجزیه و تحلیل الگو و توسعه سناریو. Landsc. طرح شهری. 2012 ، 106 ، 199-206. [ Google Scholar ]
- ارسنجانی، ج. هلبیچ، ام. کاینز، دبلیو. Boloorani، AD ادغام مدلهای رگرسیون لجستیک، زنجیره مارکوف و اتوماتای سلولی برای شبیهسازی گسترش شهری. بین المللی J. Appl. زمین Obs. Geoinf. 2013 ، 21 ، 265-275. [ Google Scholar ]
- راماچاندرا، تی. آیتال، بی اچ. Sanna، DD بینش به پویایی شهری از طریق تجزیه و تحلیل الگوی فضایی منظر. بین المللی J. Appl. زمین Obs. Geoinf. 2012 ، 18 ، 329-343. [ Google Scholar ]
- کنگ، اف. یین، اچ. ناکاگوشی، ن. James, P. شبیه سازی فرآیندهای رشد شهری با ترکیب یک مدل بالقوه با معیارهای فضایی. Ecol. اندیک. 2012 ، 20 ، 82-91. [ Google Scholar ]
- ون کوون، اف. Schot، PP; Wassen, MJ چارچوبی برای پیوند مدل های شبیه سازی پیشرفته با نقشه های شناختی تعاملی. محیط زیست مدل. نرم افزار 2008 ، 23 ، 1133-1144. [ Google Scholar ]
- وبر، سی. کاربرد مدل تعامل برای برنامه ریزی شهری. Landsc. طرح شهری. 2003 ، 63 ، 49-60. [ Google Scholar ]
- آلن، JF حفظ دانش در مورد فواصل زمانی. اشتراک. ACM 1983 ، 26 ، 832-843. [ Google Scholar ]
- فرکسا، سی. استدلال فضایی کیفی. در جنبه های شناختی و زبانی فضای جغرافیایی ; Mark, D., Frank, A., Eds. Kluwer: Dordrecht، هلند، 1991; صص 361-372. [ Google Scholar ]
- رنز، جی. نبل، ب. استدلال فضایی کیفی با استفاده از محاسبات محدودیت. در کتاب راهنمای منطق فضایی. ; Springer Verlag: برلین، آلمان، 2007; صص 161-215. [ Google Scholar ]
- Peuquet, DJ بازنمایی فضای جغرافیایی: به سوی یک سنتز مفهومی. ان دانشیار صبح. Geogr. 1988 ، 78 ، 373-394. [ Google Scholar ]
- منیس، جی. Peuquet, DJ; Qian, L. چارچوب مفهومی برای ترکیب اصول شناختی در بازنمایی پایگاه داده جغرافیایی. بین المللی جی. جئوگر. Inf. علمی 2000 ، 14 ، 501-520. [ Google Scholar ]
- گهگان، م. تعیین تحولات درون و بین مدل های داده های جغرافیایی. ترانس. GIS 1996 ، 1 ، 137-152. [ Google Scholar ]
- Egenhofer، MJ; Franzosa، RD Point مجموعه روابط توپولوژیکی. بین المللی جی. جئوگر. Inf. سیستم 1991 ، 5 ، 161-174. [ Google Scholar ]
- اگنهوفر، ام. مارک، دی. جغرافیای ساده لوحانه. در نظریه اطلاعات مکانی مبنای نظری برای GIS ; Springer: برلین/هایدلبرگ، آلمان، 1995; صص 1-15. [ Google Scholar ]
- راندل، دی. کوی، ز. Cohn، A. یک منطق فضایی مبتنی بر مناطق و اتصال، مجموعه مقالات سومین کنفرانس بین المللی اصول بازنمایی و استدلال دانش، کمبریج، MA، ایالات متحده آمریکا، 25-29 اکتبر 1992. صص 165-176.
- Egenhofer، MJ استدلال در مورد روابط توپولوژیکی باینری. لکت. توجه داشته باشید. محاسبه کنید. علمی 1991 ، 525 ، 143-160. [ Google Scholar ]
- کلمنتینی، ای. شارما، جی. Egenhofer، MJ مدل سازی روابط فضایی توپولوژیکی: استراتژی هایی برای پردازش پرس و جو. محاسبه کنید. نمودار. 1994 ، 18 ، 815-822. [ Google Scholar ]
- عبدالموتی، هوش مصنوعی؛ اسمارت، پ. الگریسی، بی. جونز، سی. چارچوب های پشتیبانی برای وب معنایی جغرافیایی، مجموعه مقالات یازدهمین سمپوزیوم بین المللی پیشرفت در پایگاه های داده مکانی و زمانی، آلبورگ، دانمارک، 8-10 ژوئیه 2009. صص 355-372.
- کلارامونت، سی. تریو، ام. والد، ج. بازنمایی کیفی موجودات فضایی در حال تکامل در فضاهای دو بعدی. در نوآوری در GIS V ; کارور، اس.، اد. تیلور و فرانسیس: لندن، بریتانیا، 1997; صص 119-129. [ Google Scholar ]
- کلیپل، ا. وربویز، م. داکهام، ام. شناسایی عوامل مفهومسازی رویداد جغرافیایی. بین المللی جی. جئوگر. Inf. علمی 2008 ، 22 ، 183-204. [ Google Scholar ]
- جیانگ، جی. Worboys, M. Detecting Basic Topological Changes in Sensor Networks by Local Aggregation, مجموعه مقالات شانزدهمین کنفرانس بین المللی ACM در مورد پیشرفت در سیستم های اطلاعات جغرافیایی. صص 1-10.
- داکهام، ام. جونگ، ام.-اچ. لی، اس. Renz، J. جستجوی غیرمتمرکز روابط توپولوژیکی بین مناطق بدون استفاده از محلیسازی، مجموعه مقالات هجدهمین ACM SIGSPATIAL GIS، سان خوزه، کالیفرنیا، ایالات متحده آمریکا، 2-5 نوامبر 2010. ص 414-417.
- هارسلو، وی. Möller, R. Spatioterminological Reasoning: Subsumption بر اساس استنتاج های هندسی، مجموعه مقالات کارگاه بین المللی منطق های توصیف (DL’97)، Gif sur Yvette، فرانسه، 27-29 سپتامبر 1997; Levy, AY, Rousset, M.-C., Eds.; 410، صص 74-78.
- خان، ا. اشنایدر، M. استدلال توپولوژیکی بین مناطق پیچیده در پایگاههای داده با بهروزرسانیهای مکرر، مجموعه مقالات هجدهمین کنفرانس بینالمللی ACM SIGSPATIAL در مورد پیشرفتها در سیستمهای اطلاعات جغرافیایی (ACM SIGSPATIAL GIS)، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 2-5 نوامبر 2010. صص 380-389.
- رودریگز، MA; بریسابوآ، ن. مزا، ج. Luaces، MR Measuring Consistance with Respect to Topological Dependency Constraints، مجموعه مقالات هجدهمین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی (ACM SIGSPATIAL GIS)، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 2 تا 5 نوامبر 2010. ص 182-191.
- فرکسا، سی. همسایگی مفهومی و نقش آن در استدلال زمانی و مکانی. در سیستم های پشتیبانی تصمیم و استدلال کیفی ; Singh, M., Travé-Massuyès, L., Eds. هلند شمالی: آمستردام، هلند، 1991; ص 181-187. [ Google Scholar ]
- Egenhofer، MJ; آل طاها، KK Reasoning در مورد تغییرات تدریجی روابط توپولوژیکی، مجموعه مقالات کنفرانس بین المللی GIS-از فضا تا قلمرو: نظریه ها و روش های استدلال مکانی-زمانی بر روی نظریه ها و روش های استدلال مکانی-زمانی در فضای جغرافیایی ایتالیا، 21–23 سپتامبر 1992; صص 196-219.
- بهات، ام. لی، جی اچ. شولتز، سی. CLP(QS): یک چارچوب استدلال فضایی اعلامی. مجموعه مقالات کنفرانس تئوری اطلاعات فضایی (COSIT)، بلفاست، ME، ایالات متحده آمریکا، 12-16 سپتامبر 2011; ص 210-230.
- شولتز، سی. Bhatt, M. Towards a Declarative Spatial Reasoning System, Proceedings of ECAI 2012, Montpellier, France, 27-31 August 2012; ص 925-926.
- والگرون، JO; فرومبرگر، ال. ولتر، دی. دیلا، اف. Freksa، C. بازنمایی و استدلال فضایی کیفی در Sparq-Toolbox. در شناخت فضایی V: استدلال، کنش، تعامل . Barkowsky, T., Knauff, M., Ligozat, G., Montello, D., Eds. Springer-Verlag: برلین/هایدلبرگ، آلمان، 2007; جلد 4387، صص 39–58. [ Google Scholar ]
- وستفال، ام. وولفل، اس. Gantner, Z. GQR: A Fast Solver for Binary Qualitative Constraint Networks, مجموعه مقالات سمپوزیوم بهار AAAI درباره محک گذاری سیستم های استدلال مکانی و زمانی کیفی، استنفورد، کالیفرنیا، ایالات متحده آمریکا، 23 تا 25 مارس 2009.
- کوندوتا، ج.-ف. سعدی، م. Ligozat, G. A Generic Toolkit for n-ary Qualitative Temporal and Spatial Calculi, مجموعه مقالات سیزدهمین سمپوزیوم بین المللی در بازنمایی و استدلال زمانی، 2006 (TIME 2006)، بوداپست، مجارستان، 15-17 ژوئن 2006. صص 78-86.
- بهات، ام. Loke, S. مدلسازی سیستمهای فضایی پویا در حساب موقعیت. تف کردن شناخت. محاسبه کنید. 2008 ، 8 ، 86-130. [ Google Scholar ]
- شاناهان، ام. صص 1055-1060.
- Gabbay، DM; هانتر، الف. قابل احترام ساختن ناسازگاری: چارچوبی منطقی برای ناسازگاری در استدلال. لکت. نه. محاسبه کنید. علمی 1991 ، 535 ، 19-32. [ Google Scholar ]
- مک ورث، الف. ثبات در شبکه های روابط. آرتیف. هوشمند 1977 ، 8 ، 99-118. [ Google Scholar ]
- فاگین، ر. واردی، من تئوری وابستگی داده ها – یک مرور کلی. لکت. توجه داشته باشید. محاسبه کنید. علمی 1984 ، 172 ، 1-22. [ Google Scholar ]
- Cockcroft، S. طبقه بندی محدودیت های یکپارچگی داده های مکانی. GeoInformatica 1997 ، 1 ، 327-343. [ Google Scholar ]
- گرگوار، É. Konieczny، S. رویکردهای مبتنی بر منطق برای ادغام اطلاعات. Inf. ذوب. 2006 ، 7 ، 4-18. [ Google Scholar ]
- Alchourron، CE; گاردنفورس، پی. مکینسون، دی. درباره منطق تغییر نظریه: توابع انقباض و تجدید نظر جزئی. J. نماد. ورود به سیستم 1985 ، 50 ، 510-530. [ Google Scholar ]
- کوندوتا، ج.-ف. کاسی، اس. Schwind, N. چارچوبی برای ادغام شبکه های محدودیت های کیفی، مجموعه مقالات بیست و یکمین کنفرانس بین المللی انجمن تحقیقات هوش مصنوعی فلوریدا، نارگیل گرو، فلوریدا، ایالات متحده آمریکا، 15-17 مه 2008. صص 586-591.
- دیلا، اف. والگرون، JO استدلال فضایی کیفی با همسایگی های مفهومی برای کنترل عامل. جی. اینتل. ربات. سیستم 2007 ، 48 ، 55-78. [ Google Scholar ]
- گالتون، الف. تغییر فضایی کیفی، سیستم های اطلاعات فضایی ; انتشارات دانشگاه آکسفورد: آکسفورد، انگلستان، 2000. [ Google Scholar ]
- McCarthy, J. Circumscription – شکلی از استدلال غیر یکنواخت. آرتیف. هوشمند 1980 ، 13 ، 27-39. [ Google Scholar ]
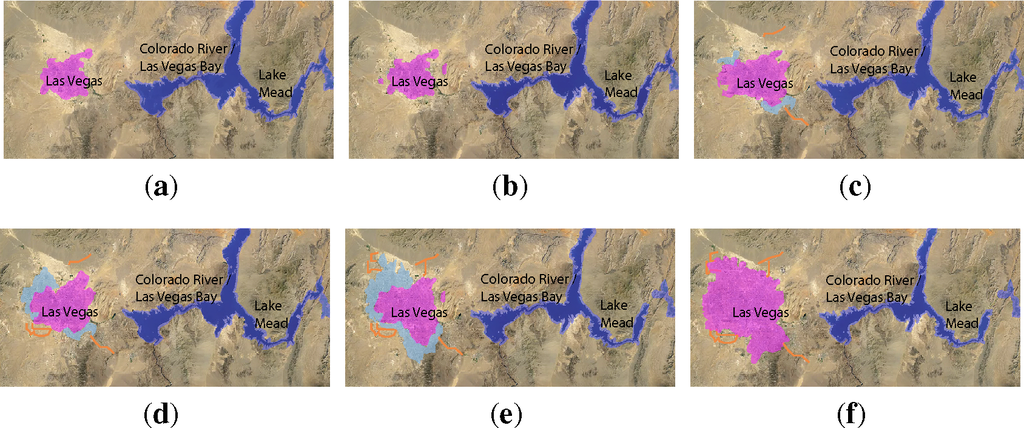
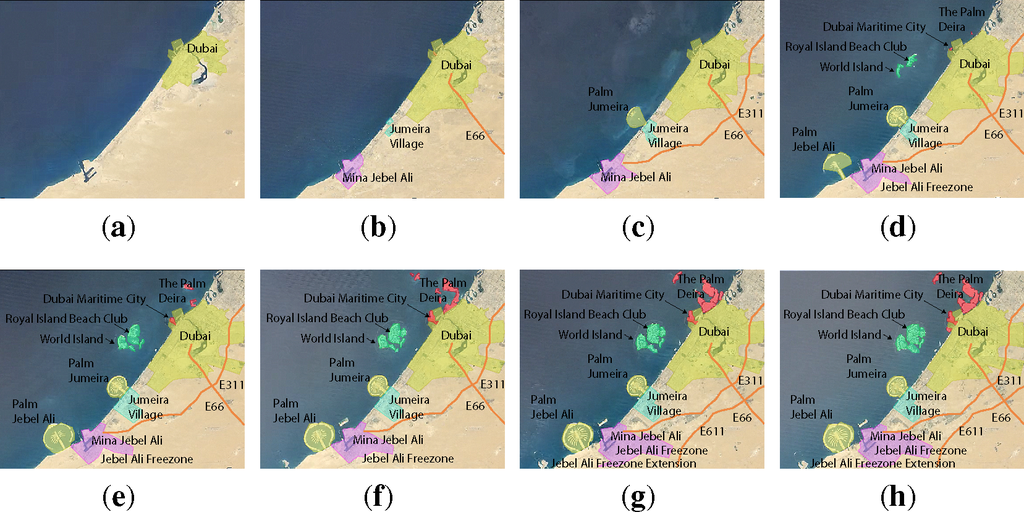



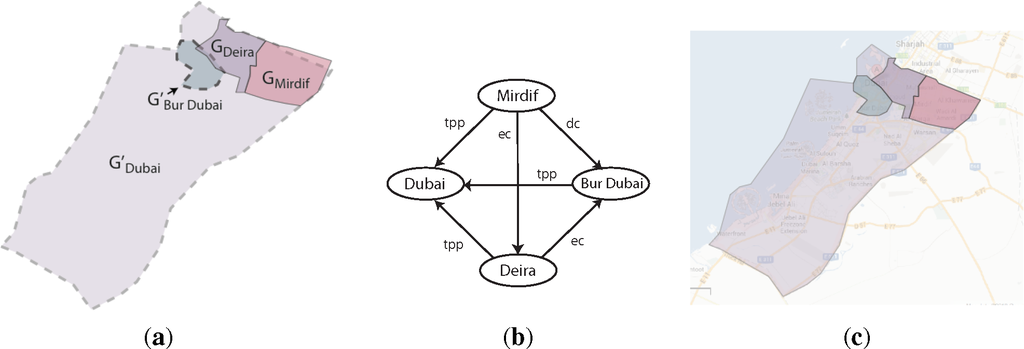
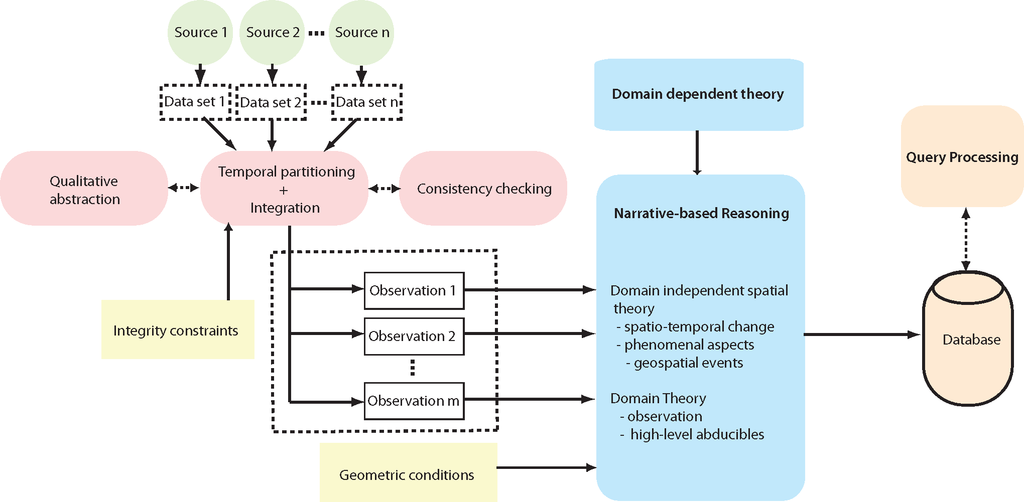
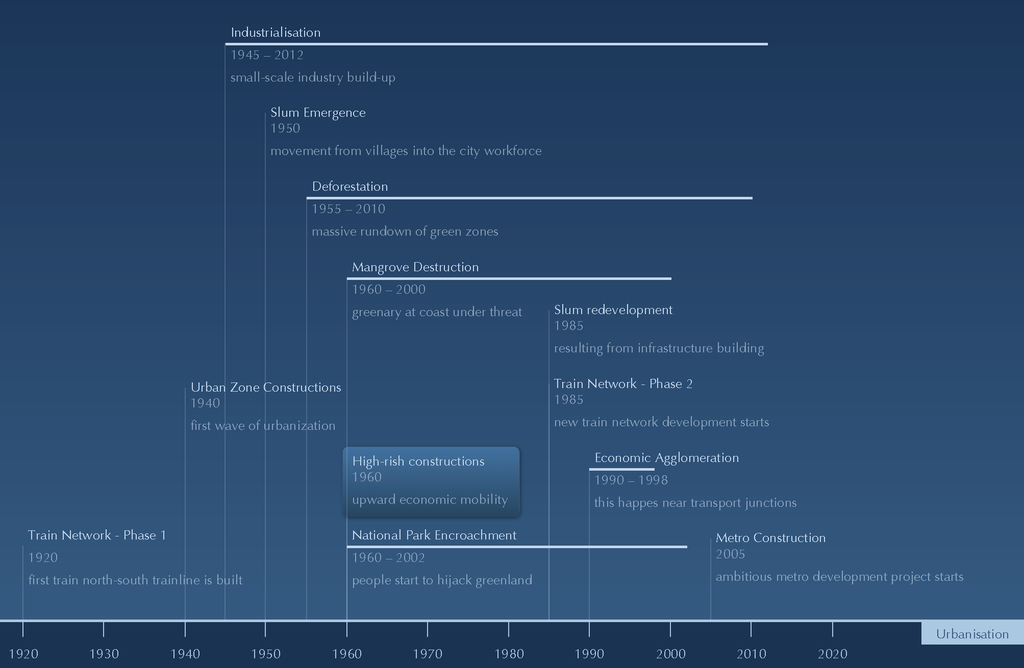
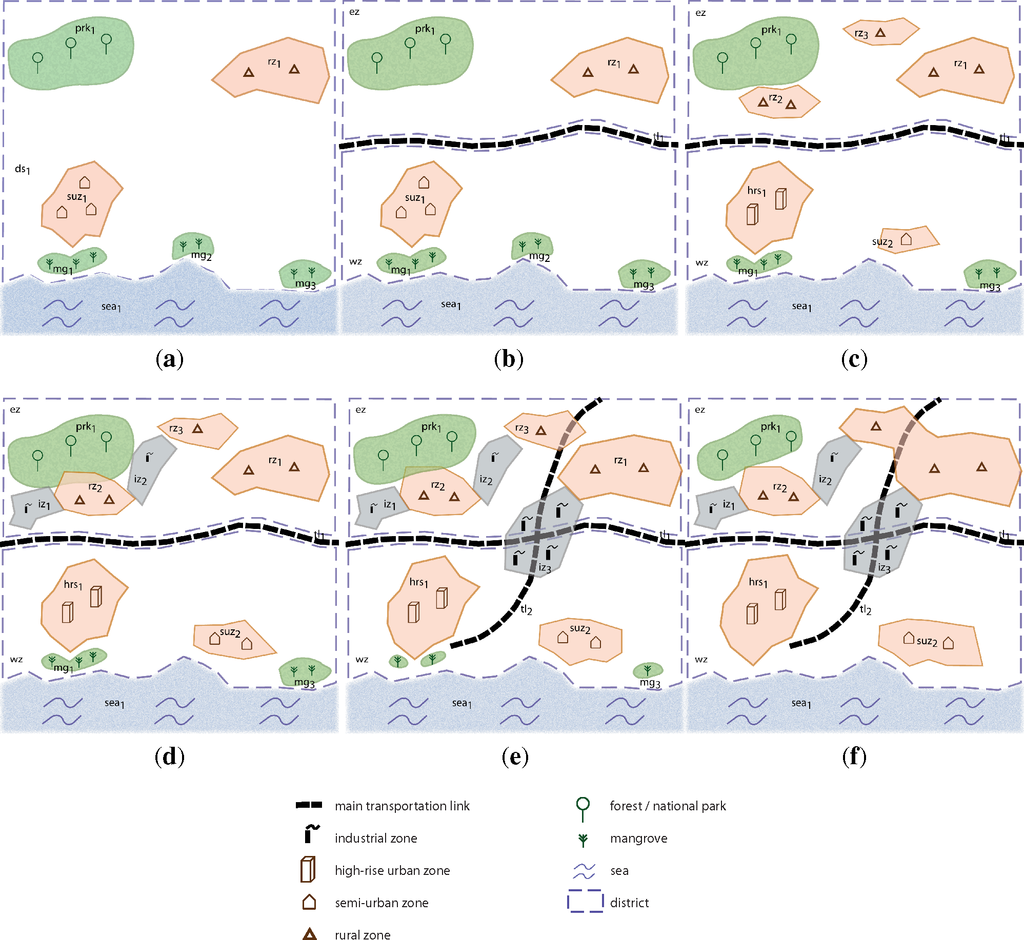
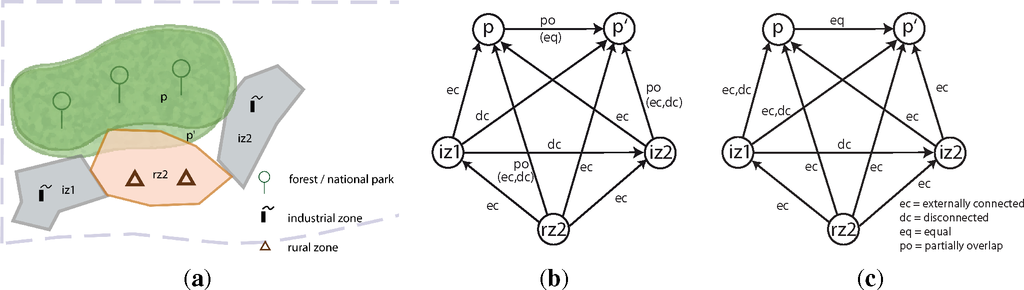
© 2014 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/3.0/) توزیع شده است.
بدون نظر