

خلاصه
مردم اغلب اشیاء را در محیط های داخلی حمل می کنند که به فضای کافی برای حرکت نیاز دارند. در چنین مواردی، دسترسی به فضاهای داخلی به ابعادی بستگی دارد که شامل شخص و اشیاء تحت عمل او می شود. این مقاله یک رویکرد جدید برای اجتناب از موانع و محاسبه مسیرهای داخلی با توجه به بعد کاربر پیشنهاد میکند. این رویکرد فضاهای غیرقابل دسترس برای کاربر را در پنج مرحله حذف میکند: (1) محاسبه حداقل فاصله بین موانع و یافتن شکافهای غیرقابل دسترس. (2) موانع را با توجه به شکاف های غیر قابل دسترس گروه بندی کنید. (3) شناسایی گروه هایی از موانع که بر مسیر بین دو مکان تأثیر می گذارند. (4) محاسبه مرزها برای گروه های انتخاب شده. و (5) یک شبکه در منطقه قابل دسترسی اطراف موانع موجود در اتاق بسازید. در مقایسه با روش جمع مینکوفسکی برای ترسیم فضاهای غیرقابل دسترس، رویکرد پیشنهادی چند ضلعی های ساده تری را برای گروه هایی از موانع تولید می کند که حاوی حلقه های داخلی نیستند. ایجاد یک شبکه ناوبری بر اساس این چند ضلعی های ساده آسان تر می شود. با استفاده از این رویکرد، میتوانیم شبکههای ویژه کاربر و وظیفه را از قبل ایجاد کنیم. از طرف دیگر، مسیر قابل دسترسی را می توان در همان لحظه قبل از ورود کاربر به اتاق ایجاد کرد.
کلید واژه ها:
ناوبری داخلی عابر پیاده ; بعد کاربر ; محاسبه مسیر ; دسترسی
1. معرفی
امروزه توجه بیشتری به ناوبری می شود که از عملیات مسیریابی یا تخلیه در داخل ساختمان پشتیبانی می کند. فضاهای داخلی همیشه حاوی انواع زیادی از اشیاء ثابت مانند میز، صندلی، میز و سایر مبلمان هستند. اغلب نیازی به در نظر گرفتن اندازه عابر پیاده برای اجتناب از موانع نیست. با این حال، در موارد خاص، بعد مربوط به عابر پیاده مهم است. به عنوان مثال، کاربر در حال دستکاری یک ماشین است و باید آن را با خود حرکت دهد.
ابعاد مربوط به عابر پیاده به طور خاص برای مدیریت و نگهداری تاسیسات مهم است. به عنوان مثال، یکی از کارکنان تعمیر و نگهداری در یک کارخانه یک وسیله نقلیه بزرگ را اداره می کند، و او به مسیری نیاز دارد که اطمینان حاصل کند که او می تواند با وسیله نقلیه عبور کند. شرایط مشابهی را می توان در فرودگاه ها مشاهده کرد. یکی از کارکنان با گاری چرخدار کالاهای مختلف را حمل می کند. کالا باید با اجتناب از موانع و عبور از برخی فضاهای باریک به بنادر متمایز تحویل داده شود. همه این موارد نیازمند مسیرهایی هستند که می توانند اندازه کل عابران پیاده و اشیاء آنها را در نظر بگیرند.
تحقیقات در مورد ناوبری داخلی عابر پیاده، موانع داخلی در شبکه ناوبری [ 1 ، 2 ، 3 ] و مسیریابی مانع اجتناب [ 4 ، 5 ، 6 ، 7 ] را در نظر گرفته است. با این حال، در مورد تأثیر اندازه کاربر بحث نکرده است. در مقابل، برنامه ریزی حرکت ربات همیشه ابعاد ربات را در نظر گرفته است. روش مجموع مینکوفسکی [ 8 ، 9 ] معمولاً برای شناسایی مناطق غیرقابل دسترس برای یک ربات استفاده شده است. شکل 1مثالی را ارائه می دهد که در آن یک ربات با یک دایره تقریب شده است. مجموع مینکوفسکی یک مانع، مانع را با توجه به اندازه ربات گسترش می دهد (شعاع دایره در شکل 1 a)، در حالی که به طور همزمان، ربات به یک نقطه “مرجع” کوچک می شود ( شکل 1 a را ببینید). مجموع Minkowski ناحیه غیرقابل دسترس ربات را نشان می دهد. اگر مجموع موانع مختلف مینکوفسکی با هم تلاقی کنند، آنگاه آنها در یکی ادغام می شوند تا یک ناحیه غیرقابل دسترس برای ربات را تشکیل دهند ( شکل 1 ب را ببینید). فضای خارج از منطقه اتحاد به عنوان فضای آزاد برای ربات در نظر گرفته می شود و در نتیجه ربات می تواند مسیرهایی را در آن طی کند.
با این حال، رویکرد مجموع مینکوفسکی تمایل به تولید هندسه غیر ساده دارد، زیرا شامل بسیاری از عملیات اتحاد بر روی چند ضلعی ها می شود. چنین هندسه ای برای ایجاد یک شبکه ناوبری مناسب نیست. شکل 2 همچنین از یک دایره برای تقریب یک عابر پیاده با اشیاء/ابزارهای مرتبط استفاده می کند. شکل 2 دو نتیجه اتحادیه از مجموع مینکوفسکی را نشان می دهد. یک حلقه داخلی جدا شده (نگاه کنید به شکل 2 a) بخشی از مجموع ادغام شده مینکوفسکی از شش جسم است. شکل 2 ب حالت خود تقاطع را نشان می دهد. چندین یال در چند ضلعی مجموع ادغام شده مینکوفسکی با یکدیگر تماس دارند، که افزونگی راس ها را افزایش می دهد. علاوه بر این، چند ضلعی های تولید شده ( شکل 2 را ببینید) شامل رئوس بیش از حد است (مثلاً قسمت های “منحنی”)، که ایجاد شبکه را پیچیده می کند (به زیر مراجعه کنید).
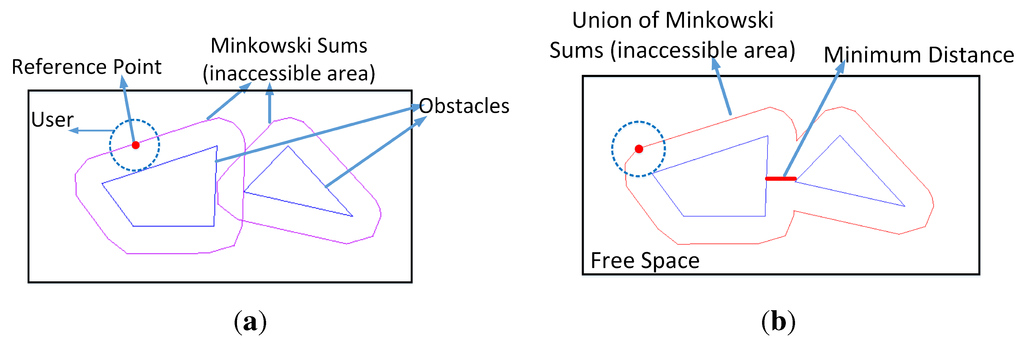
شکل 1. Minkowski مجموع موانع برای یک کاربر و حداقل فاصله بین موانع. ( الف ) مجموع موانع مینکوفسکی برای یک کاربر که به صورت دایره تقریبی شده است. ( ب ) اتحاد مجموع موانع مینکوفسکی و حداقل فاصله.
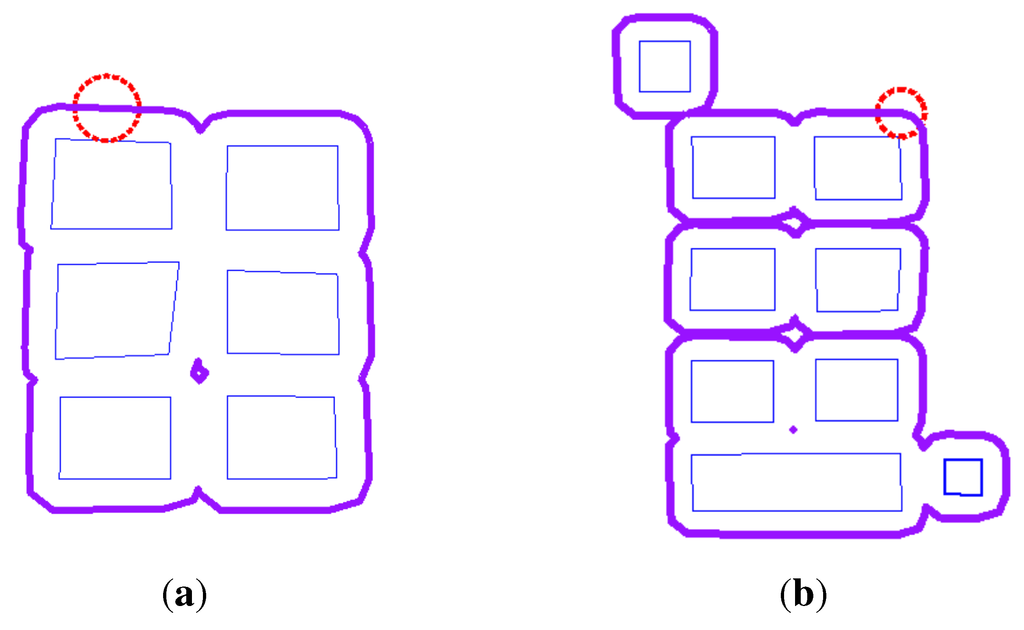
شکل 2. اتحاد مجموع Minkowski شامل حلقه های داخلی و خود تقاطع است. ( الف ) اتحاد مینکوفسکی با یک حلقه داخلی جمع می شود (دایره نشان دهنده یک کاربر است). ( ب ) خود تقاطع و حلقه های داخلی مجموع مینکوفسکی.
رویکرد ما با اندازهگیری مستقیم حداقل فاصله (MD) بین موانع و تعیین مرزهای مناطق اشغالشده با مانع با رئوس کمتر، به این دو موضوع میپردازد. ما می توانیم شکاف های غیرقابل دسترس بین موانع را با MD پیدا کنیم. هنگامی که MD شکاف کوتاهتر از عرض کاربر ( به عنوان مثال ، قطر دایره) باشد، شکاف غیرقابل دسترسی است. موانع داخلی که شکاف های غیرقابل دسترس را به اشتراک می گذارند به عنوان یک گروه در نظر گرفته می شوند. ما یک چند ضلعی ساده را برای محدود کردن موانع متعدد زمانی که داخل آنها برای کاربر قابل دسترسی نیست محاسبه می کنیم. با “ساده”، ما به ویژگی های ساده در استاندارد [ 10 ] کنسرسیوم فضایی باز اشاره می کنیم. محاسبه و ذخیره ویژگی های ساده (مثلاً چند ضلعی های بدون حلقه های داخلی) آسان است. با همان اشیاء در شکل 2، ما چند ضلعی های ساده را به عنوان مرزهای دو گروه از موانع محاسبه می کنیم ( شکل 3 را ببینید ). در مقایسه با شکل 2 a، چند ضلعی ( یعنی مرز) در شکل 3 a هیچ حلقه داخلی ندارد. چند ضلعی در شکل 3 b نسبت به شکل 2 b رئوس کمتری دارد .
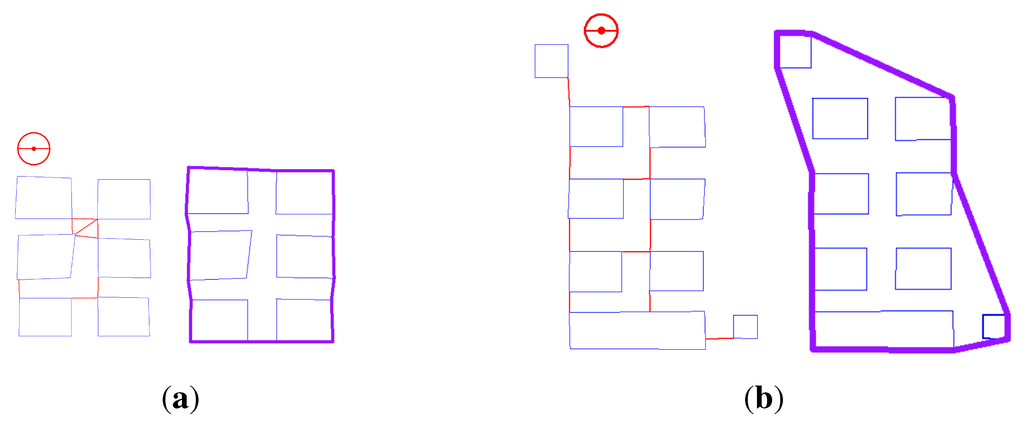
شکل 3. ایجاد مرزهای چند ضلعی از اشیاء با توجه به شکاف های غیر قابل دسترس بین اشیاء (دایره نشان دهنده یک کاربر با ابزار است و خطوط قرمز نشان دهنده شکاف های غیرقابل دسترس است). ( الف ) مرز چند ضلعی برای شش جسم بدون حلقه داخلی. ( ب ) مرز ساده برای نه شیء.
شبکه ناوبری اکنون می تواند به آسانی بر روی گروه های حاصل از موانع ساخته شود. با توجه به دو مکان، ممکن است اتفاق بیفتد که همه گروههای موانع برای ایجاد شبکه ناوبری مورد نیاز نباشند. ما میتوانیم شبکهای را بدون گروههایی از موانع ایجاد کنیم، زمانی که آنها بر مسیر تأثیر نگذارند. این منجر به کاهش دیگری در رئوس خواهد شد. شکل 4 a چنین موردی را نشان می دهد. موانع سمت چپ اتاق بر مسیر بین دو دری که با یک خط مستقیم متصل شده اند تأثیر نمی گذارد. شبکه ناوبری برای کاربر تنها با دو گروه در سمت راست اتاق ساخته شده است ( شکل 4 را ببینیدب). شایان ذکر است که ما فقط موانع را در نظر گرفته ایم، اما دیوارها را نه. برای در نظر گرفتن شکافهای بین دیوارها و موانع، یک بافر را معرفی میکنیم ( شکل 4 ب را ببینید ) با فاصله یکسان از تمام دیوارها با اندازه کاربر. شبکه نهایی جهت یابی با در نظر گرفتن شکاف های غیرقابل دسترس واقع در بافر محاسبه می شود. در بافر، شکاف های غیرقابل دسترس بین دیوارها و موانع به صورت خطوط قرمز در شکل 4 ب ارائه شده است. لبه های شبکه که این شکاف های غیرقابل دسترس را قطع می کنند حذف می شوند. متعاقباً، کوتاه ترین مسیر در شبکه محاسبه می شود ( شکل 4 ج را ببینید). مسیر محاسبه شده روی گره های مرزها ( شکل 4 را ببینیدج) یک مسیر شماتیک است و نشان می دهد که کاربر از کجا می تواند عبور کند. یک مسیر واقعی با در نظر گرفتن اندازه کاربر در شکل 4 د. برای سادگی، بقیه این مقاله فقط مسیرها را به عنوان مسیر شماتیک در شبکه های ایجاد شده تجسم می کند.

شکل 4. محاسبه یک مسیر با مرزهای ساده گروه های موانع برای یک کاربر. ( الف ) انتخاب گروههایی از موانع بین دو مکان (دایره نشاندهنده کاربر است؛ مرزهای موانع زرد است؛ و خط آبی مسیر مستقیم است). ( ب ) شبکه ناوبری با در نظر گرفتن شکاف های غیرقابل دسترس بین موانع و دیوارها (خطوط آبی نشان دهنده بافر دیوارها، خطوط قرمز نشان دهنده شکاف های غیرقابل دسترس و خطوط سیاه شبکه را تشکیل می دهند). ( ج ) یک نمایش شماتیک از کوتاهترین مسیر محاسبه شده در شبکه (مسیر سیاه است). ( د ) یک مسیر واقعی با در نظر گرفتن اندازه کاربر (دایره ها کاربر را نشان می دهند؛ و خطوط سیاه مسیر هستند).
این مقاله رویکردی برای محاسبه مسیرها برای کاربران با ابعاد مختلف پیشنهاد میکند. داده های اتخاذ شده شامل پلان های دو بعدی (2 بعدی) شامل موانع و ابعاد کاربر است. در صفحه دوبعدی، ابعاد کاربر، قطر دایرهای است که کاربر را میپوشاند و اشیا/ابزارهایی که او حمل میکند. رویکرد پیشنهادی شامل پنج مرحله است (بخش های برجسته شده در شکل 5 را ببینید). ابتدا MD ها را بین موانع داخلی هر اتاق محاسبه می کنیم. شکاف های غیرقابل دسترس زمانی به دست می آیند که MD بین موانع کوتاه تر از ابعاد کاربر باشد. دوم، موانع بر اساس شکاف های غیر قابل دسترس گروه بندی می شوند. سوم، بین دو مکان، گروه های لازم از موانع را برای ساخت یک شبکه ناوبری انتخاب می کنیم. چهارم، ما مرزها را با هندسه ساده برای گروه های انتخاب شده محاسبه می کنیم. متعاقباً با در نظر گرفتن شکاف های غیرقابل دسترس بین مرزها و دیوارها، یک شبکه ناوبری با مرزهای گروه ها ایجاد می کنیم. در نهایت، یک مسیر می تواند محاسبه شود تا کاربر را با بعد داده شده در خود جای دهد.

شکل 5. مروری بر رویکرد پیشنهادی.
بقیه مقاله به شرح زیر سازماندهی شده است. بخش 2 کارهای مرتبط را معرفی می کند. بخش 3 روش پیشنهادی را گام به گام همانطور که در بالا توضیح داده شد معرفی می کند. بخش 4 دو مورد استفاده از رویکرد ما را معرفی می کند. در نهایت، بخش 5 این مقاله را با پیشنهادهایی برای کار آینده به پایان میرساند.
2. کارهای مرتبط
مطالعات کمی در مورد ابعاد عابران پیاده برای مسیریابی داخل ساختمان وجود دارد. یوان و اشنایدر [ 11 ] فضای داخلی را با انواع مختلف مکعب ها مدل می کنند و مکعب ها را ادغام می کنند تا دسترسی کاربران را منعکس کنند. با این حال، این مطالعه یک راه حل دقیق یا عملی برای مسیرهای محاسباتی برای کاربران با ابعاد مختلف ارائه نکرد. به طور کلی، مدلهای ناوبری برای عابران پیاده به مناطق داخلی در دسترس کاربران اشاره نمیکند [ 3 ، 4 ، 5 ، 7 ، 12 ، 13 ، 14 ، 15 ، 16.]، اما در عوض آنها را به طور ضمنی در نظر بگیرید. آنها به طور ضمنی یک کاربر را به عنوان یک نقطه در نظر می گیرند یا کاربر را با اندازه بسیار کوچک تقریبی می کنند.
بیشتر، اندازه کاربران برای بررسی دسترسی به محیط های داخلی برای کاربران ویلچر در نظر گرفته شده است [ 17 ، 18 ، 19 ، 20 ]. هان و همکاران [ 17 ] از روش جمع Minkowski برای ترسیم مناطق قابل دسترسی برای کاربران ویلچر استفاده میکند. عثمانی و همکاران [ 19 ] و Pruski [ 20 ] مناطق قابل دسترس برای کاربران ویلچر را با توجه به جهت گیری کاربر مشخص می کنند. این رویکرد نیز بر اساس مجموع مینکوفسکی است. Kostic و Scheider [ 18 ] رویکردی را برای محاسبه نواحی قابل دسترس بر روی یک مدل شبکه پیشنهاد می کنند ( به عنوان مثالسلول های منظم). با توجه به شکل کاربر و ویلچر، نواحی محاسبهشده میتوانند حرکاتی را که با محور x و y و بدنه چرخش 90 درجه هماهنگ هستند، پشتیبانی کنند. تمام چیزی که تحقیق به دنبال یافتن آن است ابتدا مناطق محدود چند ضلعی/شبکه ای قابل دسترسی برای کاربران ویلچر و سپس محاسبه مسیرهای داخل مناطق است.
این بخش به طور خلاصه کار مربوط به اجزای مختلف رویکرد ما را معرفی می کند ( شکل 5 را ببینید ). برای جزء اول، چندین الگوریتم برای محاسبه MD بین اشکال دوبعدی ابداع شده است. چین و وانگ [ 21 ] الگوریتمی را با هدف به حداقل رساندن فاصله رئوس بین چندضلعی های محدب پیشنهاد می کنند. Toussaint و Bhattacharya [ 22 ] راه حلی را برای یافتن MD بین دو مجموعه از نقاط 2 بعدی، با استفاده از الگوریتم کالیپرهای چرخشی [ 23 ] برای محاسبه MD بین دو چند ضلعی محدب ارائه می دهند. یانگ و همکاران [ 24] همچنین روشی را برای محاسبه MD بین دو چند ضلعی محدب ارائه می دهد، اما بر اساس یک ساختار داده خاص. ما الگوریتم کالیپرهای چرخشی [ 23 ] را اتخاذ میکنیم، زیرا مستقیماً MD را بین دو مانع چند ضلعی محدب فراهم میکند و میتوان آن را به راحتی پیادهسازی کرد.
گام دوم در رویکرد ما، گروه بندی موانع است. الگوریتم های گروه بندی چند ضلعی ها به طور گسترده برای تعمیم نقشه خودکار مورد مطالعه قرار گرفته اند. به عنوان مثال، لی و همکاران. [ 25 ] ساختمان ها را با توجه به بسیاری از محدودیت ها، مانند مجاورت، شباهت، منطقه مشترک، جهت گیری مشترک و غیره در گروه ها قرار می دهد . این نوع گروه بندی بر یک معیار واحد مانند فاصله بین دو چند ضلعی متکی نیست. در مقابل، تنها معیار در روش گروه بندی ما MD بین موانع است.
مرحله سوم در رویکرد ما انتخاب موانع گروه بندی شده است. هدف از انتخاب این است که تعداد موانع را کاهش دهد و فقط موانعی را که بر محاسبه مسیر تأثیر می گذارند نگه دارند. برای این منظور می توان از بدنه محدب (CH) استفاده کرد. یک CH نشان دهنده مرز محدب یک مجموعه نقطه است. این یک چند ضلعی محدب است که تمام نقاط را با حداقل مساحت محدود می کند [ 8 ]. سوبودزینسکی و راوبال [ 3] یک محاسبه مسیر را در یک اتاق برای انتخاب اشیاء توسط CH و اجتناب از آنها معرفی می کند. این روش تقاطع اشیاء را با یک CH مرتبط بررسی می کند و سپس اشیاء تأثیرگذار مسیرها را برای کاربر تعیین می کند. در نهایت، مسیرها همیشه در آخرین CH بدون هیچ گونه تقاطع اجسام هستند. CH نهایی در واقع اشیاء مرتبط را برای مسیرهای جلوگیری از موانع انتخاب می کند. با این حال، روش در [ 3 ] ابعاد کاربر را در نظر نمی گیرد. محاسبه مسیر ممکن است در برخی شرایط منجر به مسیرهای غیرقابل دسترس شود. در عوض، CH را برای انتخاب گروههای مانع اتخاذ میکنیم.
گام بعدی در رویکرد ما، محاسبه مرز برای گروههای موانع انتخاب شده است. روش اشکال آلفا را می توان برای محاسبه مرزهای غیر محدب یک مجموعه نقطه به کار برد. در صفحه دوبعدی، اشکال آلفای یک مجموعه نقطه، چند ضلعی های متفاوتی هستند که توسط مجموعه نقطه تشکیل شده اند [ 26 ]. هر شکل آلفا ( به عنوان مثال ، یک چند ضلعی) توسط یک مقدار ( یعنی مقدار آلفا) تعیین می شود. هنگامی که مقدار آلفا به بی نهایت نزدیک می شود، شکل آلفا CH است و زمانی که مقدار آلفا برابر با صفر شود، به مجموعه نقاط تبدیل می شود [ 27]]. سایر مقادیر آلفا در بین صفر و بی نهایت با تعداد چند ضلعی های غیر محدب مجموعه نقطه مطابقت دارد. ما از روش اشکال آلفا برای محاسبه مرزهای غیر محدب برای گروههای موانع استفاده میکنیم، که به ما کمک میکند تا مرزهای جدا شده برای گروههای مختلف موانع را پیدا کنیم.
راه متداول برای محاسبه اشکال آلفا با استفاده از مثلث سازی Delaunay (DT) است [ 27 ]. برای مجموعه ای از نقاط P ، DT تجزیه ای است متشکل از مجموعه ای از مثلث ها که در آن هیچ نقطه دیگری در داخل دایره دایره هر مثلث وجود ندارد [ 8 ]. بر اساس DT، آزمون آلفا با استفاده از یک مقدار آلفا به شکل آلفا نتیجه میدهد: برای هر مثلث در DT، اگر طول هر یال در مثلث کمتر از مقدار آلفا باشد، باید مثلث حفظ شود. در غیر این صورت، مثلث حذف خواهد شد. مرز همه مثلث های حفظ شده شکل آلفا را تشکیل می دهد.
گام نهایی در رویکرد ما ایجاد شبکه ای است که شکاف های غیرقابل دسترس بین مرزها و دیوارهای محاسبه شده را در نظر می گیرد. ما نمودار دید (VG) را به عنوان شبکه ناوبری انتخاب می کنیم. این به این دلیل است که VG کوتاه ترین مسیرها را برای گره های مختلف در اختیار کاربر قرار می دهد. گره های VG نشان دهنده مکان ها و رئوس موانع مختلف در یک اتاق هستند، در حالی که لبه های دید نشان دهنده مسیرهای مستقیم بین این گره ها هستند [ 8 ]. تعدادی الگوریتم در مورد ساخت VG و کوتاهترین مسیریابی آن گزارش شده است [ 28 ، 29 ، 30 ، 31 ، 32 ، 33 ، 34 ، 35 ]. روش ما از الگوریتم VG [28 ، 34 ] که بهترین گزینه برای ایجاد VG کامل است.
در مرحله آخر باید دسترسی به لبه های VG را تایید کنیم. شکاف های غیرقابل دسترس بین مرزهای محاسبه شده و دیوارها در داخل بافر دیوارها قرار دارند ( شکل 4 ب را ببینید). بافر یک چند ضلعی است که از مجموعه ای از نقاط در فاصله اختصاص داده شده از تمام گره های یک ویژگی مشخص تشکیل شده است [ 36 ]. در این مقاله، بافری از دیوارها را با روش مجموع مینکوفسکی محاسبه میکنیم. بافر جمع Minkowski چند ضلعی اتاق با دایره ای است که قطر آن برابر با بعد کاربر است.
کوتاه ترین مسیر را می توان در VG ایجاد شده محاسبه کرد. همانطور که مکان شروع و هدف مشخص است، الگوریتم معروف Dijkstra [ 37 ]، یک الگوریتم کوتاه ترین مسیر تک منبع، برای محاسبه مسیر به کار گرفته شده است.
این مقاله الگوریتم های فوق الذکر را به ترتیب ارائه شده برای محاسبه مسیرها برای کاربران با ابعاد مختلف ادغام می کند. این ادغام هرگز در محاسبات مسیر داخلی با توجه به ابعاد کاربر در نظر گرفته نشده است.
3. رویکرد پیشنهادی
همانطور که قبلا ذکر شد، رویکرد ما شامل پنج مرحله است. در این بخش هر مرحله به تفصیل توضیح داده خواهد شد.
3.1. محاسبه MD بین موانع و یافتن شکاف های غیر قابل دسترس
ما اصطلاح “گلوگاه” را برای نشان دادن فضای ( به عنوان مثال ، شکاف غیرقابل دسترس) بین دو مانع معرفی می کنیم که کاربر با ابعاد داده شده نمی تواند از آن عبور کند. همانطور که قبلا ذکر شد، رویکرد ما از MD بین موانع استفاده می کند که هدف آن شناسایی تنگناها است. موانع با گلوگاه را باید در یک گروه طبقه بندی کرد. مسیری در اطراف گروه در اختیار کاربر قرار می گیرد.
همانطور که در بخش 2 ذکر شد ، این مقاله از الگوریتم کالیپرهای چرخشی برای محاسبه MD بین موانع استفاده کرد. بنابراین، ما مجبور شدیم موانع غیر محدب را با CHهای آنها جایگزین کنیم، یعنی چندضلعی های محدب که موانع را نشان می دهند.
برای هر مانع، MD های آن را با CH سایر موانع محاسبه کردیم. اگر یک MD کوچکتر از یک بعد معین باشد، آن را به عنوان یک گلوگاه ثبت می کنیم. به این ترتیب، تمام تنگناهای بین موانع جمع آوری می شوند ( شکل 6 را ببینید ).

شکل 6. گلوگاه های محاسباتی که کاربر با ابعاد معین نمی تواند از آنها عبور کند.
شکل 6 تنگناهای بین موانع را برای کاربر با یک بعد مشخص نشان می دهد. گلوگاه ها با خطوطی که CHs موانع را به هم وصل می کنند نشان داده می شوند ( شکل 6 را ببینید ). اگر مانعی با سایر موانع گلوگاهی نداشته باشد، مانع یک گروه فردی است (مثلاً مانع 11). در غیر این صورت، موانعی که توسط این خطوط به یکدیگر متصل می شوند در یک گروه قرار می گیرند (مثلاً موانع 1-4).
3.2. موانع گروهی
در این بخش روش گروه بندی موانع با استفاده از MD بین آنها معرفی می شود. موانع دارای گلوگاه ( به عنوان مثال ، MD ها کوچکتر از ابعاد کاربر هستند) در یک گروه قرار می گیرند. ما یک لیست پیوندی برای هر مانع ایجاد می کنیم. هر گلوگاه بین دو مانع به عنوان اتصال آنها در نظر گرفته می شود. لیست پیوندی شامل تمام موانع مرتبط دیگر است. مراحل زیر روند را نشان می دهد ( شکل 7 را ببینید ).
-
مرحله 1. یک مانع بدون علامت را به عنوان مانع فعلی انتخاب کنید . اگر هیچ مانعی وجود ندارد، به مرحله 5 بروید. در غیر این صورت، یک گروه خالی ایجاد کنید . اضافه کردن obs به gop . و به مرحله 2 بروید.
-
مرحله 2. در لیست پیوندی obs ، همه اعضای بدون علامت را به gop اضافه کنید .
-
مرحله 3. برای اعضایی که قبلاً اضافه شدهاند، همه اعضای تیکنخورده در لیستهای پیوند شدهشان را به gop اضافه کنید .
-
مرحله 4. مرحله 3 را تکرار کنید تا زمانی که هیچ عضو بدون علامتی پیدا نشود. سپس موانع موجود در گوپ گروهی را تشکیل می دهند. به مرحله 1 بروید.
-
مرحله 5. همه گروه ها شناسایی شده اند. تعداد گروه ها را بشمارید و به هر گروه یک شناسه اختصاص دهید.
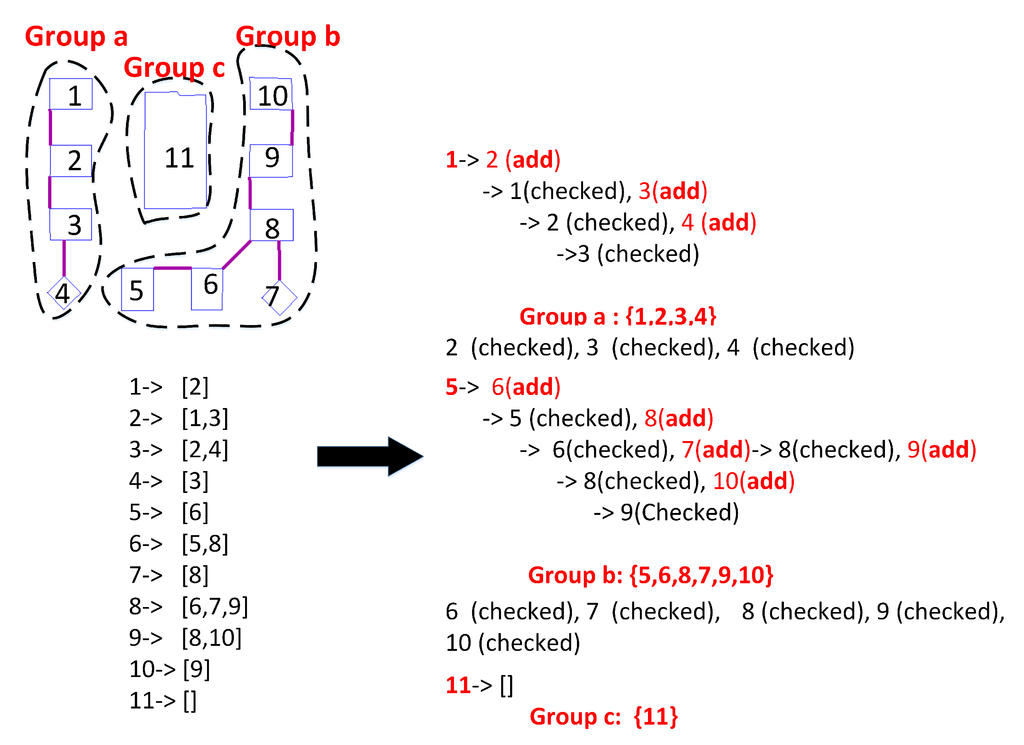
شکل 7. گروه بندی 11 مانع به سه گروه با توجه به تنگناها.
شکل 7 نمونه ای از گروه بندی موانع را نشان می دهد. گروههای موانع، موانع واقعی برای کاربر با ابعاد معین هستند. کاربر باید از گروه های موانعی که می توانند اشکال مختلف داشته باشند اجتناب کند. بر این اساس، مرز هر گروه مانع باید ایجاد شود که در بخش 3.4 به آن پرداخته خواهد شد .
3.3. گروه های موانع را انتخاب کنید
این مرحله برای کاهش تعداد گروه هایی که برای محاسبه مسیر استفاده می شوند، معرفی شده است. بین دو مکان، برخی از اشیاء داخلی ممکن است در مسیر کاربری با ابعاد مشخص تداخل نداشته باشند. از این رو، هدف ما شناسایی گروههایی از موانع است که بر یک مسیر تأثیر میگذارند.
در یک اتاق، ابتدا کوتاه ترین مسیر بین دو مکان را بدون توجه به موانع محاسبه می کنیم. نام مسیر مسیر مستقیم است. مسیر مستقیم و CH موانع برای انتخاب گروه های مانع استفاده می شود. فرآیند انتخاب شامل مراحل زیر است.
-
مرحله 1. موانعی را که مسیر مستقیم را قطع می کنند، پیدا کنید.
-
مرحله 2. همه موانع را از گروه هایی که دارای یک مانع هستند که مسیر مستقیم را قطع می کند، انتخاب کنید.
-
مرحله 3. یک CH را با گره های همه موانع انتخاب شده و مسیر مستقیم محاسبه کنید.
-
مرحله 4. اگر CH فعلی تلاقی یا حاوی موانع جدید است، گروه های موانع جدید را جستجو کنید و همه موانع را از گروه های جدید انتخاب کنید. یک CH را دوباره محاسبه کنید.
-
مرحله 5. مرحله 4 را تکرار کنید تا زمانی که هیچ مانع دیگری در CH فعلی وجود نداشته باشد.
هدف انتخاب مانع انتخاب گروه های مانع در یک منطقه محدود برای مسیریابی است. زمانی که CH نهایی (FCH) شامل هیچ مانع جدیدی نباشد، روند تکراری متوقف خواهد شد. برای کاربری با اندازه معین، یک مسیر را می توان در FCH پیدا کرد.
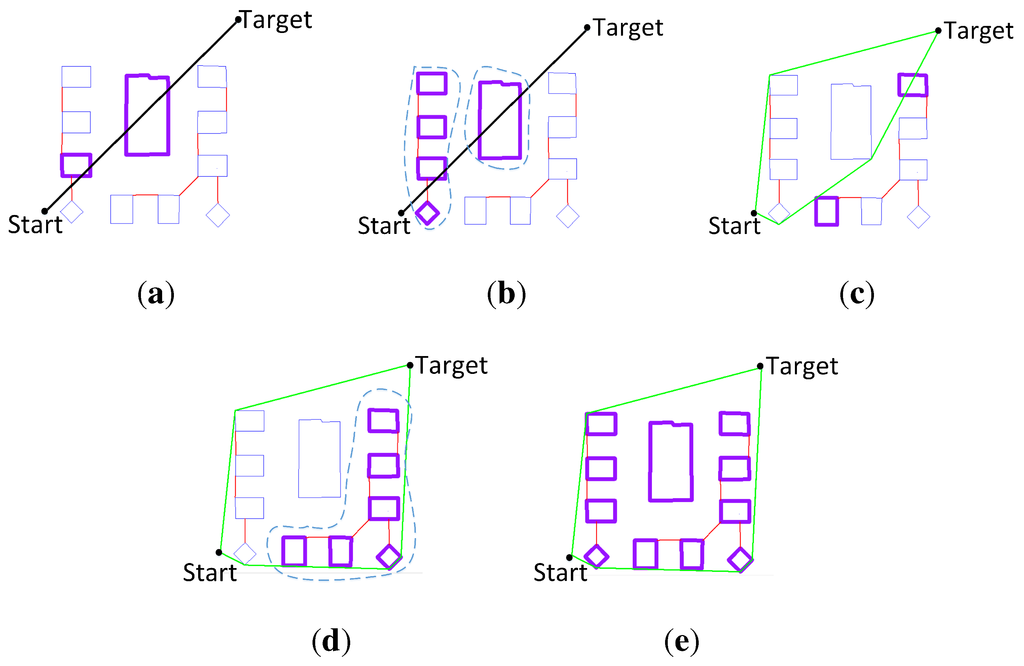
شکل 8. انتخاب گروه های موانع با توجه به محل شروع و هدف یک کاربر. ( الف ) مسیر مستقیم دو مانع را قطع می کند. ( ب ) انتخاب گروه های موانع متقاطع. ( ج ) محاسبه بدنه محدب (CH)، و CH موانع دیگر را قطع می کند. ( د ) انتخاب گروهی از موانع جدید و محاسبه مجدد CH. ( ه ) دیگر هیچ مانعی CH را قطع نمی کند و سپس سه گروه انتخاب می شوند.
شکل 8 فرآیند انتخاب را نشان می دهد. موانع بر اساس بعد معینی از کاربران گروه بندی شده اند. یک مسیر مستقیم بین دو مکان محاسبه می شود. ابتدا مسیر مستقیم دو مانع را قطع می کند (مرحله 1). این دو مانع به دو گروه مختلف تعلق دارند. دوم، همه موانع در دو گروه انتخاب می شوند (مرحله 2). سوم، یک CH با موانع انتخاب شده محاسبه می شود (مرحله 3). سپس، CH دو مانع جدید را قطع می کند. چهارم، گروه دو مانع جدید پیدا می شود. همه موانع در گروه انتخاب می شوند و سپس یک CH جدید محاسبه می شود (مرحله 4). در نهایت، CH جدید هیچ تقاطع دیگری ندارد (مرحله 5). بنابراین، CH FCH است و سه گروه از موانع انتخاب می شوند.
حالت شدید این است که تمام موانع موجود در یک اتاق در FCH انتخاب می شوند. این بدان معنی است که از همه موانع برای مسیریابی استفاده می شود. این مورد ممکن است در یک سناریوی متراکم مانع رخ دهد. ابعاد بزرگ انسان و تجهیزات نیز می تواند منجر به موارد شدید شود. با این حال، در سناریوهای رایج داخلی، تنها برخی از موانع موجود در یک اتاق انتخاب می شوند.
3.4. ایجاد مرز برای گروه های منتخب
این بخش تولید مرزهای غیر همپوشانی را برای گروه های مانع انتخاب شده ارائه می دهد. مرز یک گروه مانع، شکل آلفای رئوس همه موانع در گروه است. ما شکل آلفا را بر اساس DT رئوس (به بخش 2 مراجعه کنید ) و یک مقدار آلفا محاسبه کردیم. مقدار آلفا برابر با بعد داده شده یک کاربر است. در نتیجه، تنها یک شکل آلفا ( یعنی مرز) برای کاربر وجود دارد. این روش مرزهای غیر همپوشانی همه گروههای موانع را ایجاد میکند ( شکل 9 را ببینید ). روش تولید مرز در زیر ارائه شده است.
-
مرحله 1. برای یک گروه موانع انتخاب شده، تعداد موانع را بررسی کنید. اگر گروه فقط یک مانع را شامل شود، چند ضلعی مانع همان مرز است. در غیر این صورت، به مرحله 2 بروید.
-
مرحله 2. یک DT با رئوس همه موانع در گروه ایجاد کنید و بعد داده شده کاربر را به مقدار آلفا اختصاص دهید.
-
مرحله 3. تمام طول لبه های هر مثلث را در DT محاسبه کنید. یک مثلث را اگر طول لبه های آن کمتر از مقدار آلفا باشد حفظ کنید.
-
مرحله 4. در تمام مثلث های حفظ شده، لبه هایی را که فقط برای یک مثلث استفاده شده اند، پیدا کنید. لبه ها را به صورت یک مرز در آورید.
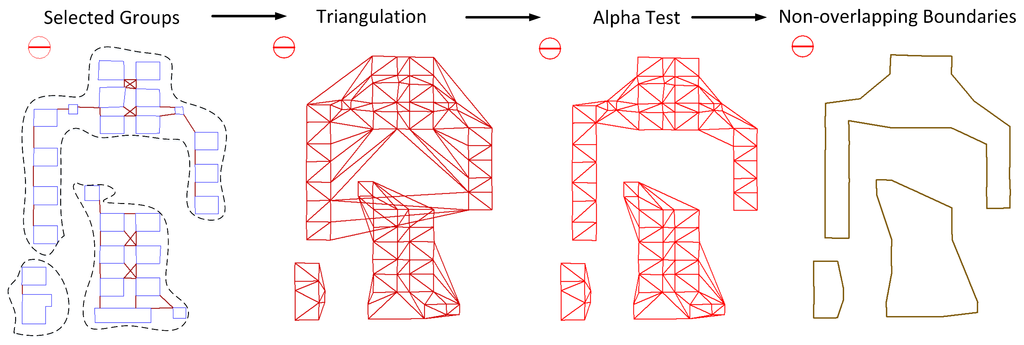
شکل 9. ایجاد مرزهای غیر همپوشانی گروه های مانع.
سه گروه از موانع در شکل 10 نشان داده شده است . مرزها در همان تعداد گروه موانع به دست می آیند. مقدار آلفا روی 0.8 متر (m) تنظیم شده است. در ابتدا، DTهای دو گروه با هم همپوشانی دارند. پس از اعمال آزمون آلفا به DT ها، مرزهای غیر همپوشانی برای گروه ها محاسبه می شود.

شکل 10. تولید مرز سه گروه مانع برای یک کاربر با اندازه 0.8 متر.
3.5. ایجاد یک شبکه با در نظر گرفتن شکاف های غیرقابل دسترس با دیوارها
دو امکان برای مسیرها برای کاربر وجود دارد. مسیرها را میتوان یا در شکافهای بین گروههای موانع یا شکافهای بین موانع و دیوارهای یک اتاق یافت. اگر چنین مسیری پیدا نشد، کاربر نمی تواند از این اتاق عبور کند.
مشابه گلوگاه های بین موانع، گلوگاه ها به دیوار را به عنوان شکاف غیرقابل دسترس بین دیوار و مرز یک گروه مانع تعریف می کنیم. برای کاربری با ابعاد معین، با استفاده از بافر یک اتاق، تنگناهای دیوارها را تشخیص می دهیم ( شکل 11 را ببینید ). بافر با مقدار افست برابر با عرض کاربر محاسبه می شود. در گروه های موانع انتخاب شده، اگر یک گره از مرز داخل بافر باشد، یک خط عمود بر دیوار محاسبه می کنیم ( شکل 11 را ببینید ). خط عمود نشان دهنده تنگنا به دیوار است.

شکل 11. تشخیص گلوگاه بین دیوار و مرز یک گروه مانع و شناسایی لبه های غیرقابل دسترس عبور از گلوگاه ها.
برای کاربر با ابعاد داده شده، یک شبکه (به عنوان مثال، VG) می تواند در اتاقی با مرزهای گروه های موانع انتخاب شده ایجاد شود. لبه هایی که از گلوگاه ها به دیوارها عبور می کنند برای کاربر غیرقابل دسترسی هستند ( شکل 11 را ببینید ). لبه ها برای محاسبه مسیر حذف خواهند شد.
ما VG را به عنوان شبکه ناوبری پذیرفتیم. شکل 12 ایجاد VG را نشان می دهد و کوتاه ترین مسیر بین دو مکان را برای کاربران 0.8 متری نشان می دهد. اول، VG با گره های سه مرز ایجاد می شود ( شکل 12 a را ببینید). دوم، یک بافر اتاق محاسبه میشود و سه مرز روی بافر همپوشانی دارند ( شکل 12 ب را ببینید). سوم، تمام تنگناهای بین مرزها و دیوارها یافت می شوند ( شکل 12 ج را ببینید). در نتیجه، لبههای دید غیرقابل دسترس قرار دارند. چهارم، لبه های دید غیرقابل دسترسی حذف می شوند ( شکل 12 د را ببینید). در نهایت، کوتاه ترین مسیر ( شکل 12 را ببینیده) در VG محاسبه می شود. کاربر با اندازه داده شده می تواند مسیر را دنبال کند.

شکل 12. ایجاد یک نمودار دید (VG) و یک بافر اتاق، حذف لبه های غیرقابل دسترس و محاسبه یک مسیر برای کاربران با اندازه 0.8 متر. ( الف ) ایجاد VG؛ ( ب ) محاسبه بافر اتاق. ج ) یافتن لبه های غیرقابل دسترس در گلوگاه ها. ( د ) از بین بردن لبه های غیر قابل دسترس. ( ه ) مسیر محاسبه شده.
4. موارد استفاده
روش پیشنهادی شامل محاسبه MD ها، گروه بندی موانع، انتخاب گروه های موانع، ایجاد مرزها و ایجاد VG، توسط زبان C++ در محیط Visual Studio 10.0 پیاده سازی شد. ما نتایج آزمایش را در نرم افزار MicroStation V8i Bentley Systems مشاهده کردیم.
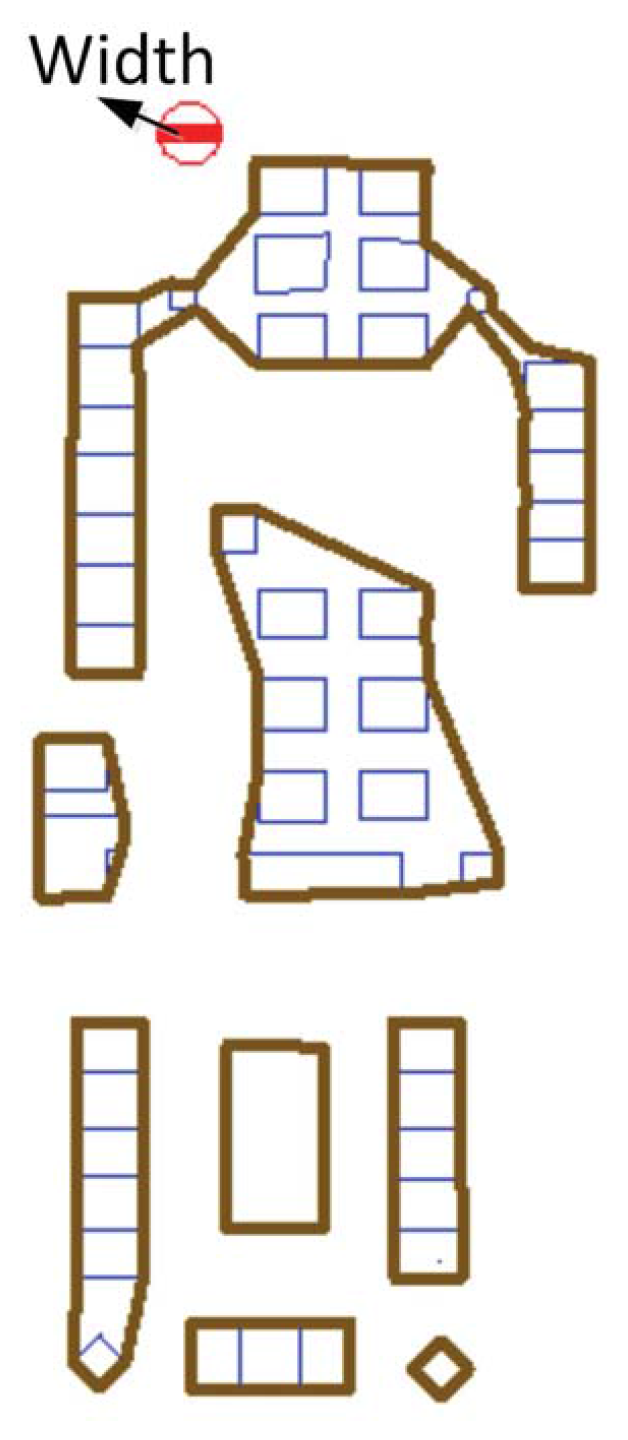
این مقاله رویکرد پیشنهادی را در دو مورد استفاده در پلانهای واقعی طبقهبندی آزمایش کرد: (1) پلان یک واحد مراقبتهای ویژه نوزادان معمولی (CNICU) در بیمارستان کودکان سنفورد [38 ] . و (2) پلان طبقه همکف ساختمان دانشکده معماری در دانشگاه صنعتی دلفت. آنها شامل تعدادی از اشیاء داخلی (به عنوان مثال، مبلمان)، که در شکل 13 نشان داده شده است . ما مسیرهای مختلفی را در دو پلان طبقه محاسبه کردیم.
اولین آزمایش در پلان طبقه CNICU است ( شکل 13 a). ما روش پیشنهادی را برای کاربری با اندازه 0.6 متر انجام دادیم ( شکل 14 را ببینید ). پس از اینکه همه MD ها را بین موانع موجود در اتاق و تنگناها محاسبه کردیم، محاسبات را با 22 گروه در مجموع به پایان رساندیم ( شکل 14 ب را ببینید). ما سه گروه ( شکل 14 ج) را در FCH بین دو در انتخاب کردیم و مرزهای غیر همپوشانی سه گروه را ایجاد کردیم ( شکل 14 د را ببینید). VGها بر اساس سه مرز و بافر اتاق محاسبه شدند. از آنجایی که دو مرز روی بافر همپوشانی دارند، لبه های غیرقابل دسترس VG را حذف کردیم ( شکل 14 را ببینیده) در نتیجه، ما مسیری را برای کاربر در این VG محاسبه کردیم.
در اینجا مسیرهای مختلفی را با توجه به سه اندازه کاربر ارائه می کنیم: 0.5 متر، 0.6 متر و 0.8 متر. در شکل 15 a، کوتاه ترین مسیر برای 0.5 متر در وسط FCH بین دو در قرار دارد. شکل 15 ب مسیر 0.6 متری را نشان می دهد. برای کاربر 0.6 متر، بخشی از مسیر روی FCH است ( شکل 15 ب را ببینید). هیچ مسیری برای کاربر 0.8 متری وجود ندارد ( شکل 15 ج را ببینید). بافر محاسبه شده به دیوارهای اتاق با مرزهای سه گروه مانع همپوشانی دارد و بنابراین، کاربر 0.8 متر نمی تواند عبور کند ( شکل 15 ج را ببینید).
شکل 13. پلان های طبقات دو ساختمان. ( الف ) کف بخش مراقبتهای ویژه نوزادان (CNICU) در بیمارستان؛ ( ب ) طبقه همکف ساختمان دانشکده معماری.
در سناریوی دیگر (نگاه کنید به شکل 13 ب)، ما بر روی یکی از فضاها شامل موانع نسبتا متراکم (مثلا میزها و ستون ها) تمرکز کردیم. مسیرها با توجه به سه اندازه کاربر محاسبه شدند: 0.5 متر، 0.8 متر و 1.0 متر. اگرچه نتایج گروه بندی متفاوت است، کوتاه ترین مسیرها برای 0.5 متر ( شکل 16 a را ببینید) و برای 0.8 متر (نگاه کنید به شکل 16 ب) یکسان است. کاربر با اندازه 1.0 متر ( شکل 16 ج را ببینید) باید مسیر دیگری را دنبال کند.

شکل 14. آزمایش رویکرد کامل بین دو مکان برای یک کاربر با اندازه 0.6 متر. ( الف ) محاسبه تنگناهای بین موانع. ( ب ) گروه بندی موانع. ( ج ) انتخاب گروه های مانع؛ ( د ) ایجاد مرزهای گروه های انتخاب شده. ( ه ) ایجاد یک VG و حذف لبه های غیر قابل دسترس.
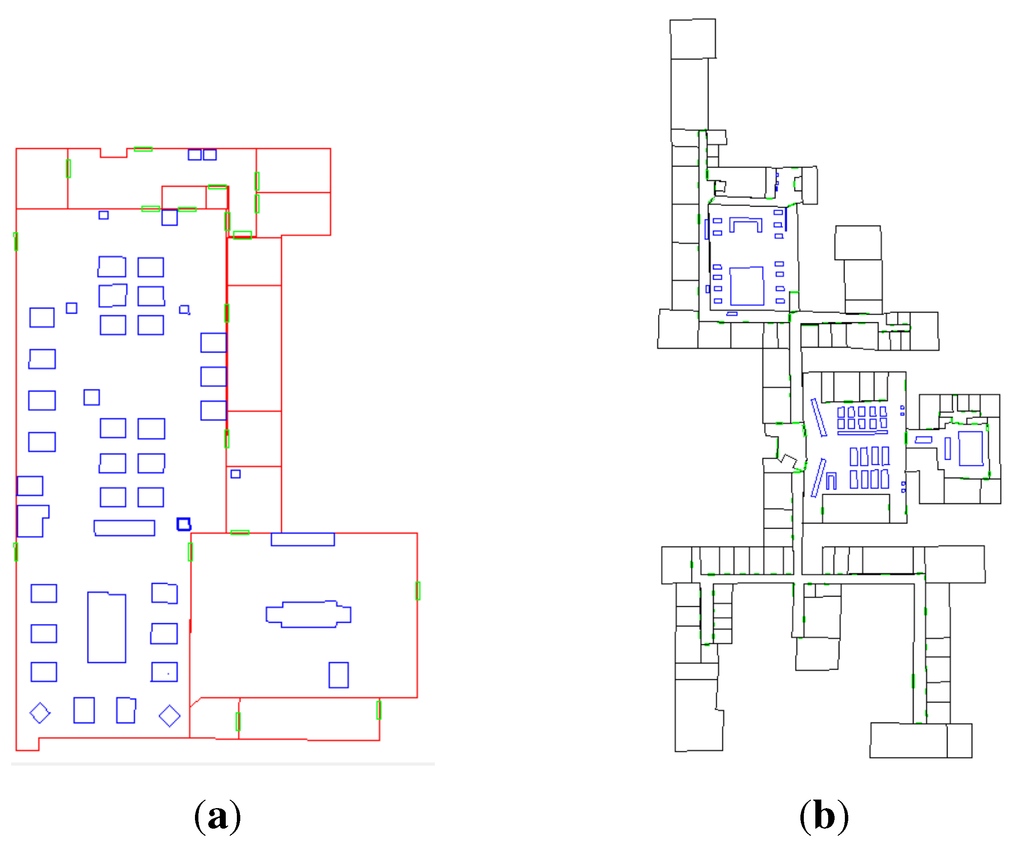
رویکرد پیشنهادی می تواند برای شبکه های ناوبری پیش محاسبه برای کاربران با ابعاد مختلف اعمال شود. شکل 17 a VG ایجاد شده با تمام موانع را بدون توجه به ابعاد کاربر نشان می دهد. VG پیچیده است و نمی تواند از محاسبه مسیر در رابطه با ابعاد کاربر پشتیبانی کند. در رویکرد پیشنهادی، میتوانیم مرحله «انتخاب گروههای مانع» را حذف کنیم و برای همه گروههای مانع در یک اتاق مرز ایجاد کنیم. به این ترتیب، تمام کوتاه ترین مسیرهای بین درهای اتاق را می توان محاسبه کرد ( شکل 17 را ببینید ). سه شبکه ( شکل 17b–d)، متشکل از کوتاه ترین مسیرهای بین درها، به ترتیب با اندازه های 0.5 متر، 0.6 متر، 0.8 متر برای کاربران از قبل محاسبه شده است. برای سایر کاربران با ابعاد داده شده می توان بلافاصله مسیرهایی را در شبکه ها برای آنها در نظر گرفت. همچنین عدم دسترسی بین درها قابل ثبت و گزارش به کاربران است. به عنوان مثال، هیچ مسیری بین درهای D2 و D8 برای کاربران 0.8 متری وجود ندارد ( شکل 17 d)، با این حال مسیرهایی بین دو درب برای کاربران 0.5 متر و 0.6 متر وجود دارد ( شکل 17 b,c).
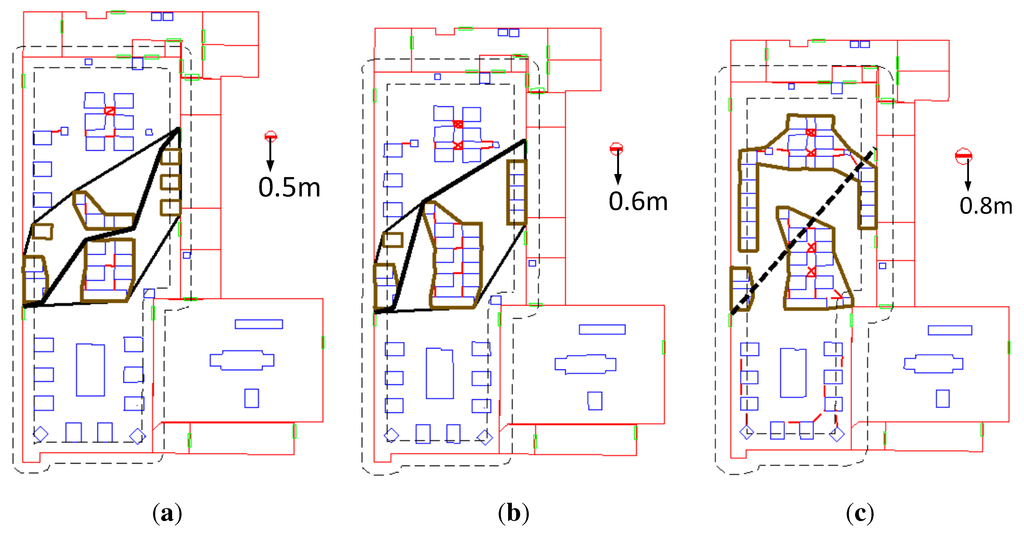
شکل 15. مسیریابی برای اندازه های 0.5 متر، 0.6 متر و 0.8 متر در پلان طبقه بیمارستان. ( الف ) کوتاهترین مسیر برای اندازه 0.5 متر. ( ب ) کوتاه ترین مسیر برای اندازه 0.6 متر. ( ج ) مسیری برای اندازه 0.8 متر وجود ندارد.
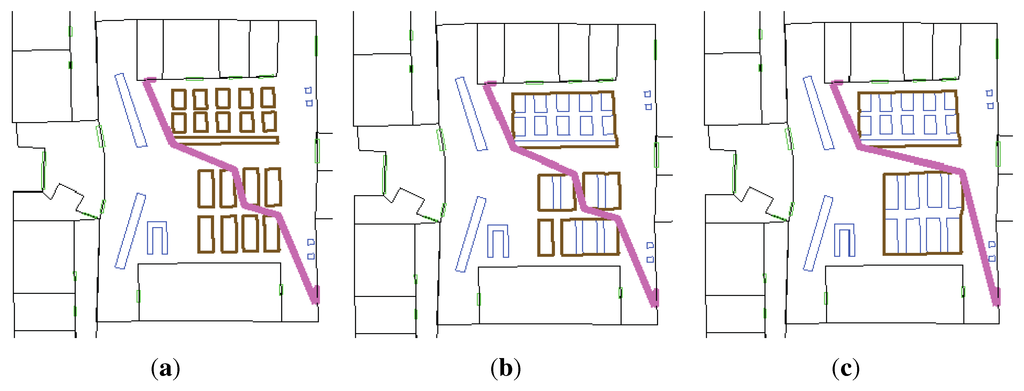
شکل 16. کوتاه ترین مسیرها برای اندازه های 0.5 متر، 0.8 متر و 1.0 متر در پلان طبقه ساختمان پردیس. ( الف ) مسیر برای اندازه 0.5 متر؛ ( ب ) مسیر برای اندازه 0.8 متر؛ ( ج ) مسیر برای اندازه 1.0 متر.
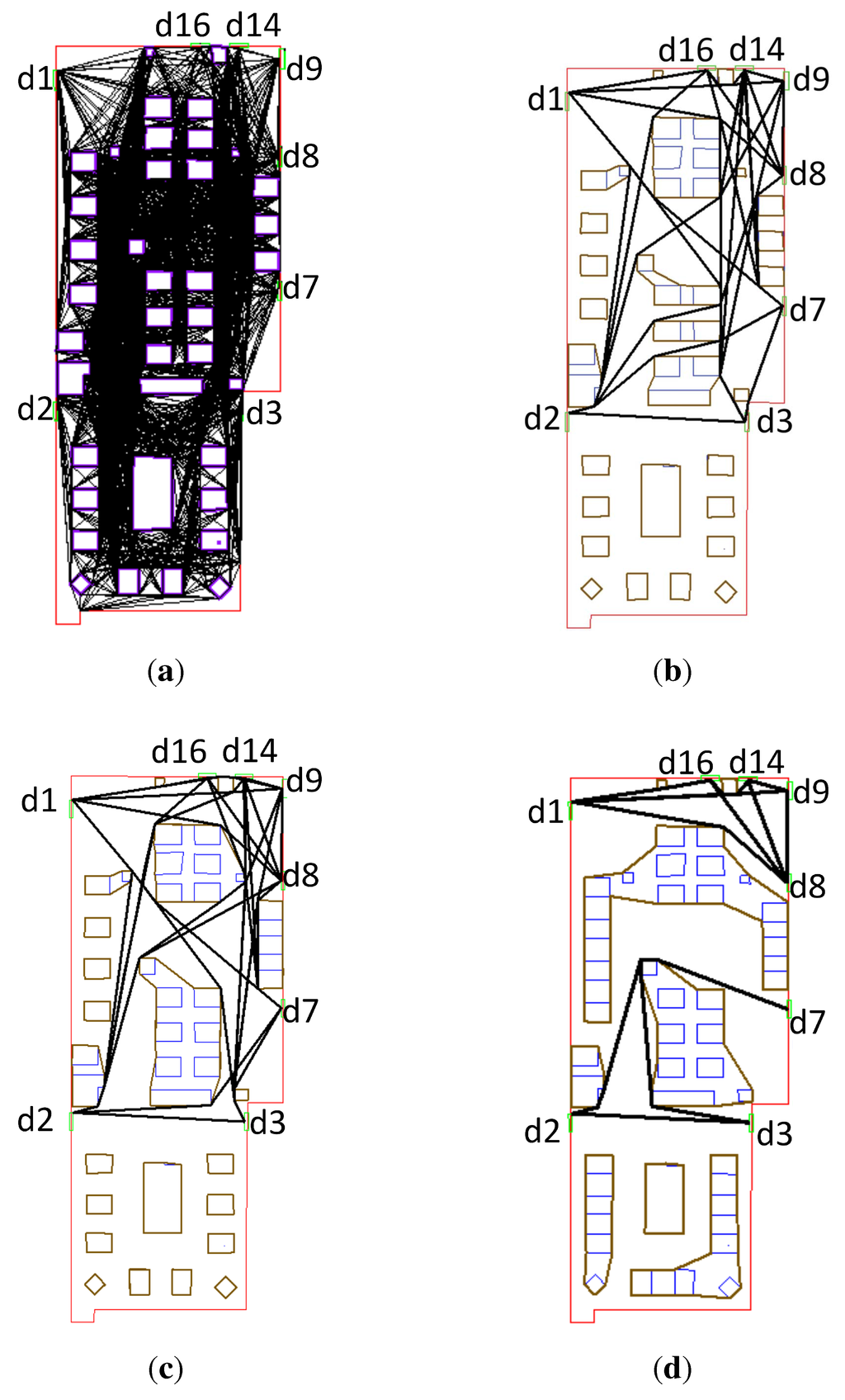
شکل 17. ( الف ) VG بدون توجه به ابعاد کاربر و ( b – d ) همه کوتاهترین مسیرها بین تمام درها برای اندازه های 0.5 متر، 0.6 متر و 0.8 متر. (الف) VG کامل همه موانع بدون توجه به ابعاد کاربر. (ب) تمام کوتاهترین مسیرها برای کاربر با اندازه 0.5 متر؛ ج) همه کوتاهترین مسیرها برای یک کاربر با اندازه 0.6 متر؛ (د) همه کوتاهترین مسیرها برای کاربر با اندازه 0.8 متر.
5. نتیجه گیری ها
در این مقاله، ما یک روش جدید برای محاسبه مسیرها برای کاربران با ابعاد مختلف پیشنهاد کردیم. روش پیشنهادی موانع را گروه بندی کرده و چندضلعی های ساده را جایگزین گروه ها می کند. در مقایسه با مجموع Minkowski، این رویکرد تضمین می کند که این چند ضلعی ها حلقه های داخلی ندارند. تعداد رئوس هایی که برای ساخت یک شبکه ناوبری در نظر گرفته می شود نیز به میزان قابل توجهی کاهش می یابد. ما نشان دادهایم که روش پیشنهادی میتواند مسیری را برای حرکت از میان موانع محاسبه کند یا گزارش دهد که هیچ مسیری بین دو مکان یافت نمیشود. ما روش پیشنهادی را در چندین مورد استفاده نشان دادهایم.
این رویکرد همچنین می تواند برای ایجاد شبکه های ناوبری برای کاربران با ابعاد مختلف استفاده شود ( شکل 17 را ببینید ). برای هر کاربر، ابتدا می توان تمام کوتاه ترین مسیرهای بین درها را از پیش محاسبه کرد. شبکه های این مسیرها را می توان در یک پایگاه داده نگهداری کرد و بر اساس درخواست مسیر مورد استفاده قرار داد. همچنین در صورت عدم وجود مسیر می توان به کاربر اطلاع داد. اطلاعات دسترسی حتی می تواند به عنوان ویژگی هر اتاق ثبت شود و برای کاربران به کار گرفته شود تا به طور کلی امکان عبور از اتاق های خاص را تخمین بزنند.
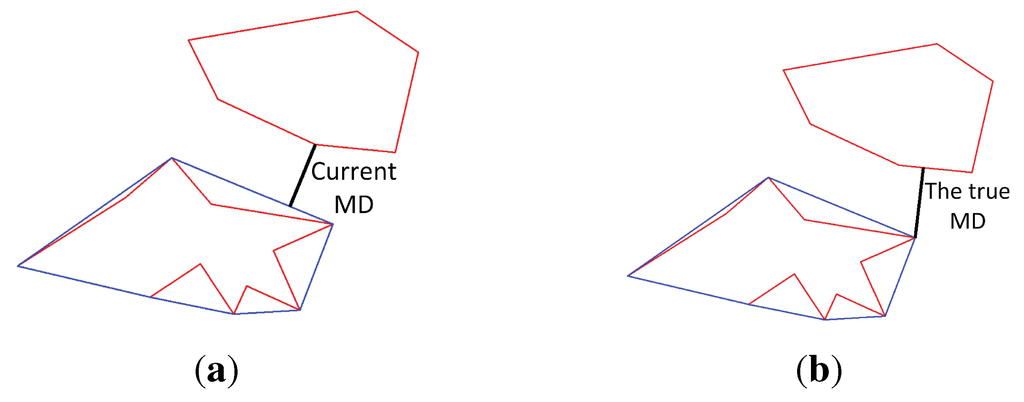
این رویکرد از چند جنبه قابل بهبود است. اول، MD بین چند ضلعی های غیر محدب باید در نظر گرفته شود، زیرا MD های فعلی محاسبه شده ممکن است در برخی موارد دقیق نباشند. در حال حاضر، ما MD را بین CHs موانع محاسبه می کنیم. شکل 18 تفاوت در MD محاسبه شده بین یک مانع محدب و CH یک مانع غیر محدب را نشان می دهد. MD واقعی ( شکل 18 ب) بین دو مانع بزرگتر از محاسبه شده ( شکل 18 الف) است که از رویکرد فعلی به دست آمده است. در این مورد، زمانی که MD محاسبه شده عدم دسترسی را نشان می دهد، شکاف بین دو مانع ممکن است همچنان برای کاربر قابل دسترسی باشد.
شکل 18. حداقل فاصله های محاسبه شده و واقعی (MDs) بین یک مانع محدب و یک مانع غیر محدب. ( الف ) MD محاسبه شده در رویکرد ما. ( ب ) MD واقعی.
نکته دوم در مورد ایجاد مرز یک گروه مانع است. در حال حاضر، مرزهای ایجاد شده توسط رویکرد ما همیشه حداقل مرز بیرونی نیستند. برای مثال، سه مانع ( شکل 19 الف) در یک گروه قرار دارند. شکل 19 ب نتیجه رویکرد ما را نشان می دهد. مرز بهدستآمده، مرز دقیق سه مانع با حداقل مساحت نیست، اما مرز یک چندضلعی معتبر است ( یعنی هیچ لبهها و رئوس روی هم تداخل ندارند). این مرز را می توان برای انسان معقول در نظر گرفت، زیرا افراد تمایل دارند به جای رفتن به درون خود، از موانع اجتناب کنند. با این حال، مرز دقیق ( شکل 19ج) ممکن است برای برنامهریزی حرکتی رباتها مناسبتر باشد، بهویژه در مواردی (مثلاً جاروبرقیهای روباتیک) که باید از کل فضای آزاد اطراف موانع عبور کرد.
در حال حاضر، کاربر را با تجهیزات به صورت دایره ساده می کنیم که ما را از در نظر گرفتن چرخش کاربران رها می کند. شکل 20 a نشان می دهد که شکاف موجود در دیوار می تواند بدون توجه به جهت گیری کاربر توسط کاربر عبور کند، زیرا قطر کاربر از شکاف کوچکتر است. شکل 20b نشان می دهد که کاربر زاویه کوچکی را می چرخاند، اما شکاف را نمی توان طی کرد، زیرا قطر بزرگتر از شکاف فعلی است. وقتی کاربر 90 درجه می چرخد، سمت کوتاه کاربر کوچکتر از شکاف است. کاربر همچنان می تواند از شکاف عبور کند، اگرچه قطر آن بزرگتر از شکاف است. میتوانیم حداقل اندازه کاربر را در نظر بگیریم و مسیری را به دست آوریم که گزینههای بیشتری برای عبور ارائه دهد، اما پس از آن، باید اطمینان حاصل کنیم که فضای کافی برای چرخش تجهیزات در جلوی گلوگاه وجود دارد. این امر مستلزم بهبود رویکرد ما برای نشان دادن زمان زمانی است که کاربر باید برای عبور از یک گلوگاه بچرخد.

شکل 19. مرزهای سه مانع در روش ما و در شرایط سخت. الف ) سه مانع ؛ ( ب ) مرز ما برای گروه سه مانع. ( ج ) یک مرز دقیق برای گروه سه مانع.
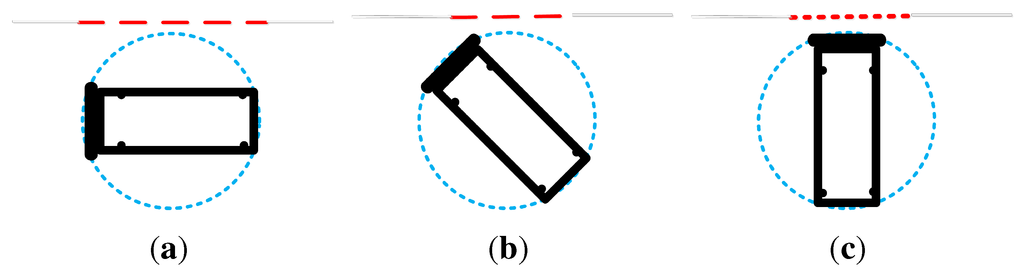
شکل 20. ( الف ) کاربر می تواند از شکافی بزرگتر از قطر دایره کاربر عبور کند. ( ب ) وقتی قطر بزرگتر است کاربر نمی تواند از شکاف عبور کند. و ( ج ) کاربر می تواند پس از یک چرخش 90 درجه از شکاف عبور کند. (الف) کاربر می تواند از شکاف عبور کند که طول آن از قطر دایره بیشتر باشد. (ب) زمانی که طول آن از قطر دایره کوتاهتر است، کاربر نمی تواند از شکاف عبور کند. ج) کاربر می تواند از شکاف عبور کند زیرا ضلع کوتاه کاربر از شکاف کوچکتر است، اگرچه قطر دایره بزرگتر از شکاف است.
در آینده، MD بین چند ضلعی های غیر محدب در نظر گرفته خواهد شد. سپس، تنگناهای بین موانع بهتر برآورد می شود. ما همچنین قصد داریم بررسی کنیم که چگونه روش تولید مرزی را می توان بهبود بخشید. مرزهای محاسبهشده گروههای موانع باید مرزهای سختگیرانه را بدون از دست دادن اعتبارشان تقریب بزنند. علاوه بر این، بررسی خواهیم کرد که چگونه می توان شکل واقعی یک کاربر (با تجهیزات) را در نظر گرفت.
موضوع جالب دیگر برای کار آینده، محاسبه مسیر با در نظر گرفتن اجسام متحرک است. به عنوان مثال، اشیاء متحرک را می توان ردیابی کرد و شکل آنها را می توان در پلان طبقه در بازه های زمانی مختلف به روز کرد. میتوانیم روش خود را اغلب در بازههای زمانی مختلف برای بهروزرسانی نقشههای مسیر اعمال کنیم (مثلاً مواردی که در شکل 17 هستند ). جزئیات در آینده بررسی خواهد شد.
در حال حاضر، روش پیشنهادی برای یک اتاق در نظر گرفته شده است و مسیرها را می توان بین هر دو مکان در یک اتاق محاسبه کرد. هیچ توجهی به مسیرهای بین دو مکان در اتاق های مجزا نشده است. اگر بین دو اتاق مجاور درهای متعددی وجود داشته باشد، باید یک در را از بین گزینه های متعدد انتخاب کنیم. تحقیقات آینده باید انتخاب درب اتاق بعدی را بررسی کند.
منابع
- گوتز، ام. Zipf، A. تعریف رسمی یک نمودار مسیریابی سازگار با کاربر و طول بهینه برای محیط های داخلی پیچیده. ژئو اسپات. Inf. علمی 2011 ، 14 ، 119-128. [ Google Scholar ] [ CrossRef ]
- لرتلاکخانکول، ج. لی، ی. چوی، جی. Bu, S. GongPath: توسعه سیستم ناوبری عابر پیاده داخلی مبتنی بر BIM. در جریان پنجمین کنفرانس مشترک بین المللی INC، IMS و IDC، سئول، کره، 25 تا 27 اوت 2009. صص 382-388.
- سوبودزینسکی، م. Raubal, M. الگوریتم مسیریابی داخلی برای نابینایان: توسعه و مقایسه با یک الگوریتم مسیریابی برای افراد بینا. بین المللی جی. جئوگر. Inf. علمی 2009 ، 23 ، 1315-1343. [ Google Scholar ] [ CrossRef ]
- هوکر، ام. برخان، وی. Kneidl، A. بورمان، ا. رویکردهای مبتنی بر نمودار کلین، دبلیو برای شبیهسازی دینامیک عابر پیاده در مدلهای ساختمان. در جریان هشتمین کنفرانس اروپایی مدل سازی محصول و فرآیند (ECPPM)، کورک، جمهوری ایرلند، 14 تا 16 سپتامبر 2010.
- Kneidl، A. بورمان، ا. هارتمن، دی. تولید و استفاده از نمودارهای ناوبری پراکنده برای مدلهای شبیهسازی عابر پیاده میکروسکوپی. Adv. مهندس Inf. 2012 ، 26 ، 669-680. [ Google Scholar ] [ CrossRef ]
- لیو، ال. زلاتانوا، اس. یک استراتژی مسیریابی دو سطحی برای ناوبری داخلی. در سیستم های هوشمند مدیریت بحران ; Zlatanova, S., Peters, R., Dilo, A., Scholten, H., Eds. Springer: برلین، آلمان، 2013; جلد 7418، ص 31–42. [ Google Scholar ]
- شوگارد، ک. گرونبک، ک. Scharling، T. ناوبری عابر پیاده داخلی بر اساس برنامه ریزی مسیر ترکیبی و مدل سازی مکان. در محاسبات فراگیر ؛ Kay, J., Lukowicz, P., Tokuda, H., Olivier, P., Krüger, A., Eds.; Springer: برلین، آلمان، 2012; صص 289-306. [ Google Scholar ]
- برگ، MD; چئونگ، او. کرولد، ام وی. Overmars, M. Computational Geometry: Algorithms and Applications , 3rd ed.; Springer: Santa Clara، CA، USA، 2008. [ Google Scholar ]
- کوئنن، اس. Steinbuch، MM; Molengraft، VDM; لوننبورگ، جی. Naus, G. Motion Planning for Mobile Robots—A Guide. پایان نامه کارشناسی ارشد، دانشگاه صنعتی آیندهوون، آیندهوون، هلند، 2012. [ Google Scholar ]
- Open Geospatial Consortium, Inc. OpenGIS Implementation Specification برای اطلاعات جغرافیایی — دسترسی به ویژگی های ساده — قسمت 1: معماری مشترک ; کنسرسیوم فضایی باز، شرکت: Wayland، MA، ایالات متحده آمریکا، 2011. [ Google Scholar ]
- یوان، دبلیو. Schneider, M. برنامه ریزی مسیر داخلی سه بعدی برای اشیاء با شکل دلخواه. در سیستم های پایگاه داده برای برنامه های کاربردی پیشرفته ; Xu, J., Yu, G., Zhou, S., Unland, R., Eds.; Springer: برلین، آلمان، 2011; صص 120-131. [ Google Scholar ]
- چن، ال سی; وو، CH; شن، تی اس; Chou, CC کاربرد مدلهای شبکه هندسی و مدلهای اطلاعات ساختمان در محیطهای مکانی برای شبیهسازیهای اطفاء حریق. محاسبه کنید. محیط زیست سیستم شهری 2014 ، 45 ، 1-12. [ Google Scholar ] [ CrossRef ]
- لی، جی. پیادهسازی مبتنی بر دسترسی مکانی یک مدل داده توپولوژیکی GIS سه بعدی برای موجودیتهای شهری. GeoInformatica 2004 ، 8 ، 237-264. [ Google Scholar ] [ CrossRef ]
- لورنز، بی. اوهلباخ، اچ. Stoffel، EP یک مدل فضایی ترکیبی برای نمایش محیط های داخلی. در وب و سیستم های اطلاعات جغرافیایی بی سیم ; Carswell, J., Tezuka, T., Eds. Springer: برلین، آلمان، 2006; صص 102-112. [ Google Scholar ]
- مایجرز، ام. زلاتانوا، اس. Pfeifer, N. اطلاعات جغرافیایی سه بعدی در داخل ساختمان: ساختار برای تخلیه. در مجموعه مقالات اولین کارگاه بین المللی در مورد مدل های شهر سه بعدی نسل بعدی، بن، آلمان، 21 تا 22 ژوئن 2005.
- تیل، JC; دائو، THD; ژو، ی. سفر در شهر سه بعدی: کاربردها در برنامه ریزی مسیر، ارزیابی دسترسی، تجزیه و تحلیل مکان و فراتر از آن. J. Transp. Geogr. 2011 ، 19 ، 405-421. [ Google Scholar ] [ CrossRef ]
- هان، CS; قانون، KH; Latombe، JC; Kunz، JC یک رویکرد مبتنی بر عملکرد برای تجزیه و تحلیل مسیر قابل دسترسی با صندلی چرخدار. Adv. مهندس Inf. 2002 ، 16 ، 53-71. [ Google Scholar ] [ CrossRef ]
- کوستیچ، ن. Scheider, S. تولید خودکار اطلاعات دسترسی در فضای داخلی برای افراد دارای اختلال حرکتی. در AGILE 2015 ; Bacao, F., Santos, MY, Painho, M., Eds. Springer: برلین، آلمان، 2015; صص 235-252. [ Google Scholar ]
- عثمانی، ر. موسوی، ع. Pruski، A. یک رویکرد جدید برای دسترسی به فضای داخلی. بین المللی J. Smart Home 2009 ، 3 ، 1-14. [ Google Scholar ]
- پروسکی، الف. یک رویکرد واحد به دسترسی برای یک فرد روی ویلچر. ربات. Auton. سیستم 2010 ، 58 ، 1177-1184. [ Google Scholar ] [ CrossRef ]
- چین، اف. Wang, CA حداقل فاصله راس بین چند ضلعی های محدب قابل جداسازی. Inf. روند. Lett. 1984 ، 18 ، 41-45. [ Google Scholar ] [ CrossRef ]
- Toussaint، GT; Bhattacharya، BK الگوریتم های بهینه برای محاسبه حداقل فاصله بین دو مجموعه مسطح محدود. تشخیص الگو Lett. 1983 ، 2 ، 79-82. [ Google Scholar ] [ CrossRef ]
- Toussaint, G. حل مسائل هندسی با کولیس های دوار. در مجموعه مقالات کنفرانس الکتروتکنیکال مدیترانه 1983، آتن، یونان، 24-26 مه 1983.
- یانگ، CL; چی، م. منگ، XX; لی، XQ; Wang, JY یک الگوریتم سریع جدید برای محاسبه فاصله بین دو چند ضلعی محدب مجزا بر اساس نمودار Voronoi. دانشگاه ژجیانگ. علمی A 2006 , 7 , 1522-1529. [ Google Scholar ] [ CrossRef ]
- لی، ز. یان، اچ. آی، تی. چن، جی. تعمیم خودکار ساختمان بر اساس مورفولوژی شهری و نظریه گشتالت. بین المللی جی. جئوگر. Inf. علمی 2004 ، 18 ، 513-534. [ Google Scholar ] [ CrossRef ]
- آکیراجو، ن. ادلسبرونر، اچ. فاچلو، ام. فو، پی. Mcke، EP; Varela, C. Alpha shapes: تعریف و نرم افزار. در مجموعه مقالات اولین کارگاه بین المللی نرم افزار هندسه محاسباتی، مینیاپولیس، MN، ایالات متحده، 20 ژانویه 1995; ص 63-66.
- ادلسبرونر، اچ. Mücke، EP اشکال آلفای سه بعدی. ACM Trans. نمودار 1994 ، 13 ، 43-72. [ Google Scholar ] [ CrossRef ]
- Alt، H.; Welzl, E. نمودارهای دید و کوتاهترین مسیرهای جلوگیری از موانع. Z. Oper. Res. 1988 ، 32 ، 145-164. [ Google Scholar ] [ CrossRef ]
- آسانو، تی. آسانو، تی. گیباس، ال. هرشبرگر، جی. Imai, H. رویت چند ضلعی های منفصل. الگوریتمیکا 1986 ، 1 ، 49-63. [ Google Scholar ] [ CrossRef ]
- Geraerts, R. برنامه ریزی مسیرهای کوتاه با فاصله با استفاده از راهروهای صریح. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد رباتیک و اتوماسیون، انکوریج، AK، ایالات متحده آمریکا، 3-7 مه 2010. صفحات 1997-2004.
- Ghosh, SK; Mount, DM یک الگوریتم حساس به خروجی برای محاسبه نمودارهای دید. SIAM J. Comput. 1991 ، 20 ، 888-910. [ Google Scholar ] [ CrossRef ]
- هرشبرگر، جی. سوری، اس. یک الگوریتم بهینه برای کوتاهترین مسیرهای اقلیدسی در صفحه. SIAM J. Comput. 1999 ، 28 ، 2215-2256. [ Google Scholar ] [ CrossRef ]
- کاپور، اس. ماهشواری، س.ن. میچل، JSB یک الگوریتم کارآمد برای کوتاهترین مسیرهای اقلیدسی در میان موانع چند ضلعی در صفحه. گسسته. محاسبه کنید. Geom. 1997 ، 18 ، 377-383. [ Google Scholar ] [ CrossRef ]
- Overmars، MH; Welzl, E. روشهای جدید برای محاسبه نمودارهای دید. در مجموعه مقالات چهارمین سمپوزیوم سالانه هندسه محاسباتی، Urbana-Champaign، IL، ایالات متحده، 6-8 ژوئن 1988; صص 164-171.
- Welzl, E. ساختن نمودار دید برای بخشهای n خط در زمان O(n2 ) . Inf. روند. Lett. 1985 ، 20 ، 167-171. [ Google Scholar ] [ CrossRef ]
- اسمیت، MJD; Goodchild، MF; Longley، تجزیه و تحلیل جغرافیایی PA— راهنمای جامع اصول، تکنیک ها و ابزارهای نرم افزاری ، ویرایش دوم. Troubador Publishing Ltd.: Leicester, UK, 2007. [ Google Scholar ]
- Dijkstra, E. یادداشتی در مورد دو مشکل در ارتباط با نمودارها. عدد. ریاضی. 1959 ، 1 ، 269-271. [ Google Scholar ] [ CrossRef ]
- استیونز، دی. اکرم خان، م. مونسون، دی. رید، ای جی; هلسث، سی. باگی، جی. تأثیر طراحی معماری بر قرار گرفتن در معرض صدا و نور محیطی نوزادانی که به مراقبت های ویژه نیاز دارند: ارزیابی مهد کودک مراقبت های ویژه نوزادان بوکلهاید. جی پریناتول. 2007 ، 27 ، 20-28. [ Google Scholar ] [ CrossRef ] [ PubMed ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر