

خلاصه
پایش رطوبت سطحی خاک (SM) یک وظیفه حیاتی در کاربردهای کشاورزی دقیق است. مانیتورینگ SM شامل نظارت بر تصاویر سنجش از راه دور و درجا می باشدنظارت مشاهداتی مبتنی بر حسگر رایانش ابری می تواند کارایی محاسباتی را به شدت افزایش دهد. یک وب سرویس جغرافیایی برای کمک به تصمیم گیری زراعی توسعه داده شد و این ابزار می تواند برای هر مکان و محصولی مقیاس شود. با ادغام محاسبات ابری و زیرساخت اطلاعاتی مبتنی بر وب سرویس، این مطالعه از زیرساخت فضایی-زمانی سایبری فیزیکی (CESCI) فعال با رایانش ابری برای ارائه راهحلی کارآمد برای نظارت بر رطوبت خاک در کشاورزی دقیق استفاده میکند. در سمت سرور CESCI، سرویسهای وب کنسرسیوم فضایی باز متنوع با یکدیگر کار میکنند. استان هوبی، واقع در دشت جیانگهان در مرکز چین، به عنوان منطقه مطالعه سنجش از دور در این آزمایش انتخاب شده است. رشته تجربی علمی Baoxie در شهر ووهان به عنوان درجا انتخاب شده استمنطقه مطالعه حسگر نتایج نشان میدهد که روش پیشنهادی کارایی نقشهبرداری تصاویر سنجش از دور و درونیابی رطوبت خاک در محل را افزایش میدهد . علاوه بر این، روش پیشنهادی با سایر زیرساختهای کشاورزی دقیق موجود مقایسه میشود. در این مقایسه، زیرساخت پیشنهادی نقشهبرداری رطوبت خاک در استان هوبی را در 1.4 دقیقه و در زمان واقعی درونیابی رطوبت خاک در محل را به شیوهای کارآمد انجام میدهد. علاوه بر این، یک روش نظارت بر عملکرد پیشرفته میتواند به کاهش هزینهها در نظارت بر کشاورزی دقیق و همچنین افزایش بهرهوری کشاورزی و درآمد خالص کشاورزان کمک کند.
کلید واژه ها:
نظارت بر رطوبت خاک ؛ سنجش از دور ؛ سنسورهای درجا ؛ رایانش ابری ؛ زیرساخت فیزیکی سایبری ; سرویس وب
چکیده گرافیکی
1. معرفی
1.1. شبکه سنسور و نظارت بر رطوبت خاک (SM) در کشاورزی دقیق
مفهوم کشاورزی دقیق (PA) مبتنی بر وجود تنوع زمانی و مکانی درون مزرعه ای در ویژگی های خاک و محصول است [ 1 ، 2 ]. این مفهوم فناوری اطلاعات را با اصول کشاورزی ترکیب می کند تا این تنوع مکانی و زمانی در فرآیند تولید کشاورزی را مدیریت کند [ 3 ، 4 ]. با استفاده از فناوری پیشرفته تر، PA امکان پذیر است و می توان آن را عملی کرد [ 5 ]. رطوبت خاک (SM) نقش مهمی در توصیف تبدیل انرژی ژئوگاز، گردش آب و بسیاری از فرآیندهای آب و هوایی و هیدرولوژیکی [ 6 ]، مانند پیش بینی جریان [ 7 ]، رواناب، کنترل فرسایش [ 8] ایفا می کند.]، SM و تعاملات بین پدیده های هواشناسی [ 9 ]. SM برای PA ضروری است زیرا شرایط SM برای کیفیت و عملکرد محصول حیاتی است.
برای کمک به نظارت دقیق و لحظه ای محصولات، شبکه های حسگر فضایی به طور گسترده برای نظارت جامع و مداوم SM و برنامه های هشدار بلایا در خشکی، اقیانوس، جو و محیط های زیست محیطی مورد استفاده قرار گرفته اند. نظارت بر SM با حسگرها، معمولاً روی ماهواره ها، یک منطقه تحقیقاتی فعال است [ 10 ، 11 ]. علاوه بر استفاده از حسگرهای درجا در مانیتورینگ SM [ 12 ، 13 ]، دادههای رصد زمین (EOD) نیز به طور گسترده در پایش SM استفاده میشوند [ 14 ، 15]]. ابتکار فعالسازی وب حسگر کنسرسیوم فضایی باز (OGC) وب حسگر را به عنوان زیرساختی تعریف می کند که امکان دسترسی به شبکه های حسگر و داده های حسگر آرشیو شده را فراهم می کند که می تواند با استفاده از پروتکل ها و رابط های استاندارد کشف و دسترسی داشته باشد [16 ] . بر خلاف یک شبکه حسگر، یک وب حسگر لایه های دستگاه زیرین، جزئیات ارتباط شبکه و سخت افزار حسگر ناهمگن را پنهان می کند [ 17 ].
1.2. اطلاعات، زیرساخت ها و مشکلات سایبری-فیزیکی زمین فضایی کشاورزی دقیق (PA)
رشد محصولات یک فرآیند پویا و جامع است. بنابراین، باید به نظارت PA توجه بیشتری شود. نیازهای متنوع نظارت بر محصول در PA شامل ایستگاههای نظارت، عکسبرداری هوایی، ماهوارهها و حسگرهای درجا است. با این حال، رویکردهای نظارت بر کشاورزی دشوار و جامع نیستند، زیرا مناطق کشاورزی وسیع هستند و قابلیت و به موقع نظارت بر حسگر محدود است.
زیرساخت سایبری (CI) از سیستمهای محاسباتی، سیستمهای ذخیرهسازی دادهها، ابزارها و مخازن دادههای پیشرفته، محیطهای تجسم و افراد تشکیل شده است. همه این مؤلفهها توسط نرمافزار و شبکههای با کارایی بالا برای بهبود بهرهوری تحقیق و امکان پیشرفتهایی که در غیر این صورت ممکن نیست، به هم مرتبط میشوند [ 18 ، 19 ].
سیستم اطلاعات جغرافیایی مبتنی بر زیرساخت سایبری (GIS) به عنوان یک شکل اساساً جدید از سیستم اطلاعات جغرافیایی ظهور کرده است که شامل یکپارچگی یکپارچه از CI، GIS، تجزیه و تحلیل فضایی، و قابلیتهای مدلسازی است. GIS مبتنی بر زیرساخت سایبری احتمالاً منجر به پیشرفتهای علمی گسترده و تأثیرات اجتماعی گسترده میشود [ 20 ، 21 ، 22 ] با امکان تجزیه و تحلیل مجموعه دادههای فضایی بزرگ، تحلیلها و مدلسازی فضایی فشرده محاسباتی، و تصمیمگیری مشترک زمینفضایی با حل و تصمیمگیری همزمان. تعداد زیادی از کاربران [ 23 ، 24 ، 25 ].
کردوان و همکاران یک زیرساخت داده های جغرافیایی قابل همکاری برای PA [ 26 ] پیشنهاد کرد. زیرساخت داده های مکانی به دلیل محدودیت های سازمانی، حقوقی و فنی ایجاد شد. با استفاده از سرویس نقشه برداری وب OGC و سرویس ویژگی وب برای پیاده سازی زیرساخت داده مکانی برای PA، بازیگران مختلف در سناریوی ما به طرق مختلفی از جمله کاهش افزونگی داده ها، کاهش تبدیل داده ها، کاهش تلاش های ارتباطی، بهبود گردش کار و غیره سود خواهند برد .
ژانگ و همکاران یک سیستم انتشار داده های سنجش از دور مبتنی بر وب را توسعه داد تا به کاربران نهایی دسترسی آسان و رایگان به انواع تصاویر و محصولات در زمان واقعی نزدیک کند [ 27 ]. با استفاده از آن، کاربران به تصاویر ماهوارهای و هوایی دسترسی دارند که نه تنها ارجاعهای جغرافیایی و تصحیح جوی دارند، بلکه در زمان واقعی نیز میشوند.
محمود سیستم اطلاعات خاک امارات متحده عربی را توسعه داد، یک مخزن مبتنی بر وب از داده های خاک با نمایش جغرافیایی. این سیستم داده های توصیفی، کمی و جغرافیایی را در یک رابط ساده برای انتشار اطلاعات ارزش افزوده خاک جمع آوری شده از بررسی های خاک ارائه می دهد. این اطلاعات به تصمیم گیرندگان، تدوینکنندگان سیاست، برنامهریزان کاربری زمین و کشاورزان اجازه میدهد تا منابع خاک را به طور کارآمد مدیریت کنند [ 28 ].
1.3. مشارکت و سازمان
فناوری محاسبات ابری و خوشه های پایگاه داده توزیع شده راه های جدیدی از تفکر و محاسبات را ارائه می دهند [ 29 ]. هدف این مقاله ارائه یک زیرساخت فضایی-زمانی سایبری فیزیکی با رایانش ابری (CESCI) است که نظارت کارآمد SM را برای کمک به غلبه بر موانع فوقالذکر ممکن میسازد. تمرکز این مقاله افزایش عملکرد نظارت رویکرد مبتنی بر سنجش از دور و حسگرهای درجا است. با استفاده از فناوری مدرن برای نظارت، عملکرد نقشه برداری EOD SM بهبود یافته است و مشاهدات حسگر درجا را می توان در زمان واقعی تجزیه و تحلیل کرد. بر اساس فناوری محاسبات ابری، چارچوب CESCI در بخش 2 توضیح داده شده است . دو آزمایش در انجام می شودبخش 3 برای اعتبارسنجی انعطافپذیری چارچوب پیشنهادی، از جمله سناریوی حسگر درجا و سناریوی مبتنی بر سنجش از دور. شایستگی ها در بخش 4 مورد بحث قرار گرفته است .
2. زیرساخت فضایی-زمانی سایبری-فیزیکی مجهز به محاسبات ابری (CESCI)
2.1. چارچوب CESCI
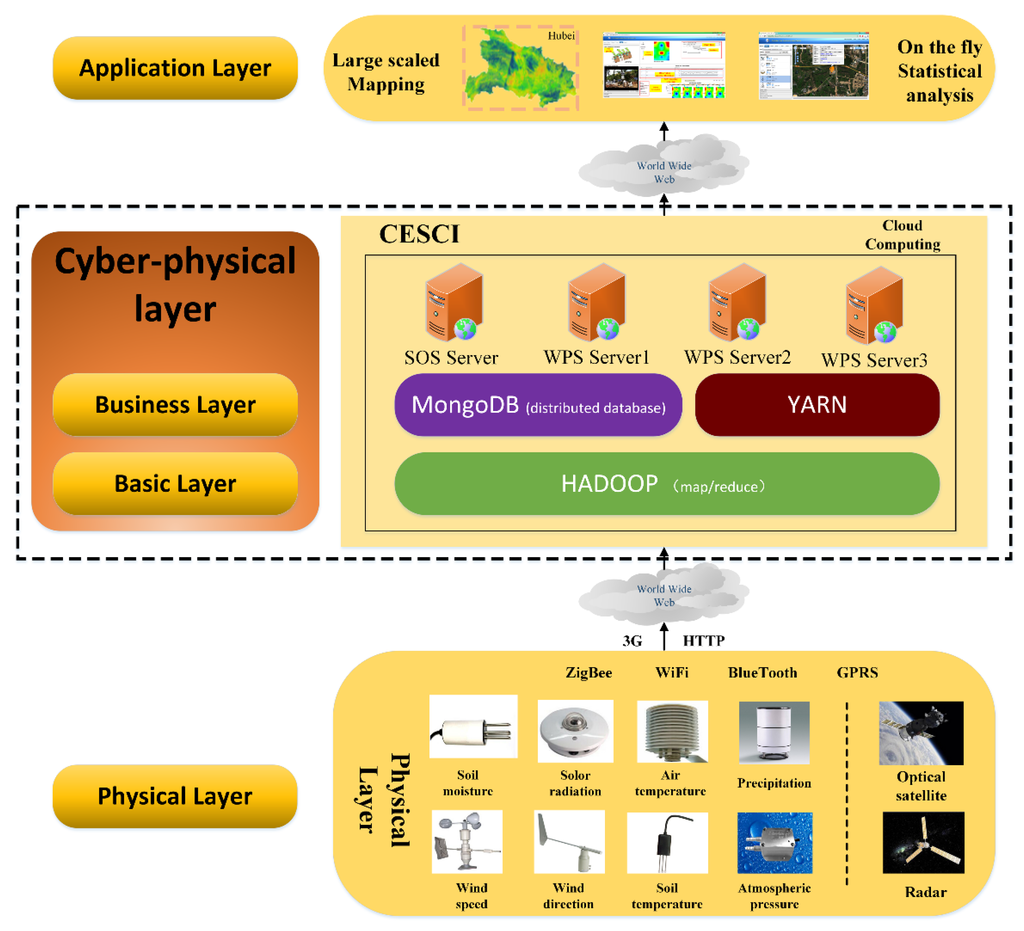
برای طراحی چارچوب، سه ویژگی باید در نظر گرفته شود: در دسترس بودن، مقیاس پذیری و محاسبات با کارایی بالا. در این زمینه، CESCI به دو بخش توزیع شده تقسیم می شود. یکی سرور درخواست و پاسخ CESCI است که به عنوان لایه سرور CESCI عمل می کند و دیگری لایه محیط ابری است که وظیفه تکمیل کار را بر عهده دارد. شکل 1 معماری کلی CESCI را نشان می دهد که از اجزای زیر تشکیل شده است: لایه کاربردی، لایه تجاری، لایه پایه و لایه فیزیکی. علاوه بر لایه کاربردی و لایه فیزیکی، لایههای تجاری و پایه با اجرای محاسبات ابری فعال میشوند. لایه پایه محیط عملیاتی اولیه را فراهم می کند.
همانطور که در شکل 1 توضیح داده شد ، لایه کاربردی می تواند نقشه برداری در مقیاس بزرگ، تجزیه و تحلیل آماری در حال پرواز و غیره را انجام دهد . برخلاف برنامههای قبلی، CESCI نقشهبرداری در مقیاس بزرگ را تسهیل میکند، که شامل محدودههای فضایی بزرگ، مانند استان هوبی، ایالت فلوریدا یا چین است. علاوه بر این، مشاهدات حسگر درجا را می توان در پرواز تجزیه و تحلیل کرد و CESCI می تواند نیازهای محاسباتی مشاهدات حسگر عظیم را برآورده کند.
لایه فیزیکی سایبری یک زیرساخت وب سرویس است که توسط مکانیزم های محاسبات ابری حاوی لایه تجاری و لایه پایه تقویت شده است. در ترکیب با مدل محاسباتی و سیستم ذخیره سازی، وب سرویس عملکرد بالاتری نسبت به روش های قبلی دارد. بسیاری از چارچوب های نرم افزاری مبتنی بر محیط های ابری مانند Hadoop [ 30 ]، Spark [ 31 ] و Storm [ 32 ] توسعه یافته اند. با توجه به محبوبیت و پایداری آن، یک خوشه Hadoop به عنوان محیط ابری پایه آزمایشی انتخاب شد. دین و قماوات [ 33] اولین بار MapReduce را معرفی کرد. این مدل از دو مرحله اصلی برای پردازش یک کار استفاده می کند. یکی فاز نقشه، که در آن یک جفت کلید/مقدار برای تولید مجموعهای از جفتهای کلید/مقدار میانی پردازش میشود، و دیگری فاز کاهشی است که در آن تمام مقادیر میانی مرتبط با همان کلید میانی پردازش میشوند. برخلاف تفسیر سنتی SM، مدل در این مقاله از طریق آزمایش برای بهبود عملکرد مدیریت SM تنظیم شده است. الگوریتم های شخص ثالث برای انجام وظایف خاص وب سرویس در اینجا وارد می شوند. با در نظر گرفتن سایر فناوریهای رایانش ابری، مانند Spark و Storm، چارچوب باید تنظیم شود، خوشه Hadoop باید با نتایج Spark یا Storm جایگزین شود، و فازهای نقشه/کاهش باید با flatmap/join یا spout/bolt جایگزین شوند. با در نظر گرفتن پلت فرم محاسبات ابری،2 [ 34 ] یا Windows Azure [ 35 ]، پیاده سازی باید بر روی پلت فرم محاسبات ابری مستقر شود در حالی که چارچوب بدون تغییر باقی می ماند. مرکز ذخیره سازی به یک زیرساخت پایگاه داده توزیع شده اشاره دارد. یک پایگاه داده توزیع شده سرعت پرس و جو سریعتر، مقیاس پذیری بالاتر و هزینه کمتری را برای ذخیره سازی و نیازهای پرس و جو حجم زیادی از EOD و مشاهدات عظیم فراهم می کند. پایگاه داده MongoDB قوی است. جیانگ یک سیستم ذخیرهسازی توزیعشده جدید و به آسانی در دسترس به نام MyStore بر اساس MongoDB خوشهای بهینهسازی شده برای دادههای بدون ساختار ارائه کرد [ 36 ].
لایه فیزیکی مجموعهای از حسگرها و دستگاههای انتقال درجا است که در خاک یا بین محصولات و حسگرهای روی ماهوارهها مستقر شدهاند. این سنسورها اندازه گیری های شرایط محیطی (به عنوان مثال، رطوبت هوا و SM) را از طریق سیگنال های الکترونیکی منتقل می کنند. سپس داده ها به طور منظم توسط سرویس دروازه بالا استخراج می شوند. بنابراین، لایه فیزیکی لایه اصلی است که سایر اجزای CESCI را پشتیبانی می کند. علاوه بر این، EOD یک منبع داده مهم است. این داده ها شامل داده های ماهواره ای نوری و داده های راداری است و توسط سنجش از دور غیرفعال یا سنجش از راه دور فعال ارائه می شود.
2.2. الگوریتم نقشه هسته/کاهش برای نگاشت تصاویر سنجش از دور
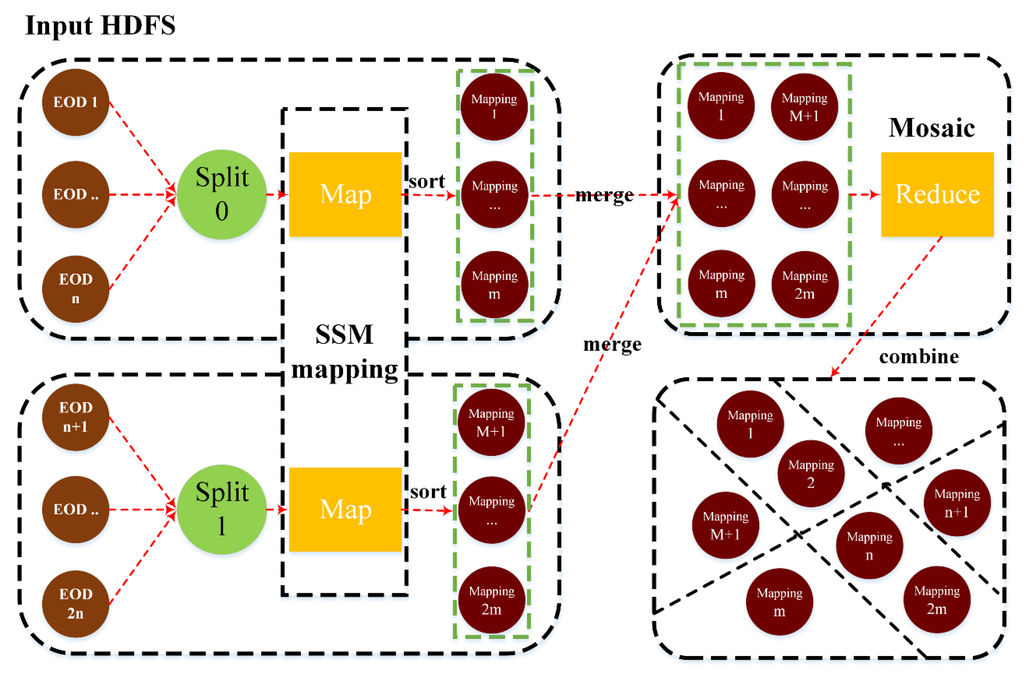
در فرآیند نگاشت تصاویر سنجش از دور، پردازش تصویر را می توان به صورت موازی انجام داد. مشابه Hadoop map/reduce workflow، گردش کار تعامل در محیط Hadoop به بخشهای نقشه و کاهش تقسیم میشود. برای انجام گردش کار، وب سرویس استاندارد OGC باید معرفی شود. یو و همکاران سرویس مشاهده حسگر (SOS) [ 37 ] و Google Fusion Table را برای دستیابی به مدیریت مشترک SM ترکیب کرد و مشاهداتی را انجام داد که میتوان آنها را در صورت تقاضا از طریق یک SOS مقیاسپذیر تجسم و تحلیل کرد [ 38 ]. OGC خدمات پردازش وب (WPS) را در سال 2007 منتشر کرد تا رابط های استاندارد شده ای را تعریف کند که انتشار، کشف و اتصال فرآیندهای مکانی توسط مشتریان را تسهیل می کند [39 ]]. چن و همکاران یک چارچوب WPS رایانش ابری را برای پردازش EOD پیشنهاد کرد [ 40 ].
شکل 2 نقشه/کاهش گردش کار برای EOD را نشان می دهد. گردش کار نمایش داده شده در شکل 3 روند پردازش EOD را به دو فرآیند فرعی تقسیم می کند: نقشه برداری و موزاییک. نقشه برداری به نگاشت تک تصویر بر اساس شاخص وارونگی SM اشاره دارد. فرآیند وارونگی SM را می توان در چندین ماشین مستقل موازی کرد. با این حال، نتایج وارونگی SM منفرد باید برای ایجاد یک نتیجه نقشه برداری SM کامل و در مقیاس بزرگ موزاییک شوند. ابزار عمومی مورد استفاده کتابخانه انتزاع داده های جغرافیایی (GDAL) [ 41 ] است. فرآیند نگاشت SM در مرحله نقشه و فرآیند موزاییک در مرحله کاهش تکمیل می شود. شاخص نقشه برداری SM می تواند شاخص خشکسالی عمودی، شاخص خشکسالی عمود اصلاح شده [ 42] باشد.]، شاخص گیاهی تفاوت نرمال شده (NDVI)، یا شاخص گیاهی تفاوت عادی شده سبز [ 43 ].
الگوریتم نقشه/کاهش برای نگاشت EOD در الگوریتم 1 نشان داده شده است. کل الگوریتم به چهار مرحله تقسیم می شود: پیکربندی، نقشه برداری، کاهش و اجرا. در الگوریتم، درخواست اجرا، اجرای نقشه/کاهش را برای درج مجموعههای EOD راهاندازی میکند. با استفاده از برنامه map/reduce، یک کار جدید ایجاد می شود. همانطور که در الگوریتم 1 نشان داده شده است، کار تابع doConfiguration ( مسیر HDFS ، IP Hadoop ، URL SOS ) را برای پیکربندی پارامترهای کار اجرا می کند. تابع نقشه توسط تابع setMap ( EOD tn , f SM ) پیاده سازی می شود. تابع کاهش از طریق setReduce ( STtn , f Mosaic ) تابع. اطلاعات InsertionOutput از طریق تابع setOutput ( InsertionOutput ) در فاز کاهشدر فایل خروجی نوشته می شودمراحل برنامه در الگوریتم 1 نشان داده شده است.
| الگوریتم 1 : جریان نقشه/الگوریتم کاهش برای نقشه برداری EOD |
ورودی : مشاهده EOD فعلی EOD tn خروجی : نتیجه درج ExecuteOutput نشان داده شده توسط JobStatus استفاده : WebProcessingService ( داده tn ورودی، الگوریتم ID EOD ، ResponseFormat ) شی دسترسی به داده را برای اجرای WPS doConfiguration ( مسیر HDFOS ، پیکربندی IPHDFS ) به ارث می برد. و IP Hadoop setMap ( EOD tn ، f SM ) تابع نقشه را در نقشه/کاهش فرآیند تنظیم می کند setReduce ( ST tn , f Mosaic ) پارامترهای پایگاه داده توزیع شده را تنظیم می کند setOutput ( InsertionOutput ) اطلاعات وضعیت InsertionOutput را تنظیم می کند مرحله 1: واسط اجباری پیاده سازی WPS EOD را با استفاده از تابع به ارث می برد. WebProcessingService ( داده tn ورودی، الگوریتم ID EOD ، ResponseFormat )، به عنوان مثال ، عملکرد لازم تعبیه شده در رابط InsertObservation را پیاده سازی کنید. WPS EODنشان دهنده وب سرویس استاندارد OGC است که برای پردازش EOD و تولید نقشه EOD استفاده می شود. مرحله 2: شروع به پیکربندی پارامترهای مسیر ورودی آدرس پروتکل اینترنت (IP) سیستم فایل توزیع شده Hadoop (HDFS) برای ورود به محیط خوشه Hadoop. با استفاده از پارامترهایی مانند IP و شماره پورت پیکربندی شده در بالا، یک کار جدید ایجاد کنید. HDFS لایه ذخیره سازی در سیستم فایل را نشان می دهد. مرحله 3: مجموعه اشیاء ST tn را از EOD tn با استفاده از تابع get4 ( EOD tn ) بدست آورید. اجرای تابع get4 ( EOD tn ) بر اساس استمدل کدگذاری مشاهده و اندازه گیری با کمک SOS EOD . SOS EOD نشان دهنده وب سرویس استاندارد OGC است که برای دسترسی به EOD استفاده می شود. مرحله 4: تابع نقشه setMap ( EOD tn , f SM ) را پیاده سازی کنید و از طریق تابع f SM به نقشه برداری EOD tn SM دست یابید . الگوریتم تجزیه f SM در اینجا فراخوانی می شود. پس از پیش پردازش داده ها، از جمله تصحیح هندسه و تصحیح تشعشع، EOD tnمی توان از طریق مدل محاسباتی SM نقشه برداری کرد. مدل محاسباتی SM مشخص شده در اینجا ارجاع داده شده است. با فراخوانی رابط برنامه کاربردی (API) ArcGIS و ابزارهای Environment for Visualizing Images (ENVI)، نقشه برداری SM را می توان انجام داد. ArcGIS و ENVI حاوی API خاصی هستند که برای پردازش EOD و به دست آوردن نتیجه نگاشت SM لازم است. مرحله 5: نقشه های SM منطقه ای و جزئی را در یک نقشه SM در مقیاس بزرگ از طریق رابط ENVI IDL با استفاده از تابع setReduce ( ST tn , f Mosaic ) ترکیب کنید. تابع f Mosaic به فرآیند موزاییک کردن تصویر اشاره دارد. اطلاعات وضعیت InsertionOutput نشان داده شده توسط JobStatus آخرین بار با استفاده ازتابع setOutput ( InsertionOutput ). علاوه بر این، نتیجه آماری از طریق رابط درج داده SOS و آدرس وب SOS در پایگاه داده MongoDB درج خواهد شد. |
2.3. الگوریتم نقشه هسته/کاهش برای حسگرهای درجا
در مانیتورینگ SM، حسگرهای درجا متنوع و متفاوت از یکدیگر هستند. این ویژگی ها آنها را برای ارائه مشاهدات بدون درز SM ضروری می کند. با افزایش تعداد حسگرها و فرکانس مشاهده، مقدار داده های مشاهده بسیار زیاد می شود و انجام تجزیه و تحلیل های آماری در حین پرواز را دشوار می کند. شکل 3 روند کار نقشه/کاهش را برای حسگرهای درجا در چارچوب پیشنهادی نشان میدهد. گردش کار، درجا را تقسیم می کندمجموعه دادههای مشاهدهای حسگرها در دو فرآیند فرعی: محاسبات آماری جزئی و محاسبات تحلیل کلی. محاسبات آماری جزئی در مرحله نقشه تکمیل می شود و محاسبات تحلیل کلی در فاز کاهش در گردش کار نقشه/کاهش کامل می شود.
در الگوریتم، درخواست Execute اجرای نقشه/کاهش را برای درج مجموعه دادههای مشاهدهای حسگرهای درجا آغاز میکند. با استفاده از برنامه map/reduce، یک کار جدید ایجاد می شود. همانطور که در الگوریتم 2 نشان داده شده است، کار تابع doConfiguraion ( مسیر HDFS ، IP Hadoop ، URL SOS ) را برای پیکربندی پارامترهای کار اجرا می کند. تابع نقشه توسط تابع setMap ( In-situObservation tn , f partal-statistic ) پیاده سازی می شود. تابع کاهش از طریق setReduce اجرا میشود ( ST tn ، f آمار کلی) تابع. اطلاعات InsertionOutput نیز از طریق تابع setOutput ( InsertOutput ) در فاز کاهش در فایل خروجی نوشته می شود. برای بررسی مختصر اصول و اجزای فرآیند Hadoop، طراحی الگوریتم نقشه/کاهش برای یک حسگر درجا در الگوریتم 2 توضیح داده شده است.
| الگوریتم 2. جریان الگوریتم نقشه/کاهش برای یک تحلیل آماری مبتنی بر حسگر درجا |
ورودی : مشاهده حسگر درجا فعلی درجا مشاهده tn خروجی : نتیجه درج ExecuteOutput نشان داده شده توسط JobStatus استفاده : WebProcessingService ( داده tn ورودی، الگوریتم ID درجا ، ResponseForm ) شی دسترسی به داده را برای پیاده سازی WPS به ارث می برد ( , Hddffs , PaCthonfigurop , PaCthonfigur ) URL SOS ) مسیر HDFS و IP Hadoop setMap را پیکربندی میکند ( In-situObservationtn , f partal-statistic ) تابع نقشه را در نقشه/کاهش فرآیند تنظیم می کند setReduce ( آمار tn , f کلی آمار ) پارامترهای پایگاه داده توزیع شده را تنظیم می کند setOutput ( InsertionOutput ) اطلاعات وضعیت InsertionOutput را تنظیم می کند مرحله 1: به ارث بردن اجباری رابط پیاده سازی درجا WPS با استفاده از تابع WebProcessingService ( داده tn ورودی، الگوریتم ID درجا ، ResponseForm) که شامل اجرای تابع ضروری تعبیه شده در رابط InsertObservation است. WPS in-situ نشان دهنده وب سرویس استاندارد OGC است که برای پردازش مشاهدات حسگر درجا استفاده می شود . مرحله 2: شروع به پیکربندی پارامترهای مسیر ورودی آدرس پروتکل اینترنت HDFS برای ورود به محیط خوشه Hadoop کنید. با استفاده از پارامترهایی مانند IP و شماره پورت، همانطور که در بالا پیکربندی شده است، یک کار جدید ایجاد کنید. مرحله 3: مجموعه های مشاهده حسگر درجا را به صورت خودکار از طریق رابط درج داده SOS در آدرس SOS قرار دهید . مجموعههای مشاهده با مدل کدگذاری مشاهده و اندازهگیری کدگذاری میشوند . در محلمشاهدات حسگر را می توان در MongoDB در این مرحله قرار داد. SOS نشان دهنده سرویس وب استاندارد OGC است که برای دسترسی به مشاهدات حسگر درجا استفاده می شود . مرحله 4: مجموعه اشیاء ST tn را از EOD tn با استفاده از تابع get4 ( In-situObservation tn ) با کمک SOS به دست آورید. تابع get4 ( In-situObservation tn ) بر اساس مدل کدگذاری مشاهده و اندازهگیری پیادهسازی شده است . محدوده مکانی و زمانی را می توان به طور خاص در مراحل زیر تنظیم کرد. مرحله 5: تابع نقشه setMap را پیاده سازی کنید( درجا tn ، f آمار جزئی )، که آمار tn مشاهده درجا را از طریق تابع آمار جزئی f با WPS به دست میدهد. الگوریتم آماری f partial-statistic در اینجا برای محاسبه نتیجه آمار جزئی فراخوانی می شود. الگوریتم آماری f partal-statistic در جاوا یا سی شارپ پیاده سازی شده است. آمار جزئی به آمار مجموعه داده های مشاهداتی حسگر درجا اشاره دارد . مرحله 6: نتیجه آمار جزئی و نتیجه آماری کلی را با استفاده از تابع setReduce ( statistic tn) ترکیب کنید، f آمار کلی ). ST tn پارامترهای مکانی-زمانی را در f آمار کلی نشان میدهد ، که تابعی است که برای تولید نتیجه کلی همه مجموعههای مشاهدات مبتنی بر حسگر درجا استفاده میشود. الگوریتم تجزیه و تحلیل f overall-statistic در جاوا یا سی شارپ توسعه داده شده است. اطلاعات وضعیت InsertionOutput نشاندادهشده توسط JobStatus آخرین بار با تابع setOutput ( InsertionOutput ) تولید میشود . آمار کلی به آمار کلی مجموعه داده های مشاهداتی حسگر درجا اشاره دارد . |
2.4. جریان عملیات وب سرویس در مانیتورینگ SM
مدیریت SM در PA را می توان به دو الگو تقسیم کرد: EOD و حسگرهای درجا . سرور آزمایشی CESCI از چندین سرور WPS و یک سرور SOS تشکیل شده است. سرورهای WPS از WPS 52 درجه شمالی پیادهسازی شدهاند، با برخی پیشرفتها، یعنی افزودن پردازش Hadoop برای محاسبات SM و یک تابع آماری دادههای درجا . پایگاه داده پیش فرض 52° North SOS پایگاه داده PostgreSQL است. بنابراین، کلاس مشاهده داده ها باید بهبود یابد و از MongoDB پشتیبانی کند.
جریان عملیات وب سرویس در شکل 4 نشان داده شده است . در PA، استقرار حسگرهای کشاورزی برای به دست آوردن مشاهدات مداوم و در زمان واقعی محصولات بسیار مهم است. مدیریت SM برای دستیابی به تجزیه و تحلیل آماری در حال پرواز در محل طراحی شده استمشاهدات حسگر SOS می تواند داده ها را به صورت باز با استفاده از رابط InsertObservation منتشر کند. بنابراین، مشتریان در وب می توانند به داده های کشاورزی اندازه گیری شده در زمین های کشاورزی نظارت شده با استفاده از این SOS دسترسی داشته باشند. ابتدا، مشتری CESCI درخواست GetCapabilities را برای درخواست فرآیندهای قابل استفاده و مناسب در سمت سرور ارائه می دهد. سپس مشتری پارامترهای اختیاری و اجباری مورد نیاز فرآیند را از طریق رابط DescribeProcess بدست می آورد. سپس عملیات Execute برای اجرای این فرآیند فراخوانی می شود. سپس JobTracker برای ارسال کار به Hadoop NameNode فعال می شود. کار شامل شناسه، نام، شناسه فرآیند، پارامترهای ورودی و پارامترهای خروجی است. با فراخوانی الگوریتم مناسب برای سنسورهای راه دور یا درجاسنسورها، سیستم نتیجه نقشه برداری SM یا نتایج آماری مشاهدات حسگر درجا در محیط Hadoop را تولید می کند. در فاز نقشه/کاهش، فرآیند نوشتن در NameNode و DataNode تکرار خواهد شد. ارسال کننده داده نتایج نقشه برداری EOD یا نتایج تحلیل مشاهدات حسگر درجا را در Hadoop HDFS می نویسد. فرآیند نقشه برداری و موزاییک SM در این مرحله تکمیل می شود. سپس، نتیجه از طریق رابط درج داده در SOS درج می شود. در نهایت، کل کار خاتمه می یابد.
3. آزمایشات
3.1. محیط تجربی
قبل از آزمایش، محیط توزیع ایجاد می شود. ما از چارچوب Hadoop بر اساس روش توزیع کامل استفاده می کنیم. این چارچوب از پنج کامپیوتر و یک هاب سوئیچینگ استفاده می کند و از یک گره نام و چهار گره داده تشکیل شده است. همان سیستم عامل (CentOS 7.0) و نسخه Hadoop 2.6.0 روی هر گره نصب شده است. پیکربندی هر گره i3 2100 (3.1 گیگاهرتز) با 8 گیگابایت رم است. خوشه از همان سخت افزاری استفاده می کند که در چارچوب Hadoop استفاده می شود. در محیط Hadoop چهار گره داده و یک گره نام وجود دارد. خوشه Hadoop بر روی پنج کامپیوتر، از جمله یک گره اصلی و چهار گره برده، مستقر شده است.
3.2. در زمینه سنجش از دور: دادههای رصد زمین شاخص گیاهی (VI) نقشهبرداری
در زمینه سنجش از دور، منطقه مورد مطالعه انتخاب شده استان هوبی است. تصاویر میدان دید گسترده GF-1 (WFV) 1A یکی از محصولات ماهواره GF-1 است که اخیراً توسط چین در سال 2013 پرتاب شد. مدیریت چنین حجم زیادی از داده ها از سراسر استان هوبی دشوار و زمان بر است. بنابراین، روش پیشنهادی CESCI را می توان در اینجا اعمال کرد.
اگرچه VI یک شاخص صریح SM در اکثر موارد سنجش از دور نیست، VI به طور کلی می تواند توزیع SM را نشان دهد [ 44 ]. همانطور که مک نالی بیان کرد، NDVI بهترین حدس از پیش بینی رطوبت خاک را ارائه می دهد. NDVI و سایر شاخصهای پوشش گیاهی سنجش از دور میتوانند برای هشدار اولیه برای خطرات طبیعی مانند خشکسالی و سیل که با ناامنی غذایی مرتبط هستند، استفاده شوند. در آزمایش نقشه برداری VI، منابع داده اصلی تصاویر GF-1 WFV 1A هستند. برای نظارت بر رشد پوشش گیاهی، VI باید برای درک پوشش گیاهی محاسبه شود. پوشش گیاهی در VI همیشه دارای مقادیر مثبت است، در حالی که برف و آب مقادیر منفی تولید می کنند. بنابراین، محاسبات VI برای درک عملکرد محصول مهم هستند [ 45]. در میان VIهای ممکن، پرکاربردترین VI، NDVI است. یاگچی و همکاران اثر تناوب زراعی بین ذرت و سویا را بر دقت پایش خشکسالی کشاورزی مبتنی بر NDVI در آیووا، ایالات متحده آمریکا ارزیابی کرد [ 46 ]. سنجش از دور ماهواره ای به یک رویکرد محبوب برای تجزیه و تحلیل خشکسالی های کشاورزی بر اساس شرایط سلامت پوشش گیاهی زمینی با استفاده از NDVI تبدیل شده است. فرمول NDVI به شرح زیر است.
نDVمن=ρنمنآر–ρآرρنمنآر+ρآر
با این حال، فرمول اول در مطالعه استفاده می شود. فرآیند موزاییک را می توان در مرحله کاهش فرآیند نقشه/کاهش به دست آورد. از GDAL می توان در اجرای موزاییک استفاده کرد. نقشه های مختلف که مناطق مختلف فضایی را پوشش می دهند در یک نقشه ترکیب می شوند که کل منطقه مورد مطالعه را پوشش می دهد. این روش را می توان با کاهش پیاده سازی موازی کرد. شکل 5فرآیند MapReduce مورد استفاده برای نقشه برداری NDVI در استان هوبی را نشان می دهد. اول، EOD ها از نظر هندسی و رادیومتری کالیبره می شوند. سپس، بخش نقشه از فرآیند نقشه/کاهش انجام می شود. EOD پیش شرطی منفرد در نقشه برداری NDVI از طریق رابط برنامه (API) ENVI/IDL استفاده می شود. در بخش کاهش فرآیند نقشه/کاهش، نقشه های تک NDVI موزاییک می شوند تا از طریق API GDAL به یک نقشه NDVI کامل دست یابند. توابع setMap()، setReduce()، setOutput() و WebProcessingService() همانطور که در شکل 5 نشان داده شده است تعریف شده اند . در تابع setMap() مسیر HDFS، IP و تابع نقشه برداری NDVI تنظیم شده است. در تابع setReduce() تابع mosaic تنظیم شده است. در تابع WebProcessingService() تابع نقشه برداری NDVI و تابع mosaic پیاده سازی شده اند.
از طریق CESCI، EOD می تواند به طور موثر و کارآمد برای نقشه برداری SM استفاده شود. شکل 6 آزمایش عملکرد خاص را نشان می دهد. زمان مصرف مرتبط با نگاشت NDVI با استفاده از پیاده سازی WPS با یک گره واحد بر اساس 128 گیگابایت و 154 گیگابایت، به ترتیب 41.2 دقیقه و 46.2 دقیقه است. زمان مصرف CESCI با پنج گره به ترتیب 11.8 دقیقه و 13.4 دقیقه با استفاده از 128 گیگابایت و 154 گیگابایت است. بنابراین، بازده CESCI دو برابر بیشتر از WPS با یک گره است.
3.3. در زمینه حسگرهای درجا: تجزیه و تحلیل نزدیک به زمان واقعی
در زمینه حسگرهای درجا ، شهر Baoxie، که در یک منطقه روستایی معمولی در نزدیکی شهر ووهان در استان هوبی، چین واقع شده است، به عنوان مطالعه موردی انتخاب شده است. شکل 7 منطقه علمی، آزمایشی را نشان می دهد و تاریخ آزمایش 26 مه 2015 است. تقریباً 30 حسگر مرتبط با کشاورزی در یک ایستگاه خودکار در یک میدان علمی تجربی 20 متر × 40 متر مستقر شده اند (موقعیت مرکزی در 114 درجه و 31). ‘35.61″ شرقی، 30°28’12.98″ شمالی) واقع در شهر بائوکسی، چین. سنسورهای SM در سطوح افقی مختلف در سه عمق مختلف (10 سانتی متر، 30 سانتی متر و 40 سانتی متر) مستقر می شوند. سنسورهای هواشناسی و SM مورد استفاده در این زمینه کشاورزی توسط بستر مدیریت خدمات مشترک وب سنسور جغرافیایی [ 47] مدیریت و نگهداری می شوند.]، که به کاربران امکان می دهد اندازه گیری های مربوط به کشاورزی را در زمان واقعی و تاریخی بازیابی کنند و SM را در میدان نقشه برداری کنند.
همانطور که در شکل 7 نشان داده شده است، ایستگاه اتوماتیک دو ایستگاه هواشناسی و یک ایستگاه اندازه گیری خاک را ادغام می کند. سنسورهای SM در ایستگاه اندازه گیری خاک استفاده می شوند. با استفاده از GPRS و سایر دستگاههای سختافزاری، مشاهدات بلادرنگ به بستر مدیریت خدمات مشترک سنسور وب منتقل میشوند.
در PA، مشاهدات حسگر هواشناسی می تواند بدون درز و بدون وقفه باشد. با این حال، تجزیه و تحلیل آماری مشاهدات به موقع چالش برانگیز است. تجزیه و تحلیل آماری داده های جغرافیایی ضروری و معنادار است. بهبود به موقع بودن مرتبط با درک تکامل و تغییرات مزرعه، که حاوی اطلاعات فراوان است، چالش برانگیز است. به طور خلاصه، ادغام فناوری محاسبات ابری و PA ممکن و ضروری است. با استفاده از فناوری محاسبات ابری، به موقع بودن تجزیه و تحلیل PA بهبود می یابد. تجزیه و تحلیل PA شامل محاسبه مقدار شدید، انتخاب مقدار غیر طبیعی و محاسبه مقدار میانگین است. پس از تجزیه و تحلیل نتایج این مطالعه، به نتایج زیر رسیدیم که در جدول 1 آمده است .
حداکثر مقدار حداکثر مقدار در مشاهدات درجا ، مقدار min حداقل مقدار، مقدار میانگین مقدار میانگین است، و اغلب مقدار ظاهر شده، مقداری است که بالاترین میزان وقوع را دارد. با تغییر در طول زمان، کمیت کردن و تعیین مقدار دشوار است. با در نظر گرفتن محاسبه ارزش به عنوان مثال، بخش نقشه به حداکثر مقدار محاسبه شده توسط گردش در یک بلوک داده منفرد و بخش کاهش به حداکثر مقدار محاسبه شده توسط گردش در یک بلوک داده حداکثر اشاره دارد. بخش نقشه و بخش کاهش می توانند حداکثر مقدار همه مشاهدات درجا را تعیین کنند .
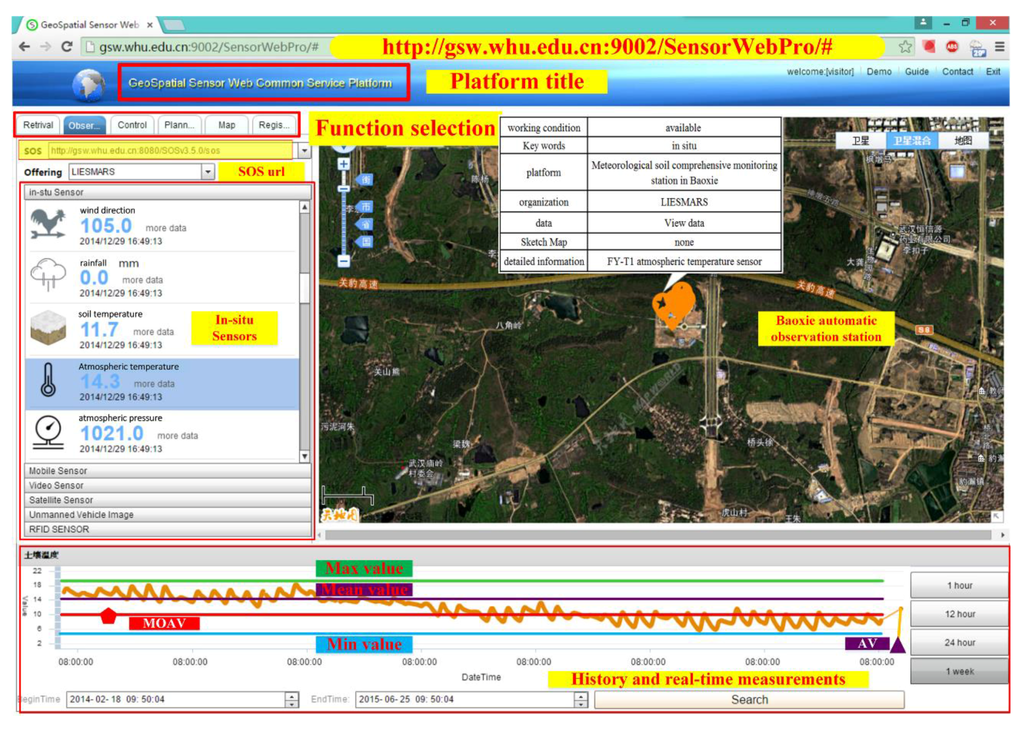
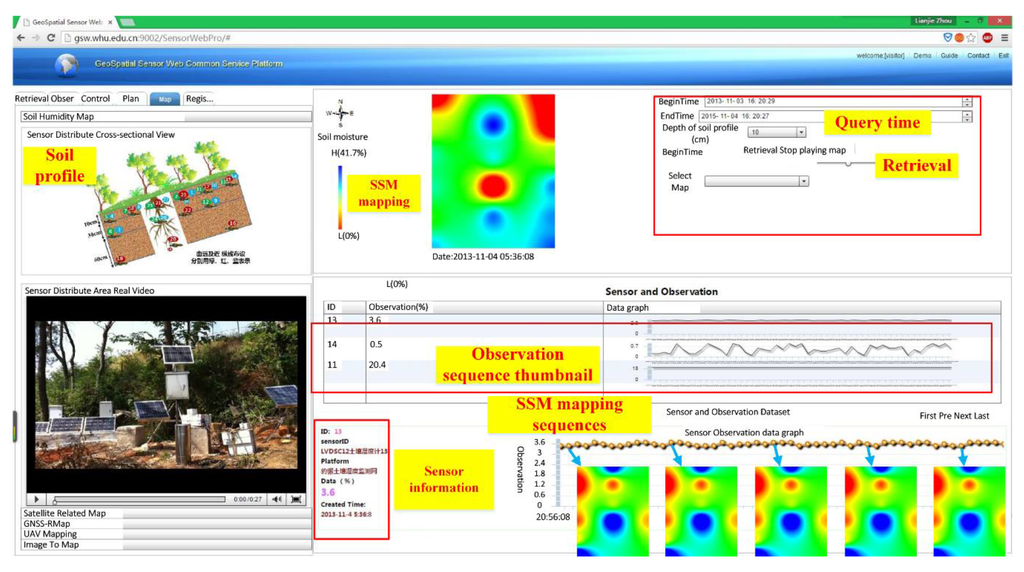
شکل 8 صفحه اصلی بستر خدمات مشترک وب سنسور جغرافیایی و تجسم مشاهدات SM و هواشناسی بر اساس CESCI را نشان می دهد. مقادیر منحنی SM به شکل جدول در پایین پنجره ثبت می شود. با فراخوانی رابط SOS، داده های ذخیره شده در SOS در پنل سمت چپ نمایش داده می شود. پانل سمت چپ سنسورهای SM و هواشناسی استفاده شده در CI را نشان می دهد. مرکز شکل 8 یک نمای نقشه است که موقعیت زمین شناسی سنسور انتخاب شده را در پانل سمت چپ نمایش می دهد. مقادیر حداکثر، مقادیر میانگین، مقادیر حداقل، رایج ترین مقادیر و مقادیر غیرعادی از طریق الگوریتم نقشه/کاهش شرح داده شده در الگوریتم 1 محاسبه می شوند.
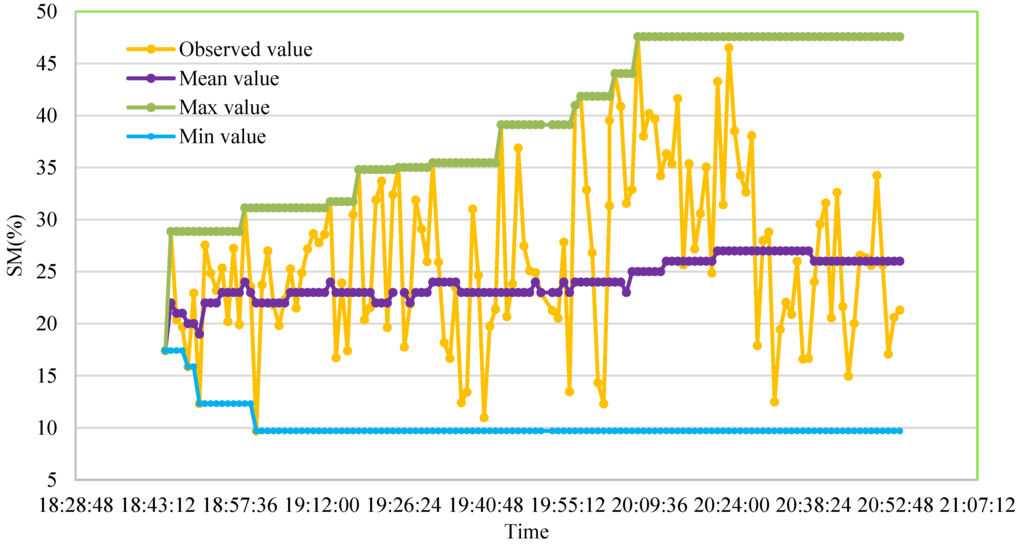
شکل 9 مقدار مشاهده شده، حداکثر مقدار، مقدار حداقل و مقدار میانگین را در نزدیکی منحنی های زمان واقعی از 18:44:33 تا 20:53:33 در 1 دسامبر 2015 نشان می دهد. منحنی زرد منحنی مقدار مشاهده شده است. منحنی بنفش مقدار میانگین است. منحنی سبز مقدار حداکثر است. منحنی آبی مقدار min است. حداکثر مقدار، مقدار حداقل، مقدار متوسط و MOAV را می توان بر اساس اجرای الگوریتم در بخش 2.3 تقریباً در زمان واقعی نمایش داد . نظارت SM را می توان در زمان واقعی انجام داد. در PA، نظارت نزدیک به زمان واقعی ضروری و ضروری است.
نظارت بر شرایط SM در منطقه آزمایشی علمی امکان تشخیص رطوبت منطقه مورد مطالعه را فراهم می کند. برای دستیابی به نقشه برداری SM در زمان واقعی، الگوریتم پیشنهاد شده در بخش 2.2قابل بکارگیری است. فاز نقشه و فاز کاهشی با فرآیندهای آماری و تحلیلی مطابقت دارد. SM در حوزه تجربی علمی را می توان با درون یابی SM تعیین کرد. فرآیند درون یابی را می توان به بخش نقشه و بخش کاهش داد. شرایط SM بلوک ها را می توان بر اساس مقادیر SM در چهار راس اطراف درون یابی کرد. فرآیند نقشه با درونیابی واحد مطابقت دارد. بخش کاهش مربوط به فرآیند درون یابی مشترک است. درونیابی وزنی با فاصله معکوس (IDWI)، یکی از متداولترین روشهای درونیابی فضایی، نسبتا راحت است، معمولاً برای محاسبات استفاده میشود و درک آن آسان است [ 48 ]. مقدار همسایگی یک نقطه نمونه از طریق مدل IDWI [ 49 ] محاسبه می شود. شکل 10یک نقشه SM در حال پرواز را بر اساس الگوریتم در بخش 2.2 نشان می دهد . به این ترتیب، درون یابی به موقع است. با استفاده از روش درونیابی IDWI، می توان یک نقشه SM ایجاد کرد تا فوراً کل منطقه آزمایشی را پوشش دهد. هنگام انتخاب محدوده زمانی، نقشه های SM مورد نیاز برای تشکیل یک دنباله نقشه برداری SM برگردانده می شوند.
شکل 11 مصرف زمان مرتبط با درون یابی تعداد مختلف نقاط درون یابی را در روش های مختلف نشان می دهد. زمان مصرف پیاده سازی IDWI WPS با یک گره برای 1080 و 840 نقطه به ترتیب 89.2 ثانیه و 72.1 ثانیه است. زمان مصرف CESCI با پنج گره به ترتیب 45.8 ثانیه و 35.8 ثانیه برای 1080 و 840 نقطه است. از این رو، کارایی CESCI بالاتر از WPS با یک گره است. نمایش زمان واقعی مطلق دشوار است. با این حال، درون یابی SM و محاسبات حداکثر مقدار، حداقل مقدار و مقدار میانگین با استفاده از CESCI بسیار افزایش یافته است. بنابراین، حسگرهای درجا و درون یابی مبتنی بر CESCI می توانند به طور موثری تقریباً به زمان واقعی برسند.
4. بحث
4.1. الگوریتم واجد شرایط برای نظارت PA بر اساس سنجش از راه دور و حسگرهای درجا
از آنجایی که تقریباً هیچ تلاشی برای معرفی محاسبات ابری در PA انجام نشده است، ما سعی میکنیم ترکیب مناسبی را برای پیشنهاد یک الگوریتم نظارت واجد شرایط برای نظارت مؤثر بر شرایط SM ایجاد کنیم، همانطور که در بخش 2.2 و بخش 2.3 . اجرا در بخش 3.2 و بخش 3.3 به دست آمده است . در بخش 3.2 ، مصرف زمانی نقشه برداری NDVI توسط CESCI کاهش یافته است. مشاهدات حسگر درجا تقریباً در زمان واقعی در بخش 3.3 تجزیه و تحلیل شد . حداکثر مقدار، مقدار حداقل، مقدار میانگین، و MOAV را می توان به دست آورد، و درون یابی SM را می توان در زمان واقعی نزدیک به دست آورد. جدول 2مقایسه CESCI با سایر CI ها و روش ها را نشان می دهد. همانطور که در جدول 2 نشان داده شده است دو مشکل در مانیتورینگ PA وجود دارد : (1) دشواری مرتبط با پشتیبانی کارآمد از پردازش EOD برای درک شرایط SM در مقیاس بزرگ به دلیل توانایی محاسباتی محدود. و (2) ناتوانی در انجام آنالیزهای نزدیک به زمان واقعی مشاهدات حسگر درجا در زمینه شرایط SM. با این حال، قابلیت محاسباتی نقشه برداری SM تقریباً 1.4 دقیقه در استان هوبی با استفاده از پنج گره محاسباتی با CESCI است. تجزیه و تحلیل مشاهدات درجا در زمان واقعی در بخش 3.3 ارائه شده است. معماری سرویس گرا (SOA) معماری کلاسیکی است که در توسعه CI استفاده می شود. در مقایسه با سایر CI ها و روش ها، CESCI دارای SOA فعال است. در نتیجه، نظارت PA با CESCI موثر است.
4.2. راه حل با کارایی بالا برای مانیتورینگ PA
روش پیشنهادی را می توان برای نظارت PA، از جمله افزایش قابلیت نقشه برداری SM و انجام تجزیه و تحلیل مشاهده نزدیک به زمان واقعی، همانطور که در آزمایش ها انجام شد، اعمال کرد. CESCI چالش ادغام رابطها و قابلیتهای مختلف را با ترکیب فناوری سنجش از راه دور، زیرساختهای فیزیکی سایبری و فناوری محاسباتی با کارایی بالا برطرف میکند. برای نقشه برداری SM، CESCI به بهبود عملکرد دست یافته است، همانطور که در بخش 3.2 نشان داده شده است . با گره های محاسباتی بیشتر، عملکرد افزایش می یابد. هنگام برخورد با تصاویر 154 گیگابایتی GF-1، عملکرد روش پنج گره بالاترین است. برای حسگرهای درجا ، CESCI تلاش میکند تا به تحلیل زمان واقعی مشاهدات بدون وقفه در بخش 3.3 دست یابد.. حداکثر مقدار SM، حداقل مقدار SM و محاسبات مقدار میانگین را می توان در زمان واقعی انجام داد، و عملکرد درونیابی نقشه برداری SM در سایت آزمایشی با CESCI بهبود یافت. بر این اساس، نظارت PA با CESCI یک رویکرد کارآمد است.
5. نتیجه گیری و کار آینده
محاسبات ابری به دلیل مزیت منحصربهفرد مرتبط با پردازش دادهها، مانند پردازش تصویر سنجش از راه دور و درونیابی مشاهدات درجا ، نقش مهمی در ساخت پلت فرم نظارت PA ایفا میکند. بنابراین، استفاده از فناوری مدرن برای بهبود عملکرد نظارت در PA ضروری است، همانطور که در آزمایشهای بالا انجام شد. این مطالعه چارچوب CESCI را برای ارائه یک زیرساخت فیزیکی-سایبری کارآمد که نظارت کارآمد PA را امکانپذیر میسازد، پیشنهاد میکند. در زمینه سنجش از دور، عملکرد نقشه برداری SM با استفاده از الگوریتم نقشه/کاهش افزایش می یابد. در زمینه در محلحسگرها، الگوریتم نقشه/کاهش برای نقشهبرداری مشاهدات رطوبت مبتنی بر حسگر اعمال میشود و مقادیر حداکثر/دقیقه و مقادیر غیرعادی را تقریباً در زمان واقعی محاسبه میکند. علاوه بر این، درون یابی SM در زمان واقعی با الگوریتم نقشه/کاهش انجام شد. با افزایش قابلیت نظارت، هزینه نظارت PA کاهش می یابد و بهره وری و درآمد کشاورزان افزایش می یابد. در آینده، توابع معنیدارتری برای انجام دادهکاوی عمیقتر توسعه داده میشوند و سایر چارچوبهای محاسبات ابری، مانند Spark [ 31 ] و Storm [ 32 ] تجزیه و تحلیل خواهند شد.
قدردانی ها
این کار توسط کمک های مالی از برنامه ملی تحقیق و توسعه فناوری عالی چین (برنامه 863) (شماره 2013AA01A608)، برنامه بنیاد ملی علوم طبیعت چین (NSFC) (شماره 41301441)، صندوق های تحقیقات بنیادی برای دانشگاه های مرکزی (شماره 2042014kf0200)، و پروژه حمایت شده از بنیاد علوم پسا دکتری چین (شماره های 2014M562050 و 2015T80829). ما از مرکز چینی برای داده های ماهواره ای منابع و برنامه های کاربردی برای ارائه داده های GF-1 WFV و Apache™ Hadoop برای ارائه نرم افزار Hadoop 2.6.0 تشکر می کنیم.
اختصارات
در این نسخه از اختصارات زیر استفاده شده است:
| PA | کشاورزی دقیق |
| اس ام | رطوبت خاک |
| EOD | داده های رصد زمین |
| OGC | کنسرسیوم فضایی باز |
| CI | زیرساخت سایبری |
| CESCI | زیرساخت فضایی-زمانی سایبری-فیزیکی مجهز به محاسبات ابری |
| SOS | سرویس مشاهده سنسور |
| WPS | خدمات پردازش وب |
| GDAL | کتابخانه انتزاع داده های جغرافیایی |
| NDVI | شاخص گیاهی تفاوت عادی شده |
| WFV | میدان دید وسیع |
| VI | شاخص های پوشش گیاهی |
| API | رابط برنامه |
| SOA | معماری سرویس گرا |
منابع
- ژانگ، ن. وانگ، ام. وانگ، N. کشاورزی دقیق – یک مرور کلی در سراسر جهان. محاسبه کنید. الکترون. کشاورزی 2002 ، 36 ، 113-132. [ Google Scholar ] [ CrossRef ]
- یوفنگ، جی. توماسسون، جی. Sui, R. سنجش از دور خواص خاک در کشاورزی دقیق: بررسی. جلو. علوم زمین 2011 ، 5 ، 229-238. [ Google Scholar ]
- شلبرگ، جی. هیل، ام جی. گرهاردز، آر. روتموند، ام. براون، ام. کشاورزی دقیق در علفزار: کاربردها، دیدگاه ها و محدودیت ها. یورو جی. آگرون. 2008 ، 29 ، 59-71. [ Google Scholar ] [ CrossRef ]
- سیدوروا، ویرجینیا؛ ژوکوفسکی، EE; Lekomtsev، PV؛ Yakushev، VV تجزیه و تحلیل زمین آماری پارامترهای خاک و محصول در یک آزمایش مزرعه ای در کشاورزی دقیق. علم خاک اوراسیا 2012 ، 45 ، 783-792. [ Google Scholar ] [ CrossRef ]
- سیلوا، CB; مورائس، MAFDD؛ مولین، JP پذیرش و استفاده از فناوریهای کشاورزی دقیق در صنعت نیشکر ایالت سائوپائولو، برزیل. دقیق کشاورزی 2011 ، 12 ، 67-81. [ Google Scholar ] [ CrossRef ]
- بروکا، ال. ملون، اف. مورامارکو، تی. Morbidelli، R. پایداری زمانی رطوبت خاک در مناطق آزمایشی در مرکز ایتالیا. ژئودرما 2009 ، 148 ، 364-374. [ Google Scholar ] [ CrossRef ]
- Legates, DR; محمود، ر. Levia، DF; DeLiberty، TL; کویرینگ، اس ام. هاوسر، سی. نلسون، FE رطوبت خاک: موضوعی مرکزی و متحد کننده در جغرافیای فیزیکی. Prog. فیزیک جئوگ. 2011 ، 35 ، 65-86. [ Google Scholar ] [ CrossRef ]
- چو، ای. چوی، ام. واگنر، دبلیو. ارزیابی رطوبت خاک سطح و ناحیه ریشه از راه دور از طریق حسگرهای فعال و غیرفعال در شمال شرق آسیا. سنسور از راه دور محیط. 2015 ، 160 ، 166-179. [ Google Scholar ] [ CrossRef ]
- انتخابی، د. رودریگز-ایتوربه، آی. کاستلی، ف. برهمکنش متقابل وضعیت رطوبت خاک و فرآیندهای اتمسفر. جی هیدرول. 1996 ، 184 ، 3-17. [ Google Scholar ] [ CrossRef ]
- فین، نماینده مجلس؛ لوئیس، MD; بوش، دی دی؛ ژیرالدو، ام. یاماموتو، ک. سالیوان، دی جی؛ کینکید، آر. لونا، آر. علام، ج.ک. کوین، سی. و همکاران سنجش از دور رطوبت خاک با استفاده از داده های ابرطیفی هوابرد. GISci. Remote Sens. 2011 , 48 , 522-540. [ Google Scholar ] [ CrossRef ]
- آکینو سانتوس، آر. گونزالس-پوتس، آ. ادواردز بلوک، آ. Virgen-Ortiz، RA در حال توسعه یک پلت فرم جدید شبکه حسگر بی سیم و کاربرد آن در کشاورزی دقیق. Sensors 2011 , 11 , 1192-1211. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- سربینوفسکا، م. گاوروفسکی، سی. بروزان، وی. دیمچف، وی. Krkoleva، A. نظارت بر پارامترهای محیطی در کشاورزی دقیق با استفاده از شبکه های حسگر بی سیم. جی. پاک. تولید 2015 ، 88 ، 297-307. [ Google Scholar ] [ CrossRef ]
- لاوش، آ. زکریا، س. دیرک، سی. مکث، م. کوهن، آی. دکتر، دی. تجزیه و تحلیل پوشش گیاهی و الگوهای خاک با استفاده از سنجش از دور فراطیفی، EMI، و اشعه گاما اندازه گیری. Vadose Zone J. 2013 ، 12 ، 108-112. [ Google Scholar ] [ CrossRef ]
- گولی، ال. هوانگ، جی. پیج، دی. Triantafilis, J. نقشه برداری دیجیتالی خاک از محتوای آب موجود با استفاده از داده های پروگزیمال و سنجش از دور. مدیریت استفاده از خاک 2013 ، 30 ، 139-151. [ Google Scholar ] [ CrossRef ]
- هائو، سی. ژانگ، جی. Yao, F. ترکیبی از داده های سنجش از راه دور چند حسگر برای پایش خشکسالی در جنوب غربی چین. بین المللی J. Appl. زمین Obs. 2015 ، 35 ، 270-283. [ Google Scholar ] [ CrossRef ]
- بوتس، ام. پرسیوال، جی. رید، سی. Davidson, J. OGC Sensor Web Enablement: Overview and High Level Architecture . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2008. [ Google Scholar ]
- برورینگ، آ. اکترهوف، جی. جیرکا، س. سیمونیس، آی. اوردینگ، تی. استاش، سی. لیانگ، اس. Lemmens, R. فعال سازی وب سنسور نسل جدید. Sensors 2011 , 11 , 2652-2699. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- استوارت، کالیفرنیا؛ سیمز، اس. پله، بی. لینک، م. هنکاک، دی. فاکس، جی سی زیرساخت سایبری چیست؟ در مجموعه مقالات سی و هشتمین کنفرانس پاییز سالانه ACM SIGUCCS: ناوبری و کشف، نورفولک، VI، ایالات متحده آمریکا، 24-27 اکتبر 2010.
- مقدم، م. انتخابی، د. گویخمان، ی. لی، ک. لیو، ام. ماهاجان، ع. نیار، ع. شومان، دی. Teneketzis، D. شبکه بی سیم حسگر رطوبت خاک با استفاده از کنترل بهینه مبتنی بر فیزیک: مفهوم و نمایش های اولیه. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2010 , 3 , 522-535. [ Google Scholar ] [ CrossRef ]
- پایداری و قابلیت استفاده مجدد نرم افزار زیرساخت سایبری: گزارش از یک کارگاه آموزشی با بودجه NSF. در دسترس به صورت آنلاین: https://scholarworks.iu.edu/dspace/handle/2022/6701 (در 27 مه 2016 قابل دسترسی است).
- وانگ، اس. Zhu، XG Coupling زیرساختهای سایبری و سیستمهای اطلاعات جغرافیایی برای توانمندسازی تحقیقات زیستمحیطی و زیستمحیطی. BioScience 2008 ، 58 ، 94-95. [ Google Scholar ] [ CrossRef ]
- رایت، دی جی؛ وانگ، اس. ظهور زیرساخت سایبری فضایی. Proc. Natl. آکادمی علمی ایالات متحده آمریکا 2011 ، 108 ، 5488-5491. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- وانگ، اس. Liu, Y. TeraGrid GIScience gateway: Bridgeing cyber infrastructure and GIScience. بین المللی جی. جئوگر. Inf. علمی 2009 ، 23 ، 631-656. [ Google Scholar ] [ CrossRef ]
- وانگ، اس. آنسلین، ال. بهادوری، بی. کرازبی، سی. Goodchild، MF; لیو، ی. Nyerges، نرم افزار TL CyberGIS: یک بررسی ترکیبی و نقشه راه یکپارچه. بین المللی جی. جئوگر. Inf. علمی 2013 ، 27 ، 2122-2145. [ Google Scholar ] [ CrossRef ]
- فیلیپس، AJL؛ نیولندز، NK; لیانگ، SHL؛ Ellert، BH سنجش یکپارچه رطوبت خاک در مقیاس مزرعه: نمونهبرداری، مدلسازی و اشتراکگذاری برای بهبود تصمیمگیری کشاورزی. محاسبه کنید. الکترون. کشاورزی 2014 ، 107 ، 73-88. [ Google Scholar ] [ CrossRef ]
- کردوان، پ. بیل، آر. Böling, S. یک زیرساخت ژئوداده قابل همکاری برای کشاورزی دقیق. در مجموعه مقالات هفتمین کنفرانس AGILE در علم اطلاعات جغرافیایی، هراکلیون، یونان، 29 آوریل تا 1 مه 2004.
- ژانگ، ایکس. سیلان، س. Seielstad، G. دشت های بزرگ شمالی دیجیتال: یک سیستم مبتنی بر وب که داده های سنجش از راه دور تقریباً در زمان واقعی را برای کشاورزی دقیق ارائه می دهد. Remote Sens. 2010 , 2 , 861-873. [ Google Scholar ] [ CrossRef ]
- عبدالفتاح، م. Kumar، AT یک سیستم اطلاعات خاک مبتنی بر GIS برای امارات متحده عربی و کاربرد آن در برنامه ریزی کاربری اراضی کشاورزی. عرب جی. ژئوشی. 2014 ، 8 ، 1-15. [ Google Scholar ] [ CrossRef ]
- استانووسکا اسلاواوا، ک. وزنیاک، تی. Ristol, S. (Eds.) Grid and Cloud Computing: A Business Perspective on Technology and Applications ; Springer: برلین، آلمان، 2010.
- چانگ، WC; چن، سی سی; Jm، H. Lin، CY؛ Hsu، WL; وانگ، YC; لی، دی.تی. لای، اف. هوانگ، CW; Chang، YJ CloudDOE: ابزاری کاربرپسند برای استقرار ابرهای Hadoop و تجزیه و تحلیل داده های توالی یابی با توان بالا با MapReduce. PLoS ONE 2014 ، 9 ، e98146. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- چن، CLP; ژانگ، CY برنامههای کاربردی، چالشها، تکنیکها و فناوریهای فشرده داده: نظرسنجی در مورد دادههای بزرگ. آگاه کردن. علمی 2014 ، 275 ، 314-347. [ Google Scholar ] [ CrossRef ]
- یانگ، دبلیو. لیو، ایکس. ژانگ، ال. Yang, LT پردازش بیدرنگ دادههای بزرگ بر اساس طوفان. در مجموعه مقالات دوازدهمین کنفرانس بین المللی IEEE در مورد اعتماد، امنیت و حریم خصوصی در محاسبات و ارتباطات، ملبورن، VIC، استرالیا، 16-18 ژوئیه 2013. جلد 8، ص 1784–1787.
- دین، جی. Ghemawat، S. MapReduce: پردازش داده های ساده در خوشه های بزرگ. اشتراک. ACM 2008 ، 51 ، 107-113. [ Google Scholar ] [ CrossRef ]
- یووه، جی. دیلمن، ای. بریمان، GB; برمن، BP; Maechling، P. ارزیابی هزینه و عملکرد گردش کار علمی در آمازون EC2. J. Grid Comput. 2012 ، 10 ، 5-21. [ Google Scholar ] [ CrossRef ]
- بهزاد، ب. پادمنابان، ع. لیو، ی. لیو، ی. وانگ، اس. یکپارچه سازی دروازه CyberGIS با Windows Azure: مطالعه موردی در مورد شبیه سازی آب زیرزمینی MODFLOW. در مجموعه مقالات دومین کارگاه بین المللی ACM SIGSPATIAL در مورد عملکرد بالا و سیستم های اطلاعات جغرافیایی توزیع شده، شیکاگو، IL، ایالات متحده، 1 نوامبر 2011. ص 26-29.
- جیانگ، دبلیو. ژانگ، ال. لیائو، ایکس. جین، اچ. Peng, Y. یک سیستم ذخیره سازی مبتنی بر MongoDB خوشه ای جدید برای داده های بدون ساختار با در دسترس بودن بالا. محاسبات 2014 ، 96 ، 455-478. [ Google Scholar ] [ CrossRef ]
- برورینگ، آ. استاش، سی. Echterhoff, J. OGC Sensor Observation Service Interface Standard ; نسخه 2.0؛ کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2012. [ Google Scholar ]
- یو، پی. جیانگ، ال. Hu, L. جداول فیوژن گوگل برای مدیریت مشاهدات حسگر رطوبت خاک. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2014 , 7 , 4414–4421. [ Google Scholar ] [ CrossRef ]
- Schut, P. OpenGIS Web Processing Service ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2007. [ Google Scholar ]
- چن، ز. چن، ن. یانگ، سی. Di, L. Cloud computing خدمات پردازش وب را برای پردازش داده های رصد زمین فعال کرد. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2012 ، 5 ، 1637-1649. [ Google Scholar ] [ CrossRef ]
- کوین، سی. ژان، ال. Zhu، A. چگونه می توان کتابخانه انتزاع داده های جغرافیایی (GDAL) را به درستی در ورودی/خروجی شطرنجی جغرافیایی موازی اعمال کرد؟ ترانس. GIS 2014 ، 18 ، 950-957. [ Google Scholar ] [ CrossRef ]
- غلام، ع. Qin، Q. تیپ، ت. Li, Z. اصلاح شده شاخص خشکسالی عمودی (MPDI): یک روش پایش خشکسالی در زمان واقعی. ISPRS J. Photogramm. Remote Sens. 2007 , 62 , 150-164. [ Google Scholar ] [ CrossRef ]
- کاندیاگو، اس. رموندینو، اف. د گیلیو، م. دوبینی، م. Gattelli، M. ارزیابی تصاویر چندطیفی و شاخصهای پوشش گیاهی برای کاربردهای کشاورزی دقیق از تصاویر پهپاد. Remote Sens. 2015 ، 7 ، 4026–4047. [ Google Scholar ] [ CrossRef ]
- مک نالی، ا. شوکلا، س. Arsenault، KR؛ وانگ، اس. پیترز-لیدار، سی دی; Verdin، JP ارزیابی رطوبت خاک ESA CCI در شرق آفریقا. بین المللی J. Appl. زمین Obs. 2016 ، 48 ، 96-109. [ Google Scholar ] [ CrossRef ]
- شیائو، ز. لیانگ، اس. وانگ، تی. لیو، کیو. بازسازی بازتاب سطح زمین بر اساس شاخصهای پوشش گیاهی موقتی-پیوسته. Remote Sens. 2015 ، 7 ، 9844–9864. [ Google Scholar ] [ CrossRef ]
- Yagci، AL اثر تناوب ذرت- سویا بر شاخصهای خشکسالی مبتنی بر NDVI: مطالعه موردی در آیووا، ایالات متحده آمریکا، با استفاده از شاخص وضعیت پوشش گیاهی. گیسی. Remote Sens. 2015 ، 52 ، 290-314. [ Google Scholar ] [ CrossRef ]
- بستر مدیریت خدمات مشترک وب سنسور جغرافیایی در دسترس آنلاین: http://gsw.whu.edu.cn:9002/SensorWebPro/# (در 22 اکتبر 2015 قابل دسترسی است).
- لو، جی. وونگ، دی. تکنیک درون یابی فضایی وزن دهی با فاصله معکوس تطبیقی. محاسبه کنید. Geosci. 2008 ، 34 ، 1044-1055. [ Google Scholar ] [ CrossRef ]
- مولر، TG; Pusuluri، NB; ماتیاس، KK; کورنلیوس، PL; Barnhisel، RI; کیفیت نقشه Shearer، SA برای کریجینگ معمولی و درونیابی وزنی با فاصله معکوس. علم خاک Soc. صبح. J. 2004 ، 68 ، 2042-2047. [ Google Scholar ] [ CrossRef ]
شکل 1. معماری زیرساخت اطلاعات فضایی-زمانی سایبری-فیزیکی مبتنی بر محاسبات ابری.
شکل 2. نقشه/کاهش گردش کار برای EOD در چارچوب پیشنهادی. EODx تصویر سنجش از راه دور خاص مانند تصویر GF-1 را نشان می دهد و mappingx نشان دهنده SM mappingx است که توسط شاخص وارونگی SM معکوس شده است.

شکل 3. نقشه/کاهش گردش کار حسگرهای درجا در چارچوب پیشنهادی.

شکل 4. جریان عملیات وب سرویس در نظارت SM.
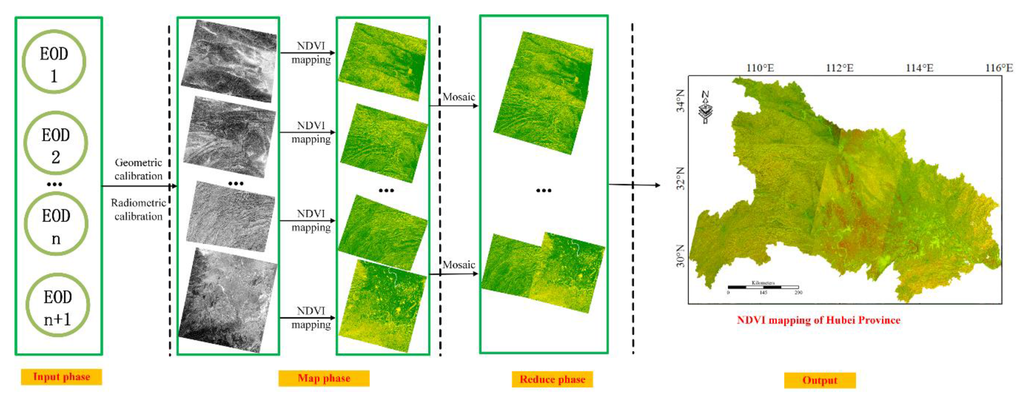
شکل 5. فرآیند MapReduce که برای نقشه برداری NDVI در استان هوبی استفاده می شود.

شکل 6. زمان مصرف مرتبط با نقشه برداری NDVI در استان هوبی با استفاده از روش های WPS (تک گره)، CESCI (پنج گره)، CESCI (چهار گره)، CESCI (سه گره)، و CESCI (دو گره).
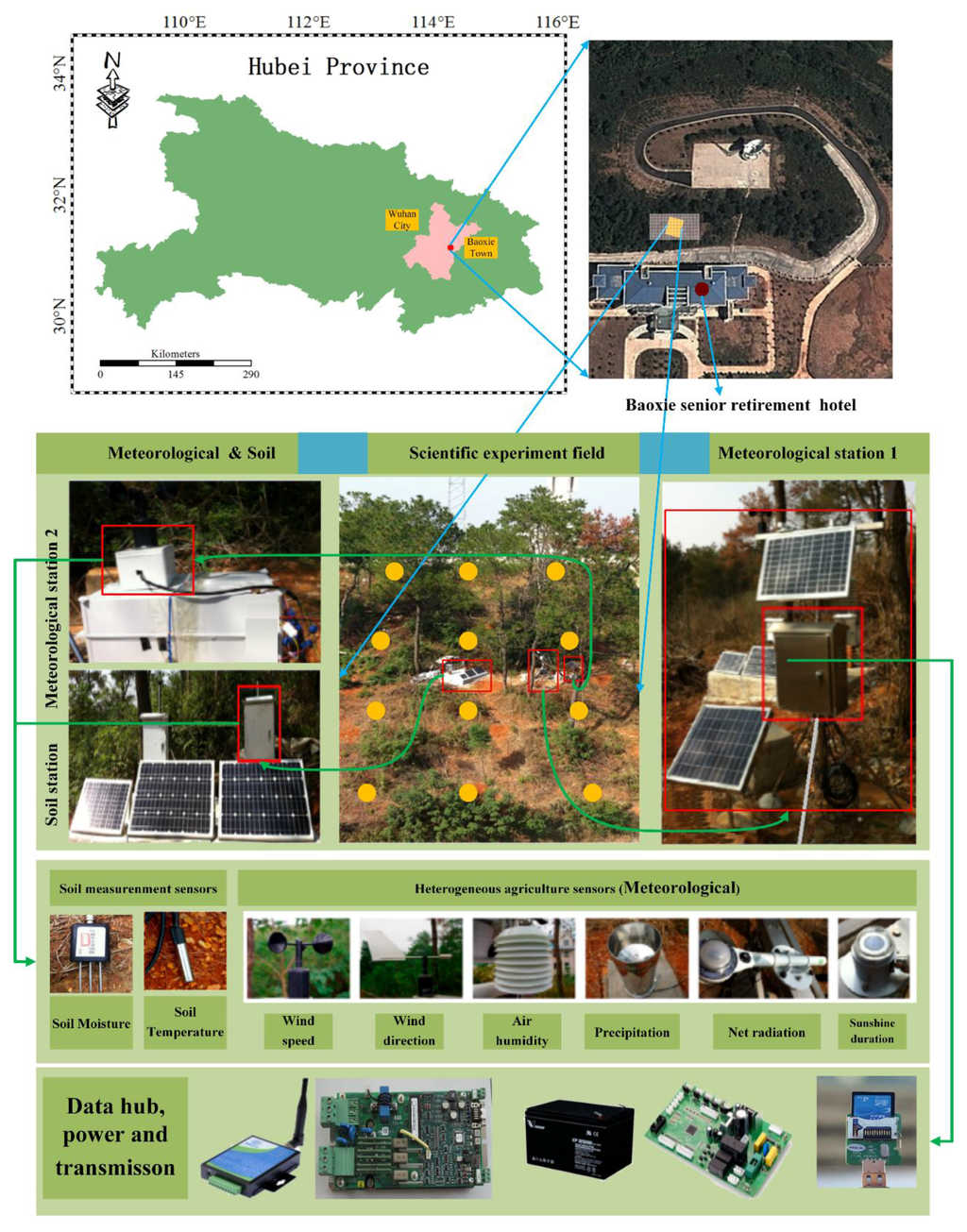
شکل 7. سایت آزمایشی و کل سیستم مانیتورینگ سنسورهای مستقر شده.
شکل 8. بستر خدمات مشترک وب حسگر جغرافیایی و تجسم مشاهدات SM و هواشناسی بر اساس CESCI پیشنهادی.
شکل 9. مقدار SM، حداکثر مقدار SM، حداقل مقدار SM، و مقدار متوسط SM نزدیک به منحنی های زمان واقعی.
شکل 10. پورتال وب، یک نقشه SM در حال پرواز را بر اساس زیرساخت های فیزیکی سایبری پیشنهادی نشان می دهد.

شکل 11. مصرف زمان درون یابی تعداد مختلف نقاط درون یابی با استفاده از روش های WPS (تک گره)، CESCI (پنج گره)، CESCI (چهار گره)، CESCI (سه گره) و CESCI (دو گره).

جدول 1. طرح موردی تجزیه و تحلیل آماری در فرآیند نقشه/کاهش.
جدول 2. مقایسه با سایر CI ها و روش ها در PA.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر