

خلاصه
مرکز سنجش از دور ورقه های یخی (CReSIS) در دانشگاه کانزاس از سال 1993 تقریباً 1000 ترابایت (TB) از داده های سنجش عمق راداری را بر روی ورقه های یخی قطب شمال و قطب جنوب جمع آوری کرده است تا ضخامت صفحات یخ را ترسیم کند. در نهایت اثرات تغییرات آب و هوا و افزایش سطح دریا را درک کنید. علاوه بر جمع آوری داده ها، ذخیره سازی، مدیریت و توزیع عمومی مجموعه داده نیز نقش های اصلی CReSIS هستند. پروژه Open Polar Server (OPS) یک زیرساخت منبع باز و رایگان برای ذخیره، مدیریت، تجزیه و تحلیل و توزیع داده های جمع آوری شده توسط CReSIS در تلاش برای جایگزینی روش ذخیره سازی و توزیع داده فعلی خود ایجاد کرد. زیرساخت OPS شامل سیستم مدیریت پایگاه داده فضایی (DBMS)، نقشه و وب سرور، ژئوپورتال جاوا اسکریپت، و رابط برنامه نویسی کاربردی MATLAB (API) برای گنجاندن داده های ایجاد شده توسط جامعه کرایوسفر. نرم افزارهای منبع باز از جمله GeoServer، PostgreSQL، PostGIS، OpenLayers، ExtJS، GeoEXT و سایرین برای ساختن سیستمی استفاده می شوند که توزیع داده های CReSIS را برای کل جامعه کرایوسفر مدرن می کند و یک پلت فرم انعطاف پذیر برای توسعه آینده ایجاد می کند. تجزیه و تحلیل قابلیت استفاده نشان می دهد که زیرساخت OPS یک تجربه کاربر نهایی بهبود یافته را ارائه می دهد. علاوه بر این، توپوگرافی یخچال های طبیعی درون یابی به عنوان یک نمونه کاربردی از سیستم ارائه شده است. GeoEXT و دیگران برای ساختن سیستمی استفاده میشوند که توزیع دادههای CReSIS را برای کل جامعه کرایوسفر مدرن میکند و یک پلتفرم انعطافپذیر برای توسعه آینده ایجاد میکند. تجزیه و تحلیل قابلیت استفاده نشان می دهد که زیرساخت OPS یک تجربه کاربر نهایی بهبود یافته را ارائه می دهد. علاوه بر این، توپوگرافی یخچال های طبیعی درون یابی به عنوان یک نمونه کاربردی از سیستم ارائه شده است. GeoEXT و دیگران برای ساختن سیستمی استفاده میشوند که توزیع دادههای CReSIS را برای کل جامعه کرایوسفر مدرن میکند و یک پلتفرم انعطافپذیر برای توسعه آینده ایجاد میکند. تجزیه و تحلیل قابلیت استفاده نشان می دهد که زیرساخت OPS یک تجربه کاربر نهایی بهبود یافته را ارائه می دهد. علاوه بر این، توپوگرافی یخچال های طبیعی درون یابی به عنوان یک نمونه کاربردی از سیستم ارائه شده است.
کلید واژه ها:
CRESIS ; مدیریت داده ها ؛ زیرساخت داده های مکانی ; ژئوپورتال ; درون یابی
1. معرفی
در طول 30 سال گذشته، گرمایش جهانی 0.2 درجه سانتیگراد در هر دهه شناسایی شده است [ 1 ]. افزایش قابل توجه دما در مناطق قطب شمال و قطب جنوب به افزایش سطح جهانی دریاها کمک می کند، که به شدت بر محیط زندگی و تنظیمات اجتماعی-اقتصادی انسان هایی که در نزدیکی سطح متوسط فعلی دریا زندگی می کنند، تأثیر می گذارد [2 ] . با توجه به Mitrovica و همکاران. [ 3 ]، ذوب مجموعه یخی گرینلند معادل 0.6 میلی متر در سال -1 افزایش سطح دریا در طول قرن گذشته است. اخیراً، شپرد و همکاران. [ 4 ] گزارش داد که سهم کل صفحات یخی قطبی در افزایش سطح دریا 0.59 ± 0.20 میلی متر · سال -1 بوده است.به طور متوسط از سال 1992 با استفاده از مجموعه داده های ارتفاع سنجی، تداخل سنجی، و وزن سنجی ماهواره ای، با نرخ فعلی حدود 1 میلی متر · سال -1 است . در نتیجه، اندازهگیری سرعت سطح، جرم و ارتفاع سطح ورقههای یخی قطب شمال و قطب جنوب به منظور مدلسازی و شبیهسازی نحوه واکنش آنها به گرم شدن آب و هوا و پیشبینی سهم آنها در افزایش سطح دریا بسیار مهم است [5] . ].
مرکز سنجش از دور صفحات یخی (CReSIS)، با مأموریت توسعه فناوریها و مدلهای رایانهای جدید برای اندازهگیری و پیشبینی واکنش تغییر سطح دریا به تعادل جرم صفحات یخی در قطب شمال و قطب جنوب، دادههای بسیار مورد نیاز را جمعآوری میکند. مربوط به صفحات یخی و تغییرات سریعی که در آنها دستخوش می شود. مقادیر زیادی از دادههای مکانی از حسگرهای راه دور برای نظارت و بررسی پیشرفته محیط قطبی در CReSIS جمعآوری یا تولید شدهاند. از سال 1993، CReSIS، یا گروه های پیش ساز CReSIS، بیش از 1000 ترابایت داده خام را در قطب شمال و قطب جنوب با استفاده از مجموعه ای از رادارهای توسعه یافته در مرکز جمع آوری کرده اند. تحویل این مجموعه داده یکی از وظایف اصلی CReSIS است. به عنوان توزیع کننده چنین مجموعه داده مهمی در جامعه کرایوسفر،
در طول چند دهه اخیر، اجرای زیرساخت داده های مکانی (SDI) دسترسی به داده های مکانی را برای تعداد زیادی از کاربران تسهیل کرده است [ 6 ]. SDI محیطی را ارائه میکند که طیف وسیعی از کاربران بالقوه را قادر میسازد تا مجموعه دادههای جغرافیایی را به راحتی به صورت ایمن، سازگار و کامل به دست آورند و نگهداری کنند [ 7 ]. این فرصت را برای انتشار و به اشتراک گذاری اطلاعات جغرافیایی غنی از طریق وب، و به سرعت یکپارچه سازی و استفاده از مجموعه داده های جغرافیایی فراهم می کند [ 8 ]. در جامعه GIS (سیستم اطلاعات جغرافیایی)، استانداردها و توسعه نرمافزارهای متنباز و آزاد (FOSS) زیر چتر سیستم اطلاعات جغرافیایی باز قرار میگیرد که در ابتدا توسط کنسرسیوم Open GIS ترویج شد [ 6 ، 9 ،10 ].
با این حال، ابزارهای نرمافزار منبع باز، به دلیل عدم پشتیبانی رسمی و مشکلات اشکالزدایی، همیشه در سیستمهای بسیار پرمخاطب به خوبی کار نمیکنند [ 11 ]، که باعث میشود برنامههای GIS وب منبع باز گاهی اوقات فقط به عنوان آزمایش عمل کنند. در نتیجه، توسعه و آزمایش برنامههای GIS وب منبع باز با دادههای مکانی بزرگ در دنیای واقعی مهم است. اخیراً چندین زیرساخت از این دست اجرا شده است. گکاتزوفلیاس و همکاران [ 11 ] توسعه یک برنامه GIS وب منبع باز را بررسی کرد که نقشه ها و فایل ها را به عنوان بخشی از یک سیستم فهرست انتشار تولید و توزیع می کند. دلی پترو و همکاران [ 12] یک برنامه وب برای مدیریت، ارائه، ذخیره، مدل سازی و بهینه سازی منابع آب جغرافیایی بر اساس نرم افزار منبع باز توسعه داد. زاوالا-رومرو و همکاران [ 13 ] منبع باز وب GIS (OWGIS) را پیاده سازی کرد که می تواند داده های مکانی چند بعدی را از سرورهای نقشه مجزا نمایش دهد. این برنامههای GIS وب، موفقیت ابزارهای نرمافزار منبع باز را در زمینههای مختلف تحقیقاتی نشان دادند. تحقیق ما نمونه دیگری را ارائه میکند که نشان میدهد نرمافزارها و فناوریهای منبع باز میتوانند برای توسعه یک برنامه وب قوی و یکپارچه استفاده شوند که دادههای جغرافیایی متنوعی را برای جامعه تحقیقاتی کرایوسفر بر اساس مطالعات قبلی ارائه میکند.
در جامعه کرایوسفر، دو سیستم دسترسی اولیه به داده وجود دارد: PolarGrid Cloud GIS ( http://www.polargrid.org/cloud-gis-service.html ) و مرکز ملی داده های برف و یخ (NSIDC) Operation Ice Bridge ( OIB، http://nsidc.org/icebridge/portal/ ). با این حال، PolarGrid Cloud GIS برای عموم آزاد نیست. پورتال NSIDC OIB عمدتاً برای مرور محصولات داده قطبی از جمله گزارش های پرواز و هندسه پرواز استفاده می شود و کاربران می توانند از سایت پروتکل انتقال فایل (FTP)، خدمات OGC و رمزگذاری هایی مانند WMS، WFS، GML و KML برای دسترسی استفاده کنند. محصولات داده NSIDC
در این کار، نویسندگان یک سیستم جدید، Open Polar Server (OPS) ارائه میکنند که راه حلی برای اهداف حلنشده ارائه میدهد. هدف اصلی این کار توسعه یک زیرساخت منبع باز و رایگان است که قادر به ذخیره، مدیریت، ایجاد، تجزیه و تحلیل و توزیع مجموعه داده های جمع آوری شده توسط CReSIS به گونه ای است که تجربه بهبود یافته ای را برای کاربران و تولیدکنندگان اولیه داده ها فراهم کند. . یک هدف ثانویه طراحی OPS به گونه ای است که به کل جامعه کرایوسفر اجازه می دهد مجموعه داده های جدیدی را برای گنجاندن در سیستم فراهم کند. برای دستیابی به هدف ثانویه، توجه ویژه ای به استانداردسازی و تعمیم اجزای OPS سفارشی شد.
انگیزه این تحقیق، از جمله مجموعه داده های مکانی و مسائل مربوط به ذخیره و توزیع داده ها، در بخش 2 توضیح داده شده است . معماری و توسعه منبع باز در بخش 3 مورد بحث قرار گرفته است . ارزیابی در مورد OPS در بخش 4 ارائه شده است . نمونه ای از کاربرد داده های ارائه شده توسط OPS در بخش 5 ارائه شده است . خلاصه ای از تحقیقات و کارهای احتمالی آینده در بخش 6 ارائه شده است .
2. انگیزه تحقیق برای پروژه OPS
CReSIS از سال 1993 اقدام به جمع آوری، ذخیره، مدیریت و توزیع داده های قطبی کرده است. چندین سیستم مدیریت داده قبل از OPS وجود داشته است. این بخش سیستم های ذخیره سازی و توزیع داده های pre-OPS را شرح می دهد و مسائل مربوط به این سیستم ها را مورد بحث قرار می دهد و سپس اهداف تحقیق این مقاله را ارائه می دهد.
2.1. داده ها
CReSIS کمک کننده اصلی داده به OPS است. بیشتر مجموعه دادههای CReSIS به شکل اکوگرامهای راداری هستند که مقطع دوبعدی لایههای یخی قطب شمال و قطب جنوب را نشان میدهند. اکوگرام های راداری به عنوان داده های سطح 1B (L1B) تعیین می شوند که توسط ناسا به عنوان “داده هایی که برای واحدهای حسگر پردازش شده اند” تعریف می شوند. آنها یک محصول داده ارائه می دهند که می توان از آن اطلاعات قابل استفاده استخراج کرد، از جمله موقعیت سطح یخ، کف یخ و در صورت تمایل، لایه های یخ داخلی ( شکل 1) .). فرآیند استخراج (رقومی سازی) با استفاده از برنامه Data Picker، یک بسته نرم افزاری سفارشی MATLAB که در CReSIS برای استخراج دستی و خودکار لایه های یخ توسعه یافته است، تکمیل می شود. برنامه Data Picker قبل از توسعه OPS وجود داشت و در اصل برای پشتیبانی از استخراج تنها سطح یخ و لایه های زیرین با داده های ذخیره شده در فایل های مسطح ساخته شد: فایل های MATLAB که مستقیماً از طریق یک شبکه محلی در CReSIS بارگیری می شوند. نسخه ارائه شده در اینجا یک طراحی مجدد اصلی برنامه است که امکان استخراج هر لایه را فراهم می کند و خدمات CRUD (ایجاد، خواندن، به روز رسانی و حذف) را در OPS از طریق OPS MATLAB API انجام می دهد. OPS MATLAB API در بخش 3 بیشتر توضیح داده خواهد شد. برنامه مجموعه داده ای از نقاط را تولید می کند که هر کدام دارای مجموعه ای از ویژگی ها هستند. این نقاط بهعنوان دادههای سطح 2 (L2) تعیین شدهاند که توسط ناسا بهعنوان «متغیرهای ژئوفیزیکی مشتقشده در وضوح و مکان مشابه دادههای منبع سطح 1» تعریف شدهاند. محصولات داده L2 اولیه از CReSIS سطح یخ، کف یخ و ضخامت یخ حاصل از اکوگرام های راداری استخراج شده است.
سهم عمده جامعه در مجموعه داده ای که توسط OPS پشتیبانی می شود، دیجیتالی کردن لایه های یخ داخلی از اکوگرام های رادار CReSIS است. قبل از توسعه OPS، فقط سطح یخ دیجیتالی و کف یخ به طور بومی در سیستمهای CReSIS پشتیبانی میشد. با انتقال به OPS، هر لایه دیجیتالی (از جمله چندین نسخه از همان لایه) را می توان گنجاند. این به هر عضوی از جامعه کرایوسفر اجازه میدهد تا لایههای خود را که از اکوگرامهای راداری CReSIS مشتق شدهاند را شامل شود. استفاده از یک زیرساخت واحد برای ذخیره، مدیریت، تجزیه و تحلیل و توزیع داده های مشتق شده از جامعه امکان مقایسه ساده را فراهم می کند و همکاری بین گروه های تحقیقاتی قبلاً قطع شده را تقویت می کند.
علاوه بر مجموعه داده های مشتق شده از اکوگرام های راداری، OPS همچنین مجموعه ای از داده های مرجع برداری و شطرنجی را نگهداری می کند. مجموعه داده های مرجع شامل تصاویر، داده های سرعت، مدل های ارتفاع سنگ بستر و داده های خط ساحلی است.
2.2. ذخیره سازی داده ها و مسائل
قالب اصلی ذخیره سازی داده برای مجموعه داده های CReSIS L1B و L2 فرمت فایل باینری MATLAB است که معمولاً به دلیل پسوند mat آنها به عنوان فایل MAT شناخته می شود. CReSIS این فرمت را به عنوان محفظه اصلی ذخیره داده خود انتخاب کرد زیرا تمام پردازش داده ها، دیجیتالی کردن (انتخاب) و تجزیه و تحلیل با استفاده از MATLAB انجام می شود. CReSIS دو نوع اصلی از فایلهای MAT را تعیین میکند: فایلهای DATA و فایلهای LayerData. فایل های DATA مقادیر اکوگرام راداری L1B و فایل های LayerData سطح یخ L2 و لایه های پایین را ذخیره می کنند. داده های جمع آوری شده در CReSIS بر اساس روز سازماندهی می شود و سپس هر روز به بخش هایی تقسیم می شود. هر بخش بیشتر به فریم ها تقسیم می شود. حداقل یک فایل LayerData در هر فریم وجود دارد، اما اگر لایههای اضافی از اکوگرامهای راداری استخراج شوند، میتوانند تعداد بیشتری نیز داشته باشند. علاوه بر دو فایل اصلی، CReSIS همچنین اطلاعات اضافی در مورد هندسه مسیر جمع آوری داده ها را در قالب فایل MAT ذخیره می کند. مسیرها یا مسیرهای جمع آوری داده ها به عنوان خطوط پرواز نامیده می شوند و در فایل های MAT به نام فایل های GPS، RECORDS و FRAMES ذخیره می شوند. یک فایل GPS در هر پرواز یا ماموریت و یک فایل RECORDS و یک فایل FRAMES در هر بخش داده وجود دارد. یک بخش داده به عنوان مسیری از داده های جمع آوری شده به طور مداوم تعریف می شود و ممکن است در هر ماموریت چندین بخش داده وجود داشته باشد. فایلهای GPS دادههای زمان و موقعیت را از دستگاههای GPS داخلی ذخیره میکنند. فایل های RECORDS داده های زمان و موقعیت را که با حسگر هماهنگ شده اند ذخیره می کنند. فایلهای FRAMES شاخصهای دادهها را در فایلهای رکورد ذخیره میکنند که تقسیم بندی بخشها به فریم را مشخص میکنند. مسیرها یا مسیرهای جمع آوری داده ها به عنوان خطوط پرواز نامیده می شوند و در فایل های MAT به نام فایل های GPS، RECORDS و FRAMES ذخیره می شوند. یک فایل GPS در هر پرواز یا ماموریت و یک فایل RECORDS و یک فایل FRAMES در هر بخش داده وجود دارد. یک بخش داده به عنوان مسیری از داده های جمع آوری شده به طور مداوم تعریف می شود و ممکن است در هر ماموریت چندین بخش داده وجود داشته باشد. فایلهای GPS دادههای زمان و موقعیت را از دستگاههای GPS داخلی ذخیره میکنند. فایل های RECORDS داده های زمان و موقعیت را که با حسگر هماهنگ شده اند ذخیره می کنند. فایلهای FRAMES شاخصهای دادهها را در فایلهای رکورد ذخیره میکنند که تقسیم بندی بخشها به فریم را مشخص میکنند. مسیرها یا مسیرهای جمع آوری داده ها به عنوان خطوط پرواز نامیده می شوند و در فایل های MAT به نام فایل های GPS، RECORDS و FRAMES ذخیره می شوند. یک فایل GPS در هر پرواز یا ماموریت و یک فایل RECORDS و یک فایل FRAMES در هر بخش داده وجود دارد. یک بخش داده به عنوان مسیری از داده های جمع آوری شده به طور مداوم تعریف می شود و ممکن است در هر ماموریت چندین بخش داده وجود داشته باشد. فایلهای GPS دادههای زمان و موقعیت را از دستگاههای GPS داخلی ذخیره میکنند. فایل های RECORDS داده های زمان و موقعیت را که با حسگر هماهنگ شده اند ذخیره می کنند. فایلهای FRAMES شاخصهای دادهها را در فایلهای رکورد ذخیره میکنند که تقسیم بندی بخشها به فریم را مشخص میکنند. یک بخش داده به عنوان مسیری از داده های جمع آوری شده به طور مداوم تعریف می شود و ممکن است در هر ماموریت چندین بخش داده وجود داشته باشد. فایلهای GPS دادههای زمان و موقعیت را از دستگاههای GPS داخلی ذخیره میکنند. فایل های RECORDS داده های زمان و موقعیت را که با حسگر هماهنگ شده اند ذخیره می کنند. فایلهای FRAMES شاخصهای دادهها را در فایلهای رکورد ذخیره میکنند که تقسیم بندی بخشها به فریم را مشخص میکنند. یک بخش داده به عنوان مسیری از داده های جمع آوری شده به طور مداوم تعریف می شود و ممکن است در هر ماموریت چندین بخش داده وجود داشته باشد. فایلهای GPS دادههای زمان و موقعیت را از دستگاههای GPS داخلی ذخیره میکنند. فایل های RECORDS داده های زمان و موقعیت را که با حسگر هماهنگ شده اند ذخیره می کنند. فایلهای FRAMES شاخصهای دادهها را در فایلهای رکورد ذخیره میکنند که تقسیم بندی بخشها به فریم را مشخص میکنند.شکل 2 یک نمایش گرافیکی از فایل های GPS، RECORDS، FRAMES، DATA و LayerData را برای یک بخش از داده ها نشان می دهد.
هر فریم (کوچکترین تقسیم در طول مسیر داده های CReSIS) به عنوان مجموعه ای از دو یا چند فایل MAT روی دیسک ذخیره می شود. این فایلها اطلاعات موقعیتی هواپیما در حین جمعآوری، نقاط لایه دیجیتالی، دادههای خام اکوگرام راداری و موارد دیگر را ذخیره میکردند. برای یک کمپین میدانی معمولی (معمولاً چند کمپین در سال وجود دارد)، تقریباً 1500 فریم وجود دارد که منجر به حداقل 3000 فایل روی دیسک می شود. علاوه بر این فایلهای MAT، تعدادی دیگر از فرمتهای خروجی داده، از جمله CSV، JPEG، OGC KML نسخه 2.2 [ 14 ]، OGC NetCDF نسخه 1.0 [ 15]] و دیگران، توسط کاربران داده مورد نیاز است. این فایلهای خروجی معمولاً در هر فریم ایجاد میشوند، به این معنی که یک مجموعه داده خروجی از CReSIS شامل تقریباً 10000 فایل است. این مجموعه از فایلها به چند صد گیگابایت (گیگابایت) روی دیسک (به استثنای دادههای خام) برای یک ماموریت معمولی منجر میشود.
در حالی که ذخیره سازی مبتنی بر فایل برای مجموعه داده های کوچکی که به صورت محلی ذخیره می شوند خوب است، معایب زیادی دارد که برخی از آنها عبارتند از: (1) کتابخانه ها/کدهای اضافی برای بارگیری، پردازش و تجزیه و تحلیل هر قالب فایل مورد نیاز است. (2) داده های مرتبط ذخیره شده در فایل های جداگانه باید برای مقایسه بارگذاری شوند. (3) فایل ها به نرم افزار اضافی برای مدیریت دسترسی به داده ها و ثبت ویرایش داده ها نیاز دارند. (4) یک فایل نمی تواند توسط بیش از یک کاربر در یک زمان استفاده و اصلاح شود. (5) اکثر فرمت های فایل از نمایه سازی داده ها پشتیبانی نمی کنند که می تواند دسترسی به داده ها و عملکرد تجزیه و تحلیل را بهبود بخشد. و (6) داده ها باید به منظور ذخیره فرمت های مختلف فایل تکرار شوند.
2.3. توزیع داده ها و مسائل
قبل از OPS، توزیع مجموعه داده مبتنی بر فایل CReSIS با استفاده از یک سایت پشتیبانی شده توسط FTP انجام می شد. دو سایت FTP به کاربران اجازه دسترسی به داده ها را می دادند: CReSIS FTP و آرشیو داده NSIDC. سایت های FTP یک نمایش ساده مبتنی بر وب از مجموعه داده های مبتنی بر فایل روی دیسک را ارائه می دهند. در حالی که CReSIS FTP فقط نمایشی از فضای ذخیره سازی روی دیسک CReSIS است، سایت آرشیو داده NSIDC شامل صفحات کاتالوگ و یک طرح ناوبری پیشرفته تر است.
موضوع بازیابی داده ها به طور مستقیم از یک وب سایت FTP ارزش بررسی دارد. اجازه دهید کار مشترک دسترسی به داده زیر را تصور کنیم: استفاده از سایت CReSIS FTP برای دانلود تمام داده های ضخامت یخ در یک منطقه مشخص. اگر کاربر برای دانلود دادههای CReSIS از سالهای 1993 تا 2013 در منطقه یخچالهای طبیعی Petermann از رویکرد جستجوی KML پیروی کند، ابتدا باید تقریباً 170 گیگابایت فایل KML ارسال شده را دانلود کند، سپس تقریباً 360 شناسه بخش منحصربهفرد را بیابد و در نهایت به تقریباً پیمایش کند. 10 دایرکتوری مختلف در سایت FTP برای دانلود 360 فایل منحصر به فرد در یکی از فرمت های ارائه شده (مانند MAT، CSV، NetCDF). پس از دانلود، آنها باید همه دادههای دانلود شده را ادغام کنند و مجموعه دادههای حاصل را در منطقه مورد مطالعه خود زیر مجموعه قرار دهند. به عنوان یک نتیجه،
2.4. اهداف پروژه
اکنون باید مشخص شود که CReSIS قبل از توسعه زیرساخت OPS با چه مشکلاتی مواجه بوده است. با توجه به ناکافی بودن سیستم هایی که به راحتی در دسترس CReSIS برای ذخیره سازی و توزیع داده ها هستند، هدف اولیه پروژه OPS ایجاد یک زیرساخت منبع باز و رایگان است که قادر به ذخیره، مدیریت، ایجاد، تجزیه و تحلیل و توزیع مجموعه داده های جمع آوری شده توسط CReSIS در راهی که تجربه بهبود یافته ای را هم برای کاربران نهایی و هم برای تولیدکنندگان اولیه داده های سنجش از دور قطبی فراهم می کند. از این هدف، مجموعه ای از اهداف روشن برای OPS شناسایی می شوند: (1) توسعه یک پایگاه داده برای جایگزینی ذخیره سازی مبتنی بر فایل. (2) توسعه یک سیستم بازیابی اطلاعات مبتنی بر وب (ژئوپورتال). (3) توسعه API برای تعامل بین MATLAB و سیستم جدید برای ساده سازی پردازش داده ها. (4) زیرساخت را عمومی می کند و مجموعه داده های مشتق شده از جامعه را شامل می شود. و (5) نرم افزار رایگان و متن باز را با جامعه به اشتراک بگذارید.
3. معماری و اجرای زیرساخت OPS
تعریف SDI و اجزایی که باید شامل SDI باشد بارها مورد بررسی و بحث قرار گرفته است [ 6 ، 16 ، 17 ]. SDI را می توان به طور ساده تر به عنوان مجموعه ای از نرم افزار، سخت افزار و کد سفارشی مورد نیاز برای ارائه خدمات اولیه داده مانند ذخیره سازی، مدیریت، تجزیه و تحلیل و توزیع برای کاربران داده و تولیدکنندگان داده تعریف کرد. نرم افزار، سخت افزار و کد مورد نیاز بر اساس داده ها، مدیریت و نیازهای توزیع یک سازمان متفاوت است. بخش های زیر اجزای مورد نیاز و سفارشی زیرساخت OPS را تشریح می کند. در اینجا لازم به ذکر است که تمامی اجزای ایجاد شده یا استفاده شده در OPS، به جز MATLAB، طبق کنسرسیوم فضایی باز (OGC) رایگان و متن باز هستند [18 ] خدمات اجتماعی و استانداردها [ 18 ، 19 ، 20 ]. در انتخاب مولفه های منبع باز SDI تلاش شد تا از راهنمای ارائه شده توسط Steiniger و Hunter پیروی شود [ 6 ]. با این حال، اغلب مشخص میشود که بستههای نرمافزاری خاص انتخاب آشکار (و گاهی اوقات تنها) در دستههای مربوطه خود هستند. شکل 3 ساختار مفهومی OPS را نشان می دهد و شکل 4 نرم افزار واقعی انتخاب شده برای پر کردن نقش های اجزا در شکل 3 را نشان می دهد . فلش ها ارتباط و تعامل بین اجزای مختلف OPS را نشان می دهد. میز 1نرم افزار خاص و نسخه مربوط به آن را خلاصه می کند.
3.1. طراحی طرحواره
یک سیستم مدیریت پایگاه داده رابطه ای (RDBMS) راه حل هایی را برای تمام معایب ذخیره سازی مبتنی بر فایل ارائه می دهد. با داده های بسیاری از فایل های ذخیره شده در یک پایگاه داده، می توان از قدرت زبان پرس و جو ساخت یافته (SQL) برای ساده کردن دسترسی و تجزیه و تحلیل داده ها استفاده کرد. دادههای موجود در پایگاه داده میتوانند از روشهای نمایهسازی مختلفی استفاده کنند که به SQL اجازه میدهد به سرعت دادهها را جستجو و پیدا کند و در نتیجه عملکرد قابلتوجهی به دست آورد. ترکیبی از PostgreSQL [ 21 ] و PostGIS [ 22] برای ساخت پایگاه داده ای به نام OPS برای ذخیره داده های مکانی و غیر مکانی انتخاب شده است. PostgreSQL یک سیستم پایگاه داده شی-رابطه ای قدرتمند و منبع باز است. PostGIS به عنوان توسعه دهنده پایگاه داده فضایی برای PostgreSQL انتخاب شده و پشتیبانی از نمایه سازی فضایی و پرس و جو در SQL را اضافه می کند.
طرح کامل پایگاه داده OPS در شکل یک نمودار موجودیت-رابطه (ER) در شکل 5 نشان داده شده است . هدف اصلی فرآیند طراحی پایگاه داده بهبود کارایی پرس و جو و در عین حال به حداقل رساندن افزونگی داده ها در پایگاه داده است. هنگامی که OPS توسعه یافت، چهار سیستم راداری مختلف در CReSIS وجود داشت: صداگیرهای عمق راداری (rds)، رادار انباشتگی (accum)، رادار برفی (برف) و رادار کوبند (kuband). در شکل 5، “sys” در نام جدول یکی از چهار سیستم راداری مختلف را نشان می دهد. جدول sys_locations شامل دو رکورد “Arctic” و “Antarctic” است. جدول sys_radars رادارهای خاص مورد استفاده برای جمع آوری داده ها مانند “mcrds”، “mcords” و “wise” را برای سیستم راداری rds ثبت می کند. جدول sys_seasons نامهای فصل جمعآوری دادههای مختلف، مانند “2014_Greenland_P3″، “2013_Antarctica_Basler” و غیره را ثبت میکند. جدول sys_layers لایههای مختلف ورقههای یخی، از جمله “سطح”، “پایین” و سایر لایههای یخ داخلی را ثبت میکند. جدول sys_point_paths نقاط در امتداد خطوط پرواز را با موقعیت جغرافیایی و ویژگی های مختلف ذخیره می کند. جدول sys_layer_points ویژگی های نقاط را در لایه های مختلف در مسیرهای نقطه ای خاص در جدول sys_point_paths ثبت می کند. جدول sys_crossovers موقعیت جغرافیایی نقاطی را که خطوط پرواز از یکدیگر عبور می کنند و دو مسیر نزدیکترین نقطه به نقطه متقاطع را ذخیره می کند. جدول sys_landmarks مکان و ویژگیهای مختلف ویژگیهای مهم مانند دریاچههای مدفون، مصنوعات دادهها و نقاط مورد علاقه را ثبت میکند. جدول sys_segments و sys_frames اطلاعات اولیه سگمنت ها و فریم ها را ذخیره می کند. علاوه بر این، چهار جدول به نامهای opsuser_userprofile_sys_season_groups، opsuser_userprofile_sys_layer_groups، opsuser_userprofile و auth_user برای مدیریت احراز هویت کاربران مختلف برای Data Picker برای اجرای وظایف CRUD ایجاد شدهاند. جدول sys_landmarks مکان و ویژگیهای مختلف ویژگیهای مهم مانند دریاچههای مدفون، مصنوعات دادهها و نقاط مورد علاقه را ثبت میکند. جدول sys_segments و sys_frames اطلاعات اولیه سگمنت ها و فریم ها را ذخیره می کند. علاوه بر این، چهار جدول به نامهای opsuser_userprofile_sys_season_groups، opsuser_userprofile_sys_layer_groups، opsuser_userprofile و auth_user برای مدیریت احراز هویت کاربران مختلف برای Data Picker برای اجرای وظایف CRUD ایجاد شدهاند. جدول sys_landmarks مکان و ویژگیهای مختلف ویژگیهای مهم مانند دریاچههای مدفون، مصنوعات دادهها و نقاط مورد علاقه را ثبت میکند. جدول sys_segments و sys_frames اطلاعات اولیه سگمنت ها و فریم ها را ذخیره می کند. علاوه بر این، چهار جدول به نامهای opsuser_userprofile_sys_season_groups، opsuser_userprofile_sys_layer_groups، opsuser_userprofile و auth_user برای مدیریت احراز هویت کاربران مختلف برای Data Picker برای اجرای وظایف CRUD ایجاد شدهاند.
3.2. سرور نقشه برداری
سرور نقشهبرداری برای تولید انواع فرمتهای دادههای مکانی زمین مرجع برای بازگشت از طریق سرویسهای وب استاندارد طراحی شده است. سرور نقشهبرداری دادههای مکانی را از دیسک سخت و پایگاه داده به اینترنت (از طریق WAS) از طریق سرویسهای استاندارد مختلف مانند Web Map Service (WMS)، Web Feature Service (WFS)، Web Map Tile Service (WMTS) و دیگران. سرور نقشه OPS در درجه اول از WMS استفاده می کند که پروتکلی است که ساختارهای درخواست و پاسخ را تعریف می کند. یک سرور نگاشت منبع باز با کیفیت معمولاً خدمات سازگار با OGC را پیاده سازی می کند زیرا اکثر مشتریان وب انتظار پاسخ در استاندارد OGC را دارند. GeoServer [ 23] برای OPS انتخاب شده است زیرا رایگان و منبع باز است و پیاده سازی مرجع برای استانداردهای خدمات وب OGC است. نقش GeoServer در OPS گرفتن داده های مکانی از هارد دیسک سرور و پایگاه داده و تولید تصاویر نقشه جغرافیایی مرجع است.
3.3. پورتال وب داده (ژئوپورتال)
ژئوپورتال OPS ( شکل 6 ) یک برنامه وب جاوا اسکریپت است که با کشف و دانلود داده های CReSIS به عنوان عملکرد اصلی آن طراحی شده است. کشف محتوای جغرافیایی نقش اصلی یک ژئوپورتال است [ 24 ]. ژئوپورتال OPS یک برنامه کامل MVC (Model View Controller) است که با استفاده از چارچوب Sencha ExtJS [ 25] توسعه یافته است.]، که یک پلت فرم توسعه برنامه با سازگاری بین مرورگرها، معماری پیشرفته MVC و یک رابط کاربری مدرن شیک (UI) است. ExtJS به صورت رایگان برای برنامه هایی که FOSS هستند توزیع می شود، به این معنی که توسعه دهندگان تجاری باید ExtJS را خریداری کنند اما توسعه دهندگان منبع باز می توانند از آن رایگان استفاده کنند. در حالی که کتابخانه ExtJS شامل تعداد زیادی ابزار و روش است، اما راه حلی برای محتوای مبتنی بر نقشه ندارد. یک کتابخانه منبع باز اضافی، GeoExt [ 26 ]، برای افزودن این قابلیت به ExtJS استفاده می شود. GeoExt یک چارچوب جاوا اسکریپت است که کلاسهای پایه چارچوب ExtJS را با استفاده از OpenLayers (OL) [ 27 ] کتابخانه نگاشت جاوا اسکریپت، یک کتابخانه نقشهبرداری وب به طور فعال توسعه یافته و منبع باز گسترش میدهد.
علاوه بر کشف و دانلود دادههای CReSIS، این ژئوپورتال برخی از قابلیتهای اساسی مرور دادهها را ارائه میکند که هدف آن آسان کردن اکتشاف داده است. این قابلیت ثانویه شامل توانایی کاربران برای مرور فضایی اکوگرام های رادار CReSIS به سادگی با کلیک کردن بر روی رابط نقشه است.
پورتال جغرافیایی OPS به یک OPS API جاوا اسکریپت سفارشی نیاز ندارد زیرا مشتری می تواند با استفاده از جاوا اسکریپت ناهمزمان و XML (AJAX) درخواست ها را مستقیماً به چارچوب وب OPS Django ارسال کند. AJAX برای ارسال درخواست های API به سرور OPS از جمله داده های سریالی JSON (جاوا اسکریپت شیء) استفاده می شود. این درخواستها مستقیماً به نماهای جنگو ارسال میشوند و به ژئوپورتال اجازه میدهند تا از منطق تعریفشده در جنگو استفاده کند.
3.4. کلاینت جمع کننده داده متلب
زیرساخت OPS از طیف گسترده ای از مشتریان و انواع درخواست پشتیبانی می کند. مشتریان اولیه OPS شامل یک ژئوپورتال وب هستند (معرفی شده در بخش 3.3) و یک برنامه متلب. برای اینکه یک کلاینت داده ها را در یک درخواست HTTP برای استفاده در نمای جنگو قرار دهد، از JSON برای رمزگذاری متغیرها در یک شی رشته ساختاریافته استفاده می شود. JSON یک نماد استاندارد است و دارای کتابخانه در اکثر زبان های برنامه نویسی برای رمزگذاری و رمزگشایی است. پایتون، جاوا اسکریپت و متلب همگی از فرمت JSON پشتیبانی میکنند که تمام زبانهای مورد استفاده در OPS را پوشش میدهد. MATLAB زبان برنامه نویسی اولیه است که توسط CReSIS برای پردازش داده ها، مدیریت داده ها و ایجاد محصولات داده برای توزیع استفاده می شود. بنابراین پروژه OPS یک API برای MATLAB ایجاد کرده است که امکان ارتباط بین API جنگو روی سرور و هر کلاینت محلی MATLAB را فراهم می کند. MATLAB API مجموعه ای از اسکریپت های متلب است که امکان ارتباط بین OPS Django API و زبان برنامه نویسی MATLAB را فراهم می کند. نقش اصلی MATLAB API تسهیل ارتباط بین MATLAB Data Picker و OPS است، اما امکان اجرای وظایف OPS CRUD از MATLAB را نیز فراهم می کند. هر نمای جنگو (شکل 7 یک تابع MATLAB متناظر در API MATLAB دارد. نقش تابع MATLAB گرفتن ورودی MATLAB (معمولا یک ساختار)، تبدیل آن به یک رشته JSON، ارسال آن به عنوان یک درخواست HTTP به وب سرور HTTP Apache، صبر کردن برای پاسخ HTTP و در نهایت رمزگشایی پاسخ به وب سرور HTTP است. یک ساختار متلب توابع MATLAB API هیچ یک از منطق وظیفه ای را که نشان می دهند انجام نمی دهند. تمام منطق توسط نماهای جنگو در سرور مدیریت می شود.
در حالی که API MATLAB می تواند به عنوان یک کتابخانه مستقل استفاده شود و عملکردهای آن در هر اسکریپت MATLAB گنجانده شده است، نقش اصلی API تسهیل عملیات انتخاب کننده داده های متلب سفارشی توسعه یافته توسط CReSIS است. اگرچه طراحی Data Picker به خودی خود بخشی مستقیم از این پروژه نیست، توسعه OPS و Data Picker جدید همزمان است و Data Picker بدون OPS MATLAB API و ذخیره سازی داده های پشتیبان که پایگاه داده OPS ارائه می دهد کار نمی کند. .
شکل 8رابط کاربری گرافیکی (GUI) Data Picker را نشان می دهد. رابط کاربری گرافیکی از سه پنجره اصلی تشکیل شده است، پنجره ترجیحی (بالا سمت چپ)، پنجره نقشه (پایین سمت چپ)، و پنجره انتخاب (راست). هر یک از این پنجره ها داده ها را از سرور OPS دریافت می کند. پنجره ترجیحی شامل گزینه هایی برای انتخاب داده هایی برای مشاهده در پنجره انتخاب است. اطلاعات مربوط به داده های موجود برای هر سیستم راداری، از جمله نام فصول جمع آوری داده های موجود، رادارهای خاص مورد استفاده در هر فصل و مکان (منطقه قطبی و قطب جنوب) برای هر فصل ارائه شده است. پنجره ترجیحی با استفاده از جعبه ابزار نقشه برداری MATLAB با GeoServer ارتباط برقرار می کند تا لیستی از تصاویر WMS موجود را برای مشاهده در منطقه انتخاب شده دریافت کند. پس از انتخاب در پنجره ترجیحی، پنجره نقشه راه اندازی می شود. داده های پنجره نقشه کاملاً توسط OPS GeoServer هدایت می شوند و از طریق ابزار درخواست WMS در جعبه ابزار نقشه برداری MATLAB قابل دسترسی هستند. قاب یک خط پرواز با کلیک بر روی پنجره نقشه انتخاب می شود. هنگامی که انتخابی در پنجره نقشه انجام می شود، پنجره انتخاب بارگیری می شود. اکوگرام راداری فریم داده انتخاب شده از سیستم فایل سرور بازگردانده و بارگذاری می شود، اما تمام نقاط لایه، اطلاعات لایه و لیست فریم ها در بخش با استفاده از API MATLAB از سرور OPS خارج می شوند. داده های اکوگرام راداری به دلیل حجم داده و نوع داده شطرنجی آن در پایگاه داده OPS ذخیره نمی شود. سپس کاربران Data Picker نقاط را در لایه های مختلف انتخاب می کنند و در نهایت این نقاط را در پایگاه داده فضایی OPS ذخیره می کنند. قاب یک خط پرواز با کلیک بر روی پنجره نقشه انتخاب می شود. هنگامی که انتخابی در پنجره نقشه انجام می شود، پنجره انتخاب بارگیری می شود. اکوگرام راداری فریم داده انتخاب شده از سیستم فایل سرور بازگردانده و بارگذاری می شود، اما تمام نقاط لایه، اطلاعات لایه و لیست فریم ها در بخش با استفاده از API MATLAB از سرور OPS خارج می شوند. داده های اکوگرام راداری به دلیل حجم داده و نوع داده شطرنجی آن در پایگاه داده OPS ذخیره نمی شود. سپس کاربران Data Picker نقاط را در لایه های مختلف انتخاب می کنند و در نهایت این نقاط را در پایگاه داده فضایی OPS ذخیره می کنند. قاب یک خط پرواز با کلیک بر روی پنجره نقشه انتخاب می شود. هنگامی که انتخابی در پنجره نقشه انجام می شود، پنجره انتخاب بارگیری می شود. اکوگرام راداری فریم داده انتخاب شده از سیستم فایل سرور بازگردانده و بارگذاری می شود، اما تمام نقاط لایه، اطلاعات لایه و لیست فریم ها در بخش با استفاده از API MATLAB از سرور OPS خارج می شوند. داده های اکوگرام راداری به دلیل حجم داده و نوع داده شطرنجی آن در پایگاه داده OPS ذخیره نمی شود. سپس کاربران Data Picker نقاط را در لایه های مختلف انتخاب می کنند و در نهایت این نقاط را در پایگاه داده فضایی OPS ذخیره می کنند. اما تمام نقاط لایه، اطلاعات لایه و لیست فریم ها در بخش با استفاده از API MATLAB از سرور OPS خارج می شوند. داده های اکوگرام راداری به دلیل حجم داده و نوع داده شطرنجی آن در پایگاه داده OPS ذخیره نمی شود. سپس کاربران Data Picker نقاط را در لایه های مختلف انتخاب می کنند و در نهایت این نقاط را در پایگاه داده فضایی OPS ذخیره می کنند. اما تمام نقاط لایه، اطلاعات لایه و لیست فریم ها در بخش با استفاده از API MATLAB از سرور OPS خارج می شوند. داده های اکوگرام راداری به دلیل حجم داده و نوع داده شطرنجی آن در پایگاه داده OPS ذخیره نمی شود. سپس کاربران Data Picker نقاط را در لایه های مختلف انتخاب می کنند و در نهایت این نقاط را در پایگاه داده فضایی OPS ذخیره می کنند.
4. ارزیابی سیستم
به منظور تأیید اینکه OPS در واقع به هدف ارائه یک تجربه بهبود یافته برای کاربران نهایی داده های سنجش از راه دور قطبی دست یافته است، OPS با سه سیستم موجود (GUI جستجوی جغرافیایی قدیمی در CReSIS، CReSIS FTP و NSIDC مقایسه شد. پورتال داده OIB). دستگاه سروری که OPS در حال حاضر روی آن کار می کند دارای یک پردازنده Dual Intel Xeon E5-2643 و 128 گیگابایت رم است.
هدف اصلی این ارزیابی نشان دادن استحکام OPS و بررسی مزایا و معایب آن در مقایسه با سایر سیستم های توزیع داده هنگام تکمیل یک کار معمولی است. در ارزیابی، از یک کاربر خواسته میشود که همان کار را در هر سیستمی که دادههای CReSIS L2 را در قالب CSV بر روی یک یخچال طبیعی خروجی شمال شرقی گرینلند (79 N) دانلود میکند، انجام دهد. کاربرانی که در ارزیابی شرکت کردند. نحوه استفاده از این سیستم ها به شرکت کنندگان آموزش داده شد و با استفاده از تمامی سیستم ها وظیفه فوق را محول کردند. ما از سه معیار کمی، یعنی زمان پردازش، تعداد ضربههای کلید و تعداد کلیکهای ماوس برای ارزیابی سیستمها استفاده کردیم.
مقادیر میانگین معیارها در شکل 9 نشان داده شده است، که نشان می دهد OPS سریع ترین زمان پردازش، کمترین تعداد کلیک ماوس و دومین کمترین تعداد ضربه زدن به کلید را دارد که نشان می دهد OPS به هدف ارائه یک تجربه بهبود یافته دست یافته است. کلیک ماوس و زدن کلید نشان دهنده سادگی رابط کاربری یک سیستم است. سیستمی که به کمترین تعداد از هر یک نیاز دارد، عموماً استفاده از آن سادهتر است. توجه داشته باشید که در حالی که CReSIS FTP کمترین تعداد ضربههای کلید را ثبت میکند، احتمالاً با کلیکهای ماوس جبران میشود، که دومین عدد در آن دسته است. در واقع، وقتی تعداد کلیکها و ضربههای کلید ترکیب میشوند، OPS کمترین تعداد کل را ثبت میکند، که نشان میدهد سیستم OPS نسبت به سایر سیستمها سادهتر است. مهمترین پیشرفت در OPS کارایی زمان پردازش در مقایسه با مراحل پیچیده شرح داده شده در آن استبخش 2.3 . این به این دلیل است که OPS می تواند پارامترهای مکانی-زمانی را در ابتدای بارگیری داده ها محدود کند و شاخص های پایگاه داده دسترسی به داده ها را تا حد زیادی سرعت می بخشد.
نتیجه اصلی حاصل از ارزیابی این است که OPS در مقایسه با سه سیستم دیگر برای دانلود داده های مورد نظر کارآمدتر و ساده تر است. شایان ذکر است که این نتایج نشاندهنده حالت ایدهآل یعنی استفاده بینقص از هر سیستمی است که کاربران قبلاً از طریق آموزشها و مستندات راهنما با سیستمها آشنا هستند. OPS شامل اسناد کمکی تعاملی است که آشنایی سریع با سیستم را برای کاربران جدید بسیار آسان می کند.
5. برنامه ای از داده های CReSIS که در OPS ارائه شده است
بخش های قبلی معماری و پیاده سازی سیستم OPS را معرفی می کند. محققان در جامعه کرایوسفر میتوانند دادهها را از ژئوپورتال OPS دانلود کرده و آن دادهها را در حوزههای مختلف تحقیقات علمی، از جمله سوالاتی در مورد افزایش سطح دریا، تغییرات آب و هوا و غیره اعمال کنند. در اینجا، ما برنامهای از دادههای CReSIS دانلود شده از ژئوپورتال OPS را برای درونیابی توپوگرافی یخچالهای طبیعی ارائه میکنیم. هنگامی که دادههای CReSIS از ژئوپورتال OPS دانلود میشود، ابتدا لازم است سیستم رادار، تاریخ شروع، تاریخ پایان، فصلها، چند ضلعی که منطقه مورد مطالعه را مشخص میکند، و یک قالب خروجی برای دادهها (CSV، KML، MAT، و NetCDF). محتوای یک فایل فرمت شده CSV در شکل 10 نشان داده شده است. این فایل حاوی اطلاعات زیر برای مسیر پرواز است: عرض جغرافیایی، طول جغرافیایی، زمان UTC، ضخامت، ارتفاع، اطلاعات قاب، ارتفاع لایه سطحی، ارتفاع لایه پایین، کیفیت انتخاب (1 نشان دهنده خوب، 2 نشان دهنده متوسط، 3 نشان دهنده مشتق شده ، و صفر است . نشان دهنده انتخاب نشده )، و اطلاعات فصل است.
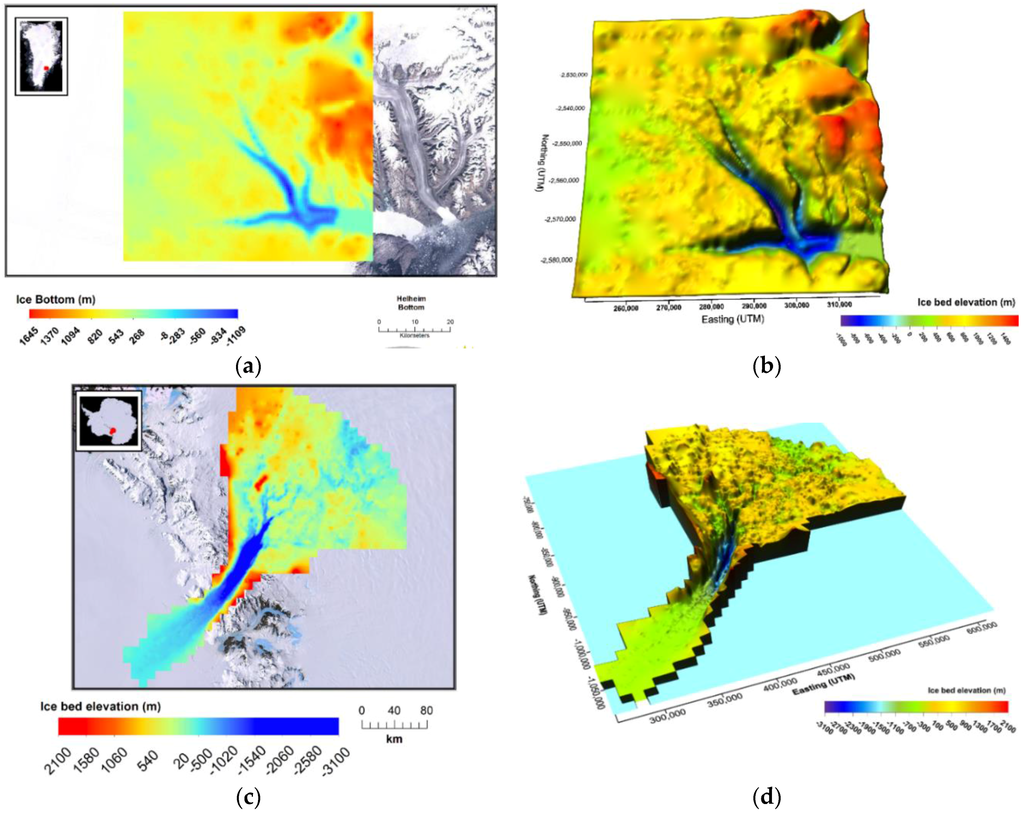
برای این کاربرد، دادههای با کیفیت خوب برای درونیابی سطح یخ استاندارد شده و شبکههای ارتفاع پایین و برای محاسبه یک شبکه ضخامت استفاده میشود. خروجی های اصلی سه لایه شطرنجی برای سطح یخ، ضخامت یخ و کف یخ هستند. فرآیند درون یابی در محیط ArcGIS [ 28 ] ModelBuilder برای سازماندهی ابزارها و داده های مورد استفاده و ایجاد ابزاری با کاربری آسان اجرا می شود. شکل 11مدل ابزار درونیابی داده های CReSIS را نشان می دهد. پس از دانلود دادههای CReSIS از ژئوپورتال OPS، ابتدا باید فایل CSV به شکل فایل نقطهای تبدیل شود و به عنوان «Flightlines Shapefile» با تعریف طرحریزی وارد ابزار شود. علاوه بر این، یک شکل فایل چند ضلعی که نمایانگر ناحیه مورد مطالعه است (“Study Area Shapefile”) باید تهیه شود که ناحیه ای را که قرار است درون یابی شود، تعریف می کند. برخی از روش های پیش پردازش مانند تبدیل فرمت، بافر کردن منطقه مورد مطالعه و غیره اجرا می شوند. “Surface Field” و “Bottom Field” ارتفاع سطح یخ و ارتفاع پایین در “Flightlines Shapefile” هستند. برای درونیابی لایه سطحی یخ، از تکنیک وزن دهی معکوس فاصله (IDW) استفاده می شود. برای درون یابی لایه پایین یخ، ابزار “Topo to Raster” در جعبه ابزار ArcGIS برای ایجاد ارتفاع پایین از نظر هیدرولوژیکی درست استفاده می شود. اگر اندازه ای متفاوت از 500 متر پیش فرض می خواهید، “اندازه سلول درون یابی” باید مشخص شود. صاف کردن سطح یخ و لایه های زیرین به نتایج درون یابی اعمال می شود. در نهایت، ما سه لایه اصلی (سطح، پایین، و ضخامت) را به عنوان فرمت ASCII و سایر خروجی ها به دست می آوریم. برای آزمایش و اعتبارسنجی توانایی و دقت این ابزار، یخچال های طبیعی هلهایم در گرینلند و یخچال بیرد در قطب جنوب درون یابی شدند و نشان داده شدند. Bottom, and Thickness) به عنوان فرمت ASCII و سایر خروجی ها. برای آزمایش و اعتبارسنجی توانایی و دقت این ابزار، یخچال های طبیعی هلهایم در گرینلند و یخچال بیرد در قطب جنوب درون یابی شدند و نشان داده شدند. Bottom, and Thickness) به عنوان فرمت ASCII و سایر خروجی ها. برای آزمایش و اعتبارسنجی توانایی و دقت این ابزار، یخچال های طبیعی هلهایم در گرینلند و یخچال بیرد در قطب جنوب درون یابی شدند و نشان داده شدند.شکل 12 . محصولات شبکه بندی نهایی برای یخچال های طبیعی در قطب شمال و قطب جنوب را می توان از https://data.cresis.ku.edu/ دانلود کرد .
6. نتیجه گیری
این کار توسعه یک زیرساخت رایگان و منبع باز را ارائه کرد، یعنی، OPS، برای ذخیره، مدیریت، تجزیه و تحلیل و توزیع داده های جمع آوری شده توسط CReSIS در تلاش برای جایگزینی روش های ذخیره سازی و توزیع داده های فعلی آن. در این سیستم، PostgreSQL، PostGIS و Django برای توسعه و استقرار یک سیستم مدیریت پایگاه داده استفاده شدند. ExtJS، GeoExt و OpenLayers برای توسعه و استقرار یک ژئوپورتال استفاده شدند. اسکریپت های متلب سفارشی و چارچوب وب جنگو پایتون برای استقرار یک API برای تعامل بین متلب و OPS استفاده شد. ارزیابی OPS حاکی از یک تجربه کاربری بسیار بهبود یافته برای بازیابی داده های جمع آوری شده توسط CReSIS است. این سیستم به دانشمندان اجازه می دهد و آنها را تشویق می کند تا داده ها را کاوش کنند و به طور بالقوه دانش علمی جدیدی را در تلاش برای درک کرایوسفر، صفحات یخی و افزایش سطح دریا در آینده ارائه دهند. به عنوان مثال، یک برنامه شبکهبندی با استفاده از دادههای CReSIS که از پورتال جغرافیایی OPS قابل دسترسی است نیز ارائه شد. محققان می توانند از این محصولات شبکه بندی و داده های L2 CReSIS برای پاسخ به سوالات مختلف تحقیقات علمی استفاده کنند.
OPS با استفاده از تمام FOSS توسعه یافته است و مطابق با داده های عملی و استانداردهای کدگذاری است. این سیستم در http://ops.cresis.ku.edu/ در دسترس عموم است و بسیاری از ارائه دهندگان داده های جامعه کرایوسفر مجموعه داده های خود را در OPS گنجانده اند یا در حال آماده سازی هستند. کد OPS منبع باز است و به صورت رایگان یا با محدودیت در GitHub در https://github.com/CReSIS ارائه شده است . به عنوان یک پروژه منبع باز، OPS تنها در صورتی موفق خواهد بود که جامعه به رشد آن کمک کند. برخی از احتمالات برای اکتشاف و توسعه آینده OPS عبارتند از:
-
میزبانی OPS مبتنی بر ابر در سیستم هایی مانند RACKSPACE یا Amazon EC2.
-
یک سیستم جمعآوری داده تعاملی (مبتنی بر وب) در جاوا اسکریپت ساخته شده تا جایگزین متلب Data Picker شود.
-
یک مرورگر تعاملی اکوگرام جاوا اسکریپت که داده های پویا را به جای تصاویر ثابت بارگیری می کند.
-
یک سیستم بارگذاری داده مبتنی بر وب به طوری که اعضای جامعه می توانند داده های خود را در یک سیستم ابری بدون دخالت CReSIS بارگذاری کنند.
-
همکاری بالقوه بین SDI قطب شمال ( http://arctic-sdi.org/ ) و OPS مانند با اشتراک گذاری داده ها بین سیستم ها و استفاده از OPS به عنوان قسمت جلویی SDI قطب شمال را بررسی کنید.
علاوه بر این، تعمیر و نگهداری و ارتقاء مداوم نرم افزار برای OPS نیز وظیفه ای است که باید در نظر گرفته شود. امیدواری نویسندگان این است که جامعه کرایوسفر سیستم را بپذیرد، از آن استفاده کند و به توسعه آینده آن کمک کند.
منابع
- هوگ گولدبرگ، او. برونو، جی اف تأثیر تغییرات آب و هوا بر اکوسیستم های دریایی جهان. Science 2010 , 328 , 1523-1528. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Hinzman، LD; بتز، ND; بولتون، WR؛ چاپین، FS; Dyurgerov، MB; Fastie، CL; گریفیث، بی. Hollister، RD; امید، ا. یوشیکاوا، ک. و همکاران شواهد و پیامدهای تغییرات آب و هوایی اخیر در شمال آلاسکا و سایر مناطق قطب شمال. صعود چانگ. 2005 ، 72 ، 251-298. [ Google Scholar ] [ CrossRef ]
- Mitrovica، JX; Tamisiea, ME; دیویس، جی ال. Milne، GA موازنه جرم اخیر صفحات یخی قطبی که از الگوهای تغییر سطح جهانی سطح دریا استنتاج شده است. طبیعت 2001 ، 409 ، 1026-1029. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- شپرد، ع. آیوینز، ای آر. گرو، ا. بارلتا، VR؛ بنتلی، ام جی; بتادپور، اس. بریگز، KH; برومویچ، دی اچ. فورسبرگ، آر. گالین، ن. و همکاران تخمین آشتیشده از توازن جرم لایههای یخ. Science 2012 ، 338 ، 1183-1189. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- گوگیننی، اس. یان، جی بی. پادن، جی. لوشن، سی. لی، جی. رودریگز مورالس، اف. براتن، دی. پوردون، ک. وانگ، ز. لیو، دبلیو. و همکاران توپوگرافی بستر Jakobshavn Isbræ، گرینلند، و Bird Glacier، قطب جنوب. جی. گلاسیول. 2014 ، 60 ، 813-833. [ Google Scholar ] [ CrossRef ]
- اشتاینیگر، اس. Hunter, AJ نرم افزار رایگان و متن باز GIS برای ساخت زیرساخت داده های مکانی. در Geospatial Free and Open Source Software in the 21st Century , 1st ed.; Erwan, B., Markus, N., Eds. Springer: برلین، آلمان، 2012; ص 247-261. [ Google Scholar ]
- عجمی، م. حمزه، م.ح. لبیاد، م. یرمانی، م. خترا، NB; الثبیطی، ع. محرم، IA; El Arrim، A. راه اندازی یک زیرساخت داده مکانی (SDI) برای شبکه ROSELT/OSS. جی. جئوگر. Inf. سیستم 2014 ، 6 ، 150-161. [ Google Scholar ] [ CrossRef ]
- بله، ZC; جابویدوف، م. درون، M.-H. van Westen، CJ نمونه اولیه یک پلت فرم پشتیبانی تصمیم مشارکتی مبتنی بر وب در مخاطرات طبیعی و مدیریت ریسک. ISPRS Int. J. Geoinf. 2015 ، 4 ، 1201-1224. [ Google Scholar ] [ CrossRef ]
- Sui, D. فرصت ها و موانع برای GIS باز. ترانس. GIS 2014 ، 18 ، 1-24. [ Google Scholar ] [ CrossRef ]
- سواین، NR; لاتو، ک. کریستنسن، SD; جونز، NL; نلسون، ای جی. ایمز، DP; Williams, GP مروری بر راه حل های نرم افزار منبع باز برای توسعه برنامه های کاربردی وب منابع آب. محیط زیست مدل. نرم افزار 2015 ، 67 ، 108-117. [ Google Scholar ] [ CrossRef ]
- گکاتزوفلیاس، دی. ملیوس، جی. ساماراس، ز. توسعه یک برنامه GIS وب برای تخصیص فضایی موجودی انتشار بر اساس ابزارهای نرم افزار منبع باز. محاسبه کنید. Geosci. 2013 ، 52 ، 21-33. [ Google Scholar ] [ CrossRef ]
- دلی پتروف، بی. جونوسکی، ا. Solomatine، DP توسعه یک برنامه وب برای منابع آب بر اساس نرم افزار منبع باز. محاسبه کنید. Geosci. 2014 ، 62 ، 35-42. [ Google Scholar ] [ CrossRef ]
- زاوالا-رومرو، او. احمد، ع. Chassignet، EP; زاوالا-هیدالگو، جی. Eguiarte، AF; Meyer-Baese, A. یک برنامه تحت وب جاوا منبع باز برای ساخت سایت های GIS وب مستقل. محیط زیست مدل. نرم افزار 2014 ، 62 ، 210-220. [ Google Scholar ] [ CrossRef ]
- کنسرسیوم فضایی باز KML. در دسترس آنلاین: http://www.opengeospatial.org/standards/kml (در 19 اوت 2015 قابل دسترسی است).
- کنسرسیوم فضایی باز مجموعه استانداردهای شبکه OGC Common Data Form (netCDF). در دسترس آنلاین: http://www.opengeospatial.org/standards/netcdf (در 19 اوت 2015 قابل دسترسی است).
- Kmoch، A. کلاگ، اچ. ریچی، AB; اشمیت، جی. White, PA یک رویکرد زیرساخت داده های مکانی برای توصیف سیستم های آب زیرزمینی نیوزلند. ترانس. GIS 2015 . [ Google Scholar ] [ CrossRef ]
- اشتاینیگر، اس. Hunter، AJ نقشه نرم افزار GIS رایگان و منبع باز 2012 – راهنمای تسهیل تحقیق، توسعه و پذیرش. محاسبه کنید. محیط زیست شهری. سیستم 2013 ، 39 ، 136-150. [ Google Scholar ] [ CrossRef ]
- کنسرسیوم فضایی باز در دسترس آنلاین: http://www.opengeospatial.org/ (در 19 آگوست 2015 قابل دسترسی است).
- سورگ، ج. Kunkel، R. مفهوم و اجرای یک سرویس مشاهده سنسور سازگار با OGC برای دسترسی استاندارد به داده های شطرنجی. ISPRS Int. J. Geoinf. 2015 ، 4 ، 1076-1096. [ Google Scholar ] [ CrossRef ]
- لیدیگ، ام. Teeuw, R. نرم افزار رایگان: بررسی، در زمینه مدیریت بلایا. بین المللی J. Appl. زمین Obs. Geoinf. 2015 ، 42 ، 49-56. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- PostgreSQL. در دسترس آنلاین: http://www.postgresql.org/ (دسترسی در 19 اوت 2015).
- PostGIS. در دسترس آنلاین: http://postgis.net/ (دسترسی در 19 اوت 2015).
- GeoServer. در دسترس آنلاین: http://geoserver.org/ (در 19 اوت 2015 قابل دسترسی است).
- Tait, MG پیاده سازی geoportals: کاربردهای GIS توزیع شده. محاسبه کنید. محیط زیست شهری. سیستم 2005 ، 29 ، 33-47. [ Google Scholar ] [ CrossRef ]
- ExtJS. در دسترس آنلاین: https://www.sencha.com/products/extjs/#overview (در 19 اوت 2015 قابل دسترسی است).
- GeoExt. در دسترس آنلاین: http://geoext.org/ (در 19 آگوست 2015 قابل دسترسی است).
- لایه های باز در دسترس آنلاین: http://openlayers.org/ (در 19 اوت 2015 قابل دسترسی است).
- ArcGIS. در دسترس آنلاین: https://www.arcgis.com/features/ (در 19 اوت 2015 قابل دسترسی است).

شکل 1. ( الف ) اکوگرام راداری سطح 1B (L1B) مرکز سنجش از دور صفحات یخی (CReSIS) با موقعیت آن (خط سبز در (b)) نشان داده شده در (b) نقشه مرجع گرینلند. ویژگی های اصلی بر روی اکوگرام رادار (a) برچسب گذاری شده است.

شکل 2. مجموعه نمونه ای از داده های CReSIS برای یک بخش جمع آوری داده. سه فایل (یک GPS، یک رکورد و یک فریم) دادههای مسیر پرواز را ذخیره میکنند، سه فایل (یک LayerData در هر فریم) لایههای دیجیتالی شده را ذخیره میکنند و حداقل سه فایل DATA (یکی در هر فریم در هر نوع پردازش) اکوگرامهای راداری را ذخیره میکنند. .

شکل 3. یک نمودار مفهومی از اجزای زیرساخت سرور قطبی باز (OPS).
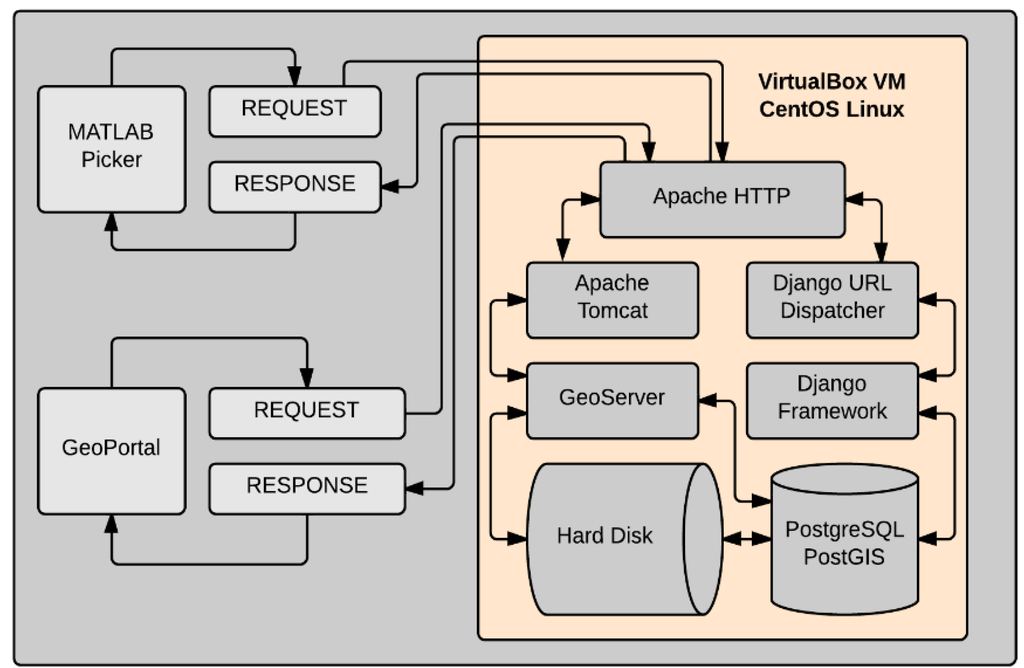
شکل 4. یک نسخه اصلاح شده از شکل 3 که نرم افزار انتخاب شده برای پر کردن هر نقش جزء OPS را نشان می دهد.
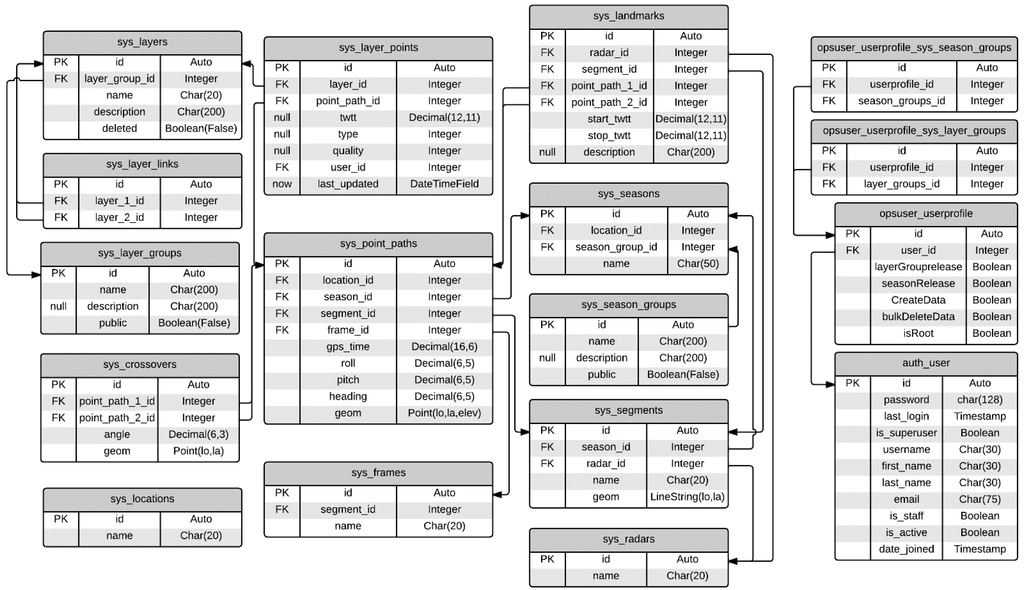
شکل 5. نمودار موجودیت-رابطه پایگاه داده فضایی OPS.
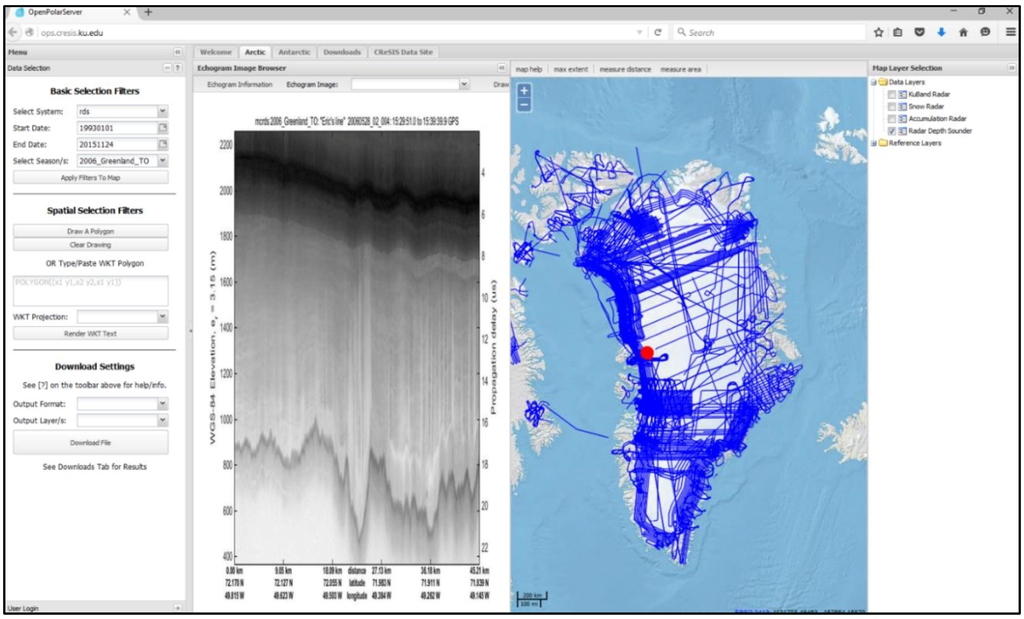
شکل 6. صفحه “Arctic” مشتری ژئوپورتال OPS. یک فریم rds انتخاب می شود (در نقشه با رنگ قرمز مشخص شده است) و اکوگرام مربوط به آن در سمت چپ نقشه نمایش داده می شود.

شکل 7. فهرست کامل نماهای OPS Django و شرح مختصری از هر کدام.
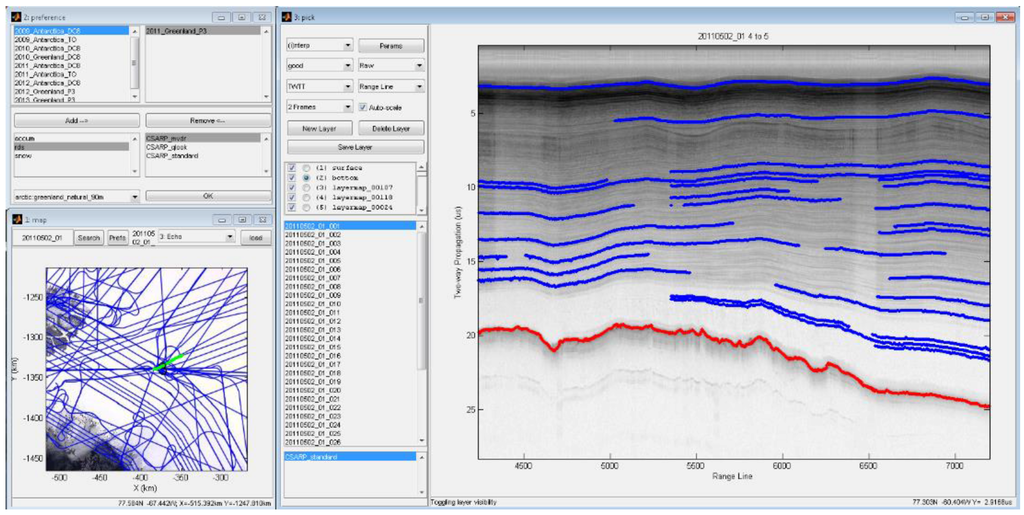
شکل 8. رابط کاربری CReSIS MATLAB Data Picker.

شکل 9. نتایج حاصل از مقایسه چهار سیستم توزیع داده (OPS، رابط کاربری گرافیکی جستجوی جغرافیایی قدیمی در CReSIS، CReSIS FTP، و پورتال داده NSIDC OIB). زمان پردازش، تعداد ضربه های کلید و تعداد کلیک های ماوس مورد نیاز برای دانلود مجموعه داده های مشابه برای هر سیستم نشان داده شده است.

شکل 10. اطلاعات داده های CReSIS در قالب CSV.
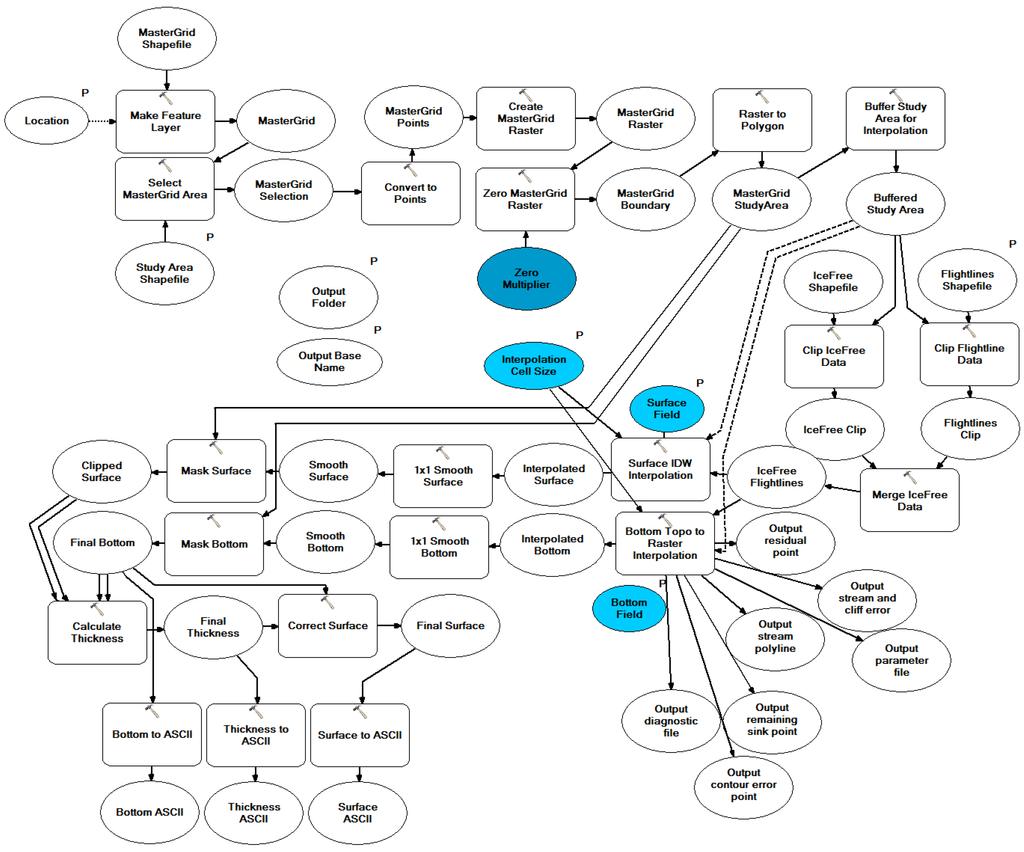
شکل 11. مدل ابزار درونیابی داده های CReSIS.

شکل 12. نقشه های ارتفاعی بستر یخی یخچال هلهایم در ( a ) 2-D و ( b ) 3-D. نقشه های ارتفاعی بستر یخی یخچال بیرد در ( c ) 2-D و ( d ) 3-D.

جدول 1. انتخاب نرم افزار منبع باز برای ساخت زیرساخت OPS.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons by Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر