1. مقدمه
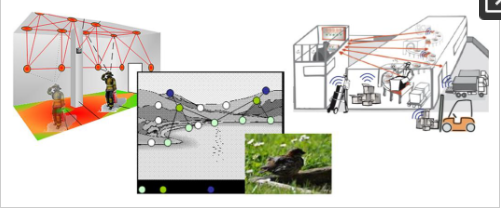
سیستم های موقعیت یابی محلی داخلی در سال های اخیر بسیار محبوب شده اند. مشابه تکامل سیستم های ارتباطی بی سیم، تنوع، عملکرد و عملکرد سیستم های محلی سازی داخلی در حال افزایش است. زمینه گسترده ای از قابلیت استفاده در سیستم های پزشکی، صنعتی، لجستیک، حمل و نقل و جمع آوری اطلاعات جغرافیایی امکان پذیر است ( شکل 1). با توجه به ابعاد کوچک سیستم، ردیابی افراد، حیوانات، کالاهای صنعتی، ماشین آلات و سایر تجهیزات تولیدی و همچنین نقشه برداری ساختمان ها از کاربردهای احتمالی سیستم ارائه شده می باشد. این سیستم برای جمع آوری اطلاعات موقعیت یابی در مناطق دشوار مانند غارها، شکاف ها و مناطق جنگلی متراکم که سیگنال GPS قادر به ارائه اطلاعات نیست، در دسترس است. به دلیل ساختار با قابلیت ارتباطی، سنسورهای رطوبت، دما، کیفیت هوا و …همچنین می تواند به سیستم اضافه شود. اطلاعات را می توان در سیستم جمع آوری کرد و از گره های حسگر به ایستگاه اصلی منتقل کرد. دادههای محلیسازی نه تنها به کاربردهای متنوع اجازه میدهند، بلکه به حسگرهای محلیسازی بسیار دقیق و کارآمد با حداقل هزینه و ساختاری بسیار یکپارچه نیز نیاز دارند. در این زمینه، رادار موج پیوسته مدوله شده با فرکانس (FMCW) بر اساس تکنیک اختلاف زمان رسیدن (TDOA) موقعیت یابی کارآمد و دقیق طیفی را امکان پذیر می کند. تعداد زیادی باند فرکانسی ISM (صنعتی، علمی و پزشکی) موجود است [ 1 ]. به منظور کاهش مشکلات تداخل احتمالی با سایر سیستمهای بیسیم، انتخاب باند کمتر شلوغ 24 گیگاهرتز ISM سودمند است.
شکل 1. تصویری از کاربرد احتمالی سیستم حسگر.
اگرچه عملکرد بالا یک عنصر کلیدی است، مصرف انرژی کم سیستم ها حتی بیشتر مورد توجه قرار می گیرد. برای دستیابی به اهداف بهره وری توان، ساختارها و اجزای سیستم جدید برای گره های حسگر ضروری است. کار ارائه شده بر روی تقاضای سیستم های حسگر کوچک و کم توان برای شبکه های موقت تمرکز دارد. سیستم و ویژگی های کلیدی آن ارائه شده است. پتانسیل های صرفه جویی در مصرف با مدارهای مجتمع خاص کاربردی (ASIC) در مثال سینت سایزر نشان داده شده است که جزء اصلی سیستم محلی سازی است.
2. بومی سازی با استفاده از زمان تفاوت ورود (TDOA)
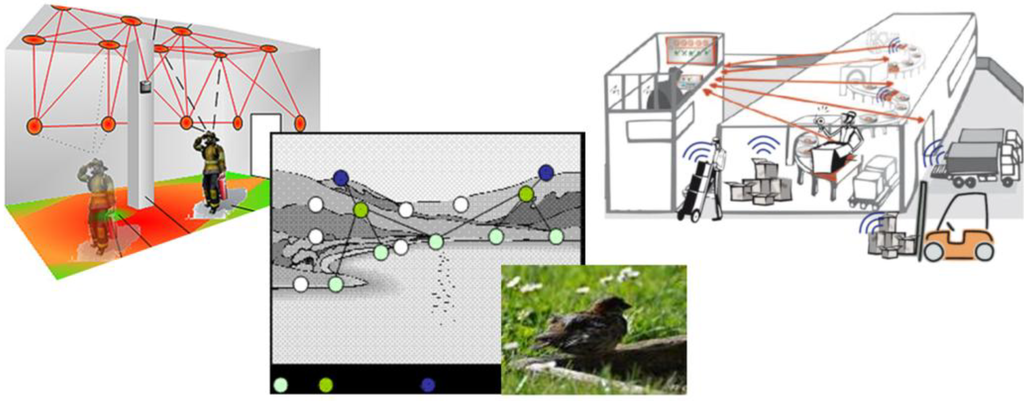
سیستم های محلی سازی مبتنی بر سیستم های ماهواره ای ناوبری جهانی (GNSS) مانند GPS به خوبی شناخته شده اند و در زندگی روزمره ما نفوذ کرده اند. این سیستم ها زمانی که در داخل ساختمان کار می کنند یا زمانی که به دقت محلی سازی بالاتری نیاز است به محدودیت های خود می رسند. در این سناریوها اپلیکیشن ها می توانند از استفاده از گره های حسگر بی سیم با قابلیت بومی سازی بهره مند شوند. شکل 2 یک مثال کاربردی معمولی را نشان می دهد. اتاق با یک دیوار از هم جدا شده است و مبلمان در حال بازتاب و جذب سیگنال هستند. ایستگاه های اصلی M1 و M2 در موقعیت های شناخته شده در داخل اتاق نصب شده اند. گره های N1 تا N4 اهداف متحرک هستند. از آنجایی که گره های حسگر می توانند فاصله گره های دیگر و تا ایستگاه اصلی را اندازه گیری کنند، موقعیت آنها در داخل اتاق قابل محاسبه است.
شکل 2. تصویر شبکه حسگر بی سیم با کاربردهای ممکن.
مدولاسیون فرکانس خطی سیگنال موج پیوسته یک رویکرد ایده آل برای محلی سازی در شبکه های حسگر بی سیم است. این مفهوم سیستم امکان محلی سازی دقیق با پیچیدگی مدار متوسط را فراهم می کند. برای ادغام سیستم های رادار در یک فناوری نیمه هادی مدرن، رویکرد راداری FMCW در مقایسه با رویکرد مبتنی بر رادار پالسی بسیار مناسب تر است. با تکنولوژی مدرن سیلیکون زیر میکرون عمیق، حداکثر توان خروجی قابل دستیابی سیگنال ارسال محدود است. بنابراین نسبت حداکثر به میانگین توان انتقال یک پارامتر حیاتی سیستم است. این نسبت در سیستم های FMCW به طور قابل توجهی بیشتر از سیستم های رادار پالس است. در نتیجه، محدوده بسیار بیشتری برای حداکثر توان انتقال یکسان به دست می آید. اجرای کم مصرف مدار RF و پردازش سیگنال آنالوگ برای سیستم های FMCW امکان پذیر است. علاوه بر این، وضوح فضایی قابل توجهی بالاتر در مقایسه با رادارهای پالسی با همان پیچیدگی مدار امکان پذیر است. پردازش سیگنال دیجیتال و تشخیص اشیاء منفرد با تبدیل فوریه سریع (FFT) انجام می شود و بنابراین با هزینه کم و مصرف انرژی کم در یک مدار مجتمع نیز قابل تحقق است.
جزء اصلی سیستم FMCW سینت سایزر فرکانس است که رمپ های فرکانس لازم را تولید می کند. فرکانس خروجی آنی سیگنال ارسالی f توسط فرکانس شروع f 0 و شیب µ رمپ فرکانس داده می شود که به پهنای باند B و زمان τ برای چیپ بستگی دارد:
برای محاسبه فاصله بین گره ها سیگنال های ارسالی و دریافتی با هم مخلوط می شوند. تفاوت فرکانس به طور مستقیم با فاصله بین گره های حسگر متناسب است.
برای تعیین موقعیت با استفاده از روش رفت و برگشت-زمان پرواز (RTOF) یا روش زمان ورود (ToA)، ایستگاه های پایه ثابت (BS) و ایستگاه های سیار (MS) باید با یکدیگر همگام شوند. هر چه دقت مورد نیاز بیشتر باشد، تقاضا برای همگام سازی مبانی زمانی برای همه شرکت کنندگان بیشتر است. روش TDOA مورد استفاده این مزیت را دارد که فقط BS باید با یکدیگر همگام شوند. هیچ هماهنگی بین MS و BS یا بین MS صورت نمی گیرد. MS سیگنالی را ارسال می کند که توسط چندین BS دریافت می شود. یک BS به عنوان یک گره مرجع برای سایر گره ها عمل می کند. برای تعیین موقعیت، زمان مطلق پرواز ضروری نیست. در عوض، تفاوت زمان پرواز بین i-th BS و BS مرجع برای محاسبه موقعیت استفاده می شود. اندازهگیریهای زمان انتشار سیگنال بین MS t’i و i- امین BS در یک گره مرکزی در زیرساخت، جایی که محاسبه موقعیت هر MS انجام میشود، دریافت میشود . هر اندازه گیری یک زمان t’i را ارائه می دهد که از زمان واقعی پرواز سیگنال t i و یک زمان آفست t Offset تشکیل شده است :
محاسبه اختلاف زمانی t 12 بین BS 1 و BS 2 بر اساس زمان اندازه گیری شده t’ 1 بین BS 1 و MS و از t’ 2 بین BS و MS 2 است . من برای همه BS یکسان است:
همگام سازی بین گره های ثابت به کار ارائه شده در [ 2 ] متکی است . مفهوم همگام سازی ساعت با دقت بالا بر مفهومی شبیه به اصل رادار استاندارد FMCW (موج پیوسته مدوله شده با فرکانس) متکی است و برای تخمین افست در زمان و فرکانس بین دو گره حسگر استفاده می شود.
3. طراحی سیستم
سیستم زیر بر روی یک گره حسگر فعال با قابلیت محلی سازی در 24 گیگاهرتز با پهنای باند چیپ 250 مگاهرتز تمرکز می کند. پهنای باند بالا در مقایسه با باند ISM 2.45 گیگاهرتز [ 3 ] یا 5.8 گیگاهرتز [ 4 ] از مزیت افزایش دقت و حساسیت کمتر به اثرات چند مسیره است. فصل زیر سیستم را قبل و بعد از طراحی سخت افزاری بهبود یافته مقایسه می کند، که برای رسیدن به اهداف کاهش اندازه و توان بدون افت دقت لازم است.
3.1. بررسی اجمالی سیستم
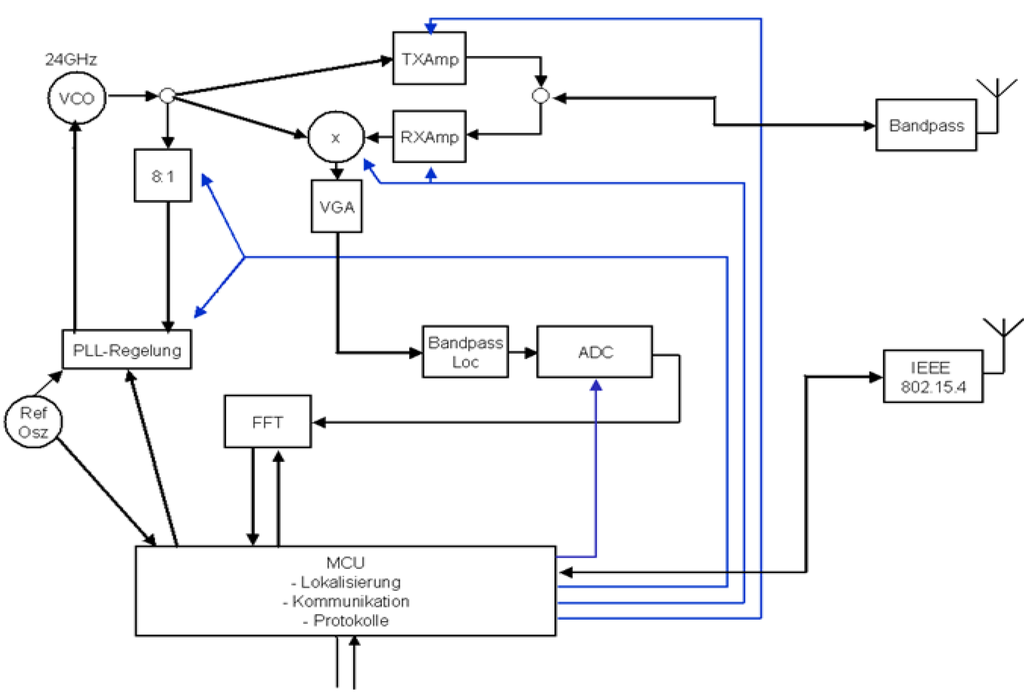
تمرکز سیستم ارائه شده ( شکل 3 ) بر روی یک سیستم حسگر بی سیم کوچک شده با محلی سازی در باند ISM 24 گیگاهرتز قرار دارد. یک اتصال بی سیم اضافی بین گره ها برای انتقال داده هاک نیز بخشی از سیستم است و تبادل اطلاعات بین گره های حسگر را ساده می کند. استفاده از باند ISM 24 گیگاهرتز از مشکلات تداخل در باندهای فرکانس پایین جلوگیری می کند. علاوه بر این، پهنای باند بالا برای مکانیابی رادار از نظر وضوح فضایی مفید است.
علاوه بر الگوریتمهای کارآمد برای محاسبه فاصله، این تحقیق بر روی اجزای جلویی با دقت بالا با یکپارچگی سیستم بالا در ترکیب با مصرف انرژی کم تمرکز دارد. مفهوم سینت سایزر Fractional-N مبتنی بر FMCW در مقایسه با سیستمهای مبتنی بر سینت سایزر دیجیتال مستقیم (DDS) انرژی کمتری دارد. مفهوم سینتی سایزر کلاسیک برای رمپ های فرکانس دقیق FMCW به مدار DDS برای تولید رمپ متکی است. این بلوک فرکانس مرجع متغیر زمانی را برای یک PLL عدد صحیح N ارائه می دهد. PLL به عنوان یک ضرب کننده فرکانس عمل می کند. در مفهوم ما از فرکانس مرجع ثابت استفاده شده است. صدای جیک فرکانس تنها با تغییر مداوم مقادیر تقسیم کننده فرکانس تولید می شود که توسط یک مدولاتور ΔΣ دیجیتال و یک ماشین حالت محدود اضافی کنترل می شود. DDS در مفهوم کلاسیک دارای مصرف برق حدود 400 مگاوات است. با مدارهای دیجیتال ذکر شده جایگزین می شود که تنها به 2 مگاوات از ریل تغذیه 1.5 ولت نیاز دارند. به همین دلیل مصرف برق سینت سایزر FMCW حدود 90 درصد کاهش می یابد.
شکل 3. شماتیک سیستم محلی سازی 24 گیگاهرتز پیشنهادی.
همگام سازی بین گره ها و اندازه گیری فاصله با یک رویکرد چند مرحله ای انجام می شود. جزئیات روش مورد استفاده در [ 5 ، 6 ، 7 ] نشان داده شده است.
3.2. مفهوم سینتی سایزر
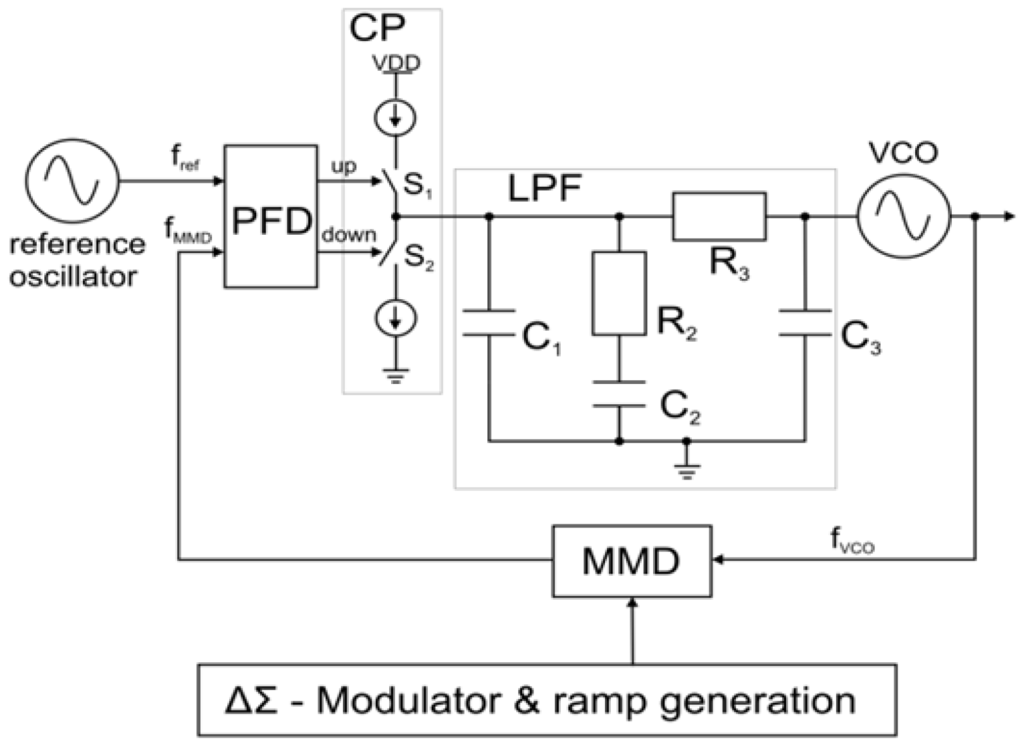
یک سینت سایزر با یک نوسان ساز کنترل شده با ولتاژ 24 گیگاهرتز (VCO) و یک حلقه قفل فاز (PLL) عنصر کلیدی گره حسگر است. VCO 24 گیگاهرتز مشارکت یک شریک در کنسرسیوم پروژه است. fractional-N PLL ( شکل 4 ) متشکل از آشکارساز فرکانس فاز (PFD) متصل به یک پمپ شارژ (CP)، یک حلقه فیلتر مرتبه سوم (LPF)، تقسیم کننده چند مدول (MMD) و یک بلوک ساختمانی دیجیتال شامل مدولاتور ΔΣ و یک ماشین حالت برای تولید رمپ.
شکل 4. شماتیک سینتی سایزر 24 گیگاهرتزی FMCW پیشنهادی.
3.2.1. آشکارساز فاز فرکانس
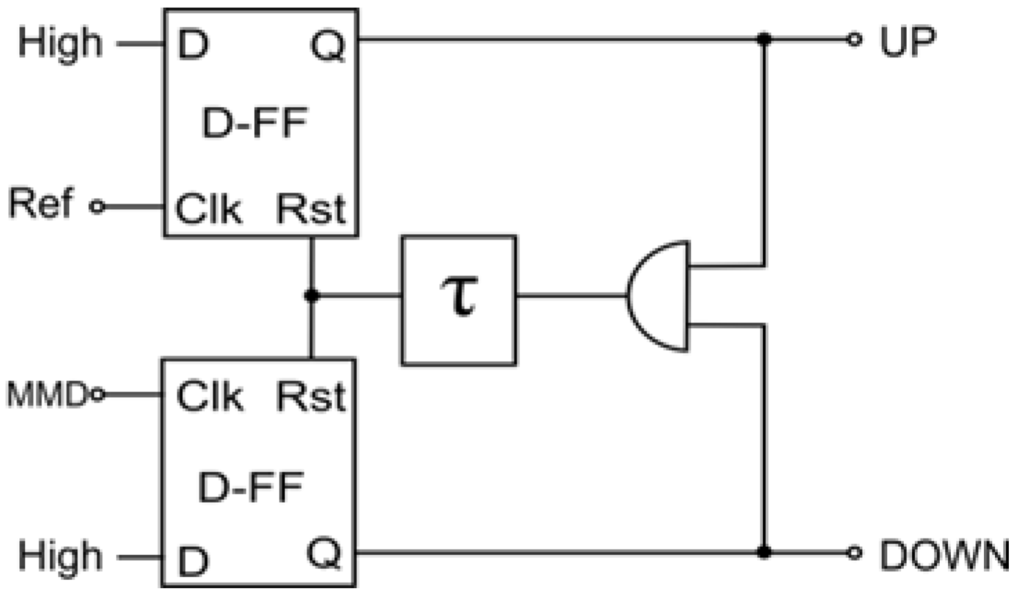
PFD فاز و فرکانس سیگنال VCO تقسیم شده را با فرکانس مرجع مقایسه می کند. بسته به انتقال سیگنال های ورودی، PFD پالس های UP و DOWN تولید می کند که منبع جریان پمپ شارژ (CP) را فعال می کند. شکل 5 مدار PFD را نشان می دهد که با دو فلیپ فلاپ D با راه اندازی لبه، یک گیت AND و یک تاخیر τ برای جلوگیری از منطقه مرده تحقق یافته است. ورودی های D D-FF ها به سطوح ورودی منطقی بالا گره خورده اند. فلیپ فلاپ ها به ترتیب توسط سیگنال خروجی MMD و ساعت مرجع کلاک می شوند. سیگنال های خروجی UP و DOWN به یک AND-gate منطقی متصل می شوند. نتیجه توسط عنصر تاخیر به تاخیر افتاده و سپس برای تنظیم مجدد هر دو فلیپ فلاپ استفاده می شود.
شکل 5. شماتیک آشکارساز فرکانس فاز.
3.2.2. پمپ شارژ
ساختار اصلی پمپ شارژ از دو ترانزیستور MOS به عنوان منبع جریان تشکیل شده است. این مفهوم دارای مغایرتها و تلورانسهای تطبیقی در طول ساخت مدار مجتمع است که منجر به عدم ایدهآلی میشود و عملکرد کلی سیستم را کاهش میدهد. مشکل دیگر، تغذیه ساعت از فرکانس مرجع است. این مشکل به ویژه در فرکانس های مرجع بالای 100 مگاهرتز شدید است. هر دو اثر منجر به افزایش اسپرز در طیف خروجی سینت سایزر می شود. تنها با طراحی بهبود یافته پمپ شارژ می توان به دقت مورد انتظار سیستم پی برد.
3.2.3. طراحی پمپ شارژ بهبود یافته
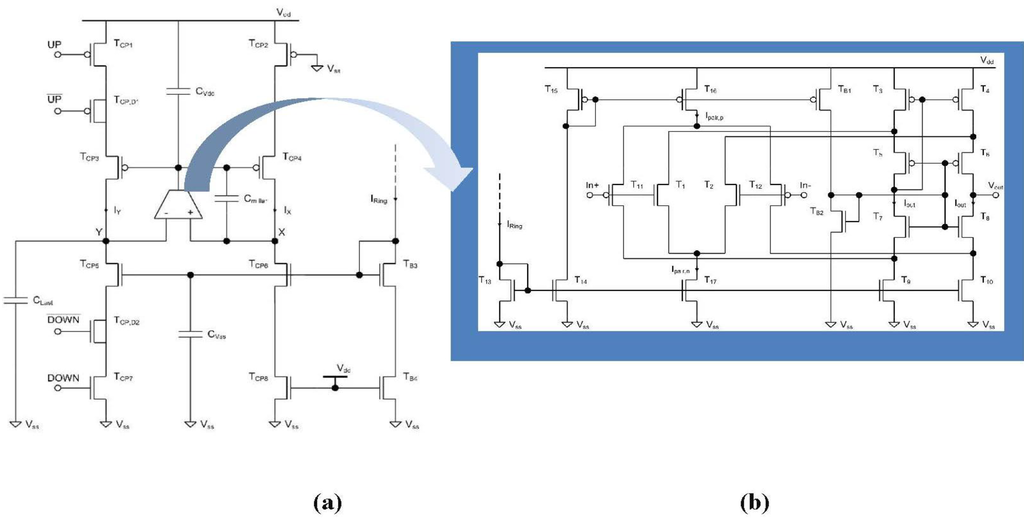
ساختار طراحی پمپ شارژ بهبود یافته در شکل 6 آورده شده است. این پمپ شارژ از ساختار اصلی با تغییر موقعیت ترانزیستورهای سوئیچینگ، یک تقویت کننده ترانس رسانایی و ترانزیستورهای اضافی T CP,D برای لغو تزریق بار تشکیل شده است [ 8 ]. ترانزیستورهای سوئیچینگ T CP1 و T CP7 روی ریل ها و ترانزیستورهای T CP3 و T CP5 قرار می گیرند.به عنوان منابع فعلی عمل کنند. ترانزیستورهای جبران شارژ بین سوئیچ ها و منابع جریان، تزریق شارژ از سوییچ ها به منابع جریان را جبران می کنند. یک سیگنال معکوس DOWN و UP برای هدایت ترانزیستورهای جبرانی ضروری است. این ساعت معکوس با توجه به تاخیر PFD بین سیگنالهای بالا و پایین معکوس و غیر معکوس برای دستیابی به دو سیگنال ساعت غیر همپوشانی ایجاد میشود. با استفاده از این ترانزیستورها، می توان به میزان قابل توجهی جریان ساعت را در سرعت های کلاک مرجع بالا کاهش داد.
یکی دیگر از پیشرفت های این ساختار استفاده از تقویت کننده ترانس رسانایی عملیاتی (OTA) برای تنظیم عدم تطابق جریان بین منابع جریان UP و DOWN است. OTA در یک حلقه بازخورد بین گره خروجی Y و گره مرجع X در ورودی و دروازه ترانزیستورهای منبع جریان T CP3 و T CP4 قرار می گیرد. گره X مرجع ولتاژ خروجی است. حلقه بازخورد تضمین می کند که I CP4 همیشه برابر با I CP3 و در نتیجه جریان خروجی پمپ شارژ است. بدین ترتیب می توان از ولتاژ منبع تخلیه یکسان در سرتاسر منابع جریان اطمینان حاصل کرد و عدم تطابق جریان بین منابع UP و DOWN را به حداقل رساند.
شکل 6. ( الف ) ساختار پمپ شارژ بهبود یافته. ( ب) و تقویت کننده ترانس رسانایی عملیاتی مورد استفاده (OTA).
ساختار تقویت کننده ترانس رسانایی عملیاتی در شکل 6 ب نشان داده شده است. یک مرحله ورودی دیفرانسیل ریل به ریل استفاده می شود. یک محدوده ولتاژ ورودی بالا لازم است تا اطمینان حاصل شود که محدوده ولتاژ خروجی پمپ شارژ توسط OTA محدود نمی شود. برای رسیدن به بهره لازم برای تنظیم سریع اختلاف ولتاژ بین گرههای X و Y، مرحله خروجی OTA با یک مرحله کاسکد تا شده محقق میشود. برای بایاسینگ ترانزیستورهای کاسکد از ماسفت T B2 در اتصال دیود استفاده می شود. سایر ساختارهای بایاس نیز امکان پذیر است، اما برای این استفاده، تغییر بهره ناشی از تغییرات فرآیند قابل تحمل است [ 9 ]. خازن های C Vss و C Vddبرای تثبیت گیت های منابع جریان در برابر افت سریع ولتاژ ناشی از اثرات سوئیچینگ استفاده می شود. آسیاب خازنی C بخشی از OTA است و برای تثبیت حلقه بازخورد ضروری است. با استفاده از خازن آسیاب، نمودار قطب صفر تغییر می کند و پایداری در محدوده فرکانس مورد نظر تضمین می شود.
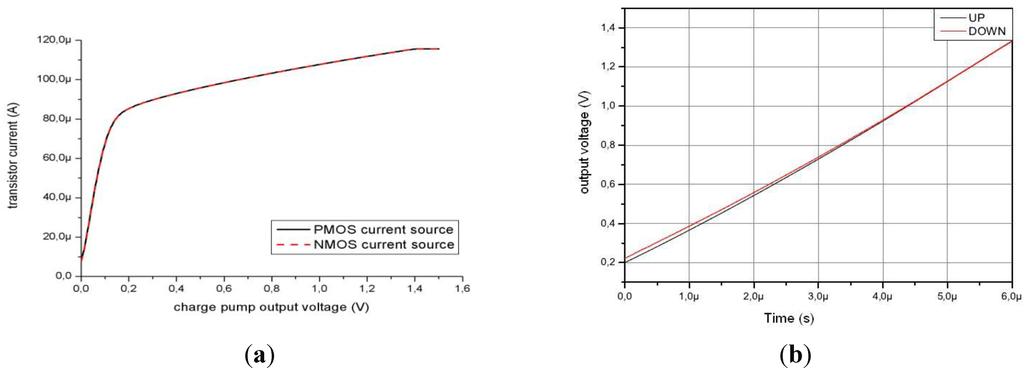
شکل 7 a دو جریان PMOS و NMOS تنظیم شده را در یک تغییر ولتاژ خروجی از 0 تا 1.5 ولت نشان می دهد. در مقایسه با طرح اصلی، دو جریان مطابقت دارند و جریان PMOS به طور مساوی از جریان NMOS پیروی می کند. حداکثر عدم تطابق جریان در طراحی جدید کمتر از 1٪ برای محدوده ولتاژ خروجی از 0.1 ولت تا 1.3 ولت است. محدوده ولتاژ خروجی طرح پمپ شارژ بهبودیافته 94 درصد از منبع تغذیه 1.5 ولت را پوشش می دهد در حالی که طراحی معمولی تنها 38 ولت را ارائه می دهد. درصد از محدوده عرضه شکل 7b رمپ افزایش ولتاژ را از 0.2 ولت به 1.3 ولت نشان می دهد که در حالی ایجاد می شود که جریان بالا به طور دائم شارژی را به مدت 6 میکرو ثانیه به فیلتر حلقه تزریق می کند. سطح شیب دار از 0 ثانیه شروع می شود و در 6 میکرو ثانیه به پایان می رسد. رمپ پایین نیز نشان داده شده است. از 6 میکرو ثانیه شروع می شود و در 0 ثانیه به پایان می رسد. این کار مقایسه مجموع اختلاف ولتاژ تولید شده توسط عدم تطابق جریان بسیار کوچک را آسان تر می کند.
شکل 7. ( الف ) عدم تطابق جریان بهبود یافته. ( ب ) ولتاژ خروجی در رمپ بالا و پایین.
3.2.4. فیلتر حلقه
اگر اسپرزهایی که باید فیلتر شوند بیش از ده برابر پهنای باند حلقه باشند، یک فیلتر مرتبه سوم می تواند مزایای بیشتری را ارائه دهد. طراحی یک فیلتر حلقه غیرفعال شامل حل ثابت های زمانی و سپس تعیین اجزای فیلتر حلقه از ثابت های زمانی است. امپدانس فیلتر حلقه به صورت زیر است:
با ثابت های زمانی T 1 – T 3 و عوامل A 0 – A 2 داده شده در [ 10 ]، پارامترهای مؤلفه را می توان به صورت زیر محاسبه کرد:
3.2.5. تقسیم کننده فرکانس
تقسیم کننده فرکانس باید سیگنال 24 گیگاهرتز VCO ورودی را تقسیم کند تا آن را با فرکانس مرجع مقایسه کند. ساختار تقسیم کننده برای PLL تحقق یافته شامل یک پیش مقیاس کننده با ضریب تقسیم دائمی S = 8 و یک تقسیم کننده چند مدول (MMD) [ 11 ] با پنج بیت کنترل است. اینها را می توان برای تغییر ضریب تقسیم MMD تغییر داد. معماری عمومی MMD شامل تعدادی سلول تقسیم بر 2/3 است. معماری نشان داده شده به نسبت تقسیم N از،
که در آن R 0 ، R 1 ، …، Rn- 2 ، Rn – 1 بیت های کنترل قابل برنامه ریزی هستند. با توجه به پیش مقیاس کننده با تقسیم استاتیک و فرکانس مرجع 128 مگاهرتز، یک MMD با پنج سلول تقسیم بر 2/3 ضروری است. ضریب تقسیم 16 تا 31 در MMD را می توان با پنج بیت کنترل کننده بدست آورد. ساختار MMD در منطق CMOS طراحی شده است و توان کل 3.4 مگاوات مصرف می کند. پیش مقیاس کننده برای تقسیم از 24 گیگاهرتز به 3 گیگاهرتز در منطق ساعت تک فاز واقعی (TSPC) [ 12 ] برای رسیدن به سرعت و توان مورد نیاز طراحی شده است و تنها 14 مگاوات از ولتاژ تغذیه 1.5 ولت مصرف می کند.
3.2.6. تقسیم کننده فرکانس ایستا مبتنی بر TSPC جدید
مهمترین بخش در زنجیره تقسیم کننده مرحله اول است که باید در بالاترین فرکانس ورودی کار کند. بهبود سرعت در مدارهای دیجیتال CMOS نه تنها با مقیاس بندی به طول کانال کوتاه تر، بلکه با تکنیک های مدار بهبود یافته نیز حاصل می شود. اگر هیچ محدودیتی در مصرف برق وجود نداشته باشد، استفاده از تقسیمکنندههای مبتنی بر منطق حالت جریان (CML) رایج است. توپولوژی یک مدار تقسیم بر دو استاتیک در CML در [ 13 ] توضیح داده شده است. این بر اساس فلیپ فلاپهای راهاندازی لبه در فرم بازخورد منفی، شبیه به ساختار CMOS است. برای غلبه بر مشکلات طراحی CML، یک تکنیک کلاکینگ تک فاز به نام TSPC (ساعت تک فاز واقعی) اهمیت پیدا می کند.
منطق TSPC بر اساس اصل مراحل پیش شارژ و ارزیابی است [ 14]. وقتی ساعت کم است، بخش N در حالت پیش شارژ است. این امر تغییر سریعتر خروجی بلوک های منطقی ترانزیستور P را تضمین می کند. پیش شارژ با لبه ساعت در حال افزایش و ارزیابی با لبه ساعت در حال سقوط انجام می شود. این پیش شارژ سرعت ساختار TSPC را افزایش می دهد و آن را به یک مفهوم خوب در ده ها گیگاهرتز تبدیل می کند. بر اساس مفهوم طراحی یک فلیپ فلاپ D به عنوان تقسیم کننده استاتیک می توان آن را در ساختار TSPC طراحی کرد. اولین گام، انتقال اصل عملکردی یک فلیپ فلاپ به ساختار طراحی TSPC است. در این مدار از یک n-latch و سپس یک p-latch استفاده می شود و یک مرحله سوم برای ارزیابی خروجی مورد نیاز است. در اینجا یک مرحله اینورتر نشان دهنده مرحله سوم است. با استفاده از این سه مرحله و همچنین بازخورد از خروجی به ورودی، رفتار ساختار استاتیک تقسیم بر دو قابل درک است. با فرض اینکه سیگنال ورودی D در GND باشد، گره X1 به VDD شارژ می شود. به دلیل این شارژ، ترانزیستور PMOS زیر چفت دوم خاموش می شود. اکنون مقدار گره X2 به سیگنال ساعت بستگی دارد. اگر سیگنال ساعت در حال سقوط باشد، اطلاعات X2 ذخیره می شود. اگر سیگنال ساعت در حال افزایش باشد، گره X2 در GND خواهد بود و X3 سیگنال قبلی را نگه می دارد. گره Y3 به دلیل تغییر X2 روی VDD شارژ می شود. این امکان تغییر سریعتر خروجی را در چرخه ساعت بعدی فراهم می کند. بازخورد خروجی X3 به ورودی های D موقعیت پایدار D-FF را تا زمانی که سیگنال ساعت تغییر کند تضمین می کند. سقوط سیگنال ساعت باعث می شود که گره X1 از VDD به GND تغییر وضعیت دهد. این تغییر پتانسیل بر دومین چفت و تغییر گره X2 از GND به VDD تأثیر می گذارد. سیگنال خروجی از VDD به GND تبدیل میشود و به دلیل بازخورد روی اولین لچ تأثیر میگذارد. اکنون اولین لچ گره X1 را دوباره به VDD شارژ می کند و روش توصیف شده دوباره شروع می شود. به دلیل این رفتار فرکانس سیگنال ساعت ورودی به نصف کاهش می یابد. آبشاری منطق NMOS و PMOS و تعداد عجیبی از مراحل برای اطمینان از عملکرد صحیح ضروری است.
برای طرح های پیشنهادی، یک تقسیم کننده ساعت تک فاز واقعی توسعه یافته (E-TSPC) به جای تقسیم کننده TSPC توضیح داده شده برای کاهش تاخیر RC و افزایش سرعت سازه استفاده می شود [ 15 ]. عملکرد ساختار E-TSPC مشابه ساختار TSPC است، اما مدار به حداقل ترانزیستورهای لازم کاهش می یابد ( شکل 8 ب). به دلیل جریان های نشتی در فلیپ فلاپ های E-TSPC، اندازه گیری صحیح عرض ترانزیستورها در هر مرحله بسیار مهم است. نسبت بین ترانزیستورهای NMOS و PMOS با استفاده از مقیاس بندی منطقی کلاسیک دومینو [ 16 ] به دست می آید. فقط برای این مقیاس ترانزیستور می توان از تصمیم درست سیگنال هر مرحله و رفتار کلی سیستم اطمینان حاصل کرد.
شکل 8. ( الف ) ساعت تک فاز واقعی (TSPC) مبتنی بر D-FF. ( ب ) ساعت تک فاز واقعی توسعه یافته (E-TSPC) مبتنی بر D-FF.
4. نمونه اولیه و آزمایش
سیستم ارائه شده از نظر قابلیت بومی سازی و دقت، یکپارچگی سیستم و مصرف انرژی کم تست شده است. اولین مرحله تأیید، اثبات مفهوم است. این با نمایش سیستم بر اساس آخرین اجزای سیستم [ 17 ] انجام می شود. اولین مفهوم سیستم با اجزای با دقت بالا توانایی پوشش فاصله اندازه گیری 70-80 متر با عدم قطعیت اندازه گیری کمتر از 2 سانتی متر را نشان می دهد. شکل 9 a فاصله در میدان دور را در مقایسه با اندازه گیری مبتنی بر لیزر نشان می دهد و شکل 9 b خطای فاصله را در فاصله کمتر از 1 متر نشان می دهد. نقطه ضعف نسل اول اندازه آن بود، همانطور که در شکل 10 نشان داده شده استالف و مصرف برق آن با اولین کار روی یکپارچه سازی سیستم، مصرف انرژی و اندازه به طور قابل توجهی کاهش یافت.
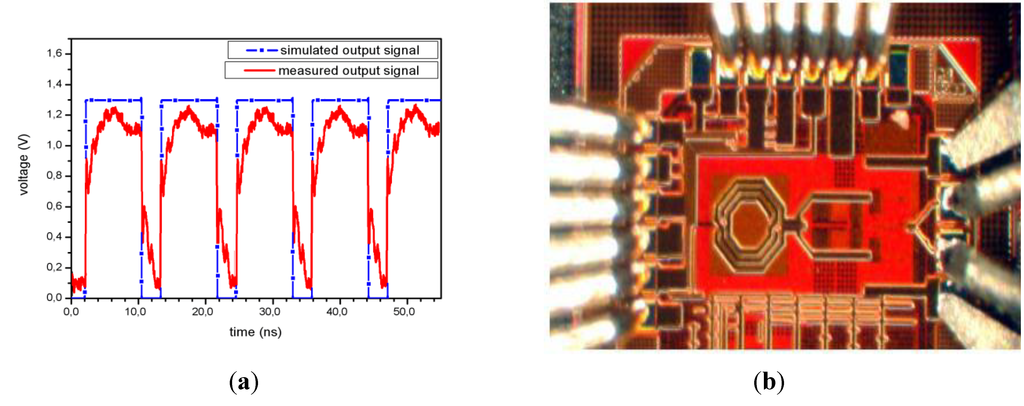
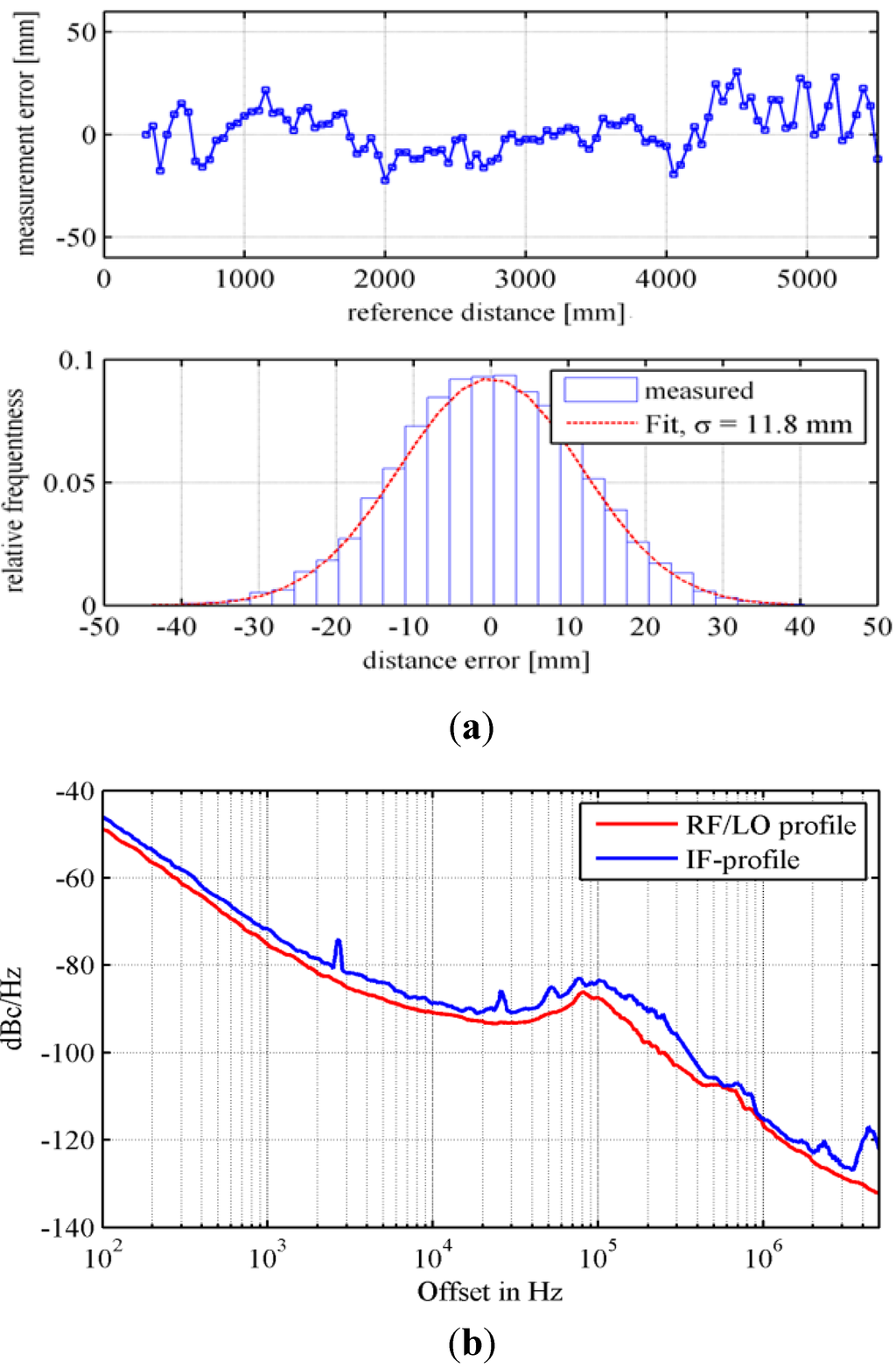
سیستم نسل دوم بر کوچک سازی و کاهش توان تمرکز دارد. سینت سایزر به عنوان جزء اصلی فرستنده گیرنده می تواند به اندازه کمتر از 1 سانتی متر مربع با توان مصرفی کمتر از 40 میلی وات در کل و فاصله اندازه گیری مورد انتظار تا 20 متر برسد. PLL خود تنها 10 مگاوات مصرف می کند که دلیل آن مفهوم جدید تقسیم کننده بر اساس تکنیک ساعت تک فاز واقعی است. تقسیم کننده در PLL از یک مرحله تقسیم کننده CML ایستا به دنبال مراحل TSPC و یک تقسیم کننده چند مدول CMOS تشکیل شده است. نتایج اندازه گیری تقسیم کننده TSPC در شکل 11تقسیم سیگنال 22 گیگاهرتز را نشان می دهد. حداکثر فرکانس ورودی 24 گیگاهرتز با نسل سوم و نسل جدید PLL انتظار می رود. بنابراین سیستم نسل دوم از یک VCO تجاری 24 گیگاهرتز و پیش مقیاس کننده برای تأیید آن استفاده می کند. نتایج اندازه گیری برای سیستم نسل دوم در شکل 12 نشان داده شده است. خطای نسل دوم بدتر از نسل اول است. این به دلیل کاهش اندازه و کاهش قدرت انتظار می رفت. تمام اندازه گیری ها در داخل آزمایشگاه با دیوارهای بتنی و تجهیزات اندازه گیری زیادی انجام شد. این سناریو را می توان بدترین حالت را به دلیل وجود سیگنال غیر خط دید زیاد اعلام کرد. دقت بهتری در صنعت با فضای دیوار وسیع تر و ساختمان های بیرونی انتظار می رود.
شکل 9. ( الف ) فاصله در مقایسه با فاصله لیزر. ( ب ) خطای اندازه گیری در فاصله 1 متری.
شکل 10. ( الف ) سنسور نسل اول و دوم. ( ب ) سیستم اندازه گیری.
شکل 11. ( الف ) خروجی اندازه گیری و شبیه سازی شده فرکانس تقسیم کننده. ( ب ) میکروعکس از تراشه سینت سایزر یکپارچه.
شکل 12. ( الف ) دقت فاصله و ( ب ) نویز فاز نسل دوم سینت سایزر 24 گیگاهرتز.
5. نتیجه گیری ها
در این مقاله یک سیستم محلی سازی کم مصرف ارائه شده است. مفهوم سیستم بر اساس اصل TDOA برای محلی سازی است و علاوه بر این دارای ویژگی ارتباط بین گره های حسگر است. تشخیص گره های حسگر استاتیک و متحرک در حالت موقتشبکه با این مفهوم سیستم امکان پذیر است. هدف سیستم مصرف انرژی کم و اندازه سیستم کوچک در ترکیب با محلی سازی گره بسیار دقیق است. اجزای سخت افزاری کم توان کوچک شده جدید در این مقاله ارائه شده است. نشان داده شده است که طراحی سینت سایزر با PLL کسری-N با توان کم برای اندازهگیری دقیق فاصله FMCW امکان پذیر است. سینت سایزر 24 گیگاهرتز کمتر از 40 میلی وات مصرف می کند. بنابراین هدف سیستم برای مصرف برق کمتر از 100 مگاوات برآورده شده است و دقت محلی سازی کمتر از 2 سانتی متر به دست آمده است.











بدون نظر