

خلاصه
جمعآوری دادههای مکانی یک فرآیند حیاتی برای شناسایی خط ساحلی و مناطق ساحلی برای دانشمندان درگیر در مطالعه مورفولوژی ساحلی است. در دسترس بودن مدلهای سطح دیجیتال با وضوح بسیار بالا (DSM) و نقشههای ارتوفتو مورد توجه همه دانشمندان است، بهویژه دانشمندانی که تغییرات کوچک در سطح زمین، مانند مورفولوژی خط ساحلی را رصد میکنند. در این مقاله، ما روشی را برای به دست آوردن و پردازش دادههای با وضوح بالا برای مناطق ساحلی ارائه میکنیم که توسط یک هواپیمای بدون سرنشین (UAV) وصل شده به یک دوربین تجاری کوچک (VTOL) عمودی به دست آمده است. روش پیشنهادی الگوریتم های بینایی کامپیوتری را برای نمایش سه بعدی با تکنیک های پردازش تصویر برای تجزیه و تحلیل یکپارچه می کند. الگوریتمهای بینایی کامپیوتری ساختار را از رویکرد حرکت (SfM) استفاده کردند در حالی که تکنیکهای پردازش تصویر از تحلیل تصویر مبتنی بر شی جغرافیایی (GEOBIA) با طبقهبندی فازی استفاده کردند. خط لوله SfM برای ساخت DSM ها و ارتفتوها با دقت اندازه گیری به ترتیب سانتی متر استفاده شد. در نتیجه، GEOBIA برای ایجاد اشیاء با گروه بندی پیکسل هایی که ویژگی های طیفی یکسانی داشتند و استخراج ویژگی های آماری از آنها استفاده شد. اشیاء تولید شده توسط طبقه بندی فازی با استفاده از ویژگی های آماری به عنوان ورودی طبقه بندی شدند. کلاسهای خروجی طبقهبندی شامل ترکیب ساحل (شن، قلوه سنگ و سنگ) و کلاسهای زیرسطحی (علفزار، ماسه، جلبک و سنگ) بود. این روش برای دو مطالعه موردی مناطق ساحلی با ترکیبات مختلف اعمال شد: یک ساحل شنی با چهره ای بزرگ و یک ساحل شنی با چهره ای کوچک. هر دو توسط فرسایش ساحل تهدید می شوند و در اثر طوفان های دریایی تخریب شده اند. نتایج نشان میدهد که خط ساحلی، که حد پایین منطقه swash است، توسط نمایشهای سهبعدی و طبقهبندی تصویر با موفقیت شناسایی شد. علاوه بر این، چندین اثر نشاندهنده حالتهای دریایی قبلی در مورد ساحل شنی با موفقیت شناسایی شد، در حالی که فرسایش و تاجهای ساحل در مورد ساحل قلوه سنگ شناسایی شدند. سطح به دست آمده از جزئیات نمایش های سه بعدی ویژگی های ساحلی جدیدی را نشان داد، از جمله تاج های فرسایش، مناطق برم و تپه های شنی. در نتیجه، گردش کار پهپاد SfM اطلاعاتی را با وضوح فضایی فراهم می کند که امکان مطالعه تغییرات ساحلی را با اطمینان فراهم می کند و تجسم سه بعدی دقیقی از مناطق ساحلی را حتی برای مناطقی با توپوگرافی پیچیده ارائه می دهد. نتایج کلی نشان می دهد که روش ارائه شده یک ابزار قوی برای طبقه بندی، تجسم سه بعدی و نقشه برداری مورفولوژی ساحلی است.
کلید واژه ها:
جمع آوری داده های پهپاد ; نقشه برداری سواحل ; ساختار از حرکت ; جوبیا _ ژئو تجسم سه بعدی ؛ مدل سطح دیجیتال
1. معرفی
نظارت بر مناطق ساحلی یک وظیفه مهم در حفاظت از محیط زیست است، در حالی که تشخیص خطوط ساحلی برای مدیریت ساحلی اساسی است [ 1]]. مدیریت سواحل به اطلاعات دقیق بهروز نیاز دارد، زیرا حرکتهای ساحلی در ارزیابی فرسایش سواحل اهمیت اولیه دارند. سنجش از دور نقش مهمی در رصد سواحل ایفا می کند زیرا یکی از با ارزش ترین ابزارهای مورد استفاده برای شناسایی و پایش خطوط ساحلی است. قلمرو این مقاله تشخیص خط ساحلی و شناسایی مناطق خط ساحلی با استفاده از تجزیه و تحلیل تصویر مبتنی بر شی جغرافیایی (GEOBIA) برای عکسهای ارتوفوژ با وضوح بالا تولید شده توسط یک وسیله نقلیه هوایی بدون سرنشین (UAV) همراه با ساختاری از حرکت (SfM) است. الگوریتم، و برای بازسازی مناطق مورد مطالعه در یک نمایش سه بعدی (3D) برای بررسی اینکه آیا سایر ویژگیهای ساحل، مانند مناطق swash، خطوط شکسته، و مناطق برم قابل شناسایی هستند یا خیر.
اگرچه وضوح فضایی تصاویر ماهواره ای در دهه گذشته به طور قابل توجهی بهبود یافته است، اما داده های جمع آوری شده هنوز برای تغییرات ساحلی متوسط تا کوچک (دقت سانتی متری) کافی نیست. برعکس، پهپادها در ترکیب با SfM که خط لوله پهپاد-SfM نیز نامیده میشود، میتوانند اطلاعات با وضوح بالا را با هزینه کم برای یک منطقه کوچک ارائه دهند [ 2 ، 3 ]. کوچکسازی حسگرها و افزایش قابلیتهای پرواز و چابکی پهپادها، و همچنین ابزارهای تصویربرداری با کیفیت بالا که در دسترس هستند، ترکیب شدهاند تا یک ابزار جمعآوری دادههای مکانی برای نظارت بر محیطزیست تولید کنند [4، 5 ، 6 ] .]. چندین نشریه اخیر روش ها و تکنیک هایی را توصیف کرده اند که تغییرات در مناطق مورفولوژی ساحلی را با استفاده از پهپادها اندازه گیری می کنند [ 4 ، 7 ، 8 ]. در حال حاضر، پهپادها گزینه مناسبی برای جمع آوری داده های سنجش از دور برای طیف گسترده ای از کاربردهای عملی، از جمله کاربردهای علمی، کشاورزی و زیست محیطی هستند [ 4 ، 6 ، 8 ، 9 ، 10 ، 11 ، 12 ، 13 ، 14 ، 15 ، 16 ، 17 ، 18] سیستم های هوایی بدون سرنشین (UAS) که از یک پهپاد و یک حسگر تشکیل شده اند، تصاویر دیجیتالی با وضوح مکانی و زمانی ارائه می کنند که قادر به غلبه بر برخی از محدودیت های کسب اطلاعات مکانی با استفاده از ماهواره ها و هواپیماها هستند. وضوح داده هایی که معمولاً با استفاده از سیستم عامل های معمولی مانند ماهواره ها و هواپیماهای سرنشین دار در دسترس هستند، معمولاً در محدوده 20 تا 50 است. جمترپمنایکسهل[ 19 ]. به عنوان مثال، وضوح داده های مکانی به دست آمده از طریق یک هواپیمای سرنشین دار از 10-100 سانتی متر متغیر است، زمانی که سیستم ماهواره ای وضوح بیش از 50 سانتی متر را ارائه می دهد [ 12 ].
مجموعه دادههای تولید شده توسط سنجش از دور مبتنی بر پهپاد دارای وضوح فضایی بالایی (2 تا 5 سانتیمتر) هستند که ویژگیها و تغییرات چشمانداز، مانند مورفولوژی ساحلی، مناطق ساحلی و ویژگیهای مورفولوژیکی ساحل را میتوان با جزئیات به صورت دو بعدی ترسیم کرد. ) و سه بعدی (3D) [ 3 ، 8 ، 20 ، 21]. با این حال، چنین تغییرات کوچکی در وضوح فضایی که عموماً با استفاده از هواپیماهای سرنشین دار و سیستم های ماهواره ای به دست می آیند قابل تشخیص نیستند. علاوه بر این، سطح بالای اتوماسیون، سهولت استقرار، سهولت تکرارپذیری بررسی و هزینههای اجرایی پایین پهپادها در مقایسه با سایر روشهای سنجش از راه دور سنتی، امکان انجام مأموریتهای مکرر را فراهم میکند که مجموعه دادههای فضایی با وضوح کمتر از 5 را ارائه میدهند. سانتی متر و تکرار زمانی بالا به دلیل سهولت استقرار نظرسنجی [ 12 ، 22 ، 23 ]. عکسهای ارتوفرانس شده و مدلهای سطح دیجیتال (DSM) برای اندازهگیری و ترسیم مورفولوژی یک ساحل به صورت دو بعدی و سه بعدی استفاده میشوند، که امکان ارزیابی تغییرات ساحل را به دلیل پدیدههای امواج شدید فراهم میکند [6 ]].
پیشرفت های اخیر در بینایی کامپیوتری شامل الگوریتم های SfM است که با موفقیت برای بازسازی مجموعه های بزرگ عکس کنترل نشده استفاده شده است [ 24 ، 25 ، 26 ]. مطالعات تطبیق تکنیکهای SfM را برای پردازش عکسبرداری دادههای پهپاد برای ایجاد یک ابر نقطه سهبعدی جغرافیایی دقیق و تولید DSM با وضوح بالا توصیف کردهاند. تکنیکهای SfM همچنین در تصحیح تصاویر زمینارجاعی که به هم پیوستهاند تا یک موزاییک را تشکیل دهند، استفاده شده است [ 6 ، 19 ].
هی و کاستیا در سال 2008 بیان کردند که تجزیه و تحلیل تصویر مبتنی بر شی جغرافیایی (GEOBIA) یک رشته جدید است که شامل تجزیه و تحلیل مبتنی بر شی از سطح زمین با استفاده از تصاویر سنجش از دور است. آنها GEOBIA را به عنوان زیرشاخه ای از علم اطلاعات جغرافیایی (GIScience) تعریف کردند که به توسعه روش های خودکار برای تقسیم تصاویر سنجش از دور به اشیاء تصویر معنادار، و ارزیابی ویژگی های آنها از طریق مقیاس های مکانی، طیفی و زمانی اختصاص داده شده است، به طوری که برای تولید جدید. اطلاعات جغرافیایی در قالب GIS آماده ” [ 27 ]. استفاده از GEOBIA برای استخراج منطقه ساحلی شامل صادرات اطلاعات جغرافیایی در قالب برداری با کلاس های مناطق آب و ساحلی است که از طریق یک روش خودکار اختصاص داده شده است [ 28 ]].
کار حاضر از خط لوله پهپاد-SfM برای جمعآوری دادههای مکانی، تولید اطلاعات جغرافیایی با وضوح بالا و تجسم سه بعدی مورفولوژی ساحلی با کمک GEOBIA برای شناسایی مناطق ساحلی استفاده میکند. به طور خاص، روش پیشنهادی از GEOBIA از عکسهای ارتو با وضوح بالا برای تعریف مناطق ساحلی استفاده میکند. ترکیبی از این تکنیکهای نوآورانه در دو منطقه ساحلی متنوع برای بررسی کارایی روش توسعهیافته اعمال میشود.
استفاده بالقوه از خط لوله UAV-SfM در چندین مطالعه ارزیابی شده است [ 5 ، 6 ، 8 ، 19 ، 29 ]. با این حال، منابع در مورد استفاده از GEOBIA با اطلاعات جغرافیایی تولید شده توسط روش پهپاد-SfM برای نظارت بر ساحل هنوز در کتابشناسی علمی اخیر کمیاب است.
خط ساحلی به عنوان خطی تعریف می شود که مرز بین خشکی و دریا را تشکیل می دهد. تشخیص خط ساحلی در وضوح بالا شامل تشخیص چندین ناپیوستگی است [ 30 ، 31]. با این حال، مرز بین آب و خشکی در آب زلال به راحتی قابل تشخیص نیست. برای مطالعه مناسب مناطق ساحلی، باید چهار منطقه ساحلی معمولی مورد بررسی قرار گیرد. این مناطق ساحلی عبارتند از منطقه swash، ساحل، خط پیچ و برم. منطقه swash ناحیه ای از زمین است که به طور متناوب توسط دریا پوشانده شده یا در معرض امواج موج است. صورت ساحل شامل بخش شیب دار زمین است که در معرض امواج امواج قرار دارد. خط شکسته بالاترین دسترسی جزر و مد روزانه است. برم مساحت زمینی است که تقریباً افقی است. این بخش خشک ساحل است که معمولاً شامل تپه های شنی است.
2. مواد و روشها
هدف از نظرسنجیهای ما تولید یک مدل ارتوفتو و سه بعدی دقیق از منطقه مورد مطالعه برای شناسایی و تجسم خط ساحلی در هر دو سیستم خط ساحلی Eressos و Neapolis بود. در این مطالعه، دستگاه نقشه برداری اصلی ما یک پهپاد کوادکوپتر برای گرفتن تصاویر هوایی با وضوح بالا از دو منطقه مورد مطالعه بود. این تصاویر برای شناسایی منطقه خط ساحلی GEOBIA و مدل سازی سه بعدی مورفولوژی ساحلی استفاده شد.
2.1. جمع آوری داده های سیستم پهپاد
سیستم پهپاد از یک پیکربندی برخاستن و فرود عمودی (VTOL) استفاده میکرد که میتوانست مأموریتهای GPS برنامهریزیشده را با ایستگاههای بین راه و همچنین مأموریتهای پرواز کاملاً مستقل انجام دهد (شکل 1) .). بخش های اصلی سیستم هوابرد شامل بدنه هوا، موتورها، منبع تغذیه محرک که توسط موتورهای براشلس تغذیه می شد و باتری های لیتیوم پلیمری بود. پیکربندی پهپاد شامل یک سیستم خلبان خودکار Pixhawk بود که همجوشی حسگر و اطلاعات پرواز فعلی را کنترل می کرد. یک GPS 3DR uBlox با ماژول قطب نما. یک ژیروسکوپ 16 بیتی 3 محوره STMicroelectronics L3GD20. یک شتاب سنج/ مغناطیس سنج 14 بیتی STMicroelectronics LSM303D 3 محوره. شتاب سنج/ژیروسکوپ سه محوره MPU 6000. فشارسنج MEAS MS5611؛ و رادیوهای تله متری ایستگاه زمینی 3DR. ظرفیت بارگیری پهپاد 0.4 کیلوگرم و زمان پرواز تقریباً 15 دقیقه بود. علاوه بر این، از یک کنترل از راه دور برای ارسال دستورات در باند فرکانس 2.4 گیگاهرتز استفاده شد تا متعاقباً توسط برد کنترل پرواز پردازش شود. تله متری دو طرفه در فرکانس 433 مگاهرتز ارائه شده توسط پیوندهای رادیویی کار می کرد و به کامپیوتر ایستگاه زمینی اجازه می داد به صورت بی سیم با کوادکوپتر ارتباط برقرار کند. دوربین Canon ELPH 130 با سنسور 16 مگاپیکسل (4608 در 3456 پیکسل) به دلیل سبک وزن بودن، عملکردهای دستی و قابلیت های برنامه نویسی از طریق نرم افزار سفارشی منبع باز به عنوان دوربین نظرسنجی انتخاب شد.شکل 2 نرم افزار متن باز Mission Planner v1.25 [ 32 ] را نشان می دهد که برای نظارت بر پهپاد، و همچنین برای تنظیم ماموریت های پرواز استفاده می شود. هزینه کلی سیستم پهپاد با احتساب سنسور (دوربین) کمتر از 1000 یورو بود.
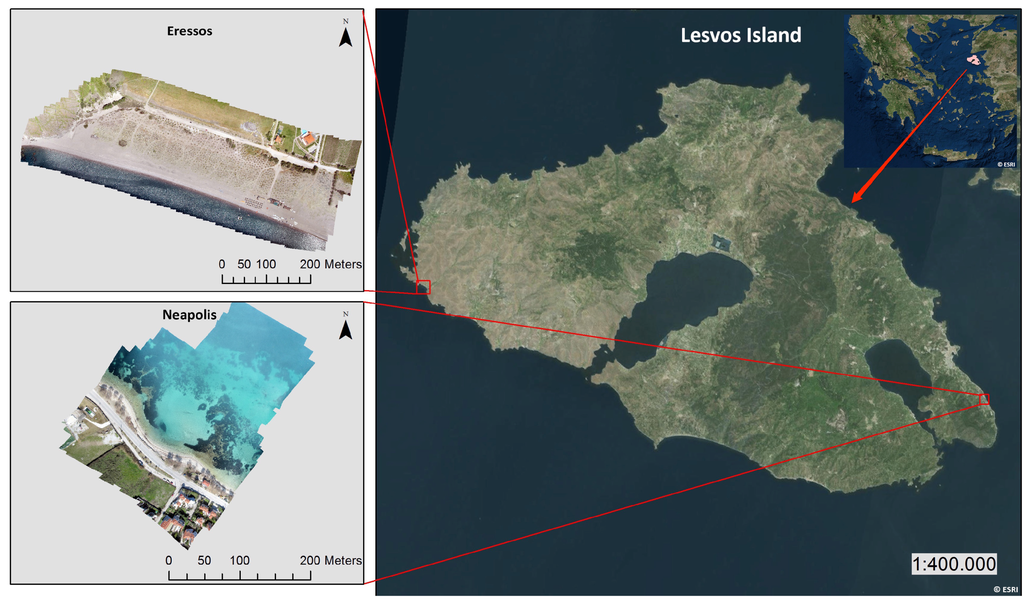
دو منطقه مورد مطالعه در جزیره Lesvos، یونان انتخاب شدند. ساحل Eressos در جنوب شرقی و ساحل Neapoli در ( شکل 2). سایتها ویژگیهای خط ساحلی متفاوتی را ارائه کردند، اما هر دو تحتتاثیر فرسایش قرار دارند. ساحل ارسوس یک ساحل شنی بزرگ به طول تقریبی 4 کیلومتر است که تحت تاثیر امواج بزرگ شمالی قرار دارد. این یک نمای معمولی با یک منطقه آبگیر، یک صفحه ساحلی، و یک برن بزرگ با تپه های شنی دارد. بخش جنوبی ساحل ارسوس به دلیل طوفان های زمستانی در حال کاهش است. در دهه گذشته، قسمت جنوبی ساحل بیش از 10 متر عرض از دست داده است. ساحل Neapoli یک ساحل باریک در کنار یک شبکه جاده اصلی است که از مخلوطی از شن و ماسه تشکیل شده است. همچنین حاوی جلبک های مرده است که یک خط مشخص را در چندین منطقه در امتداد خط ساحلی تشکیل می دهند. این ساحل همچنین دارای درختان ( Tamarix) که به جلوگیری از فرسایش کمک می کنند، اگرچه بسیار نزدیک به دریا هستند و بر تشخیص منطقه ساحل تأثیر می گذارند. به دلیل بادهای شدید شمالی در طول زمستان، ساحل Neapoli تحت تأثیر فرسایش قرار می گیرد که توسط سایه ها در نقشه های ارتوفتو نشان داده شده است.
جمع آوری داده ها در مارس و آوریل 2015 با استفاده از UAS انجام شد. ماموریت ها در دو بلوک برنامه ریزی شده بودند: یکی برای ساحل Neapoli ( شکل 3 a) و دیگری برای ساحل Eressos. میانگین ارتفاع پرواز پهپاد 100 متر بالاتر از سطح زمین (AGL) بود، در حالی که دوربین برای گرفتن عکس نادری هر 3.5 ثانیه با ردپای تصویر 123.4 متر × 91 متر برنامه ریزی شده بود (شکل 3) .ب). عکس های گرفته شده غربال شدند و زیرمجموعه ای از 384 عکس واضح (نه تار) برای هر دو ناحیه برای فرآیند SfM انتخاب شد. وضوح تصاویر، که فاصله نمونه زمین (GSD) یا اندازه پیکسل است، برای هر دو ساحل Neapoli و Eressos 2.96 سانتی متر انتخاب شد. حداکثر اندازه تصویر ثبت شده در ناحیه آزمایش 4608 × 3456 پیکسل بود. با اندازه پیکسل 1.8 �متر2، GSD 2.96 سانتی متر بود.
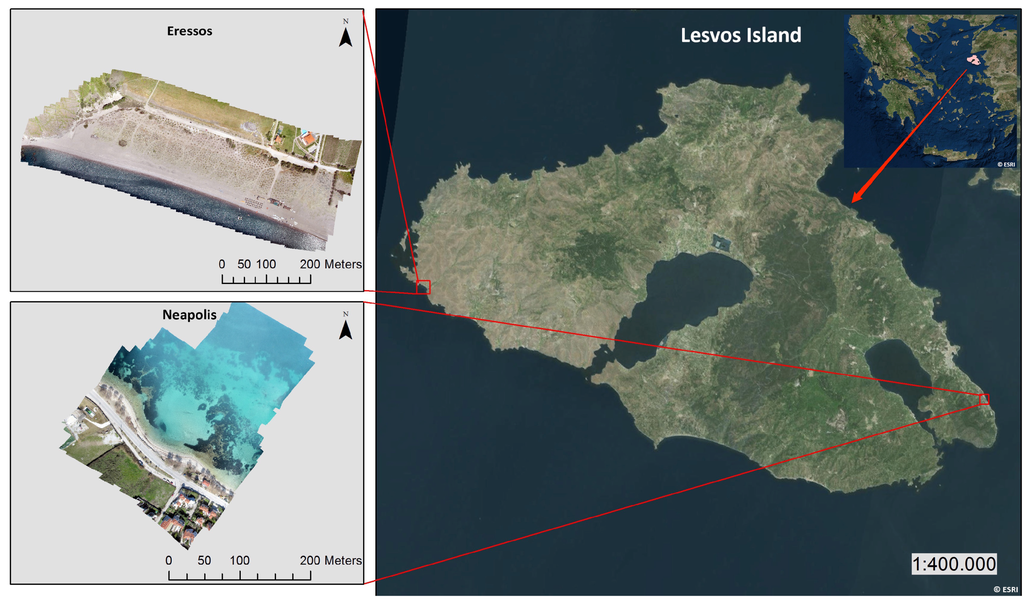
برای هر دو مطالعه موردی، مأموریتهای پهپاد برنامهریزی شده بودند تا 80 درصد همپوشانی در مسیر (جهت پرواز) و 80 درصد یک لایه جانبی متقاطع داشته باشند. بنابراین، در منطقه مورد مطالعه، بیشتر نقاط در 9 عکس یا بیشتر به تصویر کشیده شد. شکل 4 موقعیت های دوربین و همپوشانی تصویر را برای هر دو سواحل نشان می دهد.
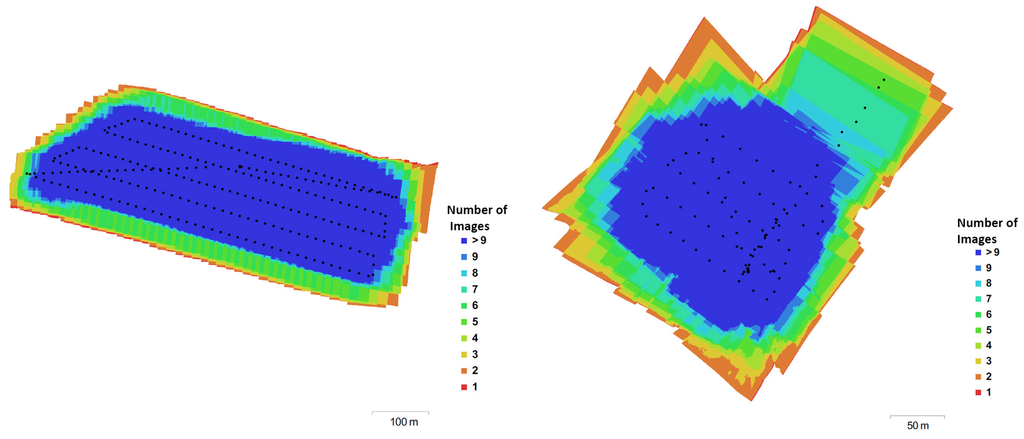
قبل از انجام ماموریت های نظرسنجی برای این دو مطالعه موردی، یک تیم با استفاده از RTK-GPS Topcon HiPer II، اهداف متحرک جغرافیایی مرجع را به عنوان نقاط کنترل زمینی (GCP) در زمین مستقر کردند. اهداف بین منطقه شکن و ساحل بالایی با توزیع فضایی که در شکل 5 نشان داده شده است قرار گرفتند . ابعاد تمام اهداف 297 میلی متر × 420 میلی متر (اندازه A3) و در یک الگوی سیاه و سفید طراحی شده بودند و دارای دایره هایی با شعاع 3 سانتی متر در هر مرکز هدف بودند. این دایره مرکزی را نشان می دهد که باید به وضوح در تصویر قابل مشاهده باشد تا ارتوفتو و DSM صحیح باشد.
2.2. تجسم سه بعدی و تولید نقشه اورتوفتو
چندین بسته نرم افزاری تجاری و غیر تجاری برای پردازش داده های تصویر پهپاد توسعه داده شده است. این بستههای نرمافزاری الگوریتمهای بینایی کامپیوتری و روشهای فتوگرامتری مرسوم را گرد هم میآورند. این بستهها از فناوری چند نمای استریوپسیس (MVS) برای تولید اطلاعات جغرافیایی دوبعدی و سهبعدی از تصاویر هوایی بدون ساختار گرفتهشده توسط پهپاد استفاده میکنند. ما از Agisoft Photoscan [ 33] زیرا خط لوله SfM را در یک رابط کاربر پسند با یک گردش کار مشخص خودکار می کند. علاوه بر این، این نرم افزار دارای کنترل خطا و عملکردهایی است که امکان انتقال آسان اطلاعات جغرافیایی تولید شده در فرمت های فایل قابل خواندن GIS را فراهم می کند. به طور خاص، Agisoft برای شناسایی نقاط ویژگی تصویر در هر تصویر و تطبیق آنها با مجموع تصاویر گرفته شده از سیستم پهپاد استفاده شد. این تطابق ها یک ابر نقطه پراکنده را به عنوان پایه ای برای تولید هندسه صحنه تولید کردند که توسط یک ابر نقطه متراکم نشان داده شد [ 8 ، 11 ، 34]. مشتقات تولید شده در طول روش SfM شامل مجموعه ای از نقاط، که حاوی اطلاعات X، Y، Z، و همچنین اطلاعات رنگ به دست آمده از عکس ها بود. این خروجی های SfM متکی به یک سیستم مختصات دلخواه داخلی بود که باید به مختصات دنیای واقعی تبدیل می شد [ 29 ]. ابر نقطه سه بعدی متراکم و کل تصاویر برای ایجاد یک شبکه سه بعدی از هندسه صحنه، عکس های ارتو با وضوح بالا، DSM ها و مدل های زمین دیجیتال (DTM) برای هر دو منطقه مورد مطالعه استفاده شد.
2.3. GEOBIA – تشخیص خط ساحلی
GEOBIA برای شناسایی مناطق مختلف ساحل و خط ساحلی استفاده شد. برای این تحلیل، تصاویر به گروههایی از پیکسلها با ویژگیهای طیفی و فضایی مشابه تقسیم شدند. یک الگوریتم تقسیم بندی چند تفکیک پذیری که قبلاً در چندین کاربرد اقیانوسی استفاده می شد [ 21 ، 35 ، 36 ]. نرم افزار eCognition Developer 9.1 [ 37] با پارامترهای تقسیم بندی چند وضوح زیر استفاده شد: اندازه 20، شکل 0.5، و فشردگی 0.5. طبقات زیر از خطوط ساحلی مشخص شد: دریا، ماسه مرطوب، و سنگ های زیر آب. مناطق آموزشی نشان دهنده آن کلاس ها در نقشه ارتوفوتو با بازرسی بصری انتخاب شدند. حداقل 50 سایت آموزشی برای هر کلاس در یک طرح نمونه گیری تصادفی طبقه ای استفاده شد. مناطق انتخاب شده برای تعریف اشکال طیفی و ویژگی های فضایی هر طبقه استفاده شد. این ویژگی ها به قوانین طبقه بندی با منطق فازی تبدیل شدند.
پس از طبقه بندی، پس پردازش برای تصحیح هر گونه اشیاء طبقه بندی اشتباه انجام شد. در همان زمان، خط ساحلی به صورت دستی در نقشه ارتوفتو برای مقایسه دیجیتالی شد. روش کلی شامل مراحل روششناختی زیر بود: تقسیمبندی، تعریف کلاس، انتخاب منطقه آموزشی، تعیین قوانین، طبقهبندی فازی، تعیین خط ساحلی دستی، و تخمین دقت.
3. نتایج و بحث
خط لوله پهپاد-SfM برای ساحل Eressos و ساحل Neapoli انجام شد. تمام اطلاعات جغرافیایی تولید شده به GGRS87 / Grid یونانی ارجاع داده شد (EPSG: 2100). ابرهای نقطه ای متراکم تولید شده برای ساحل ارسوس و ساحل نئاپولی شامل 456.7 و 581.171 است. پ�من�تیمتر2، به ترتیب. دقت اطلاعات جغرافیایی تولید شده با محاسبه باقیمانده ها، مجموع ریشه مربعات خطا (RSSE) و ریشه میانگین مربعات خطا (RMSE) برای همه GCPهای مورد استفاده در هر دو ماموریت بررسی ارزیابی شد. وضوح پیکسل ارتوفتو تولید شده 2.34 و 2.41 بود جمترپمنایکسهلبه ترتیب برای ساحل Neapoli و Eressos ساحل. علاوه بر این، وضوح پیکسل DSM تولید شده از ماموریت پیمایش Neapoli 4.35 بود جمترپمنایکسهل، در حالی که وضوح پیکسل DSM از نظرسنجی Eressos 4.68 بود جمترپمنایکسهل. آمار خطای GCP برای ماموریت بررسی Eressos در جدول 1 خلاصه شده است . آمار خطای GCPs برای ماموریت بررسی Neapoli در جدول 2 ارائه شده است . RSSE برای همه GCPها در ماموریت بررسی Eressos از 1 تا 7 سانتی متر بود. RSSE برای ماموریت پیمایش Neapoli از 3 تا 16 سانتی متر پیدا شد. دقت خط لوله UAV-SfM و خطای تخمینی برای هر دو بررسی در جدول 3 خلاصه شده است.. Orthophoto و DSM RMSE برای هر دو مورد به ترتیب 0.187 و 0.585 پیکسل محاسبه شد. تفاوت دقت بین دو ماموریت پیمایشی به دلیل توزیع فضایی متفاوت و تعداد GCPهای مورد استفاده برای ارجاع جغرافیایی نقشههای ارتوفتو و DSM است. این تفاوت ها را می توان به استفاده از 14 GCP در نظرسنجی Erresos در مقایسه با 8 GCP مورد استفاده در بررسی Neapoli نسبت داد. علاوه بر این، کیفیت پایین لنز دوربین، خطای دقت را به دلیل باقیمانده تصویر زیاد افزایش می دهد. با این حال، دقت بهدستآمده، الزامات ایجاد تجسمهای 2 بعدی/3 بعدی و تعریف مناطق ساحلی را برآورده میکند، که تمرکز اصلی این مطالعه بود.
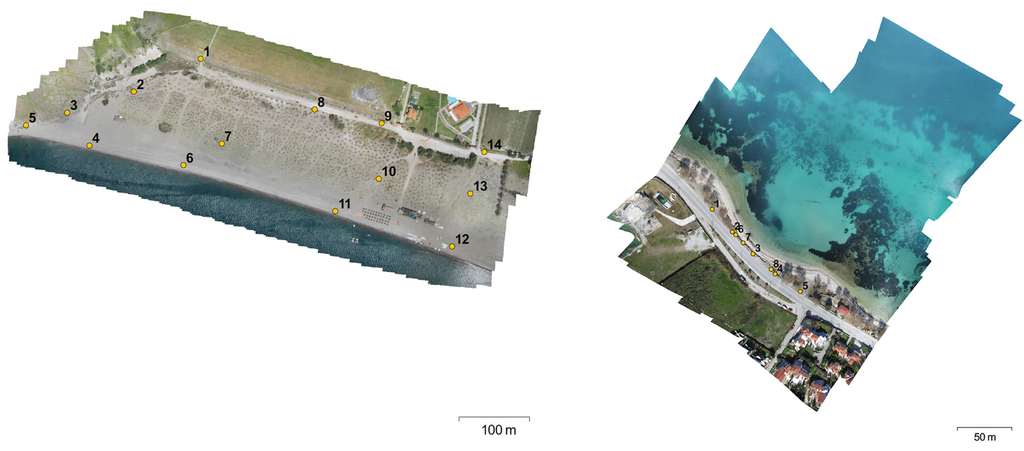
ارتوفوتو تولید شده از محل مطالعه نئاپولی وضوح 2.41 سانتی متر داشت ( شکل 6 ). قسمت داخلی در شکل 6، منطقه swash، خطوط شکسته، و منطقه برم را به صورت سه بعدی نشان می دهد. سطح جزئیات تجسم های سه بعدی تولید شده به وضوح ساختار مناطق ساحلی را نشان می دهد. علاوه بر این، DSM تولید شده توسط گردش کار ارائه شده در این مقاله دارای وضوح فضایی است ≤5سانتی متر برای هر دو ساحل. شکل 7 ارتفتو و dsm را برای ساحل ارسوس نشان می دهد.
شکل 6 ، شکل 7 و شکل 8 درجه بالایی از جزئیات را نشان می دهد که با استفاده از روش UAV-SfM به دست آمده است. جدای از خط ساحلی، تغییرات کوچکی مانند صخرههای کوچک و نیمکتهای کوچک در ساحل در کل وسعت منطقه نقشهبرداری شده قابل مشاهده است (به قسمت داخلی در شکل 6 و شکل 8 مراجعه کنید ).
چندین ویژگی مهم ساحلی، از جمله منطقه swash، صورت ساحل، خط پیچ و بند، در نقشه های ارتوفتو با وضوح بالا قابل مشاهده هستند، اما در تصاویر ماهواره ای با وضوح بالا قابل مشاهده نیستند. نقشههای ارتوفوتومی را نمیتوان با استفاده از روشهای طبقهبندی مبتنی بر پیکسل سنجش از دور (به عنوان مثال، نزدیکترین همسایه) پردازش کرد زیرا نمایندگان طیفی برای کلاسهای مختلف مشابه هستند. تقسیمبندی نقشههای ارتوفتو یک مرحله حیاتی است زیرا ویژگیهای اشیاء مختلف را میتوان در فرآیند طبقهبندی استفاده کرد. از آنجایی که اندازه تقسیم بندی، شکل و فشردگی هندسه یک شی را در تقسیم بندی چند تفکیک پذیری تعیین می کند، ویژگی ها باید به دقت ارزیابی شوند. شفافیت آب و حالت موج از دلایل طبقه بندی نادرست خطوط ساحلی هستند. تشخیص خط ساحلی در نقشه های ارتوفتو با وضوح فضایی سانتی متر به پیچیدگی ساحل بستگی دارد. در مواردی با ساختار ساده مانند ساحل شنی با صورت بزرگ می توان به تشخیص ناحیه اسواش و صورت ساحلی با دقت بالایی دست یافت.شکل 9 ). با این حال، در موارد پیچیده ای که ساحل ترکیبی از ترکیب است، مانند زونا با اندازه های مختلف، جلبک های مرده، سایه درختان و شکاف های فرسایشی، تشخیص خط ساحلی دشوارتر است (شکل 10 ) . DSM ها می توانند در تعیین بردارهای مورد استفاده برای توصیف ویژگی های ساحل کمک کنند.
اولین مطالعه موردی، ساحل ارسوس، یک ساحل شنی بزرگ است که تحت تأثیر امواج شمالی بزرگ قرار گرفته است. شکل 9نمونه ای از روش توسعه یافته مورد استفاده برای بخش کوچکی از ساحل را نشان می دهد. با استفاده از تصویر، اشیاء را می توان با توجه به ویژگی های طیفی آنها به چهار منطقه طبقه بندی کرد. نزدیک ترین منطقه به سمت دریا، منطقه ای است که در آن موج موج، ماسه را مرطوب می کند و بنابراین، به راحتی از بقیه مناطق قابل تشخیص است. سه منطقه بعدی به صورت ساحلی تعلق دارد، اگرچه هر کدام ویژگی های متفاوتی دارند. منطقه سبز نمایانگر یک منطقه swash قدیمی (شاید از روز قبل) یا یک موج شدید به دلیل امواج بزرگ است. ناحیه قهوه ای حاصل امواج بزرگ روزها/هفته های قبل است و از سنگریزه های کوچک و پوسته های مرده تشکیل شده است. آخرین ناحیه ارغوانی صورت ساحل فقط از شن و ماسه تشکیل شده است و حاصل امواج بزرگ در زمستان است.
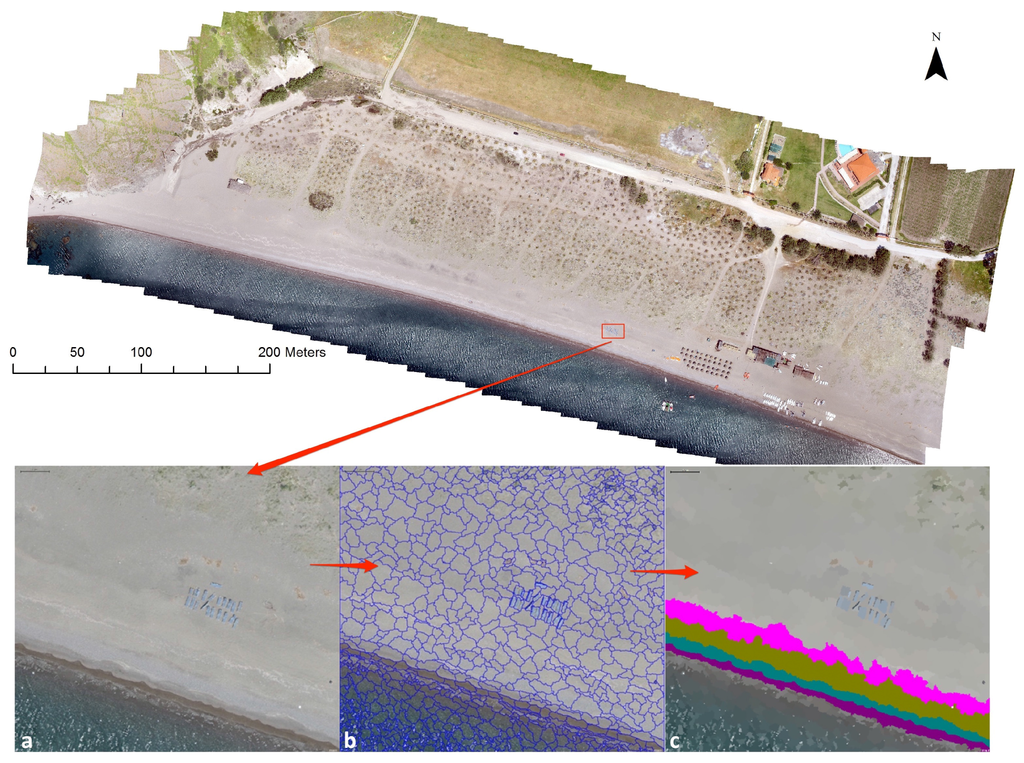
مطالعه موردی دوم، ساحل نئاپولی ( شکل 10، ساحلی کوچک با محیطی پیچیده است که در آن زباله های آلی و معدنی در اثر امواج ته نشین می شوند. در این حالت، مناطق ساحلی به دلیل سایه درختان و تشکیل جلبک های مرده به راحتی تشخیص داده نمی شوند. با این حال، چهار منطقه را می توان طبقه بندی کرد و در صورت لزوم به صورت دستی اصلاح کرد. با رنگ مشکی، سایههای نیمکتی نشان داده شدهاند که صفحاتی در ارتفاعهای مختلف هستند که در اثر فرسایش در اثر امواج بزرگ ایجاد میشوند. سه هواپیمای مختلف بین دریا و شبکه جاده شناسایی شده است. بعد، منطقه قدیمی swash بنفش است. منطقه swash توسط سایه درختان قطع می شود و مخلوطی از مناطق پوشیده شده توسط جلبک های مرده (قرمز) و خاک برهنه با سنگریزه (صورتی) است. مخلوط ماسه و شن به رنگ خاکستری نشان داده شده است. در این موقعیت،
از آنجایی که این اولین تلاش برای شناسایی مناطق ساحلی (ساحل) در ادبیات است، نمی توان مقایسه ای با مطالعات قبلی انجام داد. طبقهبندی ما باید با طبقهبندی تعیینشده با استفاده از اندازهگیریها مقایسه شود، مانند نقاط DGPS در سراسر منطقه و/یا اسکنر لیزری زمینی، که وضوح مشابه یا بهتری نسبت به ارتوفوتو مورد استفاده ما دارند. اسکنر لیزری در این مطالعه گنجانده نشده است، اگرچه استفاده از یکی برای کارهای بعدی برنامه ریزی شده است. نقاط DGPS انتخاب شدند، اما فقط برای محاسبه دقت نقشه ارتوفتو و عمدتاً در داخل زون ها و نه در مرزها قرار گرفتند. با این حال، از آنجایی که دقت ارتوفوتو 2-3 سانتی متر استپیش بینی می شود که جابجایی فضایی یکسانی داشته باشد. هدف این کار ایجاد یک نقشه مرجع از مناطق ساحلی است که به عنوان پایه ای برای مقایسه سایر داده های با وضوح پایین تر، مانند تصاویر ماهواره ای با وضوح بالا با وضوح 0.30 سانتی متر تا 1 متر، یا دوربین هایی که دارای تنوع فضایی در سراسر یک خط هستند، استفاده می شود. از دید
اگرچه تنها دو منطقه در مقیاس کوچک مورد مطالعه قرار گرفت، واضح است که سنجش از راه دور مبتنی بر پهپاد شکاف در مقیاس و وضوح بین مشاهدات زمینی و تصاویر بدستآمده از هواپیماهای سرنشین دار معمولی و حسگرهای ماهوارهای را پر میکند. علاوه بر این، تکنیکهای بینایی کامپیوتری SfM و MVS نیاز به دادههای جغرافیایی دقیق برای تجزیه و تحلیل دو بعدی و سه بعدی را تکمیل میکنند. محصولات مشتق شده از پهپاد-SfM می توانند به ابزاری مهم و دقیق برای تجزیه و تحلیل تغییرات در منظر و فرسایش منظر در مقیاس های مختلف مکانی و زمانی تبدیل شوند.
از آنجایی که وضوح و دقت نقشههای اورتوفوتو و تجسمهای سهبعدی را نمیتوان از مجموعه دادههای ماهوارهای به دست آورد و دادههای تصویربرداری لیزری، تشخیص و محدوده (LIDAR) با وضوح بالا هنوز برای جزیره Lesvos در دسترس نیست، جمعآوری دادههای مبتنی بر پهپاد یک کارآمد و کارآمد را فراهم میکند. چارچوب سریع برای سنجش از دور مورفولوژی ساحلی
4. نتیجه گیری
در این مقاله، ما از یک تکنیک UAV-SfM برای تولید اطلاعات جغرافیایی دقیق، با وضوح بالا و ژئو تجسمهای سه بعدی از دو منطقه مورد مطالعه استفاده کردیم. علاوه بر این، GEOBIA به اطلاعات جغرافیایی برای شناسایی مناطق ساحلی در دو ساحل مختلف اعمال شد. پهپادها با استفاده از حسگرهای کوچک بستری را برای عکاسی هوایی از فاصله نزدیک فراهم می کنند و می توانند به ابزاری مفید برای رصد مکانی و زمانی ساحلی و پایش محیطی و همچنین نظارت بر فرسایش در مناطق ساحلی تبدیل شوند. این مطالعه از تکنیکهای SfM ترکیب شده با الگوریتمهای بینایی کامپیوتری برای عکسهای هوایی بهدستآمده از یک پهپاد چهار روتوری برای تعیین بازنمایی سهبعدی دو مکان ساحلی در لزوس، یونان استفاده کرد. این دو مکان به این دلیل انتخاب شدند که خطوط ساحلی به دلیل بادهای شدید و شرایط موج به تدریج در حال فرسایش هستند.
نتایج نشان داد که یک ابر نقطه جغرافیایی مرجع، عکس ارتو و DSM با زیرپیکسل RMSE ≤5سانتی متر را می توان از تصاویر به دست آمده با استفاده از یک دوربین فشرده متصل به یک پهپاد چهار روتوری که 100 متر AGL پرواز می کند، به دست آورد. تصویر بهدستآمده دارای وضوح فضایی مورد نیاز، سطح بالایی از اتوماسیون بررسی و تکرارپذیری بالای بررسی برای نقشهبرداری و نظارت بر پدیدهها و تغییرات طبیعی ساحلی بود. علاوه بر این، پهپادها می توانند داده های مکانی را برای مناطق غیرقابل دسترس به دست آورند و امکان تکرار آسان یک بررسی را فراهم کنند.
خط لوله UAV-SfM از ترکیبی از جمع آوری داده های مکانی از یک پهپاد و بینایی کامپیوتری و تکنیک های پردازش تصویر برای خودکارسازی روش های تشخیص و ایجاد اندازه گیری های درجا با پوشش فضایی بزرگ برای نظارت بر انواع پدیده های محیطی استفاده می کند.
این مطالعه نشان داد که چگونه ترکیب دو فناوری جدید سنجش از دور در قالب روشهای UAV-SfM و GEOBIA میتواند با موفقیت برای نقشهبرداری مناطق خط ساحلی و ایجاد ژئوتصویرسازی سه بعدی دقیق مورفولوژی ساحلی ترکیب شود. استفاده از پهپادها در ترکیب با روش SfM برای ایجاد اطلاعات جغرافیایی دوبعدی و سه بعدی می تواند برای نقشه برداری ساحلی نیز به کار رود.
نتیجه اصلی به دست آمده از این مطالعه این است که اطلاعات جغرافیایی با وضوح مکانی بالا تولید شده از یک خط لوله پهپاد-SfM در ترکیب با GEOBIA اطلاعات ساختاری جدیدی را برای نظارت بر ساحل ایجاد می کند. بردارهای خاص برای خط ساحلی، منطقه swash، خطوط شکسته، تاج برم، محدودیتهای swash و نواحی برم را میتوان در نتیجه موج در فریمهای زمانی مختلف شناسایی کرد. بنابراین، ژئومورفولوژیستهای ساحلی که به اطلاعات توپوگرافی دقیق سیستمهای ساحلی برای انجام یک شبیهسازی و نقشهبرداری قابل اعتماد از فرسایش ساحلی نیاز دارند، میتوانند از دادههای مکانی تولید شده توسط روش پیشنهادی استفاده کنند. علاوه بر این، مدیریت مناطق ساحلی، تأسیسات بندری و پروژههای انرژی ساحلی مناطقی هستند که میتوانند از چنین روششناسی استفاده کنند.
منابع
- Kolednik، D. نظارت ساحلی برای تشخیص تغییر با استفاده از داده های چند زمانی LiDAR. در مجموعه مقالات CESCG 2014: هجدهمین سمینار اروپای مرکزی در زمینه گرافیک کامپیوتری، اسمولنیس، اسلواکی، 25 تا 27 مه 2014. صص 73-78.
- Pajares, G. بررسی اجمالی و وضعیت فعلی کاربردهای سنجش از راه دور مبتنی بر وسایل نقلیه هوایی بدون سرنشین (UAV). فتوگرام مهندس Remote Sens. 2015 ، 81 ، 281-330. [ Google Scholar ] [ CrossRef ]
- یاستیکلی، ن. باغچی، من. Beser, C. پردازش داده های تصویری جمع آوری شده توسط سیستم های پهپاد سبک برای جمع آوری و به روز رسانی داده های GIS. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2013 ، XL-7/W2 ، 267–270. [ Google Scholar ] [ CrossRef ]
- Gonçalves، JA; Henriques, R. فتوگرامتری پهپاد برای پایش توپوگرافی مناطق ساحلی. ISPRS J. Photogramm. Remote Sens. 2015 ، 104 ، 101-111. [ Google Scholar ] [ CrossRef ]
- کلاپویت، اف. Vanacker، V. ون اوست، ک. تکرارپذیری بازسازیهای توپوگرافی زمین مبتنی بر پهپاد بر اساس الگوریتمهای ساختار از حرکت. ژئومورفولوژی 2015 ، 260 ، 4-15. [ Google Scholar ] [ CrossRef ]
- برونیر، جی. فلوری، جی. آنتونی، ای جی; گاردل، ا. Dussouillez, P. فتوگرامتری ساختار هوابرد با برد نزدیک برای بررسیهای مورفومتریک ساحلی با وضوح بالا: نمونههایی از یک ساحل دوار فرورفته. ژئومورفولوژی 2016 ، 261 ، 76-88. [ Google Scholar ] [ CrossRef ]
- کازلا، ای. روور، آ. پدرونچینی، آ. موسرینو، ال. کازلا، ام. Cusati، LA; واچی، م. فراری، م. Firpo, M. مطالعه برآمدگی موج با استفاده از مدلهای عددی و فتوگرامتری هوایی در ارتفاع پایین: ابزاری برای مدیریت ساحلی. استوار. ساحل. Shelf Sci. 2014 ، 149 ، 160-167. [ Google Scholar ] [ CrossRef ]
- مانچینی، اف. دوبینی، م. گاتلی، ام. استچی، اف. فابری، اس. Gabbianelli، G. استفاده از وسایل نقلیه هوایی بدون سرنشین (UAV) برای بازسازی توپوگرافی با وضوح بالا: ساختار از رویکرد حرکت در محیط های ساحلی. Remote Sens. 2013 , 5 , 6880–6898. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کلومینا، آی. Molina, P. سیستم های هوایی بدون سرنشین برای فتوگرامتری و سنجش از دور: یک بررسی. ISPRS J. Photogramm. Remote Sens. 2014 ، 92 ، 79-97. [ Google Scholar ] [ CrossRef ]
- رموندینو، اف. اسپرا، ام جی; نوچرینو، ای. منا، اف. Nex، F. وضعیت هنر در تطبیق تصویر با چگالی بالا. فتوگرام ضبط 2014 ، 29 ، 144-166. [ Google Scholar ] [ CrossRef ]
- وستوبی، ام جی. براسینگتون، جی. گلسر، NF; هامبری، ام جی; رینولدز، JM فتوگرامتری “ساختار از حرکت”: ابزاری کم هزینه و موثر برای کاربردهای علوم زمین. ژئومورفولوژی 2012 ، 179 ، 300-314. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هاروین، اس. Lucieer, A. ارزیابی دقت ابرهای نقطه جغرافیایی ارجاع شده تولید شده از طریق تصویربرداری چند نما از تصاویر وسایل نقلیه هوایی بدون سرنشین (UAV). Remote Sens. 2012 ، 4 ، 1573-1599. [ Google Scholar ] [ CrossRef ]
- سولبو، اس. استورولد، آر. نقشه برداری از یخچال های طبیعی اسوالبارد با UAS در حال گریان. بین المللی قوس. فتوگرام Remote Sens. 2013 ، XL ، 4-6. [ Google Scholar ] [ CrossRef ]
- Zarco-Tejada، PJ; دیاز-وارلا، آر. Angileri، V. لودجانی، ص. کمی سازی ارتفاع درخت با استفاده از تصاویر با وضوح بسیار بالا به دست آمده از یک وسیله نقلیه هوایی بدون سرنشین (UAV) و روش های بازسازی خودکار عکس سه بعدی. یورو جی. آگرون. 2014 ، 55 ، 89-99. [ Google Scholar ] [ CrossRef ]
- نقشه برداری Dietrich، JT Riverscape با ساختار مبتنی بر هلیکوپتر بر اساس فتوگرامتری حرکتی. ژئومورفولوژی 2016 ، 252 ، 144-157. [ Google Scholar ] [ CrossRef ]
- D’Oleire-Oltmanns، S. مارزولف، آی. پیتر، KD; ریس، هواپیمای بدون سرنشین JB (UAV) برای نظارت بر فرسایش خاک در مراکش. Remote Sens. 2012 , 4 , 3390–3416. [ Google Scholar ] [ CrossRef ]
- Klemas، VV سنجش از دور ساحلی و محیطی از وسایل نقلیه هوایی بدون سرنشین: یک مرور کلی. جی. ساحل. Res. 2015 ، 315 ، 1260-1267. [ Google Scholar ] [ CrossRef ]
- لچنر، آ. فلچر، ا. یوهانسن، ک. ارسکین، پی. مشخص کردن باتلاقهای مرتفع با استفاده از روشهای طبقهبندی مبتنی بر شی و تصاویر تفکیک فوقالعاده فضایی به دست آمده از یک وسیله نقلیه هوایی بدون سرنشین. Proc. XXII ISPRS Congr. ان فتوگرام حسگر از راه دور اسپات. Inf. علمی 2012 ، 4 ، 101-106. [ Google Scholar ] [ CrossRef ]
- ترنر، دی. لوسییر، آ. Watson, C. یک تکنیک خودکار برای تولید موزاییک های ژئوریکتیف شده از تصاویر وسایل نقلیه هوایی بدون سرنشین (UAV) با وضوح فوق العاده بالا، بر اساس ابرهای نقطه ای ساختار از حرکت (SFM). Remote Sens. 2012 ، 4 ، 1392-1410. [ Google Scholar ] [ CrossRef ]
- نکس، اف. Remondino، F. UAV برای برنامه های نقشه برداری سه بعدی: یک بررسی. Appl. Geomat. 2014 ، 6 ، 1-15. [ Google Scholar ] [ CrossRef ]
- توپوزلیس، ک. Kitsiou، D. تشخیص و طبقهبندی پدیدههای جوی در مقیاس بینالمللی در بالای دریا در تصاویر SAR. سنسور از راه دور محیط. 2015 ، 160 ، 263-272. [ Google Scholar ] [ CrossRef ]
- ورهوون، جی. تلمن، دی. Vermeulen، F. نقشه برداری اورتوفوتو مبتنی بر دید رایانه ای از سایت های باستانی پیچیده: معدن باستانی Pitaranha (پرتغال-اسپانیا). Archaeometry 2012 ، 54 ، 1114-1129. [ Google Scholar ] [ CrossRef ]
- توپوزلیس، ک. پاپاکنستانتینو، ا. Pavlogeorgatos، G. تشخیص تغییر خط ساحلی با استفاده از پهپاد، سنجش از دور، GIS و بازسازی سه بعدی. در مجموعه مقالات پنجمین کنفرانس بین المللی مدیریت محیط زیست، مهندسی، برنامه ریزی و اقتصاد (CEMEPE) و کنفرانس SECOTOX، جزیره میکونوس، یونان، 14 تا 18 ژوئن 2015.
- فوروکاوا، ی. Ponce, J. کالیبراسیون دقیق دوربین از طریق چند نمای استریو و تنظیم بسته. بین المللی جی. کامپیوتر. Vis. 2009 ، 84 ، 257-268. [ Google Scholar ] [ CrossRef ]
- Wu, C. به سمت ساختار افزایشی زمان خطی از حرکت. در مجموعه مقالات کنفرانس بین المللی 2013 در 3D Vision، سیاتل، WA، ایالات متحده آمریکا، 29 ژوئن تا 1 ژوئیه 2013. صص 127-134.
- کلینگنر، بی. مارتین، دی. رزبورو، جی. نمای خیابان حرکت-از-ساختار-از-حرکت. در مجموعه مقالات کنفرانس بین المللی IEEE 2013 در بینایی کامپیوتر، سیدنی، NSW، استرالیا، 1-8 دسامبر 2013. ص 953-960.
- هی، GJ; Castilla, G. تجزیه و تحلیل تصویر مبتنی بر شی جغرافیایی (GEOBIA): نام جدیدی برای یک رشته جدید. در یادداشت های سخنرانی در اطلاعات جغرافیایی و نقشه برداری ; Blaschke, T., Lang, S., Hay, GJ, Eds. Springer: برلین، آلمان، 2008; صص 75-89. [ Google Scholar ]
- Urbanski، JA استخراج خط ساحلی با استفاده از OBIA و GIS. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2010 ، 46 ، 378. [ Google Scholar ]
- ماتیوس، ای جی. Jensen، JLR تجسم و تعیین کمیت LAI تاجپوش تاکستان با استفاده از یک وسیله نقلیه هوایی بدون سرنشین (UAV) ساختار با چگالی بالا را از ابر نقطه حرکت جمعآوری کرد. Remote Sens. 2013 ، 5 ، 2164-2183. [ Google Scholar ] [ CrossRef ]
- جیانینی، MB; Parente، C. یک رویکرد مبتنی بر شی برای استخراج خط ساحلی از تصاویر چند طیفی Quickbird. بین المللی J. Eng. تکنولوژی 2015 ، 6 ، 2698-2704. [ Google Scholar ]
- علیشیخ، ع. قربانعلی، ع. نوری، شمال غرب تشخیص تغییر خط ساحلی با استفاده از سنجش از دور. بین المللی جی. محیط زیست. علمی تکنولوژی 2007 ، 4 ، 61-66. [ Google Scholar ] [ CrossRef ]
- هواپیماهای بدون سرنشین DIY. در دسترس آنلاین: http://diydrones.com/ (در 11 فوریه 2016 قابل دسترسی است).
- Agisoft Photonscan. در دسترس آنلاین: http://www.agisoft.com/ (دسترسی در 11 فوریه 2016).
- دلارت، اف. سیتز، اس. تورپ، سی. Thrun, S. ساختار از حرکت بدون مطابقت. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، جزیره هیلتون هد، SC، ایالات متحده آمریکا، 13 تا 15 ژوئن 2000.
- توپوزلیس، ک. کاراتاناسی، وی. پاولاکیس، پ. Rokos، D. تشخیص و تمایز بین نشت نفت و پدیده های مشابه از طریق شبکه های عصبی. ISPRS J. Photogramm. Remote Sens. 2007 , 62 , 264-270. [ Google Scholar ] [ CrossRef ]
- کاراتاناسی، وی. توپوزلیس، ک. پاولاکیس، پ. Rokos, D. روشی شی گرا برای تشخیص نشت نفت. بین المللی J. Remote Sens. 2006 ، 27 ، 5235-5251. [ Google Scholar ] [ CrossRef ]
- eCognition|Trimble. در دسترس آنلاین: http://www.ecognition.com/ (در 11 فوریه 2016 قابل دسترسی است).

شکل 1. سیستم وسایل نقلیه هوایی بدون سرنشین (UAV) مورد استفاده برای جمع آوری داده ها.
شکل 2. نقشه موقعیت برای هر دو منطقه مورد مطالعه. تصاویر ماهواره ای برای نقشه های مکان از نقشه های پایه ESRI مشتق شده اند (منابع: Esri، DigitalGlobe، GeoEye، i-cubed، USDA، USGS، AEX، Getmapping، Aerogrid، IGN، IGP، swisstopo، و جامعه کاربران GIS).

شکل 3. ( الف ) ساحل Neapoli که خطوط بررسی پهپاد را نشان می دهد. نشانگرهای سبز مسیری را به تصویر میکشند که سیستمهای هوایی بدون سرنشین (UAS) دنبال میشوند (ترتیب در مسیر) و نشانگرهای قرمز چهار گوشه منطقه مورد مطالعه (بلوک ماموریت) (ب) همپوشانی در مسیر و عرض مسیر را نشان میدهند . برای گرفتن تصویر رنگ بنفش ردپای تصویر به دست آمده را نشان می دهد. (داده های نقشه: Google، DigitalGlobe).
شکل 4. مکان های دوربین و همپوشانی های تصویر برای ساحل ارسوس ( سمت چپ ) و ساحل نئاپولی ( راست ). رنگهای افسانه تعداد تصاویری را که برای هر نقطه ظاهر میشوند نشان میدهند.
شکل 5. توزیع نقاط کنترل زمینی (GCP) برای ساحل Eressos ( سمت چپ ) و ساحل Neapoli ( راست ).
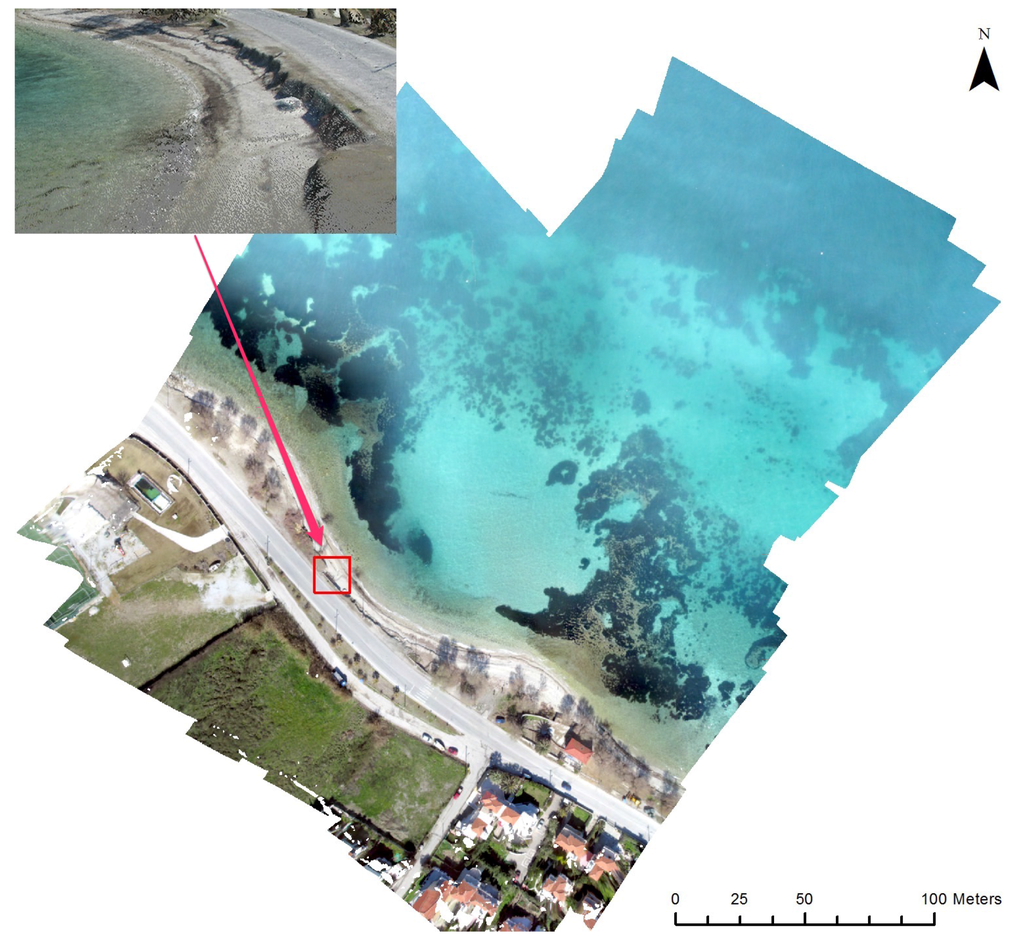
شکل 6. ارتوفوتو محل مطالعه Neapoli دارای وضوح فضایی 3 سانتی متر بود. قسمت داخلی تجسم سه بعدی منطقه swash، خطوط شکسته، و منطقه برم را به تصویر می کشد.
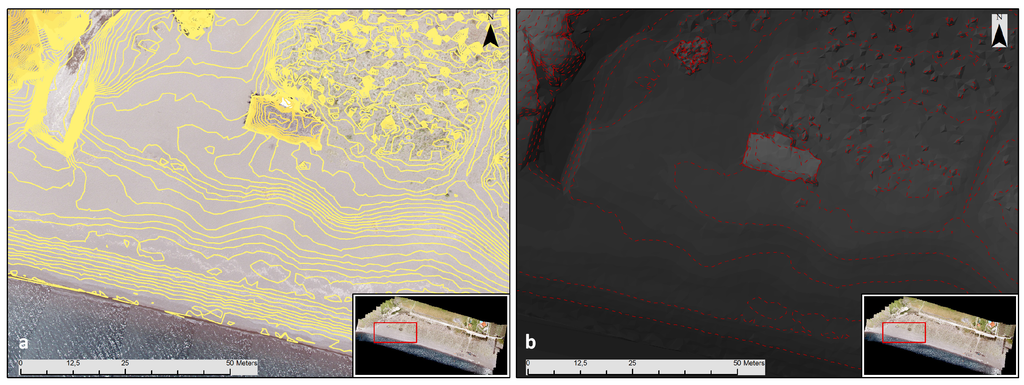
شکل 7. ( الف ) ارتفتو محل مطالعه Eressos که خطوط ایزولاین کانتور 10 سانتی متری (سمت چپ) را نشان می دهد. ( ب ) DSM و ناحیه برم با خطوط ایزوله کانتور 1 متر (راست).
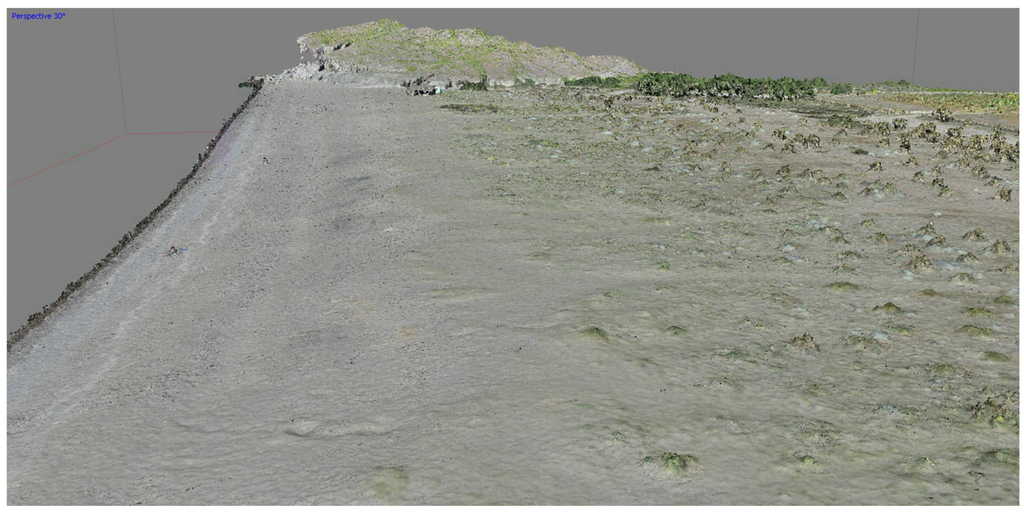
شکل 8. سطح بالایی از جزئیات نشان داده شده در تجسم سه بعدی مورفولوژی ساحل ارسوس.
شکل 9. ( الف ) بخشی از ساحل ارسوس (سمت چپ). ( ب ) تقسیم بندی تصویر (مرکز). ( ج ) تشخیص منطقه ساحلی (سمت راست). مناطق با رنگ به تصویر کشیده می شوند: بنفش ماسه مرطوب، قرمز جلبک مرده، قهوه ای ماسه خشک، و صورتی خاک لخت و سنگریزه است.
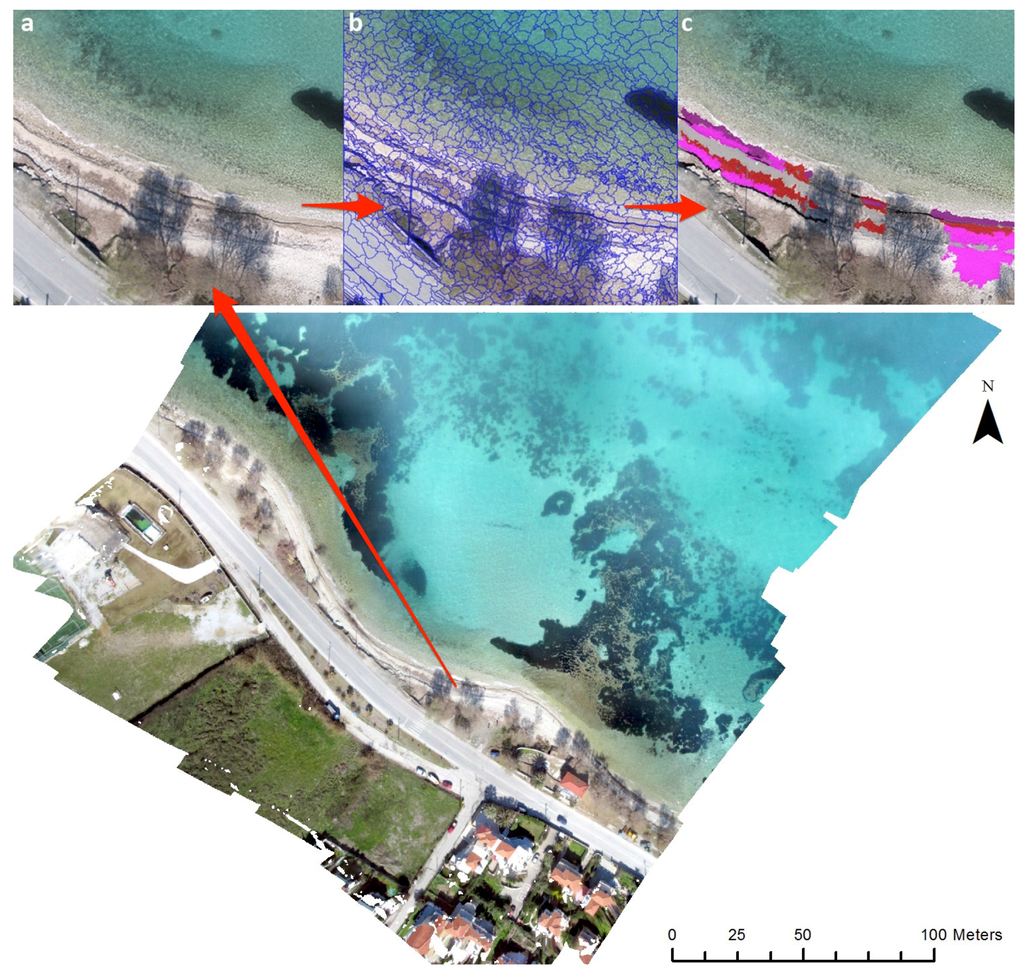
شکل 10. ( الف ) بخشی از ساحل نئاپولی (سمت چپ). ( ب ) تقسیم بندی تصویر (مرکز). ( ج ) تشخیص منطقه ساحلی (سمت راست). این مناطق با رنگ به تصویر کشیده می شوند: بنفش ماسه مرطوب، سبز منطقه swash قدیمی، قهوه ای ماسه خشک، و صورتی ماسه خشک همگن است.

جدول 1. آمار خطای GCPs برای ماموریت بررسی Eressos.
جدول 2. آمار خطای GCPs برای ماموریت بررسی Neapoli.
جدول 3. مقایسه آمار خطا.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر