

خلاصه
تشخیص خودکار حاشیه یک موضوع مهم در تعمیر و نگهداری جاده، مدلسازی سه بعدی شهری (سه بعدی) و زمینههای ناوبری مستقل است. این مقاله بر روی تقسیم بندی حاشیه ها و مرزهای خیابان با استفاده از یک ابر نقطه سه بعدی گرفته شده توسط یک سیستم اسکنر لیزری سیار (MLS) متمرکز شده است. روش ما راه حلی بر اساس طرح ابر نقطه اندازه گیری شده در صفحه XY ارائه می دهد. بر روی آن صفحه، یک الگوریتم تقسیم بندی بر اساس عملیات مورفولوژیکی برای تعیین مکان مرزهای خیابان انجام می شود. علاوه بر این، راه حلی برای استخراج لبه های محدود بر اساس زبری ابر نقطه پیشنهاد شده است. روش پیشنهادی در هر دو بخش جاده مستقیم و منحنی معتبر است و به دلیل استقلال هندسه اسکن آن، هم برای اسکنر لیزری و هم برای داده های سه بعدی دید استریو قابل استفاده است. روش پیشنهادی با موفقیت با دو مجموعه داده اندازه گیری شده توسط حسگرهای مختلف آزمایش شده است. اولین مجموعه داده مربوط به ابر نقطه ای است که توسط حسگر TOPCON در شهر Cudillero اسپانیا اندازه گیری شده است. مجموعه داده دوم مربوط به ابر نقطه ای است که توسط حسگر RIEGL در شهر هورن اتریش اندازه گیری شده است. روش استخراج، نرخ های کامل و صحت بالای 90 درصد و مقادیر کیفیت بالاتر از 85 درصد را در هر دو مجموعه داده مورد مطالعه ارائه می دهد.
کلید واژه ها:
محدودیت ها ; مرزهای جاده ؛ ابر نقطه سه بعدی ; تقسیم بندی استخراج ویژگی
1. معرفی
حسگرهای اسکنر لیزری و سیستمهای بینایی استریو اطلاعات سریع و دقیق سهبعدی (3D) را در مورد اشیا، ساختمانها و مناظر بدون برقراری تماس مستقیم با اشیاء اندازهگیری شده ارائه میکنند. این اطلاعات در چندین برنامه سنجش از دور مانند تولید مدل دیجیتال زمین [ 1 ]، مدلسازی سه بعدی شهر [ 2 ] و استخراج ویژگی [ 3] مفید است.]. سنسورهای اسکنر لیزری را می توان بر روی سکوهای هوایی (اسکنرهای لیزری هوایی، ALS) یا سکوهای زمینی (اسکنرهای لیزری زمینی، TLS) قرار داد. TLS را می توان به دو نوع استاتیک و پویا طبقه بندی کرد. جمعآوری دادههای TLS استاتیک از ایستگاههای پایه انجام میشود: یک حسگر در یک ایستگاه پایه ثابت است که ابر نقطه از آن به دست میآید. سنسورهای پویا TLS یا اسکنر لیزری سیار (MLS) در یک پلت فرم تلفن همراه نصب می شوند. حسگرهای MLS دارای یک سیستم ناوبری مبتنی بر سیستم های ماهواره ای ناوبری جهانی (GNSS) و واحدهای اندازه گیری اینرسی (IMU) هستند. این کار روی تقسیم بندی ابرهای نقطه سه بعدی تولید شده توسط حسگرهای MLS برای تعیین محدودیت های موجود در محیط های شهری متمرکز است. یک روش دقیق برای تعیین مکان حاشیهها، مرزهای جادهها و مبلمان شهری برای چندین کاربرد حیاتی است.4 ، 5 ]. علاوه بر این، تشخیص دقیق و خودکار موجودیت های نقشه برداری باعث صرفه جویی زیادی در زمان و هزینه در هنگام ایجاد و به روز رسانی پایگاه داده های نقشه برداری می شود [ 6]]. روند فعلی در استخراج ویژگی سنجش از دور، توسعه روش هایی تا حد امکان خودکار است. هدف توسعه الگوریتم هایی است که بتواند با کمترین مداخله انسانی در فرآیند، نتایج دقیقی به دست آورد. ایجاد یک روش کاملاً خودکار برای تعیین مکان و استخراج هر قطعه از مبلمان شهری در یک شهر به دلایل زیر دشوار است: مبلمان شهری دارای گونهشناسی ناهمگون است. هر شهر و تقریباً هر خیابان، مبلمان معمولی خود را دارد. اکثر کارهای مربوط به استخراج ویژگی روش های نیمه خودکاری را پیشنهاد کرده اند که در آن کاربر باید چند تنظیمات را برای تشخیص دقیق کنترل کند. نویسندگان این کار روشی نیمه خودکار را برای شناسایی حاشیه خیابان از طریق تقسیم بندی ابر نقطه اندازه گیری شده توسعه داده اند. علاوه بر این، روشی برای استخراج لبه های حاشیه بالایی و پایینی پیشنهاد شده است. ما سعی کردیم تعداد آستانه ها را به حداقل برسانیم. در روش فعلی، کاربر باید سه تنظیم را کنترل کند که مستقیماً به ویژگیهای منطقه مورد مطالعه بستگی دارد: ارتفاع حاشیه، تراکم نقطه در دیوار عمودی حاشیه، و ناهمواری. مقاله بصورت زیر مرتب شده است:بخش 2 مطالعات قبلی مرتبط با ما را خلاصه می کند. بخش 3 روش پیشنهادی برای تقسیم بندی ابر نقطه را نشان می دهد. و در بخش 4 نتایج به دست آمده در دو مورد مطالعه انجام شده با سنسورهای مختلف MLS به تفصیل بیان شده است. در نهایت، نتیجهگیریها و مسیرهای کاری آینده ما در بخش 5 توضیح داده شده است .
2. کارهای مرتبط
کاربردهای زیادی برای TLS از زمان ظهور این سیستم ها گزارش شده است. مدلسازی سهبعدی ساختمانها و محوطههای داخلی [ 7 ، 8 ]، تأیید هندسه تونلها [ 9 ]، تشخیص مبلمان شهری و اشیاء قطب مانند [ 10 ]، و مدلسازی و بازسازی درختان سهبعدی [ 11 ] برخی هستند. از برنامه هایی که حسگرهای TLS برای آنها استفاده شده است. علاوه بر این، چندین برنامه کاربردی برای ابرهای نقطه ای شناسایی شده از طریق حسگرهای MLS در ادبیات فعلی وجود دارد. آنها در کاربردهایی مانند استخراج دیوار عمودی [ 12 ]، مدل سازی نما [ 13 ]، تشخیص ردپای ساختمان [ 14] استفاده شده اند.]، و استخراج اشیاء قطب مانند، مانند علائم راهنمایی و رانندگی، تیر چراغ ها، یا تنه درختان [ 15 ، 16 ].
مقدار دادههای ابرهای نقطهای که توسط سیستمهای اسکن لیزری ارائه میشوند بسیار زیاد است و از مختصات ( x، y، z ) و اطلاعات اضافی مانند شدت، زمان سیستم موقعیتیابی جهانی (GPS) یا زاویه اسکن میلیونها نقطه تشکیل شده است. تجزیه و تحلیل و پردازش این داده ها از نظر محاسباتی پیچیده است. از این رو، به منظور کاهش زمان پردازش و پیچیدگی مجموعههای داده، ابرهای نقطه اغلب قبل از استفاده از الگوریتم برای استخراج ویژگی، نقشهبرداری یا تصمیمگیری سادهسازی میشوند. در برخی موارد، ابرهای نقطهای به چندین خوشه تقسیم میشوند که به صورت جداگانه تجزیه و تحلیل و طبقهبندی میشوند [ 17 ]. در [ 18] یک روش تقسیم بندی بر اساس تفاوت نرمال های یک نقطه و همسایگی آن در یک رویکرد چند مقیاسی پیشنهاد شده است. الگوریتم تفاوت نرمال ها برای تقسیم بندی یک ابر نقطه سه بعدی بزرگ به اشیاء مختلف در مقیاس های مختلف مانند اتومبیل ها، حاشیه جاده ها، درختان یا ساختمان ها کارآمد است. در کارهای دیگر، ابر نقطه سهبعدی به ابرهای کوچکتر دیگری تقسیم میشود که با تکههایی از نسخه اصلی تشکیل شدهاند تا از حجم دادهها کاسته شود. در [ 19 ]، به عنوان گام قبلی در تشخیص حاشیه های خیابان موجود، ابر نقطه اندازه گیری شده با استفاده از داده های زمان GPS به چندین مقطع جاده تقسیم می شود. گزینه دیگری برای مدیریت پذیرتر کردن ابر نقطه، تجزیه داده های اندازه گیری شده در یک شبکه وکسل سه بعدی است. در [ 20]، روشی ارائه شده است که تجزیه و تحلیل صحنه سه بعدی را از داده های جریانی انجام می دهد. این روش شامل یک تقسیم بندی سلسله مراتبی است که توسط چندین بخش بندی متوالی ابر نقطه تشکیل شده است. ابر نقطه اصلی به صورت پراکنده به ستون های بی نهایت بلند تبدیل شده است. هر ستون به بلوک های درشت کوانتیزه می شود و هر بلوک حاوی لیست پیوندی از وکسل های اشغال شده خود است. در این کار، وکسلها واحد اتمی در نظر گرفته میشوند که دستههای اشیا به آن اختصاص داده میشوند. ابر نقطه اصلی به یک تصویر شطرنجی دوبعدی نمایش داده می شود که سطح XY را نشان می دهد. بنابراین، اطلاعات سه بعدی به یک شطرنجی دو بعدی کاهش می یابد که در آن تکنیک های پردازش تصویر می تواند برای تعیین مکان ویژگی های هدف اعمال شود.
کار ارائه شده در این مقاله به مهار تشخیص از ابرهای نقطه MLS اختصاص دارد. در ادبیات کنونی مطالعات زیادی در رابطه با این موضوع وجود دارد. برخی از آنها از ابرهای نقطه داده ورودی به دست آمده از دید استریو استفاده می کنند. اخیراً، چندین نویسنده بر روی تشخیص علائم جادهها، خطوط و کنار جادهها در مناطق مستقیم و منحنی بر اساس دادههای بهدستآمده توسط دوربینهای استریو تمرکز کردهاند [ 21 ، 22 ]. همچنین برخی روشها در ادبیات کنونی برای شناسایی حاشیهها و کنار جادهها بر اساس ابرهای نقطهای که با حسگرهای TLS و MLS اندازهگیری میشوند، وجود دارد. در [ 23]، روشی برای تشخیص محدودیت ها با استفاده از داده های حسگر اسکنر سه بعدی ارائه شد. فرآیند تشخیص با وکسل کردن ابر نقطه و جداسازی نقاطی که نمایانگر زمین هستند، شروع می شود. بعداً، نقاط کاندید برای محدودیت ها بر اساس سه متغیر فضایی انتخاب می شوند: اختلاف ارتفاع، مقدار گرادیان و جهت گیری عادی. این مقدار گرادیان، یعنی نرخ تغییر ارتفاع محلی، با اعمال یک عملگر Sobel 3×3 در هر دو جهت افقی و عمودی در یک نقشه ارتفاعی دوبعدی به دست میآید. با استفاده از تکنیک حافظه کوتاه مدت، هر نقطه ای که در یک وکسل که برآمدگی عمودی آن در جاده قرار دارد، مثبت کاذب در نظر گرفته شده و حذف می شود. در نهایت، محدودیت با تنظیم یک مدل سهمی بر نقاط کاندید و اجرای یک الگوریتم RANSAC برای حذف مثبت های کاذب شناسایی می شود. عملکرد روش به انتخاب صحیح آستانه برای هر یک از سه متغیر مورد استفاده بستگی دارد. این روش نرخ تشخیص حدود 98 درصد را در دو مجموعه داده مورد مطالعه ارائه کرد.
ویس و دیت مایر [ 24 ] به طور خودکار موقعیت خطوط، پیاده روها، پست های بازتابی و نرده های محافظ را توسط داده های اسکنر لیزری خودرو به صورت عمودی و افقی تعیین کردند. تشخیص کرب از یک فیلتر گاوسی مرتبه سوم برای تیزتر کردن نمایه فاصله عمودی استفاده میکند که شکل حاشیه را مشخص میکند. این نمایه به بخش هایی با عرض معین تقسیم می شود و یک هیستوگرام تجمعی را تشکیل می دهد. محدودیتهای کاندیدا از طریق یک الگوریتم مبتنی بر هیستوگرام یافت میشوند که آن شکافهای هیستوگرام را که کاندیدای نمایش محدودیتها و نردههای محافظ هستند جستجو میکند. از آنجایی که هر نامزدی یک حاشیه معتبر نیست، مکانهای حاشیه واقعی با تجزیه و تحلیل ارتفاعات، شیبها و وقفههای هر چندضلعی تعیین میشوند.
بلتون و بائه [ 25] روشی را برای خودکارسازی شناسایی حاشیه ها و سیگنال ها با استفاده از چند مرحله پیشنهاد کرد. شطرنجی سازی ابر نقطه سه بعدی در ساختار شبکه ای دوبعدی امکان بررسی جداگانه هر سلول را فراهم می کند. ابتدا جاده استخراج می شود. سپس سلولهایی که در مجاورت جاده قرار دارند احتمالاً دارای محدودیتهایی هستند. نقاط در این سلول ها برای تعیین صفحه عمودی حاشیه استفاده می شود، که از آن یک مقطع عرضی 2 بعدی محاسبه می شود. بالا و پایین حاشیه به عنوان نقاطی تعیین میشوند که در بالاترین حد و پایینترین نقطه خط تعریف شده توسط دو نقطه دورتر در بخش دو بعدی قرار دارند. این روش دارای چندین محدودیت است. روش پیشنهادی نتایج خوبی برای تشخیص جادههای مقعر و غیر افقی ارائه نمیدهد. علاوه بر این،
یانگ و همکاران [ 19 ] تشخیص لبه را با تقسیم ابر نقطه اندازهگیری شده به بخشهای دوبعدی با استفاده از زمان GPS که در آن هر نقطه ثبت شده بود، انجام داد. آنها یک پنجره متحرک را روی این بخش های دوبعدی اعمال کردند تا جاده ها و مرزهای جاده را شناسایی کنند. حاشیه ها با تجزیه و تحلیل ارتفاع و تغییر شکل در پنجره های متحرک مورد مطالعه شناسایی شدند. آنها همچنین روشی را برای تشخیص نقاط مسدود شده ابر ارائه کردند، اما برخی مشکلات در مناطق با اشکال نامنظم شناسایی شد. مقدار پارامترها و طول پنجره متحرک برای عملکرد روش پیشنهادی حیاتی است.
کار اخیر هرویو و سهیلیان [ 26 ] روشی را برای استخراج حاشیه ها و رمپ ها و همچنین بازسازی داده های از دست رفته در مناطق پنهان شده توسط موانع در خیابان توصیف می کند. سیستمی برای بازسازی سطوح جاده و پیاده رو نیز پیشنهاد شده است. آنها یک صفحه را با گروهی از نقاط از ابر تنظیم می کنند و فاصله زاویه ای بین بردار معمولی و بردار z را محاسبه می کنند. پس از آن، یک مدل پیشبینی/تخمین برای تشخیص لبههای جاده اعمال میشود. این روش از کاربر میخواهد که به صورت دستی جهت حاشیه را انتخاب کند، که همیشه آسان نیست. این روش ممکن است در بخش های منحنی یا مسدود شکست بخورد. برای حل این مشکل، آنها یک راه حل نیمه خودکار را پیشنهاد می کنند که در آن کاربر باید برخی از نقاط مرز شناسایی نشده را برای بازسازی این بخش ها انتخاب کند.
در [ 27 ]، کومار و همکاران.روشی را برای تشخیص مرزهای جادهها در جادههای شهری و روستایی، که در آن سطح غیر جادهای از چمن و خاک تشکیل شده است و لبهها تنها با تغییر شیب به راحتی تعریف نمیشوند، توسعه دادند. شطرنجی دوبعدی شیب، بازتاب و عرض پالس ابر نقطه شناسایی شده انجام می شود. جریان بردار گرادیان و یک مدل بالون برای ایجاد یک مدل کانتور فعال پارامتری، که اجازه میدهد تا مرزهای جاده تعیین شود، ترکیب میشوند. تشخیص کنار جاده با استفاده از یک منحنی مار انجام می شود که بر اساس مسیر ناوبری یک ون سیار در امتداد بخش جاده آغاز می شود. منحنی مار با استفاده از یک فرآیند تکراری حرکت می کند تا زمانی که در کنار جاده ها، جایی که حداقل حالت انرژی قرار دارد، همگرا شود. این روش در مقاطع مستقیم آزمایش شده و نتایج خوبی ارائه کرده است، اما عملکرد آن در مقاطع منحنی ناشناخته است.
سرنا و مارکوتگی [ 28 ] روشی را برای ایجاد نقشه های موانع از ابرهای نقطه MLS پیشنهاد می کنند. آنها تصاویر محدوده ای را ایجاد می کنند که نقاط سه بعدی را نشان می دهد و از فیلترهای مورفولوژیکی برای حذف ساختارهای جدا شده و نه کشیده استفاده می کنند. رویکرد ما به نوعی شبیه به آن است، اگرچه تفاوتهای قابل توجهی وجود دارد زیرا ما از تصویر حداقل محدوده برای تشخیص پایینترین نقاط استفاده نمیکنیم و عملگرهای مورفولوژیکی به روشی متفاوت اعمال میشوند. ما همچنین چگالی و زبری را به عنوان پارامترهایی برای شناسایی حاشیه ها اضافه می کنیم.
به غیر از روشهایی که در ادبیات کنونی توضیح داده شده است، راهحلهای دیگری برای تشخیص محدودیت در بستههای نرمافزاری تجاری [ 29 ] وجود دارد، اما جزئیات فنی آنها را نمیتوان در ادبیات پیدا کرد. این راه حل ها کاملاً خودکار نیستند. کاربران باید برخی از اطلاعات اولیه را در اختیار نرم افزار قرار دهند.
3. روش شناسی
روش ارائه شده در این کار از مختصات نقطه سه بعدی ( x، y، z ) داده های ابری اندازه گیری شده توسط MLS به عنوان ورودی استفاده می کند. خروجی این روش یک ابر نقطه سه بعدی جدید است که توسط آن نقاطی که متعلق به یک حاشیه هستند تشکیل شده است. روش پیشنهادی برای تقسیمبندی دادههای MLS شامل چهار مرحله متوالی است که در شکل 1 نشان داده شده است .
3.1. پیش پردازش
پردازش داده های ابر نقطه سه بعدی به دلیل حجم زیاد اطلاعات مربوط به میلیون ها نقطه دشوار است. کار با این داده های خام MLS می تواند مقدار قابل توجهی از زمان و تلاش محاسباتی را شامل شود. بنابراین، در این مرحله اول، روش هایی برای تسهیل مدیریت ابر نقطه انجام می شود. پیش پردازش به سه مرحله اصلی تقسیم می شود: تقسیم ابر نقطه ای، تغییر سیستم مختصات و فاز فیلتر.
3.1.1. تقسیم ابر نقطه ای
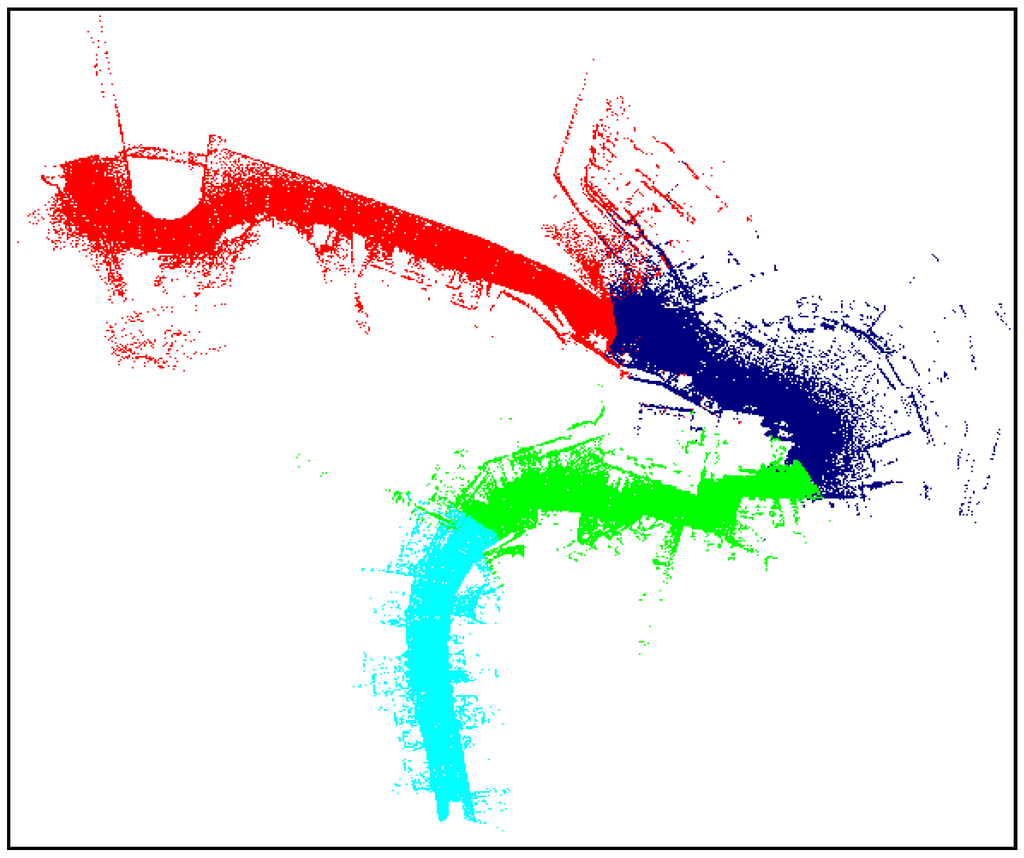
ابرهای نقطه اندازه گیری شده را به برش هایی تقسیم می کنیم و آنها را به صورت جداگانه پردازش می کنیم. در مورد سایت آزمایشی 1، ابر نقطه اصلی به چهار برش تقسیم میشود که هر یک توسط 1.5 میلیون نقطه تشکیل شده است ( شکل 2 ). مراحل زیر از روش پیشنهادی بر روی هر برش به طور جداگانه اعمال می شود.
3.1.2. جهت گیری و فیلترینگ
در این مرحله، یک تغییر سیستم مختصات انجام میشود و از یک سیستم مختصات جهانی که در آن MLS ابر نقطه را اندازهگیری میکند، به یک سیستم مختصات محلی منتقل میشود. ابرهای نقطه ثبت شده توسط حسگر MLS به درستی در یک سیستم مرجع جهانی با استفاده از یک سیستم ناوبری و یک واحد اندازهگیری اینرسی (IMU)، که مختصات را در یک قاب جهانی برای هر نقطه ارائه میکند، ارجاع جغرافیایی میشوند. ابرهای نقطه مورد استفاده در این کار با استفاده از طرح ریزی UTM در منطقه 29 برای مجموعه داده 1 و طرح ریزی UTM در منطقه 33 برای مجموعه داده 2 و ارتفاعات بیضی WGS84 در هر دو مورد ارجاع داده شده اند. مجموعه داده های MLS معمولاً بسیار بزرگ هستند و مدیریت آنها از نظر محاسباتی کار دشوار و پرهزینه ای است. به منظور سهولت و سرعت بخشیدن به هر عملیات در روش تقسیم بندی،
این روش به صورت جداگانه برای هر بخش که ابر نقطه اصلی در مرحله قبلی تقسیم شده است انجام می شود. هنگامی که سیستم مختصات تغییر کرد، یک فرآیند فیلتر برای کاهش اندازه ابر نقطه انجام می شود. هر نقطه ای که در زیر آنتن GPS قرار دارد دارای ارتفاع منفی است و فرض بر این است که نقاطی که نشان دهنده محدودیت ها هستند در زیر آنتن قرار دارند. به همین دلیل، فقط نقاطی با مقادیر مختصات z منفی محلی حفظ می شوند و نقاطی که روی ارتفاع آنتن GPS قرار دارند حذف می شوند. شکل 3 هر مرحله از مرحله پیش پردازش را در برش 1 از سایت آزمایشی 1 نشان می دهد.
3.2. شطرنجی سازی
در این مرحله، برای سادهسازی تحلیل و کاهش هزینه محاسباتی تقسیمبندی، ابر نقطه سهبعدی در یک شبکه دو بعدی که سطح XY را نشان میدهد، پیشبینی میشود و از یک ابر سهبعدی به یک تصویر شطرنجی دوبعدی حرکت میکند. علاوه بر این، در یک تصویر شطرنجی، می توان از تکنیک های تجزیه و تحلیل تصویر برای شناسایی پیکسل هایی که حاوی نقاطی هستند که به یک جاده تعلق دارند، استفاده کرد. کارایی فرآیند تشخیص به اندازه پیکسل تصویر ایجاد شده بستگی دارد. اندازه سلول همچنین به چگالی نقطه ابر نقطه بستگی دارد: هر چه چگالی ابر نقطه بالاتر باشد، وضوح تصویر می تواند بالاتر باشد، اما این می تواند به منابع محاسباتی بیشتری نیز نیاز داشته باشد. در هر صورت، فاصله شبکه باید به اندازه ای بزرگ باشد که تعداد قابل توجهی از نقاط را در خود داشته باشد، اما به اندازه ای کوچک باشد که فقط تعداد کمی از ویژگی های برجسته را در هر سلول اجازه دهد.25]. یک قانون تجربی برای تعیین اندازه سلول بهینه شبکه برای شطرنجی کردن هر ابر نقطه ایجاد شده است. این قانون به فاصله بین اسکن های متوالی در قسمت مرکزی ابر نقطه شناسایی شده بستگی دارد. بنابراین، اندازه سلول باید بین 4 تا 5 برابر بزرگتر از فاصله بین اسکن های متوالی باشد. ما دریافتهایم که این مقادیر به تشخیص مناسب حاشیههایی با تراکم اسکن و عرض محدود اجازه میدهند. برای هر پیکسل، دو مقدار محاسبه و به عنوان مقادیر دیجیتال (DVs) در شبکه ذخیره میشود: تفاوت بین بالاترین و پایینترین نقطه تمام نقاط موجود در سلول مورد مطالعه (در نتیجه تصویری شبیه به یک مدل سطح دیجیتال نرمال شده ( nDSM)، و تعداد نقاط موجود در هر سلول. بنابراین، مرحله شطرنجی دو تصویر ارائه می دهد: یکی با DV هایی که نشان دهنده اختلاف ارتفاع بین بالاترین و پایین ترین نقاط (از این به بعد به عنوان nDSM نامیده می شود) و دیگری که در آن DV هر پیکسل تعداد نقاط موجود در آن است (از این به بعد به عنوان چگالی تصویر نامیده می شود). به طور معمول، شدت پالس منعکس شده لیزری نیز در دادههای MLS موجود است، اما ما آن اطلاعات را برای این کار مرتبط نمیدانیم.
3.3. تقسیم بندی
این مرحله شامل تقسیم بندی ابر نقطه سه بعدی شطرنجی شده به منظور انتخاب پیکسل هایی از تصویر است که کاندیدای نمایش یک محدوده هستند. این به دو مرحله تقسیم می شود: آستانه و عملیات مورفولوژیکی. این دو مرحله یک تصویر دوبعدی باینری ارائه می کنند. نقاط ابر اندازهگیریشده که در پیکسلهای یکمقداری قرار دارند، استخراج میشوند و در نظر گرفته میشوند.
3.3.1. آستانه گذاری
چندین ویژگی در دادههای ابر نقطهای وجود دارد که میتوان از آنها برای بخشبندی ابر یا برای مسائل استخراج ویژگی، مانند حالت عادی و انحنا یا شدت لیزر منعکسشده و سایر موارد استفاده کرد. برای تقسیم بندی حاشیه، دو ویژگی ویژگی حاشیه واقعی در نظر گرفته شد: تفاوت بین بالاترین و پایین ترین نقطه یک حاشیه و چگالی نقطه در این عناصر. حاشیه ها دارای ارتفاع معینی (به طور معمول بالاتر از 5 سانتی متر و کمتر از 25 سانتی متر) و تراکم نقطه ای بالاتری نسبت به سطوح افقی به دلیل صورت عمودی خود هستند. شکل 4ارزش ویژگی های در نظر گرفته شده را برای چهار عنصر مختلف شهری در ابر نقطه مرتفع منفی نشان می دهد: حاشیه ها، جاده ها، نماها و پیاده روها. سطوحی که نسبت به پالس های لیزر متعامد هستند (نماها و حاشیه ها) چگالی بالاتری نسبت به سطوحی که تقریباً موازی با پالس های لیزر هستند (جاده ها و پیاده روها) نشان می دهند [30 ] . تراکم نقطه در حاشیه ها بیشتر از عناصر افقی مانند جاده ها و پیاده روها است، اما کمتر از سطوح بالاتر مانند نما است. علاوه بر این، تفاوت ارتفاع در حاشیه ها بسیار کمتر از سایر عناصر عمودی به عنوان نما است، اما کمی بیشتر از طبقات افقی است.
آن پیکسل هایی در تصویر nDSM که مقادیر دیجیتال آنها بین دو آستانه تعیین شده قرار می گیرد (Hmin و Hmax در معادله (1)) و DV تصویر چگالی آنها بالاتر از آستانه حداقل (Dmin) است (معادله (2)) به عنوان محدودیت انتخاب می شوند. پیکسل ها این اطلاعات در یک تصویر باینری ذخیره میشود که در آن پیکسلها با 1 برچسبگذاری میشوند، اگر نشاندهنده پیکسلهای کاندید محدود باشند و در غیر این صورت، 0 را نشان میدهند.
���� < ����[�,�] < ����
������� ����� [�,�] > ���� (������/�����)
پیکسل های متناظر با پس زمینه (با ارزش 0) در مرحله بعدی روش تشخیص در نظر گرفته نمی شوند. علاوه بر آن محدودیتها، پیکسلهای بیشتری وجود خواهند داشت که شرایط تحمیلشده را برآورده میکنند و باید از طریق فرآیند زیر حذف شوند.
3.3.2. عملیات مورفولوژیکی
یک عملگر باز مورفولوژیکی [ 31 ] روی تصویر باینری اعمال میشود تا گروههایی از پیکسلها را حذف کند که نشاندهنده محدودیت نیستند. در عملیات اتساع، هر پیکسلی که با پیکسل های کاندید تصویر باینری متصل می شود، به مجموعه پیکسل های کاندید محدود اضافه می شود. این عملیات مورفولوژیکی در یک پنجره 3×3 اعمال می شود. نتایج هر مرحله از روش را می توان در شکل 5 مشاهده کرد .
3.3.3. ابر نقطه تقسیم شده
هدف نهایی این روش، تقسیم بندی حاشیه های موجود در ابر نقطه است. بنابراین، هنگامی که تشخیص محدود در تصویر باینری انجام شد، زمان حرکت از تصویر شطرنجی دوبعدی به ابر نقطه سه بعدی فرا می رسد. ابر نقطه جدید فقط از آن نقاطی تشکیل شده است که به ابر منفی Z-value تعلق دارند و مختصات آنها ( x, y ) در داخل پیکسل های یک مقداری تصویر باینری به دست آمده در مرحله قبلی است. ابر نقطه تقسیم شده در سیستم مختصات محلی است. به منظور ترکیب ابر نقطه اندازهگیریشده و قسمتبندیشده، سیستم مختصات جهانی اصلی بازیابی میشود و هر دو ابر روی هم قرار میگیرند ( شکل 6 ).
3.4. خشونت
استخراج لبه های حاشیه بالا و پایین بر اساس ناهمواری ابر نقطه است. در این مطالعه، زبری ( Ri ) برای هر نقطه محاسبه می شود. این مقدار از نقاطی اندازه گیری می شود که در کره ای با شعاع r در مرکز نقطه مورد مطالعه ( Pi ) قرار دارند . این به عنوان فاصله بین نقطه مورد مطالعه P i و حداقل مربع بهترین صفحه برازش شامل P i و نقاط همسایگی آن در داخل کره شعاع r تعریف می شود [ 32 ]. این شبیه به سطوح نصب شده محلی (LoFS) است که در [ 33] پیاده سازی شده است]. کمترین مقادیر زبری مربوط به سطوح مسطح است در حالی که مقادیر زبری بالاتر در آن عناصر با اشکال نامنظم اتفاق می افتد [ 16 ]. مشاهده شده است که در اندازه محلههای خاص، نقاطی که به لبههای حاشیه تعلق دارند نسبت به نقاطی که دیوارهای حاشیه عمودی را نشان میدهند، زبری بیشتری دارند. همانطور که در شکل 7 مشاهده می شود ، برای اندازه محله نزدیک به ارتفاع حاشیه (بین 10 تا 15 سانتی متر)، ناهمواری در لبه های حاشیه بسیار متفاوت از دیوارهای حاشیه است. با این حال، در محلههای بزرگ (بالاتر از 25 سانتیمتر) هر دو لبه و دیوارهای حاشیه عملکرد مشابهی دارند و تشخیص این طبقات را در این شرایط دشوار میسازد. بنابراین، یک آستانه ( لبه های Rدر معادله (3)) برای استخراج نقاطی که نشان دهنده لبه های حاشیه هستند، ایجاد شده است. نتیجه استخراج لبه بالا و پایین در قسمتی از سایت تست 1 در شکل 8 قابل مشاهده است .
����ℎ����(��)>������
4. نتایج و بحث
4.1. سایت آزمون 1: بازنمایی محدود و ارزیابی دقت
ابر نقطه از سایت آزمایشی 1 در Cudillero، شهری در شمال اسپانیا اندازهگیری شد. این یک دهکده ماهیگیری معمولی با خانه های کم ارتفاع، خیابان های بسیار باریک، گاهی اوقات فقط یک طرفه، و پیاده روهای بسیار تنگ است. این ابر نقطه ای یک خیابان 400 متری را با دو بخش مستقیم و منحنی پوشانده است ( شکل 9 ).
وجود دیوارهای سنگی ساختمان، کامیون ها و سایر موانع، مانند نرده ها یا تراس بار، تشخیص کنار جاده را دشوارتر می کند. ابر نقطه اندازه گیری شده بیش از 6 میلیون نقطه را شامل می شود. مقادیر تنظیمات الگوریتم مورد استفاده در سایت آزمایشی 1 در جدول 1 فهرست شده است . در کار فعلی اندازه پیکسل روی 20 سانتی متر × 20 سانتی متر تنظیم شد زیرا میانگین فاصله بین خطوط اسکن متوالی تقریباً 4 سانتی متر بود. با توجه به اختلاف ارتفاع، Hmin روی 0.05 متر و Hmax روی 0.20 متر تنظیم شد. حداقل تراکم نقطه بر روی 20 نقطه در هر پیکسل تنظیم شد و پارامترهای مربوط به مقدار زبری و اندازه همسایگی به ترتیب در 2.5 و 12 سانتی متر در هر دو محل آزمایش ثابت شد.
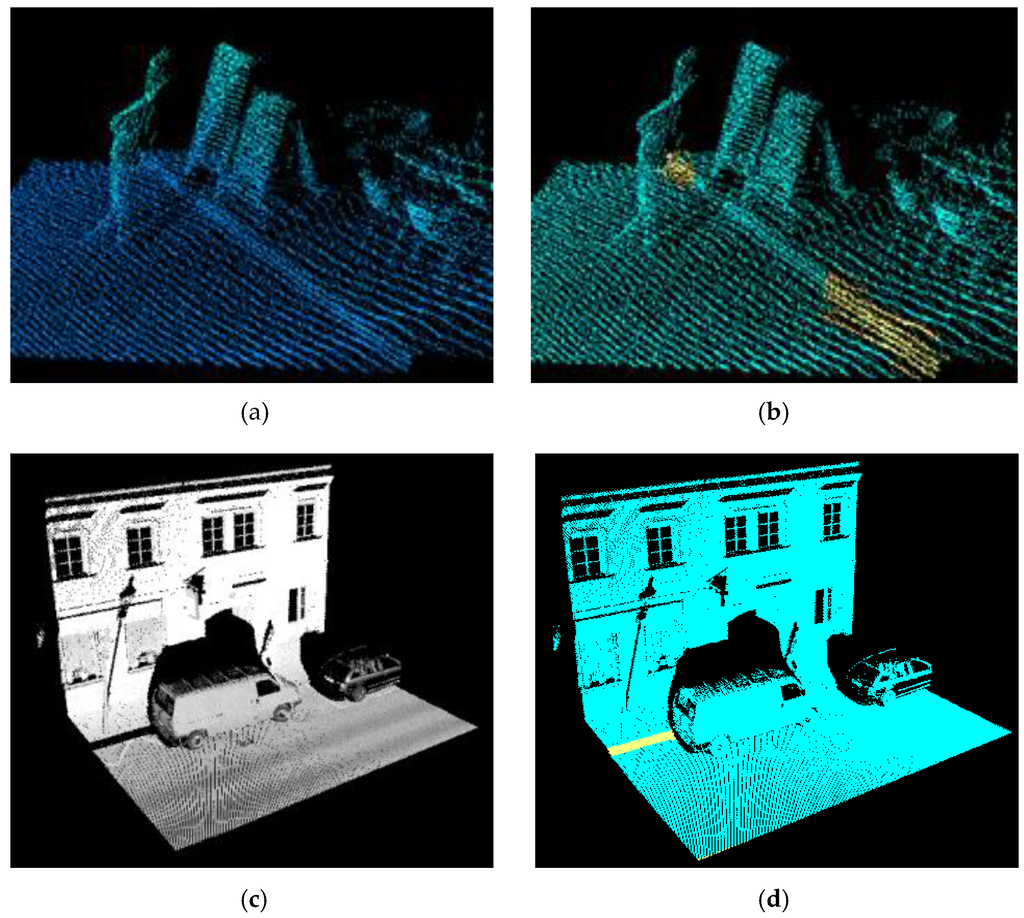
برای تجزیه و تحلیل بصری نتایج بهدستآمده در سایت آزمایشی 1، حاشیههای شناساییشده بر روی یک تصویر ارتو از ناحیه مورد مطالعه قرار گرفتهاند. نتایج روش تقسیمبندی لبه حاشیهای به طور کامل در سه بخش نشان داده شده است: A، B، و C. جزئیات A یک بخش جاده را با یک پیادهرو در یک طرف و یک دیوار سنگی در طرف دیگر، بدون پیادهرو نشان میدهد. جزئیات B یک بخش منحنی از یک خیابان است و جزئیات C روی خیابانی با پیاده روها در دو طرف جاده متمرکز شده است. برای هر جزئیات، سه تصویر نشان داده شده است: نمای سطح خیابان ( شکل 10 a,d,g)، ابر نقطه اصلی جزئیات ( شکل 10 b,e,h) و نتیجه تقسیم بندی که در آن حاشیه ها به رنگ زرد و پس زمینه به رنگ آبی نشان داده شده است ( شکل 10ج، ف، من). مشاهده می شود که روش پیشنهادی به درستی حاشیه های موجود را در مقاطع مستقیم و منحنی تشخیص داده است.
به منظور ارزیابی دقت تشخیص حاشیه، استخراج دستی مرزهای جاده از ابر نقطه اصلی انجام شد. این با دیجیتالی کردن مرزهای جاده مشاهده شده از ابر نقطه به عنوان داده های حقیقت زمین انجام شد. برای سایت آزمایشی 1، حقیقت زمین تقریباً 520 متر طول دارد. ارزیابی نتایج با مقایسه حاشیههای استخراجشده با روش پیشنهادی با حقیقت زمینی قبلاً تدوینشده انجام شد. این با استفاده از سه شاخص که معمولاً در ارزیابی تشخیص جاده استفاده میشوند انجام شد: کامل بودن (معادله (4))، درستی (معادله (5)) و کیفیت (معادله (6)) [34 ، 35 ] :
������������=length of matched referencelength of reference = ����+��
�����������= length of matched extractionlength of extraction=����+��
�������=length of matched extractionlength of extracted+unmatched reference= ����+��+��
که در آن TP (مثبت واقعی) طول حاشیه شناسایی شده را نشان می دهد که با کنار جاده مرجع مطابقت دارد، FP (مثبت کاذب) طول حاشیه های شناسایی شده را نشان می دهد که با حقیقت زمین مطابقت ندارند و FN (منفی کاذب) نشان دهنده طول کل است. محدودیت های کشف نشده ای که در حقیقت زمین وجود دارد.
روش پیشنهادی 525.1 متر را به عنوان حاشیه از داده های سایت آزمایش 1 شناسایی کرد. 35.8 متر از آن نشان دهنده FP ناشی از پوشش گیاهی کم و عناصری با هندسه مشابه با حاشیه ها، مانند سنگ های جدا شده، کف ماشین، و پله ها است. 489.3 متر از حاشیه کشف شده با حاشیه حقیقت زمین مطابقت دارد و 30.2 متر متعلق به حقیقت زمین به دلیل مسدود شدن حاشیه توسط پوشش گیاهی کم یا وجود عناصر دیگر مانند عابران پیاده یا سطل زباله بر روی حاشیه شناسایی نشد. شکل 11 الف، ب). در این موارد به دلیل تغییر در هندسه حاشیه امکان تشخیص وجود ندارد. شاخص های دقت روش ما برای سایت آزمایشی 1 در جدول 2 خلاصه شده است. مشاهده می شود که کامل بودن و صحت هر دو بالای 90 درصد (به ترتیب 94.2 و 93.2 درصد) و ارزش کیفیت 88.11 درصد است.
4.2. سایت آزمون 2: بازنمایی و ارزیابی دقت محدود
سایت آزمایشی 2 مربوط به یک بخش خیابانی 200 متری در هورن، شهری در شمال شرقی اتریش است ( شکل 12 ). این یک منطقه شهری معمولی است که دارای جاده ای با مرزهای جاده ای ساختار یافته به شکل حاشیه و رمپ در معابر و گاراژ است. یک طرف این خیابان برای پارکینگ در نظر گرفته شده است که باعث ایجاد سایه در ابر نقطه می شود و تشخیص حاشیه ها را چالش برانگیز می کند. ابر نقطه مربوط به سایت تست 2 از بیش از 11.5 میلیون نقطه تشکیل شده است. مقادیر پارامترهای مورد استفاده برای تست سایت 2 در جدول 3 آمده است. اندازه پیکسل در 5 سانتی متر × 5 سانتی متر ثابت شد زیرا میانگین فاصله بین خطوط اسکن متوالی در این محل آزمایش حدود 1 سانتی متر است. با توجه به اختلاف ارتفاع، Hmin روی 0.10 متر و Hmax روی 0.20 متر تنظیم شد. حداقل چگالی نقطه روی 20 نقطه در هر پیکسل تنظیم شد. همانطور که در سایت آزمایش 1، زبری و اندازه همسایگی به ترتیب 2.5 و 12 سانتی متر ثابت شد.
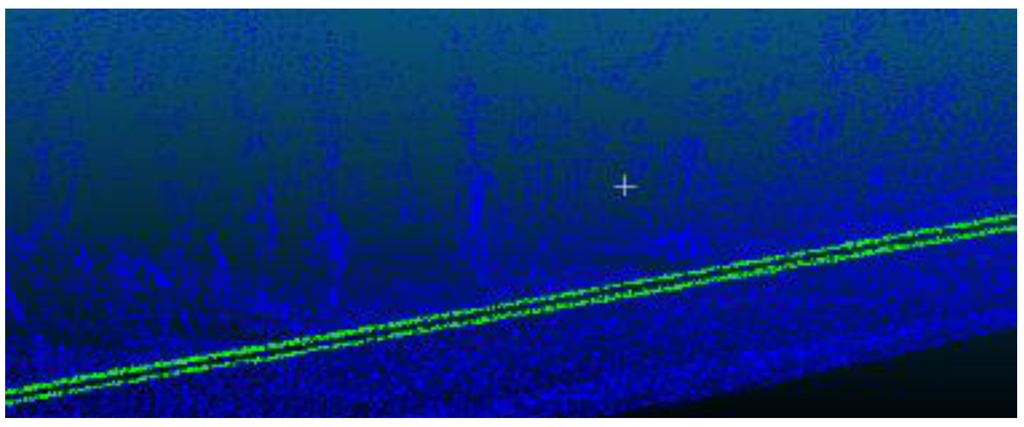
نتیجه روش پیشنهادی به تفصیل در شکل 13 نشان داده شده است . ردیف اول (جزئیات A) بخشی از خیابان را نشان می دهد که در آن یک حاشیه خمیده و یک پیاده رو وجود دارد که توسط سایه یک ماشین پارک شده مسدود شده است. روش پیشنهادی، مقطع منحنی را به درستی تعیین می کند، اما در پیاده رو مسدود شده به دلیل کمبود اطلاعات، امکان تعیین حاشیه وجود ندارد. جزئیات B (ردیف دوم) بر روی یک گذرگاه گورخر متمرکز شده است. در این بخش جاده، به دلیل ارتفاع متفاوت این عناصر، این روش به درستی محدودیتهای موجود را تعیین کرده است، اما رمپها را به گذرگاه گورخری تعیین نکرده است.
همانطور که در سایت آزمایشی 1، حقیقت زمین با دیجیتالی کردن حاشیه های مشاهده شده از ابر نقطه برای ارزیابی دقت تقسیم بندی محدود ایجاد شد. حقیقت زمینی بیش از 220 متر طول دارد. شاخصهای کامل، صحت و کیفیت با مقایسه حاشیههای تقسیمبندی شده با حقیقت زمینی بهدست آمد. روش پیشنهادی 231.61 متر را بهعنوان محدودیتهایی از دادههای سایت آزمایش 2 نشانگذاری کرد. از این مقدار، 21.4 متر نشان دهنده مثبت کاذب ناشی از عناصر با هندسه شبیه به حاشیه است، مانند کف ماشین و پله ها ( شکل 14 ). در مجموع، 14.55 متر از حاشیه های موجود در داده های مرجع با روش پیشنهادی به دلیل فاصله کوتاه موجود بین اتومبیل های پارک شده یا سایر عناصر روی حاشیه ها شناسایی نشد ( شکل 11 را ببینید).ج، د). بیش از 210.21 متر از حاشیه شناسایی شده با حاشیه حقیقت زمین مطابقت داشت. پارامترهای مورد استفاده برای اندازه گیری دقت روش ما در جدول 4 نشان داده شده است . روش پیشنهادی به کاملیت 93.52 درصد، صحت 90.76 درصد و کیفیت 85.42 درصد دست یافت.
4.3. تجزیه و تحلیل حساسیت پارامترها
حساسیت هر پارامتر به منظور تعیین محدوده مقادیری که هر پارامتر می تواند بدون تأثیر بر نتیجه روش بگیرد، تجزیه و تحلیل شده است ( جدول 5 ). جدول 6 مقادیر سه متغیر مورد استفاده برای تخمین دقت را در زمانی که آن پارامترها خارج از محدوده نشان داده شده در جدول 5 هستند نشان می دهد . برخی از انحرافات از نتایج بهینه را می توان قدردانی کرد.
با توجه به اندازه پیکسل، نتیجه گرفته شده است که بهترین نرخ های کیفیت با اندازه پیکسل بین 4 تا 5 برابر فاصله متوسط بین خطوط اسکن متوالی به دست می آید. با توجه به اختلاف ارتفاع، مقادیر بهینه Hmin و Hmax به نوع حاشیه موجود در منطقه مورد مطالعه بستگی دارد. می توان خلاصه کرد که Hmin می تواند مقادیری بین 5 سانتی متر تا 10 سانتی متر و Hmax بین 15 سانتی متر تا 20 سانتی متر داشته باشد. توصیه می شود حداقل تراکم نقطه را بین 15 تا 25 نقطه در پیکسل تنظیم کنید تا نقاطی را در سطوح صاف، عمدتاً جاده ها و پیاده روها، به عنوان حاشیه در نظر نگیرید. با توجه به زبری، همانطور که در شکل 7 مشاهده می شود ، مقادیر زبری می توانند مقادیری بین 2 تا 2.5 با اندازه های همسایگی بین 10 تا 20 سانتی متر داشته باشند بدون اینکه بر کیفیت استخراج نهایی تأثیر بگذارند.
5. نتیجه گیری ها
در این مقاله، روشی برای شناسایی محدودیت ها از داده های ابری MLS ارائه شده است. این روش شامل شطرنجی کردن ابر نقطه به عنوان مرحله قبلی برای اعمال تکنیک های مختلف پردازش تصویر مانند آستانه گذاری و عملیات مورفولوژیکی باز برای تعیین محل حاشیه ها در تصویر است.
این روش در دو مجموعه داده اندازهگیری شده توسط حسگرهای MLS مختلف، هر دو مربوط به محیطهای شهری، آزمایش شد. نتایج بهدستآمده نشاندهنده شاخصهای کامل و صحت بالاتر از 90 درصد و مقدار کیفیت حدود 85 درصد در هر دو محل آزمایش است. از این نتایج، می توان نتیجه گرفت که روش پیشنهادی می تواند مفید باشد: (1) برای تشخیص محدودیت در بخش های جاده مستقیم و منحنی و (2) برای داده های MLS و ابرهای نقطه دید استریو، به دلیل استقلال آن با هندسه اسکن. . با این حال، مقابله با محدودیتهای مسدود در مناطق سایهدار و موارد مثبت کاذب ناشی از عناصری با ویژگیهای مشابه حاشیهها هنوز دشوار است. در آینده نزدیک، ویژگیهای دیگری برای تقویت این روش از طریق کاهش نرخ مثبت کاذب، تشخیص بهتر لبهها، گنجانده خواهد شد.
منابع
- واک، آر. Wimmer، A. مدلهای زمین دیجیتال از دادههای اسکنر لیزری هوا – رویکرد مبتنی بر شبکه. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2002 ، 34 ، 293-296. [ Google Scholar ]
- ربکا، او. طلا، سی. Kidner، D. مدل سازی شهر سه بعدی از داده های LiDAR. در پیشرفت در سیستم های اطلاعات جغرافیایی سه بعدی . Springer: برلین، آلمان، 2008; صص 161-175. [ Google Scholar ]
- پریستنال، جی. جعفر، ج. دانکن، الف. استخراج ویژگیهای شهری از مدلهای سطح دیجیتال LiDAR. محاسبه کنید. محیط زیست سیستم شهری 2000 ، 24 ، 65-78. [ Google Scholar ] [ CrossRef ]
- اشمیت، آر. ویسر، اچ. شولنبرگ، پ. گولینگر، اچ. رانندگی خودمختار در مسیرهای آزمایش خودرو: بررسی اجمالی، اجرا و نتایج. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE، دیربورن، MI، ایالات متحده آمریکا، 3 تا 5 اکتبر 2000. صص 152-155.
- اورمسون، سی. آنهالت، جی. باگنل، دی. بیکر، سی. بیتنر، آر. کلارک، ام. دولان، جی. داگینز، دی. گالاتالی، ت. Geyer, C. رانندگی خودمختار در محیط های شهری: رئیس و چالش شهری. ربات صحرایی جی. 2008 ، 25 ، 425-466. [ Google Scholar ] [ CrossRef ]
- دینگ، ایکس. کانگ، دبلیو. کوی، جی. Ao, L. استخراج خودکار شبکه جاده از تصاویر هوایی. در مجموعه مقالات اولین سمپوزیوم بین المللی سیستم ها و کنترل در هوا فضا و فضانوردی، هاربین، چین، 19 تا 21 ژانویه 2006.
- چنگ، X.-J. ژانگ، H.-F. Xie, R. مطالعه روی روش مدلسازی اسکن لیزری سه بعدی برای ساختمانهای تاریخی در مقیاس بزرگ. در مجموعه مقالات کنفرانس بین المللی کاربردهای کامپیوتری و مدلسازی سیستم (ICCASM)، تایوان، چین، 22 تا 24 اکتبر 2010. صص V7-573–V7-577.
- گونزالس-آگیلرا، دی. مووز، ا. لاهوز، ج. هررو، جی. کورچون، ام. گارسیا، ای. ثبت و مدل سازی غارهای پارینه سنگی از طریق اسکن لیزری. در مجموعه مقالات کنفرانس بین المللی سیستم های اطلاعات جغرافیایی پیشرفته و خدمات وب، کانکون، مکزیک، 1-7 فوریه 2009. صص 19-26.
- آرگوئل فراگا، آر. اوردونز، سی. گارسیا کورتس، اس. Roca-Pardiñas, J. برنامه ریزی اندازه گیری برای تونل های مقطع دایره ای با استفاده از اسکن لیزری زمینی. خودکار ساخت و ساز 2013 ، 31 ، 1-9. [ Google Scholar ] [ CrossRef ]
- کابو، سی. اوردونز، سی. گارسیا کورتس، اس. مارتینز، جی. الگوریتمی برای تشخیص خودکار اجسام مبلمان خیابانی قطب مانند از ابرهای نقطه اسکنر لیزری سیار. ISPRS J. Photogramm. Remote Sens. 2014 ، 87 ، 47-56. [ Google Scholar ] [ CrossRef ]
- پارک، اچ. لیم، اس. تریدر، جی. ترنر، R. بازسازی سطح سه بعدی داده های اسکنر لیزری زمینی برای جنگلداری. در مجموعه مقالات سمپوزیوم بین المللی علوم زمین و سنجش از دور IEEE (IGARSS)، هونولولو، HI، ایالات متحده آمریکا، 25 تا 30 ژوئیه 2010. صص 4366-4369.
- روتزینگر، ام. البرینک، SO; پو، اس. Vosselman, G. استخراج خودکار دیوارهای عمودی از داده های اسکن لیزری متحرک و هوابرد. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2009 ، 38 ، W8. [ Google Scholar ]
- روتزینگر، ام. هوفل، بی. اود البرینک، اس. Vosselman, G. امکان سنجی استخراج ردپای نما از داده های اسکن لیزری سیار. فتوگرام فرنرکوند. اطلاعات جغرافیایی 2011 ، 2011 ، 97-107. [ Google Scholar ] [ CrossRef ]
- حمودی، ک. دورنایکا، اف. پاپرودیتیس، N. استخراج ردپای ساختمان از ابرهای نقطه سه بعدی با استفاده از اسکن لیزری زمینی در سطح خیابان. ISPRS/CMRT09 2009 ، 38 ، 65-70. [ Google Scholar ]
- یونگتائو، ی. لی، جی. هایان، جی. چنگ، دبلیو. Jun, Y. استخراج نیمه خودکار تیرهای چراغ خیابان از ابرهای نقطه LiDAR متحرک. IEEE Trans. Geosci. Remote Sens. 2015 ، 53 ، 1374–1386. [ Google Scholar ]
- رودریگز-کوئنکا، بی. گارسیا کورتس، اس. اوردونز، سی. آلونسو، MC تشخیص و طبقه بندی خودکار اشیاء قطب مانند در داده های ابر نقطه شهری با استفاده از یک الگوریتم تشخیص ناهنجاری. Remote Sens. 2015 ، 7 ، 12680–12703. [ Google Scholar ] [ CrossRef ]
- دویار، بی. آندروود، جی. ولاسکین، وی. کوادروس، ا. سینگ، اس. خط لوله ای برای تقسیم بندی و طبقه بندی ابرهای نقطه سه بعدی. در رباتیک تجربی ; Springer: برلین، آلمان، 2014; صص 585-600. [ Google Scholar ]
- یوآنو، ی. طاعتی، بی. هاراپ، آر. گرین اسپن، M. تفاوت نرمال ها به عنوان یک عملگر چند مقیاسی در ابرهای نقطه سازمان نیافته. در مجموعه مقالات دومین کنفرانس بین المللی 2012 در مورد تصویربرداری سه بعدی، مدلسازی، پردازش، تجسم و انتقال (3DIMPVT)، زوریخ، سوئیس، 13 تا 15 اکتبر 2012. ص 501-508.
- یانگ، بی. نیش، ال. لی، جی. استخراج نیمه خودکار و ترسیم جاده های سه بعدی صحنه خیابان از ابرهای نقطه اسکن لیزری متحرک. ISPRS J. Photogramm. Remote Sens. 2013 ، 79 ، 80-93. [ Google Scholar ] [ CrossRef ]
- متعجب.؛ مونوز، دی. باگنل، جی. هبرت، ام. تحلیل صحنه سه بعدی کارآمد از جریان داده ها. در مجموعه مقالات کنفرانس بین المللی IEEE 2013 در مورد رباتیک و اتوماسیون (ICRA)، کارلسروهه، آلمان، 6 تا 10 مه 2013. ص 2297-2304.
- رویی، ج. راینهارد، ک. توبی، وی. تشخیص و ردیابی خط Shigang، W. با استفاده از مدل خط جدید و تبدیل فاصله. ماخ Vis. Appl. 2011 ، 22 ، 721-737. [ Google Scholar ] [ CrossRef ]
- لابایراد، آر. دورت، جی. Aubert, D. آشکارساز خط چند مدلی که تکینگی های جاده را کنترل می کند. در مجموعه مقالات کنفرانس سیستم های حمل و نقل هوشمند IEEE 2006، تورنتو، ON، کانادا، 17 تا 20 سپتامبر 2006. صص 1143-1148.
- ژائو، جی. شناسایی و ردیابی Yuan, J. Curb با استفاده از اسکنر 3d-LiDAR. در مجموعه مقالات نوزدهمین کنفرانس بین المللی IEEE در مورد پردازش تصویر (ICIP)، اورلاندو، FL، ایالات متحده، 30 سپتامبر تا 3 اکتبر 2012. صص 437-440.
- ویس، تی. Dietmayer, K. تشخیص خودکار اشیاء زیرساخت ترافیک برای تولید سریع نقشه های دیجیتال دقیق با استفاده از اسکنرهای لیزری. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE، استانبول، ترکیه، 13 تا 15 ژوئن 2007. ص 1271–1277.
- بلتون، دی. بائه، K.-H. خودکارسازی پس پردازش ابرهای نقطه اسکن لیزری زمینی برای بررسی ویژگی های جاده. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2010 ، 38 ، 74-79. [ Google Scholar ]
- هرویو، آ. سهیلیان، ب. مدلسازی نیمه اتوماتیک جاده/روسازی با استفاده از اسکن لیزری سیار. شهر ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2013 ، 2 . [ Google Scholar ] [ CrossRef ]
- کومار، پی. McElhinney، CP; لوئیس، پی. McCarthy, T. یک الگوریتم خودکار برای استخراج لبه های جاده از داده های LiDAR موبایل زمینی. ISPRS J. Photogramm. Remote Sens. 2013 ، 85 ، 44-55. [ Google Scholar ] [ CrossRef ]
- سرنا، ا. مارکوتگی، ب. تشخیص دسترسی شهری از دادههای اسکن لیزری سیار. ISPRS J. Photogramm. Remote Sens. 2013 ، 84 ، 23-32. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نرم افزار Trident Trimble. در دسترس آنلاین: http://kmcgeo.com/Products/Trident/Trident_Feature_Table.pdf (دسترسی در 5 مارس 2016).
- لهتوماکی، ام. جااکولا، ا. Hyyppä، J.; کوکو، ا. کارتینن، اچ. تشخیص اشیاء قطب مانند عمودی در محیط جاده با استفاده از دادههای اسکن لیزری مبتنی بر وسیله نقلیه. Remote Sens. 2010 , 2 , 641-664. [ Google Scholar ] [ CrossRef ]
- گونزالس، آرسی Woods, RE Digital Image Processing ; Prentice Hall: Englewood Cliff، NJ، ایالات متحده آمریکا، 2002. [ Google Scholar ]
- صفحه اصلی ویکی مقایسه ابری. در دسترس آنلاین: http://www.cloudcompare.org/doc/wiki/index.php?title=Main_Page (در 17 دسامبر 2015 دسترسی پیدا کرد).
- مونگوس، دی. لوکاچ، ن. Žalik، B. استخراج زمین و ساختمان از داده های LiDAR بر اساس پروفایل های مورفولوژیکی متفاوت و سطوح برازش محلی. ISPRS J. Photogramm. Remote Sens. 2014 ، 93 ، 145-156. [ Google Scholar ] [ CrossRef ]
- هیپکه، سی. مایر، اچ. ویدمن، سی. Jamet, O. ارزیابی استخراج خودکار جاده. بین المللی قوس. فتوگرام Remote Sens. 1997 , 32 , 151-160. [ Google Scholar ]
- هو، جی. رازدان، ع. فمینی، JC; کوی، ام. Wonka, P. استخراج شبکه جاده و تشخیص تقاطع از تصاویر هوایی با ردیابی ردپای جاده. IEEE Trans. Geosci. Remote Sens. 2007 , 45 , 4144-4157. [ Google Scholar ] [ CrossRef ]

شکل 1. نمودار جریان روش پیشنهادی.
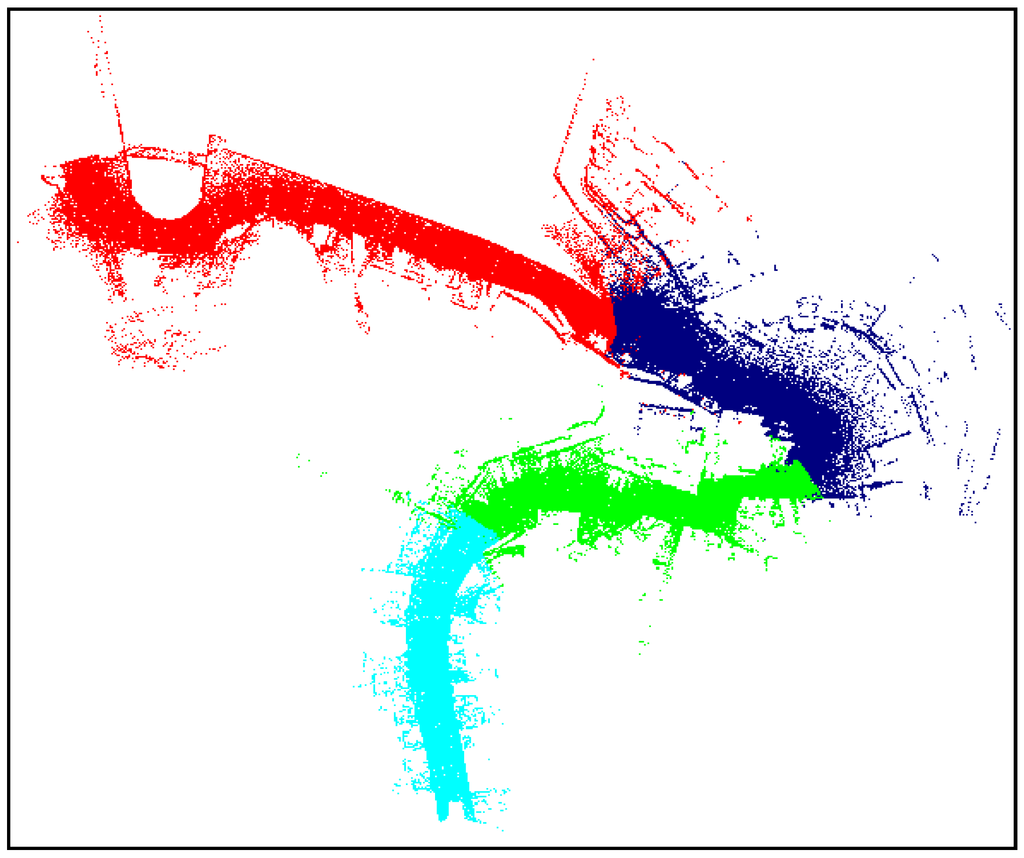
شکل 2. ابر نقطه اصلی MLS در مجموعه داده 1 به چهار بخش (با رنگ های مختلف نشان داده شده) تقسیم شده است.

شکل 3. ( الف ) ابر نقطه ای مربوط به برش 1 در سایت آزمایشی 1 در سیستم مختصات UTM. ( ب ) پس از تغییر سیستم مختصات؛ ( ج ) فیلتر کردن در منفی. و ( د ) ارتفاعات مثبت.
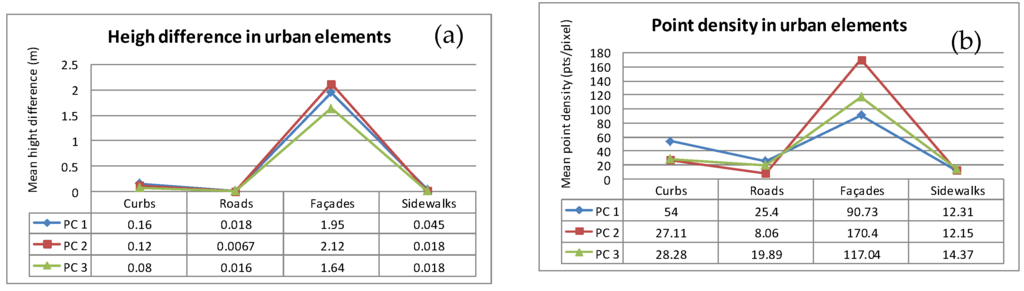
شکل 4. اختلاف ارتفاع ( a ) و میانگین تراکم نقطه ( b ) چهار عنصر شهری در سه ابر نقطه متفاوت (PC).
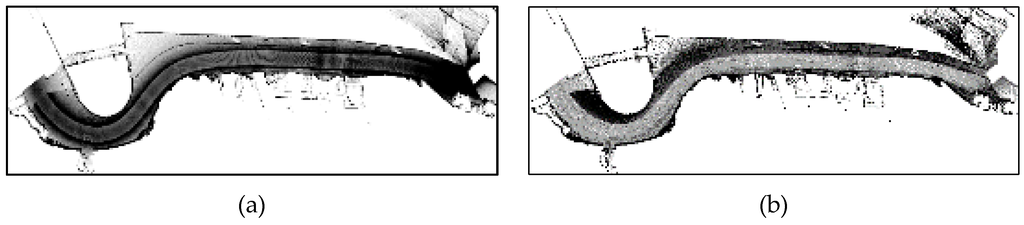

شکل 5. نتایج بهدستآمده در هر مرحله از روش پیشنهادی برای شناسایی حاشیهها برای برش 1 از مجموعه داده 1: ( a , b ) چگالی و تصویر nDSM هستند و ( c , d ) نتایج آستانهگذاری و مورفولوژیکی هستند. عملیات، به ترتیب.
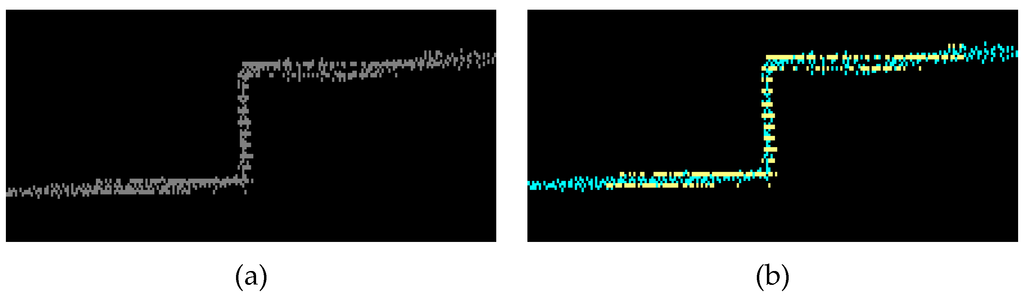
شکل 6. ( الف ) نمایه یک حاشیه در ابر نقطه اندازهگیری شده و ( ب ) حاشیه تقسیمبندی شده، با حاشیه شناساییشده به رنگ زرد و نقاط پسزمینه به رنگ آبی.

شکل 7. مقادیر زبری در دیوارهای حاشیه و لبه های حاشیه ( محور عمودی ) برای اندازه های مختلف محله ( محور افقی ، بر حسب سانتی متر).

شکل 8. در رنگ سبز، لبه های حاشیه بالایی و پایینی شناسایی شده در سایت تست 1.
شکل 9. عکس هوایی و موقعیت محل آزمایش 1.

شکل 10. ( a – i ) سه نمای دقیق (A، B و C) از محل آزمایش 1. ستون اول تصاویر سطح خیابان را نشان می دهد ( شکل 10 a,d,g). ستون دوم نشان دهنده ابر نقطه ثبت شده اصلی است ( شکل 10 b,e,h). نتایج روش توسعه یافته تشخیص در ستون سوم نشان داده شده است ( شکل 10 c,f,i).
شکل 11. دو مورد منفی کاذب در محل تست 1 و 2. حاشیه به دلیل وجود عنصری روی آن ( a,b ) شناسایی نمی شود. حاشیه کوتاه بین اتومبیل ها در روش عملیات مورفولوژیکی حذف می شود ( c,d ).

شکل 12. ابر نقطه ای اندازه گیری شده توسط یک حسگر RIEGL که به عنوان سایت تست 2 ( a ) استفاده می شود. تصویر ارتو از ناحیه مورد مطالعه با حاشیههای تقسیمبندی شده ( b ) همپوشانی دارد.

شکل 13. جزئیات محل آزمایش 2. برای هر جزئیات، یک نمای پلانی از شدت داده های Lidar ( a )، ابر نقطه اصلی ( b )، و نتیجه روش پیشنهادی با حاشیه ها به رنگ زرد و پس زمینه نشان داده شده است. به رنگ آبی ( ج ).

شکل 14. دو مورد مثبت کاذب در محل آزمایش 2. در هر دو مورد، برخی از عناصر با هندسه مشابه به حاشیه، مانند پله های پله ( a و b ) یا نیمکت ها ( c و d )، به اشتباه تعیین شده اند.

جدول 1. تنظیمات الگوریتم مورد استفاده در Test Site 1.
جدول 2. دقت روش تشخیص در محل آزمایش 1.
جدول 3. تنظیمات الگوریتم مورد استفاده در Test Site 2.
جدول 4. دقت روش تشخیص در سایت تست 2.
جدول 5. محدوده مقادیر برای هر پارامتر در نظر گرفته شده و تجزیه و تحلیل کمی برای پیکربندی پارامترهای مختلف.
جدول 6. دقت روش برای مقادیر پارامتر خارج از محدوده بهینه.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر