1. معرفی
در سالهای اخیر، اکثر کشورهای در حال توسعه شاهد گسترش مناطق شهری بودهاند. وقوع مکرر رویدادهای مخاطره شهری (UHEs) مانند بلایای طبیعی، حوادث حملونقل، و حوادث تأسیسات اغلب منجر به تلفات و خسارات اقتصادی هنگفت میشود و ممکن است بدون درمان به موقع و تصمیمگیری مناسب به حوادث بزرگتری تبدیل شود [1 ، 2 ] . علاوه بر این، امکانات، محیط، تراکم جمعیت و سایر پارامترهای مدل نامشخص در ارزیابی ریسک، کارایی تصمیمگیری اضطراری را محدود میکند. ارزیابی ریسک فوری چالش برانگیز است اما برای اقدامات واکنش اضطراری قبل و بعد از UHE ضروری است.
ارزیابی ریسک بخشی از مدیریت ریسک است که فرآیندی را برای تعیین روشی که هدف ممکن است تحت تأثیر قرار گیرد ارائه میکند و پیش از تعیین اینکه آیا به درمان بیشتری نیاز است یا خیر، پیامدها و احتمالات آنها را تجزیه و تحلیل میکند. استاندارد بین المللی ایزو 31000 مدیریت ریسک ارزیابی ریسک را فرآیندی تعریف می کند که شامل سه مرحله است: شناسایی ریسک، تجزیه و تحلیل ریسک و ارزیابی ریسک [ 3 ، 4 ، 5] .]. ارزیابی ریسک برای رویدادهای مخاطره شهری را می توان به دو دسته اساسی تقسیم کرد: ارزیابی ریسک کیفی و کمی. هر روش ارزیابی ریسک دارای مزایا، محدودیت ها و مشکلات منحصر به فردی است. ارزیابی کیفی ریسک معمولاً نظرات کارشناسان را برای تعیین و ارزیابی احتمال و پیامدهای خطر در نظر می گیرد. این روش عمدتاً بر دانش متخصصان متکی است. بنابراین، نتایج ارزیابی کیفی ریسک ذهنی است. ارزیابی کمی ریسک عمدتاً به دادههای کافی موجود و مدلهای ارزیابی کمی بستگی دارد. بنابراین، نتایج ارزیابی کمی ریسک عینی است و یک روش استاندارد شده اغلب میتواند مکرراً برای درک دقیقتر ریسکها مورد استفاده قرار گیرد. ارزیابی کمی ریسک اغلب به دو دسته تقسیم می شود: ارزیابی ریسک احتمالی قبل از UHE و ارزیابی ریسک فوری در طول UHE، که هر دو شامل خطر سلامتی انسان و ریسک اقتصادی میشوند. روش اول در مطالعات قبلی مورد توجه تحقیقات قرار گرفته و اساس چارچوب های بالغ متعددی را تشکیل داده است. برای مثال، متدولوژی ارزیابی ریسک تصادفی برای صنایع (ARAMIS) توسط اتحادیه اروپا در سال 2005 ایجاد شد.6 ]. یک فرآیند ارزیابی کمی ریسک (RAP) برای حوادث تاسیسات صنعتی ناشی از رویدادهای لرزه ای توسعه یافته است [ 7 ]. با این حال، این روشها نمیتوانند پشتیبانی تصمیمگیری را برای پاسخ اضطراری فراهم کنند، زیرا در واقعیت، پاسخ اضطراری دارای محدودیتهای خاصی است و نیاز به ارزیابی ریسک فوری در ابزار ارزیابی، کارایی، بیان نتایج و سایر پارامترها دارد. برای ارزیابی ریسک فوری، تمرکز تحقیقات آینده بر توسعه روشی فوری برای نظارت و کنترل ریسک است. یک چارچوب ارزیابی خطر فوری مبتنی بر سیستم اطلاعات جغرافیایی (GIS) برای نشت مواد شیمیایی برای کاربرد در رودخانه Songhua در چین طراحی شده است [ 8]] بر اساس نظارت UHE. یک ابزار ارزیابی خطر فوری برای تصمیمگیری در زمینه سرکوب آتشسوزی بر اساس چندین مؤلفه اصلی سیستم پشتیبانی تصمیمگیری آتشسوزی وحشی (WFDS) [ 9 ] طراحی شده است. با این حال، این روشهای ارزیابی ریسک فقط از مشاهدات فضا-زمانی یک UHE بر اساس یک سنسور تک نوع استفاده میکنند و شامل گردش کار فوری برای ارزیابی ریسک بر اساس مشاهدات نمیشوند. بنابراین، مدیریت یکپارچه سازی و به اشتراک گذاری برای حسگرهای ناهمگن چند منبعی به یک چالش مهم برای تحقیقات ارزیابی ریسک فوری تبدیل شده است.
شهرهای هوشمند [ 10 ، 11 ، 12 ، 13 ، 14 ]، یک روش پایدار و هوشمند برای یکپارچه سازی تمام زیرساخت ها و خدمات به عنوان یک کل، در سراسر جهان مورد بحث قرار گرفته است. شهرهای هوشمند از دستگاه های هوشمند برای نظارت و کنترل برای اطمینان از پایداری و کارایی استفاده می کنند. ویژگی اصلی یک شهر هوشمند دستیابی به سنجش جامع، عمق بیشتر، اتصالات حسگر گسترده تر و پردازش دقیق تر است. شبکه های حسگر توسط سازمان ملی هوانوردی و فضایی (ناسا) پیشنهاد شده است [ 15]]. شبکه های حسگر که جزء فنی شهرهای هوشمند هستند، به طور گسترده برای هشدارهای بلایا و نظارت پویا بر محیط زیست محیطی، زمین و اقیانوس استفاده می شود. یک محیط وب حسگر (SWE) [ 16 ] میزبان شبکههای حسگر است، از جمله یک سری استاندارد از کنسرسیوم فضایی باز (OGC)، که مجموعهای از رابطهای قابلیت همکاری و ابردادههای کدگذاری را برای ادغام بیدرنگ شبکههای حسگر ناهمگن در اطلاعات فراهم میکند. زیرساخت ها استانداردهای خدمات وب OGC شامل سرویس مشاهده حسگر (SOS)، سرویس پردازش وب (WPS)، سرویس ویژگی وب (WFS)، سرویس پوشش وب (WCS)، خدمات کاتالوگ برای وب (CSW) و مدل های اطلاعاتی است. از جمله زبان مدل سنسور (SensorML) [ 17 ، 18] و مشاهده و اندازه گیری (O & M). SensorML نوعی استاندارد رمزگذاری اطلاعات از OGC SWE است که کدگذاری و مدل هایی را برای توصیف فرآیندهای مربوط به حسگرها یا یک سیستم پردازش ارائه می دهد. هر نوع فرآیندی قابل اجرا و کشف است. این فرآیندها با ورودی، خروجی، پارامترها و روش هایی برای ارائه ابرداده مرتبط تعریف می شوند. زنجیره فرآیند یک فرآیند ترکیبی از SensorML است که برای اتصال فرآیندهای فرعی استفاده می شود. می توان از آن به عنوان مکانیزمی برای توصیف گردش کار از منظر جریان داده استفاده کرد. بنابراین، حسگرها، دادهها و مدلهای توزیع شده از طریق SensorML قابل دسترسی هستند. با این حال،
مدلسازی محیطی یکپارچه (IEM) یکی از رویکردهای سیستماتیک رایج برای تجمیع اطلاعات و خدمات است. IEM مدل ها و داده ها را برای کشف و تفسیر روابط و تعاملات پیچیده بین اجزای سیستم اجتماعی، اقتصادی و محیطی شامل چهار عنصر وابسته به هم ادغام می کند: برنامه ها، علم، فناوری و جامعه [19، 20 ، 21 ، 22 ] .]. IEM مسئله یکپارچه سازی منابع، استفاده مجدد از مدل محاسباتی و تصمیم گیری توسط اتصالات مدل را در نظر می گیرد. مدل ها در IEM در عملکرد مستقل باقی می مانند اما با یکدیگر همکاری می کنند. در طول چند دهه گذشته، تلاش های قابل توجهی به توسعه فن آوری سیستم های IEM اختصاص یافته است. با پیشرفت زیرساخت داده های مکانی (SDI) و زیرساخت های سایبری، روش مدل به عنوان یک سرویس (MaaS) برای ارائه یک وب مدل به سمت سیستم های مدل سازی یکپارچه استفاده می شود. وب مدل یک شبکه پویا است که تعداد زیادی مدل را جمع آوری می کند که از طریق وب سرویس ها در تعامل هستند [ 23 , 24 , 25]. در این روش میتوان مدلهای مختلفی را بهعنوان یک سرویس پیادهسازی کرد که میتواند با رابط دسترسی به وب سرویس و گردشهای کاری سرویسگرا همراه شود. در حال حاضر، سیستمهای نظارت UHE عمدتاً مبتنی بر یک شبکه حسگر واحد هستند و حسگرها فقط کشف UHE و پیشبینیهای اولیه فضا-زمان را ارائه میکنند. همکاری با حسگرها در زمینه های مختلف برای بهبود کارایی ارزیابی ریسک و تصمیم گیری دشوار است [ 26 ، 27 ، 28 ]. برای یک ماموریت ارزیابی ریسک ناگهانی، کاربر نمی تواند منابع خدمات اطلاعاتی کافی را برای برآوردن نیازهای حسگرها، مدل های محاسباتی و خدمات کاربردی به دست آورد. بنابراین، یک پلت فرم مدیریت یکپارچه با منابع و معماری مدیریت گردش کار مورد نیاز است.
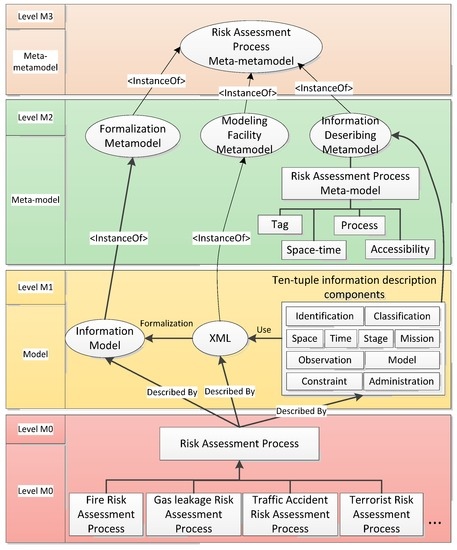
تسهیلات متا شی (MOF) [ 29]، یک استاندارد گروه مدیریت شی (OMG) به عنوان یک موتور مبتنی بر مدل، یک چارچوب یکپارچه برای تعیین تعریف، عملکرد و یکپارچه سازی ابرداده ها و داده ها است. زبان متا مدل سازی آن برای نوشتن متا مدل ها و مدل ها مفید است. یک متا مدل مطابق با مشخصات MOF دارای ویژگی های باز بودن، توسعه پذیری و قابلیت همکاری است. MOF به عنوان یک ساختار مدل سازی چهار لایه معمولی طراحی شده است که یک متا-مدل در لایه بالایی ارائه می دهد که به عنوان M3 یا لایه متا-مدل شناخته می شود. هدف اصلی این لایه، تعریف یک طرح توصیف انتزاعی برای توصیف متا مدل ها است. لایه M2، همچنین به عنوان لایه متا مدل شناخته می شود، برای توصیف عناصر لایه M1 استفاده می شود. لایه M1 شامل انواع مختلفی از مدل ها با ساختار لایه متا مدل است. لایه M0 از اشیاء دنیای واقعی مانند داده های خاص یا نمونه های جریان داده تشکیل شده است که توسط مدل هایی در لایه M1 ساخته شده اند. بنابراین، گردشهای کاری متعدد برای RAPها از یک توصیف و اشتراک یکپارچه بر اساس یک MOF با معماری چهار لایه بهره میبرند.
همانطور که گفته شد، این مقاله سه هدف اصلی دارد. اول، برای دستیابی به نظارت دینامیکی UHEs، ما به مدیریت یکپارچه حسگرهای ناهمگن چند منبع تحت یک SWE دست یابیم. هدف دوم اجرای فوری یک گردش کار ارزیابی ریسک در طول UHE است. ما روشی را برای ایجاد یک گردش کار اجرایی در قالب یک زنجیره فرآیند بر اساس SensorML طراحی کردهایم. هدف سوم طراحی یک چارچوب متا مدل قابل توسعه برای دستیابی به نمایش یکپارچه زنجیرههای RAP برای چندین UHE و مدیریت مشترک و اشتراک زنجیرههای RAP است.
این مقاله بر مدلسازی RAP مکانی-زمانی برای UHEs در یک SWE متمرکز است و به شرح زیر سازماندهی شده است. بخش 2 عمدتاً روش مدلسازی RAP را معرفی میکند که برای ساخت یک مدل RAP مشترک و قابل تعامل بر اساس یک MOF با ساختار توصیف اطلاعات 10 تایی پیشنهاد شده است. یک مورد نشت گاز و RAP مربوط به آن در بخش 3 ارائه شده است . در بخش 4 ، یک آزمایش انجام شده با استفاده از یک فرامدل فرآیند و نتایج ارزیابی ریسک مورد بحث قرار گرفته است. بخش 5 کاربرد و مزایای فرامدل فرآیند را تحلیل می کند و نتیجه گیری و چشم انداز در بخش 6 خلاصه می شود .
2. روش
ساخت یک RAP شامل چهار مرحله است که در این قسمت به تفصیل توضیح داده شده است. اول، یک متا مدل RAP بر اساس ساختار MOF چهار لایه ایجاد می شود. سپس مولفه های ابرداده اساسی و ساختار توصیف اطلاعات 10 تایی در متا مدل RAP سازماندهی و توضیح داده شده است. بر اساس مولفه های ابرداده اساسی و اطلاعات 10 تایی، ما RAP را بیان می کنیم و گردش کار را در چهار مرحله می سازیم: سنجش، تشخیص، تجزیه و تحلیل و ارزیابی. در نهایت، رسمی سازی متا مدل RAP برای دستیابی به مدیریت یکپارچه چندین RAP معرفی شده است.
2.1. متا مدل سازی برای RAP
برای توصیف یک RAP برای UHE ها به عنوان یک مدل اطلاعات قابل اشتراک گذاری در یک معماری خاص، ما یک مدل متا RAP را بر اساس چارچوب MOF پیشنهاد می کنیم.
MOF یک استاندارد OMG برای متا مدلسازی با ساختار چهار لایه است که مفاهیم مدلسازی و روابط بین آنها را تعریف میکند. معماری مدلسازی RAP از چهار لایه معمولی بر اساس متا لایه های MOF تشکیل شده است که در شکل 1 نشان داده شده است.. هر لایه به عنوان نمونه ای از لایه بالای آن و انتزاعی از لایه زیر آن نشان داده می شود. لایه بالایی، M3، معمولاً به عنوان یک لایه متا-مدل نامیده می شود که شامل مفاهیم متا مدل سازی RAP و روابط آنها است. لایه بعدی، M2، یک لایه متا مدل است که شامل اطلاعات توصیف متا مدل، متا مدل تسهیلات مدلسازی و رسمیسازی متا مدل است. لایه M1 یک لایه مدل توصیف اطلاعات است که شامل مدل توصیف اطلاعات، زبان مدلسازی XML و محتوا و ساختار متا مدل به تفصیل است. لایه پایین، M0، انواع UHE های مربوط به نمونه های RAP را در خود جای می دهد، از جمله RAP نشت گاز، RAP سیل، RAP تصادف ترافیکی و RAP آتش سوزی.
2.2. اجزای اطلاعات پایه یک RAP
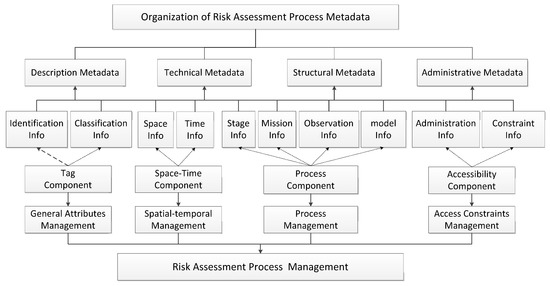
هسته معماری چهار لایه، متا مدل توصیف اطلاعات RAP است که اطلاعات مشخصه چند وجهی یک RAP را توصیف می کند. متا مدل توصیف اطلاعات RAP را می توان با توجه به عملکرد آنها به چهار جزء طبقه بندی کرد: برچسب، فضا-زمان، فرآیند و دسترسی. اطلاعات برچسب نقش مهمی در توصیف متا مدل های UHE های مختلف مرتبط با RAP ایفا می کند. زمانی که UHE رخ می دهد، اطلاعات مکانی-زمانی باید توسط RAP ارائه شود، زیرا به عنوان پایه و اساس نتایج ارزیابی ریسک فوری عمل می کند. اطلاعات فرآیند از اطلاعات مرحله، اطلاعات ماموریت، اطلاعات مشاهده و اطلاعات مدل تشکیل شده است. این مؤلفهها الزامات مأموریت ارزیابی ریسک، الزامات حسگر و الزامات مدل ارزیابی را در هر مرحله RAP توصیف میکنند. قابلیت دسترسی شامل اطلاعات سرویس و اطلاعات محدودیت است که اطلاعات فراداده خدمات و محدودیت های ارائه شده توسط RAP را تعیین می کند. قابلیت دسترسی همچنین می تواند اشیاء سرویس و انواع سرویس را از نتایج RAP توضیح دهد. چهار مؤلفه اطلاعاتی متا مدل RAP را می توان به صورت زیر تقسیم کرد.
-
برچسب: چنین اطلاعاتی از اطلاعات شناسایی و اطلاعات طبقه بندی تشکیل شده است. اطلاعات شناسایی برای توصیف نام RAP، شناسه و سایر عناصر شناسایی استفاده می شود. اطلاعات طبقه بندی UHE های مختلف را تحت معیارهای طبقه بندی مختلف توصیف می کند و برای تحقیق و کشف RAP بر اساس UHE مربوطه مفید است.
-
فضا-زمان: چنین اطلاعاتی اطلاعات زمانی و مکانی RAP را نشان می دهد. RAP بر اساس مشاهدات مکانی-زمانی است که محدوده مکانی-زمانی را برای ارزیابی ریسک با وقوع مشاهدات غیرعادی فراهم می کند.
-
فرآیند: فرآیند بیانگر توصیف انتزاعی یک گردش کار است که توالی اجرای مشاهدات و مدل ها را در چهار مرحله توصیف می کند: سنجش، تشخیص، تجزیه و تحلیل و ارزیابی.
-
دسترسی: اطلاعات دسترسی شامل اطلاعات مدیریت و اطلاعات محدودیت است. مدیریت منعکس کننده انجمن یا سازمانی است که مسئول UHE است. اطلاعات محدودیت شامل چندین محدودیت قانونی و امنیتی است که برای سازماندهی موثر اطلاعات منابع داده ای که RAP برای UHE ها نیاز دارد، برای کاربران حیاتی است.
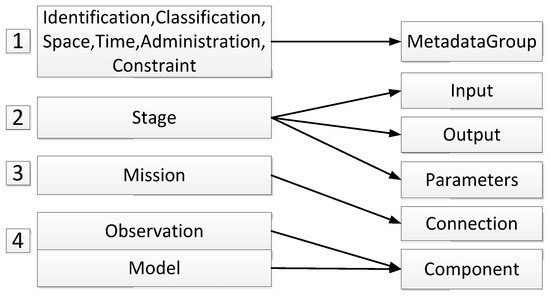
به طور خلاصه، چهار نوع اطلاعات ابرداده اساسی (برچسب، فضا-زمان، فرآیند و در دسترس بودن) یک مدل اطلاعاتی مشترک برای یک فرآیند قابل استفاده مجدد را تشکیل میدهند. به طور خاص، 10 جنبه اطلاعاتی دوگانه (10 جنبه از اطلاعات RAP) در مجموع وجود دارد که شرح ساختار مفصلی از جمله شناسایی، طبقهبندی، فضا، زمان، مرحله، مأموریت، مشاهده، خدمات (مدل)، مدیریت و محدودیت را ارائه میدهد. روابط بین اجزای فراداده RAP و توضیحات اطلاعات 10 تایی در شکل 2 نشان داده شده است .
اطلاعات 10 تایی، متشکل از 10 جنبه از اطلاعات RAP نشان داده شده در شکل 2 ، به طور خاص به شرح زیر توضیح داده شده است.
-
اطلاعات شناسایی شامل کلمات کلیدی، نام، نوع و ویژگی های یک RAP است که اطلاعات فرآیند رایج را برای شناسایی منحصر به فرد یک فرآیند توصیف می کند.
-
اطلاعات طبقه بندی نقشه برداری از انواع RAP ها به UHE ها را توصیف می کند. هنگامی که حسگرهای نظارتی مقادیر غیرعادی دریافت میکنند، میتوان به سرعت RAP را تعیین کرد که با UHE مطابقت دارد بر اساس نقشهبرداری، که کشف سریع UHEs و ارزیابی ریسک فوری را ممکن میسازد.
-
اطلاعات فضایی گستره مکانی و اطلاعات مرجع مکانی مورد استفاده برای توصیف مکان UHE ها را پوشش می دهد. وسعت فضایی یک RAP دو بعدی (2 بعدی) است زیرا ارزیابی ریسک UHE در درجه اول بر تجزیه و تحلیل فضایی دو بعدی متمرکز است.
-
اطلاعات زمان می تواند پیشرفت UHE را توصیف کند و مبنایی را برای RAP فوری فراهم می کند.
-
اطلاعات مرحله، مأموریت ها، مدل ها و مشاهدات مختلف مورد نیاز را در هر مرحله توصیف می کند. اطلاعات مرحله همچنین می تواند اطلاعات ورودی، خروجی و پارامترهای هر مرحله را توصیف کند. علاوه بر این، مشکلات عدم قطعیت زمانی رخ می دهد که ممکن است ناشی از تاخیر داده های حسگر یا مشکلات شبکه در طول زمان اجرای RAP باشد. اطلاعات مرحله طراحی شده می تواند وضعیت اجرا، مرحله و زمان دریافتی داده های حسگر را توصیف کند. اطلاعات مرحله، محدوده آستانه زمانی را خلاصه می کند. زمانی که زمان اجرا از محدوده آستانه فراتر رفت، خطا برگردانده می شود.
-
اطلاعات ماموریت نشان دهنده ماموریت های ارزیابی خاص برای هر مرحله ارزیابی است. توالی اتصال برای منابع خدمات، از جمله مشاهدات حسگر و خدمات مدل در یک RAP را توصیف می کند.
-
اطلاعات مشاهده نشان دهنده اتصال مشاهدات حسگر بر اساس اطلاعات ماموریت است. انواع مختلفی از سنسورها اغلب در مراحل مختلف ارزیابی مورد نیاز است. این اطلاعات حاوی اطلاعات اولیه در مورد مشاهدات حسگر اتصال است.
-
اطلاعات مدل (سرویس) مدل های توزیع شده را با توجه به الزامات اطلاعات ماموریت برای هر مرحله ارزیابی نشان می دهد. نام سرویس، آدرس سرویس و نوع سرویس به اطلاعات ماموریت ارائه شده است.
-
اطلاعات مدیریت نشان دهنده مخاطبین، تاریخچه، اسناد و سایر داده هایی است که نقش مهمی در مدیریت و بهبود RAP ها دارند.
-
اطلاعات محدودیت، مجوزهای دسترسی، قوانین امنیتی و محدودیت های قانونی یک RAP را توصیف می کند.
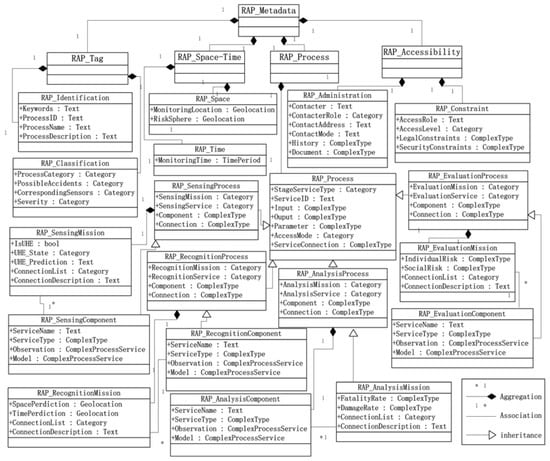
یک نمودار زبان مدلسازی یکپارچه (UML) از یک RAP برای نشت گاز در شکل 3 نشان داده شده است .
2.3. ساخت یک RAP بر اساس مراحل
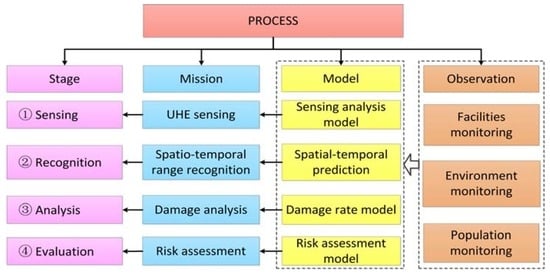
بر اساس مؤلفههای ابرداده اساسی و ساختار توصیف اطلاعات 10 تایی، ما یک RAP با چهار مرحله ارزیابی ریسک ایجاد کردیم: سنجش، تشخیص، تجزیه و تحلیل و ارزیابی. مراحل مختلف ارزیابی ریسک الزامات ماموریت متفاوتی را برای مشاهدات و مدلهای مختلف در RAP دارد. فرآیند ارزیابی پیشنهادی شامل این چهار مرحله است. مرحله، ماموریت، مشاهده و الزامات مدل برای تمام مراحل ارزیابی ریسک در شکل 4 نشان داده شده است. در مرحله سنجش، ماموریت اصلی نظارت معمول است. بنابراین، فوری ترین عوامل فاجعه بار باید در زمان واقعی ثبت شوند. اگر مقدار مانیتورینگ به طور مداوم غیر طبیعی باشد، باید با توجه به مقدار غیر طبیعی آنالیز شود. هنگامی که UHE شناسایی شد، شدت آن بلافاصله محاسبه و تجزیه و تحلیل می شود. در مرحله شناسایی، ماموریت اصلی شناسایی رویدادهای ثانویه احتمالی و پیشبینی محدوده تأثیر مکانی-زمانی با استفاده از یک مدل پیشبینی مرتبط است. مقیاس های مکانی و زمانی UHE را می توان با توجه به اطلاعات مکانی-زمانی سنسورهایی که مقادیر غیرعادی را ثبت می کنند تعیین کرد که برای ارزیابی خطر بعدی و برای تعیین منطقه هشدار مفید است. در مرحله تجزیه و تحلیل، ماموریت اصلی محاسبه و تجزیه و تحلیل آسیب ایجاد شده توسط UHE است. رویدادهای مختلف ثانویه ممکن است اغلب با نرخ های خسارت متفاوتی مطابقت دارند که برای محاسبات ریسک فردی و ریسک اجتماعی در مرحله بعدی مفید هستند. در مرحله ارزیابی، ماموریت اصلی ارزیابی ریسک فردی و ریسک اجتماعی است. ادغام میزان خسارت و تراکم دادههای مشاهده جمعیت، نتایج ریسک فردی و ریسک اجتماعی را بر اساس مدلهای ارزیابی همبستگی ارائه میکند.
بر اساس توضیحات فوق در مورد مراحل و مأموریت های مربوطه، می توان منابع اطلاعاتی را یکپارچه کرد و خدمات را از RAP صحیح استخراج کرد تا بلافاصله RAP را اجرا کند. این مبنای تصمیم گیری و پشتیبانی تصمیم برای مدیریت اضطراری UHE را فراهم می کند.
2.4. رسمی کردن یک متا مدل RAP
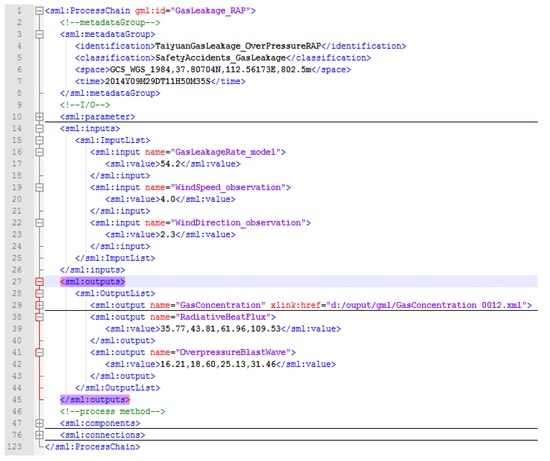
یک متا مدل RAP با استفاده از استاندارد SensorML، که یک مدل و کدگذاری XML را برای پیادهسازی ارزیابی دادههای کشف و مشاهده شبکه حسگر تعریف میکند، رسمیت مییابد. علاوه بر این، به توسعه دهندگان اجازه می دهد تا مدل ها و قالب های XML را برای توصیف مشاهدات و حسگرهای پس از پردازش تعریف کنند. ویژگیهای اصلی یک زنجیره فرآیند شامل گروه ابردادهها، ورودیها، خروجیها، پارامترها، اتصالات و مؤلفهها است. ما می توانیم یک متا مدل RAP را بر اساس این ویژگی ها رسمی کنیم. اولین ویژگی، اطلاعات اولیه ابرداده است، از جمله شناسایی، طبقه بندی، مکان، زمان، مدیریت و اطلاعات محدودیت، که مستقیماً به گروه metadata در SensorML نگاشت می شود. گروه دوم از ویژگی ها، اطلاعات مرحله است که شامل سنجش، تشخیص، تجزیه و تحلیل و ارزیابی می شود. که به عناصر نوردهی اصلی یک زنجیره فرآیند، از جمله ورودی، خروجی و پارامترها نگاشت می شود. گروه بعدی اطلاعات ماموریتی است که برای توصیف توالی پیوند از چندین فرآیند فرعی به فرآیند ترکیبی و نگاشت به اتصالات در SensorML استفاده می شود. مشاهدات و سرویس مدل به آخرین ویژگی مربوط به مؤلفه در SensorML نگاشت. نقشه برداری از متا مدل RAP به زنجیره فرآیند SensorML در نشان داده شده استشکل 5 . عناصر اصلی یک زنجیره فرآیند به گره های داده و گره های پردازش تقسیم می شوند. ارتباط بین گره های مختلف نیز تعریف شده است. بنابراین، ساختار منطقی زنجیره فرآیند توضیح داده شده است.
3. مطالعات موردی بر اساس نشت گاز
در کشورهای در حال توسعه، رشد بی سابقه شهرنشینی، به ویژه در شهرهای بزرگ، منجر به افزایش تقاضا برای گاز طبیعی و ایجاد شبکه متراکم خط لوله گاز شهری شده است. این افزایش تقاضا منجر به افزایش متناظر در خطرات و خطرات ایمنی بالقوه می شود [ 30 , 31 , 32]. گاز طبیعی قابل اشتعال است و خطر آتش سوزی و انفجار را به همراه دارد. تا زمانی که درمان اضطراری به موقع ارائه نشود، عواقب حوادث ناشی از نشت گاز می تواند شدید باشد. توزیع تراکم جمعیت و ساختمان های شهری ممکن است تخلیه را پیچیده کند و در نتیجه منجر به خسارات جانی و مالی زیادی شود. بنابراین، برای جلوگیری از حوادث و به حداقل رساندن چنین تلفاتی، یک مورد نشت گاز را به عنوان مطالعه موردی برای تأیید امکانسنجی و سازگاری رویکرد RAP پیشنهادی در نظر میگیریم.
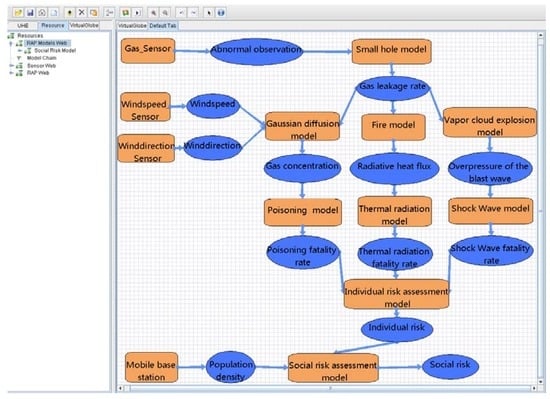
برای ارزیابی ریسک به موقع و تخمین کمی خطرات فردی و اجتماعی، ما یک RAP برای یک رویداد نشت گاز شهری شامل چهار مرحله پیشنهادی ایجاد کردیم. اهداف هر مرحله شامل محاسبه نرخ نشت، تشخیص اثرات فیزیکی، تجزیه و تحلیل میزان مرگ و میر و تلفات و محاسبات ریسک فردی و اجتماعی است. ماموریت ها به داده های سنجش زمان واقعی و مدل های ارزیابی از مشاهدات انتزاعی و اجزای مدل بستگی دارد. روابط بین ماموریت ها، مشاهدات و مدل های خاص در شکل 6 نشان داده شده است. وظیفه ارزیابی ریسک در هر مرحله به طور خاص در اطلاعات ماموریت و مدل های ارزیابی ریسک مربوطه در اطلاعات مدل توضیح داده شده است. نمونهای از مرحله شناسایی در مأموریت اصلی، شناسایی محدوده نفوذ مکانی-زمانی بر اساس بلایای مشتق احتمالی مانند انتشار گاز، آتشسوزی و انفجار ابرهای گازی است. پارامترهای مدلهای مرتبط، از جمله مدل انتشار گاوسی، مدل آتشسوزی، و مدل انفجار بیش از حد فشار، در اطلاعات مدل توضیح داده شدهاند. هنگامی که RAP اجرا می شود، نرخ نشت گاز به عنوان ورودی در مرحله سنجش منتقل می شود و محدوده تاثیر مکانی-زمانی توسط این سه مدل محاسبه می شود. محدوده به عنوان خروجی به مرحله بعدی منتقل می شود.
3.1. سنجش خطر برای نشت گاز
RAP یک فرآیند ارزیابی مبتنی بر نظارت زمان واقعی است که وقوع UHE ها را گزارش می کند. برای یک رویداد نشت گاز، سنسورهای فشار مستقر در خطوط لوله گاز فشار روزانه را حس می کنند و مقادیر غیرعادی را در زمان واقعی فیلتر می کنند. یک رویداد نشت گاز زمانی اعلام می شود که مقادیر غیرعادی از پایش مداوم دریافت شود. علاوه بر این، محل اولین نقطه نشتی باید در نظر اولیه باشد. معادله موج فشار منفی که در شکل 7 نشان داده شده استبرای حل این مشکل ارائه شده است. اگر نشت گاز در نقطه خاصی از خط لوله رخ دهد، فشار در آن نقطه کاهش می یابد. در همان زمان، یک موج فشار منفی تشکیل شده و به دو انتهای خط لوله منتقل می شود. بنابراین، ما می توانیم به سرعت مکان نقطه نشتی یک خط لوله گاز را با توجه به سرعت و زمانی که موج فشار منفی از نقطه نشتی به هر دو انتهای خط لوله منتقل می شود، تعیین کنیم.
معادله موج فشار منفی در رابطه (1) نشان داده شده است:
جایی که ایکسایکسفاصله نقطه نشتی تا نقطه ورودی بر حسب متر است. L�طول خط لوله بر حسب متر است. آآسرعت انتشار موج فشار در محیط خط لوله بر حسب متر بر ثانیه است. و Δ TΔتیاختلاف زمانی دریافت امواج فشار در سنسورهای ورودی و خروجی در ثانیه است.
مقادیر غیرعادی را می توان برای پیش بینی مکانی-زمانی استفاده کرد که برای تعیین محل نشتی و محاسبه نرخ نشتی که به مرحله بعد وارد می شود مفید است. در این مطالعه، مدل سوراخ کوچک [ 33 ] برای ارزیابی میزان نشت گاز انتخاب شد که در زیر توضیح داده شده است.
-
مدل سوراخ کوچک: حالت های نشت گاز اغلب به دو نوع تقسیم می شوند: سرعت صوتی و سرعت زیر صوت. برای ساده کردن محاسبه، یک مدل یکنواخت برای محاسبه نرخ نشتی ناشی از خرابی سوراخ کوچک یا متوسط اتخاذ شده است. مدل در معادله (2) نشان داده شده است:
جایی که سسنرخ نشت گاز بر حسب کیلوگرم بر ثانیه است. آo rآ��مساحت دهانه نشتی در متر مربع است . مموزن مولکولی گاز بر حسب کیلوگرم بر مول است. آرآرثابت گاز (8.314 J/mol·K) است. تی2تی2دمای گاز داخل خط لوله بر حسب درجه K است. ککشاخص آدیاباتیک یا نسبت ظرفیت گرمایی ایزوباریک به ظرفیت گرمایی ایزوکوریک (1.28 برای گاز طبیعی) است. پآپآفشار محیطی خارج از خط لوله گاز در Pa است. و پ2پ2فشار داخل خط لوله گاز بر حسب Pa است.
3.2. تشخیص خطر برای نشت گاز
پس از سنجش به موقع ریسک، شناسایی فوری رویدادهای ثانویه بالقوه و حوزه نفوذ مکانی-زمانی آنها مهم است. یک رویداد نشت گاز ممکن است باعث انتشار گاز، آتش سوزی، انفجار ابر بخار و سایر رویدادهای ثانویه شود. در این مقاله، سه نوع اصلی از رویدادهای ثانویه ناشی از نشت گاز را مورد بحث قرار می دهیم. جزء مدل در مرحله شامل یک مدل انتشار گاوسی، یک مدل آتش و یک مدل انفجار است. علاوه بر این، دادههای رصد هواشناسی بلادرنگ برای ورودی به مدل انتشار گاوسی [ 34 ] برای شناسایی جهت و شدت انتشار ارائه میشود. انواع مدل در زیر توضیح داده شده است.
-
مدل انتشار گاوسی: مدل انتشار گاوسی به دو نوع پلوم و پف تقسیم می شود. مدل انتشار ستونی برای انتشار نشت پیوسته جزئی مناسب است و مدل پاف برای انتشار نشت گاز آنی استفاده می شود. مورد اول برای یک رویداد نشت گاز مناسب تر است. توزیع غلظت مدل انتشار گاوسی در رابطه (3) نشان داده شده است:
جایی که ج ( x ، y، z، اچ)ج(ایکس،�،�،اچ)غلظت نزدیک منبع نشت گاز بر حسب کیلوگرم بر متر مکعب است . سسنرخ جریان جرمی نشت گاز بر حسب کیلوگرم بر ثانیه است که با خروجی مدل سوراخ کوچک در مرحله سنجش تعیین می شود. اچاچارتفاع منبع نشتی بر حسب متر است. ( x ، y، z)(ایکس،�،�)مختصات هر نقطه در ناحیه بادگیر است. تو¯تو¯میانگین سرعت باد بر حسب متر بر ثانیه است که توسط نتیجه مشاهدات سنسورهای سرعت باد تعیین می شود. و σایکس�ایکس، σy��، و σz��به ترتیب انتشار بادهای رو به پایین، باد متقاطع و باد عمودی بر حسب متر است که بر اساس نتایج مشاهدات حسگرهای جهت باد و سطح پایداری جو محاسبه میشوند.
-
مدل آتش سوزی: آتش می تواند محیط اطراف را از طریق تشعشعات حرارتی تحت تاثیر قرار دهد. اجسام اطراف می توانند در یک محیط تشعشعی با شدت بالا سوخته و تغییر شکل دهند. تشعشعات با دمای بالا ممکن است باعث سوختن تجهیزات و حتی تلفات جانی شود. مدلهای آتش موجود بر اساس انواع آتش تقسیم میشوند و شامل مدل گلوله آتش، مدل آتش جت و مدل آتش فلاش میشوند. استفاده از آنها به نگرانی های بالقوه بر اساس مطالب و زمینه منتشر شده بستگی دارد. در این مقاله، مدل گلوله آتشین که در معادله (4) توضیح داده شده است، به عنوان مثال استفاده شده است:
جایی که q�شار گرمای تابشی در موقعیت خاص بر حسب W/m2 است . ستی و یک _ _ستی�تیآلجرم گاز نشتی بر حسب کیلوگرم است که با زمان نشتی و خروجی مدل سوراخ کوچک در مرحله سنجش تعیین می شود. تیجتیجهدایت حرارتی است. و ایکسایکسفاصله بین مرکز منطقه شعله و نقطه هدف است.
-
مدل انفجار ابر بخار [ 35 ]: یک ابر بخار زمانی تشکیل می شود که تعداد زیادی نشت گاز به سرعت در هوا پخش شود. اگر ابر بخار با چگالی حد انفجار مشتعل شود، انفجاری همراه با موج ضربه ای ایجاد می شود. مدل انفجار ابر بخار در معادله (5) نشان داده شده است:
جایی که Δ PΔپفشار بیش از حد حادثه موج انفجار است. آرآرفاصله یک نقطه مشخص در میدان انفجار تا منبع انفجار است. و مترتینتیمترتینتیبا رابطه (6) محاسبه می شود:
جایی که مترتینتیمترتینتیمعادل trinitrotoluene (TNT) در کیلوگرم در مرکز انفجار است. متردمتردجرم گاز شرکت کننده در انفجار بر حسب کیلوگرم است که با زمان نشتی و خروجی مدل سوراخ کوچک در مرحله سنجش تعیین می شود. ΔاچدΔاچدگرمای انفجار گاز بر حسب J/kg است. و ستینتیستینتیارزش حرارتی منبع انفجار استاندارد TNT (4.2 MJ/kg) است.
3.3. تجزیه و تحلیل ریسک برای نشت گاز
رویدادهای ثانویه ناشی از یک رویداد نشت گاز را می توان از خروجی های مرحله قبل شناسایی کرد. نتایج محاسباتی مدلها برای تجزیه و تحلیل نرخ مرگ و میر مفید است که ماموریت اصلی در مرحله تحلیل ریسک است. اثرات نشت گاز بر روی انسان، که شامل مسمومیت کشنده، شار تشعشع حرارتی و امواج ضربه ای است، می تواند با میزان مرگ و میر در یک بازه زمانی مشخص نشان داده شود. میزان مرگ و میر عبارت است از درصد مجروحانی که در معرض نشت گاز قرار گرفته اند که به ضریب خسارت مربوط می شود. مدل نرخ مرگ و میر در رابطه (7) نشان داده شده است:
جایی که پتیپتیدرصد افراد آسیب دیده یا اشیاء مستعد در محیط است، منfمن�عامل زیان آور است و آآو ببثابت هایی هستند که مقادیر مختلف را بر اساس سه نوع رویداد ثانویه ترسیم می کنند: انتشار گاز، آتش سوزی و انفجار ابر بخار.
3.4. ارزیابی ریسک برای نشت گاز
این مرحله به صورت کمی ریسک شهری شامل تلفات جانی و خسارات اموال را برای رویداد نشت گاز بر اساس خروجی های مرحله قبل محاسبه می کند. در این مقاله، ماموریت اصلی ارزیابی، ارزیابی ریسک تلفات است که به صورت کمی بر اساس ریسک های فردی و اجتماعی که در زیر تعریف می شود، اندازه گیری می شود. دادههای بیدرنگ ایستگاه پایه تلفن همراه برای محاسبه تراکم جمعیت اطراف مکان رویداد ارائه میشود که برای محاسبه ریسک اجتماعی مفید است. نتایج ارزیابی ریسک برای تعیین شرایط خطر برای خطوط لوله نشت گاز استفاده می شود.
-
مدل ریسک فردی [ 36 ]: مدل ریسک فردی به عنوان فراوانی صدمات و به ویژه مرگ افراد ناشی از یک خطر خاص به استثنای اقدامات حفاظتی تعریف میشود. برای یک رویداد نشت گاز، ریسک فردی را می توان به عنوان ادغام احتمال شکست خط لوله گاز و میزان مرگ و میر افراد در مکان خاص حادثه نشان داد. ریسک فردی با معادله (8) ارائه می شود:
جایی که منمننوع خطای فرضی است. φمن�مننرخ شکست خط لوله در واحد طول است. L�طول خط لوله بر حسب متر است. پمنپمنمیزان مرگ و میر ناشی از تصادف است که توسط خروجی در مرحله تجزیه و تحلیل تعیین می شود. و منمنحالت شکست خط لوله است.
-
مدل ریسک اجتماعی [ 37 ]: مدل ریسک اجتماعی برای توصیف رابطه بین احتمال وقوع حادثه و تعداد تلفات ناشی از حادثه استفاده می شود. ریسک اجتماعی به خطر تصادفات فاجعه آمیز اشاره دارد که به طور همزمان افراد زیادی را تحت تأثیر قرار می دهد. خطر اجتماعی نه تنها به ریسک فردی بلکه به تراکم جمعیت در نزدیکی منطقه نشت مرتبط است. ریسک اجتماعی را می توان با معادله (9) محاسبه کرد:
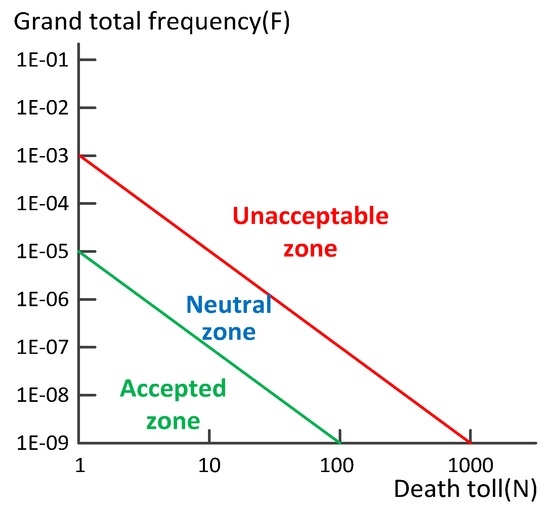
جایی که آمنآمنناحیه آسیب دیده حادثه شکست فرضی است. ρپ�پتراکم جمعیت در منطقه است که با محاسبه داده های ایستگاه پایه سیار تعیین می شود. و پمنپمنمیزان مرگ و میر یک نوع تصادف خاص است، منمن، که با سه رویداد ثانویه متفاوت است. منحنی فرکانس و عدد (F-N) برای بیان رسمی ریسک اجتماعی استفاده می شود.
4. پیاده سازی سیستم
4.1. معماری سیستم و اجزاء
یک سیستم نمونه اولیه شناخته شده مدیریت فرآیند ارزیابی ریسک (RAPM) برای ارائه یک ابزار مشترک برای مدلسازی، مدیریت، اجرا، و تجسم متا مدل RAP بر اساس روش مدلسازی RAP پیشنهادی طراحی شد. همانطور که در شکل 8 نشان داده شده است، معماری سیستم RAPM به چهار سطح منبع، میان افزار، کسب و کار و ارائه تقسیم می شود. لایه منبع شامل حسگرهای ناهمگن، دادههای مرتبط از جمله دادههای اطلاعات جغرافیایی و دادههای ویژگی، مدلهای ارزیابی و گردش کار است. تمام سرویس های منبع در فایل مدل با فرمت XML ذخیره می شوند تا خدمات را به لایه بالایی ارائه دهند. این خدمات در CSW ثبت شده و توسط مرکز ثبت مدیریت می شوند. لایه میان افزار شامل سریال سازی XML، CSW، موتور اجرای گردش کار و یک کره مجازی است. این لایه وظیفه تکمیل نقشه برداری از خدمات منابع به توابع خاص را بر عهده دارد. لایه تجاری هسته سیستم است و مجموعه ای از عملکردها از جمله مدل سازی، مدیریت، اجرا و تجسم را ارائه می دهد. علاوه بر عملیات برای دستیابی به مدیریت RAP. لایه ارائه مجموعه ای از رابط های کاربری گرافیکی را ارائه می دهد که می تواند برای ارتباط و تعامل با سیستم و برای انجام تجارت و عملیات تعریف شده در لایه تجاری استفاده شود.
این سیستم از چهار عملکرد اصلی تشکیل شده است: مدل سازی، مدیریت، اجرا و تجسم. ماژول مدلسازی یک رابط بصری و ابزار جادوگر برای مدلسازی سریع RAP بر اساس اطلاعات خاص و الگوهای فرامدل فرآیند فراهم میکند. مدل سازی RAP در شکل 9 نشان داده شده است. از طریق این رابط، کاربر می تواند اطلاعات سرویس RAP سازماندهی شده به عنوان اطلاعات توصیفی یک فرامدل فرآیند را ارائه دهد. پس از ارائه اطلاعات، یک سند توصیفی از RAP در رمزگذاری XML می تواند توسط فناوری طرحواره XML سریال سازی ایجاد شود. ماژول مدیریت عملکردهایی از جمله افزودن، حذف، اصلاح و ثبت نام برای مدیریت یک سری از RAP ها را ارائه می دهد. RAP ایجاد شده توسط رابط مدیریت قابل اجرا و ثبت در مرکز ثبت است. ماژول اجرا نقشه برداری را از اتصال گردش کار به یک گردش کار اجرایی کامل می کند. با اجرای اینترفیس می توان به یک گردش کاری اجرایی ملموس دست یافت. ماژول تجسم تجسم منابع، تجسم خروجی و تجسم RAP را فراهم می کند. مجموعه ای از خدمات منابع، خروجی های هر مرحله،
4.2. مدل سازی RAP برای نشت گاز
برای شبیهسازی مدلسازی RAP، ما تقریباً 200 حسگر فرضی فشار خط لوله گاز را در منطقه شهری اصلی جنوب تایوان در چین قرار دادیم. علاوه بر این، ما به دادههای تقریباً 20 ایستگاه هواشناسی و 6000 ایستگاه پایه سیار در مناطق اصلی شهری دسترسی پیدا کردیم. داده ها توسط SOS ارائه شده است. دادههای فشار خط لوله گاز، دادههای هواشناسی و دادههای ایستگاه پایه سیار در زمان واقعی با یک درخواست GetObservation جمعآوری شدند و مشاهدات به عنوان ورودیهای مؤلفه مشاهده از متا مدل گرفته شدند. علاوه بر این، مدلهای ارزیابی ریسک را برای نشت گاز یکپارچه کردیم و یک سرویس RAP را در قالب یک زنجیره فرآیند توسط SensorML ارائه کردیم. یک خط لوله گاز فشار متوسط به قطر 500 میلی متر با فشار کاری روزانه تقریباً 0.45 مگاپاسکال. 5 مگاپاسکال به عنوان خط لوله انتقال گاز اصلی استفاده شد. در این مطالعه، ما تشخیص ناهنجاریهای سنسور فشار را از ساعت 7:59 تا 8:00 شب شبیهسازی کردیم. تغییر در فشار عملیاتی نشاندهنده وقوع یک رویداد نشت گاز بود. دمای گاز 287 کلوین در خط لوله بود و جدیدترین حسگرهای هواشناسی سرعت باد 4 متر بر ثانیه را در زمان رخداد نشت گاز شبیه سازی شده ارائه کردند. ما تراکم جمعیت تقریباً 2500 نفر در هر کیلومتر را در نزدیکی محل نشت گاز بر اساس داده های ایستگاه پایه تلفن همراه در زمان واقعی تعیین کردیم. و جدیدترین حسگرهای هواشناسی سرعت باد 4 متر بر ثانیه را در زمان رخداد نشت گاز شبیه سازی شده ارائه کردند. ما تراکم جمعیت تقریباً 2500 نفر در هر کیلومتر را در نزدیکی محل نشت گاز بر اساس داده های ایستگاه پایه تلفن همراه در زمان واقعی تعیین کردیم. و جدیدترین حسگرهای هواشناسی سرعت باد 4 متر بر ثانیه را در زمان رخداد نشت گاز شبیه سازی شده ارائه کردند. ما تراکم جمعیت تقریباً 2500 نفر در هر کیلومتر را در نزدیکی محل نشت گاز بر اساس داده های ایستگاه پایه تلفن همراه در زمان واقعی تعیین کردیم.
4.2.1. مدل سازی RAP بر اساس مشاهدات
مدل سازی RAP برای نشت گاز بر اساس مشاهدات قبل از رویداد انجام شد. یک RAP بر اساس مشاهدات می تواند به سرعت UHE ها را شناسایی کند و همچنین می تواند پارامترهای مدل نامشخص را در فرآیند ارزیابی تعیین کند. سنسور فشار به عنوان نقطه شروع اجرای RAP برای نشان دادن اینکه آیا فاجعه رخ داده است توصیف می شود. اطلاعات مکانی-زمانی از سنسور فشار خط لوله گاز به طور خودکار به ویژگی های مکانی-زمانی متا مدل منتقل می شود تا گستره زمانی- مکانی تقریبی یک UHE را تعیین کند. هر بار که داده های جدید وارد می شد، داده های زمان شروع و مکان یکسان بود، در حالی که مقدار زمان پایان تجدید می شد. سپس شناسه RAP، نام، توضیحات و اطلاعات طبقه بندی اضافه شد و اطلاعات مدیریت و محدودیت وارد شد. متا مدل RAP بر اساس این پارامترها توسعه یافت. نتایج مدلسازی پس از به دست آمدن کلیه اطلاعات در مرکز ثبت ثبت شد. متا مدل ثبت شده را می توان در آینده توسط ماژول مدیریت اصلاح و حذف کرد. در نهایت، ماموریت بر اساس الزامات ارزیابی ریسک و مدلهای تطبیق، وارد یک زنجیره فرآیند شد و دادههای مربوط به مدل، از جمله آدرس، ورودی، خروجی، پارامترها، روشهای فرآیند و سایر اطلاعات، در گفتگوی الگوی مدل وارد شد. جعبه خروجی هر مرحله ارزیابی به عنوان ورودی مرحله بعدی در کل RAP استفاده شد. با این حال، زنجیره فرآیند را نمیتوان مستقیماً توسط یک موتور اجرایی محرک آنالیز و اجرا کرد. باید در یک نمونه خاص از زنجیره فرآیند (به عنوان مثال،
4.2.2. اجرای RAP
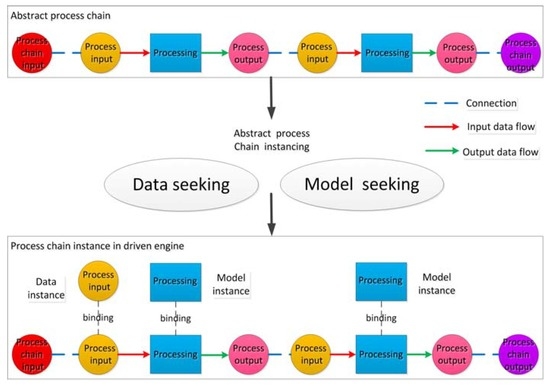
اجرای RAP در زمان وقوع این رویداد انجام شد. RAP تنها به عنوان یک زنجیره فرآیند انتزاعی ارزیابی ریسک توصیف شده است و قابل اجرا نیست. برای یک UHE شبیه سازی شده خاص، لازم بود یک RAP انتزاعی برای دستیابی به ارزیابی ریسک فوری ایجاد شود. فرآیند نمونهسازی به اتصال مدل ارزیابی ریسک خاص و خدمات دادهای برای تشکیل یک سرویس زنجیرهای اجرایی میرسد. نمونه سازی زنجیره فرآیند در شکل 10 نشان داده شده است. اطلاعات مدل به سرویس مدل اجرا شده متصل شد. پارامترهای سرویس توسط آدرس به سرویس مدل منتقل شدند و سپس سرویس مدل آغاز شد. در نهایت RAP نتایج محاسبه شده را دریافت کرد و وارد فرآیند فرعی بعدی شد. علاوه بر این، SOS میتواند دادههای نظارت حسگر را از طریق رابط GetObservation در پیوند سرویسهای داده ارائه کند. نمونهسازی سرویس بهطور متوالی هر زیرفرآیند را اجرا میکرد تا اینکه اجرای کل سرویس RAP تکمیل شود. اجرای فرآیندهای فرعی به طور همزمان نظارت شد.
رویداد نشت گاز از طریق پایش غیرعادی تشخیص داده شد. سنسور فشار از دو نوع سنسور تشکیل شده است: سنسور فشار خط لوله گاز و سنسور غلظت گاز. هنگامی که هر دو نوع سنسور به طور همزمان مقادیر غیرعادی دریافت کردند، ما قادر به شناسایی رویداد نشت گاز بودیم. ما نشت گاز را از ساعت 7:59 تا 20:00 در 21 مه 2016 شبیهسازی کردیم. مقدار فشار خط لوله گاز در 0.1 مگاپاسکال غیرعادی بود، و سنسور غلظت گاز 10.12 Kap بود. محدوده مقدار نرمال 1.5 Kap-2.5 Kap است. دمای خط لوله گاز 287 کلوین بود و زمان نشتی با توجه به فرکانس دریافت اطلاعات سنسور در 60 ثانیه تعیین شد. بر اساس پارامترهای نظارتی مانند فشار و چگالی گاز علاوه بر زمان نشتی، مقدار گاز نشتی را می توان با اتصال مدل مدل سوراخ کوچک یا مدل شکستگی در مرحله سنجش محاسبه کرد. دبی گاز نشتی که 2/54 کیلوگرم بر ثانیه محاسبه شد، در مرحله بعد وارد شد.
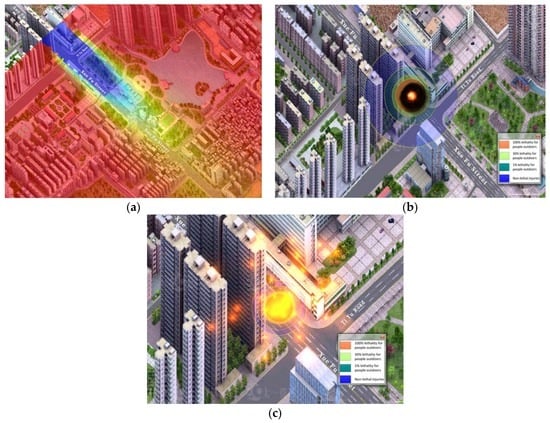
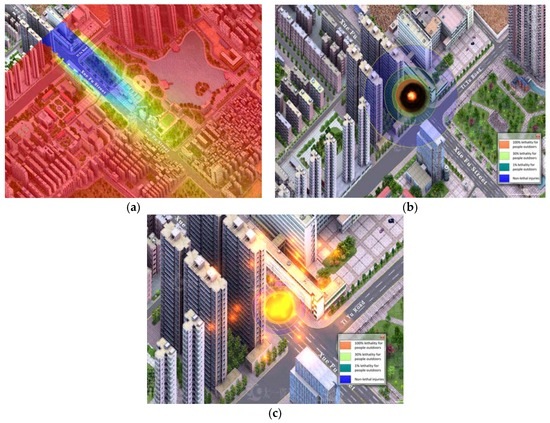
در این مطالعه، سه رویداد ثانویه نشت گاز شامل انتشار گاز، آتش سوزی و انفجار ابر بخار در مرحله شناسایی مورد بحث قرار گرفت. منطقه خطر توسط سه مدل مربوطه شناسایی شد: مدلهای انتشار گاوسی، آتش سوزی و انفجار ابر بخار. سرعت باد در زمان نشت گاز 4.0 متر بر ثانیه بود و جهت داده های پایش هواشناسی به عنوان پارامترهای ورودی مدل برای کمک به تعیین جهت انتشار گاز و غلظت نزدیک به محل نشت گاز مورد نیاز بود. علاوه بر این، ما توانستیم یک کره آتش و انفجار را بر اساس سرعت جریان گاز نشتکننده در مرحله قبل تولید کنیم. نتایج خاص ارزیابی ریسک در مرحله شناسایی در شکل 11 نشان داده شده است .
در مرحله تجزیه و تحلیل، میزان مرگ و میر ناشی از حوادث ثانویه، از جمله مسمومیت، شار تابش حرارتی، و امواج ضربه ای، بر اساس دامنه خطر این رویدادها تجزیه و تحلیل و محاسبه شد. خروجی مبنایی برای محاسبه ریسک های فردی و اجتماعی در مرحله بعد بود.
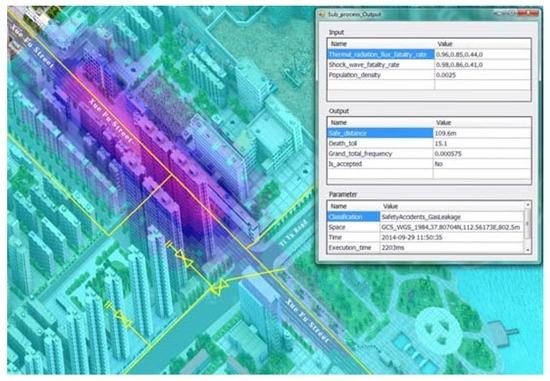
در نهایت نتایج ارزیابی ریسک فردی و اجتماعی در مرحله ارزیابی خروجی داده شد. ریسک فردی برای ایجاد یک نقشه سطح کانتور بر اساس احتمال و میزان مرگ و میر حوادث ثانویه محاسبه شد. ریسک اجتماعی از ریسک فردی و تراکم جمعیت در زمان واقعی محاسبه شد که 0025/0 نفر در متر مربع تعیین شد. نتیجه ارزیابی تعداد فوت شدگان 25.97 نفر محاسبه شد. فراوانی حادثه خط لوله 5.75 × 10-4 در سال بود. منحنی معیارهای ریسک اجتماعی (F-N) در شکل 12 نشان داده شده است. محور افقی تعداد کشته شدگان و محور عمودی فراوانی تصادف خط لوله را نشان می دهد. می توان با توجه به نیازهای واقعی، محدوده قابل قبول را به عنوان معیار ریسک اجتماعی مشخص کرد. همانطور که در شکل 12 نشان داده شده است، ما تشخیص دادیم که ریسک اجتماعی ایجاد شده قابل قبول نیست و باید از اقدامات مناسب برای کاهش ریسک استفاده شود.
در سناریوی تجربی، ما یک رویداد نشت گاز را در منطقه اصلی شهری جنوبی تایوان، چین شبیهسازی کردیم و یک RAP برای نشت گاز بر اساس چهار مرحله (حسگر، تشخیص، تجزیه و تحلیل و ارزیابی) اجرا کردیم. ما به مکملی بین سنسورهای چند منبع و مدلهای ارزیابی ریسک دست یافتیم، پارامترهای مدل نامشخص را توسط حسگرها در مراحل مختلف ارزیابی تعیین کردیم و بلافاصله کل RAP را اجرا کردیم. نتایج تجربی شامل شناسایی سه رویداد ثانویه بالقوه، تجزیه و تحلیل میزان مرگ و میر سه رویداد بالقوه، و ارزیابی ریسک فردی و ریسک اجتماعی در منطقه نزدیک به خط لوله نشتکننده بود.
4.2.3. تجسم RAP
در این مطالعه، خروجی هر مرحله در کل RAP توسط فناوری سه بعدی GIS و فناوری انیمیشن بر اساس یک کره مجازی برای کمک به مدیران برای دستیابی به درک شهودی از پیشبینی روند UHE مشاهده شد. کره مجازی ارائه شده توسط این سیستم از تصاویر گرافیکی دو بعدی و سه بعدی پشتیبانی می کند. برای برجسته کردن نتایج ارزیابی ریسک، تصاویر گرافیکی دوبعدی را انتخاب کردیم. ماژول تجسم سه نوع تجسم نظارت UHE و RAP آن را ارائه کرد: (1) تجسم اطلاعات حسگر و محیط اطراف آن. (2) تجسم اطلاعات رویداد و رویدادهای ثانویه. و (3) تجسم نتایج ارزیابی مبتنی بر مرحله. سه نوع تجسم در کل RAP استفاده شد.
در مرحله سنجش، اطلاعات سنسور فشار خط لوله گاز (شامل نوع، مقدار، مکان، زمان و فرکانس) مشاهده شد. هنگامی که نشت گاز رخ داد، خروجی ارزیابی مرحله، جرم گاز نشت شده بود. اطلاعات رویداد و شدت رویداد برای منعکس کردن جرم گاز نشتشده در یک صحنه سهبعدی تجسم شد. در مرحله شناسایی، اطلاعات مربوط به پیشبینی رویداد ثانویه، مانند انتشار گاز، آتشسوزی و انفجار ابر بخار، مشخص شد، همانطور که در شکل 13 نشان داده شده است.. انتشار گاز بر روی یک نقشه کانتور دو بعدی و انفجارها و آتش سوزی ها در یک مدل سه بعدی پویا بر اساس فناوری سیستم ذرات تجسم شد. محدوده مکانی ریسک رویدادهای ثانویه، به عنوان خروجی ارزیابی مرحله، به عنوان ویژگی روی نقشه نمایش داده شد. در مرحله تحلیل، توزیع فضایی نرخ تسهیلات که با سه نوع رویداد ثانویه مطابقت داشت در نقشه سطح کانتور مشاهده شد. در مرحله ارزیابی، نتایج محاسبه ریسکهای فردی و اجتماعی با دادههای خط لوله گاز و دادههای تصویر هوایی نمایش داده شد. ارزیابی ریسک فردی با نقشه سطح کانتور در شکل 14 توضیح داده شده است .
5. بحث
5.1. فرآیند ارزیابی ریسک بر اساس محیط وب حسگر
ما یک روش مدل سازی RAP فوری بر اساس SWE توسعه دادیم. در مقایسه با روشهای RAP فوری موجود مانند چارچوب ارزیابی ریسک عمومی مبتنی بر GIS [ 7]، که به یک دستگاه حسگر منفرد بستگی دارد، روش پیشنهادی در این مقاله بر اساس SWE است، که به مدیریت یکپارچه دادههای حسگر ناهمگن چند منبعی برای ایجاد تسهیلات، هواشناسی، تراکم جمعیت و سایر پارامترهای مدل نامشخص در محل یک UHE مشاهدات حسگر و گردش کار پردازش حسگر به عنوان پارامترهای ورودی فرآیندهای فرعی در تمام مراحل RAP محدود شده است و می تواند برخی از پارامترهای مدل نامشخص یک RAP را تعیین کند. سنسورهای فشار خط لوله گاز زمان، شدت و مکان نشت گاز شبیه سازی شده را تعیین کردند. این پارامترهای نامشخص از مدل سوراخ کوچک بودند. سنسورهای هواشناسی پارامترهای نامشخص (سرعت و جهت باد) مدل انتشار گاوسی را برای محاسبه جهت و دامنه انتشار تعیین کردند. داده های ایستگاه پایه سیار، تراکم جمعیت را برای مدل ارزیابی ریسک اجتماعی تعیین کرد. علاوه بر این، آنها برای بهبود کارایی اجرای RAP مفید بودند. فاکتورهای مستقیم القای فاجعه از حسگرهای ناهمگن برای کشف خدمات RAP که اساس RAP بودند، توصیف شدند. آنها نشان دادند که آیا مقادیر غیرعادی مشاهده شده منجر به UHE می شود یا خیر. اگر چنین باشد، تأثیرات فیزیکی و حوزههای نفوذ بر اساس مشاهداتی مانند دادههای هواشناسی در مرحله شناسایی شناسایی میشوند. تراکم جمعیت در زمان واقعی می تواند برای تعیین مدل ارزیابی ریسک اجتماعی به عنوان پارامترهای ورودی در مرحله ارزیابی ارائه شود. گره های حسگر ناهمگن نقش مهمی در کل RAP ایفا کردند. از این رو، RAP بر اساس مشاهدات مکانی-زمانی می تواند پارامترهای مدل نامشخص در RAP ها را تعیین کند و به RAP های فوری دست یابد. با این حال، عدم قطعیت داده های حسگر و نحوه انتشار آنها در اجرای یک زنجیره RAP به اندازه کافی در این مقاله در نظر گرفته نشده است.
5.2. زنجیره های فرآیند ارزیابی ریسک برای یکپارچه سازی جامع منابع اطلاعات شهری
ما یک RAP فوری در قالب یک زنجیره فرآیند مبتنی بر SensorML ایجاد کردیم. در مقایسه با روشهای کمی RAP سنتی، مانند روش ARAMIS [ 6]، که تنها بر اساس اطلاعات و مدلهای محدود به RAP تاخیری دست مییابد، نمیتواند پشتیبانی تصمیم فوری برای پاسخهای اضطراری ارائه دهد. روش پیشنهادی در این مقاله با یکپارچهسازی منابع اطلاعاتی شهری متعدد، از جمله خدمات مشاهده، مدلهای ارزیابی ریسک و اطلاعات آرشیو تاریخی، که برای تسهیل یکپارچهسازی کارآمد منابع اطلاعاتی طبقهبندی و مدیریت شدند، به زنجیره RAP دست یافت. این منابع اطلاعاتی در یک RAP با چهار مرحله ادغام شدند: سنجش، تشخیص، تجزیه و تحلیل و ارزیابی. این منابع اطلاعاتی به طور مرتب در یک RAP با توجه به الزامات مأموریت ارزیابی در مراحل مختلف توصیف می شوند. یک RAP قابل اجرا با این روش تولید شد که شامل شرح اطلاعات فرآیند انتزاعی، نمونه سازی فرآیند و اجرای فرآیند می باشد. برای انواع UHE ها، ما می توانیم منابع ریسک را زیر نظر داشته باشیم، منابع ریسک را به سرعت کشف کنیم، بلافاصله خطرات بالقوه و تاثیر آنها را ارزیابی کنیم و نتایج ارزیابی ریسک را در هر مرحله به اشتراک بگذاریم تا حمایت تصمیم گیری را برای تصمیم گیرندگان فراهم کنیم. با این حال، به دلیل ادغام سرویسهای مشاهده، مدلها و خدمات RAP، پیچیدگی محاسباتی سیستم و نیاز به منابع ذخیرهسازی نیز افزایش مییابد. روش زنجیره ای RAP به عنوان یک روش مدل سازی استاتیک برای استفاده قبل از UHE ایجاد شد. با این حال، وقوع یک رویداد مخاطره آمیز اغلب دارای ویژگی هایی با عوامل تصادفی است که بر کارایی و دقت زنجیره RAP تأثیر می گذارد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. ما میتوانیم منابع ریسک را رصد کنیم، به سرعت منابع ریسک را کشف کنیم، بلافاصله ریسکهای بالقوه و تأثیر آنها را ارزیابی کنیم و نتایج ارزیابی ریسک را در هر مرحله به اشتراک بگذاریم تا حمایت تصمیمگیری را برای تصمیمگیرندگان فراهم کنیم. با این حال، به دلیل ادغام سرویسهای مشاهده، مدلها و خدمات RAP، پیچیدگی محاسباتی سیستم و نیاز به منابع ذخیرهسازی نیز افزایش مییابد. روش زنجیره ای RAP به عنوان یک روش مدل سازی استاتیک برای استفاده قبل از UHE ایجاد شد. با این حال، وقوع یک رویداد مخاطره آمیز اغلب دارای ویژگی هایی با عوامل تصادفی است که بر کارایی و دقت زنجیره RAP تأثیر می گذارد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. ما میتوانیم منابع ریسک را رصد کنیم، به سرعت منابع ریسک را کشف کنیم، بلافاصله ریسکهای بالقوه و تأثیر آنها را ارزیابی کنیم و نتایج ارزیابی ریسک را در هر مرحله به اشتراک بگذاریم تا حمایت تصمیمگیری را برای تصمیمگیرندگان فراهم کنیم. با این حال، به دلیل ادغام سرویسهای مشاهده، مدلها و خدمات RAP، پیچیدگی محاسباتی سیستم و نیاز به منابع ذخیرهسازی نیز افزایش مییابد. روش زنجیره ای RAP به عنوان یک روش مدل سازی استاتیک برای استفاده قبل از UHE ایجاد شد. با این حال، وقوع یک رویداد مخاطره آمیز اغلب دارای ویژگی هایی با عوامل تصادفی است که بر کارایی و دقت زنجیره RAP تأثیر می گذارد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. به سرعت منابع ریسک را کشف کنید، بلافاصله خطرات بالقوه و تأثیر آنها را ارزیابی کنید و نتایج ارزیابی ریسک را در هر مرحله به اشتراک بگذارید تا از تصمیم گیرندگان حمایت شود. با این حال، به دلیل ادغام سرویسهای مشاهده، مدلها و خدمات RAP، پیچیدگی محاسباتی سیستم و نیاز به منابع ذخیرهسازی نیز افزایش مییابد. روش زنجیره ای RAP به عنوان یک روش مدل سازی استاتیک برای استفاده قبل از UHE ایجاد شد. با این حال، وقوع یک رویداد مخاطره آمیز اغلب دارای ویژگی هایی با عوامل تصادفی است که بر کارایی و دقت زنجیره RAP تأثیر می گذارد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. به سرعت منابع ریسک را کشف کنید، بلافاصله خطرات بالقوه و تأثیر آنها را ارزیابی کنید و نتایج ارزیابی ریسک را در هر مرحله به اشتراک بگذارید تا از تصمیم گیرندگان حمایت شود. با این حال، به دلیل ادغام سرویسهای مشاهده، مدلها و خدمات RAP، پیچیدگی محاسباتی سیستم و نیاز به منابع ذخیرهسازی نیز افزایش مییابد. روش زنجیره ای RAP به عنوان یک روش مدل سازی استاتیک برای استفاده قبل از UHE ایجاد شد. با این حال، وقوع یک رویداد مخاطره آمیز اغلب دارای ویژگی هایی با عوامل تصادفی است که بر کارایی و دقت زنجیره RAP تأثیر می گذارد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. فوراً خطرات بالقوه و تأثیر آنها را ارزیابی کنید و نتایج ارزیابی ریسک را در هر مرحله به اشتراک بگذارید تا پشتیبانی تصمیم گیری برای تصمیم گیرندگان فراهم شود. با این حال، به دلیل ادغام سرویسهای مشاهده، مدلها و خدمات RAP، پیچیدگی محاسباتی سیستم و نیاز به منابع ذخیرهسازی نیز افزایش مییابد. روش زنجیره ای RAP به عنوان یک روش مدل سازی استاتیک برای استفاده قبل از UHE ایجاد شد. با این حال، وقوع یک رویداد مخاطره آمیز اغلب دارای ویژگی هایی با عوامل تصادفی است که بر کارایی و دقت زنجیره RAP تأثیر می گذارد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. فوراً خطرات بالقوه و تأثیر آنها را ارزیابی کنید و نتایج ارزیابی ریسک را در هر مرحله به اشتراک بگذارید تا پشتیبانی تصمیم گیری برای تصمیم گیرندگان فراهم شود. با این حال، به دلیل ادغام سرویسهای مشاهده، مدلها و خدمات RAP، پیچیدگی محاسباتی سیستم و نیاز به منابع ذخیرهسازی نیز افزایش مییابد. روش زنجیره ای RAP به عنوان یک روش مدل سازی استاتیک برای استفاده قبل از UHE ایجاد شد. با این حال، وقوع یک رویداد مخاطره آمیز اغلب دارای ویژگی هایی با عوامل تصادفی است که بر کارایی و دقت زنجیره RAP تأثیر می گذارد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. و نتایج ارزیابی ریسک را در هر مرحله به اشتراک بگذارید تا حمایت تصمیم گیری برای تصمیم گیرندگان فراهم شود. با این حال، به دلیل ادغام سرویسهای مشاهده، مدلها و خدمات RAP، پیچیدگی محاسباتی سیستم و نیاز به منابع ذخیرهسازی نیز افزایش مییابد. روش زنجیره ای RAP به عنوان یک روش مدل سازی استاتیک برای استفاده قبل از UHE ایجاد شد. با این حال، وقوع یک رویداد مخاطره آمیز اغلب دارای ویژگی هایی با عوامل تصادفی است که بر کارایی و دقت زنجیره RAP تأثیر می گذارد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. و نتایج ارزیابی ریسک را در هر مرحله به اشتراک بگذارید تا حمایت تصمیم گیری برای تصمیم گیرندگان فراهم شود. با این حال، به دلیل ادغام سرویسهای مشاهده، مدلها و خدمات RAP، پیچیدگی محاسباتی سیستم و نیاز به منابع ذخیرهسازی نیز افزایش مییابد. روش زنجیره ای RAP به عنوان یک روش مدل سازی استاتیک برای استفاده قبل از UHE ایجاد شد. با این حال، وقوع یک رویداد مخاطره آمیز اغلب دارای ویژگی هایی با عوامل تصادفی است که بر کارایی و دقت زنجیره RAP تأثیر می گذارد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. پیچیدگی محاسباتی سیستم و نیاز به منابع ذخیره سازی نیز افزایش می یابد. روش زنجیره ای RAP به عنوان یک روش مدل سازی استاتیک برای استفاده قبل از UHE ایجاد شد. با این حال، وقوع یک رویداد مخاطره آمیز اغلب دارای ویژگی هایی با عوامل تصادفی است که بر کارایی و دقت زنجیره RAP تأثیر می گذارد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. پیچیدگی محاسباتی سیستم و نیاز به منابع ذخیره سازی نیز افزایش می یابد. روش زنجیره ای RAP به عنوان یک روش مدل سازی استاتیک برای استفاده قبل از UHE ایجاد شد. با این حال، وقوع یک رویداد مخاطره آمیز اغلب دارای ویژگی هایی با عوامل تصادفی است که بر کارایی و دقت زنجیره RAP تأثیر می گذارد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد. این بزرگترین محدودیت روش مدل سازی RAP است. در آینده، ما بر روی مدلسازی پویا یک RAP برای عوامل تصادفی در طول UHE تمرکز خواهیم کرد.
5.3. توسعه پذیری فرآیند ارزیابی ریسک
ما یک معماری متا مدل توسعهیافته مبتنی بر MOF و مدیریت یکپارچه انواع RAP با استفاده از ساختار توصیف اطلاعات 10 تایی ایجاد کردیم. در مقایسه با RAP های سنتی، که به اطلاعات محدود وابسته هستند و یک مشکل شهری را حل می کنند، رویکرد پیشنهادی دارای مکانیزم گسترش منابع ارزیابی و سایر کاربردهای UHE است. RAPهایی که در حال حاضر استفاده می شوند اغلب بر اساس منابع اطلاعاتی محدودی هستند که نمی توانند مکانیسم های گسترش منابع اطلاعاتی را پشتیبانی کنند. بر اساس آزمایش مدلسازی RAP، یک متا مدل RAP ایجاد شد که انواع منابع اطلاعاتی را در یک چارچوب یکپارچه برای ارزیابی و پیشبینی یک رویداد نشت گاز شهری یکپارچه میکند. ویژگی های کلی این RAP ها توسط یک ساختار توصیف اطلاعات 10 تایی سازماندهی شد که اطلاعات مشخصه کلی را برای ارزیابی ریسک ارائه می کرد. سایر منابع خدماتی، از جمله مشاهدات حسگر و خدمات مدل، را می توان با اصلاح ماموریت، مشاهده و اطلاعات مدل از ساختار توضیحات اطلاعات 10 تایی محدود کرد. بنابراین، منابع اطلاعاتی RAP قابل گسترش هستند.
علاوه بر این، روش مدلسازی RAP را میتوان به برنامههای کاربردی دیگر تعمیم داد. اطلاعات توصیف متا مدل RAP مشابه است، به جز اطلاعات فرآیند، که اطلاعات مربوط به ماموریت، مشاهده و مدل را ارائه می دهد. یک برنامه UHE اضافی یک RAP برای سیل است. اطلاعات مشاهداتی از اطلاعات 10 تایی حاوی داده هایی در مورد سطح آب، بارندگی و تراکم جمعیت است. اطلاعات مدل از اطلاعات 10 تایی شامل مدلهایی برای پیشبینی سطح آب، مناطق سیل و ارزیابی خطر اجتماعی است. RAP سیل شامل پیشبینی سطح آب، پیشبینی سیل، شناسایی منطقه سیل، تجزیه و تحلیل تلفات و ارزیابی خطر اجتماعی با توجه به نیازهای مختلف در مراحل مختلف ارزیابی است. بنابراین، روش RAP را می توان به سایر برنامه های UHE تعمیم داد که نیاز به مطالعه بیشتر دارد.
6. نتیجه گیری
برای UHEهای مکرر، نظارت بلادرنگ و RAP فوری نقش فزایندهای در پیشگیری و کاهش خطرات بازی میکنند. علاوه بر این، پارامترهای مدل نامشخص در یک RAP محدودیت های اصلی کارایی اجرای RAP هستند. در این مطالعه، ما یک روش مدلسازی RAP با ساختار توصیف اطلاعات 10 تایی برای انتزاع اطلاعات مشخصه RAP و ادغام مدیریت RAPهای متعدد پیشنهاد کردیم. بر اساس چهار مرحله ارزیابی، ما به تجمیع سریع خدمات مشاهده و مدل، اجرای فوری یک RAP و تجسم نتایج ارزیابی ریسک دست یافتیم. در نهایت، نشت گاز به عنوان مثال برای آزمایش امکانسنجی و مقیاسپذیری روش مدلسازی RAP شبیهسازی شد. نتایج نشان میدهد که روش مدلسازی RAP میتواند به ارزیابی ریسک فوری از طریق مدیریت یکپارچه مشاهدات حسگر و خدمات مدل دست یابد. در حال حاضر، ما می توانیم تنها برخی از پارامترهای مدل نامشخص را در یک RAP با مشاهده حسگر تعیین کنیم. عدم قطعیت مکانی و زمانی داده ها و مکانیسم گسترش تمرکز تحقیقات آینده ما خواهد بود. علاوه بر این، معماری چهار لایه برای متا مدل RAP و توضیحات اطلاعات 10 تایی با مقیاس پذیری خوب تأیید شده است.
ما متعهد به ایجاد یک RAP فوری قابل اجرا و دستیابی به یکپارچه سازی خدمات اطلاعاتی متعدد هستیم. با این حال، کیفیت خدمات برای RAPها در این مقاله مورد بحث قرار نگرفته است. با مدیریت یکپارچه میلیون ها حسگر و خدمات مدل، کارایی اجرای زنجیره RAP کاهش اجتناب ناپذیری را در آینده نشان خواهد داد. اتصال موثر یک شبکه حسگر در مقیاس بزرگ و خدمات اطلاعاتی به ابر موضوع اضافی برای تحقیقات آینده است.





بدون نظر