1. معرفی
با توجه به افزایش تقاضا برای کاربری زمین در مناطق شهری، جهت آینده توسعه شهری شامل گسترش کاربری فعلی زمین به فضاهای بالاتر و زیرزمینی است. با ساختارهای سه بعدی (3D) پیچیده تر، کاداستر دو بعدی (2D) سنتی برای رسیدگی به اشیاء کاداستر سه بعدی پیچیده در مناطق شهری محدودتر می شود. برای رفع این محدودیت ها به یک کاداستر سه بعدی نیاز است. چندین کشور و منطقه شروع به ثبت و مدیریت اشیاء کاداستر سه بعدی پیچیده از طریق مدیریت کاداستر شهری کرده اند [ 1 , 2 , 3 , 4 , 5 , 6 .]. نظریهها و فناوریهای نسبی، از جمله سازماندهی، ذخیرهسازی و جستجوی واحدهای فضایی سه بعدی، اخیراً مورد توجه قرار گرفتهاند.
یک مدل داده کاداستر سه بعدی بر روش هایی برای سازماندهی، ذخیره و نمایش نمایش های فضایی برای اشیاء کاداستر سه بعدی در یک پایگاه داده کاداستر تمرکز دارد. از آنجا که مرزها و حقوق مالکیت زمین باید به طور دقیق در یک ثبت کاداستر تعریف شود، درصد زیادی از مدل های داده کاداستر ساختار واحدهای فضایی سه بعدی را با توصیف روابط توپولوژیکی بین عناصر تشکیل شده نشان می دهد [7 ، 8 ، 9 ] . اکثر مدلهای نمایش دادههای موجود در کاداسترهای سه بعدی سنتی مبتنی بر توپولوژی هستند [ 7 ]. چندین مدل داده کاداستر سه بعدی مبتنی بر توپولوژی، که بر اساس هندسه اقلیدسی (EG) هستند، برای مدیریت کاداستر سه بعدی توسعه یافته اند [ 7 ، 8 ،9 ، 10 ، 11 ، 12 ، 13 ]. از آنجا که فضای EG فاقد فرم یکپارچه در بسط ابعادی است، گسترش از یک کاداستر کلاسیک دو بعدی به یک کاداستر سه بعدی که مبتنی بر EG است مستقیم یا ساده نیست. نمایش واحدهای فضایی سه بعدی پیچیده تر از نمایش واحدهای فضایی دو بعدی در فضای EG است [ 14]] که یکی از موانع اصلی در اجرای کاداستر سه بعدی است. مدلهای دادههای کاداستر مبتنی بر EG هندسه را با توجه به روابط توپولوژیکی خود سازماندهی، ذخیره و نمایش میدهند، که در اشیاء کاداستر سهبعدی در یک پایگاه داده کاداستر موجود است. ساختارها و روابط توپولوژیکی در طول کل فرآیند ذخیره سازی داده ها، نمایش روابط، عملیات، تقسیم حقوق و اعتبارسنجی ثبت و نگهداری می شوند [ 13 ]. مدل های داده کاداستر سه بعدی پذیرفته شده جهانی برای نمایش های فضایی پیچیده کارآمد ساخته نشده اند. نحوه ذخیره و نمایش نمایش های فضایی به طور موثر برای اشیاء کاداستر سه بعدی در یک پایگاه داده همچنان یک چالش در توسعه کاداستر سه بعدی است [ 15 ].
یکی از مسائل اصلی ناشی از تقسیم چند بعدی بودن در فضای EG، جدایی بین نمایش هندسه و نمایش جبر است. عناصر هندسی با ابعاد بالاتر در فضای EG را نمی توان به طور مستقیم و جبری با اجزای هندسی آنها که دارای ابعاد کمتری هستند بیان کرد. جدایی بین بیان هندسه و بیان جبر [ 16 ] وجود دارد که تنوع عبارات متمایز و ساختارهای محاسباتی را در اشیاء با ابعاد مختلف ایجاد می کند. مدلهای دادههای سه بعدی مبتنی بر EG بر توصیف روابط توپولوژیکی بین عناصر ساختاری ابعادی مختلف اشیاء سهبعدی تمرکز دارند [ 7]]. این روش ها برای بازنمایی های فضایی شهودی نیستند. آنها نمی توانند یک ساختار سلسله مراتبی پیچیده، به ویژه ساختار سلسله مراتبی ابعادی در یک کاداستر سه بعدی را به عنوان یک موجودیت مدیریت کنند. روابط توپولوژیکی بین ابعاد مختلف، مانند نقاط، خطوط مرزی، چهرههای مرزی و واحدهای فضایی، معمولاً برای تحقق غیرمستقیم نمایشهای فضایی اشیاء سهبعدی استفاده میشوند [ 17 ، 18 ، 19 ، 20 ]]. به عنوان مثال، خطوط و سطوح به ترتیب با توصیف نقاط و خطوط ساخت و ساز بیان می شوند، در حالی که یک واحد فضایی سه بعدی با ثبت سطوح نسبی نشان داده می شود. اصل مدلهای داده مبتنی بر EG، گسترش سهبعدی روابط توپولوژیکی بین نقاط، خطوط و سطوح در فضای دوبعدی است. در این مدلهای داده، هندسهها تنها شامل نمادهایی میشوند که در پایگاه داده ثبت شده یا توصیف شدهاند، به جای اولیههای محاسباتی واقعی که به صورت جبری نشان داده میشوند. روابط توپولوژیکی در مدل های داده مبتنی بر EG شبیه ساختارهای اتصال بین این هندسه های نمادین است [ 21 ، 22 ، 23]. با توجه به پیچیدگی اشیاء سه بعدی و محدودیت های EG در نمایش اشیاء سه بعدی پیچیده، مدل های داده مبتنی بر EG نمی توانند ادغام هندسه و توپولوژی را به عنوان یک موجودیت درک کنند. اگرچه چندین مطالعه تلاش کرده اند هندسه و توپولوژی را ادغام کنند [ 24 ، 25 ، 26 ]، هیچ کدام به دلیل محدودیت EG به این هدف دست پیدا نکرده اند. برای ادغام نمایش های هندسی و جبری به عنوان یک موجودیت، نظریه های ریاضی جدیدی مورد نیاز است.
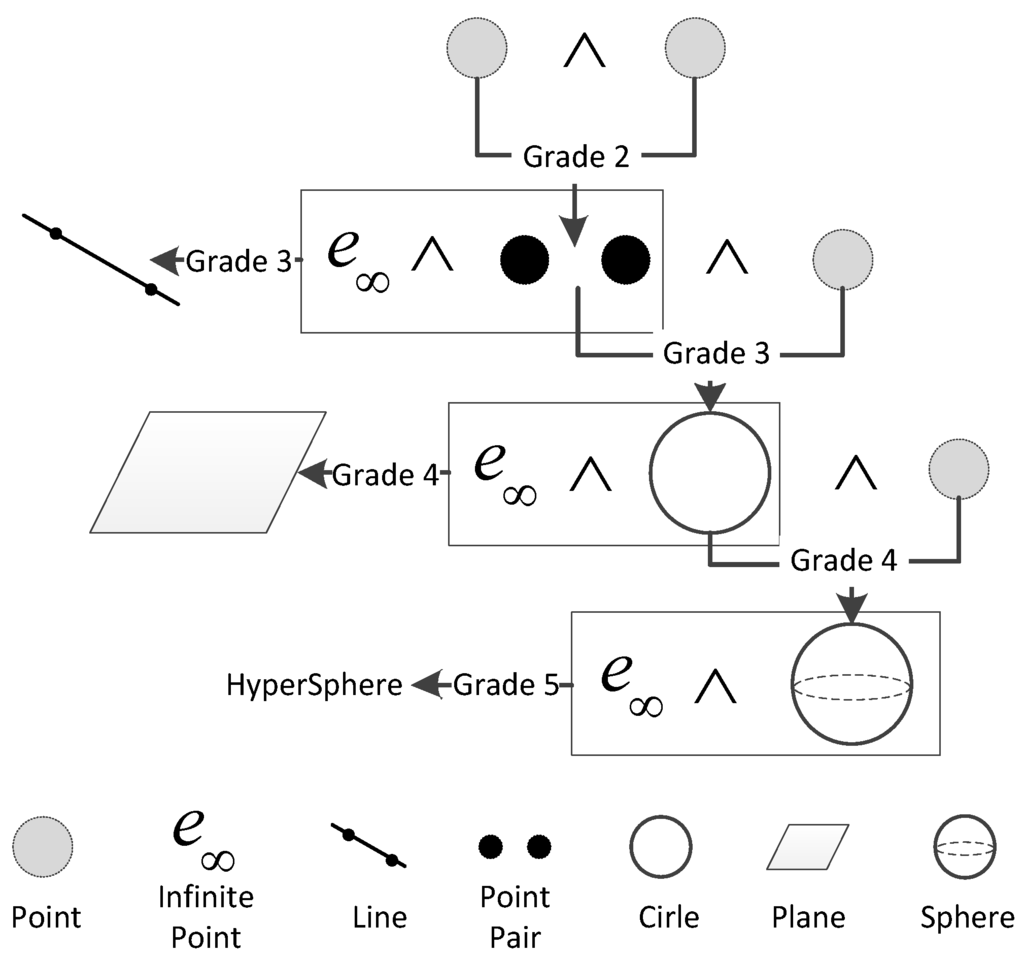
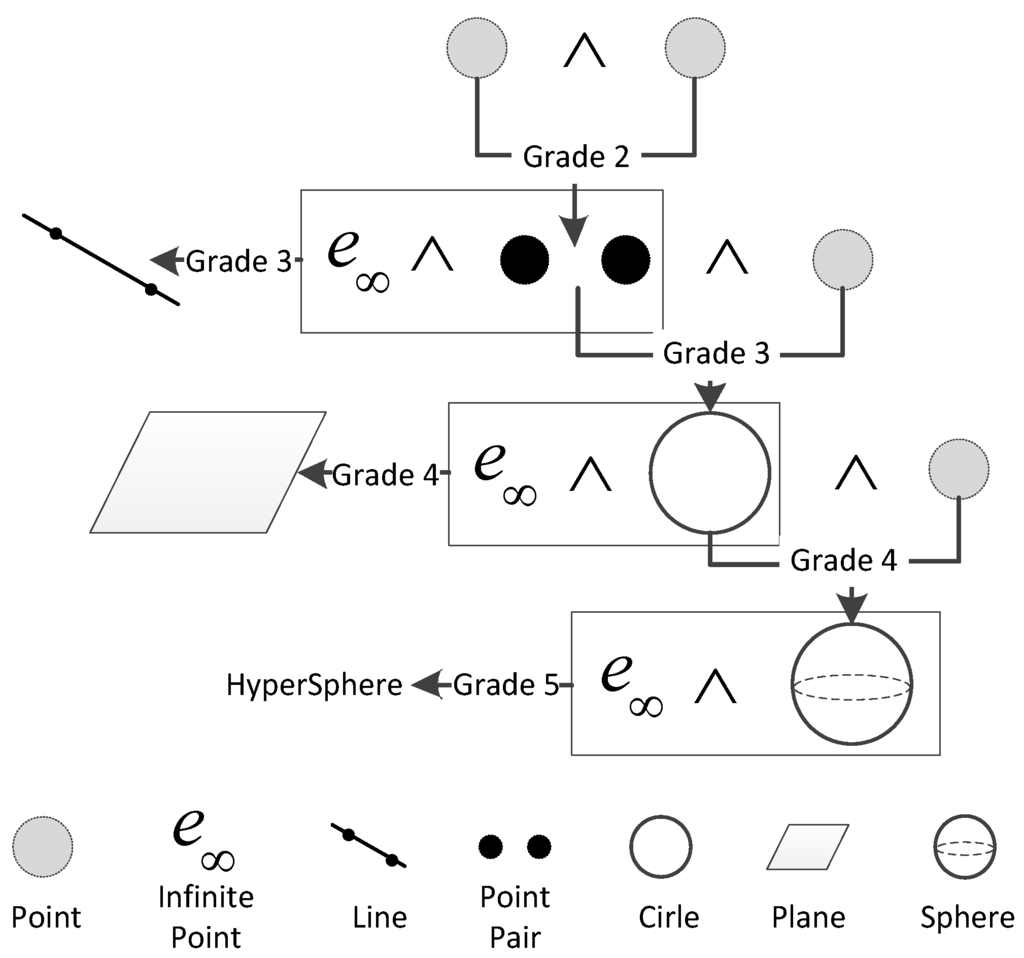
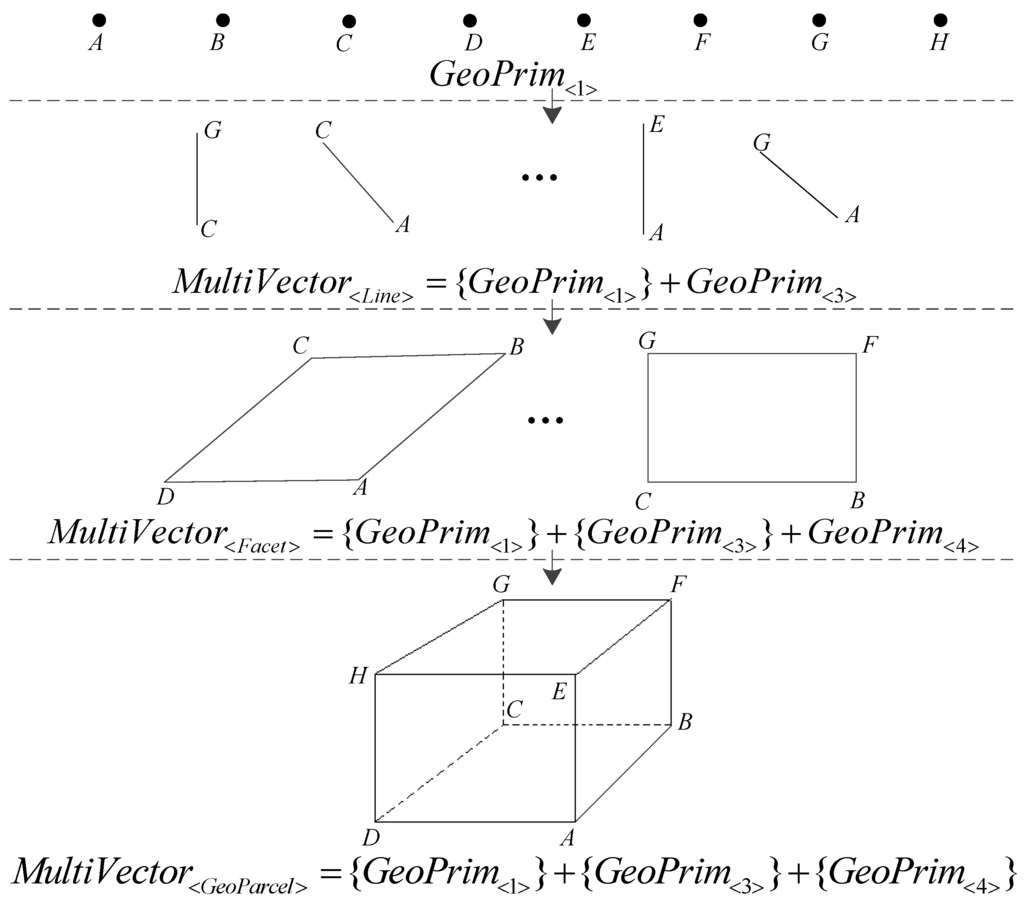
در این مقاله، جبر هندسی منسجم (CGA) به عنوان پایه نظری نمایش های فضایی کاداستر سه بعدی برای حل مشکلات توسعه کاداستر از ساختار دو بعدی به ساختار سه بعدی معرفی شده است. به عنوان شاخه ای از جبر کلیفورد [ 27 ، 28 ]، CGA می تواند نمایش های هندسی و جبری اشیاء فضایی را ادغام کند. CGA همچنین می تواند مسائل هندسی را مستقیماً به روش جبری حل کند [ 29 ]. در مقایسه با EG، عناصر ابعادی مختلف در CGA را می توان به شکل یکپارچه توسط محصولات بیرونی مطابق با ساختار گراسمن بیان کرد، همانطور که در شکل 1 نشان داده شده است.که نشان می دهد ساختار هندسی واحدهای فضایی با ساختار ابعادی گراسمن همخوانی دارد. چندین دستاورد که CGA را به تحقیقات سیستمهای اطلاعات جغرافیایی (GIS) معرفی میکند به شرح زیر است: یک مدل GIS یکپارچه چند بعدی [ 23 ، 30 ]، یک محاسبات تحلیل فضایی [ 31 ، 32 ، 33 ]، و بیان روابط و عملیات توپولوژیکی ادغام [ 34 ، 35 ]. یوان و همکاران (2014) پیشنهاد می کنند که CGA پتانسیل تبدیل شدن به نظریه و فناوری اساسی برای ساخت یک GIS یکپارچه چند بعدی را دارد [ 35]]. بنابراین، پتانسیل بالایی برای خدمت به عنوان پایه ای محکم برای مدل سازی داده های کاداستر سه بعدی دارد.
این مقاله به شرح زیر سازماندهی شده است: در بخش 2 ، ما ایده اساسی ساخت یک مدل داده کاداستر سه بعدی با CGA را بررسی می کنیم. ساخت و توسعه مدل داده های کاداستر سه بعدی در بخش 3 ارائه شده است . هر دو پیاده سازی نظری و تکنولوژیکی مدل داده مورد بحث قرار می گیرند. در بخش 4 ، مدل داده های کاداستر سه بعدی مبتنی بر CGA را با استفاده از مطالعات موردی در دنیای واقعی آزمایش می کنیم. ویژگیها، پیشرفتها و جهتگیریهای آینده مدل دادههای کاداستر سه بعدی در بخش 5 مورد بحث قرار گرفتهاند . ما نتایج خود را در بخش 6 بیان می کنیم .
2. ایده اولیه
یکی از اهداف مدل سازی داده های کاداستر، یکسان سازی نمایش های هندسی و توپولوژیکی است. کلید ادغام هندسه و توپولوژی، نمایش یکپارچه ساختار هندسی و ساختار ابعادی عناصر هندسی با ابعاد مختلف است. این نمایش در EG امکان پذیر نیست زیرا فضای سنتی اقلیدسی فاقد ثبات در نمایش هندسه های ابعاد مختلف است [ 14 ]. برای دستیابی به همگام سازی بین هندسه و توپولوژی در ابعاد مختلف، یک نمایش ریاضی متمایز و یکپارچه و ساختار سازماندهی داده ها ضروری است.
CGA یکی از قدرتمندترین سیستم های جبر هندسی (GA) است. در مقایسه با سایر سیستم های هندسی، مانند هندسه اقلیدسی و هندسه تصویری، CGA دارای مزایای منحصر به فرد ساختار ساده و شهودی، معنای هندسی متمایز و ویژگی های یکپارچه با توجه به بیان هندسه است [35 ، 36 ، 37 ، 38 ] . از آنجا که ساختارهای ابعادی و توپولوژیکی در CGA با ساختار ابعادی گراسمن سازگار است، عناصر بعدی مختلف را میتوان مستقیماً از طریق محصولات بیرونی با نقاط همشکل بیان کرد. ساختار سلسله مراتب گراسمن مشابه ساختارهای توپولوژیکی اجسام با ابعاد مختلف است [ 39]]، که ساخت یک نمایش یکپارچه برای هندسه های ابعادی مختلف در CGA [ 40 ] را امکان پذیر می کند. نمایش یکپارچه ساختار هندسی صرفاً جبری است، که نشان می دهد اشیاء هندسی را می توان به عنوان یک موجود جبری بیان کرد [ 41 ]. با بیان ساختار اجسام هندسی در CGA، روابط توپولوژیکی به طور ضمنی در بیان جبری آنها وجود دارد [ 42 ]. به این ترتیب می توان به نمایش یکپارچه هندسه ها و روابط توپولوژیکی دست یافت.
ابتدایی های اساسی (به عنوان مثال، نقاط، جفت نقطه، خطوط، دایره ها، صفحات و کره ها) در CGA را می توان به طور مداوم با استفاده از محصول بیرونی با ادغام هندسه ها و روابط توپولوژیکی نشان داد. با این حال، نمایش هندسه های دلخواه ممکن است با ساختار سلسله مراتبی گراسمن مناسب نباشد. برای اطمینان از سازگاری با یک مدل داده های GIS موجود، یک مدل داده کاداستر سه بعدی با ساختار پیچیده-ساده تشکیل شده است. به عنوان مثال، هندسه های پیچیده باید از هندسه های ابتدایی تشکیل شوند. در این ترکیب، ساختارهای توپولوژیکی نیز باید کدگذاری شده و در بیان ساختارهای هندسی نمایش داده شوند. اگرچه CGA شامل شش نمونه اولیه است، فقط نقاط، خطوط و سطوح در نمایشهای فضایی به کار گرفته میشوند تا با ویژگیهای نمایش مرزی دقیق کاداستر مطابقت داشته باشند.
ساختار چند برداری که ساختار جبری اساسی در CGA است، اشیاء ابعادی مختلف را ترکیب می کند. در یک ساختار چند برداری، عناصر هندسی ابعادی مختلف که شی کامل را تشکیل میدهند به عنوان زیرفضاهای تیغهای CGA با توجه به درجهها (یعنی ابعاد ) اشیا نشان داده میشوند. ساختار اجسام در وزن، دامنه و جهت مولفه های چند بردار کدگذاری می شوند [ 33 ]. به این ترتیب، نمایش هندسه ها در یک ساختار چند برداری را می توان به صورت جبری بیان کرد. با ساختارهای داده به خوبی تعریف شده (به عنوان مثال، ساختار سلسله مراتبی با توجه به ابعاد [ 35])، روابط توپولوژیکی سازگار را می توان حفظ کرد حتی اگر هندسه های پیچیده نشان داده شود. به عنوان مثال، ما می توانیم واحدهای فضایی کاداستر سه بعدی پیچیده را با توجه به ترکیب نقاط، خطوط و سطوح نشان دهیم. در یک ساختار چند برداری، روابط توپولوژیکی بین این عناصر بعدی مختلف را می توان با استفاده از ضرایب تیغه ها در چند بردار فرموله کرد و روابط ساختاری هندسی را می توان با استفاده از ساختارهای ساختارهای سازمانی چند بعدی به طور کامل بررسی کرد. ساختار چند برداری با ادغام ساختارهای هندسی و توپولوژیکی به صورت جبری، ساختاری یکپارچه و ایده آل برای ذخیره اجسام ابعادی مختلف فراهم می کند.
ما یک مدل داده کاداستر سه بعدی چند بعدی یکپارچه با استفاده از CGA ایجاد کردیم. مقدمه ساخت مدل داده در شکل 2 نشان داده شده است. در مرحله اول، اشیاء کاداستر سه بعدی به اجزای هندسی و توپولوژیکی تجزیه می شوند که می توانیم عناصر سیمپلکس را که از اشیاء پیچیده تشکیل شده اند، بدست آوریم. نقاط منسجم را می توان از مجموعه نقاط اقلیدسی اصلی از طریق بیان در CGA در فاز دوم به دست آورد. این عناصر سیمپلکس، که برای ساخت واحدهای فضایی کاداستر سه بعدی به کار میروند، میتوانند به طور پیوسته با مجموعههای نقطهای منسجم با استفاده از عملیات محصول بیرونی در CGA در فاز سوم نمایش داده شوند. واحدهای فضایی کاداستر سه بعدی پیچیده از طریق ساختار چند برداری بیان میشوند، که در آن سادهسازیهای ابعادی مختلف برای تحقق یک بیان واحد برای اطلاعات هندسی و روابط توپولوژیکی ادغام میشوند.
3. روش ها
3.1. نمایش یکپارچه هندسی و توپولوژیکی در CGA
با استفاده از طرح ریزی کروی غیرخطی، فضای اقلیدسی در فضایی با ابعاد بالا تعبیه شده است، که در معرض یک تبدیل طرح همگن برای به دست آوردن مدل همسان هندسه اقلیدسی است [33، 43] ، که در آن ه1،ه2،ه3،ه0،ه∞ه1،ه2،ه3،ه0،ه∞پنج بردار هستند که فضا را پشتیبانی می کنند آر4 ، 1آر4،1و x ، y، zایکس،�،�مختصات فضای اقلیدسی ضرایب است ه1،ه2،ه3ه1،ه2،ه3بردارها به ترتیب. در این صفحه، ه0ه0نشان دهنده مبدا مختصات پایه است که ضریب آن معمولاً در CGA ثابت نگه داشته می شود و ه∞ه∞نقطه بینهایت است که ضرایب آن را می توان با مختصات اقلیدسی محاسبه کرد. حاصلضرب بیرونی دو بردار دلخواه در CGA به صورت زیر تعریف می شود:
تعریف 1: اگر a و b دو بردار در فضای منسجم باشند آر4 ، 1آر4،1، محصول بیرونی به صورت تعریف می شود
که در آن ab و ba هر دو محصول هندسی بردارهای a و b هستند [ 41 ] که اسکالرها و دوبردارها را تولید می کنند. این تعریف نشان می دهد که ابعاد اجسام هندسی را می توان بر اساس عملکرد محصول بیرونی کدگذاری کرد.
اجسام هندسی با ابعاد مختلف در فضای همشکل توسط محصول بیرونی ساخته میشوند که میتواند شکل بیان یکنواخت را برای اجسام هندسی ابعادی مختلف تحقق بخشد. با معرفی دو بعد اضافی مبدأ و نقطه بینهایت، ساختار ابعادی شی هندسی به طور کامل با ساختار گراسمن در فضای منسجم مطابقت دارد [ 30 ]. توانایی بیان موجودات هندسی در CGA به طور قابل توجهی گسترش یافته است. این ویژگیها اجسام هندسی با ابعاد مختلف در CGA را قادر میسازد که مستقیماً از طریق حاصل ضرب بیرونی مجموعههای نقطهای منسجم ساخته شوند که در جدول 1 نشان داده شده است.. به عنوان مثال، حاصل ضرب بیرونی دو نقطه همشکل، که شامل یک زیرفضای یک بعدی (1D) در CGA است، میتواند مستقیماً جفتهای نقطه زیرفضای دوبعدی را بیان کند. خطوط منسجم که شامل یک زیرفضای سه بعدی هستند را می توان با یک محصول بیرونی زیرفضای دوبعدی با نقطه بی نهایت نشان داد. ه∞ه∞در حالی که یک صفحه با حاصلضرب بیرونی سه نقطه همشکل و نقطه بینهایت بیان میشود ه∞ه∞. جدول 1 اشیاء هندسی پایه را فهرست می کند که با حاصل ضرب بیرونی نقاط منسجم در CGA بیان می شوند. همانطور که در جدول نشان داده شده است، اجسام هندسی ابعادی مختلف از یک روش بیان یکنواخت در CGA پیروی می کنند. خط و دایره و صفحه و کره در CGA به ترتیب به شکل بیانی یکپارچه و معنای هندسی دست می یابند [ 34 ، 44 ].
چند برداری یک عنصر ریاضی پایه است که می تواند به طور همزمان اشیاء چند بعدی را در CGA ادغام کند. بیان یکپارچه چند بعدی یک شی هندسی مشترک توسط یک چند بردار در فضای همشکل به صورت زیر تعریف میشود:
تعریف 2: اگر پمنپمننقاطی در فضای منسجم هستند آر4 ، 1آر4،1، سپس چند بردار A که از نقاط، خطوط و صفحات درون تشکیل شده است سیل4 ، 1سیل4،1، به صورت بیان می شود
که در آن n تعداد نقاط و {} مجموعه عناصر هندسی با ابعاد یکسان را نشان می دهد. تعریف چند برداری نشان می دهد که عناصر هندسی در ابعاد مختلف با جمع به هم متصل می شوند.
طبق تعریف 2، ادغام و یکسان سازی ابعاد هندسی مختلف از طریق ساختار چند برداری در CGA قابل تحقق است. اشیاء ساده مانند نقاط، خطوط و سطوح را می توان در یک چند برداری برای بیان اجسام هندسی سه بعدی پیچیده ادغام کرد. عناصر با ابعاد مختلف در ساختار چند برداری مستقل هستند. با ساختار چند برداری، بیان همجوشی چند بعدی برای اجسام هندسی پیچیده سه بعدی قابل تحقق است و روابط توپولوژیکی بین عناصر ساختاری بعدی به طور مشخص توسط سلسله مراتب توپولوژیکی که از اجزای چند بعدی ساخته شده است، بیان می شود.
3.2. مدل داده های شی کاداستر سه بعدی بر اساس CGA
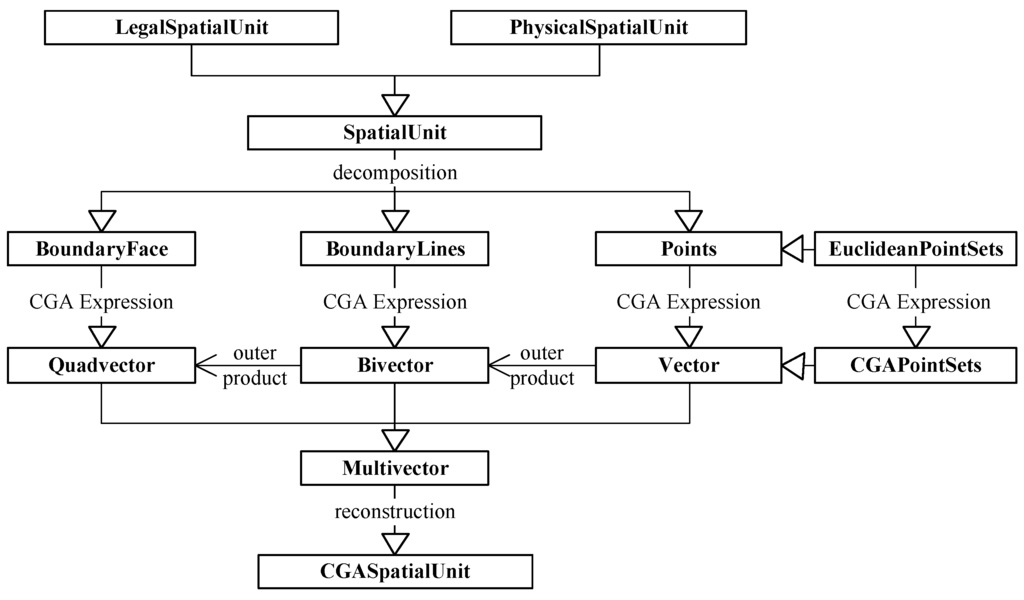
این بخش شرح مفصلی از روش بیان اشیاء کاداستر سه بعدی در CGA را معرفی می کند. اول، رابطه بین محتوای اصلی تحقیق و مدل حوزه مدیریت زمین (LADM) [ 45] مورد بحث قرار می گیرد. دوم، مفهوم و محدوده یک واحد فضایی کاداستر سه بعدی به عنوان معناشناسی تعریف می شود. سوم، روشی برای تحقق یک بیان چند بعدی یکپارچه از هندسه و توپولوژی برای اشیاء کاداستر سه بعدی، که بر اساس CGA است، معرفی شده است. ما یک واحد فضایی کاداستر سه بعدی را از انتزاع سطوح قانونی و فیزیکی اشیاء کاداستر سه بعدی به دست آوردیم. واحد فضایی کاداستر سه بعدی برای به دست آوردن یک سری سیمپلکس های هندسی تجزیه می شود که می توانند با تیغه های ابعادی مختلف در CGA نشان داده شوند. برای دستیابی به بیان چند بعدی برای واحد فضایی کاداستر سه بعدی پیچیده، از چند برداری که یک ساختار ریاضی فضایی در CGA است، استفاده شده است. مدل داده های کاداستر سه بعدی که بر اساس CGA است، در شکل 3 نشان داده شده است. در نهایت، ساختار سازمان ذخیره سازی داده های واحد فضایی کاداستر سه بعدی در CGA طراحی شده است.
3.2.1. شرایط اولیه
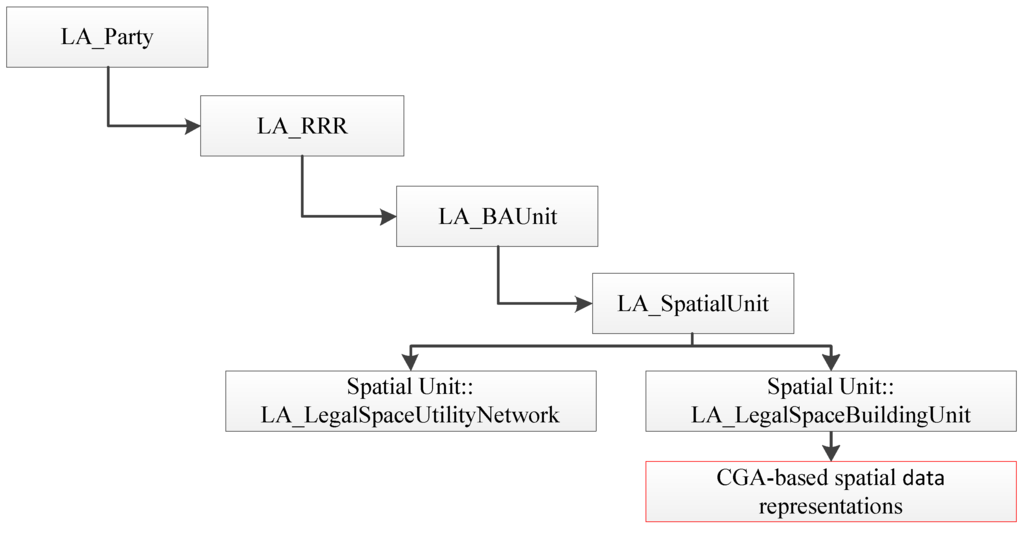
مدل دامنه اداره زمین (LADM)، که شامل یک کاداستر سه بعدی است، یک مدل مفهومی برای مدیریت کاداستر است [ 46 ]. LADM گواهینامه سازمان بین المللی استاندارد (ISO) را دریافت کرده است. همانطور که در شکل 4 نشان داده شده است LADM شامل چهار قسمت است: یک مهمانی (LA_Party); حقوق، محدودیت ها، مسئولیت ها (LA_RRR)؛ یک واحد اداری پایه (LA_BAUnit)؛ و یک واحد فضایی (LA_SpatialUnit). محتوای اصلی تحقیق این مقاله مربوط به واحد فضایی در LADM است. اساساً مبتنی بر نظریه CGA برای بررسی سازماندهی داده ها و رابطه بین هندسه و توپولوژی است که در بیان واحدهای فضایی سه بعدی یکپارچه شده است. ساخت یک مدل داده کاداستر سه بعدی که مبتنی بر CGA است، توسعه واحدهای فضایی در LADM است. رابطه بین مدل داده مبتنی بر CGA و LADM در شکل 4 نشان داده شده است .
قبل از ساخت یک مدل داده کاداستر سه بعدی، توصیف مفهوم یک واحد اساسی در کاداستر سه بعدی – واحد فضایی کاداستر سه بعدی – مورد نیاز است. یک واحد فضایی کاداستر سه بعدی یک شی ترکیبی است که از یک شی قانونی و یک شی فیزیکی سه بعدی در دنیای واقعی انتزاع می شود. این کوچکترین واحد در مدیریت کاداستر سه بعدی است. از منظر قانونی، یک واحد فضایی کاداستر سه بعدی یک فضای سه بعدی بسته با مرزهای سه بعدی متمایز و الزام آور قانونی است. تفاوت بین حقوق مالکیت، معیار اصلی برای تشخیص مرز یک واحد فضایی کاداستر است. سازگاری داخلی حقوق مالکیت، فرض مدیریت کاداستر سه بعدی است. از دیدگاه اشیاء فیزیکی واقعی، واحدهای فضایی کاداستر سه بعدی بیان انتزاعی یک شی مدیریت کاداستر سه بعدی واقعی را با توجه به نیازهای مدیریت کاداستر تشکیل می دهند. واحدهای فضایی سهبعدی اشیاء فیزیکی میتوانند یک ساختمان مستقل باشند که بر روی زمین، زیر یا بالای زمین قرار دارند. همچنین می تواند یک ساختمان نیمه محصور (به عنوان مثال، یک استادیوم ورزشی) باشد که برای به دست آوردن مرز مالکیت سه بعدی طبق قوانین نسبی کاداستر باید انتزاع شود. واحدهای فضایی سه بعدی ممکن است به طور همزمان شامل بسیاری از ساختمان ها با مالکیت یکسان باشند، مانند یک واحد فضایی کارخانه که شامل چندین کارگاه یا یک ویلا حاوی خانه ها، حیاط ها و یک گاراژ زیرزمینی است. یک استادیوم ورزشی) که برای به دست آوردن مرز مالکیت سه بعدی طبق قوانین کاداستر نسبی باید انتزاع شود. واحدهای فضایی سه بعدی ممکن است به طور همزمان شامل بسیاری از ساختمان ها با مالکیت یکسان باشند، مانند یک واحد فضایی کارخانه که شامل چندین کارگاه یا یک ویلا حاوی خانه ها، حیاط ها و یک گاراژ زیرزمینی است. یک استادیوم ورزشی) که برای به دست آوردن مرز مالکیت سه بعدی طبق قوانین کاداستر نسبی باید انتزاع شود. واحدهای فضایی سه بعدی ممکن است به طور همزمان شامل بسیاری از ساختمان ها با مالکیت یکسان باشند، مانند یک واحد فضایی کارخانه که شامل چندین کارگاه یا یک ویلا حاوی خانه ها، حیاط ها و یک گاراژ زیرزمینی است.
3.2.2. بازسازی اشیاء کاداستر سه بعدی در CGA
فرض یک مدل داده کاداستر سه بعدی بیان انتزاعی موجودیت های کاداستر سه بعدی در دنیای واقعی است. تجزیه هندسی اشیاء کاداستر سه بعدی پیچیده برای سازماندهی و ذخیره این اشیاء در پایگاه داده کاداستر مورد نیاز است. نمایش یک مدل داده کاداستر سه بعدی فعلی و الزامات کاداستر برای مالکیت مرزی متمایز هر دو در تجزیه شی کاداستر سه بعدی در نظر گرفته می شوند. در این مقاله، اشیاء کاداستر سه بعدی را می توان به چهار شی هندسی به شرح زیر تجزیه کرد: نقاط، خطوط، سطوح و واحدهای فضایی. با تجزیه بیشتر این اشیاء هندسی، ما سه نوع اولیه هندسی اولیه را به دست می آوریم: گره ها، خطوط مرزی، و وجه های مرزی.
اشیاء پیچیده کاداستر سه بعدی با این ابعاد اولیه اولیه متفاوت نشان داده می شوند، که باید در CGA بیان شوند تا یک فرم بازنمایی ثابت را تحقق بخشند. سیمپلکسهای هندسی پایه ابعادی مختلف در CGA را میتوان مستقیماً با حاصلضرب بیرونی مجموعههای نقطهای همشکل، که در جدول 1 نشان داده شده است، ساخت . با این حال، این سیمپلکس ها در جدول 1محدودیت های مرزی ندارند که در ثبت و مدیریت کاداستر بسیار مهم است. برای توصیف دقیق مرزهای اشیاء کاداستری سه بعدی، محدودیتهای مرزی برای این سادهسازیهای اساسی، که با مجموعههای نقاط همشکل بیان میشوند، مورد نیاز است. مختصات این مجموعه نقاط را می توان برای محدود کردن مرزهای اجسام هندسی متناظر به کار برد که به صورت زیر تعریف می شود:
تعریف 3: اگر G e o Pr iمتر⟨ k ⟩جیه�پ�منمتر〈ک〉یک اولیه هندسی اولیه از زیر فضای k بعدی است سیل4 ، 1سیل4،1و {پمن}{پمن}نشان دهنده مجموعه نقاط منسجمی است که ترکیب می کنند G e o Pr iمتر⟨ k ⟩جیه�پ�منمتر〈ک〉، سپس نمایش هندسی از G e o Pr iمتر⟨ k ⟩جیه�پ�منمتر〈ک〉محصول بیرونی را می توان به صورت زیر تعریف کرد:
که در آن n تعداد نقاط تشکیل دهنده است G e o Pr iمتر⟨ k ⟩جیه�پ�منمتر〈ک〉.
یک وجه اولیه را در نظر بگیرید که از پنج نقطه تشکیل شده است، همانطور که در شکل 5 نشان داده شده است . صفحه ای که شامل وجه در است سیل4 ، 1سیل4،1را می توان توسط پ1^پ2^پ3^ه∞پ1^پ2^پ3^ه∞، در حالی که مرز وجه توسط پنج نقطه ترکیب محدود می شود. شکل 5 و تعریف G e o Pr iمتر⟨ k ⟩جیه�پ�منمتر〈ک〉نشان میدهد که سیمپلکسهای هندسی پایه مستقیماً با حاصلضرب بیرونی مجموعههای نقطهای منسجم نشان داده میشوند. محدوده هندسی این سیمپلکسها توسط دنباله مجموعههای نقطهای که سیمپلکسهای مرزی مربوطه را تشکیل میدهند، محدود میشود. به این ترتیب، ما به نمایش دقیق و متحد برای سیمپلکسهای ابعادی مختلف در CGA پی میبریم. اجسام هندسی پیچیده در CGA را می توان با ادغام سیمپلکس های ابعادی مختلف بیان کرد. برای تحقق بیان اشیاء پیچیده کاداستر سه بعدی به عنوان یک موجودیت، ساختار ریاضی یک چند برداری در CGA برای تحقق بیان یکپارچه سادههای چند بعدی استفاده میشود که به شرح زیر تعریف میشود:
تعریف 4: اگر G e o Pa r c e lجیه�پآ�جهلیک واحد فضایی سه بعدی کاداستر دلخواه در CGA است سیل4 ، 1سیل4،1، هندسه و توپولوژی این شی کاداستر سه بعدی را می توان با فرمول جبری زیر در CGA بیان کرد.
جایی که { G e o Pr iمتر⟨ 1 ⟩} ، { G e o P r iمتر⟨ 3 ⟩} ، { G e o P r iمتر⟨ 4 ⟩}{جیه�پ�منمتر〈1〉}، {جیه�پ�منمتر〈3〉}، {جیه�پ�منمتر〈4〉}مجموعه های سیمپلکس هستند که ترکیب می کنند G e o Pa r c e lجیه�پآ�جهل.
لازم به ذکر است که G e o Pr iمتر⟨ 0 ⟩جیه�پ�منمتر〈0〉، G e o Pr iمتر⟨ 2 ⟩جیه�پ�منمتر〈2〉و G e o Pr iمتر⟨ 5 ⟩جیه�پ�منمتر〈5〉در نمایش های فضایی کاداستر استفاده نمی شود. مانند G e o Pr iمتر⟨ 0 ⟩جیه�پ�منمتر〈0〉نشان دهنده اسکالر است، در بازنمایی های فضایی کاداستر بی فایده است. ویژگی های G e o Pr iمتر⟨ 2 ⟩جیه�پ�منمتر〈2〉نمی تواند به طور دقیق یک مرز کاداستر را بیان کند زیرا می تواند توسط یک قوس یا یک قطعه نمایش داده شود. در مدیریت کاداستر، G e o Pr iمتر⟨ 5 ⟩جیه�پ�منمتر〈5〉برای بیان مستقیم هیچ واحد کاداستری استفاده نمی شود. در عوض، عناصر با ابعاد پایین تر برای تعریف دقیق مرز کاداستر استفاده می شود.
با توجه به تعریف فرمول نمایش جبری برای یک واحد فضایی کاداستر سه بعدی، واحد فضایی کاداستر سه بعدی یک ساختار یکپارچه چند بعدی است. تمام اجزای واحد فضایی کاداستر سه بعدی، مانند نقاط، خطوط مرزی و وجه های مرزی، در ساختار چند برداری یکپارچه شده اند. اطلاعات هندسی در مورد شی کاداستر سه بعدی با ادغام تمام اجزای بعدی مختلف که آن را تشکیل می دهند نشان داده می شود. ساختار توپولوژیکی شی کاداستر سه بعدی با ساختار ساختاری ابعادی موجود در ساختار چند برداری بیان می شود. این شیوه بیان همجوشی چند بعدی اجسام هندسی با ابعاد مختلف بیان چند بعدی یکپارچه را برای هندسه و توپولوژی یک واحد فضایی کاداستر سه بعدی تحقق می بخشد.
فرآیند ساخت یک مدل داده کاداستر سه بعدی که مبتنی بر CGA است، یک رابطه سلسله مراتبی توپولوژیکی متمایز را بین اشیاء هندسه ابعادی مختلف منعکس میکند. یک مکعب برای نشان دادن یک واحد فضایی کاداستر سه بعدی انتخاب شده است که در شکل 6 نشان داده شده است.. روند ساخت بیان یکپارچه چند بعدی برای شی کاداستر سه بعدی توضیح داده شده است. شی کاداستر سه بعدی که با ساختار چند برداری نشان داده می شود، ساختار پیچیده ای است که از نقاط، خطوط مرزی و وجوه مرزی تشکیل شده است. تمام مولفه هایی که در چند برداری قرار دارند مستقل هستند. روابط توپولوژیکی بین اجزای ابعادی مختلف در فرآیند ساختهای مختلف ابعادی، هندسی و سیمپلکس توسط محصول بیرونی به دست میآید. واحد فضایی کاداستر سه بعدی در بالای ساختار سلسله مراتبی قرار دارد.
3.3. سازمان دهی کاداستر سه بعدی بر اساس CGA در یک پایگاه داده
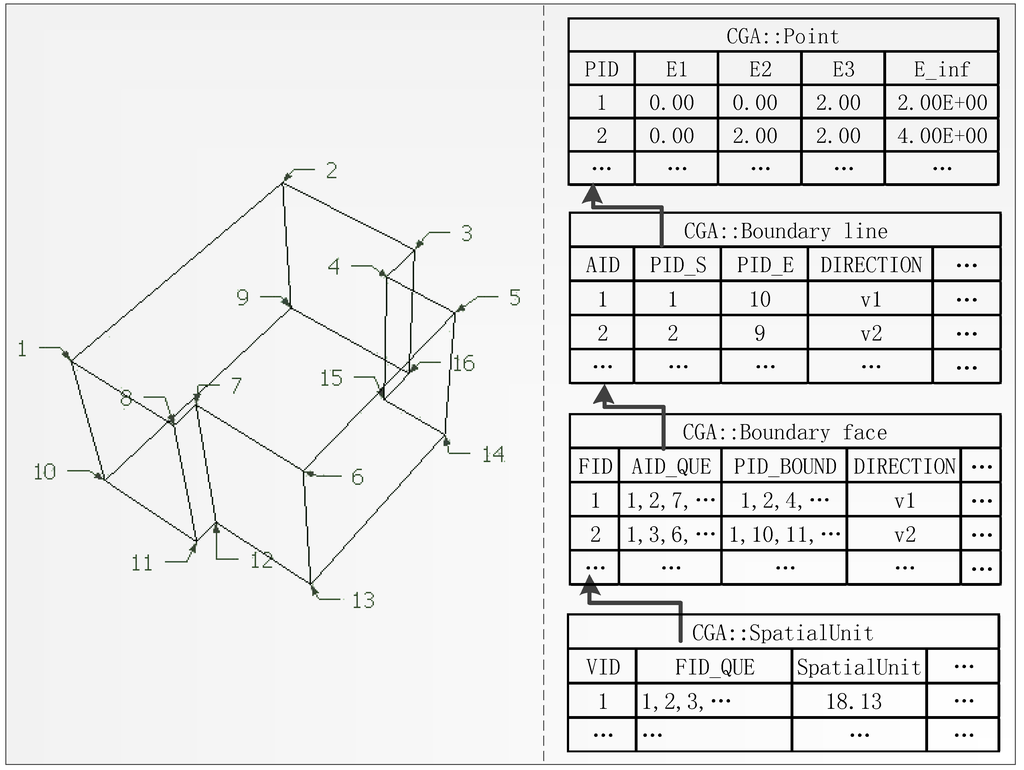
ساختار داده کاداستر سه بعدی بر اساس CGA در یک پایگاه داده کاداستر سازماندهی شده است، همانطور که در شکل 7 نشان داده شده است . ذخیره سازی داده ها شامل چهار نوع داده شامل نقاط، خطوط مرزی، وجه های مرزی و واحدهای فضایی است. مجموعه نقاط منسجم که واحد فضایی کاداستر سه بعدی سمت چپ را در شکل 7 تشکیل می دهند را می توان از مجموعه نقاط اقلیدسی با جاسازی در CGA به دست آورد. از آنجا که فضای منسجم شامل پنج بردار پایه است، مختصات x، y و z نقطه اصلی به ضرایب بردار پایه تبدیل می شوند. ه1،ه2،ه3ه1،ه2،ه3، به ترتیب. زیرا معمولاً ضریب ه0ه0ثابت 1 است، در جدول نقطه و ضریب ذخیره نمی شود ه∞ه∞می توان با مختصات اقلیدسی x، y و z محاسبه کرد [ 41]. از آنجایی که اشیاء هندسی ابعادی مختلف را میتوان از مجموعههای نقاط همشکل توسط محصول بیرونی ساخت، فقط مختصات اصلی در جدول نقطه ذخیره میشوند. خط مرزی و جداول وجه مرزی شناسههای نقطهای را ذخیره میکنند که در ارتباط با جدول نقطه استفاده میشوند. شناسه های نقطه نسبی هم در جدول خط مرزی و هم در جدول چهره مرزی به ترتیب مشخص ذخیره می شوند تا محدوده اشیاء مربوطه را تعریف کنند. برای اطمینان از سازگاری با روش موجود که در آن خطوط وجهها را تشکیل میدهند، شناسههای خط مرزی که چهرههای مرزی را تشکیل میدهند نیز در جدول چهره مرزی مربوطه ذخیره میشوند. اطلاعات جهت در مورد خطوط مرزی و وجه های مرزی در هر جدول به صورت برداری ذخیره می شود. واحد فضایی کاداستر سه بعدی با ذخیره شناسه های چهره مرزی تشکیل دهنده سازماندهی شده است.
ویژگی های سازمان دهی کاداستر سه بعدی و روش همبستگی مشابه ویژگی های ساختار چند برداری است که نه تنها یک ساختار ریاضی بلکه یک ساختار ذخیره سازی داده ها نیز می باشد. بر اساس طراحی ساختارهای ذخیرهسازی دادههای نقطه، خط مرزی، چهره مرزی و واحد فضایی، نقاط و خطوط همشکل در جدول چهره مرزی ذخیره میشوند. چهره های مرزی، که برای ساختن واحد فضایی کاداستر سه بعدی به کار می روند، می توانند با محصولات بیرونی با مجموعه نقطه های منسجم، همانطور که در تعریف 3 نشان داده شده است، یا با شناسه خط مرزی که به وجه مرزی تعلق دارد، نشان داده شوند. مشابه ساختار چند برداری که اجسام ابعادی مختلف را ادغام می کند، جدول چهره مرزی نیز شامل تمام اولیه هایی است که برای ترکیب جدول به کار می روند. این ویژگیها همچنین در جدول واحد فضایی، که شناسههای چهره مرزی را برای تحقق ذخیرهسازی اشیاء چند بعدی ذخیره میکند، فهرست شدهاند. در این شیوه سازماندهی داده ها، واحد فضایی کاداستر پیچیده سه بعدی را می توان به راحتی بیان و در ساختار چند برداری ذخیره کرد. روابط توپولوژیکی بین اشیاء ساخته شده با ابعاد مختلف را می توان به وضوح در ذخیره سازی داده سلسله مراتبی و ساختار چند برداری توصیف کرد، در حالی که اطلاعات هندسی را می توان در داخل چند برداری توسط محصول بیرونی نشان داد. هندسه و توپولوژی اشیاء کاداستری سه بعدی را می توان به شکل یکپارچه چند بعدی بیان کرد که در ساختار چند برداری ادغام شده است. واحد فضایی کاداستر سه بعدی پیچیده را می توان به راحتی بیان و در ساختار چند برداری ذخیره کرد. روابط توپولوژیکی بین اشیاء ساخته شده با ابعاد مختلف را می توان به وضوح در ذخیره سازی داده سلسله مراتبی و ساختار چند برداری توصیف کرد، در حالی که اطلاعات هندسی را می توان در داخل چند برداری توسط محصول بیرونی نشان داد. هندسه و توپولوژی اشیاء کاداستری سه بعدی را می توان به شکل یکپارچه چند بعدی بیان کرد که در ساختار چند برداری ادغام شده است. واحد فضایی کاداستر سه بعدی پیچیده را می توان به راحتی بیان و در ساختار چند برداری ذخیره کرد. روابط توپولوژیکی بین اشیاء ساخته شده با ابعاد مختلف را می توان به وضوح در ذخیره سازی داده سلسله مراتبی و ساختار چند برداری توصیف کرد، در حالی که اطلاعات هندسی را می توان در داخل چند برداری توسط محصول بیرونی نشان داد. هندسه و توپولوژی اشیاء کاداستری سه بعدی را می توان به شکل یکپارچه چند بعدی بیان کرد که در ساختار چند برداری ادغام شده است. در حالی که اطلاعات هندسی را می توان در چند برداری با ضرب بیرونی نشان داد. هندسه و توپولوژی اشیاء کاداستری سه بعدی را می توان به شکل یکپارچه چند بعدی بیان کرد که در ساختار چند برداری ادغام شده است. در حالی که اطلاعات هندسی را می توان در چند برداری با ضرب بیرونی نشان داد. هندسه و توپولوژی اشیاء کاداستری سه بعدی را می توان به شکل یکپارچه چند بعدی بیان کرد که در ساختار چند برداری ادغام شده است.
4. مطالعات موردی
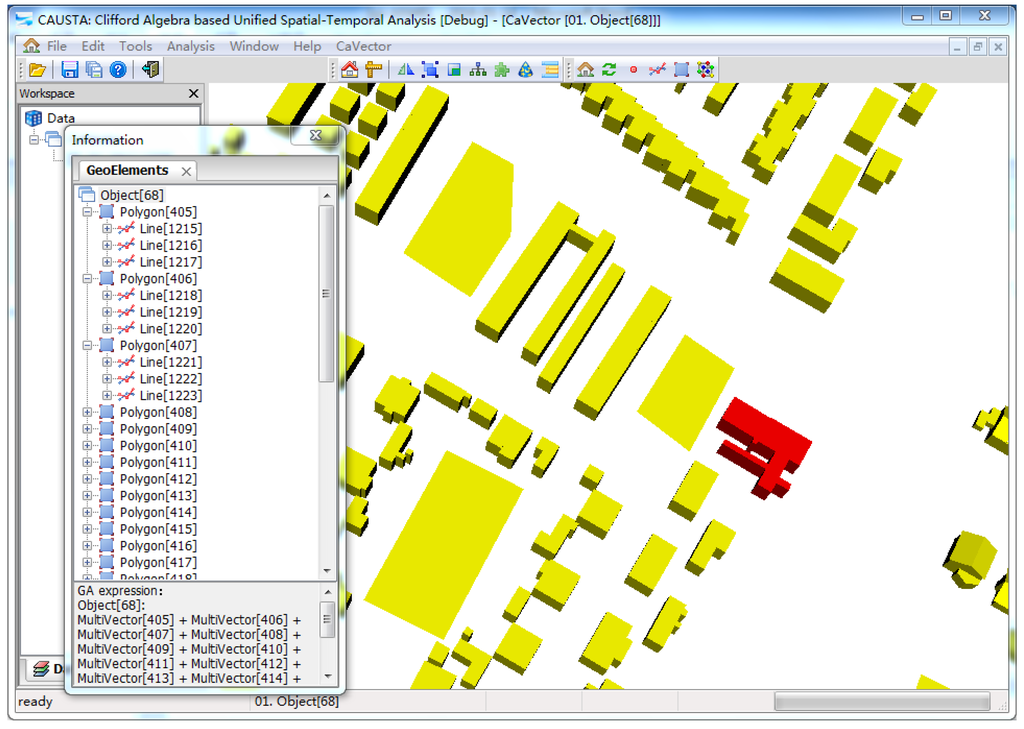
داده های کاداستر برای یک جامعه مسکونی شهری در Xuzhou، استان جیانگ سو، به عنوان داده های تجربی در مطالعه موردی ما انتخاب شده است. داده های تجربی شامل 17618 نقطه، 28487 خط مرزی، 9462 وجه مرزی و 1484 ساختمان است. این مدل های ساختمانی به سیستم نرم افزاری CAUSTA وارد می شوند [ 32]. مدل داده به عنوان یک پلاگین از سیستم CAUSTA پیاده سازی شده است. برای اطمینان از سازگاری با عملیات مبتنی بر GA، دادههای تجربی در قالبهای داده CaVector برای ساختار ذخیرهسازی سازماندهی مجدد میشوند. ساختار ذخیره سازی متعاقباً مطابق ساختار چند برداری مونتاژ می شود. با این تحولات و سازماندهی ها می توانیم واحدهای فضایی کاداستر سه بعدی در CAUSTA را مدیریت کنیم. نمایش ها در محیط سخت افزاری یک نوت بوک Lenovo E420 با پردازنده مرکزی Intel Core i5-2430M با فرکانس 2.4 گیگاهرتز و 4 گیگابایت رم انجام می شود. محیط نرم افزار یک سیستم عامل ویندوز 7 با ویژوال استودیو 2008 است.
مدلهای دادههای کاداستر سهبعدی مرسوم، که مبتنی بر یک مدل فضایی ساده شده (SSM) [ 18 ] و یک مدل شیگرا سهبعدی GIS (OO3D) [ 46 ] هستند، برای مقایسه با عملکرد یک مبتنی بر CGA انتخاب شدهاند. مدل داده های کاداستر نتایج مربوط به حافظه مورد نیاز و زمان پاسخ در تجسم سه بعدی برای مدل های داده مبتنی بر SSM، OO3D و CGA در جدول 2 فهرست شده است . نتایج مقایسه نشان میدهد که مدل داده مبتنی بر CGA کارآمدتر از مدل داده SSM در رابطه با زمان پاسخ و اشغال حافظه عمل میکند. اگرچه ذخیره سازی داده در مدل داده مبتنی بر CGA نسبت به مدل داده OO3D حافظه کمتری را اشغال می کند، اما زمان پاسخگویی کمی بیشتر از مدل داده OO3D دارد.
نمایش هندسی و جبری واحدهای فضایی سه بعدی در مدل داده های کاداستر سه بعدی مبتنی بر CGA در شکل 8 نشان داده شده است . بازنمایی و سازماندهی واحدهای فضایی با بازنمایی در فضای اقلیدسی متفاوت است. در نمایش CGA، ساختارهای ابعادی اشیا بر اساس ساختار سلسله مراتبی گراسمن نمایش داده می شوند. شکل 8 معادلات جبری برای هر واحد فضایی را نشان می دهد که توسط حاصلضرب بیرونی ساخته شده است. اجسام هندسی ابعادی مختلف، مانند خطوط و سطوح نشان داده شده در شکل 8، می تواند به طور یکنواخت با محصول بیرونی در CGA بیان شود. در فضای اقلیدسی، نمایش اجسام هندسی در درجه اول بر اساس مختصات است که باعث مشکلاتی مانند ساختار بیان پیچیده، شکل بیان غیر یکنواخت در ابعاد مختلف و معنای هندسه نامشخص می شود [47 ] . اجسام هندسی در CGA بیان میشوند و محصول بیرونی با روشهای سنتی که بر اساس هندسه اقلیدسی است، متفاوت است. اشیاء هندسی که با محصول بیرونی نشان داده می شوند نه تنها از بیان یکنواخت در بین ابعاد مختلف پشتیبانی می کنند، بلکه ساختار ساده تر و معانی هندسی واضح تری را برای بیان شیء هندسی ابعاد مختلف پیشنهاد می کنند. همانطور که در شکل 9 نشان داده شده است، می توان از این مزایا برای نمایش اجسام هندسی سه بعدی پیچیده استفاده کرد.
با فرم بیان یکپارچه برای اشیاء هندسی با ابعاد مختلف، اطلاعات هندسی و روابط توپولوژیکی اشیاء پیچیده کاداستر را می توان در ساختار چند برداری در CGA نشان داد. یکی از اشیاء کاداستر سه بعدی برای نشان دادن نحوه نمایش اشیاء پیچیده کاداستر با ساختار چند برداری انتخاب شد، همانطور که در شکل 9 نشان داده شده است.. در مقایسه با بیان جداگانه اجسام هندسی ابعادی مختلف در فضای اقلیدسی، همه عناصر بعدی که اشیاء کاداستر سه بعدی را تشکیل میدهند، چند بعدی و در ساختار چند برداری یکپارچه هستند. اطلاعات هندسی در مورد اشیاء کاداستر با یک فرمول جبری با اجزای بعدی ترکیبی بیان می شود و روابط توپولوژیکی بین اجزای بعدی مختلف را می توان در سلسله مراتب ابعادی متمایز نشان داد. اطلاعات هندسی و روابط توپولوژیکی یک شی کاداستر را می توان در ساختار چند بردار چند بعدی به صورت یکپارچه بیان کرد، که روش ما را از رویکردهای موجود مبتنی بر هندسه اقلیدسی متمایز می کند.30 ، 34 ].
در مقایسه با مدلهای دادههای کاداستر سهبعدی موجود که مبتنی بر هندسه اقلیدسی هستند، مدل دادهای که مبتنی بر CGA است، یک بیان یکپارچه هندسی و توپولوژیکی چند بعدی را برای اشیاء کاداستر سهبعدی تحقق میبخشد. یک مدل داده کاداستر سه بعدی که بر اساس CGA است، یک روش فشرده و از نظر هندسی متمایز برای نمایش اشیاء کاداستر در یک پایگاه داده کاداستر ارائه می دهد. عناصر ساختاری چند بعدی در یک ساختار چند برداری برای بیان اشیاء کاداستر سه بعدی ادغام می شوند، که واحد فضایی را قادر می سازد تا به عنوان یک موجودیت در تحلیل توپولوژیکی و فضایی استفاده شود [ 31 , 32 , 34]. با مزیت محصول بیرونی در نمایش اجسام ابعادی، اشیاء کاداستر را می توان مستقیم و به سادگی بیان کرد. تمام اجزای ابعادی اشیاء کاداستر سه بعدی را می توان در یک ساختار چند برداری بیان کرد. علاوه بر این، یک ساختار چند برداری می تواند برای بیان اشیاء کاداستر استفاده شود و یک فرم ذخیره سازی داده سلسله مراتبی را ارائه می دهد که در سازماندهی داده های کاداستر سه بعدی در یک پایگاه داده مفید است.
5. بحث
در این مقاله، ما تئوری CGA را به مدلسازی دادههای کاداستر سهبعدی برای حل مسائل مربوط به نمایشهای فضایی که در گسترش از کاداستر دوبعدی به کاداستر سهبعدی با آن مواجه میشوند، معرفی میکنیم. با مزایای CGA در نمایش هندسی، فرم های بیان برای هر دو واحد فضایی 2 بعدی و 3 بعدی به روش جبری متحد شده اند. اطلاعات هندسی و روابط توپولوژیکی واحدهای فضایی نیز در عبارات جبری ادغام شده است. در CGA، اشیاء ابعادی مختلف به طور یکنواخت با استفاده از محصولات بیرونی نمایش داده میشوند که امکان گسترش مستقیم و شهودی بازنماییهای فضایی از ساختارهای دو بعدی به ساختارهای سه بعدی را فراهم میکند. ساختار چند برداری متعاقباً برای ادغام جبری اجزای هندسی چند بعدی برای واحدهای فضایی سه بعدی پیچیده به عنوان موجودیت ها استفاده می شود. هندسه ها و روابط توپولوژیکی واحدهای فضایی به صورت یکپارچه در قالب عبارات جبری نمایش داده می شوند. با توسعه یک مدل داده های کاداستر سه بعدی مبتنی بر CGA، نمایش واحدهای فضایی در پایگاه داده کاداستر سه بعدی نه تنها معانی هندسی متمایز دارند بلکه نمایش هندسه ها و روابط توپولوژیکی را نیز ترکیب می کنند. مدل داده های کاداستر سه بعدی مبتنی بر CGA نیز نمایش اشیاء چند بعدی را در همان شکل نمایش یکسان می کند. بنابراین، نمایش مستقیم، فشرده و یکپارچه از اشیاء امکان پذیر است. نمایش واحدهای فضایی در پایگاه داده کاداستر سه بعدی نه تنها دارای معانی هندسی متمایزی است بلکه نمایش هندسه ها و روابط توپولوژیکی را نیز ترکیب می کند. مدل داده های کاداستر سه بعدی مبتنی بر CGA نیز نمایش اشیاء چند بعدی را در همان شکل نمایش یکسان می کند. بنابراین، نمایش مستقیم، فشرده و یکپارچه از اشیاء امکان پذیر است. نمایش واحدهای فضایی در پایگاه داده کاداستر سه بعدی نه تنها دارای معانی هندسی متمایزی است بلکه نمایش هندسه ها و روابط توپولوژیکی را نیز ترکیب می کند. مدل داده های کاداستر سه بعدی مبتنی بر CGA نیز نمایش اشیاء چند بعدی را در همان شکل نمایش یکسان می کند. بنابراین، نمایش مستقیم، فشرده و یکپارچه از اشیاء امکان پذیر است.
در این مقاله، ما در درجه اول بر یک فرم بیان یکپارچه بین واحدهای فضایی دوبعدی و واحدهای فضایی سه بعدی و ادغام هندسه و توپولوژی برای واحدهای فضایی تمرکز میکنیم. با این حال، دادههای ثبت کاداستر و معاملات ممکن است روزانه بهروزرسانی شوند، که نشان میدهد مؤلفه زمانی دادههای کاداستر باید در توسعه کاداستر سهبعدی در نظر گرفته شود. روشی برای ساخت یک مدل دادههای کاداستر مکانی – زمانی موضوع تحقیقات آینده خواهد بود. به روز رسانی یکپارچه هر دو هندسه و روابط توپولوژیکی پیچیده است. اگرچه توانایی محاسباتی CGA بسیار قدرتمند است، اما ما در مورد تجزیه و تحلیل فضایی و بهروزرسانی اشیاء کاداستر سه بعدی با استفاده از عملگرها یا الگوریتمهای GA صحبت نکردیم. مثلا،31 ] زیرا ساختار هندسی در CGA بدون مختصات است، به عنوان مثال ، هندسه ها را می توان با توجه به ساختارهای ساخت نسبی که به ساختارهای ابعادی و روابط توپولوژیکی مرتبط هستند، به طور تطبیقی اصلاح کرد. استفاده کامل از این مزایا در CGA برای توسعه یک روش به روز رسانی داده یکپارچه که هم هندسه ها و هم روابط توپولوژیکی را در چارچوب یکپارچه به روز می کند، نیز یکی از اهداف مهم مطالعات آینده است. محاسبات روابط توپولوژیکی به طور بالقوه کامل تر از مدل کلاسیک 9IM برای مثلث های سه بعدی با استفاده از مدل CGA [ 35] است.]. از آنجایی که مدل کاداستر سه بعدی پایه و اساس نمایش داده ها است، ساخت تحلیل با استفاده از عملگرهای CGA ساده و مستقیم است. این موضوع جهت بالقوه دیگری برای توسعه کاداستر سه بعدی مبتنی بر CGA است.
6. نتیجه گیری
در این مقاله، ما یک مدل داده کاداستر سه بعدی مبتنی بر CGA را برای حل مسائلی مانند تقسیم در فرمهای نمایش فضایی از یک کاداستر دو بعدی به یک کاداستر سه بعدی معرفی کردیم. در این مدل داده، ساختارهای هندسی توسط محصول بیرونی مطابق با ساختار گراسمن تولید میشوند. اشیاء ابعادی مختلف با ساختار داده چند برداری با استفاده از یک فرم یکپارچه نشان داده می شوند. به این ترتیب، روابط توپولوژیکی بین اشیاء ابعادی مختلف را می توان به طور ضمنی در نمایش شی به ارث برد. مدل داده با داده های دنیای واقعی آزمایش شد. ویژگی های مدل داده نیز مورد بحث قرار می گیرد. این آزمون نشان میدهد که مدل دادههای ما میتواند نه تنها نمایش اجسام ابعادی مختلف، بلکه نمایش ساختارهای هندسی و روابط توپولوژیکی را نیز متحد کند. نگهداری و به روز رسانی داده ها در این مدل داده بسیار فشرده تر و ساده تر می شود. از آنجایی که مدل داده ما کاملاً سازگار است و می تواند از اپراتورها و تجزیه و تحلیل GA پشتیبانی کند، تجزیه و تحلیل داده های کاداستر سه بعدی چند بعدی امکان پذیر است.






بدون نظر