

خلاصه
سطوح مختلف جزئیات (LOD) یک مدل شهر سه بعدی اغلب به طور مستقل، بدون پیوند بین نمایشهای یک شی ذخیره میشوند، که باعث ناهماهنگی، و همچنین مشکلات بهروزرسانی و نگهداری میشود. یک راه حل برای این مشکل، مدل سازی LOD به عنوان یک بعد هندسی اضافی عمود بر سه بعد فضایی است که در نتیجه یک مدل 4 بعدی واقعی است که در آن یک شی 4 بعدی منفرد (یک چند وجهی) یک شی چند وجهی سه بعدی (مثلاً یک ساختمان) را نشان می دهد. همه LOD های آن و یک مدل شهر سه بعدی چندگانه LOD به عنوان یک مجموعه سلولی 4 بعدی مدل شده است. در حالی که چنین رویکردی قبلاً در سطح مفهومی مورد بحث قرار گرفته است، هدف ما در این مقاله توصیف این است که چگونه میتوان آن را با پیوند دادن مدلهای سه بعدی موجود از یک شیء در LODهای مختلف، تحقق بخشید. ما ابتدا روش کلی خود را برای ساخت چنین مدل 4 بعدی ارائه می کنیم. که شامل سه مرحله است: (1) یافتن سلولهای 0D-3D مربوطه. (2) ایجاد سلول های 1D-4D که آنها را به هم متصل می کند. و (3) ساخت مدل 4 بعدی. به دلیل روابط پیچیده بین اشیاء در LOD های مختلف، ایجاد سلول های اتصال می تواند دشوار شود. بنابراین ما چهار گزینه مختلف را برای انجام این کار توصیف میکنیم، و مزایا و معایب هر کدام را از نظر امکانسنجی در عمل و ویژگیهایی که مدل 4 بعدی حاصل دارد، مورد بحث قرار میدهیم. ما نشان میدهیم که چگونه طرحهای پیوند مختلف در چندین مورد استفاده به اشیایی با ویژگیهای متفاوت منجر میشوند. ما همچنین نشان میدهیم که چگونه روش پیوند ما در عمل با پیادهسازی پیوند سلولهای منطبق برای ساخت یک مدل 4 بعدی کار میکند. (2) ایجاد سلول های 1D-4D که آنها را به هم متصل می کند. و (3) ساخت مدل 4 بعدی. به دلیل روابط پیچیده بین اشیاء در LOD های مختلف، ایجاد سلول های اتصال می تواند دشوار شود. بنابراین ما چهار گزینه مختلف را برای انجام این کار توصیف میکنیم، و مزایا و معایب هر کدام را از نظر امکانسنجی در عمل و ویژگیهایی که مدل 4 بعدی حاصل دارد، مورد بحث قرار میدهیم. ما نشان میدهیم که چگونه طرحهای پیوند مختلف در چندین مورد استفاده به اشیایی با ویژگیهای متفاوت منجر میشوند. ما همچنین نشان میدهیم که چگونه روش پیوند ما در عمل با پیادهسازی پیوند سلولهای منطبق برای ساخت یک مدل 4 بعدی کار میکند. (2) ایجاد سلول های 1D-4D که آنها را به هم متصل می کند. و (3) ساخت مدل 4 بعدی. به دلیل روابط پیچیده بین اشیاء در LOD های مختلف، ایجاد سلول های اتصال می تواند دشوار شود. بنابراین ما چهار گزینه مختلف را برای انجام این کار توصیف میکنیم، و مزایا و معایب هر کدام را از نظر امکانسنجی در عمل و ویژگیهایی که مدل 4 بعدی حاصل دارد، مورد بحث قرار میدهیم. ما نشان میدهیم که چگونه طرحهای پیوند مختلف در چندین مورد استفاده به اشیایی با ویژگیهای متفاوت منجر میشوند. ما همچنین نشان میدهیم که چگونه روش پیوند ما در عمل با پیادهسازی پیوند سلولهای منطبق برای ساخت یک مدل 4 بعدی کار میکند. بنابراین ما چهار گزینه مختلف را برای انجام این کار توصیف میکنیم، و مزایا و معایب هر کدام را از نظر امکانسنجی در عمل و ویژگیهایی که مدل 4 بعدی حاصل دارد، مورد بحث قرار میدهیم. ما نشان میدهیم که چگونه طرحهای پیوند مختلف در چندین مورد استفاده به اشیایی با ویژگیهای متفاوت منجر میشوند. ما همچنین نشان میدهیم که چگونه روش پیوند ما در عمل با پیادهسازی پیوند سلولهای منطبق برای ساخت یک مدل 4 بعدی کار میکند. بنابراین ما چهار گزینه مختلف را برای انجام این کار توصیف میکنیم، و مزایا و معایب هر کدام را از نظر امکانسنجی در عمل و ویژگیهایی که مدل 4 بعدی حاصل دارد، مورد بحث قرار میدهیم. ما نشان میدهیم که چگونه طرحهای پیوند مختلف در چندین مورد استفاده به اشیایی با ویژگیهای متفاوت منجر میشوند. ما همچنین نشان میدهیم که چگونه روش پیوند ما در عمل با پیادهسازی پیوند سلولهای منطبق برای ساخت یک مدل 4 بعدی کار میکند.
کلید واژه ها:
سطح جزئیات (LOD) ؛ 4 بعدی ؛ GIS چند بعدی ; ساختار داده 4 بعدی
1. معرفی
مدلهای سه بعدی شهر با سطح جزئیات (LOD) مشخص میشوند، مفهومی که پیچیدگی و ظرافت آنها را توصیف میکند، که با قابلیت استفاده آنها نیز مرتبط است [ 1 ]. افزایش جزئیات یک مدل، کاربردهای بیشتری را ممکن میسازد، اما به این معنی است که نمایشهای آن اندازههای بزرگتری را اشغال میکنند و پردازش آنها مستلزم هزینههای محاسباتی بالاتری است. به همین دلیل، اغلب مطلوب است که LOD های مختلف برای اشیاء سه بعدی یکسان [ 2 ، 3 ]، مشابه در گرافیک کامپیوتری [ 4 ] وجود داشته باشد. به عنوان مثال، استاندارد بین المللی برای ذخیره سازی و نمایش مدل های سه بعدی شهر، CityGML [ 5 ]، امکان ذخیره مشترک داده ها در چندین LOD [ 6 ] را ارائه می دهد.
با این حال، نمایش های مختلف از یک مجموعه از اشیاء معمولاً به طور جداگانه ذخیره می شوند و یا به هم متصل نیستند یا فقط در سطح شی به هم متصل می شوند (مثلاً از طریق استفاده از شناسه ها). این بدان معنی است که روابط پیچیده بین اشیاء، مانند فروپاشی، تجمع و سایر مواردی که یک به یک نیستند، به سختی ذخیره می شوند، که از جمله باعث بروز مشکلات به روز رسانی و نگهداری و همچنین ناسازگاری می شود [7 ] . همچنین ذخیره سازی اطلاعات معنایی در مورد این روابط را پیچیده می کند. نقشه های توپوگرافی، که در چندین LOD نیز موجود هستند، معمولاً از مشکلات مشابهی رنج می برند [ 8 ]. همانطور که در بخش 2 بیشتر توضیح داده شد، پیوند دادن نمایش ها بر اساس شی به شی رضایت بخش نیست، زیرا روابط پیچیده، مانند اشیایی که در حال جابجایی هستند یا چندین شیء در یک ادغام می شوند، فقط به طور ضمنی توصیف می شوند.
همانطور که در بخش 3 توضیح داده شد، یک رویکرد برای حل مسئله بازنمایی های مستقل چندگانه مدل سازی LOD به عنوان یک بعد هندسی اضافی است که مستقل و عمود بر سه بعد فضایی است. این امکان ذخیره تمام تناظرهای بین اشیاء را در LODهای گسسته با مدلسازی آنها به گونه ای که گویی پیوسته هستند و می تواند برای چندین کاربرد مانند تضمین ثبات یک مدل در سراسر LODها یا به روز رسانی خودکار مجموعه داده ها مورد استفاده قرار گیرد را ممکن می سازد [9 ]]. در مورد مدلی با سه بعد فضایی، این مستلزم ساخت یک مدل هندسی 4 بعدی واقعی است که در آن نمونه های اولیه چند کورا در فضای 4 بعدی، آنالوگ 4 بعدی چند ضلعی های دو بعدی یا چند وجهی سه بعدی، با هر نقطه دارای مختصات 4 بعدی شکل هستند. x ، y، z، لایکس،�،�،ل) جایی که l نقطه ای را در امتداد محور LOD تعریف می کند. سپس یک مدل 4 بعدی واقعی را می توان با استفاده از انواع ساختارهای داده n D [ 10 ] ذخیره کرد، و یک LOD خاص را می توان از مدل 4 بعدی با «برش دادن» آن، به عنوان مثال ، محاسبه تقاطع آن با یک سطح یا حجم معین، به دست آورد. یک نقطه از پیش تعیین شده در امتداد بعد LOD [ 11 ]. توجه داشته باشید که این با استفاده رایج تر از اصطلاح “مدل 4 بعدی” در دنیای GIS مخالف است، که به هر سیستمی اشاره دارد که اطلاعات زمانی را به هر شکلی مدیریت می کند، معمولاً به عنوان یک مهر زمانی ساده که به هر شی 2 بعدی/3 بعدی متصل می شود. .
ما در بخش 4 چهار طرح پیوندی را ارائه میکنیم که میتوانند برای ساخت مدلهای 4 بعدی از مجموعهای از اشیاء سهبعدی مورد استفاده قرار گیرند و مزایا و معایب هر روش را از نظر امکانسنجی در عمل و ویژگیهایی که مدل 4 بعدی خواهد داشت، مورد بحث قرار میدهیم. در بخش 5 ، چندین مورد استفاده را برای نشان دادن اینکه چگونه طرحهای مختلف به اشیایی با ویژگیهای متفاوت منجر میشوند، ارائه میکنیم. بنابراین بهترین طرح به برنامه وابسته است. به عنوان مثال، یک پارادایم ممکن است برای تجسم مفید باشد، در حالی که یکی دیگر ممکن است به عنوان ورودی تحلیل مدلسازی نویز مناسبتر باشد. در بخش 6 ، ما نشان می دهیم که چگونه روش پیوند ما در عمل با پیاده سازی پیوند سلول های منطبق برای ساخت یک مدل 4 بعدی کار می کند. نتیجه می گیریم دربخش 7 با بحث و ایده های ما برای کار آینده.
2. کارهای مرتبط
2.1. سطح جزئیات در مدل سازی سه بعدی شهر
مفهوم کلی سطح جزئیات در مدلسازی سه بعدی شهر توسط Biljecki و همکارانش بررسی شده است. [ 1 ]، که مفهوم LOD را به معیارهای چندگانه (عمدتاً پیوسته) تجزیه می کنند، مانند دانه بندی هندسی، ابعاد، ظاهر و انسجام فضایی- معنایی. مورد دوم با جزئیات بیشتری توسط Stadler و Kolbe [ 12 ] بررسی شده است.
منگ و فوربرگ [ 13 ] و فن و منگ [ 14 ] زنجیره فضای مقیاس ساختمان های سه بعدی را توصیف می کنند و LOD را به عنوان نقطه عطفی در امتداد فضای مقیاس تعریف می کنند. دولنر و بوخهولز [ 15 ] همچنین LOD یک مدل را به عنوان یک بعد مفهومی در نظر می گیرند که امکان تعریف LOD های پیوسته را فراهم می کند. این با کار ما مطابقت دارد، زیرا ما مقیاس را به عنوان یک بعد اضافی ادغام می کنیم، که نیاز به پارامترسازی آن دارد.
مدیریت LOD های متعدد و جابجایی بین آنها یک مشکل موضوعی در گرافیک کامپیوتری است [ 16 ] که بر مدیریت LOD در GIS سه بعدی نیز تأثیر گذاشته است [ 17 ]. LOD های درشت تر معمولاً از LOD های ظریف تر تعمیم داده می شوند تا عملکرد تجسم را بهبود بخشند [ 18 ، 19 ، 20 ، 21 ]
2.2. شناسایی و پیوند اشیاء مربوطه
به منظور پیوستن چندین نمایش جداگانه، ذخیره شده به عنوان مجموعه داده های مستقل، ابتدا لازم است که مطابقت بین اشیاء (معادل) در LOD های مختلف پیدا شود. سپس این اشیاء مستقل را می توان با استفاده از ساختارهای مختلفی که قبلاً در متون علمی شرح داده شده است، پیوند داد، مانند: تقسیم بندی های مسطح سلسله مراتبی [ 22 ]، پارتیشن های چند مقیاسی [ 23 ]، نقشه های تو در تو [ 24 ] و درختان تقسیم بندی منطقه تعمیم یافته توپولوژیکی [22]. 25 ].
سادهترین طرحهای پیوند در چارچوب یک فرآیند تعمیم خودکار [ 26 ] کار میکنند، که در آن نسخههای با جزئیات کمتر ( یعنی تعمیمیافته) یک مدل را میتوان به صورت الگوریتمی ایجاد کرد. در این مورد، تطابق بین اشیاء در LOD های مختلف شناخته شده است و می تواند در طول فرآیند تعمیم پیوند داده شود [ 27 ].
روشهای دیگر تلاش میکنند تا با استفاده از روشهای تطبیق نقشه، این مطابقتها را بیابند، که میتواند هندسه [ 28 ]، توپولوژی و معناشناسی اشیاء و بین آنها را در نظر بگیرد [ 29 ]. دووگل و همکاران [ 29 ] این کار را در سه مرحله انجام می دهد: (1) یافتن دستی مطابقت بین طبقات معنایی. (2) حل تعارضات؛ و (3) تطبیق اشیاء با استفاده از هندسه، توپولوژی و معناشناسی. ژانگ و همکاران [ 8 ] ویژگی ها را با محاسبه ضریب سازگاری، که از شباهت هندسه آنها و همسایگانشان به دست می آید، مطابقت می دهد. بیلجکی و همکاران [ 7] هندسه های یکسان را در چندین LOD از یک شی در یک فایل CityGML شناسایی کرده و از آنها برای به دست آوردن اندازه فایل کوچکتر استفاده مجدد کنید.
2.3. LOD به عنوان یک بعد
دولنر و بوخهولز [ 15 ] مفهوم یک LOD پیوسته را مورد بحث قرار می دهند که می تواند برای مدل سازی LOD های گسسته استفاده شود. اگرچه این به طور مستقیم با LOD به عنوان یک بعد مرتبط نیست، اما LOD را قادر میسازد تا با پارامتر کردن LOD به این روش مدلسازی شود، به طوری که بتوان آن را در یک محور قرار داد.
Van Oosterom و Meijers [ 30 ] در مورد ادغام نقشه های 2 بعدی در LOD های مختلف در یک مدل که از نظر مفهومی 3D (2D + LOD) است، مکعب مقیاس فضا (SSC) بحث می کنند. نواحی چند ضلعی در یک نقشه به صورت سلسله مراتبی از پارتیشن های مسطح دوبعدی در LOD های مختلف ذخیره می شوند که به هم مرتبط هستند. با این حال، از آنجایی که این رویکرد از اشیاء سه بعدی واقعی استفاده نمیکند، تنها عملیاتهایی که در منطق الگوریتمهای آن کدگذاری شدهاند را میتوان پشتیبانی کرد ( به عنوان مثال ، تعمیم خط و ادغام مناطق).
آنها همچنین در مورد تعمیم مفهومی SSC به 4 بعدی بحث می کنند، به عنوان مثال ، که در آن حجم ها به عنوان ورودی استفاده می شود و سطح جزئیات به بعد چهارم تبدیل می شود. با این حال، توصیف آنها فقط تئوری است: هیچ تلاشی برای ساخت یا ذخیره یک مدل 4 بعدی وجود ندارد. علاوه بر این، تنها مورد در نظر گرفته شده این است که دو منشور مستطیلی مجاور تجمیع شده و سپس در مقیاس بالاتر ساده شده اند. ساخت مدل 4 بعدی برای چنین موردی سادهترین حالت از چهار موردی است که در بخش 4 در نظر میگیریم، زیرا هر دو شی ورودی دارای توپولوژی یکسانی هستند و بنابراین یافتن یک مطابقت بین موارد اولیه ساده است.
2.4. ذخیره سازی یک مدل 4 بعدی
چند ساختار داده nD وجود دارد که می توان از آنها برای ذخیره یک مدل 4 بعدی در رایانه استفاده کرد. آرویو اوهوری و همکاران [ 10 ] یک نمای کلی کامل ارائه دهید. ساده ترین آنها شامل پسوندهای شطرنجی 2D/3D [ 31 ، 32 ] و زیربخش سلسله مراتبی [ 33 ، 34 ] نمایش های رایج در GIS است. اینها میتوانند از ساختارها و الگوریتمهای مشابه بهعنوان نمونههای دوبعدی/سهبعدی خود استفاده کنند و بنابراین پیادهسازی آنها آسان است، اما تنها قادر به دستیابی به تقریبهای تقریبی از مرزهای اجسام هستند و با افزایش ابعاد، اندازه آنها بهطور تصاعدی افزایش مییابد. ساختارهای داده برداری با اطلاعات توپولوژیکی محدود، مانند ویژگی های ساده [ 35] یا نمودارهای بروز [ 36 ، 37 ، 38 ]، که احتمالاً با محاسبه توپولوژی در حال پرواز [ 39 ] ترکیب می شوند، در ابعاد بالاتر نیز غیرقابل تحمل می شوند. مدلهای ضمنی، مانند هندسه جامد سازنده و عملیات مجموعه بولی روی نیمفضاها، به خودی خود کافی نیستند و عموماً باید به مدلی دیگر، واضحتر تبدیل شوند تا بتوان آنها را تحلیل و تجسم کرد [40 ] .
به دلیل این کاستی ها، امیدوارکننده ترین گزینه استفاده از ساختارهای داده بردار توپولوژیکی n D است. برخی از این ساختارها شامل تقسیم همه اشیاء به سادههای هندسی ( به عنوان مثال ، تعمیم مثلثهای دو بعدی و چهار وجهی سه بعدی به ابعاد دلخواه) است که یک مجتمع ساده را تشکیل میدهد. چندین ساختار وجود دارد [ 41 ] که از نظر مفهومی ساده و آسان برای پیاده سازی هستند. با این حال، انجام تقسیمبندی هر شی به سادهسازیها مستلزم استفاده از یک مثلث محدود یا منطبق است [ 42 ، 43 ]، که در عمل در بیش از سه بعد بسیار سخت است (از آنجایی که نرمافزار موجود شناختهشدهای وجود ندارد).
بنابراین، مدلهای توپولوژیکی مرتبشده، که میتوانند کمپلکسهای سلولی عمومیتری را با استفاده از ساختار داخلی یک مجتمع ساده نشان دهند، مزایای واضحی دارند. نقشههای تعمیمیافته (g-maps) [ 44 ] و ساختار سلول تاپل [ 45 ] قادر به ذخیرهسازی کلاس بزرگی از مجتمعهای سلولی، از جمله اشیاء منیفولد جهتپذیر و غیرقابل جهتیابی با ابعاد دلخواه، از جمله اشیاء با مرز توسط پودرت و همکاران هستند . [ 46 ]. آنها در کتابخانه ها و نرم افزارها از جمله Moka و Gocad پیاده سازی شده اند. نقشه های ترکیبی [ 44] نیاز به تعریف یک جهت برای اشیاء دارد، اما از نیمی از فضای ذخیره سازی نقشه های تعمیم یافته استفاده کنید. آنها همچنین در کتابخانه های بالغ، مانند CGAL و CGOGN [ 47 ] پیاده سازی شده اند.
2.5. الگوریتم های ساخت و ساز برای یک مدل 4 بعدی
ما قبلاً دو الگوریتم ساخت و ساز سطح پایین را برای n شیء D توسعه داده ایم. اینها می توانند به عنوان پایه ای برای ایجاد مدل های 4 بعدی به روش زیر استفاده شوند: (1) هنگامی که اشیاء سه بعدی نسبتاً بدون تغییر در امتداد بعد LOD باقی می مانند، مدل 4 بعدی را می توان از 3 بعدی به 4 بعدی اکسترود کرد و اشیاء منشوری ساده را ایجاد کرد که احتمالاً بیشتر هستند. فرآوری شده؛ یا (2) زمانی که به مدلهای 4 بعدی با شکل دلخواه نیاز است، چهرهها و حجمهای منفرد در مرز مدل 4 بعدی به صورت تدریجی ساخته و مرتبط میشوند.
روش اول از یک عملگر اکستروژن مستقل از ابعاد استفاده می کند [ 48 ، 49 ]. این یک مدل n بعدی را به درون می آورد( n + 1 )(�+1)فضای بعدی با اختصاص دادن به هر شی n بعدی محدوده ای که در امتداد آن وجود دارد، ایجاد می کند، مجموعه ای از چند توپ منشوری، مشابه منشورهای سه بعدی ایجاد می کند. به طور شهودی، این کمپلکس سلولی جدید شامل وجههای «پایه» و «بالا» است که از مجموعه سلولی اصلی ساخته شدهاند. rدقیقه�دقیقهو rحداکثر�حداکثربه ترتیب به عنوان مختصات n- ام در صفات صفر خود اضافه می شوند. این “پایه” و “بالا” توسط مجموعه ای از وجوه منشوری اضافی که مربوطه را به هم مرتبط می کنند، به هم می پیوندند ( n – 2 )(�–2)-سلول ها (برآمدگی) سلول های پایه و بالا. این روش برای مورد ما مناسب نیست، زیرا دو LOD باید توپولوژی یکسانی داشته باشند، که در عمل نادر است (ما در بخش 4 نشان میدهیم که تقریباً در همه موارد، تفاوت قابل توجهی دارند).
رویکرد دوم، که عمومیتر است و برای مورد ما مناسبتر است، به ما امکان میدهد از کمپلکسهای سلولی دلخواه که با استفاده از قوانین پیوند ارائه شده در این مقاله تولید شدهاند، استفاده کنیم. این مستلزم آن است که ابتدا باید تمام حجم های مرزی که دو مدل را به هم پیوند می دهند تولید شوند و از تعریف تمام نقاط 4 بعدی ضروری فرم شروع شود. ( x ، y، z، ل )(ایکس،�،�،ل)، جایی که ( x ، y، z)(ایکس،�،�)سه بعد فضایی و l نقطه ای در محور LOD است. سپس اینها در ابعاد فزاینده به هم متصل می شوند تا چهره ها، حجم ها و چهار سلول برای هر شی 4 بعدی را تشکیل دهند. طرحهای تولید اینها در بخش 4.2 توضیح داده شدهاند ، و میتوان آنها را با استفاده از عملگر ساختوساز افزایشی [ 50 ] که مجموعهای از ( من – 1 )(من–1)سلول ها یک سلول i بسته را تشکیل می دهند و آنها را در امتداد مشترک خود به هم می پیوندند ( من – 2 )(من–2)سلولها (برآمدگیها) برای ایجاد سلول i فوقالذکر با ایجاد همه روابط توپولوژیکی بین آنها.
2.6. برش برای استخراج یک مدل سه بعدی در یک LOD خاص
به منظور به دست آوردن یک مدل سه بعدی از یک مدل 4 بعدی یکپارچه در یک LOD مشخص، می توان با برش ابعاد یک شی فضایی را کاهش داد [ 11 ]. در این عملیات، مجموعهای از اجسام با ابعاد بالاتر به صورت هندسی با یک جسم دیگر با ابعاد پایینتر تلاقی میکنند که اغلب در امتداد برخی از ابعاد نامحدود و متعامد با محورهای دیگر قرار دارند. سپس نتیجه نهایی را میتوان بر حسب فضای ابعادی پایینتر القا شده توسط این شی ارائه داد، که معادل یک طرح املایی از تقاطع به یک سیستم مختصات است که فضای برداری را که در آن قرار دارد، توصیف میکند.
به منظور استخراج یک مدل سه بعدی در LOD l معین از یک مدل 4 بعدی، شی مورد استفاده یک حجم سه بعدی نامحدود است که در 4 بعدی جاسازی شده است. این شبیه به این است که چگونه یک صفحه نامحدود را می توان در سه بعدی جاسازی کرد تا سطح مقطعی از یک جسم ایجاد کند. حجم سه بعدی نامحدود منطقه ای از فضای سه بعدی است که شبیه به آن است آر3ℝ3و متعامد به محور LOD l ، محدوده را پوشش می دهد ( − ∞ , ∞ )(–∞،∞)در امتداد سه بعد فضایی ( x ، y، z)(ایکس،�،�)و داشتن یک مقدار واحد در امتداد محور LOD l . توجه داشته باشید که اگرچه در ادامه این مقاله، تنها برش متعامد در امتداد محور LOD (تولید مدل سه بعدی یک LOD ثابت) را در نظر می گیریم، مدل های مخلوط-LOD به دست آمده از صفحات برش های غیر متعامد امکان پذیر است: Van Oosterom و Meijers [30] . ] یک مورد را به صورت سه بعدی نشان دهید (که به 4 بعدی تعمیم داده نشده است).
3. روش مدل سازی LOD به عنوان یک بعد هندسی اضافی در یک مدل 4 بعدی واقعی
ترکیب ویژگی های غیر فضایی به عنوان ابعاد اضافی در مفهوم هندسی منجر به بافتی از فضای با ابعاد بالاتر می شود که در آن اشیا می توانند جاسازی شوند. به عنوان بسط مفاهیم استاندارد مدل سازی داده های مکانی، این فضا را می توان به عنوان فضای اقلیدسی d- بعدی مدل کرد.آردℝد. به این ترتیب، هر بعد با یک محور مستقل (عمود) و یک نقطه در این فضا با یک d -tup از مختصات تعریف می شود .
سپس این فضای با ابعاد بالاتر توسط مجموعهای از اجسام با ابعاد از صفر ( یعنی نقاط ) تا d ( یعنی d -polytopes) پر میشود. اینها همپوشانی ندارند و بنابراین، همراه با فضای خالی اطراف آنها، پارتیشنی از فضا را القا می کنند، به طور مشابه به مجموعه ای از چند ضلعی ها که یک پارتیشن مسطح را در دو بعدی تشکیل می دهند. همانطور که در GIS معمول است، فرض می کنیم که این اجسام دارای هندسه خطی ( به عنوان مثال ، مسطح) هستند، که به طور قابل توجهی نمایش آنها و اکثر عملیات را ساده می کند.
در مورد خاص یک مدل 4 بعدی (فضای 3 بعدی + LOD)، این بدان معنی است که ما یک محور LOD اضافی l داریم و یک نقطه در فضای 4 بعدی با چند مختصات تعریف می شود. ( x ، y، z، ل )(ایکس،�،�،ل). شایان ذکر است که محور LOD باید به درستی پارامتربندی شود و مقادیر قابل اندازهگیری برای هر LOD ثابت در یک مدل یا در عوض، تابعی که این کار را انجام میدهد، تعریف شود.
فضای 4 بعدی با مجموعه ای از پلی کوراهای غیر همپوشانی پر شده است که در آن یک شی 3 بعدی (مثلاً یک ساختمان) در تمام LOD های مختلف آن به عنوان یک شی 4 بعدی منفرد نشان داده می شود. این شی 4 بعدی با مجموعه ای از حجم ها محدود می شود که دو عدد از آنها جسم در پایین ترین و بالاترین LOD و چندین مورد جانبی هستند که با پر کردن فضای بین وجه های متناظر در سراسر LOD ها تشکیل شده اند. هنگامی که برش داده می شوند، به ترتیب با حجم ها و وجه های مرزی یک مدل سه بعدی استخراج شده مطابقت دارند.
توجه داشته باشید که یک مدل 4 بعدی واقعی به ما اجازه میدهد نه تنها بازنماییهای مختلف یک شی را به هم مرتبط کنیم، بلکه فراتر میرود، زیرا ما را قادر میسازد تا روابط پیچیدهتری را بین اشیا مدلسازی و ذخیره کنیم. یک مثال زمانی است که چندین شیء در یک ادغام می شوند. رسیدگی به این مورد با شناسه ها دشوار است (شئ جدید باید کدام شناسه را دریافت کند؟). با این حال، اگر روابط توپولوژیکی بین اشیاء به صراحت ذخیره شده باشد، برای شناسایی چنین موردی کافی است که آنها را تجزیه و تحلیل کنیم. اگر چندین شیء به طور همزمان در طول چندین پارامتر تغییر کنند، مانند تغییر شکل (مثلاً به دلیل یک فرآیند ساده سازی) و حرکت در طول زمان، می توان بعد دیگری (زمان) را نیز به مدل اضافه کرد و یک مدل 5 بعدی به دست آورد. [ 9] که می تواند به عنوان مجموعه ای از اشیاء 5 بعدی مدل سازی شده به عنوان یک مجموعه سلولی 5 بعدی نمایش داده شود. چنین مدلی می تواند به عنوان یک مجموعه سلولی 5 بعدی با یک تعریف مشابه به عنوان مجتمع سلولی 4 بعدی ارائه شده در اینجا نشان داده شود. توجه داشته باشید که اگرچه این یک تغییر ساده از نظر مدل و ذخیره سازی آن است، عملیات 5 بعدی برای ایجاد و دستکاری چنین اشیایی باید توسعه داده شود تا چنین مدلی مفید باشد.
ما مدل 4 بعدی فوق الذکر را با یک مجموعه سلولی 4 بعدی، تقسیم بندی فضا به سلول ها، به گونه ای که برای همه i , 0 ≤ i ≤ 4من،0≤من≤4، یک سلول i -بعدی ( i -cell) یک شی توپولوژیکی همومورف به توپ i است (به عنوان مثال، نقطه، قطعه، دیسک، توپ، و غیره ). برای همه من > 0من>0، هر سلول i در مجتمع دارای تعدادی است ( من – 1 )(من–1)-سلول ها (چهره ها) به عنوان مرز آن، که آنها نیز بخشی از مجموعه هستند. مرزهای مشترک دو سلول i با تقاطع آنها داده می شود و مجموعه ای از آنها را برمی گرداند ( من – 1 )(من–1)-سلول ها که بخشی از مجموعه هستند. هر سلول صفر ( یعنی یک راس) به چند مختصات متصل است ( x ، y، z، ل )(ایکس،�،�،ل)نشان دهنده یک نقطه در فضای 4 بعدی سپس این مجموعه سلولی 4 بعدی را می توان در هر یک از ساختارهای داده ارائه شده در بخش 2.4 ذخیره کرد .
4. ساخت یک مدل 4 بعدی از یک مدل شهر سه بعدی و LOD های آن
ساختمانها در مدل سه بعدی شهر اغلب در چندین LOD مدلسازی میشوند. به عنوان مثال، در استاندارد CityGML [ 5]، پنج LOD مجزا را می توان ذخیره کرد (از ردپای دوبعدی ساختمان تا نمایشی که در آن پنجره ها، درها و دیوارها و حتی اشیاء داخلی همه با جزئیات مدل شده اند). این نمایشهای متفاوت در بیشتر موارد از جزئیترین LOD مشتق نشدهاند (مثلاً با روشهای تعمیم)، بلکه با تکنیکهای مختلف، اغلب برای اهداف متفاوت، جمعآوری میشوند، و بنابراین، نمایشهای بهدستآمده لزوماً مطابقتهای قابل شناسایی ندارند. . یک شیء مشابه می تواند کمی در LOD های مختلف جابجا شود. یک شی میتواند مجموعهای از اشیاء دیگر باشد (یک خانه پلکانی را در نظر بگیرید: یا هر خانه نشان داده میشود یا یک جلد برای کل ردیف) یا میتواند به روشی کاملاً متفاوت مدلسازی شود.
ساخت یک مدل 4 بعدی از LOD های موجود یک مدل شهر سه بعدی شامل سه مرحله است:
-
شناسایی سلول های 0D-3D مربوطه.
-
پیوند آنها با ایجاد سلول های 1D-4D که آنها را به هم متصل می کند.
-
استفاده از یک الگوریتم ساخت افزایشی [ 50 ] برای ساختن یک مجموعه سلولی 4 بعدی با استفاده از تمام سلول های 0D-4D.
ما ابتدا در این بخش روشهای مختلفی را برای شناسایی سلولهای متناظر در LODهای مختلف یک شی سهبعدی ارائه میکنیم ( بخش 4.1 )، و سپس، چهار طرح پیوند برای ساخت یک مدل 4 بعدی را ارائه میکنیم ( بخش 4.2 ). همانطور که در بخش 5 در مورد موارد استفاده نشان میدهیم ، سلولهای 4 بعدی ایجاد شده توسط طرحهای پیوند برای ساخت مجتمعهای سلولی 4 بعدی با خواص و شکلهای مختلف استفاده میشوند که هر کدام نیازمندیهای خاص خود را دارند.
4.1. مرحله 1: شناسایی سلول های متناظر در مدل های سه بعدی
ساخت یک مدل 4 بعدی از دنباله ای از مدل های سه بعدی تا حد زیادی به شناسایی سلول های 0-، 1-، 2- و 3 مربوطه بین این مدل های سه بعدی بستگی دارد. هدف از این شناسایی، ایجاد یک نقشه بین مدلهای سهبعدی است که روابط توپولوژیکی بین عناصر موجود در مدلها را حفظ میکند تا یک مدل ۴ بعدی معتبر ایجاد شود.
با در نظر گرفتن مدلهای سهبعدی در LODهای مختلف، این شناسایی اغلب منجر به تطبیق سلولهایی با ابعاد مختلف میشود، معمولاً برخی از سلولها در مدل سهبعدی در بالاترین LOD با سلولهایی با ابعاد پایینتر در مدل سهبعدی در پایینترین LOD مطابقت دارند. علاوه بر این، این مطابقتها اغلب منجر به نگاشت یک به یک نمیشوند: گروههایی از سلولهای مجاور در یک مدل، اغلب در یکی با بالاترین LOD، معمولاً با یک سلول در مدل دیگر مطابقت داده میشوند.
شناسایی سلولهای منطبق باید با استفاده از ترکیبی از موارد زیر انجام شود، احتمالاً به ترتیب اولویت:
ویژگی ها: از اطلاعات معنایی ذخیره شده در سلول ها، زمانی که در دسترس هستند، استفاده کنید. برای مثال، تطبیق دو سلولی که از طریق استفاده از شناسهها معادل هستند، یا اگر دانش در طول فرآیند تعمیم حفظ شود، تطبیق یک سلول با سلولی که به عنوان نسخه سادهشده آن شناخته میشود.
توپولوژی: هنگامی که بین دو سلول یک نگاشت یک به یک (یک بیژکشن) وجود دارد که تمام روابط توپولوژیکی آنها را حفظ می کند، این نگاشت به عنوان یک هم ریختی شناخته می شود و سلول ها هم شکل هستند. بنابراین، ایزومورفیسم بین دو سلول در حال حاضر تطابق بین آنها را ایجاد می کند، اگرچه ممکن است بررسی اینکه ایزومورفیسم با تطبیق سلول های دیگر در مدل و با محدودیت های هندسی سازگار است مهم باشد. به همین ترتیب، گوسلین و همکاران. [ 51 ] نحوه محاسبه ایزومورفیسم را در یک نقشه تعمیم یافته از هر بعد توضیح می دهد. یکی دیگر از امکان پیچیده تر، استفاده از ایزومورفیسم زیرگراف در بخش های غیرقابل تطبیق یک نقشه تعمیم یافته است [ 52 ]، حتی اگر این مشکل به عنوان NP-کامل شناخته شود.
روش دیگر برای استفاده از توپولوژی استفاده از روابط توپولوژیکی بین سلول ها به منظور استنباط مطابقت برای سلول های باقی مانده است [ 27 ]. این در مثال شکل 3 به طور ملموس تر توضیح داده شده است .
هندسه: از محاسبات هندسی استفاده کنید، مانند محاسبات مبتنی بر معیارهای تشابه محاسباتی، به سادگی تطبیق سلول های بی همتا در یک مدل با نزدیک ترین همسایه خود در مدل دیگر یا تلاش برای به حداقل رساندن فاصله حرکت دهنده زمین (EMD) [53] بین آنها . با این حال، محاسبه این تطابق ها با استفاده از محدودیت هایی که به طور کلی موقعیت های نسبی و روابط توپولوژیکی بین سلول ها را حفظ می کنند، مهم است. به عنوان مثال، یک الگوریتم حریصانه میتواند سلولها را به صورت تکراری مطابقت دهد، این تطابقها را به سلولهای مجاور (در همه مدلها) آبشاری کند یا مواردی را که محدودیت هندسی یا توپولوژیکی را نقض میکنند، رد کند.
آخرین امکان برای کمک به هنگام تطبیق سلولها این است که با افزودن سلولهایی با ابعاد پایینتر به روشی که هندسه سلول را تغییر نمیدهد، یک سلول i به سلولهای i متعدد تقسیم شود. به عنوان مثال، یک صورت را می توان با افزودن یک راس در داخل آن و ایجاد لبه هایی که آن را به برخی از رئوس صورت مرتبط می کند، به چند وجه تقسیم کرد. این می تواند دو کمپلکس سلولی را ایزومورف کند و مستقیماً امکان نقشه برداری یک به یک بین دو کمپلکس سلولی را فراهم کند.
4.2. مرحله 2: پیوند سلول های مربوطه
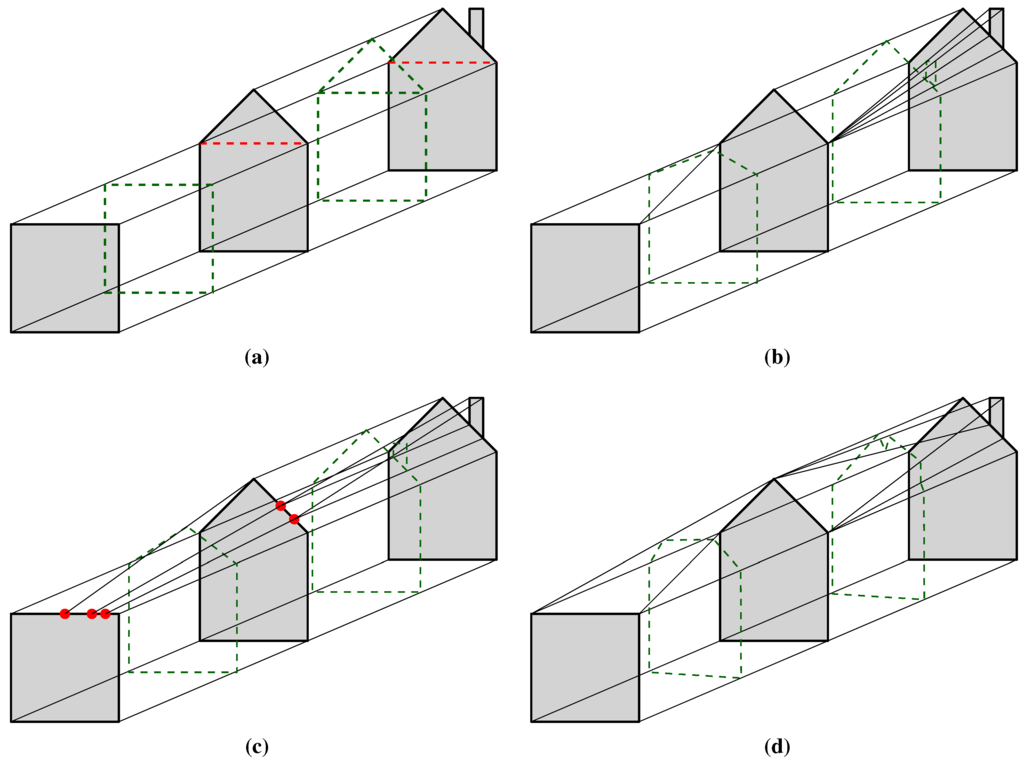
بر اساس تطابقهایی که بین سلولها یافت شد، که از نظر ریاضی نقشهای را بین مجتمعهای سلولی سه بعدی مدلهای سهبعدی تعریف میکنند، میتوانیم متعاقباً آنها را برای ساختن یک مجموعه سلولی چهار بعدی پیوند دهیم. برای این کار، ممکن است لازم باشد سلولهای 0D-3D در مجتمعهای سلولی ورودی ایجاد یا اصلاح شوند، و همچنین سلولهای 1D-4D جدید که بین مجتمعهای سلولی قرار دارند، ایجاد شود. سپس مجتمع سلولی 4 بعدی با اختصاص مختصات 4 بعدی جدید برای هر نقطه در فضای 4 بعدی جاسازی می شود. ما چهار طرح پیوند پایه مختلف را پیشنهاد می کنیم که در شکل 1 نشان داده شده است .
4.2.1. روش 1: پیوند ساده سلولهای متناظر
پیوندها بین سلول های متناظر یک شی در دو LOD مختلف ساخته می شوند و اگر سلولی سلول متناظر نداشته باشد، نادیده گرفته می شود. در حالی که این به ما اجازه میدهد تا در مواردی که همه سلولهای مدل LOD پایینتر دارای یک سلول متناظر در مدل LOD بالاتر هستند، به راحتی یک مجتمع سلولی 4 بعدی بسازیم، در حالی که اینطور نیست، نتیجه شامل یک مجتمع سلولی 4 بعدی ناقص خواهد بود.
برای اطمینان از کامل بودن، سلول ها اغلب باید تقسیم شوند (به عنوان مثال، آنهایی که با خط نقطه قرمز در شکل 1 الف از هم جدا شده اند)، که می تواند با استفاده از تقاطع های هندسی انجام شود. در حالی که این در سه بعدی امکان پذیر است و ابزارها به راحتی در دسترس هستند (به عنوان مثال، Granados et al. [ 54 ], Hachenberger [ 55 ] را ببینید)، باید توجه داشت که تعمیم این طرح به ابعاد بالاتر ( به عنوان مثال ، 5D +) در عمل آسان نیست، زیرا هیچ ابزار تقاطع قوی در بیش از سه بعدی در دسترس نیست. توجه داشته باشید که اگر یک کمپلکس سلولی 4 بعدی که با استفاده از این روش تولید شده است در یک LOD متوسط بریده شود، نتیجه دقیقاً همان LOD پایین تر است.
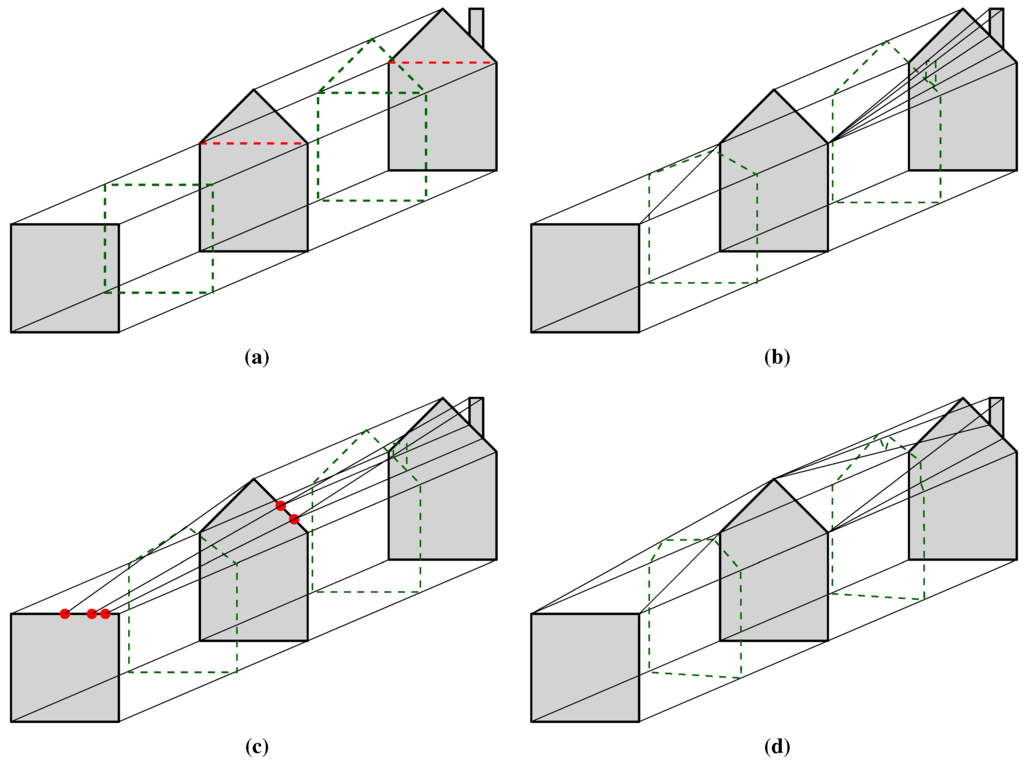
شکل 1. چهار طرح پیوند برای سه سطح جزئیات (LOD) یک خانه، که در اینجا به صورت 2 بعدی نشان داده شده است: ( الف ) پیوند ساده. ( ب ) بی همتا جمع شده اند. ( ج ) اصلاح توپولوژی و ( د ) تطبیق همه با موجود. اشیایی که با برش دادن بین LOD ها به دست می آیند را می توان در خطوط سبز چین دار مشاهده کرد. خطوط چین قرمز منعکس کننده سلول هایی هستند که باید اضافه و تقسیم شوند تا از یک مجموعه سلولی معتبر 3 بعدی (2D + LOD) اطمینان حاصل شود.
4.2.2. روش 2: سلول های بی همتا به سلول های موجود جمع می شوند
هیچ تغییری در مدلهای سهبعدی انجام نمیشود، که در عمل یک مزیت قابلتوجه است، زیرا نیازی به انجام هیچ عملیات هندسی پیچیدهای نیست و اندازه مجموعه سلولی کوچکتر از مجموعهای است که سلولها در آن اصلاح میشوند. به جای عملیات هندسی، سلولهای بیهمتا در مدل LOD بالاتر به سلولهای همسان نزدیک با ابعاد احتمالاً پایینتر در مدل LOD پایینتر متصل میشوند و در عین حال محدودیتهای هندسی و توپولوژیکی خاصی را حفظ میکنند (به عنوان مثال، حفظ مجاورت و بروز بین سلولها). این نشان میدهد که برخی از سلولها جمع میشوند (مثلاً، یک یال را میتوان به یک راس نگاشت)، و سلولها باید با احتیاط مرتبط شوند تا اطمینان حاصل شود که یک مجتمع سلولی 4 بعدی معتبر ایجاد میشود (مثلاً هیچ دو سلولی نباید متقاطع شوند).
به عنوان مثال، فرض کنید که لبه سمت چپ سقف خانه در مدل LOD میانی در شکل 1 b (به طور خودسرانه) با سقف مدل LOD کم مطابقت داده شده است، با لبه سمت راست بدون همتا باقی مانده است، زیرا هیچ سلولی بی همتا باقی نمانده است. در مدل LOD کم در این حالت با علم به اینکه سقف و دیوار سمت راست در مدل LOD کم مجاور هستند، اما سلول های متناظر آنها (به ترتیب لبه سمت چپ و دیوار راست) توسط لبه سمت راست در مدل LOD میانی از هم جدا می شوند، لبه سمت راست می تواند به راس مشترکی که بین این دو قرار دارد جمع شود (بالا سمت راست). با استفاده از چنین نقشهبرداری، روابط توپولوژیکی بین سلولها حفظ میشود، به استثنای آنهایی که سلولهای فرو ریخته و آنهایی که برخورد میکنند یا مجاور آنها هستند.
توجه داشته باشید که هنگامی که نقشه برداری دارای خطا است و مجموعه سلول های 4 بعدی حاصل دارای مشکلات هندسی است (مثلاً سلول های متقاطع)، عملیات برش ممکن است معنای هندسی نداشته باشد، اما مزیت اصلی ادغام (سازگاری) همچنان برای آن تضمین می شود. تمام سلول های دیگر اطمینان از حفظ روابط توپولوژیکی سلول ها و ایجاد پارتیشن بندی فضا در 4 بعدی چالش برانگیز است و بخشی از کار آینده ما است. در نهایت، مشاهده کنید که حتی اگر یک مجموعه سلولی 4 بعدی از نظر ترکیبی و هندسی معتبر ساخته شود، شی 3 بعدی به دست آمده از برش ممکن است با واقعیت سازگار نباشد. توجه کنید که چگونه دودکش در شکل 1 b به دلیل نحوه اتصال سلول ها به طور فزاینده ای کوچکتر و به لبه سمت راست سقف نزدیکتر می شود.
4.2.3. روش 3: اصلاح توپولوژی
برای اطمینان از اینکه یک نقشه بین تمام سلول ها وجود دارد، می توانیم سلول ها را تقسیم یا ادغام کنیم تا توپولوژی (ساختار ترکیبی) اشیا یکسان باشد. به عنوان مثال، عملیاتی مانند حذف و انقباض [ 56 ] را می توان برای ساده سازی شی(های) پیچیده تر استفاده کرد تا با استفاده از یک فرآیند تکرار شونده، آنها را با یکی(های) ساده تر مطابقت دهد. از جهت دیگر، می توان ابتدا برای هر سلول در مدل LOD پایین، یک یا چند سلول متناظر در مدل LOD بالاتر را شناسایی کرد، سپس سلول ها را در مدل LOD پایین تقسیم کرد، به طوری که توپولوژی آنها مانند مدل بالاتر باشد. مدل LOD به عنوان مدلی که باید به آن مرتبط شود.
در شکل 1c، برای کمترین LOD، این بدان معناست که ابتدا چندین منطبق برای سلولهای سقف مدلهای LOD پایینتر پیدا میشود، که سپس باید با درج رئوس جدید به سلولهای متعدد تقسیم شوند. به عنوان مثال، اینها می توانند در نزدیکترین مکان قرار گیرند که در سلول LOD پایینی مطابق برای هر سلول LOD بالاتر قرار دارد. همانطور که این مثال نشان می دهد، تمام نمایش های یک شی که در آن از این رویکرد استفاده می شود، در نهایت توپولوژی یکسانی دارند. این منجر به افزایش فضای ذخیره سازی و امکان تخریب سلول ها می شود، به عنوان مثال، چندین راس در یک مکان. عملیات هندسی لازم برای تقسیم سلول ها نیز می تواند نسبتاً پیچیده باشد. توجه داشته باشید که با این حال، برش به یک نمایش متفاوت از شی منجر می شود که در آن شیء به آرامی به چیزی در LOD پایین تر تبدیل می شود (مثلاً با کاهش LOD، نوک سقف به آرامی پایین می آید).
4.2.4. روش 4: تطبیق همه سلول ها با سلول های موجود
همانطور که در روش 2 وجود دارد، این روش نیازی به اصلاح توپولوژی اشیا ندارد. تفاوت اصلی با آن این است که سلول ها در مدل LOD بالاتر لزوماً به سلول با ابعاد پایین تر در مدل LOD پایین تر جمع نمی شوند، بلکه در عوض با یک یا چند سلول از هر بعد تطبیق داده می شوند و در عین حال محدودیت های هندسی و توپولوژیکی خاصی را نیز حفظ می کنند. در شکل 1د، مشاهده کنید که نوک سقف مدل LOD وسط (یک نقطه) با سقف پایین ترین LOD (یک لبه، زیرا ما یک نمایش دو بعدی داریم) مطابقت دارد و دو لبه که نمایانگر سقف LOD وسط هستند مطابق با دو گوشه سقف (نقاط) پایین-LOD. بنابراین برش یک سقف کوتاه با سه لبه ایجاد می کند. این را می توان با تطبیق تمام سلول هایی که مطابقت واضحی دارند ابتدا بدست آورد، سپس سعی کرد گروه های سلول های بی همتا را مطابقت داد و در عین حال روابط توپولوژیکی بین سلول ها را حفظ کرد.
به عنوان مثال، در شکل 1 d، میتوان ابتدا پایه و دیوار خانهها را در مدلهای LOD پایین و میانی تطبیق داد، سپس راس باقیمانده و لبههای چپ/راست در مدل LOD میانی را به ترتیب با لبه سقف مطابقت داد. رئوس چپ/راست توجه داشته باشید که در این فرآیند، نوک سقف مدل LOD وسط (یک نقطه) با سقف پایین ترین LOD (یک لبه) و دو لبه سقف (لبه) با دو گوشه منطبق می شود. سقف (نقاط) در پایین ترین LOD. برش مجموعه سلولی 4 بعدی حاصل، یک سقف کوتاه با سه لبه ایجاد می کند. مطابقت دودکش با عناصر دیگر در شکل 1d با تطبیق بالای دودکش با لبه سمت راست و رئوس و لبه های باقیمانده به سمت چپ و راست آن به ترتیب با نوک سقف و رئوس لبه/دیوار راست به دست می آید. نتیجه این است که در حالی که دودکش شباهت خود را به واقعیت از دست می دهد، در مدل LOD وسط به آرامی به سقف همگرا می شود.
5. موارد استفاده
ما در این بخش مثالهای عملی ارائه میکنیم که تطبیق و پیوند سلولها را برای چند مدل سهبعدی ساده نشاندهنده یک شی (ها) یکسان در LODهای مختلف توصیف میکنند.
5.1. استفاده از روش 1: پیوند ساده
شکل 2 مثالی را نشان می دهد که در آن دو LOD برای یک ساختمان به گونه ای به هم متصل شده اند که فقط سلول های منطبق در آن دخالت دارند.

شکل 2. دو LOD از یک خانه به سادگی به هم متصل شده و LOD میانی بدست می آید.
ابتدا، مشاهده کنید که از آنجایی که دو جسم هم شکل نیستند، برخی از سلول ها مطابقت ندارند (آنهایی که سقف مدل LOD بالاتر را نشان می دهند). همچنین توجه داشته باشید که سقف مدل low-LOD در مدل بالاتر-LOD همخوانی ندارد. بنابراین، برای ساخت یک مجموعه سلولی 4 بعدی، هندسه سقف تخت باید به مدل LOD بالاتر اضافه شود. سپس، سلول های مربوطه را می توان پیوند داد. اگرچه امکان تولید این مدل 4 بعدی با تولید وجود دارد ( من + 1 )(من+1)سلولهایی که یک جفت سلول i متناظر را به هم متصل میکنند و همه آنها را به هم مرتبط میکنند، اکسترود کردن یک کمپلکس سلولی در امتداد محدوده بین دو LOD سادهتر است.
این در حال حاضر ساختار ترکیبی مناسب مدل 4 بعدی را ایجاد میکند و مجموعه سلول نهایی را میتوان با حرکت دادن رئوس صورت که مدل را در LOD دیگر نشان میدهد بهگونهای به دست آورد که هندسه مدل دیگر در LOD آن مطابقت داشته باشد. علاوه بر این، از آنجایی که ما یک مجموعه سلول خطی را فرض میکنیم و بنابراین فقط راسها هندسه مدل را ذخیره میکنند، فقط لازم است رئوس را در پایینترین LOD بدون راس متناظر در بالاترین LOD حرکت دهیم.
5.2. استفاده از روش 2: فرو ریختن
شکل 3 نمونه ای را با یک مدل سه بعدی در دو LOD با هندسه و توپولوژی متفاوت نشان می دهد.

شکل 3. دو LOD از یک خانه با هندسه و توپولوژی متفاوت در یک مدل 4 بعدی با فروپاشی سلول های مدل در بالاترین LOD ادغام می شوند.
مدل 4 بعدی ابتدا با تطبیق دو سلول با تناظرهای شناخته شده (چپ، راست، جلو و عقب بزرگ) و استنباط این که سایر وجوه در مدل در بالاترین LOD (راست) باید بر اساس مجاورتشان جمع شوند، به دست آمده است. روابط با چهره های همسان به عنوان مثال، از آنجایی که وجه های جلو و راست در پایین ترین LOD مجاور هستند، اما در بالاترین LOD مجاور نیستند، دو وجه بین آنها باید در مرز مشترک خود جمع شوند ( یعنی، تقاطع آنها: لبه بین آنها). به طور ترکیبی، این شامل جستجوی مسیری بین وجه جلو و سمت راست در نمودار مدل در بالاترین LOD است، چنین جستجویی محدود به گرههایی است که چهرههای فوقالذکر را نشان میدهند و آنهایی که چهرههایی را نشان میدهند که در مدل موجود نیستند. کمترین LOD این مثال همچنین نشان میدهد که روابط توپولوژیکی بین سلولها به استثنای آنهایی که درگیر سلولهای فروپاشی شده بودند، حفظ میشوند. با این حال، روابط توپولوژیکی جدید سلولها را در اطراف سلولهای فرو ریخته قبلی به هم متصل میکند. توجه داشته باشید که مدل سه بعدی حاصل از برش مدل چهار بعدی ایجاد شده به این روش در یک LOD متوسط (وسط) نسبت به مدل در بالاترین LOD هم شکل خواهد بود.
5.3. با استفاده از روش 3: اصلاح توپولوژی
شکل 4 نمونه ای از دو مدل سه بعدی در حال تجمیع را نشان می دهد.
برای ایجاد یک مدل 4 بعدی از این وضعیت، توپولوژی سادهتر از دو مدل اصلاح میشود و حجم واحد را به دو حجم مجاور تقسیم میکند و در واقع یک مجموعه سلولی ایجاد میکند که همچنین دارای چهار راس بیشتر، چهار یال بیشتر و چهار چهره آن به دو قسمت تقسیم شد. توجه داشته باشید که این دو مدل با این حال هم شکل نیستند، زیرا وجه مشترک دو خانه در پایین ترین LOD به دو وجه جدا شده در مدل در بالاترین LOD تبدیل می شود، اما اگر این رابطه توپولوژیکی را نادیده بگیریم، این دو مدل می توانند به درستی مطابقت داده شوند. به طور مستقل

شکل 4. دو LOD از دو خانه در حال تجمیع با تغییر توپولوژی مدل در پایین ترین LOD به طوری که توپولوژی مدل در بالاترین LOD مطابقت داشته باشد در یک مدل 4 بعدی ادغام می شوند.
5.4. ترکیبی از روش های 2 و 3
شکل 5 یک مثال پیچیده تر با سه LOD را نشان می دهد که با استفاده از ترکیبی از طرح ها به هم مرتبط شده اند: فروپاشی و اصلاح توپولوژی یکی از مدل ها.

شکل 5. سه LOD از یک مدل سه بعدی یک خانه با تغییر توپولوژی مدل در کمترین LOD و فرو ریختن بخشی از مدل در بالاترین LOD در یک مدل 4 بعدی ادغام می شوند.
بیشتر سلولهای موجود در بالاترین LOD را میتوان مستقیماً با سلولهای LOD میانی مطابقت داد، به استثنای آنهایی که بخشی از دودکش هستند. از آنجایی که اینها یک جسم کوچک را تشکیل می دهند، به سادگی در یک نقطه در وسط LOD جمع می شوند. با این حال، تطبیق سلولهای سقف در پایینترین و متوسط LOD پیچیدهتر است، زیرا ریزش آن به یک نقطه، مجاورت آن با بدنه خانه را نادیده میگیرد و بنابراین، توپولوژی آن را حفظ نمیکند. بنابراین بهترین راه حل این است که توپولوژی کمترین LOD را تغییر دهیم تا سطح بالای خانه مکعبی (که می دانیم یک سقف بر اساس ویژگی های آن است) به چهار وجه تقسیم شود و مدل به LOD میانی هم شکل باشد.
5.5. استفاده از روش 4: تطبیق با سلول های موجود
شکل 6 دو مورد از LOD های مثال قبلی را نشان می دهد، اما سلول های سقف خانه را به جای تغییر توپولوژی آنها با سلول های موجود مطابقت می دهد.

شکل 6. دو LOD از یک مدل سه بعدی یک خانه (چپ و راست) علیرغم اینکه هم شکل نیستند، با یک LOD میانی که نتیجه برش ساختن را در یک LOD میانی (مرکز) نشان می دهد، به هم متصل شده اند.
پس از تلاش برای تطبیق سلول های مربوطه، صفحه بالایی در پایین ترین LOD و چهار وجهی بالایی در بالاترین LOD بی همتا باقی می مانند. اگر هر وجه بالایی را در بالاترین LOD به نزدیکترین لبه بالایی در پایین ترین LOD ( یعنی لبه ای که پایین وجه مثلثی را در بالاترین LOD تشکیل می دهد) و رأس بالایی در بالاترین LOD (که بین LOD قرار دارد) جمع کنیم. faces) در پایین ترین LOD به بالای صفحه متصل می شود، یک هرم چهار وجهی ایجاد می شود. برش های آن به صورت چهار وجه ذوزنقه ای در LOD میانی برش داده شده نشان داده شده است. سپس، اگر فرو بریم، وجه بالایی در پایین ترین LOD تا راس بالایی بالاترین LOD، هرم چهار وجهی دیگری ایجاد می شود. یک برش از این یکی به صورت مربع در بالای LOD میانی برش داده شده نشان داده شده است.
این نگاشت خاص، که به درستی تمام روابط توپولوژیکی بین سلول ها را حفظ می کند، جالب است، زیرا نشان می دهد که سلول ها لزوما فقط از LOD های بالاتر به LOD های پایین تر فرو می روند. شایان ذکر است که نتیجه این نقشهبرداری مجموعهای از سلولها است که مدل را در امتداد بعد LOD محدود میکنند، به طوری که یک سلول i و یک سلول j که مطابقت دارند منجر به یک سلول k میشود که بین آنها قرار دارد، جایی که k = حداکثر ( i ، j ) + 1ک=حداکثر(من،�)+1. بطور مشخص، اگر برای مثال، یک سلول صفر (نوک سقف) با سقف صاف (دو سلولی) مطابقت داده شود، پیوندهای حاصل یک چهار وجهی (سه سلولی) ایجاد می کنند. همچنین توجه داشته باشید که اگرچه قوانین مورد نیاز برای ایجاد چنین نقشهبرداری ممکن است پیچیدهتر باشند، مجموعه سلولی تولید شده از نظر اندازه با مدل معادل مطابق طرح در شکل 1b یکسان است .
6. یک مثال مشخص: اجرای تطبیق سلول برای ساخت یک مدل 4 بعدی
به منظور نشان دادن نحوه عملکرد روش های پیوند ما در عمل، مدل نشان داده شده در شکل 6 را با استفاده از مجتمع های سلولی خطی CGAL و عملگر سازنده افزایشی شرح داده شده در Arroyo Ohori و همکاران، پیاده سازی کرده ایم. [ 50 ]. این مدل از آنجایی انتخاب شد که از بیشتر روشهای پیوند مورد بحث در بخش 4.2 استفاده میکند : بدنه خانه در هر دو LOD مستقیماً به هم مرتبط است (روش 1). سطح بالای خانه در LOD پایین به نوک سقف در LOD بالاتر فرو میرود (روش 2). و رئوس/لبه های سقف در LOD پایین به لبه ها/رئوس سقف موجود در LOD بالاتر متصل می شوند (روش 4).
اول از همه، 17 رأس دو مدل سه بعدی به عنوان نقاط 4 بعدی فرم ایجاد می شوند. ( x ، y، z، ل )(ایکس،�،�،ل). سپس، ابتدا از اینها برای تعریف 35 وجه مدل استفاده می شود. از چهره ها برای تعریف 12 جلد و از ولوم ها برای تعریف تک سلولی استفاده می شود. توجه داشته باشید که اینها شامل چهرهها و حجمها در هر یک از دو حجم مدلهای سهبعدی ورودی هستند، اما همچنین شامل برخی از چهرهها و حجمهایی هستند که بین این دو قرار دارند، یعنی دارای رئوس و وجههایی در هر دو مدل سهبعدی ورودی هستند. گزیدهای از کد برای تولید مجتمع سلولی 4 بعدی در شکل 7 نشان داده شده است .

شکل 7. گزیدههایی از کد که نشان میدهد چگونه ( الف ) یک مدل 4 بعدی از خانه نشان داده شده در شکل 6 ساخته شده است. ( ب ) وجه ها به عنوان چرخه های رئوس، حجم ها به عنوان مجموعه ای از چهره ها و چهار سلولی به عنوان مجموعه های سه سلولی ایجاد می شوند. ( ج ) رئوس بر اساس نقاط 4 بعدی ایجاد می شوند. رنگ های اشاره شده در (ب) با چهره ها و حجم های برجسته در (الف) مطابقت دارد.
سپس مدل 4 بعدی حاصل با بررسی ویژگیهای یک نقشه ترکیبی معتبر اعتبارسنجی شد ( ر.ک. Lienhardt [ 44 ]). به طور خلاصه، ما آزمایش کردیم که آیا دارتها (سادههای ترکیبی) در نقشه چرخشها یا جایگشتهای صحیحی را تشکیل میدهند و آیا هیچ دارتی پس از عملیات آزاد باقی میماند. ما همچنین بخشهای مجزای مدل (وجهههای مثلثی یا مربعی و حجمهای موازی یا هرمی شکل) را با تأیید همشکل بودن آنها نسبت به اشیاء مشابه که معتبر شناخته شده بودند، تأیید کردیم [51 ] .
7. بحث و کار آینده
در حالی که ادغام LOD های مختلف از یک شی 3 بعدی در یک مدل 4 بعدی از نظر فنی پیچیده تر از نگهداری جداگانه آنها است، ما نشان داده ایم که ایجاد چنین مدل 4 بعدی با شناسایی عناصر منطبق در LOD های مختلف، پیوند آنها برای به دست آوردن عناصر اولیه 4 بعدی و در نهایت، ساخت و ذخیره یک مجموعه سلولی 4 بعدی با الگوریتم ها و ساختارهای داده ای که به راحتی در دسترس هستند. ما معتقدیم که مزایای این ادغام بسیار زیاد است.
اول، راهحلی اساسی برای نگهداری این مدلها ارائه میکند، زیرا هر بهروزرسانی میتواند به LODهای دیگر منتشر شود. بنابراین می توان از سازگاری مدل در تمام LOD اطمینان حاصل کرد، به عنوان مثال، با استفاده از بررسی های اعتبار در Gröger و Plümer [ 57 ]. بنابراین چنین مدل 4 بعدی از استفاده مجدد از داده های سه بعدی جمع آوری شده پشتیبانی می کند.
دوم، از آنجایی که هر برنامه اغلب به مشخصات LOD خاص خود نیاز دارد [ 1 ]، اینها در تئوری می توانند از مدل 4 بعدی استخراج شوند. ما نشان دادهایم که طرحهای پیوندی مختلف، مدلهای ۴ بعدی با ویژگیهای متفاوت و مدلهای سهبعدی (بهدستآمده از برش) که برای کاربردهای مختلف مفید هستند، ارائه میدهند. علاوه بر این، اگر عملگر برش را تعمیم دهیم و اجازه دهیم برش ها نسبت به محور LOD غیر متعامد باشند (برش های متعامد یک LOD ثابت ایجاد می کنند)، مدل های سه بعدی LOD مخلوط به دست می آیند. یعنی ما می توانیم یک مدل سه بعدی حاوی اشیاء در LOD های مختلف بدست آوریم. به عنوان قیاس با LOD وابسته به نمایش در گرافیک کامپیوتری [ 58 ، 59]، ما برنامه هایی را تصور می کنیم که در آن جزئیات بیشتری در مجاورت چیزی مورد علاقه در دسترس است. تجسم یک مثال واضح است، اما تحلیلهای فضایی، مانند شبیهسازی نویز، نیز جالب هستند: ساختمانهای نزدیکتر به منابع انتشار (مثلاً راهآهن یا کارخانه) جزئیات بیشتری خواهند داشت، و آنهایی که دورتر هستند، نمایشی درشتتر خواهند بود.
سوم، به ما اجازه میدهد تا LODهای میانی را استخراج کنیم، که ما را قادر میسازد تا پنج LOD سنتی CityGML را که ناکافی تلقی میشوند، اصلاح کنیم [ 60 ]، و LODهای پیوسته، یعنی LODها را در یک سطح دلخواه استخراج کنیم .
در آینده، ما قصد داریم عملیات های سطح بالا را برای دستکاری اشیاء 4 بعدی و همچنین پیاده سازی روش های مختلف برش برای استخراج اشیاء سه بعدی از یک پارتیشن فضایی 4 بعدی توسعه دهیم. سایر ویژگیهای اطلاعات جغرافیایی را میتوان بهعنوان ابعاد هندسی اضافی به روشی مشابه LOD مدلسازی کرد که زمان نمونهای بارز است. در حالی که اغلب ذکر شده است که ادغام مکان و زمان مطلوب است [ 61 ، 62 ، 63 ، 64 ، 65 ]، در عمل، به عنوان یک ویژگی جداگانه، یا یک شی یا یک رویداد، گنجانده شده است. مکعب فضا-زمان هویسمن و همکاران. [ 66] استفاده از زمان را بهعنوان یک بعد هندسی اضافی پیشنهاد میکند، اما هدف آن صرفاً ارائه بینش مکانی به جنبه زمانی است، نه تحقق ساختار دادهای برای مدیریت تغییرات در موقعیت، ویژگیها و/یا وسعت اشیا در یک واحد. پیوستار فضا-زمان ما قصد داریم در آینده چگونگی تحقق یکپارچگی فضا و زمان را بررسی کنیم. این نه تنها از تغییرات در لحظات گسسته پشتیبانی میکند، همانطور که در حال حاضر توسط اکثر مدلهای مکانی-زمانی از طریق مُهرهای زمانی و نسخهسازی پشتیبانی میشود، بلکه از تغییرات زمانی پیوسته برای توصیف حرکت یا تغییر اشیا بهطور مستقل از شناسایی شی آنها پشتیبانی میکند. چالش اصلی ما در به دست آوردن مجموعه داده هایی است که تاریخچه یک ساختمان یا منطقه خاص را منعکس می کند (به صورت سه بعدی). مدل های سه بعدی شهر در مراحل ابتدایی خود هستند و معمولاً اگر مدلی در دسترس باشد،
منابع
- بیلجکی، اف. لدوکس، اچ. استوتر، جی. ژائو، جی. رسمی سازی سطح جزئیات در مدل سازی سه بعدی شهر. محاسبه کنید. محیط زیست سیستم شهری 2014 ، 48 ، 1-15. [ Google Scholar ] [ CrossRef ]
- ژائو، جی. زو، س. دو، ز. فنگ، تی. ژانگ، ی. تعمیم مبتنی بر مورفولوژی ریاضی مدلهای ساختمان سه بعدی پیچیده که روابط معنایی را در بر میگیرد. ISPRS J. Photogramm. Remote Sens. 2012 ، 68 ، 95-111. [ Google Scholar ] [ CrossRef ]
- زو، س. ژائو، جی. لیو، ایکس. Zhang، Y. روش مکان یابی هندسی ابتدایی با هدایت ادراکی برای ساده سازی ساختمان های پیچیده سه بعدی. در مجموعه مقالات GeoWeb 2009 Academic Track – Cityscapes، ونکوور، کانادا، 27-31 ژوئیه 2009; صص 74-79.
- لوبکه، دی. ردی، ام. کوهن، جی دی. ورشنی، ع. واتسون، بی. Huebner, R. سطح جزئیات برای گرافیک سه بعدی . مورگان کافمن: سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 2003. [ Google Scholar ]
- OGC. استاندارد رمزگذاری زبان جغرافیایی شهر OGC (CityGML) . Open Geospatial Consortium Inc.: Wayland, MA, USA, 2012. [ Google Scholar ]
- گروگر، جی. Plümer, L. CityGML—مدل های شهری سه بعدی معنایی قابل تعامل. ISPRS J. Photogramm. Remote Sens. 2012 ، 71 ، 12-33. [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. لدوکس، اچ. Stoter, J. بهبود سازگاری مجموعه داده های چند-LOD CityGML با حذف افزونگی. یادداشت های سخنرانی سه بعدی علوم زمین اطلاعات در زمین اطلاعات و نقشه برداری ; Breunig, M., Mulhim, AD, Butwilowski, E., Kuper, PV, Benner, J., Häfele, KH, Eds.; انتشارات بین المللی Springer: دبی، امارات، 2015; صص 1-17. [ Google Scholar ]
- ژانگ، ایکس. آی، تی. استوتر، جی. ژائو، ایکس. تطبیق دادههای چند ضلعیهای ساختمانی در مقیاسهای چندگانه نقشه با اطلاعات متنی و آرامش بهبود یافته است. ISPRS J. Photogramm. Remote Sens. 2014 ، 92 ، 147-163. [ Google Scholar ] [ CrossRef ]
- ون اوستروم، پی. Stoter, J. مدلسازی دادههای 5 بعدی: ادغام کامل ابعاد فضای 2 بعدی/3 بعدی، زمان و مقیاس. در علم اطلاعات جغرافیایی: ششمین کنفرانس بین المللی، GIScience 2010، زوریخ، سوئیس، 14-17 سپتامبر 2010. مجموعه مقالات ; Springer: برلین/هایدلبرگ، آلمان، 2010; صص 311-324. [ Google Scholar ]
- آرویو اوهوری، ک. لدوکس، اچ. Stoter, J. ارزیابی و طبقه بندی ساختارهای داده توپولوژیکی nD برای نمایش اشیا در GIS با ابعاد بالاتر. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 825-849. [ Google Scholar ] [ CrossRef ]
- آرویو اوهوری، ک. بیلجکی، اف. استوتر، جی. Ledoux, H. دستکاری اطلاعات فضایی با ابعاد بالاتر. در مجموعه مقالات شانزدهمین کنفرانس بین المللی AGILE در علم اطلاعات جغرافیایی، لوون، بلژیک، 14 تا 17 مه 2013.
- استدلر، ا. Kolbe، TH انسجام فضایی- معنایی در ادغام مدل های شهر سه بعدی. در مجموعه مقالات پنجمین سمپوزیوم بین المللی WG II/7 کیفیت داده های مکانی ISSDQ 2007، Enschede، هلند، 13-15 ژوئن 2007.
- منگ، ال. فوربرگ، A. تعمیم ساختمان سه بعدی. در چالش های به تصویر کشیدن اطلاعات جغرافیایی: مسائل تعمیم و بازنمایی چند مقیاسی ; Mackaness, W., Ruas, A., Sarjakoski, T., Eds.; Elsevier Science: آمستردام، هلند، 2007; ص 211-232. [ Google Scholar ]
- فن، اچ. Meng, L. یک رویکرد سه مرحله ای برای ساده سازی ساختمان های سه بعدی مدل سازی شده توسط CityGML. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 1091-1107. [ Google Scholar ] [ CrossRef ]
- دولنر، جی. بوخهولز، اچ. مدلسازی مستمر سطح از جزئیات ساختمانها در مدلهای سه بعدی شهر. در پردازش های GIS 05 مجموعه مقالات سیزدهمین کارگاه بین المللی سالانه ACM در سیستم های اطلاعات جغرافیایی، برمن، آلمان، 31 اکتبر تا 05 نوامبر 2005. صص 173-181.
- مدلهای هندسی سلسله مراتبی کلارک، JH برای الگوریتمهای سطح مرئی. اشتراک. ACM 1976 ، 19 ، 547-554. [ Google Scholar ] [ CrossRef ]
- کورز، وی. Flick, S. ادغام سطوح جزئیات در یک 3D-GIS مبتنی بر وب. در مجموعه مقالات ششمین سمپوزیوم بین المللی ACM در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، واشنگتن، دی سی، ایالات متحده آمریکا، 6-7 نوامبر 1998. ص 40-45.
- گورکه، آر. گوتزلمن، تی. برنر، سی. Sester, M. تجمیع مدل های ساختمان LoD 1 به عنوان یک مسئله بهینه سازی. ISPRS J. Photogramm. Remote Sens. 2011 , 66 , 209-222. [ Google Scholar ] [ CrossRef ]
- ژائو، جی. چینگ، ز. دو، ز. فنگ، تی. ژانگ، ی. تعمیم مبتنی بر مورفولوژی ریاضی مدلهای ساختمان سه بعدی پیچیده که روابط معنایی را در بر میگیرد. ISPRS J. Photogramm. Remote Sens. 2012 ، 68 ، 95-111. [ Google Scholar ] [ CrossRef ]
- سمو، ا. تراپ، ام. کیپریانیدیس، ج. Döllner, J. تجسم تعاملی مدل های شهری سه بعدی مجازی تعمیم یافته با استفاده از انتقال سطح انتزاع. محاسبه کنید. نمودار انجمن 2012 ، 31 ، 885-894. [ Google Scholar ] [ CrossRef ]
- گلندر، تی. Döllner, J. نمایش های انتزاعی برای تجسم تعاملی مدل های شهر سه بعدی مجازی. محاسبه کنید. محیط زیست سیستم شهری 2009 ، 33 ، 375-387. [ Google Scholar ] [ CrossRef ]
- فیلو، WC; de Figueiredo، LH; گاتاس، ام. کاروالو، کامپیوتر یک ساختار داده توپولوژیکی برای زیربخش های مسطح سلسله مراتبی . گزارش فنی CS-95-53; گروه علوم کامپیوتر، دانشگاه واترلو: واترلو، کانادا، 1995. [ Google Scholar ]
- ریگو، پی. Scholl, M. پارتیشنهای چند مقیاسی: کاربرد در پایگاههای اطلاعاتی فضایی و آماری. در پیشرفت در پایگاه داده های فضایی ; Egenhofer, MJ, Herring, JR, Eds. Springer: برلین/هایدلبرگ، آلمان، 1995; جلد 951، ص 170-183. [ Google Scholar ]
- پلومر، ال. Gröger, G. دستیابی به یکپارچگی در سیستم های اطلاعات جغرافیایی – نقشه ها و نقشه های تو در تو. GeoInformatica 1997 ، 1 ، 345-367. [ Google Scholar ] [ CrossRef ]
- Van Oosterom، P. ساختارهای داده توپولوژیکی در مقیاس متغیر مناسب برای انتقال پیشرونده داده: درخت GAP-face و جنگل لبه GAP. کارتوگر. Geogr. Inf. علمی 2005 ، 32 ، 331-346. [ Google Scholar ] [ CrossRef ]
- Weibel, R. تعمیم داده های مکانی: اصول و الگوریتم های انتخاب شده. در مبانی الگوریتمی سیستم های اطلاعات جغرافیایی ; Van Kreveld, M., Nievergelt, J., Roos, T., Widmayer, P., Eds. Springer: برلین/هایدلبرگ، آلمان، 1997; جلد 1340، صص 99–152. [ Google Scholar ]
- هامپ، ام. Anders, KH; برنامه های Sester، M. MRDB برای بازنگری داده ها و تعمیم بلادرنگ. در مجموعه مقالات بیست و یکمین کنفرانس بین المللی کارتوگرافی، دوربان، آفریقای جنوبی، 10-16 اوت 2003. صص 192-202.
- Veltkamp، RC; Hagedoorn، M. وضعیت هنر در تطبیق شکل. در اصول بازیابی اطلاعات بصری ; Springer London: لندن، انگلستان، 2001; صص 87-119. [ Google Scholar ]
- دووگل، تی. ترویسان، جی. Raynal، L. ساخت یک پایگاه داده چند مقیاسی با روابط مقیاس – انتقال. در مجموعه مقالات هفتمین سمپوزیوم بین المللی در مورد مدیریت داده های فضایی، دلفت، هلند، 12-16 اوت 1996. صص 337-351.
- Van Oosterom، PJM; Meijers, M. ساختارهای داده در مقیاس Vario که از زوم صاف و انتقال پیشرونده داده های دو بعدی و سه بعدی پشتیبانی می کنند. بین المللی جی جئوگر. Inf. علمی 2014 ، 28 ، 455-478. [ Google Scholar ] [ CrossRef ]
- میسون، NC; O’Conaill، MA; بل، SBM مدیریت داده های جغرافیایی چهار بعدی در GIS محیطی. بین المللی جی. جئوگر. Inf. سیستم 1994 ، 8 ، 191-215. [ Google Scholar ] [ CrossRef ]
- برنارد، ال. اشمیت، بی. Streit، U. AtmoGIS – ادغام مدلهای جوی و GIS. در مجموعه مقالات هشتمین سمپوزیوم بین المللی در مورد مدیریت داده های فضایی، ونکوور، کانادا، 11-15 ژوئیه 1998.
- صامت، ح. Tamminen، M. Bintrees، درختان CSG، و زمان. در مجموعه مقالات دوازدهمین کنفرانس سالانه گرافیک کامپیوتری و تکنیکهای تعاملی، SIGGRAPH ’85، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 22 تا 26 ژوئیه 1985. صص 121-130.
- وارما، اچ. بودرو، اچ. Prime, W. ساختار داده ای برای پایگاه های داده مکانی-زمانی. بین المللی هیدروگر Rev. 1990 , 67 , 71-92. [ Google Scholar ]
- OGC. OpenGIS Implementation Specification for Geographic Information-Simple Feature Access-Part 1: Common Architecture , 1.2.1 ed.; کنسرسیوم فضایی باز: Herndon، VA، ایالات متحده آمریکا، 2011. [ Google Scholar ]
- Rossignac، J.; O’Connor، M. SGC: مدلی مستقل از بعد برای نقاط با ساختارهای داخلی و مرزهای ناقص. در مجموعه مقالات کارگاه IFIP در CAD/CAM، Rensselaerville، NY، ایالات متحده، 17-21 ژوئن 1989. صص 145-180.
- ماسودا، اچ. عملگرهای توپولوژیکی و عملیات بولی برای مدلهای هندسی غیر منیفولد مبتنی بر پیچیده. محاسبه کنید. به دس کمک کرد. 1993 ، 25 ، 119-129. [ Google Scholar ] [ CrossRef ]
- سوهان پناه، سی. بسط یک تکنیک نمایش مرزی برای توصیف پلی توپ های n بعدی. محاسبه کنید. نمودار 1989 ، 13 ، 17-23. [ Google Scholar ] [ CrossRef ]
- ESRI. توپولوژی GIS ; ESRI: Redlands، CA، USA، 2005. [ Google Scholar ]
- Mäntylä, M. An Introduction to Solid Modeling ; انتشارات علوم کامپیوتر: نیویورک، نیویورک، ایالات متحده آمریکا، 1988. [ Google Scholar ]
- د فلوریانی، ال. Hui, A. ساختارهای داده برای مجتمع های ساده: تجزیه و تحلیل و مقایسه. در سمپوزیوم Eurographics در مورد پردازش هندسه ; Desbrunn, M., Pottmann, H., Eds. انجمن یوروگرافیک: وین، اتریش، 2005. [ Google Scholar ]
- الگوریتمهای Swechuk، JR Sweep برای ساخت مثلثهای delaunay محدود با ابعاد بالاتر. در مجموعه مقالات شانزدهمین سمپوزیوم سالانه هندسه محاسباتی، هنگ کنگ، چین، 12 تا 14 ژوئن 2000. صص 350-359.
- Shewchuk، JR دلونای مقید با ابعاد عمومی و مثلث های منظم محدود، I: خواص ترکیبی. گسسته. محاسبه کنید. Geom. 2008 ، 39 ، 580-637. [ Google Scholar ] [ CrossRef ]
- Lienhardt، P. نقشه های ترکیبی تعمیم یافته N بعدی و شبه منیفولدهای سلولی. بین المللی جی. کامپیوتر. Geom. Appl. 1994 ، 4 ، 275-324. [ Google Scholar ] [ CrossRef ]
- Brisson، E. نمایش ساختارهای هندسی در ابعاد d: توپولوژی و نظم. گسسته. محاسبه کنید. Geom. 1993 ، 9 ، 387-426. [ Google Scholar ] [ CrossRef ]
- پودرت، م. آرنولد، آ. برتراند، ی. Lienhardt, P. Cartes Combinatoires Ouvertes ; گزارش فنی 2007-01; Laboratoire SIC، UFR SFA، Université de Poitiers: Poiters، فرانسه، 2007. [ Google Scholar ]
- کریمر، پی. Untereiner، L. جوند، تی. تری، اس. Cazier, D. CGoGN: مش های N بعدی با نقشه های ترکیبی. در مجموعه مقالات بیست و دومین میزگرد مشبک بین المللی، اورلاندو، فلوریدا، ایالات متحده آمریکا، 13 تا 16 اکتبر 2013. صص 485-503.
- آرویو اوهوری، ک. Ledoux, H. استفاده از اکستروژن برای تولید مجموعه داده های GIS با ابعاد بالاتر. در مجموعه مقالات بیست و یکمین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، اورلاندو، فلوریدا، ایالات متحده آمریکا، 5 تا 8 نوامبر 2013. صص 398-401.
- آرویو اوهوری، ک. لدوکس، اچ. Stoter, J. یک الگوریتم اکستروژن مستقل از بعد با استفاده از نقشه های تعمیم یافته. بین المللی جی. جئوگر. Inf. علمی 2015 ، 17 ، 32-46. [ Google Scholar ]
- آرویو اوهوری، ک. دامیاند، جی. لدوکس، اچ. ساخت یک مجتمع سلولی n بعدی از سوپی از صورت های (n-1) -بعدی. در ICAA 2014 ؛ Gupta, P., Zaroliagis, C., Eds. Springer International Publishing Switzerland: Colkata، هند، 2014; جلد 8321، ص 36–47. [ Google Scholar ]
- گوسلین، اس. دامیاند، جی. سولنون، سی. جستجوی کارآمد نقشه های ترکیبی با استفاده از امضا. نظریه. محاسبه کنید. علمی 2011 ، 412 ، 1392-1405. [ Google Scholar ] [ CrossRef ]
- Eppstein, D. ایزومورفیسم زیرگراف در نمودارهای مسطح و مسائل مرتبط. جی.گر. الگوریتم های کاربردی 1999 ، 3 ، 1-27. [ Google Scholar ] [ CrossRef ]
- رابنر، ی. توماسی، سی. Guibas, LJ معیاری برای توزیع با برنامه های کاربردی در پایگاه داده های تصویر. در مجموعه مقالات ششمین کنفرانس بین المللی بینایی کامپیوتر، بمبئی، هند، 4 تا 7 ژانویه 1998. صص 59-66.
- گرانادوس، ام. هاچنبرگر، پی. هرت، اس. کتنر، ال. مهلهورن، ک. Seel، M. Boolean عملیات روی مجتمعهای انتخابی سه بعدی Nef: ساختار داده، الگوریتمها و پیادهسازی. در مجموعه مقالات یازدهمین سمپوزیوم سالانه اروپایی در مورد الگوریتم ها (ESA’03)، بوداپست، مجارستان، 15 تا 20 سپتامبر 2003. صص 654-666.
- Hachenberger, P. Boolean Operations on 3D Selective Nef Complexes Structure داده ها، الگوریتم ها، پیاده سازی بهینه، آزمایش ها و کاربردها. Ph.D. پایان نامه، دانشگاه زارلند، زاربروکن، آلمان، 1 دسامبر 2006. [ Google Scholar ]
- دامیاند، جی. Lienhardt، P. حذف و انقباض برای نقشه های تعمیم یافته n بعدی. در مجموعه مقالات یازدهمین هندسه گسسته برای تصاویر کامپیوتری، ناپل، ایتالیا، 19 تا 21 نوامبر 2003. جلد 2886، ص 408-419.
- گروگر، جی. Plümer, L. قوانین تراکنش صحیح و کامل برای به روز رسانی مدل های سه بعدی شهر. Geoinformatica 2011 ، 16 ، 131-164. [ Google Scholar ] [ CrossRef ]
- Hoppe, H. پالایش مشهای پیشرونده وابسته به نمایش. در مجموعه مقالات SIGGRAPH’97، لس آنجلس، کالیفرنیا، ایالات متحده آمریکا، 3 تا 8 اوت 1997; ص 189-198.
- دی برگ، ام. Dobrindt، KTG در سطوح جزئیات در زمین. گر مدل. تصویر روند. 1998 ، 60 ، 1-12. [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. لدوکس، اچ. Stoter, J. تعریف مجدد سطح جزئیات برای مدل های سه بعدی. GIM Int. 2014 ، 28 ، 21-23. [ Google Scholar ]
- هورنسبی، ک. Egenhofer، MJ تغییر مبتنی بر هویت: پایه ای برای بازنمایی دانش مکانی-زمانی. بین المللی جی. جئوگر. Inf. علمی 2000 ، 14 ، 207-224. [ Google Scholar ] [ CrossRef ]
- Peuquet، DJ Representations of Space and Time ; Guilford Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2002. [ Google Scholar ]
- رپر، جی. لیوینگستون، دی. بیایید واقعی شویم: هویت مکانی-زمانی و موجودیت های جغرافیایی. ترانس. Inst. برادر Geogr. 2001 ، 26 ، 237-242. [ Google Scholar ] [ CrossRef ]
- Worboys، MF یک مدل واحد برای اطلاعات مکانی و زمانی. محاسبه کنید. J. 1994 , 37 , 26-34. [ Google Scholar ] [ CrossRef ]
- د رو، بی. ون د وگه، ن. بورژوا، ج. de Maeyer, P. بعد زمانی در یک مدل داده های باستان شناسی 4 بعدی: کاربرد استاندارد اطلاعات جغرافیایی. در مجموعه مقالات هشتمین کنفرانس 3DGeoInfo و کارگاه WG II/2، استانبول، ترکیه، 27-29 نوامبر 2013.
- هویسمن، او. سانتیاگو، IF; کراک، ام جی. Retsios، B. توسعه یک محیط تجزیه و تحلیل ژئو بصری برای بررسی رویدادهای باستان شناسی: گسترش مکعب فضا-زمان. کارتوگر. Geogr. Inf. علمی 2013 ، 36 ، 225-236. [ Google Scholar ] [ CrossRef ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر