

خلاصه
تعیین روابط فضایی بین اشیاء یکی از وظایف اصلی یک سیستم اطلاعات جغرافیایی (GIS) است. یکی از جنبه های مهم روابط فضایی، روابط توپولوژیکی است که تحت تحولات توپولوژیکی ثابت می ماند. توصیف هندسه یک شی فضایی با استفاده از OpenGIS Simple Features Specification فقط به ویژگی های ساده نیاز دارد: داخل، مرز و بیرون یک شی فضایی تعریف شده است. این مقاله یک مدل جامع، مدل 27 تقاطع (27IM) پیشنهاد میکند که هم ابعاد و هم تعداد تقاطعها را در نظر میگیرد. برخی از پیشنهادات برای حذف روابطی ارائه شده است که 27IM نمی تواند آنها را اجرا کند. 27IM شش گروه از روابط توپولوژیکی را توصیف می کند: نقطه / نقطه، نقطه / خط، نقطه / منطقه، خط / خط، خط / منطقه و منطقه / منطقه. فرمالیسم 27IM و تفاسیر هندسی متناظر بین اشیاء فضایی نشان داده شده و سپس با روابط توپولوژیکی ارائه شده توسط مدلهای موجود، مدل نه تقاطع (9IM)، ماتریس نه تقاطع با ابعاد گسترده (DE-9IM) مقایسه میشود. و عدد جداسازی توسعه یافته ماتریس نه تقاطع (SNE-9IM). نتایج نشان می دهد که (1) 27IM می تواند روابط توپولوژیکی بین اشیاء فضایی دو بعدی را نشان دهد، (2) 27IM می تواند روابط توپولوژیکی بیشتری را نسبت به 9IM، DE-9IM یا SNE-9IM تشخیص دهد و (3) قابلیت همکاری 27IM با 9IM، DE-9IM و SNE-9IM خوب است. مدل نه تقاطع (9IM)، ماتریس نه تقاطع با ابعاد گسترده (DE-9IM) و ماتریس نه تقاطع توسعه یافته عدد جدایی (SNE-9IM). نتایج نشان می دهد که (1) 27IM می تواند روابط توپولوژیکی بین اشیاء فضایی دو بعدی را نشان دهد، (2) 27IM می تواند روابط توپولوژیکی بیشتری را نسبت به 9IM، DE-9IM یا SNE-9IM تشخیص دهد و (3) قابلیت همکاری 27IM با 9IM، DE-9IM و SNE-9IM خوب است. مدل نه تقاطع (9IM)، ماتریس نه تقاطع با ابعاد گسترده (DE-9IM) و ماتریس نه تقاطع توسعه یافته عدد جدایی (SNE-9IM). نتایج نشان می دهد که (1) 27IM می تواند روابط توپولوژیکی بین اشیاء فضایی دو بعدی را نشان دهد، (2) 27IM می تواند روابط توپولوژیکی بیشتری را نسبت به 9IM، DE-9IM یا SNE-9IM تشخیص دهد و (3) قابلیت همکاری 27IM با 9IM، DE-9IM و SNE-9IM خوب است.
کلید واژه ها:
رابطه توپولوژیکی ; 27IM ; بعد ؛ جدایش، جدایی
1. معرفی
روابط فضایی بین موجودات فضایی به اندازه خود موجودیت ها مهم است [ 1 ]. یک رابطه فضایی مشخص می کند که چگونه یک شی در ارتباط با برخی از شی مرجع در فضا قرار می گیرد. روابط توپولوژیکی، روابط فاصله و روابط جهت گیری از انواع روابط فضایی معمول استفاده می شود. وقتی با فضاهای اقلیدسی، متریک و برداری مقایسه می شود، ویژگی های توپولوژیکی در زبان فضایی و شناخت فضایی اساسی ترین هستند [ 2 ، 3 ، 4] .]. روابط توپولوژیکی زمانی که فضای مختصات تغییر شکل میدهد، مانند پیچش یا کشش، ثابت میماند. در نتیجه، روابط توپولوژیکی اشیاء فضایی معمولاً در GIS استفاده می شود. سوالات ساده مانند “کدام دانشگاه ها در این شهر قرار دارند؟” یا “آیا این دو قطعه زمین از هم جدا هستند؟” به طور گسترده به آنها پرداخته می شود، در حالی که سوالات پیچیده تری مانند “چند بار رودخانه از مرز این ایالت عبور می کند؟” و “بعد این تقاطع ها چیست؟” نیاز به تحلیل بیشتری دارد.
مطالعات قبلی رسمی سازی روابط توپولوژیکی، مانند منطق زمانی مبتنی بر بازه [ 5 ، 6 ]، توپولوژی مجموعه نقطه [ 1 ، 7 ، 8 ، 9 ] و حساب ارتباط منطقه (RCC) را بررسی کرده اند [ 10 ، 11 ، 12 ، 13 ، 14 ، 15 ]. در محدوده این مقاله، از توپولوژی مجموعه نقطه، که مطالعه ماهیت انتزاعی کلی پیوستگی یا پیوستگی فضاها است، برای بحث در مورد رسمی شدن روابط توپولوژیکی استفاده شده است.
در طول سه دهه گذشته، تحقیقاتی برای رسمی کردن روابط توپولوژیکی بر اساس توپولوژی مجموعه نقطه انجام شده است، و مدل چهار تقاطع (4IM) [7]، مدل نه تقاطع (9IM) [ 8 ]، مبتنی بر Voronoi مدل نه تقاطع [ 1 ]، مدل تقاطع و تفاوت [ 16 ]، یک مدل توسعه یافته به صورت ماتریس 4×4 [ 17 ]، مدل تقاطع 9 + [ 18 ]، مدل تقاطع و تفاوت نامشخص [ 19 ] و مدلهای چهار تقاطع خط مستقیم دوگانه [ 20] پیشنهاد شده است. همه مدل های فوق محتوای ثابت (یعنی خالی بودن یا نبودن) تقاطع ها را در نظر می گیرند. 4IM و 9IM در روابط فضایی مقایسه شدند و نتیجه این بود که 9IM با محتوای ثابت جزئیات بیشتری را نسبت به 4IM ارائه می دهد [ 9 ]. یک طبقه بندی کامل از روابط فضایی با استفاده از مدل نه تقاطع مبتنی بر Voronoi نشان داده شد [ 21 ]. روابط توپولوژیکی برای صحنه فضایی [ 22 ، 23 ] و اشیاء فضایی مرکب [ 24 ] نیز ارائه شد. ما میتوانیم نتیجه بگیریم که مدلهای 4IM و 9IM و همچنین مدلهای توسعهیافته بر اساس آنها به طور گسترده مورد مطالعه قرار گرفتهاند.
علاوه بر محتوای ثابت، از متغیرهای توپولوژیکی دیگر برای توصیف بیشتر جزئیات روابط توپولوژیکی استفاده شده است. اصلاحات زیادی برای تقاطع های خالی/غیر خالی پیشنهاد شده است. به عنوان مثال، بعد تقاطع ها [ 25 ]، تعداد جدایی ها در تقاطع ها [ 26 ]، چهار متغیر ثابت، از جمله بعد اجزا، انواع آنها، روابط آنها با توجه به همسایگی بیرونی و توالی اجزا [27] . ]، سه متغیر ثابت، از جمله توالی تقاطع، نوع تقاطع و حس همخطی برای خطوط [ 28 ] و مجموعه ای از متغیرهای توپولوژیکی سلسله مراتبی، از جمله محتوا، شماره جداسازی، بعد، نوع عنصر و دنباله [28].16 ]، پیشنهاد شده است. این روشها اصلاحات 4IM و 9IM موجود هستند و میتوانند هر زمان که لازم باشد جزئیات روابط توپولوژیکی بیشتری را نشان دهند.
در سالهای اخیر، روابط توپولوژیکی حاصل از اصلاحات متریک در ادبیات GIS مورد بحث قرار گرفته است، مانند نسبتهای تقسیم و معیارهای نزدیکی [ 29 ]، تقسیم، نزدیکی و همسویی تقریبی برای روابط خط-منطقه [ 30 ] و سه معیار محتوایی برای توصیف پیکربندیهای فضایی. [ 31 ]. علاوه بر این، 9IM با گرفتن جزئیات متریک برای روابط خط خط از طریق نسبت های تقسیم و اندازه گیری های نزدیکی [ 32 ]، و مجموعه ای جامع از یازده اصلاح متریک [ 33 ]، یک تفسیر مبتنی بر فاصله برای mereotopology [ 34 ] و بسط گسترش یافته است. نزدیکی و نزدیکی انقباضی [ 35] در چند سال گذشته مورد بررسی قرار گرفته است. پالایش های متریک اصلاح مدل تقاطع هستند و می توانند اطلاعات بیشتری را برای روابط توپولوژیکی فراهم کنند. پالایشهای متریک محدودهای از مقادیر را نشان میدهند که با هم یک رابطه توپولوژیکی را ادعا میکنند.
دامنه این مقاله شامل تعریف فرمالیسم (مدل) برای توصیف روابط توپولوژیکی اجسام فضایی تعبیه شده در صفحه است. برای توصیف جزئیات روابط توپولوژیکی، یک مدل جامع برای روابط فضایی توپولوژیکی پیشنهاد شدهاست و دو متغیر توپولوژیکی در نظر گرفته میشوند: (1) بعد تقاطعها و (2) تعداد جداییها.
بقیه این مقاله مدل جامع پیشنهادی را برای روابط فضایی توپولوژیکی ارائه میکند که برای مشخص کردن ابعاد و تعداد جداییها استفاده میشود. بخش 2 مدل را معرفی می کند. بخش 3 شش گروه از روابط توپولوژیکی توصیف شده توسط 27IM را توصیف می کند. بخش 4 پالایش و قابلیت همکاری 27IM را مورد بحث قرار می دهد و بخش 5 نتیجه گیری را ارائه می دهد و کار آینده را مورد بحث قرار می دهد.
2. روش ها
2.1. مدل داده های مکانی
برای توصیف هندسه اشیاء فضایی، بسیاری از مدلهای داده فضایی، مانند مجتمع ساده [ 36 ]، ساختار دادههای رسمی سهبعدی [ 37 ]، شبکه چهار وجهی [ 38 ، 39 ]، مجموعه سلولی [ 40 ، 41 ] ، مدل شی هندسی [ 42 ]، مدل فضایی ساده شده [ 43 ]، مدل چند سطحی [ 44 ]، مدل داده های ترکیبی [ 45 ]، مدل اطلاعات رایج [ 46 ] و مدل جبر هندسی [ 47 ، 48]]، پیشنهاد شده است. به طور کلی، این مدل ها چهار انتزاع هندسی یک شی واقعی را حفظ می کنند: نقطه، خط، سطح و بدن. تفاوت بین این مدل ها در اجزای شی فضایی و نحوه سازماندهی آنها نهفته است. مدل شی هندسی تعریف شده توسط OpenGIS Simple Features Specification به طور گسترده برای اشیاء فضایی دو بعدی پذیرفته شده است. در این مقاله، تعریف اجسام فضایی در فضای دو بعدی به مشخصات ویژگیهای ساده OpenGIS اشاره دارد.
نظریه مجموعه نقطه ای چارچوبی برای مدل سازی تقاطع دو شی فضایی فراهم می کند. هر شی فضایی با ویژگی های فضایی زیر مشخص می شود: یک درون، یک مرز و یک بیرون. تعاریف داخلی، مرز و بیرون در زیر [ 49 ] آورده شده است.
تعریف 1:
فرض کنید A زیرمجموعه ای از فضای توپولوژیکی X باشد. فضای داخلی A، اتحاد همه مجموعه های باز موجود در A است. بسته شدن A محل تلاقی همه مجموعه های بسته حاوی A است.
تعریف 2:
فرض کنید A زیرمجموعه ای از فضای توپولوژیکی X باشد. مرز A مجموعه ای از بسته شدن A منهای داخلی A است.
تعریف 3
فرض کنید A زیرمجموعه ای از فضای توپولوژیکی X باشد . نمای خارجی A مجموعه ای از X منهای بسته شدن A است.
بر اساس مشخصات OpenGIS Simple Features Specification و توپولوژی جبری، تعاریف و داخلی، مرز و بیرون نقطه، خط و منطقه به صورت زیر آورده شده است ( شکل 1 ).
یک نقطه یک هندسه صفر بعدی است و یک مکان واحد را در فضای مختصات نشان می دهد ( شکل 1 a). باطن یک نقطه یک نقطه است; مرز یک نقطه یک مجموعه خالی است. و ظاهر یک نقطه شامل هر چیزی است که نقطه نیست.
خط یک جسم هندسی یک بعدی است که معمولاً به صورت دنباله ای از نقاط با درونیابی خطی بین نقاط ذخیره می شود ( شکل 1 ب). یک خط هرگز از یک نقطه دو بار عبور نمی کند. داخل یک خط، خطی است بدون نقاط انتهایی آن. مرز یک خط دو نقطه انتهایی آن است. و قسمت بیرونی یک خط مجموعه ای از نقاط است که شامل خط نیست.
یک منطقه یک جسم هندسی دو بعدی بسته است که توسط یک مرز بیرونی تعریف شده است ( شکل 1 ج). داخل منطقه مجموعه ای از نقاط داخل مرز است. مرز یک منطقه خطوطی است که مرز را تشکیل می دهند و نمای بیرونی یک منطقه مجموعه ای از نقاط است که منطقه را شامل نمی شود.
با توجه به ابعاد اجسام فضایی، شش گروه روابط توپولوژیکی وجود دارد: نقطه/نقطه، نقطه/خط، نقطه/منطقه، خط/خط، خط/منطقه و روابط منطقه/منطقه که شرح داده خواهد شد.
2.2. متغیرهای توپولوژیکی مختلف برای روابط توپولوژیکی
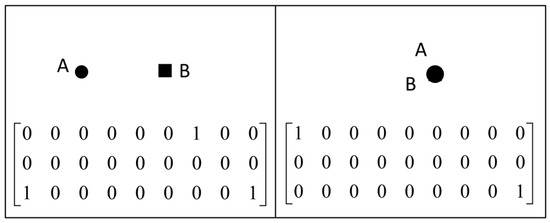
روابط توپولوژیکی بین دو جسم فضایی A و B بر اساس تقاطع داخلی، مرز و بیرون A با داخل، مرز و بیرون B است. نه تقاطع بین A و B را می توان با یک رابطه توپولوژیکی با استفاده از یک ماتریس 3×3 توصیف کرد. محتوا، ابعاد و تعداد متغیرهای جداسازی برای توصیف روابط توپولوژیکی استفاده می شود. با در نظر گرفتن اشیاء فضایی در شکل 2 به عنوان مثال، روابط توپولوژیکی آنها را می توان با دنبال کردن مدل های روابط توپولوژیکی توصیف کرد.
یک ماتریس 3 × 3 با مقادیر خالی و غیر خالی با رابطه (1) نشان داده می شود. باطن A، مرز A، خارجی A، باطن B، مرز B و بیرون B با نشان داده می شوند .آoآ�، ∂ A∂آ، آ–آ–، بoب�، ∂ B∂بو ب–ب–، به ترتیب. با در نظر گرفتن مقادیر خالی و غیر خالی، 512 (512 = 2 9 ) روابط توپولوژیکی باینری را می توان در تئوری تشخیص داد. با این حال، همه روابط توپولوژیکی باینری 512 را نمی توان پیاده سازی کرد. 9IM می تواند 33 رابطه بین دو خط ساده، 19 رابطه بین یک خط ساده و یک منطقه و 8 رابطه بین دو منطقه ساده را تشخیص دهد [ 8 ]. مقدار تقاطع در معادله (1) را می توان از {0، 1} ترسیم کرد، که در آن 0 به این معنی است که تقاطع صفر است و 1 نشان دهنده این است که تقاطع صفر نیست،
آر9 منم( الف ، ب ) =⎡⎣⎢آo∩بo∂ A ∩بoآ–∩بoآo∩ ∂ B∂ A ∩ ∂ Bآ–∩ ∂ Bآo∩ب–∂ A ∩ب–آ–∩ب–⎤⎦⎥آر9منم(آ،ب)=[آ�∩ب�آ�∩∂بآ�∩ب–∂آ∩ب�∂آ∩∂ب∂آ∩ب–آ–∩ب�آ–∩∂بآ–∩ب–]
بر اساس 9IM، روابط توپولوژیکی بین A و B در زیر توضیح داده شده است. فرمالیسم روابط توپولوژیکی در شکل 2 a-c که توسط 9IM بیان شده است، همگی یکسان هستند. به عبارت دیگر، تمام روابط توپولوژیکی در شکل 2 a-c را می توان به صورت زیر توصیف کرد:
آر9 منم( الف ، ب ) =⎡⎣⎢111011001⎤⎦⎥آر9منم(آ،ب)=[100110111]
یک ماتریس نه تقاطع با ابعاد گسترده (DE-9IM) با معادله (3) نشان داده شده است. متغیر ابعاد برای تشخیص بعد تقاطع استفاده می شود و بالاتر از پایین ترین بعد دو شی فضایی نیست. بنابراین، بزرگترین مقدار ابعاد تقاطع 2 بین نقاط ساده، خطوط و مناطق است. اگر تقاطع خالی باشد، بعد تقاطع 1- است. بعد یک تقاطع غیر خالی حداکثر ابعاد تقاطع در نظر گرفته می شود. به عنوان مثال، اگر تقاطع ها دارای هر دو نقطه و خطوط باشند، بعد تقاطع بر روی 1 تنظیم می شود. با توجه به ابعاد تقاطع ها، 262144 (262،144 = 4 9)) روابط توپولوژیکی را می توان در تئوری تشخیص داد. با این حال، همه 262144 روابط توپولوژیکی قابل پیاده سازی نیستند و برخی از روابط توپولوژیکی اهمیت عملی ندارند.
آرD E– 9 منم( الف ، ب ) =⎡⎣⎢کم نور (آo∩بo)کم نور ( ∂ A ∩بo)کم نور (آ–∩بo)کم نور (آo∩ ∂ B )کم نور ( ∂ A ∩ ∂ B )کم نور (آ–∩ ∂ B )کم نور (آo∩ب–)کم نور ( ∂ A ∩ب–)کم نور (آ–∩ب–)⎤⎦⎥آردی�–9منم(آ،ب)=[کم نور(آ�∩ب�)کم نور(آ�∩∂ب)کم نور(آ�∩ب–)کم نور(∂آ∩ب�)کم نور(∂آ∩∂ب)کم نور(∂آ∩ب–)کم نور(آ–∩ب�)کم نور(آ–∩∂ب)کم نور(آ–∩ب–)]
بر اساس DE-9IM، روابط توپولوژیکی بین A و B در زیر توضیح داده شده است. فرمالیسم روابط توپولوژیکی در شکل 2 a,c بیان شده توسط DE-9IM یکسان است (معادله (4))، در حالی که فرمالیسم روابط توپولوژیکی در شکل 2 b (معادله (5)) با شکل 2 متفاوت است. الف، ج در مقایسه با 9IM، DE-9IM نه تنها می تواند متقاطع دو مجموعه را تشخیص دهد، بلکه می تواند ابعاد تقاطع ها را نیز تشخیص دهد:
آرD E– 9 منم( الف ، ب ) =⎡⎣⎢212– 101– 1– 12⎤⎦⎥���−9��(�,�)=[2−1−110–1212]
آرD E– 9 منم( الف ، ب ) =⎡⎣⎢212– 111– 1– 12⎤⎦⎥آردی�–9منم(آ،ب)=[2–1–111–1212]
مخفف یک ماتریس 3×3 که تعداد جداسازی ها را نشان می دهد، ماتریس نه تقاطع توسعه یافته عدد جدایی (SNE-9IM) با معادله (6) نشان داده می شود. تعداد جداسازی ها برای بیان تعداد اجزای متصل استفاده می شود. اندازه گیری برای جداسازی، تغییر توپولوژیکی مشخصه اویلر-پوانکار [ 26 ] است، اما مقدار ممکن است منفی باشد. تعداد تفکیک ها به عنوان یک عدد مثبت در این مطالعه تعریف شده است. از آنجایی که تعداد جداسازی ها می تواند هر عدد صحیح بزرگتر یا مساوی 0 باشد، در تئوری، SNE-9IM می تواند روابط توپولوژیکی بیشماری را تشخیص دهد:
آراسنE– 9 منم=⎡⎣⎢χ (آo∩بo)χ ( ∂ A ∩بo)χ (آ–∩بo)χ (آo∩ ∂ B )χ ( ∂ A ∩ ∂ B )χ (آ–∩ ∂ B )χ (آo∩ب–)χ ( ∂ A ∩ب–)χ (آ–∩ب–)⎤⎦⎥آراسن�–9منم=[�(آ�∩ب�)�(آ�∩∂ب)�(آ�∩ب–)�(∂آ∩ب�)�(∂آ∩∂ب)�(∂آ∩ب–)�(آ–∩ب�)�(آ–∩∂ب)�(آ–∩ب–)]
بر اساس SNE-9IM، روابط توپولوژیکی بین A و B در زیر توضیح داده شده است. فرمالیسم روابط توپولوژیکی در شکل 2 a,b بیان شده توسط SNE-9IM یکسان است (معادله (7))، در حالی که فرمالیسم روابط توپولوژیکی در شکل 2 c (معادله (8)) متفاوت از شکل است. 2 الف، ب. در مقایسه با 9IM، SNE-9IM نه تنها می تواند متقاطع دو مجموعه را تشخیص دهد، بلکه می تواند تعداد جداسازی ها را نیز تشخیص دهد.
آراسنE– 9 منم( الف _ب ) =⎡⎣⎢111011001⎤⎦⎥آراسن�–9منم(آ،ب)=[100110111]
آراسنE– 9منم( الف ، ب ) =⎡⎣⎢111021001⎤⎦⎥آراسن�–9منم(آ،ب)=[100120111]
2.3. مدلی جامع برای روابط توپولوژیکی
در مدل جامع پیشنهادی هم ابعاد و هم تعداد جداسازی ها در نظر گرفته شده است. این مدل جامع روابط فضایی توپولوژیکی بین دو شی فضایی A و B را بر اساس در نظر گرفتن تعداد جداییهای داخلی، مرزها و بیرونی A و B در هر بعد نشان میدهد. چارچوب این مدل جامع مجموعه مرتب شده از 27 تقاطع است که مدل 27 تقاطع نامیده می شود (27IM) که به طور خلاصه به عنوان یک ماتریس 9 × 3 نشان داده شده است (معادله (9)).
آر27 منم( الف ، ب ) =⎡⎣⎢χ0 ، 1 ، 2(آo∩بo)χ0 ، 1 ، 2( ∂ A ∩بo)χ0 ، 1 ، 2(آ–∩بo)χ0 ، 1 ، 2(آo∩ ∂ B )χ0 ، 1 ، 2( ∂ A ∩ ∂ B )χ0 ، 1 ، 2(آ–∩ ∂ B )χ0 ، 1 ، 2(آo∩ب–)χ0 ، 1 ، 2( ∂ A ∩ب–)χ0 ، 1 ، 2(آ–∩ب–)⎤⎦⎥آر27منم(آ،ب)=[�0،1،2(آ�∩ب�)�0،1،2(آ�∩∂ب)�0،1،2(آ�∩ب–)�0،1،2(∂آ∩ب�)�0،1،2(∂آ∩∂ب)�0،1،2(∂آ∩ب–)�0،1،2(آ–∩ب�)�0،1،2(آ–∩∂ب)�0،1،2(آ–∩ب–)]
هر عضو در معادله (9) شامل سه تقاطع است، به عنوان مثال: χ0 ، 1 ، 2(آo∩بo)�0،1،2(آ�∩ب�)نشان دهنده تقاطع χ0(آo∩بo)�0(آ�∩ب�)، χ1(آo∩بo)�1(آ�∩ب�)و χ2(آo∩بo)�2(آ�∩ب�). اینجا، χ0(آo∩بo)�0(آ�∩ب�)، χ1(آo∩بo)�1(آ�∩ب�)و χ2(آo∩بo)�2(آ�∩ب�)به طور جداگانه تعداد جداسازی ها را در ابعاد 0، 1 بعد و 2 بعد نشان می دهد. معادله (9) را می توان به صورت بیست و هفت تایی نیز نشان داد، یعنی: χ0(آo∩بo)�0(آ�∩ب�)، χ1(آo∩بo)�1(آ�∩ب�)، χ2(آo∩بo)�2(آ�∩ب�)، χ0(آo∩ ∂ B )�0(آ�∩∂ب)، χ1(آo∩ ∂ B )�1(آ�∩∂ب)، χ2(آo∩ ∂ B )�2(آ�∩∂ب)، χ0(آo∩ب–)�0(آ�∩ب–)، χ1(آo∩ب–)�1(آ�∩ب–)، χ2(آo∩ب–)�2(آ�∩ب–)، χ0( ∂ A ∩بo)�0(∂آ∩ب�)، χ1( ∂ A ∩بo)�1(∂آ∩ب�)، χ2( ∂ A ∩بo)�2(∂آ∩ب�)، χ0( ∂ A ∩ ∂ B )�0(∂آ∩∂ب)، χ1( ∂ A ∩ ∂ B )�1(∂آ∩∂ب)، χ2( ∂ A ∩ ∂ B )�2(∂آ∩∂ب)، χ0( ∂ A ∩ب–)�0(∂آ∩ب–)، χ1( ∂ A ∩ب–)�1(∂آ∩ب–)، χ2( ∂ A ∩ب–)�2(∂آ∩ب–)، χ0(آ–∩بo)�0(آ–∩ب�)، χ1(آ–∩بo)�1(آ–∩ب�)، χ2(آ–∩بo)�2(آ–∩ب�)، χ0(آ–∩ ∂ B )�0(آ–∩∂ب)، χ1(آ–∩ ∂ B )�1(آ–∩∂ب)، χ2(آ–∩ ∂ B )�2(آ–∩∂ب)، χ0(آ–∩ب–)�0(آ–∩ب–)، χ1(آ–∩ب–)�1(آ–∩ب–)و χ2(آ–∩ب–)�2(آ–∩ب–). مقدار تقاطع های بالا تعداد جدایی ها را در هر بعد ثبت می کند.
27IM یک چارچوب کلی برای نمایش روابط بین دو شی فضایی در فضای دو بعدی است. با این حال، نمی تواند تمام تقاطع های ممکن را نشان دهد. بنابراین، برخی از گزاره ها برای حذف روابطی که قابل نمایش نیستند، پیشنهاد می شود.
پیشنهاد 1:
بعد دو مجموعه از کوچکترین بعد مجموعه ها بیشتر نیست (معادله (10)). در معادله (10) اس1اس1 و اس2اس2 دو مجموعه هستند و کم نور (اس1)کم نور(اس1)، کم نور (اس2)کم نور(اس2) و کم نور (اس1∩اس2)کم نور(اس1∩اس2)هستند به طور جداگانه بعد از اس1اس1، اس2اس2 و تقاطع اس1اس1 و اس2اس2.
کم نور (اس1∩اس2) ≤ دقیقه ( کم نور (اس1) ، کم نور (اس2) )کم نور(اس1∩اس2)≤دقیقه(کم نور(اس1)،کم نور(اس2))
اثبات:
اگر یک مجموعه باشد اس1اس1و مجموعه دیگر است اس2اس2، تقاطع تنها زیر مجموعه ای از اس1اس1، بلکه زیر مجموعه ای از اس2اس2. بنابراین، بعد تقاطع بزرگتر از بعد نیست اس1اس1یا اس2اس2.
پیشنهاد 2:
مقدار ابعاد تقاطع توسط انواع دو شی فضایی محدود می شود.
شرط 1:
اگر تقاطع صفر نباشد، تنها مقدار ممکن برای داخلی یک خط و داخل یک منطقه از {1} ترسیم می شود. در معادله (11) Lo��و آرoآر� به طور جداگانه داخل خط و داخل منطقه هستند و کم نور (Lo∩آرo)کم نور(��∩آر�) بعد تقاطع است Lo�� و آرoآر�.
کم نور (Lo∩آرo) = 1 (Lo∩آرo≠ ϕ )کم نور(��∩آر�)=1(��∩آر�≠�)
اثبات:
اگر فضای داخلی یک خط با فضای داخلی یک منطقه تلاقی کند، بعد از تقاطع را فقط می توان از {0، 1} مطابق گزاره 1 ترسیم کرد. اگر یک نقطه ایکسایکسمتعلق به هر دو داخل یک خط و یک منطقه، همسایگی از ایکسایکسباید در داخل منطقه باشد. علاوه بر این، یک زیر مجموعه از فضای داخلی خط باید در همسایگی باشد ایکسایکس. بعد زیرمجموعه فضای داخلی خط 1 است.
شرط 2:
اگر تقاطع صفر نباشد، تنها مقدار ممکن برای داخلی یک منطقه و قسمت داخلی منطقه دیگر از {2} ترسیم می شود. در معادله (12) آرo1آر1� و آرo2آر2� داخل دو منطقه هستند و کم نور (آرo1∩آرo2)کم نور(آر1�∩آر2�) بعد تقاطع است آرo1آر1� و آرo2آر2�.
کم نور(آرo1∩آرo2) = 2 (آرo1∩آرo2≠ ϕ )کم نور(آر1�∩آر2�)=2(آر1�∩آر2�≠�)
اثبات:
اگر فضای داخلی یک منطقه با فضای داخلی منطقه دیگر قطع شود، بعد تقاطع مطابق گزاره 1 از {0، 1، 2} ترسیم می شود. اگر یک نقطه ایکسایکسمتعلق به داخل دو منطقه، همسایگی ایکسایکسباید در داخل هر دو منطقه باشد. بنابراین، تقاطع دو منطقه تنها زمانی می تواند یک منطقه باشد که تقاطع صفر نباشد.
پیشنهاد 3:
بعد تقاطع بین دو نمای بیرونی از {2} ترسیم شده است.
اثبات:
آ–آ–یا ب–ب–مجموعه ای از تمام نقاط در فضای تعبیه است آر2آر2موجود نیست در آآیا بب. زیرا آآ، ببو آ B _آ∪بزیر مجموعه ای از آر2آر2، آ–آ–یا ب–ب–دو بعدی هستند و آ–آ–و ب–ب–باید تقاطع داشته باشد بعد تقاطع مطابق گزاره 1 از {0، 1، 2} ترسیم می شود. اگر یک نقطه ایکسایکسمتعلق به بیرونی است آآو بب، محله از ایکسایکسباید در نمای بیرونی باشد آآیا بب; بنابراین، بعد تقاطع دو منطقه فقط می تواند دو بعدی باشد.
پیشنهاد 4:
بعد تقاطع بین مرز یک نقطه و مجموعه های دیگر صفر است.
اثبات:
از آنجا که مرز یک نقطه مجموعه ای خالی است، محل تقاطع مرز یک نقطه با مجموعه دیگر باید مجموعه ای خالی باشد. بنابراین، بعد تقاطع صفر است.
بر اساس گزاره های فوق، جدول 1 تاپل های ممکن را برای شش گروه روابط توپولوژیکی فهرست می کند: نقطه/نقطه، نقطه/خط، نقطه/منطقه، خط/خط، خط/منطقه و منطقه/منطقه. اگر می توان تاپل ها را پیاده سازی کرد، سلول مربوطه در جدول 1 حاوی یک علامت (“√”) است. در غیر این صورت، سلول حاوی “×” است.
3. نتایج
سه نوع از اشیاء فضایی، از جمله نقطه، خط و منطقه، تعریف شده است. بنابراین، شش گروه از روابط توپولوژیکی خلاصه می شود. این شش گروه از روابط توپولوژیکی نقطه/نقطه، نقطه/خط، نقطه/منطقه، خط/خط، خط/منطقه و منطقه/منطقه هستند و توسط 27IM در این مطالعه توصیف شدهاند.
ابتدا، روابط توپولوژیکی نقطه/نقطه توضیح داده شده است. از آنجایی که مرز یک نقطه خالی است، ممکن است یک نقطه با نقطه دیگر منفک یا مساوی باشد. بنابراین، دو رابطه توپولوژیکی بین دو نقطه قابل تحقق است. شکل 3 فرمالیسم 27IM و تفسیرهای هندسی مربوطه از دو رابطه بین دو نقطه را نشان می دهد.
دوم، روابط توپولوژیکی نقطه/خط تشریح شده است. از آنجایی که بعد یک نقطه کمتر از یک خط است، رابطه بین یک نقطه و یک خط ممکن است ناهمگون، ملاقات یا درون باشد. بنابراین، سه رابطه توپولوژیکی بین یک نقطه و یک خط وجود دارد. شکل 4 فرمالیسم 27IM و تفسیرهای هندسی مربوطه از سه رابطه بین یک نقطه و یک خط را نشان می دهد.
سوم، روابط توپولوژیکی نقطه/منطقه توضیح داده شده است. مشابه روابط توپولوژیکی نقطه/خط، سه رابطه توپولوژیکی بین یک نقطه و یک منطقه وجود دارد. شکل 5 فرمالیسم 27IM و تفاسیر هندسی مربوطه از سه رابطه بین یک نقطه و یک منطقه را نشان می دهد.
چهارم، روابط توپولوژیکی خط/خط تشریح شده است. با توجه به ابعاد و تعداد جدایی ها (مثلاً تعداد تقاطع ها بین داخل دو خط ممکن است بی نهایت باشد)، روابط توپولوژیکی نظری بی شماری بین دو خط وجود دارد. بنابراین، بیان همه روابط توپولوژیکی ممکن غیرممکن است. در عوض، شکل 6 فرمالیسم 27IM و تفسیرهای هندسی مربوطه از 9 رابطه معمولی بین دو خط را نشان می دهد.
پنجم، روابط توپولوژیکی خط/منطقه تشریح شده است. در نظر گرفتن ابعاد و تعداد جدایی ها (مثلاً تعداد تقاطع های داخلی یک خط و مرز یک منطقه، تعداد تقاطع های بین داخلی یک خط و داخل یک منطقه و تعداد تقاطع های بین داخل یک خط و بیرون یک منطقه ممکن است بی نهایت باشد)، روابط توپولوژیکی بیشماری بین یک خط و یک منطقه وجود دارد. بنابراین، بیان همه روابط توپولوژیکی ممکن غیرممکن است. در عوض، شکل 7 فرمالیسم 27IM و تفسیرهای هندسی مربوطه از 9 رابطه معمولی بین یک خط و یک منطقه را نشان می دهد.
ششم، روابط توپولوژیکی منطقه/منطقه شرح داده شده است. با در نظر گرفتن ابعاد و تعداد جدایی ها (مثلاً تعداد تقاطع ها بین داخل دو منطقه و تعداد تقاطع های بین مرزهای دو منطقه ممکن است بی نهایت باشد)، روابط توپولوژیکی بی شماری بین دو منطقه وجود دارد. بنابراین، بیان همه روابط توپولوژیکی ممکن غیرممکن است. در عوض، شکل 8 فرمالیسم 27IM و تفسیرهای هندسی مربوطه از 9 رابطه معمولی بین دو منطقه را نشان می دهد.
4. بحث
4.1. پالایش روابط توپولوژیکی
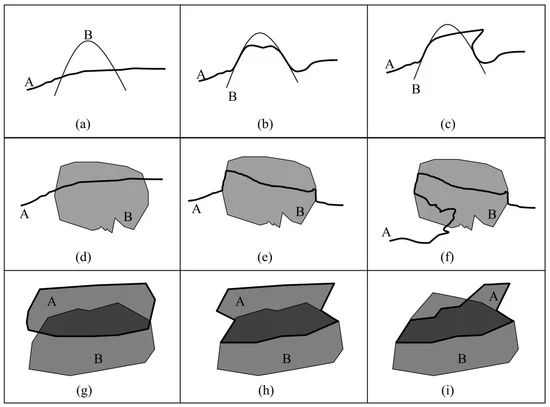
بسیاری از مدل های روابط توپولوژیکی ارائه شده است. بنابراین، مقایسه مدل پیشنهادی و سایر مدلها مفید است. با در نظر گرفتن ابعاد و تعداد تفکیک ها، روابط توپولوژیکی دقیق مشخص می شود. برخی از نمونه ها، از جمله خط/خط، خط/منطقه و منطقه/منطقه، در شکل 9 آورده شده است .
سه مدل بازنمایی روابط توپولوژیکی پرکاربرد، 9IM، DE-9IM و SNE-9IM، و همچنین 27IM پیشنهادی با توجه به توضیحات آنها از جزئیات روابط توپولوژیکی در این مطالعه مقایسه شدهاند. جدول 2 نتایج مقایسه روابط را در شکل 9 با استفاده از 9IM، DE-9IM، SNE-9IM و 27IM فهرست می کند.
فرمالیسم 9IM برای شکل 9 a-c، برای شکل 9 d-f و برای شکل 9 g-i یکسان است. از آنجا که فقط مقادیر خالی و غیر خالی را در نظر می گیرد، 9IM به طور خلاصه روابط توپولوژیکی را نشان می دهد. اگرچه تفاوت های آشکاری بین روابط توپولوژیکی در این شکل ها وجود دارد، اما با استفاده از 9IM، فرمالیسم آنها یکسان است.
از آنجایی که ابعاد تقاطعات بین فضای داخلی دو خط در شکل 9 a,b به ترتیب صفر و یک است، فرمالیسم های DE-9IM برای شکل 9 a,b متفاوت است. از آنجا که ابعاد تقاطعات بین داخل خط و مرز منطقه در شکل 9 d,e به ترتیب صفر و یک است، فرمالیسم DE-9IM برای شکل 9 d,e متفاوت است. از آنجا که ابعاد تقاطع بین مرزهای دو منطقه در شکل 9 g,h به ترتیب صفر و یک است، فرمالیسم های DE-9IM برای شکل 9g،h متفاوت هستند. DE-9IM اصلاح شده از 9IM است و می تواند ابعاد تقاطع ها را تشخیص دهد. با این حال، DE-9IM در تشخیص سایر متغیرهای توپولوژیکی مشکل دارد. برای مثال، اگرچه روابط توپولوژیکی در شکل 9 b,c متفاوت است، فرمالیسم DE-9IM برای شکل 9 b,c یکسان است. بنابراین، اگرچه DE-9IM می تواند ابعاد تقاطع ها را تشخیص دهد. نمی تواند تعداد جدایی ها را توصیف کند.
تعداد جدایی بین فضای داخلی دو خط در شکل 9 b,c به ترتیب دو و سه است. بنابراین، فرمالیسم SNE-9IM برای آن دو تصویر متفاوت است. می توان نتیجه گرفت که تعداد تفکیک بین فضای داخلی دو خط می تواند هر عدد صحیحی بزرگتر یا مساوی صفر باشد و روابط توپولوژیکی بی شماری برای دو خط وجود دارد. تعداد جدایی ها بین فضای داخلی خط و مرز منطقه در شکل 9e,f به ترتیب دو و سه هستند. بنابراین، فرمالیسم SNE-9IM برای آن دو تصویر متفاوت است. می توان نتیجه گرفت که تعداد جدایی ها بین داخل خط و مرز منطقه می تواند هر عدد صحیحی بزرگتر یا مساوی صفر باشد و روابط توپولوژیکی بی شماری برای یک خط و یک منطقه وجود دارد. تعداد جدایی بین مرز دو منطقه در شکل 9h,i به ترتیب دو و سه هستند. بنابراین، فرمالیسم SNE-9IM برای آن دو تصویر متفاوت است. می توان نتیجه گرفت که تعداد جدایی بین مرزهای دو ناحیه می تواند هر عدد صحیحی بزرگتر یا مساوی صفر باشد و روابط توپولوژیکی بی شماری برای دو ناحیه وجود دارد. SNE-9IM اصلاحی از 9IM است که توانایی تشخیص تعداد جداسازی را اضافه می کند. با این حال، SNE-9IM در تشخیص سایر متغیرهای توپولوژیکی مشکل دارد. برای مثال، اگرچه روابط توپولوژیکی در شکل 9 a,b متفاوت است، اما فرمالیسم SNE-9IM برای آن دو تصویر یکسان است. بنابراین، اگرچه SNE-9IM می تواند تعداد جداسازی ها را تشخیص دهد، اما نمی تواند ابعاد تقاطع ها را توصیف کند.
هر دو DE-9IM و SNE-9IM می توانند روابط توپولوژیکی بیشتری را نسبت به 9IM تشخیص دهند. در مقایسه با SNE-9IM، DE-9IM می تواند برخی از روابط توپولوژیکی را که توسط SNE-9IM قابل تشخیص نیست و بالعکس تشخیص دهد. 27IM نیز اصلاح شده از 9IM است و ویژگی های DE-9IM و SNE-9IM را دارد. برای مثال، فرمالیسم 27IM برای شکل 9 a-c متفاوت است. فرمالیسم 27IM برای شکل 9 d-f متفاوت است. و فرمالیسم های 27IM برای شکل 9 g–i متفاوت است. می توان نتیجه گرفت که 27IM می تواند روابط توپولوژیکی بیشتری را نسبت به 9IM، DE-9IM یا SNE-9IM تشخیص دهد.
4.2. قابلیت همکاری 27IM
27IM اصلاح شده از 9IM، DE-9IM و SNE-9IM است. ارزش 9IM، DE-9IM و SNE-9IM را می توان به راحتی از مقدار 27IM بدست آورد. با در نظر گرفتن تقاطع فضای داخلی A و داخلی B به عنوان مثال، χ0(آo∩بo)�0(آ�∩ب�)، χ1(آo∩بo)�1(آ�∩ب�)و χ2(آo∩بo)�2(آ�∩ب�)به طور جداگانه تعداد جداسازی ها در ابعاد صفر، یک بعدی و دو بعدی بین فضای داخلی A و فضای داخلی B 27IM هستند. χ (آo∩بo)�(آ�∩ب�)تعداد جدایی ها بین فضای داخلی A و B داخلی SNE-9IM است. کم نور (آo∩بo)کم نور(آ�∩ب�)بعد بین فضای داخلی A و فضای داخلی B DE-9IM است. و سی تی (آo∩بo)جتی(آ�∩ب�)مقدار تقاطع بین فضای داخلی A و فضای داخلی B 9IM است.
مقدار تقاطع فضای داخلی A و B داخلی SNE-9IM را می توان از مقدار 27IM طبق رابطه (13) به دست آورد. تعداد جداسازی SNE-9IM مجموع تعداد جداسازی ها در ابعاد صفر، یک بعدی و دو بعدی 27IM است.
χ (آo∩بo) =χ0(آo∩بo) +χ1(آo∩بo) +χ2(آo∩بo)�(آ�∩ب�)=�0(آ�∩ب�)+�1(آ�∩ب�)+�2(آ�∩ب�)
مقدار تقاطع A و Bفضای داخلی DE-9IM را می توان از مقدار 27IM مطابق با معادله (14) به دست آورد. مقدار تقاطع DE-9IM به حداکثر ابعاد تقاطع اختصاص داده می شود. اگر عدد جداسازی 27IM در دو بعد بزرگتر از صفر باشد، مقدار تقاطع DE-9IM به دو اختصاص داده می شود. اگر عدد جداسازی 27IM در دو بعد برابر با صفر و در یک بعد بزرگتر از صفر باشد، مقدار تقاطع DE-9IM به یک اختصاص داده می شود. اگر عدد جداسازی 27IM در دو بعد برابر با صفر و در ابعاد یک بعدی و بزرگتر از صفر در ابعاد صفر باشد، مقدار تقاطع DE-9IM برابر با صفر است. اگر تعداد جداسازی ها در دو بعد یک بعد و بعد صفر برابر با صفر باشد.
کم نور (آo∩بo) =⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪210– 1اگر (χ2(آo∩بo) > 0 )اگر (χ2(آo∩بo) = 0 a n d χ1(آo∩بo) > 0 ) اگر(χ2(آo∩بo) = 0 a n d χ1(آo∩بo) = 0 a n d χ0(آo∩بo) > 0 )اگر(χ2(آo∩بo) = 0 a n d χ1(آo∩بo) = 0 a n d χ0(آo∩بo) = 0 )کم نور(آ�∩ب�)={2اگر(�2(آ�∩ب�)>0)1اگر(�2(آ�∩ب�)=0 آ�د �1(آ�∩ب�)>0 )0اگر(�2(آ�∩ب�)=0 آ�د �1(آ�∩ب�)=0 آ�د �0(آ�∩ب�)>0)–1اگر(�2(آ�∩ب�)=0 آ�د �1(آ�∩ب�)=0 آ�د �0(آ�∩ب�)=0)
مقدار تقاطع فضای داخلی A و B داخلی 9IM را می توان از مقدار 27IM مطابق رابطه (15) به دست آورد. اگر تعداد جداسازی 27IM برابر با یک در دو بعد یا یک بعد یا صفر باشد، مقدار تقاطع 9IM به یک اختصاص داده می شود. اگر تعداد جداسازی 27IM در دو بعد، یک بعد و بعد صفر برابر با صفر باشد، مقدار تقاطع 9IM برابر با صفر است.
سی تی (آo∩بo) = {10اگر (χ2(آo∩بo) = 1 یا r χ1(آo∩بo) = 1 یا r χ0(آo∩بo) = 1 )اگر(χ2(آo∩بo) = 0 a n d χ1(آo∩بo) = 0 a n d χ0(آo∩بo) = 0 )جتی(آ�∩ب�)={1اگر(�2(آ�∩ب�)=1 �� �1(آ�∩ب�)=1 �� �0(آ�∩ب�)=1)0اگر(�2(آ�∩ب�)=0 آ�د �1(آ�∩ب�)=0 آ�د �0(آ�∩ب�)=0)
قابلیت همکاری 27IM با SNE-9IM، DE-9IM و 9IM به طور جداگانه توسط معادلات (13)-(15) ارائه شده است. می توان نتیجه گرفت که قابلیت همکاری 27IM با سایر مدل های روابط توپولوژیکی مانند 9IM، DE-9IM و SNE-9IM بسیار خوب است.
5. نتیجه گیری ها
سهم جدید این مقاله در پیشنهاد آن از یک مدل جامع برای روابط توپولوژیکی به نام 27IM نهفته است که هم ابعاد و هم تعداد جداسازی ها را در نظر می گیرد. 27IM شش گروه از روابط توپولوژیکی را توصیف می کند: نقطه / نقطه، نقطه / خط، نقطه / منطقه، خط / خط، خط / منطقه و روابط منطقه / منطقه. اولین مزیت 27IM این است که روابط توپولوژیکی تحت تبدیل های توپولوژیکی حفظ می شود. دومین مزیت 27IM این است که روابط توپولوژیکی بیشتری را در مقایسه با 9IM، DE-9IM و SNE-9IM متمایز می کند. مزیت سوم 27IM این است که قابلیت همکاری 27IM با 9IM، DE-9IM و SNE-9IM خوب است.
اگرچه 27IM یک مدل دقیق است، اما پیچیدهتر از 9IM، DE-9IM و SNE-9IM است که هر کدام فقط به 9 تاپل نیاز دارند، در حالی که 27IM به 27 تاپل نیاز دارد. اجتناب ناپذیر است که بسیاری از روابط توپولوژیکی فضایی نامعتبر در 27IM ظاهر شوند. برای حذف روابط توپولوژیکی فضایی غیرممکن، 23 شرط پیشنهاد شده توسط Egenhofer و Herring (1991) می تواند برای 27IM تجدید نظر شود. محتوی تمام جزئیات برای 27IM غیرممکن است. برخی از متغیرهای توپولوژیکی دیگر (یعنی دنباله تقاطع مرز-مرز یا انواع تقاطع های مرز-مرز) در نظر گرفته نمی شوند. 27IM را می توان برای نشان دادن جزئیات بیشتر روابط توپولوژیکی هر زمان که لازم باشد گسترش داد. این مطالعه فقط به اشیاء ساده می پردازد. اشیاء پیچیده، مانند اشیاء چند نقطه ای، چند خطی و چند منطقه ای در نظر گرفته نمی شوند. همانطور که رایج است، اشیاء پیچیده را می توان ترکیبی از اشیاء ساده در نظر گرفت. بنابراین، 27IM همچنین می تواند روابط توپولوژیکی بین اشیاء پیچیده را توصیف کند. تعداد روابط توپولوژیکی ممکن درگیر در روابط خط/خط، خط/منطقه و منطقه/منطقه بی شمار است. در نتیجه، فقط برخی از روابط معمولی و تفاسیر هندسی متناظر آنها گنجانده شده است. فقط اشیاء فضایی دو بعدی مورد بحث قرار می گیرند. اشیاء فضایی سه بعدی شامل نمی شوند. اگرچه 27IM نمی تواند مستقیماً برای اشیاء فضایی سه بعدی استفاده شود، 27IM را می توان به مدل 36 تقاطع (36IM) برای شی فضایی سه بعدی گسترش داد. 36IM یک ماتریس 12×3 خواهد بود که تعداد جداسازی ها را در ابعاد صفر، یک بعدی، دو بعدی و سه بعدی نشان می دهد.
در نهایت، 27IM می تواند روابط توپولوژیکی بیشتر را بر اساس تشخیص بعد و تعداد جدایی ها تشخیص دهد. سایر تغییرات توپولوژیکی به عنوان اصلاحات مشخصات خالی/غیر خالی در آینده گنجانده خواهد شد. روابط توپولوژیکی اجسام سه بعدی و اجسام پیچیده نیز مورد بحث قرار خواهد گرفت.
منابع
- چن، جی. لی، سی. لی، ز. طلا، C. مدل 9 تقاطع مبتنی بر ورونوی برای روابط فضایی. بین المللی جی. جئوگر. Inf. علمی 2001 ، 3 ، 201-220. [ Google Scholar ] [ CrossRef ]
- لاندو، بی. Jackendoff, R. “What” و “Where” در زبان فضایی و شناخت فضایی. رفتار مغز. علمی 1993 ، 2 ، 217-238. [ Google Scholar ] [ CrossRef ]
- اگنهوفر، ام. مارک، دی. جغرافیای ساده لوح. در مجموعه مقالات COSIT ’95، Semmering، اتریش، 21-23 سپتامبر 1995. صص 1-15.
- دوبه، م. Egenhofer, M. ترتیب روابط توپولوژیکی محدب. در مجموعه مقالات GIScience، کلمبوس، OH، ایالات متحده آمریکا، 18-21 سپتامبر 2012. صص 72-86.
- آلن، جی. حفظ دانش در مورد فواصل زمانی. اشتراک. ACM. 1983 ، 11 ، 832-843. [ Google Scholar ] [ CrossRef ]
- ماسوناگا، ی. بررسی مجدد منطق زمانی مبتنی بر فاصله آلن. ترانس. آگاه کردن. روند. Soc. Jpn. 1998 ، 4 ، 846-855. [ Google Scholar ]
- اگنهوفر، ام. Franzosa، R. روابط فضایی توپولوژیکی مجموعه نقطه ای. بین المللی جی. جئوگر. Inf. علمی 1991 ، 2 ، 161-174. [ Google Scholar ] [ CrossRef ]
- اگنهوفر، ام. Herring, J. طبقه بندی روابط توپولوژیکی دوتایی بین مناطق، خطوط و نقاط در پایگاه های اطلاعات جغرافیایی . گزارش فنی 01/1991; دانشگاه مین: Orono، ME، ایالات متحده آمریکا، 1991; پ. 28. [ Google Scholar ]
- اگنهوفر، ام. شارما، جی. مارک، دی. مقایسه انتقادی مدل های 4-تقاطع و 9-تقاطع برای روابط فضایی: تحلیل رسمی. در مجموعه مقالات کنفرانس اتوکارتو، مینیاپولیس، MN، ایالات متحده، 30 اکتبر تا 1 نوامبر 1993. صص 1-12.
- راندل، دی. Cohn، A. مدل سازی خواص توپولوژیکی و متری فرآیندهای فیزیکی. در مجموعه مقالات کنفرانس بین المللی اصول بازنمایی و استدلال دانش، تورنتو، ON، کانادا، 15-18 مه 1989. صص 357-368.
- راندل، دی. کوی، ز. Cohn, A. منطق فضایی مبتنی بر مناطق و اتصال. در مجموعه مقالات سومین کنفرانس بین المللی اصول بازنمایی و استدلال دانش ; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1992; صص 165-176. [ Google Scholar ]
- کوهن، ا. راندل، دی. Cui، Z. طبقه بندی روابط کیفی فضایی منطقی تعریف شده. بین المللی جی. هوم. محاسبه کنید. St. 1995 , 5 , 831-846. [ Google Scholar ] [ CrossRef ]
- گاتز، ن. گودی، جی. Cohn، A. یک رویکرد مبتنی بر اتصال به توصیف و استدلال توپولوژیکی عقل سلیم. مونیست 1996 ، 1 ، 51-75. [ Google Scholar ] [ CrossRef ]
- کوهن، ا. بنت، بی. گودی، جی. Gotts، N. RCC: حسابی برای استدلال فضایی کیفی مبتنی بر منطقه. GeoInformatica 1997 ، 3 ، 275-316. [ Google Scholar ] [ CrossRef ]
- جانسون، پی. Drakengren، T. طبقه بندی کامل قابلیت کشش در RCC-5. جی آرتیف. هوشمند Res. 1997 ، 1 ، 211-221. [ Google Scholar ]
- دنگ، م. چنگ، تی. چن، ایکس. Li، Z. روابط توپولوژیکی چند سطحی بین مناطق فضایی بر اساس متغیرهای توپولوژیکی. Geoinformatica 2007 ، 11 ، 239-267. [ Google Scholar ] [ CrossRef ]
- لیو، ک. Shi, W. مدل توسعه یافته روابط توپولوژیکی بین اشیاء فضایی در سیستم های اطلاعات جغرافیایی. بین المللی J. Appl. زمین. Obs. 2007 ، 9 ، 264-275. [ Google Scholar ] [ CrossRef ]
- Kurata، Y. تقاطع 9+: یک چارچوب جهانی برای مدلسازی روابط توپولوژیکی. در علم اطلاعات جغرافیایی ; Springer: برلین/هایدلبرگ، آلمان، 2008; ص 181-198. [ Google Scholar ] [ CrossRef ]
- آلبودی، الف. سدس، اف. Inglada، J. مدل سازی روابط توپولوژیکی بین مناطق فضایی نامشخص در پایگاه داده های جغرافیایی فضایی: تقاطع نامشخص و مدل توپولوژیکی تفاوت. در مجموعه مقالات دومین کنفرانس بینالمللی 2010 در زمینه پیشرفتها در پایگاههای داده، دانش و کاربردهای داده، فهرستها، فرانسه، 11 تا 16 آوریل 2010. صص 7-15.
- لنگ، ال. یانگ، جی. چن، اس. یک مکانیسم استدلال ترکیبی با روابط توپولوژیکی و متریک برای تشخیص تغییر در پلانهای رودخانه: برنامهای برای بدنههای آبی globeland30. ISPRS Int. J. Geo-Inf. 2017 ، 1 ، 1-13. [ Google Scholar ] [ CrossRef ]
- لانگ، ز. Li, S. طبقه بندی کامل روابط فضایی با استفاده از مدل نه تقاطع مبتنی بر voronoi. بین المللی جی. جئوگر. Inf. علمی 2013 ، 10 ، 2006-2025. [ Google Scholar ] [ CrossRef ]
- لوئیس، جی. دوبه، م. Egenhofer, M. توپولوژی صحنه های فضایی در R2. در مجموعه مقالات COSIT 2013، اسکاربرو، انگلستان، 2 تا 6 سپتامبر 2013. صص 495-515.
- دوبه، م. اگنهوفر، ام. لوئیس، جی. استفان، اس. Plummer، M. مناطق کانتون سوئیس: مدلی برای اشیاء پیچیده در پارتیشنهای جغرافیایی. در مجموعه مقالات COSIT 2015، سانتافه، NM، ایالات متحده، 12-16 اکتبر 2015. صص 309-330.
- Egenhofer، M. یک سیستم مرجع برای روابط توپولوژیکی بین اشیاء فضایی مرکب. در پیشرفت در مدل سازی مفهومی – دیدگاه های چالش برانگیز ; Heuser, C., Pernul, G., Eds. Springer: برلین، آلمان، 2009; جلد 5833، ص 307–316. [ Google Scholar ]
- کلمنتینی، ای. فلیس، پی. Oosterom، P. مجموعه کوچکی از روابط توپولوژیکی رسمی مناسب برای تعامل با کاربر نهایی. در مجموعه مقالات سمپوزیوم بین المللی Ssd’93 یادداشت های سخنرانی در علوم کامپیوتر، سنگاپور، 23-25 ژوئن 1993; صص 277-295.
- Egenhofer، M. مدلی برای روابط توپولوژیکی باینری دقیق. Geomatica 1993 ، 3 ، 261-273. [ Google Scholar ]
- اگنهوفر، ام. Franzosa, R. در مورد هم ارزی روابط توپولوژیکی. بین المللی جی. جئوگر. Inf. علمی 1995 ، 2 ، 133-152. [ Google Scholar ] [ CrossRef ]
- کلمنتینی، ای. Felice, P. متغیرهای توپولوژیکی برای خطوط. IEEE. ترانس. بدانید. داده ها. مهندس 1998 ، 1 ، 38-54. [ Google Scholar ] [ CrossRef ]
- اگنهوفر، ام. شریف، الف. جزئیات متریک برای روابط فضایی زبان طبیعی. ACM Trans. Inf. سیستم 1998 ، 4 ، 321-349. [ Google Scholar ] [ CrossRef ]
- شریف، ع. اگنهوفر، ام. مارک، دی. روابط فضایی زبان طبیعی بین اشیاء خطی و مساحتی: توپولوژی و متریک اصطلاحات انگلیسی زبان. بین المللی جی. جئوگر. Inf. علمی 1998 ، 3 ، 215-246. [ Google Scholar ]
- گودوی، اف. رودریگز، A. توصیف کمی از تنظیمات فضایی. در پیشرفت در مدیریت داده های مکانی ; Springer: هایدلبرگ، آلمان، 2002; صص 299-311. [ Google Scholar ]
- نداس، ک. اگنهوفر، ام. ویلمسن، دی. جزئیات متریک روابط خط-خط توپولوژیکی. بین المللی جی. جئوگر. Inf. علمی 2007 ، 1 ، 21-48. [ Google Scholar ] [ CrossRef ]
- اگنهوفر، ام. دوب، M. روابط توپولوژیکی از اصلاحات متریک. در مجموعه مقالات هفدهمین سمپوزیوم بین المللی ACM Sigspatial در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، سیاتل، WA، ایالات متحده، 4-6 نوامبر 2009. صص 158-167.
- سریدار، م. کوهن، ا. هاگ، دی. از ویدئو تا RCC8: بهرهبرداری از معناشناسی مبتنی بر فاصله برای تثبیت تفسیر روابط mereotopological. در نظریه اطلاعات مکانی ; Springer: هایدلبرگ، آلمان، 2011; صص 110-125. [ Google Scholar ]
- دوبه، م. بارت، جی. Egenhofer، M. از متریک تا توپولوژی: تعیین روابط در فضای گسسته. در مجموعه مقالات دوازدهمین کنفرانس بین المللی، COSIT 2015، سانتافه، NM، ایالات متحده آمریکا، 12-16 اکتبر 2015; صص 151-171.
- کارلسون، ای. مدلسازی مفهومی سه بعدی سازه های زیرسطحی. در مجموعه مقالات کنوانسیون سالانه ASPRS-ACSM، بالتیمور، MD، ایالات متحده آمریکا، 29 مارس تا 3 آوریل 1987. ص 188-200.
- Molenaar, M. ساختار داده رسمی برای نقشه های برداری سه بعدی. در مجموعه مقالات EGIS’90، آمستردام، هلند، 10-14 سپتامبر 1990; صص 770-781.
- پیلوک، م. تمفلی، ک. Molenaar، M. یک مدل داده بردار سه بعدی مبتنی بر چهار وجهی برای اطلاعات جغرافیایی. در مجموعه مقالات AGDM’94 مدل سازی داده های مکانی و زبان های پرس و جو برای کاربردهای دو بعدی و سه بعدی، دلفت، هلند، 12 تا 14 سپتامبر 1994. صص 129-140.
- Pilouk, M. مدلسازی یکپارچه برای GIS سه بعدی. دکتری پایان نامه، موسسه بین المللی بررسی هوافضا و علوم زمین (ITC)، Enschede، هلند، ژوئن 1996. [ Google Scholar ]
- Pigot, S. مدل های توپولوژیکی برای سیستم های اطلاعات فضایی سه بعدی. در مجموعه مقالات کنفرانس اتوکارتو، بالتیمور، MD، ایالات متحده آمریکا، 25-28 مارس 1991; صص 368-392.
- Brisson, E. نمایش ساختارهای هندسی در ابعاد: توپولوژی و نظم. گسسته. محاسبه کنید. Geom. 1993 ، 1 ، 387-426. [ Google Scholar ] [ CrossRef ]
- OpenGIS Consortium, Inc. مشخصات ویژگی های ساده OpenGIS برای SQL (نسخه 1.1). 1999. در دسترس آنلاین: http://www.opengis.org/techno/specs/99–049.pdf (دسترسی در 15 مه 2016).
- زلاتانوا، S. GIS سه بعدی برای توسعه شهری. دکتری پایان نامه، موسسه بین المللی بررسی هوافضا و علوم زمین (ITC)، Enschede، هلند، مارس 2000. [ Google Scholar ]
- راموس، اف. یک رویکرد چند سطحی برای مدلسازی سهبعدی سیستمهای اطلاعات جغرافیایی. در مجموعه مقالات سمپوزیوم در نظریه زمین فضایی، پردازش و کاربردها، اتاوا، ON، کانادا، 9-12 جولای 2002. صص 1-5.
- لی، جی. کوان، ام. یک مدل داده ترکیبی برای نمایش روابط توپولوژیکی میان ویژگیهای جغرافیایی سه بعدی در محیطهای میکرو فضایی. بین المللی جی. جئوگر. Inf. علمی 2005 ، 10 ، 1039-1056. [ Google Scholar ] [ CrossRef ]
- کنسرسیوم فضایی باز استاندارد رمزگذاری زبان نشانه گذاری جغرافیای شهر OGC (CityGML). 2012. در دسترس آنلاین: https://portal.opengeospatial.org/files/?artifact_id=47842 (در 7 ژوئیه 2016 قابل دسترسی است).
- یوان، ال. یو، ز. لو، دبلیو. یی، ال. Lv، G. محاسبه روابط توپولوژیکی چند بعدی-یکپارچه: یک رویکرد مبتنی بر جبر هندسی سلسله مراتبی. بین المللی جی. جئوگر. Inf. علمی 2014 ، 12 ، 2435-2455. [ Google Scholar ] [ CrossRef ]
- یو، ز. لو، دبلیو. یوان، ال. هو، ی. زو، ا. Lv، G. مدل جبر هندسی برای محاسبه رابطه توپولوژیکی هندسه گرا. ترانس. GIS 2016 ، 2 ، 259-279. [ Google Scholar ] [ CrossRef ]
- آدامز، سی. Franzosa, R. Introduction to Topology: Pure and Applied ; Prentice Hall: Upper Saddle River, NJ, USA, 2008; صص 73-83. [ Google Scholar ]
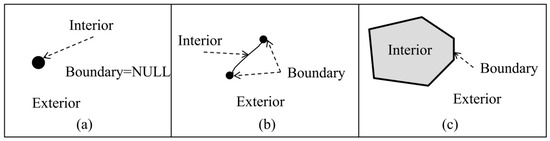
شکل 1. اشیاء فضایی شامل داخل، مرز و بیرون. الف ) نقطه ای با باطن، مرز و بیرون آن . ب ) خطی با داخل، مرز و بیرون آن. ج ) منطقه ای با درون، مرز و بیرون آن .
شکل 2. ( الف – ج ) اشیاء فضایی و روابط توپولوژیکی آنها.
شکل 3. فرمالیسم مدل 27 تقاطع (27IM) و تفاسیر هندسی مربوطه بین دو نقطه.

شکل 4. فرمالیسم 27IM و تفاسیر هندسی مربوطه بین یک نقطه و یک خط.

شکل 5. فرمالیسم 27IM و تفاسیر هندسی مربوطه بین یک نقطه و یک منطقه.
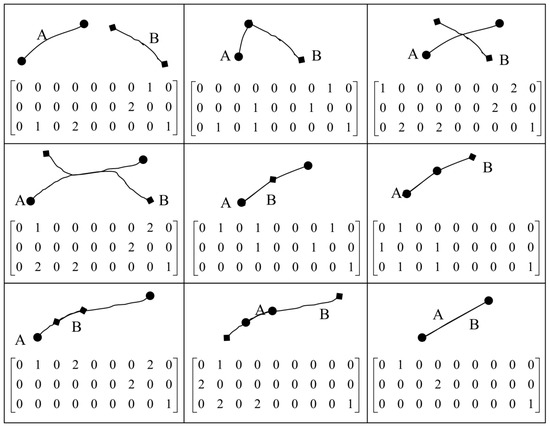
شکل 6. فرمالیسم 27IM و تفسیرهای هندسی مربوطه بین دو خط.
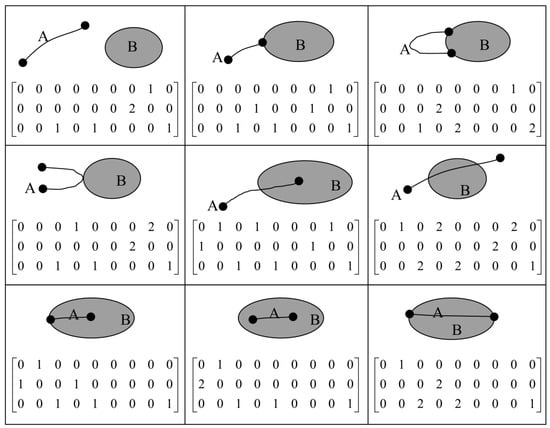
شکل 7. فرمالیسم 27IM و تفاسیر هندسی مربوطه بین یک خط و یک منطقه.
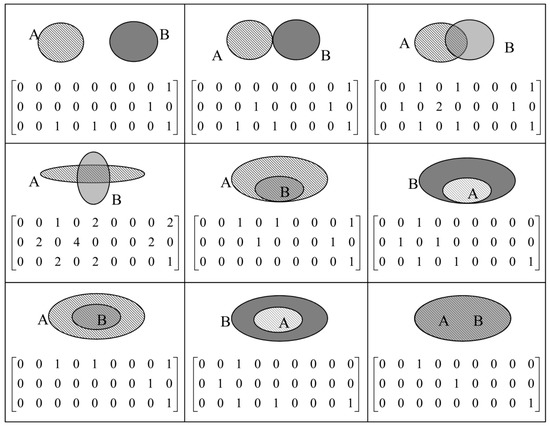
شکل 8. فرمالیسم 27IM و تفاسیر هندسی مربوطه بین دو منطقه.
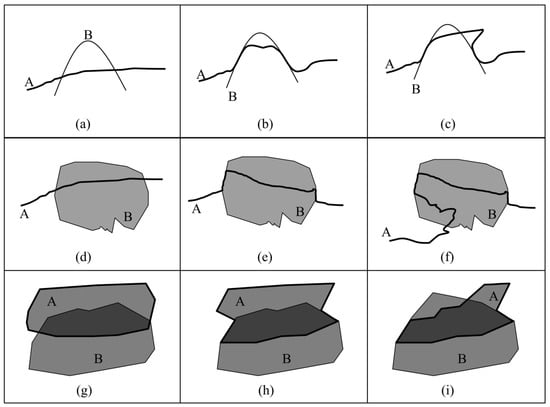
شکل 9. نمونه هایی از روابط توپولوژیکی بین دو شی فضایی. ( a – c ) روابط توپولوژیکی بین خط A و خط B. ( d – f ) روابط توپولوژیکی بین خط A و منطقه B. ( g – i ) روابط توپولوژیکی بین منطقه A و منطقه B.

جدول 1. تاپل های ممکن برای شش گروه از روابط توپولوژیکی.
جدول 2. رابطه توپولوژیکی همانطور که توسط 9IM، ماتریس نه تقاطع توسعه یافته بعدی (DE-9IM)، ماتریس نه تقاطع توسعه یافته شماره جدایی (SNE-9IM) و 27IM توضیح داده شده است.
© 2017 توسط نویسندگان. دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC BY) ( http://creativecommons.org/licenses/by/4.0/ ) توزیع شده است.
بدون نظر