

خلاصه
در این مطالعه، از داده های LIDAR DEM برای به دست آوردن یک نقشه لندفرم اولیه مطابق با یک روش شناخته شده استفاده شد. این نقشه لندفرم اولیه با استفاده از ابزار آمار کانونی (اکثریت)، با در نظر گرفتن شرایط حداقل مساحت در تعمیم نقشه کشی به منظور به دست آوردن نقشه های لندفرم در مقیاس های 1:1000 و 1:5000 تعمیم داده شد. هر دو نقشه لندفرم اولیه و تعمیم یافته به صورت بصری با DEM سایه دار و یک عکس ارتوفتو تأیید شدند. در نتیجه، این نقشه ها تصاویر بصری رضایت بخشی از لندفرم ها را ارائه می دهند. به منظور نشان دادن اثر تعمیم، مساحت هر لندفرم در هر دو نقشه اولیه و تعمیم شده محاسبه شد. در نتیجه، نقشههای شکل زمین در مقیاسهای بزرگ را میتوان با روش پیشنهادی، از جمله تعمیم با استفاده از LIDAR DEM، بهدست آورد.
کلید واژه ها:
DEM ; تعمیم ; GIS ; طبقه بندی شکل زمین ; LIDAR ; حداقل مساحت
1. معرفی
شکل زمین اغلب مهم ترین عامل در تمایز بین مناطق و عنصر مهم طبقه بندی جغرافیایی، گونه بندی و منطقه بندی است. ادوارد اچ. هاموند [ 1 و 2 ] یک روش طبقهبندی لندفرم کلان برای شناسایی انواع شکل زمین برای ایالات متحده ایجاد کرد. این روش طبقه بندی برای نقشه برداری لندفرم ها در سراسر جهان استفاده شده است. طبقه بندی هاموند ماهیت کمی دارد، با تعاریف صریح که می تواند به راحتی توسط سایر محققان اعمال شود. روش هاموند سه پارامتر مهم را ترکیب می کند (به عنوان مثال، شیب، برجستگی و نوع پروفیل) برای شناسایی انواع مختلف زمین یا زمین. به گفته هاموند: شکل زمین (نوع زمین) = شیب + تسکین + نمایه. ترکیب این ویژگی ها می تواند تا 96 واحد شکل زمین را فراهم کند. هاموند تشخیص داد که کمتر از نیمی از این موارد در ایالات متحده رایج است، بنابراین او تنها از 45 واحد در نقشه خود استفاده کرد. هاموند مناطق کوچکتر از 2072 کیلومتر مربع را در واحدهای مجاور ادغام کرد تا بتواند اطلاعات را در مقیاس 1:5000000 نقشه منتشر شده خود تعمیم دهد. این لندفرمها متعاقباً توسط هاموند به دستههای لندفرم وسیعتری از جمله دشتهای تقریباً هموار، دشتهای غلتشی و نامنظم، دشتهایی با تپهها یا کوهها با فواصل وسیع، دشتهای نیمه جدا شده، تپهها، کوههای کم ارتفاع و کوههای مرتفع گروهبندی شدند. دیکاو و همکاران [3 و 4 ] تلاش کردند تا رویه هاموند را در طبقه بندی شکل زمین خود در نیومکزیکو با استفاده از یک سیستم اطلاعات جغرافیایی (GIS) که رویه های دستی هاموند را خودکار می کند، اعمال کنند. اصلاحات اصلی آنها این بود که از هیچ روش تعمیم استفاده نکردند و همه 96 واحد شکل زمین را در تجزیه و تحلیل خود گنجانده بودند. آنها برخی از اصطلاحات واحد مورد استفاده توسط هاموند را تغییر دادند، حرکت پنجره را اصلاح کردند و گروه بندی های خود را از دسته بندی های لندفرم گسترده تر ایجاد کردند. یک فرآیند جدید توسعه یافته توسط برابین [ 5 ] تا حدودی مشکلات فرآیند طبقه بندی دیکاو و همکاران را حل می کند. این فرآیند در کل نیوزلند اعمال شده است و طبقهبندی ایجاد میکند که شکلهای زمین کلان را نشان میدهد. مورگان و لش [ 6] مدل هاموند را با استفاده از مجموعه داده های ملی ارتفاع (NED) با وضوح 30 متری 7.5 دقیقه سازمان زمین شناسی ایالات متحده با ArcGIS ModelBuilder پیاده سازی کرد و نسخه های Dikau از نقشه های لندفرم هاموند را تولید کرد. گالانت و همکاران [ 7 ] روشی را برای نگاشت لندفرم هاموند بر روی مناظر بزرگ با استفاده از داده های ارتفاعی دیجیتالی خودکار کرد. آنها نتایج خود را با نقشه های شکل زمین منتشر شده هاموند که با استفاده از روش های تفسیر دستی به دست آمده بود، مقایسه کردند. هرواتین و پرکو [ 8] تناسب روش هاموند را برای تعیین واحدهای شکل زمین در اسلوونی آزمایش کرد. اول، آنها عناصر طبقه بندی اصلی را در نظر گرفتند. تنها سیزده واحد از بیست و یک واحد شکل زمین مشخص شده توسط هاموند انتخاب شدند. آنها روش اصلی هاموند را برای تغییر شکل و اندازه پنجره اصلی و مرزهای بین کلاسهای عناصر طبقهبندی مناسب تطبیق دادند. بنابراین، 19 واحد شکل زمین در اسلوونی با استفاده از روش اقتباس شده شناسایی شدند. مرینا و همکاران [ 9 ] یک طبقهبندی خودکار لندفرم از استان آلیکانته (اسپانیا) را در مقیاس 1:25000 به دست آورد، و نقشه لندفرم نتیجه با شکل زمین واقعی با تصاویر قرارداده شد. ویلیامز و همکاران [ 10] مستقیماً کلاسهای لندفرم مورگان و لش را برای مناطق نشاندادهشده در نماهای ویدیویی با رایجترین اصطلاحات شکل زمینی شرکتکنندگان ارائهشده برای یک مکان مقایسه کرد.
هدف اصلی این مطالعه به دست آوردن نقشه های لندفرم در مقیاس های 1:1000 و 1:5000 با استفاده از GIS و LIDAR DEM می باشد. نقشه های لندفرم در مقیاس های 1:1000 و 1:5000 از یک نقشه لندفرم اولیه با در نظر گرفتن شرایط “حداقل مساحت” در تعمیم نقشه برداری مشتق شده اند. نقشه لندفرم اولیه مطابق با روش مورگان و لش به جز شعاع پنجره جستجو در عملگر محله و ابزار طبقه بندی مجدد شیب به دست می آید. علاوه بر این، یک رابط برای اتوماسیون فرآیند توسعه داده شد.
2. روش شناسی
داده های ورودی LIDAR DEM با وضوح 0.25 متر است. ابتدا یک چند ضلعی بافر در اطراف مرزهای منطقه مورد مطالعه ایجاد می شود. فاصله بافر به گونه ای مشخص می شود که حداقل باید مقدار شعاع دایره باشد تا به عنوان پارامتر پنجره جستجو در مرحله طبقه بندی استفاده شود. در این مطالعه، از آنجایی که شعاع دایره 50 پیکسل تعیین شد، فاصله بافر 50 × 0.25 = 12.5 متر محاسبه شد. بافر برای رفع مشکل احتمالی تطبیق لبه ها از دید شکل زمین استفاده می شود. به عبارت دیگر، برای به دست آوردن لندفرم های پیوسته در اطراف مناطق مورد مطالعه همجوار استفاده می شود. سپس، LIDAR DEM با استفاده از یک چند ضلعی بافر بریده می شود، مرزهای گسترده منطقه مورد مطالعه. با استفاده از LIDAR DEM بریده شده، یک نقشه لندفرم اولیه مطابق با روش پیشنهادی مورگان و لش [ 6 ]، با برخی اصلاحات به دست می آید ( بخش 2.2).). نقشه لندفرم اولیه با استفاده از مرزهای منطقه مورد مطالعه بریده شده است. نقشه لندفرم بریده شده به نقشه برداری تبدیل می شود. چند ضلعی با کوچکترین مساحت در نقشه برداری تعیین می شود. مقدار آن با مقدار معیار “حداقل مساحت” در تعمیم کارتوگرافی مقایسه می شود. اگر مقدار کوچکترین منطقه در نقشه لندفرم بزرگتر یا مساوی با مقدار “حداقل مساحت” باشد، نقشه لندفرم برای مقیاس مشخص شده مناسب است. در غیر این صورت، ابزار آمار کانونی (اکثریت) برای حذف مناطق کوچک در حالی که بسیاری از الگوی فضایی اصلی را حفظ میکند، روی نقشه لندفرم اولیه اعمال میشود و بنابراین یک نقشه لندفرم تعمیمیافته به دست میآید. نقشه لندفرم تعمیم یافته با استفاده از مرزهای منطقه مورد مطالعه برش داده شده است. نقشه لندفرم بریده شده به نقشه برداری تبدیل می شود و دوباره با توجه به معیار “حداقل مساحت” آزمایش می شود. این فرآیند تا زمانی تکرار میشود که مقدار کوچکترین منطقه در نقشه لندفرم بزرگتر یا مساوی مقدار «حداقل مساحت» باشد. لازم به ذکر است که آزمایش بر روی نقشه لندفرم بریده شده انجام می شود تا بافر (به عنوان مثال ، اولیه) نقشه لندفرم، به منظور تصمیم گیری صحیح در مورد کوچکترین چند ضلعی درست در داخل منطقه مورد مطالعه. نمودار جریان در شکل 1 روش شناسی این مطالعه را نشان می دهد. توضیحات تفصیلی در زیر بخش های زیر آورده شده است.
2.1. منبع اطلاعات
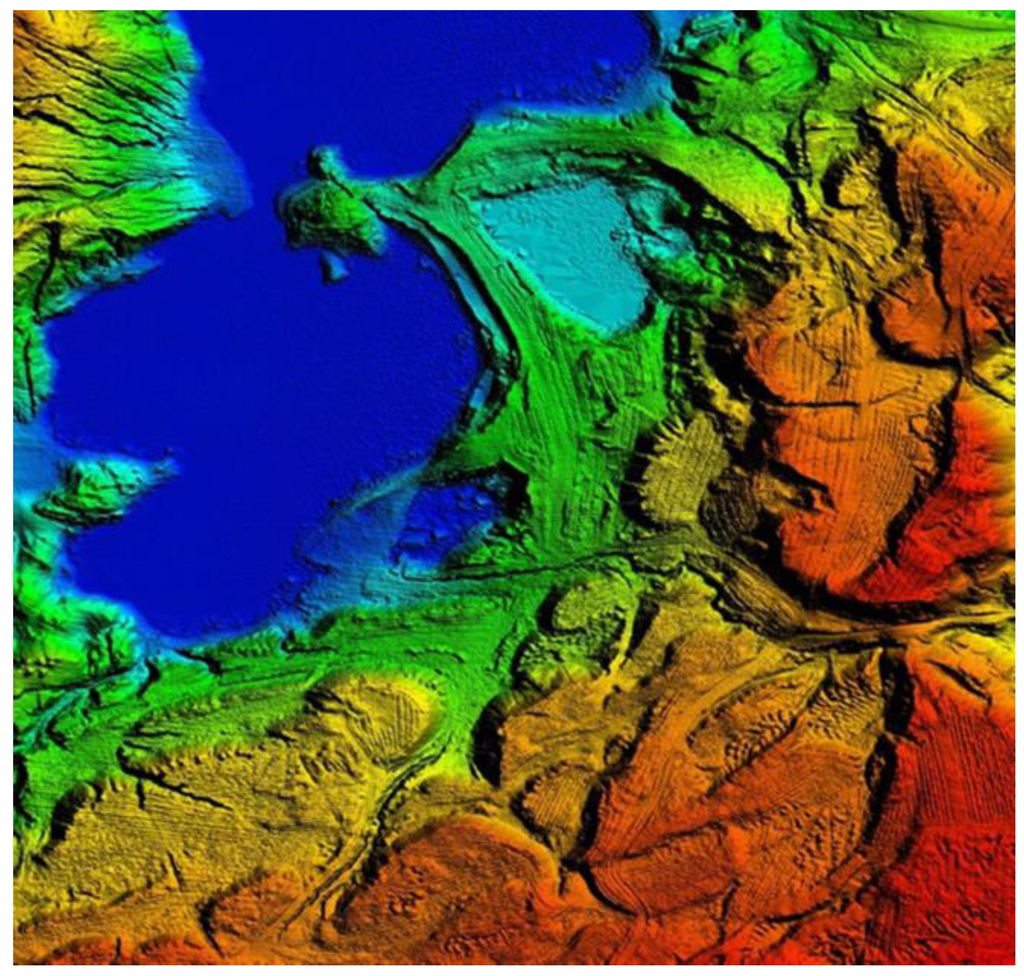
وضوح بسیار بالا (0.25 متر اندازه سلول) LIDAR DEM داده ورودی اصلی برای این مطالعه بود ( شکل 2 ). یک برگه نقشه توپوگرافی استاندارد در مقیاس 1:1000 (F21-a-20-c-4-b) از یک منطقه واقع در نزدیکی Yeniköy، Eyüp، استانبول، ترکیه به عنوان منطقه مورد مطالعه انتخاب شد. از 2808 ردیف و 2134 ستون ( یعنی 5992272 سلول شبکه) تشکیل شده است و در سال 2013 تولید شده است. حداقل و حداکثر ارتفاع در منطقه مورد مطالعه به ترتیب 13.66 متر و 44.88 متر است. مشخصه اصلی این منطقه این است که چندین معدن سابق وجود دارد که اکنون دریاچه های مصنوعی به رنگ آبی تیره نشان داده شده است، همانطور که در شکل 2 نشان داده شده است.. از آنجایی که آنها به صورت دشت های مسطح یا تقریباً مسطح در نقشه لندفرم ظاهر شدند، مزیت قابل توجهی در اعتبارسنجی نتایج این مطالعه به ما می دهد. به همین دلیل این منطقه را به عنوان منطقه مورد مطالعه انتخاب کردیم. داده ها توسط شهرداری متروپولیتن استانبول ارائه شده است.
2.2. روش طبقه بندی
روش توسعه یافته توسط مورگان و لش [ 6 ] (با برخی اصلاحات) در طبقه بندی شکل زمین استفاده شد. هنگامی که مقدار شعاع 20 پیکسل برای همسایگی استفاده شد (مطابق با روش مورگان و لش)، بسیاری از پیکسلهای دارای NoData در نقشه لندفرم حاصله رخ دادند. از طریق آزمون و خطا، مقدار شعاع 50 پیکسل مناسب تشخیص داده شد. تمام پیکسلهای موجود در نقشه لندفرم حاصل، تنها زمانی که از مقدار شعاع 50 پیکسل برای همسایگی استفاده میشد، با NoData ارزشی نداشتند. علاوه بر اتوماسیون گردش کار مورگان و لش، یک رابط توسعه داده شد تا برخی از پارامترهای مدل توسط کاربر قابل تغییر باشد.
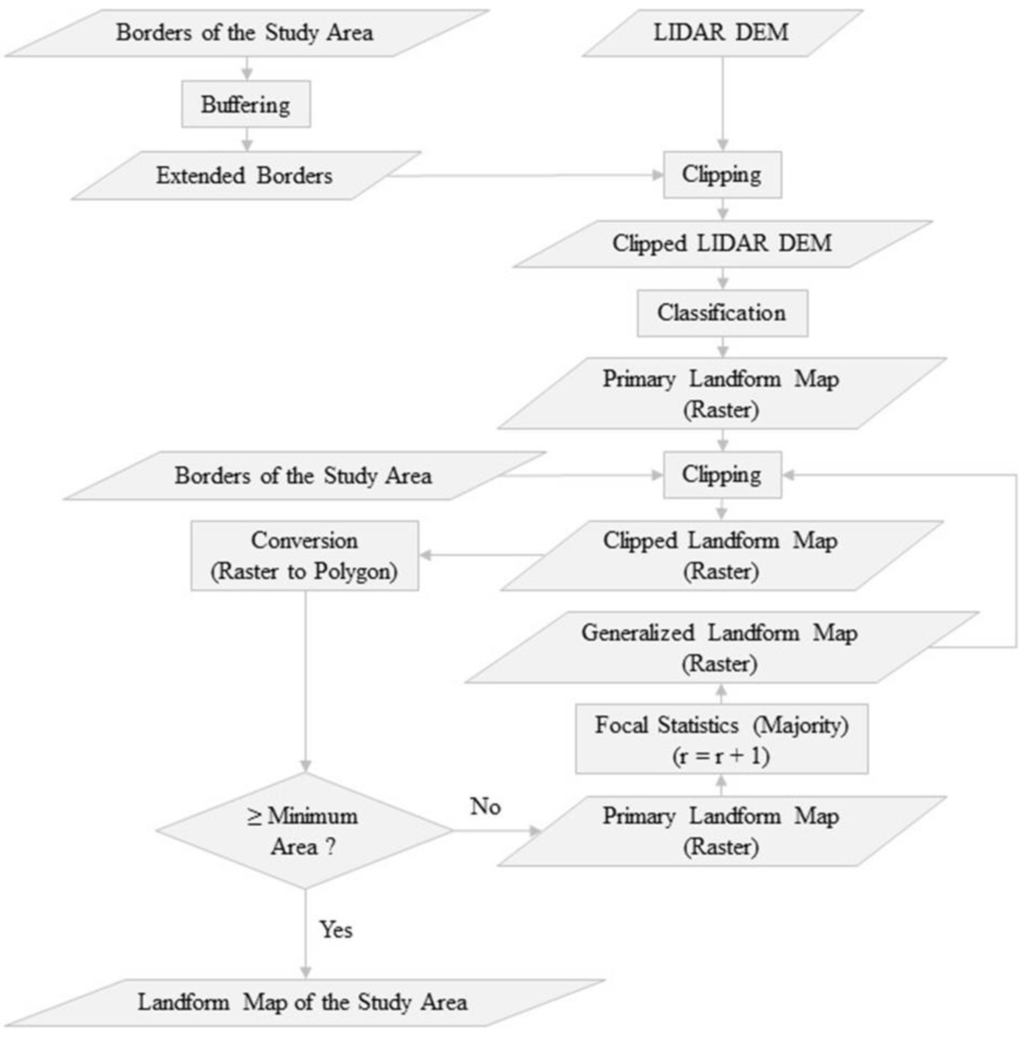
شکل 1. نمودار جریان روش.

شکل 2. LIDAR DEM با وضوح 0.25 متر از منطقه مورد مطالعه.
به منظور تبدیل آستانه شیب به پارامتر مدل در رابط، از ابزار منطقی (بیشتر از) به جای ابزار طبقهبندی مجدد شیب در مدل مورگان و لش استفاده شد.
مطابق با گردش کار روش مورگان و لش، تجزیه و تحلیل به سه بخش فرعی تقسیم میشود: شیب، برجستگی، و پروفیل، که نتایج آنها سپس برای تشکیل طبقهبندی نهایی لندفرم ترکیب میشوند. نقشه شیب درصد زمین نزدیک به سطح را برای هر پیکسل (که مقدار محاسبه شده برای یک همسایگی دایره ای با شعاع 50 پیکسل و آستانه نزدیک به سطح شیب 8٪ محاسبه می شود)، به چهار کلاس تقسیم می کند. نقشه برجسته تغییر ارتفاع را برای هر سلول بر اساس حداکثر و حداقل ارتفاع در یک همسایگی دایره ای با شعاع 50 پیکسل نشان می دهد. نقشه نمایه درصد زمین نزدیک به سطح را در مناطق مرتفع و پست از منظره، دوباره با یک همسایگی دایره ای با شعاع 50 پیکسل نشان می دهد.
2.3. شرایط تعمیم کارتوگرافی: حداقل مساحت
ادامه کاهش اندازه عناصر نقشه تا حد قابل درک و قابل چاپ عملی نیست. دلایل این امر عبارتند از:
- –
-
اشیاء مهم باید بلافاصله آشکار شوند، نه فقط قابل درک.
- –
-
تفاوت در فرم باید به وضوح قابل تشخیص باشد.
- –
-
نور کم و رنگ های چاپ روشن کنتراست را کاهش می دهند.
- –
-
بهترین تکنیک ها و تجهیزات تکثیر و چاپ همیشه در دسترس نیستند یا ممکن است مقرون به صرفه نباشند.
بنابراین، عرض خطوط و فضاهای میانی در لندفرم های جزئی نباید از حداقل ابعاد مشخص شده کمتر باشد. برای نقشه های توپوگرافی و رنگ های چاپ سیاه یا خیلی تیره، مقدار زیر اعمال می شود: طول ضلع 0.3 میلی متر مربع جامد. اگرچه کوچک است، اما یک مربع جامد به این اندازه هنوز از یک نقطه قابل تشخیص است [ 11 ]. در نتیجه، تعداد پیکسلهایی که تقریباً با حداقل مساحت در مقیاسهای بزرگ و متوسط مطابقت دارند، با توجه به اندازه سلول دادههای منبع در این مطالعه ( یعنی 0.25 متر) محاسبه میشوند ( جدول 1 ).

جدول 1. حداقل مساحت و تعداد پیکسل های مربوطه در هر مقیاس بزرگ و متوسط.
مساحت یک پیکسل 0.25 × 0.25 = 0.0625 متر مربع است . تعداد پیکسل های مربوط به حداقل منطقه در 1:1000 0.09 ÷ 0.0625 = 1.44 است. با این حال، از آنجایی که نقشه زمین بریده شده (رستر) به یک نقشه برداری تبدیل می شود که پارامتر ساده سازی را به عنوان NO_SIMPLIFY تنظیم می کند، مناطق چند ضلعی مبتنی بر پیکسل محاسبه می شوند. بنابراین تعداد پیکسل های مربوط به حداقل مساحت در 1:1000 به عنوان نزدیکترین مقدار بزرگتر به مقدار محاسبه شده 1.44 برابر 2 در نظر گرفته می شود. از طرف دیگر، تعداد پیکسل های مربوط به حداقل مساحت در 1:5000 به طور مستقیم 2.25 ÷ 0.0625 = 36 محاسبه می شود. در نتیجه، 2 × 0.0625 = 0.125 m 2 و 36 × 0.0625 = 2.25 m 2 به عنوان آستانه استفاده می شود.، مقادیر معیار حداقل مساحت، در آزمون ذکر شده در روش.
3. نتایج و بحث
حداقل مقدار مساحت در نقشه لندفرم اولیه 0625/0 متر مربع بود که از آستانه کوچکتر بود، یعنی مقدار معیارهای حداقل مساحت 09/0 متر مربع و 25/2 متر مربع برای هر دو مقیاس 1:1000 و 1:5000 بود. نقشه های لندفرم در 1:1000 و 1:5000 با تعمیم نقشه لندفرم اولیه به دست آمد. هنگامی که مسیرها در فرآیند آمار کانونی (اکثریت) برای تعمیم نقشه لندفرم اولیه به چهار محله دایره رسیدند، حداقل مقدار مساحت در نقشه لندفرم بریده شده 1.1875 متر مربع بود که نزدیکترین مقدار بزرگتر به مقدار محاسبه شده 0.09 متر بود. 2. بدین ترتیب یک نقشه زمین فرم مناسب در 1:1000 به دست آمد. به طور مشابه، هنگامی که مسیرها در فرآیند آمار کانونی (اکثریت) برای تعمیم نقشه لندفرم اولیه به نه محله دایره رسیدند، حداقل مقدار مساحت در نقشه لندفرم بریده شده 3.125 متر مربع بود که نزدیکترین مقدار بیشتر به مقدار محاسبه شده بود. 2.25 متر مربع . بنابراین، یک نقشه زمین شکل مناسب در 1:5000 به دست آمد ( جدول 2 ).
جدول 2. نتایج نقشه های لندفرم و حداقل مناطق.
به منظور ارزیابی نتایج، یعنی بررسی بصری لندفرمها، از یک عکس ارتوفتوی منطقه مورد مطالعه در سال 2010 استفاده شد. نقشه های لندفرم با نماهای سه بعدی ارتوفوتو و LIDAR DEM تایید شدند ( شکل 3 ). نسخه های سایه دار آنها نیز به همین منظور تولید می شوند. نقشه لندفرم اولیه با نسخه سایه دار آن در شکل 4 نشان داده شده است. نقشه های لندفرم تعمیم یافته در 1:1000 و 1:5000 با نسخه سایه دار آنها در شکل 5 نشان داده شده است.
از 24 واحد شکل زمین مشخص شده توسط مورگان و لش، تنها چهار واحد در منطقه مورد مطالعه ما متمایز شدند: دشتهای نامنظم با تپههای بسیار کم ارتفاع باز، تپههای بسیار کم، و دشتهای هموار یا تقریباً هموار. از آنجایی که دریاچه های مصنوعی بالاتر از سطح دریا هستند، به عنوان دشت های مسطح یا تقریباً هموار نیز مشخص شدند.
مساحت هر نوع لندفرم در نقشه های نتیجه در جدول 3 آورده شده است. شکل غالب زمین در همه نقشه های نتیجه، تپه های باز بسیار کم ارتفاع، به دنبال آن تپه های بسیار کم، و دشت های هموار یا تقریباً هموار (که درصد زیادی از منطقه مورد مطالعه را پوشش می دهند) است. دشت های نامنظم با نقش برجسته کم کمترین شکل زمین است.
جدول 3. مساحت و درصد هر نوع لندفرم در نقشه های لندفرم اولیه، 1:1000 و 1:5000.
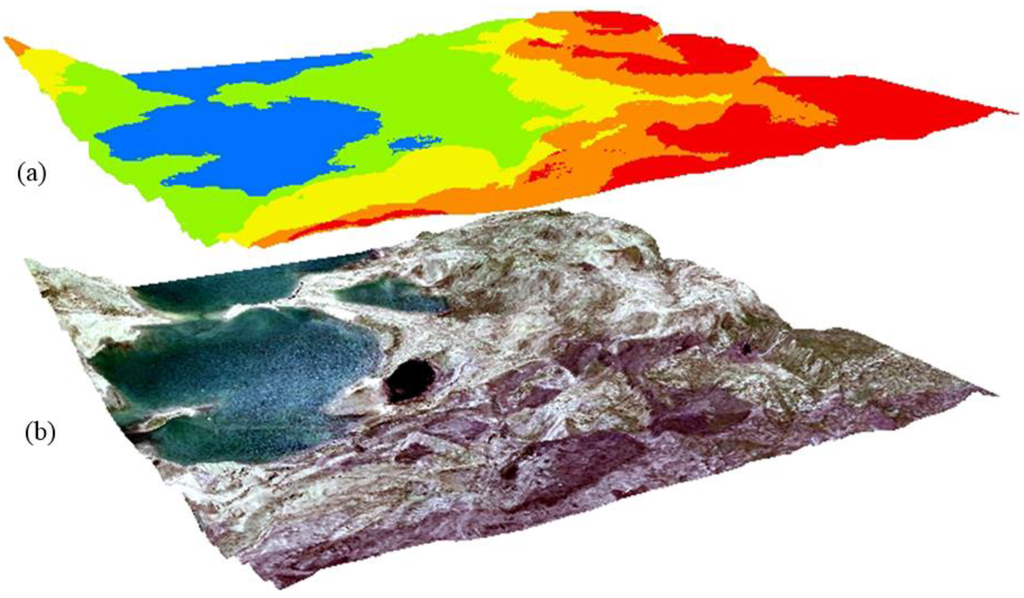
شکل 3. ( الف ) LIDAR DEM; ( ب ) ارتفتو.
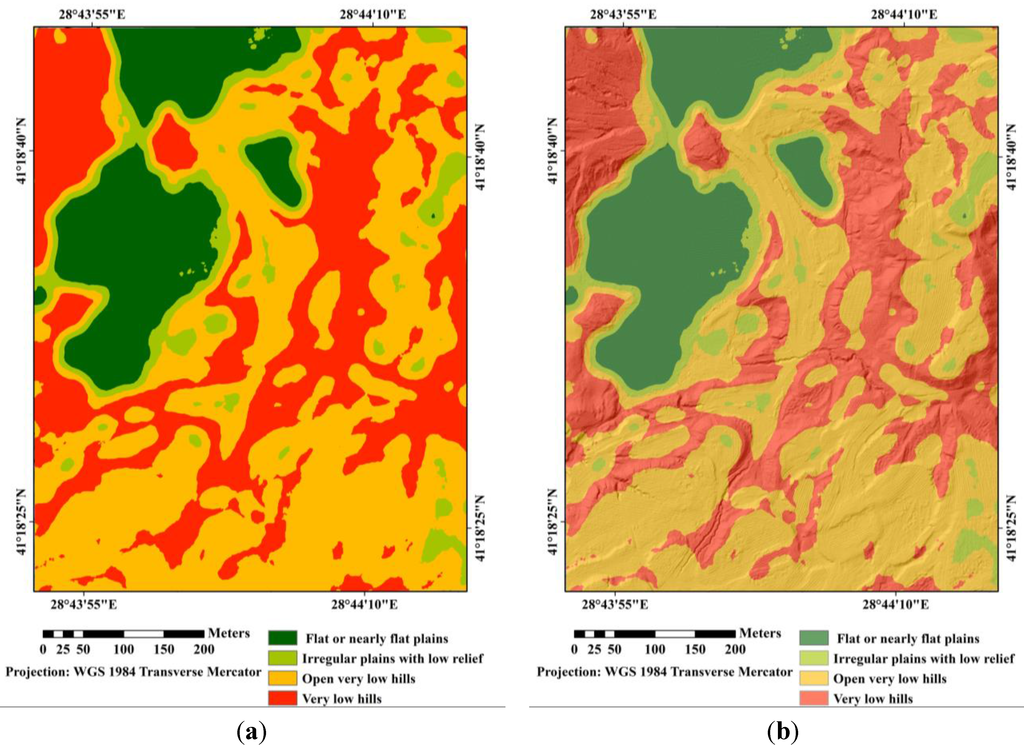
شکل 4. ( الف ) نقشه لندفرم اولیه. ( ب ) نقشه زمین شکل اولیه تپهای.
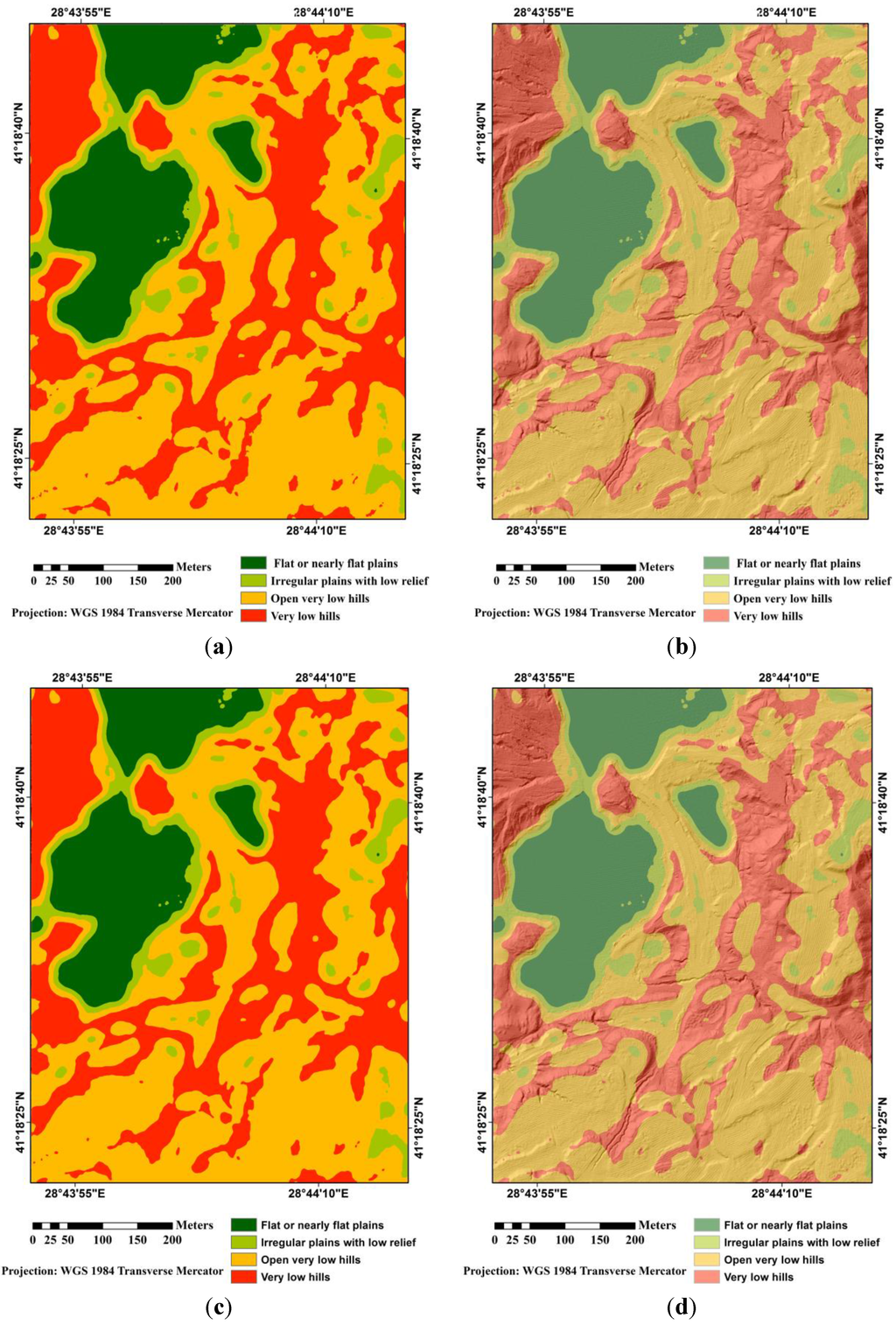
شکل 5. ( الف ) نقشه زمین شکل تعمیم یافته در 1:1000; ( ب ) نقشه زمین شکل تعمیم یافته تپه ای در 1:1000; ( ج ) نقشه لندفرم تعمیم یافته در 1:5000; ( د ) نقشه زمین شکل تعمیم یافته تپه ای در 1:5000.
4. نتیجه گیری
داده های LIDAR DEM را می توان برای به دست آوردن نقشه های شکل زمین در مقیاس های بزرگ به دلیل وضوح بالای آن استفاده کرد. از آنجایی که دادههای LIDAR DEM شکلهای لندفرم بسیار دقیقی را تولید میکنند، یک فرآیند تعمیم برای استخراج شکلهای زمین در مقیاسهای مشخص ضروری است. فرآیند تعمیم را می توان با ادغام مناطق کوچکتر به صورت بازگشتی مدیریت کرد. حداقل اندازه ها در کارتوگرافی می توانند به عنوان آستانه ای در فرآیند ادغام استفاده شوند. هیچ اندازه پنجره جستجوی ثابتی وجود ندارد که برای همه برنامههای کاربردی در همه اندازهها با هر وضوح DEM معتبر باشد. اندازه پنجره جستجو باید برای هر مطالعه، بسته به منطقه تحت پوشش و وضوح DEM تعیین شود. با این حال، کاربر باید در نظر داشته باشد که افزایش اندازه شعاع جستجو به نوبه خود زمان مورد نیاز برای پردازش مدل را افزایش می دهد.
علاوه بر این، همانطور که در این مطالعه وجود داشت، ممکن است طیف محدودی از ویژگیهای توپوگرافی به دلیل ارتفاع، شیب، برجستگی یا مشخصات محدود وجود داشته باشد. نقشه نهایی طبقه بندی لندفرم عناصر شکل زمین مانند دریاچه های مصنوعی را نشان نمی دهد. نکته اضافی در مورد استفاده موفقیت آمیز از روش مورگان و لش این است که باید مراقب بود که از تغییر مقادیر گمشده به NoData در طی مراحل طبقه بندی مجدد و نادیده گرفتن NoData در محاسبات در مراحل آمار کانونی جلوگیری شود.
مراجع و یادداشت ها
- هاموند، EH نقشه های لندفرم قاره ای در مقیاس کوچک. ان دانشیار صبح. Geogr. 1954 ، 44 ، 32-42. [ Google Scholar ] [ CrossRef ]
- هاموند، EH تجزیه و تحلیل خواص در جغرافیای شکل زمین: یک برنامه کاربردی برای نقشه برداری لندفرم در مقیاس وسیع. ان دانشیار صبح. Geogr. 1964 ، 54 ، 11-19. [ Google Scholar ] [ CrossRef ]
- دیکائو، ر. براب، EE; Mark, RM Landform طبقه بندی نیومکزیکو توسط کامپیوتر. سازمان زمین شناسی ایالات متحده ؛ سازمان زمین شناسی ایالات متحده: منلو پارک، کالیفرنیا، ایالات متحده آمریکا، 1991.
- دیکائو، ر. براب، EE; مارک، RM; Pike، RJ تجزیه و تحلیل شکل زمین مورفومتریک نیومکزیکو. Adv. ژئومورفوم. Z ژئومورفول. 1995 ، 101 ، 109-126. [ Google Scholar ]
- Brabyn, L. طبقه بندی کلان و فرم ها با استفاده از GIS. ITC J. 1997 ، 1 ، 26-40. [ Google Scholar ]
- مورگان، جی.ام. Lesh، A. توسعه نقشههای شکل زمین با استفاده از سازنده مدل ESRI. در مجموعه مقالات کنفرانس بین المللی کاربر ESRI 2005، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 25 تا 29 ژوئیه 2005.
- گالانت، آل. براون، DD; هافر، RM نقشه برداری خودکار از شکل زمین هاموند. IEEE Geosci. از راه دور. سنس لت. 2005 ، 2 ، 384-388. [ Google Scholar ] [ CrossRef ]
- هرواتین، م. پرکو، دی. مناسب بودن روش هاموند برای تعیین واحدهای شکل زمین در اسلوونی. Acta Geogr. اسلوو. 2009 ، 49 ، 343-366. [ Google Scholar ] [ CrossRef ]
- مرینا، AP; پروچو، MA; رویز، MA; Guerrero، IC Landform استان آلیکانته با استفاده از GIS. در مجموعه مقالات کنفرانس بین المللی 2011 در مورد روش های نوآورانه در طراحی محصول (IMProVe 2011)، سان سرولو، ونیز، ایتالیا، 15-17 ژوئن 2011.
- ویلیامز، ام. کوهن، دبلیو. Painho، M. تأثیر تنوع منظر بر طبقهبندی شکل زمین. جی. اسپات. Inf. علمی 2012 ، 5 ، 51-73. [ Google Scholar ] [ CrossRef ]
- رایتز، ا. بانتل، ای. هوینکس، سی. مرکل، جی. شلینگ، G. Kartographische Generalisierung: Topographische Karten. در Kartographische Schriftenreihe Herausgegeben Von Der Schweizerischen ; Schweizerische Gesellschaft für Kartographie: برن، سوئیس، 1975; صفحات 12-17. [ Google Scholar ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر